
シュレッダ
【課題】ケース本体の収納部内における被細断物の飛散を確実に防止することができるシュレッダを提供する。
【解決手段】ケース本体2内の上部に、投入口6から投入された紙・書類等の被細断物Aを駆動部14により細断駆動する細断部13、13を設け、前記ケース本体内の下部に、前記細断部で細断した細断屑を収容するゴミ箱Bが装填収納される収納部2bを設け、前記ケース本体の外周面に、少なくとも前記収納部の前方側を開放して、前記ゴミ箱の出し入れ可能にする開口部15を設けるとともに、該開口部に扉を開閉自在に設けたシュレッダ1において、前記収納部内に、ゴミ箱の有無もしくはゴミ箱内の細断屑の溜まり具合のいずれか又は両方を検知するゴミ箱装填状況検知手段16、17を設け、該検知手段16、17の作動により、前記駆動部14の動作を規制すること。
【解決手段】ケース本体2内の上部に、投入口6から投入された紙・書類等の被細断物Aを駆動部14により細断駆動する細断部13、13を設け、前記ケース本体内の下部に、前記細断部で細断した細断屑を収容するゴミ箱Bが装填収納される収納部2bを設け、前記ケース本体の外周面に、少なくとも前記収納部の前方側を開放して、前記ゴミ箱の出し入れ可能にする開口部15を設けるとともに、該開口部に扉を開閉自在に設けたシュレッダ1において、前記収納部内に、ゴミ箱の有無もしくはゴミ箱内の細断屑の溜まり具合のいずれか又は両方を検知するゴミ箱装填状況検知手段16、17を設け、該検知手段16、17の作動により、前記駆動部14の動作を規制すること。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば紙・書類等の不用紙を細断処理するシュレッダに係り、特に、ゴミ箱の装填状況を、ゴミ箱の有無およびゴミ箱内の細断屑の溜まり具合をもって検出可能にしたシュレッダに関する。
【背景技術】
【0002】
従来のシュレッダにおいては、ケース本体内の上部に、投入口から投入された紙・書類等の不用紙(以下、これを被細断物という)をモータにより細断駆動する細断部を設け、前記ケース本体内の下部に、前記細断部で細断した細断屑を収容するゴミ箱が装填収納される収納部を設け、前記ケース本体の外周面に、前記収納部の前方側を開放して、前記ゴミ箱の出し入れ可能にする開口部を設けるとともに、該開口部に扉を開閉自在に設けてなる構成を有するものがある。
【0003】
このようなシュレッダには、通常、扉の開閉状態を検出する扉開検知センサが設置されており、扉が開いていると、モータを停止状態に維持し、扉が閉まると、扉開検知センサを作動させて、モータの駆動操作が可能になるように制御している。
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかし、上記したような扉の開閉によるモータの制御機構では、ケース本体の収納部にゴミ箱が装填されないまま、モータの駆動操作による被細断物の細断が行われる危険性がある。また、たとえゴミ箱が装填されていたとしても、ゴミ箱内が被細断屑で満杯状態になっても、被細断物の細断が行われる危険性がある。このため、いずれにおいても、収納部内に細断屑が飛散する可能性があり、後の掃除が大変になるばかりか、無駄な手間を要するという問題があった。また、細断屑は細かい為、密度が高く、ゴミ箱に細断屑を溜めすぎると、ゴミ箱が重くなり、ゴミ箱の取りだしが困難になることもある。
【0005】
本発明の目的は、ケース本体の収納部内における被細断物の飛散を確実に防止したり、ゴミ箱の取扱いを容易にすることができるようにしたシュレッダを提供することにある。
【課題を解決するための手段】
【0006】
本発明によると、上記課題は、次のようにして解決される。
【0007】
(1) ケース本体内の上部に、投入口から投入された紙・書類等の被細断物を駆動部により細断駆動する細断部を設け、前記ケース本体内の下部に、前記細断部で細断した細断屑を収容するゴミ箱が装填収納される収納部を設け、前記ケース本体の外周面に、少なくとも前記収納部の前方側を開放して、前記ゴミ箱の出し入れ可能にする開口部を設けるとともに、該開口部に扉を開閉自在に設けたシュレッダにおいて、前記収納部内に、ゴミ箱の有無もしくはゴミ箱内の細断屑の溜まり具合のいずれか又は両方を検知するゴミ箱装填状況検知手段を設け、該検知手段の作動により、前記駆動部の動作を規制する。
【0008】
(2)上記(1)項において、前記ゴミ箱装填状況検知手段は、前記ゴミ箱の空箱状態を、ゴミ箱の有無をもって検出する第1の重量センサである。
【0009】
(3)上記(1)項において、前記ゴミ箱装填状況検知手段は、前記ゴミ箱の細断屑満杯状態を、細断屑を溜たゴミ箱の重さを検出する第2の重量センサである。
【0010】
