
ステレオカメラシステム及び該システムを備える車両
【課題】外部の物体を利用することなく、簡単な構成にて、画像データの位置補正処理を高精度にて行う、汎用性の高いステレオカメラシステム及び該システムを備える車両を提供する。
【解決手段】ステレオカメラシステム(100)は、第1カメラ(20a)、第2カメラ(20b)、及び、基台(30)からなるステレオカメラユニット(70)と、第1カメラ(20a)及び第2カメラ(20b)が出力する第1画像データ及び第2画像データの少なくとも一方に、位置補正処理を行う制御装置(40)とを備える。第1カメラ(20a)及び第2カメラ(20b)の視野に、ステレオカメラユニット(70)の一部がそれぞれ含まれ、制御装置(40)は、第1画像データ及び第2画像データに含まれるステレオカメラユニット(70)の一部の画像に対応するデータに基づいて位置補正処理を行う。
【解決手段】ステレオカメラシステム(100)は、第1カメラ(20a)、第2カメラ(20b)、及び、基台(30)からなるステレオカメラユニット(70)と、第1カメラ(20a)及び第2カメラ(20b)が出力する第1画像データ及び第2画像データの少なくとも一方に、位置補正処理を行う制御装置(40)とを備える。第1カメラ(20a)及び第2カメラ(20b)の視野に、ステレオカメラユニット(70)の一部がそれぞれ含まれ、制御装置(40)は、第1画像データ及び第2画像データに含まれるステレオカメラユニット(70)の一部の画像に対応するデータに基づいて位置補正処理を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ステレオカメラシステム及び該システムを備える車両に関する。
【背景技術】
【0002】
ステレオカメラシステムは、例えば車両に取り付けられ、車両前方の障害物までの距離を測定するのに使用されている。
ステレオカメラシステムは、2台のカメラによって得られた2つの画像の視差を利用して距離を算出する。このため、2台のカメラ間の相対的な位置関係にずれがあると、正しい距離を求めることができない。また、当初、2台のカメラ間の相対的な位置関係にずれが無いとしても、部品の経時的な変形等によりずれが生じてしまう。
【0003】
そこで、ステレオカメラシステムでは、カメラ間の相対的な位置関係のずれを、機械的にではなく、情報処理技術によって補正することが行われている。
例えば、特許文献1が開示するステレオカメラシステムでは、2台のカメラ間の位置姿勢を規定するキャリブレーションパラメータのずれに基づくキャリブレーションずれが、既知特徴又は自然特徴を用いて補正される。
【0004】
既知特徴は、ある座標系で相対位置が特定されている特徴であり、例えば車両の場合には、ナンバープレートの4つのコーナーや、車両のボンネット上で形状が変化している点や、フロントガラスに配置した黒丸のマーカである。
自然特徴は、撮影された画像内から抽出される特徴であり、自然特徴間の幾何学的距離等の性質は、予め既知ではない。
【0005】
特許文献1が開示するキャリブレーションずれ補正方法によれば、撮影画像から既知特徴又は自然特徴が抽出され、既知特徴又は自然特徴に対応する制約式が求められる。そして、制約式、計測誤差共分散行列、及び、カルマンゲインに基づいて、キャリブレーションパラメータの推定平均値及び推定誤差共分散行列の更新が行われる。推定誤差共分散行列が示す個々のパラメータの分散が小さくなることで、ずれが補正されたキャリブレーションパラメータが得られる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2004−354257号公報(例えば、段落番号0130〜0200、図8、及び、図9等)
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1が開示するキャリブレーションずれ補正方法において、既知特徴を用いる場合、既知特徴間の幾何学的距離を予め入力しなければならない。車両のボンネット上で形状が変化している点のように、車種に固有の特徴を既知特徴として用いる場合、車種毎に異なる幾何学的距離を入力しなければならず、補正のための準備作業が煩雑である。
【0008】
一方、特許文献1が開示するキャリブレーションずれ補正方法において、自然特徴を用いた場合、既知特徴を用いる場合に比べて拘束条件が少ないため、制約式が複雑である。このため、既知特徴を用いる場合に比べて、計算が複雑であり、補正の精度が低下する虞がある。
【0009】
本発明は上記した事情に鑑みてなされ、その目的とするところは、外部の物体を利用することなく、簡単な構成にて、画像データの位置補正処理を高精度にて行う、汎用性の高いステレオカメラシステム及び該システムを備える車両を提供することにある。
【課題を解決するための手段】
【0010】
上記の課題を解決するため、本発明は以下の解決手段を採用する。
解決手段1:本発明の一態様によれば、第1カメラ、第2カメラ、並びに、第1カメラ及び第2カメラが設置される基台を有するステレオカメラユニットと、前記第1カメラが出力する第1画像データ及び前記第2カメラが出力する第2画像データの少なくとも一方に位置補正処理を行ったうえで、前記第1画像データ及び第2画像データに基づき、前記第1画像データ及び前記第2画像データ中の物体の距離を判定する制御装置とを備えるステレオカメラシステムであって、前記第1カメラ及び前記第2カメラの視野に、前記ステレオカメラユニットの一部がそれぞれ含まれ、前記制御装置は、前記第1画像データ及び前記第2画像データに含まれる前記ステレオカメラユニットの一部の画像に対応するデータに基づいて前記位置補正処理を行うことを特徴とするステレオカメラシステムが提供される。
【0011】
解決手段1のステレオカメラシステムでは、第1カメラ及び第2カメラの視野に、ステレオカメラユニットの一部がそれぞれ含まれ、第1画像データ及び第2画像データに含まれるステレオカメラユニットの一部の画像に対応するデータに基づいて位置補正処理が行われる。
このステレオカメラシステムは、外部の物体を位置補正処理に使用しないので、位置補正処理に用いられる物体の幾何学的情報を、使用環境に応じて変更する必要がない。
一方、ステレオカメラユニットの一部の幾何学的情報は既知であり、外部の物体を位置補正処理に用いる場合と同様に、高精度にて位置補正処理が実行される。
【0012】
解決手段2:好ましくは、前記第1カメラの視野に、前記ステレオカメラユニットの一部として前記第2カメラの一部が含まれ、前記第2カメラの視野に、前記ステレオカメラユニットの一部として前記第1カメラの一部が含まれ、前記制御装置は、前記第1画像データに含まれる前記第2カメラの一部の画像に対応するデータに基づき、前記第1画像データに位置補正処理を行い、前記第2画像データに含まれる前記第1カメラの一部の画像に対応するデータに基づき、前記第2画像データに位置補正処理を行う。
【0013】
解決手段2のステレオカメラシステムでは、第1画像データに含まれる第2カメラの一部の画像に対応するデータに基づき、第1画像データに位置補正処理が行われ、第2画像データに含まれる第1カメラの一部の画像に対応するデータに基づき、第2画像データに位置補正処理が行われる。
従って、第2カメラに対する第1カメラの位置関係のずれ、及び、第2カメラに対する第1カメラの位置関係のずれが直接的且つ確実に把握され、位置補正処理がより高精度にて行われる。
【0014】
解決手段3:好ましくは、前記第1カメラ及び前記第2カメラのうち少なくとも一方の筐体には、他方のカメラの視野に含まれる部位に、前記筐体とは輝度の異なるキャリブレーションマークが付与されている。
解決手段3のステレオカメラシステムでは、筐体とは輝度の異なるキャリブレーションマークを用いることによって、第1カメラ及び第2カメラの筐体の色や形状に関係なく、位置補正処理が高精度にて行われる。
【0015】
解決手段4:好ましくは、前記第1カメラ及び第2カメラの画角は180°を超えている。
解決手段4のステレオカメラシステムでは、第1カメラ及び第2カメラの画角が180°を超えていることによって、簡単な構成にて、第1カメラ及び第2カメラの視野に、他方の一部が含まれる。
【0016】
解決手段5:好ましくは、前記制御装置は、外部からの命令に基づいて、前記位置補正処理に使用される補正用パラメータを前記ステレオカメラユニットの一部の画像に対応するデータに基づいて演算する。
【0017】
解決手段5のステレオカメラシステムでは、外部からの命令に応じて、いつでも、位置補正処理に使用される補正用パラメータが演算される。つまり、補正用パラメータは適宜更新可能である。このため、第1カメラと第2カメラの間の相対的な位置関係に経時的にずれが生じたとしても、高精度にて位置補正処理が行われる。
【0018】
解決手段6:本発明の他の態様によれば、解決手段5に記載のステレオカメラシステムを備える車両であって、前記外部からの命令は、人によって入力されるか、前記車両のエンジンの起動に連動して入力されるか、又は、前記車両のギアの変更に連動して入力されることを特徴とする車両が提供される。
【0019】
解決手段6の車両によれば、人からの命令によって補正用パラメータを演算させられる。このため、必要なときにいつでも位置補正処理が行われ、ステレオカメラシステムが直ぐに使用に供される。あるいは、エンジンの起動時又はギアの変更時に補正用パラメータが演算されることにより、常に、高精度にて位置補正処理が行われる。
【発明の効果】
【0020】
本発明によれば、外部の物体を利用することなく、簡単な構成にて、画像データの位置補正処理を高精度にて行う、汎用性の高いステレオカメラシステム及び該システムを備える車両が提供される。このステレオカメラシステムによれば、物体までの距離の測定が高精度にて行われ、該システムを備える車両では、安全運転が実現される。
【図面の簡単な説明】
【0021】
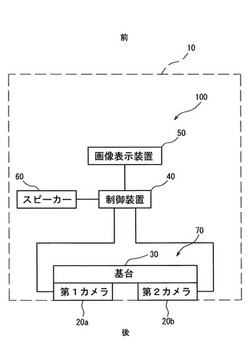
【図1】車両に適用された一実施形態に係るステレオカメラシステムの構成を概略的に示すブロック図である。
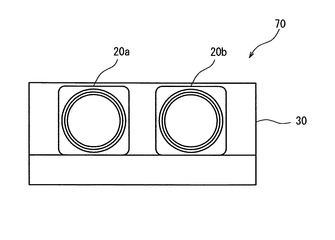
【図2】図1のステレオカメラシステムに適用されたステレオカメラユニットの概略的な正面図である。
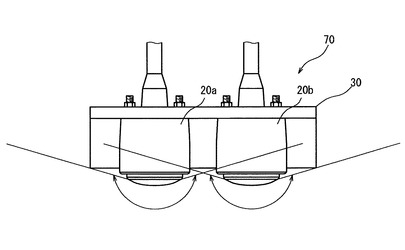
【図3】図2のステレオカメラユニットの概略的な上面図である。
【図4】図2のステレオカメラユニットを構成する第1カメラ及び第2カメラによって撮影される画像を概略的に示す図である。
【図5】図1のステレオカメラシステムの制御装置が実行する後方監視用プログラムを概略的に示すフローチャートである。
【図6】図1のステレオカメラシステムの制御装置が実行する第1画像のための補正用パラメータ決定プログラムを概略的に示すフローチャートである。
【図7】図1のステレオカメラシステムの制御装置が実行する第2画像のための補正用パラメータ決定プログラムを概略的に示すフローチャートである。
