
シャシフレームとボディ間に可変式横剛性を示す接続要素を具備した自動車両
シャシフレーム(2)とボディ(4)とを有する自動車両(1)の前記シャシフレーム(2)と前記ボディ(4)との間に、複数の切換え式接続要素(10)が備えられる。前記各接続要素(10)は、左右の前輪(24)の車輪接地点(22)を結ぶ線(L)および/または左右の後輪(44)の車線接地点(42)を結ぶ線(L)の前側にもまた後側にも配置される。それにより旋回走行時には前記ボディ(4)から前記シャシフレーム(2)に曲げモーメントが加わるが、その結果前車軸(20)および/または後車軸(40)にはセルフステア挙動が生じることになる。前記セルフステア挙動には、当該車軸(20)ないしは(40)の前側の接続要素(10)または後側の接続要素(10)のいずれかを「アクティブモード」に切り換える、すなわち、これが可能な限り高い横剛性を示すようにその動作制御を行う一方で、それぞれ他方の接続要素(10)を「パッシブモード」に切り換える、すなわち、これが可能な限り低い横剛性を示すようにその動作制御を行うことにより、影響を与えることができる。前記動作制御は、例えば自動車両(1)の走行運転に由来する各種パラメータを制御量として使用する開ループ制御ユニット(8)を介して行われる。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、請求項1の上位概念(所謂おいて部分、プリアンブル部分)に記載のシャシフレームとボディを有する自動車両(モータビークル、自動車・トラック・オートバイ・オート三輪などの原動機付き車両、広義の自動車)に関する。
【背景技術】
【0002】
そのような自動車両は、特許文献1から知られている。
この公知である自動車両のセルフステア挙動に、どのように影響を与えられるかについて、この特許文献1からは説示を読み取ることはできない。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】欧州特許発明第0868338号明細書
【特許文献2】オーストリア特許発明第208243号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明の課題は、自動車両のセルフステア挙動に影響を与えられるように、公知である自動車両を改良発展させることにある。
【課題を解決するための手段】
【0005】
この課題は、請求項1の各特徴を具備した自動車両により解決される。請求項5は、自動車両のセルフステア挙動に影響を与える方法に関する。
同じ車軸の左右両輪の車輪接地点を結んだ線からそれぞれの接続要素までの距離により、旋回走行時には、路面に対して平行な平面内の微小な撓みという意味でのシャシフレームの変形を発生させる梃子の腕が生じることになる。このシャシフレームの変形と、それに随伴した、自動車両の前車軸および/または後車軸に及ぶ反作用は、自動車両のセルフステア挙動に影響を与えてしまう。特許文献1から知られる自動車両の場合は、接続要素の位置により、どのようなセルフステア挙動が設定されるかが決まっている。このため、セルフステア挙動を変更するのは不可能となっている。
【0006】
本発明の核心となる考え方は、左右の前輪および/または後輪の車輪接地点を結ぶ線の前側にもまた後側にも接続要素を一つずつ備えること、またその際にはこれらの接続要素の横剛性を可変とすることにある。それにより、それぞれの接続地点がいわば変位されることによって、ボディから入力される遠心力が作用する梃子の腕が変更されて、それに伴い自動車両のセルフステア挙動に影響を及ぼすことができるようにしている。
【0007】
接続要素は、「非常に高い横剛性」と「非常に低い横剛性」の両状態間で切換え可能であるように実施されることが好ましい。それにより、当該車軸において、車輪接地点を結ぶ線の前側または後側の少なくとも一つの接続要素の位置間をあれこれと切り換えて、セルフステア挙動に相応の影響を与えることができる。
【0008】
自動車両の前車軸にもまた後車軸にも、可変式横剛性を示す接続要素、好ましくは「非常に高い横剛性」と「非常に低い横剛性」の両状態間で切換え可能な接続要素が備えられる場合は、セルフステア挙動に複雑な方法で影響を与えることが可能となる。
【0009】
セルフステア挙動に影響を与えるためには、各接続要素の横剛性が決定的な意味を持つ。
これらの接続要素には、横力の伝達だけではなく、前後力および/または垂直力も伝達するという役割が与えられることが好ましい。そのために当該車軸においては、少なくとも一つの前側の接続要素も、また少なくとも一つの後側の接続要素も、いずれも単独で、自動車両のありとあらゆる運転状態において、機能面で申し分のない接続をボディとシャシフレーム間の保証できるようになっている。またその際には、本発明の有利な構成形態の一例として、それぞれの接続要素が、横剛性とならび、各接続要素の相応の動作制御を通じて、前後剛性および/または上下剛性の変化も達成されるように実施されるとよい。それにより例えば快適性(乗り心地)に影響を与えることができる。
【0010】
あるいはその代わりに、一方では水平力(特に横力)を、他方では垂直力を伝達するために、接続要素をグループ別に分けて備えるようにしてもよい。構造上、そのような分割を行うことによって、同じ車軸の前後に一つずつしか備えられない、横剛性が可変である接続要素により、自動車両のセルフステア挙動に影響を与えることが可能となる。
【0011】
上述の本発明の構成形態にしたがった接続要素は、場合によっては様々な中間状態においてオンオフすることもできる切換え式の要素として構成されている。
本発明の好ましい構成形態の一例においては、接続要素が、アクティブな調整ストロークを工面することなく作用する、すなわち、ほぼストロークゼロで作動するようになっている。
【0012】
