
ステアリングホイール用生体検出センサ

【課題】簡単な構成で生体信号の検出をより確実に行うことができるステアリングホイール用生体検出センサを得る。
【解決手段】運転者が片手で同時に接触可能な一対の電極8,10をステアリングホイール1のリング状のグリップ部2の表面に設ける。一対の電極8,10をグリップ部2と直交する断面外周に沿って周方向に、かつ、リング状のグリップ部2の円周方向に沿って交互に配置する。一対の電極8,10はそれぞれ櫛形で、それぞれの電極が交互に配置されるように噛み合わせて配置した。また、一対の電極8,10は、それぞれ導電性の布で形成すると共に、一対の電極8,10を一枚のシート状に形成し、グリップ部2に巻き付けて両端をグリップ部2の内側に配置した。
【解決手段】運転者が片手で同時に接触可能な一対の電極8,10をステアリングホイール1のリング状のグリップ部2の表面に設ける。一対の電極8,10をグリップ部2と直交する断面外周に沿って周方向に、かつ、リング状のグリップ部2の円周方向に沿って交互に配置する。一対の電極8,10はそれぞれ櫛形で、それぞれの電極が交互に配置されるように噛み合わせて配置した。また、一対の電極8,10は、それぞれ導電性の布で形成すると共に、一対の電極8,10を一枚のシート状に形成し、グリップ部2に巻き付けて両端をグリップ部2の内側に配置した。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ステアリングホイールに設けられ、運転者の生体信号を検出するステアリングホイール用生体検出センサに関する。
【背景技術】
【0002】
従来より、特許文献1にあるように、ステアリングホイールを操作する運転者の手や指が電極に接触するように、ステアリングホイールの表面に電極を配置し、運転者の生体信号を電極を介して取得して、運転者の健康状態等を提供するものが提案されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−237378号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、こうした従来のものでは、一対の電極がステアリングホイールの表面に、リング状のステアリングホイールの円周方向に平行に並べて配置されているので、運転者がステアリングホイールを握るのではなく、手の平をステアリングホイールの表面に押し当てた状態でステアリングホイールを操作した場合、運転者の手の平が一対の電極の一方にしか接触せず、生体信号を取得できない場合があるという問題があった。また、電極をステアリングホイール内に埋め込んで配置しているので、加工が容易でないという問題があった。
【0005】
本発明の課題は、簡単な構成で生体信号の検出をより確実に行うことができるステアリングホイール用生体検出センサを提供することにある。
【課題を解決するための手段】
【0006】
かかる課題を達成すべく、本発明は課題を解決するため次の手段を取った。即ち、
運転者が片手で同時に接触可能な一対の電極をステアリングホイールのリング状のグリップ部の表面に設けたステアリングホイール用生体検出センサにおいて、
前記一対の電極を前記グリップ部と直交する断面外周に沿って周方向に、かつ、リング状のグリップ部の円周方向に沿って交互に配置したことを特徴とするステアリングホイール用生体検出センサがそれである。
【0007】
一対の電極はそれぞれ櫛形で、それぞれの電極が交互に配置されるように噛み合わせて配置した構成としてもよい。その際、前記一対の電極は、それぞれ導電性の布で形成すると共に、前記一対の電極を一枚のシート状に形成し、前記グリップ部に巻き付けて両端を前記グリップ部の内側に配置した構成としてもよい。
【0008】
また、前記一対の電極は、それぞれ導電性の布で形成すると共に、前記一対の電極をテープ状に形成し、前記グリップ部に螺旋状に巻き付けた構成としてもよい。更に、前記一対の電極は、前記グリップ部を握る運転者の片手の指の方向に交差して、斜めに配置した構成としてもよい。
【発明の効果】
【0009】
本発明のステアリングホイール用生体検出センサは、運転者の指と一対の電極とが交差して、運転者の指が一対の電極の両方に跨って接触すると共に、手の平をステアリングホイールに接触させても手の平が一対の電極の両方に跨って接触するので、確実に一対の電極の電位差を検出して、生体信号として検出でき、しかも、グリップ部の表面に巻き付ける構成を取ることができるので、簡単に構成できるという効果を奏する。
