
シーンの画像のぶれを低減するための方法、画像のぶれを低減するための方法、及び画像のぶれを低減するように構成されたカメラ
【課題】移動物体から取得された画像の動きぶれの影響を除去する。各画像の点像分布関数(PSF)がぶれに起因して反転不能であっても、画像のセットにおける動きぶれを反転する。
【解決手段】まず、シーンの画像のセットを取得する。画像のセットにおける各画像は、点像分布関関数(PSF)のセットを形成する点像分布関数(PSF)に関連付けられたぶれを有する物体を含み、PSFのセットは、ヌル充填演算に適合している。次に、画像のセット及びPSFのセットを一緒に反転し、低減されたぶれを有する出力画像を生成する。
【解決手段】まず、シーンの画像のセットを取得する。画像のセットにおける各画像は、点像分布関関数(PSF)のセットを形成する点像分布関数(PSF)に関連付けられたぶれを有する物体を含み、PSFのセットは、ヌル充填演算に適合している。次に、画像のセット及びPSFのセットを一緒に反転し、低減されたぶれを有する出力画像を生成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、包括的には、画像処理に関し、より詳細には、移動物体から取得された画像の動きぶれの影響を除去することに関する。
【背景技術】
【0002】
動きぶれは、画像が取得されている間のカメラとシーンとの間の相対的な動きに起因して生じる。その動きが少なくとも局所的にシフト不変であり、且つ、ぶれを引き起こした、点像分布関数(PSF)としても知られているぶれ関数が判明している場合には、動きぶれのある画像は、画像逆畳み込みによって、喪失した空間周波数に至るまで復元することができる。
【0003】
反転可能な(invertible:可逆的な)動きPSFを保持することは、従来の画像では可能ではない。有限の露出時間によるボックス関数は、ローパスフィルタを有する畳み込みに対応し、したがって、PSFの周波数変換はゼロ(ヌル)を含む。PSFのヌルに対応する周波数は失われ、これによって、ぶれ補正は効果がなくなる。従来の方法は、特殊化されたカメラを使用してPSFを求める。
【0004】
例えば、1つの従来の方法は、広帯域バイナリコードを使用して、露出時間の間シャッタを開閉する。広帯域コードには、周波数領域にヌルがなく、それにより、その結果生成されるPSFは反転可能となる。しかしながら、その方法は、特殊化されたハードウェアを必要とし、一定背景を前提としており、また、手動によるPSF推定及び物体セグメンテーションを必要とする。
【0005】
動き不変画像化手法(motion invariant imaging method)は、画像を取得しながら一定の加速度でカメラを移動させる。キーとなるアイデアは、一定の範囲内で動きPSFを物体の速度に対して不変とすることである。これによって、セグメンテーション及びPSF推定が不要になる。しかしながら、その方法では、動きの方向を事前に知っている必要があり、遮蔽背景(occluding background)に起因して物体境界にアーティファクトが作成され、シーンの静止部分にもぶれが危うく導入される。
【0006】
波面符号化方法は、レンズの前に立方相板を使用して、PSFをシーンの深さに対して不変とする。しかしながら、その方法の結果、当初焦点が合っていたシーンの部分に焦点ずれのぶれが生じることになる。
【0007】
別の方法は、広帯域バイナリ符号でカメラのシャッタを開閉して、PSFを反転可能にする。カメラの動きを加速することにより、静止部分にぶれが生じるという代償を払って、動きPSFは物体の速度に対して不変となる。
【0008】
従来の民生用カメラは、慣性センサによって制御された適応光学素子を使用して画像安定化を行い、カメラの動きを補償する。
【0009】
ハイブリッドカメラは、補助低解像度高フレームレートを使用してPSFを推定するハイブリッド画像化システムを使用して、高解像度1次センサ画像のぶれを補正する。しかしながら、その方法は、PSF推定用の補助カメラを必要とする。
【0010】
動きPSFは、PSF推定用の短い露出及び推定されたPSFを使用した画像ぶれ補正用の長い露出の2つの異なる露出を有する連続画像からの部分情報を組み合わせることによって推定されていた。しかしながら、短い露出で画像を取得するには、特殊なカメラが必要とされる。
【0011】
重なり合った露出時間及び再構成可能なマルチカメラアレイを有する複数の定位置カメラも、取得画像の時間解像度を増加させるのに使用されてきた。しかしながら、PSF反転用に単一の従来のカメラを使用することが望まれている。
【0012】
したがって、たとえ各画像のPSFがぶれに起因して反転不能であり、画像が単一の従来のカメラによって取得されても、シーンのぶれを補正することが望まれている。
【発明の概要】
【発明が解決しようとする課題】
【0013】
たとえ各画像の点像分布関数(PSF)がぶれに起因して反転不能であっても、画像のセットにおける動きぶれを反転することが、主題発明の目的である。
【課題を解決するための手段】
【0014】
ぶれのある画像は、PSFの周波数変換においてヌル(ゼロ)を示し、これによって、逆畳み込みは不良設定になる。この問題を回避するハードウェアの解決法では、符号化露出カメラ又は加速度モーションセンサ等の特殊化されたデバイスを必要とする。従来のビデオカメラが使用され、複数のPSFのヌル充填(null-filling)及びジョイント反転可能性(joint invertability)の考えが導入される。キーとなる実現は、変化するPSFでシーンの画像のセットを取得し、その結果、或る画像の周波数成分におけるヌルを他の画像が充填できるというものである。結合された周波数変換は、ヌルがなく、ぶれ補正を良設定にする。
【0015】
本発明の実施の形態は、シーンの画像のぶれを低減するための方法を説明する。まず、シーンの画像のセットを取得する。画像のセットにおける各画像は、関連のぶれと、点像分布関関数(PSF)のセットを形成する点像分布関数(PSF)とを有する物体を含み、PSFのセットは、ヌル充填演算に一緒に適合している。次に、画像のセット及びPSFのセットを一緒に反転し、低減されたぶれを有する出力画像を生成する。
【図面の簡単な説明】
【0016】
【図1】本発明の実施の形態によるマルチ画像ぶれ補正のための方法のブロック図である。
【図2】本発明の実施の形態による不良設定の点像分布関数(PSF)の模式図である。
【図3】本発明の実施の形態によるPSFヌル充填の模式図である。
【図4】本発明の実施の形態による単一画像ぶれ補正のブロック図である。
