
ストレッチ包装装置
【課題】省スペース化を図ることができるストレッチ包装装置を提供する。
【解決手段】緊張保持させたフィルムに対して被包装物を押し付けることによって被包装物を包装する包装部と、包装部にフィルムを搬送する搬送機構と、搬送機構の駆動を制御する制御部とを備える。また、搬送機構は、フィルムを包装部に移動させる搬送部材と、少なくともフィルムの先端を掴むために、搬送部材の掴み部をフィルムに接触していないフィルム非接触状態からフィルムに接触するフィルム接触状態に変更する搬送部材状態変更部材と、フィルムの引き伸ばし動作、及び/又は、フィルムの折り込み動作においてフィルムを把持するフィルム把持状態を採る把持部材とを有する。制御部は、把持部材がフィルム把持状態を採るときに、搬送部材状態変更部材を制御することによって搬送部材の掴み部をフィルム接触状態にできる。
【解決手段】緊張保持させたフィルムに対して被包装物を押し付けることによって被包装物を包装する包装部と、包装部にフィルムを搬送する搬送機構と、搬送機構の駆動を制御する制御部とを備える。また、搬送機構は、フィルムを包装部に移動させる搬送部材と、少なくともフィルムの先端を掴むために、搬送部材の掴み部をフィルムに接触していないフィルム非接触状態からフィルムに接触するフィルム接触状態に変更する搬送部材状態変更部材と、フィルムの引き伸ばし動作、及び/又は、フィルムの折り込み動作においてフィルムを把持するフィルム把持状態を採る把持部材とを有する。制御部は、把持部材がフィルム把持状態を採るときに、搬送部材状態変更部材を制御することによって搬送部材の掴み部をフィルム接触状態にできる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ストレッチ包装装置に関する。
【背景技術】
【0002】
生鮮食料品などの被包装物を包装する装置として、ストレッチ包装装置が知られている。ストレッチ包装装置には、例えば、特許文献1(特開平9−12004号公報)に開示のように、包装部においてプリストレッチがされた状態のフィルムに対して被包装物を押し上げ、その状態で、フィルムを被包装物の下側に折り込んで包装するものがある。当該文献に記載のストレッチ包装装置では、フィルムロールから繰り出されたフィルムは、フィルムフィード手段によって、包装部に搬送されている。
【発明の概要】
【発明が解決しようとする課題】
【0003】
ここで、ストレッチ包装装置は、例えば、スーパー等の店舗のバックヤードに設置される。店舗のバックヤードでは、さまざまな作業が行われているため、ストレッチ包装装置はコンパクト化されることが望ましい。
【0004】
そこで、本発明の課題は、省スペース化を図ることができるストレッチ包装装置を提供することにある。
【課題を解決するための手段】
【0005】
本発明に係るストレッチ包装装置は、包装部と、搬送機構と、制御部とを備える。包装部は、緊張保持させたフィルムに対して被包装物を押し付けることによって被包装物を包装する。搬送機構は、包装部にフィルムを搬送する。制御部は、搬送機構の駆動を制御する。また、搬送機構は、搬送部材と、搬送部材状態変更部材と、把持部材とを有する。搬送部材は、フィルムを包装部に移動させる。搬送部材状態変更部材は、少なくともフィルムの先端を掴むために、搬送部材の掴み部をフィルム非接触状態からフィルム接触状態に変更する。フィルム非接触状態とは、フィルムに接触していない状態である。フィルム接触状態とは、フィルムに接触する状態である。把持部材は、フィルムの引き伸ばし動作、及び/又は、フィルムの折り込み動作においてフィルム把持状態を採る。フィルム把持状態とは、フィルムを把持する状態である。制御部は、把持部材がフィルム把持状態を採るときに、搬送部材状態変更部材を制御することによって搬送部材の掴み部をフィルム接触状態にできる。
【0006】
ここでは、搬送部材状態変更部材を制御することで搬送部材の掴み部をフィルム接触状態にすることができる。よって、搬送部材を用いてフィルムを掴むことができる。すなわち、搬送部材を、フィルムを掴むためのものとして機能させることができる。これにより、別途、フィルムを掴むためのものをたくさん配置しなくてもよいので、省スペース化を図ることができる。
【0007】
別の本発明に係るストレッチ包装装置は、包装部と、搬送機構と、制御部とを備える。包装部は、緊張保持させたフィルムに対して被包装物を押し付けることによって被包装物を包装する。搬送機構は、包装部にフィルムを搬送する。制御部は、搬送機構の駆動を制御する。搬送機構は、搬送部材と、搬送部材状態変更部材と、把持部材とを有する。搬送部材は、フィルムの両面に接触してフィルムを包装部に移動させる。また、搬送部材は、第1搬送部と第2搬送部とを含む。第1搬送部は、フィルムの一方の面に接触する。第2搬送部は、フィルムの他方の面に接触する。搬送部材状態変更部材は、少なくともフィルムの先端を掴むために、第1搬送部のフィルムの一方の面に接触する掴み面を、フィルム非接触状態からフィルム接触状態に変更する。フィルム非接触状態とは、フィルムに接触していない状態である。フィルム接触状態とは、フィルムに接触する状態である。把持部材は、フィルムの引き伸ばし動作、及び/又は、フィルムの折り込み動作においてフィルム把持状態を採る。フィルム把持状態とは、フィルムを把持する状態である。制御部は、把持部材がフィルム把持状態を採るときに、搬送部材状態変更部材を制御することによって掴み面をフィルム接触状態にできる。
【0008】
ここでは、搬送部材状態変更部材を制御することで第1搬送部の掴み面をフィルム接触状態にすることができる。よって、搬送部材を用いてフィルムを掴むことができる。すなわち、搬送部材を、フィルムを掴むためのものとして機能させることができる。これにより、別途、フィルムを掴むためのものをたくさん配置しなくてもよいので、省スペース化を図ることができる。
【0009】
また、制御部は、引き伸ばし動作において把持部材がフィルム把持状態を採るときに、搬送部材状態変更部材を制御することによって搬送部材の掴み部を前記フィルム接触状態とすることが好ましい。引き伸ばし動作において、搬送部の掴み部をフィルム接触状態とすることで、搬送部の掴み部がフィルムに対して荷重をかけることが可能になる。よって、搬送部材の掴み部を把持部材として機能させることが可能になる。
【0010】
また、搬送状態変更部材は、所定軸を支軸として回動可能であることが好ましく、制御部は、搬送部材状態変更部材を制御することによって、搬送部材の掴み部を所定軸を支軸として回動させることが好ましい。これにより、簡易にフィルムを掴むことができる。
【0011】
また、搬送部材状態変更部材は、フィルム接触状態において、その長手方向が略水平方向となるように配置される好ましい。
【0012】
また、搬送部材は、搬送ベルトであり、搬送部材状態変更部材の一部には、搬送ベルトが掛けられることが好ましい。
【発明の効果】
【0013】
本発明に係るストレッチ包装装置では、省スペース化を図ることができる。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施形態であるストレッチ包装装置の外観斜視図。
【図2】ストレッチ包装装置の内部の正面概略図(フィルム差し込み板ユニットが第1位置を採る場合)。
【図3】図2のIII−IIIの矢視斜視図。
【図4】ストレッチ包装装置の内部の正面概略図(フィルム差し込み板ユニットが第2位置を採る場合)。
【図5】フィルム差し込み板ユニットの概略平面図。
【図6】ストレッチ包装装置の内部の平面概略図。
【図7】フィーダユニット及びフィーダ駆動ユニットの相関図。
【図8】第1フィーダユニットの正面図。
【図9】第1フィーダユニットの斜視図。
【図10】ベルトユニットの着目図。
【図11】第1フィーダユニットの側面図。
【図12】第1及び第2フィーダユニットの一部の概略斜視図。
【図13】受け取りユニットの概略斜視図。
【図14】クランプユニットを含んだフィーダユニットの平面図。
【図15】シール機構の平面図。
【図16】制御装置とフィルム搬送機構との結線図
【図17】制御装置の制御ブロック図。
【図18】ストレッチ包装装置の動作説明図。
【図19】ストレッチ包装装置の動作説明図。
【図20】ストレッチ包装装置の動作説明図。
【図21】ストレッチ包装装置の動作説明図。
【図22】ストレッチ包装装置の動作説明図。
【図23】フィルム搬送の説明図。
【図24】フィルム搬送の説明図。
【図25】フィルム搬送の説明図。
【図26】フィルム搬送の説明図。
【図27】フィルム搬送の説明図。
【図28】第1及び第2フィーダユニットの動作説明図。
【図29】フィルムの折り込み動作の説明図。
【図30】フィルムの折り込み動作の説明図。
【図31】フィルムの折り込み動作の説明図。
【図32】フィルムの折り込み動作の説明図。
【発明を実施するための形態】
【0015】
以下、図面を参照しながら、本発明の一実施形態に係るストレッチ包装装置1について説明する。
【0016】
(1)ストレッチ包装装置1
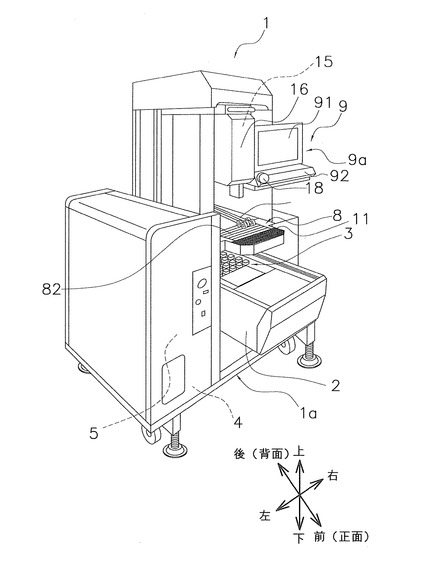
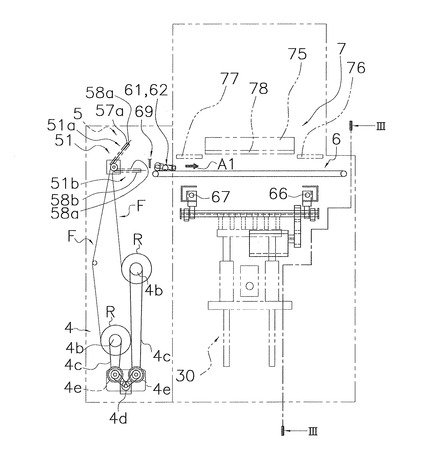
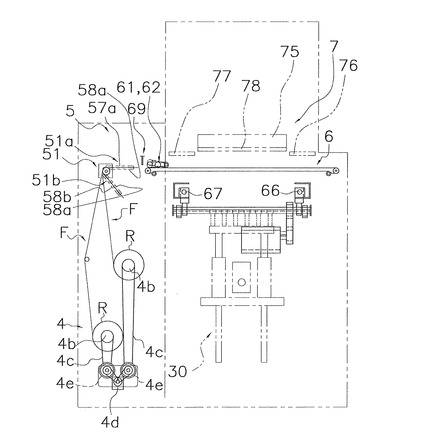
図1は、ストレッチ包装装置1の外観斜視図である。図2は、ストレッチ包装装置1の内部の正面概略図である(フィルム差し込み板ユニット51が第1位置を採る場合)。図3は、図2のIII−IIIの矢視斜視図である。図4は、ストレッチ包装装置1の内部の正面概略図である(フィルム差し込み板ユニット51が第2位置を採る場合)図5は、フィルム差し込み板ユニット51の概略側面図である。図6は、ストレッチ包装装置1の内部の平面概略図である。図7は、フィーダユニット61,62及びフィーダ移動ユニット63,64の相関図である。
【0017】
以下の説明において、前後左右、上下、正面、背面といった方向を示す言葉を用いるが、当該方向は、特にことわりのない限り、図1の右下に示す方向を意味するものとする。
【0018】
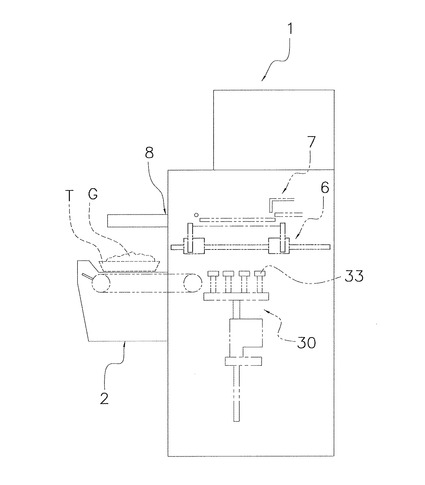
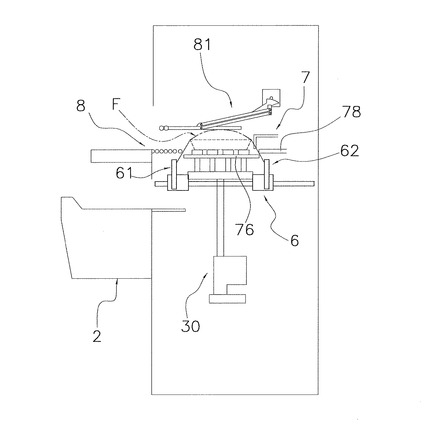
まず、ストレッチ包装装置1について簡略に説明する。ストレッチ包装装置1は、緊張保持させたストレッチフィルムF(図2等を参照)に対して、生鮮食品等の商品G(図3等を参照)を収容したトレーT(図3等を参照)(これらは、被包装物に相当)を押し上げ、フィルムFの周辺部をトレーTの下側に折り込むことによってトレーTのフィルム包装を行う装置である。ストレッチ包装装置1は、フィルム包装機能に加えて、計量機能やラベル貼り付けによる値付け機能も兼ねている。なお、商品GがトレーTに収容されない状態で包装される場合もある。
【0019】
以下、ストレッチ包装装置1の構成について、図1〜図7を用いて説明する。
【0020】
ストレッチ包装装置1は、投入機構2と、包装ステーション3と、ロール支持機構4と、フィルム送り出し機構5と、フィルム搬送機構6と、折り込み機構7と、シール機構8と、排出台11とを備えている。
【0021】
(1−1)投入機構2
投入機構2は、本体1aの正面中央部に設けられており、商品Gを収容したトレーTが本体1a内へ投入される投入部として機能する。投入機構2は、トレーTに収容された商品Gの重量を計量する計量器と、計量器上に載置される計量皿と、一対のローラ間に建設された複数の搬入ベルトとを有している。搬入ベルトには、搬送用の突起が設けられており、商品Gを収容したトレーTを、図3に示すように計量器上(計量皿上)に載置すれば、商品Gの重量が計量器により計量された後、トレーTが正面側から搬入ベルトに固定された突起に押されて、包装ステーション3のリフター機構30(後述する)の支持部材33上に送られる。
【0022】
ここで、突起を正面側から背面側へと駆動する駆動モータには、DCブラッシュレスモータを使用している。当該DCブラッシュレスモータは、加減速が調整可能なモータであり、エンコーダが取り付けられている。
【0023】
なお、投入機構2により計量された商品Gの重量に基づいて、制御装置9(後述する)が商品Gの価格の算出している。
【0024】
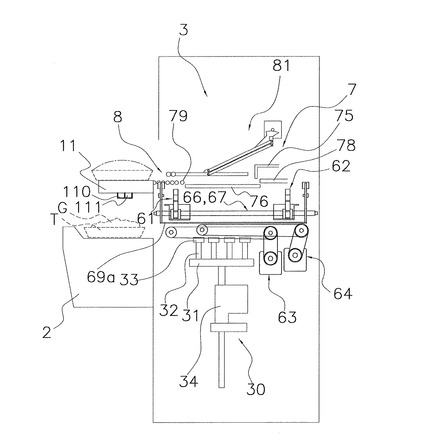
(1−2)包装ステーション3
包装ステーション3は、本体1a内に形成される包装空間であって、投入機構2に隣接する。包装ステーション3は、計量が終わった商品Gを含んだトレーTに一連のフィルム包装を行う包装部としての役割を有する。この包装ステーション3では、フィルム搬送機構6によってストレッチフィルムFが張られ、張られたストレッチフィルムFに対して、リフター機構30が商品Gが収容されたトレーTを押し付ける(図20を参照)。そして、折り込み機構7がストレッチフィルムFを押し付けた状態のトレーTの下側へとストレッチフィルムFの周囲の部分を折り込むことによって、トレーT及び商品GがストレッチフィルムFで覆われた状態となる。
【0025】
この包装ステーション3の下部には、リフター機構30が設けられている。リフター機構30は、トレーTの底面を保持してトレーT及び商品Gを上下に昇降する昇降機構として機能する。
【0026】
リフター機構30は、図3に示すように、支持ベース31と、支持ベース31上に固定された複数の支持バー32と、各支持バー32の上端部にそれぞれ回動自在に支持されトレーTの底面を受ける支持部材33とを有している。また、リフター機構30の下部には、支持ベース31を上下移動させる電動ボールネジ機構34が配置される。
【0027】
なお、各支持バー32は、その中央部分に前後左右に折れ曲がるヒンジを備えており、当該ヒンジは、左右折り込み板76,77(後述する、図2や図3を参照)や後折り込み板78(後述する)がトレーTの下部に入ってくるときに一時的に転倒するように構成されている。
【0028】
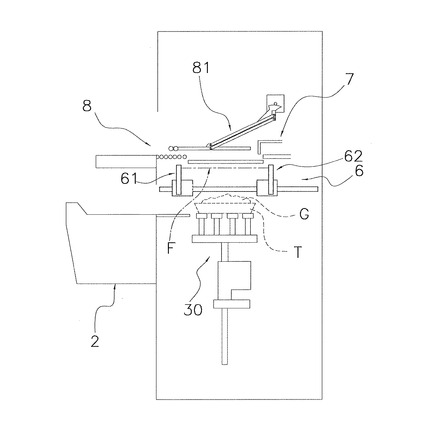
また、包装ステーション3の上部には、押さえ機構81が配置されている。押さえ機構81は、電動ボールネジ機構34によって、リフター機構30に載っている商品G及びトレーTが突き上げられてとまったときにトレーTや商品Gが姿勢を崩して転倒することを抑える。
【0029】
(1−3)ロール支持機構4
