
ストレッチ包装装置
【課題】より消費電力を低減できるストレッチ包装装置を提供する。
【解決手段】被包装物投入部と、被包装物排出部と、複数に電気消費部品と、制御部とを備える。被包装物投入部は、被包装物が投入される。被包装物排出部は、被包装物が包装された状態で排出される。複数の電気消費部品は、投入された被包装物を包装して排出する。制御部は、電気消費部品を制御する。被包装物投入部、及び/又は、被包装物排出部の近傍には、人体検知手段が配置される。人体検知手段は、被包装物の投入を行う人の存在を検知する。また、制御部は、モード切替部を有する。モード切替部は、人体検知手段による検知結果に基づいて、通常モードと第1スタンバイモードとを切り替える。第1スタンバイモードは、通常モードよりも消費電力を抑える。
【解決手段】被包装物投入部と、被包装物排出部と、複数に電気消費部品と、制御部とを備える。被包装物投入部は、被包装物が投入される。被包装物排出部は、被包装物が包装された状態で排出される。複数の電気消費部品は、投入された被包装物を包装して排出する。制御部は、電気消費部品を制御する。被包装物投入部、及び/又は、被包装物排出部の近傍には、人体検知手段が配置される。人体検知手段は、被包装物の投入を行う人の存在を検知する。また、制御部は、モード切替部を有する。モード切替部は、人体検知手段による検知結果に基づいて、通常モードと第1スタンバイモードとを切り替える。第1スタンバイモードは、通常モードよりも消費電力を抑える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ストレッチ包装装置に関する。
【背景技術】
【0002】
生鮮食料品などの被包装物を包装する装置として、ストレッチ包装装置が知られている。ストレッチ包装装置には、例えば、特許文献1(特開平11−79138号公報)に開示のように、引き伸ばされた状態のフィルムに対して被包装物を押し上げ、その状態で、フィルムを被包装物の下側に折り込んで包装するものがある。当該文献に開示のストレッチ包装装置では、被包装物が排出されていく際、電気ヒータによって加熱された搬送コンベアベルトを経由することで、被包装物の下側に折り込まれたフィルムが熱シールされる。
【0003】
ところで、近年では、省エネが謳われている。特許文献1(特開平11−79138号公報)に開示の発明でも、先の包装が行われてからの時間が所定時間を経過した場合、電気ヒータのような電気消費部品を節電モードで温度制御している。
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1(特開平11−79138号公報)では、先の包装が行われてからの時間が所定時間を経過した場合、一律に節電モードを行っている。しかし、消費電力の低減に関しては、より考慮の余地があると考える。
【0005】
そこで、本発明の課題は、より消費電力を低減できるストレッチ包装装置を提供することにある。
【課題を解決するための手段】
【0006】
本発明に係るストレッチ包装装置は、被包装物投入部と、被包装物排出部と、複数に電気消費部品と、制御部とを備える。被包装物投入部は、被包装物が投入される。被包装物排出部は、被包装物が包装された状態で排出される。複数の電気消費部品は、投入された被包装物を包装して排出する。制御部は、電気消費部品を制御する。被包装物投入部、及び/又は、被包装物排出部の近傍には、人体検知手段が配置される。人体検知手段は、被包装物の投入を行う人の存在を検知する。また、制御部は、モード切替部を有する。モード切替部は、人体検知手段による検知結果に基づいて、通常モードと第1スタンバイモードとを切り替える。第1スタンバイモードは、通常モードよりも消費電力を抑える。
【0007】
ここでは、人体検知手段による検知結果に基づいて、通常モードとスタンバイモードとを切り替えることによって、消費電力を抑制できる。よって、装置全体としての消費電力を低減できる。
【0008】
また、制御部は、学習部と、決定部とを有することが好ましい。学習部は、時間帯と人体検知手段による検知結果との関係を学習する。決定部は、第1スタンバイモードを行う第1スタンバイモード時間帯を、学習部による学習に基づいて決定する。
【0009】
ここでは、人検知手段による検知結果と時間帯との関係を学習し、消費電力を抑える第1スタンバイモードを行う時間帯を決定することによって、消費電力を低減できる。
【0010】
また、被包装物排出部の近傍に配置され、被包装物の包装材を熱シールするための加熱部材をさらに備えることが好ましい。また、電気消費部品には、加熱部材を加熱するための加熱手段が含まれることが好ましい。また、制御部は、加熱手段を制御する加熱手段制御部をさらに有することが好ましい。また、モード切替部は、通常モードよりも消費電力を抑え第1スタンバイモードよりも消費電力を抑えない第2スタンバイモードに、さらに切り替えることが好ましい。そして、加熱手段制御部は、第1スタンバイモードにおいて、加熱部材の温度が、通常モードにおける通常温度よりも低い第1温度になるように加熱手段を制御することが好ましく、第2スタンバイモードにおいて、加熱部材の温度が、第1温度よりも高く通常温度よりも低い第2温度になるように加熱手段を制御することが好ましい。
【0011】
当該包装装置においては、加熱手段の消費電力が大きいと考えられる。よって、加熱手段を制御することで、消費電力の低減に貢献できる。
【0012】
また、加熱手段制御部は、第1スタンバイモード時間帯が終了する所定時間前から、加熱部材の温度が第1温度から通常温度に近付くように加熱手段を制御することが好ましい。
【0013】
例えば、学習部による学習により第1スタンバイモード時間帯が終了した後は、作業者が被包装物の投入作業を行うと考えられる。よって、当該投入作業を行う時間帯に合わせて加熱手段を制御することで、作業者が投入作業を行うと考えられる時間には加熱部材の温度を通常温度に近い温度まで上げることができる。よって、装置の立ち上げ及び当該装置の作業者による使用を早くできる。
【0014】
また、モード切替部は、通常モードにおいて前回の被包装物が排出されてから所定時間を経過しても次回の被包装物が排出されない場合に、通常モードから第2スタンバイモードに切り替えることが好ましい。これにより、例えば、作業者が一時的に被包装物の投入を行わない時間(時間帯)の消費電力を低減できる。
【0015】
また、第1スタンバイモードにおいて人体検知手段が人の存在を検知した場合に通常モードへ移行するか否かの入力を受け付ける入力受付部、をさらに備えることが好ましい。そして、モード切替部は、入力受付部が通常モードへの移行の入力を受け付けた場合に、第1スタンバイモードを通常モードに切り替えることが好ましい。
【0016】
例えば、学習部による学習によって第1スタンバイモードを行う第1スタンバイモードが決定されていても、当該時間帯に作業者が投入作業を行うことが考えられる。この場合、作業者による通常モードへの移行の入力を入力受付部を介して受け付けることにより、作業者が作業を行うことができるようになる。他方、第1スタンバイモードにおいて、包装装置の近傍に作業者が立っており人体検知手段が当該作業者を検知したとしても、入力受付部への入力を受け付けない限りは、通常モードに切り替えない。これにより、消費電力の低減に貢献できる。
【0017】
被包装物投入部に投入された被包装物を、被包装物投入部に隣接する包装空間において上下に昇降させる昇降部をさらに備えることが好ましい。また、通常モードには、被包装物投入部又は昇降部に載せた被包装物を、手動で次の工程に移行させる移行手動制御が含まれることが好ましい。そして、モード切替部は、通常モードにおいて移行手動制御が行われており、被包装物投入部又は昇降部に被包装物が載っているときは、通常モードを第1スタンバイモードに切り替えないことが好ましい。
【0018】
ここで、例えば、移行手動制御において、被包装物投入部や昇降部に被包装物を載せたままの状態が維持されているような場合に、第1スタンバイモード(すなわち、加熱部材の温度が通常温度よりも下がっている状態)に入ると、次の工程に入る操作を行ったときに被包装物に対するフィルムの溶着が悪いものが出てくることが懸念される。そこで、このような状況のときには通常モードを第1スタンバイモードに切り替えないことで被包装物に対する溶着性を維持できる。
【0019】
また、複数の電気消費部品には、少なくとも被包装物の情報を表示する表示手段が含まれることが好ましい。そして、制御部は、表示手段への出力を制御する表示手段制御部をさらに有することが好ましい。表示手段制御部は、第1スタンバイモードにおいて非常停止状態となった場合に、表示手段への出力を停止することが好ましい。非常停止状態においては、ストレッチ包装装置が動作しないといった安全が確保できる状態にある。よって、安全が確保される状態のとき、且つ、人体検知手段によって作業者が作業を行っていない状態のときのみ、表示手段の出力を停止することで、作業者の安全を考慮しながら、省エネに貢献できる。
【0020】
また、例えば、通常モードにおいて、バックアップを行うと装置自体に負荷がかかり、作業者の作業効率に影響が出ることが懸念される。そこで、第1スタンバイモード又は第2スタンバイモードにおいて、バックアップを行うバックアップ実行部、をさらに備えることが好ましい。これにより、作業者の作業効率の低下を抑制できる。
【発明の効果】
【0021】
本発明に係るストレッチ包装装置では、より消費電力を低減できる。
【図面の簡単な説明】
【0022】
【図1】本発明の一実施形態であるストレッチ包装装置の外観斜視図。
【図2】ストレッチ包装装置の内部の正面概略図(フィルム差し込み板ユニットが第1位置を採る場合)。
【図3】図2のIII−IIIの矢視斜視図。
【図4】ストレッチ包装装置の内部の正面概略図(フィルム差し込み板ユニットが第2位置を採る場合)。
【図5】フィルム差し込み板ユニットの概略平面図。
【図6】ストレッチ包装装置の内部の平面概略図。
【図7】フィーダユニット及びフィーダ移動ユニットの相関図。
【図8】シール機構の平面図。
【図9】制御装置の制御ブロック図。
【図10】モードスケジュール作成動作を示すフローチャート。
【図11】電源が投入されてからのモードの切替動作を示すフローチャート(ステップS11〜ステップS20を示す)。
【図12】電源が投入されてからのモードの切替動作を示すフローチャート(ステップS21〜ステップS25を示す)。
【図13】ストレッチ包装装置の動作説明図。
【図14】ストレッチ包装装置の動作説明図。
【図15】ストレッチ包装装置の動作説明図。
【図16】ストレッチ包装装置の動作説明図。
【図17】ストレッチ包装装置の動作説明図。
【図18】第2実施形態に係るモードの切り替えを示すフローチャート。
【発明を実施するための形態】
【0023】
<第1実施形態>
以下、図面を参照しながら、本発明の一実施形態に係るストレッチ包装装置1について説明する。
【0024】
(1)ストレッチ包装装置1
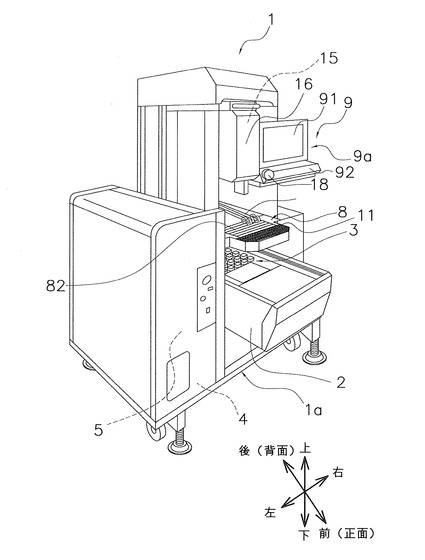
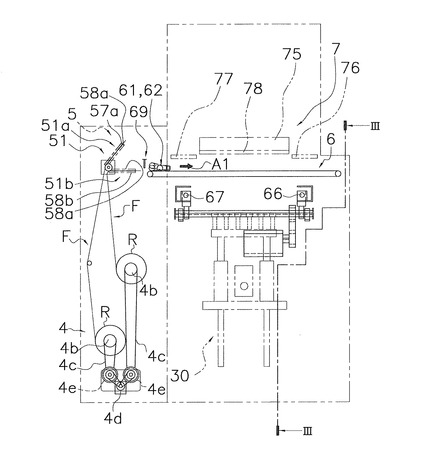
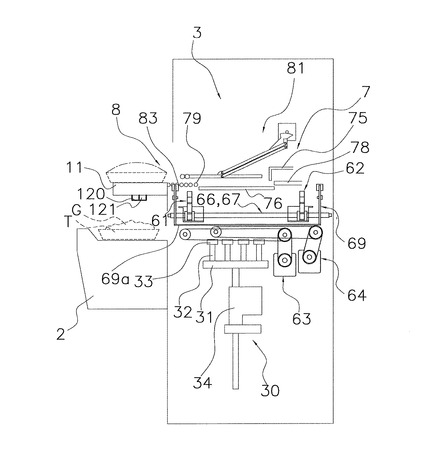
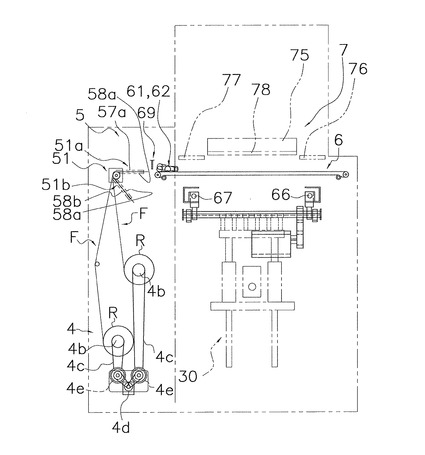
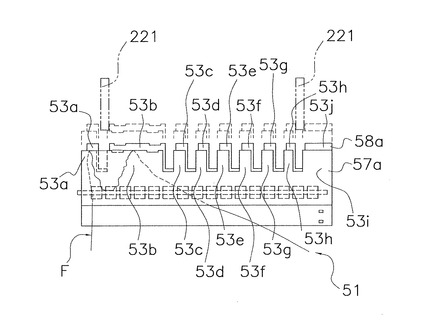
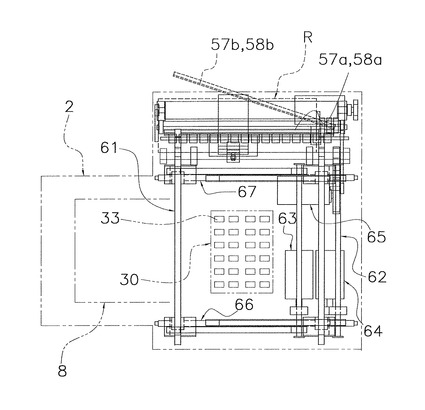
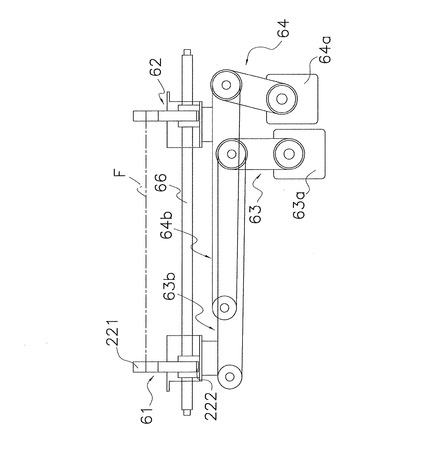
図1は、ストレッチ包装装置1の外観斜視図である。図2は、ストレッチ包装装置1の内部の正面概略図である(フィルム差し込み板ユニット51が第1位置を採る場合)。図3は、図2のIII−IIIの矢視斜視図である。図4は、ストレッチ包装装置1の内部の正面概略図である(フィルム差し込み板ユニット51が第2位置を採る場合)図5は、フィルム差し込み板ユニット51の概略側面図である。図6は、ストレッチ包装装置1の内部の平面概略図である。図7は、フィーダユニット61,62及びフィーダ移動ユニット63,64の相関図である。図8は、シール機構8の平面図である。
【0025】
以下の説明において、前後左右、上下、正面、背面といった方向を示す言葉を用いるが、当該方向は、特にことわりのない限り、図1の右下に示す方向を意味するものとする。
【0026】
まず、ストレッチ包装装置1について簡略に説明する。ストレッチ包装装置1は、緊張保持させた包装材としてのストレッチフィルムF(図2等を参照)に対して、生鮮食品等の商品G(図3等を参照)を収容したトレーT(図3等を参照)(これらは、包装材としてのフィルムFによって包装される被包装物である)を押し上げ、フィルムFの周辺部をトレーTの下側に折り込むことによってトレーTのフィルム包装を行う装置である。ストレッチ包装装置1は、フィルム包装機能に加えて、計量機能やラベル貼り付けによる値付け機能も兼ねている。なお、商品GがトレーTに収容されない状態で包装される場合もある。
【0027】
以下、ストレッチ包装装置1の構成について、図1〜図8を用いて説明する。
【0028】
ストレッチ包装装置1は、投入機構2と、包装ステーション3と、ロール支持機構4と、フィルム送り出し機構5と、フィルム搬送機構6と、折り込み機構7と、シール機構8と、排出台11と、検知機構12(図9を参照)とを備えている。
【0029】
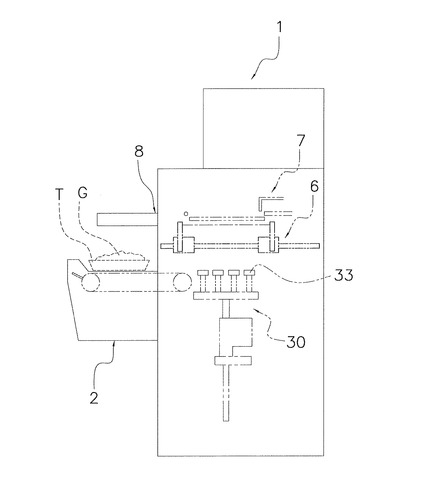
(1−1)投入機構2
投入機構2は、本体1aの正面中央部に設けられており、商品Gを収容したトレーTが本体1a内へ投入される投入部として機能する。投入機構2は、トレーTに収容された商品Gの重量を計量する計量器と、計量器上に載置される計量皿と、一対のローラ間に建設された複数の搬入ベルトとを有している。搬入ベルトには、搬送用の突起が設けられており、商品Gを収容したトレーTを、図3に示すように計量器上(計量皿上)に載置すれば、商品Gの重量が計量器により計量された後、トレーTが正面側から搬入ベルトに固定された突起に押されて、包装ステーション3のリフター機構30(後述する)の支持部材33上に送られる。
【0030】
なお、投入機構2では、計量皿が外れている状態では、所定の重量を満たないとして、ストレッチ包装装置1(すなわち、本体1a内の各機構)が動作しないように後述する制御装置9によって制御されている。しかし、作業者が計量器上に手を乗せる等を行って計量器上に所定の荷重がかかる場合、ストレッチ包装装置1が稼動してしまうことが懸念される。そこで、ここでは、後述するカメラ121が計量皿の検知を行い、計量皿が検知されない場合は、制御装置9は、計量器上に所定の荷重がかかったとしてもストレッチ包装装置1の動作を行わないようにしている。これにより、計量皿が外れているにも関わらず所定の計量器に所定の荷重がかかる場合のストレッチ包装装置1の稼動を防止している。
【0031】
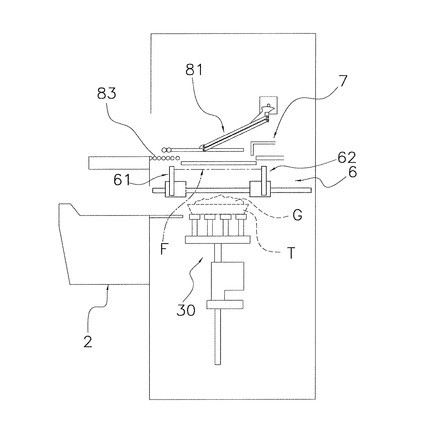
(1−2)包装ステーション3
包装ステーション3は、本体1a内に形成される包装空間であって、投入機構2に隣接している。包装ステーション3では、計量が終わった商品Gを含んだトレーTに一連のフィルム包装を行う包装処理が行われる。この包装ステーション3では、フィルム搬送機構6によってストレッチフィルムFが張られ、張られたストレッチフィルムFに対して、リフター機構30が商品Gが収容されたトレーTを押し付ける(図15を参照)。そして、折り込み機構7がストレッチフィルムFを押し付けた状態のトレーTの下側へとストレッチフィルムFの周囲の部分を折り込むことによって、トレーT及び商品GがストレッチフィルムFで覆われた状態となる。
【0032】
この包装ステーション3の下部には、リフター機構30が設けられている。リフター機構30は、トレーTの底面を保持してトレーT及び商品Gを上下に昇降する昇降部として機能する。
【0033】
リフター機構30は、図3に示すように、支持ベース31と、支持ベース31上に固定された複数の支持バー32と、各支持バー32の上端部にそれぞれ回動自在に支持されトレーTの底面を受ける支持部材33とを有している。また、リフター機構30の下部には、支持ベース31を上下移動させる電動ボールネジ機構34が配置される。
【0034】
なお、各支持バー32は、その中央部分に前後左右に折れ曲がるヒンジを備えており、当該ヒンジは、左右折り込み板76,77(後述する、図2や図3を参照)や後折り込み板78(後述する)がトレーTの下部に入ってくるときに一時的に転倒するように構成されている。
【0035】
また、包装ステーション3の上部には、押さえ機構81が配置されている。押さえ機構81は、電動ボールネジ機構34によって、リフター機構30に載っている商品G及びトレーTが突き上げられてとまったときにトレーTや商品Gが姿勢を崩して転倒することを抑える。
【0036】
(1−3)ロール支持機構4
ロール支持機構4は、フィルムロールRを支持する機構であり、図2に示すように、本体1aの側部(具体的には、左側部)に配置されている。フィルムロール機構4は、主として、2つのロールバー(図示せず)から構成されている。ロールバーは、フィルムロールRを挿通させ、ホルダー等でフィルムロールRを保持する。ロールバーは、本体1aに回転自在となるように支持されている。ロールバーの一端には、プーリ4bが固定されており、プーリ4bには、ベルト4cが掛けられている。2つのロールバーは、互いに上下左右方向にずれるように配置されている。
