
ストロークシミュレータ、このストロークシミュレータを有するマスタシリンダ、およびこのマスタシリンダを用いたブレーキシステム
【課題】作動開始時により一層小さな入力で入力軸を作動開始させることができるようにして、ストロークシミュレーション機能の作動開始をより一層スムーズに行う。
【解決手段】入力軸4の作動開始時に補助動力部28の電磁石29がN極に励磁されることで、この電磁石29とS極に励磁された永久磁石30との間の吸引力により補助動力がシミュレータ作動ピストン14に前進方向に加えられる。これにより、入力軸4の作動開始時の入力が小さくなる。また、入力軸4の後退ストローク時に電磁石29がS極に励磁されることで、電磁石29と永久磁石30との間の反発力により補助動力がシミュレータ作動ピストン14に後退方向に加えられる。このとき、電磁石29への通電を制御することで、所望のヒステリシスが得られる。
【解決手段】入力軸4の作動開始時に補助動力部28の電磁石29がN極に励磁されることで、この電磁石29とS極に励磁された永久磁石30との間の吸引力により補助動力がシミュレータ作動ピストン14に前進方向に加えられる。これにより、入力軸4の作動開始時の入力が小さくなる。また、入力軸4の後退ストローク時に電磁石29がS極に励磁されることで、電磁石29と永久磁石30との間の反発力により補助動力がシミュレータ作動ピストン14に後退方向に加えられる。このとき、電磁石29への通電を制御することで、所望のヒステリシスが得られる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ブレーキシステム等に用いられ、ストロークに応じた反力を発生させるストロークシミュレータの技術分野、このストロークシミュレータを有するマスタシリンダの技術分野、およびこのマスタシリンダを用いたブレーキシステムの技術分野に関するものである。なお、本発明の明細書の記載において、前後方向の関係は、ブレーキペダルの踏み込み時に入力軸が移動する方向を「前」、ブレーキペダルの踏み込み解除時に入力軸が戻る方向を「後」とする。
【背景技術】
【0002】
乗用車等の自動車においては、ハイブリッド車や電気自動車の開発が進んでいる。これに伴い、自動車のブレーキシステムにおいては、回生ブレーキと摩擦ブレーキとを協調して用いられる回生協調ブレーキシステムが種々開発されている。この回生協調ブレーキシステムは、ブレーキペダルの踏み込みストロークを検出し、検出されたストロークに基づいて、制御部(Electric control unit: ECU)が回生ブレーキによるブレーキ力と摩擦ブレーキによるブレーキ力とを演算し、演算されたブレーキ力で自動車にブレーキがかけられる。
【0003】
このような回生協調ブレーキシステムにおいては、制御部がブレーキペダルの踏み込みストロークに基づいてブレーキ力を決定するため、ブレーキペダルの踏み込みストロークに応じた反力が運転者に伝達されない。そこで、運転者がブレーキペダルの踏み込みストロークに応じた反力を認識可能にするため、ペダル感覚シミュレータ部を有するマスタシリンダが提案されている(例えば、特許文献1参照)。
【0004】
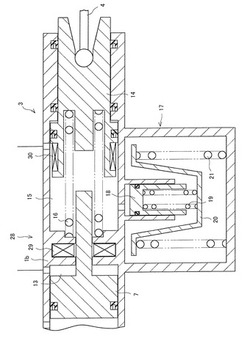
図5は、この特許文献1に記載されているペダル感覚シミュレータ部を有するマスタシリンダを模式的に示す図である。図中、1はマスタシリンダ、2は摩擦ブレーキのブレーキ液圧を発生するタンデムマスタシリンダ部、3はタンデムマスタシリンダ部2に一体的に設けられたペダル感覚シミュレータ部(ストロークシミュレータ)、4はブレーキペダル(図5には不図示)の踏み込みに応じてストロークする入力軸、5は入力軸4のストロークを検出するストロークセンサ、6はブレーキ液を貯留するリザーバタンクである。
【0005】
タンデムマスタシリンダ部2は、従来周知のタンデムマスタシリンダと同様に、プライマリピストン7、セカンダリピストン8、プライマリピストン7とセカンダリピストン8で区画されるプライマリ液圧室9、セカンダリピストン8で区画されるセカンダリ液圧室10、プライマリピストン7を常時非作動位置の方へ付勢するプライマリスプリング11、セカンダリピストン8を常時非作動位置の方へ付勢するセカンダリスプリング12を有する。プライマリ液圧室9は一方のブレーキ系統のブレーキシリンダ(図5には不図示)
に常時連通するとともに、図示のプライマリピストン7の非作動位置でリザーバタンク6に連通し、かつプライマリピストン7が前進するとリザーバタンク6から遮断されて、プライマリ液圧室9にブレーキ液圧が発生される。セカンダリ液圧室10は他方のブレーキ系統のブレーキシリンダ(図5には不図示)に常時連通するとともに、図示のセカンダリ
ピストン8の非作動位置でリザーバタンク6に連通し、かつセカンダリピストン8が前進するとリザーバタンク6から遮断されて、セカンダリ液圧室10にブレーキ液圧が発生される。
【0006】
更に、タンデムマスタシリンダ部2は、プライマリピストン7とシリンダ壁との間に動力室13を有する。この動力室13には、ブレーキ作動時に図示しない動力源から作動液
が供給される。その場合、作動液は、動力室13の液圧が制御部で演算された摩擦ブレーキによるブレーキ力に応じた液圧となるように供給される。
【0007】
ペダル感覚シミュレータ部3は、入力軸4により作動されるシミュレータ作動ピストン14、シミュレータ作動ピストン14の作動によってシミュレータ作動液圧が発生するシミュレータ作動液圧室15、シミュレータ作動ピストン14を常時非作動位置の方へ付勢するコイルばねからなるシミュレータ作動ピストンリターンスプリング16、およびペダル感覚シミュレータカートリッジ17を有する。また、ペダル感覚シミュレータカートリッジ17は、シミュレータ作動液圧室15のシミュレータ作動液圧が作用される第1反力シミュレータピストン18(本発明の反力シミュレータ部材に相当)、第1反力シミュレータピストン18を常時非作動位置の方へ付勢する第1反力シミュレータスプリング19(本発明の反力シミュレータ部材に相当)、第1反力シミュレータスプリング19を支持する第2反力シミュレータピストン20(本発明の反力シミュレータ部材に相当)、第2反力シミュレータピストン20を常時非作動位置の方へ付勢する第2反力シミュレータスプリング21(本発明の反力シミュレータ部材に相当)を有する。
【0008】
このペダル感覚シミュレータ部3においては、ブレーキペダルが踏み込まれない非作動時には、シミュレータ作動ピストン14は図5に示す非作動位置にある。この状態では、シミュレータ作動液圧室15はリザーバタンク6に連通し、シミュレータ作動液圧室15内はシミュレータ作動液圧が発生しなく大気圧となっている。したがって、第1反力シミュレータピストン18および第2反力シミュレータピストン20は図5に示す非作動位置にある。
【0009】
そして、ブレーキペダルが踏み込まれると、入力軸4が前進ストローク(図5において左動)するので、シミュレータ作動ピストン14がシミュレータ作動ピストンリターンスプリング16を弾性的に撓ませながら前進(作動)する。シミュレータ作動ピストン14の作動でシミュレータ作動液圧室15がリザーバタンク6から遮断されると、シミュレータ作動液圧室15内にシミュレータ作動液圧が発生する。このシミュレータ作動液圧は第1反力シミュレータピストン18に作用する。シミュレータ作動液圧が所定の液圧に増大すると、このシミュレータ作動液圧により第1反力シミュレータピストン18は第1反力シミュレータスプリング19を押圧して弾性的に撓ませながら図5において下方へ移動(作動)するとともに、第1反力シミュレータピストン18の押圧力で第2反力シミュレータピストン20が第2反力シミュレータスプリング21を撓ませながら図5において下方へ移動(作動)する。これにより、第1および第2反力シミュレータスプリング19,2
1はそれらの撓み量に応じた力を第1反力シミュレータピストン18に反力として作用する。
【0010】
そして、シミュレータ作動液圧による第1反力シミュレータピストン18への作用力と第1反力シミュレータスプリング19による第1反力シミュレータピストン18への作用力とがバランスすると、第1および第2反力シミュレータピストン18,20の移動が停
止する。このとき、シミュレータ作動液圧室15内のシミュレータ作動液圧はブレーキペダルの踏み込みストロークに応じた液圧となる。そして、第1反力シミュレータピストン18の反力はシミュレータ作動液圧に変換されてシミュレータ作動ピストン14に作用し、更に反力はシミュレータ作動ピストン14から入力軸4を介してブレーキペダルに伝達される。これにより、運転者はブレーキペダルからブレーキペダルの踏み込みストロークに応じた反力を認識する。こうして、ペダル感覚シミュレータ部3はストロークシミュレータ機能を発揮する。
【0011】
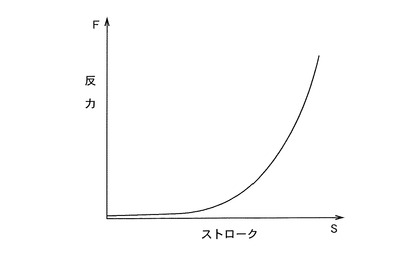
このように構成されたペダル感覚シミュレータ部3におけるペダル感覚特性線図(つまり、ブレーキペダルのストロークSに対する反力Fの特性線図)は、図6に示す特性線図
となる。すなわち、ペダル感覚特性線図は、ペダル感覚シミュレータ部3の作動初期ではストロークの増大に対して反力が比較的小さく、ストロークが所定量大きくなると、ストロークの増大に対して反力が比較的大きくなるように湾曲した特性曲線を描く。
【0012】
一方、このマスタシリンダ1においては、ブレーキペダルが踏み込まれない非作動時には、タンデムマスタシリンダ部2およびペダル感覚シミュレータ部3はともに図5に示す非作動状態にある。すなわち、動力室13に動力源から作動液が供給されなく、プライマリピストン7およびセカンダリピストン8はともに図5に示す非作動位置にある。したがってプライマリ液圧室9およびセカンダリ液圧室10はともにリザーバタンク6に連通し、プライマリ液圧室9およびセカンダリ液圧室10内にはブレーキ液圧は発生していない。また、シミュレータ作動液圧室15はリザーバタンク6に連通し、シミュレータ作動液圧室15内にはシミュレータ作動液圧は発生しない。