ロール支持機構4は、フィルムロールRを支持する機構であり、図2に示すように、本体1aの側部(具体的には、左側部)に配置されている。ロール支持機構4は、主として、2つのロールバー(図示せず)から構成されている。ロールバーは、フィルムロールRを挿通させ、ホルダー等でフィルムロールRを保持する。ロールバーは、本体1aに回転自在となるように支持されている。ロールバーの一端には、プーリ4bが固定されており、プーリ4bには、ベルト4cが掛けられている。2つのロールバーは、互いに上下左右方向にずれるように配置されている。
【0030】
ベルト4cは、1つのフィルムロール駆動モータ4dによって駆動される。フィルムロール駆動モータ4dは、正逆回転が可能であり、正回転時に一方のロールバーに挿通されるフィルムロールRが回転されるように、他方、逆回転時に、他方のロールバーに挿通されるフィルムロールRが回転されるように駆動する。ベルト4cとフィルムロール駆動モータ4dとの間には、ワンウェイクラッチ4eが設けられている。
【0031】
(1−4)フィルム送り出し機構5
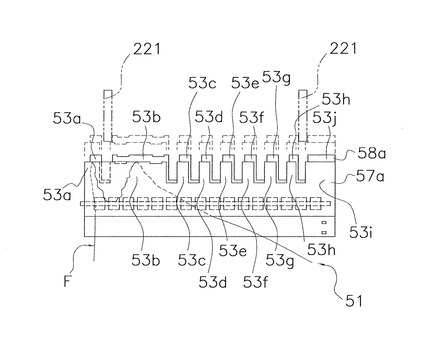
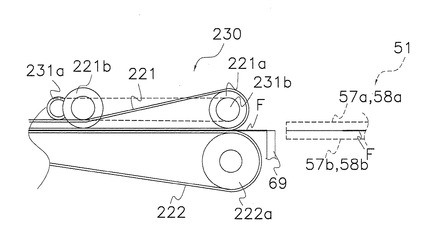
フィルム送り出し機構5は、フィルムロールRから引き出されたフィルムFを、フィルム搬送機構6(具体的には、後述する一対のフィーダユニット61,62)に送り出す(受け渡す)ための機構である。フィルム送り出し機構5は、図2や図5に示すように、主として、フィルムFを保持するためのフィルム差し込み板ユニット51と、フィルム差し込み板ユニット51を、所定軸を支点として回動させるフィルム差し込み板駆動モータ(図示せず)とから構成されている。
【0032】
フィルム差し込み板ユニット51は、主として2枚の板部材57a,58aから構成される第1フィルム差し込み板51aと、主として2枚の板部材57b,58bから構成される第2フィルム差し込み板51bとを有する。
【0033】
フィルム差し込み板ユニット51は、フィルムロールRの上方に配置されており、フィルムロールRの長手方向に沿って延びている。なお、フィルム差し込み板ユニット51の長手方向の長さは、フィルムロールRの長手方向の長さよりも長い。
【0034】
2枚の板部材57a,58a、57b,58bには、それぞれ、切り欠き53a〜53iが形成されている(なお、図5では、板部材57a,58aのみを図示しているが、板部材57b,58bについても同様の構成である)。切り欠き53aと、切り欠き53b〜53iとの距離は、それぞれ、異なるフィルム幅の数種類のフィルムFに対応した距離となっている。例えば、切り欠き53aの外側と切り欠き53iの外側との距離は、最もフィルム幅が大きいフィルムFのフィルム幅に概ね一致している。
【0035】
2枚の板部材57a,58a、57b,58bは、それぞれ、一端が図示しないヒンジで連結されており、開閉が可能である。これにより、作業者は、フィルムFを、板部材57aと板部材58aとの間、板部材57bと板部材58bとの間に簡易に差し込むことができる。板部材57aと板部材58aとは、図5に示すように、略同形状である。板部材57bと板部材58bとも同様に、略同形状である。
【0036】
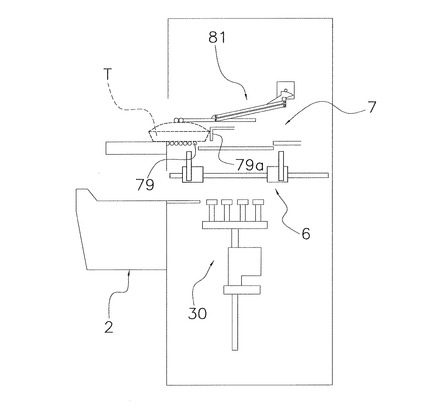
フィルム差し込み板駆動モータは、フィルム差し込み板ユニット51を、ヒンジ部分を軸として所定の範囲内で回動させる。フィルム差し込み板駆動モータによって、フィルム差し込み板ユニット51は、例えば、第1位置(図2の一点鎖線で示す位置)と、第1位置よりも下方に位置する第2位置(図4の二点鎖線で示す位置)とを採ることができる。具体的には、第1位置は、第2フィルム差し込み板51bがその長手方向が略水平方向に延びるような位置(後述するベルトユニット220と略平行になる位置)である。第2位置は、第1フィルム差し込み板51aが、その長手方向が略水平方向に延びるような位置(ベルトユニット220と略平行となる位置)である。
【0037】
なお、フィルム差し込み板ユニット51は、ストレッチ包装装置1が稼動している間は、第1位置及び第2位置のいずれかに位置する。フィルム差し込み板ユニット51の位置の選択は、2つ配置されるフィルムロールRのいずれを使用するかによって決定し、後述する制御装置9を介して作業者等が行う。より具体的には、フィルム差し込み板ユニット51は、上方に位置するフィルムロールRが選択される場合は、第1位置を採り、下方に位置するフィルムロールRが選択される場合は、第2位置を採る。
【0038】
また、フィルム差し込み板駆動モータは、フィルム差し込み板ユニット51を、フィルム搬送機構6側に水平に移動させる。これにより、フィルム搬送機構5は、フィルム搬送機構6にロール支持機構4で保持するフィルムFを受け渡すことができる。動作については、後に詳述する。
【0039】
(1−5)フィルム搬送機構6
フィルム搬送機構6は、フィルム送り出し機構5から送られるフィルムFを受け取り、当該フィルムFを包装ステーション3の中央部分へと搬送する。フィルム搬送機構6は、フィルムFを包装ステーション3へと搬送した後、後述する引き伸ばし動作を行うことでフィルムFを緊張保持する。
【0040】
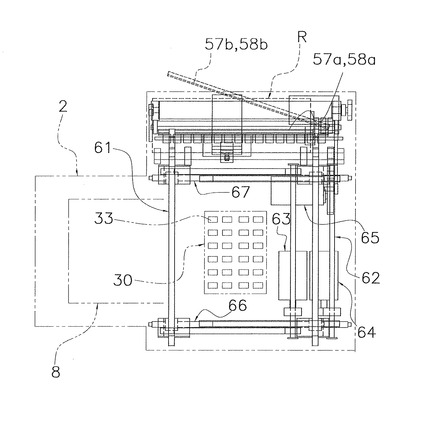
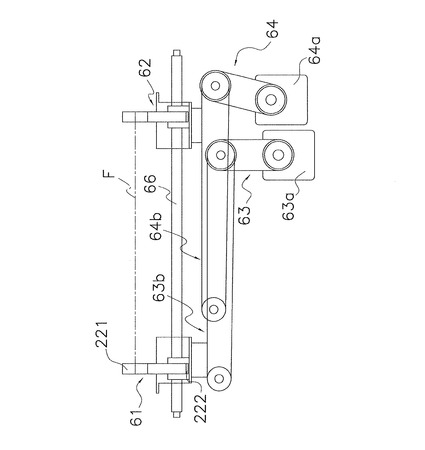
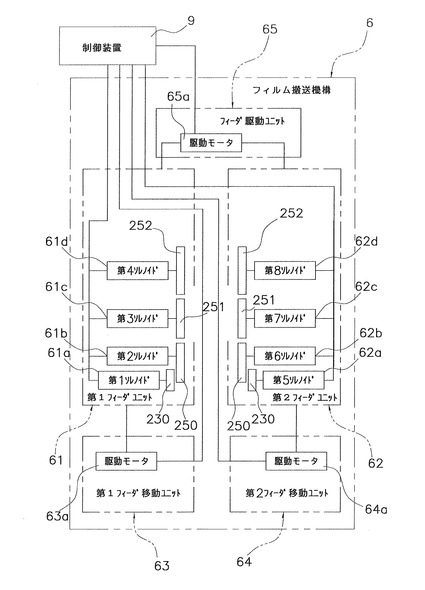
フィルム搬送機構6は、主として、第1フィーダユニット61と、第2フィーダユニット62と、第1フィーダ移動ユニット63と、第2フィーダ移動ユニット64と、フィーダ駆動ユニット65とを有する。
【0041】
図6に示すように、第1フィーダユニット61は、本体1aの正面側部分に配置されている。第2フィーダユニット62は、本体1aの背面側部分に配置されている。
【0042】
第1フィーダユニット61及び第2フィーダユニット62は、フィルム差し込み板ユニット51によって保持されるフィルムFの幅方向の両側部(すなわち、正面側部分及び背面側部分)を上下のベルト(後述する上ベルト221及び下ベルト222)で挟み、フィーダ駆動ユニット65によってフィルムFを矢印A1(図2を参照)に示す方向へと搬送する。
【0043】
また、第1フィーダユニット61は、第1移動フィーダユニット63の作動により、第2フィーダユニット62は、第2移動フィーダユニット64の作動により、それぞれフィルムFの幅方向に移動するように構成されている。それぞれのフィーダユニット61,62は、フィルムFの幅方向に沿って伸びるスライドシャフト66,67によって、2箇所でフィルムFの幅方向に移動自在にされている。
【0044】
図7に示すように、各フィーダ移動ユニット63,64は、駆動モータ63a,64aと、当該駆動モータ63a,64aの作動によりフィルムFの幅両方向に移動するベルト63b,64bとを有している。そして、各フィーダユニット61,62が各ベルト63b,64bの作動でフィーダユニット61,62がそれぞれ別個にフィルムFの移動を行い得るようになっている。
【0045】
以下、第1フィーダユニット61及び第2フィーダユニット62の詳細構成について説明する。なお、第1フィーダユニット61と第2フィーダユニット62とは、概ね同様の構成を有するので、以下では、第1フィーダユニット61を例にとって説明する。
【0046】
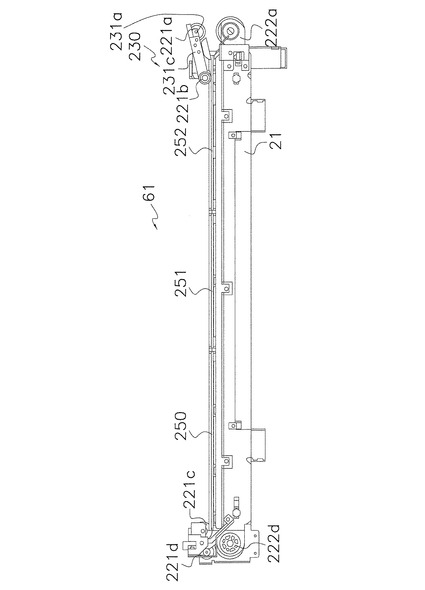
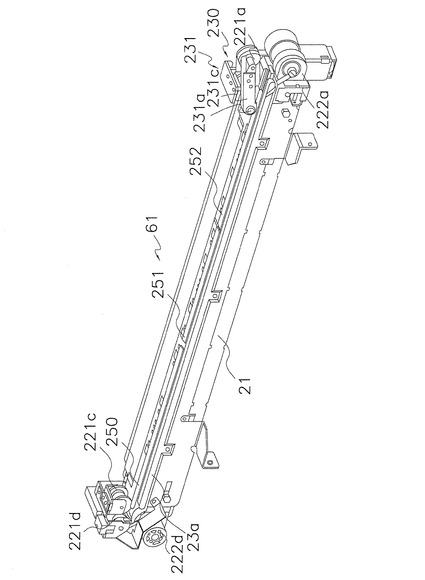
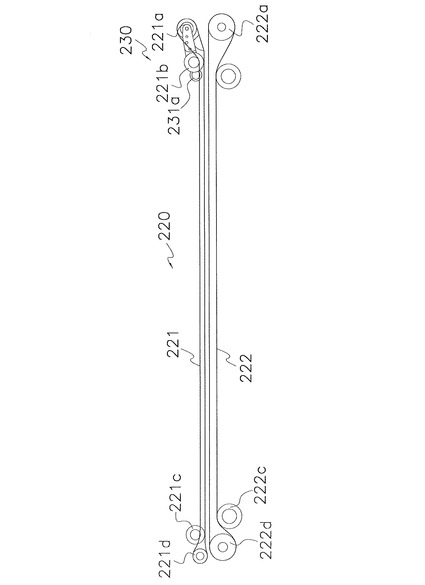
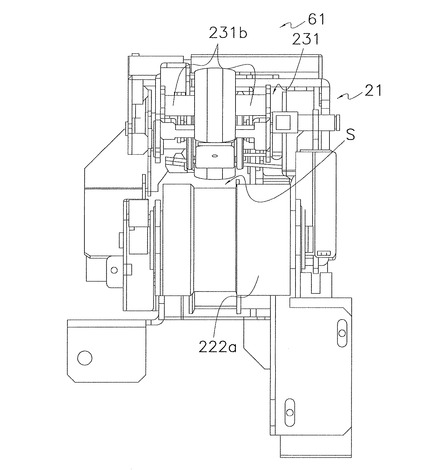
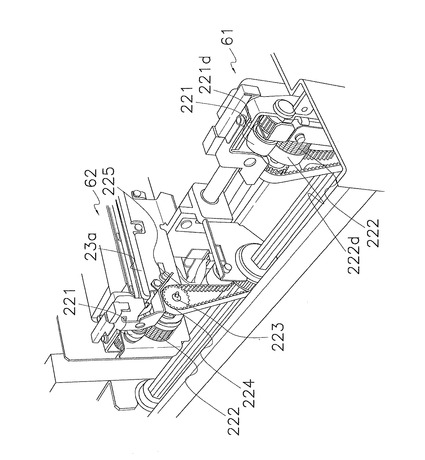
図8は、第1フィーダユニット61の正面図である。図9は、第1フィーダユニット61の斜視図である。図10は、図8や図9では図示していない上ベルト221及び下ベルト23に着目した図である。図11は、第1フィーダユニット61の側面図である。図12は、第1及び第2フィーダユニット61,62の一部の概略斜視図である。図13は、受け取りユニット230含む周辺の概略斜視図である。図14は、クランプ250〜252を説明するために第1フィーダユニット61及び第2フィーダユニット62からクランプ250〜252を抽出したものである。図16は、後述する制御装置9とフィルム搬送機構6との結線図である。
【0047】
図8〜図14に示すように、第1フィーダユニット61は、フレーム21と、搬送ユニット22と、クランプユニット23とを有している。
【0048】
フレーム21は、上ベルト221及び下ベルト222を支持する各プーリや、受け取りユニット230及び各クランプ250〜252を駆動するソレノイド61a〜61d(図16を参照)を支持するもので、第1フィーダユニット61の骨格を構成している。
【0049】
搬送ユニット22は、主として、ベルトユニット220と、受け取りユニット230とを有する。
【0050】
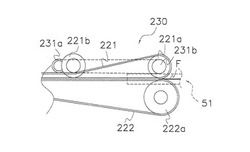
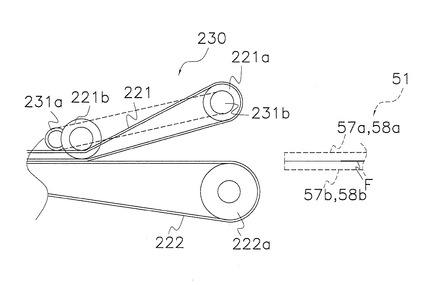
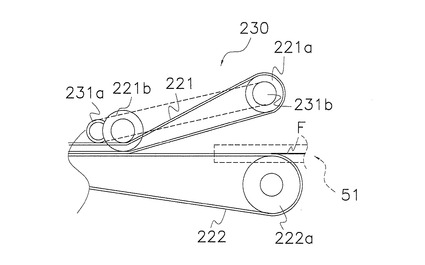
ベルトユニット220は、フィルムFの両面に接触して当該フィルムFを包装ステーション3へと搬送するものであり、上ベルト221と、下ベルト222とから構成される。上ベルト221は、フィルムFの一方の面である上面に接触するものであり、下ベルト222の上に乗っている。上ベルト221は、図10に示すように、4つのプーリ221a,221b,221c,221dに掛けられる。
【0051】
下ベルト222は、フィルムFの他方の面である下面に接触する。下ベルト222は、図10に示すように、4つのプーリ222a,222b,222c,222dに掛けられる。そして、当該4つのプーリ222a,222b,222c,222dのうち1つ(ここでは、プーリ222d)には、図12に示すように、回転軸223を介してプーリ224が接続されている。プーリ224には、ベルト225が掛けられており、駆動モータ65a(ここでは、DCブラッシュレスモータが使用されている)が制御装置9により駆動されると、当該ベルト225を介して、プーリ224にはフィーダ駆動ユニット65の駆動モータ65aによる駆動力が伝達される。すなわち、駆動モータ65aによる駆動力が回転軸223を介して当該プーリ224へ伝達されることにより、両フィーダユニット61,62の下ベルト222が同期して動く仕組みになっている。なお、下ベルト222の上に乗っている上ベルト221は、ギア(図示せず)を介して下ベルト222の動きに従動して動く。
【0052】
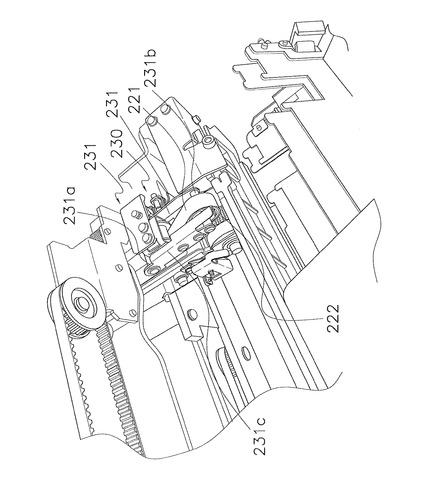
受け取りユニット230は、第1フィーダユニット61の左側部分、すなわち、フィルム送り出し機構5の近傍に配置され、フィルム送り出し機構5から送られるフィルムFを受け取る。受け取りユニット230は、図13に示すように、主として、フレーム231と、フレーム231に取り付けられるプーリ221aとから構成される。
【0053】
フレーム231は、主として、受け取りユニット230が回動する支軸となる軸部材231aと、プーリ221aを支持する軸部材231bと、軸部材231aの長手方向の両側端部から軸部材231bに向かって(すなわち、軸部材231aに対して垂直方向且つフィルム送り出し機構5に向かう方向に)延び、軸部材231a及び軸部材231bを連結するための1対の連結部材231cとから構成される。
【0054】
軸部材231a及び軸部材231bは、前後方向に延びる部材である。
【0055】
プーリ221aは、フレーム231の軸部材231bに支持されることによって、フレーム231に固定されている。プーリ221aには、上述したように、上ベルト221が掛けられる。すなわち、上ベルト221は、プーリ221aを介して受け取りユニット230と一体化される。よって、上ベルト221は、フィルムFを掴む掴み部、そして、当該掴んだフィルムFをフィルム搬送機構6へと導入する導入部、及び、フィルムFを包装ステーション3に搬送するための搬送部としての機能を有している。
【0056】
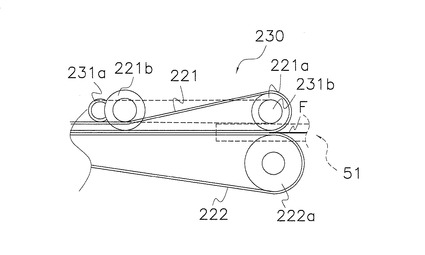
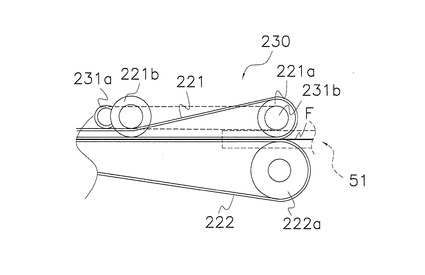
受け取りユニット230は、第1ソレノイド61a(第2フィーダユニット62の受け取りユニット230は、第5ソレノイド62a)の作動/非作動によって、軸部材231aを支軸として回動し、第1姿勢(図25を参照)と第2姿勢(図23を参照)とを採る。第1姿勢は、その長手方向(すなわち、左右方向)が略水平方向となる姿勢である。第2姿勢は、その長手方向が水平面に対して上方に傾斜する姿勢である。
【0057】
受け取りユニット230の第1姿勢においては、プーリ221aに掛けられる上ベルト221の下側のベルトのフィルムFを掴むための掴み部(すなわち、上ベルト221のうちフィルムFの先端を掴む際にフィルムFに接触する部分)(具体的には、掴み部の掴み面(すなわち、上ベルト221のうちフィルムFの先端を掴む際にフィルムFに接触する面))は、フィルムFの上面に接触するフィルム接触状態(図25を参照)を採る。受け取りユニット230の第2姿勢においては、プーリ221aに掛けられる上ベルト221の下側のベルトのフィルムFを掴むための掴み部(具体的には、掴み面)が、フィルムFの上面に接触しないフィルム非接触状態(図23を参照)を採る。
【0058】
より具体的には、受け取りユニット230は、第1ソレノイド61aが作動すると、軸部材231aを支軸としてその先端部が押し下げられて所定の位置まで動く(すなわち、第1姿勢を採る)。これにより、プーリ221aに掛けられる上ベルト221の掴み部(具体的には、掴み面)がフィルム接触状態になる。他方、受け取りユニット230は、第1ソレノイド61aの作動が解除されると、軸部材231aを支軸としてその先端部が押し上げられて所定の位置(第2姿勢)に戻る。これにより、上ベルト221の掴み部(具体的には、掴み面)がフィルム非接触状態になる。
【0059】
