
ストロークシミュレータおよびそれを用いた車両用ブレーキ装置
【課題】反力特性のストロークの速度依存性の影響を抑制できるストロークシミュレータを提供する。
【解決手段】ピストン2aの外周面とシリンダ2bとの間にシール部材2aeを配置し、ピストン本体2aaの外周面と両シール部材2aeおよびシリンダ2bの内壁面によって構成される空間内に機能性流体2eを配置する。そして、ピストン2aの移動と共に機能性流体2eも移動させられるようにする。このような構成において、ピストン2aとシリンダ2bとの間に配置した機能性流体2eの粘度を磁場もしくは電場によって制御し、シリンダ2bの内周面を対向面としたせん断抵抗に基づいてブレーキペダル1のストロークに対する反力を発生させる。
【解決手段】ピストン2aの外周面とシリンダ2bとの間にシール部材2aeを配置し、ピストン本体2aaの外周面と両シール部材2aeおよびシリンダ2bの内壁面によって構成される空間内に機能性流体2eを配置する。そして、ピストン2aの移動と共に機能性流体2eも移動させられるようにする。このような構成において、ピストン2aとシリンダ2bとの間に配置した機能性流体2eの粘度を磁場もしくは電場によって制御し、シリンダ2bの内周面を対向面としたせん断抵抗に基づいてブレーキペダル1のストロークに対する反力を発生させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、磁場または電場の変化に基づいて反力(抵抗力)を変化させることができるストロークシミュレータおよびそれを用いた車両用ブレーキ装置に関するものである。
【背景技術】
【0002】
従来、車両用ブレーキ装置において、ブレーキペダルの踏み込みに応じた反力を付与するために、ストロークシミュレータを備えたものが提案されている。
【0003】
例えば、特許文献1では、シリンダの内部に磁性流体を封入すると共に、シリンダ内に配置されたピストンとシリンダとの間に磁性流体が流動するオリフィスを備え、シリンダおよびピストンが作る磁気回路長がピストンのストローク量に応じて変化する構造のストロークシミュレータが提案されている。このストロークシミュレータでは、ピストンのストローク量に応じて磁気回路長が変化すると、オリフィス部に生じる磁場が変化することによって磁性流体の粘度が変化し、反力が変化する。これにより、ストロークシミュレータにより生成される反力の調整を行っている。
【0004】
また、特許文献2では、ブレーキバイワイヤシステムにおける電気的な失陥時に、シミュレータ内のスプリングが操作力の損失となることを防ぐために、失陥時に、電磁石によってシリンダ内に充填された磁性流体に磁力を作用させる車両用制動制御装置が提案されている。この車両用制動制御装置では、シリンダとピストンの間の連通溝、ピストンを貫通する連通孔、もしくは、シリンダの両端間のバイパスをオリフィスとして、そのオリフィス内を磁性流体が流動し難くなるようにしている。これにより、スプリングの変位を抑制し、スプリングが操作力の損失となることを防いでいる。
【0005】
さらに、特許文献3では、ストロークシミュレータの反力発生特性を簡単な構造で任意に制御できるブレーキバイワイヤシステムのブレーキ装置が提案されている。このブレーキ装置では、マスタシリンダ(以下、M/Cという)圧を磁性流体の液圧に変換し、オリフィスを介してスプリングを圧縮する構成において、磁場の強さを任意に変えることによって、ペダル反力を制御できるようにしている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2009−126327号公報
【特許文献2】特開2006−117117号公報
【特許文献3】特開2007−230402号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、上記特許文献1〜3のストロークシミュレータでは、いずれのものもオリフィスを流動する磁性流体の粘度を変化させることによってストロークに対する反力を変化させるようにしているため、反力特性のストローク速度依存性が大きくなる。すなわち、磁性流体がオリフィスを流動することを前提とした構造であるため、ストローク量が同じであったとしてもストローク速度によって反力特性が変化する。
【0008】
本発明は上記点に鑑みて、反力特性のストローク速度依存性の影響を抑制できるストロークシミュレータおよびそれを備えた車両用ブレーキ装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するため、請求項1に記載の発明では、操作部材(1)のストロークに基づいて移動させられる入力部材(2a、2d、2i)と、入力部材(2a、2d、2i)と対向する面を有し、入力部材(2a、2d、2i)と相対移動可能な対向面形成部材(2b、2g)との間の空間をシール部材(2ae、2j)で密閉し、この密閉された空間に、磁場もしくは電場の変化に基づいて粘度を変化させる機能性流体(2e、2k)を充填する。そして、入力部材(2a、2d、2i)がストロークに基づいて移動させられると、入力部材(2a、2d、2i)と一体となってシール部材(2ae、2j)および機能性流体(2e、2k)も移動させられ、入力部材(2a、2d、2i)と対向面形成部材(2b、2g)の間に磁場もしくは電場を発生させて機能性流体(2e、2k)の粘度を制御することで、入力部材(2a、2d、2i)と対向面形成部材(2b、2g)の間のせん断抵抗を制御することを特徴としている。
【0010】
このように、入力部材(2a、2d、2i)と対向面形成部材(2b、2g)との間に機能性流体(2e、2k)が配置され、この機能性流体(2e、2k)の粘度を磁場または電場の変化によって制御し、入力部材(2a、2d、2i)と対向面形成部材(2b、2g)との間のせん断抵抗が変化させられるような構造としている。したがって、ストロークシミュレータの反力特性、つまり操作部材(1)のストロークに対する反力の関係を磁場もしくは電場に応じて制御することが可能となる。
【0011】
また、このような構造のストロークシミュレータでは、入力部材(2a、2d、2i)が対向面形成部材(2b、2g)の対向面に対して相対移動させられる際に、入力部材(2a、2d、2i)の移動と共に機能性流体(2e、2k)も移動させられる。したがって、機能性流体(2e、2k)がオリフィスを通じて移動させられるような形態ではないため、反力特性に生じる操作部材(1)のストローク速度依存性を小さくすることが可能となる。これにより、ストロークシミュレータの反力特性に与えるストローク速度依存性の影響を抑制することが可能となる。
【0012】
例えば、請求項2に記載の発明のように、入力部材をピストン(2a)が備えられた構成とし、対向面形成部材をピストン(2a)が収容されるシリンダ(2b)が備えられた構成とし、ピストン(2a)の外周面とシリンダ(2b)の内周面との間に、シール部材(2ae)および機能性流体(2e)が配置された構造とすることができる。
【0013】
この場合、請求項3に記載したように、機能性流体(2e)として磁性流体もしくは磁気粘性流体を用いると共に、シリンダ(2b)を磁性体で構成し、ピストン(2a)として、外周面を一周する複数本の溝部(2ab)が形成された磁性体で構成されるピストン本体(2aa)と、複数本の溝部(2a)それぞれに巻回されたコイル(2ac)とを有した構成とし、コイル(2ac)に流れる電流の方向が互いに逆方向となる様に巻回されたものを含めるようにすると好ましい。
【0014】
このような構成により、コイル(2ac)への通電により、ピストン本体(2aa)と機能性流体(2e)およびシリンダ(2b)を通じる磁気回路を生成でき、機能性流体(2e)の粘度を制御することが可能となる。そして、流れる電流の方向が互いに逆方向とされたコイル(2ac)を含む構成とすることで、コイル(2ac)のうち流れる電流の方向が逆方向とされている部分において、ピストン本体(2aa)からシリンダ(2b)に横切る磁気回路を生成できる。そして、この部分において、機能性流体(2e)に含有された磁性粉末などがピストン本体(2aa)とシリンダ(2b)との間を繋ぐように密集し、ピストン(2a)とシリンダ(2b)との間のせん断抵抗が高くなる。したがって、より反力特性を広い範囲、つまり操作部材(1)のストロークに対して小さい反力から大きな反力まで調整することが可能となる。
【0015】
例えば、請求項4に記載の発明のように、ピストン(2a)を円柱状部材で構成し、シリンダ(2b)を円筒状部材で構成することができる。また、請求項5に記載の発明のように、ピストン(2a)を四角柱状部材で構成し、シリンダ(2b)を四角筒状部材で構成することもできる。
【0016】
以上のように構成されるストロークシミュレータは、例えば、請求項6に記載したように、操作部材としてブレーキ操作部材(1)を有すると共に、ブレーキ操作部材(1)のストロークを検出するストロークセンサ(1a)および/または踏力センサ(1b)と、ストロークセンサ(1a)および/または踏力センサ(1b)で検出されたストロークおよび/または踏力に対応するブレーキ液圧であるマスタシリンダ圧を発生させるマスタシリンダ(3)と、マスタシリンダ圧に対応するブレーキ液圧としてホイールシリンダ圧を発生させるホイールシリンダ(7a〜7d)と、ストロークセンサ(1a)および/または踏力センサ(1b)で検出されたストロークおよび/または踏力に基づいて、マスタシリンダ(3)にマスタシリンダ圧を発生させる制御部(8)とを有する車両用ブレーキ装置に適用することができ、入力部材(2a、2d、2i)をブレーキ操作部材(1)に連結し、ブレーキ操作部材(1)のストロークおよび/または踏力に基づいて入力部材(2a、2d、2i)が移動させられる構成とすることができる。
【0017】
なお、上記各手段の括弧内の符号は、後述する実施形態に記載の具体的手段との対応関係を示すものである。
【図面の簡単な説明】
【0018】
【図1】本発明の第1実施形態にかかるストロークシミュレータが適用された車両用ブレーキ装置の概略ブロック図である。
