
ステアリング操舵力センサ

【課題】既存のステアリングホイールに内蔵された各種機能が使用でき、且つ、通常時に近い操舵をドライバが行うことができ、操舵力を精度良く計測することが可能なステアリング操舵力センサを提供する。
【解決手段】中空リング形状のホイール部10と、ホイール部10に等間隔に配置され、ホイール部10の下方に固定された複数の荷重計31からなる操舵力計測部30と、ホイール部10の中心がステアリングシャフトBの回転軸心を通るように、操舵力計測部30をステアリングホイールAへ取り付けるための取付部30をステアリング操舵力センサ10が備える。荷重計31は、ステアリングシャフトBの回転軸心方向の応力によって生ずるひずみ変形が反対方向に相等しくなるように形成された一対の起ひずみ部を有する起ひずみ体31aと、起ひずみ部に生ずるひずみ変形量をそれぞれ検出するよう起ひずみ部に貼着されたひずみゲージを具備する。
【解決手段】中空リング形状のホイール部10と、ホイール部10に等間隔に配置され、ホイール部10の下方に固定された複数の荷重計31からなる操舵力計測部30と、ホイール部10の中心がステアリングシャフトBの回転軸心を通るように、操舵力計測部30をステアリングホイールAへ取り付けるための取付部30をステアリング操舵力センサ10が備える。荷重計31は、ステアリングシャフトBの回転軸心方向の応力によって生ずるひずみ変形が反対方向に相等しくなるように形成された一対の起ひずみ部を有する起ひずみ体31aと、起ひずみ部に生ずるひずみ変形量をそれぞれ検出するよう起ひずみ部に貼着されたひずみゲージを具備する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両のステアリングホイールに作用する操舵力を計測するステアリング操舵力センサに関する。
【背景技術】
【0002】
自動車等の車両のステアリングホイール(ステアリングハンドル)に作用する操舵力を計測するセンサは、一般に、特許文献1に示されるように、ステアリングコラムに検出部が予め組み込まれている。このセンサは、ステアリングホイールに作用する操舵力によって、該ステアリングホイールに機械的に連結されたステアリングシャフトに生じたねじれ変形量を電気信号として検出している。このようなセンサを既存車両に組み込む場合、ステアリングコラムを分解して、改造する必要がある。しかし、このような改造は専門の知識、設備、時間が要求されるため、非常に困難であり、現実的ではない。
【0003】
一方、特許文献2に示されるように、ステアリングシャフトに取り付けるステアリングホイール形状のセンサがある。このセンサは、操舵力検出部単体又は角度検出器を組み合わせて有し、計測対象車に装備された既存のステアリングホイールを取り外して交換し、計測を行う。このセンサは、ホイール部とその裏側において計測部が固定されるステアリングシャフトとの間に操舵時のホイール部の回転操舵により生じるねじれ変形量を、ひずみゲージ等を用いて検出することによって、操舵力を直接的に計測する。ひずみゲージ等からなる操舵力計測器は、ステアリングシャフトと同一中心軸上に位置するホイール部のスポーク部分に内蔵されている。しかし、既存のステアリングホイールを取り外すため、該ステアリングホイールに内蔵された各種装置、例えばエアバッグや方向指示装置などによる機能が使用できない。また、CAN(Controller Area Network)やLIN(Local Interconnect Network)の分散制御方式ネットワークが近年大半の市販車両の制御に用いられており、この場合、既存のステアリングホイールを取り外すと、ECU(Electric Control Unit)がエラーを認識し、走行できないこともある。
【0004】
そこで、特許文献3に示されるように、上記ステアリングホイール形状のセンサを取付金具などで既存のステアリングホイール上に取り付け、操舵力の計測を行うことがある。
【0005】
また、特許文献4には、既存のステアリングホイールのリム上に一対の半割れパイプ状のセンサを左右対称に被せる被せ型センサが示されている。この被せ型センサは、ステアリングホイールのリムを内部に挿通させて、該ステアリングホイールのリムに着脱可能に締着される内部スリーブと、内部スリーブの外周に着脱可能として設けられ、操作者によって把持される外部スリーブと、これら内部スリーブと外部スリーブとの間に配設され、ステアリングホイールリムに沿う方向についての内部スリーブと外部スリーブとの相対的応力によって起ひずみ部にひずみ変形を生ずる起ひずみ体と、起ひずみ体の起ひずみ部のひずみ変形を検出すべく起ひずみ部に添着されたひずみゲージとを具備するセンサ本体を備えている。そして、内部スリーブ及び外部スリーブは、それぞれステアリングホイールの半径方向についての外側の外側半筒部と内側の内側半筒部とに2分割形成され、相互に接合されている。
【特許文献1】特開2002−350251号公報
【特許文献2】特開2008−164421号公報(段落0003、図9)
【特許文献3】特開2008−164421号公報(段落0003)
【特許文献4】特開2008−164421号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、上記のステアリングホイール形状のセンサは、ホイール部のスポーク部分に操舵力検出器が内蔵されている。また、操舵角も計測できるセンサの場合、スポーク部分には角度検出器も内蔵されている。そのため、既存のステアリングホイールに内蔵された各種機能、例えば、ドライバの安全確保につながる重要な装備であるエアバッグが使用できないという問題点があった。
【0007】
また、上記の被せ型センサは、構造上、既存のステアリングホイールの形状によってセンサの固定場所が限定される、センサ本体の握り部が通常より太くなる、並びに、原理上及び構造上、計測時にはセンサ本体をドライバが常に把持する必要があるため、ドライバは計測時に通常時と異なる操舵が要求され、操舵力を精度良く計測できないという問題があった。さらに、ドライバがセンサ本体を把持したまま、ステアリングホイールを操舵して90度程度以上回転させることは非常に困難であるという問題があった。また、仮に可能であったとしても、ステアリングホイールを1回転以上回転させた場合には、ステアリングコラム付近でセンサ本体に接続されたケーブルが絡まって操舵機能が阻害され、ドライバの安全が脅かされるという問題があった。
【0008】
本発明は、以上の点に鑑み、既存のステアリングホイールに内蔵された各種機能が使用でき、且つ、通常時に近い操舵をドライバが行うことができ、操舵力を精度良く計測することが可能なステアリング操舵力センサを提供することをその課題としている。
【課題を解決するための手段】
