
ジャイロセンサのドリフト抑制方法

【課題】ジャイロセンサのドリフトを大幅に抑制し、特に、MEMS技術を利用する振動型ジャイロセンサの計測精度を向上させる。
【解決手段】振動型ジャイロセンサ1のセンサ素子部4の検出軸方向を、ステッピングモータ7により回転軸8を介して周期的に反転させ、ジャイロセンサ出力を積分した後に、反転前の積分値と反転後の積分値の差分を演算することにより、ジャイロセンサの出力信号に含まれるドリフト成分を低減するようにした。
【解決手段】振動型ジャイロセンサ1のセンサ素子部4の検出軸方向を、ステッピングモータ7により回転軸8を介して周期的に反転させ、ジャイロセンサ出力を積分した後に、反転前の積分値と反転後の積分値の差分を演算することにより、ジャイロセンサの出力信号に含まれるドリフト成分を低減するようにした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ジャイロセンサのドリフト抑制方法に関し、特に、計測中においてセンサ出力に対して自己整合的にドリフトを抑制することが可能なジャイロセンサのドリフト抑制方法に関する。
【背景技術】
【0002】
ジャイロセンサは、物体の角速度を検出する計測器であり、検出した角速度を積分して角度を算出することもでき、航空機やロボットの自律航法をはじめ、カーナビゲーションの自走補正、自動運転システム、ロボット、カメラの手ぶれ補正等、広く利用されている。近年では、MEMS(micro electro mechanical systems)技術を応用して安価に製造できるようになってきたことから、航空機等の高精度用途を除いて、民生用としてMEMS技術を利用した小型の振動型ジャイロセンサが普及している。
【0003】
しかし、MEMSジャイロセンサは、小型且つ安価である反面、温度等の環境変化の影響を受け易くドリフトが発生し、航空機等の高精度用途に利用される光学式(光ファイバジャイロ、リングレーザジャイロ)に比べて精度が劣るという問題がある。特に、ジャイロセンサを利用して角度を算出する場合、角速度を積分して角度を算出するため、ドリフト成分が積分加算されて誤差として現れるため、MEMSジャイロセンサの精度を高めるには、ドリフトを低減することが要求される。
【0004】
従来、ジャイロセンサのドリフトを低減する方法として、例えば特許文献1に記載されたもの提案されている。特許文献1に記載された方法は、定常状態において、ジャイロセンサの出力電圧の零点からのずれ量に対応する電圧を補正電圧として予め記憶し、この記憶した補正電圧で計測時のジャイロセンサの出力電圧を補正することにより、ドリフト補正を行う。そして、記憶する補正電圧を、ジャイロセンサ出力をリセットする毎に更新するようにしている。
【特許文献1】特開平6−102046号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載した従来方法は、ジャイロセンサの定常時のセンサ出力のずれ量に基づいて補正電圧を設定して予め記憶させ、この記憶した補正電圧を用いて計測時のセンサ出力を補正する方法であるため、計測動作中の補正量が一定値であり、例えば計測時のドリフトの変化が予め予想したものと異なるような場合は、十分なドリフト補正が行えない虞れがある等、ドリフトの変化に対して柔軟な補正ができないという問題がある。
【0006】
本発明は上記問題点に着目してなされたもので、予め補正量を把握することなく計測動作中のセンサ出力値に基づいて自己整合的なドリフト補正を可能とするジャイロセンサのドリフト抑制方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
このため、本発明は、ジャイロセンサの出力に含まれるドリフト成分を低減するジャイロセンサのドリフト抑制方法であって、前記ジャイロセンサの出力極性を周期的に反転させ、反転前と反転後の出力値の差分を演算することを特徴とする。
かかる構成では、計測動作中において、出力極性の反転前と反転後の各出力値が得られる毎に反転前の出力値と反転後の出力値の差分を演算することで、ドリフトの低減処理が行われるようになる。これにより、計測時間に比例して増大するドリフト量が抑制されるようになる。
【0008】
請求項2のように、前記出力値を、ジャイロセンサの出力を積分処理した後の出力値とするとよい。
かかる構成では、ジャイロセンサの出力値を積分して角度を算出する場合に、角度算出システムにおけるシステムノイズが平均化され、交流雑音の影響を抑制できるようになる。
【0009】
請求項3のように、前記出力極性の反転は、ジャイロセンサの検出軸方向を機械的に反転させて行う構成とする。この場合、請求項4のように、前記ジャイロセンサがセンサ素子を励振させる振動型である場合、2つのジャイロセンサの前記検出軸方向の反転の位相を互いに半周期ずらし、それぞれのジャイロセンサの回転期間中の出力データを、回転していない他方のジャイロセンサ側の出力データで補間するようにするとよい。
請求項4の構成では、角速度測定ができないセンサ回転期間中でも、他方のセンサによって角速度測定が可能であり、角速度測定を実質的に連続して行えるようになる。
