
ストアシステム
【課題】管理システム側の管理データを増大させることなく、ワークの先入先出が効率的に実施可能で、工程変更等に対して柔軟性のあるストアシステムを提供する。
【解決手段】無人搬送車2が自走する搬送ルートは、ストアエリア11の所定位置に、ワークWを収容した被搬送台車3aを搬入する搬入ルート15と、ストアエリア11の所定位置から、ワークWを収容した被搬送台車3aを搬出する搬出ルート17とに互いに独立して構成されるので、管理システム側の管理データを増大させることなく、ワークWの先入先出が効率的に実施可能で、工程変更等に対して柔軟性を有するようになる。
【解決手段】無人搬送車2が自走する搬送ルートは、ストアエリア11の所定位置に、ワークWを収容した被搬送台車3aを搬入する搬入ルート15と、ストアエリア11の所定位置から、ワークWを収容した被搬送台車3aを搬出する搬出ルート17とに互いに独立して構成されるので、管理システム側の管理データを増大させることなく、ワークWの先入先出が効率的に実施可能で、工程変更等に対して柔軟性を有するようになる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、無人搬送車を用いてワークの先入先出を行うストアシステムに関するものである。
【背景技術】
【0002】
基本的なストア方式としては、固定ロケーション方式、フリーロケーション方式及びダブルトランザクション方式がある。
固定ロケーション方式は、ワークの種類毎に保管する場所を決める方式である。しかしながら、該固定ロケーション方式は、工程変更やレイアウト変更に対する柔軟性に欠け、スペース効率が悪い。これは、取り出し側の都合で保管場所が決まってしまうためである。フリーロケーション方式は、空いている場所に各種のワークを保管していく方式であり、また、ダブルトランザクション方式は、固定ロケーション方式とフリーロケーション方式とを組み合せた方式である。しかしながら、フリーロケーション方式及びダブルトランザクション方式は、基本的に在庫管理が必要で、管理データとワークそのものを常に合致させておく必要がある(棚卸しが必要)。また、ダブルトランザクション方式では、ストレージ部にシュータを設置してデータ管理を省くことは可能であるが、重量物を扱う場合、設備の重量が増し床面に設置する必要があるため、工程変更やレイアウト変更に対する柔軟性に欠ける。
【0003】
また、特許文献1には、非軌道走行ラインに沿って自動走行可能な無人搬送車を設け、走行ラインに沿ってその任意の一部に、走行方向及び上下方向に複数の物品収納空間を有する棚を配設して、無人搬送車上に、棚の物品収納空間との間で物品を受け渡す移載ロボットを設ける無人搬送車を用いた倉庫システムが開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−277062号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上述した特許文献1に係る発明では、在庫データを集中的に別途管理する必要があり、管理データ量が膨大になり、上述した問題を解決することはできない。
【0006】
本発明は、かかる点に鑑みてなされたものであり、管理システム側の管理データを増大させることなく、ワークの先入先出が効率的に実施可能で、工程変更等に対して柔軟性のあるストアシステムを提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明の請求項1の発明は、無人搬送車を用いたストアシステムにおいて、前記無人搬送車が自走する搬送ルートは、ストアエリアの所定位置に、ワークを収容した被搬送台車を搬入する搬入ルートと、前記ストアエリアの所定位置から、ワークを収容した被搬送台車を搬出する搬出ルートとに互いに独立して構成されることを特徴とするものである。
請求項1の発明では、無人搬送車による被搬送台車の搬入ルートは、ワークを受け取るストア入口と、ワークを収容した被搬送台車が保管されるストアエリアと、空の被搬送台車が複数待機される空台車待機エリアとを結ぶループ状(閉回路)のルートにて構成される。一方、無人搬送車による被搬送台車の搬出ルートは、ワークを収容した被搬送台車が保管されるストアエリアと、ワークを搬出するストア出口と、空の被搬送台車が複数待機される空台車待機エリアとを結ぶループ状(閉回路)のルートにて構成される。
【発明の効果】
【0008】
本発明によれば、管理システム側の管理データを増大させることなく、ワークの先入先出が効率的に実施可能で、工程変更に対して柔軟性のあるストアシステムを提供することができる。
【図面の簡単な説明】
【0009】
【図1】図1は、本発明の実施の形態に係るストアシステムの模式図である。
【図2】図2は、磁気導線に沿って走行する、被搬送台車を牽引した無人搬送車の斜視図である。
【図3】図3は、本ストアシステムに採用した台車連結機構を示す図であり、進行方向に隣接する被搬送台車が連結される様子を段階的に示す図である。
【図4】図4は、本ストアシステムに採用した台車連結機構を示す図であり、ストアレーンまたは空台車待機エリアから被搬送台車が退出する際、その後方の被搬送台車との連結が解除される様子を示す図である。
【発明を実施するための形態】
【0010】
以下、本発明を実施するための形態を図1〜図4に基づいて詳細に説明する。
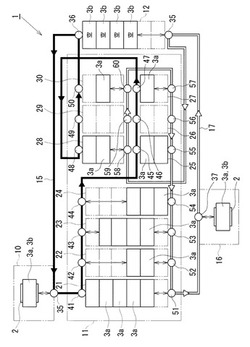
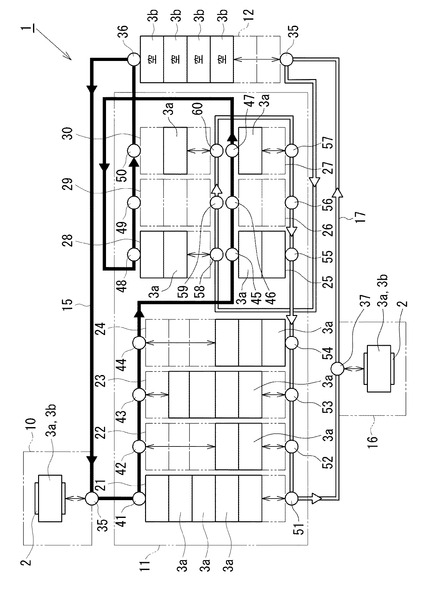
本発明の実施の形態に係るストアシステム1では、図1に示すように、無人搬送車2が自走する搬送レートは、ワークW(図2参照)を受け取るストア入口10、ワークWを収容した被搬送台車3aが複数保管されるストアエリア11及び空の被搬送台車3bが複数待機される空台車待機エリア12を結ぶ搬入ルート15と、ワークWを収容した被搬送台車3aが複数保管されるストアエリア11、ワークWを搬出するストア出口16及び空の被搬送台車3bが複数待機される空台車待機エリア12を結ぶ搬出ルート17とに互いに独立して構成される。
【0011】
ストアエリア11は、ワークWを収容した被搬送台車3aが複数保管されるエリアであって、複数のストアレーン21〜30に仕切られて構成される。本実施の形態では、10箇所のストアレーン21〜30に仕切られて構成される。第1〜第10ストアレーン21〜30には無人搬送車2の進行方向に沿って複数の被搬送台車3aが直列的に配置される。なお、第1〜第10ストアレーン21〜30は被搬送台車3aに収容されるワークWの種類毎に仕切られる。
【0012】