従って、第1及び第5ソレノイド61a,62aを作動すれば、上ベルト221の掴み部(具体的には、掴み面)がフィルムFに接触する(具体的には、上ベルト221の掴み部(具体的には、掴み面)と下ベルト222とでフィルムFを挟持する)ことによって、フィルム送り出し機構5から送られるフィルムFを受け取ることができる。すなわち、受け取りユニット230は、制御装置9に制御されることによって、ベルトユニット220を、フィルム送り出し機構5から送られるフィルムFをフィルム搬送機構6に導入する導入部として機能させる役割を有する。
【0060】
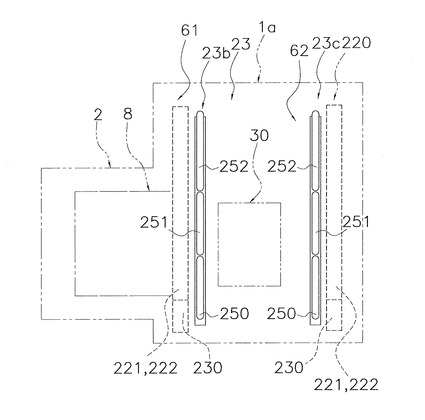
クランプユニット23は、図14に示すように、フィルムFの幅方向(前後方向)においてフィーダユニット61,62の内側に配置される。クランプユニット23は、第1フィーダユニット61の近傍に配置される正面側クランプ23bと、第2フィーダユニット62の近傍に配置される背面側クランプ23cとを有する。
【0061】
正面側及び背面側クランプ23b,23cは、第1サイドクランプ250(右側のクランプ)と、中央クランプ251と、第2サイドクランプ252(左側のクランプ)とを有している。第1サイドクランプ250と中央クランプ251と第2サイドクランプ252とは、平面視において一直線上に並んで配置される。
【0062】
クランプユニット23は、左右方向に延び、フィルムFの幅方向の両側端部を把持する。具体的には、クランプユニット23の下方には、クランプユニット23とともにフィルムFを挟むための樹脂製の帯板23aが配置されている。また、帯板23aは、クランプユニット23と同様に、左右方向に延び、クランプユニット23の長手方向の長さとほぼ同様である。よって、クランプユニット23は、帯板23aとともに、フィルムFを把持する把持部材としての役割を有する。帯板23aは、その上面の高さ位置が下ベルト222の上側のベルトの上面の高さ位置よりも低い位置にある。
【0063】
図16に示すように、クランプユニット23は、各クランプ250,251,252に対応して設けられるソレノイドによって作動する。具体的には、正面側クランプ23bの、第1サイドクランプ250は、第2ソレノイド61bによって、中央クランプ251は、第3ソレノイド61cによって、第2サイドクランプ252は、第4ソレノイド61dによって作動する(背面側クランプ23cの、第1サイドクランプ250は、第6ソレノイド62bによって、中央クランプ251は、第7ソレノイド62cによって、第2サイドクランプ252は、第8ソレノイド62dによって作動する)。
【0064】
クランプユニット23は、ソレノイド61b,61c,61d,62b,62c,62dが作動すると、押し下げられ帯板23aに対して下向きの荷重をかける。よって、クランプユニット23と帯板23aとの間にフィルムFがあるときは、ソレノイド61b,61c,61d,62b,62c,62dを作動すれば、フィルムFがクランプユニット23と帯板23aとの間で密着して把持される。他方、ソレノイド61b,61c,61d,62b,62c,62dの作動を解除すれば、フィルムFの把持が解除される。
【0065】
なお、フィルム搬送機構6のフィルム搬送方向の上流側には、図2や図4に示すように、カッター機構69が設けられている。カッター機構69は、フィルム送り出し機構5からフィルム搬送機構6へと受け渡されたフィルムFがフィルム搬送機構6で所定量搬送された後に、両機構5、6間においてフィルムFを切断するために設けられている。カッター機構69は、フィルムの幅よりも長い切断刃を有しており、当該切断刃をアクチュエータで移動させることによりフィルムFを切断する。
【0066】
(1−6)折り込み機構7
折り込み機構7は、包装ステーション3に搬送されたフィルムFによって、被包装物を包装する機構である。折り込み機構7は、図2や図3に示すように、左右折り込み板76,77と、後折り込み板78と、前折り込み棒79とを有する。
【0067】
左右折り込み板76,77は、フィルムFのフィルムの搬送方向の両端部をトレーTの底面側に折り込む。
【0068】
後折り込み板78は、フィルムFの第2フィーダユニット62側の側部をトレーTの底面側に折り込む。
【0069】
左右折り込み板76,77及び後折り込み板78は、図示しないモータ及びタイミングベルトによって水平移動が可能である。
【0070】
前折り込み棒79は、トレーTの排出時に、フィルムFの第1フィーダユニット61側の側部がトレーTの底面側に折り込まれるように配置されている。トレーTの排出は、排出プッシャー75がトレーTをシール機構8(前面側)に向けて押し出すことによって行われる。
【0071】
(1−7)シール機構8
図15は、シール機構8の平面図である。
【0072】
シール機構8は、排出プッシャー75によって押し出されたトレーTの底面を熱してシールする。なお、このとき、上述の押さえ機構81は、商品Gが収容されたトレーTをシール機構8の上面に押し付ける役割も有している。
【0073】
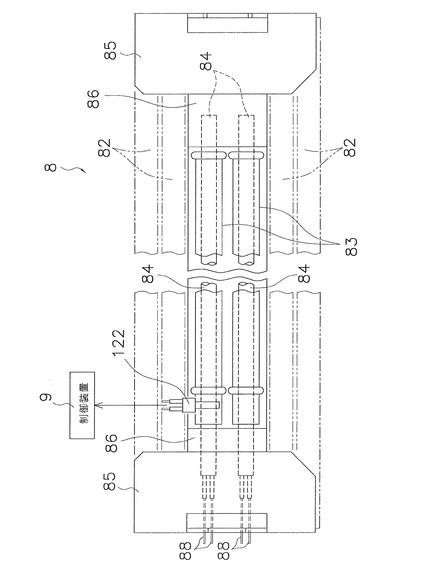
シール機構8は、図15に示すように、主として、搬送ローラ82と、加熱ローラ83と、ヒータ84と、ローラ支持部材85と、ヒータ支持部材86とを有する。
【0074】
搬送ローラ82は、2本の加熱ローラ83の前後に複数本が配置されている。搬送ローラ82は、左右一対のローラ支持部材85は、各ローラ82、83の両端を回転自在に支持している。また、加熱ローラ83は、筒状に形成されており、その内部に円柱状の電気式のヒータ84が挿入されている。ヒータ84は、いわゆるカートリッジヒータであり、加熱ローラ83と接触しておらず、両端がヒータ支持部材86に固定されている。これらのヒータ84の一端には、電極88が設けられており、この電極から通電を行うことによって、ヒータ84内の発熱コイルが発熱する。すなわち、加熱ローラ83は、ヒータ84によって加熱されている。加熱ローラ83がヒータ84によって加熱されることにより、加熱ローラ83を介して排出台11に排出されるトレーTを包装するフィルムFがトレーTの下側で熱シールされる。
【0075】
なお、加熱ローラ83には、その外表面の温度を検出する温度センサ122が接触している。当該温度センサ122は、加熱ローラ83の温度を制御装置9へと送信する。
【0076】
(1−8)排出台11
シール機構8の正面側には、商品Gが収容されたトレーTが完全に包装された状態で排出するための排出台11が設けられている。包装が完了されたトレーTには、ラベル発行機16が、ラベルプリンター15で印字処理されたラベルを貼り付ける。
【0077】
(2)制御装置9
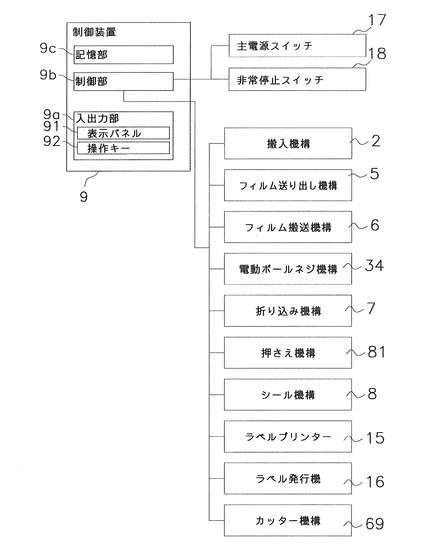
図17は、制御装置9の制御ブロック図である。
【0078】
制御装置9は、図1に示すように、本体1aの上方部分に配置される。制御装置9は、コンピュータから構成され、図17に示すように、本体1aに配置される各機構の動作を制御する制御手段として機能する。
【0079】
制御装置9は、具体的には、主として、入出力部9aと、制御部9bと、記憶部9cとを有する。
【0080】
入出力部9aは、主として、表示パネル91と、操作キー92とから構成される。表示パネル91には、商品Gの名称、重量、価格等が表示される。表示パネル91は、タッチパネル式であり、作業者等の入力を受け付ける入力受付部としての操作ボタンも配される。操作キー92は、キーボードから構成される。
【0081】
制御部9bは、CPU等から構成される。制御部9bは、入出力部9aを介した入力信号、各種のスイッチ(主電源スイッチ17、非常停止スイッチ18(図1も参照))が押されたことによる入力信号、各種のセンサ(例えば、温度センサ122、危険回避センサ(図示せず、本体1a内に商品F及びトレーTが存在する場合に、作業者が所定エリアに入らないようにするためのセンサ))による検知信号を受信して、本体1a内の機構2,5,6,34,7,81,8,15,16,69等の動作の制御等を行う。
【0082】
記憶部9cは、RAMやROM等から構成され、表示パネル91や操作キー92等から入力された入力データや外部の装置から転送された転送データ等が記憶される。なお、入力データや転送データには、フィルムF、トレーT、商品Gのデータ等が含まれる。
【0083】
(3)ストレッチ包装装置1の動作
図18〜図22は、ストレッチ包装装置1の動作を説明するための説明図である。
【0084】
以下、上記のような構成を有するストレッチ包装装置1の動作について図18〜図22を用いて説明する。なお、以下の駆動動作は、制御装置9によって行われるものとする。
【0085】
(3−1)ストレッチ包装装置1の全体の概略動作
まず、図18に示すように作業者が商品Gを収容したトレーTを投入機構2の計量器上に載せると、計量値が安定して計量が完了するのを待って、搬入ベルトが動き出す。この搬入ベルトの動きにしたがって搬入ベルトに固定されている突起が前面側から背面側へと移動する。これにより、計量器上に載せられた商品Gは、リフター機構30の支持部材33上に押し出される(図19を参照)。
【0086】
一方、フィルムロールRからフィルム送り出し機構5によりフィルム搬送機構6へと受け渡されたフィルムFは、第1フィーダユニット61及び第2フィーダユニット62によってリフター機構30の上方まで運ばれる。そして、リフター機構30の上方において、各クランプ250〜252の作動によりフィルムFの幅方向の両側部が保持された状態となっている。
【0087】
そして、各クランプ250〜252により保持されたフィルムFに対して、ボールネジ機構34が、リフター機構30に載っている商品G及びトレーTを押し付ける(図20を参照)。これにより、各クランプ250〜252により保持されたフィルムFは、商品G及びトレーTの上部を覆うように伸張する。
【0088】
この状態において、後折り込み板78及び左右折り込み板76,77がトレーTの下側に水平移動すると、適当なタイミングで正面側クランプ23bの中央クランプ251以外のクランプがフィルムFの保持を解除して、フィルムFの周囲3辺がトレーTの下側に折り込まれる(図21を参照)。そして、排出プッシャー79aがトレーTをシール機構8側に押し出すと、折り込まれていなかった正面側のフィルムFの1辺が前折り込み棒79に当たり、シール機構8側へのトレーTの移動に従ってトレーTの下側に折り込まれていく。なお、正面側クランプ23bの中央クランプ251は、このときにフィルムFの保持が解除される。また、この移動中に、トレーTの下側に折り込まれたフィルムFが加熱ローラ83によって熱シールされ、図22に示す位置に排出されたとき(排出台11に排出されたとき)には、商品G及びトレーT全体をフィルムFが覆った包装完了の状態となる。
【0089】
さらに、計量値に基づいて算出される商品の値段や重量等がラベルプリンター15によりラベルに印字される。そして、当該ラベルが、ラベル発行機16により包装が完了されたトレーTに貼り付けされる。
【0090】
(3−2)フィルムFの搬送
図23〜図27は、フィルムFの搬送を示すための説明図である。図28は、第1及び第2フィーダユニット61,62の動作説明図である。以下、図23〜図28を用いてフィルムFの搬送について説明する。
【0091】
まず、作業者によって、フィルムロールRがロールバーにセットされる。そして、作業者によって、フィルムロールRに巻かれているフィルムFの先端が、差し込み板ユニット51に引っ掛けられる。このとき、作業者は、フィルムFの先端を、差し込み板ユニット51の正面側に形成される切り欠き53aにのみ引っ掛ける(図5を参照)。
【0092】
この状態において、フィルムロール駆動モータ4dを駆動すると、ベルト4cを介して1のフィルムロールRが回転する。これにより、フィルムロールRからフィルムFが繰り出される。そして、このとき、フィルム送り出し機構5の差し込み板ユニット51は、板部材にフィルムFを挟んだ状態で第1位置又は第2位置を採る。
【0093】
また、このとき、フィルム搬送機構6の第1フィーダユニット61及び第2フィーダユニット62の各受け取りユニット230は第2姿勢を採る(図23を参照)。すなわち、フィルムFを掴むために、上ベルト221の掴み部(具体的には、掴み面)が下ベルト222に接触していない状態となっている。
【0094】
次に、差し込み板ユニット51は、フィルムFをフィルム搬送機構6に受け渡すために、フィルム差し込み板駆動モータによってフィルム搬送機構6側に水平に移動する(図24を参照)。このとき、差し込み板ユニット51は、切り欠き部分にあるフィルムFがフィルム搬送機構6に受け渡されるように、所定位置まで移動する。具体的には、フィルム差し込み板ユニット51は、フィルムFが下ベルト221の上側のベルトの上面に接触するまで移動する(図5や図24を参照)。なお、フィルム差し込み板ユニット51が第1位置又は第2位置を採る状態において、フィルムを送り出すほうの差し込み板ユニットの下側に位置する板部材の上面と、下ベルト221の上側ベルトの上面との高さ位置は略同じである、すなわち、差し込み板ユニット51に保持されるフィルムFの高さ位置と下ベルト221の上側ベルトの上面との高さ位置は略同じである。これにより、フィルムFは、フィルム送り出し機構5からフィルム搬送機構6へ受け渡されやすくなる。なお、フィルム送り出し機構5から送られるフィルムFは、空間Sに入るようになっている(図11を参照)。
【0095】
次に、フィルムFが所定位置までくると、フィルム搬送機構6は、フィルムFの先端を掴む。具体的には、フィルムFが所定位置までくると、第1ソレノイド61a,第5ソレノイド62aの作動により、第1フィーダユニット61及び第2フィーダユニット62の受け取りユニット230が軸部材231aを支軸として回動されて、第1姿勢を採る。そして、上ベルト221の下側ベルトの下面をフィルムFに接触させる(すなわち、上ベルト221の掴み部(具体的には、掴み面)をフィルム接触状態とする)(図25を参照)。これにより、フィルムFは、上ベルト221と下ベルト222とにより挟持される。
【0096】
なお、第1フィーダユニット61は、ベルトユニット220の幅方向の位置が板部材に形成される切り欠き53aの幅方向の位置と略同じ位置になるように決定されており、フィルムFが所定位置まできたときは、当該位置に位置する。一方、このとき、第2フィーダユニット62は、第1フィーダユニット61の背面側に位置している(図28を参照)。
【0097】
