
ステアリングロック駆動回路、ステアリングロック装置
【課題】マイコンの不具合により意図しないロック又はアンロックが起こることなく、シフトポジションに関係なくロックの解除が可能なステアリングロック駆動回路を提供すること。
【解決手段】車両状況の検出結果に応じてステアリングのロック命令又はアンロック命令を出力するマイコン30と、ステアリングをロックするロック部材がアンロック位置にあることを検出するアンロックセンサ23から取得した、アンロック信号を保持するラッチ回路311と、ラッチ回路の論理否定の信号と、シフトポジションがパーキング位置であることを示すパーキング信号を入力とする論理和回路313と、前記ロック命令又は前記アンロック命令、前記論理和回路の出力、及び、車両から検出された情報が所定の条件を満たす場合に生成される条件一致信号を入力とする論理積回路314と、を有するステアリングロック駆動回路100を提供する。
【解決手段】車両状況の検出結果に応じてステアリングのロック命令又はアンロック命令を出力するマイコン30と、ステアリングをロックするロック部材がアンロック位置にあることを検出するアンロックセンサ23から取得した、アンロック信号を保持するラッチ回路311と、ラッチ回路の論理否定の信号と、シフトポジションがパーキング位置であることを示すパーキング信号を入力とする論理和回路313と、前記ロック命令又は前記アンロック命令、前記論理和回路の出力、及び、車両から検出された情報が所定の条件を満たす場合に生成される条件一致信号を入力とする論理積回路314と、を有するステアリングロック駆動回路100を提供する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ステアリングの回転を制限するステアリングロック駆動回路に関する。
【背景技術】
【0002】
車両には盗難防止用にステアリングシャフトの回転をロックするロック機構が搭載されている。例えば、メカニカルキーがキーシリンダから抜かれた状態で乗員等がステアリングを回すと、ステアリングの回転が制限されるようになる。また、車両がキーを認証して、エンジン始動などを許可する電子キーシステムの場合、予め定められた条件が成立するとロック機構がステアリングシャフトの回転をロックする(以下、単に「ステアリングをロックする」という)。後者を電子式ステアリングロックシステムという。
【0003】
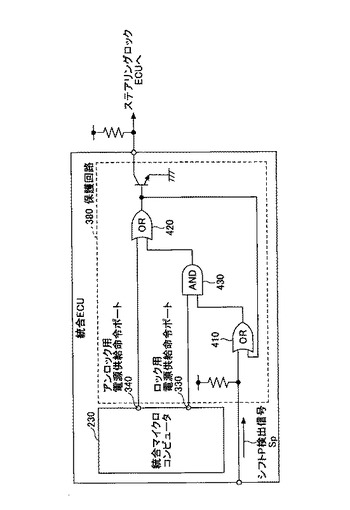
図1は、従来の電子式ステアリングロックシステムの一例を説明する図である。統合マイクロコンピュータ230は、電子キーの認証が成立したという認証結果を取得すると、イグニッションがオフしていること等を条件に、ロック用電源供給命令ポート330からAND回路430にロック電源供給命令を出力する。このAND回430にはOR回路410を介してシフトポジションが“P”の時に“1”となる信号が供給されている。したがって、図1では、イグニッションがオフ、シフトポジションが“P”になるとステアリングがロックされる。走行中にこの成立条件が成立することはないとしてよいので、走行中に誤作動してステアリングがロックされることはない。
【0004】
また、図1の保護回路380は統合ECUがソフト的に実現するのでなく、ハード的な回路により実現されている。このため、統合ECU(統合マイクロコンピュータ230)の動作に不具合が生じても保護回路380は影響を受けず、ステアリングをロックするための条件の成立を正確に判定できる。
【0005】
また、アンロック時は、統合マイクロコンピュータ230がアンロック信号をOR回路420に出力することでステアリングのロックが解除されるので、シフトポジションが“P”以外でもステアリングロックを解除できる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2010−264836号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、図のような回路では、統合マイクロコンピュータ230が起動中や統合マイクロコンピュータ230に不具合が生じている場合、ステアリングロックが解除されるおそれがある。例えば、統合マイクロコンピュータ230がアンロック信号をOR回路420に出力するだけでアンロックされてしまう。
【0008】
このような解除を防ぐため、ロック信号と同様にシフトポジション信号をアンロックの条件とすることが考えられるが、そうするとシフトポジションが“P”でなければステアリングのロックを解除できなくなってしまう。
【0009】
エンジン始動時の乗員の動作を考慮すると、従来のメカニカルキーによるエンジン始動では、シフトポジションは“N”でもエンジン始動が可能であった。これに対し、電子キーシステムではシフトポジションが“P”でなければステアリングロックを解除できないことになる。すなわち、実質的にシフトポジションPでなければエンジン始動できない。このため、乗員によっては不便と感じるおそれがある。
【0010】
仮に、シフトポジションを“P”にして乗員がエンジン始動した場合でも、乗員がエンジンスイッチ(スタートボタン)を押下した後、短時間に(連続した動作で)シフトポジションをN(P以外)にすると、ステアリングロックの解除の途中にシフトポジションが“N”になるおそれがある。この場合、ステアリングシャフトをロックするロックバーの位置がアンロック位置まで到達していないので、乗員は再度、エンジン始動をやり直す必要に迫られるおそれがある。
【0011】
本発明は、上記課題に鑑み、マイコンの不具合により意図しないロック又はアンロックが起こることなく、シフトポジションに関係なくロックの解除が可能なステアリングロック駆動回路を提供することを目的とする。
【課題を解決するための手段】
【0012】
本発明は、車両状況の検出結果に応じてステアリングのロック命令又はアンロック命令を出力するマイコンと、ステアリングをロックするロック部材がアンロック位置にあることを検出するアンロックセンサから取得した、アンロック信号を保持するラッチ回路と、前記ラッチ回路の論理否定の信号と、シフトポジションがパーキング位置であることを示すパーキング信号を入力とする論理和回路と、前記ロック命令又は前記アンロック命令、前記論理和回路の出力、及び、車両から検出された情報が所定の条件を満たす場合に生成される条件一致信号を入力とする論理積回路と、を有するステアリングロック駆動回路を提供する。
【発明の効果】
【0013】
マイコンの不具合により意図しないロック又はアンロックが起こることなく、シフトポジションに関係なくロックの解除が可能なステアリングロック駆動回路を提供することができる。
【図面の簡単な説明】
【0014】
【図1】従来のステアリングロックの成立条件の一例を説明する図である。
【図2】本実施形態のステアリングロック装置の特徴部を説明する図の一例である。
【図3】ステアリングロック装置の概略構成図の一例である。
【図4】ステアリングロック装置のシステム構成を説明する図の一例である。
【図5】ハード回路の構成図の一例である。
【図6】S端子、R端子の入力とQ端子からの出力の関係を示す図の一例である。
【図7】ハード回路から得られるロック命令又はアンロック命令の駆動許可出力が出力される条件を説明するフローチャート図の一例である。
【発明を実施するための形態】
【0015】
以下、本発明を実施するための形態について図面を参照しながら説明する。
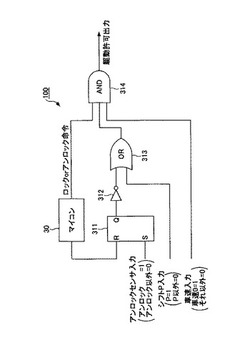
図2は、本実施形態のプッシュスタート制御ECU100の特徴部を説明する図の一例である。図示するように、プッシュスタート制御ECU100は、以下の3つの条件が成立する場合に、ステアリングをロック又はアンロックする。
(1)マイコンのロック命令又はアンロック命令
(2)アンロックセンサがアンロック位置以外を検出又はシフトポジションが“P”
(3)車速がゼロ
走行中を想定すると、ロックバーはアンロック位置にあるはずである。このため、アンロックセンサはアンロック位置=“1”を出力する。ラッチ回路311はセット又はリセットされた状態を保持するので、アンロック位置=“1”を保持する。ラッチ回路311の出力はNOT回路312で“0”に反転されるので、ラッチ回路311からOR回路313への入力は“0”である。OR回路313にはシフトポジションセンサの検出信号が入力されるが、走行中にシフトポジションがPになることは極めてまれである。したがって、走行中に、AND回路314が駆動許可出力を出力することはない。また、仮にマイコンが不具合を起こしても、走行中はシフトポジションと車速により誤ロックを防止できる。