【0010】
一対の電極を櫛形に形成することにより、容易に交互に電極を配置できると共に、シート状に形成できるので、構成も簡単になる。また、一対の電極をテープ状に形成することにより、グリップ部への巻き付けが容易になる。更に、指の方向と交叉するように電極を斜めに配置することにより、一対の電極への接触が確実になる。
【図面の簡単な説明】
【0011】
【図1】本発明の第1実施形態としてのステアリングホイール用生体検出センサを適用したステアリングホイールの正面図である。
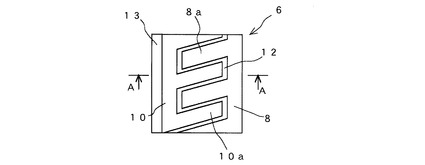
【図2】本第1実施形態のステアリングホイール用生体検出センサの拡大展開図である。
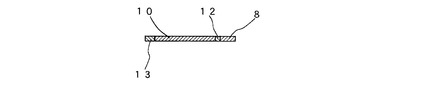
【図3】図2のAA断面矢視図である。
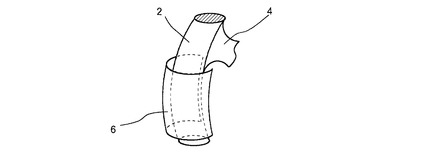
【図4】本第1実施形態のステアリングホイール用生体検出センサのグリップ部への巻き付けの説明図である。
【図5】本第1実施形態のステアリングホイール用生体検出センサを右側に適用したステアリングホイールの正面図である。
【図6】本第1実施形態のステアリングホイール用生体検出センサのステアリングホイールの左側と右側とへの配置の説明図である。
【図7】本発明の第2実施形態としてのステアリングホイール用生体検出センサを適用したステアリングホイールの正面図である。
【図8】本第2実施形態のステアリングホイール用生体検出センサの拡大展開図である。
【図9】図8のBB断面矢視図である。
【図10】本第2実施形態のステアリングホイール用生体検出センサを巻き付けた際の断面を示す説明図である。
【図11】本第2実施形態の別のステアリングホイール用生体検出センサの拡大展開図である。
【図12】図11のCC断面矢視図である。
【発明を実施するための形態】
【0012】
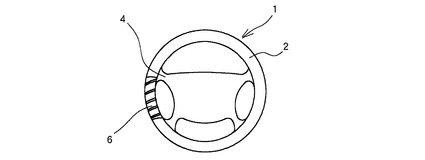
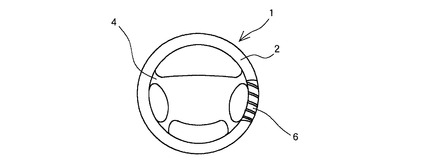
以下本発明を実施するための形態を図面に基づいて詳細に説明する。図1は本発明の第1実施形態としてのステアリングホイール用生体検出センサを適用したステアリングホイールの正面図である。
【0013】
図1に示すように、1はステアリングホイールで、ステアリングホイール1はリング状のグリップ部2を備えると共に、グリップ部2の内周から中央に向かって延びたグリップ部2を支持するスポーク部4を備えている。グリップ部2の表面にはステアリングホイール用生体検出センサ6(以下、生体検出センサ6という。以下同様。)が設けられている。
【0014】
本第1実施形態では、図2、図3に示すように、生体検出センサ6は長方形の一枚のシート状に形成されている。生体検出センサ6は一対の電極8,10を備え、一対の電極8,10は導電性の布により形成されると共に、一対の電極8,10の間には絶縁性の布からなる絶縁体12が設けられている。また、長方形状の生体検出センサ6の長手方向の一方の縁に沿って電極10の端にも絶縁性の布からなる絶縁体13が設けられている。
【0015】
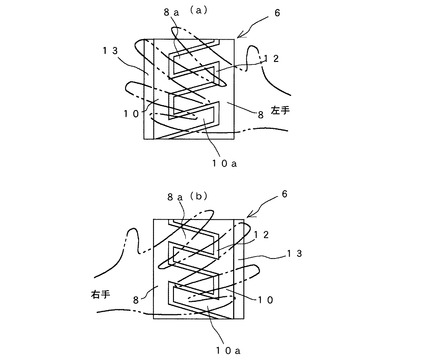
一対の電極8,10はそれぞれ櫛形に形成されており、一対の電極8,10のうち、一方の電極8は、図2に示すように、櫛歯部8aが右上から左下方向に斜めに延びて配置されている。これに対し、他方の電極10は、櫛歯部10aが左下から右上方向に斜めに延びて配置されており、一方の電極8の櫛歯部8aの間に他方の電極10の櫛歯部10aを噛み合わせて配置して、両櫛歯部8a,10aが平行に、かつ、両櫛歯部8a,10aが長方形の長手方向に沿って互い違いに平行になるように配置されている。
【0016】
両櫛歯部8a,10aの間に絶縁体12が配置されて、一対の電極8,10の絶縁が図られている。また、一対の電極8,10と絶縁体12とが合わせ目を縫製または接着により一体的に結合されている。両櫛歯部8a,10aと絶縁体12との合計の幅は、運転者の片手の指、主に、人差し指、中指、薬指の長さよりも短く形成されて、運転者が片手で両櫛歯部8a,10aと絶縁体12とに同時に接触可能な幅に形成されている。
【0017】