そして、上ベルト221と下ベルト222とでフィルムFの先端が挟まれると、図26に示すように、フィーダ駆動ユニット65の駆動によりフィルムFが包装ステーション3側(図26においては、紙面を手前側から視て左側)に搬送される。具体的には、フィーダ駆動ユニット65を駆動することにより、第1フィーダユニット61及び第2フィーダユニット62の下ベルト222がフィルムFが包装ステーション3側に搬送されるように動き、上ベルト221もフィルムFが同方向に搬送されるように動く。すなわち、上ベルト221及び下ベルト222が動くことにより、これらに挟まれるフィルムFを包装ステーション3側へ搬送している。
【0098】
ここで、フィルムFの右側への搬送を行う際、第1フィーダユニット61の近傍に一致していた第2フィーダユニット62は、第2フィーダ移動ユニット64の作動により、フィルムFを挟持しながら背面側に移動していく(図28を参照)。これにより、フィルム搬送が進むにつれて、第1及び第2フィーダユニット61,62がフィルムFを広げた状態で保持できるようになる。
【0099】
なお、フィルムFがフィルム搬送方向に搬送され始めると、フィルム差し込み板ユニット51は、元の位置まで戻る(図23を参照)。そして、フィルムFは、包装ステーション3の中央部分まで搬送される。なお、フィルムFがフィルム搬送方向に所定量搬送されると、カッター機構69によってフィルムFが切断される(図27を参照)。
【0100】
(3−3)フィルムFの引き伸ばし動作
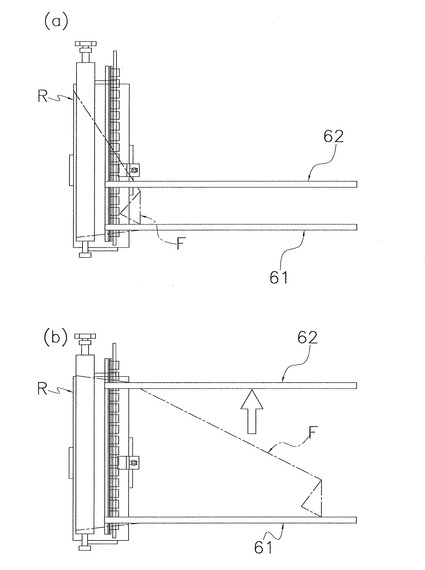
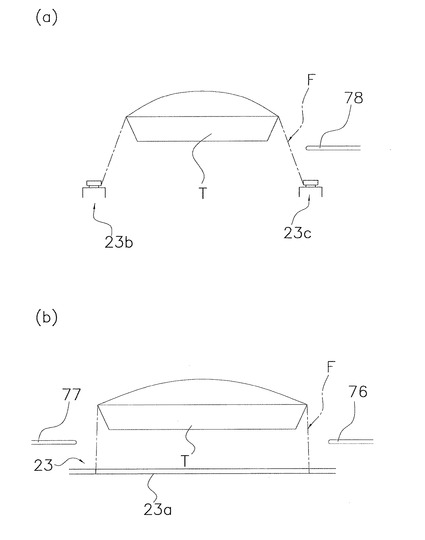
図29は、リフター機構30(図29には図示せず)によってトレーTが後折り込み板78及び左右折り込み板76,77よりも上方に持ち上げられたときの状態を示している。図29(a)は、側面から、図29(b)は、正面から視たときの状態を表す。
【0101】
まず、図19に示す状態、すなわち、図20や図29(a)(b)に示す前の状態においては、フィルムFが引き伸ばされるフィルム引き伸ばし動作が行われる。フィルム引き伸ばし動作は、フィルム搬送機構6によりリフター機構30の上方まで運ばれてきたフィルムFが、各クランプ250〜252(正面側クランプ23b及び背面側クランプ23c)によって把持されるフィルム把持状態で行われる。具体的には、フィルム引き伸ばし動作は、フィルムFが、各クランプ250〜252と帯板23aによってその幅方向の両側部を挟まれたフィルム把持状態で行われる。そして、引き伸ばし動作では、各クランプ250〜252と帯板23aとによるフィルム把持状態において、第1フィーダユニット61及び第2フィーダユニット62がフィルムFの幅方向に離反するように移動することによって、フィルムFが幅方向の外側に引き伸ばされる。なお、このときのフィルムFの引き伸ばし量は、作業者等によって決められた任意の値であり、制御装置9の記憶部9cに予め記憶されている。
【0102】
フィルム引き伸ばし動作では、フィルムFが伸張し緊張保持される。フィルムFの引き伸ばし動作において(すなわち、各クランプ250〜252がフィルム把持状態を採るとき)、上ベルト221のフィルムFの掴み部(具体的には、掴み面)はフィルム接触状態となっている。なお、このとき、例えば、受け取りユニット230を第1及び第5ソレノイド61a,62aによって作動させることにより、第1姿勢よりも下ベルト222側の姿勢(第3姿勢)を採らせたとする。このとき、上ベルト221をクランプユニット23とは別の補助的なクランプとして機能させることができる。
【0103】
なお、フィーダ駆動ユニット65の駆動モータ65aには、DCブラッシュレスモータが使用されている。当該DCブラッシュレスモータには位置を検出できるエンコーダが取り付けられており、所定位置を原点位置としてフィーダユニット61,62の位置を検出できる。ここで、フィーダユニットは、上述のような引き伸ばし動作等を行うために前後方向に移動するので、エンコーダにより検出された検出位置と、第1及び第2フィーダユニットが実際に存在する位置とに誤差が生じることが懸念される。
【0104】
そこで、本体1a内に配置される危険回避センサを用いて、当該危険回避センサが配置される位置を原点位置として、当該原点位置をフィーダユニット61,62が通る場合には、今までカウントしたデータをキャンセルして、その時点からカウントを開始している。これにより、フィーダユニット61,62の実際の位置を精度よく検出できる。
【0105】
(3−4)フィルムFの折り込み動作
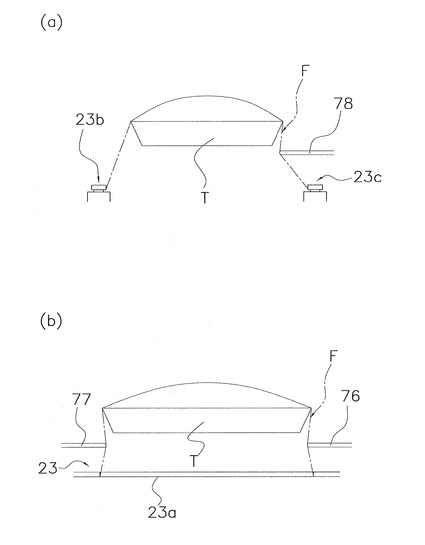
図30〜図32は、フィルムFの折り込み動作の説明図である。
【0106】
この図30に示す状態までトレーTが持ち上げられると、後折り込み板78及び左右折り込み板76,77がトレーTの下方の空間に向かって水平移動してくる。そして、図30に示すように、後折り込み板78及び左右折り込み板76,77がフィルムFを側方から押し始める。
【0107】
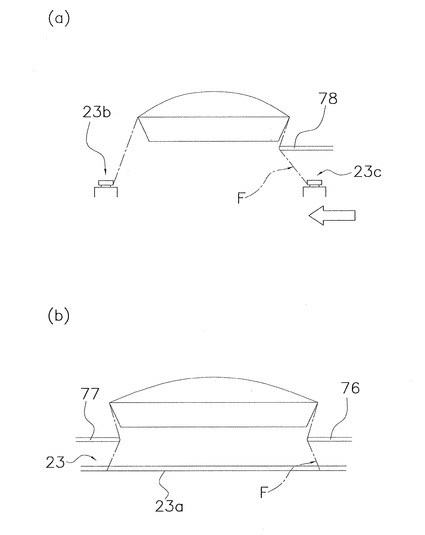
そして、さらに後折り込み板78及び左右折り込み板76,77が移動して、それらの先端がある程度トレーTの下方に入ってくると、図31に示すように、第2フィーダ移動ユニット64の駆動モータ64aが作動して、第2フィーダユニット62(図31の背面側クランプ23cを含むもの)がフィルムFの幅方向の内側に寄ってくる。
【0108】
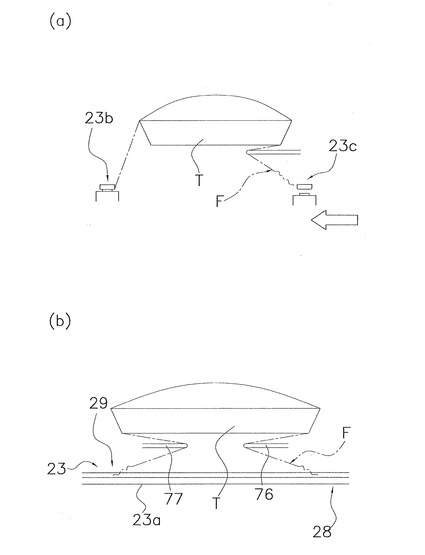
そして、所定の位置まで後折り込み板78及び左右折り込み板76,77が進むと、順次クランプ250〜252のフィルムFへの保持が解除される(図32を参照)。なお、このとき、フィルムFの引き伸ばし動作においてフィルムFの補助クランプとして機能していた上ベルト221のフィルム接触状態も解除される。すなわち、上ベルト221は、受け取りユニット230の駆動により、第1及び第2サイドクランプ250,252と同様の動きをする。
【0109】
この後、さらに後折り込み板78及び左右折り込み板76,77が移動して、正面側を除くフィルムFの周囲3辺がトレーTの下側に折り込まれていく。このときには、正面側クランプ23bの中央クランプ251を除いては、各クランプがフィルムFの保持を解除した状態となっている。
【0110】
そして、上述のように、排出プッシャー79aでトレーTをシール機構8側に押すと折り込まれていなかった正面側のフィルムFの1辺が前折り込み棒79に当たり、シール機構8側へのトレーTの移動に従って、トレーTの下側に折り込まれていく。このときに、正面側クランプ23bの中央クランプ251によるフィルムFの保持が解除される。
【0111】
(4)特徴
(4−1)
本実施形態では、フィルム搬送機構6のフィーダユニット61,62によって包装ステーション3の中央部分に搬送されたフィルムFに商品G及びトレーTを押し付けることでこれらをフィルムFで包装する。
【0112】
フィルム搬送機構6が、フィルム送り出し機構5によって受け渡されたフィルムFの先端を掴んで、すなわち、フィルム送り出し機構5によって受け渡されたフィルムFをフィルム搬送機構6に導入して、フィルムFを包装ステーションまで搬送する。
【0113】
具体的には、フィルムFの両面に接触してフィルムFを搬送する搬送部材であるベルトユニット220の、フィルムFを包装ステーション3まで搬送する第1搬送部として機能する上ベルト221のフィルムFの上面に接触する掴み部(具体的には、掴み面)が、状態を変更されることでフィルム搬送機構6がフィルムFを掴んでいる。状態の変更とは、フィルムFに接触する状態とフィルムに接触しない状態との変更である。なお、ベルトユニット220の下ベルト222は、フィルムFを包装ステーション3まで搬送する第2搬送部として機能する。下ベルト222は、フィルムFの下面に接触する上面を有する。
【0114】
上ベルト221の下面のフィルム非接触状態からフィルム接触状態への変更は、制御装置9(具体的には、制御部9b)が、上ベルト221の状態を変更させる状態変更部材として機能する受け取りユニット230を制御することによって行う。
【0115】
また、フィルム搬送機構6は、フィルムFの引き伸ばし動作、及び/又は、フィルムFの折り込み動作において、フィルムFを把持するフィルム把持状態を採るクランプユニット23を有している。具体的には、クランプユニット23は、その下方に配置される帯板23aとともにフィルムFを把持する。
【0116】
本実施形態では、受け取りユニット230を制御することで、上ベルト221の掴み部(具体的には、掴み面)をフィルムFの先端に接触させることができる。すなわち、上ベルト221でフィルムFの先端を掴み、フィルム搬送機構6へ導入することができる。すなわち、上ベルト221を、フィルムFを掴むためのものとして機能させることができる。これにより、フィルムFを掴むための部材等を別途たくさん配置しなくてもよいので、省スペース化を図ることができる。
【0117】
(4−2)
本実施形態では、制御部9bは、クランプユニット23がフィルム把持状態を採るときに、受け取りユニット230を制御することによって上ベルト221の掴み部(具体的には、掴み面)をフィルム接触状態にできる。このとき、受け取りユニット230が制御されることで、上ベルト221によってフィルムF(下ベルト222)に対してより荷重がかかるようにすれば(すなわち、受け取りユニット230を第3姿勢にすれば)、上ベルト221を下ベルト222とともに、クランプユニット23とは別の補助的なクランプとして機能させることができる。なお、補助的なクランプとしての機能は、フィルムFの引き伸ばし動作や折り込み動作においてより有効になる。
【0118】
また、受け取りユニット230を制御することで、上ベルト222をクランプとして機能させる場合は、クランプユニット230の長手方向の長さを短くすることもできる。
【0119】
(4−3)
受け取りユニット230は、所定軸を支軸として回動可能である。具体的には、受け取りユニット230は、制御部9bによって、軸部材231aを支軸として回動する。より具体的には、制御部9bによって各ソレノイドが作動されることにより、受け取りユニット230は、第1姿勢と第2姿勢とが切り替えられる。これにより、簡易にフィルムFを掴むことができる。
【0120】
(4−4)
受け取りユニット230は、第1姿勢の状態において、その長手方向が略水平方向となるように配置される。これにより、平面視においてベルトユニット220の延長線上に受け取りユニット230を配置することができる。よって、省スペース化が可能になる。
【0121】
(4−5)
受け取りユニット230の一部には、搬送ベルトとしての上ベルト221が掛けられる。これにより、上ベルト221を受け取りユニット230と一体化させることができる。すなわち、上ベルト221が受け取りユニット230の機能を有するので、省スペース化を図れる。
【0122】
(5)変形例
以上、本発明の実施形態について図面に基づいて説明したが、具体的な構成は、上記の実施形態に限られるものではなく、発明の要旨を逸脱しない範囲で変更可能である。
【0123】
(5−1)変形例1A
上記実施形態では、受け取りユニット230は、上ベルト221の掴み部(具体的には、掴み面)がフィルムFの先端を掴んでからフィルムFの折り込み動作までは、第1姿勢を採ると説明し、また、フィルムFの折り込み動作において、受け取りユニット230は、第1及び第2サイドクランプ250,252と同様の動きをすると説明したがこれに限られるものではない。例えば、受け取りユニット230は、上ベルト221の掴み部(具体的には、掴み面)がフィルムFの先端を掴んだ後すぐに第1姿勢から第2姿勢に変更されてもよい。そして、次のフィルムFを掴むまでは、第2姿勢を採っていてもよい。
【0124】
なお、この場合、フィルムFの引き伸ばし動作や折り込み動作において受け取りユニット230を第1姿勢にしたい場合は、再度制御装置9が制御すればよい。
【0125】
(5−2)変形例1B
上記実施形態では、上ベルト221と下ベルト222とでフィルムFの先端を掴むと説明したが、これに限られるものではない。例えば、電気的機構等を用いることでフィルムFを掴むことができる場合、搬送部材である上ベルト221の掴み部のみがフィルムFに接触しないフィルム非接触状態からフィルムFに接触するフィルム接触状態へ変更することで、フィルム搬送機構6がフィルムFを掴んでもよい。この場合であっても、上ベルト221の掴み部がフィルムFを掴むことができるので、上述と同様の効果を奏する。また、例えば、搬送部材が、ベルトと、フィルムFを掴むことが可能な掴み部との組み合わせである場合も、掴み部がフィルムFを掴めるので、上述と同様の効果を奏する。
【産業上の利用可能性】
【0126】
本発明は、包装装置、特に、緊張保持させたフィルムに被包装物を押し付けるストレッチ機能を有する包装装置に種々適用可能である。
【符号の説明】
【0127】
1 包装装置
3 包装ステーション(包装部)
6 フィルム搬送機構(搬送機構)
9 制御装置
9b 制御部
23 クランプユニット(把持部材)
221 上ベルト(搬送部材、第1搬送部)
222 下ベルト(第2搬送部)
230 受け取りユニット(搬送部材状態変更部材)
231a 軸部材
F フィルム
G 商品(被包装物)
T トレー(被包装物)
【先行技術文献】
【特許文献】
【0128】
【特許文献1】特開平9−12004号公報
【技術分野】
【0001】
本発明は、ストレッチ包装装置に関する。
【背景技術】
【0002】
生鮮食料品などの被包装物を包装する装置として、ストレッチ包装装置が知られている。ストレッチ包装装置には、例えば、特許文献1(特開平9−12004号公報)に開示のように、包装部においてプリストレッチがされた状態のフィルムに対して被包装物を押し上げ、その状態で、フィルムを被包装物の下側に折り込んで包装するものがある。当該文献に記載のストレッチ包装装置では、フィルムロールから繰り出されたフィルムは、フィルムフィード手段によって、包装部に搬送されている。
【発明の概要】
【発明が解決しようとする課題】
【0003】
ここで、ストレッチ包装装置は、例えば、スーパー等の店舗のバックヤードに設置される。店舗のバックヤードでは、さまざまな作業が行われているため、ストレッチ包装装置はコンパクト化されることが望ましい。
【0004】
そこで、本発明の課題は、省スペース化を図ることができるストレッチ包装装置を提供することにある。
