
ジョーとガントリーとカウチの協調動作を利用した放射線療法の画像化及び送達
患者の治療区域に放射線療法治療計画を送達する方法。治療計画は、患者を支持するための可動式支持台と、支持台に対して動かすことができるガントリーとを含む放射線療法システムを使用して送達される。ガントリーは、放射線源と、或るジョー幅を有するジョーのセットと、治療計画の送達中に放射線を変調するためのマルチリーフコリメーターとを支持している。支持台は、治療区域への治療計画の送達中に動かされ、ジョーの幅は、治療区域への治療計画の送達中に動的に調節される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、放射線療法システムを使用して患者の治療区域に放射線療法治療計画を送達する方法に関する。
(関連出願)
本出願は、2005年7月23日に出願されている米国仮特許出願第60/701,585号「ガントリーとカウチとマルチリーフコリメーターの協調動作を利用した放射線療法の画像化及び送達」に対し優先権を主張している、2006年7月21日出願の米国特許出願第11/459,161号の一部継続出願であり、同出願に対する優先権を主張する。両出願の全内容を参考文献としてここに援用する。
【背景技術】
【0002】
従来の放射線療法では、患者は静止した治療カウチの上に寝かされ、静止した治療ガントリーによって治療される。多くの場合、放射線ビームを整形するのに、静止したブロックがビームの中へ挿入される。放射線療法が進歩するにつれ、治療の質を高め、治療をより効果的に送達しようとする動きが持ち込まれている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】米国仮特許出願第60/701,585号
【特許文献2】米国特許出願第11/459,161号
【発明の概要】
【0004】
放射線療法の分野の1つの方法には、患者カウチと放射線源を保持しているガントリーとを静止させたまま、同時にマルチリーフコリメーター(「MLC」)のリーフを動かすことが伴う。これは、動的MLC又はスライディングウインドウ技法と呼ばれ、一連の固定されたMLCパターンの送達効率を高めることができる。もう1つの方法は、MLC動作と並行して弧を描きながらガントリーを回転させるというものである。これは、強度変調振子療法(「IMAT」)と呼ばれている。軸方向放射線療法は、MLC動作を、ガントリー回転及び回転と回転の合間のカウチ移動と組み合わせている。更に進歩型のバージョンは、ヘリカル放射線療法として知られているもので、カウチをMLC動作及びガントリー回転と並行して同時に動かすことが伴う。ガントリー回転と患者の並進が組み合わされる結果、放射線源は、患者周りに螺旋状の軌跡をたどる。
【0005】
1つの実施形態では、本発明は、患者の画像化と放射線療法治療の両方を、放射線療法構成要素の新規で進歩した動作軌跡を通して行う諸方法を提供している。これらの方法は、同時に起こるカウチとMLC動作とガントリー回転を使用して治療を送達し且つ画像化をもたらす新規なやり方を含んでいる。
【0006】
本発明の1つの実施形態は、放射線療法システムを使用して、患者の治療区域に放射線療法治療計画を送達する或る方法を含んでいる。放射線療法システムは、患者を支持するための可動式支持台と、支持台に対して動かすことができるガントリーとを含み、ガントリーは、放射線源と、或るジョー幅を有するジョーのセットと、治療計画の送達中に放射線を変調するためのマルチリーフコリメーターとを支持している。本方法は、治療区域への治療計画の送達中、支持台を軸に沿って動かす段階と、治療区域への治療計画の送達中、ジョーの幅を動的に調節する段階を含んでいる。ジョーの幅の調節は、治療区域への治療計画の送達全体に沿って行うことができる。
【0007】
もう1つの実施形態では、本発明は、放射線療法システムを使用して、患者の治療区域に放射線療法治療計画を送達する或る方法を提供している。放射線療法システムは、患者を支持するための可動式支持台と、支持台に対して動かすことができるガントリーとを含み、ガントリーは、放射線源と、或るジョー幅を有するジョーのセットと、治療計画の送達中に放射線を変調するためのマルチリーフコリメーターとを支持している。本方法は、治療区域への治療計画の送達中に支持台を或る軸に沿って変化する速度で動かす段階と、治療計画の送達中にガントリーを支持台に対して変化する速度で動かす段階を含んでいる。
【0008】
本発明の他の態様は、詳細な説明及び添付図面を考察することにより明らかになるであろう。
【図面の簡単な説明】
【0009】
【図1】放射線療法治療システムの斜視図である。
【図2】図1に示されている放射線療法治療システムで使用することができるマルチリーフコリメーターの斜視図である。
【図3】図1の放射線療法治療システムの概念図である。
【図4】放射線療法治療システムで使用されるソフトウェアプログラムの概略線図である。
【図5】本発明の1つの実施形態による、患者に放射線療法治療を送達する方法の流れ図である。
【図6】本発明の1つの実施形態による、患者に放射線療法治療を送達する方法の流れ図である。
【図7】本発明の1つの実施形態による、患者に放射線療法治療を送達する方法の流れ図である。
【図8】本発明の1つの実施形態による、患者に放射線療法治療を送達する方法の流れ図である。
【図9】本発明の1つの実施形態による、患者に放射線療法治療を送達する方法の流れ図である。
【図10】本発明の1つの実施形態による、患者に放射線療法治療を送達する方法の流れ図である。
【図11】本発明の1つの実施形態による、患者に放射線療法治療を送達する方法の流れ図である。
【図12】本発明の1つの実施形態による、患者に放射線療法治療を送達する方法の流れ図である。
【図13】固定ジョー療法で異なるジョー幅を使用した場合の目標放射線フルエンス分布対送達放射線フルエンス分布の比較のグラフ表示である。
【図14】ランニングスタート・アンド・ストップ療法で異なるジョー幅を使用した場合の目標放射線フルエンス分布対送達放射線フルエンス分布のグラフ表示である。
【図15】動的ジョー療法で任意のジョー幅を使用した場合の目標放射線フルエンス分布対送達放射線フルエンス分布のグラフ表示である。
【図16】動的カウチ治療送達対定速カウチ治療送達の放射線源及びジョー軌跡の比較のグラフ図解である。
【図17】動的ジョー動的カウチ療法送達の或る特定のパラメータを計算する場合の作業の流れの描写である。
【発明を実施するための形態】
【0010】
本発明の実施形態について詳細に説明する前に、本発明は、その適用においては、以下の記述に述べられ又は以下の図面に示されている構造の詳細事項及び構成要素の配列に限定されないものと理解されたい。本発明は、他の実施形態でも実現可能であり、様々なやり方で実践又は実施することができる。更に、ここに使用されている語句及び用語の言い回しは、説明を目的としたものであり、限定を課すものと見なされるべきではないと理解されたい。「含んでいる」、「備えている」、又は「有する」、及びそれらの変形がここで使用されている場合、それらは、その後に掲げられている項目及びそれらの等価物並びに追加の項目を網羅するものとする。別途指定又は限定のない限り、「取り付けられている」、「接続されている」、「支持されている」、及び「連結されている」という用語並びにそれらの変形は、広義に使用されており、直接的と間接的の両方の取り付け、接続、支持、及び連結を網羅する。更に、「接続されている」、及び「連結されている」は、物理的又は機械的な接続又は連結に限定されない。
【0011】
ここでは図面を記述する際に、上、下、下方、上方、後方、底部、前部、後部などの様な方向に関する言及がなされているが、これらの言及は、便宜上、(垂直に見た)図面に対してなされている。これらの方向は、文字通りに解釈されることも、本発明を何らかの形態に限定することも、意図していない。更に、ここでは説明を目的として「第1」、「第2」、及び「第3」の様な用語が使用されているが、これらには相対的な重要性又は有意性を暗示又は示唆する意図はない。
【0012】
更に、本発明の実施形態は、ハードウェアとソフトウェアの両方、及び電子構成要素又はモジュールを含んでおり、それらは、考察を目的として、構成要素の大多数があたかも単独でハードウェアに実装されているかの様に示されたり説明されたりすることもあるものと理解されたい。しかしながら、当業者においては、この詳細な説明から読み取られた事柄に基づき、少なくとも1つの実施形態では、本発明の電子ベースの態様をソフトウェアで実装してもよいことが認識されるであろう。よって、本発明を実装するのに、複数のハードウェア及びソフトウェアベースの装置、並びに複数の異なる構造の構成要素が利用されてもよいことに留意されたい。更に、後段に記述している様に、図面に示されている特定の機械的構成は、本発明の実施形態を例示することを意図したものであり、他の代わりの機械的構成も実施可能である。
【0013】
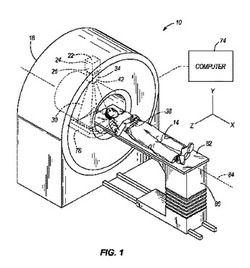
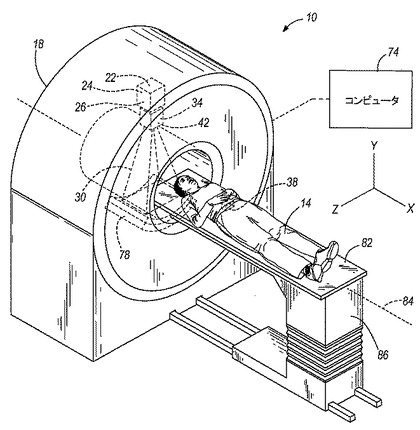
図1は、患者14に放射線療法を提供することができる放射線療法治療システム10を示している。放射線療法治療は、光子ベースの放射線療法、近接照射療法、電子ビーム療法、光子線又は中性子線又は粒子線療法、又は他の型式の治療方法を含むことができる。放射線療法治療システム10は、ガントリー18を含んでいる。ガントリー18は、放射線モジュール22を支持することができ、同モジュールは、放射線源24と、放射線のビーム30を生成する働きをする線形加速器26を含むことができる。図面に示されているガントリー18は、リングガントリー、即ち全360°の円弧に亘って広がって完全なリング又は円を作り出しているものであるが、他の型式の取り付け配置構造を採用することもできる。例えば、C字型、部分リングガントリー、又はロボットアームの様な、非リング形状のガントリーを使用することもできるであろう。放射線モジュール22を、患者14に対して様々な回転方向及び軸方向位置に位置決めすることのできる何か他の骨組みを採用してもよい。更に、放射線源24は、ガントリー18の形状に沿わない経路を進んでもよい。例えば、図示のガントリー18が概ね円形の形状であっても、放射線源24には非円形経路を進ませることができる。
【0014】
放射線モジュール22は、更に、放射線ビーム30を修正又は変調する働きをする変調装置34を含むことができる。変調装置34は、放射線ビーム30の変調を提供し、放射線ビーム30を患者14に向けて方向決めする。具体的には、放射線ビーム30は、患者の一部分に向けて方向決めされる。広義に言うと、当該部分には全身を含めてもよいが、全身よりも小さい場合が一般的であり、二次元的な面積及び/又は三次元的な体積によって定義することができる。放射線を受けさせたい部分、これを標的38又は標的領域と呼んでもよく、関心領域の一例である。もう1つの種類の関心領域に要注意領域がある。或る部分に要注意領域が含まれている場合は、放射線ビームは当該要注意領域から逸らされるのが望ましい。患者14は、放射線療法を受ける必要がある標的領域を2つ以上有していることもある。その様な変調は、時に、強度変調放射線療法(「IMRT」)と呼ばれることもある。
【0015】
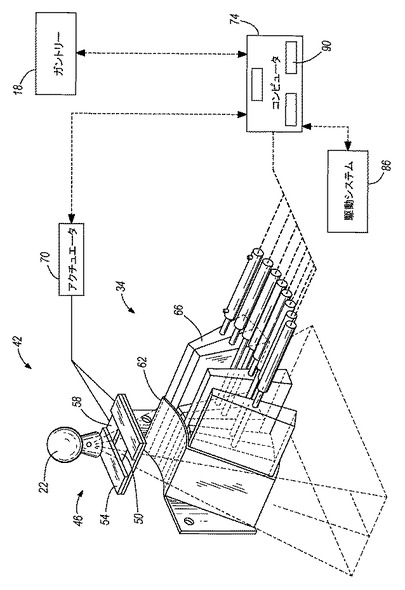
変調装置34は、図2に示されている照準装置42を含むことができる。照準装置42は、放射線ビーム30を通過させる開口50の寸法を画定及び調節するジョー46のセットを含んでいる。ジョー46は、上ジョー54と下ジョー58を含んでいる。上ジョー54と下ジョー58は、開口50の寸法を調節するために可動になっている。
【0016】
図2に示されている1つの実施形態では、変調装置34は、強度変調を提供するため、次々に位置を移動する働きをする複数のインターレース型リーフ66を含んでいるマルチリーフコリメーター62を備えることができる。更に、リーフ66は、最小開位置と最大開位置の間の何処の位置へも動かせることに留意されたい。複数のインターレース型リーフ66は、放射線ビーム30が患者14の標的38に到達する前に、放射線ビーム30の強さ、寸法、及び形状を変調する。リーフ66のそれぞれは、リーフ66が素早く開閉して放射線の通過を許可又は阻止できるように、モーター又は空気弁の様なアクチュエータ70により独立的に制御されている。アクチュエータ70は、コンピュータ74及び/又は制御装置によって制御することができる。
【0017】
放射線療法治療システム10は、更に、放射線ビーム30を受ける働きをする検出器78、例えばキロ電圧又はメガ電圧検出器、を含むことができる。線形加速器26と検出器78は、患者14のCT画像を生成するコンピュータ断層撮影(CT)システムとして作動することもできる。線形加速器26は、放射線ビーム30を、患者14の標的38に向けて放射する。標的38は、放射線の幾らかを吸収する。検出器78は、標的38によって吸収された放射線の量を検出又は測定する。検出器78は、線形加速器26が患者14の周りを回転して放射線を患者14に向けて放射する際の異なる角度からの吸収データを収集する。収集された吸収データは、吸収データを処理して患者の体組織と臓器の画像を生成するコンピュータ74に送信される。画像は、骨、軟組織、及び血管も示すことができる。
【0018】
CT画像は、扇状幾何学形状、多薄片幾何学形状、又は円錐ビーム幾何学形状を有する放射線ビーム30を用いて取得することができる。また、CT画像は、メガボルト級のエネルギー又はキロボルト級のエネルギーを送達する線形加速器26を用いて取得することもできる。更に、取得されたCT画像は、以前に取得された(放射線療法治療システム10、又は他のCTスキャナ、MRIシステム、及びPETシステムの様な他の画像取得装置からの)CT画像と位置合わせすることもできることに留意されたい。例えば、患者14の以前に取得されたCT画像が、輪郭付けプロセスを経て同定され得た標的を含んでいることもある。患者14の新たに取得されたCT画像を以前に取得されたCT画像と位置合わせすれば、新たなCT画像中に標的38を同定するのに助けとなる。位置合わせプロセスは、堅い又は変形可能な位置合わせツールを使用することができる。
【0019】
幾つかの実施形態では、放射線療法治療システム10は、X線源とCT画像検出器を含むことができる。X線源とCT画像検出器は、画像データを取得するのに上述の線形加速器26及び検出器78と同様の方式で作動する。画像データはコンピュータ74に送信され、そこで処理されて、患者の体組織及び臓器の画像が生成される。
【0020】
放射線療法治療システム10は、更に、患者14を支持するカウチ82(図1に図示)の様な患者支持台を含むことができる。カウチ82は、x、y、又はz方向の少なくとも1つの軸84に沿って動く。本発明の他の実施形態では、患者支持台は、患者の身体の何れかの部分を支持するように適合されている装置であってもよい。患者支持台は、患者の全身を支持しなくてはならないと限定されているわけではない。システム10は、更に、カウチ82の位置を操縦する働きをする駆動システム86を含むことができる。駆動システム86は、コンピュータ74によって制御することができる。
【0021】
図2と図3に示されているコンピュータ74は、様々なソフトウェアプログラム及び/又は通信アプリケーションを実行するためのオペレーテイングシステムを含んでいる。具体的には、コンピュータ74は、放射線療法治療システム10と通信する働きをする(単数又は複数の)ソフトウェアプログラム90を含むことができる。コンピュータ74は、医療従事者がアクセスできるように適合されている何らかの適した入力/出力装置を含むことができる。コンピュータ74は、プロセッサ、I/Oインターフェース、及び記憶装置、又はメモリの様な、典型的なハードウェアを含むことができる。コンピュータ74は、キーボードやマウスの様な入力装置を含むこともできる。コンピュータ74は、更に、モニターの様な標準的出力装置を含むことができる。加えて、コンピュータ74は、プリンタやスキャナの様な周辺機器を含むことができる。
【0022】
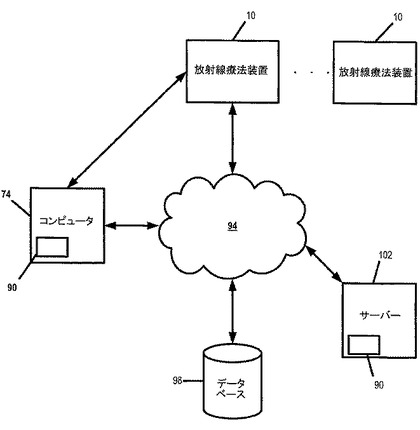
コンピュータ74は、他のコンピュータ74及び他の放射線療法治療システム10とネットワーク化させることができる。他のコンピュータ74は、追加の及び/又は異なるコンピュータプログラム及びソフトウェアを含んでいてもよく、ここに記載されているコンピュータ74と同じである必要はない。コンピュータ74と放射線療法治療システム10は、ネットワーク94と通信することができる。コンピュータ74と放射線療法治療システム10は、更に(単数又は複数の)データベース98及び(単数又は複数の)サーバー102と通信することができる。(単数又は複数の)ソフトウェアプログラム90は(単数又は複数の)サーバー102上に常駐させることもできることに留意されたい。
【0023】
ネットワーク94は、如何なるネットーク化技術又はトポロジー、又は技術とトポロジーの組合せに従って構築することもでき、複数のサブネットワークを含むことができる。図3に示されているコンピュータとシステムの間の接続は、ローカルエリアネットワーク(「LAN」)、ワイドエリアネットワーク(「WAN」)、公衆交換電話網(「PSTN」)、無線ネットワーク、イントラネット、インターネット、又はあらゆる他の適したネットワークを通して行うことができる。病院又は保険医療施設では、図3に示されているコンピュータとシステムの間の通信は、ヘルス・レベル・セブン(Health Level Seven)(「HL7」)プロトコル、又は任意のバージョン及び/又は他の必要なプロトコルを備えた他のプロトコル類を通じて行うことができる。HL7は、保険医療環境で電子データを交換する場合の、異なる製造供給元による2つのコンピュータアプリケーション(送信側と受信側)の間のインターフェースの実装を定める標準的なプロトコルである。HL7は、保健医療機関が、異なるアプリケーションシステムからのデータのキーセットを交換できるようにしている。具体的には、HL7は、交換されるべきデータ、やり取りのタイミング、及びアプリケーションへのエラーの連絡を定義することができる。フォーマットは、一般的に汎用性があり、関連のアプリケーションの必要を満たすように構成することができる。
