
スティックスリップ検出装置および検出方法

【課題】スティックスリップの誤検出を高精度で抑制する。
【解決手段】弁軸変位より第1の状態量と第2の状態量とを算出し、第1のスティックスリップ指標算出部14において、第1の状態量と第2の状態量との比を第1のスティックスリップ指標SSpvとして求める。弁軸変位の制御指令値より第3の状態量と第4の状態量とを算出し、第2のスティックスリップ指標算出部24において、第3の状態量と第4の状態量との比を第2のスティックスリップ指標SSspとして求める。異常判断部30において、閾値をTh、第1の定数をα、第2の定数をβとし、「SSpv> Th AND SSpv>α・SSsp+β」を満足した場合に、スティックスリップが発生した判断する。
【解決手段】弁軸変位より第1の状態量と第2の状態量とを算出し、第1のスティックスリップ指標算出部14において、第1の状態量と第2の状態量との比を第1のスティックスリップ指標SSpvとして求める。弁軸変位の制御指令値より第3の状態量と第4の状態量とを算出し、第2のスティックスリップ指標算出部24において、第3の状態量と第4の状態量との比を第2のスティックスリップ指標SSspとして求める。異常判断部30において、閾値をTh、第1の定数をα、第2の定数をβとし、「SSpv> Th AND SSpv>α・SSsp+β」を満足した場合に、スティックスリップが発生した判断する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、調節弁やガスガバナなどの接触摺動部を有する装置の動作におけるスティックスリップを検出するスティックスリップ検出装置および検出方法に関するものである。
【背景技術】
【0002】
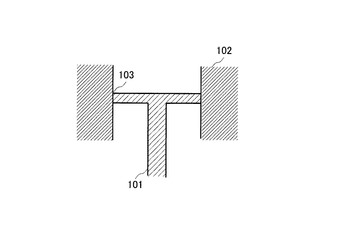
調節弁やガスガバナの故障は、接触摺動部におけるスティックスリップの発生を検出することで、診断することが可能である。スティックスリップは、例えば、図8に示すように、ピストン101とシリンダ102との接触摺動部103の状態によって発生するものである。例えば、このスティックスリップは、接触摺動部103に異物が混入したときなどに発生する。従って、ピストン101の変位を検出し、検出した変位の状態を監視することでスティックスリップを検出できる(特許文献1参照)。
【0003】
ここで、特許文献1に記載されたスティックスリップ検出について簡単に説明する。この検出技術では、ピストン101の変位を検出し、検出した変位より第1の状態量を算出し、また、検出した変位より第2の状態量を算出し、この算出した第1の状態量と第2の状態量との比と正常動作時の変位より得られる第1の状態量と第2の状態量との比とを比較することで、スティックスリップを検出(判断)している。このスティックスリップの検出において、第1の状態量と第2の状態量との比は、スティックスリップ指標と呼ばれている。
【0004】
例えば、第1の状態量として変位の1階差分値の絶対値の平均を用い、第2の状態量として変位の1階差分値の2乗平均の平方根を用いている。ピストン101の変位を離散的に検出する場合、i番目に検出した変位をXiとすると、各状態量は以下の式(1)および式(2)ように表される(ただし、Nは状態量の算出に用いた変位データの数である)。
【0005】
【数1】

【0006】
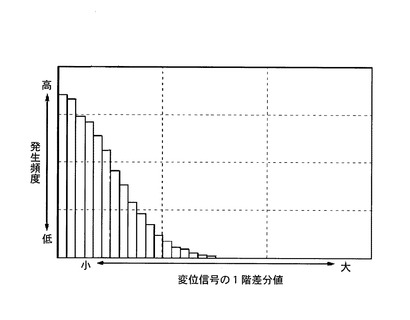
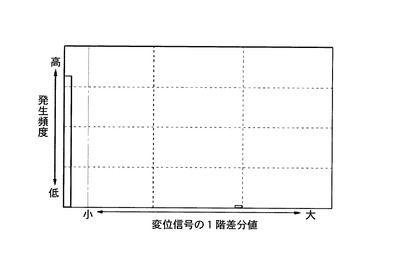
変位の1階差分値の絶対値(|Xi+1−Xi|)の頻度分布は、図9および図10に示すようになる。図9は、正常時の状態を示し、差分値が大きくなるにつれ発生頻度が緩やかに減少している。一方、スティックスリップが発生している場合、大半の時間は固着状態にあり、時々滑り状態が発生している。このため、1階差分値の頻度は、図10に示すように、高い頻度で0に近い値を取る一方で(固着状態に対応)、低い頻度ながら比較的大きな値を取ることもある(滑り状態に対応)。このようなスティックスリップが発生している状態では、第1の状態量(1階差分値の絶対値平均)と第2の状態量(1階差分値の2乗平均の平方根)との比が正常時より大きくなるので、2つの状態量の比を監視することでスティックスリップの発生を検出することができる。
【0007】
この特許文献1に示された技術では、スティックスリップの検出対象の動作が固着状態と滑り状態の2つに分かれていることを、可動部の変位から算出される2つの状態量とこれらの関係から検出する。これは、可動部の変位のみを用いて判断していることになる。このため、可動部の動き(変位)がスティックスリップの状態と同様であれば、スティックスリップが実際には発生していなくてもスティックスリップと誤って判断されることがある。これをスティックスリップの誤検出と呼ぶ。
【0008】
例えば、ポジショナによる調節弁の弁軸位置の制御において、弁軸変位の制御指令値(設定開度)が大きく変更される場合、制御指令値が変更されるときの弁軸(可動部)の変位の挙動は、スティックスリップの状態と同様となる場合がある。
【0009】
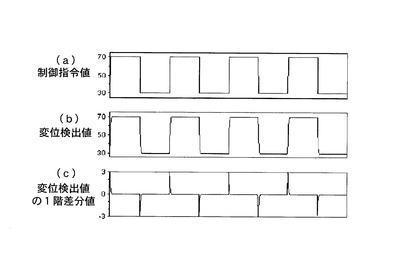
図11(a)に示すような、2つの値が交互に取られ、時系列信号が矩形波となっている変位に対する制御指令値が与えられると、これに対応し、調節弁の弁軸変位の応答は、図11(b)に示すような時系列信号の変位測定値として測定される。このような変位測定値の1階差分値は、図11(c)に示すようになる。この場合、図11(c)に示されるように、1階差分値は大半の時間は0に近い値を取るが、制御指令値が変わった直後のみ大きな値を取る。
【0010】
この挙動は、大半の時間は固着状態にあり、時々滑り状態となって速い動きをするというスティックスリップ現象の挙動と同様である。この結果、特許文献1に示された技術では、図11(a)に示すような制御を行っているときに、スティックスリップが発生しているものとして誤検知を起こしてしまう。このような誤検知は、弁の動作速度が速い場合に起きやすく、小型の弁で特に問題となる。
【0011】
そこで、本出願人は、スティックスリップの誤検出を抑制する方法として、特許文献2に示されるような技術を提案した。この特許文献2に示された技術では、変位だけではなく制御指令値からもスティックスリップ指標を算出し、変位から算出したスティックスリップ指標を第1のスティックスリップ指標、制御指令値から算出したスティックスリップ指標を第2のスティックスリップ指標とし、第2のスティックスリップ指標が第1のスティックスリップ指標よりも大きい場合にはスティックスリップの検出対象から外す。
【0012】
すなわち、スティックスリップが発生していると判断される動作を行わせる制御指令が与えられた場合、正常な動作をする可動部の変位は、制御指令値よりも滑らかな挙動となる。このような場合、制御指令値より算出される第2のスティックスリップ指標は、可動部の変位より算出される第1のスティックスリップ指標よりも大きくなる。したがって、第2のスティックスリップ指標が第1のスティックスリップ指標よりも大きくなった場合にスティックスリップの検出対象から外すことにより、スティックスリップの誤検出を抑制することができるようになる。
【先行技術文献】
【特許文献】
【0013】
【特許文献1】特許第3254624号公報
【特許文献2】特開2011−80787号公報
【発明の概要】
【発明が解決しようとする課題】
【0014】
しかしながら、特許文献2に示された技術は完全なものとは言えず、スティックスリップの誤検出を高精度で抑制することができるとは言い難かった。
【0015】
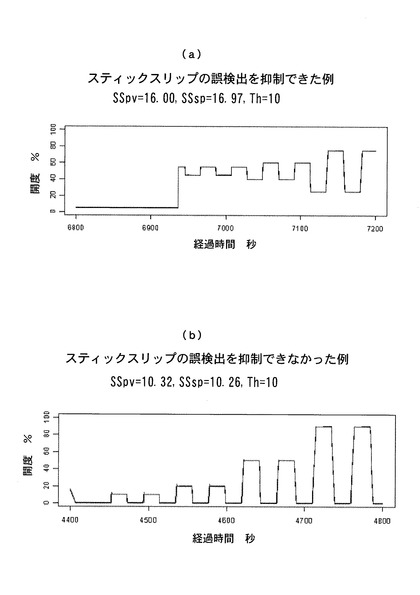
