
スパッタリング装置
【課題】対象物を静電吸着ステージから脱離させる際に対象物の跳びはね、破損、剥離帯電、位置ずれ等の問題を発生させないようにする。
【解決手段】誘電体ブロック12内の一対の吸着電極131,132に吸着電源141,142によって互いに極性の異なる直流電圧を印加して静電吸着面10に静電気を誘起して板状の対象物9を静電吸着する。対象物9を脱離機構15で静電吸着面10から脱離させる際には、静電吸着力とは逆向きの機械的な圧力であって残留吸着力より小さい予圧を対象物9に与え、吸着電源141,142をオフにした後、静電吸着の際とは逆極性の電圧を一対の吸着電極131,132に印加して誘電体ブロック12に逆電界を設定する。逆電界設定によって誘電体ブロック2内の残留電荷が急速に緩和され、残留電荷がゼロになる直前で予圧によって対象物9は静電吸着面10から離間し、対象物9に作用する残留吸着力はゼロになる。
【解決手段】誘電体ブロック12内の一対の吸着電極131,132に吸着電源141,142によって互いに極性の異なる直流電圧を印加して静電吸着面10に静電気を誘起して板状の対象物9を静電吸着する。対象物9を脱離機構15で静電吸着面10から脱離させる際には、静電吸着力とは逆向きの機械的な圧力であって残留吸着力より小さい予圧を対象物9に与え、吸着電源141,142をオフにした後、静電吸着の際とは逆極性の電圧を一対の吸着電極131,132に印加して誘電体ブロック12に逆電界を設定する。逆電界設定によって誘電体ブロック2内の残留電荷が急速に緩和され、残留電荷がゼロになる直前で予圧によって対象物9は静電吸着面10から離間し、対象物9に作用する残留吸着力はゼロになる。
【発明の詳細な説明】
【技術分野】
【0001】
本願の発明は、板状の対象物を静電吸着する静電吸着ステージに関するものであり、また、このような静電吸着ステージによって対象物としての基板を保持して基板の表面に所定の処理を施す基板処理装置に関するものである。
【背景技術】
【0002】
対象物を静電気により吸着する静電吸着の技術は、半導体ウェーハや液晶基板等の基板(製品の基になる板状物の総称)を処理する装置において多用されている。例えば、基板の表面に所定の薄膜を作成するスパッタリング装置やプラズマ化学蒸着(CVD)装置、プラズマの作用を利用して基板の表面を所定のパターンでエッチングするプラズマエッチング装置等の基板処理装置では、基板を静電吸着ステージに静電吸着して処理を行っている。
【0003】
静電吸着ステージは、表面が対象物を静電吸着する面になっている誘電体ブロックと、誘電体ブロック内に埋設された吸着電極と、吸着電極に静電吸着用の電圧を印加する吸着電源とから主に構成されている。通常、一対又は複数対の吸着電極が設けられており、吸着電源は、対を成す吸着電極に対して直流電圧を与える。この結果、誘電体ブロックの表面に静電気が誘起され、対象物が静電吸着される。
【0004】
上述したような基板処理装置は、真空中で又は所定の雰囲気中で基板を処理するため、多くの場合、気密な処理容器内に上記静電吸着ステージを備えている。そして、搬送ロボットによって処理容器内に基板を搬送し、静電吸着ステージに載置して静電吸着している。そして、処理終了後は、基板を静電吸着ステージから受け取って処理容器から搬出するようにしている。
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記従来の静電吸着ステージにおいて、対象物を静電吸着ステージから取り去る際には、吸着電源の動作を停止させ、吸着電極への電圧印加を解消した状態とする。しかしながら、電圧印加解消後も誘電体ブロックの電荷はすぐには解消せず、静電吸着面には多くの電荷が残留している。このため、対象物を静電吸着面から脱離させようとしても、残留電荷による静電吸着力(以下、残留吸着力)のために対象物が脱離しないことがある。また、無理矢理対象物を脱離させようとすると、対象物が跳びはねたり、最悪の場合には対象物が破損してしまうことがある。
【0006】
また、静電吸着面に残留電荷がある状態で対象物を脱離させると、剥離帯電と同じメカニズムで対象物の裏面が帯電してしまう問題がある。対象物が製品の基になる基板である場合、裏面が帯電すると、そこに多くの塵埃が吸い寄せられ、吸い寄せられた塵埃が基板の表面側に周り込む結果、基板の表面を汚損する恐れがある。このような基板の汚損は、製品不良の原因となる場合がある。
【0007】
さらに、対象物としての基板を搬送ロボットで自動搬送する基板処理装置等において、残留吸着力より静電吸着されている基板を無理矢理脱離させようとすると、反動で基板の位置ずれが生じる。この結果、搬送ロボットに基板を受け渡すことができなくなる事故が発生する恐れもある。
【0008】
このような問題を避ける方法として、吸着電極への電圧印加解消後、残留電荷が自然消滅する時間をおいてから対象物を脱離させる方法が考えられる。しかしながら、自然消滅するまでには30秒〜60秒程度の時間を要し、脱離終了までに長時間を要する欠点がある。特に、静電吸着ステージが基板処理装置のような生産設備に使用される場合、スループットの悪化等の生産性低下の原因になる。
【0009】
また、別の方法として、一対の吸着電極に対して静電吸着の際とは互いに逆極性の電圧を印加して残留電荷を早急に解消させる方法も考えられる。即ち、一対の吸着電極のうち、静電吸着の際には、一方の吸着電極に正電圧を、他方の吸着電極には負電圧を印加する。そして、脱離の際には、一方の吸着電極に負電圧を、他方の吸着電極には正電圧を印加する。誘電ブロックには逆電界が設定されるため、残留電荷が短時間に解消するメリットがある。
【0010】
しかしながら、上記方法も、次のような欠点がある。まず、脱離の際に逆電界を設定した場合、逆電界設定によって残留電荷は減少し、あるタイミングでゼロになるものの、それ以上に逆電界設定を続けると、今度は逆方向に誘電体ブロックが充電されてしまい、静電吸着面には逆極性の電荷が発生してしまう。従って、この方法を実現するには、残留電荷が丁度ゼロになるタイミングで逆電界設定を停止させる必要がある。しかしながら、この残留電荷がゼロになっている時間の幅は非常に短く、このタイミングで精度良く逆電界設定を停止させるのは困難である。