図4に示すように、前述したように形成されたシート状の生体検出センサ6がグリップ部2に巻き付けられる。巻き付ける際には、長方形の長手方向がリング状のグリップ部2の円周方向に合わせられ、シート状の生体検出センサ6の両端をグリップ部2の内側に配置して、生体検出センサ6の両端を縫い合わせグリップ部2に固定している。生体検出センサ6の両端は絶縁体13と電極8からなり、縫い合わせても、一方の電極8と他方の電極10とは短絡しない。
【0018】
生体検出センサ6をグリップ部2に取り付けた際には、図1に示すように、一対の電極8,10がグリップ部2と直交する断面外周に沿って周方向に、かつ、リング状のグリップ部2の円周方向に沿って交互に配置され、一対の電極8,10が外周周方向に対して斜めに配置される。
【0019】
また、運転者の左側のグリップ部2に一対の電極8,10を配置した場合には、一対の電極8,10は両櫛歯部8a,10aがグリップ部2の径方向内側から径方向外側に斜めに、かつ、外側に向かって下側に斜めに、配置される。これにより、図6(a)に示すように、グリップ部2を握る運転者の片手、例えば、左手の指の方向に交差して、一対の電極8,10の両櫛歯部8a,10aが斜めに配置される。
【0020】
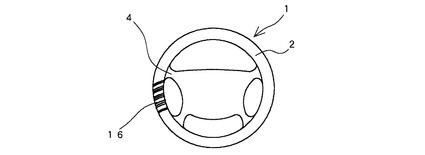
図2に示すシート状の生体検出センサ6を表裏を逆に裏返して、図5に示すように、運転者の右側のグリップ部2に巻き付けることもできる。生体検出センサ6は、裏返しても、一対の電極8,10は両面共に導電性を有する。
【0021】
裏返すことにより、両櫛歯部8a,10aの傾斜方向が逆方向になり、図6(b)に示すように、グリップ部2を握る運転者の右手の指の方向に交差して、一対の電極8,10の両櫛歯部8a,10aが斜めに配置される。裏返すことにより、同じ生体検出センサ6を運転者の左右両側に用いることができる。
【0022】
次に、前述した本第1実施形態の生体検出センサ6の作動について説明する。運転者が片手、例えば、左手でグリップ部2の表面の生体検出センサ6に接触すると、図6(a)に示すように、運転者の左手の指と、一対の電極8,10の両櫛歯部8a,10aとが交差して、運転者の指が一対の電極8,10の両方に跨って接触する。また、運転者の片手の手の平をステアリングホイール1に接触させても手の平が一対の電極8,10の両方に跨って接触する。
【0023】
従って、一対の電極8,10の電位差を検出して、生体信号として取り出す際に、一対の電極8,10の両方に運転者の指や手の平が接触しているので、確実に生体信号を検出できる。検出した生体信号に基づいて、運転者の健康状態等やステアリングホイール1への接触等を判定できる。しかも、グリップ部2の表面に巻き付ける構成を取ることができるので、グリップ部2に溝等を加工することなく簡単に構成できる。
【0024】
次に、前述した第1実施形態と異なる第2実施形態について、図7〜図9によって説明する。尚、前述した第1実施形態と同じ部材については同一番号を付して詳細な説明を省略する。
【0025】
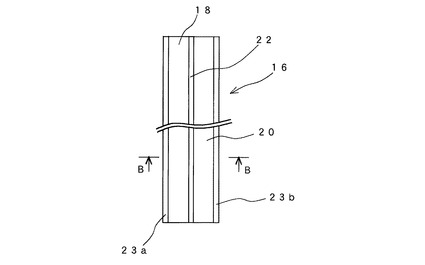
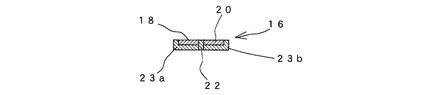
本第2実施形態では、図7に示すように、ステアリングホイール1のグリップ部2にテープ状の生体検出センサ16が設けられている。この生体検出センサ16は、図8、図9に示すように、テープ状の一対の電極18,20が間隔を空けて配置され、その間に絶縁体22が挟まれている。また、一対の電極18,20はそれぞれ断面L字状の絶縁体23a,23bに積層されると共に、一対の電極18,20の長手方向の外側の縁に沿って絶縁体23a,23bにより絶縁されている。
【0026】
一対の電極18,20はテープ状の導電性布で形成され、また、一対の電極18,20は絶縁体22,23a,23bによりそれぞれ左右側面と底面とが囲まれている。このテープ状の生体検出センサ16を運転者の左側のグリップ部2に斜めに巻き付ける。一対の電極18,20と絶縁体22,23a,23bとの合計の幅は、運転者の片手の指、主に、人差し指、中指、薬指の長さよりも短く形成されて、運転者が片手で一対の電極18,20に同時に接触可能な幅に形成されている。
【0027】
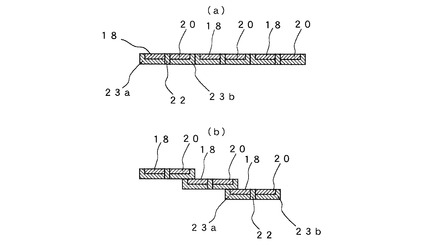