図12(a),(b)にスティックスリップの誤検出を抑制できた場合の制御指令値の変化と抑制できなかった場合の制御指令値の変化を対比して示す。図12(a),(b)ともに、実際にスティックスリップは起きていない状態であり、図12(a)はスティックスリップの誤検出を抑制できた例、図12(b)はスティックスリップの誤検出を抑制できなかった例である。
【0016】
この例において、変位から算出した第1のスティックスリップ指標をSSpv、制御指令値から算出した第2のスティックスリップ指標をSSsp、第1のスティックスリップ指標SSpvの正常/異常を判断するための閾値をThとする。なお、この例において、閾値ThはTh=10として定められているものとする。
【0017】
図12(a),(b)ともに弁の動きがスティックスリップのように「静止」と「急激な開度変化」とを繰り返しており、図12(a)では、SSpv=16.00、SSsp=16.97として算出され、図12(b)では、SSpv=10.32、SSsp=10.26として算出されている。
【0018】
図12(a)において、SSpvは16.00であり、閾値Th=10を超えているので(SSpv>Th)、特許文献1に示された技術ではスティックスリップの発生として検出される。しかし、SSspは16.97で、SSpv=16.00以上である(SSsp≧SSpv)。このため、特許文献2に示された技術によって、スティックスリップの検出対象から外される。したがって、図12(a)に示された例では、スティックスリップの誤検出が抑制されることになる。
【0019】
図12(b)において、SSpvは10.32であり、閾値Th=10を超えているので(SSpv>Th)、特許文献1に示された技術ではスティックスリップの発生として検出される。この場合、SSspは10.26で、SSpv=10.32よりも小さい(SSsp<SSpv)。このため、特許文献2に示された技術によって、スティックスリップの検出対象から外されることはない。したがって、図12(b)に示された例では、スティックスリップの誤検出が生じる。
【0020】
このように、特許文献2に示された技術では、スティックスリップの誤検出が生じることがあり、スティックスリップの誤検出を高精度で抑制することができるとは言えなかった。
【0021】
本発明は、このような課題を解決するためになされたもので、その目的とするところは、スティックスリップの誤検出を高精度で抑制することが可能なスティックスリップ検出装置および検出方法を提供することにある。
【課題を解決するための手段】
【0022】
このような目的を達成するために本発明は、接触摺動部を有する可動部の変位を検出する変位検出手段と、変位より第1の状態量を算出する第1の状態量算出手段と、変位より第2の状態量を算出する第2の状態量算出手段と、第1の状態量と第2の状態量との比を変位による第1のスティックスリップ指標として算出する第1のスティックスリップ指標算出手段と、可動部の変位を制御する制御指令値を受信する制御指令受信手段と、制御指令値より第3の状態量を算出する第3の状態量算出手段と、制御指令値より第4の状態量を算出する第4の状態量算出手段と、第3の状態量と第4の状態量との比を制御指令値による第2のスティックスリップ指標として算出する第2のスティックスリップ指標算出手段と、第1のスティックスリップ指標をSSpv、第2のスティックスリップ指標をSSsp、閾値をTh、第1の定数をα、第2の定数をβとした時、下記(3)式で示される条件式を満足した場合に、可動部の異常と判断する異常判断手段とを備えることを特徴とする。
【0023】
SSpv> Th AND SSpv>α・SSsp+β ・・・・(3)
但し、(3)式において、α=1,β=0の場合は除く。
【0024】
この発明によれば、上記(3)式を満たした時にのみ、スティックスリップの発生として検出される。この(3)式において、α,βを調整すれば、スティックスリップの検出範囲が調整される。これにより、α,βを調整パラメータとして、スティックスリップの検出範囲を実績に基づいて高精度でチューニングし、スティックスリップの誤検出を高精度で抑制させるようにすることが可能となる。
【0025】
本発明では、α,βを調整パラメータとして導入する。この場合、例えば、1つの方式として、第1および第2のスティックスリップ指標の正常状態での関係を学習するようにし、この学習した第1および第2のスティックスリップ指標の正常状態での関係に基づいて第1の定数αおよび第2の定数βを定め、この定めた第1の定数αおよび第2の定数βを上記(3)式に対して設定するようにすることが考えられる。
【0026】
また、別の方式として、第1および第2のスティックスリップ指標の正常状態と異常状態での関係を学習するようにし、この学習した第1および第2のスティックスリップ指標の正常状態と異常状態での関係に基づいて、誤検出抑制を重視するか異常見逃し抑制を重視するかを判断基準として第1の定数αおよび第2の定数βを定め、この定めた第1の定数αおよび第2の定数βを上記(3)式に対して設定するようにすることが考えられる。
【0027】
なお、本発明は、スティックスリップ検出装置としてではなく、スティックスリップ検出方法としても実現することが可能である。請求項4〜6に係る発明は、請求項1〜3のスティックスリップ検出装置に係る発明を方法としたものである。
【発明の効果】
【0028】
本発明によれば、第1のスティックスリップ指標をSSpv、第2のスティックスリップ指標をSSsp、閾値をTh、第1の定数をα、第2の定数をβとした時、上記(3)式で示される条件式を満足した場合に、可動部の異常と判断させるようにしたので、α,βを調整パラメータとし、スティックスリップの検出範囲を実績に基づいて高精度でチューニングし、スティックスリップの誤検出を高精度で抑制させるようにすることが可能となる。
【図面の簡単な説明】
【0029】
【図1】本発明に係るスティックスリップ検出装置の一実施の形態の要部を示す図である。
【図2】与えられた制御指令値と変位信号との関係を示す図である。
【図3】与えられた制御指令値と変位信号との関係を示す図である。
【図4】正常な状態でのスティックスリップ指標をプロットしてアラーム発報の境界線となる直線Xの傾きαおよび切片βを求める例を示す図である。
【図5】正常な状態でのスティックスリップ指標と異常な状態でのスティックスリップ指標をプロットしてアラーム発報の境界線となる直線Xの傾きαおよび切片βを求める例を示す図である。
【図6】ある機種のコントロールバルブに対して様々な条件でスティックスリップ指標を計算した結果をプロットした例を示す図である。
【図7】誤検出抑制を重視した場合のアラーム発報の境界線とされる直線X1と異常見逃し抑制を重視した場合のアラーム発報の境界線とされる直線X2を例示する図である。
【図8】接触摺動部分を有する装置の構成を示す図である。
【図9】往復摺動している部位より得られる変位信号の1階差分値の発生頻度分布を示すヒストグラム(スティックスリップが発生していない場合)である。
【図10】往復摺動している部位より得られる変位信号の1階差分値の発生頻度分布を示すヒストグラム(スティックスリップが発生している場合)である。
【図11】制御指令値と変位検出値と変位検出値の1階差分値との変化を示すタイミングチャートである。
【図12】スティックスリップの誤検出を抑制できた場合の制御指令値の変化と抑制できなかった場合の制御指令値の変化を対比して示すタイムチャートである。
【発明を実施するための形態】
【0030】
以下、本発明の実施の形態を図面に基づいて詳細に説明する。
【0031】
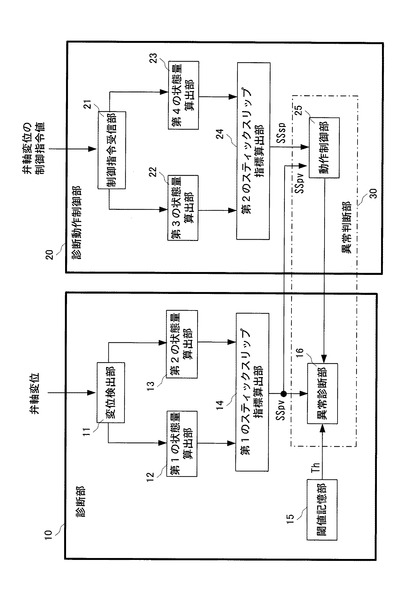