【0011】
また、上記方法を実現するには、残留電荷がゼロになるまでの時間を予め実験的に求めておき、そのタイミングで逆電界設定を停止させるシーケンスを採用することになる。しかしながら、残留電荷がゼロになるまでの時間は色々な要因によって変化するため、残留電荷ゼロの状態で逆電界設定を停止させるのは実際には難しい。例えば、残留電荷がゼロになるまでの時間は、誘電体ブロックの体積抵抗に大きく影響されるが、この体積抵抗は温度により変化する。基板処理装置における静電吸着ステージは、処理中に基板が所定の温度になるように加熱又は冷却されて温度制御されていることが多く、その温度は処理の種類によって異なる。従って、残留電荷がゼロになるまでの時間も処理の種類によって異なることになる。残留電荷がゼロになるまでの時間を、処理の種類に応じた静電吸着ステージの各温度に従って予め求めておくことは困難かつ面倒である。
【0012】
また、誘電体ブロックの体積抵抗は、その製造上の理由からばらつくことが避けられない。従って、残留電荷がゼロになるまでの時間は、使用する静電吸着ステージにより少しずつ変化してしまう。また、基板処理装置では、残留電荷がゼロになるまでの時間は、基板の表面状態によっても変わってしまう。例えば、基板が単なるシリコンウェーハ(ベアシリコン)の場合と、シリコンウェーハの表面に酸化シリコン等の絶縁膜が形成されている場合とでは、残留電荷がゼロになるまでの時間は微妙に変わってしまう。
【0013】
さらに、対象物としての基板を搬送ロボットにより自動搬送する基板処理装置等では、静電吸着ステージと搬送ロボットとの間の基板の受け渡しは、静電吸着ステージに設けた複数の昇降ピンにより行われることが多い。この場合、基板への昇降ピンの当接箇所は複数になるが、上記方法において残留電荷が消滅するタイミングはそれら複数の当接箇所において同時になることは殆どない。従って、ある箇所で残留電荷がゼロになったタイミングを捉えて基板を脱離させても、他の箇所ではまだ残留電荷があり、その箇所では昇降ピンが無理矢理基板を脱離させることになる。この結果、基板の跳びはね、破損、剥離帯電、位置ずれ等が生ずる恐れがある。
【0014】
本願の発明は、このような課題を解決するためになされたものであり、対象物を静電吸着ステージから脱離させる際に対象物の跳びはね、破損、剥離帯電、位置ずれ等の問題を発生させないという技術的意義を有する。
【課題を解決するための手段】
【0015】
本発明は、処理容器と、
前記処理容器内にプロセスガスを導入するためのガス導入手段と、
前記処理容器内に被スパッタ面が露出するように設けられたターゲットと、
誘電体ブロックと該誘電体ブロック内に設けられた吸着電極と有し、基板を保持するための静電吸着ステージと、
該誘電体ブロックに静電吸着用の電界とは逆向きの電界を設定するための逆電界設定機構と、
静電吸着面から基板を離間させるために機械的な圧力を対象物に与えるための予圧機構と、
を具備し、
前記吸着電極への印加電圧を停止にした後、
前記予圧機構を作動して基板に機械的圧力を印加し、その後、前記逆電界設定機構により、該静電吸着用の電界とは逆向きの電界を前記静電吸着ブロックに与えるように構成されていることを特徴とするスパッタリング装置である。
【発明の効果】
【0016】
本発明に係る静電吸着ステージによれば、静電吸着面に残留吸着力が無いか又はあっても影響を受けない状態で対象物が静電吸着面から脱離するので、対象物の跳びはね、破損、位置ずれ、剥離帯電等の問題が生じない。また、対象物に機械的な予圧をかけた状態で逆電界を設定して残留電荷を緩和するので、残留電荷がゼロになる直前に予圧によって対象物が静電吸着面から自動的に離間する。従って、誘電体ブロックが逆極性に誘電分極され始めても、対象物にはこの逆極性の誘電分極による残留吸着力は作用しない。このため、残留電荷が丁度ゼロになるタイミングで逆電界設定を停止させる必要はなく、極めて実用性の高い静電吸着ステージが提供される。また、予圧を対象物の自重による圧力より大きくすることで、上記効果に加え、残留電荷がゼロになった場合でも対象物の自重により対象物が静電吸着面から離間しないという問題は生じない。また、対象物と静電吸着面との離間距離を0.1mm〜1.0mmとすることにより、上記効果に加え、対象物がクーロン力等により静電吸着面から離間しないという問題や、対象物が急激に離間して跳びはねるといった問題は生じない。また、本発明によれば、基板処理装置において上記発明の効果と同様の効果を得ることができ、基板の跳びはね、破損による歩留まりの低下、位置ずれによる基板搬送エラーの事故、剥離帯電による基板の汚損等の問題が生じない実用的な装置が提供される。
【図面の簡単な説明】
【0017】
【図1】静電吸着ステージの発明の実施形態の概略を示す正面断面図である。
【図2】静電吸着ステージの発明の実施形態の概略を示す平面図である。
【図3】図1の静電吸着ステージに設けられた予圧機構について説明する図であり、図1に示す昇降ピン151の断面構造を示す概略図である。
【図4】図1から図3に示す実施形態の静電吸着ステージの動作について説明するタイミングチャートである。
【図5】対象物9の脱離の際の予圧機構の動作について説明する図である。
【図6】基板処理装置の発明の実施形態であるスパッタリング装置を示した正面断面概略図である。
【図7】図7は、図6に示す装置における静電吸着ステージ1の脱離機構15の動作について説明する図である。
【図8】図6に示す基板処理装置の実施形態における予圧機構の動作について説明する図である。
【図9】図6から図8に示す実施形態の装置における静電吸着ステージ1からの基板90の脱離動作について説明するタイミングチャートである。
【発明を実施するための形態】
【0018】