【0024】
図3に示されているコンピュータとシステムの間の通信は、任意のバージョン及び/又は他の必要なプロトコルを備えたDigital Imaging and Communications in Medicine(DICOM)プロトコルを通じて行うこともできる。DICOMは、NEMAによって開発された国際通信標準であり、異なる医療機器間で医用画像関連データを伝送するのに使用されるフォーマットを定義している。DICOM RTは、放射線療法データに特化された標準を指す。
【0025】
図3の二方向矢印は、図3に示されているネットワーク94とコンピュータ74の何れか及びシステム10の何れかとの間の二方向通信及び情報伝送を概略的に表現している。しかしながら、一部の医用コンピュータ機器では、一方向の通信及び情報伝送しか必要でないかもしれない。
【0026】
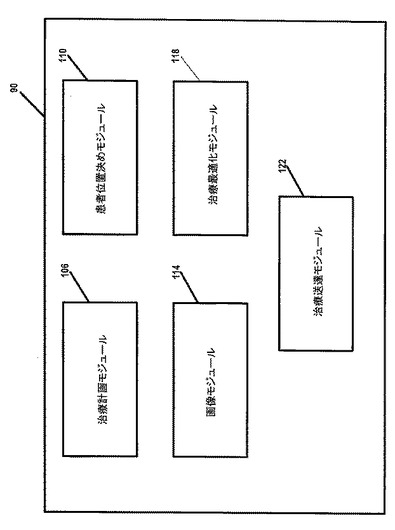
図4は、ソフトウェアプログラム90の概略図である。ソフトウェアプログラム90は、放射線療法治療プロセスの機能を果たすべく互いに交信し合う複数のモジュールを含んでいる。様々なモジュールは、放射線療法を患者14に送達するのに互いに通信し合うように適合されている。
【0027】
ソフトウェアプログラム90は、医療従事者によるシステム10へのデータ入力に基づいて患者14の治療計画を生成する働きをする治療計画モジュール106を含んでいる。データは、患者14の少なくとも一部分の1つ又はそれ以上の画像(例えば、計画画像及び/又は治療前画像)を含んでいる。治療計画モジュール106は、医療従事者による処方入力に基づき、治療を複数のフラクションに分け、それぞれのフラクション又は治療用の放射線線量を確定する。治療計画モジュール106は、また、標的38の周りに描かれた様々な輪郭に基づいて標的38用の放射線線量も確定する。複数の標的38が存在していることもあるし、それらが同じ治療計画に含まれていることもある。
【0028】
ソフトウェアプログラム90は、更に、患者14を、ガントリー18の等角点に対して、又は特定の治療フラクション用の他の基準に対して、位置決め及び整列させる働きをする患者位置決めモジュール110を含んでいる。患者14がカウチ82に載せられている間に、患者位置決めモジュール110は、患者14の画像を取得し、患者14の現在位置を計画画像又は以前に取得された画像内の患者の位置と比較する。患者の位置を調節する必要があれば、患者位置決めモジュール110が駆動システム86に命令を与えてカウチ82を動かすこともできるし、手動で患者14を新しい位置へ動かすこともできる。
【0029】
1つの態様では、患者位置決めモジュール110は、ガントリー18の等角点又は他の基準に対する患者の位置データを提供するように治療室に配置されているレーザーから、データを受信することができる。レーザーからのデータに基づき、患者位置決めモジュール110は駆動システム86に命令を与え、駆動システム86はカウチ82を動かして、患者14のガントリー18又は他の基準に対する正しい整列を実現する。整列プロセスを支援するのに、レーザー以外の装置及びシステムを使用して患者位置決めモジュール110にデータを提供することもできることに留意されたい。
【0030】
ソフトウェアプログラム90は、更に、患者14の少なくとも一部分の画像を取得する働きをする画像モジュール114を含んでいる。画像モジュール114は、CT画像化装置の様なオンボード画像装置に命令して、所望のプロトコルに従い、治療開始前、治療中、及び治療後の患者14の画像を取得させることができる。1つの態様では、画像モジュール114は、患者14が実質的に治療位置に在る間に患者14の画像を取得する。患者14の治療前画像を取得するのに、他の画像化装置、例えば非定量的なCT、MRI、PET、SPECT、超音波、透過画像化、蛍光透視法、RFベースの局所化など、を使用してもよい。取得された画像は、患者14の位置合わせのために使用することができる。
【0031】
ソフトウェアプログラム90は、治療計画モジュール106により生成された治療計画を最適化する働きをする治療最適化モジュール118を含むことができる。具体的には、最適化モジュール118は、放射線療法治療システム100が治療計画を最適に送達するのに必要なコマンド又は命令を生成する。最適化モジュール118は、患者14が受けようとしている治療の型式及び/又は放射線療法治療システム10の作動モードに基づき、放射線療法治療システム10の作動の様々なパラメータを確定及び選択する働きをする。パラメータの幾つかには、限定するわけではないが、リーフ66の位置、ガントリー角度と角速度、駆動システム86の速度、カウチ82の動作型式、ジョー開口50の寸法、カウチ動作範囲、及び放射線ビーム強度が含まれる。
【0032】
最適化モジュール118は、技術者又は保健医療専門家が、放射線療法治療システム10及び放射線療法を支援する関連装置の作動モードを選択できるようにしている。作動モードは、手動モード、半自動モード、自動モード、又はこれらのモードの組合せを含むことができる。代わりに、ソフトウェアプログラム90及び/又は最適化モジュール118は、放射線治療の特定の段階に関係する放射線療法治療システム10のパラメータを、選択的に調節する働きをするサブモジュールを含むことができる。
【0033】
最適化モジュール118は、治療計画モジュール106と通信して、治療計画に記されている送達されるべき治療の型式に基づき、放射線療法治療システム10用の設定を確定する。治療計画送達の1つの型式では、放射線療法治療システム10は、カウチ82に載せられた患者14を位置決めし、ガントリー18が設定された位置又は角度に維持されている間に、少なくとも1回、カウチ82を少なくとも部分的にガントリー開口部を通して動かすことによって患者14に放射線を送達するように、構成することができる。これは、時に、トポセラピーと呼ばれることもある。患者14の全長がガントリー開口部を通過しなくてはならないわけではなく、むしろ患者の何れかの部分がガントリー開口部を通過するか又は開口部内に横たわっていればよいことに留意されたい。カウチ82は、段階的に、一定の直線動作で、及び/又は両動作型式を組み合わせて、動かすことができることに留意されたい。この態様では、患者14の1回又はそれ以上の少なくとも部分的なガントリー開口部通過について、所望の(単数又は複数の)ガントリー角度を選択することができる。保健医療専門家は、放射線療法治療システム10の他のパラメータを指定することもできる。幾つかの態様では、最適化モジュール118は、患者14のガントリー開口部通過毎に、放射線治療療法システム10のパラメータを自動的に設定することができる。最適化モジュール118によって自動的に設定されるパラメータは、限定するわけではないが、患者14のガントリー18開口部通過回数、(単数又は複数の)ガントリー角度、駆動システムの速度、カウチの動作範囲、ジョー開口45の寸法、及び放射線ビーム強度を含むことができる。
【0034】
最適化モジュール118は、更に、画像モジュール114に命令を与えて、放射線療法治療システム10を使用して患者14のトポグラフィー及び/又は断層撮影画像化を行わせることもできる。最適化モジュール118は、患者14がガントリー開口部を通って進む通過回数、ガントリー角度、駆動システム86の速度、カウチ動作範囲、ジョー開口50の寸法、及び放射線ビーム強度を含め、トポグラフィー及び/又は断層撮影画像化のための各種設定を選択することができる。
【0035】
最適化モジュール118は、走査計画治療モードを含むことができる。走査計画治療モードは、放射線療法治療システム10を使用して中断なしに1回のセッションで、患者14を走査し、治療計画を生成し、患者14を治療する一連の段階を含んでいる。放射線療法治療システム10は、患者14の位置決めと治療計画立案と計画の送達を単一のシステムに統合している。放射線療法のために患者14を医療施設の中の多数の部署に搬送する必要はより少なくなる。システムの統合及び一部の状況では輪郭を同定するのに幾何学的形状が使用されることの成果として、患者14には大凡20分又はそれより短い時間で治療を施すことができる。例えば、カウチ82に載せられた患者14を位置決めするのに約2分、CT画像を取得するのに約3分から約6分、輪郭を同定するのに約3分、治療計画を生成するのに約2分、そして計画を送達するのに約3分かかるはずである。
【0036】
幾つかの態様では、最適化モジュール118は、1回又はそれ以上のトポグラフィー法での通過のための最適化方法を提供する。これらは、ユーザーが手動で実施することもできるし、システム10が自動的に実施することもできる。これらの方法は、好適なガントリー角度、ピッチ、ガントリー速度、ジョー開口、カウチ速度、及び/又はカウチ動作範囲を同定する段階及び/又は最適化する段階を含んでいる。
【0037】
発明のもう1つの実施形態は、標的38を、より広い面積を含むように引き伸ばす段階を含んでいる。このプロセスは、時に、リーフフラッシングと呼ばれることもあり、治療中の患者14の動作に応えて放射線ビーム30の面積を広げることが伴う。例えば、患者14の一部の臓器は、患者14が放射線療法治療を受けている際、拡張したり収縮したりする。リーフフラッシングプロセスは、治療前及び/又は治療中の画像を利用して、治療を必要とする可能性がある標的38周囲の追加の(単数又は複数の)マージンを判定する。例えば、患者14の胸部区域に在る事前に判定されている標的38を、リーフフラッシング手法で治療することができる。胸部区域は、患者14が呼吸すると収縮したり拡張したりする。リーフフラッシング手法は、保健医療専門家が、胸部区域の変化を画像の形態で観察して、放射線療法を、治療全体のうちの少なくとも1フラクション中に標的38の(単数又は複数の)マージンを網羅するよう調節できるようにする。代わりに、最適化モジュール118は、放射線療法治療システム10に、画像を取得し、患者14の解剖学的構造の画像及び予想される変化に基づいて治療を調節することにより、リーフフラッシング手法を自動的に行わせるための命令を含むことができる。最適化モジュール118を実行しているコンピュータ74はまた、トポセラピー治療及び断層撮影画像化を、自動的に、又は資格のある使用者の監督の下に、行ってもよい。
【0038】
治療計画送達のもう1つの型式では、放射線療法治療システム10は、カウチ82に載せられた患者14を位置決めし、ガントリー18が画定されている経路に沿って回転させられている間に、少なくとも1回、カウチ82を少なくとも部分的にガントリー開口部を通して動かすことによって患者14に放射線を送達するように、構成することができる。ガントリー回転の画定されている経路は、短い円弧又は第1位置と第2位置の間であり、第2位置は第1位置と異なっている。画定されている経路は、完全な円に満たない。カウチ82の動きと組み合わされたこの型式のガントリーの動きは、時に、動的正接と呼ばれることもある。
【0039】
患者14は(単数又は複数の)標的38を同定するのを支援する画像を取得するための画像化手法を受ける。(単数又は複数の)画像及び/又は治療計画に基づき、最適化モジュール118は、ガントリー18を走行させる画定された経路の開始角度と終了角度を同定することができる。最適化モジュール118は、カウチ82の動作範囲、螺旋のスペーシング、ジョー開口50の寸法、及び駆動システム86の速度の様な、放射線療法治療システム10の他のパラメータを確定することができる。最適化モジュール118は、放射線療法治療システム10に命令を与え、カウチ82が患者14をガントリー開口部に進入させ通過させてゆく間に、ガントリー18を第1位置又は開始位置から第2位置又は終了位置まで回転させ、放射線ビーム30を標的38に向けて投射させる。
【0040】
動的正接手法は、患者14をガントリー開口部から搬出しながら行うこともできる。例えば、患者14がガントリー開口部を通過して出てゆく際に、ガントリー18を第2位置又は終了位置から第1位置又は開始位置へ回転させることができる。保健医療専門家は、ガントリー開口部を通過させる都度、開始位置、終了位置、駆動システム86の速度、及びカウチ動作範囲の様な作動パラメータを視察し、調節することができる。
【0041】
放射線療法治療システム10は、キラリティー(即ち、螺旋の自軸に対する回転の方向)が共通か逆の何れかの螺旋又は両者の複合の螺旋を使用して、治療計画を送達することができる。逆のキラリティーは、前回の送達通過後の送達通過について、カウチの移動の方向又はガントリー回転の方向の何れかを逆転させることによって実現される。
【0042】
本発明の様々な態様では、治療選択肢として、画像化又は治療中のガントリー速度及び/又は方向を変えること、治療中のカウチ速度及び/又は方向を変えること、ガントリーの方向を切り替える前に治療通過全部を完了すること、患者へより高い又はより低い線量の放射線を送達するためにガントリーの方向を変えること、誤差又は患者動作を補正するためにガントリーの方向を変えること、及び/又は誤差又は患者動作を予想し検出/補正プロセスに遅滞があればそれらを補償するために予測ゲーティングを使用すること、を含むことができる。追加的に、前述の動的正接技法の実施形態は何れも、外部装置を使用して、カウチ82又は患者の同時に起こる離散動作又は連続動作と組み合わせることができる。その様な動作は、離散又は連続の何れでもよく、並進又は移動量を備えている回転の何らかの組合せを用いて、一定又は可変の速度で行うことができる。
【0043】
更なる実施形態は、患者の呼吸パターンの自動検出及び/又は臨床観察を通しての送達の最適化を含んでいる。これは、呼吸の一時停止を手動で設定する段階、又は患者移動装置に基づいて線形加速器又はMLCを自動的にゲーティングする段階を含むことができる。患者の呼吸が治療計画の送達を妨げる場合、例えば患者の呼吸が不安定になった場合には、当該手法は、患者の呼吸が安定するまで放射なしに(ビームをオフにするか又はリーフを閉じて)継続することができる。この場合、システム10は、抜かされた治療領域を記録することができる。抜かされた領域は、やり直し手続きへ積み増され、抜かされた放射線の量及び臨床的必要に応じて適宜(日毎、週毎、月毎など)に実行される。
【0044】
動的正接治療も、断層撮影及び/又はトポグラフィー画像化と組み合わせることができ、その場合、患者14に放射線療法治療を受けさせながら、(単数又は複数の)画像を採取する。画像は、動的正接手法を停止させるか又は減速させ、放射線源24を用いて一画像又は複数画像を取得することにより、取得することができる。一旦、画像が取得されたら、動的正接手法は再開される。幾つかの代替法は、ガントリー18が第1位置に在るときに画像を取得する段階を含んでいる。他の代替法は、ガントリー18の第1位置又は開始位置と第2位置又は終了位置の間の或る角度で画像を取得するものである。治療中に採取された画像に基づき、保健医療専門家は、患者14の次回通過用に放射線療法治療システム10のパラメータを選択的に調節してもよいし、又はこれらのパラメータは自動的に調節されてもよい。代わりに、最適化モジュール118は、第1位置又は開始位置、第2位置又は終了位置、ガントリー速度、カウチ動作範囲、駆動システム86の速度、ジョー開口50の寸法、リーフ66の位置、の様な動的正接パラメータを自動的に設定するための命令を含むことができる。
【0045】
治療計画送達のもう1つの型式では、ガントリー往復動作がカウチ82の動きと組み合わされている。治療計画送達のこの型式では、放射線療法治療システム10は、カウチ82に載せられた患者14を位置決めし、ガントリー18が画定されている経路に沿って往復動作しながら回転している間に、少なくとも1回、カウチ82を少なくとも部分的にガントリー開口部を通して動かすことによって患者14に放射線を送達するように、構成することができる。ガントリー回転の画定されている経路は、短い円弧又は第1位置と第2位置の間であり、第2位置は第1位置と異なっている。画定されている経路は、完全な円に満たない。これは、時に、揺動ガントリーと呼ばれることもある。
【0046】
患者14は(単数又は複数の)標的38を同定するのを支援する画像を取得するための画像化手法を受ける。(単数又は複数の)画像及び/又は治療計画に基づき、最適化モジュール118は、ガントリー18を走行させる画定された経路の開始角度と終了角度を同定することができる。最適化モジュール118は、カウチ82の動作範囲、螺旋スペーシング、ジョー開口50の寸法、及び駆動システム86の速度の様な、放射線療法治療システム10の他のパラメータを確定することができる。最適化モジュール118は、放射線療法治療システム10に命令を与え、カウチ82が患者14をガントリー開口部に進入させ通過させてゆく間に、ガントリー18を第1位置又は開始位置と第2位置又は終了位置の間で経路に沿って往復式に回転させ、放射線ビーム30を標的38に向けて投射させる。
【0047】
治療の揺動ガントリー法も、患者14に放射線治療を受けさせながら、(単数又は複数の)画像を採取する、患者の断層撮影又はトポグラフィー画像化を含むことができる。画像は、ガントリー18を開始位置と終了位置の間の或る角度で選択的に停止させ、一画像又は複数画像を取得し、そして治療を再開することによって、取得することができる。治療中に採取された画像に基づき、保健医療専門家は、患者14の次回通過用に放射線療法治療システム10のパラメータを調節することができる。
【0048】
揺動ガントリー手法は、患者14をガントリー開口部から搬出しながら行うこともできる。例えば、患者14がガントリー開口部を通され出てゆく際に、ガントリー18を往復式に第2位置又は終了位置から第1位置又は開始位置へ回転させることができる。保健医療専門家は、ガントリー開口部を通過させる都度、開始位置、終了位置、駆動システム86の速度、及びカウチ動作範囲の様な作動パラメータを視察し、調節することができる。