【0013】
また、ブレーキペダルが踏み込まれると、前述のように入力軸4が前進ストロークし、この入力軸4の前進ストロークがストロークセンサ5により検出される。図示しない制御部は、ストロークセンサ5からの入力軸4のストローク(つまり、ブレーキペダルの踏み込みストローク)に基づいて動力源を駆動制御する。これにより、動力源から作動液が動力室13に供給され、プライマリピストン7およびセカンダリピストン8が前進する。すると、プライマリ液圧室9およびセカンダリ液圧室10がともにリザーバタンク6から遮断されて、プライマリ液圧室9およびセカンダリ液圧室10内にブレーキ液圧が発生する。これらのブレーキ液圧がそれぞれ2系統の対応するブレーキシリンダに供給され、自動車の対応する車輪にブレーキがかけられる。
【0014】
動力室13内の作動液圧がブレーキペダルの踏み込みストロークに対応した液圧となると、制御部は動力源を停止する。すると、プライマリピストン7およびセカンダリピストン8がともに停止し、プライマリ液圧室9およびセカンダリ液圧室10内のブレーキ液圧はともにブレーキペダルの踏み込みストロークに対応した液圧となる。すなわち、ブレーキペダルの踏み込みストロークに対応したブレーキ力でブレーキが車輪にかけられる。
【0015】
このとき、前述のようにペダル感覚シミュレータ部3は、ストロークシミュレータ機能によりブレーキペダルの踏み込みストロークに対応した反力をブレーキペダルに伝達する。したがって、運転者はこの反力を認識して、ブレーキペダルの踏み込みストロークに対応したブレーキ力でブレーキが車輪にかけられることを感知する。
【0016】
ブレーキペダルが解放されると、入力軸4が後方(非作動位置の方)へストロークし、この入力軸4のストロークがストロークセンサ5により検出される。制御部は、ストロークセンサ5で検出されたストロークに基づいて図示しない制御弁を制御し、動力室13内の作動液をリザーバタンク6に排出する。これにより、動力室13内の液圧が低下し、プライマリピストン7およびセカンダリピストン8がそれぞれプライマリスプリング11およびセカンダリスプリング12の付勢力で後退する。動力室13内の液圧が大気圧となると、プライマリピストン7およびセカンダリピストン8がともに図5に示す非作動位置となり、車輪のブレーキが解除する。
【0017】
一方、入力軸4が後方へストロークすることで、シミュレータ作動ピストンリターンスプリング16の付勢力でシミュレータ作動ピストン14が後退する。そして、シミュレータ作動ピストン14が非作動位置近傍になると、シミュレータ作動液圧室15がリザーバタンク6に連通し、シミュレータ作動液圧室15内のシミュレータ作動液圧が低下する。シミュレータ作動ピストン14が図5に示す非作動位置になった状態では、シミュレータ作動液圧室15の液圧は大気圧となる。これにより、第1反力シミュレータピストン18および第2反力シミュレータピストン20もともに図5に示す非作動位置となる。なお、
各構成要素に用られている用語および符号は、いずれも特許文献1に記載された用語および符号と同じ用語および符号ではない。
【先行技術文献】
【特許文献】
【0018】
【特許文献1】特許第4510388号公報。
【発明の概要】
【発明が解決しようとする課題】
【0019】
ところで、特許文献1に記載のペダル感覚シミュレータ部3は、シミュレータ作動ピストンリターンスプリング16、第1反力シミュレータスプリング19、および第2反力シミュレータスプリング21の複数のスプリングを有している。一方、ペダル感覚シミュレータ部3が作動開始するためには、シミュレータ作動ピストン14が作動する必要があるが、シミュレータ作動ピストン14はこれらの複数のスプリングを撓ませながら作動しなければならない。このため、ペダル感覚シミュレータ部3の作動開始時に、シミュレータ作動ピストン14が作動開始する力が大きくなる。したがって、ペダル感覚シミュレータ部3の作動開始時には入力軸4が大きな入力を加える必要があるため、大きなペダル踏力が必要となる。その結果、ストロークシミュレーション機能の作動開始をスムーズに行うことが難しいという問題が考えられる。
【0020】
本発明はこのような事情に鑑みてなされたものであって、その目的は、作動開始時により一層小さな入力で入力軸を作動開始させることができるようにして、ストロークシミュレーション機能の作動開始をより一層スムーズに行うことができるストロークシミュレータ、このストロークシミュレータを有するマスタシリンダ、およびこのマスタシリンダを用いたブレーキシステムを提供することである。
【課題を解決するための手段】
【0021】
前述の課題を解決するために、本発明に係るストロークシミュレータは、入力が加えられて作動する入力軸と、前記入力軸により作動されるシミュレータ作動ピストンと、前記シミュレータ作動ピストンを非作動位置の方向に付勢するシミュレータ作動ピストンリターンスプリングと、前記シミュレータ作動ピストンの作動により、前記入力軸の入力に基づいた反力を前記シミュレータ作動ピストンに出力する反力シミュレータ部材と、少なくとも前記入力軸の作動開始時に補助動力を前記シミュレータ作動ピストンに前記シミュレータ作動ピストンの作動方向に加える補助動力部とを有することを特徴としている。
【0022】
また、本発明に係るストロークシミュレータは、前記電磁石に対する通電(電力供給)を制御する制御部を有し、前記補助動力部が、ハウジングに配設された電磁石と前記シミュレータ作動ピストンに配設されるとともにN極およびS極のいずれか一方の磁極に励磁された磁石とを有し、前記制御部が、少なくとも前記入力軸の作動開始時に前記電磁石がN極およびS極のいずれか他方の磁極に励磁されるように前記電磁石に対し通電制御することで、前記電磁石と前記磁石との間の吸引力により前記補助動力を前記シミュレータ作動ピストンに加えることを特徴としている。
【0023】
更に、本発明に係るストロークシミュレータは、前記補助動力部が、前記入力軸の前進ストローク時に補助動力を前記シミュレータ作動ピストンに前記シミュレータ作動ピストンの前進方向に加えるとともに、前記入力軸の後退ストローク時に補助動力を前記シミュレータ作動ピストンに前記シミュレータ作動ピストンの後退方向に加えることを特徴としている。
【0024】
更に、本発明に係るストロークシミュレータは、前記電磁石に対する通電を制御する制
御部を有し、前記補助動力部が、ハウジングに配設された電磁石と前記シミュレータ作動ピストンに配設されるとともにN極およびS極のいずれか一方の磁極に励磁された磁石とを有し、前記制御部が、少なくとも前記入力軸の作動開始時に前記電磁石がN極およびS極のいずれか他方の磁極に励磁されるように前記電磁石に対し通電制御することで、前記補助動力部が前記電磁石と前記磁石との間の吸引力により前記補助動力を前記シミュレータ作動ピストンに加え、前記制御部が、前記入力軸の後退ストローク時に前記電磁石が前記シミュレータ作動ピストンに配設された前記磁石の磁極と同じ磁極に励磁されるように前記電磁石に対し通電制御することで、前記補助動力部が前記電磁石と前記磁石との間の反発力により前記補助動力を前記シミュレータ作動ピストンに加えることを特徴としている。
【0025】
更に、本発明に係るマスタシリンダは、入力軸の入力に基づいた反力を出力するストロークシミュレータと前記入力軸の入力に基づいた液圧を発生するマスタシリンダピストンとを有するマスタシリンダにおいて、前記ストロークシミュレータが、前述の本発明のストロークシミュレータのいずれか1つであることを特徴としている。
【0026】
更に、本発明に係るブレーキシステムは、ブレーキペダルと、前記ブレーキペダルの踏み込みで作動して前記ブレーキペダルの踏み込みに基づいたブレーキ液圧を発生するマスタシリンダと、前記マスタシリンダで発生された前記ブレーキ液圧でブレーキ力を発生するブレーキシリンダとを備えるブレーキシステムにおいて、前記マスタシリンダが、前述のマスタシリンダであることを特徴としている。
【発明の効果】
【0027】
このように構成された本発明に係るストロークシミュレータ、これを有するマスタシリンダ、およびブレーキシステムによれば、少なくともストロークシミュレータの作動開始時に、補助動力部によりシミュレータ作動ピストンシミュレータ作動ピストンにその作動方向に補助動力を加えている。したがって、シミュレータ作動ピストンはストロークシミュレータに配設される複数のスプリングを撓ませながら作動させるようにしても、ストロークシミュレータの作動開始時に、シミュレータ作動ピストンが作動開始する力を小さくすることができる。これにより、ストロークシミュレータの作動開始時には入力軸をより一層小さな入力で前進ストローク(作動)させることができる。その結果、ストロークシミュレータを有するマスタシリンダを用いたブレーキシステムによれば、ブレーキペダルをより小さなペダル踏力で踏み込みストロークさせることが可能となり、ストロークシミュレータのストロークシミュレーション機能の作動開始をより一層スムーズに行うことができる。
【0028】
また、補助動力部は、ハウジングに配設された電磁石とシミュレータ作動ピストンに配設された磁石とを有する。そして、入力軸の前進ストローク時および入力軸の後退ストローク時に、それぞれ電磁石への通電量を制御して電磁石と磁石との間の吸引力および反発力を適宜制御することで、ストロークシミュレータにヒステリシスを持たせることができる。その場合、電磁石に対する通電制御を容易に行うことができるので、容易に所望のヒステリシスを得ることができる。更に、電磁石への通電量を制御することで、入力軸の入力つまりペダル踏力を可変にできる。これにより、ブレーキペダルのペダル踏力の設定をユーザの要望に応じて柔軟に対応することが可能となる。
【図面の簡単な説明】
【0029】
【図1】本発明に係るストロークシミュレータの実施の形態の一例を有するマスタシリンダ、およびこのマスタシリンダを用いたブレーキシステムを模式的に示す図である。