以下、本願発明の実施の形態について説明する。まず、静電吸着ステージの発明の実施形態について説明する。図1及び図2は静電吸着ステージの発明の実施形態の概略を示す図であり、図1は正面断面図、図2は平面図である。図1及び図2に示す静電吸着ステージは、金属製のステージ本体11と、表面が静電吸着面10である誘電体ブロック12と、誘電体ブロック12内に設けられた吸着電極131,132とから主に構成されている。
【0019】
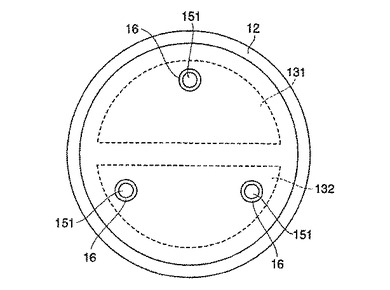
誘電体ブロック12は、アルミナ等の誘電体製である。本実施形態では、二極方式の構成が採用されており、従って吸着電極131,132は一対のものである。一対の吸着電極131,132は図2に示すように半円板状であり、静電吸着面10と平行な面に沿って設けられている。
【0020】
また、静電吸着ステージは、吸着電極131,132に所定の電圧を印加して誘電体ブロック12に静電吸着用の電界を設定する吸着電源141,142を備えている。吸着電源141,142は二つ設けられており、一対の吸着電極131,132に極性が互いに異なり大きさが同じである直流電圧を印加するようになっている。尚、ステージ本体11はアースされている。二つの吸着電源141,142が動作すると、一対の吸着電極131,132の間には静電吸着用の電界として直流電界が設定され、この電界によって静電吸着面10に静電気が誘起されて対象物9が静電吸着されるようになっている。
【0021】
静電吸着のメカニズムとしては、二つのものが知られている。一つは、クーロン力によるものであり、もう一つはジョンソンラーベク力によるものである。ジョンソンラーベク力は、微小な領域に電流が集中することにより生ずる吸着力である。即ち、静電吸着面10や対象物9の裏面は、微視的には小さな凹凸があり、対象物9が静電吸着面10に載置された際には、これらの凹凸が接触している。吸着電源141,142が動作して静電吸着面10に静電気が誘起されると、これらの微小な凹凸の接触箇所に電流が集中して流れ、この結果、ジョンソンラーベク力による吸着力が生ずる。本実施形態のような静電吸着ステージは、クーロン力よりもジョンソンラーベク力の方が支配的であり、主にジョンソンラーベク力により静電吸着が成される。
【0022】
また、静電吸着ステージは、対象物9を静電吸着面10から脱離させる脱離機構15を備えている。脱離機構15は、主に静電吸着ステージ内で昇降する複数の昇降ピン151と、複数の昇降ピン151を一体に保持したピン保持板152と、ピン保持板152を駆動して複数の昇降ピン151を一体に昇降させるピン駆動部153等から構成されている。図1及び図2に示すように、静電吸着ステージには、上下方向に長いピン用通路16が形成されている。昇降ピン151はこのピン用通路16内に位置して昇降するようになっている。尚、図2に示すように、ピン用通路16は三つ設けられており、それらの位置は静電吸着ステージの中心と同心である正三角形の頂点の位置となっている。そして、それらピン用通路16の各々に昇降ピン151が設けられており、従って三つの昇降ピン151が設けられている。
【0023】
ピン保持板152は、水平な姿勢で設けられており、各昇降ピン151の下端を固定して保持している。ピン駆動部153には、サーボモータとボールねじを組み合わせた機構が採用されている。サーボモータを動作させると、ピン保持板152は不図示の回転規制部によって回転しないようになっているので、ボールねじによって回転運動が上下運動に変換されてピン保持板152が上下に移動する。この結果、各昇降ピン151が同時に昇降するようになっている。サーボモータとしては位置制御用の高精度のものが好適であり、昇降ピン151を上下方向の任意の位置で停止させられるようにすることが好ましい。
【0024】
上述した構成の静電吸着ステージに対象物9を静電吸着させる場合、ピン駆動部153によって各昇降ピン151を所定の上限位置に位置させる。この上限位置では、各昇降ピン151は静電吸着面10から突出している。この状態で、各昇降ピン151の上に対象物9を載せ、ピン駆動部153を動作させて各昇降ピン151を下限位置まで下降させる。下限位置では、各昇降ピン151の先端は静電吸着面10よりも下方に位置する状態となる。従って、各昇降ピン151が上限位置から下降位置まで下降する際、対象物9は静電吸着面10の上に載る。この状態で、上述したように一対の吸着電源141,142を動作させると、対象物9は静電吸着面10に静電吸着される。
【0025】
対象物9を静電吸着面10から脱離させる際には、上記とは逆の動作になる。即ち、ピン駆動部153を動作させて各昇降ピン151を下限位置から上限位置まで上昇させる。この上昇の際、各昇降ピン151は対象物9を静電吸着面10から持ち上げるよう動作する。そして、各昇降ピン151が上限位置に達すると、対象物9も上限位置に位置することになる。これにより、対象物9の脱離動作が終了する。
【0026】
また、本実施形態の静電吸着ステージは、上記対象物9の脱離の際に残留電荷を少なくするため、逆電界設定機構17を備えている。逆電界設定機構17は、誘電体ブロック12に静電吸着用の電界とは逆向きの電界を設定するものである。本実施形態では、静電吸着用の電界を設定する一対の吸着電源141,142を逆電界設定機構17に兼用している。即ち、逆電界設定機構17は、一対の吸着電源141,142の吸着電極131,132に対する接続を逆にするスイッチ回路171と、スイッチ回路171を駆動するスイッチ駆動部172とから主に構成されている。
【0027】
スイッチ回路171は、OPアンプIC等の半導体素子を利用した回路又はリレー等が使用される。スイッチ駆動部172は、対象物9の静電吸着の際には、例えば、正電圧印加の吸着電源(以下、正電源)141を一方の吸着電極131に接続し、負電圧印加の吸着電源(以下、負電源)142を他方の吸着電極132に接続するようスイッチ回路171を駆動する。そして、対象物9の脱離の際には、正電源141を他方の吸着電極132に接続し、負電源142を一方の吸着電極131に接続するようスイッチ回路171を駆動する。これにより、誘電体ブロック12には静電吸着時とは逆向きの電界が設定されるようになっている。