生体検出センサ16をグリップ部2に巻き付ける際には、図7に示すように、一対の電極18,20がグリップ部2と直交する断面外周に沿って周方向に、また、一対の電極18,20を外周周方向に対して斜めになるように螺旋状に巻き付けられる。絶縁体22,23a,23bを有するため、螺旋状に巻き付けても、一対の電極18,20が短絡することはない。巻き付ける際に、図10(a)に示すように、生体検出センサ16を重ならないように、密着させて巻き付けてもよい。また、図10(b)に示すように、生体検出センサ16の一部を重ね合わせた状態で巻き付けてもよい。その場合でも、絶縁体22,23a,23bにより、一対の電極18,20が短絡することはない。
【0028】
運転者の左側のグリップ部2に一対の電極18,20を配置した場合には、一対の電極18,20がグリップ部2の径方向内側から径方向外側に斜めに、かつ、外側に向かって下側に斜めに、配置される。これにより、グリップ部2を握る運転者の片手、例えば、左手の指の方向に交差して、一対の電極18,20が斜めに配置される。
【0029】
テープ状の生体検出センサ16を運転者の右側のグリップ部2に螺旋状に巻き付けてもよい。その際、生体検出センサ16は、図7の場合と巻き付けの方向が逆方向に斜めになるように、巻き付けることにより、グリップ部2を握る運転者の右手の指の方向に交差して、一対の電極18,20が斜めに配置される。
【0030】
本第2実施形態の場合でも、運転者が片手、例えば、左手でグリップ部2の表面の生体検出センサ16に接触すると、運転者の左手の指と、一対の電極18,20とが交差して、運転者の指が一対の電極18,20の両方に跨って接触する。また、運転者の片手の手の平をステアリングホイール1に接触させても手の平が一対の電極18,20の両方に跨って接触する。
【0031】
従って、一対の電極18,20の電位差を検出して、生体信号として取り出す際に、一対の電極18,20の両方に運転者の指や手の平が接触しているので、確実に生体信号を検出できる。検出した生体信号に基づいて、運転者の健康状態等やステアリングホイール1への接触等を判定できる。しかも、グリップ部2の表面に巻き付ける構成を取ることができるので、グリップ部2に溝等を加工することなく簡単に構成できる。
【0032】
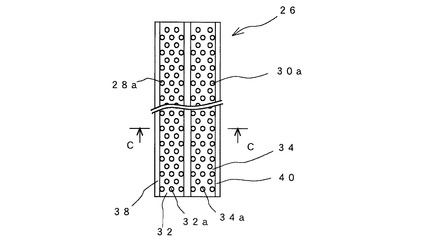
また、絶縁体22を間にして一対の電極18,20を配置した場合に限らず、図11、図12に示すように、テープ状の生体検出センサ26は一対の絶縁性の表皮32,34を備え、表皮32,34にはそれぞれ多数の小孔32a,34aが穿設され、表皮32,34の裏面に一対の電極28,30が設けられていてもよい。一対の電極28,30には表皮32,34の小孔32a,34aに挿入可能な多数の突起28a,30aを形成し、突起28a,30aを小孔32a,34aに挿入して、突起28a,30aを表皮32,34の表面に露出させる。尚、一対の電極28,30の間には絶縁体36が挟まれており、一対の電極28,30の裏面側はそれぞれ断面L字状の絶縁体38,40が設けられると共に、一対の電極28,30の長手方向の外側の縁に沿って絶縁体38,40により絶縁されている。
【0033】
この生体検出センサ26をグリップ部2の表面に、前述した生体検出センサ16と同様に螺旋状に巻き付けることにより、同様に実施可能である。尚、表皮32,34には皮革や絶縁性布等を用い、一対の電極28,30には導電性布や導電性不織布等を用いればよい。
【0034】
以上本発明はこの様な実施形態に何等限定されるものではなく、本発明の要旨を逸脱しない範囲において種々なる態様で実施し得る。
【符号の説明】
【0035】
1…ステアリングホイール 2…グリップ部
4…スポーク部 6,16,26…生体検出センサ
8,10,18,20,28,30…電極 8a,10a…櫛歯部
12,13,22,23a,23b,36,38,40…絶縁体
28a,30a…突起 32a,34a…小孔
32,34…表皮
【技術分野】
【0001】
本発明は、ステアリングホイールに設けられ、運転者の生体信号を検出するステアリングホイール用生体検出センサに関する。
【背景技術】
【0002】