本発明の別の代替構成形態においては、一定の調整ストロークおよび/または一定の調整角度を工面することができる接続要素が導入される。そのような「アクティブ」な接続要素により、自動車両の旋回走行時には、ボディのヨー角度がシャシフレームのヨー角度よりも小さくなるように影響を与えることが可能となる。ボディの「回転」がこのようにシャシフレームよりも僅かとなることによって、例えば自動車両のスラローム走行時には、非常にキビキビとした走行挙動を生じることになる。
【0013】
本発明の有利な構成形態は、従属請求項の対象となっている。
図面(図3から8)には、本発明の可能性のある実施形態が示されており、以下ではこれについて詳しく説明する。
【図面の簡単な説明】
【0014】
【図1】旋回走行時に発生する様々な力が自動車両のセルフステア挙動に与える影響を明確にした、旋回走行中の公知の自動車両を示す略図である。
【図2】旋回走行時に発生する様々な力が自動車両のセルフステア挙動に与える影響を明確にした、旋回走行中の公知の自動車両を示す略図である。
【図3】本発明にしたがった自動車両を示す略図である。
【図4】本発明にしたがった自動車両の図1と同様の図である。
【図5】本発明にしたがった自動車両の図1と同様の図である。
【図6】本発明にしたがった自動車両の図1と同様の図である。
【図7】本発明にしたがった自動車両の図1と同様の図である。
【図8】接続要素が代替方式で配置されている本発明にしたがった自動車両の略図である。
【発明を実施するための形態】
【0015】
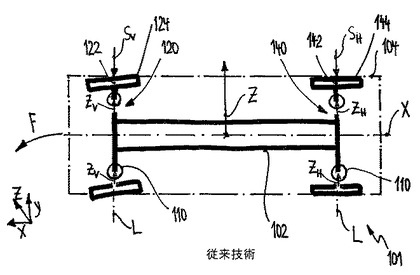
図1には、例えば特許文献2から知られるような従来技術にしたがった自動車両101が示されている。「ハフリンガー」なる名称でも知られるこの車両は、シャシフレーム102と一点鎖線で示されるボディ104とを有している。前後の車軸120ならびに140には、シャシフレーム102とボディ104とを接続する接続要素110がそれぞれ二つずつ備えられている。これらの接続要素110は、左右の前輪124の車輪接地点122を結ぶ線Lの上方ならびに左右の後輪144の車輪接地点142を結ぶ線Lの上方に位置している、すなわちこれらの線Lに対して車両縦中心軸Xの向きにはオフセットされていない。空間座標は、x(車両前後方向)、y(車両横方向)、z(車両上下方向)により表される。
【0016】
自動車両101の旋回走行時に発生する様々な力が、走行方向矢印Fで示される左カーブを走行する例をとり図示されている。ボディ104の遠心力Zの結果として生じるボディ104の支持力ZVおよびZHは、自動車両101の左右の前輪124の車輪接地点122を結ぶ線Lを含んだ鉛直断面内ならびに左右の後輪144の車輪接地点142を結ぶ線Lを含んだ鉛直断面内に延びている。したがってこれらの支持力ZVおよびZHは、ほかにも左右の前輪124に発生する横力SVならびに左右の後輪144に発生する横力ZHが延びているのと同じ鉛直断面yzに作用することになる。それにより、ボディ104からシャシフレーム102に曲げモーメントが入力されることはないために、自動車両101は旋回走行時にセルフステアなしのニュートラルな走行挙動を示す。
【0017】
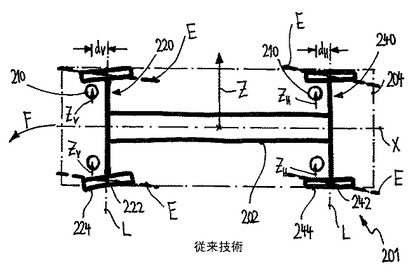
図2には、冒頭に掲記した特許文献1から知られている従来技術にしたがったさらにもう一台の自動車両201が示されている。この自動車両201では、シャシフレーム202とボディ204間の接続要素210が、左右の前輪224の車輪接地点222を結ぶ線Lおよび左右の後輪244の車輪接地点242を結ぶ線Lに対して車両前後方向xにオフセットされている。それによりシャシフレーム202には、ボディ204の遠心力Zの結果として生じる支持力ZVおよびZHが作用するための梃子の腕dVおよびdHが生じることになる。それにより旋回走行時にシャシフレーム202に作用する曲げモーメントによって、シャシフレーム202には弾性変形を来す。特にシャシフレーム202が極めて剛直に実施される場合は、曲げモーメントに起因するこうした変形には、実際には殆ど気づかずに終わってしまう。それにもかかわらず、これらの曲げモーメントにより、前後の車軸220ならびに240の各要素がシャシフレーム202と一緒に運動されるために、自動車両210には少なくとも傾向として一定のセルフステア挙動を生じてしまう。これと並行して前輪224および後輪244には、図2に一点鎖線Eにより誇張して描かれている切れ角を生じることになる。
【0018】
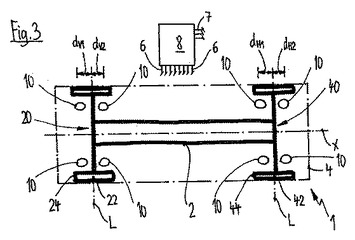
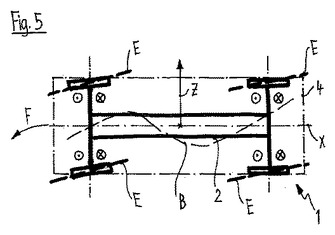
図3には、静止状態にあるときの、シャシフレーム2とボディ4とを有する本発明にしたがった自動車両1が示されるのに対して、図4から7には旋回走行時の本発明にしたがった自動車両1が示されている。前輪24を有する前車軸20および後輪44を有する後車軸44は、シャシフレーム2に受け入れられる。ボディ4のシャシフレーム2への結合は、左右の前輪24の車輪接地点22を結ぶ線Lならびに左右の後輪44の車輪接地点42を結ぶ線Lの前後に二つ一組で配置される合計八つの接続要素10を介して行われる。左右の車輪接地点を結ぶ線Lに対する各接続要素10の車両前後方向xへのオフセットには、符号dV1およびdV2、ならびに符号dH1およびdH2が付されている。それぞれの接続要素10は、接続要素10の横剛性を変更するための、詳細には図示されない一つの装置を有している。横剛性を変更するためのこれらの装置の動作制御は、制御ライン6を介して行われる。その制御ロジックは、開ループ制御ユニット8に保存されている。開ループ制御ユニット8には、各入力7から、例えば自動車両1の走行運転に由来する様々な信号が供給される。当然ながらこの開ループ制御ユニット8の代わりに、閉ループ制御ユニットを備え、各接続要素10の信号に配慮するようにしてもよい。
【0019】
