
シリンダのストロークセンサ
【課題】シリンダにおけるピストンロッドの絶対的なストロークを検出可能なストロークセンサを提供すること。
【解決手段】
シリンダ10本体であるシリンダチューブ20と、シリンダチューブ20に対して進退自在に設けられるピストンロッド30と、を備えるシリンダ10のストロークセンサ100であって、ピストンロッド30は、ストロークに伴って円周上の位置が異なるように軸方向に形成される磁気スケール60を備え、シリンダチューブ20は、ピストンロッド30の周囲を囲むように略等間隔で設けられ磁気スケール60を検出可能な複数のMR素子50a〜50fを同一円周上に備える。
【解決手段】
シリンダ10本体であるシリンダチューブ20と、シリンダチューブ20に対して進退自在に設けられるピストンロッド30と、を備えるシリンダ10のストロークセンサ100であって、ピストンロッド30は、ストロークに伴って円周上の位置が異なるように軸方向に形成される磁気スケール60を備え、シリンダチューブ20は、ピストンロッド30の周囲を囲むように略等間隔で設けられ磁気スケール60を検出可能な複数のMR素子50a〜50fを同一円周上に備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、シリンダに用いられるストロークセンサに関するものである。
【背景技術】
【0002】
従来より、シリンダのストロークを検出するためにストロークセンサが用いられている。ストロークセンサは、シリンダの本体であるシリンダチューブに設けられた検出素子が、シリンダチューブに対して進退自在なピストンロッドに設けられたスケールの位置を検出することによってシリンダのストローク量を検出可能にしている。
【0003】
特許文献1には、ピストンロッドの軸方向に所定の間隔をあけて連続するように磁気スケールを形成し、磁気スケールの位置を検出センサで検出することによってピストンロッドのストロークを検出する磁気式ストローク検出センサが開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平7−128006号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1のストローク検出センサでは、基準となる位置からのピストンロッドの相対的なストロークを検出することはできるが、ピストンロッドの絶対的なストロークを検出することができない。
【0006】
そこで、本発明ではシリンダにおけるピストンロッドの絶対的なストロークを検出可能なストロークセンサを得ることを目的とする。
【課題を解決するための手段】
【0007】
本発明は、シリンダ本体であるシリンダチューブと、前記シリンダチューブに対して進退自在に設けられるピストンロッドと、を備えるシリンダのストロークセンサであって、前記ピストンロッドは、ストロークに伴って円周上の位置が異なるように軸方向に形成されるスケールを備え、前記シリンダチューブは、前記ピストンロッドの周囲を囲むように等間隔で設けられ前記スケールを検出可能な複数の検出素子を同一円周上に備えることを特徴とする。
【発明の効果】
【0008】
本発明では、ピストンロッドのストロークによってスケールが位置している検出素子が異なる。円周上のどの位置の検出素子がスケールを検出したかによってピストンロッドのストロークが分かる。
【0009】
したがって、シリンダにおけるピストンロッドの絶対的なストロークを検出可能なストロークセンサを得ることができる。
【図面の簡単な説明】
【0010】
【図1】本発明の第1の実施の形態に係るストロークセンサの構成図である。
【図2】ストロークセンサのピストンロッドの展開図である。
【図3】ストロークセンサの出力信号のグラフ図である。
【図4】本発明の第2の実施の形態に係るストロークセンサにおけるピストンロッドの正面図である。
【図5】本発明の第3の実施の形態に係るストロークセンサにおけるピストンロッドの正面図である。
【発明を実施するための形態】
【0011】
(第1の実施の形態)
以下、図面を参照しながら本発明の第1の実施の形態に係るストロークセンサ100について説明する。
【0012】
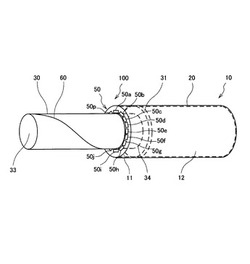
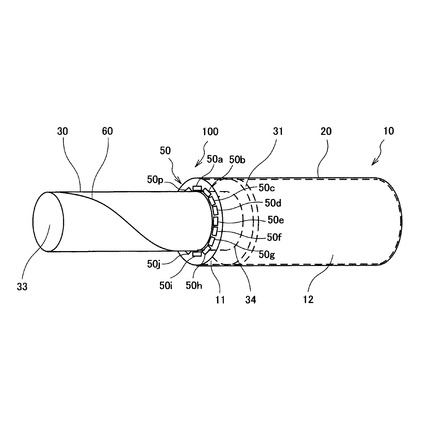
まず、図1を参照しながらストロークセンサ100が設けられるシリンダ10について説明する。本実施形態では、流体圧として油圧が用いられ、シリンダ10は油圧ポンプ(図示省略)から吐出される作動油によって動作する油圧シリンダである。
【0013】
シリンダ10は、シリンダ10の本体であるシリンダチューブ20と、シリンダチューブ20に対して進退自在に設けられるピストンロッド30とを備える。
【0014】
シリンダチューブ20は円筒形であり、シリンダチューブ20の内部には軸方向に摺動自在にピストン31が設けられる。このピストン31によって、シリンダチューブ20の内部には二つの油室11,12が画成される。
【0015】
二つの油室11,12はそれぞれ切替バルブ(図示省略)に接続され、二つの油室11,12には油圧ポンプから吐出された作動油が出入り可能である。シリンダ10は複動式のシリンダであるが、単動式であってもよい。
【0016】
ピストンロッド30は、最後端34がピストン31に固定される円柱形の磁性体である。ピストンロッド30は、ピストン31に作用する油圧による力で動作する。
【0017】
次に、シリンダ10に設けられるストロークセンサ100について説明する。
【0018】
ストロークセンサ100は、シリンダチューブ20に配設されるMRセンサ50と、ピストンロッド30に形成されるスケールとしての磁気スケール60とを備える。ストロークセンサ100は、シリンダチューブ20に対するピストンロッド30のストロークを検出するために設けられる。
【0019】
シリンダチューブ20の端部内周には、ピストンロッド30の外周を取り囲むようにMR(Magneto−Resistive:磁気抵抗)センサ50及び磁気発生源である永久磁石(図示省略)が配設される。MRセンサ50の代わりに、より感度のよいGMR(Giant Magneto−Resistive:巨大磁気抵抗)センサや、MI(Magneto−Impedance:磁気インピーダンス)効果を利用したMIセンサなどを使用してもよい。
【0020】
MRセンサ50は、磁気の強弱によって電気抵抗が変化するMR素子50a〜50pによって形成される。MR素子50a〜50pは、互いに所定の間隔を開けて等ピッチに、かつピストンロッド30の外周に沿って同一円周上に環状に設けられる。各々のMR素子50a〜50pは、ピストンロッド30との間のクリアランスが同一になるように設けられ、ピストンロッド30へと作用する磁気を検出する。