【0049】
本発明のもう1つの態様は、複数の同定された標的38を抱える患者14に療法を提供するため、放射線療法治療システムのパラメータを調節することを含んでいる。これは、多領域治療と呼ばれ、放射線治療を第1の標的38に提供したら、次の標的38に治療を提供することへ自動的に進むことが伴う。これは、離散する標的38への効率的且つ自動的な治療を提供することができる。標的38は、揺動ガントリー又は動的正接の様な異なる型式の治療を必要としているかもしれない。多領域治療手法は、治療されるべきそれぞれの標的38について、ジョー開口50の寸法、リーフ66の位置、駆動システム86の速度、及びカウチ動作範囲の様なパラメータを自動的に調節することにより、様々な治療型式を組み込むことができる。患者14がガントリー開口部14を1回通過する際、多領域治療手法は、治療順序の合間に患者14の位置を自動的に調節することができる。
【0050】
トポグラフィー画像化を多領域治療手法と併合することもできる。他の治療手法と同様に、放射線療法治療システム10を所望の場所で停止させるか又は減速させて1つ又はそれ以上のCT画像を取得し、その後治療を継続する、というようにしてCT画像を選択的に取得することができる。治療中に採取されたCT画像に基づき、保健医療専門家は、治療されるそれぞれの標的38について治療を選択的に調節することができる。代わりに、最適化モジュール118は、治療されるべき標的38の数を自動的に判定し、それらの標的38の特徴に従ってそれぞれの治療用の放射線療法治療システムのパラメータを調節し、治療と治療の合間に患者14の位置を変える、ための命令を含むことができる。
【0051】
本発明のもう1つの態様は、放射線治療におけるカウチ動作との同時発生円錐ビームCT(「CBCT」)画像化を含んでいる。このプロセスは、ガントリー18の動きと組み合わせることができる。この組合せは、患者14が定速でガントリーへ進入されてゆく際、放射線源24が患者14周りの螺旋状の経路をたどることから、ヘリカル軌跡CBCTと呼ばれる。もう1つの態様は、静止したガントリー18との同時発生カウチ動作である。CBCT画像化の放射線源24は、患者14がカウチ82によって駆動システム86の作用下に定速で動かされている際、定位置を維持する。もう1つの態様は、CBCT画像化の開始角度と終了角度の間のガントリー回転との同時発生カウチ動作である。ガントリー18が開始角度から終了角度へ回転し、患者14がカウチ82によってガントリー開口部を通過させられている間に、CBCT画像を採取することができる。ガントリー18はまた、患者14がカウチ82によって動かされてゆく際、開始角度と終了角度の間を往復動作で回転することができる。
【0052】
本発明のもう1つの態様は、限定するわけではないが、PET、SPECT、又はMRIの様な他の画像化システムとカウチ82の同時発生動作である。代わりに、最適化モジュール118は、同時発生CBCT画像化又は他の画像手法用に放射線療法治療システム10の作動パラメータを自動的に選択することができ、すると所定の条件下でのカウチ82動作が保健医療専門家によって選択されることになる。
【0053】
本発明のもう1つの態様は、放射線療法治療システム10のパラメータを調節して、複数の標的38のCT画像を生成することを含んでいる。具体的には、保健医療専門家は、放射線療法治療のパラメータを調節して、患者14がガントリー開口部を1回通過する間に、標的38のCT画像を取得し、そして次の標的38に進む。CT画像を取得するのに、患者14を1つの領域から次の領域へ搬送することには、駆動システム86の速度、カウチ82の動作範囲、及びガントリー角度の様な、放射線療法治療システムのパラメータを調節することが必要になるかもしれない。代わりに、最適化モジュール118は、自動的に、関心領域のCT画像を取得するための適切なパラメータを設定し、患者14の位置を変え、次の領域又は以降の領域でのCT画像化について適切なパラメータを設定することができる。
【0054】
本発明のもう1つの態様は、治療計画に従った患者14への治療の送達中に、放射線療法治療システム10のパラメータを動的に調節することを含んでいる。治療システム10の或る特定のパラメータ又は構成要素の動的な調節は、マルチリーフコリメーター62のリーフ66の調節と同様のやり方で、患者14(又は、より具体的には標的38)が受ける放射線の量を変調する機能を果たす。
【0055】
1つの実施形態では、治療計画は、治療計画の送達中のカウチ82及び/又はガントリー18の速度の変調を通せば、マルチリーフコリメーター62単独の変調を用いて実現でき得るより一層効率良く送達させることができる。一定のカウチ速度を使用した治療送達では、カウチ62の速度は、治療区域又は標的38内の(当該区域の放射線減衰が高いせいで)最長の照射時間を要する治療部分によって決まる。
【0056】
【数1】

【0057】
ガントリー18の速度は、一定のスレッドピッチが維持されるように、計画されたピッチに従ってカウチ82と同期するように調節することができる。この送達モードでは、送達線量は、計画された線量と実質的に同じになるはずであるが、
【0058】
【数2】
【0059】
に縮まる(例えば、20cm半径の患者身体で、PTVが長さ10cm、広域変調因数
=3の場合)。2.5cmのジョー幅では、通常の送達時間は3x3分=9分間である。
【0060】
【数3】
【0061】
ば、総送達時間は(3×0.1+0.9)×3分=3.6分間に縮まり、即ち、非変調送達(3分)とほぼ同じである。ガントリー18の速度の動的調節は、或る特定の角度で変化のあるフルエンス強度を実現するのにも使用することができる。
【0062】
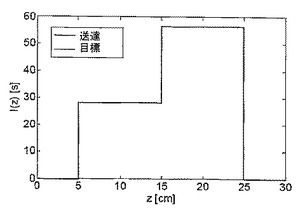
図13を例として用いると、要求フルエンスレベル又は照射時間は、5cmから15cmの領域では、15cmから25cmの領域より低い。従って、図16にグラフで示されている様に、カウチ82は、この領域ではより速く動くことができる。図16の左の線の組は動的カウチ治療送達を表現しており、右の線の組は、定カウチ速度治療送達を表している。当該領域でのカウチ82の速度を上げると、ジョー54、58の軌道を表している線はより急勾配となり、図16に示されている様に、カウチ82の速度が5cmから15cmの間で上がったとき、全治療時間は短縮する。要求フルエンスレベル/照射時間のその様な変化は、治療区域38内の患者身体の肉厚の変化によることもあり得る。
【0063】
上で論じられているその様なトポセラピー送達の様な幾つかの事例では、高効率な送達にはカウチ82の速度の変調それ自体で十分である。カウチ82変調のみを有する治療送達の事例では、回転変調が大域変調より小さい因数
【0064】
【数4】
【0065】
を利用すれば、我々はなお幾らかの効率性を手に入れることができる。このことは、回避構造が或る特定の回転に限って打たれる、全身照射又は放射線手術の事例の様な、非常に長い標的38の体積にとっては、非常に有益となろう。このモードでは、ガントリー18は固定速度で回転することができ、一方、それぞれの回転についてのカウチ82の速度は、
【0066】
【数5】
【0067】
残りの変調は、マルチリーフコリメーター62によって行われることになる。この作動モードでは、送達線量はなお計画線量と同じになるが、
【0068】
【数6】
【0069】
に変化する(例えば、20cm半径の患者身体で、PTVが長さ80cm、広域変調因数
【0070】
【数7】
【0071】
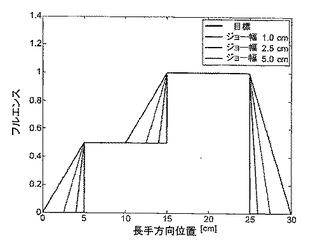
もう1つの実施形態では、ジョー42の幅(又は別の言い方をすれば、ジョー開口50の寸法)は、標的38の治療中、動的に改変される。現在の治療方法は、一般的に、特定の標的38又は患者14への治療の送達用に設定されたジョー幅50の使用を組み込んでいる。現在の治療方法では、一般的に、カウチ82の速度も一定に保たれる。限定された数の固定ジョー幅を使用して患者14へ放射線を送達することには、放射線を無駄使いして、送達プロセスの効率を悪化させるという欠点があり、患者14を有効に治療するのに、より長時間に亘って放射線ビームを活動状態に保つ必要があるせいで、システム10の或る特定の構成要素(例えばマルチリーフコリメーター62の諸部分など)に過早廃棄処分となる失陥を来しかねない。更に、ジョー幅50が固定されていると、標的38に隣接する正常組織が放射線の立ち上がり線量を受けることになってしまい、それにより、必要より多くの放射線が当該正常組織に送達されてしまう。小さい固定ジョー幅50(例えば1cmなど)を使用すれば、立ち上がり長さを縮小し、長手方向の線量の整合を改善する助けとなり得るが、より小さいジョー幅50は、より緩慢(且つより非効率)な送達をもたらす。送達時間を縮めるには、放射線ビームを更に一杯まで利用するために、ジョー46をできる限り広く開口するのが最適である。図13は、固定ジョー幅療法で異なるジョー幅50を用いた場合の目標長手方向フルエンス分布対送達分布の比較のグラフ表示である。
【0072】
患者14への治療計画の送達中にジョー幅50を動的に調節することは、より高い効率とスループットを実現するのみならず、治療送達の所望の長手方向線量整合を維持する。動的ジョー送達法は、異なるビームフルエンス要件に対して様々なジョー幅50を利用する能力を有している。より少ない強度変調(及びより低い長手方向解像度)で済ませられる領域には、より大きなジョー幅50を使用して、治療効率を上げることができる。より多くの変調(及びより高い長手方向解像度)が要求される領域には、より詰まったジョー幅50が使用される。一部の人々にランニングスタート・アンド・ストップ法と呼ばれている1つの代わりの治療方法は、治療区域(例えば標的38)の始まりと終わりの動的ジョー動作の使用を組み込んでおり、なお且つ、治療の送達中の治療区域38の中間の時点では、ジョー46は固定幅に維持される。図14は、ランニングスタート・アンド・ストップ送達で異なるジョー幅を使用した場合の目標長手方向フルエンス分布対送達分布のグラフ比較である。
【0073】
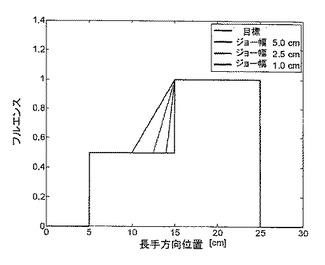
しかしながら、治療中のジョー46の幅を動的に調節することの利点は、ジョーを標的38の治療区域の全域に沿って動的に調節したときがより一層顕著である。例えば、図15は、動的ジョー療法のこの型式で任意のジョー幅50を使用した場合の目標長手方向フルエンス分布と送達分布を比較しているグラフ表示である。
【0074】
動的ジョー動的カウチ治療送達の或る特定のパラメータを計算するための作業の流れが図17に示されている。最初のステップは、長手方向位置zでの薄片について異なる角度での照射時間を得ることである。その様な情報が、1つ1つの薄片について計算された後、それぞれの薄片の最大照射時間
【0075】
【数8】
【0076】
等しくなるような放射線源24及びジョー54、58の軌道を計算することができる。
【0077】
1つの代わりの治療方法では、治療全期間中、カウチ82の速度を一定に保ったまま、ジョー46の幅50が必要に応じて調節される。もう1つの代わりの方法では、カウチ82の速度も動的に改変され、要求線量率が低いときはより速く、要求線量率が高いときはよりゆっくりと、治療される標的38の様々な部分に沿って動かされる。更に別の代わりの方法では、ジョー幅50は、治療の全期間中、ガントリー回転の中心平面に対して対称的に改変される。動的対称的ジョー治療を使用すれば、より遅いカウチ速度を用いて、動的(非対称的)ジョー治療と同じフルエンス分布を実現し、送達を単純化することができる。カウチ82の速度は、治療送達全体を加速するように変更することもできる。
【0078】
動的ジョー技法は、一般に、より広いジョー幅設定が、より狭いジョー幅を使用している計画と同等の品質の治療計画を提供できるようにする。動的カウチ速度技法は、カウチが、より小さいフルエンスで済ませられる或る特定の領域ではより速く動き、治療送達全体を加速できるようにする。幾つかの事例では(同等の線量整合の治療計画を送達中の)治療時間の短縮は、非動的送達技法と比較した場合60%程にもなる。
【0079】
動的可変ジョー幅を使用した場合、それぞれの投射のビーム強度を見つけることは、マルチリーフコリメーター62のセグメント化の問題である。最適化モジュール118は、この設定での最適化を再公式化する必要がある。
【0080】
【数9】
【0081】
である。
【0082】
以下の単純なセグメント化スキームが使えそうである。まず、MLCリーフ66を1つに限定して考察してみよう、というのも多リーフへの拡張は直進的だからである。1−D線量プロファイルを所与として、ビーム強度は第1の強度になるように選定し、ジョー幅50は、線量プロファイルが落ち込むまでできる限り広く取る。例えば、1−D線量プロファイルが14352であるとすると、我々の送達戦略は、
【0083】
【数10】
【0084】
である。この例では、所与の長さ−5の線量プロファイルは、3つのセグメントに分解される。
【0085】
ソフトウェアプログラム90はまた、放射線療法治療システム10に命令して、治療計画に従って治療計画を患者14に送達させる働きをする治療送達モジュール122も含んでいる。治療送達モジュール122は、治療計画によって規定された処方に一致するよう、送達されるべき放射線ビーム30の適切なパターン、位置、及び強度を計算する。放射線ビーム30のパターンは、変調装置34によって、より具体的にはマルチリーフコリメーターの複数のリーフの動きによって、生成される。治療送達モジュール122は、正準的な、所定の、又はテンプレート的なリーフパターンを利用して、治療パラメータに基づく放射線ビーム30用の適切なパターンを生成することができる。治療送達モジュール122はまた、アクセスすることができる、典型症例のパターンのライブラリであって、放射線ビーム30のパターンを確定するのに現患者データを比較するためのライブラリを含んでいる。
【0086】
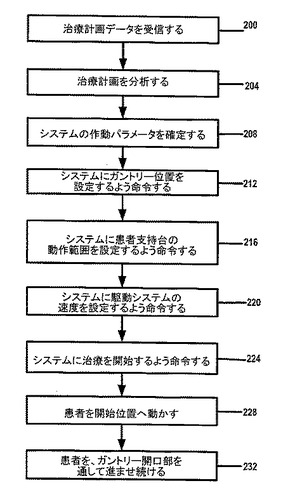
図5は、放射線療法を用いて患者14を治療するための方法の流れ図である。治療計画に基づき、最適化モジュール118は、作動パラメータを設定するために放射線療法治療システム10と通信する。最適化モジュール118は(200で)治療計画モジュール106から治療計画を受信する。最適化モジュール118は(204で)最適化モジュール118へ入力された治療計画及びデータを分析する。治療計画と治療方法に基づき、最適化モジュール118は(208で)放射線療法治療システム10の作動パラメータを確定する。最適化モジュール118は(212で)システム10にガントリー18の位置又は角度を設定するよう命令する。最適化モジュールはまた(216で)システム10にカウチ82の動作範囲を設定するよう命令し、(220で)システム10に駆動システム86の速度を設定するよう命令する。治療が開始された後、駆動システムの速度とカウチ82の方向は、治療送達中に、当初設定された位置から変わる可能性がある。治療送達モジュール122は(224で)システム10に命令し、治療計画に従って放射線療法治療を開始させる。駆動システム86は(228で)患者14をカウチ82によって開始位置まで動かす。治療中、駆動システム86は(232で)患者14をカウチ82によってガントリー開口部を通して進め、その間、ガントリー18は固定位置に留まり、放射線源24は放射線ビーム30を標的38に送達する。
【0087】
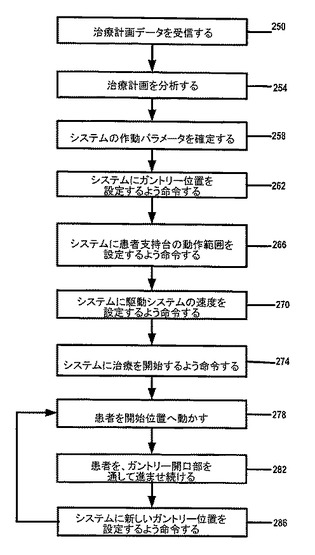
図6は、放射線療法を用いて患者14を治療する方法の流れ図である。治療計画は、患者14がガントリー開口部を複数回通過することと放射線ビームの複数軌跡を要求しているかもしれない。この作動態様では、最適化モジュール118は(250で、治療計画モジュール106から治療計画を受信する。最適化モジュール118は(254で)最適化モジュール118に入力された治療計画とデータを分析する。治療計画と治療方法に基づき、最適化モジュール118は(258で)放射線療法治療システム10の作動パラメータを確定する。最適化モジュールはまた(262で)システム10にガントリー18の位置又は角度を設定するよう命令する。最適化モジュール118は(266で)システム10にカウチ82の動作範囲を設定するよう命令し、(270で)システム10に駆動システム86の速度を設定するよう命令する。治療が開始された後、駆動システムの速度とカウチ82の方向は、治療送達中に、当初設定された位置から変わる可能性がある。治療送達モジュール122は(274で)システム10に命令し、治療計画に従って放射線療法治療を開始させる。駆動システム86は(278で)患者14をカウチ82によって開始位置まで動かす。
【0088】
治療中、駆動システム86は(282で)患者14をカウチ82によって第1の方向にガントリー開口部を通して進ませ、その間、ガントリー18は固定位置に留まり、放射線源24は放射線ビーム30を標的38に送達する。最適化モジュール118は(286で)システム10に、ガントリー18の次の位置と角度を設定するよう命令する。カウチ82の動作範囲と駆動システム86の速度は、2回目のガントリー開口部通過用に更新又は修正される。ステップ278、282、及び286は、治療計画で決められている通り繰り返される。放射線療法治療システム10は、患者14へ送達された放射線の量、カウチ82の動作範囲、治療セッション中に用いられたガントリー角度、及びMLCパラメータの様な、治療の明細事項を記憶することができる。治療終了時に記録されている情報を使用し、以降の治療フラクション用のパラメータを設定することができる。
【0089】
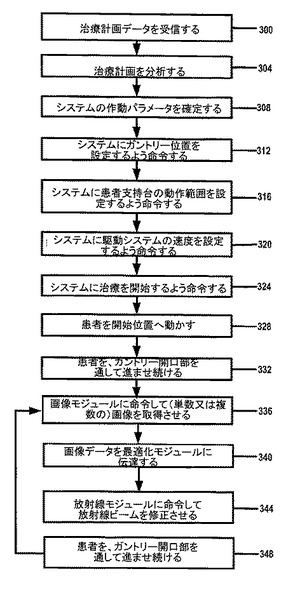