【図2】ストロークシミュレータ2の拡大断面図である。
【図3】コイル2acへの通電時の様子を示した図2中の領域R1の部分拡大図である。
【図4】本発明の第2実施形態にかかるストロークシミュレータ2の拡大断面図である。
【図5】電位差に基づいて電気回路を構成したときの図4中の領域R2の部分拡大図である。
【図6】本発明の第3実施形態にかかるストロークシミュレータ2の拡大断面図である。
【図7】本発明の第4実施形態にかかるストロークシミュレータ2の拡大断面図である。
【発明を実施するための形態】
【0019】
以下、本発明の実施形態について図に基づいて説明する。なお、以下の各実施形態相互において、互いに同一もしくは均等である部分には、図中、同一符号を付してある。
【0020】
(第1実施形態)
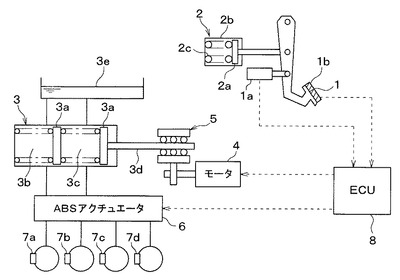
図1は、本実施形態にかかるストロークシミュレータが適用された車両用ブレーキ装置の概略ブロック図である。以下、この図を参照して、ストロークシミュレータが適用された車両用ブレーキ装置について説明する。
【0021】
図1に示す車両用ブレーキ装置には、運転者の操作力に基づいて操作されるブレーキ操作部材としてのブレーキペダル1、ペダルストロークセンサ1a、踏力センサ1b、ストロークシミュレータ2が備えられている。ストロークシミュレータ2は、ブレーキペダル1によって踏み込まれるピストン2a、ピストン2aを収容するシリンダ2b、シリンダ2b内に配置されたスプリング2cなどが備えられた構成とされている。そして、ストロークシミュレータ2のピストン2aがブレーキペダル1とが連結されており、ブレーキペダル1の踏み込みが為されると、スプリング2cからのバネ力やピストン2aとシリンダ2bとの間のせん断力によってブレーキペダル1の操作量に応じた反力がブレーキペダル1に加えられるようになっている。なお、このストロークシミュレータ2の詳細構造については、後で説明する。
【0022】
また、車両用ブレーキ装置には、ブレーキペダル1には分離された構成として、M/C3、電動モータ4およびギア機構5、ABSアクチュエータ6、各車輪に対応したホイールシリンダ(以下、W/Cという)7a〜7dが備えられている。
【0023】
M/C3は、マスタピストン3aによってプライマリ室3bとセカンダリ室3cとに分割され、プライマリ室3bが第1配管系統、セカンダリ室3cが第2配管系統に接続された構成とされている。このような構成において、ピストンロッド3dの軸方向への移動に伴ってマスタピストン3aを移動させ、各室3b、3cのブレーキ液圧(以下、M/C圧という)を増加させて、各W/C7a〜7dのブレーキ液圧(以下、W/C圧という)を増加させる。また、M/C3にはマスタリザーバ3eが備えられており、各室3b、3cそれぞれがマスタリザーバ3eに接続された構成とされている。
【0024】
電動モータ4は、ペダルストロークセンサ1aおよび/または踏力センサ1bでの検出信号に応じた回転駆動力(出力)を発生させる。ギア機構5は、ボールネジやラックアンドピニオンなどで構成されており、電動モータ4での回転駆動力を直進運動に変換する。このギア機構5によって、上述したピストンロッド3dが駆動され、電動モータ4の回転駆動力がギア機構5によって直進運動に変換されると、その変換後の力に応じてピストンロッド3dが駆動される。すなわち、電動モータ4の回転駆動力に応じたM/C圧を発生させ、それに応じたW/C圧を発生させる。
【0025】
ABSアクチュエータ6は、従来と同様の一般的な構成のものであり、各W/C7a〜7dそれぞれに発生させるW/C圧の増圧、保持、減圧を各輪独立して制御できるように構成されている。なお、ABSアクチュエータ6に関しては、従来から周知の一般的な構造であるため、詳細な構造については省略する。
【0026】
さらに、電動ブレーキ装置には、電動モータ4およびABSアクチュエータ6を駆動するための制御部としてのECU8が備えられている。このECU8には、ペダルストロークセンサ1aおよび/または踏力センサ1bからの検出信号等が入力されるようになっている。そして、ECU8は、入力された各信号に基づいて各種演算を行い、この演算によって求められるブレーキペダル1の操作量等に基づいて、電動モータ4及びABSアクチュエータ6への駆動信号を出力する。
【0027】
このように、車両用ブレーキ装置は、ブレーキペダル1の操作量に基づいて電動モータ4を駆動し、M/C3内にM/C圧を発生させ、それに基づいてW/C圧を発生させる構成とされている。そして、このような車両用ブレーキ装置装置に対して、ストロークシミュレータ2が適用されている。
【0028】
以下、このような車両用ブレーキ装置に備えられているストロークシミュレータ2の詳細構造について説明する。図2は、ストロークシミュレータ2の拡大断面図である。
【0029】
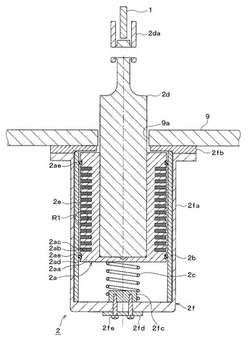
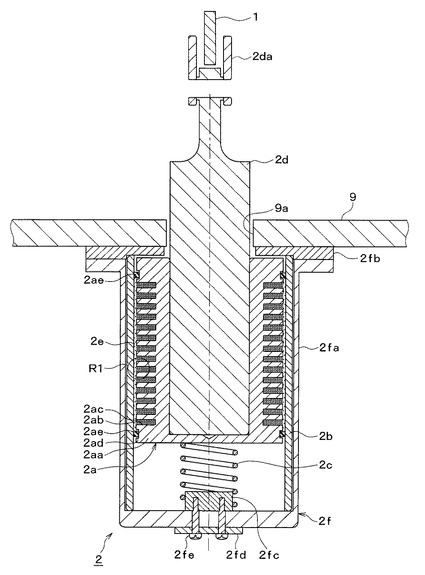
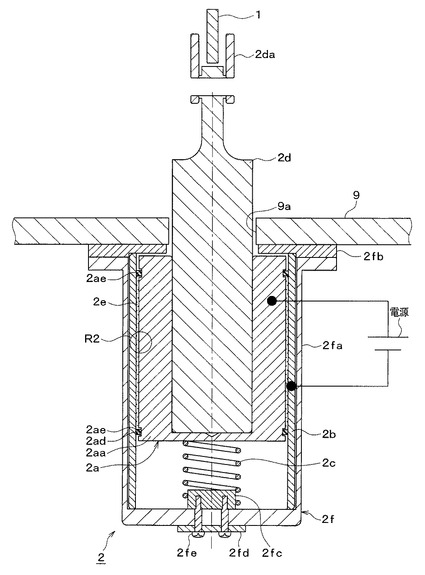
ストロークシミュレータ2は、上記したピストン2a、シリンダ2bおよびスプリング2cに加えて、入力ロッド2d、機能性流体2e、シリンダケース2f等を有した構成とされている。
【0030】
ピストン2aは、ブレーキペダル1の踏み込みに応じてシリンダ2b内を移動させられる円柱状部材である。本実施形態では、ピストン2aの本体(以下、ピストン本体という)2aaを断面円形状の中空部を有する有底円筒状の磁性体にて構成している。このピストン本体2aaの中空部内に入力ロッド2dが挿入されて一体化されており、入力ロッド2dを介してピストン2aにブレーキペダル1の操作力が加えられるようになっている。
【0031】
また、ピストン本体2aaの外周面には、ピストン本体2aaの周方向を一周する複数本の溝部2abがピストン2aの軸方向に並べて形成されている。複数本の溝部2abは等間隔に配置され、各溝部2ab内にはコイル2acが巻回されている。各溝部2ab内においてコイル2acは複数回巻回されており、隣り合うコイル2acの巻回方向が互いに逆方向とされることで流れる電流の方向が逆方向となるようにしてある。図2中には図示していないが、ピストン本体2aaの外周面には各溝部2abとピストン本体2aaの中空部内とを連通させる連通孔が形成されており、この連通孔を通じて各溝部2abに巻回されたコイル2acの引き出し配線部がピストン本体2aaの中空部内に引き出され、この中空部から図示しない外部電源に接続されている。外部電源からコイル2acへ供給する電流量は、例えばECU8によって制御可能とされている。連通孔は、機能性流体2eが漏出しないようにシリコンゴム等によって塞がれている。
【0032】
さらに、ピストン本体2aaのうち複数の溝部2abよりも両先端側において、ピストン本体2aaの外周面には、ピストン本体2aaの周方向を一周するシール溝2adが形成されている。このシール溝2ad内にはOリングなどのシール部材2aeが配置され、ピストン本体2aaの外周面と両シール部材2aeおよびシリンダ2bの内壁面によって構成される空間内を密閉している。
【0033】
シリンダ2bは、円筒状部材からなる磁性体によって構成されており、内径がピストン本体2aaの外径よりも大きな寸法とされている。このシリンダ2bの内周面を対向面として、ピストン2aが軸方向に沿って相対移動させられるようになっている。
【0034】
スプリング2cは、ピストン2aがブレーキペダル1の踏み込まれたときに移動する方向と反対方向にピストン2aを付勢する。スプリング2cは、ピストン本体2aaの底部の中央においてピストン2aを付勢しており、シリンダケース2fの底面に備えられた後述するスプリング保持部2fcに保持されている。なお、ピストン2aとシリンダケース2fとの間の空間のうち、スプリング2cが配置される空間は空気で満たされており、後述する機能性流体2eは充填されていない空間とされている。
【0035】
入力ロッド2dは、一端がクレビス2daを介してブレーキペダル1のアーム部に回転自在に連結されており、他端がピストン本体2aaの中空部内に挿入されることでピストン2aと一体化されている。このような構成とされているため、入力ロッド2dは、ブレーキペダル1の操作に応じて軸方向に移動させられ、その動作に伴ってピストン2aも同じように移動させる。具体的には、運転者がブレーキペダル1を踏み込むと、入力ロッド2dおよびピストン2aがスプリング2cのバネ力に抗して紙面下方に移動させられ、運転者がブレーキペダル1を放すと、入力ロッド2dおよびピストン2aがスプリング2cのバネ力によって初期位置に戻される。
【0036】
また、入力ロッド2dは、円柱形状の一部を切り欠いた断面形状とされており、その切り欠きによってピストン本体2aaの中空部に隙間が残るようにしてあり、その隙間にコイル2acの引き出し配線部を配置している。なお、本実施形態では、この入力ロッド2dおよびピストン2aが本発明の入力部材を構成することになる。本実施形態では、入力ロッド2dとピストン本体2aaとが別部材によって構成される例を挙げているが、これらを一部材で構成しても良い。
【0037】
機能性流体2eは、ピストン2aの外周面と両シール部材2aeおよびシリンダ2bの内壁面によって構成される空間内、つまり上記したように密閉された空間内に充填されている。この機能性流体2eは、コイル2acへの通電により発生させられる磁場に応じて粘度を変化させる流体により構成されている。本実施形態でいう機能性流体2eとしては、磁場に応じて粘度を変化させる磁性流体やMR流体(磁気粘性流体)を適用することができ、例えば流体中に含有された磁性粉末などが磁場によって移動させられることで、ピストン2aとシリンダ2bとの間のせん断抵抗を変化させる。
【0038】
シリンダケース2fは、ケース本体2fa、ケース上部2fb、スプリング保持部2fc、保持プレート2fd等を有した構成とされている。
【0039】