従来より、特許文献1にあるように、ステアリングホイールを操作する運転者の手や指が電極に接触するように、ステアリングホイールの表面に電極を配置し、運転者の生体信号を電極を介して取得して、運転者の健康状態等を提供するものが提案されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−237378号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、こうした従来のものでは、一対の電極がステアリングホイールの表面に、リング状のステアリングホイールの円周方向に平行に並べて配置されているので、運転者がステアリングホイールを握るのではなく、手の平をステアリングホイールの表面に押し当てた状態でステアリングホイールを操作した場合、運転者の手の平が一対の電極の一方にしか接触せず、生体信号を取得できない場合があるという問題があった。また、電極をステアリングホイール内に埋め込んで配置しているので、加工が容易でないという問題があった。
【0005】
本発明の課題は、簡単な構成で生体信号の検出をより確実に行うことができるステアリングホイール用生体検出センサを提供することにある。
【課題を解決するための手段】
【0006】
かかる課題を達成すべく、本発明は課題を解決するため次の手段を取った。即ち、
運転者が片手で同時に接触可能な一対の電極をステアリングホイールのリング状のグリップ部の表面に設けたステアリングホイール用生体検出センサにおいて、
前記一対の電極を前記グリップ部と直交する断面外周に沿って周方向に、かつ、リング状のグリップ部の円周方向に沿って交互に配置したことを特徴とするステアリングホイール用生体検出センサがそれである。
【0007】
一対の電極はそれぞれ櫛形で、それぞれの電極が交互に配置されるように噛み合わせて配置した構成としてもよい。その際、前記一対の電極は、それぞれ導電性の布で形成すると共に、前記一対の電極を一枚のシート状に形成し、前記グリップ部に巻き付けて両端を前記グリップ部の内側に配置した構成としてもよい。
【0008】
また、前記一対の電極は、それぞれ導電性の布で形成すると共に、前記一対の電極をテープ状に形成し、前記グリップ部に螺旋状に巻き付けた構成としてもよい。更に、前記一対の電極は、前記グリップ部を握る運転者の片手の指の方向に交差して、斜めに配置した構成としてもよい。
【発明の効果】
【0009】
本発明のステアリングホイール用生体検出センサは、運転者の指と一対の電極とが交差して、運転者の指が一対の電極の両方に跨って接触すると共に、手の平をステアリングホイールに接触させても手の平が一対の電極の両方に跨って接触するので、確実に一対の電極の電位差を検出して、生体信号として検出でき、しかも、グリップ部の表面に巻き付ける構成を取ることができるので、簡単に構成できるという効果を奏する。
【0010】
一対の電極を櫛形に形成することにより、容易に交互に電極を配置できると共に、シート状に形成できるので、構成も簡単になる。また、一対の電極をテープ状に形成することにより、グリップ部への巻き付けが容易になる。更に、指の方向と交叉するように電極を斜めに配置することにより、一対の電極への接触が確実になる。
【図面の簡単な説明】
【0011】
【図1】本発明の第1実施形態としてのステアリングホイール用生体検出センサを適用したステアリングホイールの正面図である。
【図2】本第1実施形態のステアリングホイール用生体検出センサの拡大展開図である。
【図3】図2のAA断面矢視図である。
【図4】本第1実施形態のステアリングホイール用生体検出センサのグリップ部への巻き付けの説明図である。
【図5】本第1実施形態のステアリングホイール用生体検出センサを右側に適用したステアリングホイールの正面図である。
【図6】本第1実施形態のステアリングホイール用生体検出センサのステアリングホイールの左側と右側とへの配置の説明図である。
【図7】本発明の第2実施形態としてのステアリングホイール用生体検出センサを適用したステアリングホイールの正面図である。
【図8】本第2実施形態のステアリングホイール用生体検出センサの拡大展開図である。
【図9】図8のBB断面矢視図である。
【図10】本第2実施形態のステアリングホイール用生体検出センサを巻き付けた際の断面を示す説明図である。
【図11】本第2実施形態の別のステアリングホイール用生体検出センサの拡大展開図である。
【図12】図11のCC断面矢視図である。
【発明を実施するための形態】
【0012】
以下本発明を実施するための形態を図面に基づいて詳細に説明する。図1は本発明の第1実施形態としてのステアリングホイール用生体検出センサを適用したステアリングホイールの正面図である。