【0016】
また、アンロックセンサが振動などによりロック位置を検出しても、ラッチ回路311は“1”の状態を保持している。このため、走行中にロックバーが移動してロック位置が検出されても、ラッチ回路311が“0”を出力するおそれはない。
【0017】
また、駐車中、アンロックセンサはロック位置を検出している。すなわち、ラッチ回路311は“0”を保持する。ラッチ回路311の出力はNOT回路312で“1”に反転されるので、ラッチ回路311からOR回路313への入力は“1”である。ここで、乗員(運転者を含む)がアンロック操作(エンジン始動操作)を行う際、シフトポジションを“P”にしなかったとする。このため、OR回路313にはシフトポジションセンサの検出信号として“0”が入力されるが、NOT回路312から“1”が入力されるため、OR回路313は“1”をAND回路314に出力する。このため、マイコン30がアンロック命令を出力し、車速がゼロであれば、シフトポジションの位置に関係なくステアリングのロックが解除される(エンジン始動される)。
【0018】
従って、本実施形態のプッシュスタート制御ECU100は、ラッチ回路311がアンロックセンサの検出結果を保持することで、マイコン30の不具合などによる走行中の誤ロックをより確実に防止し、かつ、シフトポジションが“P”以外でもアンロックを可能にすることができる。
【0019】
〔構成例〕
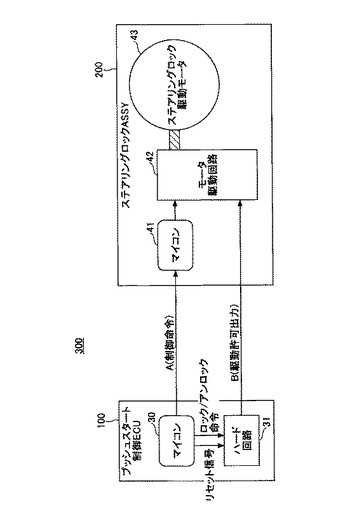
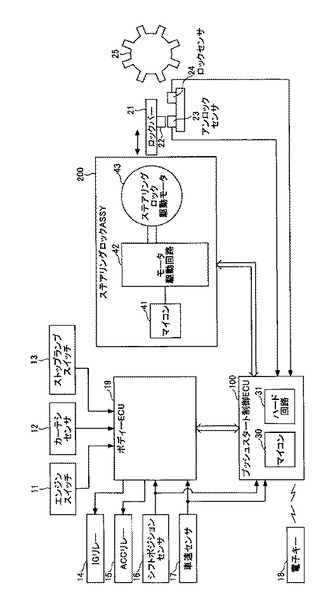
図3は、本実施形態のステアリングロック装置300の概略構成図の一例を示す。ステアリングロック装置300は、プッシュスタート制御ECU100及びステアリングロックASSY200を有する。両者のマイコン30と41は、例えばLIN(Local Interconnect Network)やCAN(Controller Area Network)の車載ネットワークを介して接続されている。また、プッシュスタート制御ECU100のハード回路31とステアリングロックASSY200のモータ駆動回路42は直接、接続されている。
【0020】
プッシュスタート制御ECU100は、マイコン30及びハード回路31を有する。マイコン30は、CPU、RAM、ROM、CANC(CAN Controller)、及び、入出力I/O等がバスを介して接続されたコンピュータである。マイコン30は、CPUがROMに記憶されたプログラムを実行することで、制御命令、リセット信号、及び、ロック命令/アンロック命令を出力するか否かを判定している。
【0021】
プッシュスタート制御ECU100のマイコン30は、配線Aを介して制御命令をステアリングロックASSY200のマイコン41に送信する。制御命令には、ロックのための正転命令、アンロックのための逆転命令、ロック又はアンロックを停止させる停止命令等がある。また、ステアリングロックASSY200のマイコン41は、配線Aを介してプッシュスタート制御ECU100のマイコン30に、ロック完了、アンロック完了、又は、停止完了などの動作情報を通知する。
【0022】
また、プッシュスタート制御ECU100は、配線Bを介して駆動許可出力をステアリングロックASSY200に出力する。プッシュスタート制御ECU100は、ステアリングをロックする時もステアリングのロックを解除する時も駆動許可出力をステアリングロックASSY200に出力する。ロックかアンロックかを制御するのは配線Aの制御命令である。
【0023】
ハード回路31は、駆動許可出力を出力する条件が成立したか否かをハード的に判定し、駆動許可出力を出力する回路である。マイコン30とハード回路31は、ロック命令又はアンロック命令の出力判定と、駆動許可出力の出力判定において重複した条件を判定してもよいし、全く異なる条件を判定してもよい。
【0024】
ステアリングロックASSY200は、マイコン41、モータ駆動回路42及ぶステアリングロック駆動モータ(以下、単に駆動モータという)43を有する。マイコン41は、CPU、RAM、ROM、CANC(CAN Controller)、及び、入出力I/O等がバスを介して接続されたコンピュータである。マイコン41は、マイコン30からの制御命令に基づき、モータ駆動回路42の回転、停止及び回転方向を制御する。
【0025】
マイコン41がマイコン30から正転命令を受信した場合、マイコン41は駆動モータ43の回転方向をロック側(正転側)に制御する。マイコン41がマイコン30から逆転命令を受信した場合、マイコン41は駆動モータ43の回転方向をアンロック側(逆転側)に制御する。モータ駆動回路42は、駆動許可出力を受け付けると駆動電流を生成し、駆動モータ43に供給する。なお、駆動モータ43は例えばDCモータである。
【0026】
図4は、ステアリングロック装置300のシステム構成を説明する図の一例である。まず、ボディECU19には、エンジンスイッチ11、カーテシセンサ12、ストップランプスイッチ13、シフトポジションセンサ16、IGリレー14、ACCリレー15、車速センサ17及びプッシュスタート制御ECU100が接続されている。
【0027】
エンジンスイッチ11は押しボタン式のモーメンタリスイッチであり、内部から初期位置方向に弾性体による付勢力が与えられている。すなわち、運転者が押している間だけオン信号を出力する。カーテシセンサ12はドアの開閉を検出するセンサであり、ドア毎に配置されている。ストップランプスイッチ13は、ブレーキペダルの踏み込み時にオンとなるスイッチである。
【0028】
ACCリレー15は、バッテリからアクセサリー機器と呼ばれる機器(オーディオ類、ナビ、室内灯等)に供給される電源をオン又はオフするリレーである。IGリレー14は、バッテリから走行時に必要な機器(メーター系、ワイパー、イグニッションコイル、インジェクタなど)に供給される電源をオン又はオフするリレーである。シフトポジションセンサ16は、シフトレバーの位置(シフトポジション)を検知し、検知されたシフトポジションに応じた電気信号を出力する。車速センサ17は、例えば、車輪の回転に連動してパルス信号を出力するセンサであり、各ECUは単位時間のパルス数から車速を求めることができる。
【0029】
プッシュスタート制御ECU100は、不図示の室内アンテナ及び室外アンテナと接続されており、電子キー18と通信する。ドアロック状態では、プッシュスタート制御ECU100は、室外アンテナを用いて車両の外に電子キー18の検知エリアを形成する。検知エリアは室外アンテナからリクエスト電波が届く範囲である。また、プッシュスタート制御ECU100は、運転席ドアの開閉、ブレーキペダルの踏み込み、エンジンスイッチ11のオンの際など、予め決まった状況で、室内アンテナを用いて車内に電子キー18の検知エリアを形成する。
【0030】
プッシュスタート制御ECU100は検知エリアの電子キー18にIDコードのリクエスト電波を送信する。運転者が携帯する電子キー18はIDコードが含まれるレスポンス電波を送信する。プッシュスタート制御ECU100はチューナでレスポンス電波を受信し、受信したIDコードが予め記憶するIDコードと一致するか否かにより電子キー18を認証する。
【0031】
ボディECU19は、電子キー18の認証結果などに基づき、エンジン始動及び停止を管理している。ステアリングのロックは例えばエンジン始動の一連の手順の中で行われ、ステアリングのロックの解除は例えばエンジン停止の一連の手順の中で行われる。ステアリングのロック及びステアリングのロックの解除の手順については後述する。
【0032】
駆動モータ43はロックバー21をステアリングシャフト25に対し接近する方向と離間する方向に駆動する。ロックバー21には、位置検出用に例えば永久磁石22が固定されている。ロックバー21と対向する場所(例えば、ステアリングロックASSY200の基板上)にはアンロックセンサ23とロックセンサ24が固定されている。アンロックセンサ23及びロックセンサ24は例えばホール素子を有し、永久磁石22の位置により変化する磁束密度を検出している。したがって、アンロックセンサ23はロックバー21がアンロック位置にあることを、ロックセンサ24はロックバー21がロック位置にあることを、それぞれ検出する。