【図2】図1におけるII部の部分拡大図である。
【図3】図1に示す例のストロークシミュレータの電磁石の通電制御について説明する図である。
【図4】電磁石の通電制御を行うためのフローを示す図である。
【図5】特許文献1に記載されている従来のペダル感覚シミュレータ部を有するマスタシリンダを模式的に示す図である。
【図6】図5に示すペダル感覚シミュレータ部のペダル感覚特性線図である。
【発明を実施するための形態】
【0030】
以下、図面を用いて本発明を実施するための形態について説明する。
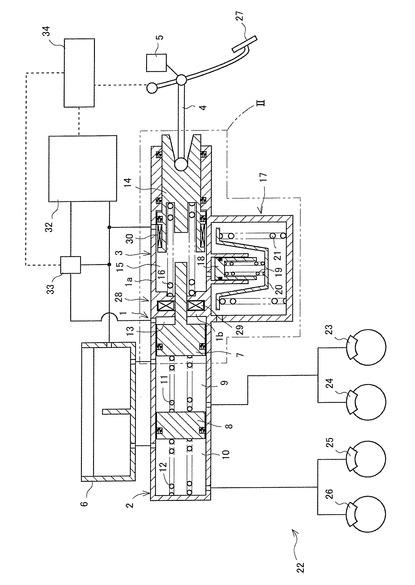
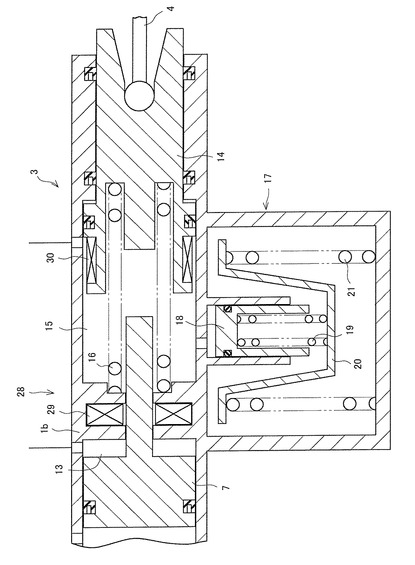
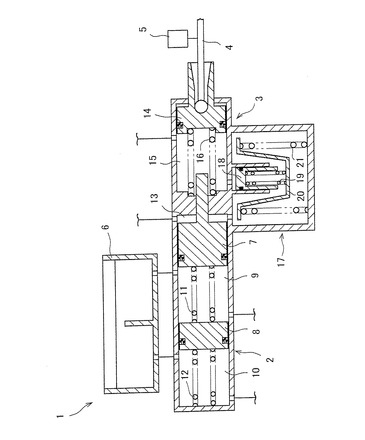
図1は本発明に係るストロークシミュレータの実施の形態の一例を有するマスタシリンダ、およびこのマスタシリンダを用いたブレーキシステムを模式的に示す図である。また、図2は図1におけるII部の部分拡大図である。なお、前述の図5に示すストロークシミュレータを有するマスタシリンダの構成要素と同じ本発明の構成要素には、同じ符号を付すことでそれらの詳細な説明は省略する。
【0031】
図1および図2に示すように、この例のブレーキシステム22にはマスタシリンダ1が用いられる。このマスタシリンダ1のタンデムマスタシリンダ部2では、プライマリ液圧室9が一方の系統のブレーキシリンダ23,24に連通しているとともに、セカンダリ液
圧室10が他方の系統のブレーキシリンダ25,26に連通している。
また、入力軸4にはブレーキペダル27が連結されている。運転者がブレーキペダル27を踏み込むことで、入力軸4が前進するようになっている。
【0032】
更に、マスタシリンダ1のストロークシミュレータであるペダル感覚シミュレータ部3は、入力軸4の作動力を補助する補助動力部28を有する。この例の補助動力部28は、マスタシリンダ1のハウジング1aの隔壁1bに固定された電磁石29と、シミュレータ作動ピストン14に配設された永久磁石30とを有する。永久磁石30はS極の磁石であり、シミュレータ作動液圧室15内に位置するシミュレータ作動ピストン14に配設される。
【0033】
そして、入力軸4の前進ストローク時に電磁石29が永久磁石30のS極と異極のN極に励磁されることで、電磁石29と永久磁石30との間に吸引力が作用する。すると、シミュレータ作動ピストン14はこの吸引力による補助動力が作用されてその前進ストローク作動が補助される。これにより、入力軸4の前進ストローク時に電磁石29と永久磁石30による補助動力で入力軸4の前進ストローク作動が補助される。したがって、初期の小さい入力で入力軸4が前進ストローク作動する。すなわち、初期の小さいブレーキペダル踏力でブレーキペダル27が踏み込みストロークする。
【0034】
また、入力軸4の後退(戻り)ストローク時に電磁石29が永久磁石30のS極と同極のS極に励磁されることで、電磁石29と永久磁石30との間に反発力が作用する。すると、シミュレータ作動ピストン14はこの反発力による補助動力が作用されてその後退ストローク作動が補助される。これにより、入力軸4の後退ストローク時に電磁石29と永久磁石30による補助動力で入力軸4の後退ストローク作動が補助される。したがって、小さい後退力で入力軸4が後退ストローク作動する。すなわち、ブレーキペダル27は滑らかにかつ確実に戻りストロークする。
【0035】
このように入力軸4の前進ストローク開始時に電磁石29と永久磁石30との間の吸引力が補助動力としてシミュレータ作動ピストン14に作用することで、ペダル感覚シミュレータ部3の作動開始荷重が、図5に示す従来のペダル感覚シミュレータ部3の作動開始荷重より低減する。また、入力軸4の前進ストローク途中で電磁石29と永久磁石30との間の吸引力が補助動力としてシミュレータ作動ピストン14に作用することで、ペダル感覚シミュレータ部3の作動荷重が、図5に示す従来のペダル感覚シミュレータ部3の作
動荷重より低減する。
【0036】
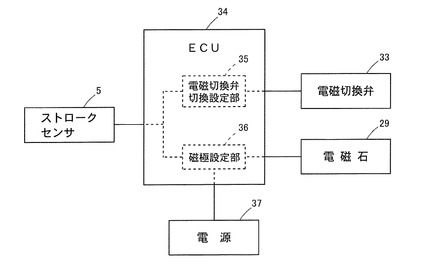
図1に示すように、更にこの例のブレーキシステム22は、動力源32、電磁切換弁33、および制御部(ECU)34を備えている。動力源32は作動液を動力室13に供給する。また、図3に示すようにECU34は電磁切換弁切換設定部35および磁極設定部36を有する。更に、ECU34の電磁切換弁切換設定部35および磁極設定部36にはストロークセンサ5が接続される。更に、電磁切換弁切換設定部35には電磁切換弁33が接続されるとともに、磁極設定部36には電磁石29および電源37がそれぞれ接続される。
【0037】
そして、ECU34には、ストロークセンサ5で検出されたシミュレータ作動ピストン14のストローク信号(つまり、入力軸4のストローク信号、ブレーキペダル27の踏み込みストローク信号)が入力される。ECU34の電磁切換弁切換設定部35は、ストロークセンサ5からのストローク信号がないと判断したときは、電磁切換弁33を作動しない。これにより、動力室13が動力源32から遮断されリザーバ6に連通される。また、ECU34の電磁切換弁切換設定部35は、ストロークセンサ5からのストローク信号が前進ストローク信号であると判断したときは、動力室13がリザーバ6から遮断され動力源32に連通されるように電磁切換弁33を切換作動する。更に、ECU34の電磁切換弁切換設定部35は、ブレーキペダル27が踏み込まれた後、ペダル踏み込みストロークが停止したと判断したときは、動力室13が動力源32およびリザーバ6のいずれからも遮断されるように電磁切換弁33を切換作動する。更に、ECU34の電磁切換弁切換設定部35は、ストロークセンサ5からのストローク信号が後退ストローク信号であると判断したときは、動力室13が動力源32から遮断されリザーバ6に連通されるように電磁切換弁33を切換作動する。
【0038】
一方、この例のブレーキシステム22では、電磁石29の磁極は一例として入力軸4の前進ストローク時にはN極に設定されるとともに、入力軸4の戻りストローク時にはS極に設定される。その場合、電磁石29は、入力軸4がストロークしなく非作動位置にあるときは、非励磁にされるとともに、入力軸4の前進ストローク中にストローク停止した時には停止時での磁極つまりN極に保持され、また、入力軸4の戻りストローク中にストローク停止した時には停止時での磁極つまりS極に保持される。なお、電磁石29の磁極の設定はこれに限定されることはなく,種々任意に設定可能である。以下、この例のブレーキシステム22の説明では、前述のとおりに磁石29は磁極が設定されるものとする。
すなわち、ECU34の磁極設定部36は、ストロークセンサ5からのストローク信号がない(ストローク信号が0;入力軸4が非作動状態;ブレーキペダル27が踏み込まれていない状態)と判断したときは、電磁石29を電源37から遮断してこの電磁石29に通電(電力供給)しない。したがって、電磁石29は非励磁に設定される。また、ECU34の磁極設定部36は、ストロークセンサ5からのストローク信号が前進ストローク信号であると判断したときは、電磁石29を電源37に接続しこの電磁石29がN極に励磁されるように通電(電力供給)する。更に、ECU34の磁極設定部36は、ストロークセンサ5からのストローク信号が戻りストローク信号であると判断したときは、電磁石29を電源37に接続しこの電磁石29がS極に励磁されるように通電する。更に、ECU34の磁極設定部36は、ストロークセンサ5からのストローク信号が出力された後、一定値に保持されて変化しない(つまり、入力軸4が前進ストローク中にストローク停止した状態である)と判断したときは、電磁石29の磁極をそのときの磁極つまりN極に保持する。
【0039】
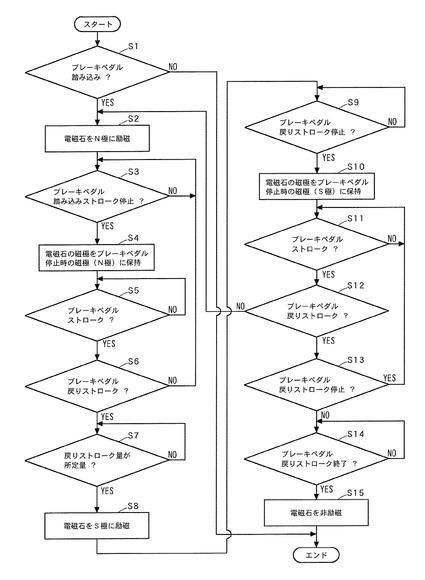
次に、この例のストロークシミュレータの電磁石の通電制御について説明する。図4は、この電磁石の通電制御を行うためのフローを示す図である。
図4に示すように、ステップS1においてブレーキペダル27が踏み込まれたか否かが
判断される。ブレーキペダル27が踏み込まれていないと判断されると、電磁石の通電制御は終了する。すなわち、マスタシリンダ1の入力軸4bの非作動(ストロークしない)時は、電磁石29に必要な電力が供給されず(通電されず)、電磁石29は非励磁となる。ステップS1でブレーキペダル27が踏み込まれた(つまり、入力軸4bが前進ストロークした)と判断されると、ステップS2においてブレーキペダル27の踏み込みストロークにより電磁石29に必要な電力が供給され(通電され)、電磁石29はN極に励磁される。したがって、電磁石29と永久磁石30との間に吸引力が発生する。次に、ステップS3においてブレーキペダル27の踏み込みストロークが停止されたか否かが判断される。ブレーキペダル27の踏み込みストロークが停止されていないと判断されると、このステップS3の処理が繰り返される。このとき、電磁石29の磁極はN極に保持される。
【0040】
ステップS3でストロークセンサ5からストローク信号が一定値に保持されて変化しないことから、ブレーキペダル27が踏み込みストロークが停止された(つまり、入力軸4bが前進ストローク中にストローク停止した)と判断されると、ブレーキペダル27がそのときの踏み込み位置に保持されるとともに、ステップS4において電磁石29はストローク停止した時の磁極、つまりN極に保持される。次に、ステップS5においてブレーキペダル27がストロークしたか否かが判断される。ブレーキペダル27がストロークしないと判断されると、このステップS5の処理が繰り返される。このとき、電磁石29は依然としてN極に保持されている。ステップS5でブレーキペダル27がストロークしたと判断されると、ステップS6においてブレーキペダル27のストロークが戻りストロークであるか否かが判断される。ブレーキペダル27のストロークが戻りストロークではないと判断される、つまり踏み込みストロークであると判断されると、ステップS3の処理に移行し、このステップS3以降の処理が繰り返される。したがって、電磁石29の磁極はN極に保持されている。