【0009】
上記課題を解決するために、本発明のステアリング操舵力センサは、ステアリングホイール上に取り付けられ、該ステアリングホイールに機械的に連結されたステアリングシャフトに作用する操舵力を計測するためのステアリング操舵力センサであって、中空リング形状のホイール部と、該ホイール部の中心を中心とする円周上に等間隔に配置され、該ホイール部の下方に固定された複数の荷重計からなる操舵力計測部と、前記ホイール部の中心が前記ステアリングシャフトの回転軸心を通るように、操舵力計測部を前記ステアリングホイールへ取り付けるための取付部とを備え、前記荷重計は、前記ステアリングシャフトの回転軸心方向の応力によって生ずるひずみ変形が反対方向に相等しくなるように形成された一対の起ひずみ部を有する起ひずみ体と、前記起ひずみ部に生ずるひずみ変形量をそれぞれ検出するよう当該起ひずみ部に貼着されたひずみゲージとを具備することを特徴とする。
【0010】
本発明のステアリング操舵力センサによれば、ホイール部が中空リング形状であり、操舵力計測部の荷重計はホイール部の下方に固定されているので、ステアリング操舵力センサを取り付けたステアリングホイールに内蔵された各種機能、特に、エアバッグを使用することが可能となり、ドライバの安全を確保することができる。また、ホイール部が中空リング形状であるので、握り部や外径などがステアリングホイールのリムと同様の形状とすることが可能であり、ドライバはステアリングホイールによる操舵に近い運転姿勢でホイール部による操舵を行うことができ、操舵力の計測精度が優れたものとなる。また、荷重計は、ステアリングシャフトの回転軸心方向の応力によって生ずるひずみ変形が反対方向に相等しくなるように形成された一対の起ひずみ部を有する起ひずみ体と、起ひずみ部に生ずるひずみ変形量をそれぞれ検出するよう起ひずみ部に貼着されたひずみゲージとを具備する。そのため、荷重計はステアリングシャフトの回転軸心方向の応力によって生じるひずみ変形に影響されることなく、操舵力を計測することができる。
【0011】
また、本発明のステアリング操舵力センサにおいて、前記取付部は、前記荷重計が上面に固定される中空リング形状の固定板と、該固定板に前記ステアリングホイールを取り付けるための取付具とから構成されることが望ましい。これによれば、ホイール部と固定板との間に上下方向に荷重計を挟み込み固定することが可能であるので、荷重計を強固に固定することができ、操舵力の計測精度が優れたものとなる。
【0012】
また、本発明のステアリング操舵力センサにおいて、前記ステアリングホイールの操舵角を検出する操舵角センサを備えることが望ましい。これによれば、操舵力と共に操舵角を計測することが可能になる。
【0013】
また、本発明のステアリング操舵力センサにおいて、前記荷重計が検出したひずみ変形量に応じた電気信号を外部に無線送信する送信機を備えることが望ましい。これによれば、荷重計から外部に操舵力データを出力するためのケーブルが存在しないため、ドライバはホイール部を通常時と同様に1回転以上自在に回転することができ、操舵力の計測精度が優れたものとなる。
【発明を実施するための最良の形態】
【0014】
本発明の実施形態に係るステアリング操舵力センサ10を用いたステアリング操舵力計測システム100を図面を参照して説明する。
【0015】
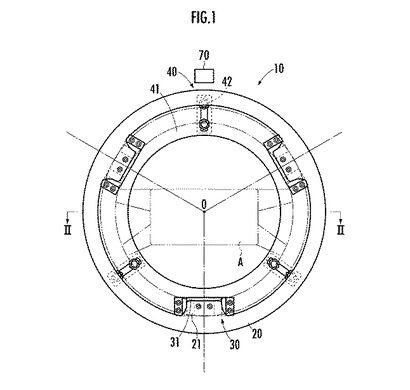
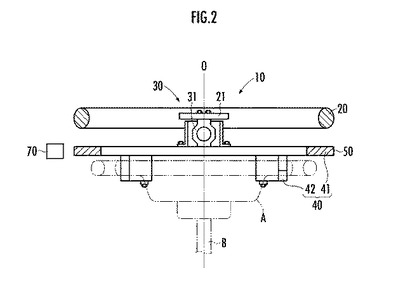
ステアリング操舵力センサ10は、図1及び図2に示すように、市販車等の車両の既存のステアリングホイールA上に取り付けられ、ステアリングホイールAに機械的に連結されているステアリングシャフトBに作用する操舵力(回転トルク)を計測するためのものである。ドライバの操舵力によりステアリングホイールAが回転し、この操舵力によりステアリングシャフトBの軸が回転して操向車輪(図示省略)を転舵させる。
【0016】
ステアリング操舵力センサ10は、ドライバ(図示省略)が把持して操舵する中空リング状のホイール部20と、操舵力を計測するための操舵力計測部30と、操舵力計測部30をステアリングホイールAに取り付けるための取付部40を備えている。また、ステアリング操舵力センサ10は、操舵角センサの一部を構成する操舵角スケール50も備えており、ステアリングホイールAの操舵角、ひいてはステアリングシャフトBの回転角も計測することが可能となっている。
【0017】
ホイール部20は、中空リング形状(ドーナツ形状)であり、操舵力計測部30をホイール部20の下方に、ホイール部20に対して強固に固定するための台座21を備えている。ホイール部20は、握り部等の形状や外径が一般的なステアリングホイールのリムに準じて構成されている。これにより、既存のステアリングホイールAによる操舵と同様の操舵を、ホイール部20を把持するドライバが行うことができる。ただし、ホイール部20は、ステアリングホイールAに内蔵されたエアバッグが作動した場合にその機能を阻害しないように、一般的なステアリングホイールが有するスポークや中央に位置するハブに相当する部分を有していない。ホイール部20の材質は、例えば、アルミニウム等の金属、又は構造材に用いられる各種樹脂である。また、ホイール部20は、後述する送信機22(図5)や電源電池(図示省略)を内蔵している。
【0018】
操舵力計測部30は、力(トルク)を電気信号に変換して出力する複数のひずみゲージ式の荷重計(ロードセル、荷重変換器)31から構成されている。荷重計31は、ホイール部20の軸心Oを中心とする円周上に複数個、ここでは3個、等間隔に配置されている。荷重計31は、ホイール部20を操舵するドライバの邪魔とならないように、ホイール部20の下方に固定されている。荷重計31は、ホイール部20の台座21にボルト32を用いて十分な剛性を有するように固定されている。
【0019】
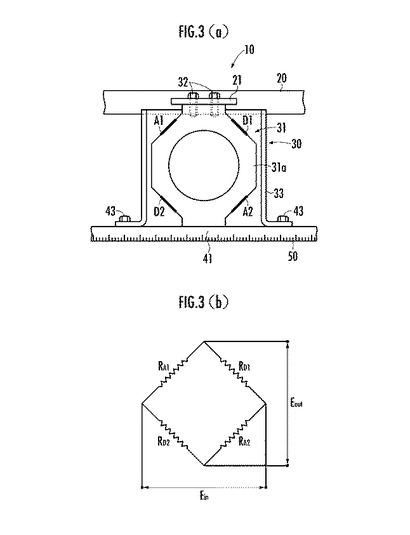
ドライバがホイール部20を操舵するとき、荷重計31には、操舵力の他に、ステアリングシャフトBの回転軸方向の力など多くの力が作用する。そこで、荷重計31は、図3(a)に示すように、操舵中に発生し得る操舵力以外の力がキャンセル(相殺)可能な形状に形成された起ひずみ体31aを有している。具体的には、荷重計31は、ステアリングシャフトBの回転軸心方向(図中上下方向)の応力によって生ずるひずみ変形が反対方向に相等しくなるように形成された一対の起ひずみ部を有する起ひずみ体31aと、各起ひずみ部に生ずるひずみ変形量をそれぞれ検出するよう起ひずみ部に添着されたひずみゲージA1,D1,A2,D2とを具備している。
【0020】