【0033】
アンロックセンサ23とロックセンサ24はプッシュスタート制御ECU100に接続されており、プッシュスタート制御ECU100はロックバー21がアンロック状態又はロック状態となっていることを検出することができる。
【0034】
駆動許可出力により、ステアリングロックASSY200が駆動モータ43を正方向に回転させると、ロックバー21がステアリングシャフト25に接近する方向に移動する。ステアリングシャフト25は、軸の円周に複数の凹部を有し、ロックバー21が接近するとロックバー21の先端とこの凹部が係合する。係合した状態では、ロックバー21がステアリングシャフト25の回転を制限するロック状態となる。ステアリングロックASSY200は、ロックセンサ24の出力によりロックバー21がロック状態になったことを検出すると駆動モータ43を停止する。
【0035】
同様に、駆動許可出力により、ステアリングロックASSY200が駆動モータ43を逆方向に回転させると、ロックバー21がステアリングシャフト25と離間する方向に移動する。この移動により、ロックバー21の先端と凹部の係合が解消された、アンロック状態となる。ステアリングロックASSY200は、アンロックセンサ23の出力によりロックバー21がアンロック状態になったことを検出すると駆動モータ43を停止する。
【0036】
〔ステアリングロックの動作手順〕
ステアリングがロックされる状況の一例としては、乗員がエンジン停止後、降車した場合が挙げられる。
(A1)車両の停車後(車速はゼロ)、乗員はシフトポジションを例えば“P”にしてエンジンスイッチ11を押下する。
(A2)ボディECU19は、シフトポジション=Pをシフトポジションセンサ16から検出し、車速センサ17から車速がゼロであることを検出し、エンジンを停止可能な状況であると判定する。これにより、IGリレー14とACCリレー15をオフにする。これによりエンジンは停止する。
(A3)プッシュスタート制御ECU100はIGリレー14とACCリレー15のオフを検出する。なお、プッシュスタート制御ECU100にはIGリレー14とACCリレー15のオフに関係なくバッテリから電力供給される。
(A4)運転者がドアを開けると、カーテシセンサ12がドア開を検出する。
(A5)プッシュスタート制御ECU100はボディECU19を介してカーテシセンサ12によるドア開という検出結果を取得する。これと(A3)の電源のオフにより、プッシュスタート制御ECUのマイコン30は、ステアリングをロックする状況であると判定する。マイコン30は、ステアリングロックASSY200のマイコン41に正転命令を、後述するAND回路314にロック命令を出力する。
【0037】
この(A5)ロック命令が上記(1)のマイコン30のロック命令に相当する。したがって、プッシュスタート制御ECU100は、ハード回路31による残りの(2)(3)の条件が成立するか否かの判定結果に応じて、駆動許可出力をステアリングロックASSYに出力する。
(A6)ステアリングロックASSY200は駆動モータ43を正回転させてステアリングをロックする。ステアリングロックASSY200はロック完了をプッシュスタート制御ECU100に通知する。
【0038】
〔ステアリングロック解除の動作手順〕
ステアリングのロックが解除される状況の一例としては、乗員が車両に乗車し、エンジンスイッチ11を押下した場合が挙げられる。エンジンスイッチ11の押下時、乗員がブレーキペダルを踏み込めばエンジンが始動し、踏み込まなければ電源状態が遷移する(電源OFF→ACC
ONモード、IG ONモード(エンジンは始動しない))。いずれの場合でもステアリングのロックが解除される点では同様であるが、ここではエンジン始動を例にして説明する。
(B1)乗員(運転者)が電子キー18を携帯して乗車する。
(B2)運転者はエンジン始動の際、ブレーキペダルを踏み込むので、ボディECU19はブレーキペダルの踏み込みを検出する。
(B3)ボディECU19はブレーキペダルの踏み込みにより、プッシュスタート制御ECU100に電子キー18の照合を要求する。
(B4)プッシュスタート制御ECU100は、室内アンテナを用いて運転席を含む検知エリアを形成する(リクエスト電波を送信する)。
(B5)運転者が携帯する電子キー18はレスポンス電波をチューナに送信する。
(B6)プッシュスタート制御ECU100はレスポンス電波に含まれるIDコードの認証が成立するとボディECU19に認証OKを通知する。
(B7)運転者は、エンジン始動のため、シフトポジションをP(又はN)に設定し、エンジンスイッチ11を押下する。ボディECU19はエンジンスイッチの押下を検出する。
(B8)ボディECU19はエンジン始動条件(エンジンスイッチがオン、シフトポジション=P(又はN)、ブレーキペダルの踏み込み、認証OK)が満たされていることを検出すると、ACCリレー15及びIGリレー14を順にオンにする。
(B9)プッシュスタート制御ECU100のマイコン30は電源モードがIG ONモードに遷移したことを検出して、ステアリングロックASSY200のマイコン41に逆転命令を、後述するAND回路314にアンロック命令を出力する。
【0039】
この(B9)アンロック命令が上記(1)のマイコン30のアンロック命令に相当する。したがって、プッシュスタート制御ECU100は、ハード回路31による残りの(2)(3)の条件の判定結果に応じて、駆動許可出力をステアリングロックASSY200に出力する。
(B10)ステアリングロックASSY200は駆動モータ43を逆回転させてステアリングのロックを解除する。ステアリングロックASSY200はアンロック完了をプッシュスタート制御ECU100に通知する。
(B11)ボディECUは、プッシュスタート制御ECU100からアンロック完了の通知を取得して、エンジンECUにエンジン始動を要求する。
(B12)エンジンECUはスタータリレーをオンにしてエンジンを始動させる。ボディECU19は、エンジンECUからエンジン回転数又はエンジン始動通知を取得することで、エンジン始動を検出する。
【0040】
なお、上記の手順は車両の駆動力を内燃機関のみとする車両のエンジン始動方法であるが、電気モータを動力とする車両(EV)又は電気モータを一部の動力とする車両(HV)においても、ステアリングのロックの解除の手順はほぼ同じである。
【0041】
〔ハード回路について〕
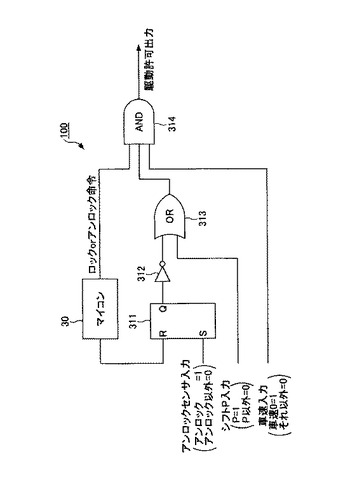
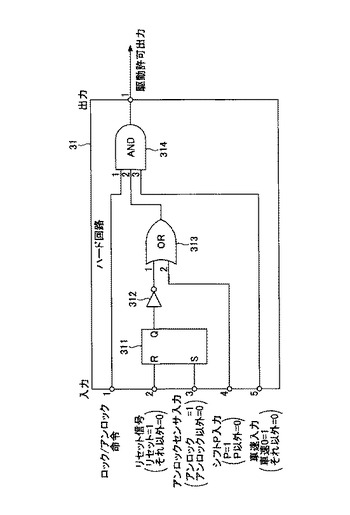
図5は、ハード回路31の構成図の一例である。ハード回路31は5つの入力ポートを有し、入力ポート1、2にはマイコン30が、入力ポート3にはアンロックセンサ23が、入力ポート4にはシフトポジションセンサ16が、入力ポート5には車速センサ17が、それぞれ接続されている。また、ハード回路31は1つの出力ポートを有し、出力ポートはモータ駆動回路42に接続されている。なお、入力ポート5に車速センサ17でなく、位置の変化量などの情報を入力してもよい。また、さらに入力ポートを設け、入力ポートからの情報をAND回路314の入力に供給することで、駆動許可出力の条件を厳格化できる。
【0042】
入力ポート1はAND回路314の第1の入力に、入力ポート2はラッチ回路311のR端子に、入力ポート3はラッチ回路311のS端子に、入力ポート4はOR回路313の第2の入力に、入力ポート5はAND回路314の第3の入力に、それぞれ接続されている。
【0043】
入力ポート1にはロック命令(アクティブHigh)又はアンロック命令(アクティブHigh)が入力され、入力ポート2にはリセット信号(アクティブHigh)が入力され、入力ポート3にはアンロックセンサ23の検出信号が、入力ポート4にはシフトポジションセンサ16の検出信号が、入力ポート5には車速が、それぞれ入力される。入力ポート3は、アンロックセンサ23の検出信号がアンロックを示す場合にHigh信号を生成し、それ以外の状態を示す場合にLow信号を生成する。入力ポート4は、シフトポジションセンサ16の検出信号がP(パーキング)を示す場合にHigh信号を生成し、それ以外の状態を示す場合にLow信号を生成する。入力ポート5は、車速がゼロの場合にHigh信号を生成し、それ以外の場合にLow信号を生成する。
【0044】
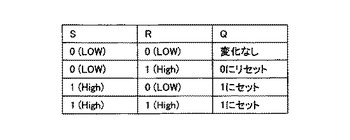