【0041】
ステップS6でブレーキペダル27のストロークが戻りストロークであると判断されると、ステップS7においてこの戻りストローク量が予め設定された所定量以上であるか否かが判断される。戻りストローク量が所定量以上でないと判断されると、このステップS7の処理が繰り返される。ステップS7で戻りストローク量が所定量以上であると判断されると、ステップS8においてブレーキペダル27の戻りストロークにより電磁石29に必要な電力が供給され、電磁石29はS極に励磁される。したがって、電磁石29と永久磁石30との間に反発力が発生する。
【0042】
次に、ステップS9においてブレーキペダル27の戻りストロークが停止したか否かが判断される。ブレーキペダル27の戻りストロークが停止されていないと判断されると、このステップS9の処理が繰り返される。このとき、電磁石29の磁極はS極に保持される。ステップS9でブレーキペダル27の戻りストロークが停止された(つまり、入力軸4bが戻りストローク中にストローク停止した)と判断されると、ブレーキペダル27がそのときの踏み込み位置に保持されるとともに、ステップS10において電磁石29はストローク停止した時の磁極、つまりS極に保持される。次に、ステップS11においてブレーキペダル27がストロークしたか否かが判断される。ブレーキペダル27がストロークしないと判断されると、このステップS11の処理が繰り返される。このとき、電磁石29は依然としてS極に保持される。ステップS11でブレーキペダル27がストロークしたと判断されると、ステップS12においてブレーキペダル27のストロークが戻りストロークであるか否かが判断される。ブレーキペダル27のストロークが戻りストロークではないと判断される、つまり踏み込みストロークであると判断されると、ステップS2の処理に移行し、このステップS2以降の処理が繰り返される。したがって、電磁石29はN極に励磁される。
【0043】
ステップS12でブレーキペダル27のストロークが戻りストロークであると判断され
ると、ステップS13においてブレーキペダル27の戻りストロークが停止したか否かが判断される。ブレーキペダル27の戻りストロークが停止されたと判断されると、ステップS11の処理に移行し、このステップS11の処理以降の各処理が行われる。ステップS13でブレーキペダル27の戻りストロークが停止されていないと判断されると、ステップS14においてブレーキペダル27の戻りストロークが終了したか否かが判断される、つまりブレーキペダル27のストローク信号が0であるか否かが判断される。ブレーキペダル27の戻りストロークが終了した、つまりブレーキペダル27のストローク信号が0であると判断されると、ステップS15において電磁石29へ電力が供給されなく、電磁石29は非励磁に設定される。こうして、この例のペダル感覚シミュレータ部3における電磁石29の通電制御が終了する。
【0044】
この例のペダル感覚シミュレータ部3、これを有するマスタシリンダ1、およびブレーキシステム22によれば、少なくともペダル感覚シミュレータ部3の作動開始時に、補助動力部28の電磁石29によりシミュレータ作動ピストン14を吸引することで、シミュレータ作動ピストン14にその作動方向に補助動力を加えている。したがって、シミュレータ作動ピストン14は前述の各スプリング16,19,21を撓ませながら作動させるようにしても、ペダル感覚シミュレータ部3の作動開始時に、シミュレータ作動ピストン14が作動開始する力を小さくすることができる。これにより、ペダル感覚シミュレータ部3の作動開始時には入力軸4をより一層小さな入力で前進ストローク(作動)させることができる。その結果、ブレーキペダル27をより小さなペダル踏力で踏み込みストロークさせることが可能となり、ペダル感覚シミュレータ部3のストロークシミュレーション機能の作動開始をより一層スムーズに行うことができる。
【0045】
また、入力軸4の前進ストローク時および入力軸4の後退ストローク時に、それぞれ電磁石29への通電量を制御して電磁石29と永久磁石30との間の吸引力および反発力を適宜制御することで、ペダル感覚シミュレータ部3にヒステリシスを持たせることができる。その場合、電磁石29に対する通電制御を容易に行うことができるので、容易に所望のヒステリシスを得ることができる。更に、電磁石29への通電量を制御することで、入力軸4の入力つまりペダル踏力を可変にできる。これにより、ブレーキペダル27のペダル踏力の設定をユーザの要望に応じて柔軟に対応することが可能となる。
【0046】
更に、ペダル感覚シミュレータ部3のペダル感覚シミュレータカートリッジ17を廃止するとともにシミュレータ作動液圧室15を大気室にし、更に電磁石29と永久磁石30との間の吸引力でシミュレータ作動ピストン14がプライマリピストン7を押圧可能にすることで、必要時に自動的にブレーキが作動する自動ブレーキ機能や必要時にブレーキ力を補助するブレーキアシスト(BA)機能を発揮させることも可能となる。
【0047】
なお、本発明は前述の各例に限定されることはなく、種々の設計変更が可能となる。例えば前述の例では、シミュレータ作動ピストン14にS極の永久磁石30を配設しているが、シミュレータ作動ピストン14にN極の永久磁石30を配設することもできる。この場合には、電磁石29は前述の例と逆に、少なくとも入力軸4の前進ストローク開始時にはS極に励磁されるとともに入力軸4の後退ストローク開始時にはS極に励磁される。また、前述の例では入力軸4の前進ストロークのすべてにおいて電磁石29をN極に励磁するものとしているが、電磁石29は入力軸4の前進ストローク開始時のみN極に励磁することもできる。更に、補助動力部28は、少なくとも入力軸4の前進ストローク開始時に補助動力を入力軸4に前進方向に加えることができるものであれば、どのような補助動力部を用いることもできる。要は、本発明は特許請求の範囲に記載されて事項の範囲内で種々設計変更が可能である。
【産業上の利用可能性】
【0048】
本発明に係るストロークシミュレータ、マスタシリンダ、およびブレーキシステムは、それぞれ、ペダルの踏み込みに応じてシミュレートした反力を発生させるストロークシミュレータ、このストロークシミュレータを有するマスタシリンダ、およびこのマスタシリンダを用いたブレーキシステムに好適に利用可能である。
【符号の説明】
【0049】
1…マスタシリンダ、2…タンデムマスタシリンダ部、3…ペダル感覚シミュレータ部(ストロークシミュレータ)、4…入力軸、5…ストロークセンサ、6…リザーバタンク、7…プライマリピストン、8…セカンダリピストン、13…動力室、14…シミュレータ作動ピストン、15…シミュレータ作動液圧室、16…シミュレータ作動ピストンリターンスプリング、17…ペダル感覚シミュレータカートリッジ、18…第1反力シミュレータピストン、19…第1反力シミュレータスプリング、20…第2反力シミュレータピストン、21…第2反力シミュレータスプリング、22…ブレーキシステム、23,24,25,26…ブレーキシリンダ、27…ブレーキペダル、28…補助動力部、29…電磁石
、30…永久磁石、32…動力源、33…電磁切換弁、34…制御部(ECU)、35…電磁切換弁切換設定部、36…磁極設定部
【技術分野】
【0001】
本発明は、ブレーキシステム等に用いられ、ストロークに応じた反力を発生させるストロークシミュレータの技術分野、このストロークシミュレータを有するマスタシリンダの技術分野、およびこのマスタシリンダを用いたブレーキシステムの技術分野に関するものである。なお、本発明の明細書の記載において、前後方向の関係は、ブレーキペダルの踏み込み時に入力軸が移動する方向を「前」、ブレーキペダルの踏み込み解除時に入力軸が戻る方向を「後」とする。
【背景技術】
【0002】
乗用車等の自動車においては、ハイブリッド車や電気自動車の開発が進んでいる。これに伴い、自動車のブレーキシステムにおいては、回生ブレーキと摩擦ブレーキとを協調して用いられる回生協調ブレーキシステムが種々開発されている。この回生協調ブレーキシステムは、ブレーキペダルの踏み込みストロークを検出し、検出されたストロークに基づいて、制御部(Electric control unit: ECU)が回生ブレーキによるブレーキ力と摩擦ブレーキによるブレーキ力とを演算し、演算されたブレーキ力で自動車にブレーキがかけられる。
【0003】
このような回生協調ブレーキシステムにおいては、制御部がブレーキペダルの踏み込みストロークに基づいてブレーキ力を決定するため、ブレーキペダルの踏み込みストロークに応じた反力が運転者に伝達されない。そこで、運転者がブレーキペダルの踏み込みストロークに応じた反力を認識可能にするため、ペダル感覚シミュレータ部を有するマスタシリンダが提案されている(例えば、特許文献1参照)。
【0004】
図5は、この特許文献1に記載されているペダル感覚シミュレータ部を有するマスタシリンダを模式的に示す図である。図中、1はマスタシリンダ、2は摩擦ブレーキのブレーキ液圧を発生するタンデムマスタシリンダ部、3はタンデムマスタシリンダ部2に一体的に設けられたペダル感覚シミュレータ部(ストロークシミュレータ)、4はブレーキペダル(図5には不図示)の踏み込みに応じてストロークする入力軸、5は入力軸4のストロークを検出するストロークセンサ、6はブレーキ液を貯留するリザーバタンクである。
【0005】
タンデムマスタシリンダ部2は、従来周知のタンデムマスタシリンダと同様に、プライマリピストン7、セカンダリピストン8、プライマリピストン7とセカンダリピストン8で区画されるプライマリ液圧室9、セカンダリピストン8で区画されるセカンダリ液圧室10、プライマリピストン7を常時非作動位置の方へ付勢するプライマリスプリング11、セカンダリピストン8を常時非作動位置の方へ付勢するセカンダリスプリング12を有する。プライマリ液圧室9は一方のブレーキ系統のブレーキシリンダ(図5には不図示)