(4)上記(1)〜(3)項において、前記ゴミ箱装填状況検知手段は、ゴミ箱の空箱状態からゴミ箱の細断屑満杯状態までの重さを、連続的に検出するディジタル秤センサである。
【発明の効果】
【0011】
請求項1記載の発明によると、ゴミ箱装填状況検知手の作動により、収納部内におけるゴミ箱の非装填状態及びゴミ箱への細断屑の溜まり具合を検知して、駆動部を停止させるようになっているため、ゴミ箱が無くて、収納部内に細断屑が飛散したり、ゴミ箱に細断屑が満杯以上に入りすぎて、収納部内に細断屑が飛散したりするのを確実に防止することがで、かつ、満杯時の細断屑の重さを制限することにより、非力者においても、細断屑を収納したゴミ箱の取扱いを容易にすることができる。
【0012】
請求項2記載の発明によると、ゴミ箱装填状況検知手として、ゴミ箱の有無の検出を、ゴミ箱の空の重さで作動する安価なリミットスイッチを用いることができるため、コストの低減化を図ることができる。
【0013】
請求項3記載の発明によると、ゴミ箱装填状況検知手として、ゴミ箱の細断屑満杯状態を、細断屑を溜たゴミ箱の重さを量って検出するため、重さによって満杯状態を制限できる。また、満杯の重量を容易に設定可能であることから、ゴミ箱満杯時の取扱いを、取り扱う紙質や管理者の体力などに合わせて設定できる。
【0014】
請求項4記載の発明によると、ゴミ箱装填状況検知手として、ディジタル秤センサを使用することができるため、ゴミ箱の非装填状態とゴミ箱への細断屑の溜まり具合を、1つの電子センサユニットで検出することができ、しかもディジタル秤センサは、ディジタル体重計のセンサユニットとして、高精度のものが安価に提供されており、構造の簡素化とコストの低減化を図ることができる。
【発明を実施するための最良の形態】
【0015】
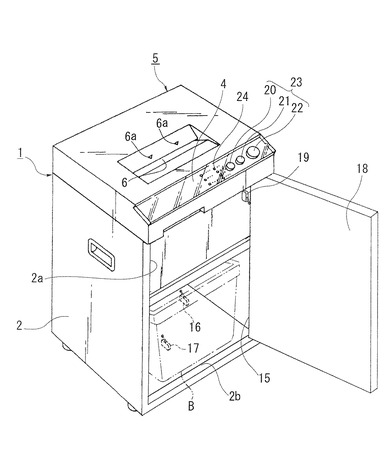
以下、本発明を図面に基づいて詳細に説明すると、図1は、本発明のシュレッダの一実施形態における扉開状態を示す斜視図、図2は、縦断側面図、図3は、各検知手段による表示系及び駆動系の制御ブロック図、図4は、ゴミ箱の有無検知手段及び扉の開閉検知手段による駆動部の制御状態を示すフローチャートである。
【0016】
本実施形態のシュレッダ(1)は、図1に示すように、ケース本体(2)が、平面視前後が短辺で、左右が長辺の縦長の直方体からなり、上方が開放し、上下に収納空間(2a)(2b)が区画形成されているとともに、その外周面の前面が開口するように開放されている。
【0017】
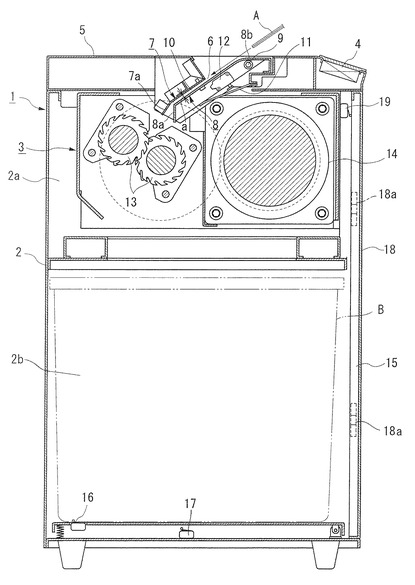
前記ケース本体(2)内の上部収納空間(2a)には、細断ユニット(3)が取外し可能に組付け配置されている。前記細断ユニット(3)は、図2に示すように、前部に操作パネル(4)を備えた上面カバー(5)を有し、この上面カバー(5)の上面略中央部には、紙・書類等の被細断物(A)が投入される投入口(6)が形成されている。この投入口(6)は、ケース本体(2)の後方に向けて所定の角度で下降傾斜する上下一対のガイド板(7)(8)で形成されている。上側ガイド板(7)は、先端部(7a)を下方に屈曲させて上面カバー(5)に固定されており、下側ガイド(8)は、その先端部(8a)を上側ガイド板(7)の先端部(7a)より前方内側に位置させて垂下状態で屈曲させてなるとともに、その入口側後端部(8b)が軸(9)によりカバー(5)に枢着されて、出口側先端部(8a)が下方に傾動自在に取り付けられている。
【0018】
前記上側ガイド板(7)と下側ガイド(8)とは、数枚の紙類が重ね状態で挿入可能な挿入通路(10)を形成するような間隔(a)で平行に配置され、この間隔(a)を維持するように、下側ガイド(8)が板バネ(11)により上方に付勢されており、前記投入口(6)から挿入通路(10)の間隔(a)以上の人の手や厚紙等が挿入されたとき、下側ガイド(8)が板バネ(11)の付勢力に抗して下方に傾動し、この傾動による下側ガイド(8)の移動をリミットスイッチからなる厚物センサ(12)で検知するようになっている。また、上側ガイド板(7)の先端部(7a)は、下側ガイド(8)の先端部(8a)と対面するように屈曲し、挿入通路(10)から人の手や硬い物等が挿入されたとき、その挿入を抑止するようになっている。
【0019】
前記上面カバー(5)における投入口(6)の下部には、細断部となる一対の細断ローラ(13)(13)が噛合せ配置され、これら細断ローラ(13)(13)間の上部には、前記投入口(6)から挿入通路(10)を経て、被細断物(A)が投入されるようになっている。前記細断ローラ(13)(13)は、上面カバー(5)の下部に隣接させて配置された正逆転可能なモータ(14)に連動し、このモータ(14)の正転駆動により、被細断物(A)の細断駆動が行われるようになっている。