【図5】本発明の実施の形態によるマルチ画像ぶれ補正のための結合線形システムのブロック図である。
【図6】本発明の実施の形態による自動ぶれ補正のための方法のブロック図である。
【発明を実施するための形態】
【0017】
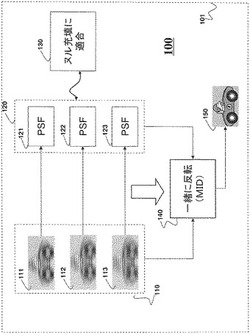
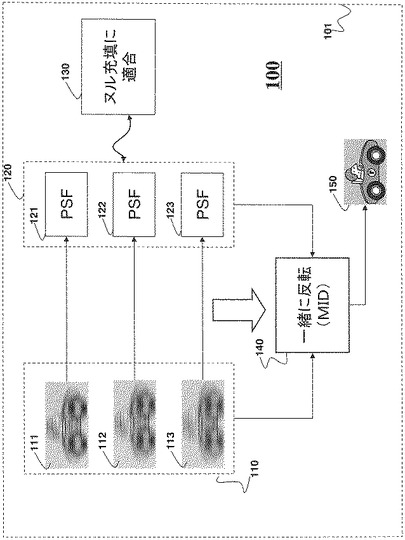
図1は、本発明の実施の形態によるシーンの画像のセット110のマルチ画像ぶれ補正の方法100を示す。各画像111〜113は、点像分布関数(PSF)121〜123のセット120に関連付けられたぶれを有する物体を含む。この方法は、PSFのセットを使用して画像のセットを一緒に反転し(140)、ぶれが低減された出力画像150を生成する。この方法のステップは、プロセッサ101によって実行される。
【0018】
画像110は、PSFのセットがヌル充填演算130に適合するようなカメラによって取得される。適合性は、異なる露出時間で画像を取得することによって達成される。
【0019】
例えば、一実施の形態では、第1の画像111が、第1の露出時間で取得され、第2の画像112が、第1の露出時間の整数倍でない第2の露出時間で取得される。いくつかの実施の形態では、自動段階露出(AEB)を有する従来のカメラを使用する。AEBによって、カメラは、異なる露出で一連の画像を撮影することが可能になる。
【0020】
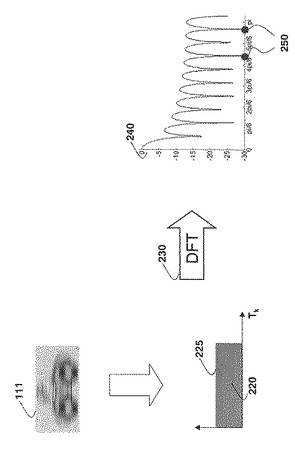
図2に示すように、従来の露出を有するカメラによって取得された単一の画像111について、動きPSFはボックスフィルタ220である。PSFの離散フーリエ変換(DFT)230は、カーディナルサイン(sinc)関数240である。カーディナルサイン(sinc)関数240は、ゼロ250を含み、したがって、ぶれ補正を不良設定にする。PSFのセット120は、第1のPSF121及び第2のPSF122を含む。特定の周波数250における第1のPSFの値はゼロに等しい。特定の周波数における第2のPSFの値は、ゼロに等しくない。
【0021】
本発明の実施の形態は、PSFヌル充填の新規な概念を使用する。図3は、異なる露出時間320で取得された複数の画像110を結合することによって、各個々のPSFのヌル330が他のPSFからのデータで充填されることを示す。したがって、結合されたPSF340は、ぶれ補正140を良条件にする。
【0022】
反転不能PSFのジョイント反転可能性
fを、物体を含むシーンの鮮明な画像を表すものとする。物体のN個のぶれのある画像ikを撮影する。各画像ikは、PSFのセットを形成する異なるPSF hkを有する。
【0023】
【数1】

【0024】
ここで、*は畳み込み演算子であり、nkは、分散σ2kを有するゼロ平均加法的白色ガウス雑音である。Tkを、k番目の画像の露出時間とする。量のフーリエ変換を、大文字を使用して表すことにする。wを周波数とすると、画像I(w)のフーリエ変換F(w)は、
【0025】
【数2】
【0026】
である。
【0027】
1次元の物体の動きが、等速でセンサ面に対して平行である場合、PSFのそれぞれは、ボックスフィルタの長さ225が露出時間Tkに比例するボックスフィルタ220に対応する。rkを、k番目のフレームにおけるぶれのサイズとする。このとき、
【0028】
【数3】
【0029】
である。
【0030】
あらゆる個々の画像の単一画像ぶれ補正(SID)は、
【0031】
【数4】
【0032】
である。ここで、F(w)は、ぶれ補正された画像のフーリエ変換を表し、
【0033】
【数5】
【0034】
は、対応する逆畳み込みフィルタvkのフーリエ変換である。
【0035】
図3は、例えばN個の画像110を使用するマルチ画像ぶれ補正(MID)のための方法を示す。好ましい実施の形態では、各周波数wにおいて、
【0036】
【数6】
【0037】
によってぶれ補正された出力画像の雑音電力を最小にすることにより、最適な逆畳み込みフィルタVk(w)が得られる。鮮明な画像を再生するために、
【0038】
【数7】
【0039】
であることに留意されたい。
【0040】
ラグランジュ乗数を使用すると、コスト関数は、
【0041】
【数8】
【0042】
であり、したがって、
【0043】
【数9】
【0044】
である。
【0045】
特定の周波数w 350においてすべてのPSF 330間で共通のゼロがある場合、その周波数におけるすべてのkについてHk(w)=0であり、V(w)は不安定になる。
【0046】
PSFのフーリエ変換において共通のゼロがない場合、各個々の画像で失われた情報は、他の或る画像によって取得される。各個々のPSFにおけるゼロは、他のPSFによって充填される。
【0047】
このように、PSFのセットが共通のゼロを有しない場合、たとえ各PSFが反転不能であっても、結合された逆畳み込みを良設定にすることができる。すなわち、PSFのセットは、ヌル充填に適合している。
【0048】
一実施の形態では、PSFは動きPSFである。しかしながら、他のタイプのPSFが本実施の形態では使用される。動きPSFの場合、これによって、露出時間が互いの整数倍になるべきでないことが必要とされる。
【0049】
【数10】
【0050】
は、結合された逆畳み込みの演算子である。
【0051】
マルチ画像ぶれ補正
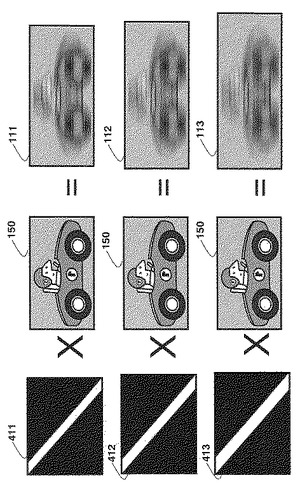
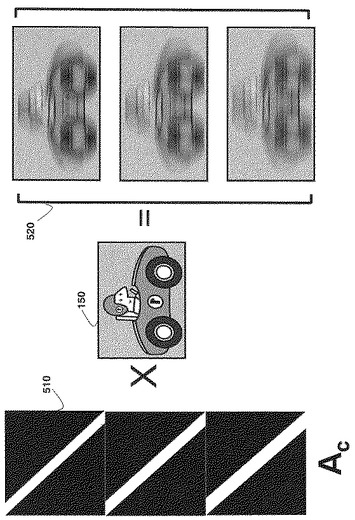
動きぶれを、鮮明な画像によって乗算される動きスミア行列(motion smear matrix)として定式化する。図4に示すように、単一画像ぶれ補正(SID)の場合、画像111〜113は、動きスミア行列411〜413に鮮明な画像150を乗算することで再生される。しかしながら、動きスミア行列はPSFによって決まるので、PSFが悪条件である場合、ぶれ補正は満足できるものではない。
【0052】
図5は、マルチ画像ぶれ補正(MID)の結合線形システムを示す。この結合線形システムでは、行列510と画像520とを結合する。動きぶれ行列の特異値は、結合ぶれ補正システムAcがより良い条件であることを示す。
【0053】
離散領域における畳み込み式は、各動きラインに対して
【0054】
【数11】
【0055】
である。ここで、Akは、画像kについての巡回動きスミア行列であり、
【0056】
【数12】
【0057】
は、ぶれのある物体を記述するベクトルであり、
【0058】
【数13】
【0059】
は、鮮明な物体を記述するベクトルであり、