【0010】
請求項5のように、前記ジャイロセンサがセンサ素子を励振させる振動型である場合、前記出力極性の反転は、前記センサ素子に印加する励振信号の極性を切替えて行うようにしてもよい。
【0011】
請求項1〜3のいずれか1つに記載の発明において、請求項6のように、前記ジャイロセンサを、光ファイバジャイロセンサとすることを特徴とする。
かかる構成では、光ファイバジャイロセンサは、加速度に感度を持たないため、検出軸方向を機械的に反転させても回転の影響を受けないので、1つの光ファイバジャイロセンサを連続回転させることで連続的に角速度を計測することができるようになる。
請求項7のように、加速度センサ又は磁気センサに適用してもよい。
【発明の効果】
【0012】
本発明のジャイロセンサのドリフト抑制方法によれば、ジャイロセンサの出力極性を周期的に反転させ、反転前と反転後の各出力の差分を演算することで、ドリフト成分を減衰するようにした。これにより、ジャイロセンサのドリフト成分を大幅に減少することができると共に、オフセット成分も零にできるので、MEMS技術を用いて製造する振動型ジャイロセンサの計測精度を格段に向上できる。また、測定動作中に自己整合的にドリフト成分を減少できるので、予め補正量を把握する必要がなく、計測前に補正量を把握するための操作を不要にできる。
【発明を実施するための最良の形態】
【0013】
以下、本発明の実施形態を図面に基づいて説明する。
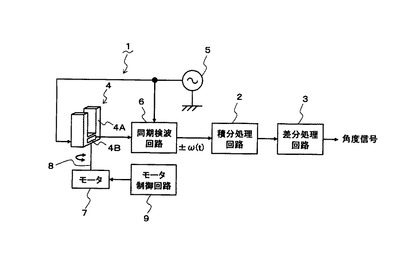
図1は、本発明に係るジャイロセンサのドリフト抑制方法の第1実施形態を適用した角度検出回路の概略構成図である。
図1において、本実施形態のドリフト抑制方法は、ジャイロセンサ1の検出軸方向を周期的に機械的に反転させることによりジャイロセンサ1の出力極性を周期的に反転させ、ジャイロセンサから得られる反転前の角速度信号と反転後の角速度信号を積分した後に、反転前の積分値と反転後の積分値の差分を演算することにより、ドリフトを低減する方法である。
【0014】
このドリフト抑制方法を適用した図1に示す角度検出回路は、角速度を検出するジャイロセンサ1と、積分処理回路2と、差分処理回路3とを備える。
ジャイロセンサ1は、例えばMEMS技術を利用して製造した振動型のもので、センサ素子部4と、駆動電源5と、同期検波回路6を備える。
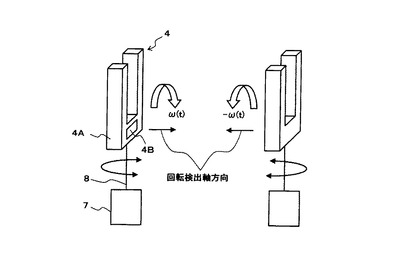
センサ素子部4は、例えば圧電セラミックス素子からなり交流駆動電源5からの交流励振信号により振動する音叉型の振動子4Aと、振動子4Aに外部から回転力が加わった時にその振動方向に対して垂直方向に発生するコリオリの力に起因する振動子4Aの歪み量を電気信号に変換して検出する検出電極4Bとを備える。このセンサ素子部4を、例えばステッピングモータ7により回転軸8を介して機械的に回転可能に構成し、モータ制御回路9により前記ステッピングモータ7を、周期的に正逆半回転を繰返すよう駆動制御することにより、図2に示すように、センサ素子部4の検出軸方向を周期的に反転させる(180°回転させる)構成である。尚、センサ素子部4を機械的に反転させる機構は、モータに限らず、センサ素子部4を周期的に反転できる機構であればどのような構成でもよい。
【0015】
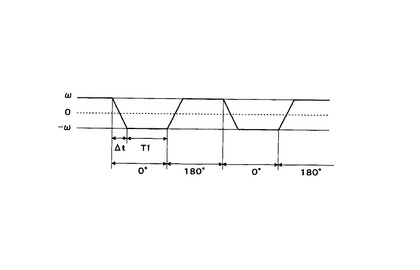
前記同期検波回路6は、センサ素子部4からの角速度信号と駆動電源5の励振信号を乗算して回転方向に応じた角速度信号の極性判別を行って図3に示すように角速度信号ω(t)と−ω(t)を交互に出力する。尚、図3中のΔtはセンサ素子部4の反転動作期間(角速度計測不可の期間)を示し、T1は角速度測定期間(センサ素子部4が停止している期間)を示し、反転周期はT1+Δtである。
【0016】
積分処理回路2は、ジャイロセンサ1の同期検波回路6から交互に出力される角速度信号ω(t)と−ω(t)を、測定期間T1毎に積分するものである。
差分処理回路3は、積分して得られた反転前の角度信号と反転後の角度信号との差分を一周期毎に演算し、この演算値を角速度計測終了時点まで加算処理して検出対象物体の回転角度に対応する角度信号を出力するものである。
【0017】
次に、本実施形態のドリフト抑制方法によるドリフト抑制動作について説明する。
ジャイロセンサ1の振動子4Aに駆動電源5から励振信号を印加して振動子4Aを振動させる。この状態で、モータ制御回路9によりステッピングモータ7を周期的に正逆転制御し、図2に示すようにセンサ素子部4の検出軸方向を周期的に反転させる。これにより、同期検波回路6から、図3に示すように反転周期に対応して極性が反転した角速度信号ω(t)と−ω(t)が交互に発生する。積分処理回路2は、入力する角速度信号ω(t)と−ω(t)を測定期間T1毎に積分処理する。差分処理回路3は、それぞれ積分された反転前の角速度信号と極性が反転した反転後の角速度信号との差分を一周期毎に演算し、その演算値を角速度計測終了時点まで加算する。