【0021】
MR素子50a〜50pは、それぞれ電圧をコントローラ(図示省略)へ出力する。この電圧は、磁気による電気抵抗の変化に伴って変動する。例えばMR素子50a〜50pのいずれか一つに磁石が近付いてきて離れてゆく場合には、出力される電圧は略サイン波状に変化する。これらのMR素子50a〜50pが検出素子に該当する。
【0022】
隣接するMR素子50a〜50p同士は、ピストンロッド30周方向の検出可能範囲が互いに重複するように設けられる。即ち、MRセンサ50は、ピストンロッド30の外周一周にわたって磁気を検出可能である。
【0023】
また、隣接するMR素子50a〜50p同士の検出可能範囲を、出力されるサイン波の4分の1周期以上が重複するように並べて配置する。このように構成することで、ピストンロッド30のストロークをより精細に検出することが可能である。精細なストロークの検出については、後で詳細に説明する。
【0024】
本実施形態では、MR素子50a〜50pは16個設けられるが、この個数はMR素子50a〜50pの検出可能範囲の大きさやピストンロッド30の外径などによって適宜決定されるものである。
【0025】
永久磁石は、MR素子50a〜50pよりも外周に、MR素子50a〜50pと重ねて配設される。つまり、ピストンロッド30の外周を囲むようにMR素子50a〜50pが設けられ、更に外周に重なるように永久磁石が設けられる。永久磁石は、MR素子50a〜50p一個につき一個ずつ設けられる。ストロークセンサ100では、永久磁石から発せられた磁気がピストンロッド30へと作用するのを、MRセンサ50によって検出する。
【0026】
ピストンロッド30の外周には、軸方向に連続して同一周期の螺旋形状に形成される非磁性体である磁気スケール60が形成される。
【0027】
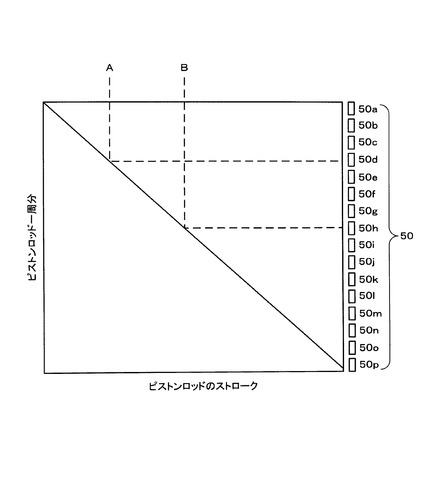
磁気スケール60は、ピストンロッド30のストローク全体でピストンロッド30の外周を一周する螺旋形状に形成される。つまり、磁気スケール60は、ストロークに伴って円周上の位置が異なるように形成される。磁気スケール60は、ピストンロッド30の自由端33から最後端34まで、長手方向全体にわたって形成される。図2に示すように、螺旋形状の磁気スケール60は、展開図で見ると直線状である。
【0028】
磁気スケール60は非磁性体によって形成される。磁性体であるピストンロッド30に磁気スケール60を形成することにより、永久磁石から発せられる磁気のピストンロッド30への作用に変化をもたせることができる。磁気スケール60を磁性体で形成しても、磁気スケール60の形状によって、MR素子50a〜50pとの間隔を変化させることで、MRセンサ50からの出力に変化をもたせることが可能である。
【0029】
以下では、ストロークセンサ100の作用について説明する。
【0030】
ここでは、ピストンロッド30が最収縮位置にある状態から伸び出す場合について説明する。伸出状態にあるピストンロッド30が収縮する場合には、以下の説明とは逆の動作になる。
【0031】
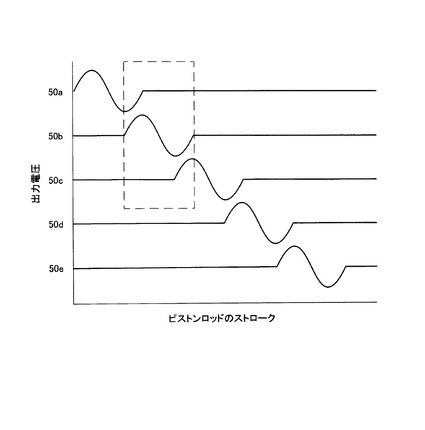
ピストン31と一体であるピストンロッド30がシリンダチューブ20から伸び出してゆくと、MRセンサ50からは、図3に示すような信号出力が得られる。図3において横軸はピストンロッド30のストロークであり、縦軸はMR素子50a〜50eから出力された電圧である。図3では、MR素子50a〜50eのそれぞれの電圧を見やすくするために、それぞれのMR素子50a〜50eの縦軸上の位置をずらして示している。また、実際にはピストンロッド30がシリンダチューブ20から進出してゆくと、やがて残りのMR素子50f〜50pからも電圧が出力されるが、MR素子50a〜50eから出力される電圧と同様であるため、図3にはMR素子50a〜50eのみについて示している。
【0032】
ピストンロッド30が最収縮位置にあるときには、ピストンロッド30の自由端33がMRセンサ50と対峙している。ピストンロッド30の自由端において、磁気スケール60はMR素子50aと対峙しているため、MR素子50aから電圧が出力される。
【0033】
ピストンロッド30が図2に示すAのストロークまで伸び出すと、MR素子50dから電圧が出力され、Bのストロークまで伸び出すと、MR素子50hから電圧が出力される。そして、ピストンロッド30が最伸出位置までストロークすると、MR素子50pから電圧が出力される。つまり、磁気スケール60を検出するMR素子50a〜50pの円周上の位置とピストンロッド30のストロークとの関係は、正比例するように変化する。
【0034】
また、ストロークセンサ100では16個のMR素子50a〜50pを使用してピストンロッド30の全ストロークを検出する。このとき、全ストロークをMR素子50a〜50pの個数で除した大きさがストロークセンサ100の分解能である。例えば、ストロークセンサ100においてピストンロッド30の全ストロークが160mmである場合には、ストロークセンサ100の分解能は、160mmを16個で除した10mmである。
【0035】
従来は、システム起動時におけるピストンロッド30の位置が原点位置であり、そこからどれだけピストンロッド30が進退したかを検出していた。つまり、ピストンロッド30の相対的なストロークを検出できても、システム起動時などにおけるピストンロッド30の絶対位置を検出することはできなかった。
【0036】
これに対してストロークセンサ100では、ピストンロッド30のストロークによって磁気スケール60を検出するMR素子50a〜50pが異なる。よって、MRセンサ50において円周上のどの位置のMR素子50a〜50pが磁気スケール60を検出したかによって、ピストンロッド30のストロークが分かる。したがって、シリンダ10におけるピストンロッド30の絶対的なストロークを検出することができる。
【0037】
ここで、ピストンロッド30が軸中心に回転したとすると、同じストロークであっても異なるMR素子50a〜50pから電圧が出力されることとなる。よって、ピストンロッド30が回転しないように拘束しておく必要がある。
【0038】
MRセンサ50では、MR素子50a〜50pの検出可能範囲が互いに重複するように配置されている。よって、MR素子50aの検出可能範囲からMRセンサ50に対する磁気スケール60の螺旋の位置が円周方向にずれてゆき、磁気スケール60が検出可能範囲から完全に外れないうちに、MR素子50aと隣接して配設されるMR素子50bの検出可能範囲に磁気スケール60が入る。このように、MRセンサ50が磁気スケール60を検出できずに信号が出力されない状態にはならず、ピストンロッド30がどのストロークであっても磁気スケール60を検出可能である。