【0028】
本実施形態の静電吸着ステージの大きな特徴点は、対象物9の脱離の際、所定の機械的な圧力を対象物9に与える予圧機構が設けられている点である。以下、この点を詳説する。予圧機構は、対象物9を静電吸着ステージから脱離させる際、静電吸着面10の残留電荷による残留吸着力よりも大きさが小さくて静電吸着力とは逆向きの機械的な圧力を脱離の前に予め対象物9に与えるものである。本実施形態では、構造を簡略化するため、脱離機構15を兼用して予圧機構としている。
【0029】
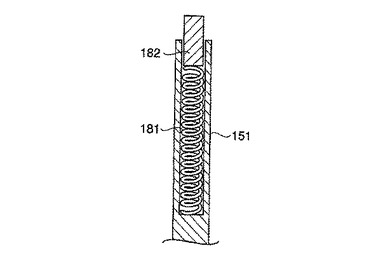
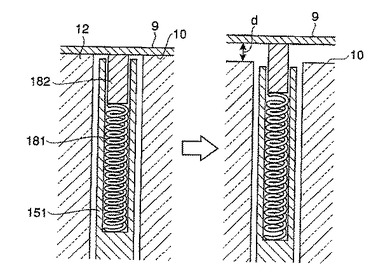
図3は、図1の静電吸着ステージに設けられた予圧機構について説明する図であり、図1に示す昇降ピン151の断面構造を示す概略図である。図3に示すように、昇降ピン151は上端側が中空状である。そして、この中空の部分には、コイルスプリング181と、コイルスプリング181の上端に固定された可動ヘッド182とが設けられている。コイルスプリング181の下端は、昇降ピン151の非中空部分に固定されている。図2に示すように本実施形態では三つの昇降ピン151が設けられているが、それぞれ同じ構成のコイルスプリング181及び可動ヘッド182が設けられている。
【0030】
コイルスプリング181が自由長の状態にあるとき、可動ヘッド182は昇降ピン151の上端開口から少し突出した状態になる。前述したように脱離機構15が動作して昇降ピン151が上昇すると、可動ヘッド182が対象物9の裏面に当接する。そしてさらに昇降ピン151が上昇すると、対象物9は残留吸着力によって静電吸着面10に吸着されているために可動ヘッド182がコイルスプリング181をその弾性に逆らって縮めるよう作用する。昇降ピン151が適当な上昇位置で停止すると、残留吸着力よりも大きさが小さくて残留吸着力とは逆向きの圧力がコイルスプリング181の弾性によって対象物9に与えられることになる。以下、この上昇位置を本実施形態の説明において「予圧位置」と呼ぶ。
【0031】
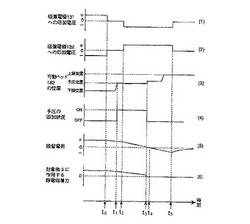
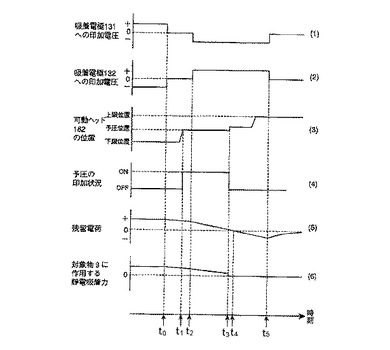
次に、上記構成に係る本実施形態の静電吸着ステージの動作について、図4を使用してさらに詳しく説明する。図4は、図1から図3に示す実施形態の静電吸着ステージの動作について説明するタイミングチャートである。図4中、(1)は吸着電極131への印加電圧を、(2)は吸着電極132への印加電圧を、(3)は可動ヘッド182の位置を、(4)は予圧の印加状況を、(5)は誘電体ブロック12の残留電荷を、(6)は対象物9に作用する静電吸着力についてそれぞれ時系列的に示している。
【0032】
まず、対象物9を静電吸着する場合には、前述した通り対象物9を静電吸着ステージの静電吸着面10の上に載せ、一対の吸着電源141,142を動作させる。これによって対象物9が静電吸着面10に静電吸着される。対象物9を静電吸着面10から脱離させる動作は、以下の手順で行う。まず、時刻t0にて、一対の吸着電源141,142の動作を停止させる。この結果、一対の吸着電極131,132への印加電圧は0Vということになる。この際、一対の吸着電極131,132は接地電位ではあるものの、誘電体ブロック12にはまだ残留電荷が多く存在しており、対象物9は残留吸着力によって静電吸着面10に吸着されている。
【0033】
そして、時刻t1において脱離機構15のピン駆動部153を動作させ、昇降ピン151が下限位置から予圧位置に位置するよう昇降ピン151を上昇させる。この結果、前述したように、対象物9が残留吸着力によって吸着されつつもそれとは逆向きの機械的な圧力が対象物9に与えられた状態となる。その後、スイッチ駆動部172がスイッチ回路171を駆動させ、一対の吸着電極131,132に対する一対の吸着電源141,142の接続状態を互いに逆にする。そして、時刻t2において一対の吸着電源141,142に動作を再開させる。この結果、一対の吸着電極131,132を介して誘電体ブロック12に静電吸着用の電界とは逆向きの電界が設定される。この逆向きの電界によって、誘電体ブロック12の残留電荷は、図4(5)に示すように急速に緩和されて減少する。
【0034】
逆電界の印加が続くと、時刻t4において残留電荷がやがてゼロになる。この時刻t4 を過ぎると、誘電体ブロック12が逆極性に充電されて図4(5)に示すように逆極性の電荷が生ずるようになる。しかしながら、本実施形態の静電吸着ステージにおいて重要な点は、対象物9に残留吸着力とは逆向きの予圧が与えられているので、残留電荷がゼロになった時点では予圧によって対象物9が静電吸着面10から離間し、逆極性の電荷によっては静電吸着されない点である。この点について、図4に加え図5を使用して説明する。図5は、対象物9の脱離の際の予圧機構の動作について説明する図である。
【0035】
図5(1)に示すように、対象物9に予圧が印加されている状態では、予圧機構のコイルスプリング181はその弾性に逆らって圧縮されている状態である。上述したように、誘電体ブロック12の残留電荷の減少に伴い、対象物9に作用する残留吸着力も急速に減少する。そして、時刻t4の前のt3においては、残留吸着力と予圧とが等しくなる。この時刻t3又はこの時刻t3を過ぎたとたんに、図5(2)に示すように、昇降ピン151内のコイルスプリング181の弾性により対象物9が少し持ち上がって静電吸着面10から離間する。
【0036】