荷重計31は、4ゲージ法(アクティブダミー法)により、ステアリングシャフトBの回転軸心に直交する方向(図面左右方向)である剪断方向の応力を電気信号に変換して取り出す。起ひずみ体31aは、矩形板の四隅をステアリングシャフトBの回転軸心方向に対して45度又は135度切り欠いた傾斜面を有する外形略正八角形板であり、その中央に円形の孔が形成されて、傾斜面を外面に有する部分である起ひずみ部が薄肉となりひずみが生じ易くなっている。起ひずみ体31aの上部各傾斜面にアクティブひずみゲージA1とダミーひずみゲージD1をそれぞれ回転軸対称に貼付し、起ひずみ体31aの下部各傾斜面にアクティブひずみゲージA2とダミーひずみゲージD2をそれぞれ回転軸対称に貼着している。そして、図3(b)に示すように、ホイートストーンブリッジ回路に各ひずみゲージA1,A2,D1,D2を組み込み、隣り合うアクティブひずみゲージとダミーひずみゲージ(A1とD1、A2とD2)がそれぞれ出力を相殺するよう構成することによって、ステアリングシャフトBの回転軸方向の応力の影響を除去している。即ち、ステアリングシャフトBの回転軸方向の応力(圧縮応力又は引張応力)を受けた場合、隣り合うひずみゲージを貼着した起ひずみ部は同じ変形をするため、隣り合うひずみゲージの抵抗変化量は同じとなり、ホイートストーンブリッジ回路から出力されない。他方、剪断応力を受けた場合、隣り合うひずみゲージを貼着した起ひずみ部は逆の変形をするため、隣り合うひずみゲージの抵抗変化量の極性が逆となり、ホイートストーンブリッジ回路からはひずみ変形量に応じた電気信号が出力される。
【0021】
荷重計31のホイートストーンブリッジ回路から出力された電気信号は、ホイール部20内に配線されたケーブル(図示省略)を介して、ホイール部20に内蔵された無線通信用の送信機22(図5参照)によって無線送信される。このように、テレメータ方式(遠隔測定データ伝送方式)を採用しており、ステアリング操舵力センサ10外部の機器と荷重計31とを接続するケーブルが存在しない。そのため、ホイール部20を1回転以上させてもケーブルが絡まることなく、ドライバは通常の操舵と同様、安全に操舵を行うことができる。
【0022】
なお、ドライバがホイール部20を把持して操舵する際に、荷重計31に直接手が触れ、操舵力の計測が阻害されないよう、荷重計31は保護カバー33によって覆われている。
【0023】
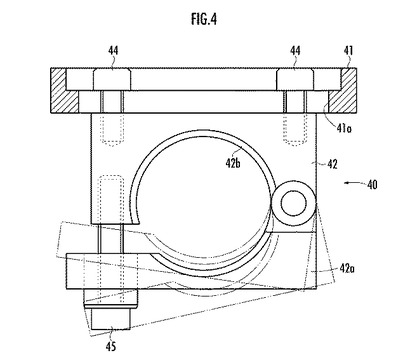
取付部40は、操舵力計測部30が固定される中空リング形状の固定板41と、ステアリング操舵力センサ10をステアリングホイールAに取り付けるための取付金具42とから構成されている。固定板41は、既存のステアリングホイールAに内蔵されたエアバッグが作動した場合にその機能を阻害しないように、ホイール部20と同様に中空リング形状に形成されている。固定板41は、金属板等からなり、十分な剛性を有しており、その上面にボルト43を用いて荷重計31が固定されている。このように、荷重計31は、上下方向にホイール部20と固定板41との間に挟まれて、強固に固定されている。
【0024】
取付金具42は、既存のステアリングホイールAのリムの外径に合わせて、ステアリング操舵力センサ10を取り付けるための調整機構を備えており、リムの外径や断面略円形の把持部の径が異なる様々な既存のステアリングホイールAにステアリング操舵力センサ10を取り付けることが可能となっている。取付金具42は、固定板41の中心を中心とする所定の円周上に複数、ここでは3個、等間隔に設けられており、既存のステアリングホイールAに固定板41を堅牢に固定する。これにより、精度の高い操舵トルク及び操舵角の計測が可能となる。
【0025】
具体的には、図4に示すように、固定板41には所定の円周上に等間隔に半径方向に伸びる3つの長孔41aが形成されており、この長孔41aに対して取付金具42をステアリングホイールAのリムの外径に応じて、半径方向に移動させて適宜な位置でボルト44によって固定することが可能なように構成されている。固定板41の中心がステアリングホイールAの回転軸心、ひいてはステアリングシャフトBの回転軸心と一致するように固定される。そのため、取付金具42が固定板41に半径方向に中心から同じだけ隔てて固定されるように、取付金具42に固定位置を示す目盛り等を付しておくことが好ましい。また、取付金具42は上下に回動可能な回動部42aを有しており、この回動部42aと取付金具42本体の間にクッション材42bを介してステアリングホイールAのリムを挟み込み、ボルト45によって固定している。
【0026】
操舵角スケール50は、固定板41に設けられている。本実施形態では、操舵角スケール50は、操舵角読取器70(図4参照)である光スケールセンサに対応したテープ状のフレキシブルな貼付型スケールであり、固定板41の側周面にビス等を用いて強固に固定されている。なお、既存のステアリングホイールAの操舵角とホイール部10の操舵角は、完全に一致することが望ましいが、ステアリング操舵力センサ10の取り付け時に操舵角スケール50によって操舵角の初期値を把握することにより、正確な操舵角を計測することができるため、必ずしも操舵角を一致させて取り付ける必要はない。
【0027】
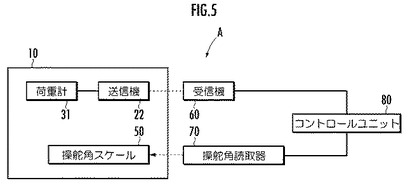
ステアリング操舵力計測システム100は、図5に示すように、さらに、送信機22が送信した電気信号を受信する受信機60、操舵角スケール50を用いてステアリングホイールAの操舵角を計測する操舵角読取器70、及びコントロールユニット80を備えている。 操舵角読取器70は、操舵角スケール50に光を照射して、反射された操舵角スケール50の像をCCDラインセンサで読み取り、分解する光スケールセンサである。操舵角読取器70は、送信機を内蔵し無線通信により計測データを送信してもよいが、その存在によって操舵性が阻害されることがないため、本実施形態では、車両の室内に固定されている。
【0028】
操舵角読取器70の取付脚は、図示しないが、ゴム製の吸盤を有する基部と、基部上部に備わるロッドと、操舵角読取器70を固定するプレートとから構成される。室内内装品に多用される金属、ガラス、ABS(Acrylonitrile Butadiene Styrene)樹脂等に強固に固定可能なゴム製の吸盤を基部に有する取付脚を備えるため、操舵角読取器70は、ボルト止め等によって室内に固定する必要がない。そのため、操舵角読取器70は、その取付場所を選ばず、取付作業は非常に容易であると共に、取付時に室内内装等を損なわない。
【0029】