【0060】
【数14】
【0061】
は、各動きラインに沿った雑音強度を記述するベクトルである。SIDの場合、ぶれ補正された物体を記述するベクトル
【0062】
【数15】
【0063】
は、コスト関数
【0064】
【数16】
【0065】
を最小にすることによって得られ、その結果、
【0066】
【数17】
【0067】
となる。
【0068】
同様に、MIDの場合、結合線形式は、
【0069】
【数18】
【0070】
である。式(9)において、Acは、結合共分散行列(combined covariance matrix)であり、
【0071】
【数19】
【0072】
は、雑音分散である。
【0073】
いくつかの実施の形態では、推定されたぶれ補正済みベクトル
【0074】
【数20】
【0075】
は、コスト関数
【0076】
【数21】
【0077】
を最小にすることによって
【0078】
【数22】
【0079】
として得られる。
【0080】
したがって、式(10)を使用して画像のセット及びPSFのセットを一緒に反転すると、ぶれが低減された出力画像が生成される。
【0081】
露出シーケンスの最適化
一実施の形態では、結合された演算子Pの最小値を最大にする露出時間を検索する。別の実施の形態では、信号依存性雑音を考慮するためにセンサ雑音特性を組み込む。光子によって生成された電子の分散は、測定された信号と共に線形に増加するので、露出時間σ2kは、σ2gray+βTkによって与えられる。ここで、σ2grayは暗雑音であり、βはカメラ依存性定数である。
【0082】
これらのパラメータを使用すると、nfによって与えられる信号対雑音比(SNR)の減少を最小にすることにより、最適な露出シーケンスが得られる。符号化露出の場合、検索空間は、ほぼ2n程度である。ここで、nは符号長であり、例えば52である。MIDの未知のものの数は、使用される異なる露出時間の数に等しい。通常、ぶれ補正には、3つ又は4つの異なる露出時間で十分であり、したがって、検索は比較的小規模である。
【0083】
自動ぶれ補正
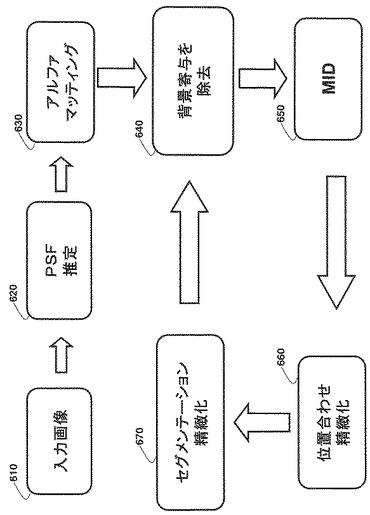
図6は、自動ぶれ補正方法のブロック図を示す。本発明の実施の形態は、平滑でない背景の前面で移動する物体を有する画像610をぶれ補正するためのジョイントPSF反転可能性を使用する。
【0084】
PSF推定
空間的に不変のぶれの場合、PSF推定620は、画像空間物体速度vと画像毎の露出時間との乗算として表される。物体速度は、画像間の動きベクトルと画像間の時間経過との間の比である。この空間的に不変のぶれの場合、画像間の動きベクトルは、対応する画像パッチを照合することによって計算される。しかしながら、露出時間が異なると、その結果、ぶれのサイズが異なることになり、したがって、照合及びPSF推定を容易にするために、画像を取得するための露出シーケンスが繰り返される。したがって、画像のセット610における画像は、N個の画像ごとに同じ露出を有する。ここで、Nは、使用される異なる露出の数(≒3〜4)である。動きベクトルは、同じ露出を使用して取得された画像を照合することによって計算することができる。異なる露出についての動きベクトルを平均化することによって、PSFの最終推定値が与えられる。
【0085】
初期化
EQ m\s\do5(k)(x\,y)は、k番目の画像における物体のバイナリマスクであり、Tiはフレーム間時間である。b(x,y)が、物体を伴わない背景画像である場合、取得された動きぶれのある画像ikは、
【0086】
【数23】
【0087】
によって与えられる。
【0088】
最初に、背景bを推定する。いくつかの実施の形態では、物体は、十分高速に移動する。すなわち、各背景ピクセルは、画像の50%未満において物体により遮蔽される。したがって、時間方向に沿ったメディアンフィルタリングを使用する。低速の移動物体の場合、背景差分を使用して背景bが求められる。
【0089】
ぶれのある画像は、ぶれのある前景及び背景の双方からの寄与を有する。画像ぶれの式(17)は、アルファマッティング(alpha matting)式の点から
【0090】
【数24】
【0091】
として、記述することができる。ここで、
【0092】
【数25】
【0093】
であり、αk=hk*mkである。アルファマップのぶれ補正は、バイナリセグメンテーションマスクmkを再生することができる。マッティングは、通常、透明な静止物体に使用され、前景の動きぶれのある物体は、不透明であり、鮮明に合焦されているものと仮定する。したがって、アルファマップは、動きぶれにのみ依存し、マッティング前景は、実際には、ぶれのある物体に対応し、鮮明な物体には対応しない。
【0094】
初期アルファマップ630を計算するために、まず、入力画像ikと背景画像bとの間の差分をしきい値処理することによって、画像毎の粗いトライマップ(crude trimap)を生成する。このトライマップは、移動物体の内部の場合は1であり、背景の場合は0であり、ぶれのある領域の場合は不明である。ホール充填(hole-filling)等のモルフォロジー演算を適用して、雑音が低減される。トライマップを使用すると、アルファマッティングは、各フレームに対して独立に実行される。
【0095】
ぶれのある前景fbkは、各入力画像からの背景寄与を除去する(640)ことによって、
【0096】
【数26】
【0097】
として得られる。
【0098】
空間的に不変の動きぶれの場合、アルファマップは、各動きラインに沿った勾配であり、雑音を有する。
【0099】
マルチ画像ぶれ補正(MID)
物体は、連続した画像では異なる位置に現れるので、ぶれのある前景fbkは、逆畳み込みの前に位置合わせする必要がある。直線的な一定の動きの場合、位置合わせは、画像平面におけるシフトに対応する。物体は物体速度vを有するので、i番目の画像と(i+1)番目の画像との間のシフトはv*Tiである。ぶれのある前景を位置合わせした後、式(10)を解くことによりMID650を使用してぶれ補正が実行される。雑音を有するアルファマップに起因して、ぶれのある画像のこの初期推定値は、雑音を有し、エラーのある背景寄与を含む。
【0100】
精緻化
動きは、実世界のシーンでは一定条件でない場合があるので、前のステップにおける前景レイヤの位置合わせは、わずかにずれている可能性がある。位置合わせミスは、逆畳み込みでエラーを引き起こす。前のステップで得られた、ぶれ補正された前景fを使用して、位置合わせを精緻化する(660)。具体的には、ブラーカーネル(blur kernel)hkを使用して鮮明な前景fにぶれを起こし、ぶれのある合成前景とfbkとの間のシフトを検出する。したがって、すべてのぶれのある前景fbksは、鮮明な前景fを通じて相関され、正確に位置合わせすることができる。