接続要素10の横剛性の変更は、「最大横剛性」と「最小横剛性」の両状態間の切換えという趣旨で行われることが好ましい。「最大横剛性」と「最小横剛性」の両状態間で切換えを行うことにより、当該接続要素10は横力の伝達に関してオンオフされることになる。それにより接続要素10を起動したり不動化したりすることができる。接続要素10は二つ一組で自動車両1の車軸20および40の前後に備えられるために、いずれかの車軸20もしくは40の前後の接続要素10間で切換えを行うことにより、シャシフレーム2とボディ4間の接続状態に様々な幾何学的配座を作り出すことができる。
【0020】
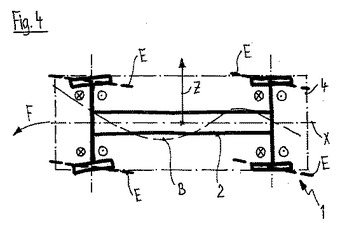
図3および8の図面には、中立状態にある接続要素10が丸で示されている。図4から7には、「最大横剛性」の状態にある接続要素10が丸囲みのバツにより示され、「最小横剛性」の状態にある接続要素が丸囲みの点により示されている。
【0021】
「最大横剛性」と「最小横剛性」の両状態以外にも、接続要素10は様々な中間状態をとれるようにするとよい。「最大横剛性」と「最小横剛性」の両状態間の移行が恒常的に行われるようにすると、例えば自動車両1の走行運転から感知されたデータに基づき、それまでとは異なる走行状態への定義済みの移行が起きることを導出できる場合には有意である。それにより、走行挙動の唐突な変化を回避できるようになり、快適性が向上されるという長所がもたらされる。それ以外にも、特定の走行状態において非常に優れた振動騒音乗り心地を達成するために、様々な中間状態のオンオフ制御を通じて微調整を行うことが可能となる。例えば接続要素10の剛性を、場合によっては接続要素10の横方向だけに限らずに低下させることにより、直進走行時にはタイヤノイズが低減され静粛性とあわせ乗り心地の向上が達成される。他方では、接続要素10の非常に高い剛性、特に高い横剛性により、「スポーティータイト」な設計が得られることになる。
【0022】
開ループ制御ユニット8は、好ましくは自動車両1の走行運転に由来する各種パラメータに従属して、例えば自動車両1の速度および/または操舵角および/または積載量に従属して、接続要素10の動作制御を行うようになっている。当然ながら自動車両1の周辺に由来する様々なパラメータ(例えば温度、降水、路面の摩擦係数等)も、動作制御に援用することができる。同様に開ループ制御ユニット8は、自動車両1の運転者の所望のセルフステア挙動に関する設定、例えば「スポーティ」―「ニュートラル」―「コンフォート」の中から選択された走行特性に(自動車両1の十分な走行安定性が維持される限界内で)配慮できるようにするとよい。
【0023】
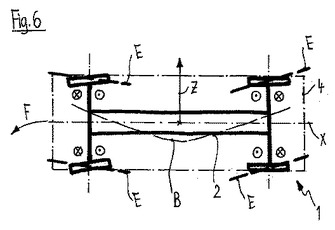
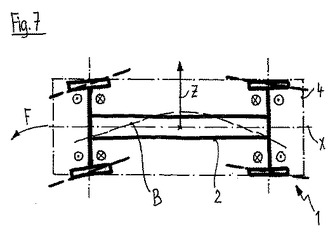
図4から7にはそれぞれ、ボディ4の支持力に起因して生じるシャシフレーム2の撓みが基本的にどのような進展を辿るのかが、破線の弾性曲線Bにより著しく誇張して示されている。実際には、曲げモーメントに起因する変形に気づくことは殆どない。シャシフレーム2が撓む結果発生する自動車両1のセルフステア挙動は、図4から7に(車輪中心22および42を通る)太い破線Eで示されている。
【0024】
図4に示される配座は、図2に示される従来技術から知られるような接続要素10の配置方式に当該する。図4にしたがって発生される、太い破線Eで象徴される自動車両1のセルフステア挙動により、基本的に、一種の「アンダステア修正」という意味での高速時の自動車両1の安定化がもたらされる。
【0025】
図5に示される配座では、自動車両1のセルフステア傾向が増幅される、すなわち若干「オーバステア」気味に変化するために、ステア挙動はよりダイレクトなものとなる。
図4および5に示される制御方式(前後の車軸とも同じ向きへのステア)は、何よりも特に高速走行時に適用されるものであるが、その適用対象はそれだけに限定されない。
【0026】
図6に示される接続要素10の制御方式によりアンダステアの走行挙動が発生するのに対して、図7に示されるように接続要素10を切り換えることによって、自動車両のオーバステアの走行挙動が達成される。
【0027】
図6および7に示される制御方式(前後の車軸で異なる向きへのステア)は、何よりも特に低速から中速走行時に適用されるものであるが、その適用対象はそれだけに限定されない。
基本的にシャシフレーム2が図4から7に破線の弾性曲線Bにより示されるように変形するためには、自動車両1の動特性に由来する相応に高い横力が存在する必要がある、すなわち、(縦列駐車時等の)操車速度を大幅に上回る速度が存在する必要があるといえる。
【0028】
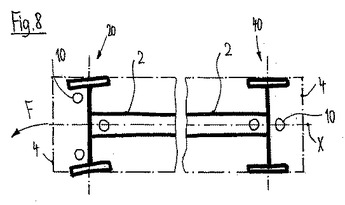
図8には、接続要素10の配置方式のさらに別の可能性が示されている。この代替配置方式では、シャシフレーム2とボディ4間に、上下力(および場合によっては前後力)を伝達するための、図示されないさらに別の接続要素を追加することが要求される。このようにシャシフレーム2とボディ4間で、異種の接続要素を二つのアッセンブリグループに分割することによって、横力(および場合によっては前後力)を伝達するためには、前車軸20および/または後車軸40の前後の一つの接続要素10だけで足りるようになる。
【0029】
図8の図面の左側の部分には、前車軸20を例にとり、前車軸20の前側に接続要素10が二つ、前車軸20の後側に接続要素10が一つだけ備えられた、三点式マウントが示されている。当然ながらこの三点式マウントは、前車軸20の前側に接続要素10を一つだけ備え、前車軸20の後側に接続要素10を二つ備えて実施されたものであってもかまわない。この三点式マウントを、前車軸20においても、また後車軸40においても実現する場合は、合計で六つの接続要素10が必要である。
【0030】