【0037】
ベルト4cは、1つのフィルムロール駆動モータ4dによって駆動される。フィルムロール駆動モータ4は、正逆回転が可能であり、正回転時に一方のロールバーに挿通されるフィルムロールRが回転されるように、他方、逆回転時に、他方のロールバーに挿通されるフィルムロールRが回転されるように駆動する。ベルト4cとフィルムロール駆動モータ4dとの間には、ワンウェイクラッチ4eが設けられている。
【0038】
(1−4)フィルム送り出し機構5
フィルム送り出し機構5は、フィルムロールRから引き出されたフィルムFを、搬送機構6(具体的には、後述する一対のフィーダユニット61,62)に送り出す(受け渡す)ための機構である。フィルム送り出し機構5は、図2や図5に示すように、主として、フィルム差し込み板ユニット51と、フィルム差し込み板ユニット51を、所定軸を支点として回動させるフィルム差し込み板駆動モータ(図示せず)とから構成されている。
【0039】
フィルム差し込み板ユニット51は、主として2枚の板部材57a,58aから構成される第1フィルム差し込み板51aと、主として2枚の板部材57b,58bから構成される第2フィルム差し込み板51bとを有する。
【0040】
フィルム差し込み板ユニット51は、フィルムロールRの上方に配置されており、フィルムロールRの長手方向に沿って延びている。なお、フィルム差し込み板ユニット51の長手方向の長さは、フィルムロールRの長手方向の長さよりも長い。
【0041】
2枚の板部材57a,58a、57b,58bには、それぞれ、切り欠き53a〜53iが形成されている(なお、図5では、板部材57a,58aのみを図示しているが、板部材57b,58bについても同様の構成である)。切り欠き53aと、切り欠き53b〜53iとの距離は、それぞれ、異なるフィルム幅の数種類のフィルムFに対応した距離となっている。例えば、切り欠き53aの外側と切り欠き53iの外側との距離は、最もフィルム幅が大きいフィルムFのフィルム幅に概ね一致している。
【0042】
2枚の板部材57a,58a、57b,58bは、それぞれ、一端が図示しないヒンジで連結されており、開閉が可能である。これにより、作業者は、フィルムFを、板部材57aと板部材58aとの間、板部材57bと板部材58bとの間に簡易に差し込むことができる。板部材57aと板部材58aとは、図5に示すように、略同形状である。板部材57bと板部材58bとも同様に、略同形状である。
【0043】
フィルム差し込み板駆動モータは、フィルム差し込み板ユニット51を、ヒンジ部分を軸として所定の範囲内で回動させる。フィルム差し込み板駆動モータによって、フィルム差し込み板ユニット51は、例えば、第1位置(図2の一点鎖線で示す位置)と、第1位置よりも下方に位置する第2位置(図4の二点鎖線で示す位置)とを採ることができる。具体的には、第1位置は、第2フィルム差し込み板51bがその長手方向が略水平方向に延びるような位置(後述するベルトユニット220と略平行になる位置)である。第2位置は、第1フィルム差し込み板51aが、その長手方向が略水平方向に延びるような位置(ベルトユニット220と略平行となる位置)である。
【0044】
なお、フィルム差し込み板ユニット51は、ストレッチ包装装置1が稼動している間は、第1位置及び第2位置のいずれかに位置する。フィルム差し込み板ユニット51の位置の選択は、2つ配置されるフィルムロールRのいずれを使用するかによって決定し、後述する制御装置9を介して作業者等が行う。より具体的には、フィルム差し込み板ユニット51は、上方に位置するフィルムロールRが選択される場合は、第1位置を採り、下方に位置するフィルムロールRが選択される場合は、第2位置を採る。
【0045】
また、フィルム差し込み板駆動モータは、フィルム差し込み板ユニット51を、フィルム搬送機構6側に水平に移動させる。これにより、フィルム搬送機構5は、フィルム搬送機構6にロール支持機構4で保持するフィルムFを受け渡すことができる。
【0046】
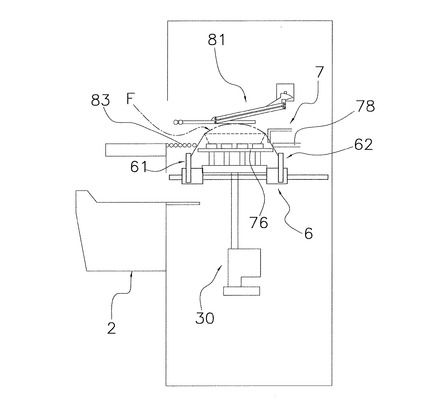
(1−5)フィルム搬送機構6
フィルム搬送機構6は、フィルム送り出し機構5から送られるフィルムFを受け取り、当該フィルムFを包装ステーション3の中央部分へと搬送する。フィルム搬送機構6は、フィルムFを包装ステーションへと搬送した後、後述する引き伸ばし動作を行うことでフィルムFを緊張保持する。フィルムFを緊張保持する。
【0047】
フィルム搬送機構6は、主として、第1フィーダユニット61と、第2フィーダユニット62と、第1フィーダ移動ユニット63と、第2フィーダ移動ユニット64と、フィーダ駆動ユニット65とを有する。
【0048】
図6に示すように、第1フィーダユニット61は、本体1aの正面側部分に配置されている。第2フィーダユニット62は、本体1aの背面側部分に配置されている。
【0049】
第1フィーダユニット61及び第2フィーダユニット62は、フィルム差し込み板ユニット51によって保持されるフィルムFの幅方向の両側部(すなわち、正面側部分及び背面側部分)を上下のベルトで挟み、フィーダ駆動ユニット65によってフィルムFを矢印A1(図2を参照)に示す方向へと搬送する。
【0050】
また、第1フィーダユニット61は、第1移動フィーダユニット63の作動により、第2フィーダユニット62は、第2移動フィーダユニット64の作動により、それぞれフィルムFの幅方向に移動するように構成されている。それぞれのフィーダユニット61,62は、フィルムFの幅方向に沿って伸びるスライドシャフト66,67によって、2箇所でフィルムFの幅方向に移動自在にされている。
【0051】
なお、図示していないが、第1及び第2フィーダユニット61,62は、複数のクランプを有している。これらのクランプは、ソレノイドによって作動し、フィルムFの把持及び把持の解除を行う。
【0052】
なお、フィルム搬送機構6のフィルム搬送方向の上流側には、図2や図4に示すように、カッター機構69が設けられている。カッター機構69は、フィルム送り出し機構5からフィルム搬送機構6へと受け渡されたフィルムFがフィルム搬送機構6で所定量搬送された後に、両機構5、6間においてフィルムFを切断するために設けられている。カッター機構69は、フィルムの幅よりも長い切断刃を有しており、当該切断刃をアクチュエータで移動させることによりフィルムFを切断する。
【0053】
(1−6)折り込み機構7
折り込み機構7は、包装ステーション3に搬送されたフィルムFによって、被包装物を包装する機構である。折り込み機構7は、図2や図3に示すように、左右折り込み板76,77と、後折り込み板78と、前折り込み棒79とを有する。
【0054】
左右折り込み板76,77は、フィルムFのフィルムの搬送方向の両端部をトレーTの底面側に折り込む。
【0055】
後折り込み板78は、フィルムFの第2フィーダユニット62側の側部をトレーTの底面側に折り込む。
【0056】
左右折り込み板76,77及び後折り込み板78は、図示しない折り込み板駆動モータ及びタイミングベルトによって水平移動が可能である。
【0057】
前折り込み棒79は、トレーTの排出時に、フィルムFの第1フィーダユニット61側の側部がトレーTの底面側に折り込まれるように配置されている。トレーTの排出は、排出プッシャー75がトレーTをシール機構8(前面側)に向けて押し出すことによって行われる。
【0058】
(1−7)シール機構8
シール機構8は、排出プッシャー75によって押し出されたトレーTの底面を熱してシールする。なお、このとき、上述の押さえ機構81は、商品Gが収容されたトレーTをシール機構8の上面に押し付ける役割も有している。
【0059】
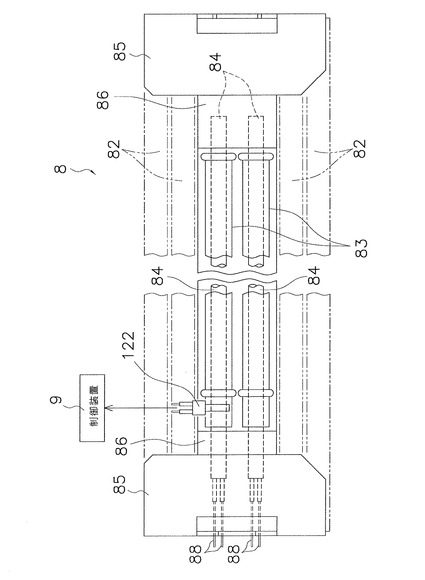
シール機構8は、図8に示すように、主として、搬送ローラ82と、加熱ローラ83と、ヒータ84と、ローラ支持部材85と、ヒータ支持部材86とを有する。
【0060】
搬送ローラ82は、2本の加熱ローラ83の前後に複数本が配置されている。搬送ローラ82は、左右一対のローラ支持部材85は、各ローラ82、83の両端を回転自在に支持している。また、加熱ローラ83は、筒状に形成されており、その内部に円柱状の電気式のヒータ84が挿入されている。ヒータ84は、いわゆるカートリッジヒータであり、加熱ローラ83と接触しておらず、両端がヒータ支持部材85に固定されている。これらのヒータ84の一端には、電極88が設けられている。後述する制御装置9によって当該電極に通電を行うことで、ヒータ84内の発熱コイルが発熱する。すなわち、加熱ローラ83は、ヒータ84によって加熱されている。加熱ローラ83がヒータ84によって加熱されることにより、加熱ローラ83を介して排出台11に排出される商品G及びトレーTの包装材であるフィルムFが、トレーTの下側で熱シールされる。すなわち、加熱ローラ83は、フィルムFを熱シールするための加熱部材としての役割を有する。
【0061】
(1−8)排出台11
シール機構8の正面側には、商品Gが収容されたトレーTが完全に包装された状態で排出される排出台11が設けられている。包装が完了されたトレーTには、ラベル発行機16が、ラベルプリンター15で印字処理されたラベルを貼り付ける。なお、ラベルには、商品Gの名称、重量、価格、加工日、消費期限等が印字される。
【0062】
(1−9)検知機構12
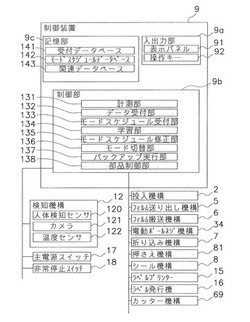
検知機構12は、主として、商品G及びトレーTを投入機構2の計量器上に載置する(すなわち、投入機構2への商品G及びトレーTの投入を行う)作業者の存在を検知する人体検知手段としての人体検知センサ120(図3や図9を参照)と、計量器上に載置されたトレーTのサイズ等を検知する撮像手段としてのカメラ121(図3や図9を参照)と、加熱ローラ83に接触し加熱ローラ83の外表面の温度を検知する温度検知手段としての温度センサ122(図8や図9を参照)とを有する。なお、検知機構12によって検知された各種のデータは、制御装置9に送信される。
【0063】
人体検知センサ120及びカメラ121は、排出台11の底面に設置されており、投入機構2の上方に配置されている。すなわち、人体検知センサ120及びカメラ121は、投入機構2及び排出台11の近傍に配置されている。
【0064】
人体検知センサ120は、具体的には、投光部(図示せず)と受光部(図示せず)とを有する。そして、人体検知センサ120は、受光部による受光が遮断されたときに、人体を検知している。なお、人体検知センサ120は、所定時間(例えば、3秒)の間、受光部による受光が遮断された場合に、人体を検知する。カメラ121は、人体検知センサ120の近傍に設置される。なお、検知機構12によって検知された各種の検知データは、後述する制御部9bに送信される。
【0065】
(2)制御装置9
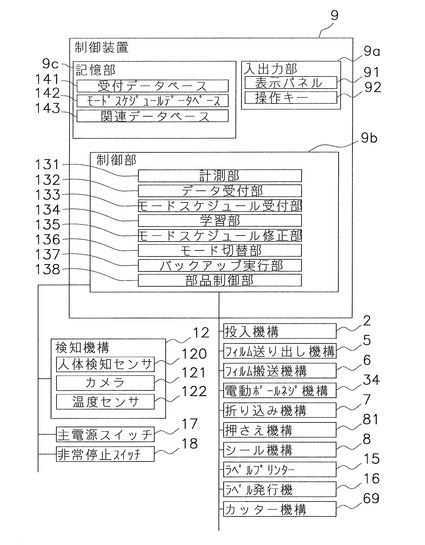
図9は、制御装置9の制御ブロック図である。
【0066】
制御装置9は、図1に示すように、本体1aの上方部分に配置される。制御装置9は、コンピュータから構成され、検知機構12や各種のスイッチ(主電源スイッチ17や、非常停止スイッチ18(図1を参照))による検知信号等を受けて、本体1aに配置される各機構の動作を制御する制御手段として機能する。なお、各機構とは、各種のモータ(具体的には、フィルム差し込み板駆動モータ、フィルムロール駆動モータ4d、折り込み板駆動モータ等)を冷却する冷却ファン(図示せず)、ヒータ84、後述する表示パネル91等を含む、電気を消費する電気消費部品をいう。
【0067】
制御装置9は、具体的には、図9に示すように、主として、入出力部9aと、制御部9bと、記憶部9cとを有する。
【0068】
(2−1)入出力部9a
入出力部9aは、主として、表示パネル91と、操作キー92とから構成される。表示パネル91は、商品Gの名称、商品Gの重量、商品Gの価格、ヒータ84の温度等の情報を表示する表示手段であり、バックライトを有している。バックライトは、発光素子(例えば、LED素子)と反射板と導光板とを有する。表示パネル91は、タッチパネル式であり、作業者の入力を受け付ける操作ボタンも配される。すなわち、表示パネル91は、キーボードから構成される操作キー92とともに、作業者の入力を受け付ける入力受付部としても機能する。
【0069】
(2−2)制御部9b
制御部9bは、CPU等から構成され、主として、計測部131と、データ受付部132と、モードスケジュール作成部133と、学習部134と、モードスケジュール修正部135と、モード切替部136と、バックアップ実行部137と、部品制御部138として機能する。
【0070】
(2−2−1)計測部131
計測部131は、時刻、日、月、年、曜日などの時間的要素を計測する。すなわち、計測部131は、時計やカレンダーとして機能する。
【0071】
(2−2−2)データ受付部132
データ受付部132は、検知機構12によって検知された各種の検知データ、入出力部9aを介して行われる作業者による入力データ、外部装置から転送される転送データ等を受け付ける。そして、受け付けた各種のデータを、後述する受付データベース141に格納する。
【0072】
(2−2−3)モードスケジュール受付部133
モードスケジュール受付部133は、制御装置9の入出力部9aを介して作業者によって入力される入力データのうち、モードスケジュールのデータを受け付ける。すなわち、まず、作業者によって、入出力部9aを介したモードスケジュールの初期設定が行われる。ここで、モードスケジュールとは、各種のモードを行う時間帯や当該時間帯の開始時刻を決定したスケジュールである。
【0073】
ここで、モードには、通常モードと、第1スタンバイモードと、第2スタンバイモードとが存在する。第1スタンバイモード及び第2スタンバイモードは、消費電力を通常モードにおける通常消費電力よりも抑える省電力モードである。具体的には、第2スタンバイモードは、通常モードにおいて前回の商品G及びトレーTが排出台11に排出されてから所定時間(作業者によって入出力部9aを介して入力され、記憶部9cに記憶される任意の値)を経過しても次回の商品G及びトレーTが排出されない場合に、通常モードから自動的に切り替えられる省電力モードである。第1スタンバイモードとは、第2スタンバイモードよりも消費電力を抑える省電力モードをいう。第1スタンバイモード及び第2スタンバイモードにおける制御については後述する。なお、ここでの通常モードとは、第1スタンバイモードや第2スタンバイモードのような省電力を目的としたモードではない通常のモードのことをいう。
【0074】
なお、第2スタンバイモードは自動的に切り替えられるモードであるため、モードスケジュールの初期設定では、通常モードを行う通常モード時間帯や通常モード時間帯を開始する通常モード開始時刻と、第1スタンバイモードを行う第1スタンバイモード時間帯や第1スタンバイモード時間帯を開始する第1スタンバイモード開始時刻第1スタンバイモード開始時刻と(すなわち、通常モード及び第1スタンバイモードのモードスケジュール)が設定される。モードスケジュール受付部133によって受け付けられたモードスケジュールは、後述するモードスケジュールデータベース142に格納される。
【0075】
(2−2−4)学習部134
学習部134は、時間や時間帯と、人体検知センサ120による検知結果との関係を学習する。具体的には、計測部131によって計測される時間的要素のデータ(ひいては、これに基づいて算出する時間帯のデータ)と、受付データベース141に格納された人体検知センサ120による検知データとを読み込むことによって、時間や時間帯と、作業者による商品G及びトレーTの投入機構2への投入/非投入との関係を学習する。すなわち、人体検知センサ120は、商品G及びトレーTの投入機構2への投入を行うために投入機構2の近傍に位置する作業者を検知するので、学習部134は、人体検知センサ120による検知データと時間的要素のデータとを関連付けることで、作業者が商品G及びトレーTを投入機構2へ投入する/投入しない時間や時間帯を学習できる。
【0076】
具体的には、例えば、学習部134は、所定時間(例えば、1日)毎に、ほぼ、時刻9:00〜12:00、13:00〜16:00の間は、作業者は商品G及びトレーTの投入を行い、時刻12:00〜13:00の間は、作業者は商品G及びトレーTの投入を行っていないことを学習する。なお、ここでは、時間的要素のデータと人体検知センサ120による検知データとが学習部134によって関連付けられたデータを関連データという。当該関連データは、後述する関連データベース143に格納される。
【0077】
(2−2−5)モードスケジュール修正部135
モードスケジュール修正部135は、学習部134による学習に基づいて(具体的には、関連データベース144に記憶される関連データを読み込むことによって)、所定時間(例えば、1日)毎に、モードスケジュールデータベース142に記憶されるモードスケジュールを修正する。そして、当該修正したモードスケジュールを最新のモードスケジュールとして、モードスケジュールデータベース142に格納する。すなわち、モードスケジュール修正部135は、最新のモードスケジュールを作成する機能を有する。よって、モードスケジュール修正部135は、学習部134による学習が増えれば増える程(関連データが関連データベース143に蓄積されればされる程)、より作業者の投入作業に合わせたモードスケジュールに修正できる。