そこで、本実施の形態では、例えば、図1の紙面視において、ストアエリア11の左寄りには、被搬送台車3aの保管可能台数が最も多く設定される第1〜第4ストアレーン21〜24(各レーン最大6台保管可能)が左右方向に並列的に配列される。また、これら第1〜第4ストアレーン21〜24から右側で、且つ下側に被搬送台車3aの保管可能台数が最も少なく設定される第5〜第7ストアレーン25〜27(各レーン最大2台保管可能)が左右方向に並列的に配列される。さらに、これら第5〜第7ストアレーン25〜27よりも上側に、被搬送台車3aの保管可能台数が第1〜第4ストアレーン21〜24よりも少なく第5〜第7ストアレーン25〜27よりも多く設定される第8〜第10ストアレーン28〜30(各レーン最大3台保管可能)が左右方向に並列的に配列される。なお、第1〜第10ストアレーン21〜30内には、複数の被搬送台車3aが進行方向に直列的に保管される。
【0013】
空台車待機エリア12は、第7及び第10ストアレーン27、30よりも右側に位置して、第1〜第4ストアレーン21〜24と同数の空の被搬送台車3bを待機させることができる。なお、空台車待機エリア12内には、複数の空の被搬送台車3bが進行方向に直列的に待機する。
ストア入口10は、無人搬送車2が牽引する空の被搬送台車3b内に一個または複数個のワークWを受け取る場所である。該ストア入口10は、例えば、第1ストアレーン21の直上に位置する。
ストア出口16は、無人搬送車2が牽引する被搬送台車3a内に収容されたワークWを搬出する場所である。該ストア出口16は、例えば、第3ストアレーン23及び第4ストアレーン24の下方に位置する。
【0014】
図1に示すように、搬入ルート15及び搬出ルート17は互いに独立して構成される。これら搬入及び搬出ルート15、17は、図2に示すように、床面の所定経路に沿って敷設された磁気導線31と、無人搬送車2の走行方向を案内すべく磁気導線31に沿って間隔を置いて貼設される複数の磁気マーカ32とから構成される。
図1に示すように、搬入ルート15(図1において黒塗)は、ストア入口10と、ストアエリア11の第1〜第10ストアレーン21〜30それぞれの入口と、空台車待機エリア12の出口とを結ぶループ状(閉回路)のルートで構成される。搬入ルート15のストア入口10と近接する位置に空台車牽引中検出IDタグ35が貼設され、また、第1〜第10ストアレーン21〜30それぞれの入口に当該ストアレーンそれぞれに保管すべくワークWに相当するワークIDタグ41〜50がそれぞれ貼設され、さらに、空台車待機エリア12の出口に非牽引検出IDタグ36が貼設される。
【0015】
搬出ルート17(図1において白抜)は、ストアエリア11の第1〜第10ストアレーン21〜30それぞれの出口と、空台車待機エリア12の入口と、ストア出口16とを結ぶループ状(閉回路)のルートで構成される。搬出ルート17のストア出口16と近接する位置にストア出口検出IDタグ37が貼設され、また、第1〜第10ストアレーン21〜30それぞれの出口に当該ストアレーンそれぞれに保管されているワークWに相当するワークIDタグ51〜60がそれぞれ貼設され、さらに、空台車待機エリア12の入口に空台車牽引中検出IDタグ35が貼設される。
【0016】
無人搬送車2は、左右一対の駆動輪を有する駆動輪ユニット(図示略)を備え、上述した磁気導線31に沿って前後進するものである。無人搬送車2は、少なくとも1台がループ状の搬入ルート15及び搬出ルート17のそれぞれを一方向に前進するように構成される。無人搬送車2は、図示は省略するが、駆動輪ユニットの起動/停止等を制御する走行制御装置、被搬送台車3a、3bとの連結/連結解除を制御する連結制御装置、IDタグ読取装置、前方に位置する被搬送台車3a、3bとの距離が所定値以下に到達した際に作動する前方台車検出装置及び生産指示記憶装置等を備えている。これら走行制御装置、連結制御装置、IDタグ読取装置、前方台車検出装置及び生産指示記憶装置は、AGV制御装置40と無線通信によって接続される。AGV制御装置40は、被搬送台車3a、3bとの連結制御、インタロック制御、生産指示(積載したワークW等の情報)及び起動/停止制御等を行う。
【0017】
また、無人搬送車2は、その上部に、被搬送台車3a、3bを連結して牽引しながら走行する。なお、本実施の形態では、無人搬送車2が被搬送台車3a、3bを連結して牽引する牽引式無人搬送車2を採用したが、無人搬送車2が駆動輪ユニットに加え複数の従動輪を備えて、ワークWが収容されるパレットを積載する積載式無人搬送車も採用することができる。しかしながら、この積載式無人搬送車の場合、第1〜第10ストアレーン21〜30にパレットストレージが必要になるため、工程変更等に対する柔軟性に若干欠ける。
【0018】
図2及び図3に示すように、被搬送台車3a、3bは、4隅に従動輪6を備えワークWを収容する台車本体4と、該台車本体4に設けた無人搬送車2との連結部(図示略)と、台車本体4に設けた台車連結機構5とを備えている。なお、被搬送台車3a、3bには複数のワークWが積載される場合もある。
【0019】
台車連結機構5は、被搬送台車3a、3bを各ストアレーン21〜30または空台車待機エリア12に収容する際、該ストアレーン21〜30または空台車待機エリア12に保管された最も入口側に位置した被搬送台車3a、3bの後方に無人搬送車2が被搬送台車3a、3bを牽引して近接した際、無人搬送車2と被搬送台車3a、3bとの連結を解除すると、連結を解除された被搬送台車3a、3bが各ストアレーン21〜30または空台車待機エリア12に保管された最も入口側に位置した被搬送台車3a、3bに自動的に連結できるように構成される。一方、各ストアレーン21〜30または空台車待機エリア12に保管された最も出口側に位置する被搬送台車3a、3bを退出させる際、当該被搬送台車3a、3bに無人搬送車2が連結されて該無人搬送車2が前進すると、当該被搬送台車3a、3bとその後方の被搬送台車3a、3bとの連結が自動的に解除されるように構成される。
【0020】
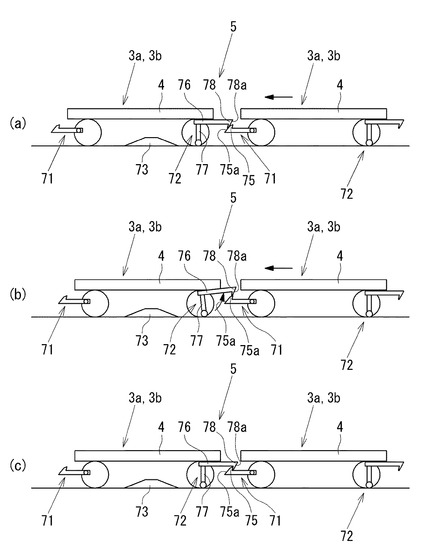
本実施の形態では、図3及び図4に示すように、台車連結機構5は、被搬送台車3a、3bの前部から前方に突設される第1連結部材71と、被搬送台車3a、3bの後部から後方に突設される第2連結部材72と、各ストアレーン21〜30及び空台車待機エリア12の最前列(最も出口側)の被搬送台車3a、3bの保管領域内の所定位置から突設する連結解除用ドグ73とから構成される。
【0021】
第1連結部材71は、棒状で形成され、その先端部に上方に突設される前側連結部75が形成される。該前側連結部75の前面は鉛直方向に対して斜め後方に延びる案内テーパ面75aが形成される。