【0020】
前記ケース本体(2)内の下部収納空間(2b)には、前面の開口部(15)から前記細断部で細断した細断屑を収容するゴミ箱(B)が出し入れ可能に装填収納されるようになっている。そして、前記下部収納空間(2b)の内底面には、リミットスイッチからなる第1の重量センサ(16)とリミットスイッチからなる第2の重量センサ(17)とが設置されており、第1の重量センサ(16)は、前記ゴミ箱(B)の空箱状態における重さを検出して、ゴミ箱(B)の有無を検知するゴミ箱検知センサとし、第2の重量センサ(17)は、前記ゴミ箱(B)内における細断屑の満杯時の重さを検出するゴミ箱満杯検知センサとしてなるもので、これにより、前記ゴミ箱(B)の非装填状態及び細断屑満杯状態を、ゴミ箱装填状況として2段階的に検知するゴミ箱装填状況検知手を構成している。
【0021】
また、前記ケース本体(2)の前面には、扉(18)が開閉自在に設けられており、この扉(18)の開閉状態は、ケース本体(2)の扉ヒンジ部(18a)近傍に設けたリミットスイッチからなる扉開検知センサ(19)により検出されるようになっている。
【0022】
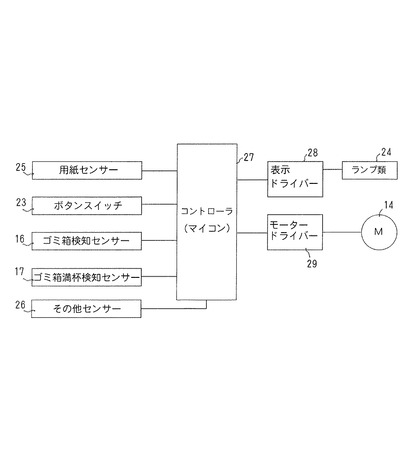
ところで、前記操作パネル(4)上には、図1に示すように、スタート/リスタート釦(20)、リバース釦(21)、ストップ釦(22)等のボタンスイッチ類(23)や、電源、運転停止中、厚物有り、ゴミ箱満杯、扉開・ゴミ箱なし、モータ過熱等を表示するLED表示ランプ群(24)が設けられている。これらのボタンスイッチ類(23)や、上述したゴミ箱検知センサ(16)、扉開検知センサ(19)は、図3に示すように、前記上面カバー(5)の投入口(6)に設けられる被細断物(A)の挿入及び幅を見地する用紙センサ(25)、その他のセンサ(26)等と共にマイコン(マイクロコンピュータシステムの略称である)からなるコントローラ(27)に接続され、このコントローラ(27)により、表示ドライバ(28)を介してLED表示ランプ群(24)を点灯表示し、また、モータドライバ(29)を介してモータ(14)を駆動制御している。
【0023】
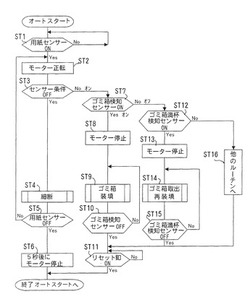
次に、前記ゴミ箱(B)の有無検知手段及び扉の開閉検知手段による駆動部の制御状態を図4に基づいて説明する。なお、スタートモードとしては、オートモードと手動モードとに選択的に切換え可能になっており、本実施形態においては、オートモードを例に説明する。
【0024】
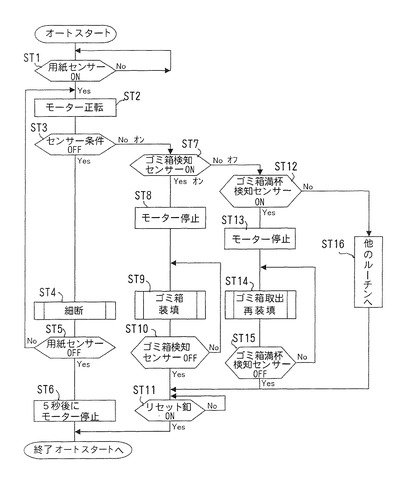
まず、ステップ(以下、STと略記する)1において、被細断物(A)が上面カバー(5)の投入口(6)に投入されると、用紙センサ(25)により被細断物(A)の検知が行われる。ここで、被細断物(A)が投入口(6)に挿入可能な所定の幅寸法以下の場合には、用紙センサ(25)がON(検出)し、ST2でモータ(14)が正転駆動し、ST3に移行する。ST1において、用紙センサ(25)がOFF(非検出)の場合には、元に戻る。
【0025】
ST3では、安全検出用の全てのセンサ条件が検知され、安全検出用の全てのセンサがOFF(非検出)の場合には、モータ(14)の正転駆動による細断ローラ(13)(13)の駆動で、被細断物(A)の細断が行われる(ST4)。この状態で、用紙センサ(25)がOFFになり、被細断物(A)の投入終了が判断されると(ST5)、5秒後にモータ(14)の運転が停止され(ST6)、細断を終了し、オートスタートの待機状態に戻る。また、ST5において、用紙センサ(25)がON状態を続行している場合には、ST2に戻り、用紙センサ(25)がOFFになるまで、被細断物(A)の細断が行われる。
【0026】
ST3において、安全検出用の全てのセンサのいずれか一つがONの場合には、ST7に移行し、その安全検出用のセンサの1っとして、本実施形態でのゴミ箱(B)の装填状態の有無が判断される。
【0027】
ST7において、ゴミ箱検知センサ(16)がON(無しを検出)の場合には、ゴミ箱(B)がケース本体(2)内の収納空間(2b)に装填されていないと判断して、モータ(14)の運転を停止し(ST8)、扉(18)を開扉して、ケース本体(2)内の収納空間(2b)へのゴミ箱(B)の装填が行われる(ST9)。このとき、扉(18)の開扉で、扉開検知センサ(19)がON(開を検出)になり、ゴミ箱検知センサ(16)のONと共にモータ(14)の運転を停止するようになっている。
【0028】