ラッチ回路311はいわゆるRSフリップフロップである。RSフリップフロップは、S端子とR端子の入力(H or L)の組み合わせに応じて、内部で保持する状態を変化させる。内部で保持されている状態は出力端子Qから観測される。
図6はS端子、R端子の入力とQ端子からの出力の関係を示す図の一例である。S端子がLow、R端子がLowの時、保持する情報に変化はない。図示するように、S端子がLow、R端子がHighの時、保持する情報はLOWにリセットされ、S端子がHigh、R端子がLowの時、保持する情報はLowにセットされる。S端子がHigh、R端子がHighの状態については後述する。
【0045】
ここで、マイコン30はロックセンサ24がロック位置を検出した時にだけ一時的にリセット信号を出力する。この時、ロックバー21はロック位置にあり、アンロックセンサ23はアンロック位置を検出しないので、S端子の入力はLowである。したがって、ステアリングシャフト25がロック状態になると、ラッチ回路311はLowにリセットされ、その状態を保持する。
【0046】
また、アンロックセンサ23はアンロック位置を検出するとHighを出力するので、S端子の入力はHighになる。この時、マイコン30はリセット信号を出力しないので、R端子の入力はLowとなる。したがって、ステアリングがアンロック状態になると、ラッチ回路311はHighにセットされ、その状態を保持する。このように、ラッチ回路311はステアリングがロック状態(Low)かアンロック状態(High)かを保持する。
【0047】
なお、一般にはS端子とR端子が共にHighとなることは禁止されるが、本実施形態ではS端子とR端子が共にHighの場合、ラッチ回路311はHighにセットされ、その状態を保持する。こうすることで、マイコン30に不具合が生じてリセット信号を継続的に出力した場合でも、ラッチ回路311はHigh(すなわちアンロック状態)を保持することができる。
【0048】
ラッチ回路311がいったんアンロック状態を記憶すると、マイコン30がリセット信号を出力しない限り、ロック状態を記憶しないので、アンロックセンサ23がアンロック位置以外の状態を検出しても、Q端子の出力がLowとなることはない。
【0049】
ラッチ回路311のQ端子はNOT回路312に接続されているので、ラッチ回路311がアンロック状態を保持しているとLowが、ロック状態を保持しているとHighが、OR回路313の第一入力に入力される。
【0050】
OR回路313の第二入力には、シフトポジションが“P”の場合にのみ、Highが入力されるので、車両の走行中にシフトポジションが“P”に設定されることがほとんどないと考えると、走行開始後、ラッチ回路311がアンロック状態を保持している間に、OR回路313がHighを出力することはない。
【0051】
AND回路314の第二入力にはOR回路313の出力が接続され、第三入力には車速がゼロの場合にのみ、Highが入力される。第一入力は上記のとおりロック命令又はアンロック命令である。
【0052】
このようなハード回路31によれば、(1)マイコン30がロック命令又はアンロック命令を出力し、(2)シフトポジションが“P”又はアンロックセンサ23がアンロック以外の状態を検出し、(3)車速がゼロ、の3条件が成立しない限り、駆動許可信号を出力しない。
【0053】
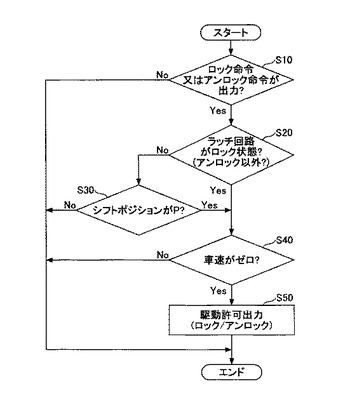
図7は、ハード回路31から得られるロック命令又はアンロック命令の駆動許可出力が出力される条件を説明するフローチャート図の一例である。
マイコン30がロック命令又はアンロック命令を出力する(S10のYes)。この時、ラッチ回路311がロック状態であれば(S20のYes)、車速がゼロの場合に(S40のYes)、ハード回路31は駆動許可出力をモータ駆動回路42に出力する(S50)。
【0054】
S20でラッチ回路311がロック状態でなくても(S20のNo)、シフトポジションが“P”であれば(S30のYes)、車速がゼロの場合に(S40のYes)、ハード回路31は駆動許可出力をモータ駆動回路42に出力する(S50)。
【0055】
走行中を想定すると、ラッチ回路311はアンロック状態であるので、シフトポジションが“P”であること及び車速がゼロであることの条件により、仮にマイコン30に不具合が生じても誤ロックを防止できる。
【0056】
また、走行中、振動などによりロックバー21がアンロック側からロック側にずれるような状態が生じると(ロックには至らなくても)、アンロックセンサ23はS端子にLowを入力する。しかし、それだけではマイコン30はリセット信号を出力しないので、ラッチ回路311はアンロック状態を保持したままである。よって、走行中は、仮にアンロックセンサ23がロックバー21の振動の影響を受けても誤ロックを防止できる。
【0057】
換言すれば、走行中、ラッチ回路311は、マイコン30に不具合が生じリセット信号を継続的に出力し、かつ、ロックバー21がアンロック側からロック側にずれない限り、アンロック状態を保持する。万一、この状況が生じたとしても、車速がゼロでマイコン30がロック命令を出力しない限り誤ロックを防止できる。
一方、駐車時に乗員がエンジンスイッチを押下してステアリングがロックされた場合、ラッチ回路311はロック状態を保持する。このため、NOT回路312はHighを出力するので、OR回路313はシフトポジションに関係なくHighを出力する。したがって、運転者はシフトポジションがNでもステアリングのロックを解除することができる(エンジン始動することができるか否かは車両の仕様によるが、少なくともステアリングのロックの解除条件が影響することはない)。
【0058】
このため、例えばシフトポジションを“P”にして乗員がエンジンスイッチ11を押下した後、短時間にシフトポジションをN(P以外)にしても、アンロックセンサ23がアンロックを検出するまではラッチ回路311はLowを出力する(NOT回路312はHighを出力する)。OR回路313はシフトポジションの状態を無効にして、AND回路314にHighを出力するので、ロックバー21の位置がアンロック位置に到達せずに止まることもない。
【0059】
以上説明したように、本実施形態のステアリングロック装置300は、ラッチ回路311がアンロック状態を記憶することで、マイコン30の不具合により意図しないロック又はアンロックが起こることを防止できる。また、シフトポジションに関係なくステアリングのロックを解除することができる。
【符号の説明】
【0060】
16 シフトポジションセンサ
17 車速センサ
18 電子キー
21 ロックバー
23 アンロックセンサ
24 ロックセンサ
30,41 マイコン
42 モータ駆動回路
43 ステアリングロック駆動モータ
100 プッシュスタート制御ECU
200 ステアリングロックASSY
300 ステアリングロック装置
311 ラッチ回路
【技術分野】
【0001】
本発明は、ステアリングの回転を制限するステアリングロック駆動回路に関する。
【背景技術】
【0002】
車両には盗難防止用にステアリングシャフトの回転をロックするロック機構が搭載されている。例えば、メカニカルキーがキーシリンダから抜かれた状態で乗員等がステアリングを回すと、ステアリングの回転が制限されるようになる。また、車両がキーを認証して、エンジン始動などを許可する電子キーシステムの場合、予め定められた条件が成立するとロック機構がステアリングシャフトの回転をロックする(以下、単に「ステアリングをロックする」という)。後者を電子式ステアリングロックシステムという。
【0003】
図1は、従来の電子式ステアリングロックシステムの一例を説明する図である。統合マイクロコンピュータ230は、電子キーの認証が成立したという認証結果を取得すると、イグニッションがオフしていること等を条件に、ロック用電源供給命令ポート330からAND回路430にロック電源供給命令を出力する。このAND回430にはOR回路410を介してシフトポジションが“P”の時に“1”となる信号が供給されている。したがって、図1では、イグニッションがオフ、シフトポジションが“P”になるとステアリングがロックされる。走行中にこの成立条件が成立することはないとしてよいので、走行中に誤作動してステアリングがロックされることはない。
【0004】