対象物9が静電吸着面10から離間すると、誘電体ブロック12と対象物9との間に電流は流れなくなるので、ジョンソンラーベク力による静電吸着力はゼロになる。前述したように本実施形態のような静電吸着ステージではジョンソンラーベク力による静電吸着力が支配的であるから、対象物9が静電吸着面10から離間することにより、対象物9に作用する静電吸着力は激減する。このため、対象物9に作用する力は殆どコイルスプリング181の弾性のみになる。コイルスプリング181はその自由状態に近い長さになるまでに伸張し、対象物9はその分だけ上昇する。そして、対象物9の自重とコイルスプリング181の弾性と釣り合いが取れた位置(以下、離間位置)で対象物9の上昇が停止する。
【0037】
尚、対象物9が静電吸着面10から離間してもクーロン力による静電吸着力は対象物9に作用している。しかしながら、周知のようにクーロン力は距離の二乗に反比例して小さくなる。本実施形態においては、上記離間位置の静電吸着面10からの距離(図5中dで示す)が充分長くなるようコイルスプリング181の弾性力が設定されており、離間位置において対象物9に作用するクーロン力は無視できる程度に小さい。
【0038】
また、対象物9が静電吸着面10から離間するタイミングは、各昇降ピン151において同じになるとは限らない。これは、静電吸着面10の残留吸着力は完全に均一な度合いで減少するとは限らないからである。即ち、三つの昇降ピン151において、まず一つの昇降ピン151が当接している箇所で最初に離間が生じ、次に、別の一つの昇降ピン151が当接している箇所で離間が生じ、最後に、残りの一つの昇降ピン151が当接している箇所で離間が生ずる場合もある。いずれにしても、充分な時間の経過後には、三つの昇降ピン151の当接箇所すべてで離間が生じ、対象物9は静電吸着面10から完全に離間する。
【0039】
このようにして、対象物9が静電吸着面10から離間して離間位置まで上昇し、対象物9に作用する残留吸着力が解消されると、離脱機構が最終的な離脱動作を行う。即ち、ピン駆動部153が動作して、各昇降ピン151を所定の上限位置まで上昇させる。この結果、対象物9も上限位置まで上昇する。この位置で、人の手によって又はロボット等の自動的な機構によって対象物9は静電吸着ステージから取り去られる。
【0040】
上記動作の説明から解るように、本実施形態の静電吸着ステージによれば、静電吸着面10に残留吸着力が無いか又はあっても影響を受けない状態で対象物9が静電吸着面10から脱離するので、対象物9の跳びはね、破損、位置ずれ、剥離帯電等の問題が生じない。また、対象物9に機械的な予圧をかけた状態で逆電界を設定して残留電荷を緩和するので、残留電荷がゼロになる直前に予圧によって対象物9が静電吸着面10から自動的に離間する。従って、誘電体ブロック12が逆極性に誘電分極され始めても、対象物9にはこの逆極性の誘電分極による残留吸着力は作用しない。このため、残留電荷が丁度ゼロになるタイミングで逆電界設定を停止させる必要はなく、本実施形態の構成の実用性は極めて高い。即ち、誘電体ブロック12の体積抵抗等の静電的な条件に応じて逆電界の印加時間を調節する必要はない。図4に示すように、時刻t4経過後に、任意の時刻t5に一対の吸着電源141,142の動作を停止させればよい。時刻t4は、誘電体ブロック12の体積抵抗等の条件により異なるから、予想される(t4−t0)の時間のうち最も長い時間に対して充分長くなるように時刻t5を設定すればよい。
【0041】
上述した本実施形態の構成において、予圧機構が与える予圧の大きさは重要なパラメータである。予圧を印加する際、その印加の瞬間における残留吸着力よりも大きな予圧を印加してしまうと、予圧の印加と同時に対象物9が残留吸着力に逆らって静電吸着面10から離間する結果となる。これでは、対象物9を無理矢理脱離させているのと同じになり、前述したように対象物9の跳びはね、破損、位置ずれ、剥離帯電等の問題を生ずる恐れがある。
【0042】
また、対象物9の自重がコイルスプリング181を圧縮する圧力よりも予圧が小さくなってしまうと、残留吸着力がゼロになった時点で対象物9が静電吸着面10から離間しない事態となってしまう。これでは、逆極性の誘電分極による静電吸着力が引き続き作用する結果となり、残留吸着力の無い状態で対象物9を脱離させることが不可能になってしまう。従って、本実施形態の構成では、予圧は対象物9の自重による圧力より大きくすることが好ましい。
【0043】
本実施形態では、静電吸着面10が水平に沿った面であり、その上に対象物9が静電吸着されたが、静電吸着面10が垂直な面であり、対象物9が垂直に立った状態で静電吸着される場合もある。また、水平な静電吸着面10が静電吸着ステージの下面に相当しており、下側で対象物9を静電吸着する場合もある。このように静電吸着面10が側面や下面に設定されている場合、対象物9の自重の影響は無いので、対象物9の自重よりも小さな予圧でも構わない場合がある。尚、このように静電吸着面10が側面や下面に設定されている場合、静電吸着面10から離間した対象物9が落下しないよう保持する保持具を別途設けることが好ましい。
【0044】
尚、予圧によって対象物9が静電吸着面10から離間した際の静電吸着面10と対象物9との距離(以下、離間距離)は、前述したように、クーロン力が実質的に無視できる程度とされる。この距離は、0.1mm程度以上である。離間距離を長くすることはクーロン力の影響を小さくすることから好ましいが、あまり長くすると、コイルスプリング181の弾性を強くすることになり、離間の際に対象物9が大きく飛び跳ねてしまう問題が生ずる。このため、離間距離は1.0mm程度以下にすることが好ましい。
【0045】
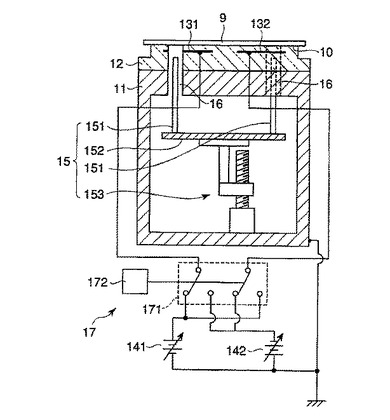
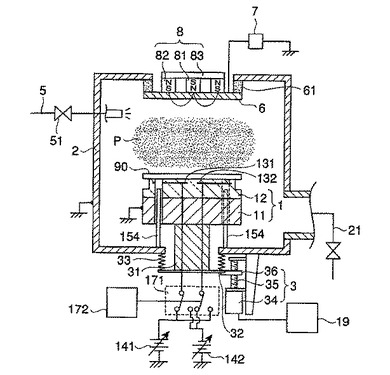