ケース本体2faは、断面円形状の中空部を有する有底円筒状で構成され、その中空部内にシリンダ2bおよびピストン2aなどが配置されている。ケース本体2fa内における底面には、円柱形状のスプリング保持部2fcが固定されており、このスプリング保持部2fcにスプリング2cが嵌め込まれている。ケース本体2faの底面を挟んでスプリング保持部2fcの反対側には保持プレート2fdが配置され、保持プレート2fd側から保持プレート2fdやケース本体2faの底面およびスプリング保持部2fcに形成された穴にネジ2feを締結することで、スプリング保持部2fcがケース本体2faに対して固定されている。
【0040】
また、ケース本体2faの開口端側は、径方向に広がるフランジ形状とされており、このフランジ形状部分にケース上部2fbが配置される。ケース上部2fbの内周は、ケース本体2faの内径よりも縮径され、かつ、入力ロッド2dよりも若干大径とされた挿入孔が形成されており、その挿入孔に入力ロッド2dが嵌め込まれるようにしてケース本体2faの開口部を蓋締めしている。
【0041】
このような構造によってストロークシミュレータ2が構成されており、車体部品もしくは車体部品に固定されたステーなどの取付部9に対して組み付けられている。具体的には、ブレーキペダル1と反対側から取付部9に形成された挿入孔9a内に入力ロッド2dを挿入したのち、図示しないネジなどを用いてケース本体2faおよびケース上部2fbを取付部9に締結する。これにより、ストロークシミュレータ2が取付部9に組み付けられる。そして、入力ロッド2dの先端とブレーキペダル1のアーム部とをクレビス2daを介して連結することで、ストロークシミュレータ2がブレーキペダル1に接続される。このような組み付け構造により、ストロークシミュレータ2が車体に固定され、ブレーキペダル1に連結されている。
【0042】
以上のように構成されたストロークシミュレータ2は、ブレーキペダル1が操作されると、そのストロークに応じた反力をブレーキペダル1に対して付与する。すなわち、ブレーキペダル1が踏み込まれると、入力ロッド2dを介してピストン2aがケース本体2faの底面側に移動させられ、スプリング2cのバネ力およびピストン2aとシリンダ2bとの間に発生するせん断力を合わせた力が反力として発生する。この反力がブレーキペダル1に付与される。
【0043】
また、このときに発生させられるピストン2aとシリンダ2bとの間でのせん断力は、機能性流体2eの粘度に応じて変化する。このため、例えばECU8によって、外部電源からコイル2acに供給される電流量を制御することにより、機能性流体2eの粘度を制御でき、ピストン2aとシリンダ2bとの間でのせん断力を制御できる。したがって、ストロークシミュレータ2の反力特性、つまりブレーキペダル1のストロークに対する反力の関係をコイル2acに供給する電流量に応じて制御することが可能となる。
【0044】
そして、本実施形態のような構造のストロークシミュレータ2では、ピストン2aがシリンダ2bの内壁面を相対移動させられる際に、ピストン2aの移動と共に機能性流体2eも移動させられる。したがって、機能性流体2eがオリフィスを通じて移動させられるような形態ではないため、反力特性に生じるブレーキペダル1のストローク速度に対する依存性を小さくすることが可能となる。これにより、ストロークシミュレータ2の反力特性のストローク速度依存性の影響を抑制することが可能となる。
【0045】
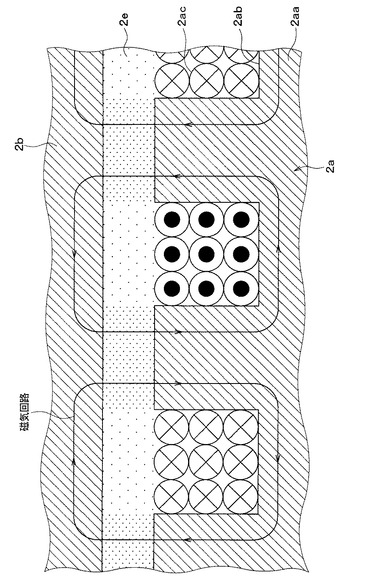
さらに、本実施形態のような構造のストロークシミュレータ2では、ピストン本体2aaに形成した複数本の溝部2ab内のコイル2acの巻回方向が隣り合うコイル2ac同士で互いに逆方向となるようにし、流れる電流の方向が逆方向となるようにしている。このため、以下の効果を奏することが可能となる。これについて、図3を参照して説明する。
【0046】
図3は、コイル2acへの通電時の様子を示した図2中の領域R1の部分拡大図である。この図に示すように、各コイル2acは、通電により、磁性体で構成されたピストン本体2aa、機能性流体2e、磁性体で構成されたシリンダ2bを通じる磁気回路を構成する。このときに形成される磁気回路中における磁界の向きは、隣り合う各コイル2acでの巻回方向が逆とされて電流の流れる方向が逆方向とされていることから、隣り合うコイル2ac同士で発生させる磁気回路の磁界向きが逆になる。このため、各コイル2acが発生させる磁気回路は繋がることなく分離された構成となり、各コイル2acそれぞれで、径方向においてピストン本体2aaからシリンダ2bに横切る磁気回路が生成される。そして、この部分において、機能性流体2eに含有された磁性粉末などがピストン本体2aaとシリンダ2bとの間を繋ぐように密集し、ピストン2aとシリンダ2bとの間のせん断抵抗が高くなる。
【0047】
これに対して、隣り合う各コイル2acの巻回方向を同じにして電流の流れる方向が同じになるようにすると、各コイル2acが分離されていても、全体で1つの磁気回路を構成することになり、全コイル2acの両先端位置でしか径方向においてピストン本体2aaからシリンダ2bに横切る磁気回路が生成されない。このため、この部分において、機能性流体2eに含有された磁性粉末などがピストン本体2aaとシリンダ2bとの間を繋ぐように密集し、ピストン2aとシリンダ2bとの間のせん断抵抗が高くなったとしても、隣り合う各コイル2acでの巻回方向を逆にして電流の流れる方向を逆方向にした場合よりもせん断抵抗を高くするのが難しい。
【0048】
このように、隣り合う各コイル2acでの巻回方向を逆にして電流が流れる方向が逆方向となるようにすることで、ピストン2aとシリンダ2bとの間のせん断抵抗をより高くすることが可能となる。したがって、より反力特性を広い範囲、つまりブレーキペダル1のストロークに対して小さい反力から大きな反力まで調整することが可能となる。
【0049】
(第2実施形態)
本発明の第2実施形態について説明する。本実施形態は、第1実施形態に対してストロークシミュレータ2の構成を変更したものであり、その他に関しては第1実施形態と同様であるため、第1実施形態と異なる部分について主に説明する。
【0050】
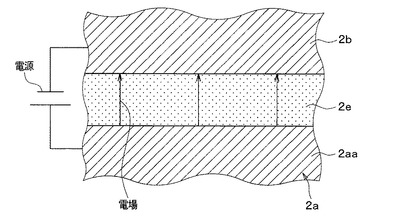
図4は、本実施形態にかかるストロークシミュレータ2の拡大断面図である。この図に示すように、本実施形態は、第1実施形態のストロークシミュレータ2に備えてあった溝部2abやコイル2acについては備えておらず、ピストン本体2aaの外周面と両シール部材2aeおよびシリンダ2bの内壁面によって構成される空間内に、機能性流体2eを備えた構造とし、ピストン本体2aaおよびシリンダ2bを導体にて構成した点が第1実施形態と相違している。そして、機能性流体2eとしては、絶縁体の微粒子を絶縁液体(例えばシリコンオイル)に加えたER流体(電気粘性流体)を用いている。
【0051】
このように構成されたストロークシミュレータ2では、ピストン本体2aaやシリンダ2bおよび機能性流体2eを経路とする電気回路を構成し、ピストン本体2aaとシリンダ2bとの間に電位差を発生させることにより、機能性流体2eの粘性を変化させ、ピストン2aとシリンダ2bとの間のせん断抵抗を変化させる。
【0052】
図5は、このときのピストン本体2aaとシリンダ2bとの間の様子を示した図4の領域R2の部分拡大図である。この図に示すように、ピストン本体2aaとシリンダ2bとの間に電位差を発生させることにより、これらの間に径方向の電場(電界)を発生させ、機能性流体2eに対して印加する。これにより、機能性流体2eの粘性が変化し、ピストン2aとシリンダ2bとの間のせん断抵抗を変化させることが可能となる。したがって、ストロークシミュレータ2の反力特性、つまりブレーキペダル1のストロークに対する反力の関係をピストン本体2aaとシリンダ2bとの間に発生させる電位差に応じて制御することが可能となる。
【0053】
このように、ピストン本体2aaとシリンダ2bとの間に機能性流体2eとしてER流体を充填し、ピストン本体2aaとシリンダ2bとの間に電位差を発生させるようにしても、第1実施形態と同様の効果を得ることができる。
【0054】
(第3実施形態)
本発明の第3実施形態について説明する。本実施形態は、第1実施形態のように磁場の発生に応じて粘度が変わる機能性流体を用いているが、ストロークシミュレータ2の構造を変更している。その他に関しては第1実施形態と同様であるため、第1実施形態と異なる部分について主に説明する。
【0055】
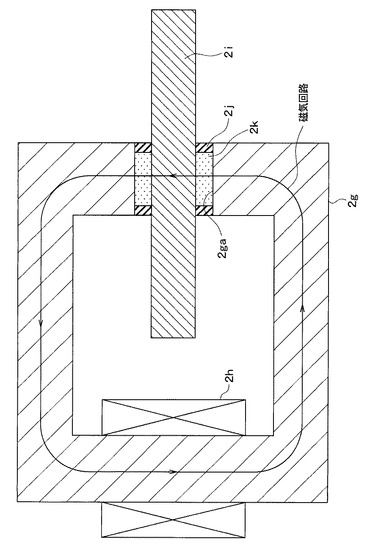
図6は、本実施形態にかかるストロークシミュレータ2の断面図である。この図に示すように、ストロークシミュレータ2は、回路構成部材2g、コイル2h、入力プレート2i、シール部材2j、機能性流体2kを有した構成とされている。
【0056】
回路構成部材2gは、磁性体からなり、一部を切り欠いてギャップ2gaを形成した環状部材によって構成されている。本実施形態では、この回路構成部材2gにより、磁気回路を構成する。コイル2hは、回路構成部材2gの少なくとも一部に巻回されており、通電により、回路構成部材2gを通じる経路に磁気回路を生成する。入力プレート2iは、磁性体からなり、図示しないが、一端がブレーキペダル1に連結されている。シール部材2jは、回路構成部材2gに形成されたギャップ2ga内において、回路構成部材2gと入力プレート2iとの間をシールしており、回路構成部材2gのうち入力プレート2iと対向する面の外縁を囲むように配置されている。これにより、回路構成部材2gのギャップ2ga内には、回路構成部材2gのうち入力プレート2iと対向する面と、入力プレート2iおよびシール部材2jとによって囲まれる空間が密閉されている。機能性流体2kは、回路構成部材2gのうち入力プレート2iと対向する面と、入力プレート2iおよびシール部材2jとによって囲まれる空間に充填されている。この機能性流体2kも、コイル2hへの通電により発生させられる磁場に応じて粘度を変化させる流体により構成されている。