【0039】
ところで、ストロークセンサ100の分解能は、ピストンロッド30の全ストロークと、MR素子50a〜50pの個数によって決定される。MR素子50a〜50pの個数を増やすには限界があるため、分解能を高めるためには各々のMR素子50a〜50p間の補完計算を行うことが考えられる。
【0040】
ストロークセンサ100では、図3に示すようにMRセンサ50a〜50pから出力される電圧は、略サイン波状である。また、各々のMRセンサ50a〜50pからのサイン波状の出力の略4分の1周期以上が重複するように配置している。このように構成することによって、各々のMR素子50a〜50pから出力された電圧の大きさ、及び隣接するMR素子50a〜50pから出力された電圧によって、MR素子50a〜50pに対する磁気スケール60の精細な位置を検出することが可能である。以下、図3の破線の四角形で囲まれた部分を参照しながら具体的に説明する。
【0041】
MR素子50a〜50pから出力される電圧は、ピストンロッド30のストロークに応じて略サイン波状に変動する。よって、出力された電圧の大きさを見れば、対応するピストンロッド30のストロークが分かるはずである。
【0042】
しかしながら、MR素子50bから出力された略サイン波状の電圧の最初の2分の1周期に着目すると、電圧が上昇して下降する中で、同じ大きさの電圧が上昇時と下降時の二度出力される。つまり、これだけでは上昇時の電圧と下降時の電圧とのどちらが出力されているのか判定できない。そこで、ストロークセンサ100では隣接するMR素子50a〜50pから出力される電圧を用いて判定を行う。
【0043】
図3の破線の四角形の範囲において、ピストンロッド30が伸び出してゆき、MR素子50bから電圧が検出され上昇し始めたときには、隣接するMR素子50aからの電圧が出力されてる。ピストンロッド30が更に伸び出し、MR素子50bからの電圧が下降し始めたときには、MR素子50aからの電圧は出力されなくなる。よって、隣接するMR素子50aからの電圧の出力が有るときには上昇時であり、無いときには下降時であると判定することができる。
【0044】
同様に、ピストンロッド30が更に伸び出し、MR素子50bから出力される電圧が負の値になり更に下降してゆくときには、MR素子50bのみから電圧出力が出力される。ピストンロッド30が更に伸び出し、MR素子50bから出力される電圧が下限値から再び上昇し始めると、隣接するMR素子50cからの電圧が出力される。よって、隣接するMR素子50cからの電圧の出力が無いときには下降時であり、有るときには上昇時であると判定することができる。
【0045】
以上のように、隣接するMR素子50a,50cから出力される電圧で補完することによって、MR素子50bから出力される電圧の大きさに応じたピストンロッド30のストロークを精細に検出することが可能である。
【0046】
以上の実施の形態によれば、以下に示すような効果を奏する。
【0047】
本発明では、ピストンロッド30のストロークによって磁気スケール60が対峙するMR素子50a〜50pが異なる。よって、MRセンサ50において円周上のどの位置のMR素子50a〜50pが磁気スケール60を検出したかによって、ピストンロッド30のストロークが分かる。したがって、シリンダ10におけるピストンロッド30の絶対的なストロークを検出することができる。
【0048】
また、MRセンサ50は、MR素子50a〜50pの検出可能範囲が互いに重複するように配置されている。よって、MRセンサ50が磁気スケール60を検出できずに信号が出力されない状態にはならず、ピストンロッド30がどのストロークであっても検出可能である。
【0049】
また、各々のMRセンサ50a〜50pからのサイン波状の出力の略4分の1周期以上が重複するように配置することによって、各々のMR素子50a〜50pから出力された電圧の大きさ、及び隣接するMR素子50a〜50pから出力された電圧によって、ピストンロッド30の精細なストロークを検出することが可能である。
(第2の実施の形態)
以下、図4を参照しながら本発明の第2の実施の形態について説明する。なお、以下に示す各実施形態では前述した実施形態と同様の構成には同一の符号を付し、重複する説明は適宜省略する。
【0050】
第2の実施の形態では、ピストンロッド230に形成される磁気スケール260の形状が第1の実施の形態とは相違する。この磁気スケール260は、長尺のピストンロッドを使用する場合や、精細な分解能が要求される場合などに適用される。
【0051】
精細な分解能が要求される場合には、第1の実施の形態における螺旋状の非磁性体である磁気スケール60を、より短いストロークに適用する必要がある。ピストンロッドの全ストロークをMR素子50a〜50bの個数で除した大きさがストロークセンサの分解能であるためである。そこで、ピストンロッド230には、磁気スケール60と同様の螺旋形状を短いストロークに適用し、同一周期の螺旋のみではなく複数の周期の螺旋によって構成される磁気スケール260を形成する。
【0052】
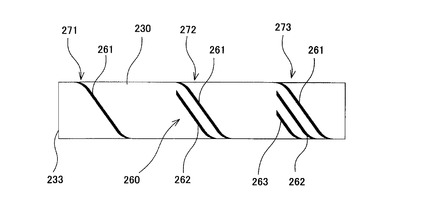
しかしながら、磁気スケール60が連続して形成されて螺旋の二周期目に入ると、円周上の位置が一周期目の螺旋と同一の箇所が形成されてしまう。そのため、ピストンロッド230には、多条の螺旋261〜263を備える磁気スケール260が形成される。
【0053】
磁気スケール260は、ピストンロッド230の表面に形成される三本の螺旋状の非磁性体によって構成される。磁気スケール260は、ピストンロッド230の自由端233から最後端234まで、長手方向全体にわたって形成される。
【0054】
第1の螺旋261は、ピストンロッド230の自由端233から形成される。第1の螺旋261は、ピストンロッド230のストローク全体に三周期分形成される。第1の螺旋261が単独で形成されるエリアを、一条エリア271とする。
【0055】
第1の螺旋261の二周期目からは、第1の螺旋261と所定の間隔をあけて並行するように第2の螺旋262が二周期分だけ形成される。第1の螺旋261と第2の螺旋262のみが形成されるエリアを、二条エリア272とする。
【0056】
第1の螺旋261の三周期目からは、第2の螺旋262と所定の間隔をあけて並行するように、第3の螺旋263が一周期分だけ形成される。第1の螺旋261,第2の螺旋262,及び第3の螺旋262が形成されるエリアを、三条エリア273とする。