図7は、患者14へ放射線治療を送達するリーフフラッシング法の流れ図である。治療計画に基づき、最適化モジュール118は、作動パラメータを設定するために放射線療法治療システム10と通信する。最適化モジュール118は(300で)治療計画モジュール106から治療計画を受信する。最適化モジュール118は(304で)最適化モジュール118に入力された治療計画とデータを分析する。治療計画と治療方法に基づき、最適化モジュール118は(308で)放射線療法治療システム10の作動パラメータを確定する。最適化モジュール118は(312で)システム10に、ガントリー18の位置又は角度を設定するよう命令する。最適化モジュールはまた、(316で)システム10に、カウチ82の動作範囲を設定するよう命令し、(320で)システム10に、駆動システム86の速度を設定するよう命令する。治療が開始された後、駆動システムの速度とカウチ82の方向は、治療送達中に、当初設定された位置から変わる可能性がある。治療送達モジュール122は(324で)システム10に命令し、治療計画に従って放射線療法治療を開始させる。駆動システム86は(328で)患者14をカウチ82によって開始位置まで動かす。
【0090】
治療中、駆動システム86は(332で)患者14をカウチ82によってガントリー開口部を通して進め、その間、ガントリー18は固定位置に留まり、放射線源24は放射線ビーム30を標的38に送達する。治療中、カウチ82が減速されるか停止されるかしている間に、最適化モジュール118は(336で)画像モジュール114に命令して、患者14の少なくとも一部分の(単数又は複数の)画像を取得させる。患者14が放射線治療を受けてゆく際、呼吸の様な患者14の身体機能のせいで、標的38は変化する可能性がある。画像モジュール114は(340で)取得された画像データを最適化モジュール118に伝達する。最適化モジュール118は(344で)放射線モジュール22に命令して、放射線ビーム30を、画像データに基づく標的38の変化に対応するように修正させる。往々にして、放射線ビーム30のパラメータは、患者の解剖学的構造の変化のせいで、より広い標的38を網羅するように調節される。最適化モジュール118は(348で)カウチ82に命令して、規定された速度又は作動を再開させる。治療全体を通して患者の解剖学的構造が変化すると、ステップ336、340、344、及び348が、治療計画に従って繰り返される。
【0091】
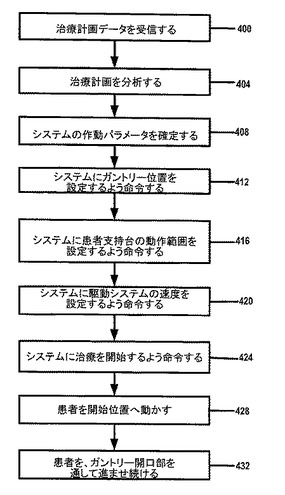
図8は、放射線治療を送達するための動的正接法の流れ図である。治療計画に基づき、最適化モジュール118は、作動パラメータを設定するため、放射線療法治療システム10と通信する。最適化モジュール118は(400で)治療計画モジュール106から治療計画を受信する。最適化モジュール118は(404で)最適化モジュール118に入力された治療計画とデータを分析する。治療計画と治療方法に基づき、最適化モジュール118は(408で)放射線療法治療システム10の作動パラメータを確定する。最適化モジュール118は(412で)システム10に、ガントリー18の走行の経路を画定するためにガントリー18の第1位置と第2位置を設定するよう命令する。最適化モジュールはまた、(416で)システム10に、カウチ82の動作範囲を設定するよう命令し、(420で)システム10に、駆動システム86の速度を設定するよう命令する。治療が開始された後、駆動システムの速度とカウチ82の方向は、治療送達中に、当初設定された位置から変わる可能性がある。1つの態様では、ガントリー18の角速度は、カウチ82がカウチ82の動作範囲によって画定されている終了位置に到るのと実質的に同時に、ガントリー18が第2位置に到るように確定されることになる。治療送達モジュール122は(424で)システム10に命令し、治療計画に従って放射線療法治療を開始させる。駆動システム86は(428で)患者14をカウチ82によって開始位置まで動かす。治療中、駆動システム86は(432で)患者14をカウチ82によってガントリー開口部を通して進め、その間、ガントリー18は第1位置から第2位置へ回転し、放射線源24は放射線ビーム30を標的38に送達する。
【0092】
上述の様に、患者14が治療を受けている間、最適化モジュール118は、画像モジュール114に命令して、患者14の(単数又は複数の)画像を取得させることができる。画像モジュール114は、取得された画像データを最適化モジュール118に転送することができる。最適化モジュール118は、放射線モジュール22に命令して、放射線ビーム30を、画像データに基づく標的38の変化に対応するように修正させることができる。同じく上述の様に、治療の明細事項は、以降の治療フラクションで使用されるように記録されてもよい。
【0093】
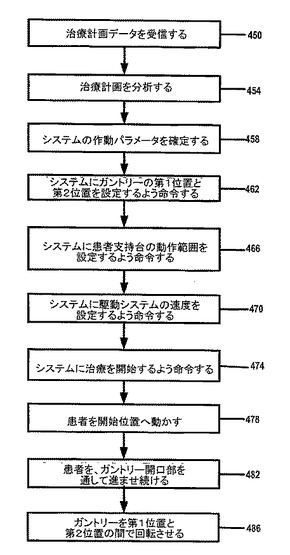
図9は、患者14に放射線治療を送達するための揺動ガントリー法の流れ図である。治療計画に基づき、最適化モジュール118は、作動パラメータを設定するため、放射線療法治療システム10と通信する。最適化モジュール118は(450で)治療計画モジュール106から治療計画を受信する。最適化モジュール118は(454で)最適化モジュール118に入力された治療計画とデータを分析する。治療計画と治療方法に基づき、最適化モジュール118は(458で)放射線療法治療システム10の作動パラメータを確定する。最適化モジュール118は(462で)システム10に、ガントリー18の走行の経路を画定するためにガントリー18の第1位置と第2位置を設定するよう命令する。最適化モジュールはまた(466で)システム10にカウチ82の動作範囲を設定するよう命令し、(470で)システム10に駆動システム86の速度を設定するよう命令する。治療が開始された後、駆動システムの速度とカウチ82の方向は、治療送達中に、当初設定された位置から変わる可能性がある。治療送達モジュール122は(474で)システム10に命令し、治療計画に従って放射線療法治療を開始させる。駆動システム86は(478で)患者14をカウチ82によって開始位置まで動かす。治療中、駆動システム86は(482で)患者14をカウチ82によってガントリー開口部を通して進め、その間、ガントリー18は(486で)第1位置と第2位置の間で回転し、放射線源24は放射線ビーム30を標的38に送達する。
【0094】
上述の様に、患者14が治療を受けている間、最適化モジュール118は、画像モジュール114に命令して、患者14の(単数又は複数の)画像を取得させることができる。画像モジュール114は、取得された画像データを最適化モジュール118に転送することができる。最適化モジュール118は、放射線モジュール22に命令して、放射線ビーム30を、画像データに基づく標的38の変化に対応するように修正させることができる。同じく上述の様に、治療の明細事項は、以降の治療フラクションで使用されるように記録されてもよい。
【0095】
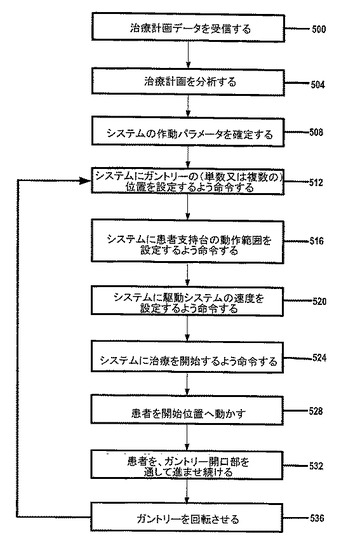
図10は、2つ以上の放射線療法送達法を組み込むこともできる、多領域治療方法の流れ図である。治療計画に基づき、最適化モジュール118は、作動パラメータを設定するため、放射線療法治療システム10と通信する。最適化モジュール118は(500で)治療計画モジュール106から治療計画を受信する。最適化モジュール118は(504で)最適化モジュール118に入力された治療計画とデータを分析する。治療計画と治療方法に基づき、最適化モジュール118は(508で)治療されるべき標的38のそれぞれについて放射線療法治療システム10の作動パラメータを確定する。治療されるべき第1の標的38に基づき、最適化モジュール118は(512で)システム10に、ガントリー18の走行の経路を画定するためにガントリー18の第1位置と第2位置を設定するよう命令する。最適化モジュールはまた、(516で)システム10に、カウチ82の動作範囲を設定するよう命令し、(520で)システム10に、駆動システム86の速度を設定するよう命令する。
【0096】
治療が開始された後、駆動システムの速度とカウチ82の方向は、治療送達中に、当初設定された位置から変わる可能性がある。治療送達モジュール122は(524で)システム10に命令し、治療計画に従って放射線療法治療を開始させる。駆動システム86は(528で)患者14をカウチ82によって開始位置まで動かす。治療中、駆動システム86は(532で)患者14をカウチ82によってガントリー開口部を通して進め、その間、ガントリー18は(536で)第1位置と第2位置の間を回転し、放射線源24は放射線ビーム30を標的38に送達する。第1の標的38が治療された後、カウチ82を減速させるか停止させるかし、第2の標的38についてステップ512−536が繰り返される。第2の標的38は、上述の異なる治療方法(例えば、トポセラピー、動的正接、揺動ガントリーなど)に基づく治療を受けることができる。
【0097】
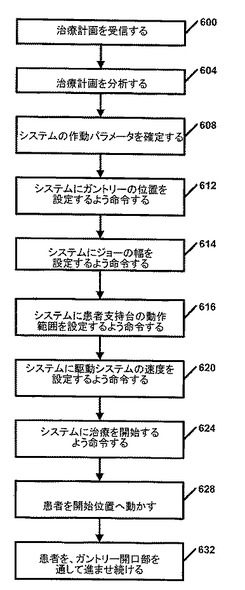
図11は、放射線療法を用いて患者14を治療する動的ジョー法の流れ図である。治療計画に基づき、最適化モジュール118は、作動パラメータを設定するため、放射線療法治療システム10と通信する。最適化モジュール118は(600で)治療計画モジュール106から治療計画を受信する。治療計画は、上述の方法に従って事前に最適化されていてもよい。最適化モジュール118は(604で)最適化モジュール118に入力された治療計画とデータを分析する。治療計画と治療方法に基づき、最適化モジュール118は(608で)放射線療法治療システム10の作動パラメータを確定する。最適化モジュール118は(612で)システム10に、ガントリー18の開始位置又は角度を設定するよう命令し、(614で)システム10に、ジョー46の開始幅を設定するよう命令する。最適化モジュールはまた、(616で)システム10に、カウチ82の動作範囲を設定するよう命令し、(620で)システム10に、駆動システム86の開始速度を設定するよう命令する。治療が開始された後、駆動システムの速度とカウチ82の方向及び/又はジョー46の幅は、治療送達中に、最適化モジュール118からの情報に基づいて、当初設定された位置から変わる可能性がある。治療送達モジュール122は(624で)システム10に命令し、治療計画に従って放射線療法治療を開始させる。駆動システム86は(628で)患者14をカウチ82によって開始位置まで動かす。治療中、駆動システム86は(632で)患者14をカウチ82によってガントリー開口部を通して進め、その間、ガントリー18は固定位置に留まり、放射線源24は放射線ビーム30を標的38に送達する。
【0098】
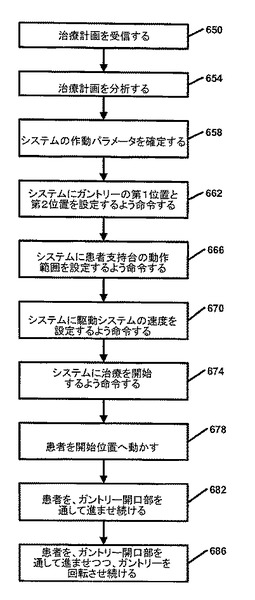
図12は、移動ガントリーを利用して患者14に放射線治療を送達するための動的ジョー法の流れ図である。治療計画に基づき、最適化モジュール118は、作動パラメータを設定するため、放射線療法治療システム10と通信する。最適化モジュール118は(650で)治療計画モジュール106から治療計画を受信する。最適化モジュール118は(654で)最適化モジュール118に入力された治療計画とデータを分析する。治療計画と治療方法に基づき、最適化モジュール118は(658で)放射線療法治療システム10の作動パラメータを確定する。最適化モジュール118は(662で)システム10に、ガントリー18の走行の経路を画定するガントリー18の第1位置と第2位置を設定するよう命令する。最適化モジュールはまた、(666で)システム10に、カウチ82の動作範囲を設定するよう命令し、(670で)システム10に、駆動システム86の開始速度を設定するよう命令する。治療が開始された後、駆動システムの速度とカウチ82の方向に加え、ジョー46の幅及び/又はガントリー18の速度は、治療送達中に、当初設定された位置から変わる可能性がある。治療送達モジュール122は(674で)システム10に命令し、治療計画に従って放射線療法治療を開始させる。駆動システム86は(678で)患者14をカウチ82によって開始位置まで動かす。治療中、駆動システム86は(682で)患者14をカウチ82によってガントリー開口部を通して進め、その間、ガントリー18は(686で)回転し、放射線源24は放射線ビーム30を標的38に送達する。
【0099】
上述の様に、患者14が治療を受けている間、最適化モジュール118は、画像モジュール114に命令して、患者14の(単数又は複数の)画像を取得させることができる。画像モジュール114は、取得された画像データを最適化モジュール118に転送することができる。最適化モジュール118は、放射線モジュール22に命令して、放射線ビーム30を、画像データに基づく標的38の変化に対応するように修正させることができる。同じく上述の様に、治療の明細事項は、以降の治療フラクションで使用されるように記録されてもよい。
【0100】
患者の1回目の治療後、同じ治療計画を今後の治療に使用することができる。治療計画の以降のフラクションを修正又は最適化することができる。例えば、治療計画は、解剖学的構造変化を加味して、及びプロセスの誤差を是正するように、修正されることがある。また、治療計画の以降のフラクションは(単数又は複数の)標的38に送達された累積線量を加味して修正されることもある。治療計画のフラクションは、変形及び生物学的情報の効果を組み込んで修正されることもある。治療計画のフラクションは、初期に取得されたCT画像に基づき、又は以降に取得されたCT画像に基づき、更に修正されることもある。幾つかの実施形態では、システム10は、画像取得フェーズを放射線療法治療計画内へ散在させることができる。これは、ヘリカル又はトポグラフィー治療中にカウチを停止させて画像を収集(そして同時に、患者への放射線をゲーティング、停止、又は遮断)することにより、多回通過治療の通過と通過の間に画像化することにより、ステップアンドシュート型送達のガントリー角度と角度の間又はポータルとポータルの間に画像化することにより、又はIMAT送達の円弧と円弧の間に画像化することにより、行われる。システム10はまた、治療の検証を、治療計画の送達と並行して行われる線量計算を通して、検出器出口データを組み入れた線量再構築を通して、治療中の患者動作の測定値に基づく4D画像での線量の再計算を通して、リアルタイムでの、又は4D線量計算及び/又は4D線量計算の計画された送達に対する比較に基づき遡及的に行われる、治療計画の修正を通して、提供することができる。出口データの使用を通した線量再構築の場合は、出口データは、例えば、単列気体イオン化検出器(例えば、キセノン)、多列気体イオン化検出器、結晶検出器、固体検出器、フラットパネル検出器(例えば、アモルファスシリコン又はセレニウム)、又は他の適した検出装置からもたらされ得る。
【0101】
本発明の様々な特徴は以下の特許請求の範囲に示されている。
【符号の説明】
【0102】
10 放射線療法治療システム
14 患者
18 ガントリー
22 放射線モジュール
24 放射線源
26 線形加速器
30 放射線のビーム
34 変調装置
38 標的
42 照準装置
46 ジョー
50 ジョー開口
54 上ジョー
58 下ジョー
62 マルチリーフコリメーター
66 インターレース型リーフ
70 アクチュエータ
74 コンピュータ
78 検出器
82 カウチ
84 軸
86 駆動システム
90 ソフトウェアプログラム
94 ネットワーク
98 データベース
102 サーバー
106 治療計画モジュール
110 患者位置決めモジュール
114 画像モジュール
118 治療最適化モジュール
122 治療送達モジュール
【技術分野】
【0001】
本発明は、放射線療法システムを使用して患者の治療区域に放射線療法治療計画を送達する方法に関する。
(関連出願)
本出願は、2005年7月23日に出願されている米国仮特許出願第60/701,585号「ガントリーとカウチとマルチリーフコリメーターの協調動作を利用した放射線療法の画像化及び送達」に対し優先権を主張している、2006年7月21日出願の米国特許出願第11/459,161号の一部継続出願であり、同出願に対する優先権を主張する。両出願の全内容を参考文献としてここに援用する。
【背景技術】
【0002】
従来の放射線療法では、患者は静止した治療カウチの上に寝かされ、静止した治療ガントリーによって治療される。多くの場合、放射線ビームを整形するのに、静止したブロックがビームの中へ挿入される。放射線療法が進歩するにつれ、治療の質を高め、治療をより効果的に送達しようとする動きが持ち込まれている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】米国仮特許出願第60/701,585号
【特許文献2】米国特許出願第11/459,161号
【発明の概要】
【0004】
放射線療法の分野の1つの方法には、患者カウチと放射線源を保持しているガントリーとを静止させたまま、同時にマルチリーフコリメーター(「MLC」)のリーフを動かすことが伴う。これは、動的MLC又はスライディングウインドウ技法と呼ばれ、一連の固定されたMLCパターンの送達効率を高めることができる。もう1つの方法は、MLC動作と並行して弧を描きながらガントリーを回転させるというものである。これは、強度変調振子療法(「IMAT」)と呼ばれている。軸方向放射線療法は、MLC動作を、ガントリー回転及び回転と回転の合間のカウチ移動と組み合わせている。更に進歩型のバージョンは、ヘリカル放射線療法として知られているもので、カウチをMLC動作及びガントリー回転と並行して同時に動かすことが伴う。ガントリー回転と患者の並進が組み合わされる結果、放射線源は、患者周りに螺旋状の軌跡をたどる。
【0005】
1つの実施形態では、本発明は、患者の画像化と放射線療法治療の両方を、放射線療法構成要素の新規で進歩した動作軌跡を通して行う諸方法を提供している。これらの方法は、同時に起こるカウチとMLC動作とガントリー回転を使用して治療を送達し且つ画像化をもたらす新規なやり方を含んでいる。