【0057】
このように構成されるストロークシミュレータ2は、コイル2hへの通電により、回路構成部材2gのうち入力プレート2iの両側に配置される部分、つまり入力プレート2iと対抗する面と入力プレート2iとの間に磁場を発生させる。これにより、回路構成部材2gと入力プレート2iとの間に充填された機能性流体2kの粘度が変化し、回路構成部材2gと入力プレート2iとの間のせん断抵抗を変化させる。したがって、本実施形態のような構成のストロークシミュレータ2によっても、第1実施形態と同様の効果を得ることができる。
【0058】
(第4実施形態)
本発明の第4実施形態について説明する。本実施形態は、第2実施形態のように電場の発生に応じて粘度が変わる機能性流体を用いているが、ストロークシミュレータ2の構造を変更している。具体的には、ストロークシミュレータ2を第3実施形態に類似する構造としており、基本的な構造については第3実施形態と同様であるため、第3実施形態と異なる部分について主に説明する。
【0059】
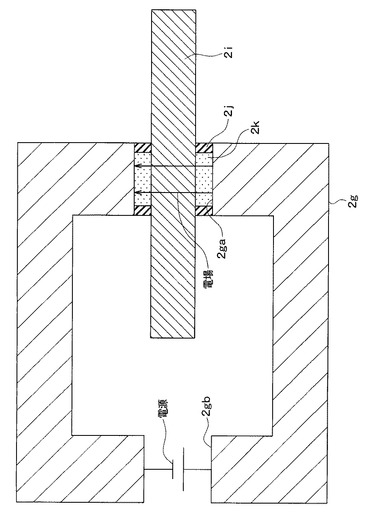
図7は、本実施形態にかかるストロークシミュレータ2の断面図である。この図に示すように、本実施形態では、ストロークシミュレータ2を、回路構成部材2g、入力プレート2i、シール部材2j、機能性流体2kを有した構成としているが、第3実施形態に対して各部の材質を変更すると共に、回路構成部材2gの構造を変更し、さらにコイル2hをなくした構成としている。
【0060】
具体的には、回路構成部材2g、入力プレート2iを導体にて構成し、機能性流体2kをER流体としている。また、回路構成部材2gに対してギャップ2gaとは異なるギャップ2gbを形成し、このギャップ2gbを構成している回路構成部材2gの両側に電源から所定の電圧を印加することで、もう一方のギャップ2ga、つまり入力プレート2iの両側に電位差を発生させるようにしている。
【0061】
このような構成では、回路構成部材2gを経路として電気回路を構成し、回路構成部材2gのギャップ2gaの間において電位差に基づく電場を発生させる。これにより、回路構成部材2gと入力プレート2iとの間に配置された機能性流体2kの粘度が変化し、回路構成部材2gと入力プレート2iとの間のせん断抵抗を変化させる。したがって、本実施形態のような構成のストロークシミュレータ2によっても、第1実施形態と同様の効果を得ることができる。
【0062】
(他の実施形態)
上記各実施形態では、磁気回路もしくは電気回路を構成し、磁場もしくは電場の変化によって機能性流体2e、2kの粘度を変化させることができるストロークシミュレータ2の構造の一例を示した。しかしながら、上記各実施形態で説明した構造は、本発明が適用されるストロークシミュレータ2の一例を示したに過ぎず、他の構造を採用することもできる。
【0063】
すなわち、上記第1、第2実施形態では、ピストン2aとシリンダ2bとの間に機能性流体2eを配置し、シリンダ2bの内周面を対向面としたせん断抵抗に基づいてブレーキペダル1のストロークに対する反力を発生させるようにしている。また、第3、第4実施形態では、入力プレート2iの両側に回路構成部材2gが配置されるようにし、回路構成部材2gのうち入力プレート2iと対向する面を対向面としたせん断抵抗に基づいてブレーキペダル1のストロークに対する反力を発生させるようにしている。これらは、操作部材によって移動させられる入力部材(ピストン2aや入力ロッド2d)を円筒状の対向面形成部材(シリンダ2b)で囲んだ構造、もしくは、入力部材(入力プレート2i)の両側を対向面形成部材(回路構成部材2g)で挟み込んだ構造としたものである。
【0064】
これに対して、入力部材と対向面形成部材との間に機能性流体が配置され、この機能性流体の粘度を磁場または電場の変化によって制御し、入力部材と対向面形成部材との間のせん断抵抗が変化させられるような構造であれば、他の構造であっても構わない。
【0065】
例えば、第1、第2実施形態で説明したようなピストン2aを円柱形状から四角柱形状に変更し、シリンダ2bを円筒形状からピストン2aの外周面を囲む四角筒形状に変更しても良い。また、第3、第4実施形態のように入力プレート2iの両側を回路構成部材2gで挟み込み、入力プレート2iの両面に機能性流体2kを配置するのではなく、入力プレート2iの片面のみに機能性流体2kを配置した構造としても良い。また、ピストン2aとシリンダ2bとの間の一周全域において機能性流体2eを充填するようにしたが、そのうちの一部にのみ機能性流体2eが配置されるような構造であっても構わない。
【0066】
また、回路構成部材2gは、上記したようなギャップ2ga、2gbを有する環状部材とする必要はなく、入力プレート2iおよび機能性流体2kが相対移動させられる対向面が構成されるものであれば良く、単なる板状部材であっても構わない。
【0067】
さらに、第1、第2実施形態のようなピストン2aやシリンダ2bを多重構造とし、多重構造とした各ピストン2aが多重構造とされた各シリンダ2bの間に順に入れ子のように配置される構造とし、各ピストン2aと各シリンダ2bとの間に機能性流体2eを充填した構造としても良い。同様に、第3、第4実施形態のような入力プレート2iや回路構成部材2gも板状部材が複数枚重ねられた構造となるようにし、各入力プレート2iと回路構成部材2gの間に機能性流体2kを充填した構造としても良い。
【0068】
また、上記第1実施形態では、ピストン本体2aaの外周面に複数本の溝部2abを備え、隣り合う各溝部2abに配置されるコイル2acに流れる電流の方向が互いに逆方向になるようにしたが、隣り合う各溝部2abすべてにおいて流れる電流の方向が逆になっている必要はない。例えば、溝部2abの2個おきにコイル2acの流れる電流の方向が逆になるようにしたり、複数の溝部2abのうちの一部に配置されるコイル2acのみが残りの溝部2abに配置されるコイル2acと流れる電流の方向が逆になっている構成であっても良い。また、コイル2acの巻回方向を逆方向とすることで流れる電流の方向が逆となるようにしたが、コイル2acの巻回方向を同方向として流れる電流の方向が逆となるようにしても良い。
【符号の説明】
【0069】
1…ブレーキペダル、2…ストロークシミュレータ、2a…ピストン、2aa…ピストン本体、2ab…溝部、2ac…コイル、2ad…シール溝、2ae…シール部材、2b…シリンダ、2c…スプリング、2d…入力ロッド、2da…クレビス、2e…機能性流体、2f…シリンダケース、2fa…ケース本体、2fb…ケース上部、2fc…スプリング保持部、2fd…保持プレート、2fe…ネジ、2g…回路構成部材、2ga…ギャップ、2gb…ギャップ、2h…コイル、2i…入力プレート、2j…シール部材、2k…機能性流体、3…M/C、4…電動モータ、5…ギア機構、6…アクチュエータ、7a〜7d…W/C
【技術分野】
【0001】
本発明は、磁場または電場の変化に基づいて反力(抵抗力)を変化させることができるストロークシミュレータおよびそれを用いた車両用ブレーキ装置に関するものである。
【背景技術】
【0002】
従来、車両用ブレーキ装置において、ブレーキペダルの踏み込みに応じた反力を付与するために、ストロークシミュレータを備えたものが提案されている。
【0003】
例えば、特許文献1では、シリンダの内部に磁性流体を封入すると共に、シリンダ内に配置されたピストンとシリンダとの間に磁性流体が流動するオリフィスを備え、シリンダおよびピストンが作る磁気回路長がピストンのストローク量に応じて変化する構造のストロークシミュレータが提案されている。このストロークシミュレータでは、ピストンのストローク量に応じて磁気回路長が変化すると、オリフィス部に生じる磁場が変化することによって磁性流体の粘度が変化し、反力が変化する。これにより、ストロークシミュレータにより生成される反力の調整を行っている。
【0004】
また、特許文献2では、ブレーキバイワイヤシステムにおける電気的な失陥時に、シミュレータ内のスプリングが操作力の損失となることを防ぐために、失陥時に、電磁石によってシリンダ内に充填された磁性流体に磁力を作用させる車両用制動制御装置が提案されている。この車両用制動制御装置では、シリンダとピストンの間の連通溝、ピストンを貫通する連通孔、もしくは、シリンダの両端間のバイパスをオリフィスとして、そのオリフィス内を磁性流体が流動し難くなるようにしている。これにより、スプリングの変位を抑制し、スプリングが操作力の損失となることを防いでいる。
【0005】
さらに、特許文献3では、ストロークシミュレータの反力発生特性を簡単な構造で任意に制御できるブレーキバイワイヤシステムのブレーキ装置が提案されている。このブレーキ装置では、マスタシリンダ(以下、M/Cという)圧を磁性流体の液圧に変換し、オリフィスを介してスプリングを圧縮する構成において、磁場の強さを任意に変えることによって、ペダル反力を制御できるようにしている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2009−126327号公報
【特許文献2】特開2006−117117号公報
【特許文献3】特開2007−230402号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、上記特許文献1〜3のストロークシミュレータでは、いずれのものもオリフィスを流動する磁性流体の粘度を変化させることによってストロークに対する反力を変化させるようにしているため、反力特性のストローク速度依存性が大きくなる。すなわち、磁性流体がオリフィスを流動することを前提とした構造であるため、ストローク量が同じであったとしてもストローク速度によって反力特性が変化する。
【0008】