に常時連通するとともに、図示のプライマリピストン7の非作動位置でリザーバタンク6に連通し、かつプライマリピストン7が前進するとリザーバタンク6から遮断されて、プライマリ液圧室9にブレーキ液圧が発生される。セカンダリ液圧室10は他方のブレーキ系統のブレーキシリンダ(図5には不図示)に常時連通するとともに、図示のセカンダリ
ピストン8の非作動位置でリザーバタンク6に連通し、かつセカンダリピストン8が前進するとリザーバタンク6から遮断されて、セカンダリ液圧室10にブレーキ液圧が発生される。
【0006】
更に、タンデムマスタシリンダ部2は、プライマリピストン7とシリンダ壁との間に動力室13を有する。この動力室13には、ブレーキ作動時に図示しない動力源から作動液
が供給される。その場合、作動液は、動力室13の液圧が制御部で演算された摩擦ブレーキによるブレーキ力に応じた液圧となるように供給される。
【0007】
ペダル感覚シミュレータ部3は、入力軸4により作動されるシミュレータ作動ピストン14、シミュレータ作動ピストン14の作動によってシミュレータ作動液圧が発生するシミュレータ作動液圧室15、シミュレータ作動ピストン14を常時非作動位置の方へ付勢するコイルばねからなるシミュレータ作動ピストンリターンスプリング16、およびペダル感覚シミュレータカートリッジ17を有する。また、ペダル感覚シミュレータカートリッジ17は、シミュレータ作動液圧室15のシミュレータ作動液圧が作用される第1反力シミュレータピストン18(本発明の反力シミュレータ部材に相当)、第1反力シミュレータピストン18を常時非作動位置の方へ付勢する第1反力シミュレータスプリング19(本発明の反力シミュレータ部材に相当)、第1反力シミュレータスプリング19を支持する第2反力シミュレータピストン20(本発明の反力シミュレータ部材に相当)、第2反力シミュレータピストン20を常時非作動位置の方へ付勢する第2反力シミュレータスプリング21(本発明の反力シミュレータ部材に相当)を有する。
【0008】
このペダル感覚シミュレータ部3においては、ブレーキペダルが踏み込まれない非作動時には、シミュレータ作動ピストン14は図5に示す非作動位置にある。この状態では、シミュレータ作動液圧室15はリザーバタンク6に連通し、シミュレータ作動液圧室15内はシミュレータ作動液圧が発生しなく大気圧となっている。したがって、第1反力シミュレータピストン18および第2反力シミュレータピストン20は図5に示す非作動位置にある。
【0009】
そして、ブレーキペダルが踏み込まれると、入力軸4が前進ストローク(図5において左動)するので、シミュレータ作動ピストン14がシミュレータ作動ピストンリターンスプリング16を弾性的に撓ませながら前進(作動)する。シミュレータ作動ピストン14の作動でシミュレータ作動液圧室15がリザーバタンク6から遮断されると、シミュレータ作動液圧室15内にシミュレータ作動液圧が発生する。このシミュレータ作動液圧は第1反力シミュレータピストン18に作用する。シミュレータ作動液圧が所定の液圧に増大すると、このシミュレータ作動液圧により第1反力シミュレータピストン18は第1反力シミュレータスプリング19を押圧して弾性的に撓ませながら図5において下方へ移動(作動)するとともに、第1反力シミュレータピストン18の押圧力で第2反力シミュレータピストン20が第2反力シミュレータスプリング21を撓ませながら図5において下方へ移動(作動)する。これにより、第1および第2反力シミュレータスプリング19,2
1はそれらの撓み量に応じた力を第1反力シミュレータピストン18に反力として作用する。
【0010】
そして、シミュレータ作動液圧による第1反力シミュレータピストン18への作用力と第1反力シミュレータスプリング19による第1反力シミュレータピストン18への作用力とがバランスすると、第1および第2反力シミュレータピストン18,20の移動が停
止する。このとき、シミュレータ作動液圧室15内のシミュレータ作動液圧はブレーキペダルの踏み込みストロークに応じた液圧となる。そして、第1反力シミュレータピストン18の反力はシミュレータ作動液圧に変換されてシミュレータ作動ピストン14に作用し、更に反力はシミュレータ作動ピストン14から入力軸4を介してブレーキペダルに伝達される。これにより、運転者はブレーキペダルからブレーキペダルの踏み込みストロークに応じた反力を認識する。こうして、ペダル感覚シミュレータ部3はストロークシミュレータ機能を発揮する。
【0011】
このように構成されたペダル感覚シミュレータ部3におけるペダル感覚特性線図(つまり、ブレーキペダルのストロークSに対する反力Fの特性線図)は、図6に示す特性線図
となる。すなわち、ペダル感覚特性線図は、ペダル感覚シミュレータ部3の作動初期ではストロークの増大に対して反力が比較的小さく、ストロークが所定量大きくなると、ストロークの増大に対して反力が比較的大きくなるように湾曲した特性曲線を描く。
【0012】
一方、このマスタシリンダ1においては、ブレーキペダルが踏み込まれない非作動時には、タンデムマスタシリンダ部2およびペダル感覚シミュレータ部3はともに図5に示す非作動状態にある。すなわち、動力室13に動力源から作動液が供給されなく、プライマリピストン7およびセカンダリピストン8はともに図5に示す非作動位置にある。したがってプライマリ液圧室9およびセカンダリ液圧室10はともにリザーバタンク6に連通し、プライマリ液圧室9およびセカンダリ液圧室10内にはブレーキ液圧は発生していない。また、シミュレータ作動液圧室15はリザーバタンク6に連通し、シミュレータ作動液圧室15内にはシミュレータ作動液圧は発生しない。
【0013】
また、ブレーキペダルが踏み込まれると、前述のように入力軸4が前進ストロークし、この入力軸4の前進ストロークがストロークセンサ5により検出される。図示しない制御部は、ストロークセンサ5からの入力軸4のストローク(つまり、ブレーキペダルの踏み込みストローク)に基づいて動力源を駆動制御する。これにより、動力源から作動液が動力室13に供給され、プライマリピストン7およびセカンダリピストン8が前進する。すると、プライマリ液圧室9およびセカンダリ液圧室10がともにリザーバタンク6から遮断されて、プライマリ液圧室9およびセカンダリ液圧室10内にブレーキ液圧が発生する。これらのブレーキ液圧がそれぞれ2系統の対応するブレーキシリンダに供給され、自動車の対応する車輪にブレーキがかけられる。
【0014】
動力室13内の作動液圧がブレーキペダルの踏み込みストロークに対応した液圧となると、制御部は動力源を停止する。すると、プライマリピストン7およびセカンダリピストン8がともに停止し、プライマリ液圧室9およびセカンダリ液圧室10内のブレーキ液圧はともにブレーキペダルの踏み込みストロークに対応した液圧となる。すなわち、ブレーキペダルの踏み込みストロークに対応したブレーキ力でブレーキが車輪にかけられる。
【0015】
このとき、前述のようにペダル感覚シミュレータ部3は、ストロークシミュレータ機能によりブレーキペダルの踏み込みストロークに対応した反力をブレーキペダルに伝達する。したがって、運転者はこの反力を認識して、ブレーキペダルの踏み込みストロークに対応したブレーキ力でブレーキが車輪にかけられることを感知する。
【0016】
ブレーキペダルが解放されると、入力軸4が後方(非作動位置の方)へストロークし、この入力軸4のストロークがストロークセンサ5により検出される。制御部は、ストロークセンサ5で検出されたストロークに基づいて図示しない制御弁を制御し、動力室13内の作動液をリザーバタンク6に排出する。これにより、動力室13内の液圧が低下し、プライマリピストン7およびセカンダリピストン8がそれぞれプライマリスプリング11およびセカンダリスプリング12の付勢力で後退する。動力室13内の液圧が大気圧となると、プライマリピストン7およびセカンダリピストン8がともに図5に示す非作動位置となり、車輪のブレーキが解除する。
【0017】
一方、入力軸4が後方へストロークすることで、シミュレータ作動ピストンリターンスプリング16の付勢力でシミュレータ作動ピストン14が後退する。そして、シミュレータ作動ピストン14が非作動位置近傍になると、シミュレータ作動液圧室15がリザーバタンク6に連通し、シミュレータ作動液圧室15内のシミュレータ作動液圧が低下する。シミュレータ作動ピストン14が図5に示す非作動位置になった状態では、シミュレータ作動液圧室15の液圧は大気圧となる。これにより、第1反力シミュレータピストン18および第2反力シミュレータピストン20もともに図5に示す非作動位置となる。なお、
各構成要素に用られている用語および符号は、いずれも特許文献1に記載された用語および符号と同じ用語および符号ではない。
【先行技術文献】
【特許文献】
【0018】
【特許文献1】特許第4510388号公報。
【発明の概要】
【発明が解決しようとする課題】
【0019】
ところで、特許文献1に記載のペダル感覚シミュレータ部3は、シミュレータ作動ピストンリターンスプリング16、第1反力シミュレータスプリング19、および第2反力シミュレータスプリング21の複数のスプリングを有している。一方、ペダル感覚シミュレータ部3が作動開始するためには、シミュレータ作動ピストン14が作動する必要があるが、シミュレータ作動ピストン14はこれらの複数のスプリングを撓ませながら作動しなければならない。このため、ペダル感覚シミュレータ部3の作動開始時に、シミュレータ作動ピストン14が作動開始する力が大きくなる。したがって、ペダル感覚シミュレータ部3の作動開始時には入力軸4が大きな入力を加える必要があるため、大きなペダル踏力が必要となる。その結果、ストロークシミュレーション機能の作動開始をスムーズに行うことが難しいという問題が考えられる。
【0020】