第2連結部材72は、後方に延びる連結用棒状部76と、該連結用棒状部76の前端に連結され下方に延びる連結解除用棒状部77とからなるL字状に形成される。第2連結部材72は、連結用棒状部76が床面と略平行になる位置から屈曲部を中心に反時計周り方向に回転自在に台車本体4に支持される。また、第2連結部材72の連結用棒状部76は第1連結部材71よりも若干上方に位置する。連結用棒状部76の先端部には下方に突設される後側連結部78が形成される。該後側連結部78の後面は鉛直方向に対して斜め前方に延びる案内テーパ面78aが形成される。
連結解除用ドグ73は、各ストアレーン21〜30及び空台車待機エリア12の最前列(最も出口側)の被搬送台車3a、3bの保管領域内で、被搬送台車3a、3bの第2連結部材72の連結解除用棒状部77よりも前方の位置で、且つ、進行方向に沿って第2連結部材72の連結解除用棒状部77の下端と重なるように床面から突設されて構成される。なお、連結解除用ドグ73は、断面台形状に形成される。
【0022】
そして、台車連結機構5は次のように作用する。
まず、各ストアレーン21〜30(または空台車待機エリア12)内に保管中の被搬送台車3a、3bの後方に、無人搬送車2に牽引された次の被搬送台車3a、3bが接近すると、図3(a)に示すように、保管中の被搬送台車3a、3bの後方から突設される第2連結部材72の連結用棒状部76の後側連結部78の案内テーパ面78aに、次の被搬送台車3a、3bの前方から突設される第1連結部材71の前側連結部75の案内テーパ面75aが互いに当接することで、図3(b)に示すように、保管中の被搬送台車3a、3bの第2連結部材72が屈曲部を中心に反時計周り方向に回転して、図3(c)に示すように、第2連結部材72の連結用棒状部76の後側連結部78と、第1連結部材71の前側連結部75とが係合して両者が連結される。
【0023】
一方、各ストアレーン21〜30(または空台車待機エリア12)の最も出口側に保管された被搬送台車3a、3bに無人搬送車2が連結され、無人搬送車2が前進すると、図4に示すように、牽引された被搬送台車3a、3bの第2連結部材72の連結解除用棒状部77の下端が連結解除用ドグ73に干渉することで、該第2連結部材72が屈曲部を中心に反時計周り方向に回転するために、牽引された被搬送台車3a、3bの第2連結部材72(連結用棒状部76)の後側連結部78と、その後方に位置する被搬送台車3a、3bの第1連結部材71の前側連結部75との係合が解除されて両者の連結が解除される。
【0024】
次に、本発明の実施の形態に係るストアシステム1の作用を説明する。
まず、無人搬送車2が搬入ルート15(図1の黒塗)を走行してストアエリア11にワークWを収容した被搬送台車3aを保管する動作を説明する。
最初に、無人搬送車2が空の被搬送台車3bを牽引している際、無人搬送車2は管理システムからAGV制御装置40を経由して「空台車牽引中」の情報を受け取り記憶している。続いて、無人搬送車2が空の被搬送台車3bを牽引して搬入ルート15上をストア入口10に向かって(一方向に向かって)走行する。すると、無人搬送車2は、その記憶された「空台車牽引中」の情報が、ストア入口10付近に貼設された空台車牽引中検出IDタグ35に一致することで、ストア入口10に進入する。
【0025】
次に、ストア入口10にて、一個または複数個のワークWを空の被搬送台車3b内に受け取る。続いて、無人搬送車2は、受け取ったワークWの情報としての「ワークID」及び「牽引中」の情報を管理システムからAGV制御装置40を経由して受け取り記憶を更新する。続いて、無人搬送車2は、ワークWを収容した被搬送台車3aを牽引してストア入口10から退出して搬入ルート15を一方向(矢印の方向)に向かって走行する。
次に、無人搬送車2は、その記憶した「ワークID」と、ストアエリア11の第1〜第10ストアレーン21〜30それぞれの入口に貼設されているワークIDタグ41〜50のぞれぞれとを照合しながら搬入ルート15を一方向に向かって走行する。
【0026】
そして、無人搬送車2が記憶した「ワークID」が、例えば、第2ストアレーン22の入口に貼設されているワークIDタグ42に一致すると、無人搬送車2は搬入ルート15から第2ストアレーン22内に進入する。無人搬送車2は、第2ストアレーン22内をその前方台車検知装置が作動するまで、すなわち、無人搬送車2が第2ストアレーン22内に保管されている最も後方(最も入口側)に位置する被搬送台車3aとの距離が所定値以下に到達するまで走行する。そして、無人搬送車2の前方台車検知装置が作動すると、AGV制御装置40からの信号により無人搬送車2と被搬送台車3aとの連結が解除される。この時、第2ストアレーン22内に保管されている最も後方(最も入口側)に位置する被搬送台車3aの後方に、搬入されてきた被搬送台車3aが上述した台車連結機構5により自動的に連結される状態となる。
【0027】
なお、第9ストアレーン29のように、該第9ストアレーン29内に被搬送台車3aが一台も保管されていない場合には、無人搬送車2は第9ストアレーン29の最前列(最も出口側)まで走行して、AGV制御装置40からの信号により無人搬送車2と被搬送台車3aとの連結を解除する。
次に、無人搬送車2は、被搬送台車3aとの連結が解除された後、第2ストアレーン22内を逆走して第2ストアレーン22から退出する。続いて、無人搬送車2は、管理システムからAGV制御装置40を経由して「非牽引」の情報を受け取り記憶を更新する。
次に、搬入ルート15に戻った無人搬送車2は、被搬送台車3a、3bを牽引していない状態で、一方向に向かって走行して、最終的に、無人搬送車2に記憶された「非牽引」の情報が、空台車待機エリア12の入口に貼設された非牽引検出IDタグ36に一致すると、搬入ルート15から空台車待機エリア12内に進入する。
【0028】
次に、無人搬送車2は、AGV制御装置40からの信号により、空台車待機エリア12内の最も出口側に位置する空の被搬送台車3bと連結される。続いて、無人搬送車2が空台車待機エリア12から退出すべく前進すると、牽引された空の被搬送台車3bと、その後方に位置する空の被搬送台車3bとは台車連結機構5によりその連結が解除される。続いて、無人搬送車2は空の被搬送台車3bを牽引して空台車待機エリア12から退出して搬入ルート15に戻る。
次に、無人搬送車2は管理システムからAGV制御装置40を経由して「空台車牽引中」の情報を受け取り記憶を更新して、搬入ルート15を一方向に向かって走行して、上述した動作が繰り返される。
【0029】
次に、無人搬送車2が搬出ルート17(図1の白抜)を走行してストアエリア11からワークWを収容した被搬送台車3aをストア出口16に搬送してワークWを搬出する動作を説明する。