本発明は上記点に鑑みて、反力特性のストローク速度依存性の影響を抑制できるストロークシミュレータおよびそれを備えた車両用ブレーキ装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するため、請求項1に記載の発明では、操作部材(1)のストロークに基づいて移動させられる入力部材(2a、2d、2i)と、入力部材(2a、2d、2i)と対向する面を有し、入力部材(2a、2d、2i)と相対移動可能な対向面形成部材(2b、2g)との間の空間をシール部材(2ae、2j)で密閉し、この密閉された空間に、磁場もしくは電場の変化に基づいて粘度を変化させる機能性流体(2e、2k)を充填する。そして、入力部材(2a、2d、2i)がストロークに基づいて移動させられると、入力部材(2a、2d、2i)と一体となってシール部材(2ae、2j)および機能性流体(2e、2k)も移動させられ、入力部材(2a、2d、2i)と対向面形成部材(2b、2g)の間に磁場もしくは電場を発生させて機能性流体(2e、2k)の粘度を制御することで、入力部材(2a、2d、2i)と対向面形成部材(2b、2g)の間のせん断抵抗を制御することを特徴としている。
【0010】
このように、入力部材(2a、2d、2i)と対向面形成部材(2b、2g)との間に機能性流体(2e、2k)が配置され、この機能性流体(2e、2k)の粘度を磁場または電場の変化によって制御し、入力部材(2a、2d、2i)と対向面形成部材(2b、2g)との間のせん断抵抗が変化させられるような構造としている。したがって、ストロークシミュレータの反力特性、つまり操作部材(1)のストロークに対する反力の関係を磁場もしくは電場に応じて制御することが可能となる。
【0011】
また、このような構造のストロークシミュレータでは、入力部材(2a、2d、2i)が対向面形成部材(2b、2g)の対向面に対して相対移動させられる際に、入力部材(2a、2d、2i)の移動と共に機能性流体(2e、2k)も移動させられる。したがって、機能性流体(2e、2k)がオリフィスを通じて移動させられるような形態ではないため、反力特性に生じる操作部材(1)のストローク速度依存性を小さくすることが可能となる。これにより、ストロークシミュレータの反力特性に与えるストローク速度依存性の影響を抑制することが可能となる。
【0012】
例えば、請求項2に記載の発明のように、入力部材をピストン(2a)が備えられた構成とし、対向面形成部材をピストン(2a)が収容されるシリンダ(2b)が備えられた構成とし、ピストン(2a)の外周面とシリンダ(2b)の内周面との間に、シール部材(2ae)および機能性流体(2e)が配置された構造とすることができる。
【0013】
この場合、請求項3に記載したように、機能性流体(2e)として磁性流体もしくは磁気粘性流体を用いると共に、シリンダ(2b)を磁性体で構成し、ピストン(2a)として、外周面を一周する複数本の溝部(2ab)が形成された磁性体で構成されるピストン本体(2aa)と、複数本の溝部(2a)それぞれに巻回されたコイル(2ac)とを有した構成とし、コイル(2ac)に流れる電流の方向が互いに逆方向となる様に巻回されたものを含めるようにすると好ましい。
【0014】
このような構成により、コイル(2ac)への通電により、ピストン本体(2aa)と機能性流体(2e)およびシリンダ(2b)を通じる磁気回路を生成でき、機能性流体(2e)の粘度を制御することが可能となる。そして、流れる電流の方向が互いに逆方向とされたコイル(2ac)を含む構成とすることで、コイル(2ac)のうち流れる電流の方向が逆方向とされている部分において、ピストン本体(2aa)からシリンダ(2b)に横切る磁気回路を生成できる。そして、この部分において、機能性流体(2e)に含有された磁性粉末などがピストン本体(2aa)とシリンダ(2b)との間を繋ぐように密集し、ピストン(2a)とシリンダ(2b)との間のせん断抵抗が高くなる。したがって、より反力特性を広い範囲、つまり操作部材(1)のストロークに対して小さい反力から大きな反力まで調整することが可能となる。
【0015】
例えば、請求項4に記載の発明のように、ピストン(2a)を円柱状部材で構成し、シリンダ(2b)を円筒状部材で構成することができる。また、請求項5に記載の発明のように、ピストン(2a)を四角柱状部材で構成し、シリンダ(2b)を四角筒状部材で構成することもできる。
【0016】
以上のように構成されるストロークシミュレータは、例えば、請求項6に記載したように、操作部材としてブレーキ操作部材(1)を有すると共に、ブレーキ操作部材(1)のストロークを検出するストロークセンサ(1a)および/または踏力センサ(1b)と、ストロークセンサ(1a)および/または踏力センサ(1b)で検出されたストロークおよび/または踏力に対応するブレーキ液圧であるマスタシリンダ圧を発生させるマスタシリンダ(3)と、マスタシリンダ圧に対応するブレーキ液圧としてホイールシリンダ圧を発生させるホイールシリンダ(7a〜7d)と、ストロークセンサ(1a)および/または踏力センサ(1b)で検出されたストロークおよび/または踏力に基づいて、マスタシリンダ(3)にマスタシリンダ圧を発生させる制御部(8)とを有する車両用ブレーキ装置に適用することができ、入力部材(2a、2d、2i)をブレーキ操作部材(1)に連結し、ブレーキ操作部材(1)のストロークおよび/または踏力に基づいて入力部材(2a、2d、2i)が移動させられる構成とすることができる。
【0017】
なお、上記各手段の括弧内の符号は、後述する実施形態に記載の具体的手段との対応関係を示すものである。
【図面の簡単な説明】
【0018】
【図1】本発明の第1実施形態にかかるストロークシミュレータが適用された車両用ブレーキ装置の概略ブロック図である。
【図2】ストロークシミュレータ2の拡大断面図である。
【図3】コイル2acへの通電時の様子を示した図2中の領域R1の部分拡大図である。
【図4】本発明の第2実施形態にかかるストロークシミュレータ2の拡大断面図である。
【図5】電位差に基づいて電気回路を構成したときの図4中の領域R2の部分拡大図である。
【図6】本発明の第3実施形態にかかるストロークシミュレータ2の拡大断面図である。
【図7】本発明の第4実施形態にかかるストロークシミュレータ2の拡大断面図である。
【発明を実施するための形態】
【0019】
以下、本発明の実施形態について図に基づいて説明する。なお、以下の各実施形態相互において、互いに同一もしくは均等である部分には、図中、同一符号を付してある。
【0020】
(第1実施形態)
図1は、本実施形態にかかるストロークシミュレータが適用された車両用ブレーキ装置の概略ブロック図である。以下、この図を参照して、ストロークシミュレータが適用された車両用ブレーキ装置について説明する。
【0021】
図1に示す車両用ブレーキ装置には、運転者の操作力に基づいて操作されるブレーキ操作部材としてのブレーキペダル1、ペダルストロークセンサ1a、踏力センサ1b、ストロークシミュレータ2が備えられている。ストロークシミュレータ2は、ブレーキペダル1によって踏み込まれるピストン2a、ピストン2aを収容するシリンダ2b、シリンダ2b内に配置されたスプリング2cなどが備えられた構成とされている。そして、ストロークシミュレータ2のピストン2aがブレーキペダル1とが連結されており、ブレーキペダル1の踏み込みが為されると、スプリング2cからのバネ力やピストン2aとシリンダ2bとの間のせん断力によってブレーキペダル1の操作量に応じた反力がブレーキペダル1に加えられるようになっている。なお、このストロークシミュレータ2の詳細構造については、後で説明する。
【0022】
また、車両用ブレーキ装置には、ブレーキペダル1には分離された構成として、M/C3、電動モータ4およびギア機構5、ABSアクチュエータ6、各車輪に対応したホイールシリンダ(以下、W/Cという)7a〜7dが備えられている。
【0023】
M/C3は、マスタピストン3aによってプライマリ室3bとセカンダリ室3cとに分割され、プライマリ室3bが第1配管系統、セカンダリ室3cが第2配管系統に接続された構成とされている。このような構成において、ピストンロッド3dの軸方向への移動に伴ってマスタピストン3aを移動させ、各室3b、3cのブレーキ液圧(以下、M/C圧という)を増加させて、各W/C7a〜7dのブレーキ液圧(以下、W/C圧という)を増加させる。また、M/C3にはマスタリザーバ3eが備えられており、各室3b、3cそれぞれがマスタリザーバ3eに接続された構成とされている。
【0024】
電動モータ4は、ペダルストロークセンサ1aおよび/または踏力センサ1bでの検出信号に応じた回転駆動力(出力)を発生させる。ギア機構5は、ボールネジやラックアンドピニオンなどで構成されており、電動モータ4での回転駆動力を直進運動に変換する。このギア機構5によって、上述したピストンロッド3dが駆動され、電動モータ4の回転駆動力がギア機構5によって直進運動に変換されると、その変換後の力に応じてピストンロッド3dが駆動される。すなわち、電動モータ4の回転駆動力に応じたM/C圧を発生させ、それに応じたW/C圧を発生させる。
【0025】
ABSアクチュエータ6は、従来と同様の一般的な構成のものであり、各W/C7a〜7dそれぞれに発生させるW/C圧の増圧、保持、減圧を各輪独立して制御できるように構成されている。なお、ABSアクチュエータ6に関しては、従来から周知の一般的な構造であるため、詳細な構造については省略する。
【0026】
さらに、電動ブレーキ装置には、電動モータ4およびABSアクチュエータ6を駆動するための制御部としてのECU8が備えられている。このECU8には、ペダルストロークセンサ1aおよび/または踏力センサ1bからの検出信号等が入力されるようになっている。そして、ECU8は、入力された各信号に基づいて各種演算を行い、この演算によって求められるブレーキペダル1の操作量等に基づいて、電動モータ4及びABSアクチュエータ6への駆動信号を出力する。
【0027】
このように、車両用ブレーキ装置は、ブレーキペダル1の操作量に基づいて電動モータ4を駆動し、M/C3内にM/C圧を発生させ、それに基づいてW/C圧を発生させる構成とされている。そして、このような車両用ブレーキ装置装置に対して、ストロークシミュレータ2が適用されている。
【0028】