【0078】
具体的には、モードスケジュール修正部135は、通常モード時間帯や通常モード開始時刻と第1スタンバイモード時間帯や第1スタンバイモード開始時刻とを修正する。例えば、学習部134によって上述の例のようなスケジュールが学習されたとすると、モードスケジュール修正部135は、電源が投入されるとすぐに第1スタンバイモードとし、9:00〜12:00、13:00〜16:00を通常モード時間帯(9:00、13:00を通常モード開始時刻)とし、12:00〜13:00、16:00〜電源が落とされるまでを第1スタンバイモード時間帯(12:00、16:00を第1スタンバイモード開始時刻)とする、といったモードスケジュールを作成する。
【0079】
(2−2−6)モード切替部136
モード切替部136は、通常モードと、第1スタンバイモードと、第2スタンバイモードとを切り替える。モード切替部136によるモードの切替動作については、後述する。
【0080】
(2−2−7)バックアップ実行部137
バックアップ実行部137は、第1スタンバイモード及び第2スタンバイモードにおいて、バックアップを実行する。
【0081】
バックアップの実行は、ストレッチ包装装置1にとって少なくとも負荷がかかる作業である。よって、バックアップ実行部137は、作業者が投入作業を行っていない第1スタンバイモード及び第2スタンバイモード中に当該バックアップ作業を行っている。
【0082】
バックアップを行うデータの具体例としては、以下に示すようなものが挙げられる。
【0083】
まず、ラベルプリンター15の走行距離、包装回数(商品G及びトレーTが投入されてから包装が完了されるまでを1回とする)、エラーログ等のデータである。これらのデータをバックアップすることにより、メンテナンスを行うタイミングを決定できる。
【0084】
次に、ラベルに印字した各種のデータ(上述した商品Gの名称・重量・価格や加工日等)である。当該データをバックアップすることにより、ラベルに印字された日付等がいつから実際の値とずれているか等を知ることができる。
【0085】
また、ラベルに印字した各種のデータに基づいて、制御部9bが商品Gの価格を合計することにより、生産実績を算出できる。そして、当該生産実績から廃棄実績(廃棄された商品Gの合計金額)を控除することにより、概ねの売上実績を算出できる。これにより、各店舗等の売上分析にも貢献できる。
【0086】
次に、ストレッチ包装装置1のセットアップのための基本的なデータであるマスターデータ(商品マスタ、トレーマスタ等)である。商品マスタ及びトレーマスタは、リンクされており、ある商品Gに対応するトレーTを呼び出すことができる。マスターデータは、随時更新ができるようになっている。マスターデータをバックアップすることにより、万が一、ストレッチ包装装置1が故障したような場合、前回バックアップしたマスターデータに設定できる。すなわち、直近の設定データに復帰できる。
【0087】
(2−2−8)部品制御部138
部品制御部138は、複数の電気消費部品を制御する。
【0088】
(2−3)記憶部9c
記憶部9cは、RAMやROM等から構成される。記憶部9cは、主として、受付データベース141と、モードスケジュールデータベース142と、関連データベース143とを有する。
【0089】
(2−3−1)受付データベース141
受付データベース141には、検知機構12や他の各種のセンサによる検知データ、入出力部9aを介して作業者により入力された入力データ、外部装置から転送された転送データ等が記憶されている。
【0090】
(2−3−2)モードスケジュールデータベース142
モードスケジュールデータベース142には、上記のモードスケジュールが記憶されている。なお、モードスケジュールデータベース142には、常に最新のモードスケジュールが記憶されているとする。
【0091】
(2−3−3)関連データベース143
関連データベース143には、上記の関連データが記憶されている。
【0092】
(2−4)制御装置9におけるモードスケジュールの作成動作
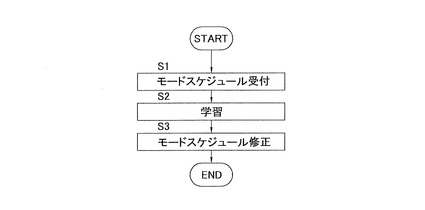
図10は、制御装置9におけるモードスケジュール作成動作を示すフローチャートである。以下、図10を用いて、モードスケジュールの作成動作について説明する。
【0093】
まず、ステップS1では、モードスケジュール受付部133が、上述のように、モードスケジュールを受け付ける。そして、モードスケジュール受付部133は、当該受け付けたモードスケジュールを、モードスケジュールデータベース142に格納する。
【0094】
ステップS2では、学習部134が、上述の学習を行う。
【0095】
ステップS3では、モードスケジュール修正部135が、学習部134による学習に基づいて、モードスケジュールデータベース142に記憶されているモードスケジュールを修正する。そして、当該修正したモードスケジュールを、最新のモードスケジュールとして、モードスケジュールデータベース142に格納する。
【0096】
以上により、最新のモードスケジュール、すなわち、通常モード時間帯や通常モード開始時刻及び第1スタンバイモード時間帯や第1スタンバイモード開始時刻が決定される。
【0097】
(2−5)モード切替部136による切替動作
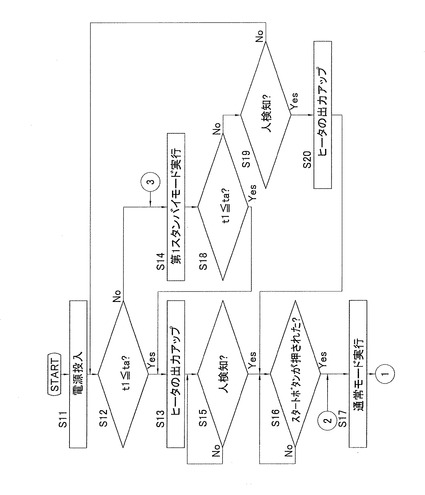
図11及び図12は、電源が投入されてからのストレッチ包装装置1の動作を示すフローチャートである。以下、図11及び図12を用いて、ストレッチ包装装置1の動作を説明する。
【0098】
まず、ステップS11では、ストレッチ包装装置1の電源が投入される。すなわち、主電源スイッチ17が押される。
【0099】
ステップS12では、モード切替部136が、通常モード時間帯を開始する通常モード開始時刻から計測部131によって計測される現在の時刻を引いた値t1が所定時間ta(作業者によって制御装置9の入出力部9aを介して入力される任意の値)以下(t1≦ta)であるか否かを判定する。
【0100】
具体的には、例えば、モードスケジュールにおいて通常モード時間帯が9:00〜12:00とされている場合であって、現在時刻が8:45である場合、モード切替部136は、9:00から8:45を引いた15分が所定時間ta以下であるか否かを判定する。t1≦taであると判定する場合には、ステップS13へ移行し、他方、t1≦taでないと判定する場合は、ステップS14を実行する。
【0101】
ここでは、通常モード開始時刻まで所定時間以内か否か、或いは、通常モード開始時刻を過ぎているか否かを判定している。
【0102】
ステップS13では、部品制御部138が、加熱ローラ83の温度が通常モードにおける通常温度(例えば、130℃)に近付くように、ヒータ84の出力を制御する(具体的には、ヒータ84の出力を上げる)。具体的には、加熱ローラ83の温度が所定温度(例えば、110℃)になるように、ヒータ84の出力を上げる。すなわち、ここでは、通常モード開始時刻の所定時間ta前からヒータ84の出力を上げることによって、作業者が投入作業を行うと考えられる時間には加熱ローラ83の温度を通常温度に近い温度まであげることができる。よって、ストレッチ装置1の使用を早く開始できる。
【0103】
ここで、所定時間taとは、ヒータ84の出力を制御することによって、通常モード開始時刻において、加熱ローラ83の温度が通常温度に近付く温度にできる時間である。
【0104】
ステップS14では、モード切替部136が、モードスケジュールに沿ってモードを実行する。すなわち、通常モード時間帯までは第1スタンバイモード時間帯となるので、モード切替部136は、第1スタンバイモードを実行する。ここでは、通常モード開始時刻までまだ時間があると考えられるので、消費電力を抑制できる第1スタンバイモードを行う。よって、省エネに貢献できる。
【0105】
第1スタンバイモードでは、部品制御部138は、冷却ファンを駆動するためのモータ及び表示パネル91のバックライトへの出力を停止し、加熱ローラ83の温度が第1温度(例えば、10℃)となるようにヒータ84の出力を制御する。すなわち、部品制御部138は、冷却ファンを駆動する駆動手段を制御する駆動手段制御部や表示パネル91への出力を制御する表示手段制御部として機能する。
【0106】
ステップS15では、モード切替部136が、人体検知センサ120によって作業者が検知されたか否かを判定する。検知されたと判定する場合は、ステップS16へ移行し、他方、検知されていないと判定する場合は、作業者が検知されるまで待機する。
【0107】
ステップS16では、部品制御部138がバックライトへの出力を上げると共に、モード切替部136が、表示パネル91に配されるスタートボタンが押されたか否かを判定する。なお、スタートボタンは、通常モードを開始する、又は、現在の実行中のモードを解除して通常モードに切り替えるためのボタンであり、表示パネル91又は操作キー92上に配される。
【0108】
なお、作業者によって表示パネル91のスタートボタンが押されると、データ受付部132が当該入力データを受け付ける。そして、モード切替部136は、当該入力データを受けることによって、スタートボタンが押されたと判定し、通常モードを実行する(ステップS17)。すなわち、部品制御部138は、冷却ファンを駆動するためのモータへの出力を開始し、加熱ローラ83の温度が通常温度となるようにヒータ84の出力を制御する。なお、第2スタンバイモードから通常モードへ切り替えるときは、当該切替と同時に、部品制御部138が、表示パネル91のバックライトへの出力も開始する。
【0109】
他方、スタートボタンが押されていないと判定する場合は、スタートボタンが押されるまで待機する。
【0110】
ステップS18では、モード切替部136が、通常モード時間帯を開始する通常モード開始時刻から現在の時刻を引いた値t1が所定時間ta(作業者によって制御装置9の入出力部9aを介して入力される任意の値)以下(t1≦ta)であるか否かを判定する。
【0111】
t1≦taであると判定する場合は、ステップS13へ移行する。t1≦taでないと判定する場合は、ステップS19へ移行する。
【0112】
ステップS19では、モード切替部136が、作業者が検知されたか否かを判定する。検知されたと判定する場合は、ステップS20へ移行し、ステップS13と同様に、ヒータ84の出力を上げる。そして、ステップS16へ移行する。他方、検知されていないと判定する場合は、ステップS12へ移行する。
【0113】
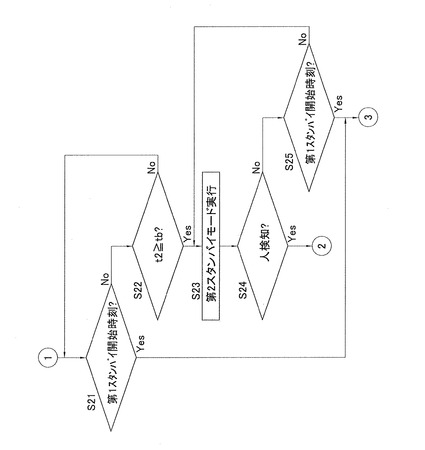
ステップS17で通常モードを実行すると、ステップS21へ移行する。
【0114】
ステップS21では、モード切替部136が、現在時刻が第1スタンバイモード開始時刻になったか否かを判定する。なったと判定する場合は、ステップS14へ移行して第1スタンバイモードを実行する。作業者が検知され且つスタートボタンが押されなければ、通常モード開始時刻の所定時間ta前になるまでは、第1スタンバイモードが行われる。
【0115】
他方、第1スタンバイモード開始時刻になっていないと判定する場合は、ステップS22へ移行する。
【0116】
ステップS22では、モード切替部136が、前回の商品G及びトレーTが排出台11に排出されてからの経過時間t2が、所定時間tb(作業者によって入出力部9aを介して入力され、記憶部9cに記憶される任意の値)以上(t2≧tb)であるか否かを判定する。t2≧tbであると判定する場合は、ステップS23へ移行し、第2スタンバイモードを実行する。他方、t2≧tbでないと判定する場合は、通常モードを維持する。
【0117】
ここで、第2スタンバイモードにおいては、部品制御部138は、冷却ファンを駆動するためのモータ及び表示パネル91のバックライトへの出力を停止し、加熱ローラ83の温度が第2温度(例えば、110℃)となるようにヒータ84の出力を制御する。
【0118】
ステップS24では、モード切替部136が、作業者が検知されたか否かを判定する。検知されたと判定する場合は、ステップS17へ移行して通常モードを実行する。他方、検知されていないと判定する場合は、ステップS25へ移行する。
【0119】
ステップS25では、モード切替部136が、現在時刻が第1スタンバイモード開始時刻になったか否かを判定する。なったと判定する場合は、ステップS14へ移行して第1スタンバイモードを実行する。なっていないと判定する場合は、ステップS23へ移行して第2スタンバイモードを維持する。
【0120】
なお、以上に説明した一連の動作は、電源が落とされるまで行われる。
【0121】
(3)ストレッチ包装装置1の全体の概略動作
図13〜図17は、ストレッチ包装装置1の動作を説明するための説明図である。
【0122】
以下、上記のような構成を有するストレッチ包装装置1の動作について図13〜図17を用いて説明する。なお、以下の駆動動作は、制御装置9によって行われるものとする。
【0123】
まず、図13に示すように作業者が商品Gを収容したトレーTを投入機構2の計量器上に載せると、計量値が安定して計量が完了するのを待って、搬入ベルトが動き出す。この搬入ベルトの動きにしたがって搬入ベルトに固定されている突起が前面側から背面側へと移動する。これにより、計量器上に載せられた商品Gは、リフター機構30の支持部材33上に押し出される(図14を参照)。
【0124】
一方、フィルムロールRからフィルム送り出し機構5によりフィルム搬送機構6へと受け渡されたフィルムFは、第1フィーダユニット61及び第2フィーダユニット62によってリフター機構30の上方まで運ばれる。そして、リフター機構30の上方において、各クランプの作動によりフィルムFの幅方向の両側部が把持された状態となっている。
【0125】
そして、各クランプにより把持されたフィルムFに対して、ボールネジ機構34が商品Gを収容したトレーTを載せたリフター機構30を押し上げる(図15を参照)。これにより、各クランプにより保持されたフィルムFは、商品G及びトレーTの上部を覆うように伸張する。
【0126】
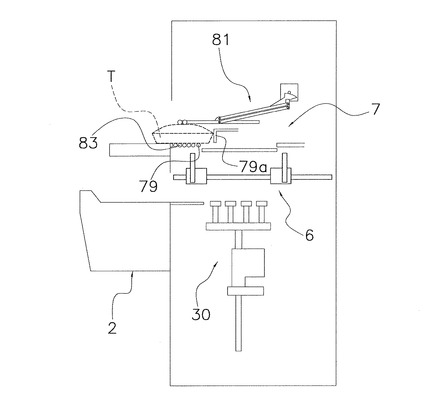
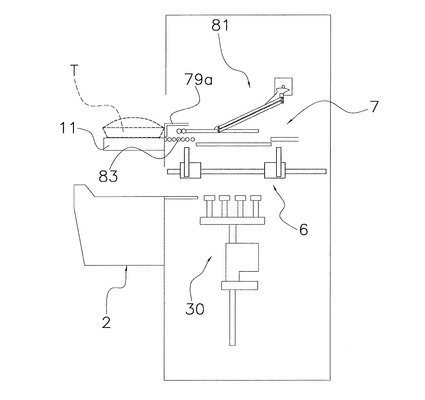
この状態において、後折り込み板78及び左右折り込み板76,77がトレーTの下側に水平移動すると、適当なタイミングで各クランプがフィルムFの保持を解除して、フィルムFの周囲3辺がトレーTの下側に折り込まれる(図16を参照)。そして、排出プッシャー79aがトレーTをシール機構8側に押し出すと、折り込まれていなかった正面側のフィルムFの1辺が前折り込み棒79に当たり、シール機構8側へのトレーTの移動に従ってトレーTの下側に折り込まれていく。なお、正面側のクランプは、このときにフィルムFの保持が解除される。また、この移動中に、トレーTの下側に折り込まれたフィルムFが加熱ローラ83によって熱シールされ、図17に示す位置に排出されたとき(排出台11に排出されたとき)には、商品G及びトレーT全体をフィルムFが覆った包装完了の状態となる。
【0127】
さらに、計量値に基づいて算出される商品の値段や重量等がラベルプリンター15によりラベルに印字される。そして、当該ラベルが、ラベル発行機16により包装が完了されたトレーTに貼り付けされる。
【0128】
(4)特徴
(4−1)
本実施形態のストレッチ包装装置1では、包装材であるフィルムFによって包装される商品G及びトレーTのような被包装材が投入される投入機構2、及び、投入された商品G及びトレーTをフィルムFによって包装して排出するための排出台11の近傍に、人体検知センサ120が配置されている。人体検知センサ120は、投入機構2へ商品G及びトレーTを投入する作業者の存在を検知する。
【0129】
そして、本実施形態のストレッチ包装装置1では、通常モードと、通常モードよりも大きく消費電力を抑える省電力モードである第1スタンバイモードとが存在する。
【0130】
本実施形態では、学習部134が、時間と人体検知センサ120による検知結果との関係を学習する。そして、モードスケジュール修正部135が、学習部134による学習に基づいて、モードスケジュール、すなわち、第1スタンバイモードを行う第1スタンバイモード時間帯や第1スタンバイモード開始時刻を決定する。
【0131】
そして、当該モードスケジュールに基づいて、モード切替部136が当該複数のモードを切り替える。
【0132】
ここでは、学習部134が時間と人体検知センサ120による検知結果との関係を学習することによって、モードスケジュール修正部135は、作業者の投入作業に合わせて通常モードと省電力モードとを切り替えることができるモードスケジュールを決定できる。
【0133】
よって、作業者が投入作業を行わないと考えられる時間帯において、通常モードにおける通常電力と比べて大きく消費電力を抑制できる第1スタンバイモードを行うことができる。よって、消費電力を低減でき、省エネ及び省コストに貢献する。
【0134】
(4−2)
本実施形態では、排出台11の近傍に、商品G及びトレーTを包装するフィルムFを熱シールするための加熱ローラ83が配置されている。そして、加熱ローラ83は当該加熱ローラ83を加熱するための加熱手段であるヒータ84によって加熱される。
