
シールド工事における地盤沈下量抑制方法
【課題】シールド機の位置と沈下性状から沈下量を予測してシールド機の掘進管理の制御をリアルタイムで行うことのできるシールド工事における地盤沈下量抑制方法を提供する。
【解決手段】路線上の沈下データ26、28、30、と、シールド機の位置を特定する位置データ34と、シールド機の掘進管理データ38とを連続して求める工程と、上記データと時間データを組み込んでシールド機の位置と沈下データ26、28、30とを関連づける工程と、前記シールド機の位置と沈下データ26、28、30との関連づけに基づいてシールド機の各位置における沈下性状をリアルタイムで沈下特性曲線としてグラフ化し、画像表示する工程と、沈下特性曲線に基づいて沈下量を予測し、事前にシールド機の切羽水圧、土砂取り込み量、掘進速度、シールド機の姿勢、泥水粘性、裏込め注入量、カッター圧力等の制御を行って沈下量を抑制する工程とを含む。
【解決手段】路線上の沈下データ26、28、30、と、シールド機の位置を特定する位置データ34と、シールド機の掘進管理データ38とを連続して求める工程と、上記データと時間データを組み込んでシールド機の位置と沈下データ26、28、30とを関連づける工程と、前記シールド機の位置と沈下データ26、28、30との関連づけに基づいてシールド機の各位置における沈下性状をリアルタイムで沈下特性曲線としてグラフ化し、画像表示する工程と、沈下特性曲線に基づいて沈下量を予測し、事前にシールド機の切羽水圧、土砂取り込み量、掘進速度、シールド機の姿勢、泥水粘性、裏込め注入量、カッター圧力等の制御を行って沈下量を抑制する工程とを含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、シールド工事における地盤沈下量抑制方法に関し、特に、リアルタイムで沈下量を抑制することのできるシールド工事における地盤沈下量抑制方法に関する。
【背景技術】
【0002】
近年のシールド工事は、大断面、長距離、超近接、急曲線など厳しい条件下での工事となってきており、地盤や構造物に対する影響防止対策が大きな課題となっている。
【0003】
一般に、シールド工事で発生する地盤の沈下量は沈下計を用いて沈下量を計測管理しているが、その計測値が沈下基準内か否かで判断しているのが通常である。
【0004】
一方で、シールド機回りの力学的釣り合いから地盤変位を算出して、地盤変位を直接有限要素法による入力データとしてシールドトンネル通過時の地盤変位を予測する試みもなされている(特許文献1参照)。
【特許文献1】特開2004−197386号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
前述のように、シールドトンネル通過時の地盤変位を予測しても、シールド機の掘進管理とリアルタイムで結びつかなければ、地盤沈下の有効な抑制にはつながらない。
【0006】
本発明の目的は、シールド機の位置と沈下性状から沈下量を予測してシールド機の掘進管理の制御をリアルタイムで行うことのできるシールド工事における地盤沈下量抑制方法を提供することにある。
【課題を解決するための手段】
【0007】
前記目的を達成するため、本発明のシールド工事における地盤沈下量抑制方法は、路線上に設置した沈下計の沈下データと、ジャイロや測量によるシールド機の位置を特定する位置データと、シールド機の掘進速度、ジャッキストローク、カッター圧力、ローリング、ピッチング、ヨーイング、切羽水圧、土砂取り込み量、泥水粘性、裏込め注入量等の掘進管理データとを連続して求める工程と、
前記沈下データ、位置データ及び掘進管理データに時間データを組み込んでシールド機の位置と沈下データとを関連づける工程と、