まず、無人搬送車2が、ワークWが収容された被搬送台車3aを牽引して搬出ルート17を一方向(矢印の方向)に向かって走行している際には、無人搬送車2は、被搬送台車3a内に収容されたワークWの情報としての「ワークID」、「牽引中」及び「ストア出口」の情報を記憶した状態となっている。そして、この無人搬送車2が、ストア出口16付近に貼設されたストア出口検出ID37を通過すると、その記憶した「ストア出口」の情報とストア出口検出IDタグ37とが一致するために、無人搬送車2は、ストア出口16に進入して被搬送台車3a内のワークWが搬出される。
【0030】
この時、無人搬送車2には、被搬送台車3a内のワークWが全て搬出された時だけ管理システムからAGV制御装置40を経由して「空台車牽引中」の情報を受け取り記憶を更新する。その以外、例えば、何らかの事情によりワークWが全て搬出されない場合(空ではない)には、現在記憶している情報、すなわち「牽引中」及び「ワークID」の情報を保持した状態となる。
次に、無人搬送車2はストア出口16から退出して搬出ルート17を一方向(矢印の方向)に向かって走行する。
【0031】
次に、搬出ルート17を一方向に向かって走行している無人搬送車2が「空台車牽引中」の情報を記憶している時には、その記憶している「空台車牽引中」の情報が、空台車待機エリア12の入口に貼設した空台車牽引中検出IDタグ35と一致して、無人搬送車2は搬出ルート17から空台車待機エリア12に進入する。無人搬送車2は、空台車待機エリア12内をその前方台車検知装置が作動するまで走行する。そして、無人搬送車2の前方台車検知装置が作動すると、AGV制御装置40からの信号により無人搬送車2と空の被搬送台車3bとの連結が解除される。この時、空台車待機エリア12内に保管されている最も入口側に位置する空の被搬送台車3bの後方に、搬入されてきた空の被搬送台車3bが台車連結機構5により自動的に連結される状態となる。
【0032】
次に、無人搬送車2は、空台車待機エリア12を逆走して該空台車待機エリア12から退出する。続いて、空台車待機エリア12から退出した無人搬送車2は、管理システムからAGV制御装置40を経由して、搬出が必要な「ワークID」及び「非牽引」の情報を受け取り記憶を更新する。
【0033】
一方、内部にワークWが残存した状態の被搬送台車3aを牽引した無人搬送車2がストア出口16から退出して搬出ルート17を一方向に走行している場合には、無人搬送車2の記憶は保持された状態であるため、無人搬送車2は、その記憶した「ワークID」と、ストアエリア11の第1〜第10ストアレーン21〜30それぞれの出口に貼設されているワークIDタグ51〜60のぞれぞれとを照合しながら搬出ルート17を一方向に向かって走行する。そして、無人搬送車2が記憶した「ワークID」が、例えば、第6ストアレーン26の出口に貼設されているワークIDタグ56に一致すると、無人搬送車2は搬出ルート17から第6ストアレーン26内に進入して、第6ストアレーン26の最前列(最も出口側)にて、AGV制御装置40からの信号により無人搬送車2と被搬送台車3aとの連結を解除する。なお、本ストアシステム1においては、無人搬送車2により各ストアレーン21〜30内の最前列に位置する被搬送台車3aの搬出動作が一度行われた後は、上述した被搬送台車3aを戻す動作が行われない限り、台車連結機構5の作用により、各ストアレーン21〜30の最前列は空所となっている。続いて、第6ストアレーン26から退出した無人搬送車2には、管理システムからAGV制御装置40を経由して、搬出が必要な「ワークID」及び「非牽引」の情報を受け取り記憶を更新する。
【0034】
次に、無人搬送車2は非牽引の状態で、その記憶した「ワークID」と、ストアエリア11の第1〜第10ストアレーン21〜30それぞれの出口に貼設されているワークIDタグ51〜60のぞれぞれとを照合しながら搬出ルート17を一方向に向かって走行する。
そして、無人搬送車2が記憶した「ワークID」が、例えば、第4ストアレーン24の出口に貼設されているワークIDタグ54に一致すると、無人搬送車2は搬出ルート17から第4ストアレーン24内の最前列に進入する。続いて、無人搬送車2は、AGV制御装置40からの信号により第4ストアレーン24の最前列(最も出口側)に保管されている被搬送台車3aと連結される。続いて、無人搬送車2が第4ストアレーン24から退出すべく前進すると、牽引された被搬送台車3aと、その後方の被搬送台車3aとは台車連結機構5によりその連結が解除される。
なお、第1ストアレーン21のように、その最前列(最も出口側)に被搬送台車3aが保管されていない場合には、無人搬送車2は、第1ストアレーン21内をさらに進入して次の列に保管されている被搬送台車3aと連結し、第1ストアレーン21から退出して搬出ルート17に戻り一方向に向かって走行する。この時も、牽引された被搬送台車3aと、その後方の被搬送台車3aとは第1ストアレーン21の最前列(最も出口側)を通過する際に台車連結機構5によりその連結が解除される。
【0035】
次に、無人搬送車2は、現在記憶している「ワークID」に加えて、管理システムからAGV制御装置40を介して「牽引中」及び「ストア出口」の情報を受け取り記憶する。そして、無人搬送車2が搬出ルート17を一方向に向かって走行して、無人搬送車2が記憶している「ストア出口」の情報が、ストア出口16に貼設されたストア出口検出IDタグ37と一致すると、ストア出口16に進入して被搬送台車3a内のワークWが搬出される。その後は、上述した動作を繰り返す。
【0036】
以上説明したように、本発明の実施の形態に係るストアシステム1では、無人搬送車2の搬送ルートが、ストアエリア11の各ストアレーン21〜30に、ワークWを収容した被搬送台車3aを搬入するループ状(閉回路)の搬入ルート15と、ストアエリア11の各ストアレーン21〜30から、ワークWを収容した被搬送台車3aを搬出するループ状(閉回路)の搬出ルート17とに互いに独立して構成され、搬入ルート15及び搬出ルート17のそれぞれに少なくとも1台の無人搬送車2が一方向に走行するように構成される。
これにより、ストアエリア11の床面に重量物を置く形態を採用していないので、工程変更等に対する柔軟性を確保することができる。また、在庫管理の観点からは、ワークWのストアエリア11への搬入及び搬出時、無人搬送車2が自律的に各ストアレーン21〜30を検索して行うので、管理システム側にワークWの在庫の位置情報等を管理する必要がなく、管理データの冗長性を解消することができる。
【符号の説明】
【0037】
1 ストアシステム,2 無人搬送車,3a 被搬送台車(ワークを収容している状態),3b 空の被搬送台車,5 台車連結機構,10 ストア入口,11 ストアエリア,12 空台車待機エリア,15 搬入ルート,16 ストア出口,17 搬出ルート,21〜30 第1〜第10ストアレーン,35 空台車牽引中検出IDタグ,36 非牽引検出IDタグ,37 ストア出口検出IDタグ,41〜50 ワークIDタグ(搬入ルート用),51〜60 ワークIDタグ(搬出ルート用),W ワーク