【0135】
そして、部品制御部138は、第1スタンバイモードでは、加熱ローラ83の温度が通常温度(例えば、130℃)よりも低い第1温度(例えば、10℃)になるように、第2スタンバイモードでは、加熱ローラ83の温度が第1温度よりも高く通常温度よりも低い第2温度(例えば、110℃)になるように、ヒータ84を制御する。
【0136】
ストレッチ包装装置では、ヒータの消費電力は、全消費電力の8−9割程度を占めるといわれている。よって、作業者が作業を行わない第1スタンバイモードにおいてヒータ84の出力を通常モードよりも大きく抑えることで、消費電力を低減できる。
【0137】
(4−3)
本実施形態では、部品制御部138は、第1スタンバイモード時間帯が終了する所定時間前から、加熱ローラ83の温度が第1温度から通常温度に近付くように制御する。
【0138】
ここでは、モードスケジュールによれば、第1スタンバイモード時間帯が終了した後は、通常モードが開始される。よって、作業者が投入作業を行うと考えられる時間帯に合わせてヒータ84を制御することで、作業者が投入作業を行うと考えられる時間には加熱ローラ83の温度を通常温度に近い温度まで上げることができる。例えば、12:00〜13:00までは、お昼休みに入るといったような作業者のスケジュールがある場合、お昼休みを終えて戻ってきた作業者が作業を行うまでのストレッチ包装装置1の立ち上げを早くできる。よって、ストレッチ包装装置1の使用を早くできる。
【0139】
また、本実施形態では、通常モード時間帯の所定時間前から加熱ローラ83の温度が第1温度から通常温度に近付くように制御する。これによっても上述と同様の効果を奏する。
【0140】
(4−4)
作業者の諸事情により、一時的に投入作業を行わない時間があると考えられる。
【0141】
そこで、本実施形態では、モード切替部136は、通常モードにおいて前回の商品G及びトレーTが排出されてから所定時間tbを経過しても次回の商品G及びトレーTが排出されない場合に、通常モードから第1スタンバイモードに切り替える。
【0142】
これにより、作業者が投入作業を一時的に行わない間の消費電力も低減できる。
【0143】
(4−5)
本実施形態では、入出力部9aは、第1スタンバイモードにおいて人体検知センサ120が作業者の存在を検知した場合に、通常モードへ移行するか否かの入力を受け付ける。そして、入出力部9aが当該入力を受け付けた場合、モード切替部136が、第1スタンバイモードを通常モードに切り替える。
【0144】
ここでは、例えば、モードスケジュール(第1スタンバイモード時間帯や第1スタンバイモード開始時刻)が決定されていても、当該時間帯に作業者が投入作業を行うことが考えられる。この場合であっても、通常モードへの移行の入力を受け付けることにより、投入作業を開始できる。他方、第1スタンバイモードにおいて、ストレッチ包装装置1の近傍に作業者が立っており、人体検知センサ120が当該作業者を検知したとしても、入出力部9aを介した入力を受け付けない限りは、通常モードには切り替えない。これにより、消費電力の低減に貢献できる。
【0145】
(4−6)
バックアップの実行は、ストレッチ包装装置にとって少なくとも負荷がかかる作業である。このため、作業者の作業効率に影響が出ることが懸念される。
【0146】
そこで、本実施形態では、バックアップ実行部137は、作業者が投入作業を行っていない第1スタンバイモード及び第2スタンバイモードにおいて、バックアップを実行する。これにより、作業者の作業効率を維持できる。
【0147】
(4−7)
本実施形態では、電源が投入されてから電源が落とされるまで、モード切替部136によって各種のモードが切り替えられる。よって、例えば、ストレッチ包装装置1の電源を1日中入れたままにしたいという店舗等においては、上述の制御を行うことで作業者が作業を行わない時間帯の消費電力を抑制できるので、有用である。
【0148】
(5)変形例
以上、本発明の実施形態について図面に基づいて説明したが、具体的な構成は、上記の実施形態に限られるものではなく、発明の要旨を逸脱しない範囲で変更可能である。
【0149】
(5−1)変形例1A
上記実施形態では、人体検知センサ120は、投入機構2及び排出台11の近傍に配置されると説明したが、投入機構2又は排出台11の近傍に配置されていればよい。
【0150】
(5−2)変形例1B
上記実施形態では、まず、作業者によってモードスケジュールの初期設定が行われると説明したが、初期設定を行わなくてもよい。例えば、ある一日の投入作業が行われる/行われない時間帯を人体検知センサ120を用いて学習部134が学習することによって、翌日以降のモードスケジュールをモードスケジュール修正部135が作成していってもよい。
【0151】
(5−3)変形例1C
上記実施形態では、モードには、通常モードと、第1スタンバイモードと、第2スタンバイモードとがあると説明したが、これに限られるものではなく、第1スタンバイモードのような省電力モードを増やしてもよい。すなわち、消費電力を段階的に所定電力にするモードを増やしてもよい。例えば、第3スタンバイモードでは、加熱ローラ83の温度が第3温度(例えば、90℃)になるように、第4スタンバイモードでは、加熱ローラ83の温度が第4温度(例えば、70℃)になるように、第5スタンバイモードでは、加熱ローラ83の温度が第5温度(例えば、50℃)になるように、部品制御部138がヒータ84の出力を制御してもよい。
【0152】
(5−4)変形例1D
上記実施形態では、第1スタンバイモードでは、部品制御部138は、加熱ローラ83の温度が第1温度(例えば、10℃)となるようにヒータ84への出力を制御すると説明したが、これに限られるものではなく、第2スタンバイモードにおける第2温度(例えば、110℃)より低ければよい。よって、例えば、ヒータ84への出力を停止してもよい(すなわち、加熱ローラ83の温度が0℃となるように制御してもよい)。
【0153】
(5−5)変形例1E
上記実施形態の通常モードにおいて、作業者が制御装置9に対して入力を行うことによって、投入機構2又はリフター機構30に載せた商品G及びトレーTを、手動で次の工程(次の工程だけでなく、それ以降の工程を行うようにしてもよい)に移行させる移行手動制御が行われてもよい。
【0154】
この場合、モード切替部136は、投入機構2又はリフター機構30に商品G及びトレーTが載っているときは、通常モードを第1スタンバイモードに切り替えない。なお、この場合、投入機構2又はリフター機構30に商品G及びトレーTが載っていることはフラグ等が立てられることにより制御装置9が把握できる。
【0155】
ここでは、例えば、移行手動制御において投入機構やリフター機構に商品及びトレーが載ったままの状態が維持されるような場合(すなわち、作業者が商品及びトレーを載せたことを忘れてストレッチ包装装置から離れているような場合)に、第1スタンバイモード(すなわち、加熱ローラの温度が通常温度よりも比較的下がっている状態)に入ると、次以降の工程に入る操作を行う(作業を再開した)ときに、商品及びトレーに対するフィルムの溶着が悪いものが出てくることが懸念される。そこで、このような状況を避けるために、投入機構2又はリフター機構30に商品G及びトレーTが載っているときは通常モードを第1スタンバイモードに切り替えないようにすることで、商品G及びトレーTに対するフィルムFの溶着性を維持できる。
【0156】
(5−6)変形例1F
ストレッチ包装装置では、安全面の確保のために、電源のON/OFFや、現在のモード状態等を作業者に報知できる状態にあることが好ましい。一方、省エネの観点から、作業者が作業を行っていないときの不要な電力を低減したいという要求が存在する。
【0157】
そこで、上記実施形態では、第1スタンバイモードにおいて表示パネル91のバックライトへの出力を停止しているが、例えば、第1スタンバイモードにおいて(すなわち、作業者の存在が検知されない状態において)、非常停止スイッチ18が押されている状態(すなわち、非常停止状態)のときのみ、表示パネル91のバックライトへの出力を停止してもよい。
【0158】
非常停止状態においては、表示パネル91のバックライト以外の電気消費部品は、停止されている状態にあるため、ストレッチ包装装置1が動作しないといった安全が確保できる状態にある。よって、安全が確保される状態のとき、且つ、人体検知センサ120によって作業者の存在が検知されない状態のときのみ、表示パネル91のバックライトへの出力を停止することで、上述の要求に応えることができる。
【0159】
(5−7)変形例1G
上記実施形態以外にも、第1スタンバイモード及び第2スタンバイモードにおいては、ラベルプリンター15を駆動するモータへの出力を停止(具体的には、ホールド電流を流さないように)してもよい。
【0160】
(5−8)変形例1H
上記実施形態では、部品制御部138は、ステップS13でヒータ84の出力を上げてからステップS15でバックライトへの出力をあげると説明したが、バックライトの出力を上げるのは、ヒータ84の出力を上げるのと同時であってもよい。
【0161】
(5−9)変形例1I
上記実施形態では、第1スタンバイモード及び第2スタンバイモード中にバックアップ作業を行っていると説明したが、第1スタンバイモード及び第2スタンバイモードにおいては、その他の作業を行ってもよい。
【0162】
その他の作業としては、例えば、外部の装置(例えば、遠隔監視装置等の上位システム)とのデータ(バックアップのデータ等)通信が考えられる。当該作業はバックアップ作業と同様にストレッチ包装装置1にとって負荷のかかる作業であると考えられるが、作業者が投入作業を行っていない第1スタンバイモード及び第2スタンバイモード中に当該作業を行うことで、作業者の作業効率を維持できる。
【0163】
(5−10)変形例1J
上記実施形態では、1日毎にモードスケジュールを修正し、当該モードスケジュールに基づいて翌日のモードスケジュールを決定することを例にとって説明したが、これに限られるものではない。例えば、ある曜日のみ所定のスケジュールに基づいて作業者が作業を行っているということを学習部134が学習すれば、モードスケジュール修正部135は、当該曜日はその学習に基づいたモードスケジュールを決定してもよい。
【0164】
(5−11)変形例1K
上記実施形態では、第1スタンバイモードにおいて人体検知センサ120によって作業者の存在が検知され、且つ、スタートボタンが押されたときに、通常モードへ移行すると説明した。しかし、これに限られるものではない。
【0165】
例えば、非常停止スイッチ18が押されているときに第1スタンバイモードに移行している場合は、非常停止状態を解除されたか否かを判定し、解除されていると判定した場合に、通常モードに移行してもよい。
【0166】
(5−12)変形例1L
上記実施形態では、表示パネル91又は操作キー92上に配されるスタートボタンが押されることにより、通常モードを実行すると説明したが、これに限られるものではなく、スタートボタンは、ストレッチ包装装置1の本体1aのどこに配されていてもよい。
【0167】
<第2実施形態>
続いて、本発明の第2実施形態について説明する。
【0168】
第1実施形態では、人体検知センサ120による検知結果を学習部134が学習している。そして、当該学習に基づいてモードスケジュール修正部135が作成したモードスケジュールに基づいて、モード切替部136が、通常モードと第1スタンバイモードとを切り替えている。一方、第2実施形態について簡単に説明すると、人体検知センサ120による検知結果に基づいて、モード切替部136が、通常モードと通常モードよりも消費電力を抑える省エネモードであるスタンバイモードとを切り替えている。以下、第2実施形態の制御について説明する。
【0169】
(1)人体検知センサ120を用いたモードの切り替え
図18は、モード切替部136によるモードの切替動作を示すフローチャートである。
【0170】
第2実施形態では、まず、ステップS111で電源が投入される。そして、ステップS112で人体検知センサ120により投入作業を行う作業者の存在が検知されたかを判定する。検知されたと判定する場合は、ステップS113へ移行して、通常モードを行う。他方、検知されていないと判定する場合は、スタンバイモードを行う。
【0171】
なお、ここでのスタンバイモードでは、部品制御部138は、第1実施形態と同様の制御を行うが、加熱ローラ83の温度は、所定温度(例えば、110℃)となるようにヒータ84の出力を制御する。これは、例えば、一旦投入作業を行わなくなった作業者が投入作業を再開する際に、ストレッチ包装装置1の立ち上げを早くするためである。
【0172】
(2)特徴
第2実施形態では、モード切替部136は、人体検知センサ120による検知結果に基づいて、通常モードとスタンバイモードとを切り替える。具体的には、人体検知センサ120によって作業者の存在が検知されない場合には、省エネモードであるスタンバイモードを行い、人体検知センサ120によって作業者の存在が検知される場合は、通常モードを行う。
【0173】
ここでは、人体検知センサ120が、投入作業を行う作業者の存在/非存在を検知できることから、これを生かした制御を行っている。これにより、作業者が投入作業を行わない場合の消費電力を抑制できるので、省エネ及び省コストに貢献する。
【0174】
(3)変形例
上記実施形態では、スタンバイモードにおける加熱ローラ83の温度は、所定温度(例えば、110℃)となるようにヒータ84の出力を制御すると説明したが、これに限られるものではなく、所定温度は、それ以下であってもよい。例えば、作業者によるストレッチ包装装置1の使用が頻繁でない場合には、人体検知センサ120によって作業者の存在が検知されない場合にヒータ84の出力を比較的大きく落とせば、消費電力を低減でき、省エネ及び省コストに貢献する。
【産業上の利用可能性】
【0175】
本発明は、包装装置、特に、緊張保持させたフィルムに被包装物を押し付けるストレッチ機能を有するストレッチ包装装置に種々適用可能である。
【符号の説明】
【0176】
1 ストレッチ包装装置
2 投入機構(被包装物投入部)
9 制御装置
9a 入出力部(入力受付部,表示手段)
9b 制御部
11 排出台(被包装物排出部)
30 リフター機構(昇降部)
83 加熱ローラ(加熱部材)
84 ヒータ(加熱手段)
91 表示パネル
120 人体検知センサ(人体検知手段)
134 学習部
135 モードスケジュール修正部
136 モード切替部
137 バックアップ実行部
138 部品制御部(加熱手段制御部,表示手段制御部)
F フィルム(包装材)
G 商品(被包装物)
T トレー(被包装物)
【先行技術文献】
【特許文献】
【0177】
【特許文献1】特開平11−79138号公報
【技術分野】
【0001】
本発明は、ストレッチ包装装置に関する。
【背景技術】
【0002】
生鮮食料品などの被包装物を包装する装置として、ストレッチ包装装置が知られている。ストレッチ包装装置には、例えば、特許文献1(特開平11−79138号公報)に開示のように、引き伸ばされた状態のフィルムに対して被包装物を押し上げ、その状態で、フィルムを被包装物の下側に折り込んで包装するものがある。当該文献に開示のストレッチ包装装置では、被包装物が排出されていく際、電気ヒータによって加熱された搬送コンベアベルトを経由することで、被包装物の下側に折り込まれたフィルムが熱シールされる。
【0003】
ところで、近年では、省エネが謳われている。特許文献1(特開平11−79138号公報)に開示の発明でも、先の包装が行われてからの時間が所定時間を経過した場合、電気ヒータのような電気消費部品を節電モードで温度制御している。
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1(特開平11−79138号公報)では、先の包装が行われてからの時間が所定時間を経過した場合、一律に節電モードを行っている。しかし、消費電力の低減に関しては、より考慮の余地があると考える。
【0005】
そこで、本発明の課題は、より消費電力を低減できるストレッチ包装装置を提供することにある。
【課題を解決するための手段】
【0006】
本発明に係るストレッチ包装装置は、被包装物投入部と、被包装物排出部と、複数に電気消費部品と、制御部とを備える。被包装物投入部は、被包装物が投入される。被包装物排出部は、被包装物が包装された状態で排出される。複数の電気消費部品は、投入された被包装物を包装して排出する。制御部は、電気消費部品を制御する。被包装物投入部、及び/又は、被包装物排出部の近傍には、人体検知手段が配置される。人体検知手段は、被包装物の投入を行う人の存在を検知する。また、制御部は、モード切替部を有する。モード切替部は、人体検知手段による検知結果に基づいて、通常モードと第1スタンバイモードとを切り替える。第1スタンバイモードは、通常モードよりも消費電力を抑える。
【0007】
ここでは、人体検知手段による検知結果に基づいて、通常モードとスタンバイモードとを切り替えることによって、消費電力を抑制できる。よって、装置全体としての消費電力を低減できる。
【0008】
また、制御部は、学習部と、決定部とを有することが好ましい。学習部は、時間帯と人体検知手段による検知結果との関係を学習する。決定部は、第1スタンバイモードを行う第1スタンバイモード時間帯を、学習部による学習に基づいて決定する。
【0009】