【0101】
セグメンテーションの精緻化
ぶれ補正された前景fを使用すると、精緻化されたアルファマップは、
【0102】
【数27】
【0103】
として計算される。得られたアルファマップは、次に、同じMIDアルゴリズム及びしきい値を使用してぶれ補正され、物体のバイナリセグメンテーションmkが得られる。線形システムは良設定であるので、アルファマップのぶれ補正によって、真の前景セグメンテーションの厳密な解が与えられる。しかしながら、単純なしきい値処理では、セグメンテーションマスクは正確なものとはならず、これを改良する必要がある。
【0104】
動きライン毎のセグメンテーションを独立して精緻化する(670)。一実施の形態では、例えば0.65といった控え目なしきい値を使用して、物体のサイズよりも小さな初期セグメンテーションマスクm0を得る。各動きラインに対して、同時に各辺で1ピクセル、セグメンテーションマスクを拡大し、最良の推定値を見つける。最良の推定値は、結合コスト関数
【0105】
【数28】
【0106】
を最小にするものである。
【0107】
精緻化は、ぶれ領域全体に繰り返され、動きライン毎のエラーを最小にする最良のセグメンテーションが選ばれる。通常、各辺において10ピクセル内で検索を行い、その結果、拡張は走査ライン毎に102=100個になる。通常、セグメンテーション及びぶれ補正の質は、最初の繰り返しの後であっても改善する。精緻化は、最終結果を得るために2回又は3回反復される。
【0108】
本発明を、好ましい実施の形態の例として説明してきたが、本発明の精神及び範囲内で他のさまざまな適合及び変更を行えることが理解されるべきである。したがって、本発明の真の精神及び範囲内に入るようなこのようなすべての変形及び変更を包含することが、添付の特許請求の範囲の目的である。
【技術分野】
【0001】
本発明は、包括的には、画像処理に関し、より詳細には、移動物体から取得された画像の動きぶれの影響を除去することに関する。
【背景技術】
【0002】
動きぶれは、画像が取得されている間のカメラとシーンとの間の相対的な動きに起因して生じる。その動きが少なくとも局所的にシフト不変であり、且つ、ぶれを引き起こした、点像分布関数(PSF)としても知られているぶれ関数が判明している場合には、動きぶれのある画像は、画像逆畳み込みによって、喪失した空間周波数に至るまで復元することができる。
【0003】
反転可能な(invertible:可逆的な)動きPSFを保持することは、従来の画像では可能ではない。有限の露出時間によるボックス関数は、ローパスフィルタを有する畳み込みに対応し、したがって、PSFの周波数変換はゼロ(ヌル)を含む。PSFのヌルに対応する周波数は失われ、これによって、ぶれ補正は効果がなくなる。従来の方法は、特殊化されたカメラを使用してPSFを求める。
【0004】
例えば、1つの従来の方法は、広帯域バイナリコードを使用して、露出時間の間シャッタを開閉する。広帯域コードには、周波数領域にヌルがなく、それにより、その結果生成されるPSFは反転可能となる。しかしながら、その方法は、特殊化されたハードウェアを必要とし、一定背景を前提としており、また、手動によるPSF推定及び物体セグメンテーションを必要とする。
【0005】
動き不変画像化手法(motion invariant imaging method)は、画像を取得しながら一定の加速度でカメラを移動させる。キーとなるアイデアは、一定の範囲内で動きPSFを物体の速度に対して不変とすることである。これによって、セグメンテーション及びPSF推定が不要になる。しかしながら、その方法では、動きの方向を事前に知っている必要があり、遮蔽背景(occluding background)に起因して物体境界にアーティファクトが作成され、シーンの静止部分にもぶれが危うく導入される。
【0006】
波面符号化方法は、レンズの前に立方相板を使用して、PSFをシーンの深さに対して不変とする。しかしながら、その方法の結果、当初焦点が合っていたシーンの部分に焦点ずれのぶれが生じることになる。
【0007】
別の方法は、広帯域バイナリ符号でカメラのシャッタを開閉して、PSFを反転可能にする。カメラの動きを加速することにより、静止部分にぶれが生じるという代償を払って、動きPSFは物体の速度に対して不変となる。
【0008】
従来の民生用カメラは、慣性センサによって制御された適応光学素子を使用して画像安定化を行い、カメラの動きを補償する。
【0009】
ハイブリッドカメラは、補助低解像度高フレームレートを使用してPSFを推定するハイブリッド画像化システムを使用して、高解像度1次センサ画像のぶれを補正する。しかしながら、その方法は、PSF推定用の補助カメラを必要とする。
【0010】
動きPSFは、PSF推定用の短い露出及び推定されたPSFを使用した画像ぶれ補正用の長い露出の2つの異なる露出を有する連続画像からの部分情報を組み合わせることによって推定されていた。しかしながら、短い露出で画像を取得するには、特殊なカメラが必要とされる。
【0011】
重なり合った露出時間及び再構成可能なマルチカメラアレイを有する複数の定位置カメラも、取得画像の時間解像度を増加させるのに使用されてきた。しかしながら、PSF反転用に単一の従来のカメラを使用することが望まれている。
【0012】
したがって、たとえ各画像のPSFがぶれに起因して反転不能であり、画像が単一の従来のカメラによって取得されても、シーンのぶれを補正することが望まれている。
【発明の概要】
【発明が解決しようとする課題】
【0013】
たとえ各画像の点像分布関数(PSF)がぶれに起因して反転不能であっても、画像のセットにおける動きぶれを反転することが、主題発明の目的である。
【課題を解決するための手段】
【0014】
ぶれのある画像は、PSFの周波数変換においてヌル(ゼロ)を示し、これによって、逆畳み込みは不良設定になる。この問題を回避するハードウェアの解決法では、符号化露出カメラ又は加速度モーションセンサ等の特殊化されたデバイスを必要とする。従来のビデオカメラが使用され、複数のPSFのヌル充填(null-filling)及びジョイント反転可能性(joint invertability)の考えが導入される。キーとなる実現は、変化するPSFでシーンの画像のセットを取得し、その結果、或る画像の周波数成分におけるヌルを他の画像が充填できるというものである。結合された周波数変換は、ヌルがなく、ぶれ補正を良設定にする。
【0015】