前記シールド機の位置と沈下データとの関連づけに基づいて前記シールド機の各位置における沈下性状をリアルタイムで沈下特性曲線としてグラフ化し、画像表示する工程と、
前記沈下特性曲線に基づいて沈下量を予測し、事前にシールド機の切羽水圧、土砂取り込み量、掘進速度、シールド機の姿勢、泥水粘性、裏込め注入量、カッター圧力等の制御を行って沈下量を抑制する工程と、
を含むことを特徴とする。
【0008】
本発明によれば、沈下データ、位置データ及び掘進管理データに時間データを組み込むことで、シールド機の位置と沈下データとを関連づけることができ、これを基にシールド機の各位置における沈下性状をリアルタイムで沈下特性曲線として表示できることとなる。
【0009】
そして、この沈下特性曲線に基づいて沈下量を予測し、事前にシールド機の掘進制御をリアルタイムで行うことで、沈下量の抑制が行えることとなる。
【0010】
本発明においては、前記シールド機位置よりも前方位置に沈下計を設置して切羽前方の沈下量を計測し、その計測値からシールド機通過後の沈下量を予測し、事前にシールド機の切羽水圧、土砂取り込み量、掘進速度、シールド機の姿勢、泥水粘性、裏込め注入量、カッター圧力等の制御を行って沈下量を抑制することができる。
【0011】
このような構成とすることにより、前方沈下量の予測と事前の掘進制御により、より確実な沈下抑制を行うことが可能となる。
【発明を実施するための最良の形態】
【0012】
以下、本発明の実施の形態について、図面を参照して説明する。
【0013】
図1〜図3は、本発明の一実施の形態にかかるシールド工事における地盤沈下量抑制方法を示す図である。
【0014】
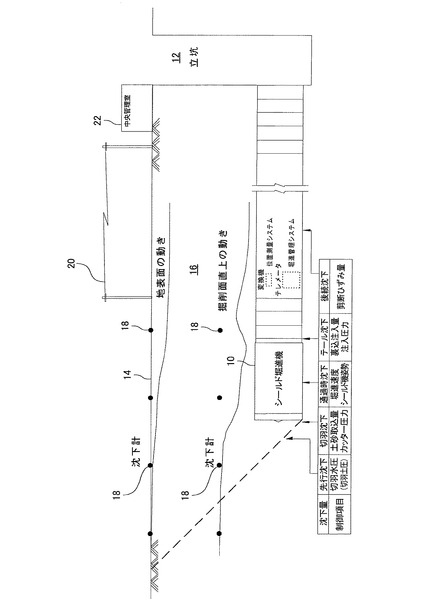
図1は、シールド機による掘進状態を示す断面図で、シールド機10は立坑12から発進して掘進を行うようになっており、シールド機10内にはジャイロやテレメータ等の位置測量システム、切羽水圧、土砂取り込み量、掘進速度、ジャッキストローク、泥水粘性、裏込め注入量、ローリング、ピッチング、ヨーイング等の掘進制御を行う掘進管理システム等が搭載されている。
【0015】
また、掘進計画路線上には、地表面14、地中16に沈下計18が設置され、掘進中の地盤の地表面及び掘削面直上の動き、すなわち沈下量を計測するようになっている。
【0016】
この沈下計18の計測値は、公衆回線20や無線を介して立坑用地内の中央管理室22に伝送されるようになっている。
【0017】
また、沈下計18は、シールド機10の前方位置にも設置され、切羽前方の沈下量も計測するようになっている。
【0018】
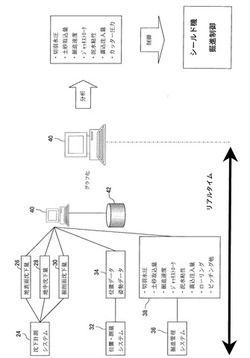
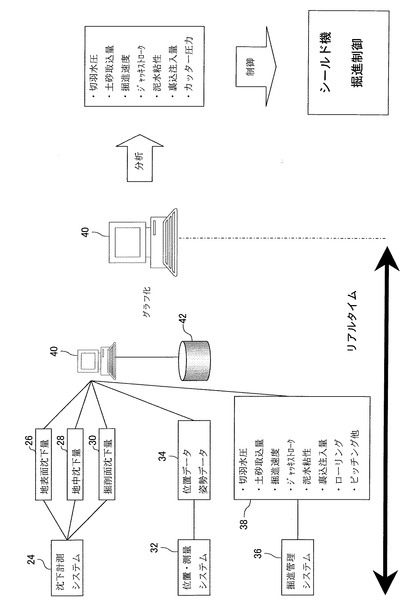
図2は、本実施の形態におけるシールド工事における地盤沈下量抑制方法を示す模式図で、沈下計18による沈下計測システム24により地表面沈下量の沈下データ26、地中沈下量の沈下データ28、掘削面沈下量の沈下データ30が連続して計測されるようになっている。
【0019】
また、シールド機10では、ジャイロ等の位置・測量システム32によりシールド機の位置が連続して計測され、位置データや姿勢データ34が求められるようになっている。
【0020】
また、シールド機10の掘進管理システム36では、切羽水圧、土砂取り込み量、掘進速度、ジャッキストローク、泥水粘性、裏込め注入量、ローリング、ピッチング、ヨーイング等の掘進制御が行われ、これらの掘進管理データ38が連続して求められている。
【0021】
そして、これらの沈下データ26、28、30、シールド機の位置データ34及び掘進管理データ38が、中央管理室22のPC40に伝送されるようになっている。