【0006】
本発明の1つの実施形態は、放射線療法システムを使用して、患者の治療区域に放射線療法治療計画を送達する或る方法を含んでいる。放射線療法システムは、患者を支持するための可動式支持台と、支持台に対して動かすことができるガントリーとを含み、ガントリーは、放射線源と、或るジョー幅を有するジョーのセットと、治療計画の送達中に放射線を変調するためのマルチリーフコリメーターとを支持している。本方法は、治療区域への治療計画の送達中、支持台を軸に沿って動かす段階と、治療区域への治療計画の送達中、ジョーの幅を動的に調節する段階を含んでいる。ジョーの幅の調節は、治療区域への治療計画の送達全体に沿って行うことができる。
【0007】
もう1つの実施形態では、本発明は、放射線療法システムを使用して、患者の治療区域に放射線療法治療計画を送達する或る方法を提供している。放射線療法システムは、患者を支持するための可動式支持台と、支持台に対して動かすことができるガントリーとを含み、ガントリーは、放射線源と、或るジョー幅を有するジョーのセットと、治療計画の送達中に放射線を変調するためのマルチリーフコリメーターとを支持している。本方法は、治療区域への治療計画の送達中に支持台を或る軸に沿って変化する速度で動かす段階と、治療計画の送達中にガントリーを支持台に対して変化する速度で動かす段階を含んでいる。
【0008】
本発明の他の態様は、詳細な説明及び添付図面を考察することにより明らかになるであろう。
【図面の簡単な説明】
【0009】
【図1】放射線療法治療システムの斜視図である。
【図2】図1に示されている放射線療法治療システムで使用することができるマルチリーフコリメーターの斜視図である。
【図3】図1の放射線療法治療システムの概念図である。
【図4】放射線療法治療システムで使用されるソフトウェアプログラムの概略線図である。
【図5】本発明の1つの実施形態による、患者に放射線療法治療を送達する方法の流れ図である。
【図6】本発明の1つの実施形態による、患者に放射線療法治療を送達する方法の流れ図である。
【図7】本発明の1つの実施形態による、患者に放射線療法治療を送達する方法の流れ図である。
【図8】本発明の1つの実施形態による、患者に放射線療法治療を送達する方法の流れ図である。
【図9】本発明の1つの実施形態による、患者に放射線療法治療を送達する方法の流れ図である。
【図10】本発明の1つの実施形態による、患者に放射線療法治療を送達する方法の流れ図である。
【図11】本発明の1つの実施形態による、患者に放射線療法治療を送達する方法の流れ図である。
【図12】本発明の1つの実施形態による、患者に放射線療法治療を送達する方法の流れ図である。
【図13】固定ジョー療法で異なるジョー幅を使用した場合の目標放射線フルエンス分布対送達放射線フルエンス分布の比較のグラフ表示である。
【図14】ランニングスタート・アンド・ストップ療法で異なるジョー幅を使用した場合の目標放射線フルエンス分布対送達放射線フルエンス分布のグラフ表示である。
【図15】動的ジョー療法で任意のジョー幅を使用した場合の目標放射線フルエンス分布対送達放射線フルエンス分布のグラフ表示である。
【図16】動的カウチ治療送達対定速カウチ治療送達の放射線源及びジョー軌跡の比較のグラフ図解である。
【図17】動的ジョー動的カウチ療法送達の或る特定のパラメータを計算する場合の作業の流れの描写である。
【発明を実施するための形態】
【0010】
本発明の実施形態について詳細に説明する前に、本発明は、その適用においては、以下の記述に述べられ又は以下の図面に示されている構造の詳細事項及び構成要素の配列に限定されないものと理解されたい。本発明は、他の実施形態でも実現可能であり、様々なやり方で実践又は実施することができる。更に、ここに使用されている語句及び用語の言い回しは、説明を目的としたものであり、限定を課すものと見なされるべきではないと理解されたい。「含んでいる」、「備えている」、又は「有する」、及びそれらの変形がここで使用されている場合、それらは、その後に掲げられている項目及びそれらの等価物並びに追加の項目を網羅するものとする。別途指定又は限定のない限り、「取り付けられている」、「接続されている」、「支持されている」、及び「連結されている」という用語並びにそれらの変形は、広義に使用されており、直接的と間接的の両方の取り付け、接続、支持、及び連結を網羅する。更に、「接続されている」、及び「連結されている」は、物理的又は機械的な接続又は連結に限定されない。
【0011】
ここでは図面を記述する際に、上、下、下方、上方、後方、底部、前部、後部などの様な方向に関する言及がなされているが、これらの言及は、便宜上、(垂直に見た)図面に対してなされている。これらの方向は、文字通りに解釈されることも、本発明を何らかの形態に限定することも、意図していない。更に、ここでは説明を目的として「第1」、「第2」、及び「第3」の様な用語が使用されているが、これらには相対的な重要性又は有意性を暗示又は示唆する意図はない。
【0012】
更に、本発明の実施形態は、ハードウェアとソフトウェアの両方、及び電子構成要素又はモジュールを含んでおり、それらは、考察を目的として、構成要素の大多数があたかも単独でハードウェアに実装されているかの様に示されたり説明されたりすることもあるものと理解されたい。しかしながら、当業者においては、この詳細な説明から読み取られた事柄に基づき、少なくとも1つの実施形態では、本発明の電子ベースの態様をソフトウェアで実装してもよいことが認識されるであろう。よって、本発明を実装するのに、複数のハードウェア及びソフトウェアベースの装置、並びに複数の異なる構造の構成要素が利用されてもよいことに留意されたい。更に、後段に記述している様に、図面に示されている特定の機械的構成は、本発明の実施形態を例示することを意図したものであり、他の代わりの機械的構成も実施可能である。
【0013】
図1は、患者14に放射線療法を提供することができる放射線療法治療システム10を示している。放射線療法治療は、光子ベースの放射線療法、近接照射療法、電子ビーム療法、光子線又は中性子線又は粒子線療法、又は他の型式の治療方法を含むことができる。放射線療法治療システム10は、ガントリー18を含んでいる。ガントリー18は、放射線モジュール22を支持することができ、同モジュールは、放射線源24と、放射線のビーム30を生成する働きをする線形加速器26を含むことができる。図面に示されているガントリー18は、リングガントリー、即ち全360°の円弧に亘って広がって完全なリング又は円を作り出しているものであるが、他の型式の取り付け配置構造を採用することもできる。例えば、C字型、部分リングガントリー、又はロボットアームの様な、非リング形状のガントリーを使用することもできるであろう。放射線モジュール22を、患者14に対して様々な回転方向及び軸方向位置に位置決めすることのできる何か他の骨組みを採用してもよい。更に、放射線源24は、ガントリー18の形状に沿わない経路を進んでもよい。例えば、図示のガントリー18が概ね円形の形状であっても、放射線源24には非円形経路を進ませることができる。
【0014】
放射線モジュール22は、更に、放射線ビーム30を修正又は変調する働きをする変調装置34を含むことができる。変調装置34は、放射線ビーム30の変調を提供し、放射線ビーム30を患者14に向けて方向決めする。具体的には、放射線ビーム30は、患者の一部分に向けて方向決めされる。広義に言うと、当該部分には全身を含めてもよいが、全身よりも小さい場合が一般的であり、二次元的な面積及び/又は三次元的な体積によって定義することができる。放射線を受けさせたい部分、これを標的38又は標的領域と呼んでもよく、関心領域の一例である。もう1つの種類の関心領域に要注意領域がある。或る部分に要注意領域が含まれている場合は、放射線ビームは当該要注意領域から逸らされるのが望ましい。患者14は、放射線療法を受ける必要がある標的領域を2つ以上有していることもある。その様な変調は、時に、強度変調放射線療法(「IMRT」)と呼ばれることもある。
【0015】
変調装置34は、図2に示されている照準装置42を含むことができる。照準装置42は、放射線ビーム30を通過させる開口50の寸法を画定及び調節するジョー46のセットを含んでいる。ジョー46は、上ジョー54と下ジョー58を含んでいる。上ジョー54と下ジョー58は、開口50の寸法を調節するために可動になっている。
【0016】
図2に示されている1つの実施形態では、変調装置34は、強度変調を提供するため、次々に位置を移動する働きをする複数のインターレース型リーフ66を含んでいるマルチリーフコリメーター62を備えることができる。更に、リーフ66は、最小開位置と最大開位置の間の何処の位置へも動かせることに留意されたい。複数のインターレース型リーフ66は、放射線ビーム30が患者14の標的38に到達する前に、放射線ビーム30の強さ、寸法、及び形状を変調する。リーフ66のそれぞれは、リーフ66が素早く開閉して放射線の通過を許可又は阻止できるように、モーター又は空気弁の様なアクチュエータ70により独立的に制御されている。アクチュエータ70は、コンピュータ74及び/又は制御装置によって制御することができる。
【0017】
放射線療法治療システム10は、更に、放射線ビーム30を受ける働きをする検出器78、例えばキロ電圧又はメガ電圧検出器、を含むことができる。線形加速器26と検出器78は、患者14のCT画像を生成するコンピュータ断層撮影(CT)システムとして作動することもできる。線形加速器26は、放射線ビーム30を、患者14の標的38に向けて放射する。標的38は、放射線の幾らかを吸収する。検出器78は、標的38によって吸収された放射線の量を検出又は測定する。検出器78は、線形加速器26が患者14の周りを回転して放射線を患者14に向けて放射する際の異なる角度からの吸収データを収集する。収集された吸収データは、吸収データを処理して患者の体組織と臓器の画像を生成するコンピュータ74に送信される。画像は、骨、軟組織、及び血管も示すことができる。
【0018】
CT画像は、扇状幾何学形状、多薄片幾何学形状、又は円錐ビーム幾何学形状を有する放射線ビーム30を用いて取得することができる。また、CT画像は、メガボルト級のエネルギー又はキロボルト級のエネルギーを送達する線形加速器26を用いて取得することもできる。更に、取得されたCT画像は、以前に取得された(放射線療法治療システム10、又は他のCTスキャナ、MRIシステム、及びPETシステムの様な他の画像取得装置からの)CT画像と位置合わせすることもできることに留意されたい。例えば、患者14の以前に取得されたCT画像が、輪郭付けプロセスを経て同定され得た標的を含んでいることもある。患者14の新たに取得されたCT画像を以前に取得されたCT画像と位置合わせすれば、新たなCT画像中に標的38を同定するのに助けとなる。位置合わせプロセスは、堅い又は変形可能な位置合わせツールを使用することができる。
【0019】
幾つかの実施形態では、放射線療法治療システム10は、X線源とCT画像検出器を含むことができる。X線源とCT画像検出器は、画像データを取得するのに上述の線形加速器26及び検出器78と同様の方式で作動する。画像データはコンピュータ74に送信され、そこで処理されて、患者の体組織及び臓器の画像が生成される。
【0020】
放射線療法治療システム10は、更に、患者14を支持するカウチ82(図1に図示)の様な患者支持台を含むことができる。カウチ82は、x、y、又はz方向の少なくとも1つの軸84に沿って動く。本発明の他の実施形態では、患者支持台は、患者の身体の何れかの部分を支持するように適合されている装置であってもよい。患者支持台は、患者の全身を支持しなくてはならないと限定されているわけではない。システム10は、更に、カウチ82の位置を操縦する働きをする駆動システム86を含むことができる。駆動システム86は、コンピュータ74によって制御することができる。
【0021】
図2と図3に示されているコンピュータ74は、様々なソフトウェアプログラム及び/又は通信アプリケーションを実行するためのオペレーテイングシステムを含んでいる。具体的には、コンピュータ74は、放射線療法治療システム10と通信する働きをする(単数又は複数の)ソフトウェアプログラム90を含むことができる。コンピュータ74は、医療従事者がアクセスできるように適合されている何らかの適した入力/出力装置を含むことができる。コンピュータ74は、プロセッサ、I/Oインターフェース、及び記憶装置、又はメモリの様な、典型的なハードウェアを含むことができる。コンピュータ74は、キーボードやマウスの様な入力装置を含むこともできる。コンピュータ74は、更に、モニターの様な標準的出力装置を含むことができる。加えて、コンピュータ74は、プリンタやスキャナの様な周辺機器を含むことができる。
【0022】
コンピュータ74は、他のコンピュータ74及び他の放射線療法治療システム10とネットワーク化させることができる。他のコンピュータ74は、追加の及び/又は異なるコンピュータプログラム及びソフトウェアを含んでいてもよく、ここに記載されているコンピュータ74と同じである必要はない。コンピュータ74と放射線療法治療システム10は、ネットワーク94と通信することができる。コンピュータ74と放射線療法治療システム10は、更に(単数又は複数の)データベース98及び(単数又は複数の)サーバー102と通信することができる。(単数又は複数の)ソフトウェアプログラム90は(単数又は複数の)サーバー102上に常駐させることもできることに留意されたい。
【0023】
ネットワーク94は、如何なるネットーク化技術又はトポロジー、又は技術とトポロジーの組合せに従って構築することもでき、複数のサブネットワークを含むことができる。図3に示されているコンピュータとシステムの間の接続は、ローカルエリアネットワーク(「LAN」)、ワイドエリアネットワーク(「WAN」)、公衆交換電話網(「PSTN」)、無線ネットワーク、イントラネット、インターネット、又はあらゆる他の適したネットワークを通して行うことができる。病院又は保険医療施設では、図3に示されているコンピュータとシステムの間の通信は、ヘルス・レベル・セブン(Health Level Seven)(「HL7」)プロトコル、又は任意のバージョン及び/又は他の必要なプロトコルを備えた他のプロトコル類を通じて行うことができる。HL7は、保険医療環境で電子データを交換する場合の、異なる製造供給元による2つのコンピュータアプリケーション(送信側と受信側)の間のインターフェースの実装を定める標準的なプロトコルである。HL7は、保健医療機関が、異なるアプリケーションシステムからのデータのキーセットを交換できるようにしている。具体的には、HL7は、交換されるべきデータ、やり取りのタイミング、及びアプリケーションへのエラーの連絡を定義することができる。フォーマットは、一般的に汎用性があり、関連のアプリケーションの必要を満たすように構成することができる。
【0024】
図3に示されているコンピュータとシステムの間の通信は、任意のバージョン及び/又は他の必要なプロトコルを備えたDigital Imaging and Communications in Medicine(DICOM)プロトコルを通じて行うこともできる。DICOMは、NEMAによって開発された国際通信標準であり、異なる医療機器間で医用画像関連データを伝送するのに使用されるフォーマットを定義している。DICOM RTは、放射線療法データに特化された標準を指す。
【0025】
図3の二方向矢印は、図3に示されているネットワーク94とコンピュータ74の何れか及びシステム10の何れかとの間の二方向通信及び情報伝送を概略的に表現している。しかしながら、一部の医用コンピュータ機器では、一方向の通信及び情報伝送しか必要でないかもしれない。
【0026】
図4は、ソフトウェアプログラム90の概略図である。ソフトウェアプログラム90は、放射線療法治療プロセスの機能を果たすべく互いに交信し合う複数のモジュールを含んでいる。様々なモジュールは、放射線療法を患者14に送達するのに互いに通信し合うように適合されている。
【0027】
ソフトウェアプログラム90は、医療従事者によるシステム10へのデータ入力に基づいて患者14の治療計画を生成する働きをする治療計画モジュール106を含んでいる。データは、患者14の少なくとも一部分の1つ又はそれ以上の画像(例えば、計画画像及び/又は治療前画像)を含んでいる。治療計画モジュール106は、医療従事者による処方入力に基づき、治療を複数のフラクションに分け、それぞれのフラクション又は治療用の放射線線量を確定する。治療計画モジュール106は、また、標的38の周りに描かれた様々な輪郭に基づいて標的38用の放射線線量も確定する。複数の標的38が存在していることもあるし、それらが同じ治療計画に含まれていることもある。
【0028】
ソフトウェアプログラム90は、更に、患者14を、ガントリー18の等角点に対して、又は特定の治療フラクション用の他の基準に対して、位置決め及び整列させる働きをする患者位置決めモジュール110を含んでいる。患者14がカウチ82に載せられている間に、患者位置決めモジュール110は、患者14の画像を取得し、患者14の現在位置を計画画像又は以前に取得された画像内の患者の位置と比較する。患者の位置を調節する必要があれば、患者位置決めモジュール110が駆動システム86に命令を与えてカウチ82を動かすこともできるし、手動で患者14を新しい位置へ動かすこともできる。
【0029】
1つの態様では、患者位置決めモジュール110は、ガントリー18の等角点又は他の基準に対する患者の位置データを提供するように治療室に配置されているレーザーから、データを受信することができる。レーザーからのデータに基づき、患者位置決めモジュール110は駆動システム86に命令を与え、駆動システム86はカウチ82を動かして、患者14のガントリー18又は他の基準に対する正しい整列を実現する。整列プロセスを支援するのに、レーザー以外の装置及びシステムを使用して患者位置決めモジュール110にデータを提供することもできることに留意されたい。