図1はこの発明に係るスティックスリップ検出装置の一実施の形態の要部を示す図である。このスティックスリップ検出装置は、接触摺動部を有する可動部の変位をもとに異常を診断する診断部10と、可動部の変位を制御する制御指令値をもとに診断部10の動作を停止する診断動作制御部20とを備えている。
【0032】
なお、この実施の形態において、接触摺動部を有する可動部の変位はポジショナによって弁開度が制御される調節弁の弁軸変位とし、可動部の変位を制御する制御指令値はポジショナへの弁軸変位の制御指令値とする。
【0033】
診断部10は、変位検出部11,第1の状態量算出部12,第2の状態量算出部13,第1のスティックスリップ指標算出部14,閾値記憶部15および異常診断部16を備えている。
【0034】
変位検出部11は、弁軸変位を検出し、例えば、デジタル信号の変位信号を出力する。第1の状態量算出部12は、変位検出部11からの変位信号より第1の状態量として1階差分値の絶対値の平均を算出する。第2の状態量算出部13は、変位検出部11からの変位信号より第2の状態量として1階差分値の2乗平均の平方根を算出する。
【0035】
第1のスティックスリップ指標算出部14は、第1の状態量算出部12によって算出された第1の状態量と第2の状態量算出部13によって算出された第2の状態量との比を変位による第1のスティックスリップ指標SSpvとして算出する。
【0036】
閾値記憶部14には、第1のスティックスリップ指標SSpvの正常/異常を判断するための閾値Thが格納されている。異常診断部16は、第1のスティックスリップ指標算出部14によって算出された第1のスティックスリップ指標SSpvと閾値記憶部14に格納されている閾値Thとを比較し、SSpv>Thであった場合に、スティックスリップが発生したものと判断する。
【0037】
一方、診断動作制御部20は、制御指令受信部21,第3の状態量算出部22,第4の状態量算出部23,第2のスティックスリップ指標算出部24および動作制御部25を備えている。
【0038】
制御指令受信部21は、ポジショナへの弁軸変位の制御指令値を受信する。第3の状態量算出部22は、指令値受信部21が受信した制御指令値より、第3の状態量として1階差分値の絶対値の平均を算出する。これは、検出された変位信号より第1の状態量として1階差分値の絶対値の平均を算出する第1の状態量算出部12と同様の動作である。
【0039】
第4の状態量算出部23は、制御指令受信部21が受信した制御指令値より、第4の状態量として1階差分値の2乗平均の平方根を算出する。これは、検出された変位信号より第2の状態量として1階差分値の2乗平均の平方根を算出する第2の状態量算出部13と同様の動作である。
【0040】
第2のスティックスリップ指標算出部24は、第3の状態量算出部22によって算出された第3の状態量と第4の状態量算出部23によって算出された第4の状態量との比を制御指令値による第2のスティックスリップ指標SSspとして算出する。
【0041】
動作制御部25は、診断部10における第1のスティックスリップ指標算出部24からの第1のスティックスリップSSpvと第2のスティックスリップ指標算出部24からの第2のスティックスリップ指標SSspを入力とし、SSpv≦α・SSsp+βである場合に、診断部10における異常診断部16の判断動作を停止させる。なお、αは第1の定数、βは第2の定数であり、後述する学習処理によって定められている。
【0042】
この実施の形態では、診断部10における異常診断部16と診断動作制御部20における動作制御部25とによって本発明でいう異常判断手段に対応する異常判断部30が構成されている。この異常判断部30は、異常診断部16と動作制御部25との動作の組み合わせによって、「SSpv> Th AND SSpv>α・SSsp+β」なる条件式を満足した場合に、スティックスリップが発生したものと判断する。
【0043】
このスティックスリップ検出装置において、図2に点線Iで示すような変位の制御指令値が与えられる場合について考える。このような制御指令値に対して弁軸が正常に動作すれば、変位検出部11で検出されて出力される変位信号も、同様の状態となり、異常診断部16では、スティックスリップが発生したものとは判断されない。また、このような制御指令値をもとに第3の状態量および第4の状態量を算出すれば、このような場合、第1の状態量と第2の状態量との比を示す第1のスティックスリップ指標SSpvは、第3の状態量と第4の状態量との比を示す第2のスティックスリップ指標SSspよりも大きいものとなる(SSpv>SSsp)。
【0044】
一方、スティックスリップが発生している場合、変位検出部11で検出されて出力される変位信号は、図2に実線IIで示されるような階段状のものとなる。このような変位信号が検出されると、異常診断部16では、スティックスリップが発生しているものと判断する。この場合も、第1の状態量と第2の状態量との比を示す第1のスティックスリップ指標SSpvは、第3の状態量と第4の状態量との比を示す第2のスティックスリップ指標SSspよりも大きいものとなる(SSpv>SSsp)。
【0045】
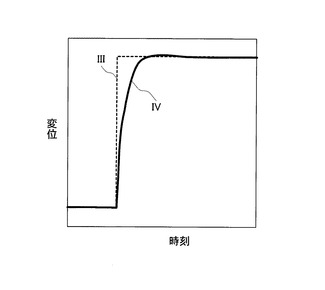
以上の場合に対し、図3に点線IIIで示されるような変位の制御指令値が与えられる場合について考える。このような制御指令値が与えられると、弁軸が正常に動作しても、変位検出部11で検出される変位信号は、図3に実線IVで示されるものとなる。このような状態では、異常診断部16では、スティックスリップが発生しているものと判断してしまう。ここで、制御指令値をもとに第3の状態量および第4の状態量を算出すれば、第3の状態量と第4の状態量との比を示す第2のスティックスリップ指標SSspは、第1の状態量と第2の状態量との比を示す第1のスティックスリップ指標SSpv以上となる(SSsp≧SSpv)。
【0046】
従って、制御指令値による第2のスティックスリップ指標SSspが変位による第1のスティックスリップ指標SSpv以上となったことを検出した場合(SSsp≧SSpv)に異常診断部16の判断動作を停止することで、換言すればSSpv>SSspである場合にのみ異常診断部16の判断動作を許可することにより、スティックスリップの誤判断が抑制できるようになる。
【0047】
しかし、SSpv>SSspとしただけでは、特許文献2に示された技術と同じであり、スティックスリップの誤検出を高精度で抑制することはできない。そこで、本実施の形態では、α,βを調整パラメータとして導入し、異常判断部30において、SSpv>α・SSsp+βである場合にのみ、異常診断部16の判断動作を許可するようにする。これは、動作制御部25が、SSpv≦α・SSsp+βである場合に、診断部10における異常診断部16の判断動作を停止させることによって実現される。
【0048】
この場合、異常判断部30において、下記(4)式で示されるなる条件式を満足した場合に、スティックスリップが発生したものと判断される。なお、この条件式において、α=1,β=0にすると、特許文献2と同じとなる。このため、本発明において、α=1,β=0の場合は除くものとした。
SSpv> Th AND SSpv>α・SSsp+β ・・・・(4)
【0049】
〔学習処理(学習によるαとβの調整)〕
調整パラメータであるα,βを求めるためには、工場出荷時の検査運転中、あるいはプロセス制御中に、次のような学習処理を行う
【0050】
(1)スティックスリップの起きていない正常な状態で、変位によるスティックスリップ指標SSpv、制御指令値によるスティックスリップ指標SSspを算出する。
(2)図4に示すスティックスリップ指標平面上に、(1)で算出した変位によるスティックスリップ指標SSpvと制御指令値によるスティックスリップ指標SSspとをプロットする。図4中、○印は、スティックスリップ指標のプロット点である。