【0013】
図1に示すように、1はステアリングホイールで、ステアリングホイール1はリング状のグリップ部2を備えると共に、グリップ部2の内周から中央に向かって延びたグリップ部2を支持するスポーク部4を備えている。グリップ部2の表面にはステアリングホイール用生体検出センサ6(以下、生体検出センサ6という。以下同様。)が設けられている。
【0014】
本第1実施形態では、図2、図3に示すように、生体検出センサ6は長方形の一枚のシート状に形成されている。生体検出センサ6は一対の電極8,10を備え、一対の電極8,10は導電性の布により形成されると共に、一対の電極8,10の間には絶縁性の布からなる絶縁体12が設けられている。また、長方形状の生体検出センサ6の長手方向の一方の縁に沿って電極10の端にも絶縁性の布からなる絶縁体13が設けられている。
【0015】
一対の電極8,10はそれぞれ櫛形に形成されており、一対の電極8,10のうち、一方の電極8は、図2に示すように、櫛歯部8aが右上から左下方向に斜めに延びて配置されている。これに対し、他方の電極10は、櫛歯部10aが左下から右上方向に斜めに延びて配置されており、一方の電極8の櫛歯部8aの間に他方の電極10の櫛歯部10aを噛み合わせて配置して、両櫛歯部8a,10aが平行に、かつ、両櫛歯部8a,10aが長方形の長手方向に沿って互い違いに平行になるように配置されている。
【0016】
両櫛歯部8a,10aの間に絶縁体12が配置されて、一対の電極8,10の絶縁が図られている。また、一対の電極8,10と絶縁体12とが合わせ目を縫製または接着により一体的に結合されている。両櫛歯部8a,10aと絶縁体12との合計の幅は、運転者の片手の指、主に、人差し指、中指、薬指の長さよりも短く形成されて、運転者が片手で両櫛歯部8a,10aと絶縁体12とに同時に接触可能な幅に形成されている。
【0017】
図4に示すように、前述したように形成されたシート状の生体検出センサ6がグリップ部2に巻き付けられる。巻き付ける際には、長方形の長手方向がリング状のグリップ部2の円周方向に合わせられ、シート状の生体検出センサ6の両端をグリップ部2の内側に配置して、生体検出センサ6の両端を縫い合わせグリップ部2に固定している。生体検出センサ6の両端は絶縁体13と電極8からなり、縫い合わせても、一方の電極8と他方の電極10とは短絡しない。
【0018】
生体検出センサ6をグリップ部2に取り付けた際には、図1に示すように、一対の電極8,10がグリップ部2と直交する断面外周に沿って周方向に、かつ、リング状のグリップ部2の円周方向に沿って交互に配置され、一対の電極8,10が外周周方向に対して斜めに配置される。
【0019】
また、運転者の左側のグリップ部2に一対の電極8,10を配置した場合には、一対の電極8,10は両櫛歯部8a,10aがグリップ部2の径方向内側から径方向外側に斜めに、かつ、外側に向かって下側に斜めに、配置される。これにより、図6(a)に示すように、グリップ部2を握る運転者の片手、例えば、左手の指の方向に交差して、一対の電極8,10の両櫛歯部8a,10aが斜めに配置される。
【0020】
図2に示すシート状の生体検出センサ6を表裏を逆に裏返して、図5に示すように、運転者の右側のグリップ部2に巻き付けることもできる。生体検出センサ6は、裏返しても、一対の電極8,10は両面共に導電性を有する。
【0021】
裏返すことにより、両櫛歯部8a,10aの傾斜方向が逆方向になり、図6(b)に示すように、グリップ部2を握る運転者の右手の指の方向に交差して、一対の電極8,10の両櫛歯部8a,10aが斜めに配置される。裏返すことにより、同じ生体検出センサ6を運転者の左右両側に用いることができる。
【0022】
次に、前述した本第1実施形態の生体検出センサ6の作動について説明する。運転者が片手、例えば、左手でグリップ部2の表面の生体検出センサ6に接触すると、図6(a)に示すように、運転者の左手の指と、一対の電極8,10の両櫛歯部8a,10aとが交差して、運転者の指が一対の電極8,10の両方に跨って接触する。また、運転者の片手の手の平をステアリングホイール1に接触させても手の平が一対の電極8,10の両方に跨って接触する。
【0023】