以下、このような車両用ブレーキ装置に備えられているストロークシミュレータ2の詳細構造について説明する。図2は、ストロークシミュレータ2の拡大断面図である。
【0029】
ストロークシミュレータ2は、上記したピストン2a、シリンダ2bおよびスプリング2cに加えて、入力ロッド2d、機能性流体2e、シリンダケース2f等を有した構成とされている。
【0030】
ピストン2aは、ブレーキペダル1の踏み込みに応じてシリンダ2b内を移動させられる円柱状部材である。本実施形態では、ピストン2aの本体(以下、ピストン本体という)2aaを断面円形状の中空部を有する有底円筒状の磁性体にて構成している。このピストン本体2aaの中空部内に入力ロッド2dが挿入されて一体化されており、入力ロッド2dを介してピストン2aにブレーキペダル1の操作力が加えられるようになっている。
【0031】
また、ピストン本体2aaの外周面には、ピストン本体2aaの周方向を一周する複数本の溝部2abがピストン2aの軸方向に並べて形成されている。複数本の溝部2abは等間隔に配置され、各溝部2ab内にはコイル2acが巻回されている。各溝部2ab内においてコイル2acは複数回巻回されており、隣り合うコイル2acの巻回方向が互いに逆方向とされることで流れる電流の方向が逆方向となるようにしてある。図2中には図示していないが、ピストン本体2aaの外周面には各溝部2abとピストン本体2aaの中空部内とを連通させる連通孔が形成されており、この連通孔を通じて各溝部2abに巻回されたコイル2acの引き出し配線部がピストン本体2aaの中空部内に引き出され、この中空部から図示しない外部電源に接続されている。外部電源からコイル2acへ供給する電流量は、例えばECU8によって制御可能とされている。連通孔は、機能性流体2eが漏出しないようにシリコンゴム等によって塞がれている。
【0032】
さらに、ピストン本体2aaのうち複数の溝部2abよりも両先端側において、ピストン本体2aaの外周面には、ピストン本体2aaの周方向を一周するシール溝2adが形成されている。このシール溝2ad内にはOリングなどのシール部材2aeが配置され、ピストン本体2aaの外周面と両シール部材2aeおよびシリンダ2bの内壁面によって構成される空間内を密閉している。
【0033】
シリンダ2bは、円筒状部材からなる磁性体によって構成されており、内径がピストン本体2aaの外径よりも大きな寸法とされている。このシリンダ2bの内周面を対向面として、ピストン2aが軸方向に沿って相対移動させられるようになっている。
【0034】
スプリング2cは、ピストン2aがブレーキペダル1の踏み込まれたときに移動する方向と反対方向にピストン2aを付勢する。スプリング2cは、ピストン本体2aaの底部の中央においてピストン2aを付勢しており、シリンダケース2fの底面に備えられた後述するスプリング保持部2fcに保持されている。なお、ピストン2aとシリンダケース2fとの間の空間のうち、スプリング2cが配置される空間は空気で満たされており、後述する機能性流体2eは充填されていない空間とされている。
【0035】
入力ロッド2dは、一端がクレビス2daを介してブレーキペダル1のアーム部に回転自在に連結されており、他端がピストン本体2aaの中空部内に挿入されることでピストン2aと一体化されている。このような構成とされているため、入力ロッド2dは、ブレーキペダル1の操作に応じて軸方向に移動させられ、その動作に伴ってピストン2aも同じように移動させる。具体的には、運転者がブレーキペダル1を踏み込むと、入力ロッド2dおよびピストン2aがスプリング2cのバネ力に抗して紙面下方に移動させられ、運転者がブレーキペダル1を放すと、入力ロッド2dおよびピストン2aがスプリング2cのバネ力によって初期位置に戻される。
【0036】
また、入力ロッド2dは、円柱形状の一部を切り欠いた断面形状とされており、その切り欠きによってピストン本体2aaの中空部に隙間が残るようにしてあり、その隙間にコイル2acの引き出し配線部を配置している。なお、本実施形態では、この入力ロッド2dおよびピストン2aが本発明の入力部材を構成することになる。本実施形態では、入力ロッド2dとピストン本体2aaとが別部材によって構成される例を挙げているが、これらを一部材で構成しても良い。
【0037】
機能性流体2eは、ピストン2aの外周面と両シール部材2aeおよびシリンダ2bの内壁面によって構成される空間内、つまり上記したように密閉された空間内に充填されている。この機能性流体2eは、コイル2acへの通電により発生させられる磁場に応じて粘度を変化させる流体により構成されている。本実施形態でいう機能性流体2eとしては、磁場に応じて粘度を変化させる磁性流体やMR流体(磁気粘性流体)を適用することができ、例えば流体中に含有された磁性粉末などが磁場によって移動させられることで、ピストン2aとシリンダ2bとの間のせん断抵抗を変化させる。
【0038】
シリンダケース2fは、ケース本体2fa、ケース上部2fb、スプリング保持部2fc、保持プレート2fd等を有した構成とされている。
【0039】
ケース本体2faは、断面円形状の中空部を有する有底円筒状で構成され、その中空部内にシリンダ2bおよびピストン2aなどが配置されている。ケース本体2fa内における底面には、円柱形状のスプリング保持部2fcが固定されており、このスプリング保持部2fcにスプリング2cが嵌め込まれている。ケース本体2faの底面を挟んでスプリング保持部2fcの反対側には保持プレート2fdが配置され、保持プレート2fd側から保持プレート2fdやケース本体2faの底面およびスプリング保持部2fcに形成された穴にネジ2feを締結することで、スプリング保持部2fcがケース本体2faに対して固定されている。
【0040】
また、ケース本体2faの開口端側は、径方向に広がるフランジ形状とされており、このフランジ形状部分にケース上部2fbが配置される。ケース上部2fbの内周は、ケース本体2faの内径よりも縮径され、かつ、入力ロッド2dよりも若干大径とされた挿入孔が形成されており、その挿入孔に入力ロッド2dが嵌め込まれるようにしてケース本体2faの開口部を蓋締めしている。
【0041】
このような構造によってストロークシミュレータ2が構成されており、車体部品もしくは車体部品に固定されたステーなどの取付部9に対して組み付けられている。具体的には、ブレーキペダル1と反対側から取付部9に形成された挿入孔9a内に入力ロッド2dを挿入したのち、図示しないネジなどを用いてケース本体2faおよびケース上部2fbを取付部9に締結する。これにより、ストロークシミュレータ2が取付部9に組み付けられる。そして、入力ロッド2dの先端とブレーキペダル1のアーム部とをクレビス2daを介して連結することで、ストロークシミュレータ2がブレーキペダル1に接続される。このような組み付け構造により、ストロークシミュレータ2が車体に固定され、ブレーキペダル1に連結されている。
【0042】
以上のように構成されたストロークシミュレータ2は、ブレーキペダル1が操作されると、そのストロークに応じた反力をブレーキペダル1に対して付与する。すなわち、ブレーキペダル1が踏み込まれると、入力ロッド2dを介してピストン2aがケース本体2faの底面側に移動させられ、スプリング2cのバネ力およびピストン2aとシリンダ2bとの間に発生するせん断力を合わせた力が反力として発生する。この反力がブレーキペダル1に付与される。
【0043】
また、このときに発生させられるピストン2aとシリンダ2bとの間でのせん断力は、機能性流体2eの粘度に応じて変化する。このため、例えばECU8によって、外部電源からコイル2acに供給される電流量を制御することにより、機能性流体2eの粘度を制御でき、ピストン2aとシリンダ2bとの間でのせん断力を制御できる。したがって、ストロークシミュレータ2の反力特性、つまりブレーキペダル1のストロークに対する反力の関係をコイル2acに供給する電流量に応じて制御することが可能となる。
【0044】
そして、本実施形態のような構造のストロークシミュレータ2では、ピストン2aがシリンダ2bの内壁面を相対移動させられる際に、ピストン2aの移動と共に機能性流体2eも移動させられる。したがって、機能性流体2eがオリフィスを通じて移動させられるような形態ではないため、反力特性に生じるブレーキペダル1のストローク速度に対する依存性を小さくすることが可能となる。これにより、ストロークシミュレータ2の反力特性のストローク速度依存性の影響を抑制することが可能となる。
【0045】
さらに、本実施形態のような構造のストロークシミュレータ2では、ピストン本体2aaに形成した複数本の溝部2ab内のコイル2acの巻回方向が隣り合うコイル2ac同士で互いに逆方向となるようにし、流れる電流の方向が逆方向となるようにしている。このため、以下の効果を奏することが可能となる。これについて、図3を参照して説明する。
【0046】
図3は、コイル2acへの通電時の様子を示した図2中の領域R1の部分拡大図である。この図に示すように、各コイル2acは、通電により、磁性体で構成されたピストン本体2aa、機能性流体2e、磁性体で構成されたシリンダ2bを通じる磁気回路を構成する。このときに形成される磁気回路中における磁界の向きは、隣り合う各コイル2acでの巻回方向が逆とされて電流の流れる方向が逆方向とされていることから、隣り合うコイル2ac同士で発生させる磁気回路の磁界向きが逆になる。このため、各コイル2acが発生させる磁気回路は繋がることなく分離された構成となり、各コイル2acそれぞれで、径方向においてピストン本体2aaからシリンダ2bに横切る磁気回路が生成される。そして、この部分において、機能性流体2eに含有された磁性粉末などがピストン本体2aaとシリンダ2bとの間を繋ぐように密集し、ピストン2aとシリンダ2bとの間のせん断抵抗が高くなる。
【0047】