本発明はこのような事情に鑑みてなされたものであって、その目的は、作動開始時により一層小さな入力で入力軸を作動開始させることができるようにして、ストロークシミュレーション機能の作動開始をより一層スムーズに行うことができるストロークシミュレータ、このストロークシミュレータを有するマスタシリンダ、およびこのマスタシリンダを用いたブレーキシステムを提供することである。
【課題を解決するための手段】
【0021】
前述の課題を解決するために、本発明に係るストロークシミュレータは、入力が加えられて作動する入力軸と、前記入力軸により作動されるシミュレータ作動ピストンと、前記シミュレータ作動ピストンを非作動位置の方向に付勢するシミュレータ作動ピストンリターンスプリングと、前記シミュレータ作動ピストンの作動により、前記入力軸の入力に基づいた反力を前記シミュレータ作動ピストンに出力する反力シミュレータ部材と、少なくとも前記入力軸の作動開始時に補助動力を前記シミュレータ作動ピストンに前記シミュレータ作動ピストンの作動方向に加える補助動力部とを有することを特徴としている。
【0022】
また、本発明に係るストロークシミュレータは、前記電磁石に対する通電(電力供給)を制御する制御部を有し、前記補助動力部が、ハウジングに配設された電磁石と前記シミュレータ作動ピストンに配設されるとともにN極およびS極のいずれか一方の磁極に励磁された磁石とを有し、前記制御部が、少なくとも前記入力軸の作動開始時に前記電磁石がN極およびS極のいずれか他方の磁極に励磁されるように前記電磁石に対し通電制御することで、前記電磁石と前記磁石との間の吸引力により前記補助動力を前記シミュレータ作動ピストンに加えることを特徴としている。
【0023】
更に、本発明に係るストロークシミュレータは、前記補助動力部が、前記入力軸の前進ストローク時に補助動力を前記シミュレータ作動ピストンに前記シミュレータ作動ピストンの前進方向に加えるとともに、前記入力軸の後退ストローク時に補助動力を前記シミュレータ作動ピストンに前記シミュレータ作動ピストンの後退方向に加えることを特徴としている。
【0024】
更に、本発明に係るストロークシミュレータは、前記電磁石に対する通電を制御する制
御部を有し、前記補助動力部が、ハウジングに配設された電磁石と前記シミュレータ作動ピストンに配設されるとともにN極およびS極のいずれか一方の磁極に励磁された磁石とを有し、前記制御部が、少なくとも前記入力軸の作動開始時に前記電磁石がN極およびS極のいずれか他方の磁極に励磁されるように前記電磁石に対し通電制御することで、前記補助動力部が前記電磁石と前記磁石との間の吸引力により前記補助動力を前記シミュレータ作動ピストンに加え、前記制御部が、前記入力軸の後退ストローク時に前記電磁石が前記シミュレータ作動ピストンに配設された前記磁石の磁極と同じ磁極に励磁されるように前記電磁石に対し通電制御することで、前記補助動力部が前記電磁石と前記磁石との間の反発力により前記補助動力を前記シミュレータ作動ピストンに加えることを特徴としている。
【0025】
更に、本発明に係るマスタシリンダは、入力軸の入力に基づいた反力を出力するストロークシミュレータと前記入力軸の入力に基づいた液圧を発生するマスタシリンダピストンとを有するマスタシリンダにおいて、前記ストロークシミュレータが、前述の本発明のストロークシミュレータのいずれか1つであることを特徴としている。
【0026】
更に、本発明に係るブレーキシステムは、ブレーキペダルと、前記ブレーキペダルの踏み込みで作動して前記ブレーキペダルの踏み込みに基づいたブレーキ液圧を発生するマスタシリンダと、前記マスタシリンダで発生された前記ブレーキ液圧でブレーキ力を発生するブレーキシリンダとを備えるブレーキシステムにおいて、前記マスタシリンダが、前述のマスタシリンダであることを特徴としている。
【発明の効果】
【0027】
このように構成された本発明に係るストロークシミュレータ、これを有するマスタシリンダ、およびブレーキシステムによれば、少なくともストロークシミュレータの作動開始時に、補助動力部によりシミュレータ作動ピストンシミュレータ作動ピストンにその作動方向に補助動力を加えている。したがって、シミュレータ作動ピストンはストロークシミュレータに配設される複数のスプリングを撓ませながら作動させるようにしても、ストロークシミュレータの作動開始時に、シミュレータ作動ピストンが作動開始する力を小さくすることができる。これにより、ストロークシミュレータの作動開始時には入力軸をより一層小さな入力で前進ストローク(作動)させることができる。その結果、ストロークシミュレータを有するマスタシリンダを用いたブレーキシステムによれば、ブレーキペダルをより小さなペダル踏力で踏み込みストロークさせることが可能となり、ストロークシミュレータのストロークシミュレーション機能の作動開始をより一層スムーズに行うことができる。
【0028】
また、補助動力部は、ハウジングに配設された電磁石とシミュレータ作動ピストンに配設された磁石とを有する。そして、入力軸の前進ストローク時および入力軸の後退ストローク時に、それぞれ電磁石への通電量を制御して電磁石と磁石との間の吸引力および反発力を適宜制御することで、ストロークシミュレータにヒステリシスを持たせることができる。その場合、電磁石に対する通電制御を容易に行うことができるので、容易に所望のヒステリシスを得ることができる。更に、電磁石への通電量を制御することで、入力軸の入力つまりペダル踏力を可変にできる。これにより、ブレーキペダルのペダル踏力の設定をユーザの要望に応じて柔軟に対応することが可能となる。
【図面の簡単な説明】
【0029】
【図1】本発明に係るストロークシミュレータの実施の形態の一例を有するマスタシリンダ、およびこのマスタシリンダを用いたブレーキシステムを模式的に示す図である。
【図2】図1におけるII部の部分拡大図である。
【図3】図1に示す例のストロークシミュレータの電磁石の通電制御について説明する図である。
【図4】電磁石の通電制御を行うためのフローを示す図である。
【図5】特許文献1に記載されている従来のペダル感覚シミュレータ部を有するマスタシリンダを模式的に示す図である。
【図6】図5に示すペダル感覚シミュレータ部のペダル感覚特性線図である。
【発明を実施するための形態】
【0030】
以下、図面を用いて本発明を実施するための形態について説明する。
図1は本発明に係るストロークシミュレータの実施の形態の一例を有するマスタシリンダ、およびこのマスタシリンダを用いたブレーキシステムを模式的に示す図である。また、図2は図1におけるII部の部分拡大図である。なお、前述の図5に示すストロークシミュレータを有するマスタシリンダの構成要素と同じ本発明の構成要素には、同じ符号を付すことでそれらの詳細な説明は省略する。
【0031】
図1および図2に示すように、この例のブレーキシステム22にはマスタシリンダ1が用いられる。このマスタシリンダ1のタンデムマスタシリンダ部2では、プライマリ液圧室9が一方の系統のブレーキシリンダ23,24に連通しているとともに、セカンダリ液
圧室10が他方の系統のブレーキシリンダ25,26に連通している。
また、入力軸4にはブレーキペダル27が連結されている。運転者がブレーキペダル27を踏み込むことで、入力軸4が前進するようになっている。
【0032】
更に、マスタシリンダ1のストロークシミュレータであるペダル感覚シミュレータ部3は、入力軸4の作動力を補助する補助動力部28を有する。この例の補助動力部28は、マスタシリンダ1のハウジング1aの隔壁1bに固定された電磁石29と、シミュレータ作動ピストン14に配設された永久磁石30とを有する。永久磁石30はS極の磁石であり、シミュレータ作動液圧室15内に位置するシミュレータ作動ピストン14に配設される。
【0033】
そして、入力軸4の前進ストローク時に電磁石29が永久磁石30のS極と異極のN極に励磁されることで、電磁石29と永久磁石30との間に吸引力が作用する。すると、シミュレータ作動ピストン14はこの吸引力による補助動力が作用されてその前進ストローク作動が補助される。これにより、入力軸4の前進ストローク時に電磁石29と永久磁石30による補助動力で入力軸4の前進ストローク作動が補助される。したがって、初期の小さい入力で入力軸4が前進ストローク作動する。すなわち、初期の小さいブレーキペダル踏力でブレーキペダル27が踏み込みストロークする。
【0034】
また、入力軸4の後退(戻り)ストローク時に電磁石29が永久磁石30のS極と同極のS極に励磁されることで、電磁石29と永久磁石30との間に反発力が作用する。すると、シミュレータ作動ピストン14はこの反発力による補助動力が作用されてその後退ストローク作動が補助される。これにより、入力軸4の後退ストローク時に電磁石29と永久磁石30による補助動力で入力軸4の後退ストローク作動が補助される。したがって、小さい後退力で入力軸4が後退ストローク作動する。すなわち、ブレーキペダル27は滑らかにかつ確実に戻りストロークする。
【0035】
このように入力軸4の前進ストローク開始時に電磁石29と永久磁石30との間の吸引力が補助動力としてシミュレータ作動ピストン14に作用することで、ペダル感覚シミュレータ部3の作動開始荷重が、図5に示す従来のペダル感覚シミュレータ部3の作動開始荷重より低減する。また、入力軸4の前進ストローク途中で電磁石29と永久磁石30との間の吸引力が補助動力としてシミュレータ作動ピストン14に作用することで、ペダル感覚シミュレータ部3の作動荷重が、図5に示す従来のペダル感覚シミュレータ部3の作
動荷重より低減する。
【0036】
図1に示すように、更にこの例のブレーキシステム22は、動力源32、電磁切換弁33、および制御部(ECU)34を備えている。動力源32は作動液を動力室13に供給する。また、図3に示すようにECU34は電磁切換弁切換設定部35および磁極設定部36を有する。更に、ECU34の電磁切換弁切換設定部35および磁極設定部36にはストロークセンサ5が接続される。更に、電磁切換弁切換設定部35には電磁切換弁33が接続されるとともに、磁極設定部36には電磁石29および電源37がそれぞれ接続される。