また、図1の保護回路380は統合ECUがソフト的に実現するのでなく、ハード的な回路により実現されている。このため、統合ECU(統合マイクロコンピュータ230)の動作に不具合が生じても保護回路380は影響を受けず、ステアリングをロックするための条件の成立を正確に判定できる。
【0005】
また、アンロック時は、統合マイクロコンピュータ230がアンロック信号をOR回路420に出力することでステアリングのロックが解除されるので、シフトポジションが“P”以外でもステアリングロックを解除できる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2010−264836号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、図のような回路では、統合マイクロコンピュータ230が起動中や統合マイクロコンピュータ230に不具合が生じている場合、ステアリングロックが解除されるおそれがある。例えば、統合マイクロコンピュータ230がアンロック信号をOR回路420に出力するだけでアンロックされてしまう。
【0008】
このような解除を防ぐため、ロック信号と同様にシフトポジション信号をアンロックの条件とすることが考えられるが、そうするとシフトポジションが“P”でなければステアリングのロックを解除できなくなってしまう。
【0009】
エンジン始動時の乗員の動作を考慮すると、従来のメカニカルキーによるエンジン始動では、シフトポジションは“N”でもエンジン始動が可能であった。これに対し、電子キーシステムではシフトポジションが“P”でなければステアリングロックを解除できないことになる。すなわち、実質的にシフトポジションPでなければエンジン始動できない。このため、乗員によっては不便と感じるおそれがある。
【0010】
仮に、シフトポジションを“P”にして乗員がエンジン始動した場合でも、乗員がエンジンスイッチ(スタートボタン)を押下した後、短時間に(連続した動作で)シフトポジションをN(P以外)にすると、ステアリングロックの解除の途中にシフトポジションが“N”になるおそれがある。この場合、ステアリングシャフトをロックするロックバーの位置がアンロック位置まで到達していないので、乗員は再度、エンジン始動をやり直す必要に迫られるおそれがある。
【0011】
本発明は、上記課題に鑑み、マイコンの不具合により意図しないロック又はアンロックが起こることなく、シフトポジションに関係なくロックの解除が可能なステアリングロック駆動回路を提供することを目的とする。
【課題を解決するための手段】
【0012】
本発明は、車両状況の検出結果に応じてステアリングのロック命令又はアンロック命令を出力するマイコンと、ステアリングをロックするロック部材がアンロック位置にあることを検出するアンロックセンサから取得した、アンロック信号を保持するラッチ回路と、前記ラッチ回路の論理否定の信号と、シフトポジションがパーキング位置であることを示すパーキング信号を入力とする論理和回路と、前記ロック命令又は前記アンロック命令、前記論理和回路の出力、及び、車両から検出された情報が所定の条件を満たす場合に生成される条件一致信号を入力とする論理積回路と、を有するステアリングロック駆動回路を提供する。
【発明の効果】
【0013】
マイコンの不具合により意図しないロック又はアンロックが起こることなく、シフトポジションに関係なくロックの解除が可能なステアリングロック駆動回路を提供することができる。
【図面の簡単な説明】
【0014】
【図1】従来のステアリングロックの成立条件の一例を説明する図である。
【図2】本実施形態のステアリングロック装置の特徴部を説明する図の一例である。
【図3】ステアリングロック装置の概略構成図の一例である。
【図4】ステアリングロック装置のシステム構成を説明する図の一例である。
【図5】ハード回路の構成図の一例である。
【図6】S端子、R端子の入力とQ端子からの出力の関係を示す図の一例である。
【図7】ハード回路から得られるロック命令又はアンロック命令の駆動許可出力が出力される条件を説明するフローチャート図の一例である。
【発明を実施するための形態】
【0015】
以下、本発明を実施するための形態について図面を参照しながら説明する。
図2は、本実施形態のプッシュスタート制御ECU100の特徴部を説明する図の一例である。図示するように、プッシュスタート制御ECU100は、以下の3つの条件が成立する場合に、ステアリングをロック又はアンロックする。
(1)マイコンのロック命令又はアンロック命令
(2)アンロックセンサがアンロック位置以外を検出又はシフトポジションが“P”
(3)車速がゼロ
走行中を想定すると、ロックバーはアンロック位置にあるはずである。このため、アンロックセンサはアンロック位置=“1”を出力する。ラッチ回路311はセット又はリセットされた状態を保持するので、アンロック位置=“1”を保持する。ラッチ回路311の出力はNOT回路312で“0”に反転されるので、ラッチ回路311からOR回路313への入力は“0”である。OR回路313にはシフトポジションセンサの検出信号が入力されるが、走行中にシフトポジションがPになることは極めてまれである。したがって、走行中に、AND回路314が駆動許可出力を出力することはない。また、仮にマイコンが不具合を起こしても、走行中はシフトポジションと車速により誤ロックを防止できる。
【0016】
また、アンロックセンサが振動などによりロック位置を検出しても、ラッチ回路311は“1”の状態を保持している。このため、走行中にロックバーが移動してロック位置が検出されても、ラッチ回路311が“0”を出力するおそれはない。
【0017】
また、駐車中、アンロックセンサはロック位置を検出している。すなわち、ラッチ回路311は“0”を保持する。ラッチ回路311の出力はNOT回路312で“1”に反転されるので、ラッチ回路311からOR回路313への入力は“1”である。ここで、乗員(運転者を含む)がアンロック操作(エンジン始動操作)を行う際、シフトポジションを“P”にしなかったとする。このため、OR回路313にはシフトポジションセンサの検出信号として“0”が入力されるが、NOT回路312から“1”が入力されるため、OR回路313は“1”をAND回路314に出力する。このため、マイコン30がアンロック命令を出力し、車速がゼロであれば、シフトポジションの位置に関係なくステアリングのロックが解除される(エンジン始動される)。
【0018】
従って、本実施形態のプッシュスタート制御ECU100は、ラッチ回路311がアンロックセンサの検出結果を保持することで、マイコン30の不具合などによる走行中の誤ロックをより確実に防止し、かつ、シフトポジションが“P”以外でもアンロックを可能にすることができる。
【0019】
〔構成例〕
図3は、本実施形態のステアリングロック装置300の概略構成図の一例を示す。ステアリングロック装置300は、プッシュスタート制御ECU100及びステアリングロックASSY200を有する。両者のマイコン30と41は、例えばLIN(Local Interconnect Network)やCAN(Controller Area Network)の車載ネットワークを介して接続されている。また、プッシュスタート制御ECU100のハード回路31とステアリングロックASSY200のモータ駆動回路42は直接、接続されている。
【0020】
プッシュスタート制御ECU100は、マイコン30及びハード回路31を有する。マイコン30は、CPU、RAM、ROM、CANC(CAN Controller)、及び、入出力I/O等がバスを介して接続されたコンピュータである。マイコン30は、CPUがROMに記憶されたプログラムを実行することで、制御命令、リセット信号、及び、ロック命令/アンロック命令を出力するか否かを判定している。
【0021】
プッシュスタート制御ECU100のマイコン30は、配線Aを介して制御命令をステアリングロックASSY200のマイコン41に送信する。制御命令には、ロックのための正転命令、アンロックのための逆転命令、ロック又はアンロックを停止させる停止命令等がある。また、ステアリングロックASSY200のマイコン41は、配線Aを介してプッシュスタート制御ECU100のマイコン30に、ロック完了、アンロック完了、又は、停止完了などの動作情報を通知する。
【0022】
また、プッシュスタート制御ECU100は、配線Bを介して駆動許可出力をステアリングロックASSY200に出力する。プッシュスタート制御ECU100は、ステアリングをロックする時もステアリングのロックを解除する時も駆動許可出力をステアリングロックASSY200に出力する。ロックかアンロックかを制御するのは配線Aの制御命令である。