これに対して、隣り合う各コイル2acの巻回方向を同じにして電流の流れる方向が同じになるようにすると、各コイル2acが分離されていても、全体で1つの磁気回路を構成することになり、全コイル2acの両先端位置でしか径方向においてピストン本体2aaからシリンダ2bに横切る磁気回路が生成されない。このため、この部分において、機能性流体2eに含有された磁性粉末などがピストン本体2aaとシリンダ2bとの間を繋ぐように密集し、ピストン2aとシリンダ2bとの間のせん断抵抗が高くなったとしても、隣り合う各コイル2acでの巻回方向を逆にして電流の流れる方向を逆方向にした場合よりもせん断抵抗を高くするのが難しい。
【0048】
このように、隣り合う各コイル2acでの巻回方向を逆にして電流が流れる方向が逆方向となるようにすることで、ピストン2aとシリンダ2bとの間のせん断抵抗をより高くすることが可能となる。したがって、より反力特性を広い範囲、つまりブレーキペダル1のストロークに対して小さい反力から大きな反力まで調整することが可能となる。
【0049】
(第2実施形態)
本発明の第2実施形態について説明する。本実施形態は、第1実施形態に対してストロークシミュレータ2の構成を変更したものであり、その他に関しては第1実施形態と同様であるため、第1実施形態と異なる部分について主に説明する。
【0050】
図4は、本実施形態にかかるストロークシミュレータ2の拡大断面図である。この図に示すように、本実施形態は、第1実施形態のストロークシミュレータ2に備えてあった溝部2abやコイル2acについては備えておらず、ピストン本体2aaの外周面と両シール部材2aeおよびシリンダ2bの内壁面によって構成される空間内に、機能性流体2eを備えた構造とし、ピストン本体2aaおよびシリンダ2bを導体にて構成した点が第1実施形態と相違している。そして、機能性流体2eとしては、絶縁体の微粒子を絶縁液体(例えばシリコンオイル)に加えたER流体(電気粘性流体)を用いている。
【0051】
このように構成されたストロークシミュレータ2では、ピストン本体2aaやシリンダ2bおよび機能性流体2eを経路とする電気回路を構成し、ピストン本体2aaとシリンダ2bとの間に電位差を発生させることにより、機能性流体2eの粘性を変化させ、ピストン2aとシリンダ2bとの間のせん断抵抗を変化させる。
【0052】
図5は、このときのピストン本体2aaとシリンダ2bとの間の様子を示した図4の領域R2の部分拡大図である。この図に示すように、ピストン本体2aaとシリンダ2bとの間に電位差を発生させることにより、これらの間に径方向の電場(電界)を発生させ、機能性流体2eに対して印加する。これにより、機能性流体2eの粘性が変化し、ピストン2aとシリンダ2bとの間のせん断抵抗を変化させることが可能となる。したがって、ストロークシミュレータ2の反力特性、つまりブレーキペダル1のストロークに対する反力の関係をピストン本体2aaとシリンダ2bとの間に発生させる電位差に応じて制御することが可能となる。
【0053】
このように、ピストン本体2aaとシリンダ2bとの間に機能性流体2eとしてER流体を充填し、ピストン本体2aaとシリンダ2bとの間に電位差を発生させるようにしても、第1実施形態と同様の効果を得ることができる。
【0054】
(第3実施形態)
本発明の第3実施形態について説明する。本実施形態は、第1実施形態のように磁場の発生に応じて粘度が変わる機能性流体を用いているが、ストロークシミュレータ2の構造を変更している。その他に関しては第1実施形態と同様であるため、第1実施形態と異なる部分について主に説明する。
【0055】
図6は、本実施形態にかかるストロークシミュレータ2の断面図である。この図に示すように、ストロークシミュレータ2は、回路構成部材2g、コイル2h、入力プレート2i、シール部材2j、機能性流体2kを有した構成とされている。
【0056】
回路構成部材2gは、磁性体からなり、一部を切り欠いてギャップ2gaを形成した環状部材によって構成されている。本実施形態では、この回路構成部材2gにより、磁気回路を構成する。コイル2hは、回路構成部材2gの少なくとも一部に巻回されており、通電により、回路構成部材2gを通じる経路に磁気回路を生成する。入力プレート2iは、磁性体からなり、図示しないが、一端がブレーキペダル1に連結されている。シール部材2jは、回路構成部材2gに形成されたギャップ2ga内において、回路構成部材2gと入力プレート2iとの間をシールしており、回路構成部材2gのうち入力プレート2iと対向する面の外縁を囲むように配置されている。これにより、回路構成部材2gのギャップ2ga内には、回路構成部材2gのうち入力プレート2iと対向する面と、入力プレート2iおよびシール部材2jとによって囲まれる空間が密閉されている。機能性流体2kは、回路構成部材2gのうち入力プレート2iと対向する面と、入力プレート2iおよびシール部材2jとによって囲まれる空間に充填されている。この機能性流体2kも、コイル2hへの通電により発生させられる磁場に応じて粘度を変化させる流体により構成されている。
【0057】
このように構成されるストロークシミュレータ2は、コイル2hへの通電により、回路構成部材2gのうち入力プレート2iの両側に配置される部分、つまり入力プレート2iと対抗する面と入力プレート2iとの間に磁場を発生させる。これにより、回路構成部材2gと入力プレート2iとの間に充填された機能性流体2kの粘度が変化し、回路構成部材2gと入力プレート2iとの間のせん断抵抗を変化させる。したがって、本実施形態のような構成のストロークシミュレータ2によっても、第1実施形態と同様の効果を得ることができる。
【0058】
(第4実施形態)
本発明の第4実施形態について説明する。本実施形態は、第2実施形態のように電場の発生に応じて粘度が変わる機能性流体を用いているが、ストロークシミュレータ2の構造を変更している。具体的には、ストロークシミュレータ2を第3実施形態に類似する構造としており、基本的な構造については第3実施形態と同様であるため、第3実施形態と異なる部分について主に説明する。
【0059】
図7は、本実施形態にかかるストロークシミュレータ2の断面図である。この図に示すように、本実施形態では、ストロークシミュレータ2を、回路構成部材2g、入力プレート2i、シール部材2j、機能性流体2kを有した構成としているが、第3実施形態に対して各部の材質を変更すると共に、回路構成部材2gの構造を変更し、さらにコイル2hをなくした構成としている。
【0060】
具体的には、回路構成部材2g、入力プレート2iを導体にて構成し、機能性流体2kをER流体としている。また、回路構成部材2gに対してギャップ2gaとは異なるギャップ2gbを形成し、このギャップ2gbを構成している回路構成部材2gの両側に電源から所定の電圧を印加することで、もう一方のギャップ2ga、つまり入力プレート2iの両側に電位差を発生させるようにしている。
【0061】
このような構成では、回路構成部材2gを経路として電気回路を構成し、回路構成部材2gのギャップ2gaの間において電位差に基づく電場を発生させる。これにより、回路構成部材2gと入力プレート2iとの間に配置された機能性流体2kの粘度が変化し、回路構成部材2gと入力プレート2iとの間のせん断抵抗を変化させる。したがって、本実施形態のような構成のストロークシミュレータ2によっても、第1実施形態と同様の効果を得ることができる。
【0062】
(他の実施形態)
上記各実施形態では、磁気回路もしくは電気回路を構成し、磁場もしくは電場の変化によって機能性流体2e、2kの粘度を変化させることができるストロークシミュレータ2の構造の一例を示した。しかしながら、上記各実施形態で説明した構造は、本発明が適用されるストロークシミュレータ2の一例を示したに過ぎず、他の構造を採用することもできる。
【0063】
すなわち、上記第1、第2実施形態では、ピストン2aとシリンダ2bとの間に機能性流体2eを配置し、シリンダ2bの内周面を対向面としたせん断抵抗に基づいてブレーキペダル1のストロークに対する反力を発生させるようにしている。また、第3、第4実施形態では、入力プレート2iの両側に回路構成部材2gが配置されるようにし、回路構成部材2gのうち入力プレート2iと対向する面を対向面としたせん断抵抗に基づいてブレーキペダル1のストロークに対する反力を発生させるようにしている。これらは、操作部材によって移動させられる入力部材(ピストン2aや入力ロッド2d)を円筒状の対向面形成部材(シリンダ2b)で囲んだ構造、もしくは、入力部材(入力プレート2i)の両側を対向面形成部材(回路構成部材2g)で挟み込んだ構造としたものである。
【0064】
これに対して、入力部材と対向面形成部材との間に機能性流体が配置され、この機能性流体の粘度を磁場または電場の変化によって制御し、入力部材と対向面形成部材との間のせん断抵抗が変化させられるような構造であれば、他の構造であっても構わない。
【0065】
例えば、第1、第2実施形態で説明したようなピストン2aを円柱形状から四角柱形状に変更し、シリンダ2bを円筒形状からピストン2aの外周面を囲む四角筒形状に変更しても良い。また、第3、第4実施形態のように入力プレート2iの両側を回路構成部材2gで挟み込み、入力プレート2iの両面に機能性流体2kを配置するのではなく、入力プレート2iの片面のみに機能性流体2kを配置した構造としても良い。また、ピストン2aとシリンダ2bとの間の一周全域において機能性流体2eを充填するようにしたが、そのうちの一部にのみ機能性流体2eが配置されるような構造であっても構わない。
【0066】
また、回路構成部材2gは、上記したようなギャップ2ga、2gbを有する環状部材とする必要はなく、入力プレート2iおよび機能性流体2kが相対移動させられる対向面が構成されるものであれば良く、単なる板状部材であっても構わない。
【0067】
さらに、第1、第2実施形態のようなピストン2aやシリンダ2bを多重構造とし、多重構造とした各ピストン2aが多重構造とされた各シリンダ2bの間に順に入れ子のように配置される構造とし、各ピストン2aと各シリンダ2bとの間に機能性流体2eを充填した構造としても良い。同様に、第3、第4実施形態のような入力プレート2iや回路構成部材2gも板状部材が複数枚重ねられた構造となるようにし、各入力プレート2iと回路構成部材2gの間に機能性流体2kを充填した構造としても良い。