従って、一対の電極8,10の電位差を検出して、生体信号として取り出す際に、一対の電極8,10の両方に運転者の指や手の平が接触しているので、確実に生体信号を検出できる。検出した生体信号に基づいて、運転者の健康状態等やステアリングホイール1への接触等を判定できる。しかも、グリップ部2の表面に巻き付ける構成を取ることができるので、グリップ部2に溝等を加工することなく簡単に構成できる。
【0024】
次に、前述した第1実施形態と異なる第2実施形態について、図7〜図9によって説明する。尚、前述した第1実施形態と同じ部材については同一番号を付して詳細な説明を省略する。
【0025】
本第2実施形態では、図7に示すように、ステアリングホイール1のグリップ部2にテープ状の生体検出センサ16が設けられている。この生体検出センサ16は、図8、図9に示すように、テープ状の一対の電極18,20が間隔を空けて配置され、その間に絶縁体22が挟まれている。また、一対の電極18,20はそれぞれ断面L字状の絶縁体23a,23bに積層されると共に、一対の電極18,20の長手方向の外側の縁に沿って絶縁体23a,23bにより絶縁されている。
【0026】
一対の電極18,20はテープ状の導電性布で形成され、また、一対の電極18,20は絶縁体22,23a,23bによりそれぞれ左右側面と底面とが囲まれている。このテープ状の生体検出センサ16を運転者の左側のグリップ部2に斜めに巻き付ける。一対の電極18,20と絶縁体22,23a,23bとの合計の幅は、運転者の片手の指、主に、人差し指、中指、薬指の長さよりも短く形成されて、運転者が片手で一対の電極18,20に同時に接触可能な幅に形成されている。
【0027】
生体検出センサ16をグリップ部2に巻き付ける際には、図7に示すように、一対の電極18,20がグリップ部2と直交する断面外周に沿って周方向に、また、一対の電極18,20を外周周方向に対して斜めになるように螺旋状に巻き付けられる。絶縁体22,23a,23bを有するため、螺旋状に巻き付けても、一対の電極18,20が短絡することはない。巻き付ける際に、図10(a)に示すように、生体検出センサ16を重ならないように、密着させて巻き付けてもよい。また、図10(b)に示すように、生体検出センサ16の一部を重ね合わせた状態で巻き付けてもよい。その場合でも、絶縁体22,23a,23bにより、一対の電極18,20が短絡することはない。
【0028】
運転者の左側のグリップ部2に一対の電極18,20を配置した場合には、一対の電極18,20がグリップ部2の径方向内側から径方向外側に斜めに、かつ、外側に向かって下側に斜めに、配置される。これにより、グリップ部2を握る運転者の片手、例えば、左手の指の方向に交差して、一対の電極18,20が斜めに配置される。
【0029】
テープ状の生体検出センサ16を運転者の右側のグリップ部2に螺旋状に巻き付けてもよい。その際、生体検出センサ16は、図7の場合と巻き付けの方向が逆方向に斜めになるように、巻き付けることにより、グリップ部2を握る運転者の右手の指の方向に交差して、一対の電極18,20が斜めに配置される。
【0030】
本第2実施形態の場合でも、運転者が片手、例えば、左手でグリップ部2の表面の生体検出センサ16に接触すると、運転者の左手の指と、一対の電極18,20とが交差して、運転者の指が一対の電極18,20の両方に跨って接触する。また、運転者の片手の手の平をステアリングホイール1に接触させても手の平が一対の電極18,20の両方に跨って接触する。
【0031】
従って、一対の電極18,20の電位差を検出して、生体信号として取り出す際に、一対の電極18,20の両方に運転者の指や手の平が接触しているので、確実に生体信号を検出できる。検出した生体信号に基づいて、運転者の健康状態等やステアリングホイール1への接触等を判定できる。しかも、グリップ部2の表面に巻き付ける構成を取ることができるので、グリップ部2に溝等を加工することなく簡単に構成できる。
【0032】
また、絶縁体22を間にして一対の電極18,20を配置した場合に限らず、図11、図12に示すように、テープ状の生体検出センサ26は一対の絶縁性の表皮32,34を備え、表皮32,34にはそれぞれ多数の小孔32a,34aが穿設され、表皮32,34の裏面に一対の電極28,30が設けられていてもよい。一対の電極28,30には表皮32,34の小孔32a,34aに挿入可能な多数の突起28a,30aを形成し、突起28a,30aを小孔32a,34aに挿入して、突起28a,30aを表皮32,34の表面に露出させる。尚、一対の電極28,30の間には絶縁体36が挟まれており、一対の電極28,30の裏面側はそれぞれ断面L字状の絶縁体38,40が設けられると共に、一対の電極28,30の長手方向の外側の縁に沿って絶縁体38,40により絶縁されている。