ここでは、人検知手段による検知結果と時間帯との関係を学習し、消費電力を抑える第1スタンバイモードを行う時間帯を決定することによって、消費電力を低減できる。
【0010】
また、被包装物排出部の近傍に配置され、被包装物の包装材を熱シールするための加熱部材をさらに備えることが好ましい。また、電気消費部品には、加熱部材を加熱するための加熱手段が含まれることが好ましい。また、制御部は、加熱手段を制御する加熱手段制御部をさらに有することが好ましい。また、モード切替部は、通常モードよりも消費電力を抑え第1スタンバイモードよりも消費電力を抑えない第2スタンバイモードに、さらに切り替えることが好ましい。そして、加熱手段制御部は、第1スタンバイモードにおいて、加熱部材の温度が、通常モードにおける通常温度よりも低い第1温度になるように加熱手段を制御することが好ましく、第2スタンバイモードにおいて、加熱部材の温度が、第1温度よりも高く通常温度よりも低い第2温度になるように加熱手段を制御することが好ましい。
【0011】
当該包装装置においては、加熱手段の消費電力が大きいと考えられる。よって、加熱手段を制御することで、消費電力の低減に貢献できる。
【0012】
また、加熱手段制御部は、第1スタンバイモード時間帯が終了する所定時間前から、加熱部材の温度が第1温度から通常温度に近付くように加熱手段を制御することが好ましい。
【0013】
例えば、学習部による学習により第1スタンバイモード時間帯が終了した後は、作業者が被包装物の投入作業を行うと考えられる。よって、当該投入作業を行う時間帯に合わせて加熱手段を制御することで、作業者が投入作業を行うと考えられる時間には加熱部材の温度を通常温度に近い温度まで上げることができる。よって、装置の立ち上げ及び当該装置の作業者による使用を早くできる。
【0014】
また、モード切替部は、通常モードにおいて前回の被包装物が排出されてから所定時間を経過しても次回の被包装物が排出されない場合に、通常モードから第2スタンバイモードに切り替えることが好ましい。これにより、例えば、作業者が一時的に被包装物の投入を行わない時間(時間帯)の消費電力を低減できる。
【0015】
また、第1スタンバイモードにおいて人体検知手段が人の存在を検知した場合に通常モードへ移行するか否かの入力を受け付ける入力受付部、をさらに備えることが好ましい。そして、モード切替部は、入力受付部が通常モードへの移行の入力を受け付けた場合に、第1スタンバイモードを通常モードに切り替えることが好ましい。
【0016】
例えば、学習部による学習によって第1スタンバイモードを行う第1スタンバイモードが決定されていても、当該時間帯に作業者が投入作業を行うことが考えられる。この場合、作業者による通常モードへの移行の入力を入力受付部を介して受け付けることにより、作業者が作業を行うことができるようになる。他方、第1スタンバイモードにおいて、包装装置の近傍に作業者が立っており人体検知手段が当該作業者を検知したとしても、入力受付部への入力を受け付けない限りは、通常モードに切り替えない。これにより、消費電力の低減に貢献できる。
【0017】
被包装物投入部に投入された被包装物を、被包装物投入部に隣接する包装空間において上下に昇降させる昇降部をさらに備えることが好ましい。また、通常モードには、被包装物投入部又は昇降部に載せた被包装物を、手動で次の工程に移行させる移行手動制御が含まれることが好ましい。そして、モード切替部は、通常モードにおいて移行手動制御が行われており、被包装物投入部又は昇降部に被包装物が載っているときは、通常モードを第1スタンバイモードに切り替えないことが好ましい。
【0018】
ここで、例えば、移行手動制御において、被包装物投入部や昇降部に被包装物を載せたままの状態が維持されているような場合に、第1スタンバイモード(すなわち、加熱部材の温度が通常温度よりも下がっている状態)に入ると、次の工程に入る操作を行ったときに被包装物に対するフィルムの溶着が悪いものが出てくることが懸念される。そこで、このような状況のときには通常モードを第1スタンバイモードに切り替えないことで被包装物に対する溶着性を維持できる。
【0019】
また、複数の電気消費部品には、少なくとも被包装物の情報を表示する表示手段が含まれることが好ましい。そして、制御部は、表示手段への出力を制御する表示手段制御部をさらに有することが好ましい。表示手段制御部は、第1スタンバイモードにおいて非常停止状態となった場合に、表示手段への出力を停止することが好ましい。非常停止状態においては、ストレッチ包装装置が動作しないといった安全が確保できる状態にある。よって、安全が確保される状態のとき、且つ、人体検知手段によって作業者が作業を行っていない状態のときのみ、表示手段の出力を停止することで、作業者の安全を考慮しながら、省エネに貢献できる。
【0020】
また、例えば、通常モードにおいて、バックアップを行うと装置自体に負荷がかかり、作業者の作業効率に影響が出ることが懸念される。そこで、第1スタンバイモード又は第2スタンバイモードにおいて、バックアップを行うバックアップ実行部、をさらに備えることが好ましい。これにより、作業者の作業効率の低下を抑制できる。
【発明の効果】
【0021】
本発明に係るストレッチ包装装置では、より消費電力を低減できる。
【図面の簡単な説明】
【0022】
【図1】本発明の一実施形態であるストレッチ包装装置の外観斜視図。
【図2】ストレッチ包装装置の内部の正面概略図(フィルム差し込み板ユニットが第1位置を採る場合)。
【図3】図2のIII−IIIの矢視斜視図。
【図4】ストレッチ包装装置の内部の正面概略図(フィルム差し込み板ユニットが第2位置を採る場合)。
【図5】フィルム差し込み板ユニットの概略平面図。
【図6】ストレッチ包装装置の内部の平面概略図。
【図7】フィーダユニット及びフィーダ移動ユニットの相関図。
【図8】シール機構の平面図。
【図9】制御装置の制御ブロック図。
【図10】モードスケジュール作成動作を示すフローチャート。
【図11】電源が投入されてからのモードの切替動作を示すフローチャート(ステップS11〜ステップS20を示す)。
【図12】電源が投入されてからのモードの切替動作を示すフローチャート(ステップS21〜ステップS25を示す)。
【図13】ストレッチ包装装置の動作説明図。
【図14】ストレッチ包装装置の動作説明図。
【図15】ストレッチ包装装置の動作説明図。
【図16】ストレッチ包装装置の動作説明図。
【図17】ストレッチ包装装置の動作説明図。
【図18】第2実施形態に係るモードの切り替えを示すフローチャート。
【発明を実施するための形態】
【0023】
<第1実施形態>
以下、図面を参照しながら、本発明の一実施形態に係るストレッチ包装装置1について説明する。
【0024】
(1)ストレッチ包装装置1
図1は、ストレッチ包装装置1の外観斜視図である。図2は、ストレッチ包装装置1の内部の正面概略図である(フィルム差し込み板ユニット51が第1位置を採る場合)。図3は、図2のIII−IIIの矢視斜視図である。図4は、ストレッチ包装装置1の内部の正面概略図である(フィルム差し込み板ユニット51が第2位置を採る場合)図5は、フィルム差し込み板ユニット51の概略側面図である。図6は、ストレッチ包装装置1の内部の平面概略図である。図7は、フィーダユニット61,62及びフィーダ移動ユニット63,64の相関図である。図8は、シール機構8の平面図である。
【0025】
以下の説明において、前後左右、上下、正面、背面といった方向を示す言葉を用いるが、当該方向は、特にことわりのない限り、図1の右下に示す方向を意味するものとする。
【0026】
まず、ストレッチ包装装置1について簡略に説明する。ストレッチ包装装置1は、緊張保持させた包装材としてのストレッチフィルムF(図2等を参照)に対して、生鮮食品等の商品G(図3等を参照)を収容したトレーT(図3等を参照)(これらは、包装材としてのフィルムFによって包装される被包装物である)を押し上げ、フィルムFの周辺部をトレーTの下側に折り込むことによってトレーTのフィルム包装を行う装置である。ストレッチ包装装置1は、フィルム包装機能に加えて、計量機能やラベル貼り付けによる値付け機能も兼ねている。なお、商品GがトレーTに収容されない状態で包装される場合もある。
【0027】
以下、ストレッチ包装装置1の構成について、図1〜図8を用いて説明する。
【0028】
ストレッチ包装装置1は、投入機構2と、包装ステーション3と、ロール支持機構4と、フィルム送り出し機構5と、フィルム搬送機構6と、折り込み機構7と、シール機構8と、排出台11と、検知機構12(図9を参照)とを備えている。
【0029】
(1−1)投入機構2
投入機構2は、本体1aの正面中央部に設けられており、商品Gを収容したトレーTが本体1a内へ投入される投入部として機能する。投入機構2は、トレーTに収容された商品Gの重量を計量する計量器と、計量器上に載置される計量皿と、一対のローラ間に建設された複数の搬入ベルトとを有している。搬入ベルトには、搬送用の突起が設けられており、商品Gを収容したトレーTを、図3に示すように計量器上(計量皿上)に載置すれば、商品Gの重量が計量器により計量された後、トレーTが正面側から搬入ベルトに固定された突起に押されて、包装ステーション3のリフター機構30(後述する)の支持部材33上に送られる。
【0030】
なお、投入機構2では、計量皿が外れている状態では、所定の重量を満たないとして、ストレッチ包装装置1(すなわち、本体1a内の各機構)が動作しないように後述する制御装置9によって制御されている。しかし、作業者が計量器上に手を乗せる等を行って計量器上に所定の荷重がかかる場合、ストレッチ包装装置1が稼動してしまうことが懸念される。そこで、ここでは、後述するカメラ121が計量皿の検知を行い、計量皿が検知されない場合は、制御装置9は、計量器上に所定の荷重がかかったとしてもストレッチ包装装置1の動作を行わないようにしている。これにより、計量皿が外れているにも関わらず所定の計量器に所定の荷重がかかる場合のストレッチ包装装置1の稼動を防止している。
【0031】
(1−2)包装ステーション3
包装ステーション3は、本体1a内に形成される包装空間であって、投入機構2に隣接している。包装ステーション3では、計量が終わった商品Gを含んだトレーTに一連のフィルム包装を行う包装処理が行われる。この包装ステーション3では、フィルム搬送機構6によってストレッチフィルムFが張られ、張られたストレッチフィルムFに対して、リフター機構30が商品Gが収容されたトレーTを押し付ける(図15を参照)。そして、折り込み機構7がストレッチフィルムFを押し付けた状態のトレーTの下側へとストレッチフィルムFの周囲の部分を折り込むことによって、トレーT及び商品GがストレッチフィルムFで覆われた状態となる。
【0032】
この包装ステーション3の下部には、リフター機構30が設けられている。リフター機構30は、トレーTの底面を保持してトレーT及び商品Gを上下に昇降する昇降部として機能する。
【0033】
リフター機構30は、図3に示すように、支持ベース31と、支持ベース31上に固定された複数の支持バー32と、各支持バー32の上端部にそれぞれ回動自在に支持されトレーTの底面を受ける支持部材33とを有している。また、リフター機構30の下部には、支持ベース31を上下移動させる電動ボールネジ機構34が配置される。
【0034】
なお、各支持バー32は、その中央部分に前後左右に折れ曲がるヒンジを備えており、当該ヒンジは、左右折り込み板76,77(後述する、図2や図3を参照)や後折り込み板78(後述する)がトレーTの下部に入ってくるときに一時的に転倒するように構成されている。
【0035】
また、包装ステーション3の上部には、押さえ機構81が配置されている。押さえ機構81は、電動ボールネジ機構34によって、リフター機構30に載っている商品G及びトレーTが突き上げられてとまったときにトレーTや商品Gが姿勢を崩して転倒することを抑える。
【0036】
(1−3)ロール支持機構4
ロール支持機構4は、フィルムロールRを支持する機構であり、図2に示すように、本体1aの側部(具体的には、左側部)に配置されている。フィルムロール機構4は、主として、2つのロールバー(図示せず)から構成されている。ロールバーは、フィルムロールRを挿通させ、ホルダー等でフィルムロールRを保持する。ロールバーは、本体1aに回転自在となるように支持されている。ロールバーの一端には、プーリ4bが固定されており、プーリ4bには、ベルト4cが掛けられている。2つのロールバーは、互いに上下左右方向にずれるように配置されている。
【0037】
ベルト4cは、1つのフィルムロール駆動モータ4dによって駆動される。フィルムロール駆動モータ4は、正逆回転が可能であり、正回転時に一方のロールバーに挿通されるフィルムロールRが回転されるように、他方、逆回転時に、他方のロールバーに挿通されるフィルムロールRが回転されるように駆動する。ベルト4cとフィルムロール駆動モータ4dとの間には、ワンウェイクラッチ4eが設けられている。
【0038】
(1−4)フィルム送り出し機構5
フィルム送り出し機構5は、フィルムロールRから引き出されたフィルムFを、搬送機構6(具体的には、後述する一対のフィーダユニット61,62)に送り出す(受け渡す)ための機構である。フィルム送り出し機構5は、図2や図5に示すように、主として、フィルム差し込み板ユニット51と、フィルム差し込み板ユニット51を、所定軸を支点として回動させるフィルム差し込み板駆動モータ(図示せず)とから構成されている。
【0039】
フィルム差し込み板ユニット51は、主として2枚の板部材57a,58aから構成される第1フィルム差し込み板51aと、主として2枚の板部材57b,58bから構成される第2フィルム差し込み板51bとを有する。
【0040】
フィルム差し込み板ユニット51は、フィルムロールRの上方に配置されており、フィルムロールRの長手方向に沿って延びている。なお、フィルム差し込み板ユニット51の長手方向の長さは、フィルムロールRの長手方向の長さよりも長い。
【0041】
2枚の板部材57a,58a、57b,58bには、それぞれ、切り欠き53a〜53iが形成されている(なお、図5では、板部材57a,58aのみを図示しているが、板部材57b,58bについても同様の構成である)。切り欠き53aと、切り欠き53b〜53iとの距離は、それぞれ、異なるフィルム幅の数種類のフィルムFに対応した距離となっている。例えば、切り欠き53aの外側と切り欠き53iの外側との距離は、最もフィルム幅が大きいフィルムFのフィルム幅に概ね一致している。
【0042】
2枚の板部材57a,58a、57b,58bは、それぞれ、一端が図示しないヒンジで連結されており、開閉が可能である。これにより、作業者は、フィルムFを、板部材57aと板部材58aとの間、板部材57bと板部材58bとの間に簡易に差し込むことができる。板部材57aと板部材58aとは、図5に示すように、略同形状である。板部材57bと板部材58bとも同様に、略同形状である。
【0043】
フィルム差し込み板駆動モータは、フィルム差し込み板ユニット51を、ヒンジ部分を軸として所定の範囲内で回動させる。フィルム差し込み板駆動モータによって、フィルム差し込み板ユニット51は、例えば、第1位置(図2の一点鎖線で示す位置)と、第1位置よりも下方に位置する第2位置(図4の二点鎖線で示す位置)とを採ることができる。具体的には、第1位置は、第2フィルム差し込み板51bがその長手方向が略水平方向に延びるような位置(後述するベルトユニット220と略平行になる位置)である。第2位置は、第1フィルム差し込み板51aが、その長手方向が略水平方向に延びるような位置(ベルトユニット220と略平行となる位置)である。
【0044】
なお、フィルム差し込み板ユニット51は、ストレッチ包装装置1が稼動している間は、第1位置及び第2位置のいずれかに位置する。フィルム差し込み板ユニット51の位置の選択は、2つ配置されるフィルムロールRのいずれを使用するかによって決定し、後述する制御装置9を介して作業者等が行う。より具体的には、フィルム差し込み板ユニット51は、上方に位置するフィルムロールRが選択される場合は、第1位置を採り、下方に位置するフィルムロールRが選択される場合は、第2位置を採る。
【0045】
また、フィルム差し込み板駆動モータは、フィルム差し込み板ユニット51を、フィルム搬送機構6側に水平に移動させる。これにより、フィルム搬送機構5は、フィルム搬送機構6にロール支持機構4で保持するフィルムFを受け渡すことができる。
【0046】
(1−5)フィルム搬送機構6
フィルム搬送機構6は、フィルム送り出し機構5から送られるフィルムFを受け取り、当該フィルムFを包装ステーション3の中央部分へと搬送する。フィルム搬送機構6は、フィルムFを包装ステーションへと搬送した後、後述する引き伸ばし動作を行うことでフィルムFを緊張保持する。フィルムFを緊張保持する。
【0047】
フィルム搬送機構6は、主として、第1フィーダユニット61と、第2フィーダユニット62と、第1フィーダ移動ユニット63と、第2フィーダ移動ユニット64と、フィーダ駆動ユニット65とを有する。
【0048】
図6に示すように、第1フィーダユニット61は、本体1aの正面側部分に配置されている。第2フィーダユニット62は、本体1aの背面側部分に配置されている。
【0049】