【0022】
PC40では、これらの沈下データ26、28、30、シールド機の位置データ34及び掘進管理データ38に時系列−位置データベース42によって時間データが組み込まれ、シールド機10の位置と沈下データ26、28、30とが関連づけられるようになっている。
【0023】
このシールド機10の位置と沈下データ26、28、30との関連づけに基づいて、シールド機10の各位置における沈下性状をリアルタイムで沈下特性曲線としてグラフ化し、PC40に画像表示するようになっている。
【0024】
そして、この沈下特性曲線に基づいて、次の掘進時における沈下量を分析、予測し、事前にシールド機10の切羽水圧、土砂取り込み量、掘進速度、シールド機の姿勢、泥水粘性、裏込め注入量、カッター圧力等の制御を行って沈下量を抑制するようになっている。
【0025】
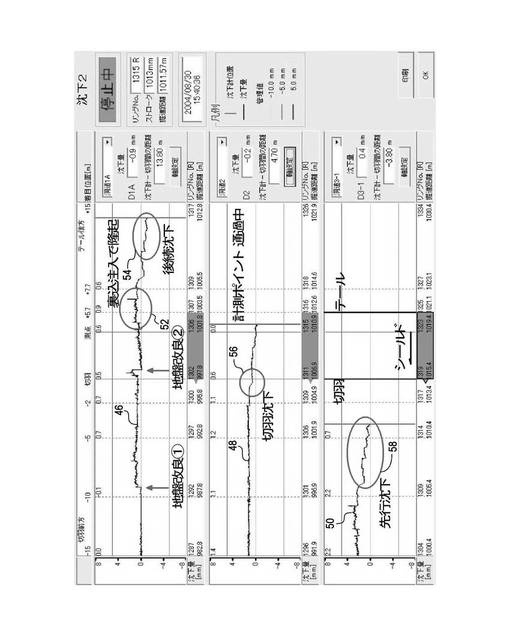
図3は、画像表示される沈下特性曲線が表示された沈下管理図の一例を示す図である。
【0026】
この沈下管理図では、横軸にシールド機10の位置として、時間ごとの掘進距離が示され、縦軸に沈下量が示されたものが上下3段に表示され、各段に沈下特性曲線46、48、50が表示されている。
【0027】
上段の沈下特性曲線46はシールド機通過後の沈下量、中段の沈下特性曲線48はシールド機通過中の沈下量、下段の沈下特性曲線50はシールド機通過前の切羽前方の沈下量を示している。
【0028】
これらの沈下特性曲線46、48、50によれば、シールド機10のテール部付近に裏込め材注入による隆起部52が生じ、シールド機10の通過後に後続沈下部54が生じていることが分かる。
【0029】
これによって、隆起部52が生じているので裏込め材の注入量を少なく、後続沈下部54は地盤の剪断ひずみ量と関係があるので掘削時の剪断ひずみ量が小さくなるように制御すれば次掘削の沈下量を抑制することができることとなる。
【0030】
また、シールド機の前面では、切羽沈下部56が生じているのが分かる。
【0031】
これによって、土砂取り込み量を少なくするように制御することで、沈下量を抑制することができることとなる。
【0032】
さらに、切羽前方では先行沈下部58が生じているのが分かる。
【0033】
これによって、切羽水圧を上げるように制御することで、沈下抑制を行うことができることとなる。
【0034】
沈下量と制御項目との関係は、図1に示すように、主に、先行沈下に対しては切羽水圧(切羽土圧)の制御、切羽沈下に対しては土砂取り込み量とカッター圧力の制御、通過時沈下に対しては掘進速度とシールド機の姿勢の制御、テール沈下に対しては裏込め注入材の圧力と量の制御、後続沈下に対しては地盤が受ける剪断ひずみ量の制御による。
【0035】
このように、沈下データ26、28、30、位置データ34及び掘進管理データ38に時間データを組み込むことで、シールド機10の位置と沈下データ26、28、30とを関連づけることができ、これを基にシールド機10の各位置における沈下性状をリアルタイムに沈下特性曲線として表示できることとなる。
【0036】
そして、この沈下特性曲線に基づいて沈下量を予測し、事前にシールド機10の掘進制御をリアルタイムで行うことで、沈下量の抑制が行えることとなる。
【0037】
また、シールド機10位置よりも前方位置に沈下計18を設置して切羽前方の沈下量を計測し、その計測値からシールド機10通過後の沈下量を予測し、事前にシールド機10の切羽水圧、土砂取り込み量、掘進速度、シールド機の姿勢、泥水粘性、裏込め注入量、カッター圧力等の制御を行って沈下量を抑制することで、より計画的で安全な沈下抑制を行うことが可能となる。