【課題を解決するための手段】
【0005】
本発明に係るストレッチ包装装置は、包装部と、搬送機構と、制御部とを備える。包装部は、緊張保持させたフィルムに対して被包装物を押し付けることによって被包装物を包装する。搬送機構は、包装部にフィルムを搬送する。制御部は、搬送機構の駆動を制御する。また、搬送機構は、搬送部材と、搬送部材状態変更部材と、把持部材とを有する。搬送部材は、フィルムを包装部に移動させる。搬送部材状態変更部材は、少なくともフィルムの先端を掴むために、搬送部材の掴み部をフィルム非接触状態からフィルム接触状態に変更する。フィルム非接触状態とは、フィルムに接触していない状態である。フィルム接触状態とは、フィルムに接触する状態である。把持部材は、フィルムの引き伸ばし動作、及び/又は、フィルムの折り込み動作においてフィルム把持状態を採る。フィルム把持状態とは、フィルムを把持する状態である。制御部は、把持部材がフィルム把持状態を採るときに、搬送部材状態変更部材を制御することによって搬送部材の掴み部をフィルム接触状態にできる。
【0006】
ここでは、搬送部材状態変更部材を制御することで搬送部材の掴み部をフィルム接触状態にすることができる。よって、搬送部材を用いてフィルムを掴むことができる。すなわち、搬送部材を、フィルムを掴むためのものとして機能させることができる。これにより、別途、フィルムを掴むためのものをたくさん配置しなくてもよいので、省スペース化を図ることができる。
【0007】
別の本発明に係るストレッチ包装装置は、包装部と、搬送機構と、制御部とを備える。包装部は、緊張保持させたフィルムに対して被包装物を押し付けることによって被包装物を包装する。搬送機構は、包装部にフィルムを搬送する。制御部は、搬送機構の駆動を制御する。搬送機構は、搬送部材と、搬送部材状態変更部材と、把持部材とを有する。搬送部材は、フィルムの両面に接触してフィルムを包装部に移動させる。また、搬送部材は、第1搬送部と第2搬送部とを含む。第1搬送部は、フィルムの一方の面に接触する。第2搬送部は、フィルムの他方の面に接触する。搬送部材状態変更部材は、少なくともフィルムの先端を掴むために、第1搬送部のフィルムの一方の面に接触する掴み面を、フィルム非接触状態からフィルム接触状態に変更する。フィルム非接触状態とは、フィルムに接触していない状態である。フィルム接触状態とは、フィルムに接触する状態である。把持部材は、フィルムの引き伸ばし動作、及び/又は、フィルムの折り込み動作においてフィルム把持状態を採る。フィルム把持状態とは、フィルムを把持する状態である。制御部は、把持部材がフィルム把持状態を採るときに、搬送部材状態変更部材を制御することによって掴み面をフィルム接触状態にできる。
【0008】
ここでは、搬送部材状態変更部材を制御することで第1搬送部の掴み面をフィルム接触状態にすることができる。よって、搬送部材を用いてフィルムを掴むことができる。すなわち、搬送部材を、フィルムを掴むためのものとして機能させることができる。これにより、別途、フィルムを掴むためのものをたくさん配置しなくてもよいので、省スペース化を図ることができる。
【0009】
また、制御部は、引き伸ばし動作において把持部材がフィルム把持状態を採るときに、搬送部材状態変更部材を制御することによって搬送部材の掴み部を前記フィルム接触状態とすることが好ましい。引き伸ばし動作において、搬送部の掴み部をフィルム接触状態とすることで、搬送部の掴み部がフィルムに対して荷重をかけることが可能になる。よって、搬送部材の掴み部を把持部材として機能させることが可能になる。
【0010】
また、搬送状態変更部材は、所定軸を支軸として回動可能であることが好ましく、制御部は、搬送部材状態変更部材を制御することによって、搬送部材の掴み部を所定軸を支軸として回動させることが好ましい。これにより、簡易にフィルムを掴むことができる。
【0011】
また、搬送部材状態変更部材は、フィルム接触状態において、その長手方向が略水平方向となるように配置される好ましい。
【0012】
また、搬送部材は、搬送ベルトであり、搬送部材状態変更部材の一部には、搬送ベルトが掛けられることが好ましい。
【発明の効果】
【0013】
本発明に係るストレッチ包装装置では、省スペース化を図ることができる。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施形態であるストレッチ包装装置の外観斜視図。
【図2】ストレッチ包装装置の内部の正面概略図(フィルム差し込み板ユニットが第1位置を採る場合)。
【図3】図2のIII−IIIの矢視斜視図。
【図4】ストレッチ包装装置の内部の正面概略図(フィルム差し込み板ユニットが第2位置を採る場合)。
【図5】フィルム差し込み板ユニットの概略平面図。
【図6】ストレッチ包装装置の内部の平面概略図。
【図7】フィーダユニット及びフィーダ駆動ユニットの相関図。
【図8】第1フィーダユニットの正面図。
【図9】第1フィーダユニットの斜視図。
【図10】ベルトユニットの着目図。
【図11】第1フィーダユニットの側面図。
【図12】第1及び第2フィーダユニットの一部の概略斜視図。
【図13】受け取りユニットの概略斜視図。
【図14】クランプユニットを含んだフィーダユニットの平面図。
【図15】シール機構の平面図。
【図16】制御装置とフィルム搬送機構との結線図
【図17】制御装置の制御ブロック図。
【図18】ストレッチ包装装置の動作説明図。
【図19】ストレッチ包装装置の動作説明図。
【図20】ストレッチ包装装置の動作説明図。
【図21】ストレッチ包装装置の動作説明図。
【図22】ストレッチ包装装置の動作説明図。
【図23】フィルム搬送の説明図。
【図24】フィルム搬送の説明図。
【図25】フィルム搬送の説明図。
【図26】フィルム搬送の説明図。
【図27】フィルム搬送の説明図。
【図28】第1及び第2フィーダユニットの動作説明図。
【図29】フィルムの折り込み動作の説明図。
【図30】フィルムの折り込み動作の説明図。
【図31】フィルムの折り込み動作の説明図。
【図32】フィルムの折り込み動作の説明図。
【発明を実施するための形態】
【0015】
以下、図面を参照しながら、本発明の一実施形態に係るストレッチ包装装置1について説明する。
【0016】
(1)ストレッチ包装装置1
図1は、ストレッチ包装装置1の外観斜視図である。図2は、ストレッチ包装装置1の内部の正面概略図である(フィルム差し込み板ユニット51が第1位置を採る場合)。図3は、図2のIII−IIIの矢視斜視図である。図4は、ストレッチ包装装置1の内部の正面概略図である(フィルム差し込み板ユニット51が第2位置を採る場合)図5は、フィルム差し込み板ユニット51の概略側面図である。図6は、ストレッチ包装装置1の内部の平面概略図である。図7は、フィーダユニット61,62及びフィーダ移動ユニット63,64の相関図である。
【0017】
以下の説明において、前後左右、上下、正面、背面といった方向を示す言葉を用いるが、当該方向は、特にことわりのない限り、図1の右下に示す方向を意味するものとする。
【0018】
まず、ストレッチ包装装置1について簡略に説明する。ストレッチ包装装置1は、緊張保持させたストレッチフィルムF(図2等を参照)に対して、生鮮食品等の商品G(図3等を参照)を収容したトレーT(図3等を参照)(これらは、被包装物に相当)を押し上げ、フィルムFの周辺部をトレーTの下側に折り込むことによってトレーTのフィルム包装を行う装置である。ストレッチ包装装置1は、フィルム包装機能に加えて、計量機能やラベル貼り付けによる値付け機能も兼ねている。なお、商品GがトレーTに収容されない状態で包装される場合もある。
【0019】
以下、ストレッチ包装装置1の構成について、図1〜図7を用いて説明する。
【0020】
ストレッチ包装装置1は、投入機構2と、包装ステーション3と、ロール支持機構4と、フィルム送り出し機構5と、フィルム搬送機構6と、折り込み機構7と、シール機構8と、排出台11とを備えている。
【0021】
(1−1)投入機構2
投入機構2は、本体1aの正面中央部に設けられており、商品Gを収容したトレーTが本体1a内へ投入される投入部として機能する。投入機構2は、トレーTに収容された商品Gの重量を計量する計量器と、計量器上に載置される計量皿と、一対のローラ間に建設された複数の搬入ベルトとを有している。搬入ベルトには、搬送用の突起が設けられており、商品Gを収容したトレーTを、図3に示すように計量器上(計量皿上)に載置すれば、商品Gの重量が計量器により計量された後、トレーTが正面側から搬入ベルトに固定された突起に押されて、包装ステーション3のリフター機構30(後述する)の支持部材33上に送られる。
【0022】
ここで、突起を正面側から背面側へと駆動する駆動モータには、DCブラッシュレスモータを使用している。当該DCブラッシュレスモータは、加減速が調整可能なモータであり、エンコーダが取り付けられている。
【0023】
なお、投入機構2により計量された商品Gの重量に基づいて、制御装置9(後述する)が商品Gの価格の算出している。
【0024】
(1−2)包装ステーション3
包装ステーション3は、本体1a内に形成される包装空間であって、投入機構2に隣接する。包装ステーション3は、計量が終わった商品Gを含んだトレーTに一連のフィルム包装を行う包装部としての役割を有する。この包装ステーション3では、フィルム搬送機構6によってストレッチフィルムFが張られ、張られたストレッチフィルムFに対して、リフター機構30が商品Gが収容されたトレーTを押し付ける(図20を参照)。そして、折り込み機構7がストレッチフィルムFを押し付けた状態のトレーTの下側へとストレッチフィルムFの周囲の部分を折り込むことによって、トレーT及び商品GがストレッチフィルムFで覆われた状態となる。
【0025】
この包装ステーション3の下部には、リフター機構30が設けられている。リフター機構30は、トレーTの底面を保持してトレーT及び商品Gを上下に昇降する昇降機構として機能する。
【0026】
リフター機構30は、図3に示すように、支持ベース31と、支持ベース31上に固定された複数の支持バー32と、各支持バー32の上端部にそれぞれ回動自在に支持されトレーTの底面を受ける支持部材33とを有している。また、リフター機構30の下部には、支持ベース31を上下移動させる電動ボールネジ機構34が配置される。
【0027】
なお、各支持バー32は、その中央部分に前後左右に折れ曲がるヒンジを備えており、当該ヒンジは、左右折り込み板76,77(後述する、図2や図3を参照)や後折り込み板78(後述する)がトレーTの下部に入ってくるときに一時的に転倒するように構成されている。
【0028】
また、包装ステーション3の上部には、押さえ機構81が配置されている。押さえ機構81は、電動ボールネジ機構34によって、リフター機構30に載っている商品G及びトレーTが突き上げられてとまったときにトレーTや商品Gが姿勢を崩して転倒することを抑える。
【0029】
(1−3)ロール支持機構4
ロール支持機構4は、フィルムロールRを支持する機構であり、図2に示すように、本体1aの側部(具体的には、左側部)に配置されている。ロール支持機構4は、主として、2つのロールバー(図示せず)から構成されている。ロールバーは、フィルムロールRを挿通させ、ホルダー等でフィルムロールRを保持する。ロールバーは、本体1aに回転自在となるように支持されている。ロールバーの一端には、プーリ4bが固定されており、プーリ4bには、ベルト4cが掛けられている。2つのロールバーは、互いに上下左右方向にずれるように配置されている。
【0030】
ベルト4cは、1つのフィルムロール駆動モータ4dによって駆動される。フィルムロール駆動モータ4dは、正逆回転が可能であり、正回転時に一方のロールバーに挿通されるフィルムロールRが回転されるように、他方、逆回転時に、他方のロールバーに挿通されるフィルムロールRが回転されるように駆動する。ベルト4cとフィルムロール駆動モータ4dとの間には、ワンウェイクラッチ4eが設けられている。
【0031】
(1−4)フィルム送り出し機構5
フィルム送り出し機構5は、フィルムロールRから引き出されたフィルムFを、フィルム搬送機構6(具体的には、後述する一対のフィーダユニット61,62)に送り出す(受け渡す)ための機構である。フィルム送り出し機構5は、図2や図5に示すように、主として、フィルムFを保持するためのフィルム差し込み板ユニット51と、フィルム差し込み板ユニット51を、所定軸を支点として回動させるフィルム差し込み板駆動モータ(図示せず)とから構成されている。
【0032】
フィルム差し込み板ユニット51は、主として2枚の板部材57a,58aから構成される第1フィルム差し込み板51aと、主として2枚の板部材57b,58bから構成される第2フィルム差し込み板51bとを有する。
【0033】
フィルム差し込み板ユニット51は、フィルムロールRの上方に配置されており、フィルムロールRの長手方向に沿って延びている。なお、フィルム差し込み板ユニット51の長手方向の長さは、フィルムロールRの長手方向の長さよりも長い。
【0034】
2枚の板部材57a,58a、57b,58bには、それぞれ、切り欠き53a〜53iが形成されている(なお、図5では、板部材57a,58aのみを図示しているが、板部材57b,58bについても同様の構成である)。切り欠き53aと、切り欠き53b〜53iとの距離は、それぞれ、異なるフィルム幅の数種類のフィルムFに対応した距離となっている。例えば、切り欠き53aの外側と切り欠き53iの外側との距離は、最もフィルム幅が大きいフィルムFのフィルム幅に概ね一致している。
【0035】
2枚の板部材57a,58a、57b,58bは、それぞれ、一端が図示しないヒンジで連結されており、開閉が可能である。これにより、作業者は、フィルムFを、板部材57aと板部材58aとの間、板部材57bと板部材58bとの間に簡易に差し込むことができる。板部材57aと板部材58aとは、図5に示すように、略同形状である。板部材57bと板部材58bとも同様に、略同形状である。
【0036】
フィルム差し込み板駆動モータは、フィルム差し込み板ユニット51を、ヒンジ部分を軸として所定の範囲内で回動させる。フィルム差し込み板駆動モータによって、フィルム差し込み板ユニット51は、例えば、第1位置(図2の一点鎖線で示す位置)と、第1位置よりも下方に位置する第2位置(図4の二点鎖線で示す位置)とを採ることができる。具体的には、第1位置は、第2フィルム差し込み板51bがその長手方向が略水平方向に延びるような位置(後述するベルトユニット220と略平行になる位置)である。第2位置は、第1フィルム差し込み板51aが、その長手方向が略水平方向に延びるような位置(ベルトユニット220と略平行となる位置)である。