(3)(2)でプロットされた状態を誤検出しないように、アラーム発報の境界線とされる直線Xの傾きαと切片βを定める。
(4)このようにして定めたα,βを上記(4)式に設定する。
【0051】
ここで、直線Xの傾きαと切片βを定める方法としては、幾つかのバリエーションが考えられる。例えば、βを0に固定し、αのみを誤検出率が零になるまで大きくしてもよいし、逆にαを固定し、βを誤検出率が零になるまで大きくしてもよい。
【0052】
なお、実際にスティックスリップが起きているときのデータが入手できれば、誤検出率をなるべく低く抑えつつ、同時に検出率(正解率)を高めるような学習も可能となる。例えば、線形判別分析などによってαとβを定めればよい。また、サポートベクターマシンのような非線形判別の手法を適用してもよい。図5にその模式図を示す。
【0053】
図5では、制御指令値によるスティックスリップ指標SSspと変位によるスティックスリップ指標SSpvがともに閾値Thとなる点を支点に直線Xの傾きを変えて、スティックスリップの検出範囲(アラーム発報領域)を調整している。なお、図5において、○印は正常な状態でのスティックスリップ指標のプロット点であり、×印は異常な状態でのスティックスリップ指標のプロット点である。
【0054】
図6はある機種のコントロールバルブに対して、様々な条件でスティックスリップ指標を計算した結果をプロットしたものである。「異常(●印)」はスティックスリップが起こる力をバルブステムに加えた場合のデータである。「正常(○印)」ではバルブステムに力をかけておらず、スティックスリップは起こっていない。
【0055】
図6の例では、制御指令値が大きい場合に、正常と異常とが混在している。ここで、誤検出抑制を重視するならば、例えば図7に実線の直線X1で示すように、上記(4)式中の「SSpv>α・SSsp+β」において、αを1、βをSSpv−10と置けばよい。すなわち、「SSpv>α・SSsp+β」を「10>SSsp」とすればよい。なお、この場合、異常であるのに検出できないリスクは残る。また、異常見逃し抑制を重視するならば、図7中に点線の直線X2で示すように、傾きαを小さくし、閾値Thの直線に近づけるようにすればよい。なお、この場合、正常を異常と誤検出するリスクはある。
【0056】
なお、上述した実施の形態では、第1の状態量および第3の状態量として1階差分値の絶対値の平均を算出し、第2の状態量および第4の状態量として1階差分値の2乗平均の平方根を算出したが、これに限られるものではない。例えば、第1の状態量および第3の状態量として1階差分値の2乗平均を算出し、第2の状態量および第4の状態量として2階差分値の2乗平均を算出するようにしてもよい。
【0057】
また、上述したスティックスリップ検出は、検出された変位をコンピュータで処理することでスティックスリップを検出するようにしてもよい。例えば、コンピュータを構成するCPUがバスを介して接続されているメモリに展開されているプログラムにより動作することで、得られた変位信号を処理して診断結果を出力し、また、得られた制御指令値より診断結果を得る処理を停止してもよい。
【0058】
ここで、上記プログラムは、前述した各実施の形態で説明したスティックスリップ検出の処理を、CPU(コンピュータ)に行わせるものである。また、メモリに展開されているプログラムは、バスを介して外部接続される外部記憶装置に格納されているものを取り込んで展開すればよい。外部記憶装置としては、例えば、磁気ディスク記憶装置などがある。
【0059】
〔実施の形態の拡張〕
以上、実施の形態を参照して本発明を説明したが、本発明は上記実施の形態に限定されるものではない。本発明の構成や詳細には、本発明の技術的範囲内で当業者が理解しうる様々な変更をすることができる。
【符号の説明】
【0060】
10…診断部、11…変位検出部、12…第1の状態量算出部、13…第2の状態量算出部、14…第1のスティックスリップ指標算出部、15…閾値記憶部、16…異常診断部、20…診断動作制御部、21…制御指令受信部、22…第3の状態量算出部、23…第4の状態量算出部、24…第2のスティックスリップ指標算出部、25…動作制御部、30…異常判断部。
【技術分野】
【0001】
この発明は、調節弁やガスガバナなどの接触摺動部を有する装置の動作におけるスティックスリップを検出するスティックスリップ検出装置および検出方法に関するものである。
【背景技術】
【0002】
調節弁やガスガバナの故障は、接触摺動部におけるスティックスリップの発生を検出することで、診断することが可能である。スティックスリップは、例えば、図8に示すように、ピストン101とシリンダ102との接触摺動部103の状態によって発生するものである。例えば、このスティックスリップは、接触摺動部103に異物が混入したときなどに発生する。従って、ピストン101の変位を検出し、検出した変位の状態を監視することでスティックスリップを検出できる(特許文献1参照)。
【0003】
ここで、特許文献1に記載されたスティックスリップ検出について簡単に説明する。この検出技術では、ピストン101の変位を検出し、検出した変位より第1の状態量を算出し、また、検出した変位より第2の状態量を算出し、この算出した第1の状態量と第2の状態量との比と正常動作時の変位より得られる第1の状態量と第2の状態量との比とを比較することで、スティックスリップを検出(判断)している。このスティックスリップの検出において、第1の状態量と第2の状態量との比は、スティックスリップ指標と呼ばれている。
【0004】
例えば、第1の状態量として変位の1階差分値の絶対値の平均を用い、第2の状態量として変位の1階差分値の2乗平均の平方根を用いている。ピストン101の変位を離散的に検出する場合、i番目に検出した変位をXiとすると、各状態量は以下の式(1)および式(2)ように表される(ただし、Nは状態量の算出に用いた変位データの数である)。
【0005】
【数1】
【0006】
変位の1階差分値の絶対値(|Xi+1−Xi|)の頻度分布は、図9および図10に示すようになる。図9は、正常時の状態を示し、差分値が大きくなるにつれ発生頻度が緩やかに減少している。一方、スティックスリップが発生している場合、大半の時間は固着状態にあり、時々滑り状態が発生している。このため、1階差分値の頻度は、図10に示すように、高い頻度で0に近い値を取る一方で(固着状態に対応)、低い頻度ながら比較的大きな値を取ることもある(滑り状態に対応)。このようなスティックスリップが発生している状態では、第1の状態量(1階差分値の絶対値平均)と第2の状態量(1階差分値の2乗平均の平方根)との比が正常時より大きくなるので、2つの状態量の比を監視することでスティックスリップの発生を検出することができる。
【0007】
この特許文献1に示された技術では、スティックスリップの検出対象の動作が固着状態と滑り状態の2つに分かれていることを、可動部の変位から算出される2つの状態量とこれらの関係から検出する。これは、可動部の変位のみを用いて判断していることになる。このため、可動部の動き(変位)がスティックスリップの状態と同様であれば、スティックスリップが実際には発生していなくてもスティックスリップと誤って判断されることがある。これをスティックスリップの誤検出と呼ぶ。
【0008】
例えば、ポジショナによる調節弁の弁軸位置の制御において、弁軸変位の制御指令値(設定開度)が大きく変更される場合、制御指令値が変更されるときの弁軸(可動部)の変位の挙動は、スティックスリップの状態と同様となる場合がある。
【0009】
図11(a)に示すような、2つの値が交互に取られ、時系列信号が矩形波となっている変位に対する制御指令値が与えられると、これに対応し、調節弁の弁軸変位の応答は、図11(b)に示すような時系列信号の変位測定値として測定される。このような変位測定値の1階差分値は、図11(c)に示すようになる。この場合、図11(c)に示されるように、1階差分値は大半の時間は0に近い値を取るが、制御指令値が変わった直後のみ大きな値を取る。