コントロールユニット80は、I/Fユニット(図示省略)を介して受信機60に接続されており、受信機60を制御して、受信機60から受信した電気信号に応じて操舵力に係るデータを収集する。また、コントロールユニット80は、I/Fユニット(図示省略)を介して操舵角読取器70に接続されており、操舵角読取器70を制御して、操舵角読取器70から受信した電気信号に応じて操舵角に係るデータを収集する。なお、コントロールユニット80は、操舵力、操舵角を画面上に表示する、又は記録紙に印字する出力表示装置や、パーソナルコンピュータ等に接続されていてもよい。
【0030】
ところで、ステアリング操舵力センサ10を既存のステアリングホイールAに取り付けことによって、ドライバがホイール部10を把持する姿勢が非計測時(通常時)と大きく異なると、操舵力の計測精度が低下する。そこで、ホイール部20や固定板41の材質に高剛性の材料を使用し、これらの厚みを薄くすることによって、ステアリング操舵力センサ10の全高を低くし、ステアリング操舵力センサ10を既存のステアリングホイールAに取り付けたときのドライバ側へのオフセット量を抑えることができる。ただし、ホイール部20や固定板41の材質にアルミニウム等の一般的な構造材料を使用した場合であっても、オフセット量は60mm程度に抑えることができる。そして、一般的な市販車は身長150mmから190mmのドライバを想定して設計されており、ほぼ全ての市販車はステアリングホイールやシートの調整機構を具備している。よって、この調整機構を利用して、ステアリング操舵力センサ10の取り付けによる60mm程度のオフセット量は十分に吸収可能であり、ドライバは非計測時に近い運転姿勢をとることができ、運転姿勢の大きな相違により計測精度が低下することはない。
【0031】
また、ステアリング操舵力センサ10自体が著しく重い場合、既存のステアリングホイールAの重心位置の変化や慣性モーメントに及ぼす影響が懸念される。そこで、ステアリング操舵力センサ10の重心が、ステアリングホイールAの重心を通る軸心上に位置させることが好ましい。ステアリング操舵力センサ10の重心は、例えば、ホイール部10に内蔵される送信機や荷重計の位置を変更することで調整することができる。ステアリング操舵力センサ10の慣性モーメントは、例えばホイール部10本体の材質をカーボン等の高剛性軽量材料とすることで大幅に軽減することができる。
【0032】
以上のように、ステアリング操舵力角センサ10は、市販車等の計測対象車のステアリングホイールAに内蔵されたドライバの保護装置であるエアバッグの作動など各種機能を阻害することなく、既存のステアリングホイールA上に取り付けることができ、その取り付けも容易である。
【0033】
また、ドライバが操舵するホイール部10は、握り部や外径などが既存のステアリングホイール10のリムと同様の形状をしているので、ドライバはステアリングホイールAを操舵するときと近い運転姿勢でホイール部10を把持して操舵を行うことが可能であるため、操舵力の計測精度が優れたものとなる。
【0034】
また、荷重計31が計測した操舵力データを送信機22によって無線送信するテレメータ方式を採用しており、操舵角読取器70は非接触型の光スケールセンサであり、接触抵抗による摩擦力の干渉を受けないため、操舵力及び操舵角の計測精度が優れたものとなる。さらに、荷重計31から外部に操舵力データを出力するためのケーブルが存在しないため、ドライバはホイール部10を通常時と同様に1回転以上自在に回転することができ、操舵力の計測精度が優れたものとなる。
【0035】
また、十分な剛性を有するホイール部10及び固定板41に上下方向を挟まれて、荷重計30が強固に固定されると共に、ホイール部10及び固定板41の中心がステアリングシャフトBの回転軸心を通っているので、ホイール部10の回転がステアリングホイールAの回転と一致するため、操舵力の計測精度が優れたものとなる。さらに、操舵角スケール50は固定板41の側周面に強固に固定されているので、操舵角の計測精度が優れたものとなる。
【0036】
なお、以上説明した実施形態では、光スケールセンサである操舵角読取器70によって、固定板41の側周面に固定された操舵角スケール50を読み取り、操舵角を計測する場合について説明した。しかしながら、操舵角を計測する方法は、これに限定されるものではなく、一般的に市販されている各種の角度検出器を用いるものであってもよい。ただし、ステアリングホイールAに内蔵されたエアバッグ等の作動を阻害しないように、ステアリングホイールAのスポークやハブの上方に位置する部材を必要としない角度検出器に限定される。例えば、操舵角読取器70として電気式、光学式、磁気式等の非接触型のロータリエンコーダを用い、固定板41の上面又は下面にリング状の固定型スケール(円スケール)をビス等を用いて強固に固定してもよい。このように、非接触型のロータリエンコーダを用いれば、接触抵抗による摩擦力の干渉を受けないため、操舵力及び操舵角の計測精度が優れている。また、接触型のロータリエンコーダを用いて、操舵角を計測してもよい。この場合、ロータリエンコーダ自体が十分な剛性を有し、かつステアリングホイールAに取り付けるための追加工が可能なものであれば、ロータリエンコーダ自体を取付部とすることもできる。
【図面の簡単な説明】
【0037】
【図1】本発明の実施形態に係るステアリング操舵力センサを示す正面図。
【図2】図1のII−II線における切断断面図。
【図3】荷重計を示し、(a)は側面図、(b)はホイートストーンブリッジ回路を示す説明図。
【図4】取付部を示す側面図。
【図5】ステアリング操舵力計測システムの構成を示す説明図。
【符号の説明】
【0038】
10…ステアリング操舵力センサ、20…ホイール部、22…送信機、30…操舵力計測部、31…荷重計、31a…起ひずみ体、40…取付部、41…固定板、42…取付金具、50…操舵角スケール(操舵角センサ)、60…受信機、70…操舵角読取器、80…コントロールユニット、100…ステアリング操舵力計測システム、A…ステアリングホイール、B…ステアリングシャフト、A1,D1,A2,D2…ひずみゲージ。
【技術分野】
【0001】
本発明は、車両のステアリングホイールに作用する操舵力を計測するステアリング操舵力センサに関する。
【背景技術】
【0002】
自動車等の車両のステアリングホイール(ステアリングハンドル)に作用する操舵力を計測するセンサは、一般に、特許文献1に示されるように、ステアリングコラムに検出部が予め組み込まれている。このセンサは、ステアリングホイールに作用する操舵力によって、該ステアリングホイールに機械的に連結されたステアリングシャフトに生じたねじれ変形量を電気信号として検出している。このようなセンサを既存車両に組み込む場合、ステアリングコラムを分解して、改造する必要がある。しかし、このような改造は専門の知識、設備、時間が要求されるため、非常に困難であり、現実的ではない。
【0003】