【0037】
なお、フィルム差し込み板ユニット51は、ストレッチ包装装置1が稼動している間は、第1位置及び第2位置のいずれかに位置する。フィルム差し込み板ユニット51の位置の選択は、2つ配置されるフィルムロールRのいずれを使用するかによって決定し、後述する制御装置9を介して作業者等が行う。より具体的には、フィルム差し込み板ユニット51は、上方に位置するフィルムロールRが選択される場合は、第1位置を採り、下方に位置するフィルムロールRが選択される場合は、第2位置を採る。
【0038】
また、フィルム差し込み板駆動モータは、フィルム差し込み板ユニット51を、フィルム搬送機構6側に水平に移動させる。これにより、フィルム搬送機構5は、フィルム搬送機構6にロール支持機構4で保持するフィルムFを受け渡すことができる。動作については、後に詳述する。
【0039】
(1−5)フィルム搬送機構6
フィルム搬送機構6は、フィルム送り出し機構5から送られるフィルムFを受け取り、当該フィルムFを包装ステーション3の中央部分へと搬送する。フィルム搬送機構6は、フィルムFを包装ステーション3へと搬送した後、後述する引き伸ばし動作を行うことでフィルムFを緊張保持する。
【0040】
フィルム搬送機構6は、主として、第1フィーダユニット61と、第2フィーダユニット62と、第1フィーダ移動ユニット63と、第2フィーダ移動ユニット64と、フィーダ駆動ユニット65とを有する。
【0041】
図6に示すように、第1フィーダユニット61は、本体1aの正面側部分に配置されている。第2フィーダユニット62は、本体1aの背面側部分に配置されている。
【0042】
第1フィーダユニット61及び第2フィーダユニット62は、フィルム差し込み板ユニット51によって保持されるフィルムFの幅方向の両側部(すなわち、正面側部分及び背面側部分)を上下のベルト(後述する上ベルト221及び下ベルト222)で挟み、フィーダ駆動ユニット65によってフィルムFを矢印A1(図2を参照)に示す方向へと搬送する。
【0043】
また、第1フィーダユニット61は、第1移動フィーダユニット63の作動により、第2フィーダユニット62は、第2移動フィーダユニット64の作動により、それぞれフィルムFの幅方向に移動するように構成されている。それぞれのフィーダユニット61,62は、フィルムFの幅方向に沿って伸びるスライドシャフト66,67によって、2箇所でフィルムFの幅方向に移動自在にされている。
【0044】
図7に示すように、各フィーダ移動ユニット63,64は、駆動モータ63a,64aと、当該駆動モータ63a,64aの作動によりフィルムFの幅両方向に移動するベルト63b,64bとを有している。そして、各フィーダユニット61,62が各ベルト63b,64bの作動でフィーダユニット61,62がそれぞれ別個にフィルムFの移動を行い得るようになっている。
【0045】
以下、第1フィーダユニット61及び第2フィーダユニット62の詳細構成について説明する。なお、第1フィーダユニット61と第2フィーダユニット62とは、概ね同様の構成を有するので、以下では、第1フィーダユニット61を例にとって説明する。
【0046】
図8は、第1フィーダユニット61の正面図である。図9は、第1フィーダユニット61の斜視図である。図10は、図8や図9では図示していない上ベルト221及び下ベルト23に着目した図である。図11は、第1フィーダユニット61の側面図である。図12は、第1及び第2フィーダユニット61,62の一部の概略斜視図である。図13は、受け取りユニット230含む周辺の概略斜視図である。図14は、クランプ250〜252を説明するために第1フィーダユニット61及び第2フィーダユニット62からクランプ250〜252を抽出したものである。図16は、後述する制御装置9とフィルム搬送機構6との結線図である。
【0047】
図8〜図14に示すように、第1フィーダユニット61は、フレーム21と、搬送ユニット22と、クランプユニット23とを有している。
【0048】
フレーム21は、上ベルト221及び下ベルト222を支持する各プーリや、受け取りユニット230及び各クランプ250〜252を駆動するソレノイド61a〜61d(図16を参照)を支持するもので、第1フィーダユニット61の骨格を構成している。
【0049】
搬送ユニット22は、主として、ベルトユニット220と、受け取りユニット230とを有する。
【0050】
ベルトユニット220は、フィルムFの両面に接触して当該フィルムFを包装ステーション3へと搬送するものであり、上ベルト221と、下ベルト222とから構成される。上ベルト221は、フィルムFの一方の面である上面に接触するものであり、下ベルト222の上に乗っている。上ベルト221は、図10に示すように、4つのプーリ221a,221b,221c,221dに掛けられる。
【0051】
下ベルト222は、フィルムFの他方の面である下面に接触する。下ベルト222は、図10に示すように、4つのプーリ222a,222b,222c,222dに掛けられる。そして、当該4つのプーリ222a,222b,222c,222dのうち1つ(ここでは、プーリ222d)には、図12に示すように、回転軸223を介してプーリ224が接続されている。プーリ224には、ベルト225が掛けられており、駆動モータ65a(ここでは、DCブラッシュレスモータが使用されている)が制御装置9により駆動されると、当該ベルト225を介して、プーリ224にはフィーダ駆動ユニット65の駆動モータ65aによる駆動力が伝達される。すなわち、駆動モータ65aによる駆動力が回転軸223を介して当該プーリ224へ伝達されることにより、両フィーダユニット61,62の下ベルト222が同期して動く仕組みになっている。なお、下ベルト222の上に乗っている上ベルト221は、ギア(図示せず)を介して下ベルト222の動きに従動して動く。
【0052】
受け取りユニット230は、第1フィーダユニット61の左側部分、すなわち、フィルム送り出し機構5の近傍に配置され、フィルム送り出し機構5から送られるフィルムFを受け取る。受け取りユニット230は、図13に示すように、主として、フレーム231と、フレーム231に取り付けられるプーリ221aとから構成される。
【0053】
フレーム231は、主として、受け取りユニット230が回動する支軸となる軸部材231aと、プーリ221aを支持する軸部材231bと、軸部材231aの長手方向の両側端部から軸部材231bに向かって(すなわち、軸部材231aに対して垂直方向且つフィルム送り出し機構5に向かう方向に)延び、軸部材231a及び軸部材231bを連結するための1対の連結部材231cとから構成される。
【0054】
軸部材231a及び軸部材231bは、前後方向に延びる部材である。
【0055】
プーリ221aは、フレーム231の軸部材231bに支持されることによって、フレーム231に固定されている。プーリ221aには、上述したように、上ベルト221が掛けられる。すなわち、上ベルト221は、プーリ221aを介して受け取りユニット230と一体化される。よって、上ベルト221は、フィルムFを掴む掴み部、そして、当該掴んだフィルムFをフィルム搬送機構6へと導入する導入部、及び、フィルムFを包装ステーション3に搬送するための搬送部としての機能を有している。
【0056】
受け取りユニット230は、第1ソレノイド61a(第2フィーダユニット62の受け取りユニット230は、第5ソレノイド62a)の作動/非作動によって、軸部材231aを支軸として回動し、第1姿勢(図25を参照)と第2姿勢(図23を参照)とを採る。第1姿勢は、その長手方向(すなわち、左右方向)が略水平方向となる姿勢である。第2姿勢は、その長手方向が水平面に対して上方に傾斜する姿勢である。
【0057】
受け取りユニット230の第1姿勢においては、プーリ221aに掛けられる上ベルト221の下側のベルトのフィルムFを掴むための掴み部(すなわち、上ベルト221のうちフィルムFの先端を掴む際にフィルムFに接触する部分)(具体的には、掴み部の掴み面(すなわち、上ベルト221のうちフィルムFの先端を掴む際にフィルムFに接触する面))は、フィルムFの上面に接触するフィルム接触状態(図25を参照)を採る。受け取りユニット230の第2姿勢においては、プーリ221aに掛けられる上ベルト221の下側のベルトのフィルムFを掴むための掴み部(具体的には、掴み面)が、フィルムFの上面に接触しないフィルム非接触状態(図23を参照)を採る。
【0058】
より具体的には、受け取りユニット230は、第1ソレノイド61aが作動すると、軸部材231aを支軸としてその先端部が押し下げられて所定の位置まで動く(すなわち、第1姿勢を採る)。これにより、プーリ221aに掛けられる上ベルト221の掴み部(具体的には、掴み面)がフィルム接触状態になる。他方、受け取りユニット230は、第1ソレノイド61aの作動が解除されると、軸部材231aを支軸としてその先端部が押し上げられて所定の位置(第2姿勢)に戻る。これにより、上ベルト221の掴み部(具体的には、掴み面)がフィルム非接触状態になる。
【0059】
従って、第1及び第5ソレノイド61a,62aを作動すれば、上ベルト221の掴み部(具体的には、掴み面)がフィルムFに接触する(具体的には、上ベルト221の掴み部(具体的には、掴み面)と下ベルト222とでフィルムFを挟持する)ことによって、フィルム送り出し機構5から送られるフィルムFを受け取ることができる。すなわち、受け取りユニット230は、制御装置9に制御されることによって、ベルトユニット220を、フィルム送り出し機構5から送られるフィルムFをフィルム搬送機構6に導入する導入部として機能させる役割を有する。
【0060】
クランプユニット23は、図14に示すように、フィルムFの幅方向(前後方向)においてフィーダユニット61,62の内側に配置される。クランプユニット23は、第1フィーダユニット61の近傍に配置される正面側クランプ23bと、第2フィーダユニット62の近傍に配置される背面側クランプ23cとを有する。
【0061】
正面側及び背面側クランプ23b,23cは、第1サイドクランプ250(右側のクランプ)と、中央クランプ251と、第2サイドクランプ252(左側のクランプ)とを有している。第1サイドクランプ250と中央クランプ251と第2サイドクランプ252とは、平面視において一直線上に並んで配置される。
【0062】
クランプユニット23は、左右方向に延び、フィルムFの幅方向の両側端部を把持する。具体的には、クランプユニット23の下方には、クランプユニット23とともにフィルムFを挟むための樹脂製の帯板23aが配置されている。また、帯板23aは、クランプユニット23と同様に、左右方向に延び、クランプユニット23の長手方向の長さとほぼ同様である。よって、クランプユニット23は、帯板23aとともに、フィルムFを把持する把持部材としての役割を有する。帯板23aは、その上面の高さ位置が下ベルト222の上側のベルトの上面の高さ位置よりも低い位置にある。
【0063】
図16に示すように、クランプユニット23は、各クランプ250,251,252に対応して設けられるソレノイドによって作動する。具体的には、正面側クランプ23bの、第1サイドクランプ250は、第2ソレノイド61bによって、中央クランプ251は、第3ソレノイド61cによって、第2サイドクランプ252は、第4ソレノイド61dによって作動する(背面側クランプ23cの、第1サイドクランプ250は、第6ソレノイド62bによって、中央クランプ251は、第7ソレノイド62cによって、第2サイドクランプ252は、第8ソレノイド62dによって作動する)。
【0064】
クランプユニット23は、ソレノイド61b,61c,61d,62b,62c,62dが作動すると、押し下げられ帯板23aに対して下向きの荷重をかける。よって、クランプユニット23と帯板23aとの間にフィルムFがあるときは、ソレノイド61b,61c,61d,62b,62c,62dを作動すれば、フィルムFがクランプユニット23と帯板23aとの間で密着して把持される。他方、ソレノイド61b,61c,61d,62b,62c,62dの作動を解除すれば、フィルムFの把持が解除される。
【0065】
なお、フィルム搬送機構6のフィルム搬送方向の上流側には、図2や図4に示すように、カッター機構69が設けられている。カッター機構69は、フィルム送り出し機構5からフィルム搬送機構6へと受け渡されたフィルムFがフィルム搬送機構6で所定量搬送された後に、両機構5、6間においてフィルムFを切断するために設けられている。カッター機構69は、フィルムの幅よりも長い切断刃を有しており、当該切断刃をアクチュエータで移動させることによりフィルムFを切断する。
【0066】
(1−6)折り込み機構7
折り込み機構7は、包装ステーション3に搬送されたフィルムFによって、被包装物を包装する機構である。折り込み機構7は、図2や図3に示すように、左右折り込み板76,77と、後折り込み板78と、前折り込み棒79とを有する。
【0067】
左右折り込み板76,77は、フィルムFのフィルムの搬送方向の両端部をトレーTの底面側に折り込む。
【0068】
後折り込み板78は、フィルムFの第2フィーダユニット62側の側部をトレーTの底面側に折り込む。
【0069】
左右折り込み板76,77及び後折り込み板78は、図示しないモータ及びタイミングベルトによって水平移動が可能である。
【0070】
前折り込み棒79は、トレーTの排出時に、フィルムFの第1フィーダユニット61側の側部がトレーTの底面側に折り込まれるように配置されている。トレーTの排出は、排出プッシャー75がトレーTをシール機構8(前面側)に向けて押し出すことによって行われる。
【0071】
(1−7)シール機構8
図15は、シール機構8の平面図である。
【0072】
シール機構8は、排出プッシャー75によって押し出されたトレーTの底面を熱してシールする。なお、このとき、上述の押さえ機構81は、商品Gが収容されたトレーTをシール機構8の上面に押し付ける役割も有している。
【0073】
シール機構8は、図15に示すように、主として、搬送ローラ82と、加熱ローラ83と、ヒータ84と、ローラ支持部材85と、ヒータ支持部材86とを有する。
【0074】