図8の図面の右側の部分には、後車軸40を例にとり、接続要素10が後車軸40の前後に一つずつ備えられた、二点式マウントが示されている。この二点式マウントを、前車軸20においても、また後車軸40においても実現する場合は、合計で四つの接続要素10が必要である。
【0031】
実地においては、ドライブトレイン(不図示)の所要取付け空間の関係上、接続要素10を図8に示されるように車両縦中心軸Xに配置するのは困難である。
以上をまとめて、次のように本発明を描写することができる。
【0032】
シャシフレーム2およびボディ4を有する自動車両1の、シャシフレーム2とボディ4との間に複数の切換え式接続要素10が備えられる。これらの接続要素10は、左右の前輪24の車輪接地点22を結ぶ線Lおよび/または左右の後輪44の車輪接地点42を結ぶ線Lの前側にもまた後側にも配置される。それにより旋回走行時にはボディ4からシャシフレーム2に曲げモーメントが加わるが、その結果、前車軸20および/または後車軸40にセルフステア挙動が生じることになる。このセルフステア挙動には、当該車軸20ないしは40の前側の接続要素10または後側の接続要素10のいずれかを「アクティブモード」に切り換える、すなわち、これが可能な限り高い横剛性を示すようにその動作制御を行う一方で、それぞれ他方の接続要素10を「パッシブモード」に切り換える、すなわち、これが可能な限り低い横剛性を示すようにその動作制御を行うことにより、影響を与えることができる。この動作制御は、例えば自動車両1の走行運転に由来する各種パラメータを制御量として使用する開ループ制御ユニット8を介して行われる。
【符号の説明】
【0033】
1 自動車両
2 シャシフレーム
4 ボディ
6 制御ライン
7 入力
8 制御ユニット
10 接続要素
22 車輪接地点
24 前輪
42 車輪接地点
44 後輪
101 自動車両
102 シャシフレーム
104 ボディ
110 接続要素
122 車輪接地点
124 前輪
142 車輪接地点
144 後輪
201 自動車両
202 シャシフレーム
204 ボディ
210 接続要素
222 車輪接地点
224 前輪
242 車輪接地点
244 後輪
B 弾性曲線
dH 梃子の腕
dH1 オフセット
dH2 オフセット
dV 梃子の腕
dV1 オフセット
dV2 オフセット
E セルフステア挙動
F 走行方向
L 左右の車輪接地点を結ぶ線
SH 横力
SV 横力
x 車両前後方向
X 車両縦中心軸
y 車両横方向
z 車両上下方向
Z 遠心力
ZH 支持力
【技術分野】
【0001】
本発明は、請求項1の上位概念(所謂おいて部分、プリアンブル部分)に記載のシャシフレームとボディを有する自動車両(モータビークル、自動車・トラック・オートバイ・オート三輪などの原動機付き車両、広義の自動車)に関する。
【背景技術】
【0002】
そのような自動車両は、特許文献1から知られている。
この公知である自動車両のセルフステア挙動に、どのように影響を与えられるかについて、この特許文献1からは説示を読み取ることはできない。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】欧州特許発明第0868338号明細書
【特許文献2】オーストリア特許発明第208243号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明の課題は、自動車両のセルフステア挙動に影響を与えられるように、公知である自動車両を改良発展させることにある。
【課題を解決するための手段】
【0005】
この課題は、請求項1の各特徴を具備した自動車両により解決される。請求項5は、自動車両のセルフステア挙動に影響を与える方法に関する。
同じ車軸の左右両輪の車輪接地点を結んだ線からそれぞれの接続要素までの距離により、旋回走行時には、路面に対して平行な平面内の微小な撓みという意味でのシャシフレームの変形を発生させる梃子の腕が生じることになる。このシャシフレームの変形と、それに随伴した、自動車両の前車軸および/または後車軸に及ぶ反作用は、自動車両のセルフステア挙動に影響を与えてしまう。特許文献1から知られる自動車両の場合は、接続要素の位置により、どのようなセルフステア挙動が設定されるかが決まっている。このため、セルフステア挙動を変更するのは不可能となっている。
【0006】
本発明の核心となる考え方は、左右の前輪および/または後輪の車輪接地点を結ぶ線の前側にもまた後側にも接続要素を一つずつ備えること、またその際にはこれらの接続要素の横剛性を可変とすることにある。それにより、それぞれの接続地点がいわば変位されることによって、ボディから入力される遠心力が作用する梃子の腕が変更されて、それに伴い自動車両のセルフステア挙動に影響を及ぼすことができるようにしている。
【0007】
接続要素は、「非常に高い横剛性」と「非常に低い横剛性」の両状態間で切換え可能であるように実施されることが好ましい。それにより、当該車軸において、車輪接地点を結ぶ線の前側または後側の少なくとも一つの接続要素の位置間をあれこれと切り換えて、セルフステア挙動に相応の影響を与えることができる。
【0008】
自動車両の前車軸にもまた後車軸にも、可変式横剛性を示す接続要素、好ましくは「非常に高い横剛性」と「非常に低い横剛性」の両状態間で切換え可能な接続要素が備えられる場合は、セルフステア挙動に複雑な方法で影響を与えることが可能となる。
【0009】
セルフステア挙動に影響を与えるためには、各接続要素の横剛性が決定的な意味を持つ。
これらの接続要素には、横力の伝達だけではなく、前後力および/または垂直力も伝達するという役割が与えられることが好ましい。そのために当該車軸においては、少なくとも一つの前側の接続要素も、また少なくとも一つの後側の接続要素も、いずれも単独で、自動車両のありとあらゆる運転状態において、機能面で申し分のない接続をボディとシャシフレーム間の保証できるようになっている。またその際には、本発明の有利な構成形態の一例として、それぞれの接続要素が、横剛性とならび、各接続要素の相応の動作制御を通じて、前後剛性および/または上下剛性の変化も達成されるように実施されるとよい。それにより例えば快適性(乗り心地)に影響を与えることができる。