【0068】
また、上記第1実施形態では、ピストン本体2aaの外周面に複数本の溝部2abを備え、隣り合う各溝部2abに配置されるコイル2acに流れる電流の方向が互いに逆方向になるようにしたが、隣り合う各溝部2abすべてにおいて流れる電流の方向が逆になっている必要はない。例えば、溝部2abの2個おきにコイル2acの流れる電流の方向が逆になるようにしたり、複数の溝部2abのうちの一部に配置されるコイル2acのみが残りの溝部2abに配置されるコイル2acと流れる電流の方向が逆になっている構成であっても良い。また、コイル2acの巻回方向を逆方向とすることで流れる電流の方向が逆となるようにしたが、コイル2acの巻回方向を同方向として流れる電流の方向が逆となるようにしても良い。
【符号の説明】
【0069】
1…ブレーキペダル、2…ストロークシミュレータ、2a…ピストン、2aa…ピストン本体、2ab…溝部、2ac…コイル、2ad…シール溝、2ae…シール部材、2b…シリンダ、2c…スプリング、2d…入力ロッド、2da…クレビス、2e…機能性流体、2f…シリンダケース、2fa…ケース本体、2fb…ケース上部、2fc…スプリング保持部、2fd…保持プレート、2fe…ネジ、2g…回路構成部材、2ga…ギャップ、2gb…ギャップ、2h…コイル、2i…入力プレート、2j…シール部材、2k…機能性流体、3…M/C、4…電動モータ、5…ギア機構、6…アクチュエータ、7a〜7d…W/C
【特許請求の範囲】
【請求項1】
操作力に基づいて操作部材(1)がストロークされると、該ストロークに基づいて移動させられる入力部材(2a、2d、2i)と、
前記入力部材(2a、2d、2i)と対向する面を有し、前記入力部材(2a、2d、2i)と相対移動可能な対向面形成部材(2b、2g)と、
前記入力部材(2a、2d、2i)と前記対向面形成部材(2b、2g)との間の空間を密閉するシール部材(2ae、2j)と、
前記入力部材(2a、2d、2i)と前記対向面形成部材(2b、2g)および前記シール部材(2ae、2j)によって密閉された空間に充填され、磁場もしくは電場の変化に基づいて粘度を変化させる機能性流体(2e、2k)とを有し、
前記入力部材(2a、2d、2i)が前記ストロークに基づいて移動させられると、前記入力部材(2a、2d、2i)と一体となって前記シール部材(2ae、2j)および前記機能性流体(2e、2k)も移動させられ、
前記入力部材(2a、2d、2i)と前記対向面形成部材(2b、2g)の間に磁場もしくは電場を発生させて前記機能性流体(2e、2k)の粘度を制御することで、前記入力部材(2a、2d、2i)と前記対向面形成部材(2b、2g)の間のせん断抵抗を制御することを特徴とするストロークシミュレータ。
【請求項2】
前記入力部材は、ピストン(2a)が備えられた構成とされ、
前記対向面形成部材は、前記ピストン(2a)を収容するシリンダ(2b)が備えられた構成とされ、
前記ピストン(2a)の外周面と前記シリンダ(2b)の内周面との間に、前記シール部材(2ae)および前記機能性流体(2e)が配置されていることを特徴とする請求項1に記載のストロークシミュレータ。
【請求項3】
前記機能性流体(2e)は、磁性流体もしくは磁気粘性流体とされ、
前記シリンダ(2b)は、磁性体で構成され、
前記ピストン(2a)は、外周面を一周する複数本の溝部(2ab)が形成された磁性体で構成されるピストン本体(2aa)と、前記複数本の溝部(2a)それぞれに巻回されたコイル(2ac)とを有した構成とされ、該コイル(2ac)に流れる電流の方向が互いに逆方向とされたものが含まれ、
前記コイル(2ac)への通電により、前記ピストン本体(2aa)と前記機能性流体(2e)および前記シリンダ(2b)を通じる磁気回路を構成することを特徴とする請求項2に記載のストロークシミュレータ。
【請求項4】
前記ピストン(2a)は、円柱状部材で構成され、
前記シリンダ(2b)は、円筒状部材で構成されていることを特徴とする請求項3に記載のストロークシミュレータ。
【請求項5】
前記ピストン(2a)は、四角柱状部材で構成され、
前記シリンダ(2b)は、四角筒状部材で構成されていることを特徴とする請求項3に記載のストロークシミュレータ。
【請求項6】
前記操作部材としてブレーキ操作部材(1)を有すると共に、
前記ブレーキ操作部材(1)のストロークを検出するストロークセンサ(1a)および/または踏力センサ(1b)と、
前記ストロークセンサ(1a)および/または踏力センサ(1b)で検出されたストロークおよび/または踏力に対応するブレーキ液圧であるマスタシリンダ圧を発生させるマスタシリンダ(3)と、
前記マスタシリンダ圧に対応するブレーキ液圧としてホイールシリンダ圧を発生させるホイールシリンダ(7a〜7d)と、
前記ストロークセンサ(1a)および/または踏力センサ(1b)で検出されたストロークおよび/または踏力に基づいて、前記マスタシリンダ(3)にマスタシリンダ圧を発生させる制御部(8)とを有し、
請求項1ないし5のいずれか1つに記載のストロークシミュレータにおける前記入力部材(2a、2d、2i)が前記ブレーキ操作部材(1)に連結されており、前記ブレーキ操作部材(1)のストロークおよび/または踏力に基づいて前記入力部材(2a、2d、2i)が移動させられるように構成されていることを特徴とする車両用ブレーキ装置。
【請求項1】
操作力に基づいて操作部材(1)がストロークされると、該ストロークに基づいて移動させられる入力部材(2a、2d、2i)と、
前記入力部材(2a、2d、2i)と対向する面を有し、前記入力部材(2a、2d、2i)と相対移動可能な対向面形成部材(2b、2g)と、
前記入力部材(2a、2d、2i)と前記対向面形成部材(2b、2g)との間の空間を密閉するシール部材(2ae、2j)と、
前記入力部材(2a、2d、2i)と前記対向面形成部材(2b、2g)および前記シール部材(2ae、2j)によって密閉された空間に充填され、磁場もしくは電場の変化に基づいて粘度を変化させる機能性流体(2e、2k)とを有し、
前記入力部材(2a、2d、2i)が前記ストロークに基づいて移動させられると、前記入力部材(2a、2d、2i)と一体となって前記シール部材(2ae、2j)および前記機能性流体(2e、2k)も移動させられ、
前記入力部材(2a、2d、2i)と前記対向面形成部材(2b、2g)の間に磁場もしくは電場を発生させて前記機能性流体(2e、2k)の粘度を制御することで、前記入力部材(2a、2d、2i)と前記対向面形成部材(2b、2g)の間のせん断抵抗を制御することを特徴とするストロークシミュレータ。
【請求項2】
前記入力部材は、ピストン(2a)が備えられた構成とされ、
前記対向面形成部材は、前記ピストン(2a)を収容するシリンダ(2b)が備えられた構成とされ、
前記ピストン(2a)の外周面と前記シリンダ(2b)の内周面との間に、前記シール部材(2ae)および前記機能性流体(2e)が配置されていることを特徴とする請求項1に記載のストロークシミュレータ。
【請求項3】
前記機能性流体(2e)は、磁性流体もしくは磁気粘性流体とされ、
前記シリンダ(2b)は、磁性体で構成され、
前記ピストン(2a)は、外周面を一周する複数本の溝部(2ab)が形成された磁性体で構成されるピストン本体(2aa)と、前記複数本の溝部(2a)それぞれに巻回されたコイル(2ac)とを有した構成とされ、該コイル(2ac)に流れる電流の方向が互いに逆方向とされたものが含まれ、
前記コイル(2ac)への通電により、前記ピストン本体(2aa)と前記機能性流体(2e)および前記シリンダ(2b)を通じる磁気回路を構成することを特徴とする請求項2に記載のストロークシミュレータ。
【請求項4】
前記ピストン(2a)は、円柱状部材で構成され、
前記シリンダ(2b)は、円筒状部材で構成されていることを特徴とする請求項3に記載のストロークシミュレータ。
【請求項5】
前記ピストン(2a)は、四角柱状部材で構成され、
前記シリンダ(2b)は、四角筒状部材で構成されていることを特徴とする請求項3に記載のストロークシミュレータ。
【請求項6】
前記操作部材としてブレーキ操作部材(1)を有すると共に、
前記ブレーキ操作部材(1)のストロークを検出するストロークセンサ(1a)および/または踏力センサ(1b)と、
前記ストロークセンサ(1a)および/または踏力センサ(1b)で検出されたストロークおよび/または踏力に対応するブレーキ液圧であるマスタシリンダ圧を発生させるマスタシリンダ(3)と、
前記マスタシリンダ圧に対応するブレーキ液圧としてホイールシリンダ圧を発生させるホイールシリンダ(7a〜7d)と、
前記ストロークセンサ(1a)および/または踏力センサ(1b)で検出されたストロークおよび/または踏力に基づいて、前記マスタシリンダ(3)にマスタシリンダ圧を発生させる制御部(8)とを有し、
請求項1ないし5のいずれか1つに記載のストロークシミュレータにおける前記入力部材(2a、2d、2i)が前記ブレーキ操作部材(1)に連結されており、前記ブレーキ操作部材(1)のストロークおよび/または踏力に基づいて前記入力部材(2a、2d、2i)が移動させられるように構成されていることを特徴とする車両用ブレーキ装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−6522(P2013−6522A)
【公開日】平成25年1月10日(2013.1.10)
【国際特許分類】
【出願番号】特願2011−140549(P2011−140549)
【出願日】平成23年6月24日(2011.6.24)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【Fターム(参考)】
【公開日】平成25年1月10日(2013.1.10)
【国際特許分類】
【出願日】平成23年6月24日(2011.6.24)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【Fターム(参考)】
[ Back to top ]