ST9において、ゴミ箱(B)の装填が終了し、ゴミ箱検知センサ(16)がOFF(無しを非検出)なると(ST10)、扉(18)を閉扉して、扉開検知センサ(19)のOFF(開を非検出)後、リセット釦(図示せず)をON(押圧操作)にし(ST11)、オートスタートの待機状態に戻り、スタート/リスタート釦(20)の押釦により、被細断物(A)の細断を開始する。また、ST10で、ゴミ箱検知センサ(16)がON状態のままであると、ゴミ箱(B)の装填が不完全であると判断され、ST9に戻り、ゴミ箱検知センサ(16)がOFFになるまで、ゴミ箱(B)の装填のやり直しが繰り返し行われる。
【0029】
ST7において、ゴミ箱(B)が正常に装填されて、ゴミ箱検知センサ(16)がOFF状態を維持しているとき、ゴミ箱(B)内における細断屑の満杯状態の判断が行われる(ST12)。
【0030】
ST12において、ゴミ箱満杯検知センサ(17)がON(満杯を検出)になると、ゴミ箱(B)内が細断屑で満杯であると判断して、モータ(14)の運転を停止し(ST13)、扉(18)を開扉して、ケース本体(2)内の収納空間(2b)からゴミ箱(B)を取り出し、細断屑を排除後、再びゴミ箱(B)の装填が行われる(ST14)。
【0031】
この際に、満杯時の重量設定が重すぎると、非力者ではゴミ箱(B)を取り出して、細断屑を排除する処理が困難となる場合を生じる。そのため、満杯の状況は、ゴミ箱(B)内の細断屑の嵩ではなく、重量とした方が、利用者それぞれ利用状況に適合する。例えば、処理する紙の質がアート紙と事務用コピー普通紙とでは、同じ嵩でも重量が大幅に異なり、紙質は、利用者や会社においては部署によって異なることが多い。
【0032】
そこで、ゴミ箱満杯検知センサ(17)を、体重計等に使用されているディジタル秤センサとして、ケース本体(2)内の収納空間(2b)におけるゴミ箱(B)の重量を、連続的(100g〜100kg)に量り、その重量値をコントローラ(27)において、数値処理して、ゴミ箱検知センサ(16)の検知状態と、ゴミ箱満杯検知センサ(17)の検知状態と同じ信号を生成して、図4のフローチャートに適合させる。
この際、ゴミ箱満杯検知センサ(17)の満杯値を、操作パネル(4)において設定できるようにしてもよく、メンテナンス設定の初期値として設定できるようにしてもよい。
【0033】
ST14において、ゴミ箱(B)の装填が終了し、ゴミ箱満杯検知センサ(17)がOFFなると(ST15)、扉(18)を閉扉して、扉開検知センサ(19)のOFF後、ST11に移行し、リセット釦(図示せず)をONにして、オートスタートの待機状態に戻る。
【0034】
ST12において、ゴミ箱満杯検知センサ(17)がOFF状態で、ゴミ箱(B)内における細断屑の蓄積に余裕がある場合には、安全検知用のその他のルーチンへ移行し(ST16)、安全検知用の他のセンサ条件が正常であると判断された場合に、オートスタートの待機状態に戻る。
【図面の簡単な説明】
【0035】
【図1】本発明のシュレッダの一実施形態における扉開状態を示す斜視図である。
【図2】縦断側面図である。
【図3】各検知手段による表示系及び駆動系の制御ブロック図である。
【図4】ゴミ箱の有無検知手段及び扉の開閉検知手段による駆動部の制御状態を示すフローチャートである。
【符号の説明】
【0036】
(1) シュレッダ
(2) ケース本体
(2a) 上部収納空間
(2b) 下部収納空間(収納部)
(3) 細断ユニット
(4) 操作パネル
(5) 上面カバー
(6) 投入口
(7) 上側ガイド板
(7a) 先端部
(8) 下側ガイド板
(8a) 先端部
(8b) 後端部
(9) 軸
(10) 挿入通路
(11) 板バネ
(12) 厚物センサ
(13) 細断ローラ(細断部)
(14) モータ(駆動部)
(15) 開口部
(16) 第1の重量センサ(ゴミ箱検知センサ)
(17) 第2の重量センサ(ゴミ箱満杯検知センサ)
(18) 扉
(18a) 扉ヒンジ部
(19) 扉開検知センサ
(20) スタート/リスタート釦
(21) リバース釦
(22) ストップ釦
(23) ボタンスイッチ類
(24) LED表示ランプ群
(25) 用紙センサ
(26) その他のセンサ
(27) コントローラ
(28) 表示ドライバ
(29) モータドライバ
(A) 被細断物
(B) ゴミ箱
(a) 間隔
【技術分野】
【0001】
本発明は、例えば紙・書類等の不用紙を細断処理するシュレッダに係り、特に、ゴミ箱の装填状況を、ゴミ箱の有無およびゴミ箱内の細断屑の溜まり具合をもって検出可能にしたシュレッダに関する。
【背景技術】
【0002】
従来のシュレッダにおいては、ケース本体内の上部に、投入口から投入された紙・書類等の不用紙(以下、これを被細断物という)をモータにより細断駆動する細断部を設け、前記ケース本体内の下部に、前記細断部で細断した細断屑を収容するゴミ箱が装填収納される収納部を設け、前記ケース本体の外周面に、前記収納部の前方側を開放して、前記ゴミ箱の出し入れ可能にする開口部を設けるとともに、該開口部に扉を開閉自在に設けてなる構成を有するものがある。