一方、特許文献2に示されるように、ステアリングシャフトに取り付けるステアリングホイール形状のセンサがある。このセンサは、操舵力検出部単体又は角度検出器を組み合わせて有し、計測対象車に装備された既存のステアリングホイールを取り外して交換し、計測を行う。このセンサは、ホイール部とその裏側において計測部が固定されるステアリングシャフトとの間に操舵時のホイール部の回転操舵により生じるねじれ変形量を、ひずみゲージ等を用いて検出することによって、操舵力を直接的に計測する。ひずみゲージ等からなる操舵力計測器は、ステアリングシャフトと同一中心軸上に位置するホイール部のスポーク部分に内蔵されている。しかし、既存のステアリングホイールを取り外すため、該ステアリングホイールに内蔵された各種装置、例えばエアバッグや方向指示装置などによる機能が使用できない。また、CAN(Controller Area Network)やLIN(Local Interconnect Network)の分散制御方式ネットワークが近年大半の市販車両の制御に用いられており、この場合、既存のステアリングホイールを取り外すと、ECU(Electric Control Unit)がエラーを認識し、走行できないこともある。
【0004】
そこで、特許文献3に示されるように、上記ステアリングホイール形状のセンサを取付金具などで既存のステアリングホイール上に取り付け、操舵力の計測を行うことがある。
【0005】
また、特許文献4には、既存のステアリングホイールのリム上に一対の半割れパイプ状のセンサを左右対称に被せる被せ型センサが示されている。この被せ型センサは、ステアリングホイールのリムを内部に挿通させて、該ステアリングホイールのリムに着脱可能に締着される内部スリーブと、内部スリーブの外周に着脱可能として設けられ、操作者によって把持される外部スリーブと、これら内部スリーブと外部スリーブとの間に配設され、ステアリングホイールリムに沿う方向についての内部スリーブと外部スリーブとの相対的応力によって起ひずみ部にひずみ変形を生ずる起ひずみ体と、起ひずみ体の起ひずみ部のひずみ変形を検出すべく起ひずみ部に添着されたひずみゲージとを具備するセンサ本体を備えている。そして、内部スリーブ及び外部スリーブは、それぞれステアリングホイールの半径方向についての外側の外側半筒部と内側の内側半筒部とに2分割形成され、相互に接合されている。
【特許文献1】特開2002−350251号公報
【特許文献2】特開2008−164421号公報(段落0003、図9)
【特許文献3】特開2008−164421号公報(段落0003)
【特許文献4】特開2008−164421号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、上記のステアリングホイール形状のセンサは、ホイール部のスポーク部分に操舵力検出器が内蔵されている。また、操舵角も計測できるセンサの場合、スポーク部分には角度検出器も内蔵されている。そのため、既存のステアリングホイールに内蔵された各種機能、例えば、ドライバの安全確保につながる重要な装備であるエアバッグが使用できないという問題点があった。
【0007】
また、上記の被せ型センサは、構造上、既存のステアリングホイールの形状によってセンサの固定場所が限定される、センサ本体の握り部が通常より太くなる、並びに、原理上及び構造上、計測時にはセンサ本体をドライバが常に把持する必要があるため、ドライバは計測時に通常時と異なる操舵が要求され、操舵力を精度良く計測できないという問題があった。さらに、ドライバがセンサ本体を把持したまま、ステアリングホイールを操舵して90度程度以上回転させることは非常に困難であるという問題があった。また、仮に可能であったとしても、ステアリングホイールを1回転以上回転させた場合には、ステアリングコラム付近でセンサ本体に接続されたケーブルが絡まって操舵機能が阻害され、ドライバの安全が脅かされるという問題があった。
【0008】
本発明は、以上の点に鑑み、既存のステアリングホイールに内蔵された各種機能が使用でき、且つ、通常時に近い操舵をドライバが行うことができ、操舵力を精度良く計測することが可能なステアリング操舵力センサを提供することをその課題としている。
【課題を解決するための手段】
【0009】
上記課題を解決するために、本発明のステアリング操舵力センサは、ステアリングホイール上に取り付けられ、該ステアリングホイールに機械的に連結されたステアリングシャフトに作用する操舵力を計測するためのステアリング操舵力センサであって、中空リング形状のホイール部と、該ホイール部の中心を中心とする円周上に等間隔に配置され、該ホイール部の下方に固定された複数の荷重計からなる操舵力計測部と、前記ホイール部の中心が前記ステアリングシャフトの回転軸心を通るように、操舵力計測部を前記ステアリングホイールへ取り付けるための取付部とを備え、前記荷重計は、前記ステアリングシャフトの回転軸心方向の応力によって生ずるひずみ変形が反対方向に相等しくなるように形成された一対の起ひずみ部を有する起ひずみ体と、前記起ひずみ部に生ずるひずみ変形量をそれぞれ検出するよう当該起ひずみ部に貼着されたひずみゲージとを具備することを特徴とする。
【0010】
本発明のステアリング操舵力センサによれば、ホイール部が中空リング形状であり、操舵力計測部の荷重計はホイール部の下方に固定されているので、ステアリング操舵力センサを取り付けたステアリングホイールに内蔵された各種機能、特に、エアバッグを使用することが可能となり、ドライバの安全を確保することができる。また、ホイール部が中空リング形状であるので、握り部や外径などがステアリングホイールのリムと同様の形状とすることが可能であり、ドライバはステアリングホイールによる操舵に近い運転姿勢でホイール部による操舵を行うことができ、操舵力の計測精度が優れたものとなる。また、荷重計は、ステアリングシャフトの回転軸心方向の応力によって生ずるひずみ変形が反対方向に相等しくなるように形成された一対の起ひずみ部を有する起ひずみ体と、起ひずみ部に生ずるひずみ変形量をそれぞれ検出するよう起ひずみ部に貼着されたひずみゲージとを具備する。そのため、荷重計はステアリングシャフトの回転軸心方向の応力によって生じるひずみ変形に影響されることなく、操舵力を計測することができる。
【0011】
また、本発明のステアリング操舵力センサにおいて、前記取付部は、前記荷重計が上面に固定される中空リング形状の固定板と、該固定板に前記ステアリングホイールを取り付けるための取付具とから構成されることが望ましい。これによれば、ホイール部と固定板との間に上下方向に荷重計を挟み込み固定することが可能であるので、荷重計を強固に固定することができ、操舵力の計測精度が優れたものとなる。
【0012】