【図8】図6及び図7中のロール角補正用パラメータ決定ルーチンを概略的に示すフローチャートである。
【図9】図6及び図7中のピッチ角補正用パラメータ決定ルーチンを概略的に示すフローチャートである。
【図10】図6及び図7中のヨー角補正用パラメータ決定ルーチンを概略的に示すフローチャートである。
【図11】変形例に係る第1カメラ及び第2カメラを概略的に示す斜視図である。
【図12】図11の第1カメラ及び第2カメラによって撮影される画像を概略的に示す図である。
【図13】変形例に係るステレオカメラユニットを示す概略的な上面図である。
【図14】変形例に係るステレオカメラシステムの概略的な構成を示すブロック図である。
【発明を実施するための形態】
【0022】
以下、本発明の実施形態について図面を参照しながら説明する。
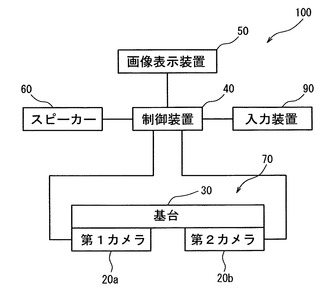
図1は、車両10に適用された一実施形態のステレオカメラシステム100の概略的な構成を示している。
ステレオカメラシステム100は、第1カメラ20a、第2カメラ20bb、基台30、制御装置40、画像表示装置50、及び、必要に応じてスピーカー60を有する。
【0023】
〔カメラ〕
第1カメラ20a及び第2カメラ20bは、撮像素子を有するデジタルカメラであり、撮影範囲に対応するデジタルの第1画像データ及び第2画像データをそれぞれ生成する。
図2に示したように、第1カメラ20a及び第2カメラ20bは、互いに平行になるように基台30に固定され、基台30が車両に固定される。第1カメラ20a、第2カメラ20b、及び、基台30は、1つのステレオカメラユニット70を構成している。
【0024】
基台30は、例えば、第1カメラ20a及び第2カメラ20bが、車両の後方を向くように配置される。つまり、本実施形態では、ステレオカメラシステム100は、車両後方を監視するために用いられる。具体的には、基台30は、車両10のトランクリッド若しくはリアゲート、リアバンパー周辺、又は、車両10の天井等に取り付けられる。基台30は、車両10の幅方向では、略中央に取り付けられる。
【0025】
基台30は、例えば断面L字形状の金属製のブラケットであり、基台30に対し、第1カメラ20a及び第2カメラ20bは、ボルト若しくは螺子等を用いて固定されている。また、基台30は、車両10に対し、ボルト若しくは螺子等を用いて固定されている。
【0026】
図3に示したように、第1カメラ20a及び第2カメラ20bの画角は180°を超えており、例えば190°である。画角で分類すれば、第1カメラ20a及び第2カメラ20bは、超広角又は魚眼カメラである。第1カメラ20a及び第2カメラ20bの各々の画角は、隣の第2カメラ20b及び第1カメラ20aの画像を位置補正処理に利用する場合は180°以上であることが望ましい。
【0027】
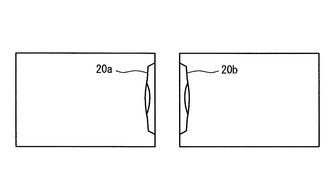
第1カメラ20a及び第2カメラ20bは互いに平行に配置されている。図4の右側は、第1カメラ20aによってそれぞれ取得された第1画像データを表示したものであり、図4の左側は、第2カメラ20bによって取得された第2画像データを示している。
図4に示したように、第1カメラ20aの視野には、第2カメラ20bの一部が含まれており、第2カメラ20bの視野には、第1カメラ20aの一部が含まれている。
なお、図4では、第2カメラ20b及び第1カメラ20aの一部の画像のみを示し、他の画像は省略した。
【0028】
〔制御装置〕
制御装置40は、例えば、マイクロコンピュータによって構成され、CPU(中央演算処理装置)及びメモリ等を含む。制御装置40は、第1カメラ20a及び第2カメラ20bに電気的に接続されており、第1カメラ20aによって撮影された画像のデータ(第1画像データ)及び第2カメラ20bによって撮影された画像のデータ(第2画像データ)を読み込む。
【0029】
そして制御装置40は、読み込んだ第1画像データ及び第2画像データに、位置補正処理を実行した上で、第1画像データ及び第2画像データのうち例えば第1画像データを画像表示装置50に表示させる。画像表示装置50は、例えば、液晶ディスプレイであり、車両10のインストルメントパネル(ダッシュボード)の中央に設置される。なお、画像データを表示させるとは、画像データに対応する画像を表示させるということである。
【0030】
一方、制御装置40は、第1画像データ及び第2画像データに障害物が写っている場合には、位置補正処置が施された第1画像データと第2画像データの間における、障害物の視差を利用して、障害物までの距離を測定する。そして、障害物までの距離に応じて、即ち危険度に応じて、スピーカー60に警報音を発生させる。
また、制御装置40は、警報表示として、例えば、障害物を囲む赤枠を画像表示装置50に表示させる。
【0031】
ここで、位置補正処理では、第1カメラ20aと第2カメラ20bの間の相対的な位置関係のずれに基づく、第1画像データ及び第2画像データの回転が補正される。即ち、第1カメラ20a及び第2カメラ20bは、互いに平行になるように機械的に固定されるが、寸法公差や、経時的な部品の変形等によって、現実には平行からずれてしまう。
そして、このずれに起因して、第1画像データ及び第2画像データが回転してしまう。なお、第1画像データ及び第2画像データが回転するとは、第1画像データ及び第2画像データの画像が回転するということである。
【0032】
具体的には、第1画像データ及び第2画像データの回転には、第1カメラ20a及び第2カメラ20bの各々の光軸の回りでのロール、第1カメラと第2カメラの離間方向に平行な軸の回りでのピッチ、及び、光軸及び第1カメラと第2カメラの離間方向に直交する軸の回りでのヨーがある。
【0033】
制御装置40は、第1画像データ及び第2画像データの各々のロールを補正するためのロール角補正用パラメータθr、ピッチを補正するためのピッチ角補正用パラメータθp、及び、ヨーを補正するためのヨー角補正用パラメータθyを決定し、決定したロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθyを用いて、第1画像データ及び第2画像データの各々を回転させる位置補正処理を行う。
【0034】
具体的には、制御装置40は、第1画像データのためのロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθyを決定する場合、変化量Δθr,Δθp,Δθrだけ異なる、複数組のロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθyの候補値を用いて第1画像データを回転させ、各回転後の第1画像データに含まれる第2カメラ20bの筐体の形状に対応する判定用データを、予め入力された基準データと比較する。
【0035】
そして、判定用データと基準データとの差が閾値よりも小さくなったときのロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθyの組を、位置補正処理用のロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθyに設定する。
【0036】
同様に、制御装置40は、第2画像データのためのロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθyを決定する場合、変化量Δθr,Δθp,Δθrだけ異なる、複数組のロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθyの候補値を用いて第2画像データを回転させ、各回転後の第2画像データに含まれる第1カメラ20aの筐体の形状に対応する判定用データを、予め入力された基準データと比較する。
【0037】
そして、判定用データと基準データとの差が閾値よりも小さくなったときのロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθyの組を、位置補正処理用のロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθyに設定する。
【0038】
〔後方監視用プログラム〕
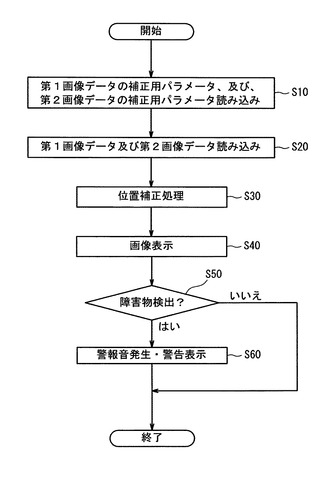
以下、上述した一実施形態のステレオカメラシステム100の動作について、説明する。図5は、制御装置40が実行する、後方監視用のプログラムを概略的に示すフローチャートである。後方監視用のプログラムは、例えば、車両10のギアがバックギアに設定されたときに実行される。
【0039】
具体的には、制御装置40は、初期設定として、第1画像データ及び第2画像データの各々のためのロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθyを読み込む(ステップS10)。
【0040】
それから、制御装置40は、第1カメラ20a及び第2カメラ20bによって取得された第1画像データ及び第2画像データを読み込む(ステップS20)。そして、制御装置40は、読み込んだ第1画像データ及び第2画像データの各々に対し、ステップS10で読み込んだロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθyを用いて、位置補正処理を施す(ステップS30)。
【0041】
この後、制御装置40は、第1画像データ及び第2画像データのうち例えば第1画像データを画像表示装置50に表示させる(ステップS40)。また、制御装置40は、位置補正処理が施された第1画像データ及び第2画像データ中に障害物が存在するか否か判定する(ステップS50)。そして、障害物が存在すれば、障害物までの距離を測定し、必要に応じてスピーカー60に警報音を発生させるとともに、画像表示装置50に警報を表示させる(ステップS60)。
かくして制御装置40は、ギアがバックギアに設定されている間、上述したステップS10〜S50及び必要に応じてS60を繰り返し実行する。
【0042】
次に、制御装置40が実行する、第1画像データ及び第2画像データのためのロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθyを決定する補正用パラメータ決定プログラムについて説明する。
【0043】
〔第1画像のための補正用パラメータ決定プログラム〕
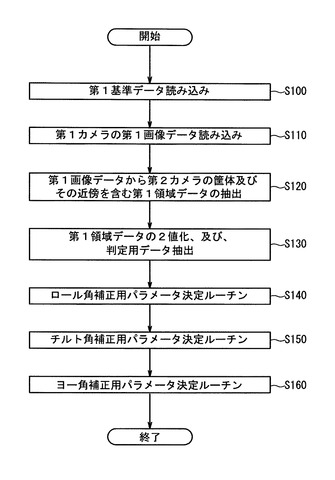
図6は、第1画像データのための補正用パラメータ決定プログラムを概略的に示すフローチャートである。補正用パラメータ決定プログラムは、例えば、車両10のエンジンが起動されると実行される。
【0044】
第1画像データのための補正用パラメータ決定プログラムでは、まず制御装置40が、初期設定として、第1基準データを読み込む(ステップS100)。第1基準データは、第1カメラ20aが第2カメラ20bに対して理想的に平行であるときに、第1画像データに含まれる第2カメラ20bの筐体の外形形状に対応するデータである。なお第1基準データは、予め適当なときに、制御装置40に記憶させられる。