【0003】
このようなシュレッダには、通常、扉の開閉状態を検出する扉開検知センサが設置されており、扉が開いていると、モータを停止状態に維持し、扉が閉まると、扉開検知センサを作動させて、モータの駆動操作が可能になるように制御している。
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかし、上記したような扉の開閉によるモータの制御機構では、ケース本体の収納部にゴミ箱が装填されないまま、モータの駆動操作による被細断物の細断が行われる危険性がある。また、たとえゴミ箱が装填されていたとしても、ゴミ箱内が被細断屑で満杯状態になっても、被細断物の細断が行われる危険性がある。このため、いずれにおいても、収納部内に細断屑が飛散する可能性があり、後の掃除が大変になるばかりか、無駄な手間を要するという問題があった。また、細断屑は細かい為、密度が高く、ゴミ箱に細断屑を溜めすぎると、ゴミ箱が重くなり、ゴミ箱の取りだしが困難になることもある。
【0005】
本発明の目的は、ケース本体の収納部内における被細断物の飛散を確実に防止したり、ゴミ箱の取扱いを容易にすることができるようにしたシュレッダを提供することにある。
【課題を解決するための手段】
【0006】
本発明によると、上記課題は、次のようにして解決される。
【0007】
(1) ケース本体内の上部に、投入口から投入された紙・書類等の被細断物を駆動部により細断駆動する細断部を設け、前記ケース本体内の下部に、前記細断部で細断した細断屑を収容するゴミ箱が装填収納される収納部を設け、前記ケース本体の外周面に、少なくとも前記収納部の前方側を開放して、前記ゴミ箱の出し入れ可能にする開口部を設けるとともに、該開口部に扉を開閉自在に設けたシュレッダにおいて、前記収納部内に、ゴミ箱の有無もしくはゴミ箱内の細断屑の溜まり具合のいずれか又は両方を検知するゴミ箱装填状況検知手段を設け、該検知手段の作動により、前記駆動部の動作を規制する。
【0008】
(2)上記(1)項において、前記ゴミ箱装填状況検知手段は、前記ゴミ箱の空箱状態を、ゴミ箱の有無をもって検出する第1の重量センサである。
【0009】
(3)上記(1)項において、前記ゴミ箱装填状況検知手段は、前記ゴミ箱の細断屑満杯状態を、細断屑を溜たゴミ箱の重さを検出する第2の重量センサである。
【0010】
(4)上記(1)〜(3)項において、前記ゴミ箱装填状況検知手段は、ゴミ箱の空箱状態からゴミ箱の細断屑満杯状態までの重さを、連続的に検出するディジタル秤センサである。
【発明の効果】
【0011】
請求項1記載の発明によると、ゴミ箱装填状況検知手の作動により、収納部内におけるゴミ箱の非装填状態及びゴミ箱への細断屑の溜まり具合を検知して、駆動部を停止させるようになっているため、ゴミ箱が無くて、収納部内に細断屑が飛散したり、ゴミ箱に細断屑が満杯以上に入りすぎて、収納部内に細断屑が飛散したりするのを確実に防止することがで、かつ、満杯時の細断屑の重さを制限することにより、非力者においても、細断屑を収納したゴミ箱の取扱いを容易にすることができる。
【0012】
請求項2記載の発明によると、ゴミ箱装填状況検知手として、ゴミ箱の有無の検出を、ゴミ箱の空の重さで作動する安価なリミットスイッチを用いることができるため、コストの低減化を図ることができる。
【0013】
請求項3記載の発明によると、ゴミ箱装填状況検知手として、ゴミ箱の細断屑満杯状態を、細断屑を溜たゴミ箱の重さを量って検出するため、重さによって満杯状態を制限できる。また、満杯の重量を容易に設定可能であることから、ゴミ箱満杯時の取扱いを、取り扱う紙質や管理者の体力などに合わせて設定できる。
【0014】
請求項4記載の発明によると、ゴミ箱装填状況検知手として、ディジタル秤センサを使用することができるため、ゴミ箱の非装填状態とゴミ箱への細断屑の溜まり具合を、1つの電子センサユニットで検出することができ、しかもディジタル秤センサは、ディジタル体重計のセンサユニットとして、高精度のものが安価に提供されており、構造の簡素化とコストの低減化を図ることができる。
【発明を実施するための最良の形態】
【0015】
以下、本発明を図面に基づいて詳細に説明すると、図1は、本発明のシュレッダの一実施形態における扉開状態を示す斜視図、図2は、縦断側面図、図3は、各検知手段による表示系及び駆動系の制御ブロック図、図4は、ゴミ箱の有無検知手段及び扉の開閉検知手段による駆動部の制御状態を示すフローチャートである。
【0016】