【0023】
ハード回路31は、駆動許可出力を出力する条件が成立したか否かをハード的に判定し、駆動許可出力を出力する回路である。マイコン30とハード回路31は、ロック命令又はアンロック命令の出力判定と、駆動許可出力の出力判定において重複した条件を判定してもよいし、全く異なる条件を判定してもよい。
【0024】
ステアリングロックASSY200は、マイコン41、モータ駆動回路42及ぶステアリングロック駆動モータ(以下、単に駆動モータという)43を有する。マイコン41は、CPU、RAM、ROM、CANC(CAN Controller)、及び、入出力I/O等がバスを介して接続されたコンピュータである。マイコン41は、マイコン30からの制御命令に基づき、モータ駆動回路42の回転、停止及び回転方向を制御する。
【0025】
マイコン41がマイコン30から正転命令を受信した場合、マイコン41は駆動モータ43の回転方向をロック側(正転側)に制御する。マイコン41がマイコン30から逆転命令を受信した場合、マイコン41は駆動モータ43の回転方向をアンロック側(逆転側)に制御する。モータ駆動回路42は、駆動許可出力を受け付けると駆動電流を生成し、駆動モータ43に供給する。なお、駆動モータ43は例えばDCモータである。
【0026】
図4は、ステアリングロック装置300のシステム構成を説明する図の一例である。まず、ボディECU19には、エンジンスイッチ11、カーテシセンサ12、ストップランプスイッチ13、シフトポジションセンサ16、IGリレー14、ACCリレー15、車速センサ17及びプッシュスタート制御ECU100が接続されている。
【0027】
エンジンスイッチ11は押しボタン式のモーメンタリスイッチであり、内部から初期位置方向に弾性体による付勢力が与えられている。すなわち、運転者が押している間だけオン信号を出力する。カーテシセンサ12はドアの開閉を検出するセンサであり、ドア毎に配置されている。ストップランプスイッチ13は、ブレーキペダルの踏み込み時にオンとなるスイッチである。
【0028】
ACCリレー15は、バッテリからアクセサリー機器と呼ばれる機器(オーディオ類、ナビ、室内灯等)に供給される電源をオン又はオフするリレーである。IGリレー14は、バッテリから走行時に必要な機器(メーター系、ワイパー、イグニッションコイル、インジェクタなど)に供給される電源をオン又はオフするリレーである。シフトポジションセンサ16は、シフトレバーの位置(シフトポジション)を検知し、検知されたシフトポジションに応じた電気信号を出力する。車速センサ17は、例えば、車輪の回転に連動してパルス信号を出力するセンサであり、各ECUは単位時間のパルス数から車速を求めることができる。
【0029】
プッシュスタート制御ECU100は、不図示の室内アンテナ及び室外アンテナと接続されており、電子キー18と通信する。ドアロック状態では、プッシュスタート制御ECU100は、室外アンテナを用いて車両の外に電子キー18の検知エリアを形成する。検知エリアは室外アンテナからリクエスト電波が届く範囲である。また、プッシュスタート制御ECU100は、運転席ドアの開閉、ブレーキペダルの踏み込み、エンジンスイッチ11のオンの際など、予め決まった状況で、室内アンテナを用いて車内に電子キー18の検知エリアを形成する。
【0030】
プッシュスタート制御ECU100は検知エリアの電子キー18にIDコードのリクエスト電波を送信する。運転者が携帯する電子キー18はIDコードが含まれるレスポンス電波を送信する。プッシュスタート制御ECU100はチューナでレスポンス電波を受信し、受信したIDコードが予め記憶するIDコードと一致するか否かにより電子キー18を認証する。
【0031】
ボディECU19は、電子キー18の認証結果などに基づき、エンジン始動及び停止を管理している。ステアリングのロックは例えばエンジン始動の一連の手順の中で行われ、ステアリングのロックの解除は例えばエンジン停止の一連の手順の中で行われる。ステアリングのロック及びステアリングのロックの解除の手順については後述する。
【0032】
駆動モータ43はロックバー21をステアリングシャフト25に対し接近する方向と離間する方向に駆動する。ロックバー21には、位置検出用に例えば永久磁石22が固定されている。ロックバー21と対向する場所(例えば、ステアリングロックASSY200の基板上)にはアンロックセンサ23とロックセンサ24が固定されている。アンロックセンサ23及びロックセンサ24は例えばホール素子を有し、永久磁石22の位置により変化する磁束密度を検出している。したがって、アンロックセンサ23はロックバー21がアンロック位置にあることを、ロックセンサ24はロックバー21がロック位置にあることを、それぞれ検出する。
【0033】
アンロックセンサ23とロックセンサ24はプッシュスタート制御ECU100に接続されており、プッシュスタート制御ECU100はロックバー21がアンロック状態又はロック状態となっていることを検出することができる。
【0034】
駆動許可出力により、ステアリングロックASSY200が駆動モータ43を正方向に回転させると、ロックバー21がステアリングシャフト25に接近する方向に移動する。ステアリングシャフト25は、軸の円周に複数の凹部を有し、ロックバー21が接近するとロックバー21の先端とこの凹部が係合する。係合した状態では、ロックバー21がステアリングシャフト25の回転を制限するロック状態となる。ステアリングロックASSY200は、ロックセンサ24の出力によりロックバー21がロック状態になったことを検出すると駆動モータ43を停止する。
【0035】
同様に、駆動許可出力により、ステアリングロックASSY200が駆動モータ43を逆方向に回転させると、ロックバー21がステアリングシャフト25と離間する方向に移動する。この移動により、ロックバー21の先端と凹部の係合が解消された、アンロック状態となる。ステアリングロックASSY200は、アンロックセンサ23の出力によりロックバー21がアンロック状態になったことを検出すると駆動モータ43を停止する。
【0036】
〔ステアリングロックの動作手順〕
ステアリングがロックされる状況の一例としては、乗員がエンジン停止後、降車した場合が挙げられる。
(A1)車両の停車後(車速はゼロ)、乗員はシフトポジションを例えば“P”にしてエンジンスイッチ11を押下する。
(A2)ボディECU19は、シフトポジション=Pをシフトポジションセンサ16から検出し、車速センサ17から車速がゼロであることを検出し、エンジンを停止可能な状況であると判定する。これにより、IGリレー14とACCリレー15をオフにする。これによりエンジンは停止する。
(A3)プッシュスタート制御ECU100はIGリレー14とACCリレー15のオフを検出する。なお、プッシュスタート制御ECU100にはIGリレー14とACCリレー15のオフに関係なくバッテリから電力供給される。
(A4)運転者がドアを開けると、カーテシセンサ12がドア開を検出する。
(A5)プッシュスタート制御ECU100はボディECU19を介してカーテシセンサ12によるドア開という検出結果を取得する。これと(A3)の電源のオフにより、プッシュスタート制御ECUのマイコン30は、ステアリングをロックする状況であると判定する。マイコン30は、ステアリングロックASSY200のマイコン41に正転命令を、後述するAND回路314にロック命令を出力する。
【0037】
この(A5)ロック命令が上記(1)のマイコン30のロック命令に相当する。したがって、プッシュスタート制御ECU100は、ハード回路31による残りの(2)(3)の条件が成立するか否かの判定結果に応じて、駆動許可出力をステアリングロックASSYに出力する。
(A6)ステアリングロックASSY200は駆動モータ43を正回転させてステアリングをロックする。ステアリングロックASSY200はロック完了をプッシュスタート制御ECU100に通知する。
【0038】
〔ステアリングロック解除の動作手順〕
ステアリングのロックが解除される状況の一例としては、乗員が車両に乗車し、エンジンスイッチ11を押下した場合が挙げられる。エンジンスイッチ11の押下時、乗員がブレーキペダルを踏み込めばエンジンが始動し、踏み込まなければ電源状態が遷移する(電源OFF→ACC