【0045】
次に、制御装置40は、第1カメラ20aに撮影を実行させ、第1画像データを読み込む(ステップS110)。
そして、制御装置40は、第1画像データから、第2カメラ20bの筐体及び筐体の近傍が写っている領域のデータ(第1領域データ)を抽出する(ステップS120)。第1領域データの抽出は、第2カメラ20bの筐体が外れていなければよく、例えば、図4の右側の画像のうち、左端側のデータが第1領域データとして抽出される。
【0046】
この後、制御装置40は、第1領域データを輝度に基づいて2値化し、2値化された第1領域データから、低輝度の領域のデータ(判定用データ)を抽出する(ステップS130)。第2カメラ20bの筐体の色は、通常、黒色等の低輝度の色であるため、判定用データは、第2カメラ20bの筐体の外形形状に対応する。
【0047】
それから、制御装置40は、ロール角補正用パラメータ決定ルーチン(ステップS140)、ピッチ角補正用パラメータ決定ルーチン(ステップS150)、及び、ヨー角補正用パラメータ決定ルーチン(ステップS160)を順次、若しくは、並列的に実行し、第1画像のためのロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθyを決定する。
【0048】
〔第2画像のための補正用パラメータ決定プログラム〕
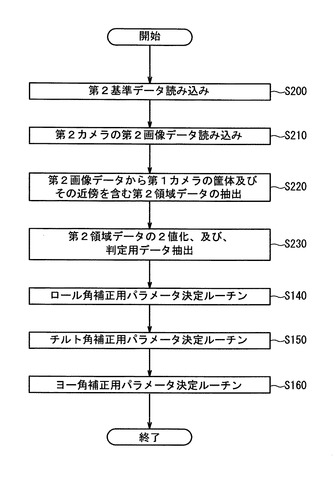
図7は、第2画像データのための補正用パラメータ決定プログラムを概略的に示すフローチャートである。第2画像データのための補正用パラメータ決定プログラムも、例えば、車両10のエンジンが起動されると実行される。
【0049】
第2画像データのための補正用パラメータ決定プログラムでは、まず制御装置40が、初期設定として、第2基準データを読み込む(ステップS200)。第2基準データは、第2カメラ20bが第1カメラ20aに対して理想的に平行であるときに、第2画像データに含まれる第1カメラ20aの筐体の外形形状に対応するデータである。なお第2基準データは、予め適当なときに、制御装置40に記憶させられる。
【0050】
次に、制御装置40は、第2カメラ20bに撮影を実行させ、第2画像データを読み込む(ステップS210)。
そして、制御装置40は、第2画像データから、第1カメラ20aの筐体及び筐体の近傍が写っている領域のデータ(第2領域データ)を抽出する(ステップS220)。第2領域データの抽出は、第1カメラ20aの筐体が外れていなければよく、例えば、図4の左側の画像のうち、右端側のデータが第2領域データとして抽出される。
【0051】
この後、制御装置40は、第2領域データを輝度に基づいて2値化し、2値化された第2領域データから、低輝度の領域のデータ(判定用データ)を抽出する(ステップS230)。第1カメラ20aの筐体の色は、通常、黒色等の低輝度の色であるため、判定用データは、第1カメラ20aの筐体の外形形状に対応する。
【0052】
それから、制御装置40は、ロール角補正用パラメータ決定ルーチン(ステップS140)、ピッチ角補正用パラメータ決定ルーチン(ステップS150)、ヨー角補正用パラメータ決定ルーチン(ステップS160)を順次、若しくは、並列的に実行し、第2画像のためのロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθyを決定する。
【0053】
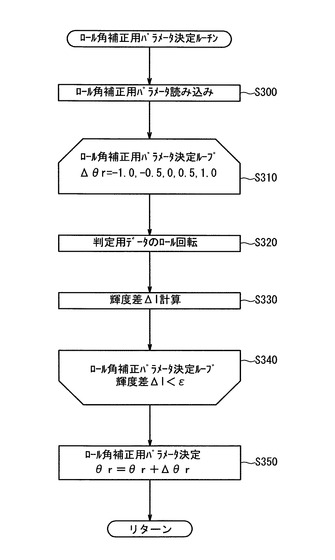
〔ロール角補正用パラメータ決定ルーチン〕
図8は、ロール角補正用パラメータ決定ルーチンS140の内容を概略的に示すフローチャートである。
図8に示したように、ロール角補正用パラメータ決定ルーチンS140では、まず制御装置40は、現在のロール角補正用パラメータθrを読み込む(ステップS300)。初めてロール角補正用パラメータ決定ルーチンS140を行うときには、現在のロール角補正用パラメータθrは、予め設定された適当な初期値である。
【0054】
それから、制御装置40は、ロール角補正用パラメータ決定ループS310を実行する。
ロール角補正用パラメータ決定ループS310では、変数は、ロール角補正用パラメータθrであり、変数の初期値としては、例えば、現在のロール角補正用パラメータθrが用いられる。変数の増分、即ち変化量Δθrは、例えば−1.0°,−0.5°,0.5°,1.0°である。なお、初期値も含めると、変化量Δθrは、−1.0°,0.5°,0°,0.5°,1.0°である。
【0055】
ロール角補正用パラメータ決定ループS310内では、初期値に変化量Δθrを加えた値だけ、判定用データがロール回転させられる(ステップS320)。そして、ロール回転させられた判定用データと基準データの間の輝度差ΔIが演算される(ステップS330)。輝度差ΔIは、判定用データと基準準データの間での画素毎の輝度の差の二乗の総和である。輝度差ΔIの計算は、輝度差ΔIが所定の閾値εよりも小さくなるまで、変数を変えながら繰り返され、輝度差ΔIが所定の閾値εよりも小さくなると、ロール角補正用パラメータ決定ループS310が終了する(ステップS340)。
つまり、輝度差ΔIを用いて判定用データと基準データの間のパターンの類似度を判定し、類似度が高くなると、ロール角補正用パラメータ決定ループS310が終了する。
【0056】
それから、制御装置40は、現在のロール角補正用パラメータθrに、輝度差ΔIが所定の閾値εより小さくなったときの変化量Δθrを足した値を、新しいロール角補正用パラメータθrに設定する(ステップS350)。これにより、ロール角補正用パラメータ決定ルーチンS140が終了する。
【0057】
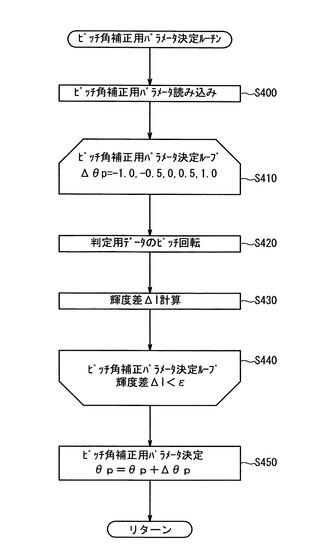
〔ピッチ角補正用パラメータ決定ルーチン〕
図9は、ピッチ角補正用パラメータ決定ルーチンS150の内容を概略的に示すフローチャートである。
図9に示したように、ピッチ角補正用パラメータ決定ルーチンS150では、まず制御装置40は、現在のピッチ角補正用パラメータθpを読み込む(ステップS400)。初めてピッチ角補正用パラメータ決定ルーチンS150を行うときには、現在のピッチ角補正用パラメータθpは、予め設定された適当な初期値である。
【0058】
それから、制御装置40は、ピッチ角補正用パラメータ決定ループS410を実行する。
ピッチ角補正用パラメータ決定ループS410では、変数は、ピッチ角補正用パラメータθpであり、変数の初期値としては、例えば、現在のピッチ角補正用パラメータθpが用いられる。変数の増分、即ち変化量Δθpは、例えば−1.0°,−0.5°,0.5°,1.0°である。なお、初期値も含めると、変化量Δθpは、−1.0°,0.5°,0°,0.5°,1.0°である。
【0059】
ピッチ角補正用パラメータ決定ループS410内では、初期値に変化量Δθpを加えた値だけ、判定用データがピッチ回転させられる(ステップS420)。そして、ピッチ回転させられた判定用データと基準データの間の輝度差ΔIが演算される(ステップS430)。輝度差ΔIは、判定用データと基準準データの間での画素毎の輝度の差の二乗の総和である。輝度差ΔIの計算は、輝度差ΔIが所定の閾値εよりも小さくなるまで、変数を変えながら繰り返され、輝度差ΔIが所定の閾値εよりも小さくなると、ピッチ角補正用パラメータ決定ループS410が終了する(ステップS440)。
つまり、輝度差ΔIを用いて判定用データと基準データの間のパターンの類似度を判定し、類似度が高くなると、ピッチ角補正用パラメータ決定ループS410が終了する。
【0060】
それから、制御装置40は、現在のピッチ角補正用パラメータθpに、輝度差ΔIが所定の閾値εより小さくなったときの変化量Δθpを足した値を、新しいピッチ角補正用パラメータθpに設定する(ステップS450)。これにより、ピッチ角補正用パラメータ決定ルーチンS150が終了する。
【0061】
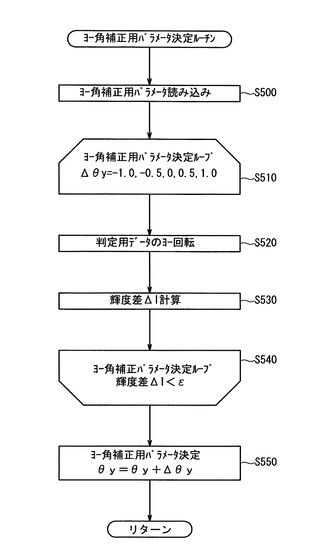
〔ヨー角補正用パラメータ決定ルーチン〕
図10は、ヨー角補正用パラメータ決定ルーチンS160の内容を概略的に示すフローチャートである。
図10に示したように、ヨー角補正用パラメータ決定ルーチンS160では、まず制御装置40は、現在のヨー角補正用パラメータθyを読み込む(ステップS500)。初めてヨー角補正用パラメータ決定ルーチンS160を行うときには、現在のヨー角補正用パラメータθyは、予め設定された適当な初期値である。
【0062】
それから、制御装置40は、ヨー角補正用パラメータ決定ループS510を実行する。
ヨー角補正用パラメータ決定ループS510では、変数は、ヨー角補正用パラメータθyであり、変数の初期値としては、例えば、現在のヨー角補正用パラメータθyが用いられる。変数の増分、即ち変化量Δθyは、例えば、−1.0°,−0.5°,0.5°,1.0°である。なお、初期値も含めると、変化量Δθyは、−1.0°,0.5°,0°,0.5°,1.0°である。
【0063】
ヨー角補正用パラメータ決定ループS510内では、初期値に変化量Δθyを加えた値だけ、判定用データがヨー回転させられる(ステップS520)。そして、ヨー回転させられた判定用データと基準データの間の輝度差ΔIが演算される(ステップS530)。輝度差ΔIは、判定用データと基準準データの間での画素毎の輝度の差の二乗の総和である。輝度差ΔIの計算は、輝度差ΔIが所定の閾値εよりも小さくなるまで、変数を変えながら繰り返され、輝度差ΔIが所定の閾値εよりも小さくなると、ヨー角補正用パラメータ決定ループS510が終了する(ステップS540)。
つまり、輝度差ΔIを用いて判定用データと基準データの間のパターンの類似度を判定し、類似度が高くなると、ヨー角補正用パラメータ決定ループS510が終了する。
【0064】
それから、制御装置40は、現在のヨー角補正用パラメータθyに、輝度差ΔIが所定の閾値εより小さくなったときの変化量Δθyを足した値を、新しいヨー角補正用パラメータθyに設定する(ステップS550)。これにより、ヨー角補正用パラメータ決定ルーチンS160が終了する。
【0065】
かくして、ロール角補正用パラメータ決定ルーチンS140、ピッチ角補正用パラメータ決定ルーチンS150、及び、ヨー角補正用パラメータ決定ルーチンS160が終了すると、第1画像データ及び第2画像データの各々の位置補正処理S30に用いられる、ロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθyの3つが互いに独立して全て決定される。
【0066】
上述した一実施形態のステレオカメラシステム100では、第1カメラ20a及び第2カメラ20bの視野に、第2カメラ20b及び第1カメラ20aの一部がそれぞれ含まれる。そして、第1画像データ及び第2画像データにそれぞれ含まれる第2カメラ20b及び第1カメラ20aの一部の画像に対応する判定用データに基づいて、位置補正処理S30が行われる。
【0067】