【0018】
ここで、前記差分処理回路3における差分処理について詳述する。
差分処理回路3に入力する角速度信号ω(t)は、角速度に対応する信号成分と、誤差成分であるオフセット成分とドリフト成分とを含んでいる。図2に示すようにセンサ素子部4の検出軸方向を反転させると、信号成分については極性が反転するため符号が逆になる。従って、差分処理回路3で反転前の積分値と反転後の積分値の差分を演算すると、極性反転により符号が逆となっている信号成分については同符号となり、加算されることになる。尚、ジャイロセンサ出力には雑音成分も存在するが、ここでは説明を簡単にするため雑音成分はないものとして説明する。
【0019】
一方、オフセット成分とドリフト成分については、センサ素子部4の向きとは無関係であり、センサ素子部4の反転前と反転後でも符号はそのままである。このため、反転前の角速度信号と極性が反転した反転後の角速度信号との差分を演算した場合、オフセット成分とドリフト成分については減算されることになる。
【0020】
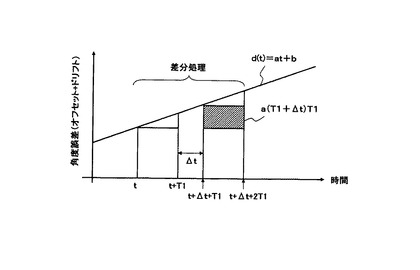
例えば、オフセット成分をb、時間に応じて変化するドリフト成分の変化係数をaとし、図4に示すようにオフセット成分とドリフト成分を含む誤差成分を時間の一次関数d(t)=at+bで近似した場合、センサ素子部4反転前の誤差成分d(t)の積分値(図4中のt〜t+T1の間の積分値)とセンサ素子部4反転後の誤差成分d(t)の積分値(図4中のt+Δt+T1〜t+Δt+2T1の間の積分値)の差分を演算すると、オフセット成分は相殺されて零となる。また、ドリフト成分については、差分処理1回当たりa(T1+Δt)T1(図4中の斜線部分に相当する)に減少する。
【0021】
ここで、前記近似式d(t)=at+bに基づいて、測定時間T後における角度誤差量を、センサ素子部4からの出力を周期的に反転させる本発明方法とセンサ素子部4の出力を反転させない場合とで比較すると、本発明方法による角度誤差量をDとすると、
D=a(T1+Δt)T ・・・(1)
となる。
一方、反転させない場合の角度誤差量をD′とすると、
D′=aT2/2+bT ・・・(2)
となる。
【0022】
(1)、(2)式から明らかなように、本発明方法によれば角度誤差量Dは、ドリフト成分が測定時間に比例して増加しているだけであるのに対して、反転させない場合の角度誤差量D′は、ドリフト成分が測定時間の2乗に比例し増加し、オフセット成分についても測定時間に比例して増加することがわかる。
【0023】
市販のジャイロセンサ(CRS038)を用いて角速度を検出し、10分後の角度ドリフト値の測定において、差分をとらない場合と本発明方法を適用した場合とでは、差分をとらない場合は8度であり、本発明方法の場合は約0.2度であった。これは光ファイバジャイロセンサに匹敵する値である。
【0024】
以上のように、本実施形態のジャイロセンサ1のドリフト抑制方法を用いれば、ジャイロセンサ1の出力極性を周期的に反転させ、反転前と反転後の積分値の差分を演算するので、極性反転する信号成分は加算処理され、極性反転に無関係なドリフト成分とオフセット成分についてのみ減衰処理が行われるようになる。これにより、ジャイロセンサ1を用いて角度を検出する際のドリフト量を、大幅に減少することができると共に、オフセット成分を零にできる。従って、MEMS技術を用いて製造する振動型ジャイロセンサの計測精度を従来と比較して格段に向上させることができる。更には、測定動作中に自己整合的にドリフト成分を減少させることができるので、予め補正量を把握する必要がなく、計測前に補正量を把握するための操作が不要になる。
【0025】
上記第1実施形態では、ジャイロセンサ1の出力極性を周期的に反転させる方法として、ジャイロセンサ1の検出軸方向を周期的に機械的に反転させる方法を用いたが、電気的にジャイロセンサ1の出力極性を反転させる方法でもよい。
【0026】
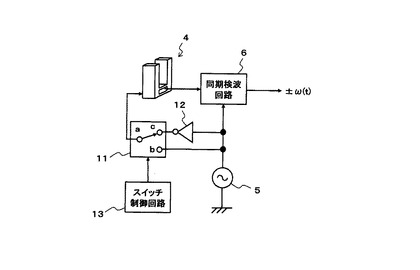
図5は、ジャイロセンサ1の出力極性を電気的に反転させるようにした本発明の第2実施形態の要部回路図である。尚、図1に示す第1実施形態と同一要素には同一符号を付して説明を省略する。
図5において、駆動電源5は、切換スイッチ11を介してセンサ素子部4に電気的に接続される。前記切換スイッチ11は、共通接点aと2つの切換接点b,cを有する。駆動電源5は、切換接点bには直接接続し、切換接点cにはNOT回路12を介して接続している。センサ素子部4は、共通接点aに接続している。スイッチ制御回路13は、切換スイッチ11を周期的に切換制御する。尚、ジャイロセンサ1の出力極性を電気的に切換える回路構成は、図5の回路に限らず、ジャイロセンサ1の出力極性を周期的に反転可能な回路構成であればよいことは言うまでもない。
【0027】
第2実施形態のジャイロセンサ1の出力極性の切換動作を説明する。