【0037】
そして、ECU34には、ストロークセンサ5で検出されたシミュレータ作動ピストン14のストローク信号(つまり、入力軸4のストローク信号、ブレーキペダル27の踏み込みストローク信号)が入力される。ECU34の電磁切換弁切換設定部35は、ストロークセンサ5からのストローク信号がないと判断したときは、電磁切換弁33を作動しない。これにより、動力室13が動力源32から遮断されリザーバ6に連通される。また、ECU34の電磁切換弁切換設定部35は、ストロークセンサ5からのストローク信号が前進ストローク信号であると判断したときは、動力室13がリザーバ6から遮断され動力源32に連通されるように電磁切換弁33を切換作動する。更に、ECU34の電磁切換弁切換設定部35は、ブレーキペダル27が踏み込まれた後、ペダル踏み込みストロークが停止したと判断したときは、動力室13が動力源32およびリザーバ6のいずれからも遮断されるように電磁切換弁33を切換作動する。更に、ECU34の電磁切換弁切換設定部35は、ストロークセンサ5からのストローク信号が後退ストローク信号であると判断したときは、動力室13が動力源32から遮断されリザーバ6に連通されるように電磁切換弁33を切換作動する。
【0038】
一方、この例のブレーキシステム22では、電磁石29の磁極は一例として入力軸4の前進ストローク時にはN極に設定されるとともに、入力軸4の戻りストローク時にはS極に設定される。その場合、電磁石29は、入力軸4がストロークしなく非作動位置にあるときは、非励磁にされるとともに、入力軸4の前進ストローク中にストローク停止した時には停止時での磁極つまりN極に保持され、また、入力軸4の戻りストローク中にストローク停止した時には停止時での磁極つまりS極に保持される。なお、電磁石29の磁極の設定はこれに限定されることはなく,種々任意に設定可能である。以下、この例のブレーキシステム22の説明では、前述のとおりに磁石29は磁極が設定されるものとする。
すなわち、ECU34の磁極設定部36は、ストロークセンサ5からのストローク信号がない(ストローク信号が0;入力軸4が非作動状態;ブレーキペダル27が踏み込まれていない状態)と判断したときは、電磁石29を電源37から遮断してこの電磁石29に通電(電力供給)しない。したがって、電磁石29は非励磁に設定される。また、ECU34の磁極設定部36は、ストロークセンサ5からのストローク信号が前進ストローク信号であると判断したときは、電磁石29を電源37に接続しこの電磁石29がN極に励磁されるように通電(電力供給)する。更に、ECU34の磁極設定部36は、ストロークセンサ5からのストローク信号が戻りストローク信号であると判断したときは、電磁石29を電源37に接続しこの電磁石29がS極に励磁されるように通電する。更に、ECU34の磁極設定部36は、ストロークセンサ5からのストローク信号が出力された後、一定値に保持されて変化しない(つまり、入力軸4が前進ストローク中にストローク停止した状態である)と判断したときは、電磁石29の磁極をそのときの磁極つまりN極に保持する。
【0039】
次に、この例のストロークシミュレータの電磁石の通電制御について説明する。図4は、この電磁石の通電制御を行うためのフローを示す図である。
図4に示すように、ステップS1においてブレーキペダル27が踏み込まれたか否かが
判断される。ブレーキペダル27が踏み込まれていないと判断されると、電磁石の通電制御は終了する。すなわち、マスタシリンダ1の入力軸4bの非作動(ストロークしない)時は、電磁石29に必要な電力が供給されず(通電されず)、電磁石29は非励磁となる。ステップS1でブレーキペダル27が踏み込まれた(つまり、入力軸4bが前進ストロークした)と判断されると、ステップS2においてブレーキペダル27の踏み込みストロークにより電磁石29に必要な電力が供給され(通電され)、電磁石29はN極に励磁される。したがって、電磁石29と永久磁石30との間に吸引力が発生する。次に、ステップS3においてブレーキペダル27の踏み込みストロークが停止されたか否かが判断される。ブレーキペダル27の踏み込みストロークが停止されていないと判断されると、このステップS3の処理が繰り返される。このとき、電磁石29の磁極はN極に保持される。
【0040】
ステップS3でストロークセンサ5からストローク信号が一定値に保持されて変化しないことから、ブレーキペダル27が踏み込みストロークが停止された(つまり、入力軸4bが前進ストローク中にストローク停止した)と判断されると、ブレーキペダル27がそのときの踏み込み位置に保持されるとともに、ステップS4において電磁石29はストローク停止した時の磁極、つまりN極に保持される。次に、ステップS5においてブレーキペダル27がストロークしたか否かが判断される。ブレーキペダル27がストロークしないと判断されると、このステップS5の処理が繰り返される。このとき、電磁石29は依然としてN極に保持されている。ステップS5でブレーキペダル27がストロークしたと判断されると、ステップS6においてブレーキペダル27のストロークが戻りストロークであるか否かが判断される。ブレーキペダル27のストロークが戻りストロークではないと判断される、つまり踏み込みストロークであると判断されると、ステップS3の処理に移行し、このステップS3以降の処理が繰り返される。したがって、電磁石29の磁極はN極に保持されている。
【0041】
ステップS6でブレーキペダル27のストロークが戻りストロークであると判断されると、ステップS7においてこの戻りストローク量が予め設定された所定量以上であるか否かが判断される。戻りストローク量が所定量以上でないと判断されると、このステップS7の処理が繰り返される。ステップS7で戻りストローク量が所定量以上であると判断されると、ステップS8においてブレーキペダル27の戻りストロークにより電磁石29に必要な電力が供給され、電磁石29はS極に励磁される。したがって、電磁石29と永久磁石30との間に反発力が発生する。
【0042】
次に、ステップS9においてブレーキペダル27の戻りストロークが停止したか否かが判断される。ブレーキペダル27の戻りストロークが停止されていないと判断されると、このステップS9の処理が繰り返される。このとき、電磁石29の磁極はS極に保持される。ステップS9でブレーキペダル27の戻りストロークが停止された(つまり、入力軸4bが戻りストローク中にストローク停止した)と判断されると、ブレーキペダル27がそのときの踏み込み位置に保持されるとともに、ステップS10において電磁石29はストローク停止した時の磁極、つまりS極に保持される。次に、ステップS11においてブレーキペダル27がストロークしたか否かが判断される。ブレーキペダル27がストロークしないと判断されると、このステップS11の処理が繰り返される。このとき、電磁石29は依然としてS極に保持される。ステップS11でブレーキペダル27がストロークしたと判断されると、ステップS12においてブレーキペダル27のストロークが戻りストロークであるか否かが判断される。ブレーキペダル27のストロークが戻りストロークではないと判断される、つまり踏み込みストロークであると判断されると、ステップS2の処理に移行し、このステップS2以降の処理が繰り返される。したがって、電磁石29はN極に励磁される。
【0043】
ステップS12でブレーキペダル27のストロークが戻りストロークであると判断され
ると、ステップS13においてブレーキペダル27の戻りストロークが停止したか否かが判断される。ブレーキペダル27の戻りストロークが停止されたと判断されると、ステップS11の処理に移行し、このステップS11の処理以降の各処理が行われる。ステップS13でブレーキペダル27の戻りストロークが停止されていないと判断されると、ステップS14においてブレーキペダル27の戻りストロークが終了したか否かが判断される、つまりブレーキペダル27のストローク信号が0であるか否かが判断される。ブレーキペダル27の戻りストロークが終了した、つまりブレーキペダル27のストローク信号が0であると判断されると、ステップS15において電磁石29へ電力が供給されなく、電磁石29は非励磁に設定される。こうして、この例のペダル感覚シミュレータ部3における電磁石29の通電制御が終了する。
【0044】
この例のペダル感覚シミュレータ部3、これを有するマスタシリンダ1、およびブレーキシステム22によれば、少なくともペダル感覚シミュレータ部3の作動開始時に、補助動力部28の電磁石29によりシミュレータ作動ピストン14を吸引することで、シミュレータ作動ピストン14にその作動方向に補助動力を加えている。したがって、シミュレータ作動ピストン14は前述の各スプリング16,19,21を撓ませながら作動させるようにしても、ペダル感覚シミュレータ部3の作動開始時に、シミュレータ作動ピストン14が作動開始する力を小さくすることができる。これにより、ペダル感覚シミュレータ部3の作動開始時には入力軸4をより一層小さな入力で前進ストローク(作動)させることができる。その結果、ブレーキペダル27をより小さなペダル踏力で踏み込みストロークさせることが可能となり、ペダル感覚シミュレータ部3のストロークシミュレーション機能の作動開始をより一層スムーズに行うことができる。
【0045】
また、入力軸4の前進ストローク時および入力軸4の後退ストローク時に、それぞれ電磁石29への通電量を制御して電磁石29と永久磁石30との間の吸引力および反発力を適宜制御することで、ペダル感覚シミュレータ部3にヒステリシスを持たせることができる。その場合、電磁石29に対する通電制御を容易に行うことができるので、容易に所望のヒステリシスを得ることができる。更に、電磁石29への通電量を制御することで、入力軸4の入力つまりペダル踏力を可変にできる。これにより、ブレーキペダル27のペダル踏力の設定をユーザの要望に応じて柔軟に対応することが可能となる。
【0046】