このステレオカメラシステム100は、外部の物体を位置補正処理S30に使用しないので、位置補正処理S30に用いられる物体の幾何学的情報を、使用環境に応じて変更する必要がない。
一方、第2カメラ20b及び第1カメラ20aの一部の幾何学的情報は既知であり、外部の物体を位置補正処理に用いる場合と同様に、高精度にて位置補正処理S30が実行される。
【0068】
また、上述した一実施形態のステレオカメラシステム100では、第1画像データに含まれる第2カメラ20bの一部の画像に対応する判定用データに基づき、第1画像データに位置補正処理S30が行われ、第2画像データに含まれる第1カメラ20aの一部の画像に対応する判定用データに基づき、第2画像データに位置補正処理S30が行われる。
【0069】
従って、第2カメラ20bに対する第1カメラ20aの位置関係のずれ、及び、第2カメラ20bに対する第1カメラ20aの位置関係のずれが直接的且つ確実に把握され、位置補正処理S30がより高精度にて行われる。
更に、上述した一実施形態のステレオカメラシステム100では、第1カメラ20a及び第2カメラ20bの画角が180°を超えていることによって、簡単な構成にて、第1カメラ20a及び第2カメラ20bの視野に、他方の一部が含まれる。
【0070】
一方、上述した一実施形態のステレオカメラシステム100が適用された車両10によれば、エンジンの起動時に、ロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθyが演算されることにより、たとえ経時的に基台30が変形したとしても、高精度にて位置補正処理S30が行われる。
その上、上述した一実施形態のステレオカメラシステム100が適用された車両10によれば、第1カメラ20a及び第2カメラ20cの画角は広いため、車両10の後尾の側方に存在する障害物も検出され、安全な運転が実現される。
【0071】
本発明は上述した一実施形態に限定されることはなく、一実施形態に種々の変更を加えた形態も含む。
【0072】
例えば、上述した一実施形態のステレオカメラシステム100では、ロール角補正用パラメータ決定ループS310、ピッチ角補正用パラメータ決定ループS410、及び、ヨー角補正用パラメータ決定ループS510での変数の変化量Δθr,Δθp,Δθyは、いずれも−1.0°,0.5°,0°,0.5°,1.0°であったが、変化量Δθr,Δθy,Δθpの範囲や間隔は、同一である必要はなく、適当に選択することができる。
【0073】
また、ロール角補正用パラメータ決定ループS310、ピッチ角補正用パラメータ決定ループS410、及び、ヨー角補正用パラメータ決定ループS510の終了条件を規定する閾値εについても、同一である必要はなく、適当に選択することができる。
また、上述した一実施形態においては、第1カメラ20a及び第2カメラ20bの各々のX軸、Y軸及びZ軸を中心とした回転変位に基づく誤差を補正するようにしたが、これに限られるものではなく、第1カメラ20a及び第2カメラ20bの各々のX軸、Y軸及びZ軸に沿った平行変位に基づく誤差を補正するようにしてもよい。
【0074】
上述した一実施形態のステレオカメラシステム100では、第1画像データ及び第2画像データの両方に対し、位置補正処理S30が行われていたが、必要性に応じて、一方にのみ位置補正処理S30が行われるようにしてもよい。
【0075】
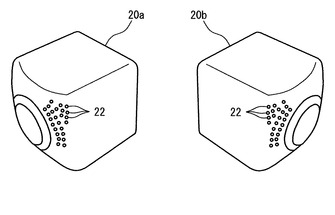
上述した一実施形態のステレオカメラシステム100では、第1カメラ20a及び第2カメラ20bの筐体の形状を利用して、位置補正処理S30が行われていたが、第1カメラ20a及び第2カメラ20bの外表面に、図11に示したように、筐体とは輝度の異なるキャリブレーションマークを付与してもよい。
【0076】
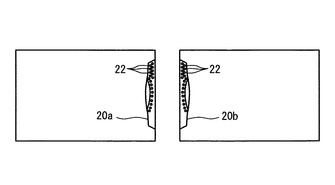
キャリブレーションマークは、好ましくは、複数のドット22からなるドットパターンであり、例えばペイント又はシールによって付与される。図12に示したように、キャリブレーションマークとしてのドット22は、他方の視野に入る筐体の部位に付与される。なお図12でも、第2カメラ20b及び第1カメラ20aの一部の画像のみを示し、他の画像は省略した。
【0077】
この場合、複数のドット22の存在によって判定用データ及び基準データにおける輝度の変化が大きくなるので、変化量Δθr,Δθp,Δθyが不適切な場合に輝度差ΔIが大きくなる一方、変化量Δθr,Δθp,Δθyが適切な場合に輝度差ΔIが小さくなる。このため、適切な変化量Δθr,Δθp,Δθyを決定し易く、第1カメラ20a及び第2カメラ20bの筐体の色や形状に関係なく、位置補正処理S30が高精度にて行われる。
なお、ドット22の数、大きさ、形状、及び、配列は適当に選択することができる。
【0078】
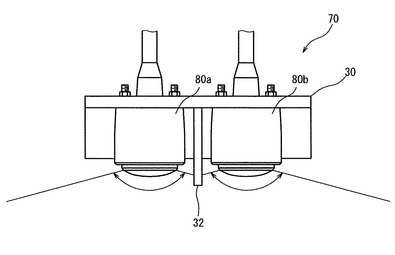
上述した一実施形態のステレオカメラシステム100では、第1カメラ20a及び第2カメラ20bの画角が180°を超えており、第1カメラ20a及び第2カメラ20bの一部の画像に対応する判定用データが、ロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθyの決定に使用されたが、図13に示したように、画角が180°以下の第1カメラ80a及び第2カメラ80bを用いてもよい。
【0079】
この場合、基台30は、第1カメラ80aと第2カメラ80bの間に設けられた壁32を有し、壁32の先端が、第1カメラ80a及び第2カメラ80bの視野に入る。従って、壁32の先端の画像に対応する判定用データを用いて、ロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθyの決定することができる。
【0080】
更に述べれば、ステレオカメラユニット70の一部が第1カメラ80a及び第2カメラ80bの視野に入っていれば、当該部分の画像に対応するデータを用いて、ロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθyを決定することができる。
なお当然のことながら、この場合の基準データは、第1カメラ80aと第2カメラ80bが理想的に平行なときの、ステレオカメラユニット70の一部の画像に対応するデータである。
【0081】
上述した一実施形態のステレオカメラシステム100では、エンジンの起動信号が外部からの命令として制御装置40に入力され、これをトリガーとして、ロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθpが決定・更新されたが、他の外部からの命令に基づいて決定・更新されるようにしてもよい。
【0082】
例えば、車両のギアがバックギアに設定されたときに、これをトリガーとして、ロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθpが決定・更新されるようにしてもよい。つまり、後方監視用プログラムが実行される度に決定・更新されるようにしてもよい。
【0083】
あるいは、図14に示したように、人によって操作される、制御装置40に電気的に接続された入力装置90を設け、入力装置90を介して、ロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθpを決定・更新させる命令が制御装置40に入力されるようにしてもよい。
この場合、人の要求に応じて、いつでも、ロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθpが決定・更新可能である。このため、いつでも必要なときに高精度にて位置補正処理S30が行われ、ステレオカメラシステム100が直ぐに使用に供される。
【0084】
具体的には、入力装置90を用いることによって、ステレオカメラシステム100が適用された車両10に関係する誰であっても、例えば、車両10の製造者、整備員、販売員又は乗員が、ロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθpを演算させられる。
なお、入力装置90は、制御装置40又は画像表示装置50に一体に組み込まれていてもよい。
【0085】
上述した一実施形態では、障害物が存在すると判定したときに、警報音や警報表示によって、運転者に注意を促したけれども、より積極的に、車両10を停止させるようにしてもよい。つまり、ステレオカメラシステム100を車両10の自動制御に利用してもよい。
【0086】
上述した一実施形態では、ステレオカメラシステム100は、画像表示装置50をカーナビゲーションシステムと共有してもよい。これにより、画像表示装置50の設置スペースやコストの削減が図られる。
なお、ステレオカメラシステム100がカーナビゲーションシステムと画像表示装置50を共有している場合には、制御装置40は、車両10のギアがバックギアに設定されたときのみ、第1画像データ又は第2画像データを画像表示装置50に表示させ、それ以外のときは、カーナビゲーションシステムが地図等を画像表示装置50に表示させるようにしてもよい。
【0087】
その他、図示とともに示した構成やプログラムは、いずれも好ましい例であり、本発明の実施に際してこれらを適宜変更可能であることはいうまでもない。
最後に本発明に係るステレオカメラシステムは、車両の前方監視に使用してもよいのは勿論、車両以外にも適用可能であり、例えば、工場の生産ラインにおいて、製品の形状検査等に用いてもよい。
【符号の説明】
【0088】
100 ステレオカメラシステム
10 車両
20a 第1カメラ
20b 第2カメラ
30 基台
40 制御装置
50 画像表示装置
70 ステレオカメラユニット
【技術分野】
【0001】
本発明は、ステレオカメラシステム及び該システムを備える車両に関する。
【背景技術】
【0002】
ステレオカメラシステムは、例えば車両に取り付けられ、車両前方の障害物までの距離を測定するのに使用されている。
ステレオカメラシステムは、2台のカメラによって得られた2つの画像の視差を利用して距離を算出する。このため、2台のカメラ間の相対的な位置関係にずれがあると、正しい距離を求めることができない。また、当初、2台のカメラ間の相対的な位置関係にずれが無いとしても、部品の経時的な変形等によりずれが生じてしまう。
【0003】
そこで、ステレオカメラシステムでは、カメラ間の相対的な位置関係のずれを、機械的にではなく、情報処理技術によって補正することが行われている。
例えば、特許文献1が開示するステレオカメラシステムでは、2台のカメラ間の位置姿勢を規定するキャリブレーションパラメータのずれに基づくキャリブレーションずれが、既知特徴又は自然特徴を用いて補正される。
【0004】
既知特徴は、ある座標系で相対位置が特定されている特徴であり、例えば車両の場合には、ナンバープレートの4つのコーナーや、車両のボンネット上で形状が変化している点や、フロントガラスに配置した黒丸のマーカである。