ジャイロセンサ1のセンサ素子部4に交流の励振信号を印加することは第1実施形態と同様である。この際、切換スイッチ11が切換接点cに接続している場合には、センサ素子部4に印加する励振信号の極性がNOT回路12によって反転される。従って、スイッチ制御回路13によって切換スイッチ11を周期的に切換えることで、切換スイッチ11の切換周期に応じてセンサ素子部4の出力極性が周期的に反転する。その後、積分処理回路2と差分処理回路3の各動作は第1実施形態と同様であるので、説明を省略する。
かかる第2実施形態によれば、センサ素子部4を回転させるよりも励振信号の極性切換が高速であるので、1台のセンサで角速度計測が連続してできる利点がある。
【0028】
本発明の第3実施形態について説明する。
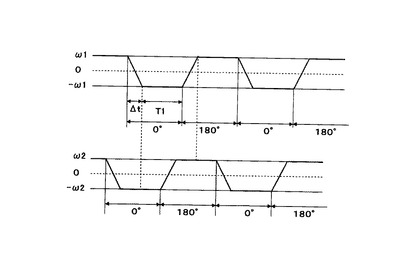
センサ素子部4を機械的に反転させる場合、回転中に角速度の計測ができない。この問題を解消するため、第3実施形態では、2つのジャイロセンサ1の各センサ素子部4,4の回転動作を互いに半周期ずらし、各センサ素子部4,4の検出軸方向の反転の位相を互いに半周期ずらすように構成する。具体的には、各センサ素子部4,4を回転駆動する各ステッピングモータ7,7の回転動作を互いに同期させて半周期ずらすように制御すればよい。
【0029】
これにより、2つのセンサ素子部4,4から、図6に示すような極性が交互に反転した角速度信号ω1,ω2が、互いに半周期ずれた状態で発生する。このため、一方のセンサ素子部が回転している期間Δtの間では、他方のセンサ素子部は測定期間T1であり、角速度が計測できる。従って、それぞれのジャイロセンサの回転期間中の出力データを、回転していない他方のジャイロセンサ側の出力データで補間することで、角速度を実質的に連続計測できるようになる。
【0030】
ゴニオステージの回転軸と2個のジャイロセンサの検出軸を一致させ、最大±4度の傾斜を与えた。各センサは、角速度を半分の時間しか計測しないので、ゴニオステージの傾斜角の測定値は2つのジャイロセンサの角度を加算する。2つのジャイロセンサの計測角度を加算した結果、最大傾斜角が±4度となりゴニオステージに与えた傾斜角と一致した。これにより、2つのジャイロセンサを用いることで連続して角速度及び角度を計測できることがわかる。
【0031】
上記の実施形態は、本発明を振動型ジャイロセンサに適用した例を示したが、光ファイバジャイロセンサにも適用できる。光ファイバジャイロセンサに適用した場合は、光ファイバジャイロセンサが加速度に感度を持たないため、検出軸方向を回転させる際の回転の影響を受けないので、1つの光ファイバジャイロセンサを連続回転させることで、角速度の連続計測が可能である。
【0032】
上記実施形態では、積分後の出力値の差分を演算するようにしたが、積分する前のジャイロセンサの出力値を差分演算してもよい。ただし、積分後に差分演算する方が、システムノイズが平均化され、交流雑音の影響が抑制できる利点がある。
【0033】
また、本発明方法は、ジャイロセンサの以外にも加速センサや磁気センサにも適用することが可能である。
【図面の簡単な説明】
【0034】
【図1】本発明に係るドリフト抑制方法の第1実施形態を適用した角度検出回路の概略構成図
【図2】センサ素子部の反転動作の説明図
【図3】図1のジャイロセンサの出力状態を示すタイムチャート
【図4】差分処理によるドリフト低減の説明図
【図5】本発明に係るドリフト抑制方法の第2実施形態の出力極性を電気的に反転させる回路例を示す図
【図6】本発明に係るドリフト抑制方法の第3実施形態における2つのジャイロセンサの出力状態を示すタイムチャート
【符号の説明】
【0035】
1 ジャイロセンサ
2 積分処理回路
3 差分処理回路
4 センサ素子部
5 駆動電源
7 ステッピングモータ
8 回転軸
9 モータ制御回路
11 切換スイッチ
12 NOT回路
13 スイッチ制御回路
【技術分野】
【0001】
本発明は、ジャイロセンサのドリフト抑制方法に関し、特に、計測中においてセンサ出力に対して自己整合的にドリフトを抑制することが可能なジャイロセンサのドリフト抑制方法に関する。
【背景技術】
【0002】
ジャイロセンサは、物体の角速度を検出する計測器であり、検出した角速度を積分して角度を算出することもでき、航空機やロボットの自律航法をはじめ、カーナビゲーションの自走補正、自動運転システム、ロボット、カメラの手ぶれ補正等、広く利用されている。近年では、MEMS(micro electro mechanical systems)技術を応用して安価に製造できるようになってきたことから、航空機等の高精度用途を除いて、民生用としてMEMS技術を利用した小型の振動型ジャイロセンサが普及している。
【0003】
しかし、MEMSジャイロセンサは、小型且つ安価である反面、温度等の環境変化の影響を受け易くドリフトが発生し、航空機等の高精度用途に利用される光学式(光ファイバジャイロ、リングレーザジャイロ)に比べて精度が劣るという問題がある。特に、ジャイロセンサを利用して角度を算出する場合、角速度を積分して角度を算出するため、ドリフト成分が積分加算されて誤差として現れるため、MEMSジャイロセンサの精度を高めるには、ドリフトを低減することが要求される。