【0038】
本発明は、前記実施の形態に限定されるものではなく、本発明の要旨の範囲内において、種々の形態に変形可能である。
【0039】
例えば、沈下特性曲線を表示する沈下管理図は、前記実施の形態に限らず、種々の形式で表示することが可能である。
【図面の簡単な説明】
【0040】
【図1】本実施の形態におけるシールド機による掘進状態を示す断面図である。
【図2】本実施の形態におけるシールド工事における地盤沈下量抑制方法を示す模式図である。
【図3】画像表示される沈下特性曲線が表示された沈下管理図の一例を示す図である。
【符号の説明】
【0041】
10 シールド機
12 立杭
14 地表面
16 地中
18 沈下計
20 回線通信
22 中央管理室
24 沈下計測システム
26、28、30 沈下データ
32 位置・計測システム
34 位置データ
36 掘進管理システム
38 掘進管理データ
40 PC(パソコン)
42 時系列一位置データベース
46、48、50 沈下特性曲線
52 隆起部
54 後続沈下部
56 切羽沈下部
58 先行沈下部
【技術分野】
【0001】
本発明は、シールド工事における地盤沈下量抑制方法に関し、特に、リアルタイムで沈下量を抑制することのできるシールド工事における地盤沈下量抑制方法に関する。
【背景技術】
【0002】
近年のシールド工事は、大断面、長距離、超近接、急曲線など厳しい条件下での工事となってきており、地盤や構造物に対する影響防止対策が大きな課題となっている。
【0003】
一般に、シールド工事で発生する地盤の沈下量は沈下計を用いて沈下量を計測管理しているが、その計測値が沈下基準内か否かで判断しているのが通常である。
【0004】
一方で、シールド機回りの力学的釣り合いから地盤変位を算出して、地盤変位を直接有限要素法による入力データとしてシールドトンネル通過時の地盤変位を予測する試みもなされている(特許文献1参照)。
【特許文献1】特開2004−197386号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
前述のように、シールドトンネル通過時の地盤変位を予測しても、シールド機の掘進管理とリアルタイムで結びつかなければ、地盤沈下の有効な抑制にはつながらない。
【0006】
本発明の目的は、シールド機の位置と沈下性状から沈下量を予測してシールド機の掘進管理の制御をリアルタイムで行うことのできるシールド工事における地盤沈下量抑制方法を提供することにある。
【課題を解決するための手段】
【0007】
前記目的を達成するため、本発明のシールド工事における地盤沈下量抑制方法は、路線上に設置した沈下計の沈下データと、ジャイロや測量によるシールド機の位置を特定する位置データと、シールド機の掘進速度、ジャッキストローク、カッター圧力、ローリング、ピッチング、ヨーイング、切羽水圧、土砂取り込み量、泥水粘性、裏込め注入量等の掘進管理データとを連続して求める工程と、
前記沈下データ、位置データ及び掘進管理データに時間データを組み込んでシールド機の位置と沈下データとを関連づける工程と、
前記シールド機の位置と沈下データとの関連づけに基づいて前記シールド機の各位置における沈下性状をリアルタイムで沈下特性曲線としてグラフ化し、画像表示する工程と、
前記沈下特性曲線に基づいて沈下量を予測し、事前にシールド機の切羽水圧、土砂取り込み量、掘進速度、シールド機の姿勢、泥水粘性、裏込め注入量、カッター圧力等の制御を行って沈下量を抑制する工程と、
を含むことを特徴とする。
【0008】