【0010】
あるいはその代わりに、一方では水平力(特に横力)を、他方では垂直力を伝達するために、接続要素をグループ別に分けて備えるようにしてもよい。構造上、そのような分割を行うことによって、同じ車軸の前後に一つずつしか備えられない、横剛性が可変である接続要素により、自動車両のセルフステア挙動に影響を与えることが可能となる。
【0011】
上述の本発明の構成形態にしたがった接続要素は、場合によっては様々な中間状態においてオンオフすることもできる切換え式の要素として構成されている。
本発明の好ましい構成形態の一例においては、接続要素が、アクティブな調整ストロークを工面することなく作用する、すなわち、ほぼストロークゼロで作動するようになっている。
【0012】
本発明の別の代替構成形態においては、一定の調整ストロークおよび/または一定の調整角度を工面することができる接続要素が導入される。そのような「アクティブ」な接続要素により、自動車両の旋回走行時には、ボディのヨー角度がシャシフレームのヨー角度よりも小さくなるように影響を与えることが可能となる。ボディの「回転」がこのようにシャシフレームよりも僅かとなることによって、例えば自動車両のスラローム走行時には、非常にキビキビとした走行挙動を生じることになる。
【0013】
本発明の有利な構成形態は、従属請求項の対象となっている。
図面(図3から8)には、本発明の可能性のある実施形態が示されており、以下ではこれについて詳しく説明する。
【図面の簡単な説明】
【0014】
【図1】旋回走行時に発生する様々な力が自動車両のセルフステア挙動に与える影響を明確にした、旋回走行中の公知の自動車両を示す略図である。
【図2】旋回走行時に発生する様々な力が自動車両のセルフステア挙動に与える影響を明確にした、旋回走行中の公知の自動車両を示す略図である。
【図3】本発明にしたがった自動車両を示す略図である。
【図4】本発明にしたがった自動車両の図1と同様の図である。
【図5】本発明にしたがった自動車両の図1と同様の図である。
【図6】本発明にしたがった自動車両の図1と同様の図である。
【図7】本発明にしたがった自動車両の図1と同様の図である。
【図8】接続要素が代替方式で配置されている本発明にしたがった自動車両の略図である。
【発明を実施するための形態】
【0015】
図1には、例えば特許文献2から知られるような従来技術にしたがった自動車両101が示されている。「ハフリンガー」なる名称でも知られるこの車両は、シャシフレーム102と一点鎖線で示されるボディ104とを有している。前後の車軸120ならびに140には、シャシフレーム102とボディ104とを接続する接続要素110がそれぞれ二つずつ備えられている。これらの接続要素110は、左右の前輪124の車輪接地点122を結ぶ線Lの上方ならびに左右の後輪144の車輪接地点142を結ぶ線Lの上方に位置している、すなわちこれらの線Lに対して車両縦中心軸Xの向きにはオフセットされていない。空間座標は、x(車両前後方向)、y(車両横方向)、z(車両上下方向)により表される。
【0016】
自動車両101の旋回走行時に発生する様々な力が、走行方向矢印Fで示される左カーブを走行する例をとり図示されている。ボディ104の遠心力Zの結果として生じるボディ104の支持力ZVおよびZHは、自動車両101の左右の前輪124の車輪接地点122を結ぶ線Lを含んだ鉛直断面内ならびに左右の後輪144の車輪接地点142を結ぶ線Lを含んだ鉛直断面内に延びている。したがってこれらの支持力ZVおよびZHは、ほかにも左右の前輪124に発生する横力SVならびに左右の後輪144に発生する横力ZHが延びているのと同じ鉛直断面yzに作用することになる。それにより、ボディ104からシャシフレーム102に曲げモーメントが入力されることはないために、自動車両101は旋回走行時にセルフステアなしのニュートラルな走行挙動を示す。
【0017】
図2には、冒頭に掲記した特許文献1から知られている従来技術にしたがったさらにもう一台の自動車両201が示されている。この自動車両201では、シャシフレーム202とボディ204間の接続要素210が、左右の前輪224の車輪接地点222を結ぶ線Lおよび左右の後輪244の車輪接地点242を結ぶ線Lに対して車両前後方向xにオフセットされている。それによりシャシフレーム202には、ボディ204の遠心力Zの結果として生じる支持力ZVおよびZHが作用するための梃子の腕dVおよびdHが生じることになる。それにより旋回走行時にシャシフレーム202に作用する曲げモーメントによって、シャシフレーム202には弾性変形を来す。特にシャシフレーム202が極めて剛直に実施される場合は、曲げモーメントに起因するこうした変形には、実際には殆ど気づかずに終わってしまう。それにもかかわらず、これらの曲げモーメントにより、前後の車軸220ならびに240の各要素がシャシフレーム202と一緒に運動されるために、自動車両210には少なくとも傾向として一定のセルフステア挙動を生じてしまう。これと並行して前輪224および後輪244には、図2に一点鎖線Eにより誇張して描かれている切れ角を生じることになる。
【0018】