【0004】
従来、ジャイロセンサのドリフトを低減する方法として、例えば特許文献1に記載されたもの提案されている。特許文献1に記載された方法は、定常状態において、ジャイロセンサの出力電圧の零点からのずれ量に対応する電圧を補正電圧として予め記憶し、この記憶した補正電圧で計測時のジャイロセンサの出力電圧を補正することにより、ドリフト補正を行う。そして、記憶する補正電圧を、ジャイロセンサ出力をリセットする毎に更新するようにしている。
【特許文献1】特開平6−102046号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載した従来方法は、ジャイロセンサの定常時のセンサ出力のずれ量に基づいて補正電圧を設定して予め記憶させ、この記憶した補正電圧を用いて計測時のセンサ出力を補正する方法であるため、計測動作中の補正量が一定値であり、例えば計測時のドリフトの変化が予め予想したものと異なるような場合は、十分なドリフト補正が行えない虞れがある等、ドリフトの変化に対して柔軟な補正ができないという問題がある。
【0006】
本発明は上記問題点に着目してなされたもので、予め補正量を把握することなく計測動作中のセンサ出力値に基づいて自己整合的なドリフト補正を可能とするジャイロセンサのドリフト抑制方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
このため、本発明は、ジャイロセンサの出力に含まれるドリフト成分を低減するジャイロセンサのドリフト抑制方法であって、前記ジャイロセンサの出力極性を周期的に反転させ、反転前と反転後の出力値の差分を演算することを特徴とする。
かかる構成では、計測動作中において、出力極性の反転前と反転後の各出力値が得られる毎に反転前の出力値と反転後の出力値の差分を演算することで、ドリフトの低減処理が行われるようになる。これにより、計測時間に比例して増大するドリフト量が抑制されるようになる。
【0008】
請求項2のように、前記出力値を、ジャイロセンサの出力を積分処理した後の出力値とするとよい。
かかる構成では、ジャイロセンサの出力値を積分して角度を算出する場合に、角度算出システムにおけるシステムノイズが平均化され、交流雑音の影響を抑制できるようになる。
【0009】
請求項3のように、前記出力極性の反転は、ジャイロセンサの検出軸方向を機械的に反転させて行う構成とする。この場合、請求項4のように、前記ジャイロセンサがセンサ素子を励振させる振動型である場合、2つのジャイロセンサの前記検出軸方向の反転の位相を互いに半周期ずらし、それぞれのジャイロセンサの回転期間中の出力データを、回転していない他方のジャイロセンサ側の出力データで補間するようにするとよい。
請求項4の構成では、角速度測定ができないセンサ回転期間中でも、他方のセンサによって角速度測定が可能であり、角速度測定を実質的に連続して行えるようになる。
【0010】
請求項5のように、前記ジャイロセンサがセンサ素子を励振させる振動型である場合、前記出力極性の反転は、前記センサ素子に印加する励振信号の極性を切替えて行うようにしてもよい。
【0011】
請求項1〜3のいずれか1つに記載の発明において、請求項6のように、前記ジャイロセンサを、光ファイバジャイロセンサとすることを特徴とする。
かかる構成では、光ファイバジャイロセンサは、加速度に感度を持たないため、検出軸方向を機械的に反転させても回転の影響を受けないので、1つの光ファイバジャイロセンサを連続回転させることで連続的に角速度を計測することができるようになる。
請求項7のように、加速度センサ又は磁気センサに適用してもよい。
【発明の効果】
【0012】
本発明のジャイロセンサのドリフト抑制方法によれば、ジャイロセンサの出力極性を周期的に反転させ、反転前と反転後の各出力の差分を演算することで、ドリフト成分を減衰するようにした。これにより、ジャイロセンサのドリフト成分を大幅に減少することができると共に、オフセット成分も零にできるので、MEMS技術を用いて製造する振動型ジャイロセンサの計測精度を格段に向上できる。また、測定動作中に自己整合的にドリフト成分を減少できるので、予め補正量を把握する必要がなく、計測前に補正量を把握するための操作を不要にできる。
【発明を実施するための最良の形態】
【0013】
以下、本発明の実施形態を図面に基づいて説明する。
図1は、本発明に係るジャイロセンサのドリフト抑制方法の第1実施形態を適用した角度検出回路の概略構成図である。
図1において、本実施形態のドリフト抑制方法は、ジャイロセンサ1の検出軸方向を周期的に機械的に反転させることによりジャイロセンサ1の出力極性を周期的に反転させ、ジャイロセンサから得られる反転前の角速度信号と反転後の角速度信号を積分した後に、反転前の積分値と反転後の積分値の差分を演算することにより、ドリフトを低減する方法である。
【0014】
このドリフト抑制方法を適用した図1に示す角度検出回路は、角速度を検出するジャイロセンサ1と、積分処理回路2と、差分処理回路3とを備える。