また、本発明のステアリング操舵力センサにおいて、前記ステアリングホイールの操舵角を検出する操舵角センサを備えることが望ましい。これによれば、操舵力と共に操舵角を計測することが可能になる。
【0013】
また、本発明のステアリング操舵力センサにおいて、前記荷重計が検出したひずみ変形量に応じた電気信号を外部に無線送信する送信機を備えることが望ましい。これによれば、荷重計から外部に操舵力データを出力するためのケーブルが存在しないため、ドライバはホイール部を通常時と同様に1回転以上自在に回転することができ、操舵力の計測精度が優れたものとなる。
【発明を実施するための最良の形態】
【0014】
本発明の実施形態に係るステアリング操舵力センサ10を用いたステアリング操舵力計測システム100を図面を参照して説明する。
【0015】
ステアリング操舵力センサ10は、図1及び図2に示すように、市販車等の車両の既存のステアリングホイールA上に取り付けられ、ステアリングホイールAに機械的に連結されているステアリングシャフトBに作用する操舵力(回転トルク)を計測するためのものである。ドライバの操舵力によりステアリングホイールAが回転し、この操舵力によりステアリングシャフトBの軸が回転して操向車輪(図示省略)を転舵させる。
【0016】
ステアリング操舵力センサ10は、ドライバ(図示省略)が把持して操舵する中空リング状のホイール部20と、操舵力を計測するための操舵力計測部30と、操舵力計測部30をステアリングホイールAに取り付けるための取付部40を備えている。また、ステアリング操舵力センサ10は、操舵角センサの一部を構成する操舵角スケール50も備えており、ステアリングホイールAの操舵角、ひいてはステアリングシャフトBの回転角も計測することが可能となっている。
【0017】
ホイール部20は、中空リング形状(ドーナツ形状)であり、操舵力計測部30をホイール部20の下方に、ホイール部20に対して強固に固定するための台座21を備えている。ホイール部20は、握り部等の形状や外径が一般的なステアリングホイールのリムに準じて構成されている。これにより、既存のステアリングホイールAによる操舵と同様の操舵を、ホイール部20を把持するドライバが行うことができる。ただし、ホイール部20は、ステアリングホイールAに内蔵されたエアバッグが作動した場合にその機能を阻害しないように、一般的なステアリングホイールが有するスポークや中央に位置するハブに相当する部分を有していない。ホイール部20の材質は、例えば、アルミニウム等の金属、又は構造材に用いられる各種樹脂である。また、ホイール部20は、後述する送信機22(図5)や電源電池(図示省略)を内蔵している。
【0018】
操舵力計測部30は、力(トルク)を電気信号に変換して出力する複数のひずみゲージ式の荷重計(ロードセル、荷重変換器)31から構成されている。荷重計31は、ホイール部20の軸心Oを中心とする円周上に複数個、ここでは3個、等間隔に配置されている。荷重計31は、ホイール部20を操舵するドライバの邪魔とならないように、ホイール部20の下方に固定されている。荷重計31は、ホイール部20の台座21にボルト32を用いて十分な剛性を有するように固定されている。
【0019】
ドライバがホイール部20を操舵するとき、荷重計31には、操舵力の他に、ステアリングシャフトBの回転軸方向の力など多くの力が作用する。そこで、荷重計31は、図3(a)に示すように、操舵中に発生し得る操舵力以外の力がキャンセル(相殺)可能な形状に形成された起ひずみ体31aを有している。具体的には、荷重計31は、ステアリングシャフトBの回転軸心方向(図中上下方向)の応力によって生ずるひずみ変形が反対方向に相等しくなるように形成された一対の起ひずみ部を有する起ひずみ体31aと、各起ひずみ部に生ずるひずみ変形量をそれぞれ検出するよう起ひずみ部に添着されたひずみゲージA1,D1,A2,D2とを具備している。
【0020】
荷重計31は、4ゲージ法(アクティブダミー法)により、ステアリングシャフトBの回転軸心に直交する方向(図面左右方向)である剪断方向の応力を電気信号に変換して取り出す。起ひずみ体31aは、矩形板の四隅をステアリングシャフトBの回転軸心方向に対して45度又は135度切り欠いた傾斜面を有する外形略正八角形板であり、その中央に円形の孔が形成されて、傾斜面を外面に有する部分である起ひずみ部が薄肉となりひずみが生じ易くなっている。起ひずみ体31aの上部各傾斜面にアクティブひずみゲージA1とダミーひずみゲージD1をそれぞれ回転軸対称に貼付し、起ひずみ体31aの下部各傾斜面にアクティブひずみゲージA2とダミーひずみゲージD2をそれぞれ回転軸対称に貼着している。そして、図3(b)に示すように、ホイートストーンブリッジ回路に各ひずみゲージA1,A2,D1,D2を組み込み、隣り合うアクティブひずみゲージとダミーひずみゲージ(A1とD1、A2とD2)がそれぞれ出力を相殺するよう構成することによって、ステアリングシャフトBの回転軸方向の応力の影響を除去している。即ち、ステアリングシャフトBの回転軸方向の応力(圧縮応力又は引張応力)を受けた場合、隣り合うひずみゲージを貼着した起ひずみ部は同じ変形をするため、隣り合うひずみゲージの抵抗変化量は同じとなり、ホイートストーンブリッジ回路から出力されない。他方、剪断応力を受けた場合、隣り合うひずみゲージを貼着した起ひずみ部は逆の変形をするため、隣り合うひずみゲージの抵抗変化量の極性が逆となり、ホイートストーンブリッジ回路からはひずみ変形量に応じた電気信号が出力される。
【0021】
荷重計31のホイートストーンブリッジ回路から出力された電気信号は、ホイール部20内に配線されたケーブル(図示省略)を介して、ホイール部20に内蔵された無線通信用の送信機22(図5参照)によって無線送信される。このように、テレメータ方式(遠隔測定データ伝送方式)を採用しており、ステアリング操舵力センサ10外部の機器と荷重計31とを接続するケーブルが存在しない。そのため、ホイール部20を1回転以上させてもケーブルが絡まることなく、ドライバは通常の操舵と同様、安全に操舵を行うことができる。
【0022】
なお、ドライバがホイール部20を把持して操舵する際に、荷重計31に直接手が触れ、操舵力の計測が阻害されないよう、荷重計31は保護カバー33によって覆われている。
【0023】
取付部40は、操舵力計測部30が固定される中空リング形状の固定板41と、ステアリング操舵力センサ10をステアリングホイールAに取り付けるための取付金具42とから構成されている。固定板41は、既存のステアリングホイールAに内蔵されたエアバッグが作動した場合にその機能を阻害しないように、ホイール部20と同様に中空リング形状に形成されている。固定板41は、金属板等からなり、十分な剛性を有しており、その上面にボルト43を用いて荷重計31が固定されている。このように、荷重計31は、上下方向にホイール部20と固定板41との間に挟まれて、強固に固定されている。