第1フィーダユニット61及び第2フィーダユニット62は、フィルム差し込み板ユニット51によって保持されるフィルムFの幅方向の両側部(すなわち、正面側部分及び背面側部分)を上下のベルトで挟み、フィーダ駆動ユニット65によってフィルムFを矢印A1(図2を参照)に示す方向へと搬送する。
【0050】
また、第1フィーダユニット61は、第1移動フィーダユニット63の作動により、第2フィーダユニット62は、第2移動フィーダユニット64の作動により、それぞれフィルムFの幅方向に移動するように構成されている。それぞれのフィーダユニット61,62は、フィルムFの幅方向に沿って伸びるスライドシャフト66,67によって、2箇所でフィルムFの幅方向に移動自在にされている。
【0051】
なお、図示していないが、第1及び第2フィーダユニット61,62は、複数のクランプを有している。これらのクランプは、ソレノイドによって作動し、フィルムFの把持及び把持の解除を行う。
【0052】
なお、フィルム搬送機構6のフィルム搬送方向の上流側には、図2や図4に示すように、カッター機構69が設けられている。カッター機構69は、フィルム送り出し機構5からフィルム搬送機構6へと受け渡されたフィルムFがフィルム搬送機構6で所定量搬送された後に、両機構5、6間においてフィルムFを切断するために設けられている。カッター機構69は、フィルムの幅よりも長い切断刃を有しており、当該切断刃をアクチュエータで移動させることによりフィルムFを切断する。
【0053】
(1−6)折り込み機構7
折り込み機構7は、包装ステーション3に搬送されたフィルムFによって、被包装物を包装する機構である。折り込み機構7は、図2や図3に示すように、左右折り込み板76,77と、後折り込み板78と、前折り込み棒79とを有する。
【0054】
左右折り込み板76,77は、フィルムFのフィルムの搬送方向の両端部をトレーTの底面側に折り込む。
【0055】
後折り込み板78は、フィルムFの第2フィーダユニット62側の側部をトレーTの底面側に折り込む。
【0056】
左右折り込み板76,77及び後折り込み板78は、図示しない折り込み板駆動モータ及びタイミングベルトによって水平移動が可能である。
【0057】
前折り込み棒79は、トレーTの排出時に、フィルムFの第1フィーダユニット61側の側部がトレーTの底面側に折り込まれるように配置されている。トレーTの排出は、排出プッシャー75がトレーTをシール機構8(前面側)に向けて押し出すことによって行われる。
【0058】
(1−7)シール機構8
シール機構8は、排出プッシャー75によって押し出されたトレーTの底面を熱してシールする。なお、このとき、上述の押さえ機構81は、商品Gが収容されたトレーTをシール機構8の上面に押し付ける役割も有している。
【0059】
シール機構8は、図8に示すように、主として、搬送ローラ82と、加熱ローラ83と、ヒータ84と、ローラ支持部材85と、ヒータ支持部材86とを有する。
【0060】
搬送ローラ82は、2本の加熱ローラ83の前後に複数本が配置されている。搬送ローラ82は、左右一対のローラ支持部材85は、各ローラ82、83の両端を回転自在に支持している。また、加熱ローラ83は、筒状に形成されており、その内部に円柱状の電気式のヒータ84が挿入されている。ヒータ84は、いわゆるカートリッジヒータであり、加熱ローラ83と接触しておらず、両端がヒータ支持部材85に固定されている。これらのヒータ84の一端には、電極88が設けられている。後述する制御装置9によって当該電極に通電を行うことで、ヒータ84内の発熱コイルが発熱する。すなわち、加熱ローラ83は、ヒータ84によって加熱されている。加熱ローラ83がヒータ84によって加熱されることにより、加熱ローラ83を介して排出台11に排出される商品G及びトレーTの包装材であるフィルムFが、トレーTの下側で熱シールされる。すなわち、加熱ローラ83は、フィルムFを熱シールするための加熱部材としての役割を有する。
【0061】
(1−8)排出台11
シール機構8の正面側には、商品Gが収容されたトレーTが完全に包装された状態で排出される排出台11が設けられている。包装が完了されたトレーTには、ラベル発行機16が、ラベルプリンター15で印字処理されたラベルを貼り付ける。なお、ラベルには、商品Gの名称、重量、価格、加工日、消費期限等が印字される。
【0062】
(1−9)検知機構12
検知機構12は、主として、商品G及びトレーTを投入機構2の計量器上に載置する(すなわち、投入機構2への商品G及びトレーTの投入を行う)作業者の存在を検知する人体検知手段としての人体検知センサ120(図3や図9を参照)と、計量器上に載置されたトレーTのサイズ等を検知する撮像手段としてのカメラ121(図3や図9を参照)と、加熱ローラ83に接触し加熱ローラ83の外表面の温度を検知する温度検知手段としての温度センサ122(図8や図9を参照)とを有する。なお、検知機構12によって検知された各種のデータは、制御装置9に送信される。
【0063】
人体検知センサ120及びカメラ121は、排出台11の底面に設置されており、投入機構2の上方に配置されている。すなわち、人体検知センサ120及びカメラ121は、投入機構2及び排出台11の近傍に配置されている。
【0064】
人体検知センサ120は、具体的には、投光部(図示せず)と受光部(図示せず)とを有する。そして、人体検知センサ120は、受光部による受光が遮断されたときに、人体を検知している。なお、人体検知センサ120は、所定時間(例えば、3秒)の間、受光部による受光が遮断された場合に、人体を検知する。カメラ121は、人体検知センサ120の近傍に設置される。なお、検知機構12によって検知された各種の検知データは、後述する制御部9bに送信される。
【0065】
(2)制御装置9
図9は、制御装置9の制御ブロック図である。
【0066】
制御装置9は、図1に示すように、本体1aの上方部分に配置される。制御装置9は、コンピュータから構成され、検知機構12や各種のスイッチ(主電源スイッチ17や、非常停止スイッチ18(図1を参照))による検知信号等を受けて、本体1aに配置される各機構の動作を制御する制御手段として機能する。なお、各機構とは、各種のモータ(具体的には、フィルム差し込み板駆動モータ、フィルムロール駆動モータ4d、折り込み板駆動モータ等)を冷却する冷却ファン(図示せず)、ヒータ84、後述する表示パネル91等を含む、電気を消費する電気消費部品をいう。
【0067】
制御装置9は、具体的には、図9に示すように、主として、入出力部9aと、制御部9bと、記憶部9cとを有する。
【0068】
(2−1)入出力部9a
入出力部9aは、主として、表示パネル91と、操作キー92とから構成される。表示パネル91は、商品Gの名称、商品Gの重量、商品Gの価格、ヒータ84の温度等の情報を表示する表示手段であり、バックライトを有している。バックライトは、発光素子(例えば、LED素子)と反射板と導光板とを有する。表示パネル91は、タッチパネル式であり、作業者の入力を受け付ける操作ボタンも配される。すなわち、表示パネル91は、キーボードから構成される操作キー92とともに、作業者の入力を受け付ける入力受付部としても機能する。
【0069】
(2−2)制御部9b
制御部9bは、CPU等から構成され、主として、計測部131と、データ受付部132と、モードスケジュール作成部133と、学習部134と、モードスケジュール修正部135と、モード切替部136と、バックアップ実行部137と、部品制御部138として機能する。
【0070】
(2−2−1)計測部131
計測部131は、時刻、日、月、年、曜日などの時間的要素を計測する。すなわち、計測部131は、時計やカレンダーとして機能する。
【0071】
(2−2−2)データ受付部132
データ受付部132は、検知機構12によって検知された各種の検知データ、入出力部9aを介して行われる作業者による入力データ、外部装置から転送される転送データ等を受け付ける。そして、受け付けた各種のデータを、後述する受付データベース141に格納する。
【0072】
(2−2−3)モードスケジュール受付部133
モードスケジュール受付部133は、制御装置9の入出力部9aを介して作業者によって入力される入力データのうち、モードスケジュールのデータを受け付ける。すなわち、まず、作業者によって、入出力部9aを介したモードスケジュールの初期設定が行われる。ここで、モードスケジュールとは、各種のモードを行う時間帯や当該時間帯の開始時刻を決定したスケジュールである。
【0073】
ここで、モードには、通常モードと、第1スタンバイモードと、第2スタンバイモードとが存在する。第1スタンバイモード及び第2スタンバイモードは、消費電力を通常モードにおける通常消費電力よりも抑える省電力モードである。具体的には、第2スタンバイモードは、通常モードにおいて前回の商品G及びトレーTが排出台11に排出されてから所定時間(作業者によって入出力部9aを介して入力され、記憶部9cに記憶される任意の値)を経過しても次回の商品G及びトレーTが排出されない場合に、通常モードから自動的に切り替えられる省電力モードである。第1スタンバイモードとは、第2スタンバイモードよりも消費電力を抑える省電力モードをいう。第1スタンバイモード及び第2スタンバイモードにおける制御については後述する。なお、ここでの通常モードとは、第1スタンバイモードや第2スタンバイモードのような省電力を目的としたモードではない通常のモードのことをいう。
【0074】
なお、第2スタンバイモードは自動的に切り替えられるモードであるため、モードスケジュールの初期設定では、通常モードを行う通常モード時間帯や通常モード時間帯を開始する通常モード開始時刻と、第1スタンバイモードを行う第1スタンバイモード時間帯や第1スタンバイモード時間帯を開始する第1スタンバイモード開始時刻第1スタンバイモード開始時刻と(すなわち、通常モード及び第1スタンバイモードのモードスケジュール)が設定される。モードスケジュール受付部133によって受け付けられたモードスケジュールは、後述するモードスケジュールデータベース142に格納される。
【0075】
(2−2−4)学習部134
学習部134は、時間や時間帯と、人体検知センサ120による検知結果との関係を学習する。具体的には、計測部131によって計測される時間的要素のデータ(ひいては、これに基づいて算出する時間帯のデータ)と、受付データベース141に格納された人体検知センサ120による検知データとを読み込むことによって、時間や時間帯と、作業者による商品G及びトレーTの投入機構2への投入/非投入との関係を学習する。すなわち、人体検知センサ120は、商品G及びトレーTの投入機構2への投入を行うために投入機構2の近傍に位置する作業者を検知するので、学習部134は、人体検知センサ120による検知データと時間的要素のデータとを関連付けることで、作業者が商品G及びトレーTを投入機構2へ投入する/投入しない時間や時間帯を学習できる。
【0076】
具体的には、例えば、学習部134は、所定時間(例えば、1日)毎に、ほぼ、時刻9:00〜12:00、13:00〜16:00の間は、作業者は商品G及びトレーTの投入を行い、時刻12:00〜13:00の間は、作業者は商品G及びトレーTの投入を行っていないことを学習する。なお、ここでは、時間的要素のデータと人体検知センサ120による検知データとが学習部134によって関連付けられたデータを関連データという。当該関連データは、後述する関連データベース143に格納される。
【0077】
(2−2−5)モードスケジュール修正部135
モードスケジュール修正部135は、学習部134による学習に基づいて(具体的には、関連データベース144に記憶される関連データを読み込むことによって)、所定時間(例えば、1日)毎に、モードスケジュールデータベース142に記憶されるモードスケジュールを修正する。そして、当該修正したモードスケジュールを最新のモードスケジュールとして、モードスケジュールデータベース142に格納する。すなわち、モードスケジュール修正部135は、最新のモードスケジュールを作成する機能を有する。よって、モードスケジュール修正部135は、学習部134による学習が増えれば増える程(関連データが関連データベース143に蓄積されればされる程)、より作業者の投入作業に合わせたモードスケジュールに修正できる。
【0078】
具体的には、モードスケジュール修正部135は、通常モード時間帯や通常モード開始時刻と第1スタンバイモード時間帯や第1スタンバイモード開始時刻とを修正する。例えば、学習部134によって上述の例のようなスケジュールが学習されたとすると、モードスケジュール修正部135は、電源が投入されるとすぐに第1スタンバイモードとし、9:00〜12:00、13:00〜16:00を通常モード時間帯(9:00、13:00を通常モード開始時刻)とし、12:00〜13:00、16:00〜電源が落とされるまでを第1スタンバイモード時間帯(12:00、16:00を第1スタンバイモード開始時刻)とする、といったモードスケジュールを作成する。
【0079】
(2−2−6)モード切替部136
モード切替部136は、通常モードと、第1スタンバイモードと、第2スタンバイモードとを切り替える。モード切替部136によるモードの切替動作については、後述する。
【0080】
(2−2−7)バックアップ実行部137
バックアップ実行部137は、第1スタンバイモード及び第2スタンバイモードにおいて、バックアップを実行する。
【0081】
バックアップの実行は、ストレッチ包装装置1にとって少なくとも負荷がかかる作業である。よって、バックアップ実行部137は、作業者が投入作業を行っていない第1スタンバイモード及び第2スタンバイモード中に当該バックアップ作業を行っている。
【0082】
バックアップを行うデータの具体例としては、以下に示すようなものが挙げられる。
【0083】
まず、ラベルプリンター15の走行距離、包装回数(商品G及びトレーTが投入されてから包装が完了されるまでを1回とする)、エラーログ等のデータである。これらのデータをバックアップすることにより、メンテナンスを行うタイミングを決定できる。
【0084】
次に、ラベルに印字した各種のデータ(上述した商品Gの名称・重量・価格や加工日等)である。当該データをバックアップすることにより、ラベルに印字された日付等がいつから実際の値とずれているか等を知ることができる。
【0085】
また、ラベルに印字した各種のデータに基づいて、制御部9bが商品Gの価格を合計することにより、生産実績を算出できる。そして、当該生産実績から廃棄実績(廃棄された商品Gの合計金額)を控除することにより、概ねの売上実績を算出できる。これにより、各店舗等の売上分析にも貢献できる。
【0086】
次に、ストレッチ包装装置1のセットアップのための基本的なデータであるマスターデータ(商品マスタ、トレーマスタ等)である。商品マスタ及びトレーマスタは、リンクされており、ある商品Gに対応するトレーTを呼び出すことができる。マスターデータは、随時更新ができるようになっている。マスターデータをバックアップすることにより、万が一、ストレッチ包装装置1が故障したような場合、前回バックアップしたマスターデータに設定できる。すなわち、直近の設定データに復帰できる。
【0087】
(2−2−8)部品制御部138
部品制御部138は、複数の電気消費部品を制御する。
【0088】
(2−3)記憶部9c
記憶部9cは、RAMやROM等から構成される。記憶部9cは、主として、受付データベース141と、モードスケジュールデータベース142と、関連データベース143とを有する。
【0089】
(2−3−1)受付データベース141
受付データベース141には、検知機構12や他の各種のセンサによる検知データ、入出力部9aを介して作業者により入力された入力データ、外部装置から転送された転送データ等が記憶されている。
【0090】
(2−3−2)モードスケジュールデータベース142
モードスケジュールデータベース142には、上記のモードスケジュールが記憶されている。なお、モードスケジュールデータベース142には、常に最新のモードスケジュールが記憶されているとする。
【0091】
(2−3−3)関連データベース143
関連データベース143には、上記の関連データが記憶されている。
【0092】
(2−4)制御装置9におけるモードスケジュールの作成動作
図10は、制御装置9におけるモードスケジュール作成動作を示すフローチャートである。以下、図10を用いて、モードスケジュールの作成動作について説明する。
【0093】
まず、ステップS1では、モードスケジュール受付部133が、上述のように、モードスケジュールを受け付ける。そして、モードスケジュール受付部133は、当該受け付けたモードスケジュールを、モードスケジュールデータベース142に格納する。
【0094】
ステップS2では、学習部134が、上述の学習を行う。
【0095】
ステップS3では、モードスケジュール修正部135が、学習部134による学習に基づいて、モードスケジュールデータベース142に記憶されているモードスケジュールを修正する。そして、当該修正したモードスケジュールを、最新のモードスケジュールとして、モードスケジュールデータベース142に格納する。
【0096】
以上により、最新のモードスケジュール、すなわち、通常モード時間帯や通常モード開始時刻及び第1スタンバイモード時間帯や第1スタンバイモード開始時刻が決定される。
【0097】
(2−5)モード切替部136による切替動作