図3には、静止状態にあるときの、シャシフレーム2とボディ4とを有する本発明にしたがった自動車両1が示されるのに対して、図4から7には旋回走行時の本発明にしたがった自動車両1が示されている。前輪24を有する前車軸20および後輪44を有する後車軸44は、シャシフレーム2に受け入れられる。ボディ4のシャシフレーム2への結合は、左右の前輪24の車輪接地点22を結ぶ線Lならびに左右の後輪44の車輪接地点42を結ぶ線Lの前後に二つ一組で配置される合計八つの接続要素10を介して行われる。左右の車輪接地点を結ぶ線Lに対する各接続要素10の車両前後方向xへのオフセットには、符号dV1およびdV2、ならびに符号dH1およびdH2が付されている。それぞれの接続要素10は、接続要素10の横剛性を変更するための、詳細には図示されない一つの装置を有している。横剛性を変更するためのこれらの装置の動作制御は、制御ライン6を介して行われる。その制御ロジックは、開ループ制御ユニット8に保存されている。開ループ制御ユニット8には、各入力7から、例えば自動車両1の走行運転に由来する様々な信号が供給される。当然ながらこの開ループ制御ユニット8の代わりに、閉ループ制御ユニットを備え、各接続要素10の信号に配慮するようにしてもよい。
【0019】
接続要素10の横剛性の変更は、「最大横剛性」と「最小横剛性」の両状態間の切換えという趣旨で行われることが好ましい。「最大横剛性」と「最小横剛性」の両状態間で切換えを行うことにより、当該接続要素10は横力の伝達に関してオンオフされることになる。それにより接続要素10を起動したり不動化したりすることができる。接続要素10は二つ一組で自動車両1の車軸20および40の前後に備えられるために、いずれかの車軸20もしくは40の前後の接続要素10間で切換えを行うことにより、シャシフレーム2とボディ4間の接続状態に様々な幾何学的配座を作り出すことができる。
【0020】
図3および8の図面には、中立状態にある接続要素10が丸で示されている。図4から7には、「最大横剛性」の状態にある接続要素10が丸囲みのバツにより示され、「最小横剛性」の状態にある接続要素が丸囲みの点により示されている。
【0021】
「最大横剛性」と「最小横剛性」の両状態以外にも、接続要素10は様々な中間状態をとれるようにするとよい。「最大横剛性」と「最小横剛性」の両状態間の移行が恒常的に行われるようにすると、例えば自動車両1の走行運転から感知されたデータに基づき、それまでとは異なる走行状態への定義済みの移行が起きることを導出できる場合には有意である。それにより、走行挙動の唐突な変化を回避できるようになり、快適性が向上されるという長所がもたらされる。それ以外にも、特定の走行状態において非常に優れた振動騒音乗り心地を達成するために、様々な中間状態のオンオフ制御を通じて微調整を行うことが可能となる。例えば接続要素10の剛性を、場合によっては接続要素10の横方向だけに限らずに低下させることにより、直進走行時にはタイヤノイズが低減され静粛性とあわせ乗り心地の向上が達成される。他方では、接続要素10の非常に高い剛性、特に高い横剛性により、「スポーティータイト」な設計が得られることになる。
【0022】
開ループ制御ユニット8は、好ましくは自動車両1の走行運転に由来する各種パラメータに従属して、例えば自動車両1の速度および/または操舵角および/または積載量に従属して、接続要素10の動作制御を行うようになっている。当然ながら自動車両1の周辺に由来する様々なパラメータ(例えば温度、降水、路面の摩擦係数等)も、動作制御に援用することができる。同様に開ループ制御ユニット8は、自動車両1の運転者の所望のセルフステア挙動に関する設定、例えば「スポーティ」―「ニュートラル」―「コンフォート」の中から選択された走行特性に(自動車両1の十分な走行安定性が維持される限界内で)配慮できるようにするとよい。
【0023】
図4から7にはそれぞれ、ボディ4の支持力に起因して生じるシャシフレーム2の撓みが基本的にどのような進展を辿るのかが、破線の弾性曲線Bにより著しく誇張して示されている。実際には、曲げモーメントに起因する変形に気づくことは殆どない。シャシフレーム2が撓む結果発生する自動車両1のセルフステア挙動は、図4から7に(車輪中心22および42を通る)太い破線Eで示されている。
【0024】
図4に示される配座は、図2に示される従来技術から知られるような接続要素10の配置方式に当該する。図4にしたがって発生される、太い破線Eで象徴される自動車両1のセルフステア挙動により、基本的に、一種の「アンダステア修正」という意味での高速時の自動車両1の安定化がもたらされる。
【0025】
図5に示される配座では、自動車両1のセルフステア傾向が増幅される、すなわち若干「オーバステア」気味に変化するために、ステア挙動はよりダイレクトなものとなる。
図4および5に示される制御方式(前後の車軸とも同じ向きへのステア)は、何よりも特に高速走行時に適用されるものであるが、その適用対象はそれだけに限定されない。
【0026】
図6に示される接続要素10の制御方式によりアンダステアの走行挙動が発生するのに対して、図7に示されるように接続要素10を切り換えることによって、自動車両のオーバステアの走行挙動が達成される。
【0027】
図6および7に示される制御方式(前後の車軸で異なる向きへのステア)は、何よりも特に低速から中速走行時に適用されるものであるが、その適用対象はそれだけに限定されない。
基本的にシャシフレーム2が図4から7に破線の弾性曲線Bにより示されるように変形するためには、自動車両1の動特性に由来する相応に高い横力が存在する必要がある、すなわち、(縦列駐車時等の)操車速度を大幅に上回る速度が存在する必要があるといえる。
【0028】
図8には、接続要素10の配置方式のさらに別の可能性が示されている。この代替配置方式では、シャシフレーム2とボディ4間に、上下力(および場合によっては前後力)を伝達するための、図示されないさらに別の接続要素を追加することが要求される。このようにシャシフレーム2とボディ4間で、異種の接続要素を二つのアッセンブリグループに分割することによって、横力(および場合によっては前後力)を伝達するためには、前車軸20および/または後車軸40の前後の一つの接続要素10だけで足りるようになる。
【0029】