【0030】
ソフトウェアプログラム90は、更に、患者14の少なくとも一部分の画像を取得する働きをする画像モジュール114を含んでいる。画像モジュール114は、CT画像化装置の様なオンボード画像装置に命令して、所望のプロトコルに従い、治療開始前、治療中、及び治療後の患者14の画像を取得させることができる。1つの態様では、画像モジュール114は、患者14が実質的に治療位置に在る間に患者14の画像を取得する。患者14の治療前画像を取得するのに、他の画像化装置、例えば非定量的なCT、MRI、PET、SPECT、超音波、透過画像化、蛍光透視法、RFベースの局所化など、を使用してもよい。取得された画像は、患者14の位置合わせのために使用することができる。
【0031】
ソフトウェアプログラム90は、治療計画モジュール106により生成された治療計画を最適化する働きをする治療最適化モジュール118を含むことができる。具体的には、最適化モジュール118は、放射線療法治療システム100が治療計画を最適に送達するのに必要なコマンド又は命令を生成する。最適化モジュール118は、患者14が受けようとしている治療の型式及び/又は放射線療法治療システム10の作動モードに基づき、放射線療法治療システム10の作動の様々なパラメータを確定及び選択する働きをする。パラメータの幾つかには、限定するわけではないが、リーフ66の位置、ガントリー角度と角速度、駆動システム86の速度、カウチ82の動作型式、ジョー開口50の寸法、カウチ動作範囲、及び放射線ビーム強度が含まれる。
【0032】
最適化モジュール118は、技術者又は保健医療専門家が、放射線療法治療システム10及び放射線療法を支援する関連装置の作動モードを選択できるようにしている。作動モードは、手動モード、半自動モード、自動モード、又はこれらのモードの組合せを含むことができる。代わりに、ソフトウェアプログラム90及び/又は最適化モジュール118は、放射線治療の特定の段階に関係する放射線療法治療システム10のパラメータを、選択的に調節する働きをするサブモジュールを含むことができる。
【0033】
最適化モジュール118は、治療計画モジュール106と通信して、治療計画に記されている送達されるべき治療の型式に基づき、放射線療法治療システム10用の設定を確定する。治療計画送達の1つの型式では、放射線療法治療システム10は、カウチ82に載せられた患者14を位置決めし、ガントリー18が設定された位置又は角度に維持されている間に、少なくとも1回、カウチ82を少なくとも部分的にガントリー開口部を通して動かすことによって患者14に放射線を送達するように、構成することができる。これは、時に、トポセラピーと呼ばれることもある。患者14の全長がガントリー開口部を通過しなくてはならないわけではなく、むしろ患者の何れかの部分がガントリー開口部を通過するか又は開口部内に横たわっていればよいことに留意されたい。カウチ82は、段階的に、一定の直線動作で、及び/又は両動作型式を組み合わせて、動かすことができることに留意されたい。この態様では、患者14の1回又はそれ以上の少なくとも部分的なガントリー開口部通過について、所望の(単数又は複数の)ガントリー角度を選択することができる。保健医療専門家は、放射線療法治療システム10の他のパラメータを指定することもできる。幾つかの態様では、最適化モジュール118は、患者14のガントリー開口部通過毎に、放射線治療療法システム10のパラメータを自動的に設定することができる。最適化モジュール118によって自動的に設定されるパラメータは、限定するわけではないが、患者14のガントリー18開口部通過回数、(単数又は複数の)ガントリー角度、駆動システムの速度、カウチの動作範囲、ジョー開口45の寸法、及び放射線ビーム強度を含むことができる。
【0034】
最適化モジュール118は、更に、画像モジュール114に命令を与えて、放射線療法治療システム10を使用して患者14のトポグラフィー及び/又は断層撮影画像化を行わせることもできる。最適化モジュール118は、患者14がガントリー開口部を通って進む通過回数、ガントリー角度、駆動システム86の速度、カウチ動作範囲、ジョー開口50の寸法、及び放射線ビーム強度を含め、トポグラフィー及び/又は断層撮影画像化のための各種設定を選択することができる。
【0035】
最適化モジュール118は、走査計画治療モードを含むことができる。走査計画治療モードは、放射線療法治療システム10を使用して中断なしに1回のセッションで、患者14を走査し、治療計画を生成し、患者14を治療する一連の段階を含んでいる。放射線療法治療システム10は、患者14の位置決めと治療計画立案と計画の送達を単一のシステムに統合している。放射線療法のために患者14を医療施設の中の多数の部署に搬送する必要はより少なくなる。システムの統合及び一部の状況では輪郭を同定するのに幾何学的形状が使用されることの成果として、患者14には大凡20分又はそれより短い時間で治療を施すことができる。例えば、カウチ82に載せられた患者14を位置決めするのに約2分、CT画像を取得するのに約3分から約6分、輪郭を同定するのに約3分、治療計画を生成するのに約2分、そして計画を送達するのに約3分かかるはずである。
【0036】
幾つかの態様では、最適化モジュール118は、1回又はそれ以上のトポグラフィー法での通過のための最適化方法を提供する。これらは、ユーザーが手動で実施することもできるし、システム10が自動的に実施することもできる。これらの方法は、好適なガントリー角度、ピッチ、ガントリー速度、ジョー開口、カウチ速度、及び/又はカウチ動作範囲を同定する段階及び/又は最適化する段階を含んでいる。
【0037】
発明のもう1つの実施形態は、標的38を、より広い面積を含むように引き伸ばす段階を含んでいる。このプロセスは、時に、リーフフラッシングと呼ばれることもあり、治療中の患者14の動作に応えて放射線ビーム30の面積を広げることが伴う。例えば、患者14の一部の臓器は、患者14が放射線療法治療を受けている際、拡張したり収縮したりする。リーフフラッシングプロセスは、治療前及び/又は治療中の画像を利用して、治療を必要とする可能性がある標的38周囲の追加の(単数又は複数の)マージンを判定する。例えば、患者14の胸部区域に在る事前に判定されている標的38を、リーフフラッシング手法で治療することができる。胸部区域は、患者14が呼吸すると収縮したり拡張したりする。リーフフラッシング手法は、保健医療専門家が、胸部区域の変化を画像の形態で観察して、放射線療法を、治療全体のうちの少なくとも1フラクション中に標的38の(単数又は複数の)マージンを網羅するよう調節できるようにする。代わりに、最適化モジュール118は、放射線療法治療システム10に、画像を取得し、患者14の解剖学的構造の画像及び予想される変化に基づいて治療を調節することにより、リーフフラッシング手法を自動的に行わせるための命令を含むことができる。最適化モジュール118を実行しているコンピュータ74はまた、トポセラピー治療及び断層撮影画像化を、自動的に、又は資格のある使用者の監督の下に、行ってもよい。
【0038】
治療計画送達のもう1つの型式では、放射線療法治療システム10は、カウチ82に載せられた患者14を位置決めし、ガントリー18が画定されている経路に沿って回転させられている間に、少なくとも1回、カウチ82を少なくとも部分的にガントリー開口部を通して動かすことによって患者14に放射線を送達するように、構成することができる。ガントリー回転の画定されている経路は、短い円弧又は第1位置と第2位置の間であり、第2位置は第1位置と異なっている。画定されている経路は、完全な円に満たない。カウチ82の動きと組み合わされたこの型式のガントリーの動きは、時に、動的正接と呼ばれることもある。
【0039】
患者14は(単数又は複数の)標的38を同定するのを支援する画像を取得するための画像化手法を受ける。(単数又は複数の)画像及び/又は治療計画に基づき、最適化モジュール118は、ガントリー18を走行させる画定された経路の開始角度と終了角度を同定することができる。最適化モジュール118は、カウチ82の動作範囲、螺旋のスペーシング、ジョー開口50の寸法、及び駆動システム86の速度の様な、放射線療法治療システム10の他のパラメータを確定することができる。最適化モジュール118は、放射線療法治療システム10に命令を与え、カウチ82が患者14をガントリー開口部に進入させ通過させてゆく間に、ガントリー18を第1位置又は開始位置から第2位置又は終了位置まで回転させ、放射線ビーム30を標的38に向けて投射させる。
【0040】
動的正接手法は、患者14をガントリー開口部から搬出しながら行うこともできる。例えば、患者14がガントリー開口部を通過して出てゆく際に、ガントリー18を第2位置又は終了位置から第1位置又は開始位置へ回転させることができる。保健医療専門家は、ガントリー開口部を通過させる都度、開始位置、終了位置、駆動システム86の速度、及びカウチ動作範囲の様な作動パラメータを視察し、調節することができる。
【0041】
放射線療法治療システム10は、キラリティー(即ち、螺旋の自軸に対する回転の方向)が共通か逆の何れかの螺旋又は両者の複合の螺旋を使用して、治療計画を送達することができる。逆のキラリティーは、前回の送達通過後の送達通過について、カウチの移動の方向又はガントリー回転の方向の何れかを逆転させることによって実現される。
【0042】
本発明の様々な態様では、治療選択肢として、画像化又は治療中のガントリー速度及び/又は方向を変えること、治療中のカウチ速度及び/又は方向を変えること、ガントリーの方向を切り替える前に治療通過全部を完了すること、患者へより高い又はより低い線量の放射線を送達するためにガントリーの方向を変えること、誤差又は患者動作を補正するためにガントリーの方向を変えること、及び/又は誤差又は患者動作を予想し検出/補正プロセスに遅滞があればそれらを補償するために予測ゲーティングを使用すること、を含むことができる。追加的に、前述の動的正接技法の実施形態は何れも、外部装置を使用して、カウチ82又は患者の同時に起こる離散動作又は連続動作と組み合わせることができる。その様な動作は、離散又は連続の何れでもよく、並進又は移動量を備えている回転の何らかの組合せを用いて、一定又は可変の速度で行うことができる。
【0043】
更なる実施形態は、患者の呼吸パターンの自動検出及び/又は臨床観察を通しての送達の最適化を含んでいる。これは、呼吸の一時停止を手動で設定する段階、又は患者移動装置に基づいて線形加速器又はMLCを自動的にゲーティングする段階を含むことができる。患者の呼吸が治療計画の送達を妨げる場合、例えば患者の呼吸が不安定になった場合には、当該手法は、患者の呼吸が安定するまで放射なしに(ビームをオフにするか又はリーフを閉じて)継続することができる。この場合、システム10は、抜かされた治療領域を記録することができる。抜かされた領域は、やり直し手続きへ積み増され、抜かされた放射線の量及び臨床的必要に応じて適宜(日毎、週毎、月毎など)に実行される。
【0044】
動的正接治療も、断層撮影及び/又はトポグラフィー画像化と組み合わせることができ、その場合、患者14に放射線療法治療を受けさせながら、(単数又は複数の)画像を採取する。画像は、動的正接手法を停止させるか又は減速させ、放射線源24を用いて一画像又は複数画像を取得することにより、取得することができる。一旦、画像が取得されたら、動的正接手法は再開される。幾つかの代替法は、ガントリー18が第1位置に在るときに画像を取得する段階を含んでいる。他の代替法は、ガントリー18の第1位置又は開始位置と第2位置又は終了位置の間の或る角度で画像を取得するものである。治療中に採取された画像に基づき、保健医療専門家は、患者14の次回通過用に放射線療法治療システム10のパラメータを選択的に調節してもよいし、又はこれらのパラメータは自動的に調節されてもよい。代わりに、最適化モジュール118は、第1位置又は開始位置、第2位置又は終了位置、ガントリー速度、カウチ動作範囲、駆動システム86の速度、ジョー開口50の寸法、リーフ66の位置、の様な動的正接パラメータを自動的に設定するための命令を含むことができる。
【0045】
治療計画送達のもう1つの型式では、ガントリー往復動作がカウチ82の動きと組み合わされている。治療計画送達のこの型式では、放射線療法治療システム10は、カウチ82に載せられた患者14を位置決めし、ガントリー18が画定されている経路に沿って往復動作しながら回転している間に、少なくとも1回、カウチ82を少なくとも部分的にガントリー開口部を通して動かすことによって患者14に放射線を送達するように、構成することができる。ガントリー回転の画定されている経路は、短い円弧又は第1位置と第2位置の間であり、第2位置は第1位置と異なっている。画定されている経路は、完全な円に満たない。これは、時に、揺動ガントリーと呼ばれることもある。
【0046】
患者14は(単数又は複数の)標的38を同定するのを支援する画像を取得するための画像化手法を受ける。(単数又は複数の)画像及び/又は治療計画に基づき、最適化モジュール118は、ガントリー18を走行させる画定された経路の開始角度と終了角度を同定することができる。最適化モジュール118は、カウチ82の動作範囲、螺旋スペーシング、ジョー開口50の寸法、及び駆動システム86の速度の様な、放射線療法治療システム10の他のパラメータを確定することができる。最適化モジュール118は、放射線療法治療システム10に命令を与え、カウチ82が患者14をガントリー開口部に進入させ通過させてゆく間に、ガントリー18を第1位置又は開始位置と第2位置又は終了位置の間で経路に沿って往復式に回転させ、放射線ビーム30を標的38に向けて投射させる。
【0047】
治療の揺動ガントリー法も、患者14に放射線治療を受けさせながら、(単数又は複数の)画像を採取する、患者の断層撮影又はトポグラフィー画像化を含むことができる。画像は、ガントリー18を開始位置と終了位置の間の或る角度で選択的に停止させ、一画像又は複数画像を取得し、そして治療を再開することによって、取得することができる。治療中に採取された画像に基づき、保健医療専門家は、患者14の次回通過用に放射線療法治療システム10のパラメータを調節することができる。
【0048】
揺動ガントリー手法は、患者14をガントリー開口部から搬出しながら行うこともできる。例えば、患者14がガントリー開口部を通され出てゆく際に、ガントリー18を往復式に第2位置又は終了位置から第1位置又は開始位置へ回転させることができる。保健医療専門家は、ガントリー開口部を通過させる都度、開始位置、終了位置、駆動システム86の速度、及びカウチ動作範囲の様な作動パラメータを視察し、調節することができる。
【0049】
本発明のもう1つの態様は、複数の同定された標的38を抱える患者14に療法を提供するため、放射線療法治療システムのパラメータを調節することを含んでいる。これは、多領域治療と呼ばれ、放射線治療を第1の標的38に提供したら、次の標的38に治療を提供することへ自動的に進むことが伴う。これは、離散する標的38への効率的且つ自動的な治療を提供することができる。標的38は、揺動ガントリー又は動的正接の様な異なる型式の治療を必要としているかもしれない。多領域治療手法は、治療されるべきそれぞれの標的38について、ジョー開口50の寸法、リーフ66の位置、駆動システム86の速度、及びカウチ動作範囲の様なパラメータを自動的に調節することにより、様々な治療型式を組み込むことができる。患者14がガントリー開口部14を1回通過する際、多領域治療手法は、治療順序の合間に患者14の位置を自動的に調節することができる。
【0050】
トポグラフィー画像化を多領域治療手法と併合することもできる。他の治療手法と同様に、放射線療法治療システム10を所望の場所で停止させるか又は減速させて1つ又はそれ以上のCT画像を取得し、その後治療を継続する、というようにしてCT画像を選択的に取得することができる。治療中に採取されたCT画像に基づき、保健医療専門家は、治療されるそれぞれの標的38について治療を選択的に調節することができる。代わりに、最適化モジュール118は、治療されるべき標的38の数を自動的に判定し、それらの標的38の特徴に従ってそれぞれの治療用の放射線療法治療システムのパラメータを調節し、治療と治療の合間に患者14の位置を変える、ための命令を含むことができる。
【0051】
本発明のもう1つの態様は、放射線治療におけるカウチ動作との同時発生円錐ビームCT(「CBCT」)画像化を含んでいる。このプロセスは、ガントリー18の動きと組み合わせることができる。この組合せは、患者14が定速でガントリーへ進入されてゆく際、放射線源24が患者14周りの螺旋状の経路をたどることから、ヘリカル軌跡CBCTと呼ばれる。もう1つの態様は、静止したガントリー18との同時発生カウチ動作である。CBCT画像化の放射線源24は、患者14がカウチ82によって駆動システム86の作用下に定速で動かされている際、定位置を維持する。もう1つの態様は、CBCT画像化の開始角度と終了角度の間のガントリー回転との同時発生カウチ動作である。ガントリー18が開始角度から終了角度へ回転し、患者14がカウチ82によってガントリー開口部を通過させられている間に、CBCT画像を採取することができる。ガントリー18はまた、患者14がカウチ82によって動かされてゆく際、開始角度と終了角度の間を往復動作で回転することができる。
【0052】
本発明のもう1つの態様は、限定するわけではないが、PET、SPECT、又はMRIの様な他の画像化システムとカウチ82の同時発生動作である。代わりに、最適化モジュール118は、同時発生CBCT画像化又は他の画像手法用に放射線療法治療システム10の作動パラメータを自動的に選択することができ、すると所定の条件下でのカウチ82動作が保健医療専門家によって選択されることになる。
【0053】