本発明の実施の形態は、シーンの画像のぶれを低減するための方法を説明する。まず、シーンの画像のセットを取得する。画像のセットにおける各画像は、関連のぶれと、点像分布関関数(PSF)のセットを形成する点像分布関数(PSF)とを有する物体を含み、PSFのセットは、ヌル充填演算に一緒に適合している。次に、画像のセット及びPSFのセットを一緒に反転し、低減されたぶれを有する出力画像を生成する。
【図面の簡単な説明】
【0016】
【図1】本発明の実施の形態によるマルチ画像ぶれ補正のための方法のブロック図である。
【図2】本発明の実施の形態による不良設定の点像分布関数(PSF)の模式図である。
【図3】本発明の実施の形態によるPSFヌル充填の模式図である。
【図4】本発明の実施の形態による単一画像ぶれ補正のブロック図である。
【図5】本発明の実施の形態によるマルチ画像ぶれ補正のための結合線形システムのブロック図である。
【図6】本発明の実施の形態による自動ぶれ補正のための方法のブロック図である。
【発明を実施するための形態】
【0017】
図1は、本発明の実施の形態によるシーンの画像のセット110のマルチ画像ぶれ補正の方法100を示す。各画像111〜113は、点像分布関数(PSF)121〜123のセット120に関連付けられたぶれを有する物体を含む。この方法は、PSFのセットを使用して画像のセットを一緒に反転し(140)、ぶれが低減された出力画像150を生成する。この方法のステップは、プロセッサ101によって実行される。
【0018】
画像110は、PSFのセットがヌル充填演算130に適合するようなカメラによって取得される。適合性は、異なる露出時間で画像を取得することによって達成される。
【0019】
例えば、一実施の形態では、第1の画像111が、第1の露出時間で取得され、第2の画像112が、第1の露出時間の整数倍でない第2の露出時間で取得される。いくつかの実施の形態では、自動段階露出(AEB)を有する従来のカメラを使用する。AEBによって、カメラは、異なる露出で一連の画像を撮影することが可能になる。
【0020】
図2に示すように、従来の露出を有するカメラによって取得された単一の画像111について、動きPSFはボックスフィルタ220である。PSFの離散フーリエ変換(DFT)230は、カーディナルサイン(sinc)関数240である。カーディナルサイン(sinc)関数240は、ゼロ250を含み、したがって、ぶれ補正を不良設定にする。PSFのセット120は、第1のPSF121及び第2のPSF122を含む。特定の周波数250における第1のPSFの値はゼロに等しい。特定の周波数における第2のPSFの値は、ゼロに等しくない。
【0021】
本発明の実施の形態は、PSFヌル充填の新規な概念を使用する。図3は、異なる露出時間320で取得された複数の画像110を結合することによって、各個々のPSFのヌル330が他のPSFからのデータで充填されることを示す。したがって、結合されたPSF340は、ぶれ補正140を良条件にする。
【0022】
反転不能PSFのジョイント反転可能性
fを、物体を含むシーンの鮮明な画像を表すものとする。物体のN個のぶれのある画像ikを撮影する。各画像ikは、PSFのセットを形成する異なるPSF hkを有する。
【0023】
【数1】
【0024】
ここで、*は畳み込み演算子であり、nkは、分散σ2kを有するゼロ平均加法的白色ガウス雑音である。Tkを、k番目の画像の露出時間とする。量のフーリエ変換を、大文字を使用して表すことにする。wを周波数とすると、画像I(w)のフーリエ変換F(w)は、
【0025】
【数2】
【0026】
である。
【0027】
1次元の物体の動きが、等速でセンサ面に対して平行である場合、PSFのそれぞれは、ボックスフィルタの長さ225が露出時間Tkに比例するボックスフィルタ220に対応する。rkを、k番目のフレームにおけるぶれのサイズとする。このとき、
【0028】
【数3】
【0029】
である。
【0030】
あらゆる個々の画像の単一画像ぶれ補正(SID)は、
【0031】
【数4】
【0032】
である。ここで、F(w)は、ぶれ補正された画像のフーリエ変換を表し、
【0033】
【数5】
【0034】
は、対応する逆畳み込みフィルタvkのフーリエ変換である。
【0035】
図3は、例えばN個の画像110を使用するマルチ画像ぶれ補正(MID)のための方法を示す。好ましい実施の形態では、各周波数wにおいて、
【0036】
【数6】
【0037】
によってぶれ補正された出力画像の雑音電力を最小にすることにより、最適な逆畳み込みフィルタVk(w)が得られる。鮮明な画像を再生するために、
【0038】
【数7】
【0039】
であることに留意されたい。
【0040】
ラグランジュ乗数を使用すると、コスト関数は、
【0041】
【数8】
【0042】
であり、したがって、
【0043】
【数9】
【0044】
である。
【0045】
特定の周波数w 350においてすべてのPSF 330間で共通のゼロがある場合、その周波数におけるすべてのkについてHk(w)=0であり、V(w)は不安定になる。
【0046】
PSFのフーリエ変換において共通のゼロがない場合、各個々の画像で失われた情報は、他の或る画像によって取得される。各個々のPSFにおけるゼロは、他のPSFによって充填される。
【0047】
このように、PSFのセットが共通のゼロを有しない場合、たとえ各PSFが反転不能であっても、結合された逆畳み込みを良設定にすることができる。すなわち、PSFのセットは、ヌル充填に適合している。
【0048】
一実施の形態では、PSFは動きPSFである。しかしながら、他のタイプのPSFが本実施の形態では使用される。動きPSFの場合、これによって、露出時間が互いの整数倍になるべきでないことが必要とされる。
【0049】
【数10】
【0050】
は、結合された逆畳み込みの演算子である。
【0051】
マルチ画像ぶれ補正
動きぶれを、鮮明な画像によって乗算される動きスミア行列(motion smear matrix)として定式化する。図4に示すように、単一画像ぶれ補正(SID)の場合、画像111〜113は、動きスミア行列411〜413に鮮明な画像150を乗算することで再生される。しかしながら、動きスミア行列はPSFによって決まるので、PSFが悪条件である場合、ぶれ補正は満足できるものではない。
【0052】
図5は、マルチ画像ぶれ補正(MID)の結合線形システムを示す。この結合線形システムでは、行列510と画像520とを結合する。動きぶれ行列の特異値は、結合ぶれ補正システムAcがより良い条件であることを示す。
【0053】