図8の図面の左側の部分には、前車軸20を例にとり、前車軸20の前側に接続要素10が二つ、前車軸20の後側に接続要素10が一つだけ備えられた、三点式マウントが示されている。当然ながらこの三点式マウントは、前車軸20の前側に接続要素10を一つだけ備え、前車軸20の後側に接続要素10を二つ備えて実施されたものであってもかまわない。この三点式マウントを、前車軸20においても、また後車軸40においても実現する場合は、合計で六つの接続要素10が必要である。
【0030】
図8の図面の右側の部分には、後車軸40を例にとり、接続要素10が後車軸40の前後に一つずつ備えられた、二点式マウントが示されている。この二点式マウントを、前車軸20においても、また後車軸40においても実現する場合は、合計で四つの接続要素10が必要である。
【0031】
実地においては、ドライブトレイン(不図示)の所要取付け空間の関係上、接続要素10を図8に示されるように車両縦中心軸Xに配置するのは困難である。
以上をまとめて、次のように本発明を描写することができる。
【0032】
シャシフレーム2およびボディ4を有する自動車両1の、シャシフレーム2とボディ4との間に複数の切換え式接続要素10が備えられる。これらの接続要素10は、左右の前輪24の車輪接地点22を結ぶ線Lおよび/または左右の後輪44の車輪接地点42を結ぶ線Lの前側にもまた後側にも配置される。それにより旋回走行時にはボディ4からシャシフレーム2に曲げモーメントが加わるが、その結果、前車軸20および/または後車軸40にセルフステア挙動が生じることになる。このセルフステア挙動には、当該車軸20ないしは40の前側の接続要素10または後側の接続要素10のいずれかを「アクティブモード」に切り換える、すなわち、これが可能な限り高い横剛性を示すようにその動作制御を行う一方で、それぞれ他方の接続要素10を「パッシブモード」に切り換える、すなわち、これが可能な限り低い横剛性を示すようにその動作制御を行うことにより、影響を与えることができる。この動作制御は、例えば自動車両1の走行運転に由来する各種パラメータを制御量として使用する開ループ制御ユニット8を介して行われる。
【符号の説明】
【0033】
1 自動車両
2 シャシフレーム
4 ボディ
6 制御ライン
7 入力
8 制御ユニット
10 接続要素
22 車輪接地点
24 前輪
42 車輪接地点
44 後輪
101 自動車両
102 シャシフレーム
104 ボディ
110 接続要素
122 車輪接地点
124 前輪
142 車輪接地点
144 後輪
201 自動車両
202 シャシフレーム
204 ボディ
210 接続要素
222 車輪接地点
224 前輪
242 車輪接地点
244 後輪
B 弾性曲線
dH 梃子の腕
dH1 オフセット
dH2 オフセット
dV 梃子の腕
dV1 オフセット
dV2 オフセット
E セルフステア挙動
F 走行方向
L 左右の車輪接地点を結ぶ線
SH 横力
SV 横力
x 車両前後方向
X 車両縦中心軸
y 車両横方向
z 車両上下方向
Z 遠心力
ZH 支持力
【特許請求の範囲】
【請求項1】
シャシフレームとボディを有する自動車両であって、前車軸と後車軸を有する走行装置が前記シャシフレームに受け入れられており、また前記ボディが複数の接続要素を介して前記シャシフレームに接続されており、さらに前記各接続要素が車両前後方向で見て前記前車軸および/または後車軸の左右の車輪の車輪接地点を結ぶ線に対して離間して配置されている自動車両において、
前記前車軸(20)および/または前記後車軸(40)に、車両前後方向(x)で見て、当該する左右の車輪接地点(22,42)を結ぶ線(L)の前側にも、また後側にも、接続要素(10)が少なくとも一つずつ配置され、その際に前記各接続要素(10)の横剛性が可変であることを特徴とする、自動車両。
【請求項2】
請求項1に記載の自動車両において、
前記各接続要素(10)の横剛性が、「非常に高い横剛性」と「非常に低い横剛性」の両状態間で切換え可能であることを特徴とする、自動車両。
【請求項3】
請求項1または2に記載の自動車両において、
前記前車軸(20)および/または前記後車軸(40)に、車両前後方向(x)で見て、当該する左右の車輪接地点(22,42)を結ぶ線(L)の前後に接続要素(10)が二つずつ配置されていることを特徴とする、自動車両。
【請求項4】
請求項1〜3のいずれか一項に記載の自動車両において、
少なくとも一つの接続要素(10)が、一定の調整ストロークおよび/または一定の調整角度を実行可能であるように構成されていることを特徴とする、自動車両。
【請求項5】
シャシフレームとボディを有する自動車両であって、前車軸と後車軸が前記シャシフレームに受け入れられており、前記ボディが複数の接続要素を介して前記シャシフレームに接続されている、自動車両のセルフステア挙動に影響を与える方法において、
前記前車軸(20)および/または前記後車軸(40)に、車両前後方向(x)で見て、前記前車軸(20)および/または前記後車軸(40)の当該する左右の車輪(24,44)の車輪接地点(22,42)を結ぶ線(L)の前側にも後側にも、横剛性が可変である少なくとも一つの接続要素(10)が備えられることを特徴とする、方法。
【請求項6】
請求項5に記載の方法において、
‐第1の設定モードにおいては、前記左右の車輪接地点(22,42)を結ぶ線(L)の前側の少なくとも一つの接続要素(10)が非常に高い横剛性を示すとともに、前記左右の車輪接地点(22,42)を結ぶ線(L)の後側の少なくとも一つの接続要素(10)が非常に低い横剛性を示し、
‐第2の設定モードにおいては、前記左右の車輪接地点(22,42)を結ぶ線(L)の前側の少なくとも一つの接続要素(10)が非常に低い横剛性を示すとともに、前記左右の車輪接地点(22,42)を結ぶ線(L)の後側の少なくとも一つの接続要素(10)が非常に高い横剛性を示す
ように、前記少なくとも一つの接続要素(10)の横剛性を変化させることを特徴とする、方法。
【請求項7】
請求項5または6に記載の方法において、