自然特徴は、撮影された画像内から抽出される特徴であり、自然特徴間の幾何学的距離等の性質は、予め既知ではない。
【0005】
特許文献1が開示するキャリブレーションずれ補正方法によれば、撮影画像から既知特徴又は自然特徴が抽出され、既知特徴又は自然特徴に対応する制約式が求められる。そして、制約式、計測誤差共分散行列、及び、カルマンゲインに基づいて、キャリブレーションパラメータの推定平均値及び推定誤差共分散行列の更新が行われる。推定誤差共分散行列が示す個々のパラメータの分散が小さくなることで、ずれが補正されたキャリブレーションパラメータが得られる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2004−354257号公報(例えば、段落番号0130〜0200、図8、及び、図9等)
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1が開示するキャリブレーションずれ補正方法において、既知特徴を用いる場合、既知特徴間の幾何学的距離を予め入力しなければならない。車両のボンネット上で形状が変化している点のように、車種に固有の特徴を既知特徴として用いる場合、車種毎に異なる幾何学的距離を入力しなければならず、補正のための準備作業が煩雑である。
【0008】
一方、特許文献1が開示するキャリブレーションずれ補正方法において、自然特徴を用いた場合、既知特徴を用いる場合に比べて拘束条件が少ないため、制約式が複雑である。このため、既知特徴を用いる場合に比べて、計算が複雑であり、補正の精度が低下する虞がある。
【0009】
本発明は上記した事情に鑑みてなされ、その目的とするところは、外部の物体を利用することなく、簡単な構成にて、画像データの位置補正処理を高精度にて行う、汎用性の高いステレオカメラシステム及び該システムを備える車両を提供することにある。
【課題を解決するための手段】
【0010】
上記の課題を解決するため、本発明は以下の解決手段を採用する。
解決手段1:本発明の一態様によれば、第1カメラ、第2カメラ、並びに、第1カメラ及び第2カメラが設置される基台を有するステレオカメラユニットと、前記第1カメラが出力する第1画像データ及び前記第2カメラが出力する第2画像データの少なくとも一方に位置補正処理を行ったうえで、前記第1画像データ及び第2画像データに基づき、前記第1画像データ及び前記第2画像データ中の物体の距離を判定する制御装置とを備えるステレオカメラシステムであって、前記第1カメラ及び前記第2カメラの視野に、前記ステレオカメラユニットの一部がそれぞれ含まれ、前記制御装置は、前記第1画像データ及び前記第2画像データに含まれる前記ステレオカメラユニットの一部の画像に対応するデータに基づいて前記位置補正処理を行うことを特徴とするステレオカメラシステムが提供される。
【0011】
解決手段1のステレオカメラシステムでは、第1カメラ及び第2カメラの視野に、ステレオカメラユニットの一部がそれぞれ含まれ、第1画像データ及び第2画像データに含まれるステレオカメラユニットの一部の画像に対応するデータに基づいて位置補正処理が行われる。
このステレオカメラシステムは、外部の物体を位置補正処理に使用しないので、位置補正処理に用いられる物体の幾何学的情報を、使用環境に応じて変更する必要がない。
一方、ステレオカメラユニットの一部の幾何学的情報は既知であり、外部の物体を位置補正処理に用いる場合と同様に、高精度にて位置補正処理が実行される。
【0012】
解決手段2:好ましくは、前記第1カメラの視野に、前記ステレオカメラユニットの一部として前記第2カメラの一部が含まれ、前記第2カメラの視野に、前記ステレオカメラユニットの一部として前記第1カメラの一部が含まれ、前記制御装置は、前記第1画像データに含まれる前記第2カメラの一部の画像に対応するデータに基づき、前記第1画像データに位置補正処理を行い、前記第2画像データに含まれる前記第1カメラの一部の画像に対応するデータに基づき、前記第2画像データに位置補正処理を行う。
【0013】
解決手段2のステレオカメラシステムでは、第1画像データに含まれる第2カメラの一部の画像に対応するデータに基づき、第1画像データに位置補正処理が行われ、第2画像データに含まれる第1カメラの一部の画像に対応するデータに基づき、第2画像データに位置補正処理が行われる。
従って、第2カメラに対する第1カメラの位置関係のずれ、及び、第2カメラに対する第1カメラの位置関係のずれが直接的且つ確実に把握され、位置補正処理がより高精度にて行われる。
【0014】
解決手段3:好ましくは、前記第1カメラ及び前記第2カメラのうち少なくとも一方の筐体には、他方のカメラの視野に含まれる部位に、前記筐体とは輝度の異なるキャリブレーションマークが付与されている。
解決手段3のステレオカメラシステムでは、筐体とは輝度の異なるキャリブレーションマークを用いることによって、第1カメラ及び第2カメラの筐体の色や形状に関係なく、位置補正処理が高精度にて行われる。
【0015】
解決手段4:好ましくは、前記第1カメラ及び第2カメラの画角は180°を超えている。
解決手段4のステレオカメラシステムでは、第1カメラ及び第2カメラの画角が180°を超えていることによって、簡単な構成にて、第1カメラ及び第2カメラの視野に、他方の一部が含まれる。
【0016】
解決手段5:好ましくは、前記制御装置は、外部からの命令に基づいて、前記位置補正処理に使用される補正用パラメータを前記ステレオカメラユニットの一部の画像に対応するデータに基づいて演算する。
【0017】
解決手段5のステレオカメラシステムでは、外部からの命令に応じて、いつでも、位置補正処理に使用される補正用パラメータが演算される。つまり、補正用パラメータは適宜更新可能である。このため、第1カメラと第2カメラの間の相対的な位置関係に経時的にずれが生じたとしても、高精度にて位置補正処理が行われる。
【0018】
解決手段6:本発明の他の態様によれば、解決手段5に記載のステレオカメラシステムを備える車両であって、前記外部からの命令は、人によって入力されるか、前記車両のエンジンの起動に連動して入力されるか、又は、前記車両のギアの変更に連動して入力されることを特徴とする車両が提供される。
【0019】
解決手段6の車両によれば、人からの命令によって補正用パラメータを演算させられる。このため、必要なときにいつでも位置補正処理が行われ、ステレオカメラシステムが直ぐに使用に供される。あるいは、エンジンの起動時又はギアの変更時に補正用パラメータが演算されることにより、常に、高精度にて位置補正処理が行われる。
【発明の効果】
【0020】
本発明によれば、外部の物体を利用することなく、簡単な構成にて、画像データの位置補正処理を高精度にて行う、汎用性の高いステレオカメラシステム及び該システムを備える車両が提供される。このステレオカメラシステムによれば、物体までの距離の測定が高精度にて行われ、該システムを備える車両では、安全運転が実現される。
【図面の簡単な説明】
【0021】
【図1】車両に適用された一実施形態に係るステレオカメラシステムの構成を概略的に示すブロック図である。
【図2】図1のステレオカメラシステムに適用されたステレオカメラユニットの概略的な正面図である。
【図3】図2のステレオカメラユニットの概略的な上面図である。
【図4】図2のステレオカメラユニットを構成する第1カメラ及び第2カメラによって撮影される画像を概略的に示す図である。
【図5】図1のステレオカメラシステムの制御装置が実行する後方監視用プログラムを概略的に示すフローチャートである。
【図6】図1のステレオカメラシステムの制御装置が実行する第1画像のための補正用パラメータ決定プログラムを概略的に示すフローチャートである。
【図7】図1のステレオカメラシステムの制御装置が実行する第2画像のための補正用パラメータ決定プログラムを概略的に示すフローチャートである。
【図8】図6及び図7中のロール角補正用パラメータ決定ルーチンを概略的に示すフローチャートである。
【図9】図6及び図7中のピッチ角補正用パラメータ決定ルーチンを概略的に示すフローチャートである。
【図10】図6及び図7中のヨー角補正用パラメータ決定ルーチンを概略的に示すフローチャートである。
【図11】変形例に係る第1カメラ及び第2カメラを概略的に示す斜視図である。
【図12】図11の第1カメラ及び第2カメラによって撮影される画像を概略的に示す図である。
【図13】変形例に係るステレオカメラユニットを示す概略的な上面図である。
【図14】変形例に係るステレオカメラシステムの概略的な構成を示すブロック図である。
【発明を実施するための形態】
【0022】
以下、本発明の実施形態について図面を参照しながら説明する。
図1は、車両10に適用された一実施形態のステレオカメラシステム100の概略的な構成を示している。
ステレオカメラシステム100は、第1カメラ20a、第2カメラ20bb、基台30、制御装置40、画像表示装置50、及び、必要に応じてスピーカー60を有する。
【0023】
〔カメラ〕
第1カメラ20a及び第2カメラ20bは、撮像素子を有するデジタルカメラであり、撮影範囲に対応するデジタルの第1画像データ及び第2画像データをそれぞれ生成する。
図2に示したように、第1カメラ20a及び第2カメラ20bは、互いに平行になるように基台30に固定され、基台30が車両に固定される。第1カメラ20a、第2カメラ20b、及び、基台30は、1つのステレオカメラユニット70を構成している。
【0024】
基台30は、例えば、第1カメラ20a及び第2カメラ20bが、車両の後方を向くように配置される。つまり、本実施形態では、ステレオカメラシステム100は、車両後方を監視するために用いられる。具体的には、基台30は、車両10のトランクリッド若しくはリアゲート、リアバンパー周辺、又は、車両10の天井等に取り付けられる。基台30は、車両10の幅方向では、略中央に取り付けられる。
【0025】
基台30は、例えば断面L字形状の金属製のブラケットであり、基台30に対し、第1カメラ20a及び第2カメラ20bは、ボルト若しくは螺子等を用いて固定されている。また、基台30は、車両10に対し、ボルト若しくは螺子等を用いて固定されている。
【0026】
図3に示したように、第1カメラ20a及び第2カメラ20bの画角は180°を超えており、例えば190°である。画角で分類すれば、第1カメラ20a及び第2カメラ20bは、超広角又は魚眼カメラである。第1カメラ20a及び第2カメラ20bの各々の画角は、隣の第2カメラ20b及び第1カメラ20aの画像を位置補正処理に利用する場合は180°以上であることが望ましい。
【0027】
第1カメラ20a及び第2カメラ20bは互いに平行に配置されている。図4の右側は、第1カメラ20aによってそれぞれ取得された第1画像データを表示したものであり、図4の左側は、第2カメラ20bによって取得された第2画像データを示している。
図4に示したように、第1カメラ20aの視野には、第2カメラ20bの一部が含まれており、第2カメラ20bの視野には、第1カメラ20aの一部が含まれている。