次に、基板処理装置の発明の実施形態について説明する。基板処理装置の実施形態は、上述した実施形態とほぼ同じ構成の静電吸着ステージを備え、対象物としての基板を静電吸着ステージに静電吸着して保持しながら基板の表面に所定の処理を施す装置である。このような基板処理装置としては各種のものがあるが、以下の説明では、一例としてスパッタリング装置を採り上げる。図6は、基板処理装置の発明の実施形態であるスパッタリング装置を示した正面断面概略図である。図6に示す装置は、内部で基板90に対してスパッタリング処理が行われる処理容器2と、処理容器2内の所定位置に基板90を静電吸着して保持する静電吸着ステージ1とを備えている。
【0046】
処理容器2は、排気系21を備えた気密な真空容器である。排気系21は、処理容器2内を10-9Torr程度の到達圧力まで排気できるよう構成される。処理容器2は、不図示のゲートバルブを介して不図示の予備真空容器に気密に接続されている。
【0047】
静電吸着ステージ1は、図1〜図3に示す実施形態と同様に、ステージ本体11と誘電体ブロック12とから成る。そして、誘電体ブロック12内に一対の吸着電極131,132が埋設されており、この一対の吸着電極131,132に極性が互いに異なる直流電圧を印加する一対の吸着電源141,142が設けられている。本実施形態においても、静電吸着ステージ1は、逆電界設定機構17を備えている。逆電界設定機構17は、図1〜図3に示す実施形態と同様に、スイッチ回路171と、スイッチ回路171を駆動するスイッチ駆動部172とから成る構成である。
【0048】
また、静電吸着ステージ1は、同様に脱離機構15及び予圧機構を備えている。これらの構成は、図1〜図3に示すものとは多少異なる。脱離機構15は、静電吸着ステージ1内に設けられた複数の支持ピン154と、静電吸着ステージ1全体を上下に駆動して昇降させるステージ駆動部3とから主に構成されている。本実施形態における支持ピン154では、図1から図3に示す実施形態における昇降ピン151と同様に、正三角形の頂点の位置に三つ設けられている。そして、図1から図3に示す実施形態における昇降ピン151と同様に、コイルスプリングと可動ヘッド(ともに図6中不図示)が設けられている。
【0049】
また、図6に示すように、静電吸着ステージ1の下面中央にはステージ支柱31の上端が固定されている。ステージ支柱31の下端は、水平なベース板32に固定されている。処理容器2の底板部には、静電吸着ステージ1の断面よりも少し小さい開口が設けられている。ステージ支柱31はこの開口に層通されている。そして、ベース板32は処理容器2の下方に位置し、ベース板32の周縁と処理容器2の開口の縁と気密につなぐようにしてベローズ33が設けられている。ステージ駆動部3は、サーボモータ34と、サーボモータ34に接続されたボールねじ35と、ベース板32に固定されているとともにボールねじ35に噛み合った状態で設けられた接続ポート36とから主に構成されている。サーボモータ34が駆動されると、ボールねじ35の回転により接続ポート36を介してベース板32が昇降する。この結果、静電吸着ステージ1もベース板32と一体に昇降するようになっている。
【0050】
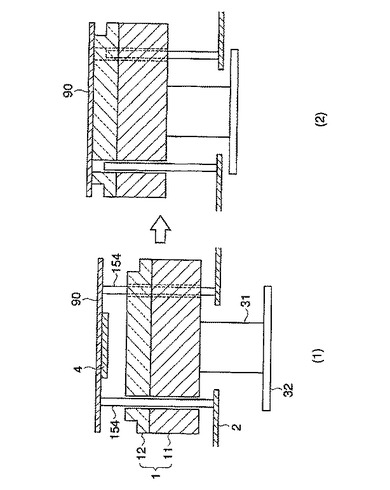
脱離機構15の動作について、図7を使用して説明する。図7は、図6に示す装置における静電吸着ステージ1の脱離機構15の動作について説明する図である。本実施形態の装置では、基板90は、不図示の搬送ロボットにより処理容器2内に搬送され、処理終了後には、不図示の搬送ロボットにより処理容器2から搬出されるようになっている。上述した静電吸着ステージ1の脱離機構15は、搬送ロボットから静電吸着ステージ1への、また、静電吸着ステージ1から搬送ロボットへの基板90の受け渡しのための機構にも兼用されている。
【0051】
基板90が処理容器2内に搬入されていない状態では、ステージ駆動部3は、静電吸着ステージ1を所定の下限位置に位置させている。この状態では、支持ピン154の先端は静電吸着ステージ1の上面(静電吸着面10)から突出している。この状態で、図7(1)に示すように、搬送ロボットがアーム4によって基板90を支持しながら不図示のゲートバルブを通って処理容器2内に進入した後に下降し、基板90を支持ピン154の上に載せる。搬送ロボットがアーム4を少し下降させた後に後退させ、処理容器2内から退出させる。不図示のゲートバルブが閉じるとともに、ステージ駆動部3が動作し、図7(2)に示すように、静電吸着ステージ1を所定の上限位置まで上昇させる。この結果、静電吸着ステージ1の静電吸着面10の上に基板90が載る。支持ピン154の先端は、基板90の裏面から離れた状態となる。この状態で、吸着電源141,142が動作し、前述した実施形態の場合と同様に基板90が静電吸着される。
【0052】
次に、処理終了後に基板90を処理容器2から搬出する場合には、ステージ駆動部3は静電吸着ステージ1を上限位置から下限位置まで下降させる。この結果、基板90が静電吸着ステージ1の静電吸着面10から脱離し、図7(1)に示すのと同様に支持ピン154の上に基板90が載った状態となる。この状態でゲートバルブが開いて搬送ロボットのアーム4が処理容器2内に進入して基板90の下方に位置する。そして、アーム4が所定距離上昇して基板90を受け取り、処理容器2から退出する。
【0053】
本実施形態における予圧機構は、上述した各支持ピン154内のコイルスプリングと、ステージ駆動部3のサーボモータ34を制御する制御部19等から構成されている。制御部19は、上記基板90の脱離動作の際、上限位置から下限位置に一気に下降させるのではなく、各支持ピン154内のコイルスプリングにより基板90に予圧が与えられる位置に静電吸着ステージ1を一時的に停止させるようになっている。本実施形態の説明では、この位置を「予圧位置」と呼ぶ。この予圧機構の動作について、図8を使用して以下具体的に説明する。図8は、図6に示す基板処理装置の実施形態における予圧機構の動作について説明する図である。
【0054】
前述した脱離動作の際、ステージ駆動部3は、前述したように静電吸着ステージ1を上限位置から下降させる。静電吸着ステージ1が下降すると、基板90の裏面と各支持ピン154の上端との距離が徐々に小さくなり、やがて、各支持ピン154内のコイルスプリング155の上端に設けられた可動ヘッド156に基板90の裏面が接触する(図8(1))。