【0024】
取付金具42は、既存のステアリングホイールAのリムの外径に合わせて、ステアリング操舵力センサ10を取り付けるための調整機構を備えており、リムの外径や断面略円形の把持部の径が異なる様々な既存のステアリングホイールAにステアリング操舵力センサ10を取り付けることが可能となっている。取付金具42は、固定板41の中心を中心とする所定の円周上に複数、ここでは3個、等間隔に設けられており、既存のステアリングホイールAに固定板41を堅牢に固定する。これにより、精度の高い操舵トルク及び操舵角の計測が可能となる。
【0025】
具体的には、図4に示すように、固定板41には所定の円周上に等間隔に半径方向に伸びる3つの長孔41aが形成されており、この長孔41aに対して取付金具42をステアリングホイールAのリムの外径に応じて、半径方向に移動させて適宜な位置でボルト44によって固定することが可能なように構成されている。固定板41の中心がステアリングホイールAの回転軸心、ひいてはステアリングシャフトBの回転軸心と一致するように固定される。そのため、取付金具42が固定板41に半径方向に中心から同じだけ隔てて固定されるように、取付金具42に固定位置を示す目盛り等を付しておくことが好ましい。また、取付金具42は上下に回動可能な回動部42aを有しており、この回動部42aと取付金具42本体の間にクッション材42bを介してステアリングホイールAのリムを挟み込み、ボルト45によって固定している。
【0026】
操舵角スケール50は、固定板41に設けられている。本実施形態では、操舵角スケール50は、操舵角読取器70(図4参照)である光スケールセンサに対応したテープ状のフレキシブルな貼付型スケールであり、固定板41の側周面にビス等を用いて強固に固定されている。なお、既存のステアリングホイールAの操舵角とホイール部10の操舵角は、完全に一致することが望ましいが、ステアリング操舵力センサ10の取り付け時に操舵角スケール50によって操舵角の初期値を把握することにより、正確な操舵角を計測することができるため、必ずしも操舵角を一致させて取り付ける必要はない。
【0027】
ステアリング操舵力計測システム100は、図5に示すように、さらに、送信機22が送信した電気信号を受信する受信機60、操舵角スケール50を用いてステアリングホイールAの操舵角を計測する操舵角読取器70、及びコントロールユニット80を備えている。 操舵角読取器70は、操舵角スケール50に光を照射して、反射された操舵角スケール50の像をCCDラインセンサで読み取り、分解する光スケールセンサである。操舵角読取器70は、送信機を内蔵し無線通信により計測データを送信してもよいが、その存在によって操舵性が阻害されることがないため、本実施形態では、車両の室内に固定されている。
【0028】
操舵角読取器70の取付脚は、図示しないが、ゴム製の吸盤を有する基部と、基部上部に備わるロッドと、操舵角読取器70を固定するプレートとから構成される。室内内装品に多用される金属、ガラス、ABS(Acrylonitrile Butadiene Styrene)樹脂等に強固に固定可能なゴム製の吸盤を基部に有する取付脚を備えるため、操舵角読取器70は、ボルト止め等によって室内に固定する必要がない。そのため、操舵角読取器70は、その取付場所を選ばず、取付作業は非常に容易であると共に、取付時に室内内装等を損なわない。
【0029】
コントロールユニット80は、I/Fユニット(図示省略)を介して受信機60に接続されており、受信機60を制御して、受信機60から受信した電気信号に応じて操舵力に係るデータを収集する。また、コントロールユニット80は、I/Fユニット(図示省略)を介して操舵角読取器70に接続されており、操舵角読取器70を制御して、操舵角読取器70から受信した電気信号に応じて操舵角に係るデータを収集する。なお、コントロールユニット80は、操舵力、操舵角を画面上に表示する、又は記録紙に印字する出力表示装置や、パーソナルコンピュータ等に接続されていてもよい。
【0030】
ところで、ステアリング操舵力センサ10を既存のステアリングホイールAに取り付けことによって、ドライバがホイール部10を把持する姿勢が非計測時(通常時)と大きく異なると、操舵力の計測精度が低下する。そこで、ホイール部20や固定板41の材質に高剛性の材料を使用し、これらの厚みを薄くすることによって、ステアリング操舵力センサ10の全高を低くし、ステアリング操舵力センサ10を既存のステアリングホイールAに取り付けたときのドライバ側へのオフセット量を抑えることができる。ただし、ホイール部20や固定板41の材質にアルミニウム等の一般的な構造材料を使用した場合であっても、オフセット量は60mm程度に抑えることができる。そして、一般的な市販車は身長150mmから190mmのドライバを想定して設計されており、ほぼ全ての市販車はステアリングホイールやシートの調整機構を具備している。よって、この調整機構を利用して、ステアリング操舵力センサ10の取り付けによる60mm程度のオフセット量は十分に吸収可能であり、ドライバは非計測時に近い運転姿勢をとることができ、運転姿勢の大きな相違により計測精度が低下することはない。
【0031】
また、ステアリング操舵力センサ10自体が著しく重い場合、既存のステアリングホイールAの重心位置の変化や慣性モーメントに及ぼす影響が懸念される。そこで、ステアリング操舵力センサ10の重心が、ステアリングホイールAの重心を通る軸心上に位置させることが好ましい。ステアリング操舵力センサ10の重心は、例えば、ホイール部10に内蔵される送信機や荷重計の位置を変更することで調整することができる。ステアリング操舵力センサ10の慣性モーメントは、例えばホイール部10本体の材質をカーボン等の高剛性軽量材料とすることで大幅に軽減することができる。
【0032】
以上のように、ステアリング操舵力角センサ10は、市販車等の計測対象車のステアリングホイールAに内蔵されたドライバの保護装置であるエアバッグの作動など各種機能を阻害することなく、既存のステアリングホイールA上に取り付けることができ、その取り付けも容易である。
【0033】
また、ドライバが操舵するホイール部10は、握り部や外径などが既存のステアリングホイール10のリムと同様の形状をしているので、ドライバはステアリングホイールAを操舵するときと近い運転姿勢でホイール部10を把持して操舵を行うことが可能であるため、操舵力の計測精度が優れたものとなる。
【0034】