【0010】
この挙動は、大半の時間は固着状態にあり、時々滑り状態となって速い動きをするというスティックスリップ現象の挙動と同様である。この結果、特許文献1に示された技術では、図11(a)に示すような制御を行っているときに、スティックスリップが発生しているものとして誤検知を起こしてしまう。このような誤検知は、弁の動作速度が速い場合に起きやすく、小型の弁で特に問題となる。
【0011】
そこで、本出願人は、スティックスリップの誤検出を抑制する方法として、特許文献2に示されるような技術を提案した。この特許文献2に示された技術では、変位だけではなく制御指令値からもスティックスリップ指標を算出し、変位から算出したスティックスリップ指標を第1のスティックスリップ指標、制御指令値から算出したスティックスリップ指標を第2のスティックスリップ指標とし、第2のスティックスリップ指標が第1のスティックスリップ指標よりも大きい場合にはスティックスリップの検出対象から外す。
【0012】
すなわち、スティックスリップが発生していると判断される動作を行わせる制御指令が与えられた場合、正常な動作をする可動部の変位は、制御指令値よりも滑らかな挙動となる。このような場合、制御指令値より算出される第2のスティックスリップ指標は、可動部の変位より算出される第1のスティックスリップ指標よりも大きくなる。したがって、第2のスティックスリップ指標が第1のスティックスリップ指標よりも大きくなった場合にスティックスリップの検出対象から外すことにより、スティックスリップの誤検出を抑制することができるようになる。
【先行技術文献】
【特許文献】
【0013】
【特許文献1】特許第3254624号公報
【特許文献2】特開2011−80787号公報
【発明の概要】
【発明が解決しようとする課題】
【0014】
しかしながら、特許文献2に示された技術は完全なものとは言えず、スティックスリップの誤検出を高精度で抑制することができるとは言い難かった。
【0015】
図12(a),(b)にスティックスリップの誤検出を抑制できた場合の制御指令値の変化と抑制できなかった場合の制御指令値の変化を対比して示す。図12(a),(b)ともに、実際にスティックスリップは起きていない状態であり、図12(a)はスティックスリップの誤検出を抑制できた例、図12(b)はスティックスリップの誤検出を抑制できなかった例である。
【0016】
この例において、変位から算出した第1のスティックスリップ指標をSSpv、制御指令値から算出した第2のスティックスリップ指標をSSsp、第1のスティックスリップ指標SSpvの正常/異常を判断するための閾値をThとする。なお、この例において、閾値ThはTh=10として定められているものとする。
【0017】
図12(a),(b)ともに弁の動きがスティックスリップのように「静止」と「急激な開度変化」とを繰り返しており、図12(a)では、SSpv=16.00、SSsp=16.97として算出され、図12(b)では、SSpv=10.32、SSsp=10.26として算出されている。
【0018】
図12(a)において、SSpvは16.00であり、閾値Th=10を超えているので(SSpv>Th)、特許文献1に示された技術ではスティックスリップの発生として検出される。しかし、SSspは16.97で、SSpv=16.00以上である(SSsp≧SSpv)。このため、特許文献2に示された技術によって、スティックスリップの検出対象から外される。したがって、図12(a)に示された例では、スティックスリップの誤検出が抑制されることになる。
【0019】
図12(b)において、SSpvは10.32であり、閾値Th=10を超えているので(SSpv>Th)、特許文献1に示された技術ではスティックスリップの発生として検出される。この場合、SSspは10.26で、SSpv=10.32よりも小さい(SSsp<SSpv)。このため、特許文献2に示された技術によって、スティックスリップの検出対象から外されることはない。したがって、図12(b)に示された例では、スティックスリップの誤検出が生じる。
【0020】
このように、特許文献2に示された技術では、スティックスリップの誤検出が生じることがあり、スティックスリップの誤検出を高精度で抑制することができるとは言えなかった。
【0021】
本発明は、このような課題を解決するためになされたもので、その目的とするところは、スティックスリップの誤検出を高精度で抑制することが可能なスティックスリップ検出装置および検出方法を提供することにある。
【課題を解決するための手段】
【0022】
このような目的を達成するために本発明は、接触摺動部を有する可動部の変位を検出する変位検出手段と、変位より第1の状態量を算出する第1の状態量算出手段と、変位より第2の状態量を算出する第2の状態量算出手段と、第1の状態量と第2の状態量との比を変位による第1のスティックスリップ指標として算出する第1のスティックスリップ指標算出手段と、可動部の変位を制御する制御指令値を受信する制御指令受信手段と、制御指令値より第3の状態量を算出する第3の状態量算出手段と、制御指令値より第4の状態量を算出する第4の状態量算出手段と、第3の状態量と第4の状態量との比を制御指令値による第2のスティックスリップ指標として算出する第2のスティックスリップ指標算出手段と、第1のスティックスリップ指標をSSpv、第2のスティックスリップ指標をSSsp、閾値をTh、第1の定数をα、第2の定数をβとした時、下記(3)式で示される条件式を満足した場合に、可動部の異常と判断する異常判断手段とを備えることを特徴とする。
【0023】
SSpv> Th AND SSpv>α・SSsp+β ・・・・(3)
但し、(3)式において、α=1,β=0の場合は除く。
【0024】
この発明によれば、上記(3)式を満たした時にのみ、スティックスリップの発生として検出される。この(3)式において、α,βを調整すれば、スティックスリップの検出範囲が調整される。これにより、α,βを調整パラメータとして、スティックスリップの検出範囲を実績に基づいて高精度でチューニングし、スティックスリップの誤検出を高精度で抑制させるようにすることが可能となる。
【0025】
本発明では、α,βを調整パラメータとして導入する。この場合、例えば、1つの方式として、第1および第2のスティックスリップ指標の正常状態での関係を学習するようにし、この学習した第1および第2のスティックスリップ指標の正常状態での関係に基づいて第1の定数αおよび第2の定数βを定め、この定めた第1の定数αおよび第2の定数βを上記(3)式に対して設定するようにすることが考えられる。
【0026】
また、別の方式として、第1および第2のスティックスリップ指標の正常状態と異常状態での関係を学習するようにし、この学習した第1および第2のスティックスリップ指標の正常状態と異常状態での関係に基づいて、誤検出抑制を重視するか異常見逃し抑制を重視するかを判断基準として第1の定数αおよび第2の定数βを定め、この定めた第1の定数αおよび第2の定数βを上記(3)式に対して設定するようにすることが考えられる。
【0027】
なお、本発明は、スティックスリップ検出装置としてではなく、スティックスリップ検出方法としても実現することが可能である。請求項4〜6に係る発明は、請求項1〜3のスティックスリップ検出装置に係る発明を方法としたものである。
【発明の効果】
【0028】
本発明によれば、第1のスティックスリップ指標をSSpv、第2のスティックスリップ指標をSSsp、閾値をTh、第1の定数をα、第2の定数をβとした時、上記(3)式で示される条件式を満足した場合に、可動部の異常と判断させるようにしたので、α,βを調整パラメータとし、スティックスリップの検出範囲を実績に基づいて高精度でチューニングし、スティックスリップの誤検出を高精度で抑制させるようにすることが可能となる。