ONモード、IG ONモード(エンジンは始動しない))。いずれの場合でもステアリングのロックが解除される点では同様であるが、ここではエンジン始動を例にして説明する。
(B1)乗員(運転者)が電子キー18を携帯して乗車する。
(B2)運転者はエンジン始動の際、ブレーキペダルを踏み込むので、ボディECU19はブレーキペダルの踏み込みを検出する。
(B3)ボディECU19はブレーキペダルの踏み込みにより、プッシュスタート制御ECU100に電子キー18の照合を要求する。
(B4)プッシュスタート制御ECU100は、室内アンテナを用いて運転席を含む検知エリアを形成する(リクエスト電波を送信する)。
(B5)運転者が携帯する電子キー18はレスポンス電波をチューナに送信する。
(B6)プッシュスタート制御ECU100はレスポンス電波に含まれるIDコードの認証が成立するとボディECU19に認証OKを通知する。
(B7)運転者は、エンジン始動のため、シフトポジションをP(又はN)に設定し、エンジンスイッチ11を押下する。ボディECU19はエンジンスイッチの押下を検出する。
(B8)ボディECU19はエンジン始動条件(エンジンスイッチがオン、シフトポジション=P(又はN)、ブレーキペダルの踏み込み、認証OK)が満たされていることを検出すると、ACCリレー15及びIGリレー14を順にオンにする。
(B9)プッシュスタート制御ECU100のマイコン30は電源モードがIG ONモードに遷移したことを検出して、ステアリングロックASSY200のマイコン41に逆転命令を、後述するAND回路314にアンロック命令を出力する。
【0039】
この(B9)アンロック命令が上記(1)のマイコン30のアンロック命令に相当する。したがって、プッシュスタート制御ECU100は、ハード回路31による残りの(2)(3)の条件の判定結果に応じて、駆動許可出力をステアリングロックASSY200に出力する。
(B10)ステアリングロックASSY200は駆動モータ43を逆回転させてステアリングのロックを解除する。ステアリングロックASSY200はアンロック完了をプッシュスタート制御ECU100に通知する。
(B11)ボディECUは、プッシュスタート制御ECU100からアンロック完了の通知を取得して、エンジンECUにエンジン始動を要求する。
(B12)エンジンECUはスタータリレーをオンにしてエンジンを始動させる。ボディECU19は、エンジンECUからエンジン回転数又はエンジン始動通知を取得することで、エンジン始動を検出する。
【0040】
なお、上記の手順は車両の駆動力を内燃機関のみとする車両のエンジン始動方法であるが、電気モータを動力とする車両(EV)又は電気モータを一部の動力とする車両(HV)においても、ステアリングのロックの解除の手順はほぼ同じである。
【0041】
〔ハード回路について〕
図5は、ハード回路31の構成図の一例である。ハード回路31は5つの入力ポートを有し、入力ポート1、2にはマイコン30が、入力ポート3にはアンロックセンサ23が、入力ポート4にはシフトポジションセンサ16が、入力ポート5には車速センサ17が、それぞれ接続されている。また、ハード回路31は1つの出力ポートを有し、出力ポートはモータ駆動回路42に接続されている。なお、入力ポート5に車速センサ17でなく、位置の変化量などの情報を入力してもよい。また、さらに入力ポートを設け、入力ポートからの情報をAND回路314の入力に供給することで、駆動許可出力の条件を厳格化できる。
【0042】
入力ポート1はAND回路314の第1の入力に、入力ポート2はラッチ回路311のR端子に、入力ポート3はラッチ回路311のS端子に、入力ポート4はOR回路313の第2の入力に、入力ポート5はAND回路314の第3の入力に、それぞれ接続されている。
【0043】
入力ポート1にはロック命令(アクティブHigh)又はアンロック命令(アクティブHigh)が入力され、入力ポート2にはリセット信号(アクティブHigh)が入力され、入力ポート3にはアンロックセンサ23の検出信号が、入力ポート4にはシフトポジションセンサ16の検出信号が、入力ポート5には車速が、それぞれ入力される。入力ポート3は、アンロックセンサ23の検出信号がアンロックを示す場合にHigh信号を生成し、それ以外の状態を示す場合にLow信号を生成する。入力ポート4は、シフトポジションセンサ16の検出信号がP(パーキング)を示す場合にHigh信号を生成し、それ以外の状態を示す場合にLow信号を生成する。入力ポート5は、車速がゼロの場合にHigh信号を生成し、それ以外の場合にLow信号を生成する。
【0044】
ラッチ回路311はいわゆるRSフリップフロップである。RSフリップフロップは、S端子とR端子の入力(H or L)の組み合わせに応じて、内部で保持する状態を変化させる。内部で保持されている状態は出力端子Qから観測される。
図6はS端子、R端子の入力とQ端子からの出力の関係を示す図の一例である。S端子がLow、R端子がLowの時、保持する情報に変化はない。図示するように、S端子がLow、R端子がHighの時、保持する情報はLOWにリセットされ、S端子がHigh、R端子がLowの時、保持する情報はLowにセットされる。S端子がHigh、R端子がHighの状態については後述する。
【0045】
ここで、マイコン30はロックセンサ24がロック位置を検出した時にだけ一時的にリセット信号を出力する。この時、ロックバー21はロック位置にあり、アンロックセンサ23はアンロック位置を検出しないので、S端子の入力はLowである。したがって、ステアリングシャフト25がロック状態になると、ラッチ回路311はLowにリセットされ、その状態を保持する。
【0046】
また、アンロックセンサ23はアンロック位置を検出するとHighを出力するので、S端子の入力はHighになる。この時、マイコン30はリセット信号を出力しないので、R端子の入力はLowとなる。したがって、ステアリングがアンロック状態になると、ラッチ回路311はHighにセットされ、その状態を保持する。このように、ラッチ回路311はステアリングがロック状態(Low)かアンロック状態(High)かを保持する。
【0047】
なお、一般にはS端子とR端子が共にHighとなることは禁止されるが、本実施形態ではS端子とR端子が共にHighの場合、ラッチ回路311はHighにセットされ、その状態を保持する。こうすることで、マイコン30に不具合が生じてリセット信号を継続的に出力した場合でも、ラッチ回路311はHigh(すなわちアンロック状態)を保持することができる。
【0048】
ラッチ回路311がいったんアンロック状態を記憶すると、マイコン30がリセット信号を出力しない限り、ロック状態を記憶しないので、アンロックセンサ23がアンロック位置以外の状態を検出しても、Q端子の出力がLowとなることはない。
【0049】
ラッチ回路311のQ端子はNOT回路312に接続されているので、ラッチ回路311がアンロック状態を保持しているとLowが、ロック状態を保持しているとHighが、OR回路313の第一入力に入力される。
【0050】
OR回路313の第二入力には、シフトポジションが“P”の場合にのみ、Highが入力されるので、車両の走行中にシフトポジションが“P”に設定されることがほとんどないと考えると、走行開始後、ラッチ回路311がアンロック状態を保持している間に、OR回路313がHighを出力することはない。
【0051】
AND回路314の第二入力にはOR回路313の出力が接続され、第三入力には車速がゼロの場合にのみ、Highが入力される。第一入力は上記のとおりロック命令又はアンロック命令である。
【0052】
このようなハード回路31によれば、(1)マイコン30がロック命令又はアンロック命令を出力し、(2)シフトポジションが“P”又はアンロックセンサ23がアンロック以外の状態を検出し、(3)車速がゼロ、の3条件が成立しない限り、駆動許可信号を出力しない。
【0053】
図7は、ハード回路31から得られるロック命令又はアンロック命令の駆動許可出力が出力される条件を説明するフローチャート図の一例である。
マイコン30がロック命令又はアンロック命令を出力する(S10のYes)。この時、ラッチ回路311がロック状態であれば(S20のYes)、車速がゼロの場合に(S40のYes)、ハード回路31は駆動許可出力をモータ駆動回路42に出力する(S50)。
【0054】