更に、ペダル感覚シミュレータ部3のペダル感覚シミュレータカートリッジ17を廃止するとともにシミュレータ作動液圧室15を大気室にし、更に電磁石29と永久磁石30との間の吸引力でシミュレータ作動ピストン14がプライマリピストン7を押圧可能にすることで、必要時に自動的にブレーキが作動する自動ブレーキ機能や必要時にブレーキ力を補助するブレーキアシスト(BA)機能を発揮させることも可能となる。
【0047】
なお、本発明は前述の各例に限定されることはなく、種々の設計変更が可能となる。例えば前述の例では、シミュレータ作動ピストン14にS極の永久磁石30を配設しているが、シミュレータ作動ピストン14にN極の永久磁石30を配設することもできる。この場合には、電磁石29は前述の例と逆に、少なくとも入力軸4の前進ストローク開始時にはS極に励磁されるとともに入力軸4の後退ストローク開始時にはS極に励磁される。また、前述の例では入力軸4の前進ストロークのすべてにおいて電磁石29をN極に励磁するものとしているが、電磁石29は入力軸4の前進ストローク開始時のみN極に励磁することもできる。更に、補助動力部28は、少なくとも入力軸4の前進ストローク開始時に補助動力を入力軸4に前進方向に加えることができるものであれば、どのような補助動力部を用いることもできる。要は、本発明は特許請求の範囲に記載されて事項の範囲内で種々設計変更が可能である。
【産業上の利用可能性】
【0048】
本発明に係るストロークシミュレータ、マスタシリンダ、およびブレーキシステムは、それぞれ、ペダルの踏み込みに応じてシミュレートした反力を発生させるストロークシミュレータ、このストロークシミュレータを有するマスタシリンダ、およびこのマスタシリンダを用いたブレーキシステムに好適に利用可能である。
【符号の説明】
【0049】
1…マスタシリンダ、2…タンデムマスタシリンダ部、3…ペダル感覚シミュレータ部(ストロークシミュレータ)、4…入力軸、5…ストロークセンサ、6…リザーバタンク、7…プライマリピストン、8…セカンダリピストン、13…動力室、14…シミュレータ作動ピストン、15…シミュレータ作動液圧室、16…シミュレータ作動ピストンリターンスプリング、17…ペダル感覚シミュレータカートリッジ、18…第1反力シミュレータピストン、19…第1反力シミュレータスプリング、20…第2反力シミュレータピストン、21…第2反力シミュレータスプリング、22…ブレーキシステム、23,24,25,26…ブレーキシリンダ、27…ブレーキペダル、28…補助動力部、29…電磁石
、30…永久磁石、32…動力源、33…電磁切換弁、34…制御部(ECU)、35…電磁切換弁切換設定部、36…磁極設定部
【特許請求の範囲】
【請求項1】
入力が加えられて作動する入力軸と、
前記入力軸により作動されるシミュレータ作動ピストンと、
前記シミュレータ作動ピストンを非作動位置の方向に付勢するシミュレータ作動ピストンリターンスプリングと、
前記シミュレータ作動ピストンの作動により、前記入力軸の入力に基づいた反力を前記シミュレータ作動ピストンに出力する反力シミュレータ部材と、
少なくとも前記入力軸の作動開始時に補助動力を前記シミュレータ作動ピストンに前記シミュレータ作動ピストンの作動方向に加える補助動力部と
を有することを特徴とするストロークシミュレータ。
【請求項2】
前記電磁石に対する通電を制御する制御部を有し、
前記補助動力部は、ハウジングに配設された電磁石と前記シミュレータ作動ピストンに配設されるとともにN極およびS極のいずれか一方の磁極に励磁された磁石とを有し、
前記制御部は、少なくとも前記入力軸の作動開始時に前記電磁石がN極およびS極のいずれか他方の磁極に励磁されるように前記電磁石に対し通電制御することで、前記電磁石と前記磁石との間の吸引力により前記補助動力を前記シミュレータ作動ピストンに加えることを特徴とする請求項1に記載のストロークシミュレータ。
【請求項3】
前記補助動力部は、前記入力軸の前進ストローク時に補助動力を前記シミュレータ作動ピストンに前記シミュレータ作動ピストンの前進方向に加えるとともに、前記入力軸の後退ストローク時に補助動力を前記シミュレータ作動ピストンに前記シミュレータ作動ピストンの後退方向に加えることを特徴とする請求項1に記載のストロークシミュレータ。
【請求項4】
前記電磁石に対する通電を制御する制御部を有し、
前記補助動力部は、ハウジングに配設された電磁石と前記シミュレータ作動ピストンに配設されるとともにN極およびS極のいずれか一方の磁極に励磁された磁石とを有し、
前記制御部が、少なくとも前記入力軸の作動開始時に前記電磁石がN極およびS極のいずれか他方の磁極に励磁されるように前記電磁石に対し通電制御することで、前記補助動力部が前記電磁石と前記磁石との間の吸引力により前記補助動力を前記シミュレータ作動ピストンに加え、
前記制御部が、前記入力軸の後退ストローク時に前記電磁石が前記シミュレータ作動ピストンに配設された前記磁石の磁極と同じ磁極に励磁されるように前記電磁石に対し通電制御することで、前記補助動力部が前記電磁石と前記磁石との間の反発力により前記補助動力を前記シミュレータ作動ピストンに加えることを特徴とする請求項3に記載のストロークシミュレータ。
【請求項5】
入力軸の入力に基づいた反力を出力するストロークシミュレータと前記入力軸の入力に基づいた液圧を発生するマスタシリンダピストンとを有するマスタシリンダにおいて、
前記ストロークシミュレータは、請求項1ないし4のいずれか1項に記載のストロークシミュレータであることを特徴とするマスタシリンダ。
【請求項6】
ブレーキペダルと、前記ブレーキペダルの踏み込みで作動して前記ブレーキペダルの踏み込みに基づいたブレーキ液圧を発生するマスタシリンダと、前記マスタシリンダで発生された前記ブレーキ液圧でブレーキ力を発生するブレーキシリンダとを備えるブレーキシステムにおいて、
前記マスタシリンダは、請求項5に記載のマスタシリンダであることを特徴とするブレーキシステム。
【請求項1】
入力が加えられて作動する入力軸と、
前記入力軸により作動されるシミュレータ作動ピストンと、
前記シミュレータ作動ピストンを非作動位置の方向に付勢するシミュレータ作動ピストンリターンスプリングと、
前記シミュレータ作動ピストンの作動により、前記入力軸の入力に基づいた反力を前記シミュレータ作動ピストンに出力する反力シミュレータ部材と、
少なくとも前記入力軸の作動開始時に補助動力を前記シミュレータ作動ピストンに前記シミュレータ作動ピストンの作動方向に加える補助動力部と
を有することを特徴とするストロークシミュレータ。
【請求項2】
前記電磁石に対する通電を制御する制御部を有し、
前記補助動力部は、ハウジングに配設された電磁石と前記シミュレータ作動ピストンに配設されるとともにN極およびS極のいずれか一方の磁極に励磁された磁石とを有し、
前記制御部は、少なくとも前記入力軸の作動開始時に前記電磁石がN極およびS極のいずれか他方の磁極に励磁されるように前記電磁石に対し通電制御することで、前記電磁石と前記磁石との間の吸引力により前記補助動力を前記シミュレータ作動ピストンに加えることを特徴とする請求項1に記載のストロークシミュレータ。
【請求項3】
前記補助動力部は、前記入力軸の前進ストローク時に補助動力を前記シミュレータ作動ピストンに前記シミュレータ作動ピストンの前進方向に加えるとともに、前記入力軸の後退ストローク時に補助動力を前記シミュレータ作動ピストンに前記シミュレータ作動ピストンの後退方向に加えることを特徴とする請求項1に記載のストロークシミュレータ。
【請求項4】
前記電磁石に対する通電を制御する制御部を有し、
前記補助動力部は、ハウジングに配設された電磁石と前記シミュレータ作動ピストンに配設されるとともにN極およびS極のいずれか一方の磁極に励磁された磁石とを有し、
前記制御部が、少なくとも前記入力軸の作動開始時に前記電磁石がN極およびS極のいずれか他方の磁極に励磁されるように前記電磁石に対し通電制御することで、前記補助動力部が前記電磁石と前記磁石との間の吸引力により前記補助動力を前記シミュレータ作動ピストンに加え、
前記制御部が、前記入力軸の後退ストローク時に前記電磁石が前記シミュレータ作動ピストンに配設された前記磁石の磁極と同じ磁極に励磁されるように前記電磁石に対し通電制御することで、前記補助動力部が前記電磁石と前記磁石との間の反発力により前記補助動力を前記シミュレータ作動ピストンに加えることを特徴とする請求項3に記載のストロークシミュレータ。
【請求項5】
入力軸の入力に基づいた反力を出力するストロークシミュレータと前記入力軸の入力に基づいた液圧を発生するマスタシリンダピストンとを有するマスタシリンダにおいて、
前記ストロークシミュレータは、請求項1ないし4のいずれか1項に記載のストロークシミュレータであることを特徴とするマスタシリンダ。
【請求項6】
ブレーキペダルと、前記ブレーキペダルの踏み込みで作動して前記ブレーキペダルの踏み込みに基づいたブレーキ液圧を発生するマスタシリンダと、前記マスタシリンダで発生された前記ブレーキ液圧でブレーキ力を発生するブレーキシリンダとを備えるブレーキシステムにおいて、
前記マスタシリンダは、請求項5に記載のマスタシリンダであることを特徴とするブレーキシステム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−49369(P2013−49369A)
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願番号】特願2011−188903(P2011−188903)
【出願日】平成23年8月31日(2011.8.31)
【出願人】(000003333)ボッシュ株式会社 (510)
【Fターム(参考)】
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願日】平成23年8月31日(2011.8.31)
【出願人】(000003333)ボッシュ株式会社 (510)
【Fターム(参考)】
[ Back to top ]