また、荷重計31が計測した操舵力データを送信機22によって無線送信するテレメータ方式を採用しており、操舵角読取器70は非接触型の光スケールセンサであり、接触抵抗による摩擦力の干渉を受けないため、操舵力及び操舵角の計測精度が優れたものとなる。さらに、荷重計31から外部に操舵力データを出力するためのケーブルが存在しないため、ドライバはホイール部10を通常時と同様に1回転以上自在に回転することができ、操舵力の計測精度が優れたものとなる。
【0035】
また、十分な剛性を有するホイール部10及び固定板41に上下方向を挟まれて、荷重計30が強固に固定されると共に、ホイール部10及び固定板41の中心がステアリングシャフトBの回転軸心を通っているので、ホイール部10の回転がステアリングホイールAの回転と一致するため、操舵力の計測精度が優れたものとなる。さらに、操舵角スケール50は固定板41の側周面に強固に固定されているので、操舵角の計測精度が優れたものとなる。
【0036】
なお、以上説明した実施形態では、光スケールセンサである操舵角読取器70によって、固定板41の側周面に固定された操舵角スケール50を読み取り、操舵角を計測する場合について説明した。しかしながら、操舵角を計測する方法は、これに限定されるものではなく、一般的に市販されている各種の角度検出器を用いるものであってもよい。ただし、ステアリングホイールAに内蔵されたエアバッグ等の作動を阻害しないように、ステアリングホイールAのスポークやハブの上方に位置する部材を必要としない角度検出器に限定される。例えば、操舵角読取器70として電気式、光学式、磁気式等の非接触型のロータリエンコーダを用い、固定板41の上面又は下面にリング状の固定型スケール(円スケール)をビス等を用いて強固に固定してもよい。このように、非接触型のロータリエンコーダを用いれば、接触抵抗による摩擦力の干渉を受けないため、操舵力及び操舵角の計測精度が優れている。また、接触型のロータリエンコーダを用いて、操舵角を計測してもよい。この場合、ロータリエンコーダ自体が十分な剛性を有し、かつステアリングホイールAに取り付けるための追加工が可能なものであれば、ロータリエンコーダ自体を取付部とすることもできる。
【図面の簡単な説明】
【0037】
【図1】本発明の実施形態に係るステアリング操舵力センサを示す正面図。
【図2】図1のII−II線における切断断面図。
【図3】荷重計を示し、(a)は側面図、(b)はホイートストーンブリッジ回路を示す説明図。
【図4】取付部を示す側面図。
【図5】ステアリング操舵力計測システムの構成を示す説明図。
【符号の説明】
【0038】
10…ステアリング操舵力センサ、20…ホイール部、22…送信機、30…操舵力計測部、31…荷重計、31a…起ひずみ体、40…取付部、41…固定板、42…取付金具、50…操舵角スケール(操舵角センサ)、60…受信機、70…操舵角読取器、80…コントロールユニット、100…ステアリング操舵力計測システム、A…ステアリングホイール、B…ステアリングシャフト、A1,D1,A2,D2…ひずみゲージ。
【特許請求の範囲】
【請求項1】
ステアリングホイール上に取り付けられ、該ステアリングホイールに機械的に連結されたステアリングシャフトに作用する操舵力を計測するためのステアリング操舵力センサであって、
中空リング形状のホイール部と、
該ホイール部の中心を中心とする円周上に等間隔に配置され、該ホイール部の下方に固定された複数の荷重計からなる操舵力計測部と、
前記ホイール部の中心が前記ステアリングシャフトの回転軸心を通るように、操舵力計測部を前記ステアリングホイールへ取り付けるための取付部とを備え、
前記荷重計は、前記ステアリングシャフトの回転軸心方向の応力によって生ずるひずみ変形が反対方向に相等しくなるように形成された一対の起ひずみ部を有する起ひずみ体と、前記起ひずみ部に生ずるひずみ変形量をそれぞれ検出するよう当該起ひずみ部に貼着されたひずみゲージとを具備することを特徴とするステアリング操舵力センサ。
【請求項2】
前記取付部は、前記荷重計が上面に固定される中空リング形状の固定板と、該固定板に前記ステアリングホイールを取り付けるための取付具とから構成されることを特徴とする請求項1記載のステアリング操舵力センサ。
【請求項3】
前記ステアリングホイールの操舵角を検出する操舵角センサを備えることを特徴とする請求項1又は2記載のステアリング操舵力センサ。
【請求項4】
前記荷重計が検出したひずみ変形量に応じた電気信号を外部に無線送信する送信機を備えることを特徴とする請求項1から3のいずれか1項記載のステアリング操舵力センサ。
【請求項1】
ステアリングホイール上に取り付けられ、該ステアリングホイールに機械的に連結されたステアリングシャフトに作用する操舵力を計測するためのステアリング操舵力センサであって、
中空リング形状のホイール部と、
該ホイール部の中心を中心とする円周上に等間隔に配置され、該ホイール部の下方に固定された複数の荷重計からなる操舵力計測部と、
前記ホイール部の中心が前記ステアリングシャフトの回転軸心を通るように、操舵力計測部を前記ステアリングホイールへ取り付けるための取付部とを備え、
前記荷重計は、前記ステアリングシャフトの回転軸心方向の応力によって生ずるひずみ変形が反対方向に相等しくなるように形成された一対の起ひずみ部を有する起ひずみ体と、前記起ひずみ部に生ずるひずみ変形量をそれぞれ検出するよう当該起ひずみ部に貼着されたひずみゲージとを具備することを特徴とするステアリング操舵力センサ。
【請求項2】
前記取付部は、前記荷重計が上面に固定される中空リング形状の固定板と、該固定板に前記ステアリングホイールを取り付けるための取付具とから構成されることを特徴とする請求項1記載のステアリング操舵力センサ。
【請求項3】
前記ステアリングホイールの操舵角を検出する操舵角センサを備えることを特徴とする請求項1又は2記載のステアリング操舵力センサ。
【請求項4】
前記荷重計が検出したひずみ変形量に応じた電気信号を外部に無線送信する送信機を備えることを特徴とする請求項1から3のいずれか1項記載のステアリング操舵力センサ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2010−132220(P2010−132220A)
【公開日】平成22年6月17日(2010.6.17)
【国際特許分類】
【出願番号】特願2008−312122(P2008−312122)
【出願日】平成20年12月8日(2008.12.8)
【出願人】(000151520)株式会社東京測器研究所 (29)
【Fターム(参考)】
【公開日】平成22年6月17日(2010.6.17)
【国際特許分類】
【出願日】平成20年12月8日(2008.12.8)
【出願人】(000151520)株式会社東京測器研究所 (29)
【Fターム(参考)】
[ Back to top ]