本発明のもう1つの態様は、放射線療法治療システム10のパラメータを調節して、複数の標的38のCT画像を生成することを含んでいる。具体的には、保健医療専門家は、放射線療法治療のパラメータを調節して、患者14がガントリー開口部を1回通過する間に、標的38のCT画像を取得し、そして次の標的38に進む。CT画像を取得するのに、患者14を1つの領域から次の領域へ搬送することには、駆動システム86の速度、カウチ82の動作範囲、及びガントリー角度の様な、放射線療法治療システムのパラメータを調節することが必要になるかもしれない。代わりに、最適化モジュール118は、自動的に、関心領域のCT画像を取得するための適切なパラメータを設定し、患者14の位置を変え、次の領域又は以降の領域でのCT画像化について適切なパラメータを設定することができる。
【0054】
本発明のもう1つの態様は、治療計画に従った患者14への治療の送達中に、放射線療法治療システム10のパラメータを動的に調節することを含んでいる。治療システム10の或る特定のパラメータ又は構成要素の動的な調節は、マルチリーフコリメーター62のリーフ66の調節と同様のやり方で、患者14(又は、より具体的には標的38)が受ける放射線の量を変調する機能を果たす。
【0055】
1つの実施形態では、治療計画は、治療計画の送達中のカウチ82及び/又はガントリー18の速度の変調を通せば、マルチリーフコリメーター62単独の変調を用いて実現でき得るより一層効率良く送達させることができる。一定のカウチ速度を使用した治療送達では、カウチ62の速度は、治療区域又は標的38内の(当該区域の放射線減衰が高いせいで)最長の照射時間を要する治療部分によって決まる。
【0056】
【数1】
【0057】
ガントリー18の速度は、一定のスレッドピッチが維持されるように、計画されたピッチに従ってカウチ82と同期するように調節することができる。この送達モードでは、送達線量は、計画された線量と実質的に同じになるはずであるが、
【0058】
【数2】
【0059】
に縮まる(例えば、20cm半径の患者身体で、PTVが長さ10cm、広域変調因数
=3の場合)。2.5cmのジョー幅では、通常の送達時間は3x3分=9分間である。
【0060】
【数3】
【0061】
ば、総送達時間は(3×0.1+0.9)×3分=3.6分間に縮まり、即ち、非変調送達(3分)とほぼ同じである。ガントリー18の速度の動的調節は、或る特定の角度で変化のあるフルエンス強度を実現するのにも使用することができる。
【0062】
図13を例として用いると、要求フルエンスレベル又は照射時間は、5cmから15cmの領域では、15cmから25cmの領域より低い。従って、図16にグラフで示されている様に、カウチ82は、この領域ではより速く動くことができる。図16の左の線の組は動的カウチ治療送達を表現しており、右の線の組は、定カウチ速度治療送達を表している。当該領域でのカウチ82の速度を上げると、ジョー54、58の軌道を表している線はより急勾配となり、図16に示されている様に、カウチ82の速度が5cmから15cmの間で上がったとき、全治療時間は短縮する。要求フルエンスレベル/照射時間のその様な変化は、治療区域38内の患者身体の肉厚の変化によることもあり得る。
【0063】
上で論じられているその様なトポセラピー送達の様な幾つかの事例では、高効率な送達にはカウチ82の速度の変調それ自体で十分である。カウチ82変調のみを有する治療送達の事例では、回転変調が大域変調より小さい因数
【0064】
【数4】
【0065】
を利用すれば、我々はなお幾らかの効率性を手に入れることができる。このことは、回避構造が或る特定の回転に限って打たれる、全身照射又は放射線手術の事例の様な、非常に長い標的38の体積にとっては、非常に有益となろう。このモードでは、ガントリー18は固定速度で回転することができ、一方、それぞれの回転についてのカウチ82の速度は、
【0066】
【数5】
【0067】
残りの変調は、マルチリーフコリメーター62によって行われることになる。この作動モードでは、送達線量はなお計画線量と同じになるが、
【0068】
【数6】
【0069】
に変化する(例えば、20cm半径の患者身体で、PTVが長さ80cm、広域変調因数
【0070】
【数7】
【0071】
もう1つの実施形態では、ジョー42の幅(又は別の言い方をすれば、ジョー開口50の寸法)は、標的38の治療中、動的に改変される。現在の治療方法は、一般的に、特定の標的38又は患者14への治療の送達用に設定されたジョー幅50の使用を組み込んでいる。現在の治療方法では、一般的に、カウチ82の速度も一定に保たれる。限定された数の固定ジョー幅を使用して患者14へ放射線を送達することには、放射線を無駄使いして、送達プロセスの効率を悪化させるという欠点があり、患者14を有効に治療するのに、より長時間に亘って放射線ビームを活動状態に保つ必要があるせいで、システム10の或る特定の構成要素(例えばマルチリーフコリメーター62の諸部分など)に過早廃棄処分となる失陥を来しかねない。更に、ジョー幅50が固定されていると、標的38に隣接する正常組織が放射線の立ち上がり線量を受けることになってしまい、それにより、必要より多くの放射線が当該正常組織に送達されてしまう。小さい固定ジョー幅50(例えば1cmなど)を使用すれば、立ち上がり長さを縮小し、長手方向の線量の整合を改善する助けとなり得るが、より小さいジョー幅50は、より緩慢(且つより非効率)な送達をもたらす。送達時間を縮めるには、放射線ビームを更に一杯まで利用するために、ジョー46をできる限り広く開口するのが最適である。図13は、固定ジョー幅療法で異なるジョー幅50を用いた場合の目標長手方向フルエンス分布対送達分布の比較のグラフ表示である。
【0072】
患者14への治療計画の送達中にジョー幅50を動的に調節することは、より高い効率とスループットを実現するのみならず、治療送達の所望の長手方向線量整合を維持する。動的ジョー送達法は、異なるビームフルエンス要件に対して様々なジョー幅50を利用する能力を有している。より少ない強度変調(及びより低い長手方向解像度)で済ませられる領域には、より大きなジョー幅50を使用して、治療効率を上げることができる。より多くの変調(及びより高い長手方向解像度)が要求される領域には、より詰まったジョー幅50が使用される。一部の人々にランニングスタート・アンド・ストップ法と呼ばれている1つの代わりの治療方法は、治療区域(例えば標的38)の始まりと終わりの動的ジョー動作の使用を組み込んでおり、なお且つ、治療の送達中の治療区域38の中間の時点では、ジョー46は固定幅に維持される。図14は、ランニングスタート・アンド・ストップ送達で異なるジョー幅を使用した場合の目標長手方向フルエンス分布対送達分布のグラフ比較である。
【0073】
しかしながら、治療中のジョー46の幅を動的に調節することの利点は、ジョーを標的38の治療区域の全域に沿って動的に調節したときがより一層顕著である。例えば、図15は、動的ジョー療法のこの型式で任意のジョー幅50を使用した場合の目標長手方向フルエンス分布と送達分布を比較しているグラフ表示である。
【0074】
動的ジョー動的カウチ治療送達の或る特定のパラメータを計算するための作業の流れが図17に示されている。最初のステップは、長手方向位置zでの薄片について異なる角度での照射時間を得ることである。その様な情報が、1つ1つの薄片について計算された後、それぞれの薄片の最大照射時間
【0075】
【数8】
【0076】
等しくなるような放射線源24及びジョー54、58の軌道を計算することができる。
【0077】
1つの代わりの治療方法では、治療全期間中、カウチ82の速度を一定に保ったまま、ジョー46の幅50が必要に応じて調節される。もう1つの代わりの方法では、カウチ82の速度も動的に改変され、要求線量率が低いときはより速く、要求線量率が高いときはよりゆっくりと、治療される標的38の様々な部分に沿って動かされる。更に別の代わりの方法では、ジョー幅50は、治療の全期間中、ガントリー回転の中心平面に対して対称的に改変される。動的対称的ジョー治療を使用すれば、より遅いカウチ速度を用いて、動的(非対称的)ジョー治療と同じフルエンス分布を実現し、送達を単純化することができる。カウチ82の速度は、治療送達全体を加速するように変更することもできる。
【0078】
動的ジョー技法は、一般に、より広いジョー幅設定が、より狭いジョー幅を使用している計画と同等の品質の治療計画を提供できるようにする。動的カウチ速度技法は、カウチが、より小さいフルエンスで済ませられる或る特定の領域ではより速く動き、治療送達全体を加速できるようにする。幾つかの事例では(同等の線量整合の治療計画を送達中の)治療時間の短縮は、非動的送達技法と比較した場合60%程にもなる。
【0079】
動的可変ジョー幅を使用した場合、それぞれの投射のビーム強度を見つけることは、マルチリーフコリメーター62のセグメント化の問題である。最適化モジュール118は、この設定での最適化を再公式化する必要がある。
【0080】
【数9】
【0081】
である。
【0082】
以下の単純なセグメント化スキームが使えそうである。まず、MLCリーフ66を1つに限定して考察してみよう、というのも多リーフへの拡張は直進的だからである。1−D線量プロファイルを所与として、ビーム強度は第1の強度になるように選定し、ジョー幅50は、線量プロファイルが落ち込むまでできる限り広く取る。例えば、1−D線量プロファイルが14352であるとすると、我々の送達戦略は、
【0083】
【数10】
【0084】
である。この例では、所与の長さ−5の線量プロファイルは、3つのセグメントに分解される。
【0085】
ソフトウェアプログラム90はまた、放射線療法治療システム10に命令して、治療計画に従って治療計画を患者14に送達させる働きをする治療送達モジュール122も含んでいる。治療送達モジュール122は、治療計画によって規定された処方に一致するよう、送達されるべき放射線ビーム30の適切なパターン、位置、及び強度を計算する。放射線ビーム30のパターンは、変調装置34によって、より具体的にはマルチリーフコリメーターの複数のリーフの動きによって、生成される。治療送達モジュール122は、正準的な、所定の、又はテンプレート的なリーフパターンを利用して、治療パラメータに基づく放射線ビーム30用の適切なパターンを生成することができる。治療送達モジュール122はまた、アクセスすることができる、典型症例のパターンのライブラリであって、放射線ビーム30のパターンを確定するのに現患者データを比較するためのライブラリを含んでいる。
【0086】
図5は、放射線療法を用いて患者14を治療するための方法の流れ図である。治療計画に基づき、最適化モジュール118は、作動パラメータを設定するために放射線療法治療システム10と通信する。最適化モジュール118は(200で)治療計画モジュール106から治療計画を受信する。最適化モジュール118は(204で)最適化モジュール118へ入力された治療計画及びデータを分析する。治療計画と治療方法に基づき、最適化モジュール118は(208で)放射線療法治療システム10の作動パラメータを確定する。最適化モジュール118は(212で)システム10にガントリー18の位置又は角度を設定するよう命令する。最適化モジュールはまた(216で)システム10にカウチ82の動作範囲を設定するよう命令し、(220で)システム10に駆動システム86の速度を設定するよう命令する。治療が開始された後、駆動システムの速度とカウチ82の方向は、治療送達中に、当初設定された位置から変わる可能性がある。治療送達モジュール122は(224で)システム10に命令し、治療計画に従って放射線療法治療を開始させる。駆動システム86は(228で)患者14をカウチ82によって開始位置まで動かす。治療中、駆動システム86は(232で)患者14をカウチ82によってガントリー開口部を通して進め、その間、ガントリー18は固定位置に留まり、放射線源24は放射線ビーム30を標的38に送達する。
【0087】
図6は、放射線療法を用いて患者14を治療する方法の流れ図である。治療計画は、患者14がガントリー開口部を複数回通過することと放射線ビームの複数軌跡を要求しているかもしれない。この作動態様では、最適化モジュール118は(250で、治療計画モジュール106から治療計画を受信する。最適化モジュール118は(254で)最適化モジュール118に入力された治療計画とデータを分析する。治療計画と治療方法に基づき、最適化モジュール118は(258で)放射線療法治療システム10の作動パラメータを確定する。最適化モジュールはまた(262で)システム10にガントリー18の位置又は角度を設定するよう命令する。最適化モジュール118は(266で)システム10にカウチ82の動作範囲を設定するよう命令し、(270で)システム10に駆動システム86の速度を設定するよう命令する。治療が開始された後、駆動システムの速度とカウチ82の方向は、治療送達中に、当初設定された位置から変わる可能性がある。治療送達モジュール122は(274で)システム10に命令し、治療計画に従って放射線療法治療を開始させる。駆動システム86は(278で)患者14をカウチ82によって開始位置まで動かす。
【0088】
治療中、駆動システム86は(282で)患者14をカウチ82によって第1の方向にガントリー開口部を通して進ませ、その間、ガントリー18は固定位置に留まり、放射線源24は放射線ビーム30を標的38に送達する。最適化モジュール118は(286で)システム10に、ガントリー18の次の位置と角度を設定するよう命令する。カウチ82の動作範囲と駆動システム86の速度は、2回目のガントリー開口部通過用に更新又は修正される。ステップ278、282、及び286は、治療計画で決められている通り繰り返される。放射線療法治療システム10は、患者14へ送達された放射線の量、カウチ82の動作範囲、治療セッション中に用いられたガントリー角度、及びMLCパラメータの様な、治療の明細事項を記憶することができる。治療終了時に記録されている情報を使用し、以降の治療フラクション用のパラメータを設定することができる。
【0089】
図7は、患者14へ放射線治療を送達するリーフフラッシング法の流れ図である。治療計画に基づき、最適化モジュール118は、作動パラメータを設定するために放射線療法治療システム10と通信する。最適化モジュール118は(300で)治療計画モジュール106から治療計画を受信する。最適化モジュール118は(304で)最適化モジュール118に入力された治療計画とデータを分析する。治療計画と治療方法に基づき、最適化モジュール118は(308で)放射線療法治療システム10の作動パラメータを確定する。最適化モジュール118は(312で)システム10に、ガントリー18の位置又は角度を設定するよう命令する。最適化モジュールはまた、(316で)システム10に、カウチ82の動作範囲を設定するよう命令し、(320で)システム10に、駆動システム86の速度を設定するよう命令する。治療が開始された後、駆動システムの速度とカウチ82の方向は、治療送達中に、当初設定された位置から変わる可能性がある。治療送達モジュール122は(324で)システム10に命令し、治療計画に従って放射線療法治療を開始させる。駆動システム86は(328で)患者14をカウチ82によって開始位置まで動かす。
【0090】
治療中、駆動システム86は(332で)患者14をカウチ82によってガントリー開口部を通して進め、その間、ガントリー18は固定位置に留まり、放射線源24は放射線ビーム30を標的38に送達する。治療中、カウチ82が減速されるか停止されるかしている間に、最適化モジュール118は(336で)画像モジュール114に命令して、患者14の少なくとも一部分の(単数又は複数の)画像を取得させる。患者14が放射線治療を受けてゆく際、呼吸の様な患者14の身体機能のせいで、標的38は変化する可能性がある。画像モジュール114は(340で)取得された画像データを最適化モジュール118に伝達する。最適化モジュール118は(344で)放射線モジュール22に命令して、放射線ビーム30を、画像データに基づく標的38の変化に対応するように修正させる。往々にして、放射線ビーム30のパラメータは、患者の解剖学的構造の変化のせいで、より広い標的38を網羅するように調節される。最適化モジュール118は(348で)カウチ82に命令して、規定された速度又は作動を再開させる。治療全体を通して患者の解剖学的構造が変化すると、ステップ336、340、344、及び348が、治療計画に従って繰り返される。
【0091】
図8は、放射線治療を送達するための動的正接法の流れ図である。治療計画に基づき、最適化モジュール118は、作動パラメータを設定するため、放射線療法治療システム10と通信する。最適化モジュール118は(400で)治療計画モジュール106から治療計画を受信する。最適化モジュール118は(404で)最適化モジュール118に入力された治療計画とデータを分析する。治療計画と治療方法に基づき、最適化モジュール118は(408で)放射線療法治療システム10の作動パラメータを確定する。最適化モジュール118は(412で)システム10に、ガントリー18の走行の経路を画定するためにガントリー18の第1位置と第2位置を設定するよう命令する。最適化モジュールはまた、(416で)システム10に、カウチ82の動作範囲を設定するよう命令し、(420で)システム10に、駆動システム86の速度を設定するよう命令する。治療が開始された後、駆動システムの速度とカウチ82の方向は、治療送達中に、当初設定された位置から変わる可能性がある。1つの態様では、ガントリー18の角速度は、カウチ82がカウチ82の動作範囲によって画定されている終了位置に到るのと実質的に同時に、ガントリー18が第2位置に到るように確定されることになる。治療送達モジュール122は(424で)システム10に命令し、治療計画に従って放射線療法治療を開始させる。駆動システム86は(428で)患者14をカウチ82によって開始位置まで動かす。治療中、駆動システム86は(432で)患者14をカウチ82によってガントリー開口部を通して進め、その間、ガントリー18は第1位置から第2位置へ回転し、放射線源24は放射線ビーム30を標的38に送達する。
【0092】