ジャイロセンサ1は、例えばMEMS技術を利用して製造した振動型のもので、センサ素子部4と、駆動電源5と、同期検波回路6を備える。
センサ素子部4は、例えば圧電セラミックス素子からなり交流駆動電源5からの交流励振信号により振動する音叉型の振動子4Aと、振動子4Aに外部から回転力が加わった時にその振動方向に対して垂直方向に発生するコリオリの力に起因する振動子4Aの歪み量を電気信号に変換して検出する検出電極4Bとを備える。このセンサ素子部4を、例えばステッピングモータ7により回転軸8を介して機械的に回転可能に構成し、モータ制御回路9により前記ステッピングモータ7を、周期的に正逆半回転を繰返すよう駆動制御することにより、図2に示すように、センサ素子部4の検出軸方向を周期的に反転させる(180°回転させる)構成である。尚、センサ素子部4を機械的に反転させる機構は、モータに限らず、センサ素子部4を周期的に反転できる機構であればどのような構成でもよい。
【0015】
前記同期検波回路6は、センサ素子部4からの角速度信号と駆動電源5の励振信号を乗算して回転方向に応じた角速度信号の極性判別を行って図3に示すように角速度信号ω(t)と−ω(t)を交互に出力する。尚、図3中のΔtはセンサ素子部4の反転動作期間(角速度計測不可の期間)を示し、T1は角速度測定期間(センサ素子部4が停止している期間)を示し、反転周期はT1+Δtである。
【0016】
積分処理回路2は、ジャイロセンサ1の同期検波回路6から交互に出力される角速度信号ω(t)と−ω(t)を、測定期間T1毎に積分するものである。
差分処理回路3は、積分して得られた反転前の角度信号と反転後の角度信号との差分を一周期毎に演算し、この演算値を角速度計測終了時点まで加算処理して検出対象物体の回転角度に対応する角度信号を出力するものである。
【0017】
次に、本実施形態のドリフト抑制方法によるドリフト抑制動作について説明する。
ジャイロセンサ1の振動子4Aに駆動電源5から励振信号を印加して振動子4Aを振動させる。この状態で、モータ制御回路9によりステッピングモータ7を周期的に正逆転制御し、図2に示すようにセンサ素子部4の検出軸方向を周期的に反転させる。これにより、同期検波回路6から、図3に示すように反転周期に対応して極性が反転した角速度信号ω(t)と−ω(t)が交互に発生する。積分処理回路2は、入力する角速度信号ω(t)と−ω(t)を測定期間T1毎に積分処理する。差分処理回路3は、それぞれ積分された反転前の角速度信号と極性が反転した反転後の角速度信号との差分を一周期毎に演算し、その演算値を角速度計測終了時点まで加算する。
【0018】
ここで、前記差分処理回路3における差分処理について詳述する。
差分処理回路3に入力する角速度信号ω(t)は、角速度に対応する信号成分と、誤差成分であるオフセット成分とドリフト成分とを含んでいる。図2に示すようにセンサ素子部4の検出軸方向を反転させると、信号成分については極性が反転するため符号が逆になる。従って、差分処理回路3で反転前の積分値と反転後の積分値の差分を演算すると、極性反転により符号が逆となっている信号成分については同符号となり、加算されることになる。尚、ジャイロセンサ出力には雑音成分も存在するが、ここでは説明を簡単にするため雑音成分はないものとして説明する。
【0019】
一方、オフセット成分とドリフト成分については、センサ素子部4の向きとは無関係であり、センサ素子部4の反転前と反転後でも符号はそのままである。このため、反転前の角速度信号と極性が反転した反転後の角速度信号との差分を演算した場合、オフセット成分とドリフト成分については減算されることになる。
【0020】
例えば、オフセット成分をb、時間に応じて変化するドリフト成分の変化係数をaとし、図4に示すようにオフセット成分とドリフト成分を含む誤差成分を時間の一次関数d(t)=at+bで近似した場合、センサ素子部4反転前の誤差成分d(t)の積分値(図4中のt〜t+T1の間の積分値)とセンサ素子部4反転後の誤差成分d(t)の積分値(図4中のt+Δt+T1〜t+Δt+2T1の間の積分値)の差分を演算すると、オフセット成分は相殺されて零となる。また、ドリフト成分については、差分処理1回当たりa(T1+Δt)T1(図4中の斜線部分に相当する)に減少する。
【0021】
ここで、前記近似式d(t)=at+bに基づいて、測定時間T後における角度誤差量を、センサ素子部4からの出力を周期的に反転させる本発明方法とセンサ素子部4の出力を反転させない場合とで比較すると、本発明方法による角度誤差量をDとすると、
D=a(T1+Δt)T ・・・(1)
となる。
一方、反転させない場合の角度誤差量をD′とすると、
D′=aT2/2+bT ・・・(2)
となる。
【0022】
(1)、(2)式から明らかなように、本発明方法によれば角度誤差量Dは、ドリフト成分が測定時間に比例して増加しているだけであるのに対して、反転させない場合の角度誤差量D′は、ドリフト成分が測定時間の2乗に比例し増加し、オフセット成分についても測定時間に比例して増加することがわかる。
【0023】