離散領域における畳み込み式は、各動きラインに対して
【0054】
【数11】
【0055】
である。ここで、Akは、画像kについての巡回動きスミア行列であり、
【0056】
【数12】
【0057】
は、ぶれのある物体を記述するベクトルであり、
【0058】
【数13】
【0059】
は、鮮明な物体を記述するベクトルであり、
【0060】
【数14】
【0061】
は、各動きラインに沿った雑音強度を記述するベクトルである。SIDの場合、ぶれ補正された物体を記述するベクトル
【0062】
【数15】
【0063】
は、コスト関数
【0064】
【数16】
【0065】
を最小にすることによって得られ、その結果、
【0066】
【数17】
【0067】
となる。
【0068】
同様に、MIDの場合、結合線形式は、
【0069】
【数18】
【0070】
である。式(9)において、Acは、結合共分散行列(combined covariance matrix)であり、
【0071】
【数19】
【0072】
は、雑音分散である。
【0073】
いくつかの実施の形態では、推定されたぶれ補正済みベクトル
【0074】
【数20】
【0075】
は、コスト関数
【0076】
【数21】
【0077】
を最小にすることによって
【0078】
【数22】
【0079】
として得られる。
【0080】
したがって、式(10)を使用して画像のセット及びPSFのセットを一緒に反転すると、ぶれが低減された出力画像が生成される。
【0081】
露出シーケンスの最適化
一実施の形態では、結合された演算子Pの最小値を最大にする露出時間を検索する。別の実施の形態では、信号依存性雑音を考慮するためにセンサ雑音特性を組み込む。光子によって生成された電子の分散は、測定された信号と共に線形に増加するので、露出時間σ2kは、σ2gray+βTkによって与えられる。ここで、σ2grayは暗雑音であり、βはカメラ依存性定数である。
【0082】
これらのパラメータを使用すると、nfによって与えられる信号対雑音比(SNR)の減少を最小にすることにより、最適な露出シーケンスが得られる。符号化露出の場合、検索空間は、ほぼ2n程度である。ここで、nは符号長であり、例えば52である。MIDの未知のものの数は、使用される異なる露出時間の数に等しい。通常、ぶれ補正には、3つ又は4つの異なる露出時間で十分であり、したがって、検索は比較的小規模である。
【0083】
自動ぶれ補正
図6は、自動ぶれ補正方法のブロック図を示す。本発明の実施の形態は、平滑でない背景の前面で移動する物体を有する画像610をぶれ補正するためのジョイントPSF反転可能性を使用する。
【0084】
PSF推定
空間的に不変のぶれの場合、PSF推定620は、画像空間物体速度vと画像毎の露出時間との乗算として表される。物体速度は、画像間の動きベクトルと画像間の時間経過との間の比である。この空間的に不変のぶれの場合、画像間の動きベクトルは、対応する画像パッチを照合することによって計算される。しかしながら、露出時間が異なると、その結果、ぶれのサイズが異なることになり、したがって、照合及びPSF推定を容易にするために、画像を取得するための露出シーケンスが繰り返される。したがって、画像のセット610における画像は、N個の画像ごとに同じ露出を有する。ここで、Nは、使用される異なる露出の数(≒3〜4)である。動きベクトルは、同じ露出を使用して取得された画像を照合することによって計算することができる。異なる露出についての動きベクトルを平均化することによって、PSFの最終推定値が与えられる。
【0085】
初期化
EQ m\s\do5(k)(x\,y)は、k番目の画像における物体のバイナリマスクであり、Tiはフレーム間時間である。b(x,y)が、物体を伴わない背景画像である場合、取得された動きぶれのある画像ikは、
【0086】
【数23】
【0087】
によって与えられる。
【0088】
最初に、背景bを推定する。いくつかの実施の形態では、物体は、十分高速に移動する。すなわち、各背景ピクセルは、画像の50%未満において物体により遮蔽される。したがって、時間方向に沿ったメディアンフィルタリングを使用する。低速の移動物体の場合、背景差分を使用して背景bが求められる。
【0089】
ぶれのある画像は、ぶれのある前景及び背景の双方からの寄与を有する。画像ぶれの式(17)は、アルファマッティング(alpha matting)式の点から
【0090】
【数24】
【0091】
として、記述することができる。ここで、
【0092】
【数25】
【0093】
であり、αk=hk*mkである。アルファマップのぶれ補正は、バイナリセグメンテーションマスクmkを再生することができる。マッティングは、通常、透明な静止物体に使用され、前景の動きぶれのある物体は、不透明であり、鮮明に合焦されているものと仮定する。したがって、アルファマップは、動きぶれにのみ依存し、マッティング前景は、実際には、ぶれのある物体に対応し、鮮明な物体には対応しない。
【0094】
初期アルファマップ630を計算するために、まず、入力画像ikと背景画像bとの間の差分をしきい値処理することによって、画像毎の粗いトライマップ(crude trimap)を生成する。このトライマップは、移動物体の内部の場合は1であり、背景の場合は0であり、ぶれのある領域の場合は不明である。ホール充填(hole-filling)等のモルフォロジー演算を適用して、雑音が低減される。トライマップを使用すると、アルファマッティングは、各フレームに対して独立に実行される。
【0095】
ぶれのある前景fbkは、各入力画像からの背景寄与を除去する(640)ことによって、
【0096】
【数26】
【0097】
として得られる。
【0098】
空間的に不変の動きぶれの場合、アルファマップは、各動きラインに沿った勾配であり、雑音を有する。
【0099】
マルチ画像ぶれ補正(MID)
物体は、連続した画像では異なる位置に現れるので、ぶれのある前景fbkは、逆畳み込みの前に位置合わせする必要がある。直線的な一定の動きの場合、位置合わせは、画像平面におけるシフトに対応する。物体は物体速度vを有するので、i番目の画像と(i+1)番目の画像との間のシフトはv*Tiである。ぶれのある前景を位置合わせした後、式(10)を解くことによりMID650を使用してぶれ補正が実行される。雑音を有するアルファマップに起因して、ぶれのある画像のこの初期推定値は、雑音を有し、エラーのある背景寄与を含む。
【0100】
精緻化