【図面の簡単な説明】
【0029】
【図1】本発明に係るスティックスリップ検出装置の一実施の形態の要部を示す図である。
【図2】与えられた制御指令値と変位信号との関係を示す図である。
【図3】与えられた制御指令値と変位信号との関係を示す図である。
【図4】正常な状態でのスティックスリップ指標をプロットしてアラーム発報の境界線となる直線Xの傾きαおよび切片βを求める例を示す図である。
【図5】正常な状態でのスティックスリップ指標と異常な状態でのスティックスリップ指標をプロットしてアラーム発報の境界線となる直線Xの傾きαおよび切片βを求める例を示す図である。
【図6】ある機種のコントロールバルブに対して様々な条件でスティックスリップ指標を計算した結果をプロットした例を示す図である。
【図7】誤検出抑制を重視した場合のアラーム発報の境界線とされる直線X1と異常見逃し抑制を重視した場合のアラーム発報の境界線とされる直線X2を例示する図である。
【図8】接触摺動部分を有する装置の構成を示す図である。
【図9】往復摺動している部位より得られる変位信号の1階差分値の発生頻度分布を示すヒストグラム(スティックスリップが発生していない場合)である。
【図10】往復摺動している部位より得られる変位信号の1階差分値の発生頻度分布を示すヒストグラム(スティックスリップが発生している場合)である。
【図11】制御指令値と変位検出値と変位検出値の1階差分値との変化を示すタイミングチャートである。
【図12】スティックスリップの誤検出を抑制できた場合の制御指令値の変化と抑制できなかった場合の制御指令値の変化を対比して示すタイムチャートである。
【発明を実施するための形態】
【0030】
以下、本発明の実施の形態を図面に基づいて詳細に説明する。
【0031】
図1はこの発明に係るスティックスリップ検出装置の一実施の形態の要部を示す図である。このスティックスリップ検出装置は、接触摺動部を有する可動部の変位をもとに異常を診断する診断部10と、可動部の変位を制御する制御指令値をもとに診断部10の動作を停止する診断動作制御部20とを備えている。
【0032】
なお、この実施の形態において、接触摺動部を有する可動部の変位はポジショナによって弁開度が制御される調節弁の弁軸変位とし、可動部の変位を制御する制御指令値はポジショナへの弁軸変位の制御指令値とする。
【0033】
診断部10は、変位検出部11,第1の状態量算出部12,第2の状態量算出部13,第1のスティックスリップ指標算出部14,閾値記憶部15および異常診断部16を備えている。
【0034】
変位検出部11は、弁軸変位を検出し、例えば、デジタル信号の変位信号を出力する。第1の状態量算出部12は、変位検出部11からの変位信号より第1の状態量として1階差分値の絶対値の平均を算出する。第2の状態量算出部13は、変位検出部11からの変位信号より第2の状態量として1階差分値の2乗平均の平方根を算出する。
【0035】
第1のスティックスリップ指標算出部14は、第1の状態量算出部12によって算出された第1の状態量と第2の状態量算出部13によって算出された第2の状態量との比を変位による第1のスティックスリップ指標SSpvとして算出する。
【0036】
閾値記憶部14には、第1のスティックスリップ指標SSpvの正常/異常を判断するための閾値Thが格納されている。異常診断部16は、第1のスティックスリップ指標算出部14によって算出された第1のスティックスリップ指標SSpvと閾値記憶部14に格納されている閾値Thとを比較し、SSpv>Thであった場合に、スティックスリップが発生したものと判断する。
【0037】
一方、診断動作制御部20は、制御指令受信部21,第3の状態量算出部22,第4の状態量算出部23,第2のスティックスリップ指標算出部24および動作制御部25を備えている。
【0038】
制御指令受信部21は、ポジショナへの弁軸変位の制御指令値を受信する。第3の状態量算出部22は、指令値受信部21が受信した制御指令値より、第3の状態量として1階差分値の絶対値の平均を算出する。これは、検出された変位信号より第1の状態量として1階差分値の絶対値の平均を算出する第1の状態量算出部12と同様の動作である。
【0039】
第4の状態量算出部23は、制御指令受信部21が受信した制御指令値より、第4の状態量として1階差分値の2乗平均の平方根を算出する。これは、検出された変位信号より第2の状態量として1階差分値の2乗平均の平方根を算出する第2の状態量算出部13と同様の動作である。
【0040】
第2のスティックスリップ指標算出部24は、第3の状態量算出部22によって算出された第3の状態量と第4の状態量算出部23によって算出された第4の状態量との比を制御指令値による第2のスティックスリップ指標SSspとして算出する。
【0041】
動作制御部25は、診断部10における第1のスティックスリップ指標算出部24からの第1のスティックスリップSSpvと第2のスティックスリップ指標算出部24からの第2のスティックスリップ指標SSspを入力とし、SSpv≦α・SSsp+βである場合に、診断部10における異常診断部16の判断動作を停止させる。なお、αは第1の定数、βは第2の定数であり、後述する学習処理によって定められている。
【0042】
この実施の形態では、診断部10における異常診断部16と診断動作制御部20における動作制御部25とによって本発明でいう異常判断手段に対応する異常判断部30が構成されている。この異常判断部30は、異常診断部16と動作制御部25との動作の組み合わせによって、「SSpv> Th AND SSpv>α・SSsp+β」なる条件式を満足した場合に、スティックスリップが発生したものと判断する。
【0043】
このスティックスリップ検出装置において、図2に点線Iで示すような変位の制御指令値が与えられる場合について考える。このような制御指令値に対して弁軸が正常に動作すれば、変位検出部11で検出されて出力される変位信号も、同様の状態となり、異常診断部16では、スティックスリップが発生したものとは判断されない。また、このような制御指令値をもとに第3の状態量および第4の状態量を算出すれば、このような場合、第1の状態量と第2の状態量との比を示す第1のスティックスリップ指標SSpvは、第3の状態量と第4の状態量との比を示す第2のスティックスリップ指標SSspよりも大きいものとなる(SSpv>SSsp)。
【0044】
一方、スティックスリップが発生している場合、変位検出部11で検出されて出力される変位信号は、図2に実線IIで示されるような階段状のものとなる。このような変位信号が検出されると、異常診断部16では、スティックスリップが発生しているものと判断する。この場合も、第1の状態量と第2の状態量との比を示す第1のスティックスリップ指標SSpvは、第3の状態量と第4の状態量との比を示す第2のスティックスリップ指標SSspよりも大きいものとなる(SSpv>SSsp)。
【0045】
以上の場合に対し、図3に点線IIIで示されるような変位の制御指令値が与えられる場合について考える。このような制御指令値が与えられると、弁軸が正常に動作しても、変位検出部11で検出される変位信号は、図3に実線IVで示されるものとなる。このような状態では、異常診断部16では、スティックスリップが発生しているものと判断してしまう。ここで、制御指令値をもとに第3の状態量および第4の状態量を算出すれば、第3の状態量と第4の状態量との比を示す第2のスティックスリップ指標SSspは、第1の状態量と第2の状態量との比を示す第1のスティックスリップ指標SSpv以上となる(SSsp≧SSpv)。
【0046】