本実施形態のシュレッダ(1)は、図1に示すように、ケース本体(2)が、平面視前後が短辺で、左右が長辺の縦長の直方体からなり、上方が開放し、上下に収納空間(2a)(2b)が区画形成されているとともに、その外周面の前面が開口するように開放されている。
【0017】
前記ケース本体(2)内の上部収納空間(2a)には、細断ユニット(3)が取外し可能に組付け配置されている。前記細断ユニット(3)は、図2に示すように、前部に操作パネル(4)を備えた上面カバー(5)を有し、この上面カバー(5)の上面略中央部には、紙・書類等の被細断物(A)が投入される投入口(6)が形成されている。この投入口(6)は、ケース本体(2)の後方に向けて所定の角度で下降傾斜する上下一対のガイド板(7)(8)で形成されている。上側ガイド板(7)は、先端部(7a)を下方に屈曲させて上面カバー(5)に固定されており、下側ガイド(8)は、その先端部(8a)を上側ガイド板(7)の先端部(7a)より前方内側に位置させて垂下状態で屈曲させてなるとともに、その入口側後端部(8b)が軸(9)によりカバー(5)に枢着されて、出口側先端部(8a)が下方に傾動自在に取り付けられている。
【0018】
前記上側ガイド板(7)と下側ガイド(8)とは、数枚の紙類が重ね状態で挿入可能な挿入通路(10)を形成するような間隔(a)で平行に配置され、この間隔(a)を維持するように、下側ガイド(8)が板バネ(11)により上方に付勢されており、前記投入口(6)から挿入通路(10)の間隔(a)以上の人の手や厚紙等が挿入されたとき、下側ガイド(8)が板バネ(11)の付勢力に抗して下方に傾動し、この傾動による下側ガイド(8)の移動をリミットスイッチからなる厚物センサ(12)で検知するようになっている。また、上側ガイド板(7)の先端部(7a)は、下側ガイド(8)の先端部(8a)と対面するように屈曲し、挿入通路(10)から人の手や硬い物等が挿入されたとき、その挿入を抑止するようになっている。
【0019】
前記上面カバー(5)における投入口(6)の下部には、細断部となる一対の細断ローラ(13)(13)が噛合せ配置され、これら細断ローラ(13)(13)間の上部には、前記投入口(6)から挿入通路(10)を経て、被細断物(A)が投入されるようになっている。前記細断ローラ(13)(13)は、上面カバー(5)の下部に隣接させて配置された正逆転可能なモータ(14)に連動し、このモータ(14)の正転駆動により、被細断物(A)の細断駆動が行われるようになっている。
【0020】
前記ケース本体(2)内の下部収納空間(2b)には、前面の開口部(15)から前記細断部で細断した細断屑を収容するゴミ箱(B)が出し入れ可能に装填収納されるようになっている。そして、前記下部収納空間(2b)の内底面には、リミットスイッチからなる第1の重量センサ(16)とリミットスイッチからなる第2の重量センサ(17)とが設置されており、第1の重量センサ(16)は、前記ゴミ箱(B)の空箱状態における重さを検出して、ゴミ箱(B)の有無を検知するゴミ箱検知センサとし、第2の重量センサ(17)は、前記ゴミ箱(B)内における細断屑の満杯時の重さを検出するゴミ箱満杯検知センサとしてなるもので、これにより、前記ゴミ箱(B)の非装填状態及び細断屑満杯状態を、ゴミ箱装填状況として2段階的に検知するゴミ箱装填状況検知手を構成している。
【0021】
また、前記ケース本体(2)の前面には、扉(18)が開閉自在に設けられており、この扉(18)の開閉状態は、ケース本体(2)の扉ヒンジ部(18a)近傍に設けたリミットスイッチからなる扉開検知センサ(19)により検出されるようになっている。
【0022】
ところで、前記操作パネル(4)上には、図1に示すように、スタート/リスタート釦(20)、リバース釦(21)、ストップ釦(22)等のボタンスイッチ類(23)や、電源、運転停止中、厚物有り、ゴミ箱満杯、扉開・ゴミ箱なし、モータ過熱等を表示するLED表示ランプ群(24)が設けられている。これらのボタンスイッチ類(23)や、上述したゴミ箱検知センサ(16)、扉開検知センサ(19)は、図3に示すように、前記上面カバー(5)の投入口(6)に設けられる被細断物(A)の挿入及び幅を見地する用紙センサ(25)、その他のセンサ(26)等と共にマイコン(マイクロコンピュータシステムの略称である)からなるコントローラ(27)に接続され、このコントローラ(27)により、表示ドライバ(28)を介してLED表示ランプ群(24)を点灯表示し、また、モータドライバ(29)を介してモータ(14)を駆動制御している。
【0023】
次に、前記ゴミ箱(B)の有無検知手段及び扉の開閉検知手段による駆動部の制御状態を図4に基づいて説明する。なお、スタートモードとしては、オートモードと手動モードとに選択的に切換え可能になっており、本実施形態においては、オートモードを例に説明する。
【0024】