本発明によれば、沈下データ、位置データ及び掘進管理データに時間データを組み込むことで、シールド機の位置と沈下データとを関連づけることができ、これを基にシールド機の各位置における沈下性状をリアルタイムで沈下特性曲線として表示できることとなる。
【0009】
そして、この沈下特性曲線に基づいて沈下量を予測し、事前にシールド機の掘進制御をリアルタイムで行うことで、沈下量の抑制が行えることとなる。
【0010】
本発明においては、前記シールド機位置よりも前方位置に沈下計を設置して切羽前方の沈下量を計測し、その計測値からシールド機通過後の沈下量を予測し、事前にシールド機の切羽水圧、土砂取り込み量、掘進速度、シールド機の姿勢、泥水粘性、裏込め注入量、カッター圧力等の制御を行って沈下量を抑制することができる。
【0011】
このような構成とすることにより、前方沈下量の予測と事前の掘進制御により、より確実な沈下抑制を行うことが可能となる。
【発明を実施するための最良の形態】
【0012】
以下、本発明の実施の形態について、図面を参照して説明する。
【0013】
図1〜図3は、本発明の一実施の形態にかかるシールド工事における地盤沈下量抑制方法を示す図である。
【0014】
図1は、シールド機による掘進状態を示す断面図で、シールド機10は立坑12から発進して掘進を行うようになっており、シールド機10内にはジャイロやテレメータ等の位置測量システム、切羽水圧、土砂取り込み量、掘進速度、ジャッキストローク、泥水粘性、裏込め注入量、ローリング、ピッチング、ヨーイング等の掘進制御を行う掘進管理システム等が搭載されている。
【0015】
また、掘進計画路線上には、地表面14、地中16に沈下計18が設置され、掘進中の地盤の地表面及び掘削面直上の動き、すなわち沈下量を計測するようになっている。
【0016】
この沈下計18の計測値は、公衆回線20や無線を介して立坑用地内の中央管理室22に伝送されるようになっている。
【0017】
また、沈下計18は、シールド機10の前方位置にも設置され、切羽前方の沈下量も計測するようになっている。
【0018】
図2は、本実施の形態におけるシールド工事における地盤沈下量抑制方法を示す模式図で、沈下計18による沈下計測システム24により地表面沈下量の沈下データ26、地中沈下量の沈下データ28、掘削面沈下量の沈下データ30が連続して計測されるようになっている。
【0019】
また、シールド機10では、ジャイロ等の位置・測量システム32によりシールド機の位置が連続して計測され、位置データや姿勢データ34が求められるようになっている。
【0020】
また、シールド機10の掘進管理システム36では、切羽水圧、土砂取り込み量、掘進速度、ジャッキストローク、泥水粘性、裏込め注入量、ローリング、ピッチング、ヨーイング等の掘進制御が行われ、これらの掘進管理データ38が連続して求められている。
【0021】
そして、これらの沈下データ26、28、30、シールド機の位置データ34及び掘進管理データ38が、中央管理室22のPC40に伝送されるようになっている。
【0022】
PC40では、これらの沈下データ26、28、30、シールド機の位置データ34及び掘進管理データ38に時系列−位置データベース42によって時間データが組み込まれ、シールド機10の位置と沈下データ26、28、30とが関連づけられるようになっている。
【0023】
このシールド機10の位置と沈下データ26、28、30との関連づけに基づいて、シールド機10の各位置における沈下性状をリアルタイムで沈下特性曲線としてグラフ化し、PC40に画像表示するようになっている。
【0024】
そして、この沈下特性曲線に基づいて、次の掘進時における沈下量を分析、予測し、事前にシールド機10の切羽水圧、土砂取り込み量、掘進速度、シールド機の姿勢、泥水粘性、裏込め注入量、カッター圧力等の制御を行って沈下量を抑制するようになっている。