動きは、実世界のシーンでは一定条件でない場合があるので、前のステップにおける前景レイヤの位置合わせは、わずかにずれている可能性がある。位置合わせミスは、逆畳み込みでエラーを引き起こす。前のステップで得られた、ぶれ補正された前景fを使用して、位置合わせを精緻化する(660)。具体的には、ブラーカーネル(blur kernel)hkを使用して鮮明な前景fにぶれを起こし、ぶれのある合成前景とfbkとの間のシフトを検出する。したがって、すべてのぶれのある前景fbksは、鮮明な前景fを通じて相関され、正確に位置合わせすることができる。
【0101】
セグメンテーションの精緻化
ぶれ補正された前景fを使用すると、精緻化されたアルファマップは、
【0102】
【数27】
【0103】
として計算される。得られたアルファマップは、次に、同じMIDアルゴリズム及びしきい値を使用してぶれ補正され、物体のバイナリセグメンテーションmkが得られる。線形システムは良設定であるので、アルファマップのぶれ補正によって、真の前景セグメンテーションの厳密な解が与えられる。しかしながら、単純なしきい値処理では、セグメンテーションマスクは正確なものとはならず、これを改良する必要がある。
【0104】
動きライン毎のセグメンテーションを独立して精緻化する(670)。一実施の形態では、例えば0.65といった控え目なしきい値を使用して、物体のサイズよりも小さな初期セグメンテーションマスクm0を得る。各動きラインに対して、同時に各辺で1ピクセル、セグメンテーションマスクを拡大し、最良の推定値を見つける。最良の推定値は、結合コスト関数
【0105】
【数28】
【0106】
を最小にするものである。
【0107】
精緻化は、ぶれ領域全体に繰り返され、動きライン毎のエラーを最小にする最良のセグメンテーションが選ばれる。通常、各辺において10ピクセル内で検索を行い、その結果、拡張は走査ライン毎に102=100個になる。通常、セグメンテーション及びぶれ補正の質は、最初の繰り返しの後であっても改善する。精緻化は、最終結果を得るために2回又は3回反復される。
【0108】
本発明を、好ましい実施の形態の例として説明してきたが、本発明の精神及び範囲内で他のさまざまな適合及び変更を行えることが理解されるべきである。したがって、本発明の真の精神及び範囲内に入るようなこのようなすべての変形及び変更を包含することが、添付の特許請求の範囲の目的である。
【特許請求の範囲】
【請求項1】
シーンの画像のぶれを低減するための方法であって、該方法のステップを実行するためのプロセッサを備え、該方法は、
前記シーンの画像のセットを取得するステップであって、前記画像のセットにおける各画像は、点像分布関関数(PSF)のセットを形成する点像分布関数(PSF)に関連付けられたぶれを有する物体を含み、前記PSFのセットは、ヌル充填演算に適合している、ステップ、並びに
前記画像のセット及び前記PSFのセットを一緒に反転するステップであって、低減されたぶれを有する出力画像を生成する、ステップ、
を含む、方法。
【請求項2】
互いの非整数倍である露出時間で前記画像のセットを取得することをさらに含む、請求項1に記載の方法。
【請求項3】
前記PSFのセットは、第1のPSF及び第2のPSFを含み、特定の周波数における前記第1のPSFはゼロであり、前記特定の周波数における前記第2のPSFはゼロでない、請求項1に記載の方法。
【請求項4】
単一のカメラで前記画像のセットを取得することをさらに含む、請求項1に記載の方法。
【請求項5】
異なるフレームレートで動作する複数のカメラを使用して、前記画像のセットを取得することをさらに含む、請求項1に記載の方法。
【請求項6】
前記PSFは動きPSFである、請求項1に記載の方法。
【請求項7】
前記反転することは、
【数1】
に従って前記出力画像を求めること、
をさらに含み、ここで、
【数2】
は、前記出力画像を記述するベクトルであり、Akは、画像kについての巡回動きスミア行列であり、
【数3】
は、前記ぶれのある物体を記述するベクトルであり、Nは、前記画像のセットにおける画像の数であり、Tは転置演算子である、請求項1に記載の方法。
【請求項8】
逆畳み込み演算子が最大になるような前記露出時間を求めることをさらに含む、請求項2に記載の方法。
【請求項9】
信号対雑音比が最大になるような前記露出時間を求めることをさらに含む、請求項2に記載の方法。
【請求項10】
画像のぶれを低減するための方法であって、該方法のステップを実行するためのプロセッサを備え、該方法は、
露出のセットで移動物体の画像のセットを繰り返し取得するステップであって、前記露出は互いの非整数倍である、ステップ、
同じ露出で取得された画像から計算された動きベクトルを使用して、点像分布関数(PSF)のセットを形成する点像分布関数(PSF)を推定するステップ、
前記画像のセットにおける画像毎のアルファマップを求めるステップ、
前記アルファマップを使用して、前記画像から背景寄与を除去するステップ、並びに
前記画像のセット及び前記PSFのセットを一緒に反転するステップであって、低減されたぶれを有する出力画像を生成する、ステップ、
を含む、方法。
【請求項11】
前記求めること、前記除去すること、及び前記反転することを繰り返すことをさらに含む、請求項10に記載の方法。
【請求項12】
前記取得することは、自動段階露出を有するカメラを使用して実行される、請求項10に記載の方法。
【請求項13】
画像毎に、
前記画像の背景を推定すること、及び
前記画像と前記背景との間の差分をしきい値処理することによって粗いトライマップを生成すること、
をさらに含む、請求項10に記載の方法。
【請求項14】
前記画像のセットにおいて前記物体を位置合わせすることをさらに含む、請求項10に記載の方法。
【請求項15】
各動きラインに対して前記物体のセグメンテーションを独立に精緻化すること、
をさらに含む、請求項10に記載の方法。
【請求項16】
画像のぶれを低減するように構成されたカメラであって、
移動物体の画像のセットを取得する手段であって、各画像は、点像分布関関数(PSF)のセットを形成する点像分布関数(PSF)に関連付けられており、前記PSFのセットは、ヌル充填演算に適合している、取得する手段、並びに
前記画像のセット及び前記PSFのセットを一緒に反転する手段であって、低減されたぶれを有する出力画像を生成する、反転する手段、
を備える、カメラ。
【請求項17】
前記PSFのセットは、第1のPSF及び第2のPSFを含み、特定の周波数における前記第1のPSFはゼロであり、前記特定の周波数における前記第2のPSFはゼロでない、請求項16に記載のカメラ。
【請求項18】
前記反転する手段は、
【数4】
に従って前記出力画像を求める手段、
をさらに備え、ここで、
【数5】