S20でラッチ回路311がロック状態でなくても(S20のNo)、シフトポジションが“P”であれば(S30のYes)、車速がゼロの場合に(S40のYes)、ハード回路31は駆動許可出力をモータ駆動回路42に出力する(S50)。
【0055】
走行中を想定すると、ラッチ回路311はアンロック状態であるので、シフトポジションが“P”であること及び車速がゼロであることの条件により、仮にマイコン30に不具合が生じても誤ロックを防止できる。
【0056】
また、走行中、振動などによりロックバー21がアンロック側からロック側にずれるような状態が生じると(ロックには至らなくても)、アンロックセンサ23はS端子にLowを入力する。しかし、それだけではマイコン30はリセット信号を出力しないので、ラッチ回路311はアンロック状態を保持したままである。よって、走行中は、仮にアンロックセンサ23がロックバー21の振動の影響を受けても誤ロックを防止できる。
【0057】
換言すれば、走行中、ラッチ回路311は、マイコン30に不具合が生じリセット信号を継続的に出力し、かつ、ロックバー21がアンロック側からロック側にずれない限り、アンロック状態を保持する。万一、この状況が生じたとしても、車速がゼロでマイコン30がロック命令を出力しない限り誤ロックを防止できる。
一方、駐車時に乗員がエンジンスイッチを押下してステアリングがロックされた場合、ラッチ回路311はロック状態を保持する。このため、NOT回路312はHighを出力するので、OR回路313はシフトポジションに関係なくHighを出力する。したがって、運転者はシフトポジションがNでもステアリングのロックを解除することができる(エンジン始動することができるか否かは車両の仕様によるが、少なくともステアリングのロックの解除条件が影響することはない)。
【0058】
このため、例えばシフトポジションを“P”にして乗員がエンジンスイッチ11を押下した後、短時間にシフトポジションをN(P以外)にしても、アンロックセンサ23がアンロックを検出するまではラッチ回路311はLowを出力する(NOT回路312はHighを出力する)。OR回路313はシフトポジションの状態を無効にして、AND回路314にHighを出力するので、ロックバー21の位置がアンロック位置に到達せずに止まることもない。
【0059】
以上説明したように、本実施形態のステアリングロック装置300は、ラッチ回路311がアンロック状態を記憶することで、マイコン30の不具合により意図しないロック又はアンロックが起こることを防止できる。また、シフトポジションに関係なくステアリングのロックを解除することができる。
【符号の説明】
【0060】
16 シフトポジションセンサ
17 車速センサ
18 電子キー
21 ロックバー
23 アンロックセンサ
24 ロックセンサ
30,41 マイコン
42 モータ駆動回路
43 ステアリングロック駆動モータ
100 プッシュスタート制御ECU
200 ステアリングロックASSY
300 ステアリングロック装置
311 ラッチ回路
【特許請求の範囲】
【請求項1】
車両状況の検出結果に応じてステアリングのロック命令又はアンロック命令を出力するマイコンと、
ステアリングをロックするロック部材がアンロック位置にあることを検出するアンロックセンサから取得した、アンロック信号を保持するラッチ回路と、
前記ラッチ回路の論理否定の信号と、シフトポジションがパーキング位置であることを示すパーキング信号を入力とする論理和回路と、
前記ロック命令又は前記アンロック命令、前記論理和回路の出力、及び、車両から検出された情報が所定の条件を満たす場合に生成される条件一致信号、を入力とする論理積回路と、
を有するステアリングロック駆動回路。
【請求項2】
前記ラッチ回路は、前記ロック部材がロック位置にあることを検出するロックセンサから取得したロック信号と共に、前記マイコンからリセット信号が出力された場合に、ロック信号を保持する、
ことを特徴とする請求項1記載のステアリングロック駆動回路。
【請求項3】
前記ラッチ回路は、前記アンロックセンサから取得した前記アンロック信号と共に、前記リセット信号が出力された場合、前記アンロック信号の保持を継続する、
ことを特徴とする請求項2記載のステアリングロック駆動回路。
【請求項4】
前記条件一致信号は、車速がゼロである場合に前記論理積回路に入力される、
ことを特徴とする請求項1〜3いずれか1項記載のステアリングロック駆動回路。
【請求項5】
車両状況の検出結果に応じてステアリングのロック命令又はアンロック命令を出力するマイコンと、
ステアリングをロックするロック部材がアンロック位置にあることを検出するアンロックセンサから取得した、アンロック信号を保持するラッチ回路と、
前記ラッチ回路の論理否定の信号と、シフトポジションがパーキング位置であることを示すパーキング信号を入力とする論理和回路と、
前記ロック命令又は前記アンロック命令、前記論理和回路の出力、及び、車両から検出された情報が所定の条件を満たす場合に生成される条件一致信号を入力とする論理積回路と、
前記ロック部材がアンロック位置にあることを検出するアンロックセンサと、
前記ロック部材がロック位置にあることを検出するロックセンサと、
前記ロック部材の位置を駆動するモータと、
前記論理積回路からの駆動許可出力により前記モータに電流を出力するモータ駆動回路と、
前記モータの回転を制御するモータ制御部と、
を有するステアリングロック装置。
【請求項1】
車両状況の検出結果に応じてステアリングのロック命令又はアンロック命令を出力するマイコンと、
ステアリングをロックするロック部材がアンロック位置にあることを検出するアンロックセンサから取得した、アンロック信号を保持するラッチ回路と、
前記ラッチ回路の論理否定の信号と、シフトポジションがパーキング位置であることを示すパーキング信号を入力とする論理和回路と、
前記ロック命令又は前記アンロック命令、前記論理和回路の出力、及び、車両から検出された情報が所定の条件を満たす場合に生成される条件一致信号、を入力とする論理積回路と、
を有するステアリングロック駆動回路。
【請求項2】
前記ラッチ回路は、前記ロック部材がロック位置にあることを検出するロックセンサから取得したロック信号と共に、前記マイコンからリセット信号が出力された場合に、ロック信号を保持する、
ことを特徴とする請求項1記載のステアリングロック駆動回路。
【請求項3】
前記ラッチ回路は、前記アンロックセンサから取得した前記アンロック信号と共に、前記リセット信号が出力された場合、前記アンロック信号の保持を継続する、
ことを特徴とする請求項2記載のステアリングロック駆動回路。
【請求項4】
前記条件一致信号は、車速がゼロである場合に前記論理積回路に入力される、
ことを特徴とする請求項1〜3いずれか1項記載のステアリングロック駆動回路。
【請求項5】
車両状況の検出結果に応じてステアリングのロック命令又はアンロック命令を出力するマイコンと、
ステアリングをロックするロック部材がアンロック位置にあることを検出するアンロックセンサから取得した、アンロック信号を保持するラッチ回路と、
前記ラッチ回路の論理否定の信号と、シフトポジションがパーキング位置であることを示すパーキング信号を入力とする論理和回路と、
前記ロック命令又は前記アンロック命令、前記論理和回路の出力、及び、車両から検出された情報が所定の条件を満たす場合に生成される条件一致信号を入力とする論理積回路と、
前記ロック部材がアンロック位置にあることを検出するアンロックセンサと、
前記ロック部材がロック位置にあることを検出するロックセンサと、
前記ロック部材の位置を駆動するモータと、
前記論理積回路からの駆動許可出力により前記モータに電流を出力するモータ駆動回路と、
前記モータの回転を制御するモータ制御部と、
を有するステアリングロック装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−10438(P2013−10438A)
【公開日】平成25年1月17日(2013.1.17)
【国際特許分類】
【出願番号】特願2011−144746(P2011−144746)
【出願日】平成23年6月29日(2011.6.29)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年1月17日(2013.1.17)
【国際特許分類】
【出願日】平成23年6月29日(2011.6.29)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]