市販のジャイロセンサ(CRS038)を用いて角速度を検出し、10分後の角度ドリフト値の測定において、差分をとらない場合と本発明方法を適用した場合とでは、差分をとらない場合は8度であり、本発明方法の場合は約0.2度であった。これは光ファイバジャイロセンサに匹敵する値である。
【0024】
以上のように、本実施形態のジャイロセンサ1のドリフト抑制方法を用いれば、ジャイロセンサ1の出力極性を周期的に反転させ、反転前と反転後の積分値の差分を演算するので、極性反転する信号成分は加算処理され、極性反転に無関係なドリフト成分とオフセット成分についてのみ減衰処理が行われるようになる。これにより、ジャイロセンサ1を用いて角度を検出する際のドリフト量を、大幅に減少することができると共に、オフセット成分を零にできる。従って、MEMS技術を用いて製造する振動型ジャイロセンサの計測精度を従来と比較して格段に向上させることができる。更には、測定動作中に自己整合的にドリフト成分を減少させることができるので、予め補正量を把握する必要がなく、計測前に補正量を把握するための操作が不要になる。
【0025】
上記第1実施形態では、ジャイロセンサ1の出力極性を周期的に反転させる方法として、ジャイロセンサ1の検出軸方向を周期的に機械的に反転させる方法を用いたが、電気的にジャイロセンサ1の出力極性を反転させる方法でもよい。
【0026】
図5は、ジャイロセンサ1の出力極性を電気的に反転させるようにした本発明の第2実施形態の要部回路図である。尚、図1に示す第1実施形態と同一要素には同一符号を付して説明を省略する。
図5において、駆動電源5は、切換スイッチ11を介してセンサ素子部4に電気的に接続される。前記切換スイッチ11は、共通接点aと2つの切換接点b,cを有する。駆動電源5は、切換接点bには直接接続し、切換接点cにはNOT回路12を介して接続している。センサ素子部4は、共通接点aに接続している。スイッチ制御回路13は、切換スイッチ11を周期的に切換制御する。尚、ジャイロセンサ1の出力極性を電気的に切換える回路構成は、図5の回路に限らず、ジャイロセンサ1の出力極性を周期的に反転可能な回路構成であればよいことは言うまでもない。
【0027】
第2実施形態のジャイロセンサ1の出力極性の切換動作を説明する。
ジャイロセンサ1のセンサ素子部4に交流の励振信号を印加することは第1実施形態と同様である。この際、切換スイッチ11が切換接点cに接続している場合には、センサ素子部4に印加する励振信号の極性がNOT回路12によって反転される。従って、スイッチ制御回路13によって切換スイッチ11を周期的に切換えることで、切換スイッチ11の切換周期に応じてセンサ素子部4の出力極性が周期的に反転する。その後、積分処理回路2と差分処理回路3の各動作は第1実施形態と同様であるので、説明を省略する。
かかる第2実施形態によれば、センサ素子部4を回転させるよりも励振信号の極性切換が高速であるので、1台のセンサで角速度計測が連続してできる利点がある。
【0028】
本発明の第3実施形態について説明する。
センサ素子部4を機械的に反転させる場合、回転中に角速度の計測ができない。この問題を解消するため、第3実施形態では、2つのジャイロセンサ1の各センサ素子部4,4の回転動作を互いに半周期ずらし、各センサ素子部4,4の検出軸方向の反転の位相を互いに半周期ずらすように構成する。具体的には、各センサ素子部4,4を回転駆動する各ステッピングモータ7,7の回転動作を互いに同期させて半周期ずらすように制御すればよい。
【0029】
これにより、2つのセンサ素子部4,4から、図6に示すような極性が交互に反転した角速度信号ω1,ω2が、互いに半周期ずれた状態で発生する。このため、一方のセンサ素子部が回転している期間Δtの間では、他方のセンサ素子部は測定期間T1であり、角速度が計測できる。従って、それぞれのジャイロセンサの回転期間中の出力データを、回転していない他方のジャイロセンサ側の出力データで補間することで、角速度を実質的に連続計測できるようになる。
【0030】
ゴニオステージの回転軸と2個のジャイロセンサの検出軸を一致させ、最大±4度の傾斜を与えた。各センサは、角速度を半分の時間しか計測しないので、ゴニオステージの傾斜角の測定値は2つのジャイロセンサの角度を加算する。2つのジャイロセンサの計測角度を加算した結果、最大傾斜角が±4度となりゴニオステージに与えた傾斜角と一致した。これにより、2つのジャイロセンサを用いることで連続して角速度及び角度を計測できることがわかる。
【0031】
上記の実施形態は、本発明を振動型ジャイロセンサに適用した例を示したが、光ファイバジャイロセンサにも適用できる。光ファイバジャイロセンサに適用した場合は、光ファイバジャイロセンサが加速度に感度を持たないため、検出軸方向を回転させる際の回転の影響を受けないので、1つの光ファイバジャイロセンサを連続回転させることで、角速度の連続計測が可能である。
【0032】
上記実施形態では、積分後の出力値の差分を演算するようにしたが、積分する前のジャイロセンサの出力値を差分演算してもよい。ただし、積分後に差分演算する方が、システムノイズが平均化され、交流雑音の影響が抑制できる利点がある。