【0033】
この生体検出センサ26をグリップ部2の表面に、前述した生体検出センサ16と同様に螺旋状に巻き付けることにより、同様に実施可能である。尚、表皮32,34には皮革や絶縁性布等を用い、一対の電極28,30には導電性布や導電性不織布等を用いればよい。
【0034】
以上本発明はこの様な実施形態に何等限定されるものではなく、本発明の要旨を逸脱しない範囲において種々なる態様で実施し得る。
【符号の説明】
【0035】
1…ステアリングホイール 2…グリップ部
4…スポーク部 6,16,26…生体検出センサ
8,10,18,20,28,30…電極 8a,10a…櫛歯部
12,13,22,23a,23b,36,38,40…絶縁体
28a,30a…突起 32a,34a…小孔
32,34…表皮
【特許請求の範囲】
【請求項1】
運転者が片手で同時に接触可能な一対の電極をステアリングホイールのリング状のグリップ部の表面に設けたステアリングホイール用生体検出センサにおいて、
前記一対の電極を前記グリップ部と直交する断面外周に沿って周方向に、かつ、リング状のグリップ部の円周方向に沿って交互に配置したことを特徴とするステアリングホイール用生体検出センサ。
【請求項2】
一対の電極はそれぞれ櫛形で、それぞれの電極が交互に配置されるように噛み合わせて配置したことを特徴とする請求項1に記載のステアリングホイール用生体検出センサ。
【請求項3】
前記一対の電極は、それぞれ導電性の布で形成すると共に、前記一対の電極を一枚のシート状に形成し、前記グリップ部に巻き付けて両端を前記グリップ部の内側に配置したことを特徴とする請求項2に記載のステアリングホイール用生体検出センサ。
【請求項4】
前記一対の電極は、それぞれ導電性の布で形成すると共に、前記一対の電極をテープ状に形成し、前記グリップ部に螺旋状に巻き付けたことを特徴とする請求項1に記載のステアリングホイール用生体検出センサ。
【請求項5】
前記一対の電極は、前記グリップ部を握る運転者の片手の指の方向に交差して、斜めに配置したことを特徴とする請求項1ないし請求項4のいずれかに記載のステアリングホイール用生体検出センサ。
【請求項1】
運転者が片手で同時に接触可能な一対の電極をステアリングホイールのリング状のグリップ部の表面に設けたステアリングホイール用生体検出センサにおいて、
前記一対の電極を前記グリップ部と直交する断面外周に沿って周方向に、かつ、リング状のグリップ部の円周方向に沿って交互に配置したことを特徴とするステアリングホイール用生体検出センサ。
【請求項2】
一対の電極はそれぞれ櫛形で、それぞれの電極が交互に配置されるように噛み合わせて配置したことを特徴とする請求項1に記載のステアリングホイール用生体検出センサ。
【請求項3】
前記一対の電極は、それぞれ導電性の布で形成すると共に、前記一対の電極を一枚のシート状に形成し、前記グリップ部に巻き付けて両端を前記グリップ部の内側に配置したことを特徴とする請求項2に記載のステアリングホイール用生体検出センサ。
【請求項4】
前記一対の電極は、それぞれ導電性の布で形成すると共に、前記一対の電極をテープ状に形成し、前記グリップ部に螺旋状に巻き付けたことを特徴とする請求項1に記載のステアリングホイール用生体検出センサ。
【請求項5】
前記一対の電極は、前記グリップ部を握る運転者の片手の指の方向に交差して、斜めに配置したことを特徴とする請求項1ないし請求項4のいずれかに記載のステアリングホイール用生体検出センサ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2013−90834(P2013−90834A)
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願番号】特願2011−235103(P2011−235103)
【出願日】平成23年10月26日(2011.10.26)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願日】平成23年10月26日(2011.10.26)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]