【0025】
図3は、画像表示される沈下特性曲線が表示された沈下管理図の一例を示す図である。
【0026】
この沈下管理図では、横軸にシールド機10の位置として、時間ごとの掘進距離が示され、縦軸に沈下量が示されたものが上下3段に表示され、各段に沈下特性曲線46、48、50が表示されている。
【0027】
上段の沈下特性曲線46はシールド機通過後の沈下量、中段の沈下特性曲線48はシールド機通過中の沈下量、下段の沈下特性曲線50はシールド機通過前の切羽前方の沈下量を示している。
【0028】
これらの沈下特性曲線46、48、50によれば、シールド機10のテール部付近に裏込め材注入による隆起部52が生じ、シールド機10の通過後に後続沈下部54が生じていることが分かる。
【0029】
これによって、隆起部52が生じているので裏込め材の注入量を少なく、後続沈下部54は地盤の剪断ひずみ量と関係があるので掘削時の剪断ひずみ量が小さくなるように制御すれば次掘削の沈下量を抑制することができることとなる。
【0030】
また、シールド機の前面では、切羽沈下部56が生じているのが分かる。
【0031】
これによって、土砂取り込み量を少なくするように制御することで、沈下量を抑制することができることとなる。
【0032】
さらに、切羽前方では先行沈下部58が生じているのが分かる。
【0033】
これによって、切羽水圧を上げるように制御することで、沈下抑制を行うことができることとなる。
【0034】
沈下量と制御項目との関係は、図1に示すように、主に、先行沈下に対しては切羽水圧(切羽土圧)の制御、切羽沈下に対しては土砂取り込み量とカッター圧力の制御、通過時沈下に対しては掘進速度とシールド機の姿勢の制御、テール沈下に対しては裏込め注入材の圧力と量の制御、後続沈下に対しては地盤が受ける剪断ひずみ量の制御による。
【0035】
このように、沈下データ26、28、30、位置データ34及び掘進管理データ38に時間データを組み込むことで、シールド機10の位置と沈下データ26、28、30とを関連づけることができ、これを基にシールド機10の各位置における沈下性状をリアルタイムに沈下特性曲線として表示できることとなる。
【0036】
そして、この沈下特性曲線に基づいて沈下量を予測し、事前にシールド機10の掘進制御をリアルタイムで行うことで、沈下量の抑制が行えることとなる。
【0037】
また、シールド機10位置よりも前方位置に沈下計18を設置して切羽前方の沈下量を計測し、その計測値からシールド機10通過後の沈下量を予測し、事前にシールド機10の切羽水圧、土砂取り込み量、掘進速度、シールド機の姿勢、泥水粘性、裏込め注入量、カッター圧力等の制御を行って沈下量を抑制することで、より計画的で安全な沈下抑制を行うことが可能となる。
【0038】
本発明は、前記実施の形態に限定されるものではなく、本発明の要旨の範囲内において、種々の形態に変形可能である。
【0039】
例えば、沈下特性曲線を表示する沈下管理図は、前記実施の形態に限らず、種々の形式で表示することが可能である。
【図面の簡単な説明】
【0040】
【図1】本実施の形態におけるシールド機による掘進状態を示す断面図である。
【図2】本実施の形態におけるシールド工事における地盤沈下量抑制方法を示す模式図である。
【図3】画像表示される沈下特性曲線が表示された沈下管理図の一例を示す図である。
【符号の説明】
【0041】
10 シールド機
12 立杭
14 地表面
16 地中
18 沈下計
20 回線通信
22 中央管理室
24 沈下計測システム
26、28、30 沈下データ
32 位置・計測システム
34 位置データ
36 掘進管理システム