【0057】
以下では、ピストンロッド230が最収縮位置にある状態から伸び出す場合について説明する。ここでは、各々の螺旋261〜263間の所定の間隔は、MR素子50a〜50pの配設されるピッチと同一であるとする。
【0058】
ピストンロッド230が伸び出すと、まず一条エリア271がMRセンサ50によって検出される。一条エリア271では、第1の実施の形態と同様にMRセンサ50を構成するMR素子50a〜50pのいずれか一つから電圧が出力され、ピストンロッド230のストロークが検出できる。
【0059】
ピストンロッド230が更に伸び出すと、二条エリア272がMRセンサ50によって検出される。ここで、第1の螺旋261の円周上の位置のみに着目すると、一条エリア271にも円周上の同一の位置に第1の螺旋261が形成されているストロークが存在する。よって、一条エリア271なのか二条エリア272なのかが分からない。
【0060】
しかしながら、二条エリア272では第1の螺旋261と並行して第2の螺旋262が形成されている。よって、MRセンサ50におけるMR素子50a〜50pのうち隣接する二つから電圧が出力されるため、二条エリア272であることが分かる。
【0061】
同様に、ピストンロッド230が更に伸び出して、三条エリア273がMRセンサ50によって検出されたときには、MRセンサ50におけるMR素子50a〜50pのうち隣接する三つから電圧が出力されるため、三条エリア273であることが分かる。
【0062】
したがって、磁気スケール260を形成することによって絶対的なストロークが検出可能である。このように、二重及び三重の螺旋を形成する他にも、二周期目及び三周期目の螺旋の太さを変えて非磁性体を形成することなども可能である。例えば、二周期目の螺旋をMRセンサ50a〜50pのうち隣接する二つで検出可能な太さで形成し、三周期目の螺旋を隣接する三つで検出可能な太さで形成すれば同様の効果が得られるためである。
【0063】
以上の実施の形態によれば、二重,三重の螺旋261〜263を形成することによって、螺旋一周期分に相当するピストンロッド230のストロークが短くなる。よって、精細な分解能が要求される場合にも適用することができる。また、多条螺旋を形成することによって螺旋を何周期にもわたって連続して形成することができる。よって、長尺のピストンロッドを使用する場合にも適用することができる。
(第3の実施の形態)
以下、図5を参照しながら本発明の第3の実施の形態について説明する。
【0064】
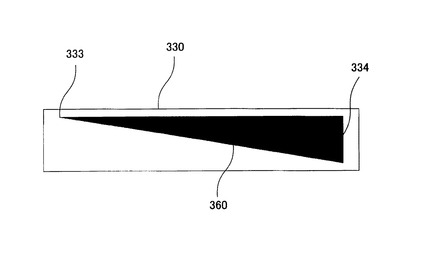
第3の実施の形態では、ピストンロッド330に形成される磁気スケール360の形状がこれまでの実施の形態とは相違する。この磁気スケール360は、シリンダチューブ20に対してピストンロッド330が回転した場合にも、ピストンロッド330の絶対的なストロークを検出可能な形状に形成される。
【0065】
磁気スケール360は、ピストンロッド330の最先端部333から最後端部334まで、ストローク全体にわたってピストンロッド330の表面に形成される三角形の面状の非磁性体によって構成される。磁気スケール360は、ピストンロッド330の最先端部333に三角形の頂点が位置し、ストロークに対して比例的に幅が大きくなり、最後端部334に三角形の底辺が位置するように形成される。磁気スケール360は直角三角形であるが、例えば、直角三角形でなくても最先端部333に頂点が位置し最後端部334に底辺が位置する三角形であればよい。
【0066】
以下では、ピストンロッド330が最収縮位置にある状態から伸び出す場合について説明する。
【0067】
ピストンロッド330が伸び出すと、まずMR素子50a〜50pのうち一つのMR素子50aが磁気スケール360を検出して電圧を出力する。ピストンロッド330が更に伸び出すと、隣接するMR素子50bも磁気スケール360を検出し、二つのMR素子50a,50bから電圧が出力される。このように、ピストンロッド330が伸び出すにつれてMR素子50a〜50pのうち磁気スケール360を検出する素子の数が徐々に増えてゆく。これにより、MRセンサ50の出力からピストンロッド330の絶対的なストロークを検出することが可能である。
【0068】
ここで、ピストンロッド330が同一のストロークを維持したまま軸中心に回転したとすると、二つのMR素子50a,50bから出力されていた電圧が、例えばMR素子50c,50dから出力されるようになる。このように、電圧を出力するMR素子50a〜50bは異なっても、電圧を出力するMR素子50a〜50pの個数は変化しない。よって、ピストンロッド330が軸中心に回転したとしても、ピストンロッド330のストロークを検出することができる。
【0069】
以上の実施の形態では、ピストンロッド330に形成される磁気スケール360を、略三角形の非磁性体で構成している。よって、磁気スケール360を検出するMR素子50a〜50pの個数によって、ピストンロッド330がシリンダチューブ20に対して回転した場合にも、ピストンロッド330の絶対的なストロークを検出可能である。
【0070】
本発明は上記の実施の形態に限定されずに、その技術的な思想の範囲内において種々の変更がなしうることは明白である。
【産業上の利用可能性】
【0071】
本発明に係るストロークセンサは、シリンダなど直動部品のストロークを検出するセンサとして利用できる。
【符号の説明】
【0072】
100 ストロークセンサ
10 シリンダ
20 シリンダチューブ
30 ピストンロッド
50 MRセンサ
50a〜50p MR素子
60 磁気スケール
【技術分野】
【0001】
本発明は、シリンダに用いられるストロークセンサに関するものである。
【背景技術】
【0002】
従来より、シリンダのストロークを検出するためにストロークセンサが用いられている。ストロークセンサは、シリンダの本体であるシリンダチューブに設けられた検出素子が、シリンダチューブに対して進退自在なピストンロッドに設けられたスケールの位置を検出することによってシリンダのストローク量を検出可能にしている。
【0003】
特許文献1には、ピストンロッドの軸方向に所定の間隔をあけて連続するように磁気スケールを形成し、磁気スケールの位置を検出センサで検出することによってピストンロッドのストロークを検出する磁気式ストローク検出センサが開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平7−128006号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1のストローク検出センサでは、基準となる位置からのピストンロッドの相対的なストロークを検出することはできるが、ピストンロッドの絶対的なストロークを検出することができない。