上述の様に、患者14が治療を受けている間、最適化モジュール118は、画像モジュール114に命令して、患者14の(単数又は複数の)画像を取得させることができる。画像モジュール114は、取得された画像データを最適化モジュール118に転送することができる。最適化モジュール118は、放射線モジュール22に命令して、放射線ビーム30を、画像データに基づく標的38の変化に対応するように修正させることができる。同じく上述の様に、治療の明細事項は、以降の治療フラクションで使用されるように記録されてもよい。
【0093】
図9は、患者14に放射線治療を送達するための揺動ガントリー法の流れ図である。治療計画に基づき、最適化モジュール118は、作動パラメータを設定するため、放射線療法治療システム10と通信する。最適化モジュール118は(450で)治療計画モジュール106から治療計画を受信する。最適化モジュール118は(454で)最適化モジュール118に入力された治療計画とデータを分析する。治療計画と治療方法に基づき、最適化モジュール118は(458で)放射線療法治療システム10の作動パラメータを確定する。最適化モジュール118は(462で)システム10に、ガントリー18の走行の経路を画定するためにガントリー18の第1位置と第2位置を設定するよう命令する。最適化モジュールはまた(466で)システム10にカウチ82の動作範囲を設定するよう命令し、(470で)システム10に駆動システム86の速度を設定するよう命令する。治療が開始された後、駆動システムの速度とカウチ82の方向は、治療送達中に、当初設定された位置から変わる可能性がある。治療送達モジュール122は(474で)システム10に命令し、治療計画に従って放射線療法治療を開始させる。駆動システム86は(478で)患者14をカウチ82によって開始位置まで動かす。治療中、駆動システム86は(482で)患者14をカウチ82によってガントリー開口部を通して進め、その間、ガントリー18は(486で)第1位置と第2位置の間で回転し、放射線源24は放射線ビーム30を標的38に送達する。
【0094】
上述の様に、患者14が治療を受けている間、最適化モジュール118は、画像モジュール114に命令して、患者14の(単数又は複数の)画像を取得させることができる。画像モジュール114は、取得された画像データを最適化モジュール118に転送することができる。最適化モジュール118は、放射線モジュール22に命令して、放射線ビーム30を、画像データに基づく標的38の変化に対応するように修正させることができる。同じく上述の様に、治療の明細事項は、以降の治療フラクションで使用されるように記録されてもよい。
【0095】
図10は、2つ以上の放射線療法送達法を組み込むこともできる、多領域治療方法の流れ図である。治療計画に基づき、最適化モジュール118は、作動パラメータを設定するため、放射線療法治療システム10と通信する。最適化モジュール118は(500で)治療計画モジュール106から治療計画を受信する。最適化モジュール118は(504で)最適化モジュール118に入力された治療計画とデータを分析する。治療計画と治療方法に基づき、最適化モジュール118は(508で)治療されるべき標的38のそれぞれについて放射線療法治療システム10の作動パラメータを確定する。治療されるべき第1の標的38に基づき、最適化モジュール118は(512で)システム10に、ガントリー18の走行の経路を画定するためにガントリー18の第1位置と第2位置を設定するよう命令する。最適化モジュールはまた、(516で)システム10に、カウチ82の動作範囲を設定するよう命令し、(520で)システム10に、駆動システム86の速度を設定するよう命令する。
【0096】
治療が開始された後、駆動システムの速度とカウチ82の方向は、治療送達中に、当初設定された位置から変わる可能性がある。治療送達モジュール122は(524で)システム10に命令し、治療計画に従って放射線療法治療を開始させる。駆動システム86は(528で)患者14をカウチ82によって開始位置まで動かす。治療中、駆動システム86は(532で)患者14をカウチ82によってガントリー開口部を通して進め、その間、ガントリー18は(536で)第1位置と第2位置の間を回転し、放射線源24は放射線ビーム30を標的38に送達する。第1の標的38が治療された後、カウチ82を減速させるか停止させるかし、第2の標的38についてステップ512−536が繰り返される。第2の標的38は、上述の異なる治療方法(例えば、トポセラピー、動的正接、揺動ガントリーなど)に基づく治療を受けることができる。
【0097】
図11は、放射線療法を用いて患者14を治療する動的ジョー法の流れ図である。治療計画に基づき、最適化モジュール118は、作動パラメータを設定するため、放射線療法治療システム10と通信する。最適化モジュール118は(600で)治療計画モジュール106から治療計画を受信する。治療計画は、上述の方法に従って事前に最適化されていてもよい。最適化モジュール118は(604で)最適化モジュール118に入力された治療計画とデータを分析する。治療計画と治療方法に基づき、最適化モジュール118は(608で)放射線療法治療システム10の作動パラメータを確定する。最適化モジュール118は(612で)システム10に、ガントリー18の開始位置又は角度を設定するよう命令し、(614で)システム10に、ジョー46の開始幅を設定するよう命令する。最適化モジュールはまた、(616で)システム10に、カウチ82の動作範囲を設定するよう命令し、(620で)システム10に、駆動システム86の開始速度を設定するよう命令する。治療が開始された後、駆動システムの速度とカウチ82の方向及び/又はジョー46の幅は、治療送達中に、最適化モジュール118からの情報に基づいて、当初設定された位置から変わる可能性がある。治療送達モジュール122は(624で)システム10に命令し、治療計画に従って放射線療法治療を開始させる。駆動システム86は(628で)患者14をカウチ82によって開始位置まで動かす。治療中、駆動システム86は(632で)患者14をカウチ82によってガントリー開口部を通して進め、その間、ガントリー18は固定位置に留まり、放射線源24は放射線ビーム30を標的38に送達する。
【0098】
図12は、移動ガントリーを利用して患者14に放射線治療を送達するための動的ジョー法の流れ図である。治療計画に基づき、最適化モジュール118は、作動パラメータを設定するため、放射線療法治療システム10と通信する。最適化モジュール118は(650で)治療計画モジュール106から治療計画を受信する。最適化モジュール118は(654で)最適化モジュール118に入力された治療計画とデータを分析する。治療計画と治療方法に基づき、最適化モジュール118は(658で)放射線療法治療システム10の作動パラメータを確定する。最適化モジュール118は(662で)システム10に、ガントリー18の走行の経路を画定するガントリー18の第1位置と第2位置を設定するよう命令する。最適化モジュールはまた、(666で)システム10に、カウチ82の動作範囲を設定するよう命令し、(670で)システム10に、駆動システム86の開始速度を設定するよう命令する。治療が開始された後、駆動システムの速度とカウチ82の方向に加え、ジョー46の幅及び/又はガントリー18の速度は、治療送達中に、当初設定された位置から変わる可能性がある。治療送達モジュール122は(674で)システム10に命令し、治療計画に従って放射線療法治療を開始させる。駆動システム86は(678で)患者14をカウチ82によって開始位置まで動かす。治療中、駆動システム86は(682で)患者14をカウチ82によってガントリー開口部を通して進め、その間、ガントリー18は(686で)回転し、放射線源24は放射線ビーム30を標的38に送達する。
【0099】
上述の様に、患者14が治療を受けている間、最適化モジュール118は、画像モジュール114に命令して、患者14の(単数又は複数の)画像を取得させることができる。画像モジュール114は、取得された画像データを最適化モジュール118に転送することができる。最適化モジュール118は、放射線モジュール22に命令して、放射線ビーム30を、画像データに基づく標的38の変化に対応するように修正させることができる。同じく上述の様に、治療の明細事項は、以降の治療フラクションで使用されるように記録されてもよい。
【0100】
患者の1回目の治療後、同じ治療計画を今後の治療に使用することができる。治療計画の以降のフラクションを修正又は最適化することができる。例えば、治療計画は、解剖学的構造変化を加味して、及びプロセスの誤差を是正するように、修正されることがある。また、治療計画の以降のフラクションは(単数又は複数の)標的38に送達された累積線量を加味して修正されることもある。治療計画のフラクションは、変形及び生物学的情報の効果を組み込んで修正されることもある。治療計画のフラクションは、初期に取得されたCT画像に基づき、又は以降に取得されたCT画像に基づき、更に修正されることもある。幾つかの実施形態では、システム10は、画像取得フェーズを放射線療法治療計画内へ散在させることができる。これは、ヘリカル又はトポグラフィー治療中にカウチを停止させて画像を収集(そして同時に、患者への放射線をゲーティング、停止、又は遮断)することにより、多回通過治療の通過と通過の間に画像化することにより、ステップアンドシュート型送達のガントリー角度と角度の間又はポータルとポータルの間に画像化することにより、又はIMAT送達の円弧と円弧の間に画像化することにより、行われる。システム10はまた、治療の検証を、治療計画の送達と並行して行われる線量計算を通して、検出器出口データを組み入れた線量再構築を通して、治療中の患者動作の測定値に基づく4D画像での線量の再計算を通して、リアルタイムでの、又は4D線量計算及び/又は4D線量計算の計画された送達に対する比較に基づき遡及的に行われる、治療計画の修正を通して、提供することができる。出口データの使用を通した線量再構築の場合は、出口データは、例えば、単列気体イオン化検出器(例えば、キセノン)、多列気体イオン化検出器、結晶検出器、固体検出器、フラットパネル検出器(例えば、アモルファスシリコン又はセレニウム)、又は他の適した検出装置からもたらされ得る。
【0101】
本発明の様々な特徴は以下の特許請求の範囲に示されている。
【符号の説明】
【0102】
10 放射線療法治療システム
14 患者
18 ガントリー
22 放射線モジュール
24 放射線源
26 線形加速器
30 放射線のビーム
34 変調装置
38 標的
42 照準装置
46 ジョー
50 ジョー開口
54 上ジョー
58 下ジョー
62 マルチリーフコリメーター
66 インターレース型リーフ
70 アクチュエータ
74 コンピュータ
78 検出器
82 カウチ
84 軸
86 駆動システム
90 ソフトウェアプログラム
94 ネットワーク
98 データベース
102 サーバー
106 治療計画モジュール
110 患者位置決めモジュール
114 画像モジュール
118 治療最適化モジュール
122 治療送達モジュール
【特許請求の範囲】
【請求項1】
放射線療法システムを使用して患者の治療区域に放射線療法治療計画を送達する方法であって、前記患者を支持するための可動式支持台と、前記支持台に対して動かすことができるガントリーとを含み、前記ガントリーは、放射線源と、或るジョー幅を有するジョーのセットと、前記治療計画の送達中に放射線を変調するためのマルチリーフコリメーターとを支持している、前記放射線療法システムを使用して、患者の治療区域に放射線療法治療計画を送達する方法において、
前記治療区域への前記治療計画の送達中、前記支持台を或る軸に沿って動かす段階と、
前記治療区域への前記治療計画の送達中、前記ジョーの前記幅を動的に調節する段階と、から成り、
前記ジョーの前記幅の調節は、前記治療区域への前記治療計画の前記送達全体に沿って起こり得り、前記ジョーの前記幅を調節すると、前記治療計画の送達中の前記放射線が変調される、方法。
【請求項2】
前記支持台は、前記治療計画の前記送達中に変化する速度で動かされる、請求項1に記載の方法。
【請求項3】
前記ガントリーは、前記治療計画の前記送達中に前記支持台に対して動かされる、請求項1に記載の方法。
【請求項4】
前記ガントリーは、前記治療計画の前記送達中に変化する速度で動かされる、請求項3に記載の方法。
【請求項5】
前記ジョーの前記幅を調節する段階は、前記ジョーを或る平面を中心に対称的に調節することを備えている、請求項1に記載の方法。
【請求項6】
前記支持台は、前記治療計画の前記送達中に変化する速度で動かすことができ、前記ガントリーは、前記治療計画の送達中に変化する速度で動かすことができ、前記ジョーの幅の動的調節と、前記可動式支持台の前記動きの速度を変えることと、前記ガントリーの前記動きの速度を変えることとの任意の組合せは、前記治療計画の前記送達中に同時に行われ得る、請求項1に記載の方法。
【請求項7】
前記支持台は、前記治療計画の前記送達中に一定の速度で動かされる、請求項1に記載の方法。
【請求項8】
放射線療法システムを使用して患者の治療区域に放射線療法治療計画を送達する方法であって、前記患者を支持するための可動式支持台と、前記支持台に対して動かすことができるガントリーとを含み、前記ガントリーは、放射線源と、或るジョー幅を有するジョーのセットと、前記治療計画の送達中に放射線を変調するためのマルチリーフコリメーターとを支持している、前記放射線療法システムを使用して、患者の治療区域に放射線療法治療計画を送達する方法において、
前記治療区域への前記治療計画の送達中、前記支持台を或る軸に沿って変化する速度で動かす段階と、
前記治療計画の前記送達中、前記ガントリーを前記支持台に対して変化する速度で動かす段階と、から成る方法。
【請求項9】
前記治療計画の前記送達中、前記ジョーの幅を動的に調節する段階を更に備えている、請求項8に記載の方法。
【請求項1】
放射線療法システムを使用して患者の治療区域に放射線療法治療計画を送達する方法であって、前記患者を支持するための可動式支持台と、前記支持台に対して動かすことができるガントリーとを含み、前記ガントリーは、放射線源と、或るジョー幅を有するジョーのセットと、前記治療計画の送達中に放射線を変調するためのマルチリーフコリメーターとを支持している、前記放射線療法システムを使用して、患者の治療区域に放射線療法治療計画を送達する方法において、
前記治療区域への前記治療計画の送達中、前記支持台を或る軸に沿って動かす段階と、
前記治療区域への前記治療計画の送達中、前記ジョーの前記幅を動的に調節する段階と、から成り、
前記ジョーの前記幅の調節は、前記治療区域への前記治療計画の前記送達全体に沿って起こり得り、前記ジョーの前記幅を調節すると、前記治療計画の送達中の前記放射線が変調される、方法。
【請求項2】
前記支持台は、前記治療計画の前記送達中に変化する速度で動かされる、請求項1に記載の方法。
【請求項3】
前記ガントリーは、前記治療計画の前記送達中に前記支持台に対して動かされる、請求項1に記載の方法。
【請求項4】
前記ガントリーは、前記治療計画の前記送達中に変化する速度で動かされる、請求項3に記載の方法。
【請求項5】
前記ジョーの前記幅を調節する段階は、前記ジョーを或る平面を中心に対称的に調節することを備えている、請求項1に記載の方法。
【請求項6】
前記支持台は、前記治療計画の前記送達中に変化する速度で動かすことができ、前記ガントリーは、前記治療計画の送達中に変化する速度で動かすことができ、前記ジョーの幅の動的調節と、前記可動式支持台の前記動きの速度を変えることと、前記ガントリーの前記動きの速度を変えることとの任意の組合せは、前記治療計画の前記送達中に同時に行われ得る、請求項1に記載の方法。
【請求項7】
前記支持台は、前記治療計画の前記送達中に一定の速度で動かされる、請求項1に記載の方法。
【請求項8】
放射線療法システムを使用して患者の治療区域に放射線療法治療計画を送達する方法であって、前記患者を支持するための可動式支持台と、前記支持台に対して動かすことができるガントリーとを含み、前記ガントリーは、放射線源と、或るジョー幅を有するジョーのセットと、前記治療計画の送達中に放射線を変調するためのマルチリーフコリメーターとを支持している、前記放射線療法システムを使用して、患者の治療区域に放射線療法治療計画を送達する方法において、
前記治療区域への前記治療計画の送達中、前記支持台を或る軸に沿って変化する速度で動かす段階と、
前記治療計画の前記送達中、前記ガントリーを前記支持台に対して変化する速度で動かす段階と、から成る方法。
【請求項9】
前記治療計画の前記送達中、前記ジョーの幅を動的に調節する段階を更に備えている、請求項8に記載の方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】

【図17】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公表番号】特表2011−528977(P2011−528977A)
【公表日】平成23年12月1日(2011.12.1)
【国際特許分類】
【出願番号】特願2011−521139(P2011−521139)
【出願日】平成21年5月12日(2009.5.12)
【国際出願番号】PCT/US2009/043611
【国際公開番号】WO2010/014288
【国際公開日】平成22年2月4日(2010.2.4)
【出願人】(506024320)トモセラピー・インコーポレーテッド (27)
【Fターム(参考)】
【公表日】平成23年12月1日(2011.12.1)
【国際特許分類】
【出願日】平成21年5月12日(2009.5.12)
【国際出願番号】PCT/US2009/043611
【国際公開番号】WO2010/014288
【国際公開日】平成22年2月4日(2010.2.4)
【出願人】(506024320)トモセラピー・インコーポレーテッド (27)
【Fターム(参考)】
[ Back to top ]