なお、図4では、第2カメラ20b及び第1カメラ20aの一部の画像のみを示し、他の画像は省略した。
【0028】
〔制御装置〕
制御装置40は、例えば、マイクロコンピュータによって構成され、CPU(中央演算処理装置)及びメモリ等を含む。制御装置40は、第1カメラ20a及び第2カメラ20bに電気的に接続されており、第1カメラ20aによって撮影された画像のデータ(第1画像データ)及び第2カメラ20bによって撮影された画像のデータ(第2画像データ)を読み込む。
【0029】
そして制御装置40は、読み込んだ第1画像データ及び第2画像データに、位置補正処理を実行した上で、第1画像データ及び第2画像データのうち例えば第1画像データを画像表示装置50に表示させる。画像表示装置50は、例えば、液晶ディスプレイであり、車両10のインストルメントパネル(ダッシュボード)の中央に設置される。なお、画像データを表示させるとは、画像データに対応する画像を表示させるということである。
【0030】
一方、制御装置40は、第1画像データ及び第2画像データに障害物が写っている場合には、位置補正処置が施された第1画像データと第2画像データの間における、障害物の視差を利用して、障害物までの距離を測定する。そして、障害物までの距離に応じて、即ち危険度に応じて、スピーカー60に警報音を発生させる。
また、制御装置40は、警報表示として、例えば、障害物を囲む赤枠を画像表示装置50に表示させる。
【0031】
ここで、位置補正処理では、第1カメラ20aと第2カメラ20bの間の相対的な位置関係のずれに基づく、第1画像データ及び第2画像データの回転が補正される。即ち、第1カメラ20a及び第2カメラ20bは、互いに平行になるように機械的に固定されるが、寸法公差や、経時的な部品の変形等によって、現実には平行からずれてしまう。
そして、このずれに起因して、第1画像データ及び第2画像データが回転してしまう。なお、第1画像データ及び第2画像データが回転するとは、第1画像データ及び第2画像データの画像が回転するということである。
【0032】
具体的には、第1画像データ及び第2画像データの回転には、第1カメラ20a及び第2カメラ20bの各々の光軸の回りでのロール、第1カメラと第2カメラの離間方向に平行な軸の回りでのピッチ、及び、光軸及び第1カメラと第2カメラの離間方向に直交する軸の回りでのヨーがある。
【0033】
制御装置40は、第1画像データ及び第2画像データの各々のロールを補正するためのロール角補正用パラメータθr、ピッチを補正するためのピッチ角補正用パラメータθp、及び、ヨーを補正するためのヨー角補正用パラメータθyを決定し、決定したロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθyを用いて、第1画像データ及び第2画像データの各々を回転させる位置補正処理を行う。
【0034】
具体的には、制御装置40は、第1画像データのためのロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθyを決定する場合、変化量Δθr,Δθp,Δθrだけ異なる、複数組のロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθyの候補値を用いて第1画像データを回転させ、各回転後の第1画像データに含まれる第2カメラ20bの筐体の形状に対応する判定用データを、予め入力された基準データと比較する。
【0035】
そして、判定用データと基準データとの差が閾値よりも小さくなったときのロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθyの組を、位置補正処理用のロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθyに設定する。
【0036】
同様に、制御装置40は、第2画像データのためのロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθyを決定する場合、変化量Δθr,Δθp,Δθrだけ異なる、複数組のロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθyの候補値を用いて第2画像データを回転させ、各回転後の第2画像データに含まれる第1カメラ20aの筐体の形状に対応する判定用データを、予め入力された基準データと比較する。
【0037】
そして、判定用データと基準データとの差が閾値よりも小さくなったときのロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθyの組を、位置補正処理用のロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθyに設定する。
【0038】
〔後方監視用プログラム〕
以下、上述した一実施形態のステレオカメラシステム100の動作について、説明する。図5は、制御装置40が実行する、後方監視用のプログラムを概略的に示すフローチャートである。後方監視用のプログラムは、例えば、車両10のギアがバックギアに設定されたときに実行される。
【0039】
具体的には、制御装置40は、初期設定として、第1画像データ及び第2画像データの各々のためのロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθyを読み込む(ステップS10)。
【0040】
それから、制御装置40は、第1カメラ20a及び第2カメラ20bによって取得された第1画像データ及び第2画像データを読み込む(ステップS20)。そして、制御装置40は、読み込んだ第1画像データ及び第2画像データの各々に対し、ステップS10で読み込んだロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθyを用いて、位置補正処理を施す(ステップS30)。
【0041】
この後、制御装置40は、第1画像データ及び第2画像データのうち例えば第1画像データを画像表示装置50に表示させる(ステップS40)。また、制御装置40は、位置補正処理が施された第1画像データ及び第2画像データ中に障害物が存在するか否か判定する(ステップS50)。そして、障害物が存在すれば、障害物までの距離を測定し、必要に応じてスピーカー60に警報音を発生させるとともに、画像表示装置50に警報を表示させる(ステップS60)。
かくして制御装置40は、ギアがバックギアに設定されている間、上述したステップS10〜S50及び必要に応じてS60を繰り返し実行する。
【0042】
次に、制御装置40が実行する、第1画像データ及び第2画像データのためのロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθyを決定する補正用パラメータ決定プログラムについて説明する。
【0043】
〔第1画像のための補正用パラメータ決定プログラム〕
図6は、第1画像データのための補正用パラメータ決定プログラムを概略的に示すフローチャートである。補正用パラメータ決定プログラムは、例えば、車両10のエンジンが起動されると実行される。
【0044】
第1画像データのための補正用パラメータ決定プログラムでは、まず制御装置40が、初期設定として、第1基準データを読み込む(ステップS100)。第1基準データは、第1カメラ20aが第2カメラ20bに対して理想的に平行であるときに、第1画像データに含まれる第2カメラ20bの筐体の外形形状に対応するデータである。なお第1基準データは、予め適当なときに、制御装置40に記憶させられる。
【0045】
次に、制御装置40は、第1カメラ20aに撮影を実行させ、第1画像データを読み込む(ステップS110)。
そして、制御装置40は、第1画像データから、第2カメラ20bの筐体及び筐体の近傍が写っている領域のデータ(第1領域データ)を抽出する(ステップS120)。第1領域データの抽出は、第2カメラ20bの筐体が外れていなければよく、例えば、図4の右側の画像のうち、左端側のデータが第1領域データとして抽出される。
【0046】
この後、制御装置40は、第1領域データを輝度に基づいて2値化し、2値化された第1領域データから、低輝度の領域のデータ(判定用データ)を抽出する(ステップS130)。第2カメラ20bの筐体の色は、通常、黒色等の低輝度の色であるため、判定用データは、第2カメラ20bの筐体の外形形状に対応する。
【0047】
それから、制御装置40は、ロール角補正用パラメータ決定ルーチン(ステップS140)、ピッチ角補正用パラメータ決定ルーチン(ステップS150)、及び、ヨー角補正用パラメータ決定ルーチン(ステップS160)を順次、若しくは、並列的に実行し、第1画像のためのロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθyを決定する。
【0048】
〔第2画像のための補正用パラメータ決定プログラム〕
図7は、第2画像データのための補正用パラメータ決定プログラムを概略的に示すフローチャートである。第2画像データのための補正用パラメータ決定プログラムも、例えば、車両10のエンジンが起動されると実行される。
【0049】
第2画像データのための補正用パラメータ決定プログラムでは、まず制御装置40が、初期設定として、第2基準データを読み込む(ステップS200)。第2基準データは、第2カメラ20bが第1カメラ20aに対して理想的に平行であるときに、第2画像データに含まれる第1カメラ20aの筐体の外形形状に対応するデータである。なお第2基準データは、予め適当なときに、制御装置40に記憶させられる。
【0050】
次に、制御装置40は、第2カメラ20bに撮影を実行させ、第2画像データを読み込む(ステップS210)。
そして、制御装置40は、第2画像データから、第1カメラ20aの筐体及び筐体の近傍が写っている領域のデータ(第2領域データ)を抽出する(ステップS220)。第2領域データの抽出は、第1カメラ20aの筐体が外れていなければよく、例えば、図4の左側の画像のうち、右端側のデータが第2領域データとして抽出される。
【0051】
この後、制御装置40は、第2領域データを輝度に基づいて2値化し、2値化された第2領域データから、低輝度の領域のデータ(判定用データ)を抽出する(ステップS230)。第1カメラ20aの筐体の色は、通常、黒色等の低輝度の色であるため、判定用データは、第1カメラ20aの筐体の外形形状に対応する。
【0052】
それから、制御装置40は、ロール角補正用パラメータ決定ルーチン(ステップS140)、ピッチ角補正用パラメータ決定ルーチン(ステップS150)、ヨー角補正用パラメータ決定ルーチン(ステップS160)を順次、若しくは、並列的に実行し、第2画像のためのロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθyを決定する。
【0053】
〔ロール角補正用パラメータ決定ルーチン〕
図8は、ロール角補正用パラメータ決定ルーチンS140の内容を概略的に示すフローチャートである。