従って、制御指令値による第2のスティックスリップ指標SSspが変位による第1のスティックスリップ指標SSpv以上となったことを検出した場合(SSsp≧SSpv)に異常診断部16の判断動作を停止することで、換言すればSSpv>SSspである場合にのみ異常診断部16の判断動作を許可することにより、スティックスリップの誤判断が抑制できるようになる。
【0047】
しかし、SSpv>SSspとしただけでは、特許文献2に示された技術と同じであり、スティックスリップの誤検出を高精度で抑制することはできない。そこで、本実施の形態では、α,βを調整パラメータとして導入し、異常判断部30において、SSpv>α・SSsp+βである場合にのみ、異常診断部16の判断動作を許可するようにする。これは、動作制御部25が、SSpv≦α・SSsp+βである場合に、診断部10における異常診断部16の判断動作を停止させることによって実現される。
【0048】
この場合、異常判断部30において、下記(4)式で示されるなる条件式を満足した場合に、スティックスリップが発生したものと判断される。なお、この条件式において、α=1,β=0にすると、特許文献2と同じとなる。このため、本発明において、α=1,β=0の場合は除くものとした。
SSpv> Th AND SSpv>α・SSsp+β ・・・・(4)
【0049】
〔学習処理(学習によるαとβの調整)〕
調整パラメータであるα,βを求めるためには、工場出荷時の検査運転中、あるいはプロセス制御中に、次のような学習処理を行う
【0050】
(1)スティックスリップの起きていない正常な状態で、変位によるスティックスリップ指標SSpv、制御指令値によるスティックスリップ指標SSspを算出する。
(2)図4に示すスティックスリップ指標平面上に、(1)で算出した変位によるスティックスリップ指標SSpvと制御指令値によるスティックスリップ指標SSspとをプロットする。図4中、○印は、スティックスリップ指標のプロット点である。
(3)(2)でプロットされた状態を誤検出しないように、アラーム発報の境界線とされる直線Xの傾きαと切片βを定める。
(4)このようにして定めたα,βを上記(4)式に設定する。
【0051】
ここで、直線Xの傾きαと切片βを定める方法としては、幾つかのバリエーションが考えられる。例えば、βを0に固定し、αのみを誤検出率が零になるまで大きくしてもよいし、逆にαを固定し、βを誤検出率が零になるまで大きくしてもよい。
【0052】
なお、実際にスティックスリップが起きているときのデータが入手できれば、誤検出率をなるべく低く抑えつつ、同時に検出率(正解率)を高めるような学習も可能となる。例えば、線形判別分析などによってαとβを定めればよい。また、サポートベクターマシンのような非線形判別の手法を適用してもよい。図5にその模式図を示す。
【0053】
図5では、制御指令値によるスティックスリップ指標SSspと変位によるスティックスリップ指標SSpvがともに閾値Thとなる点を支点に直線Xの傾きを変えて、スティックスリップの検出範囲(アラーム発報領域)を調整している。なお、図5において、○印は正常な状態でのスティックスリップ指標のプロット点であり、×印は異常な状態でのスティックスリップ指標のプロット点である。
【0054】
図6はある機種のコントロールバルブに対して、様々な条件でスティックスリップ指標を計算した結果をプロットしたものである。「異常(●印)」はスティックスリップが起こる力をバルブステムに加えた場合のデータである。「正常(○印)」ではバルブステムに力をかけておらず、スティックスリップは起こっていない。
【0055】
図6の例では、制御指令値が大きい場合に、正常と異常とが混在している。ここで、誤検出抑制を重視するならば、例えば図7に実線の直線X1で示すように、上記(4)式中の「SSpv>α・SSsp+β」において、αを1、βをSSpv−10と置けばよい。すなわち、「SSpv>α・SSsp+β」を「10>SSsp」とすればよい。なお、この場合、異常であるのに検出できないリスクは残る。また、異常見逃し抑制を重視するならば、図7中に点線の直線X2で示すように、傾きαを小さくし、閾値Thの直線に近づけるようにすればよい。なお、この場合、正常を異常と誤検出するリスクはある。
【0056】
なお、上述した実施の形態では、第1の状態量および第3の状態量として1階差分値の絶対値の平均を算出し、第2の状態量および第4の状態量として1階差分値の2乗平均の平方根を算出したが、これに限られるものではない。例えば、第1の状態量および第3の状態量として1階差分値の2乗平均を算出し、第2の状態量および第4の状態量として2階差分値の2乗平均を算出するようにしてもよい。
【0057】
また、上述したスティックスリップ検出は、検出された変位をコンピュータで処理することでスティックスリップを検出するようにしてもよい。例えば、コンピュータを構成するCPUがバスを介して接続されているメモリに展開されているプログラムにより動作することで、得られた変位信号を処理して診断結果を出力し、また、得られた制御指令値より診断結果を得る処理を停止してもよい。
【0058】
ここで、上記プログラムは、前述した各実施の形態で説明したスティックスリップ検出の処理を、CPU(コンピュータ)に行わせるものである。また、メモリに展開されているプログラムは、バスを介して外部接続される外部記憶装置に格納されているものを取り込んで展開すればよい。外部記憶装置としては、例えば、磁気ディスク記憶装置などがある。
【0059】
〔実施の形態の拡張〕
以上、実施の形態を参照して本発明を説明したが、本発明は上記実施の形態に限定されるものではない。本発明の構成や詳細には、本発明の技術的範囲内で当業者が理解しうる様々な変更をすることができる。
【符号の説明】
【0060】
10…診断部、11…変位検出部、12…第1の状態量算出部、13…第2の状態量算出部、14…第1のスティックスリップ指標算出部、15…閾値記憶部、16…異常診断部、20…診断動作制御部、21…制御指令受信部、22…第3の状態量算出部、23…第4の状態量算出部、24…第2のスティックスリップ指標算出部、25…動作制御部、30…異常判断部。
【特許請求の範囲】
【請求項1】
接触摺動部を有する可動部の変位を検出する変位検出手段と、
前記変位より第1の状態量を算出する第1の状態量算出手段と、
前記変位より第2の状態量を算出する第2の状態量算出手段と、
前記第1の状態量と前記第2の状態量との比を変位による第1のスティックスリップ指標として算出する第1のスティックスリップ指標算出手段と、
前記可動部の変位を制御する制御指令値を受信する制御指令受信手段と、
前記制御指令値より第3の状態量を算出する第3の状態量算出手段と、
前記制御指令値より第4の状態量を算出する第4の状態量算出手段と、
前記第3の状態量と前記第4の状態量との比を制御指令値による第2のスティックスリップ指標として算出する第2のスティックスリップ指標算出手段と、
前記第1のスティックスリップ指標をSSpv、前記第2のスティックスリップ指標をSSsp、閾値をTh、第1の定数をα、第2の定数をβとした時、下記(1)式で示される条件式を満足した場合に、前記可動部の異常と判断する異常判断手段と
を備えることを特徴とするスティックスリップ検出装置。
SSpv> Th AND SSpv>α・SSsp+β ・・・・(1)
但し、(1)式において、α=1,β=0の場合は除く。
【請求項2】
請求項1に記載されたスティックスリップ検出装置において、
前記第1および第2のスティックスリップ指標の正常状態での関係を学習するスティックスリップ指標学習手段と、
前記学習された第1および第2のスティックスリップ指標の正常状態での関係に基づいて定められた前記第1の定数αおよび前記第2の定数βを前記(1)式に対して設定する定数設定手段と
を備えることを特徴とするスティックスリップ検出装置。
【請求項3】