【0006】
そこで、本発明ではシリンダにおけるピストンロッドの絶対的なストロークを検出可能なストロークセンサを得ることを目的とする。
【課題を解決するための手段】
【0007】
本発明は、シリンダ本体であるシリンダチューブと、前記シリンダチューブに対して進退自在に設けられるピストンロッドと、を備えるシリンダのストロークセンサであって、前記ピストンロッドは、ストロークに伴って円周上の位置が異なるように軸方向に形成されるスケールを備え、前記シリンダチューブは、前記ピストンロッドの周囲を囲むように等間隔で設けられ前記スケールを検出可能な複数の検出素子を同一円周上に備えることを特徴とする。
【発明の効果】
【0008】
本発明では、ピストンロッドのストロークによってスケールが位置している検出素子が異なる。円周上のどの位置の検出素子がスケールを検出したかによってピストンロッドのストロークが分かる。
【0009】
したがって、シリンダにおけるピストンロッドの絶対的なストロークを検出可能なストロークセンサを得ることができる。
【図面の簡単な説明】
【0010】
【図1】本発明の第1の実施の形態に係るストロークセンサの構成図である。
【図2】ストロークセンサのピストンロッドの展開図である。
【図3】ストロークセンサの出力信号のグラフ図である。
【図4】本発明の第2の実施の形態に係るストロークセンサにおけるピストンロッドの正面図である。
【図5】本発明の第3の実施の形態に係るストロークセンサにおけるピストンロッドの正面図である。
【発明を実施するための形態】
【0011】
(第1の実施の形態)
以下、図面を参照しながら本発明の第1の実施の形態に係るストロークセンサ100について説明する。
【0012】
まず、図1を参照しながらストロークセンサ100が設けられるシリンダ10について説明する。本実施形態では、流体圧として油圧が用いられ、シリンダ10は油圧ポンプ(図示省略)から吐出される作動油によって動作する油圧シリンダである。
【0013】
シリンダ10は、シリンダ10の本体であるシリンダチューブ20と、シリンダチューブ20に対して進退自在に設けられるピストンロッド30とを備える。
【0014】
シリンダチューブ20は円筒形であり、シリンダチューブ20の内部には軸方向に摺動自在にピストン31が設けられる。このピストン31によって、シリンダチューブ20の内部には二つの油室11,12が画成される。
【0015】
二つの油室11,12はそれぞれ切替バルブ(図示省略)に接続され、二つの油室11,12には油圧ポンプから吐出された作動油が出入り可能である。シリンダ10は複動式のシリンダであるが、単動式であってもよい。
【0016】
ピストンロッド30は、最後端34がピストン31に固定される円柱形の磁性体である。ピストンロッド30は、ピストン31に作用する油圧による力で動作する。
【0017】
次に、シリンダ10に設けられるストロークセンサ100について説明する。
【0018】
ストロークセンサ100は、シリンダチューブ20に配設されるMRセンサ50と、ピストンロッド30に形成されるスケールとしての磁気スケール60とを備える。ストロークセンサ100は、シリンダチューブ20に対するピストンロッド30のストロークを検出するために設けられる。
【0019】
シリンダチューブ20の端部内周には、ピストンロッド30の外周を取り囲むようにMR(Magneto−Resistive:磁気抵抗)センサ50及び磁気発生源である永久磁石(図示省略)が配設される。MRセンサ50の代わりに、より感度のよいGMR(Giant Magneto−Resistive:巨大磁気抵抗)センサや、MI(Magneto−Impedance:磁気インピーダンス)効果を利用したMIセンサなどを使用してもよい。
【0020】
MRセンサ50は、磁気の強弱によって電気抵抗が変化するMR素子50a〜50pによって形成される。MR素子50a〜50pは、互いに所定の間隔を開けて等ピッチに、かつピストンロッド30の外周に沿って同一円周上に環状に設けられる。各々のMR素子50a〜50pは、ピストンロッド30との間のクリアランスが同一になるように設けられ、ピストンロッド30へと作用する磁気を検出する。
【0021】
MR素子50a〜50pは、それぞれ電圧をコントローラ(図示省略)へ出力する。この電圧は、磁気による電気抵抗の変化に伴って変動する。例えばMR素子50a〜50pのいずれか一つに磁石が近付いてきて離れてゆく場合には、出力される電圧は略サイン波状に変化する。これらのMR素子50a〜50pが検出素子に該当する。
【0022】
隣接するMR素子50a〜50p同士は、ピストンロッド30周方向の検出可能範囲が互いに重複するように設けられる。即ち、MRセンサ50は、ピストンロッド30の外周一周にわたって磁気を検出可能である。
【0023】
また、隣接するMR素子50a〜50p同士の検出可能範囲を、出力されるサイン波の4分の1周期以上が重複するように並べて配置する。このように構成することで、ピストンロッド30のストロークをより精細に検出することが可能である。精細なストロークの検出については、後で詳細に説明する。
【0024】
本実施形態では、MR素子50a〜50pは16個設けられるが、この個数はMR素子50a〜50pの検出可能範囲の大きさやピストンロッド30の外径などによって適宜決定されるものである。
【0025】
永久磁石は、MR素子50a〜50pよりも外周に、MR素子50a〜50pと重ねて配設される。つまり、ピストンロッド30の外周を囲むようにMR素子50a〜50pが設けられ、更に外周に重なるように永久磁石が設けられる。永久磁石は、MR素子50a〜50p一個につき一個ずつ設けられる。ストロークセンサ100では、永久磁石から発せられた磁気がピストンロッド30へと作用するのを、MRセンサ50によって検出する。
【0026】
ピストンロッド30の外周には、軸方向に連続して同一周期の螺旋形状に形成される非磁性体である磁気スケール60が形成される。
【0027】
磁気スケール60は、ピストンロッド30のストローク全体でピストンロッド30の外周を一周する螺旋形状に形成される。つまり、磁気スケール60は、ストロークに伴って円周上の位置が異なるように形成される。磁気スケール60は、ピストンロッド30の自由端33から最後端34まで、長手方向全体にわたって形成される。図2に示すように、螺旋形状の磁気スケール60は、展開図で見ると直線状である。
【0028】