図8に示したように、ロール角補正用パラメータ決定ルーチンS140では、まず制御装置40は、現在のロール角補正用パラメータθrを読み込む(ステップS300)。初めてロール角補正用パラメータ決定ルーチンS140を行うときには、現在のロール角補正用パラメータθrは、予め設定された適当な初期値である。
【0054】
それから、制御装置40は、ロール角補正用パラメータ決定ループS310を実行する。
ロール角補正用パラメータ決定ループS310では、変数は、ロール角補正用パラメータθrであり、変数の初期値としては、例えば、現在のロール角補正用パラメータθrが用いられる。変数の増分、即ち変化量Δθrは、例えば−1.0°,−0.5°,0.5°,1.0°である。なお、初期値も含めると、変化量Δθrは、−1.0°,0.5°,0°,0.5°,1.0°である。
【0055】
ロール角補正用パラメータ決定ループS310内では、初期値に変化量Δθrを加えた値だけ、判定用データがロール回転させられる(ステップS320)。そして、ロール回転させられた判定用データと基準データの間の輝度差ΔIが演算される(ステップS330)。輝度差ΔIは、判定用データと基準準データの間での画素毎の輝度の差の二乗の総和である。輝度差ΔIの計算は、輝度差ΔIが所定の閾値εよりも小さくなるまで、変数を変えながら繰り返され、輝度差ΔIが所定の閾値εよりも小さくなると、ロール角補正用パラメータ決定ループS310が終了する(ステップS340)。
つまり、輝度差ΔIを用いて判定用データと基準データの間のパターンの類似度を判定し、類似度が高くなると、ロール角補正用パラメータ決定ループS310が終了する。
【0056】
それから、制御装置40は、現在のロール角補正用パラメータθrに、輝度差ΔIが所定の閾値εより小さくなったときの変化量Δθrを足した値を、新しいロール角補正用パラメータθrに設定する(ステップS350)。これにより、ロール角補正用パラメータ決定ルーチンS140が終了する。
【0057】
〔ピッチ角補正用パラメータ決定ルーチン〕
図9は、ピッチ角補正用パラメータ決定ルーチンS150の内容を概略的に示すフローチャートである。
図9に示したように、ピッチ角補正用パラメータ決定ルーチンS150では、まず制御装置40は、現在のピッチ角補正用パラメータθpを読み込む(ステップS400)。初めてピッチ角補正用パラメータ決定ルーチンS150を行うときには、現在のピッチ角補正用パラメータθpは、予め設定された適当な初期値である。
【0058】
それから、制御装置40は、ピッチ角補正用パラメータ決定ループS410を実行する。
ピッチ角補正用パラメータ決定ループS410では、変数は、ピッチ角補正用パラメータθpであり、変数の初期値としては、例えば、現在のピッチ角補正用パラメータθpが用いられる。変数の増分、即ち変化量Δθpは、例えば−1.0°,−0.5°,0.5°,1.0°である。なお、初期値も含めると、変化量Δθpは、−1.0°,0.5°,0°,0.5°,1.0°である。
【0059】
ピッチ角補正用パラメータ決定ループS410内では、初期値に変化量Δθpを加えた値だけ、判定用データがピッチ回転させられる(ステップS420)。そして、ピッチ回転させられた判定用データと基準データの間の輝度差ΔIが演算される(ステップS430)。輝度差ΔIは、判定用データと基準準データの間での画素毎の輝度の差の二乗の総和である。輝度差ΔIの計算は、輝度差ΔIが所定の閾値εよりも小さくなるまで、変数を変えながら繰り返され、輝度差ΔIが所定の閾値εよりも小さくなると、ピッチ角補正用パラメータ決定ループS410が終了する(ステップS440)。
つまり、輝度差ΔIを用いて判定用データと基準データの間のパターンの類似度を判定し、類似度が高くなると、ピッチ角補正用パラメータ決定ループS410が終了する。
【0060】
それから、制御装置40は、現在のピッチ角補正用パラメータθpに、輝度差ΔIが所定の閾値εより小さくなったときの変化量Δθpを足した値を、新しいピッチ角補正用パラメータθpに設定する(ステップS450)。これにより、ピッチ角補正用パラメータ決定ルーチンS150が終了する。
【0061】
〔ヨー角補正用パラメータ決定ルーチン〕
図10は、ヨー角補正用パラメータ決定ルーチンS160の内容を概略的に示すフローチャートである。
図10に示したように、ヨー角補正用パラメータ決定ルーチンS160では、まず制御装置40は、現在のヨー角補正用パラメータθyを読み込む(ステップS500)。初めてヨー角補正用パラメータ決定ルーチンS160を行うときには、現在のヨー角補正用パラメータθyは、予め設定された適当な初期値である。
【0062】
それから、制御装置40は、ヨー角補正用パラメータ決定ループS510を実行する。
ヨー角補正用パラメータ決定ループS510では、変数は、ヨー角補正用パラメータθyであり、変数の初期値としては、例えば、現在のヨー角補正用パラメータθyが用いられる。変数の増分、即ち変化量Δθyは、例えば、−1.0°,−0.5°,0.5°,1.0°である。なお、初期値も含めると、変化量Δθyは、−1.0°,0.5°,0°,0.5°,1.0°である。
【0063】
ヨー角補正用パラメータ決定ループS510内では、初期値に変化量Δθyを加えた値だけ、判定用データがヨー回転させられる(ステップS520)。そして、ヨー回転させられた判定用データと基準データの間の輝度差ΔIが演算される(ステップS530)。輝度差ΔIは、判定用データと基準準データの間での画素毎の輝度の差の二乗の総和である。輝度差ΔIの計算は、輝度差ΔIが所定の閾値εよりも小さくなるまで、変数を変えながら繰り返され、輝度差ΔIが所定の閾値εよりも小さくなると、ヨー角補正用パラメータ決定ループS510が終了する(ステップS540)。
つまり、輝度差ΔIを用いて判定用データと基準データの間のパターンの類似度を判定し、類似度が高くなると、ヨー角補正用パラメータ決定ループS510が終了する。
【0064】
それから、制御装置40は、現在のヨー角補正用パラメータθyに、輝度差ΔIが所定の閾値εより小さくなったときの変化量Δθyを足した値を、新しいヨー角補正用パラメータθyに設定する(ステップS550)。これにより、ヨー角補正用パラメータ決定ルーチンS160が終了する。
【0065】
かくして、ロール角補正用パラメータ決定ルーチンS140、ピッチ角補正用パラメータ決定ルーチンS150、及び、ヨー角補正用パラメータ決定ルーチンS160が終了すると、第1画像データ及び第2画像データの各々の位置補正処理S30に用いられる、ロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθyの3つが互いに独立して全て決定される。
【0066】
上述した一実施形態のステレオカメラシステム100では、第1カメラ20a及び第2カメラ20bの視野に、第2カメラ20b及び第1カメラ20aの一部がそれぞれ含まれる。そして、第1画像データ及び第2画像データにそれぞれ含まれる第2カメラ20b及び第1カメラ20aの一部の画像に対応する判定用データに基づいて、位置補正処理S30が行われる。
【0067】
このステレオカメラシステム100は、外部の物体を位置補正処理S30に使用しないので、位置補正処理S30に用いられる物体の幾何学的情報を、使用環境に応じて変更する必要がない。
一方、第2カメラ20b及び第1カメラ20aの一部の幾何学的情報は既知であり、外部の物体を位置補正処理に用いる場合と同様に、高精度にて位置補正処理S30が実行される。
【0068】
また、上述した一実施形態のステレオカメラシステム100では、第1画像データに含まれる第2カメラ20bの一部の画像に対応する判定用データに基づき、第1画像データに位置補正処理S30が行われ、第2画像データに含まれる第1カメラ20aの一部の画像に対応する判定用データに基づき、第2画像データに位置補正処理S30が行われる。
【0069】
従って、第2カメラ20bに対する第1カメラ20aの位置関係のずれ、及び、第2カメラ20bに対する第1カメラ20aの位置関係のずれが直接的且つ確実に把握され、位置補正処理S30がより高精度にて行われる。
更に、上述した一実施形態のステレオカメラシステム100では、第1カメラ20a及び第2カメラ20bの画角が180°を超えていることによって、簡単な構成にて、第1カメラ20a及び第2カメラ20bの視野に、他方の一部が含まれる。
【0070】
一方、上述した一実施形態のステレオカメラシステム100が適用された車両10によれば、エンジンの起動時に、ロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθyが演算されることにより、たとえ経時的に基台30が変形したとしても、高精度にて位置補正処理S30が行われる。
その上、上述した一実施形態のステレオカメラシステム100が適用された車両10によれば、第1カメラ20a及び第2カメラ20cの画角は広いため、車両10の後尾の側方に存在する障害物も検出され、安全な運転が実現される。
【0071】
本発明は上述した一実施形態に限定されることはなく、一実施形態に種々の変更を加えた形態も含む。
【0072】
例えば、上述した一実施形態のステレオカメラシステム100では、ロール角補正用パラメータ決定ループS310、ピッチ角補正用パラメータ決定ループS410、及び、ヨー角補正用パラメータ決定ループS510での変数の変化量Δθr,Δθp,Δθyは、いずれも−1.0°,0.5°,0°,0.5°,1.0°であったが、変化量Δθr,Δθy,Δθpの範囲や間隔は、同一である必要はなく、適当に選択することができる。
【0073】
また、ロール角補正用パラメータ決定ループS310、ピッチ角補正用パラメータ決定ループS410、及び、ヨー角補正用パラメータ決定ループS510の終了条件を規定する閾値εについても、同一である必要はなく、適当に選択することができる。
また、上述した一実施形態においては、第1カメラ20a及び第2カメラ20bの各々のX軸、Y軸及びZ軸を中心とした回転変位に基づく誤差を補正するようにしたが、これに限られるものではなく、第1カメラ20a及び第2カメラ20bの各々のX軸、Y軸及びZ軸に沿った平行変位に基づく誤差を補正するようにしてもよい。
【0074】
上述した一実施形態のステレオカメラシステム100では、第1画像データ及び第2画像データの両方に対し、位置補正処理S30が行われていたが、必要性に応じて、一方にのみ位置補正処理S30が行われるようにしてもよい。
【0075】
上述した一実施形態のステレオカメラシステム100では、第1カメラ20a及び第2カメラ20bの筐体の形状を利用して、位置補正処理S30が行われていたが、第1カメラ20a及び第2カメラ20bの外表面に、図11に示したように、筐体とは輝度の異なるキャリブレーションマークを付与してもよい。
【0076】
キャリブレーションマークは、好ましくは、複数のドット22からなるドットパターンであり、例えばペイント又はシールによって付与される。図12に示したように、キャリブレーションマークとしてのドット22は、他方の視野に入る筐体の部位に付与される。なお図12でも、第2カメラ20b及び第1カメラ20aの一部の画像のみを示し、他の画像は省略した。