【技術分野】
【0001】
本発明は、無人搬送車を用いてワークの先入先出を行うストアシステムに関するものである。
【背景技術】
【0002】
基本的なストア方式としては、固定ロケーション方式、フリーロケーション方式及びダブルトランザクション方式がある。
固定ロケーション方式は、ワークの種類毎に保管する場所を決める方式である。しかしながら、該固定ロケーション方式は、工程変更やレイアウト変更に対する柔軟性に欠け、スペース効率が悪い。これは、取り出し側の都合で保管場所が決まってしまうためである。フリーロケーション方式は、空いている場所に各種のワークを保管していく方式であり、また、ダブルトランザクション方式は、固定ロケーション方式とフリーロケーション方式とを組み合せた方式である。しかしながら、フリーロケーション方式及びダブルトランザクション方式は、基本的に在庫管理が必要で、管理データとワークそのものを常に合致させておく必要がある(棚卸しが必要)。また、ダブルトランザクション方式では、ストレージ部にシュータを設置してデータ管理を省くことは可能であるが、重量物を扱う場合、設備の重量が増し床面に設置する必要があるため、工程変更やレイアウト変更に対する柔軟性に欠ける。
【0003】
また、特許文献1には、非軌道走行ラインに沿って自動走行可能な無人搬送車を設け、走行ラインに沿ってその任意の一部に、走行方向及び上下方向に複数の物品収納空間を有する棚を配設して、無人搬送車上に、棚の物品収納空間との間で物品を受け渡す移載ロボットを設ける無人搬送車を用いた倉庫システムが開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−277062号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上述した特許文献1に係る発明では、在庫データを集中的に別途管理する必要があり、管理データ量が膨大になり、上述した問題を解決することはできない。
【0006】
本発明は、かかる点に鑑みてなされたものであり、管理システム側の管理データを増大させることなく、ワークの先入先出が効率的に実施可能で、工程変更等に対して柔軟性のあるストアシステムを提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明の請求項1の発明は、無人搬送車を用いたストアシステムにおいて、前記無人搬送車が自走する搬送ルートは、ストアエリアの所定位置に、ワークを収容した被搬送台車を搬入する搬入ルートと、前記ストアエリアの所定位置から、ワークを収容した被搬送台車を搬出する搬出ルートとに互いに独立して構成されることを特徴とするものである。
請求項1の発明では、無人搬送車による被搬送台車の搬入ルートは、ワークを受け取るストア入口と、ワークを収容した被搬送台車が保管されるストアエリアと、空の被搬送台車が複数待機される空台車待機エリアとを結ぶループ状(閉回路)のルートにて構成される。一方、無人搬送車による被搬送台車の搬出ルートは、ワークを収容した被搬送台車が保管されるストアエリアと、ワークを搬出するストア出口と、空の被搬送台車が複数待機される空台車待機エリアとを結ぶループ状(閉回路)のルートにて構成される。
【発明の効果】
【0008】
本発明によれば、管理システム側の管理データを増大させることなく、ワークの先入先出が効率的に実施可能で、工程変更に対して柔軟性のあるストアシステムを提供することができる。
【図面の簡単な説明】
【0009】
【図1】図1は、本発明の実施の形態に係るストアシステムの模式図である。
【図2】図2は、磁気導線に沿って走行する、被搬送台車を牽引した無人搬送車の斜視図である。
【図3】図3は、本ストアシステムに採用した台車連結機構を示す図であり、進行方向に隣接する被搬送台車が連結される様子を段階的に示す図である。
【図4】図4は、本ストアシステムに採用した台車連結機構を示す図であり、ストアレーンまたは空台車待機エリアから被搬送台車が退出する際、その後方の被搬送台車との連結が解除される様子を示す図である。
【発明を実施するための形態】
【0010】
以下、本発明を実施するための形態を図1〜図4に基づいて詳細に説明する。
本発明の実施の形態に係るストアシステム1では、図1に示すように、無人搬送車2が自走する搬送レートは、ワークW(図2参照)を受け取るストア入口10、ワークWを収容した被搬送台車3aが複数保管されるストアエリア11及び空の被搬送台車3bが複数待機される空台車待機エリア12を結ぶ搬入ルート15と、ワークWを収容した被搬送台車3aが複数保管されるストアエリア11、ワークWを搬出するストア出口16及び空の被搬送台車3bが複数待機される空台車待機エリア12を結ぶ搬出ルート17とに互いに独立して構成される。
【0011】
ストアエリア11は、ワークWを収容した被搬送台車3aが複数保管されるエリアであって、複数のストアレーン21〜30に仕切られて構成される。本実施の形態では、10箇所のストアレーン21〜30に仕切られて構成される。第1〜第10ストアレーン21〜30には無人搬送車2の進行方向に沿って複数の被搬送台車3aが直列的に配置される。なお、第1〜第10ストアレーン21〜30は被搬送台車3aに収容されるワークWの種類毎に仕切られる。
【0012】
そこで、本実施の形態では、例えば、図1の紙面視において、ストアエリア11の左寄りには、被搬送台車3aの保管可能台数が最も多く設定される第1〜第4ストアレーン21〜24(各レーン最大6台保管可能)が左右方向に並列的に配列される。また、これら第1〜第4ストアレーン21〜24から右側で、且つ下側に被搬送台車3aの保管可能台数が最も少なく設定される第5〜第7ストアレーン25〜27(各レーン最大2台保管可能)が左右方向に並列的に配列される。さらに、これら第5〜第7ストアレーン25〜27よりも上側に、被搬送台車3aの保管可能台数が第1〜第4ストアレーン21〜24よりも少なく第5〜第7ストアレーン25〜27よりも多く設定される第8〜第10ストアレーン28〜30(各レーン最大3台保管可能)が左右方向に並列的に配列される。なお、第1〜第10ストアレーン21〜30内には、複数の被搬送台車3aが進行方向に直列的に保管される。
【0013】
空台車待機エリア12は、第7及び第10ストアレーン27、30よりも右側に位置して、第1〜第4ストアレーン21〜24と同数の空の被搬送台車3bを待機させることができる。なお、空台車待機エリア12内には、複数の空の被搬送台車3bが進行方向に直列的に待機する。
ストア入口10は、無人搬送車2が牽引する空の被搬送台車3b内に一個または複数個のワークWを受け取る場所である。該ストア入口10は、例えば、第1ストアレーン21の直上に位置する。