磁気スケール60は非磁性体によって形成される。磁性体であるピストンロッド30に磁気スケール60を形成することにより、永久磁石から発せられる磁気のピストンロッド30への作用に変化をもたせることができる。磁気スケール60を磁性体で形成しても、磁気スケール60の形状によって、MR素子50a〜50pとの間隔を変化させることで、MRセンサ50からの出力に変化をもたせることが可能である。
【0029】
以下では、ストロークセンサ100の作用について説明する。
【0030】
ここでは、ピストンロッド30が最収縮位置にある状態から伸び出す場合について説明する。伸出状態にあるピストンロッド30が収縮する場合には、以下の説明とは逆の動作になる。
【0031】
ピストン31と一体であるピストンロッド30がシリンダチューブ20から伸び出してゆくと、MRセンサ50からは、図3に示すような信号出力が得られる。図3において横軸はピストンロッド30のストロークであり、縦軸はMR素子50a〜50eから出力された電圧である。図3では、MR素子50a〜50eのそれぞれの電圧を見やすくするために、それぞれのMR素子50a〜50eの縦軸上の位置をずらして示している。また、実際にはピストンロッド30がシリンダチューブ20から進出してゆくと、やがて残りのMR素子50f〜50pからも電圧が出力されるが、MR素子50a〜50eから出力される電圧と同様であるため、図3にはMR素子50a〜50eのみについて示している。
【0032】
ピストンロッド30が最収縮位置にあるときには、ピストンロッド30の自由端33がMRセンサ50と対峙している。ピストンロッド30の自由端において、磁気スケール60はMR素子50aと対峙しているため、MR素子50aから電圧が出力される。
【0033】
ピストンロッド30が図2に示すAのストロークまで伸び出すと、MR素子50dから電圧が出力され、Bのストロークまで伸び出すと、MR素子50hから電圧が出力される。そして、ピストンロッド30が最伸出位置までストロークすると、MR素子50pから電圧が出力される。つまり、磁気スケール60を検出するMR素子50a〜50pの円周上の位置とピストンロッド30のストロークとの関係は、正比例するように変化する。
【0034】
また、ストロークセンサ100では16個のMR素子50a〜50pを使用してピストンロッド30の全ストロークを検出する。このとき、全ストロークをMR素子50a〜50pの個数で除した大きさがストロークセンサ100の分解能である。例えば、ストロークセンサ100においてピストンロッド30の全ストロークが160mmである場合には、ストロークセンサ100の分解能は、160mmを16個で除した10mmである。
【0035】
従来は、システム起動時におけるピストンロッド30の位置が原点位置であり、そこからどれだけピストンロッド30が進退したかを検出していた。つまり、ピストンロッド30の相対的なストロークを検出できても、システム起動時などにおけるピストンロッド30の絶対位置を検出することはできなかった。
【0036】
これに対してストロークセンサ100では、ピストンロッド30のストロークによって磁気スケール60を検出するMR素子50a〜50pが異なる。よって、MRセンサ50において円周上のどの位置のMR素子50a〜50pが磁気スケール60を検出したかによって、ピストンロッド30のストロークが分かる。したがって、シリンダ10におけるピストンロッド30の絶対的なストロークを検出することができる。
【0037】
ここで、ピストンロッド30が軸中心に回転したとすると、同じストロークであっても異なるMR素子50a〜50pから電圧が出力されることとなる。よって、ピストンロッド30が回転しないように拘束しておく必要がある。
【0038】
MRセンサ50では、MR素子50a〜50pの検出可能範囲が互いに重複するように配置されている。よって、MR素子50aの検出可能範囲からMRセンサ50に対する磁気スケール60の螺旋の位置が円周方向にずれてゆき、磁気スケール60が検出可能範囲から完全に外れないうちに、MR素子50aと隣接して配設されるMR素子50bの検出可能範囲に磁気スケール60が入る。このように、MRセンサ50が磁気スケール60を検出できずに信号が出力されない状態にはならず、ピストンロッド30がどのストロークであっても磁気スケール60を検出可能である。
【0039】
ところで、ストロークセンサ100の分解能は、ピストンロッド30の全ストロークと、MR素子50a〜50pの個数によって決定される。MR素子50a〜50pの個数を増やすには限界があるため、分解能を高めるためには各々のMR素子50a〜50p間の補完計算を行うことが考えられる。
【0040】
ストロークセンサ100では、図3に示すようにMRセンサ50a〜50pから出力される電圧は、略サイン波状である。また、各々のMRセンサ50a〜50pからのサイン波状の出力の略4分の1周期以上が重複するように配置している。このように構成することによって、各々のMR素子50a〜50pから出力された電圧の大きさ、及び隣接するMR素子50a〜50pから出力された電圧によって、MR素子50a〜50pに対する磁気スケール60の精細な位置を検出することが可能である。以下、図3の破線の四角形で囲まれた部分を参照しながら具体的に説明する。
【0041】
MR素子50a〜50pから出力される電圧は、ピストンロッド30のストロークに応じて略サイン波状に変動する。よって、出力された電圧の大きさを見れば、対応するピストンロッド30のストロークが分かるはずである。
【0042】
しかしながら、MR素子50bから出力された略サイン波状の電圧の最初の2分の1周期に着目すると、電圧が上昇して下降する中で、同じ大きさの電圧が上昇時と下降時の二度出力される。つまり、これだけでは上昇時の電圧と下降時の電圧とのどちらが出力されているのか判定できない。そこで、ストロークセンサ100では隣接するMR素子50a〜50pから出力される電圧を用いて判定を行う。
【0043】
図3の破線の四角形の範囲において、ピストンロッド30が伸び出してゆき、MR素子50bから電圧が検出され上昇し始めたときには、隣接するMR素子50aからの電圧が出力されてる。ピストンロッド30が更に伸び出し、MR素子50bからの電圧が下降し始めたときには、MR素子50aからの電圧は出力されなくなる。よって、隣接するMR素子50aからの電圧の出力が有るときには上昇時であり、無いときには下降時であると判定することができる。
【0044】