【0077】
この場合、複数のドット22の存在によって判定用データ及び基準データにおける輝度の変化が大きくなるので、変化量Δθr,Δθp,Δθyが不適切な場合に輝度差ΔIが大きくなる一方、変化量Δθr,Δθp,Δθyが適切な場合に輝度差ΔIが小さくなる。このため、適切な変化量Δθr,Δθp,Δθyを決定し易く、第1カメラ20a及び第2カメラ20bの筐体の色や形状に関係なく、位置補正処理S30が高精度にて行われる。
なお、ドット22の数、大きさ、形状、及び、配列は適当に選択することができる。
【0078】
上述した一実施形態のステレオカメラシステム100では、第1カメラ20a及び第2カメラ20bの画角が180°を超えており、第1カメラ20a及び第2カメラ20bの一部の画像に対応する判定用データが、ロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθyの決定に使用されたが、図13に示したように、画角が180°以下の第1カメラ80a及び第2カメラ80bを用いてもよい。
【0079】
この場合、基台30は、第1カメラ80aと第2カメラ80bの間に設けられた壁32を有し、壁32の先端が、第1カメラ80a及び第2カメラ80bの視野に入る。従って、壁32の先端の画像に対応する判定用データを用いて、ロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθyの決定することができる。
【0080】
更に述べれば、ステレオカメラユニット70の一部が第1カメラ80a及び第2カメラ80bの視野に入っていれば、当該部分の画像に対応するデータを用いて、ロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθyを決定することができる。
なお当然のことながら、この場合の基準データは、第1カメラ80aと第2カメラ80bが理想的に平行なときの、ステレオカメラユニット70の一部の画像に対応するデータである。
【0081】
上述した一実施形態のステレオカメラシステム100では、エンジンの起動信号が外部からの命令として制御装置40に入力され、これをトリガーとして、ロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθpが決定・更新されたが、他の外部からの命令に基づいて決定・更新されるようにしてもよい。
【0082】
例えば、車両のギアがバックギアに設定されたときに、これをトリガーとして、ロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθpが決定・更新されるようにしてもよい。つまり、後方監視用プログラムが実行される度に決定・更新されるようにしてもよい。
【0083】
あるいは、図14に示したように、人によって操作される、制御装置40に電気的に接続された入力装置90を設け、入力装置90を介して、ロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθpを決定・更新させる命令が制御装置40に入力されるようにしてもよい。
この場合、人の要求に応じて、いつでも、ロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθpが決定・更新可能である。このため、いつでも必要なときに高精度にて位置補正処理S30が行われ、ステレオカメラシステム100が直ぐに使用に供される。
【0084】
具体的には、入力装置90を用いることによって、ステレオカメラシステム100が適用された車両10に関係する誰であっても、例えば、車両10の製造者、整備員、販売員又は乗員が、ロール角補正用パラメータθr、ピッチ角補正用パラメータθp、及び、ヨー角補正用パラメータθpを演算させられる。
なお、入力装置90は、制御装置40又は画像表示装置50に一体に組み込まれていてもよい。
【0085】
上述した一実施形態では、障害物が存在すると判定したときに、警報音や警報表示によって、運転者に注意を促したけれども、より積極的に、車両10を停止させるようにしてもよい。つまり、ステレオカメラシステム100を車両10の自動制御に利用してもよい。
【0086】
上述した一実施形態では、ステレオカメラシステム100は、画像表示装置50をカーナビゲーションシステムと共有してもよい。これにより、画像表示装置50の設置スペースやコストの削減が図られる。
なお、ステレオカメラシステム100がカーナビゲーションシステムと画像表示装置50を共有している場合には、制御装置40は、車両10のギアがバックギアに設定されたときのみ、第1画像データ又は第2画像データを画像表示装置50に表示させ、それ以外のときは、カーナビゲーションシステムが地図等を画像表示装置50に表示させるようにしてもよい。
【0087】
その他、図示とともに示した構成やプログラムは、いずれも好ましい例であり、本発明の実施に際してこれらを適宜変更可能であることはいうまでもない。
最後に本発明に係るステレオカメラシステムは、車両の前方監視に使用してもよいのは勿論、車両以外にも適用可能であり、例えば、工場の生産ラインにおいて、製品の形状検査等に用いてもよい。
【符号の説明】
【0088】
100 ステレオカメラシステム
10 車両
20a 第1カメラ
20b 第2カメラ
30 基台
40 制御装置
50 画像表示装置
70 ステレオカメラユニット
【特許請求の範囲】
【請求項1】
第1カメラ、第2カメラ、並びに、第1カメラ及び第2カメラが設置される基台を有するステレオカメラユニットと、
前記第1カメラが出力する第1画像データ及び前記第2カメラが出力する第2画像データの少なくとも一方に位置補正処理を行ったうえで、前記第1画像データ及び第2画像データに基づき、前記第1画像データ及び前記第2画像データ中の物体の距離を判定する制御装置とを備えるステレオカメラシステムであって、
前記第1カメラ及び前記第2カメラの視野に、前記ステレオカメラユニットの一部がそれぞれ含まれ、
前記制御装置は、前記第1画像データ及び前記第2画像データに含まれる前記ステレオカメラユニットの一部の画像に対応するデータに基づいて前記位置補正処理を行う
ことを特徴とするステレオカメラシステム。
【請求項2】
前記第1カメラの視野に、前記ステレオカメラユニットの一部として前記第2カメラの一部が含まれ、
前記第2カメラの視野に、前記ステレオカメラユニットの一部として前記第1カメラの一部が含まれ、
前記制御装置は、
前記第1画像データに含まれる前記第2カメラの一部の画像に対応するデータに基づき、前記第1画像データに位置補正処理を行い、
前記第2画像データに含まれる前記第1カメラの一部の画像に対応するデータに基づき、前記第2画像データに位置補正処理を行う
ことを特徴とする請求項1記載のステレオカメラシステム。
【請求項3】
前記第1カメラ及び前記第2カメラのうち少なくとも一方の筐体には、他方のカメラの視野に含まれる部位に、前記筐体とは輝度の異なるキャリブレーションマークが付与されている
ことを特徴とする請求項2に記載のステレオカメラシステム。
【請求項4】
前記第1カメラ及び第2カメラの画角は180°を超えていることを特徴とする請求項2又は3に記載のステレオカメラシステム。
【請求項5】
前記制御装置は、外部からの命令に基づいて、前記位置補正処理に使用される補正用パラメータを前記ステレオカメラユニットの一部の画像に対応するデータに基づいて演算することを特徴とする請求項1乃至4の何れか一項に記載のステレオカメラシステム。
【請求項6】
請求項5に記載のステレオカメラシステムを備える車両であって、
前記外部からの命令は、人によって入力されるか、前記車両のエンジンの起動に連動して入力されるか、又は、前記車両のギアの変更に連動して入力されることを特徴とする車両。
【請求項1】
第1カメラ、第2カメラ、並びに、第1カメラ及び第2カメラが設置される基台を有するステレオカメラユニットと、
前記第1カメラが出力する第1画像データ及び前記第2カメラが出力する第2画像データの少なくとも一方に位置補正処理を行ったうえで、前記第1画像データ及び第2画像データに基づき、前記第1画像データ及び前記第2画像データ中の物体の距離を判定する制御装置とを備えるステレオカメラシステムであって、
前記第1カメラ及び前記第2カメラの視野に、前記ステレオカメラユニットの一部がそれぞれ含まれ、
前記制御装置は、前記第1画像データ及び前記第2画像データに含まれる前記ステレオカメラユニットの一部の画像に対応するデータに基づいて前記位置補正処理を行う
ことを特徴とするステレオカメラシステム。
【請求項2】
前記第1カメラの視野に、前記ステレオカメラユニットの一部として前記第2カメラの一部が含まれ、
前記第2カメラの視野に、前記ステレオカメラユニットの一部として前記第1カメラの一部が含まれ、
前記制御装置は、
前記第1画像データに含まれる前記第2カメラの一部の画像に対応するデータに基づき、前記第1画像データに位置補正処理を行い、
前記第2画像データに含まれる前記第1カメラの一部の画像に対応するデータに基づき、前記第2画像データに位置補正処理を行う
ことを特徴とする請求項1記載のステレオカメラシステム。
【請求項3】
前記第1カメラ及び前記第2カメラのうち少なくとも一方の筐体には、他方のカメラの視野に含まれる部位に、前記筐体とは輝度の異なるキャリブレーションマークが付与されている
ことを特徴とする請求項2に記載のステレオカメラシステム。
【請求項4】
前記第1カメラ及び第2カメラの画角は180°を超えていることを特徴とする請求項2又は3に記載のステレオカメラシステム。
【請求項5】
前記制御装置は、外部からの命令に基づいて、前記位置補正処理に使用される補正用パラメータを前記ステレオカメラユニットの一部の画像に対応するデータに基づいて演算することを特徴とする請求項1乃至4の何れか一項に記載のステレオカメラシステム。
【請求項6】
請求項5に記載のステレオカメラシステムを備える車両であって、
前記外部からの命令は、人によって入力されるか、前記車両のエンジンの起動に連動して入力されるか、又は、前記車両のギアの変更に連動して入力されることを特徴とする車両。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2012−32349(P2012−32349A)
【公開日】平成24年2月16日(2012.2.16)
【国際特許分類】
【出願番号】特願2010−174087(P2010−174087)
【出願日】平成22年8月3日(2010.8.3)
【出願人】(000010098)アルプス電気株式会社 (4,263)
【Fターム(参考)】
【公開日】平成24年2月16日(2012.2.16)
【国際特許分類】
【出願日】平成22年8月3日(2010.8.3)
【出願人】(000010098)アルプス電気株式会社 (4,263)
【Fターム(参考)】
[ Back to top ]