ストア出口16は、無人搬送車2が牽引する被搬送台車3a内に収容されたワークWを搬出する場所である。該ストア出口16は、例えば、第3ストアレーン23及び第4ストアレーン24の下方に位置する。
【0014】
図1に示すように、搬入ルート15及び搬出ルート17は互いに独立して構成される。これら搬入及び搬出ルート15、17は、図2に示すように、床面の所定経路に沿って敷設された磁気導線31と、無人搬送車2の走行方向を案内すべく磁気導線31に沿って間隔を置いて貼設される複数の磁気マーカ32とから構成される。
図1に示すように、搬入ルート15(図1において黒塗)は、ストア入口10と、ストアエリア11の第1〜第10ストアレーン21〜30それぞれの入口と、空台車待機エリア12の出口とを結ぶループ状(閉回路)のルートで構成される。搬入ルート15のストア入口10と近接する位置に空台車牽引中検出IDタグ35が貼設され、また、第1〜第10ストアレーン21〜30それぞれの入口に当該ストアレーンそれぞれに保管すべくワークWに相当するワークIDタグ41〜50がそれぞれ貼設され、さらに、空台車待機エリア12の出口に非牽引検出IDタグ36が貼設される。
【0015】
搬出ルート17(図1において白抜)は、ストアエリア11の第1〜第10ストアレーン21〜30それぞれの出口と、空台車待機エリア12の入口と、ストア出口16とを結ぶループ状(閉回路)のルートで構成される。搬出ルート17のストア出口16と近接する位置にストア出口検出IDタグ37が貼設され、また、第1〜第10ストアレーン21〜30それぞれの出口に当該ストアレーンそれぞれに保管されているワークWに相当するワークIDタグ51〜60がそれぞれ貼設され、さらに、空台車待機エリア12の入口に空台車牽引中検出IDタグ35が貼設される。
【0016】
無人搬送車2は、左右一対の駆動輪を有する駆動輪ユニット(図示略)を備え、上述した磁気導線31に沿って前後進するものである。無人搬送車2は、少なくとも1台がループ状の搬入ルート15及び搬出ルート17のそれぞれを一方向に前進するように構成される。無人搬送車2は、図示は省略するが、駆動輪ユニットの起動/停止等を制御する走行制御装置、被搬送台車3a、3bとの連結/連結解除を制御する連結制御装置、IDタグ読取装置、前方に位置する被搬送台車3a、3bとの距離が所定値以下に到達した際に作動する前方台車検出装置及び生産指示記憶装置等を備えている。これら走行制御装置、連結制御装置、IDタグ読取装置、前方台車検出装置及び生産指示記憶装置は、AGV制御装置40と無線通信によって接続される。AGV制御装置40は、被搬送台車3a、3bとの連結制御、インタロック制御、生産指示(積載したワークW等の情報)及び起動/停止制御等を行う。
【0017】
また、無人搬送車2は、その上部に、被搬送台車3a、3bを連結して牽引しながら走行する。なお、本実施の形態では、無人搬送車2が被搬送台車3a、3bを連結して牽引する牽引式無人搬送車2を採用したが、無人搬送車2が駆動輪ユニットに加え複数の従動輪を備えて、ワークWが収容されるパレットを積載する積載式無人搬送車も採用することができる。しかしながら、この積載式無人搬送車の場合、第1〜第10ストアレーン21〜30にパレットストレージが必要になるため、工程変更等に対する柔軟性に若干欠ける。
【0018】
図2及び図3に示すように、被搬送台車3a、3bは、4隅に従動輪6を備えワークWを収容する台車本体4と、該台車本体4に設けた無人搬送車2との連結部(図示略)と、台車本体4に設けた台車連結機構5とを備えている。なお、被搬送台車3a、3bには複数のワークWが積載される場合もある。
【0019】
台車連結機構5は、被搬送台車3a、3bを各ストアレーン21〜30または空台車待機エリア12に収容する際、該ストアレーン21〜30または空台車待機エリア12に保管された最も入口側に位置した被搬送台車3a、3bの後方に無人搬送車2が被搬送台車3a、3bを牽引して近接した際、無人搬送車2と被搬送台車3a、3bとの連結を解除すると、連結を解除された被搬送台車3a、3bが各ストアレーン21〜30または空台車待機エリア12に保管された最も入口側に位置した被搬送台車3a、3bに自動的に連結できるように構成される。一方、各ストアレーン21〜30または空台車待機エリア12に保管された最も出口側に位置する被搬送台車3a、3bを退出させる際、当該被搬送台車3a、3bに無人搬送車2が連結されて該無人搬送車2が前進すると、当該被搬送台車3a、3bとその後方の被搬送台車3a、3bとの連結が自動的に解除されるように構成される。
【0020】
本実施の形態では、図3及び図4に示すように、台車連結機構5は、被搬送台車3a、3bの前部から前方に突設される第1連結部材71と、被搬送台車3a、3bの後部から後方に突設される第2連結部材72と、各ストアレーン21〜30及び空台車待機エリア12の最前列(最も出口側)の被搬送台車3a、3bの保管領域内の所定位置から突設する連結解除用ドグ73とから構成される。
【0021】
第1連結部材71は、棒状で形成され、その先端部に上方に突設される前側連結部75が形成される。該前側連結部75の前面は鉛直方向に対して斜め後方に延びる案内テーパ面75aが形成される。
第2連結部材72は、後方に延びる連結用棒状部76と、該連結用棒状部76の前端に連結され下方に延びる連結解除用棒状部77とからなるL字状に形成される。第2連結部材72は、連結用棒状部76が床面と略平行になる位置から屈曲部を中心に反時計周り方向に回転自在に台車本体4に支持される。また、第2連結部材72の連結用棒状部76は第1連結部材71よりも若干上方に位置する。連結用棒状部76の先端部には下方に突設される後側連結部78が形成される。該後側連結部78の後面は鉛直方向に対して斜め前方に延びる案内テーパ面78aが形成される。
連結解除用ドグ73は、各ストアレーン21〜30及び空台車待機エリア12の最前列(最も出口側)の被搬送台車3a、3bの保管領域内で、被搬送台車3a、3bの第2連結部材72の連結解除用棒状部77よりも前方の位置で、且つ、進行方向に沿って第2連結部材72の連結解除用棒状部77の下端と重なるように床面から突設されて構成される。なお、連結解除用ドグ73は、断面台形状に形成される。
【0022】
そして、台車連結機構5は次のように作用する。
まず、各ストアレーン21〜30(または空台車待機エリア12)内に保管中の被搬送台車3a、3bの後方に、無人搬送車2に牽引された次の被搬送台車3a、3bが接近すると、図3(a)に示すように、保管中の被搬送台車3a、3bの後方から突設される第2連結部材72の連結用棒状部76の後側連結部78の案内テーパ面78aに、次の被搬送台車3a、3bの前方から突設される第1連結部材71の前側連結部75の案内テーパ面75aが互いに当接することで、図3(b)に示すように、保管中の被搬送台車3a、3bの第2連結部材72が屈曲部を中心に反時計周り方向に回転して、図3(c)に示すように、第2連結部材72の連結用棒状部76の後側連結部78と、第1連結部材71の前側連結部75とが係合して両者が連結される。