搬送ローラ82は、2本の加熱ローラ83の前後に複数本が配置されている。搬送ローラ82は、左右一対のローラ支持部材85は、各ローラ82、83の両端を回転自在に支持している。また、加熱ローラ83は、筒状に形成されており、その内部に円柱状の電気式のヒータ84が挿入されている。ヒータ84は、いわゆるカートリッジヒータであり、加熱ローラ83と接触しておらず、両端がヒータ支持部材86に固定されている。これらのヒータ84の一端には、電極88が設けられており、この電極から通電を行うことによって、ヒータ84内の発熱コイルが発熱する。すなわち、加熱ローラ83は、ヒータ84によって加熱されている。加熱ローラ83がヒータ84によって加熱されることにより、加熱ローラ83を介して排出台11に排出されるトレーTを包装するフィルムFがトレーTの下側で熱シールされる。
【0075】
なお、加熱ローラ83には、その外表面の温度を検出する温度センサ122が接触している。当該温度センサ122は、加熱ローラ83の温度を制御装置9へと送信する。
【0076】
(1−8)排出台11
シール機構8の正面側には、商品Gが収容されたトレーTが完全に包装された状態で排出するための排出台11が設けられている。包装が完了されたトレーTには、ラベル発行機16が、ラベルプリンター15で印字処理されたラベルを貼り付ける。
【0077】
(2)制御装置9
図17は、制御装置9の制御ブロック図である。
【0078】
制御装置9は、図1に示すように、本体1aの上方部分に配置される。制御装置9は、コンピュータから構成され、図17に示すように、本体1aに配置される各機構の動作を制御する制御手段として機能する。
【0079】
制御装置9は、具体的には、主として、入出力部9aと、制御部9bと、記憶部9cとを有する。
【0080】
入出力部9aは、主として、表示パネル91と、操作キー92とから構成される。表示パネル91には、商品Gの名称、重量、価格等が表示される。表示パネル91は、タッチパネル式であり、作業者等の入力を受け付ける入力受付部としての操作ボタンも配される。操作キー92は、キーボードから構成される。
【0081】
制御部9bは、CPU等から構成される。制御部9bは、入出力部9aを介した入力信号、各種のスイッチ(主電源スイッチ17、非常停止スイッチ18(図1も参照))が押されたことによる入力信号、各種のセンサ(例えば、温度センサ122、危険回避センサ(図示せず、本体1a内に商品F及びトレーTが存在する場合に、作業者が所定エリアに入らないようにするためのセンサ))による検知信号を受信して、本体1a内の機構2,5,6,34,7,81,8,15,16,69等の動作の制御等を行う。
【0082】
記憶部9cは、RAMやROM等から構成され、表示パネル91や操作キー92等から入力された入力データや外部の装置から転送された転送データ等が記憶される。なお、入力データや転送データには、フィルムF、トレーT、商品Gのデータ等が含まれる。
【0083】
(3)ストレッチ包装装置1の動作
図18〜図22は、ストレッチ包装装置1の動作を説明するための説明図である。
【0084】
以下、上記のような構成を有するストレッチ包装装置1の動作について図18〜図22を用いて説明する。なお、以下の駆動動作は、制御装置9によって行われるものとする。
【0085】
(3−1)ストレッチ包装装置1の全体の概略動作
まず、図18に示すように作業者が商品Gを収容したトレーTを投入機構2の計量器上に載せると、計量値が安定して計量が完了するのを待って、搬入ベルトが動き出す。この搬入ベルトの動きにしたがって搬入ベルトに固定されている突起が前面側から背面側へと移動する。これにより、計量器上に載せられた商品Gは、リフター機構30の支持部材33上に押し出される(図19を参照)。
【0086】
一方、フィルムロールRからフィルム送り出し機構5によりフィルム搬送機構6へと受け渡されたフィルムFは、第1フィーダユニット61及び第2フィーダユニット62によってリフター機構30の上方まで運ばれる。そして、リフター機構30の上方において、各クランプ250〜252の作動によりフィルムFの幅方向の両側部が保持された状態となっている。
【0087】
そして、各クランプ250〜252により保持されたフィルムFに対して、ボールネジ機構34が、リフター機構30に載っている商品G及びトレーTを押し付ける(図20を参照)。これにより、各クランプ250〜252により保持されたフィルムFは、商品G及びトレーTの上部を覆うように伸張する。
【0088】
この状態において、後折り込み板78及び左右折り込み板76,77がトレーTの下側に水平移動すると、適当なタイミングで正面側クランプ23bの中央クランプ251以外のクランプがフィルムFの保持を解除して、フィルムFの周囲3辺がトレーTの下側に折り込まれる(図21を参照)。そして、排出プッシャー79aがトレーTをシール機構8側に押し出すと、折り込まれていなかった正面側のフィルムFの1辺が前折り込み棒79に当たり、シール機構8側へのトレーTの移動に従ってトレーTの下側に折り込まれていく。なお、正面側クランプ23bの中央クランプ251は、このときにフィルムFの保持が解除される。また、この移動中に、トレーTの下側に折り込まれたフィルムFが加熱ローラ83によって熱シールされ、図22に示す位置に排出されたとき(排出台11に排出されたとき)には、商品G及びトレーT全体をフィルムFが覆った包装完了の状態となる。
【0089】
さらに、計量値に基づいて算出される商品の値段や重量等がラベルプリンター15によりラベルに印字される。そして、当該ラベルが、ラベル発行機16により包装が完了されたトレーTに貼り付けされる。
【0090】
(3−2)フィルムFの搬送
図23〜図27は、フィルムFの搬送を示すための説明図である。図28は、第1及び第2フィーダユニット61,62の動作説明図である。以下、図23〜図28を用いてフィルムFの搬送について説明する。
【0091】
まず、作業者によって、フィルムロールRがロールバーにセットされる。そして、作業者によって、フィルムロールRに巻かれているフィルムFの先端が、差し込み板ユニット51に引っ掛けられる。このとき、作業者は、フィルムFの先端を、差し込み板ユニット51の正面側に形成される切り欠き53aにのみ引っ掛ける(図5を参照)。
【0092】
この状態において、フィルムロール駆動モータ4dを駆動すると、ベルト4cを介して1のフィルムロールRが回転する。これにより、フィルムロールRからフィルムFが繰り出される。そして、このとき、フィルム送り出し機構5の差し込み板ユニット51は、板部材にフィルムFを挟んだ状態で第1位置又は第2位置を採る。
【0093】
また、このとき、フィルム搬送機構6の第1フィーダユニット61及び第2フィーダユニット62の各受け取りユニット230は第2姿勢を採る(図23を参照)。すなわち、フィルムFを掴むために、上ベルト221の掴み部(具体的には、掴み面)が下ベルト222に接触していない状態となっている。
【0094】
次に、差し込み板ユニット51は、フィルムFをフィルム搬送機構6に受け渡すために、フィルム差し込み板駆動モータによってフィルム搬送機構6側に水平に移動する(図24を参照)。このとき、差し込み板ユニット51は、切り欠き部分にあるフィルムFがフィルム搬送機構6に受け渡されるように、所定位置まで移動する。具体的には、フィルム差し込み板ユニット51は、フィルムFが下ベルト221の上側のベルトの上面に接触するまで移動する(図5や図24を参照)。なお、フィルム差し込み板ユニット51が第1位置又は第2位置を採る状態において、フィルムを送り出すほうの差し込み板ユニットの下側に位置する板部材の上面と、下ベルト221の上側ベルトの上面との高さ位置は略同じである、すなわち、差し込み板ユニット51に保持されるフィルムFの高さ位置と下ベルト221の上側ベルトの上面との高さ位置は略同じである。これにより、フィルムFは、フィルム送り出し機構5からフィルム搬送機構6へ受け渡されやすくなる。なお、フィルム送り出し機構5から送られるフィルムFは、空間Sに入るようになっている(図11を参照)。
【0095】
次に、フィルムFが所定位置までくると、フィルム搬送機構6は、フィルムFの先端を掴む。具体的には、フィルムFが所定位置までくると、第1ソレノイド61a,第5ソレノイド62aの作動により、第1フィーダユニット61及び第2フィーダユニット62の受け取りユニット230が軸部材231aを支軸として回動されて、第1姿勢を採る。そして、上ベルト221の下側ベルトの下面をフィルムFに接触させる(すなわち、上ベルト221の掴み部(具体的には、掴み面)をフィルム接触状態とする)(図25を参照)。これにより、フィルムFは、上ベルト221と下ベルト222とにより挟持される。
【0096】
なお、第1フィーダユニット61は、ベルトユニット220の幅方向の位置が板部材に形成される切り欠き53aの幅方向の位置と略同じ位置になるように決定されており、フィルムFが所定位置まできたときは、当該位置に位置する。一方、このとき、第2フィーダユニット62は、第1フィーダユニット61の背面側に位置している(図28を参照)。
【0097】
そして、上ベルト221と下ベルト222とでフィルムFの先端が挟まれると、図26に示すように、フィーダ駆動ユニット65の駆動によりフィルムFが包装ステーション3側(図26においては、紙面を手前側から視て左側)に搬送される。具体的には、フィーダ駆動ユニット65を駆動することにより、第1フィーダユニット61及び第2フィーダユニット62の下ベルト222がフィルムFが包装ステーション3側に搬送されるように動き、上ベルト221もフィルムFが同方向に搬送されるように動く。すなわち、上ベルト221及び下ベルト222が動くことにより、これらに挟まれるフィルムFを包装ステーション3側へ搬送している。
【0098】
ここで、フィルムFの右側への搬送を行う際、第1フィーダユニット61の近傍に一致していた第2フィーダユニット62は、第2フィーダ移動ユニット64の作動により、フィルムFを挟持しながら背面側に移動していく(図28を参照)。これにより、フィルム搬送が進むにつれて、第1及び第2フィーダユニット61,62がフィルムFを広げた状態で保持できるようになる。
【0099】
なお、フィルムFがフィルム搬送方向に搬送され始めると、フィルム差し込み板ユニット51は、元の位置まで戻る(図23を参照)。そして、フィルムFは、包装ステーション3の中央部分まで搬送される。なお、フィルムFがフィルム搬送方向に所定量搬送されると、カッター機構69によってフィルムFが切断される(図27を参照)。
【0100】
(3−3)フィルムFの引き伸ばし動作
図29は、リフター機構30(図29には図示せず)によってトレーTが後折り込み板78及び左右折り込み板76,77よりも上方に持ち上げられたときの状態を示している。図29(a)は、側面から、図29(b)は、正面から視たときの状態を表す。
【0101】
まず、図19に示す状態、すなわち、図20や図29(a)(b)に示す前の状態においては、フィルムFが引き伸ばされるフィルム引き伸ばし動作が行われる。フィルム引き伸ばし動作は、フィルム搬送機構6によりリフター機構30の上方まで運ばれてきたフィルムFが、各クランプ250〜252(正面側クランプ23b及び背面側クランプ23c)によって把持されるフィルム把持状態で行われる。具体的には、フィルム引き伸ばし動作は、フィルムFが、各クランプ250〜252と帯板23aによってその幅方向の両側部を挟まれたフィルム把持状態で行われる。そして、引き伸ばし動作では、各クランプ250〜252と帯板23aとによるフィルム把持状態において、第1フィーダユニット61及び第2フィーダユニット62がフィルムFの幅方向に離反するように移動することによって、フィルムFが幅方向の外側に引き伸ばされる。なお、このときのフィルムFの引き伸ばし量は、作業者等によって決められた任意の値であり、制御装置9の記憶部9cに予め記憶されている。
【0102】
フィルム引き伸ばし動作では、フィルムFが伸張し緊張保持される。フィルムFの引き伸ばし動作において(すなわち、各クランプ250〜252がフィルム把持状態を採るとき)、上ベルト221のフィルムFの掴み部(具体的には、掴み面)はフィルム接触状態となっている。なお、このとき、例えば、受け取りユニット230を第1及び第5ソレノイド61a,62aによって作動させることにより、第1姿勢よりも下ベルト222側の姿勢(第3姿勢)を採らせたとする。このとき、上ベルト221をクランプユニット23とは別の補助的なクランプとして機能させることができる。
【0103】
なお、フィーダ駆動ユニット65の駆動モータ65aには、DCブラッシュレスモータが使用されている。当該DCブラッシュレスモータには位置を検出できるエンコーダが取り付けられており、所定位置を原点位置としてフィーダユニット61,62の位置を検出できる。ここで、フィーダユニットは、上述のような引き伸ばし動作等を行うために前後方向に移動するので、エンコーダにより検出された検出位置と、第1及び第2フィーダユニットが実際に存在する位置とに誤差が生じることが懸念される。
【0104】
そこで、本体1a内に配置される危険回避センサを用いて、当該危険回避センサが配置される位置を原点位置として、当該原点位置をフィーダユニット61,62が通る場合には、今までカウントしたデータをキャンセルして、その時点からカウントを開始している。これにより、フィーダユニット61,62の実際の位置を精度よく検出できる。
【0105】
(3−4)フィルムFの折り込み動作
図30〜図32は、フィルムFの折り込み動作の説明図である。
【0106】
この図30に示す状態までトレーTが持ち上げられると、後折り込み板78及び左右折り込み板76,77がトレーTの下方の空間に向かって水平移動してくる。そして、図30に示すように、後折り込み板78及び左右折り込み板76,77がフィルムFを側方から押し始める。
【0107】
そして、さらに後折り込み板78及び左右折り込み板76,77が移動して、それらの先端がある程度トレーTの下方に入ってくると、図31に示すように、第2フィーダ移動ユニット64の駆動モータ64aが作動して、第2フィーダユニット62(図31の背面側クランプ23cを含むもの)がフィルムFの幅方向の内側に寄ってくる。
【0108】