38 掘進管理データ
40 PC(パソコン)
42 時系列一位置データベース
46、48、50 沈下特性曲線
52 隆起部
54 後続沈下部
56 切羽沈下部
58 先行沈下部
【特許請求の範囲】
【請求項1】
路線上に設置した沈下計の沈下データと、ジャイロや測量によるシールド機の位置を特定する位置データと、シールド機の掘進速度、ジャッキストローク、カッター圧力、ローリング、ピッチング、ヨーイング、切羽水圧、土砂取り込み量、泥水粘性、裏込め注入量等の掘進管理データとを連続して求める工程と、
前記沈下データ、位置データ及び掘進管理データに時間データを組み込んでシールド機の位置と沈下データとを関連づける工程と、
前記シールド機の位置と沈下データとの関連づけに基づいて前記シールド機の各位置における沈下性状をリアルタイムで沈下特性曲線としてグラフ化し、画像表示する工程と、
前記沈下特性曲線に基づいて沈下量を予測し、事前にシールド機の切羽水圧、土砂取り込み量、掘進速度、シールド機の姿勢、泥水粘性、裏込め注入量、カッター圧力等の制御を行って沈下量を抑制する工程と、
を含むことを特徴とするシールド工事における地盤沈下量抑制方法。
【請求項2】
請求項1において、
前記シールド機位置よりも前方位置に沈下計を設置して切羽前方の沈下量を計測し、その計測値からシールド機通過後の沈下量を予測し、事前にシールド機の切羽水圧、土砂取り込み量、掘進速度、シールド機の姿勢、泥水粘性、裏込め注入量、カッター圧力等の制御を行って沈下量を抑制することを特徴とするシールド工事における地盤沈下量抑制方法。
【請求項1】
路線上に設置した沈下計の沈下データと、ジャイロや測量によるシールド機の位置を特定する位置データと、シールド機の掘進速度、ジャッキストローク、カッター圧力、ローリング、ピッチング、ヨーイング、切羽水圧、土砂取り込み量、泥水粘性、裏込め注入量等の掘進管理データとを連続して求める工程と、
前記沈下データ、位置データ及び掘進管理データに時間データを組み込んでシールド機の位置と沈下データとを関連づける工程と、
前記シールド機の位置と沈下データとの関連づけに基づいて前記シールド機の各位置における沈下性状をリアルタイムで沈下特性曲線としてグラフ化し、画像表示する工程と、
前記沈下特性曲線に基づいて沈下量を予測し、事前にシールド機の切羽水圧、土砂取り込み量、掘進速度、シールド機の姿勢、泥水粘性、裏込め注入量、カッター圧力等の制御を行って沈下量を抑制する工程と、
を含むことを特徴とするシールド工事における地盤沈下量抑制方法。
【請求項2】
請求項1において、
前記シールド機位置よりも前方位置に沈下計を設置して切羽前方の沈下量を計測し、その計測値からシールド機通過後の沈下量を予測し、事前にシールド機の切羽水圧、土砂取り込み量、掘進速度、シールド機の姿勢、泥水粘性、裏込め注入量、カッター圧力等の制御を行って沈下量を抑制することを特徴とするシールド工事における地盤沈下量抑制方法。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2007−284903(P2007−284903A)
【公開日】平成19年11月1日(2007.11.1)
【国際特許分類】
【出願番号】特願2006−110734(P2006−110734)
【出願日】平成18年4月13日(2006.4.13)
【出願人】(000166432)戸田建設株式会社 (328)
【Fターム(参考)】
【公開日】平成19年11月1日(2007.11.1)
【国際特許分類】
【出願日】平成18年4月13日(2006.4.13)
【出願人】(000166432)戸田建設株式会社 (328)
【Fターム(参考)】
[ Back to top ]