【0023】
一方、各ストアレーン21〜30(または空台車待機エリア12)の最も出口側に保管された被搬送台車3a、3bに無人搬送車2が連結され、無人搬送車2が前進すると、図4に示すように、牽引された被搬送台車3a、3bの第2連結部材72の連結解除用棒状部77の下端が連結解除用ドグ73に干渉することで、該第2連結部材72が屈曲部を中心に反時計周り方向に回転するために、牽引された被搬送台車3a、3bの第2連結部材72(連結用棒状部76)の後側連結部78と、その後方に位置する被搬送台車3a、3bの第1連結部材71の前側連結部75との係合が解除されて両者の連結が解除される。
【0024】
次に、本発明の実施の形態に係るストアシステム1の作用を説明する。
まず、無人搬送車2が搬入ルート15(図1の黒塗)を走行してストアエリア11にワークWを収容した被搬送台車3aを保管する動作を説明する。
最初に、無人搬送車2が空の被搬送台車3bを牽引している際、無人搬送車2は管理システムからAGV制御装置40を経由して「空台車牽引中」の情報を受け取り記憶している。続いて、無人搬送車2が空の被搬送台車3bを牽引して搬入ルート15上をストア入口10に向かって(一方向に向かって)走行する。すると、無人搬送車2は、その記憶された「空台車牽引中」の情報が、ストア入口10付近に貼設された空台車牽引中検出IDタグ35に一致することで、ストア入口10に進入する。
【0025】
次に、ストア入口10にて、一個または複数個のワークWを空の被搬送台車3b内に受け取る。続いて、無人搬送車2は、受け取ったワークWの情報としての「ワークID」及び「牽引中」の情報を管理システムからAGV制御装置40を経由して受け取り記憶を更新する。続いて、無人搬送車2は、ワークWを収容した被搬送台車3aを牽引してストア入口10から退出して搬入ルート15を一方向(矢印の方向)に向かって走行する。
次に、無人搬送車2は、その記憶した「ワークID」と、ストアエリア11の第1〜第10ストアレーン21〜30それぞれの入口に貼設されているワークIDタグ41〜50のぞれぞれとを照合しながら搬入ルート15を一方向に向かって走行する。
【0026】
そして、無人搬送車2が記憶した「ワークID」が、例えば、第2ストアレーン22の入口に貼設されているワークIDタグ42に一致すると、無人搬送車2は搬入ルート15から第2ストアレーン22内に進入する。無人搬送車2は、第2ストアレーン22内をその前方台車検知装置が作動するまで、すなわち、無人搬送車2が第2ストアレーン22内に保管されている最も後方(最も入口側)に位置する被搬送台車3aとの距離が所定値以下に到達するまで走行する。そして、無人搬送車2の前方台車検知装置が作動すると、AGV制御装置40からの信号により無人搬送車2と被搬送台車3aとの連結が解除される。この時、第2ストアレーン22内に保管されている最も後方(最も入口側)に位置する被搬送台車3aの後方に、搬入されてきた被搬送台車3aが上述した台車連結機構5により自動的に連結される状態となる。
【0027】
なお、第9ストアレーン29のように、該第9ストアレーン29内に被搬送台車3aが一台も保管されていない場合には、無人搬送車2は第9ストアレーン29の最前列(最も出口側)まで走行して、AGV制御装置40からの信号により無人搬送車2と被搬送台車3aとの連結を解除する。
次に、無人搬送車2は、被搬送台車3aとの連結が解除された後、第2ストアレーン22内を逆走して第2ストアレーン22から退出する。続いて、無人搬送車2は、管理システムからAGV制御装置40を経由して「非牽引」の情報を受け取り記憶を更新する。
次に、搬入ルート15に戻った無人搬送車2は、被搬送台車3a、3bを牽引していない状態で、一方向に向かって走行して、最終的に、無人搬送車2に記憶された「非牽引」の情報が、空台車待機エリア12の入口に貼設された非牽引検出IDタグ36に一致すると、搬入ルート15から空台車待機エリア12内に進入する。
【0028】
次に、無人搬送車2は、AGV制御装置40からの信号により、空台車待機エリア12内の最も出口側に位置する空の被搬送台車3bと連結される。続いて、無人搬送車2が空台車待機エリア12から退出すべく前進すると、牽引された空の被搬送台車3bと、その後方に位置する空の被搬送台車3bとは台車連結機構5によりその連結が解除される。続いて、無人搬送車2は空の被搬送台車3bを牽引して空台車待機エリア12から退出して搬入ルート15に戻る。
次に、無人搬送車2は管理システムからAGV制御装置40を経由して「空台車牽引中」の情報を受け取り記憶を更新して、搬入ルート15を一方向に向かって走行して、上述した動作が繰り返される。
【0029】
次に、無人搬送車2が搬出ルート17(図1の白抜)を走行してストアエリア11からワークWを収容した被搬送台車3aをストア出口16に搬送してワークWを搬出する動作を説明する。
まず、無人搬送車2が、ワークWが収容された被搬送台車3aを牽引して搬出ルート17を一方向(矢印の方向)に向かって走行している際には、無人搬送車2は、被搬送台車3a内に収容されたワークWの情報としての「ワークID」、「牽引中」及び「ストア出口」の情報を記憶した状態となっている。そして、この無人搬送車2が、ストア出口16付近に貼設されたストア出口検出ID37を通過すると、その記憶した「ストア出口」の情報とストア出口検出IDタグ37とが一致するために、無人搬送車2は、ストア出口16に進入して被搬送台車3a内のワークWが搬出される。
【0030】
この時、無人搬送車2には、被搬送台車3a内のワークWが全て搬出された時だけ管理システムからAGV制御装置40を経由して「空台車牽引中」の情報を受け取り記憶を更新する。その以外、例えば、何らかの事情によりワークWが全て搬出されない場合(空ではない)には、現在記憶している情報、すなわち「牽引中」及び「ワークID」の情報を保持した状態となる。
次に、無人搬送車2はストア出口16から退出して搬出ルート17を一方向(矢印の方向)に向かって走行する。
【0031】
次に、搬出ルート17を一方向に向かって走行している無人搬送車2が「空台車牽引中」の情報を記憶している時には、その記憶している「空台車牽引中」の情報が、空台車待機エリア12の入口に貼設した空台車牽引中検出IDタグ35と一致して、無人搬送車2は搬出ルート17から空台車待機エリア12に進入する。無人搬送車2は、空台車待機エリア12内をその前方台車検知装置が作動するまで走行する。そして、無人搬送車2の前方台車検知装置が作動すると、AGV制御装置40からの信号により無人搬送車2と空の被搬送台車3bとの連結が解除される。この時、空台車待機エリア12内に保管されている最も入口側に位置する空の被搬送台車3bの後方に、搬入されてきた空の被搬送台車3bが台車連結機構5により自動的に連結される状態となる。