図11及び図12は、電源が投入されてからのストレッチ包装装置1の動作を示すフローチャートである。以下、図11及び図12を用いて、ストレッチ包装装置1の動作を説明する。
【0098】
まず、ステップS11では、ストレッチ包装装置1の電源が投入される。すなわち、主電源スイッチ17が押される。
【0099】
ステップS12では、モード切替部136が、通常モード時間帯を開始する通常モード開始時刻から計測部131によって計測される現在の時刻を引いた値t1が所定時間ta(作業者によって制御装置9の入出力部9aを介して入力される任意の値)以下(t1≦ta)であるか否かを判定する。
【0100】
具体的には、例えば、モードスケジュールにおいて通常モード時間帯が9:00〜12:00とされている場合であって、現在時刻が8:45である場合、モード切替部136は、9:00から8:45を引いた15分が所定時間ta以下であるか否かを判定する。t1≦taであると判定する場合には、ステップS13へ移行し、他方、t1≦taでないと判定する場合は、ステップS14を実行する。
【0101】
ここでは、通常モード開始時刻まで所定時間以内か否か、或いは、通常モード開始時刻を過ぎているか否かを判定している。
【0102】
ステップS13では、部品制御部138が、加熱ローラ83の温度が通常モードにおける通常温度(例えば、130℃)に近付くように、ヒータ84の出力を制御する(具体的には、ヒータ84の出力を上げる)。具体的には、加熱ローラ83の温度が所定温度(例えば、110℃)になるように、ヒータ84の出力を上げる。すなわち、ここでは、通常モード開始時刻の所定時間ta前からヒータ84の出力を上げることによって、作業者が投入作業を行うと考えられる時間には加熱ローラ83の温度を通常温度に近い温度まであげることができる。よって、ストレッチ装置1の使用を早く開始できる。
【0103】
ここで、所定時間taとは、ヒータ84の出力を制御することによって、通常モード開始時刻において、加熱ローラ83の温度が通常温度に近付く温度にできる時間である。
【0104】
ステップS14では、モード切替部136が、モードスケジュールに沿ってモードを実行する。すなわち、通常モード時間帯までは第1スタンバイモード時間帯となるので、モード切替部136は、第1スタンバイモードを実行する。ここでは、通常モード開始時刻までまだ時間があると考えられるので、消費電力を抑制できる第1スタンバイモードを行う。よって、省エネに貢献できる。
【0105】
第1スタンバイモードでは、部品制御部138は、冷却ファンを駆動するためのモータ及び表示パネル91のバックライトへの出力を停止し、加熱ローラ83の温度が第1温度(例えば、10℃)となるようにヒータ84の出力を制御する。すなわち、部品制御部138は、冷却ファンを駆動する駆動手段を制御する駆動手段制御部や表示パネル91への出力を制御する表示手段制御部として機能する。
【0106】
ステップS15では、モード切替部136が、人体検知センサ120によって作業者が検知されたか否かを判定する。検知されたと判定する場合は、ステップS16へ移行し、他方、検知されていないと判定する場合は、作業者が検知されるまで待機する。
【0107】
ステップS16では、部品制御部138がバックライトへの出力を上げると共に、モード切替部136が、表示パネル91に配されるスタートボタンが押されたか否かを判定する。なお、スタートボタンは、通常モードを開始する、又は、現在の実行中のモードを解除して通常モードに切り替えるためのボタンであり、表示パネル91又は操作キー92上に配される。
【0108】
なお、作業者によって表示パネル91のスタートボタンが押されると、データ受付部132が当該入力データを受け付ける。そして、モード切替部136は、当該入力データを受けることによって、スタートボタンが押されたと判定し、通常モードを実行する(ステップS17)。すなわち、部品制御部138は、冷却ファンを駆動するためのモータへの出力を開始し、加熱ローラ83の温度が通常温度となるようにヒータ84の出力を制御する。なお、第2スタンバイモードから通常モードへ切り替えるときは、当該切替と同時に、部品制御部138が、表示パネル91のバックライトへの出力も開始する。
【0109】
他方、スタートボタンが押されていないと判定する場合は、スタートボタンが押されるまで待機する。
【0110】
ステップS18では、モード切替部136が、通常モード時間帯を開始する通常モード開始時刻から現在の時刻を引いた値t1が所定時間ta(作業者によって制御装置9の入出力部9aを介して入力される任意の値)以下(t1≦ta)であるか否かを判定する。
【0111】
t1≦taであると判定する場合は、ステップS13へ移行する。t1≦taでないと判定する場合は、ステップS19へ移行する。
【0112】
ステップS19では、モード切替部136が、作業者が検知されたか否かを判定する。検知されたと判定する場合は、ステップS20へ移行し、ステップS13と同様に、ヒータ84の出力を上げる。そして、ステップS16へ移行する。他方、検知されていないと判定する場合は、ステップS12へ移行する。
【0113】
ステップS17で通常モードを実行すると、ステップS21へ移行する。
【0114】
ステップS21では、モード切替部136が、現在時刻が第1スタンバイモード開始時刻になったか否かを判定する。なったと判定する場合は、ステップS14へ移行して第1スタンバイモードを実行する。作業者が検知され且つスタートボタンが押されなければ、通常モード開始時刻の所定時間ta前になるまでは、第1スタンバイモードが行われる。
【0115】
他方、第1スタンバイモード開始時刻になっていないと判定する場合は、ステップS22へ移行する。
【0116】
ステップS22では、モード切替部136が、前回の商品G及びトレーTが排出台11に排出されてからの経過時間t2が、所定時間tb(作業者によって入出力部9aを介して入力され、記憶部9cに記憶される任意の値)以上(t2≧tb)であるか否かを判定する。t2≧tbであると判定する場合は、ステップS23へ移行し、第2スタンバイモードを実行する。他方、t2≧tbでないと判定する場合は、通常モードを維持する。
【0117】
ここで、第2スタンバイモードにおいては、部品制御部138は、冷却ファンを駆動するためのモータ及び表示パネル91のバックライトへの出力を停止し、加熱ローラ83の温度が第2温度(例えば、110℃)となるようにヒータ84の出力を制御する。
【0118】
ステップS24では、モード切替部136が、作業者が検知されたか否かを判定する。検知されたと判定する場合は、ステップS17へ移行して通常モードを実行する。他方、検知されていないと判定する場合は、ステップS25へ移行する。
【0119】
ステップS25では、モード切替部136が、現在時刻が第1スタンバイモード開始時刻になったか否かを判定する。なったと判定する場合は、ステップS14へ移行して第1スタンバイモードを実行する。なっていないと判定する場合は、ステップS23へ移行して第2スタンバイモードを維持する。
【0120】
なお、以上に説明した一連の動作は、電源が落とされるまで行われる。
【0121】
(3)ストレッチ包装装置1の全体の概略動作
図13〜図17は、ストレッチ包装装置1の動作を説明するための説明図である。
【0122】
以下、上記のような構成を有するストレッチ包装装置1の動作について図13〜図17を用いて説明する。なお、以下の駆動動作は、制御装置9によって行われるものとする。
【0123】
まず、図13に示すように作業者が商品Gを収容したトレーTを投入機構2の計量器上に載せると、計量値が安定して計量が完了するのを待って、搬入ベルトが動き出す。この搬入ベルトの動きにしたがって搬入ベルトに固定されている突起が前面側から背面側へと移動する。これにより、計量器上に載せられた商品Gは、リフター機構30の支持部材33上に押し出される(図14を参照)。
【0124】
一方、フィルムロールRからフィルム送り出し機構5によりフィルム搬送機構6へと受け渡されたフィルムFは、第1フィーダユニット61及び第2フィーダユニット62によってリフター機構30の上方まで運ばれる。そして、リフター機構30の上方において、各クランプの作動によりフィルムFの幅方向の両側部が把持された状態となっている。
【0125】
そして、各クランプにより把持されたフィルムFに対して、ボールネジ機構34が商品Gを収容したトレーTを載せたリフター機構30を押し上げる(図15を参照)。これにより、各クランプにより保持されたフィルムFは、商品G及びトレーTの上部を覆うように伸張する。
【0126】
この状態において、後折り込み板78及び左右折り込み板76,77がトレーTの下側に水平移動すると、適当なタイミングで各クランプがフィルムFの保持を解除して、フィルムFの周囲3辺がトレーTの下側に折り込まれる(図16を参照)。そして、排出プッシャー79aがトレーTをシール機構8側に押し出すと、折り込まれていなかった正面側のフィルムFの1辺が前折り込み棒79に当たり、シール機構8側へのトレーTの移動に従ってトレーTの下側に折り込まれていく。なお、正面側のクランプは、このときにフィルムFの保持が解除される。また、この移動中に、トレーTの下側に折り込まれたフィルムFが加熱ローラ83によって熱シールされ、図17に示す位置に排出されたとき(排出台11に排出されたとき)には、商品G及びトレーT全体をフィルムFが覆った包装完了の状態となる。
【0127】
さらに、計量値に基づいて算出される商品の値段や重量等がラベルプリンター15によりラベルに印字される。そして、当該ラベルが、ラベル発行機16により包装が完了されたトレーTに貼り付けされる。
【0128】
(4)特徴
(4−1)
本実施形態のストレッチ包装装置1では、包装材であるフィルムFによって包装される商品G及びトレーTのような被包装材が投入される投入機構2、及び、投入された商品G及びトレーTをフィルムFによって包装して排出するための排出台11の近傍に、人体検知センサ120が配置されている。人体検知センサ120は、投入機構2へ商品G及びトレーTを投入する作業者の存在を検知する。
【0129】
そして、本実施形態のストレッチ包装装置1では、通常モードと、通常モードよりも大きく消費電力を抑える省電力モードである第1スタンバイモードとが存在する。
【0130】
本実施形態では、学習部134が、時間と人体検知センサ120による検知結果との関係を学習する。そして、モードスケジュール修正部135が、学習部134による学習に基づいて、モードスケジュール、すなわち、第1スタンバイモードを行う第1スタンバイモード時間帯や第1スタンバイモード開始時刻を決定する。
【0131】
そして、当該モードスケジュールに基づいて、モード切替部136が当該複数のモードを切り替える。
【0132】
ここでは、学習部134が時間と人体検知センサ120による検知結果との関係を学習することによって、モードスケジュール修正部135は、作業者の投入作業に合わせて通常モードと省電力モードとを切り替えることができるモードスケジュールを決定できる。
【0133】
よって、作業者が投入作業を行わないと考えられる時間帯において、通常モードにおける通常電力と比べて大きく消費電力を抑制できる第1スタンバイモードを行うことができる。よって、消費電力を低減でき、省エネ及び省コストに貢献する。
【0134】
(4−2)
本実施形態では、排出台11の近傍に、商品G及びトレーTを包装するフィルムFを熱シールするための加熱ローラ83が配置されている。そして、加熱ローラ83は当該加熱ローラ83を加熱するための加熱手段であるヒータ84によって加熱される。
【0135】
そして、部品制御部138は、第1スタンバイモードでは、加熱ローラ83の温度が通常温度(例えば、130℃)よりも低い第1温度(例えば、10℃)になるように、第2スタンバイモードでは、加熱ローラ83の温度が第1温度よりも高く通常温度よりも低い第2温度(例えば、110℃)になるように、ヒータ84を制御する。
【0136】
ストレッチ包装装置では、ヒータの消費電力は、全消費電力の8−9割程度を占めるといわれている。よって、作業者が作業を行わない第1スタンバイモードにおいてヒータ84の出力を通常モードよりも大きく抑えることで、消費電力を低減できる。
【0137】
(4−3)
本実施形態では、部品制御部138は、第1スタンバイモード時間帯が終了する所定時間前から、加熱ローラ83の温度が第1温度から通常温度に近付くように制御する。
【0138】
ここでは、モードスケジュールによれば、第1スタンバイモード時間帯が終了した後は、通常モードが開始される。よって、作業者が投入作業を行うと考えられる時間帯に合わせてヒータ84を制御することで、作業者が投入作業を行うと考えられる時間には加熱ローラ83の温度を通常温度に近い温度まで上げることができる。例えば、12:00〜13:00までは、お昼休みに入るといったような作業者のスケジュールがある場合、お昼休みを終えて戻ってきた作業者が作業を行うまでのストレッチ包装装置1の立ち上げを早くできる。よって、ストレッチ包装装置1の使用を早くできる。
【0139】
また、本実施形態では、通常モード時間帯の所定時間前から加熱ローラ83の温度が第1温度から通常温度に近付くように制御する。これによっても上述と同様の効果を奏する。
【0140】
(4−4)
作業者の諸事情により、一時的に投入作業を行わない時間があると考えられる。
【0141】
そこで、本実施形態では、モード切替部136は、通常モードにおいて前回の商品G及びトレーTが排出されてから所定時間tbを経過しても次回の商品G及びトレーTが排出されない場合に、通常モードから第1スタンバイモードに切り替える。
【0142】
これにより、作業者が投入作業を一時的に行わない間の消費電力も低減できる。
【0143】
(4−5)
本実施形態では、入出力部9aは、第1スタンバイモードにおいて人体検知センサ120が作業者の存在を検知した場合に、通常モードへ移行するか否かの入力を受け付ける。そして、入出力部9aが当該入力を受け付けた場合、モード切替部136が、第1スタンバイモードを通常モードに切り替える。
【0144】
ここでは、例えば、モードスケジュール(第1スタンバイモード時間帯や第1スタンバイモード開始時刻)が決定されていても、当該時間帯に作業者が投入作業を行うことが考えられる。この場合であっても、通常モードへの移行の入力を受け付けることにより、投入作業を開始できる。他方、第1スタンバイモードにおいて、ストレッチ包装装置1の近傍に作業者が立っており、人体検知センサ120が当該作業者を検知したとしても、入出力部9aを介した入力を受け付けない限りは、通常モードには切り替えない。これにより、消費電力の低減に貢献できる。
【0145】
(4−6)
バックアップの実行は、ストレッチ包装装置にとって少なくとも負荷がかかる作業である。このため、作業者の作業効率に影響が出ることが懸念される。
【0146】
そこで、本実施形態では、バックアップ実行部137は、作業者が投入作業を行っていない第1スタンバイモード及び第2スタンバイモードにおいて、バックアップを実行する。これにより、作業者の作業効率を維持できる。
【0147】
(4−7)
本実施形態では、電源が投入されてから電源が落とされるまで、モード切替部136によって各種のモードが切り替えられる。よって、例えば、ストレッチ包装装置1の電源を1日中入れたままにしたいという店舗等においては、上述の制御を行うことで作業者が作業を行わない時間帯の消費電力を抑制できるので、有用である。
【0148】
(5)変形例
以上、本発明の実施形態について図面に基づいて説明したが、具体的な構成は、上記の実施形態に限られるものではなく、発明の要旨を逸脱しない範囲で変更可能である。
【0149】
(5−1)変形例1A
上記実施形態では、人体検知センサ120は、投入機構2及び排出台11の近傍に配置されると説明したが、投入機構2又は排出台11の近傍に配置されていればよい。
【0150】
(5−2)変形例1B
上記実施形態では、まず、作業者によってモードスケジュールの初期設定が行われると説明したが、初期設定を行わなくてもよい。例えば、ある一日の投入作業が行われる/行われない時間帯を人体検知センサ120を用いて学習部134が学習することによって、翌日以降のモードスケジュールをモードスケジュール修正部135が作成していってもよい。
【0151】
(5−3)変形例1C
上記実施形態では、モードには、通常モードと、第1スタンバイモードと、第2スタンバイモードとがあると説明したが、これに限られるものではなく、第1スタンバイモードのような省電力モードを増やしてもよい。すなわち、消費電力を段階的に所定電力にするモードを増やしてもよい。例えば、第3スタンバイモードでは、加熱ローラ83の温度が第3温度(例えば、90℃)になるように、第4スタンバイモードでは、加熱ローラ83の温度が第4温度(例えば、70℃)になるように、第5スタンバイモードでは、加熱ローラ83の温度が第5温度(例えば、50℃)になるように、部品制御部138がヒータ84の出力を制御してもよい。
【0152】
(5−4)変形例1D
上記実施形態では、第1スタンバイモードでは、部品制御部138は、加熱ローラ83の温度が第1温度(例えば、10℃)となるようにヒータ84への出力を制御すると説明したが、これに限られるものではなく、第2スタンバイモードにおける第2温度(例えば、110℃)より低ければよい。よって、例えば、ヒータ84への出力を停止してもよい(すなわち、加熱ローラ83の温度が0℃となるように制御してもよい)。