そして、所定の位置まで後折り込み板78及び左右折り込み板76,77が進むと、順次クランプ250〜252のフィルムFへの保持が解除される(図32を参照)。なお、このとき、フィルムFの引き伸ばし動作においてフィルムFの補助クランプとして機能していた上ベルト221のフィルム接触状態も解除される。すなわち、上ベルト221は、受け取りユニット230の駆動により、第1及び第2サイドクランプ250,252と同様の動きをする。
【0109】
この後、さらに後折り込み板78及び左右折り込み板76,77が移動して、正面側を除くフィルムFの周囲3辺がトレーTの下側に折り込まれていく。このときには、正面側クランプ23bの中央クランプ251を除いては、各クランプがフィルムFの保持を解除した状態となっている。
【0110】
そして、上述のように、排出プッシャー79aでトレーTをシール機構8側に押すと折り込まれていなかった正面側のフィルムFの1辺が前折り込み棒79に当たり、シール機構8側へのトレーTの移動に従って、トレーTの下側に折り込まれていく。このときに、正面側クランプ23bの中央クランプ251によるフィルムFの保持が解除される。
【0111】
(4)特徴
(4−1)
本実施形態では、フィルム搬送機構6のフィーダユニット61,62によって包装ステーション3の中央部分に搬送されたフィルムFに商品G及びトレーTを押し付けることでこれらをフィルムFで包装する。
【0112】
フィルム搬送機構6が、フィルム送り出し機構5によって受け渡されたフィルムFの先端を掴んで、すなわち、フィルム送り出し機構5によって受け渡されたフィルムFをフィルム搬送機構6に導入して、フィルムFを包装ステーションまで搬送する。
【0113】
具体的には、フィルムFの両面に接触してフィルムFを搬送する搬送部材であるベルトユニット220の、フィルムFを包装ステーション3まで搬送する第1搬送部として機能する上ベルト221のフィルムFの上面に接触する掴み部(具体的には、掴み面)が、状態を変更されることでフィルム搬送機構6がフィルムFを掴んでいる。状態の変更とは、フィルムFに接触する状態とフィルムに接触しない状態との変更である。なお、ベルトユニット220の下ベルト222は、フィルムFを包装ステーション3まで搬送する第2搬送部として機能する。下ベルト222は、フィルムFの下面に接触する上面を有する。
【0114】
上ベルト221の下面のフィルム非接触状態からフィルム接触状態への変更は、制御装置9(具体的には、制御部9b)が、上ベルト221の状態を変更させる状態変更部材として機能する受け取りユニット230を制御することによって行う。
【0115】
また、フィルム搬送機構6は、フィルムFの引き伸ばし動作、及び/又は、フィルムFの折り込み動作において、フィルムFを把持するフィルム把持状態を採るクランプユニット23を有している。具体的には、クランプユニット23は、その下方に配置される帯板23aとともにフィルムFを把持する。
【0116】
本実施形態では、受け取りユニット230を制御することで、上ベルト221の掴み部(具体的には、掴み面)をフィルムFの先端に接触させることができる。すなわち、上ベルト221でフィルムFの先端を掴み、フィルム搬送機構6へ導入することができる。すなわち、上ベルト221を、フィルムFを掴むためのものとして機能させることができる。これにより、フィルムFを掴むための部材等を別途たくさん配置しなくてもよいので、省スペース化を図ることができる。
【0117】
(4−2)
本実施形態では、制御部9bは、クランプユニット23がフィルム把持状態を採るときに、受け取りユニット230を制御することによって上ベルト221の掴み部(具体的には、掴み面)をフィルム接触状態にできる。このとき、受け取りユニット230が制御されることで、上ベルト221によってフィルムF(下ベルト222)に対してより荷重がかかるようにすれば(すなわち、受け取りユニット230を第3姿勢にすれば)、上ベルト221を下ベルト222とともに、クランプユニット23とは別の補助的なクランプとして機能させることができる。なお、補助的なクランプとしての機能は、フィルムFの引き伸ばし動作や折り込み動作においてより有効になる。
【0118】
また、受け取りユニット230を制御することで、上ベルト222をクランプとして機能させる場合は、クランプユニット230の長手方向の長さを短くすることもできる。
【0119】
(4−3)
受け取りユニット230は、所定軸を支軸として回動可能である。具体的には、受け取りユニット230は、制御部9bによって、軸部材231aを支軸として回動する。より具体的には、制御部9bによって各ソレノイドが作動されることにより、受け取りユニット230は、第1姿勢と第2姿勢とが切り替えられる。これにより、簡易にフィルムFを掴むことができる。
【0120】
(4−4)
受け取りユニット230は、第1姿勢の状態において、その長手方向が略水平方向となるように配置される。これにより、平面視においてベルトユニット220の延長線上に受け取りユニット230を配置することができる。よって、省スペース化が可能になる。
【0121】
(4−5)
受け取りユニット230の一部には、搬送ベルトとしての上ベルト221が掛けられる。これにより、上ベルト221を受け取りユニット230と一体化させることができる。すなわち、上ベルト221が受け取りユニット230の機能を有するので、省スペース化を図れる。
【0122】
(5)変形例
以上、本発明の実施形態について図面に基づいて説明したが、具体的な構成は、上記の実施形態に限られるものではなく、発明の要旨を逸脱しない範囲で変更可能である。
【0123】
(5−1)変形例1A
上記実施形態では、受け取りユニット230は、上ベルト221の掴み部(具体的には、掴み面)がフィルムFの先端を掴んでからフィルムFの折り込み動作までは、第1姿勢を採ると説明し、また、フィルムFの折り込み動作において、受け取りユニット230は、第1及び第2サイドクランプ250,252と同様の動きをすると説明したがこれに限られるものではない。例えば、受け取りユニット230は、上ベルト221の掴み部(具体的には、掴み面)がフィルムFの先端を掴んだ後すぐに第1姿勢から第2姿勢に変更されてもよい。そして、次のフィルムFを掴むまでは、第2姿勢を採っていてもよい。
【0124】
なお、この場合、フィルムFの引き伸ばし動作や折り込み動作において受け取りユニット230を第1姿勢にしたい場合は、再度制御装置9が制御すればよい。
【0125】
(5−2)変形例1B
上記実施形態では、上ベルト221と下ベルト222とでフィルムFの先端を掴むと説明したが、これに限られるものではない。例えば、電気的機構等を用いることでフィルムFを掴むことができる場合、搬送部材である上ベルト221の掴み部のみがフィルムFに接触しないフィルム非接触状態からフィルムFに接触するフィルム接触状態へ変更することで、フィルム搬送機構6がフィルムFを掴んでもよい。この場合であっても、上ベルト221の掴み部がフィルムFを掴むことができるので、上述と同様の効果を奏する。また、例えば、搬送部材が、ベルトと、フィルムFを掴むことが可能な掴み部との組み合わせである場合も、掴み部がフィルムFを掴めるので、上述と同様の効果を奏する。
【産業上の利用可能性】
【0126】
本発明は、包装装置、特に、緊張保持させたフィルムに被包装物を押し付けるストレッチ機能を有する包装装置に種々適用可能である。
【符号の説明】
【0127】
1 包装装置
3 包装ステーション(包装部)
6 フィルム搬送機構(搬送機構)
9 制御装置
9b 制御部
23 クランプユニット(把持部材)
221 上ベルト(搬送部材、第1搬送部)
222 下ベルト(第2搬送部)
230 受け取りユニット(搬送部材状態変更部材)
231a 軸部材
F フィルム
G 商品(被包装物)
T トレー(被包装物)
【先行技術文献】
【特許文献】
【0128】
【特許文献1】特開平9−12004号公報
【特許請求の範囲】
【請求項1】
緊張保持させたフィルムに対して被包装物を押し付けることによって前記被包装物を包装する包装部と、
前記包装部に前記フィルムを搬送する搬送機構と、
前記搬送機構の駆動を制御する制御部と、
を備え、
前記搬送機構は、
前記フィルムを前記包装部に移動させる搬送部材と、
少なくとも前記フィルムの先端を掴むために、前記搬送部材の掴み部が前記フィルムに接触していないフィルム非接触状態から前記搬送部材の掴み部が前記フィルムに接触するフィルム接触状態に変更する搬送部材状態変更部材と、
前記フィルムの引き伸ばし動作、及び/又は、前記フィルムの折り込み動作において、前記フィルムを把持するフィルム把持状態を採る把持部材と、
を有し、
前記制御部は、前記把持部材が前記フィルム把持状態を採るときに、前記搬送部材状態変更部材を制御することによって前記搬送部材の掴み部を前記フィルム接触状態にできる、
ストレッチ包装装置。
【請求項2】
緊張保持させたフィルムに対して被包装物を押し付けることによって前記被包装物を包装する包装部と、
前記包装部に前記フィルムを搬送する搬送機構と、
前記搬送機構の駆動を制御する制御部と、
を備え、
前記搬送機構は、
前記フィルムの両面に接触して前記包装部に移動させ、前記フィルムの一方の面に接触する第1搬送部と前記フィルムの他方の面に接触する第2搬送部とを含む、搬送部材と、
少なくとも前記フィルムの先端を掴むために、前記第1搬送部の前記フィルムの一方の面に接触する掴み面が前記フィルムに接触していないフィルム非接触状態から前記掴み面が前記フィルムに接触するフィルム接触状態に変更する搬送部材状態変更部材と、
前記フィルムの引き伸ばし動作、及び/又は、前記フィルムの折り込み動作において、前記フィルムを把持するフィルム把持状態を採る把持部材と、
を有し、
前記制御部は、前記把持部材が前記フィルム把持状態を採るときに、前記搬送部材状態変更部材を制御することによって前記掴み面を前記フィルム接触状態にできる、
ストレッチ包装装置。
【請求項3】
前記制御部は、前記引き伸ばし動作において前記把持部材が前記フィルム把持状態を採るときに、前記搬送部材状態変更部材を制御することによって前記搬送部材の掴み部を前記フィルム接触状態とする、
請求項1に記載のストレッチ包装装置。
【請求項4】
前記搬送部材状態変更部材は、所定軸を支軸として回動可能であり、
前記制御部は、前記搬送部材状態変更部材を制御することによって、前記搬送部材の掴み部を前記所定軸を支軸として回動させる、
請求項1又は3に記載のストレッチ包装装置。
【請求項5】
前記搬送部材状態変更部材は、前記フィルム接触状態において、その長手方向が略水平方向となるように配置される、
請求項1〜4のいずれか1項に記載のストレッチ包装装置。
【請求項6】
前記搬送部材は、搬送ベルトであり、
前記搬送部材状態変更部材には、前記搬送ベルトが掛けられる、
請求項1、3、4のいずれか1項に記載のストレッチ包装装置。
【請求項1】
緊張保持させたフィルムに対して被包装物を押し付けることによって前記被包装物を包装する包装部と、
前記包装部に前記フィルムを搬送する搬送機構と、
前記搬送機構の駆動を制御する制御部と、
を備え、
前記搬送機構は、
前記フィルムを前記包装部に移動させる搬送部材と、
少なくとも前記フィルムの先端を掴むために、前記搬送部材の掴み部が前記フィルムに接触していないフィルム非接触状態から前記搬送部材の掴み部が前記フィルムに接触するフィルム接触状態に変更する搬送部材状態変更部材と、
前記フィルムの引き伸ばし動作、及び/又は、前記フィルムの折り込み動作において、前記フィルムを把持するフィルム把持状態を採る把持部材と、
を有し、
前記制御部は、前記把持部材が前記フィルム把持状態を採るときに、前記搬送部材状態変更部材を制御することによって前記搬送部材の掴み部を前記フィルム接触状態にできる、
ストレッチ包装装置。
【請求項2】
緊張保持させたフィルムに対して被包装物を押し付けることによって前記被包装物を包装する包装部と、
前記包装部に前記フィルムを搬送する搬送機構と、
前記搬送機構の駆動を制御する制御部と、
を備え、
前記搬送機構は、
前記フィルムの両面に接触して前記包装部に移動させ、前記フィルムの一方の面に接触する第1搬送部と前記フィルムの他方の面に接触する第2搬送部とを含む、搬送部材と、
少なくとも前記フィルムの先端を掴むために、前記第1搬送部の前記フィルムの一方の面に接触する掴み面が前記フィルムに接触していないフィルム非接触状態から前記掴み面が前記フィルムに接触するフィルム接触状態に変更する搬送部材状態変更部材と、
前記フィルムの引き伸ばし動作、及び/又は、前記フィルムの折り込み動作において、前記フィルムを把持するフィルム把持状態を採る把持部材と、
を有し、
前記制御部は、前記把持部材が前記フィルム把持状態を採るときに、前記搬送部材状態変更部材を制御することによって前記掴み面を前記フィルム接触状態にできる、
ストレッチ包装装置。
【請求項3】
前記制御部は、前記引き伸ばし動作において前記把持部材が前記フィルム把持状態を採るときに、前記搬送部材状態変更部材を制御することによって前記搬送部材の掴み部を前記フィルム接触状態とする、
請求項1に記載のストレッチ包装装置。
【請求項4】
前記搬送部材状態変更部材は、所定軸を支軸として回動可能であり、
前記制御部は、前記搬送部材状態変更部材を制御することによって、前記搬送部材の掴み部を前記所定軸を支軸として回動させる、
請求項1又は3に記載のストレッチ包装装置。
【請求項5】
前記搬送部材状態変更部材は、前記フィルム接触状態において、その長手方向が略水平方向となるように配置される、
請求項1〜4のいずれか1項に記載のストレッチ包装装置。
【請求項6】
前記搬送部材は、搬送ベルトであり、
前記搬送部材状態変更部材には、前記搬送ベルトが掛けられる、
請求項1、3、4のいずれか1項に記載のストレッチ包装装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】

【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【公開番号】特開2012−176772(P2012−176772A)
【公開日】平成24年9月13日(2012.9.13)
【国際特許分類】
【出願番号】特願2011−40709(P2011−40709)
【出願日】平成23年2月25日(2011.2.25)
【出願人】(000147833)株式会社イシダ (859)
【Fターム(参考)】
【公開日】平成24年9月13日(2012.9.13)
【国際特許分類】
【出願日】平成23年2月25日(2011.2.25)
【出願人】(000147833)株式会社イシダ (859)
【Fターム(参考)】
[ Back to top ]