【0032】
次に、無人搬送車2は、空台車待機エリア12を逆走して該空台車待機エリア12から退出する。続いて、空台車待機エリア12から退出した無人搬送車2は、管理システムからAGV制御装置40を経由して、搬出が必要な「ワークID」及び「非牽引」の情報を受け取り記憶を更新する。
【0033】
一方、内部にワークWが残存した状態の被搬送台車3aを牽引した無人搬送車2がストア出口16から退出して搬出ルート17を一方向に走行している場合には、無人搬送車2の記憶は保持された状態であるため、無人搬送車2は、その記憶した「ワークID」と、ストアエリア11の第1〜第10ストアレーン21〜30それぞれの出口に貼設されているワークIDタグ51〜60のぞれぞれとを照合しながら搬出ルート17を一方向に向かって走行する。そして、無人搬送車2が記憶した「ワークID」が、例えば、第6ストアレーン26の出口に貼設されているワークIDタグ56に一致すると、無人搬送車2は搬出ルート17から第6ストアレーン26内に進入して、第6ストアレーン26の最前列(最も出口側)にて、AGV制御装置40からの信号により無人搬送車2と被搬送台車3aとの連結を解除する。なお、本ストアシステム1においては、無人搬送車2により各ストアレーン21〜30内の最前列に位置する被搬送台車3aの搬出動作が一度行われた後は、上述した被搬送台車3aを戻す動作が行われない限り、台車連結機構5の作用により、各ストアレーン21〜30の最前列は空所となっている。続いて、第6ストアレーン26から退出した無人搬送車2には、管理システムからAGV制御装置40を経由して、搬出が必要な「ワークID」及び「非牽引」の情報を受け取り記憶を更新する。
【0034】
次に、無人搬送車2は非牽引の状態で、その記憶した「ワークID」と、ストアエリア11の第1〜第10ストアレーン21〜30それぞれの出口に貼設されているワークIDタグ51〜60のぞれぞれとを照合しながら搬出ルート17を一方向に向かって走行する。
そして、無人搬送車2が記憶した「ワークID」が、例えば、第4ストアレーン24の出口に貼設されているワークIDタグ54に一致すると、無人搬送車2は搬出ルート17から第4ストアレーン24内の最前列に進入する。続いて、無人搬送車2は、AGV制御装置40からの信号により第4ストアレーン24の最前列(最も出口側)に保管されている被搬送台車3aと連結される。続いて、無人搬送車2が第4ストアレーン24から退出すべく前進すると、牽引された被搬送台車3aと、その後方の被搬送台車3aとは台車連結機構5によりその連結が解除される。
なお、第1ストアレーン21のように、その最前列(最も出口側)に被搬送台車3aが保管されていない場合には、無人搬送車2は、第1ストアレーン21内をさらに進入して次の列に保管されている被搬送台車3aと連結し、第1ストアレーン21から退出して搬出ルート17に戻り一方向に向かって走行する。この時も、牽引された被搬送台車3aと、その後方の被搬送台車3aとは第1ストアレーン21の最前列(最も出口側)を通過する際に台車連結機構5によりその連結が解除される。
【0035】
次に、無人搬送車2は、現在記憶している「ワークID」に加えて、管理システムからAGV制御装置40を介して「牽引中」及び「ストア出口」の情報を受け取り記憶する。そして、無人搬送車2が搬出ルート17を一方向に向かって走行して、無人搬送車2が記憶している「ストア出口」の情報が、ストア出口16に貼設されたストア出口検出IDタグ37と一致すると、ストア出口16に進入して被搬送台車3a内のワークWが搬出される。その後は、上述した動作を繰り返す。
【0036】
以上説明したように、本発明の実施の形態に係るストアシステム1では、無人搬送車2の搬送ルートが、ストアエリア11の各ストアレーン21〜30に、ワークWを収容した被搬送台車3aを搬入するループ状(閉回路)の搬入ルート15と、ストアエリア11の各ストアレーン21〜30から、ワークWを収容した被搬送台車3aを搬出するループ状(閉回路)の搬出ルート17とに互いに独立して構成され、搬入ルート15及び搬出ルート17のそれぞれに少なくとも1台の無人搬送車2が一方向に走行するように構成される。
これにより、ストアエリア11の床面に重量物を置く形態を採用していないので、工程変更等に対する柔軟性を確保することができる。また、在庫管理の観点からは、ワークWのストアエリア11への搬入及び搬出時、無人搬送車2が自律的に各ストアレーン21〜30を検索して行うので、管理システム側にワークWの在庫の位置情報等を管理する必要がなく、管理データの冗長性を解消することができる。
【符号の説明】
【0037】
1 ストアシステム,2 無人搬送車,3a 被搬送台車(ワークを収容している状態),3b 空の被搬送台車,5 台車連結機構,10 ストア入口,11 ストアエリア,12 空台車待機エリア,15 搬入ルート,16 ストア出口,17 搬出ルート,21〜30 第1〜第10ストアレーン,35 空台車牽引中検出IDタグ,36 非牽引検出IDタグ,37 ストア出口検出IDタグ,41〜50 ワークIDタグ(搬入ルート用),51〜60 ワークIDタグ(搬出ルート用),W ワーク
【特許請求の範囲】
【請求項1】
無人搬送車を用いたストアシステムにおいて、
前記無人搬送車が自走する搬送ルートは、ストアエリアの所定位置に、ワークを収容した被搬送台車を搬入する搬入ルートと、前記ストアエリアの所定位置から、ワークを収容した被搬送台車を搬出する搬出ルートとに互いに独立して構成されることを特徴とするストアシステム。
【請求項1】
無人搬送車を用いたストアシステムにおいて、
前記無人搬送車が自走する搬送ルートは、ストアエリアの所定位置に、ワークを収容した被搬送台車を搬入する搬入ルートと、前記ストアエリアの所定位置から、ワークを収容した被搬送台車を搬出する搬出ルートとに互いに独立して構成されることを特徴とするストアシステム。
【図1】


【図2】

【図3】
【図4】

【図2】
【図3】
【図4】
【公開番号】特開2013−86923(P2013−86923A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−228819(P2011−228819)
【出願日】平成23年10月18日(2011.10.18)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月18日(2011.10.18)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]