【0055】
ステージ駆動部3は、静電吸着ステージ1を図8(1)に示す状態からさらに短い所定の距離だけ下降させる(図8(2))。この下降により、基板90の裏面は可動ヘッド156を下方に押し下げるため、コイルスプリング155の弾性により基板90を上方に押し上げる力が基板90に対して与えられる。この際に基板90に与えられる力は、基板90に作用している残留吸着力よりも大きさが小さく静電吸着力とは逆向きの力であり、本実施形態における予圧である。予圧の大きさは、図8(1)の状態から図8(2)の状態にする際の静電吸着ステージ1の下降距離D及びコイルスプリング155のバネ定数によって決まるが、予圧が残留吸着力より大きくならないよう、これらのパラメータが選定される。
【0056】
本実施形態においても、上述した予圧の印加により、誘電体ブロック12の体積抵抗等を考慮することなく、残留電荷がほぼゼロになるタイミングで確実に基板90の脱離を行うことができる。この点について、図9を使用して説明する。図9は、図6から図8に示す実施形態の装置における静電吸着ステージ1からの基板90の脱離動作について説明するタイミングチャートである。図9中、(1)は吸着電極131への印加電圧を、(2)は吸着電極132への印加電圧を、(3)は静電吸着ステージ1の位置を、(4)は予圧の印加状況を、(5)は誘電体ブロック12の残留電荷を、(6)は基板90に作用する静電吸着力についてそれぞれ時系列的に示している。
【0057】
処理終了後、基板90を静電吸着ステージ1から脱離させるために、時刻t0において、一対の吸着電源141,142の動作を停止させる。この結果、一対の吸着電極131,132への印加電圧は0Vになるものの、誘電体ブロック12の残留電荷により基板90は静電吸着面10に吸着されている。そして、時刻t1においてステージ駆動部3が動作し、静電吸着ステージ1を上限位置から予圧位置に下降させる。この結果、前述した予圧が対象物9に与えられた状態となる。
【0058】
その後、スイッチ駆動部172がスイッチ回路171を駆動させ、一対の吸着電極131,132に対する一対の吸着電源141,142の接続状態を互いに逆にし、時刻t2において一対の吸着電源141,142が動作を再開する。この結果、一対の吸着電極131,132を介して誘電体ブロック12に逆電界が設定される。これによって、誘電体ブロック12の残留電荷は、図9(5)に示すように急速に緩和されて減少する。
【0059】
そして、逆電界の印加が続き、時刻t4において残留電荷がやがてゼロになり、時刻t4を過ぎると、誘電体ブロック12が逆極性に充電されて図9(5)に示すように逆極性の電荷が生ずるようになる。この際、時刻t4より僅かに前のt3において、残留吸着力と予圧とが等しくなり、この時刻t3又はこの時刻t3を過ぎたとたんに、支持ピン154内のコイルスプリング181の弾性により対象物9が少し持ち上がって静電吸着面10から離間する。この結果、ジョンソンラーベク力の解消により静電吸着力は激減する。そして、基板90は、コイルスプリング155の弾性と基板90の自重とが釣り合う高さまで持ち上がり、この状態では残留電荷によるクーロン力は無視できるほど小さい。その後、ステージ駆動部3が静電吸着ステージ1をさらに下降させ、当初の下限位置に位置させる。これによって、基板90の脱離動作が完了する。
【0060】
上記説明から解るように、本実施形態においても、静電吸着面10に残留吸着力が無いか又はあっても影響を受けない状態で基板90が静電吸着面10から脱離するので、基板90の跳びはね、破損、位置ずれ、剥離帯電等の問題が生じない。また、予圧機構によって予圧が与えられているため、残留電荷がゼロになる直前で基板90が静電吸着面10から自動的に離間して静電吸着力が解消される。従って、誘電体ブロック12の体積抵抗等の条件を考慮する必要はなく、極めて実用性が高い。
【0061】
次に、本実施形態の装置の他の構成について説明する。本実施形態の装置は、上述した他、図6に示すように、処理容器2内に所定のプロセスガスを導入するガス導入系5と、処理容器2内に被スパッタ面が露出するよう設けられたターゲット6と、ターゲット6に所定の電圧を印加してスパッタ放電を生じさせるスパッタ電源7と、ターゲット6の背後に設けられた磁石機構8とを備えている。
【0062】
ターゲット6は、絶縁材61を介してスパッタチャンバー1に気密に取り付けられている。ターゲット6の材質は、基板90の表面に作成する薄膜の材質により決まる。スパッタ電源7には、負の直流電源又は高周波電源が使用される。高周波電源が使用される場合、ターゲット6とスパッタ電源7との間に所定のキャパシタンスが設けられ、ターゲット6に自己バイアス電圧を与えてターゲット6をスパッタする。
【0063】
磁石機構8は、放電の効率のよいマグネトロンスパッタを行うために備えられている。具体的には、磁石機構8は、中心磁石81と、中心磁石81を周状に取り囲む周辺磁石82と、中心磁石81及び周辺磁石82を繋ぐ円盤状のヨーク83とから構成されている。
【0064】
ガス導入系5は、所定のプロセスガスを溜めた不図示ボンベと処理容器2とをつなぐ配管に設けられたバルブ51や不図示の流量調整器とから主に構成されている。プロセスガスとしては、アルゴンや窒素等のガスが使用される。
【0065】
本実施形態の装置の全体の動作について、以下に説明する。排気系21によって処理容器2が不図示の予備真空容器と同程度の真空圧力まで排気されている状態で、不図示のゲートバルブを通して基板90を不図示の搬送ロボットにより不図示の予備真空容器から処理容器2内に搬入し、静電吸着ステージ1に載置して静電吸着させる。そして、ゲートバルブを閉じた後、ガス導入系5によって所定のプロセスガスを所定の流量で処理容器2内に導入し、この状態でスパッタ電源7を動作させる。この結果、スパッタ放電が生じてプラズマPが形成される。スパッタ放電によりターゲット6がスパッタされ、基板90の表面に所定の薄膜が作成される。