まず、ステップ(以下、STと略記する)1において、被細断物(A)が上面カバー(5)の投入口(6)に投入されると、用紙センサ(25)により被細断物(A)の検知が行われる。ここで、被細断物(A)が投入口(6)に挿入可能な所定の幅寸法以下の場合には、用紙センサ(25)がON(検出)し、ST2でモータ(14)が正転駆動し、ST3に移行する。ST1において、用紙センサ(25)がOFF(非検出)の場合には、元に戻る。
【0025】
ST3では、安全検出用の全てのセンサ条件が検知され、安全検出用の全てのセンサがOFF(非検出)の場合には、モータ(14)の正転駆動による細断ローラ(13)(13)の駆動で、被細断物(A)の細断が行われる(ST4)。この状態で、用紙センサ(25)がOFFになり、被細断物(A)の投入終了が判断されると(ST5)、5秒後にモータ(14)の運転が停止され(ST6)、細断を終了し、オートスタートの待機状態に戻る。また、ST5において、用紙センサ(25)がON状態を続行している場合には、ST2に戻り、用紙センサ(25)がOFFになるまで、被細断物(A)の細断が行われる。
【0026】
ST3において、安全検出用の全てのセンサのいずれか一つがONの場合には、ST7に移行し、その安全検出用のセンサの1っとして、本実施形態でのゴミ箱(B)の装填状態の有無が判断される。
【0027】
ST7において、ゴミ箱検知センサ(16)がON(無しを検出)の場合には、ゴミ箱(B)がケース本体(2)内の収納空間(2b)に装填されていないと判断して、モータ(14)の運転を停止し(ST8)、扉(18)を開扉して、ケース本体(2)内の収納空間(2b)へのゴミ箱(B)の装填が行われる(ST9)。このとき、扉(18)の開扉で、扉開検知センサ(19)がON(開を検出)になり、ゴミ箱検知センサ(16)のONと共にモータ(14)の運転を停止するようになっている。
【0028】
ST9において、ゴミ箱(B)の装填が終了し、ゴミ箱検知センサ(16)がOFF(無しを非検出)なると(ST10)、扉(18)を閉扉して、扉開検知センサ(19)のOFF(開を非検出)後、リセット釦(図示せず)をON(押圧操作)にし(ST11)、オートスタートの待機状態に戻り、スタート/リスタート釦(20)の押釦により、被細断物(A)の細断を開始する。また、ST10で、ゴミ箱検知センサ(16)がON状態のままであると、ゴミ箱(B)の装填が不完全であると判断され、ST9に戻り、ゴミ箱検知センサ(16)がOFFになるまで、ゴミ箱(B)の装填のやり直しが繰り返し行われる。
【0029】
ST7において、ゴミ箱(B)が正常に装填されて、ゴミ箱検知センサ(16)がOFF状態を維持しているとき、ゴミ箱(B)内における細断屑の満杯状態の判断が行われる(ST12)。
【0030】
ST12において、ゴミ箱満杯検知センサ(17)がON(満杯を検出)になると、ゴミ箱(B)内が細断屑で満杯であると判断して、モータ(14)の運転を停止し(ST13)、扉(18)を開扉して、ケース本体(2)内の収納空間(2b)からゴミ箱(B)を取り出し、細断屑を排除後、再びゴミ箱(B)の装填が行われる(ST14)。
【0031】
この際に、満杯時の重量設定が重すぎると、非力者ではゴミ箱(B)を取り出して、細断屑を排除する処理が困難となる場合を生じる。そのため、満杯の状況は、ゴミ箱(B)内の細断屑の嵩ではなく、重量とした方が、利用者それぞれ利用状況に適合する。例えば、処理する紙の質がアート紙と事務用コピー普通紙とでは、同じ嵩でも重量が大幅に異なり、紙質は、利用者や会社においては部署によって異なることが多い。
【0032】
そこで、ゴミ箱満杯検知センサ(17)を、体重計等に使用されているディジタル秤センサとして、ケース本体(2)内の収納空間(2b)におけるゴミ箱(B)の重量を、連続的(100g〜100kg)に量り、その重量値をコントローラ(27)において、数値処理して、ゴミ箱検知センサ(16)の検知状態と、ゴミ箱満杯検知センサ(17)の検知状態と同じ信号を生成して、図4のフローチャートに適合させる。
この際、ゴミ箱満杯検知センサ(17)の満杯値を、操作パネル(4)において設定できるようにしてもよく、メンテナンス設定の初期値として設定できるようにしてもよい。
【0033】
ST14において、ゴミ箱(B)の装填が終了し、ゴミ箱満杯検知センサ(17)がOFFなると(ST15)、扉(18)を閉扉して、扉開検知センサ(19)のOFF後、ST11に移行し、リセット釦(図示せず)をONにして、オートスタートの待機状態に戻る。
【0034】
ST12において、ゴミ箱満杯検知センサ(17)がOFF状態で、ゴミ箱(B)内における細断屑の蓄積に余裕がある場合には、安全検知用のその他のルーチンへ移行し(ST16)、安全検知用の他のセンサ条件が正常であると判断された場合に、オートスタートの待機状態に戻る。