前記各接続要素(10)の横剛性を、自動車両(1)の走行運転に由来する少なくとも一つのパラメータに依存して変化させることを特徴とする、方法。
【請求項8】
請求項7に記載の方法において、
前記各接続要素(10)の横剛性を、自動車両(1)の速度および/または操舵角および/または積載量に依存して変化させることを特徴とする、方法。
【請求項9】
請求項4に記載の自動車両において適用される請求項5〜8のいずれか一項に記載の方法において、
自動車両(1)の旋回走行時には、前記ボディ(4)に前記シャシフレーム(2)のヨー角よりも小さいヨー角が発生するように、前記接続要素(10)の動作制御を行うこと を特徴とする、方法。
【請求項1】
シャシフレームとボディを有する自動車両であって、前車軸と後車軸を有する走行装置が前記シャシフレームに受け入れられており、また前記ボディが複数の接続要素を介して前記シャシフレームに接続されており、さらに前記各接続要素が車両前後方向で見て前記前車軸および/または後車軸の左右の車輪の車輪接地点を結ぶ線に対して離間して配置されている自動車両において、
前記前車軸(20)および/または前記後車軸(40)に、車両前後方向(x)で見て、当該する左右の車輪接地点(22,42)を結ぶ線(L)の前側にも、また後側にも、接続要素(10)が少なくとも一つずつ配置され、その際に前記各接続要素(10)の横剛性が可変であることを特徴とする、自動車両。
【請求項2】
請求項1に記載の自動車両において、
前記各接続要素(10)の横剛性が、「非常に高い横剛性」と「非常に低い横剛性」の両状態間で切換え可能であることを特徴とする、自動車両。
【請求項3】
請求項1または2に記載の自動車両において、
前記前車軸(20)および/または前記後車軸(40)に、車両前後方向(x)で見て、当該する左右の車輪接地点(22,42)を結ぶ線(L)の前後に接続要素(10)が二つずつ配置されていることを特徴とする、自動車両。
【請求項4】
請求項1〜3のいずれか一項に記載の自動車両において、
少なくとも一つの接続要素(10)が、一定の調整ストロークおよび/または一定の調整角度を実行可能であるように構成されていることを特徴とする、自動車両。
【請求項5】
シャシフレームとボディを有する自動車両であって、前車軸と後車軸が前記シャシフレームに受け入れられており、前記ボディが複数の接続要素を介して前記シャシフレームに接続されている、自動車両のセルフステア挙動に影響を与える方法において、
前記前車軸(20)および/または前記後車軸(40)に、車両前後方向(x)で見て、前記前車軸(20)および/または前記後車軸(40)の当該する左右の車輪(24,44)の車輪接地点(22,42)を結ぶ線(L)の前側にも後側にも、横剛性が可変である少なくとも一つの接続要素(10)が備えられることを特徴とする、方法。
【請求項6】
請求項5に記載の方法において、
‐第1の設定モードにおいては、前記左右の車輪接地点(22,42)を結ぶ線(L)の前側の少なくとも一つの接続要素(10)が非常に高い横剛性を示すとともに、前記左右の車輪接地点(22,42)を結ぶ線(L)の後側の少なくとも一つの接続要素(10)が非常に低い横剛性を示し、
‐第2の設定モードにおいては、前記左右の車輪接地点(22,42)を結ぶ線(L)の前側の少なくとも一つの接続要素(10)が非常に低い横剛性を示すとともに、前記左右の車輪接地点(22,42)を結ぶ線(L)の後側の少なくとも一つの接続要素(10)が非常に高い横剛性を示す
ように、前記少なくとも一つの接続要素(10)の横剛性を変化させることを特徴とする、方法。
【請求項7】
請求項5または6に記載の方法において、
前記各接続要素(10)の横剛性を、自動車両(1)の走行運転に由来する少なくとも一つのパラメータに依存して変化させることを特徴とする、方法。
【請求項8】
請求項7に記載の方法において、
前記各接続要素(10)の横剛性を、自動車両(1)の速度および/または操舵角および/または積載量に依存して変化させることを特徴とする、方法。
【請求項9】
請求項4に記載の自動車両において適用される請求項5〜8のいずれか一項に記載の方法において、
自動車両(1)の旋回走行時には、前記ボディ(4)に前記シャシフレーム(2)のヨー角よりも小さいヨー角が発生するように、前記接続要素(10)の動作制御を行うこと を特徴とする、方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公表番号】特表2012−523336(P2012−523336A)
【公表日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願番号】特願2012−503907(P2012−503907)
【出願日】平成22年3月31日(2010.3.31)
【国際出願番号】PCT/EP2010/002074
【国際公開番号】WO2010/115574
【国際公開日】平成22年10月14日(2010.10.14)
【出願人】(391009671)バイエリッシェ モートーレン ウエルケ アクチエンゲゼルシャフト (194)
【氏名又は名称原語表記】BAYERISCHE MOTOREN WERKE AKTIENGESELLSCHAFT
【Fターム(参考)】
【公表日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願日】平成22年3月31日(2010.3.31)
【国際出願番号】PCT/EP2010/002074
【国際公開番号】WO2010/115574
【国際公開日】平成22年10月14日(2010.10.14)
【出願人】(391009671)バイエリッシェ モートーレン ウエルケ アクチエンゲゼルシャフト (194)
【氏名又は名称原語表記】BAYERISCHE MOTOREN WERKE AKTIENGESELLSCHAFT
【Fターム(参考)】
[ Back to top ]