【0153】
(5−5)変形例1E
上記実施形態の通常モードにおいて、作業者が制御装置9に対して入力を行うことによって、投入機構2又はリフター機構30に載せた商品G及びトレーTを、手動で次の工程(次の工程だけでなく、それ以降の工程を行うようにしてもよい)に移行させる移行手動制御が行われてもよい。
【0154】
この場合、モード切替部136は、投入機構2又はリフター機構30に商品G及びトレーTが載っているときは、通常モードを第1スタンバイモードに切り替えない。なお、この場合、投入機構2又はリフター機構30に商品G及びトレーTが載っていることはフラグ等が立てられることにより制御装置9が把握できる。
【0155】
ここでは、例えば、移行手動制御において投入機構やリフター機構に商品及びトレーが載ったままの状態が維持されるような場合(すなわち、作業者が商品及びトレーを載せたことを忘れてストレッチ包装装置から離れているような場合)に、第1スタンバイモード(すなわち、加熱ローラの温度が通常温度よりも比較的下がっている状態)に入ると、次以降の工程に入る操作を行う(作業を再開した)ときに、商品及びトレーに対するフィルムの溶着が悪いものが出てくることが懸念される。そこで、このような状況を避けるために、投入機構2又はリフター機構30に商品G及びトレーTが載っているときは通常モードを第1スタンバイモードに切り替えないようにすることで、商品G及びトレーTに対するフィルムFの溶着性を維持できる。
【0156】
(5−6)変形例1F
ストレッチ包装装置では、安全面の確保のために、電源のON/OFFや、現在のモード状態等を作業者に報知できる状態にあることが好ましい。一方、省エネの観点から、作業者が作業を行っていないときの不要な電力を低減したいという要求が存在する。
【0157】
そこで、上記実施形態では、第1スタンバイモードにおいて表示パネル91のバックライトへの出力を停止しているが、例えば、第1スタンバイモードにおいて(すなわち、作業者の存在が検知されない状態において)、非常停止スイッチ18が押されている状態(すなわち、非常停止状態)のときのみ、表示パネル91のバックライトへの出力を停止してもよい。
【0158】
非常停止状態においては、表示パネル91のバックライト以外の電気消費部品は、停止されている状態にあるため、ストレッチ包装装置1が動作しないといった安全が確保できる状態にある。よって、安全が確保される状態のとき、且つ、人体検知センサ120によって作業者の存在が検知されない状態のときのみ、表示パネル91のバックライトへの出力を停止することで、上述の要求に応えることができる。
【0159】
(5−7)変形例1G
上記実施形態以外にも、第1スタンバイモード及び第2スタンバイモードにおいては、ラベルプリンター15を駆動するモータへの出力を停止(具体的には、ホールド電流を流さないように)してもよい。
【0160】
(5−8)変形例1H
上記実施形態では、部品制御部138は、ステップS13でヒータ84の出力を上げてからステップS15でバックライトへの出力をあげると説明したが、バックライトの出力を上げるのは、ヒータ84の出力を上げるのと同時であってもよい。
【0161】
(5−9)変形例1I
上記実施形態では、第1スタンバイモード及び第2スタンバイモード中にバックアップ作業を行っていると説明したが、第1スタンバイモード及び第2スタンバイモードにおいては、その他の作業を行ってもよい。
【0162】
その他の作業としては、例えば、外部の装置(例えば、遠隔監視装置等の上位システム)とのデータ(バックアップのデータ等)通信が考えられる。当該作業はバックアップ作業と同様にストレッチ包装装置1にとって負荷のかかる作業であると考えられるが、作業者が投入作業を行っていない第1スタンバイモード及び第2スタンバイモード中に当該作業を行うことで、作業者の作業効率を維持できる。
【0163】
(5−10)変形例1J
上記実施形態では、1日毎にモードスケジュールを修正し、当該モードスケジュールに基づいて翌日のモードスケジュールを決定することを例にとって説明したが、これに限られるものではない。例えば、ある曜日のみ所定のスケジュールに基づいて作業者が作業を行っているということを学習部134が学習すれば、モードスケジュール修正部135は、当該曜日はその学習に基づいたモードスケジュールを決定してもよい。
【0164】
(5−11)変形例1K
上記実施形態では、第1スタンバイモードにおいて人体検知センサ120によって作業者の存在が検知され、且つ、スタートボタンが押されたときに、通常モードへ移行すると説明した。しかし、これに限られるものではない。
【0165】
例えば、非常停止スイッチ18が押されているときに第1スタンバイモードに移行している場合は、非常停止状態を解除されたか否かを判定し、解除されていると判定した場合に、通常モードに移行してもよい。
【0166】
(5−12)変形例1L
上記実施形態では、表示パネル91又は操作キー92上に配されるスタートボタンが押されることにより、通常モードを実行すると説明したが、これに限られるものではなく、スタートボタンは、ストレッチ包装装置1の本体1aのどこに配されていてもよい。
【0167】
<第2実施形態>
続いて、本発明の第2実施形態について説明する。
【0168】
第1実施形態では、人体検知センサ120による検知結果を学習部134が学習している。そして、当該学習に基づいてモードスケジュール修正部135が作成したモードスケジュールに基づいて、モード切替部136が、通常モードと第1スタンバイモードとを切り替えている。一方、第2実施形態について簡単に説明すると、人体検知センサ120による検知結果に基づいて、モード切替部136が、通常モードと通常モードよりも消費電力を抑える省エネモードであるスタンバイモードとを切り替えている。以下、第2実施形態の制御について説明する。
【0169】
(1)人体検知センサ120を用いたモードの切り替え
図18は、モード切替部136によるモードの切替動作を示すフローチャートである。
【0170】
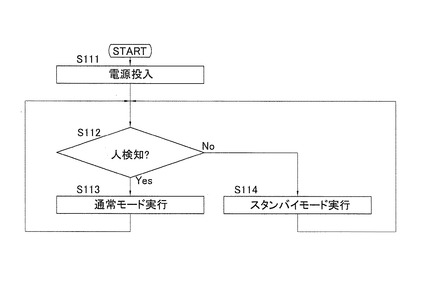
第2実施形態では、まず、ステップS111で電源が投入される。そして、ステップS112で人体検知センサ120により投入作業を行う作業者の存在が検知されたかを判定する。検知されたと判定する場合は、ステップS113へ移行して、通常モードを行う。他方、検知されていないと判定する場合は、スタンバイモードを行う。
【0171】
なお、ここでのスタンバイモードでは、部品制御部138は、第1実施形態と同様の制御を行うが、加熱ローラ83の温度は、所定温度(例えば、110℃)となるようにヒータ84の出力を制御する。これは、例えば、一旦投入作業を行わなくなった作業者が投入作業を再開する際に、ストレッチ包装装置1の立ち上げを早くするためである。
【0172】
(2)特徴
第2実施形態では、モード切替部136は、人体検知センサ120による検知結果に基づいて、通常モードとスタンバイモードとを切り替える。具体的には、人体検知センサ120によって作業者の存在が検知されない場合には、省エネモードであるスタンバイモードを行い、人体検知センサ120によって作業者の存在が検知される場合は、通常モードを行う。
【0173】
ここでは、人体検知センサ120が、投入作業を行う作業者の存在/非存在を検知できることから、これを生かした制御を行っている。これにより、作業者が投入作業を行わない場合の消費電力を抑制できるので、省エネ及び省コストに貢献する。
【0174】
(3)変形例
上記実施形態では、スタンバイモードにおける加熱ローラ83の温度は、所定温度(例えば、110℃)となるようにヒータ84の出力を制御すると説明したが、これに限られるものではなく、所定温度は、それ以下であってもよい。例えば、作業者によるストレッチ包装装置1の使用が頻繁でない場合には、人体検知センサ120によって作業者の存在が検知されない場合にヒータ84の出力を比較的大きく落とせば、消費電力を低減でき、省エネ及び省コストに貢献する。
【産業上の利用可能性】
【0175】
本発明は、包装装置、特に、緊張保持させたフィルムに被包装物を押し付けるストレッチ機能を有するストレッチ包装装置に種々適用可能である。
【符号の説明】
【0176】
1 ストレッチ包装装置
2 投入機構(被包装物投入部)
9 制御装置
9a 入出力部(入力受付部,表示手段)
9b 制御部
11 排出台(被包装物排出部)
30 リフター機構(昇降部)
83 加熱ローラ(加熱部材)
84 ヒータ(加熱手段)
91 表示パネル
120 人体検知センサ(人体検知手段)
134 学習部
135 モードスケジュール修正部
136 モード切替部
137 バックアップ実行部
138 部品制御部(加熱手段制御部,表示手段制御部)
F フィルム(包装材)
G 商品(被包装物)
T トレー(被包装物)
【先行技術文献】
【特許文献】
【0177】
【特許文献1】特開平11−79138号公報
【特許請求の範囲】
【請求項1】
被包装物が投入される被包装物投入部と、
前記被包装物が包装された状態で排出される被包装物排出部と、
投入された被包装物を包装して排出するための複数の電気消費部品と、
前記電気消費部品を制御する制御部と、
を備え、
前記被包装物投入部、及び/又は、前記被包装物排出部の近傍には、前記被包装物の投入を行う人の存在を検出する人体検知手段が配置され、
前記制御部は、前記人体検知手段による検知結果に基づいて、通常モードと前記通常モードよりも消費電力を抑える第1スタンバイモードとを切り替えるモード切替部、を有する、
ストレッチ包装装置。
【請求項2】
前記制御部は、
時間帯と前記人体検知手段による検知結果との関係を学習する学習部と、
前記第1スタンバイモードを行う第1スタンバイモード時間帯を、前記学習部による学習に基づいて決定する決定部と、
をさらに有する、
請求項1に記載のストレッチ包装装置。
【請求項3】
前記被包装物排出部の近傍に配置され、前記被包装物の包装材を熱シールするための加熱部材をさらに備え、
複数の前記電気消費部品には、前記加熱部材を加熱するための加熱手段が含まれ、
前記制御部は、前記加熱手段を制御する加熱手段制御部をさらに有し、
前記モード切替部は、前記通常モードよりも消費電力を抑え前記第1スタンバイモードよりも消費電力を抑えない第2スタンバイモードに、さらに切り替え、
前記加熱手段制御部は、前記第1スタンバイモードにおいて、前記加熱部材の温度が、前記通常モードにおける通常温度よりも低い第1温度になるように前記加熱手段を制御し、前記第2スタンバイモードにおいて、前記加熱部材の温度が、前記第1温度よりも高く前記通常温度よりも低い第2温度になるように前記加熱手段を制御する、
請求項2に記載のストレッチ包装装置。
【請求項4】
前記加熱手段制御部は、前記第1スタンバイモード時間帯が終了する所定時間前に、前記加熱部材の温度が前記第1温度から前記通常温度に近付くように前記加熱手段を制御する、
請求項3に記載のストレッチ包装装置。
【請求項5】
前記モード切替部は、前記通常モードにおいて前回の被包装物が排出されてから所定時間を経過しても次回の被包装物が排出されない場合に、前記通常モードから前記第2スタンバイモードに切り替える、
請求項3に記載のストレッチ包装装置。
【請求項6】
前記第1スタンバイモードにおいて前記人体検知手段が人の存在を検知した場合に前記通常モードへ移行するか否かの入力を受け付ける入力受付部、をさらに備え、
前記モード切替部は、前記入力受付部が前記通常モードへの移行の入力を受け付けた場合に、前記第1スタンバイモードを前記通常モードに切り替える、
請求項1〜5のいずれか1項に記載のストレッチ包装装置。
【請求項7】
前記被包装物投入部に投入された被包装物を、前記被包装物投入部に隣接する包装空間において上下に昇降する昇降部をさらに備え、
前記通常モードには、前記被包装物投入部又は前記昇降部に載せた前記被包装物を、手動で次の工程に移行させる移行手動制御が含まれ、
前記モード切替部は、前記通常モードにおいて前記移行手動制御が行われており、前記被包装物投入部又は前記昇降部に前記被包装物が載っているときは、前記通常モードを前記第1スタンバイモードに切り替えない、
請求項1〜6のいずれか1項に記載のストレッチ包装装置。
【請求項8】
複数の前記電気消費部品には、少なくとも前記被包装物の情報を表示する表示手段が含まれ、
前記制御部は、前記表示手段への出力を制御する表示手段制御部をさらに有し、
前記表示手段制御部は、前記第1スタンバイモードにおいて非常停止状態となった場合に、前記表示手段への出力を停止する、
請求項1〜7のいずれか1項に記載のストレッチ包装装置。
【請求項9】
前記第1スタンバイモード又は前記第2スタンバイモードにおいて、バックアップを行うバックアップ実行部、をさらに備える、
請求項3〜5のいずれか1項に記載のストレッチ包装装置。
【請求項1】
被包装物が投入される被包装物投入部と、
前記被包装物が包装された状態で排出される被包装物排出部と、
投入された被包装物を包装して排出するための複数の電気消費部品と、
前記電気消費部品を制御する制御部と、
を備え、
前記被包装物投入部、及び/又は、前記被包装物排出部の近傍には、前記被包装物の投入を行う人の存在を検出する人体検知手段が配置され、
前記制御部は、前記人体検知手段による検知結果に基づいて、通常モードと前記通常モードよりも消費電力を抑える第1スタンバイモードとを切り替えるモード切替部、を有する、
ストレッチ包装装置。
【請求項2】
前記制御部は、
時間帯と前記人体検知手段による検知結果との関係を学習する学習部と、
前記第1スタンバイモードを行う第1スタンバイモード時間帯を、前記学習部による学習に基づいて決定する決定部と、
をさらに有する、
請求項1に記載のストレッチ包装装置。
【請求項3】
前記被包装物排出部の近傍に配置され、前記被包装物の包装材を熱シールするための加熱部材をさらに備え、
複数の前記電気消費部品には、前記加熱部材を加熱するための加熱手段が含まれ、
前記制御部は、前記加熱手段を制御する加熱手段制御部をさらに有し、
前記モード切替部は、前記通常モードよりも消費電力を抑え前記第1スタンバイモードよりも消費電力を抑えない第2スタンバイモードに、さらに切り替え、
前記加熱手段制御部は、前記第1スタンバイモードにおいて、前記加熱部材の温度が、前記通常モードにおける通常温度よりも低い第1温度になるように前記加熱手段を制御し、前記第2スタンバイモードにおいて、前記加熱部材の温度が、前記第1温度よりも高く前記通常温度よりも低い第2温度になるように前記加熱手段を制御する、
請求項2に記載のストレッチ包装装置。
【請求項4】
前記加熱手段制御部は、前記第1スタンバイモード時間帯が終了する所定時間前に、前記加熱部材の温度が前記第1温度から前記通常温度に近付くように前記加熱手段を制御する、
請求項3に記載のストレッチ包装装置。
【請求項5】
前記モード切替部は、前記通常モードにおいて前回の被包装物が排出されてから所定時間を経過しても次回の被包装物が排出されない場合に、前記通常モードから前記第2スタンバイモードに切り替える、
請求項3に記載のストレッチ包装装置。
【請求項6】
前記第1スタンバイモードにおいて前記人体検知手段が人の存在を検知した場合に前記通常モードへ移行するか否かの入力を受け付ける入力受付部、をさらに備え、
前記モード切替部は、前記入力受付部が前記通常モードへの移行の入力を受け付けた場合に、前記第1スタンバイモードを前記通常モードに切り替える、
請求項1〜5のいずれか1項に記載のストレッチ包装装置。
【請求項7】
前記被包装物投入部に投入された被包装物を、前記被包装物投入部に隣接する包装空間において上下に昇降する昇降部をさらに備え、
前記通常モードには、前記被包装物投入部又は前記昇降部に載せた前記被包装物を、手動で次の工程に移行させる移行手動制御が含まれ、
前記モード切替部は、前記通常モードにおいて前記移行手動制御が行われており、前記被包装物投入部又は前記昇降部に前記被包装物が載っているときは、前記通常モードを前記第1スタンバイモードに切り替えない、
請求項1〜6のいずれか1項に記載のストレッチ包装装置。
【請求項8】
複数の前記電気消費部品には、少なくとも前記被包装物の情報を表示する表示手段が含まれ、
前記制御部は、前記表示手段への出力を制御する表示手段制御部をさらに有し、
前記表示手段制御部は、前記第1スタンバイモードにおいて非常停止状態となった場合に、前記表示手段への出力を停止する、
請求項1〜7のいずれか1項に記載のストレッチ包装装置。
【請求項9】
前記第1スタンバイモード又は前記第2スタンバイモードにおいて、バックアップを行うバックアップ実行部、をさらに備える、
請求項3〜5のいずれか1項に記載のストレッチ包装装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2012−176771(P2012−176771A)
【公開日】平成24年9月13日(2012.9.13)
【国際特許分類】
【出願番号】特願2011−40708(P2011−40708)
【出願日】平成23年2月25日(2011.2.25)
【出願人】(000147833)株式会社イシダ (859)
【公開日】平成24年9月13日(2012.9.13)
【国際特許分類】
【出願日】平成23年2月25日(2011.2.25)
【出願人】(000147833)株式会社イシダ (859)
[ Back to top ]