【図面の簡単な説明】
【0035】
【図1】本発明のシュレッダの一実施形態における扉開状態を示す斜視図である。
【図2】縦断側面図である。
【図3】各検知手段による表示系及び駆動系の制御ブロック図である。
【図4】ゴミ箱の有無検知手段及び扉の開閉検知手段による駆動部の制御状態を示すフローチャートである。
【符号の説明】
【0036】
(1) シュレッダ
(2) ケース本体
(2a) 上部収納空間
(2b) 下部収納空間(収納部)
(3) 細断ユニット
(4) 操作パネル
(5) 上面カバー
(6) 投入口
(7) 上側ガイド板
(7a) 先端部
(8) 下側ガイド板
(8a) 先端部
(8b) 後端部
(9) 軸
(10) 挿入通路
(11) 板バネ
(12) 厚物センサ
(13) 細断ローラ(細断部)
(14) モータ(駆動部)
(15) 開口部
(16) 第1の重量センサ(ゴミ箱検知センサ)
(17) 第2の重量センサ(ゴミ箱満杯検知センサ)
(18) 扉
(18a) 扉ヒンジ部
(19) 扉開検知センサ
(20) スタート/リスタート釦
(21) リバース釦
(22) ストップ釦
(23) ボタンスイッチ類
(24) LED表示ランプ群
(25) 用紙センサ
(26) その他のセンサ
(27) コントローラ
(28) 表示ドライバ
(29) モータドライバ
(A) 被細断物
(B) ゴミ箱
(a) 間隔
【特許請求の範囲】
【請求項1】
ケース本体内の上部に、投入口から投入された紙・書類等の被細断物を駆動部により細断駆動する細断部を設け、前記ケース本体内の下部に、前記細断部で細断した細断屑を収容するゴミ箱が装填収納される収納部を設け、前記ケース本体の外周面に、少なくとも前記収納部の前方側を開放して、前記ゴミ箱の出し入れ可能にする開口部を設けるとともに、該開口部に扉を開閉自在に設けたシュレッダにおいて、
前記収納部内に、ゴミ箱の有無もしくはゴミ箱内の細断屑の溜まり具合のいずれか又は両方を検知するゴミ箱装填状況検知手段を設け、該検知手段の作動により、前記駆動部の動作を規制することを特徴とするシュレッダ。
【請求項2】
前記ゴミ箱装填状況検知手段は、前記ゴミ箱の空箱状態を、ゴミ箱の有無をもって検出する第1の重量センサである請求項1記載のシュレッダ。
【請求項3】
前記ゴミ箱装填状況検知手段は、前記ゴミ箱の細断屑満杯状態を、細断屑を溜たゴミ箱の重さを検出する第2の重量センサである請求項1記載のシュレッダ。
【請求項4】
前記ゴミ箱装填状況検知手段は、ゴミ箱の空箱状態からゴミ箱の細断屑満杯状態までの重さを、連続的に検出するディジタル秤センサである請求項1〜3いずれかに記載のシュレッダ。
【請求項1】
ケース本体内の上部に、投入口から投入された紙・書類等の被細断物を駆動部により細断駆動する細断部を設け、前記ケース本体内の下部に、前記細断部で細断した細断屑を収容するゴミ箱が装填収納される収納部を設け、前記ケース本体の外周面に、少なくとも前記収納部の前方側を開放して、前記ゴミ箱の出し入れ可能にする開口部を設けるとともに、該開口部に扉を開閉自在に設けたシュレッダにおいて、
前記収納部内に、ゴミ箱の有無もしくはゴミ箱内の細断屑の溜まり具合のいずれか又は両方を検知するゴミ箱装填状況検知手段を設け、該検知手段の作動により、前記駆動部の動作を規制することを特徴とするシュレッダ。
【請求項2】
前記ゴミ箱装填状況検知手段は、前記ゴミ箱の空箱状態を、ゴミ箱の有無をもって検出する第1の重量センサである請求項1記載のシュレッダ。
【請求項3】
前記ゴミ箱装填状況検知手段は、前記ゴミ箱の細断屑満杯状態を、細断屑を溜たゴミ箱の重さを検出する第2の重量センサである請求項1記載のシュレッダ。
【請求項4】
前記ゴミ箱装填状況検知手段は、ゴミ箱の空箱状態からゴミ箱の細断屑満杯状態までの重さを、連続的に検出するディジタル秤センサである請求項1〜3いずれかに記載のシュレッダ。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2007−136260(P2007−136260A)
【公開日】平成19年6月7日(2007.6.7)
【国際特許分類】
【出願番号】特願2005−329339(P2005−329339)
【出願日】平成17年11月14日(2005.11.14)
【出願人】(000000561)株式会社岡村製作所 (1,415)
【Fターム(参考)】
【公開日】平成19年6月7日(2007.6.7)
【国際特許分類】
【出願日】平成17年11月14日(2005.11.14)
【出願人】(000000561)株式会社岡村製作所 (1,415)
【Fターム(参考)】
[ Back to top ]