請求項1に記載されたスティックスリップ検出装置において、
前記第1および第2のスティックスリップ指標の正常状態と異常状態での関係を学習するスティックスリップ指標学習手段と、
前記学習された第1および第2のスティックスリップ指標の正常状態と異常状態での関係に基づいて、誤検出抑制を重視するか異常見逃し抑制を重視するかを判断基準として定められた前記第1の定数αおよび前記第2の定数βを前記(1)式に対して設定する定数設定手段と
を備えることを特徴とするスティックスリップ検出装置。
【請求項4】
接触摺動部を有する可動部の変位を検出するステップと、
前記変位より第1の状態量を算出するステップと、
前記変位より第2の状態量を算出するステップと、
前記第1の状態量と前記第2の状態量との比を変位による第1のスティックスリップ指標として算出するステップと、
前記可動部の変位を制御する制御指令値を受信するステップと、
前記制御指令値より第3の状態量を算出するステップと、
前記制御指令値より第4の状態量を算出するステップと、
前記第3の状態量と前記第4の状態量との比を制御指令値による第2のスティックスリップ指標として算出するステップと、
前記第1のスティックスリップ指標をSSpv、前記第2のスティックスリップ指標をSSsp、閾値をTh、第1の定数をα、第2の定数をβとした時、下記(2)式で示される条件式を満足した場合に、前記可動部の異常と判断するステップと
を備えることを特徴とするスティックスリップ検出方法。
SSpv> Th AND SSpv>α・SSsp+β ・・・・(2)
但し、(2)式において、α=1,β=0の場合は除く。
【請求項5】
請求項4に記載されたスティックスリップ検出方法において、
前記第1および第2のスティックスリップ指標の正常状態での関係を学習するステップと、
前記学習された第1および第2のスティックスリップ指標の正常状態での関係に基づいて定められた前記第1の定数αおよび前記第2の定数βを前記(2)式に対して設定するステップと
を備えることを特徴とするスティックスリップ検出方法。
【請求項6】
請求項4に記載されたスティックスリップ検出方法において、
前記第1および第2のスティックスリップ指標の正常状態と異常状態での関係を学習するステップと、
前記学習された第1および第2のスティックスリップ指標の正常状態と異常状態での関係に基づいて、誤検出抑制を重視するか異常見逃し抑制を重視するかを判断基準として定められた前記第1の定数αおよび前記第2の定数βを前記(2)式に対して設定するステップと
を備えることを特徴とするスティックスリップ検出方法。
【請求項1】
接触摺動部を有する可動部の変位を検出する変位検出手段と、
前記変位より第1の状態量を算出する第1の状態量算出手段と、
前記変位より第2の状態量を算出する第2の状態量算出手段と、
前記第1の状態量と前記第2の状態量との比を変位による第1のスティックスリップ指標として算出する第1のスティックスリップ指標算出手段と、
前記可動部の変位を制御する制御指令値を受信する制御指令受信手段と、
前記制御指令値より第3の状態量を算出する第3の状態量算出手段と、
前記制御指令値より第4の状態量を算出する第4の状態量算出手段と、
前記第3の状態量と前記第4の状態量との比を制御指令値による第2のスティックスリップ指標として算出する第2のスティックスリップ指標算出手段と、
前記第1のスティックスリップ指標をSSpv、前記第2のスティックスリップ指標をSSsp、閾値をTh、第1の定数をα、第2の定数をβとした時、下記(1)式で示される条件式を満足した場合に、前記可動部の異常と判断する異常判断手段と
を備えることを特徴とするスティックスリップ検出装置。
SSpv> Th AND SSpv>α・SSsp+β ・・・・(1)
但し、(1)式において、α=1,β=0の場合は除く。
【請求項2】
請求項1に記載されたスティックスリップ検出装置において、
前記第1および第2のスティックスリップ指標の正常状態での関係を学習するスティックスリップ指標学習手段と、
前記学習された第1および第2のスティックスリップ指標の正常状態での関係に基づいて定められた前記第1の定数αおよび前記第2の定数βを前記(1)式に対して設定する定数設定手段と
を備えることを特徴とするスティックスリップ検出装置。
【請求項3】
請求項1に記載されたスティックスリップ検出装置において、
前記第1および第2のスティックスリップ指標の正常状態と異常状態での関係を学習するスティックスリップ指標学習手段と、
前記学習された第1および第2のスティックスリップ指標の正常状態と異常状態での関係に基づいて、誤検出抑制を重視するか異常見逃し抑制を重視するかを判断基準として定められた前記第1の定数αおよび前記第2の定数βを前記(1)式に対して設定する定数設定手段と
を備えることを特徴とするスティックスリップ検出装置。
【請求項4】
接触摺動部を有する可動部の変位を検出するステップと、
前記変位より第1の状態量を算出するステップと、
前記変位より第2の状態量を算出するステップと、
前記第1の状態量と前記第2の状態量との比を変位による第1のスティックスリップ指標として算出するステップと、
前記可動部の変位を制御する制御指令値を受信するステップと、
前記制御指令値より第3の状態量を算出するステップと、
前記制御指令値より第4の状態量を算出するステップと、
前記第3の状態量と前記第4の状態量との比を制御指令値による第2のスティックスリップ指標として算出するステップと、
前記第1のスティックスリップ指標をSSpv、前記第2のスティックスリップ指標をSSsp、閾値をTh、第1の定数をα、第2の定数をβとした時、下記(2)式で示される条件式を満足した場合に、前記可動部の異常と判断するステップと
を備えることを特徴とするスティックスリップ検出方法。
SSpv> Th AND SSpv>α・SSsp+β ・・・・(2)
但し、(2)式において、α=1,β=0の場合は除く。
【請求項5】
請求項4に記載されたスティックスリップ検出方法において、
前記第1および第2のスティックスリップ指標の正常状態での関係を学習するステップと、
前記学習された第1および第2のスティックスリップ指標の正常状態での関係に基づいて定められた前記第1の定数αおよび前記第2の定数βを前記(2)式に対して設定するステップと
を備えることを特徴とするスティックスリップ検出方法。
【請求項6】
請求項4に記載されたスティックスリップ検出方法において、
前記第1および第2のスティックスリップ指標の正常状態と異常状態での関係を学習するステップと、
前記学習された第1および第2のスティックスリップ指標の正常状態と異常状態での関係に基づいて、誤検出抑制を重視するか異常見逃し抑制を重視するかを判断基準として定められた前記第1の定数αおよび前記第2の定数βを前記(2)式に対して設定するステップと
を備えることを特徴とするスティックスリップ検出方法。
【図1】

【図2】

【図3】
【図4】

【図5】

【図6】

【図7】

【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2013−104666(P2013−104666A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2011−246248(P2011−246248)
【出願日】平成23年11月10日(2011.11.10)
【出願人】(000006666)アズビル株式会社 (1,808)
【Fターム(参考)】
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年11月10日(2011.11.10)
【出願人】(000006666)アズビル株式会社 (1,808)
【Fターム(参考)】
[ Back to top ]