は、前記出力画像を記述するベクトルであり、Akは、画像kについての巡回動きスミア行列であり、
【数6】
は、前記ぶれのある物体を記述するベクトルであり、Nは、前記画像のセットにおける画像の数であり、Tは転置演算子である、
請求項16に記載のカメラ。
【請求項19】
前記PSFのセットを推定する手段をさらに備える、請求項16に記載のカメラ。
【請求項20】
前記画像のセットを分割する手段をさらに備える、請求項16に記載のカメラ。
【請求項1】
シーンの画像のぶれを低減するための方法であって、該方法のステップを実行するためのプロセッサを備え、該方法は、
前記シーンの画像のセットを取得するステップであって、前記画像のセットにおける各画像は、点像分布関関数(PSF)のセットを形成する点像分布関数(PSF)に関連付けられたぶれを有する物体を含み、前記PSFのセットは、ヌル充填演算に適合している、ステップ、並びに
前記画像のセット及び前記PSFのセットを一緒に反転するステップであって、低減されたぶれを有する出力画像を生成する、ステップ、
を含む、方法。
【請求項2】
互いの非整数倍である露出時間で前記画像のセットを取得することをさらに含む、請求項1に記載の方法。
【請求項3】
前記PSFのセットは、第1のPSF及び第2のPSFを含み、特定の周波数における前記第1のPSFはゼロであり、前記特定の周波数における前記第2のPSFはゼロでない、請求項1に記載の方法。
【請求項4】
単一のカメラで前記画像のセットを取得することをさらに含む、請求項1に記載の方法。
【請求項5】
異なるフレームレートで動作する複数のカメラを使用して、前記画像のセットを取得することをさらに含む、請求項1に記載の方法。
【請求項6】
前記PSFは動きPSFである、請求項1に記載の方法。
【請求項7】
前記反転することは、
【数1】
に従って前記出力画像を求めること、
をさらに含み、ここで、
【数2】
は、前記出力画像を記述するベクトルであり、Akは、画像kについての巡回動きスミア行列であり、
【数3】
は、前記ぶれのある物体を記述するベクトルであり、Nは、前記画像のセットにおける画像の数であり、Tは転置演算子である、請求項1に記載の方法。
【請求項8】
逆畳み込み演算子が最大になるような前記露出時間を求めることをさらに含む、請求項2に記載の方法。
【請求項9】
信号対雑音比が最大になるような前記露出時間を求めることをさらに含む、請求項2に記載の方法。
【請求項10】
画像のぶれを低減するための方法であって、該方法のステップを実行するためのプロセッサを備え、該方法は、
露出のセットで移動物体の画像のセットを繰り返し取得するステップであって、前記露出は互いの非整数倍である、ステップ、
同じ露出で取得された画像から計算された動きベクトルを使用して、点像分布関数(PSF)のセットを形成する点像分布関数(PSF)を推定するステップ、
前記画像のセットにおける画像毎のアルファマップを求めるステップ、
前記アルファマップを使用して、前記画像から背景寄与を除去するステップ、並びに
前記画像のセット及び前記PSFのセットを一緒に反転するステップであって、低減されたぶれを有する出力画像を生成する、ステップ、
を含む、方法。
【請求項11】
前記求めること、前記除去すること、及び前記反転することを繰り返すことをさらに含む、請求項10に記載の方法。
【請求項12】
前記取得することは、自動段階露出を有するカメラを使用して実行される、請求項10に記載の方法。
【請求項13】
画像毎に、
前記画像の背景を推定すること、及び
前記画像と前記背景との間の差分をしきい値処理することによって粗いトライマップを生成すること、
をさらに含む、請求項10に記載の方法。
【請求項14】
前記画像のセットにおいて前記物体を位置合わせすることをさらに含む、請求項10に記載の方法。
【請求項15】
各動きラインに対して前記物体のセグメンテーションを独立に精緻化すること、
をさらに含む、請求項10に記載の方法。
【請求項16】
画像のぶれを低減するように構成されたカメラであって、
移動物体の画像のセットを取得する手段であって、各画像は、点像分布関関数(PSF)のセットを形成する点像分布関数(PSF)に関連付けられており、前記PSFのセットは、ヌル充填演算に適合している、取得する手段、並びに
前記画像のセット及び前記PSFのセットを一緒に反転する手段であって、低減されたぶれを有する出力画像を生成する、反転する手段、
を備える、カメラ。
【請求項17】
前記PSFのセットは、第1のPSF及び第2のPSFを含み、特定の周波数における前記第1のPSFはゼロであり、前記特定の周波数における前記第2のPSFはゼロでない、請求項16に記載のカメラ。
【請求項18】
前記反転する手段は、
【数4】
に従って前記出力画像を求める手段、
をさらに備え、ここで、
【数5】
は、前記出力画像を記述するベクトルであり、Akは、画像kについての巡回動きスミア行列であり、
【数6】
は、前記ぶれのある物体を記述するベクトルであり、Nは、前記画像のセットにおける画像の数であり、Tは転置演算子である、
請求項16に記載のカメラ。
【請求項19】
前記PSFのセットを推定する手段をさらに備える、請求項16に記載のカメラ。
【請求項20】
前記画像のセットを分割する手段をさらに備える、請求項16に記載のカメラ。
【図1】

【図2】
【図3】

【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2010−238234(P2010−238234A)
【公開日】平成22年10月21日(2010.10.21)
【国際特許分類】
【外国語出願】
【出願番号】特願2010−62824(P2010−62824)
【出願日】平成22年3月18日(2010.3.18)
【出願人】(597067574)ミツビシ・エレクトリック・リサーチ・ラボラトリーズ・インコーポレイテッド (484)
【住所又は居所原語表記】201 BROADWAY, CAMBRIDGE, MASSACHUSETTS 02139, U.S.A.
【Fターム(参考)】
【公開日】平成22年10月21日(2010.10.21)
【国際特許分類】
【出願番号】特願2010−62824(P2010−62824)
【出願日】平成22年3月18日(2010.3.18)
【出願人】(597067574)ミツビシ・エレクトリック・リサーチ・ラボラトリーズ・インコーポレイテッド (484)
【住所又は居所原語表記】201 BROADWAY, CAMBRIDGE, MASSACHUSETTS 02139, U.S.A.
【Fターム(参考)】
[ Back to top ]