同様に、ピストンロッド30が更に伸び出し、MR素子50bから出力される電圧が負の値になり更に下降してゆくときには、MR素子50bのみから電圧出力が出力される。ピストンロッド30が更に伸び出し、MR素子50bから出力される電圧が下限値から再び上昇し始めると、隣接するMR素子50cからの電圧が出力される。よって、隣接するMR素子50cからの電圧の出力が無いときには下降時であり、有るときには上昇時であると判定することができる。
【0045】
以上のように、隣接するMR素子50a,50cから出力される電圧で補完することによって、MR素子50bから出力される電圧の大きさに応じたピストンロッド30のストロークを精細に検出することが可能である。
【0046】
以上の実施の形態によれば、以下に示すような効果を奏する。
【0047】
本発明では、ピストンロッド30のストロークによって磁気スケール60が対峙するMR素子50a〜50pが異なる。よって、MRセンサ50において円周上のどの位置のMR素子50a〜50pが磁気スケール60を検出したかによって、ピストンロッド30のストロークが分かる。したがって、シリンダ10におけるピストンロッド30の絶対的なストロークを検出することができる。
【0048】
また、MRセンサ50は、MR素子50a〜50pの検出可能範囲が互いに重複するように配置されている。よって、MRセンサ50が磁気スケール60を検出できずに信号が出力されない状態にはならず、ピストンロッド30がどのストロークであっても検出可能である。
【0049】
また、各々のMRセンサ50a〜50pからのサイン波状の出力の略4分の1周期以上が重複するように配置することによって、各々のMR素子50a〜50pから出力された電圧の大きさ、及び隣接するMR素子50a〜50pから出力された電圧によって、ピストンロッド30の精細なストロークを検出することが可能である。
(第2の実施の形態)
以下、図4を参照しながら本発明の第2の実施の形態について説明する。なお、以下に示す各実施形態では前述した実施形態と同様の構成には同一の符号を付し、重複する説明は適宜省略する。
【0050】
第2の実施の形態では、ピストンロッド230に形成される磁気スケール260の形状が第1の実施の形態とは相違する。この磁気スケール260は、長尺のピストンロッドを使用する場合や、精細な分解能が要求される場合などに適用される。
【0051】
精細な分解能が要求される場合には、第1の実施の形態における螺旋状の非磁性体である磁気スケール60を、より短いストロークに適用する必要がある。ピストンロッドの全ストロークをMR素子50a〜50bの個数で除した大きさがストロークセンサの分解能であるためである。そこで、ピストンロッド230には、磁気スケール60と同様の螺旋形状を短いストロークに適用し、同一周期の螺旋のみではなく複数の周期の螺旋によって構成される磁気スケール260を形成する。
【0052】
しかしながら、磁気スケール60が連続して形成されて螺旋の二周期目に入ると、円周上の位置が一周期目の螺旋と同一の箇所が形成されてしまう。そのため、ピストンロッド230には、多条の螺旋261〜263を備える磁気スケール260が形成される。
【0053】
磁気スケール260は、ピストンロッド230の表面に形成される三本の螺旋状の非磁性体によって構成される。磁気スケール260は、ピストンロッド230の自由端233から最後端234まで、長手方向全体にわたって形成される。
【0054】
第1の螺旋261は、ピストンロッド230の自由端233から形成される。第1の螺旋261は、ピストンロッド230のストローク全体に三周期分形成される。第1の螺旋261が単独で形成されるエリアを、一条エリア271とする。
【0055】
第1の螺旋261の二周期目からは、第1の螺旋261と所定の間隔をあけて並行するように第2の螺旋262が二周期分だけ形成される。第1の螺旋261と第2の螺旋262のみが形成されるエリアを、二条エリア272とする。
【0056】
第1の螺旋261の三周期目からは、第2の螺旋262と所定の間隔をあけて並行するように、第3の螺旋263が一周期分だけ形成される。第1の螺旋261,第2の螺旋262,及び第3の螺旋262が形成されるエリアを、三条エリア273とする。
【0057】
以下では、ピストンロッド230が最収縮位置にある状態から伸び出す場合について説明する。ここでは、各々の螺旋261〜263間の所定の間隔は、MR素子50a〜50pの配設されるピッチと同一であるとする。
【0058】
ピストンロッド230が伸び出すと、まず一条エリア271がMRセンサ50によって検出される。一条エリア271では、第1の実施の形態と同様にMRセンサ50を構成するMR素子50a〜50pのいずれか一つから電圧が出力され、ピストンロッド230のストロークが検出できる。
【0059】
ピストンロッド230が更に伸び出すと、二条エリア272がMRセンサ50によって検出される。ここで、第1の螺旋261の円周上の位置のみに着目すると、一条エリア271にも円周上の同一の位置に第1の螺旋261が形成されているストロークが存在する。よって、一条エリア271なのか二条エリア272なのかが分からない。
【0060】
しかしながら、二条エリア272では第1の螺旋261と並行して第2の螺旋262が形成されている。よって、MRセンサ50におけるMR素子50a〜50pのうち隣接する二つから電圧が出力されるため、二条エリア272であることが分かる。
【0061】
同様に、ピストンロッド230が更に伸び出して、三条エリア273がMRセンサ50によって検出されたときには、MRセンサ50におけるMR素子50a〜50pのうち隣接する三つから電圧が出力されるため、三条エリア273であることが分かる。
【0062】
したがって、磁気スケール260を形成することによって絶対的なストロークが検出可能である。このように、二重及び三重の螺旋を形成する他にも、二周期目及び三周期目の螺旋の太さを変えて非磁性体を形成することなども可能である。例えば、二周期目の螺旋をMRセンサ50a〜50pのうち隣接する二つで検出可能な太さで形成し、三周期目の螺旋を隣接する三つで検出可能な太さで形成すれば同様の効果が得られるためである。
【0063】
以上の実施の形態によれば、二重,三重の螺旋261〜263を形成することによって、螺旋一周期分に相当するピストンロッド230のストロークが短くなる。よって、精細な分解能が要求される場合にも適用することができる。また、多条螺旋を形成することによって螺旋を何周期にもわたって連続して形成することができる。よって、長尺のピストンロッドを使用する場合にも適用することができる。
(第3の実施の形態)
以下、図5を参照しながら本発明の第3の実施の形態について説明する。
【0064】
第3の実施の形態では、ピストンロッド330に形成される磁気スケール360の形状がこれまでの実施の形態とは相違する。この磁気スケール360は、シリンダチューブ20に対してピストンロッド330が回転した場合にも、ピストンロッド330の絶対的なストロークを検出可能な形状に形成される。