【0033】
また、本発明方法は、ジャイロセンサの以外にも加速センサや磁気センサにも適用することが可能である。
【図面の簡単な説明】
【0034】
【図1】本発明に係るドリフト抑制方法の第1実施形態を適用した角度検出回路の概略構成図
【図2】センサ素子部の反転動作の説明図
【図3】図1のジャイロセンサの出力状態を示すタイムチャート
【図4】差分処理によるドリフト低減の説明図
【図5】本発明に係るドリフト抑制方法の第2実施形態の出力極性を電気的に反転させる回路例を示す図
【図6】本発明に係るドリフト抑制方法の第3実施形態における2つのジャイロセンサの出力状態を示すタイムチャート
【符号の説明】
【0035】
1 ジャイロセンサ
2 積分処理回路
3 差分処理回路
4 センサ素子部
5 駆動電源
7 ステッピングモータ
8 回転軸
9 モータ制御回路
11 切換スイッチ
12 NOT回路
13 スイッチ制御回路
【特許請求の範囲】
【請求項1】
ジャイロセンサの出力に含まれるドリフト成分を低減するジャイロセンサのドリフト抑制方法であって、
前記ジャイロセンサの出力極性を周期的に反転させ、反転前と反転後の出力値の差分を演算することを特徴とするジャイロセンサのドリフト抑制方法。
【請求項2】
前記出力値を、ジャイロセンサの出力を積分処理した後の出力値とすることを特徴とする請求項1に記載のジャイロセンサのドリフト抑制方法。
【請求項3】
前記出力極性の反転は、ジャイロセンサの検出軸方向を機械的に反転させて行うことを特徴とする請求項1又は2に記載のジャイロセンサのドリフト抑制方法。
【請求項4】
前記ジャイロセンサがセンサ素子を励振させる振動型である場合、2つのジャイロセンサの前記検出軸方向の反転の位相を互いに半周期ずらし、それぞれのジャイロセンサの回転期間中の出力データを、回転していない他方のジャイロセンサ側の出力データで補間することを特徴とする請求項3に記載のジャイロセンサのドリフト抑制方法。
【請求項5】
前記ジャイロセンサがセンサ素子を励振させる振動型である場合、前記出力極性の反転は、前記センサ素子に印加する励振信号の極性を切替えて行うことを特徴とする請求項1又は2に記載のジャイロセンサのドリフト抑制方法。
【請求項6】
前記ジャイロセンサを、光ファイバジャイロセンサとすることを特徴とする請求項1〜3のいずれか1つに記載のジャイロセンサのドリフト抑制方法。
【請求項7】
加速度センサ又は磁気センサに適用することを特徴とする請求項1に記載のジャイロセンサのドリフト抑制方法。
【請求項1】
ジャイロセンサの出力に含まれるドリフト成分を低減するジャイロセンサのドリフト抑制方法であって、
前記ジャイロセンサの出力極性を周期的に反転させ、反転前と反転後の出力値の差分を演算することを特徴とするジャイロセンサのドリフト抑制方法。
【請求項2】
前記出力値を、ジャイロセンサの出力を積分処理した後の出力値とすることを特徴とする請求項1に記載のジャイロセンサのドリフト抑制方法。
【請求項3】
前記出力極性の反転は、ジャイロセンサの検出軸方向を機械的に反転させて行うことを特徴とする請求項1又は2に記載のジャイロセンサのドリフト抑制方法。
【請求項4】
前記ジャイロセンサがセンサ素子を励振させる振動型である場合、2つのジャイロセンサの前記検出軸方向の反転の位相を互いに半周期ずらし、それぞれのジャイロセンサの回転期間中の出力データを、回転していない他方のジャイロセンサ側の出力データで補間することを特徴とする請求項3に記載のジャイロセンサのドリフト抑制方法。
【請求項5】
前記ジャイロセンサがセンサ素子を励振させる振動型である場合、前記出力極性の反転は、前記センサ素子に印加する励振信号の極性を切替えて行うことを特徴とする請求項1又は2に記載のジャイロセンサのドリフト抑制方法。
【請求項6】
前記ジャイロセンサを、光ファイバジャイロセンサとすることを特徴とする請求項1〜3のいずれか1つに記載のジャイロセンサのドリフト抑制方法。
【請求項7】
加速度センサ又は磁気センサに適用することを特徴とする請求項1に記載のジャイロセンサのドリフト抑制方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2009−92583(P2009−92583A)
【公開日】平成21年4月30日(2009.4.30)
【国際特許分類】
【出願番号】特願2007−265293(P2007−265293)
【出願日】平成19年10月11日(2007.10.11)
【出願人】(000004651)日本信号株式会社 (720)
【出願人】(504190548)国立大学法人埼玉大学 (292)
【Fターム(参考)】
【公開日】平成21年4月30日(2009.4.30)
【国際特許分類】
【出願日】平成19年10月11日(2007.10.11)
【出願人】(000004651)日本信号株式会社 (720)
【出願人】(504190548)国立大学法人埼玉大学 (292)
【Fターム(参考)】
[ Back to top ]