【0065】
磁気スケール360は、ピストンロッド330の最先端部333から最後端部334まで、ストローク全体にわたってピストンロッド330の表面に形成される三角形の面状の非磁性体によって構成される。磁気スケール360は、ピストンロッド330の最先端部333に三角形の頂点が位置し、ストロークに対して比例的に幅が大きくなり、最後端部334に三角形の底辺が位置するように形成される。磁気スケール360は直角三角形であるが、例えば、直角三角形でなくても最先端部333に頂点が位置し最後端部334に底辺が位置する三角形であればよい。
【0066】
以下では、ピストンロッド330が最収縮位置にある状態から伸び出す場合について説明する。
【0067】
ピストンロッド330が伸び出すと、まずMR素子50a〜50pのうち一つのMR素子50aが磁気スケール360を検出して電圧を出力する。ピストンロッド330が更に伸び出すと、隣接するMR素子50bも磁気スケール360を検出し、二つのMR素子50a,50bから電圧が出力される。このように、ピストンロッド330が伸び出すにつれてMR素子50a〜50pのうち磁気スケール360を検出する素子の数が徐々に増えてゆく。これにより、MRセンサ50の出力からピストンロッド330の絶対的なストロークを検出することが可能である。
【0068】
ここで、ピストンロッド330が同一のストロークを維持したまま軸中心に回転したとすると、二つのMR素子50a,50bから出力されていた電圧が、例えばMR素子50c,50dから出力されるようになる。このように、電圧を出力するMR素子50a〜50bは異なっても、電圧を出力するMR素子50a〜50pの個数は変化しない。よって、ピストンロッド330が軸中心に回転したとしても、ピストンロッド330のストロークを検出することができる。
【0069】
以上の実施の形態では、ピストンロッド330に形成される磁気スケール360を、略三角形の非磁性体で構成している。よって、磁気スケール360を検出するMR素子50a〜50pの個数によって、ピストンロッド330がシリンダチューブ20に対して回転した場合にも、ピストンロッド330の絶対的なストロークを検出可能である。
【0070】
本発明は上記の実施の形態に限定されずに、その技術的な思想の範囲内において種々の変更がなしうることは明白である。
【産業上の利用可能性】
【0071】
本発明に係るストロークセンサは、シリンダなど直動部品のストロークを検出するセンサとして利用できる。
【符号の説明】
【0072】
100 ストロークセンサ
10 シリンダ
20 シリンダチューブ
30 ピストンロッド
50 MRセンサ
50a〜50p MR素子
60 磁気スケール
【特許請求の範囲】
【請求項1】
シリンダ本体であるシリンダチューブと、
前記シリンダチューブに対して進退自在に設けられるピストンロッドと、を備えるシリンダのストロークセンサであって、
前記ピストンロッドは、ストロークに伴って円周上の位置が異なるように軸方向に形成されるスケールを備え、
前記シリンダチューブは、前記ピストンロッドの周囲を囲むように等間隔で設けられ前記スケールを検出可能な複数の検出素子を同一円周上に備えることを特徴とするシリンダのストロークセンサ。
【請求項2】
前記検出素子は、互いに隣り合う検出素子同士の検出可能範囲が重複するように配置されることを特徴とする請求項1に記載のシリンダのストロークセンサ。
【請求項3】
前記ピストンロッドは磁性体で形成され、
前記スケールは、非磁性体によって構成される磁気スケールであり、
前記検出素子は前記非磁性体を検出可能な磁気抵抗素子であることを特徴とする請求項1又は2に記載のシリンダのストロークセンサ。
【請求項4】
前記磁気スケールは、同一周期の螺旋形状に形成されることを特徴とする請求項3に記載のシリンダのストロークセンサ。
【請求項5】
前記磁気スケールは、複数周期の螺旋形状に形成され、
周期数に応じて順次数が増加するように複数の螺旋が並行して形成されることを特徴とする請求項3に記載のシリンダのストロークセンサ。
【請求項6】
前記磁気スケールは、ストロークに対して比例的に幅が大きくなるように形成されることを特徴とする請求項3に記載のシリンダのストロークセンサ。
【請求項1】
シリンダ本体であるシリンダチューブと、
前記シリンダチューブに対して進退自在に設けられるピストンロッドと、を備えるシリンダのストロークセンサであって、
前記ピストンロッドは、ストロークに伴って円周上の位置が異なるように軸方向に形成されるスケールを備え、
前記シリンダチューブは、前記ピストンロッドの周囲を囲むように等間隔で設けられ前記スケールを検出可能な複数の検出素子を同一円周上に備えることを特徴とするシリンダのストロークセンサ。
【請求項2】
前記検出素子は、互いに隣り合う検出素子同士の検出可能範囲が重複するように配置されることを特徴とする請求項1に記載のシリンダのストロークセンサ。
【請求項3】
前記ピストンロッドは磁性体で形成され、
前記スケールは、非磁性体によって構成される磁気スケールであり、
前記検出素子は前記非磁性体を検出可能な磁気抵抗素子であることを特徴とする請求項1又は2に記載のシリンダのストロークセンサ。
【請求項4】
前記磁気スケールは、同一周期の螺旋形状に形成されることを特徴とする請求項3に記載のシリンダのストロークセンサ。
【請求項5】
前記磁気スケールは、複数周期の螺旋形状に形成され、
周期数に応じて順次数が増加するように複数の螺旋が並行して形成されることを特徴とする請求項3に記載のシリンダのストロークセンサ。
【請求項6】
前記磁気スケールは、ストロークに対して比例的に幅が大きくなるように形成されることを特徴とする請求項3に記載のシリンダのストロークセンサ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2010−255715(P2010−255715A)
【公開日】平成22年11月11日(2010.11.11)
【国際特許分類】
【出願番号】特願2009−105217(P2009−105217)
【出願日】平成21年4月23日(2009.4.23)
【出願人】(000000929)カヤバ工業株式会社 (2,151)
【Fターム(参考)】
【公開日】平成22年11月11日(2010.11.11)
【国際特許分類】
【出願日】平成21年4月23日(2009.4.23)
【出願人】(000000929)カヤバ工業株式会社 (2,151)
【Fターム(参考)】
[ Back to top ]