【0066】
薄膜が所定の厚さに達するまでスパッタを続けた後、スパッタ電源7及びガス導入系5の動作を止める。その後、排気系21によって処理容器2内を再度排気した後、前述したように基板90を静電吸着ステージ1から脱離させ、不図示の搬送ロボットにより処理容器2から不図示の予備真空容器に搬出する。これで一枚の基板90に対する一連の処理が終了する。このような動作を繰り返して、成膜処理を各基板90に対して行う。
【0067】
上述したように、本実施形態の装置は、図1から図3に示す静電吸着ステージ1とは多少異なる構成のものを使用したが、全く同じ構成の静電吸着ステージ1を使用することも勿論可能である。また、本実施形態では、基板処理装置の一例としてスパッタリング装置を採り上げたが、CVD装置やエッチング装置等の他の基板処理装置についても同様に実施できることはいうまでもない。
【0068】
尚、上述したような処理容器2内にプラズマを形成して処理する装置では、プラズマと高周波との相互作用により生ずる自己バイアス電圧により静電吸着を行う構成も採用し得る。この場合には、一対の吸着電極131,132に同様に高周波電圧を印加するか、又は、吸着電極131,132を一つにしてこれに高周波電圧を印加するようにする。プラズマ中のイオン及び電子は高周波によって周期的に静電吸着ステージ1に引きつけられるが、イオンと電子の移動度の違いから電子が多く引きつけられ、その違いを相殺するようにして静電吸着ステージ1の表面は高周波電圧に負の直流分の電圧を重畳したような電位変化となる。この負の直流分の電圧が自己バイアス電圧である。この自己バイアス電圧のみによっても基板90の静電吸着は可能であるが、さらに吸着電極131,132に正の直流電圧を重畳させると、より強い誘電分極を生じるため静電吸着力が高くなる。
【0069】
また、本実施形態では、基板90としては半導体ウェーハが想定されているが、液晶ディスプレイを製作する際の液晶基板やプリント回路を製作する際のプリント基板等についても同様に実施できる。
【実施例】
【0070】
次に、上記基板処理装置の実施形態の実施例について説明する。基板90が直径200mm程度のシリコン半導体ウェーハの場合、静電吸着ステージ1への静電吸着は、一対の吸着電源141,142によって一対の吸着電極131,132に±300V程度の電圧を印加することにより行える。
【0071】
このように静電吸着した基板90を静電吸着ステージ1から脱離させる場合、一対の吸着電源141,142の出力をゼロにした後、1〜3秒程度この状態を保持する。そして、前述した予圧機構により10gf/cm2程度の予圧を基板90に印加する。そして、スイッチ回路171を動作させて極性を切り替え、±500V程度の電圧を印加して誘電体ブロック12に逆電界を設定する。この状態を5秒程度維持した後、脱離機構15を最終的に動作させ、基板90を静電吸着ステージ1から脱離する。この脱離動作までには、残留電荷がゼロになるタイミングで基板90は静電吸着面10から自動的に離間しており、基板90の跳びはね、破損、位置ずれ、剥離帯電等は生じない。
【0072】
残留電荷がゼロになるタイミングは、前述したように、基板90の種類や表面の構成、誘電体ブロック12の体積抵抗のバラツキ等により変化するが、上記条件による場合、予圧印加状態で逆電界を設定する時間を5秒程度に設定すれば、殆どすべての場合において自動的に基板90が静電吸着面10から離間する。尚、与えるべき予圧の大きさは、前述した通り脱離の際の残留吸着力によって変わる。そして、残留吸着力は基板90を静電吸着する際の電圧によって変わる。上述したような基板処理装置の場合、静電吸着用の電圧は500V〜1000V程度である。この場合、予圧の大きさは10gf/cm2〜30gf/cm2程度であることが好ましい。10gf/cm2より小さいと、基板90が静電吸着面10からうまく離間しない恐れがある。また、30gf/cm2より大きいと、離間の際に基板90の跳びはねが生ずる恐れがある。
【0073】
上述した各実施形態及び実施例において、吸着電極131,132は一対のものであったが、二対、三対、又はそれ以上であってもよい。また、誘電体ブロック12外の電極との間で電界を設定する構成であれば、吸着電極は一つであってもよい。脱離機構15の構成としては、前述したような昇降ピン151又は支持ピン154を使用するものの他、複数のフック状の部材を対象物9の周縁部分に引っ掛けて対象物9を脱離させる構成でもよい。さらに、脱離機構15が予圧機構に兼用されていない構成も考えられる。例えば、脱離機構15とは別に前述したような昇降ピンを設けて予圧機構としてもよい。また、複数のフック状の部材を対象物9の周縁部分に引っ掛けて対象物9を静電吸着面10から引き離す力を予圧として与える構成でもよい。
【0074】
本願の発明における予圧は、静電吸着力とは逆向きの力であるが、完全に逆向きの力でなくともよい。静電吸着面から対象物9又は基板90を離間させる方向の力であればよく、静電吸着面に対して斜めに作用する力の場合もある。尚、本願における静電吸着ステージの発明は、前述したような基板処理装置の他、基板の表面を検査する装置等に使用することが可能である。
【符号の説明】
【0075】
1 静電吸着ステージ
11 ステージ本体
12 誘電体ブロック
131 吸着電極
132 吸着電極
141 吸着電源
142 吸着電源
15 脱離機構
151 昇降ピン
152 ピン保持板
153 ピン駆動部
154 支持ピン
155 コイルスプリング
156 可動ヘッド
17 逆電界設定機構
171 スイッチ回路
172 スイッチ駆動部
181 コイルスプリング
182 可動ヘッド
2 処理容器
3 ステージ駆動部
4 アーム
5 ガス導入系
6 ターゲット
7 スパッタ電源
8 磁石機構
9 対象物
90 基板
【技術分野】
【0001】
本願の発明は、板状の対象物を静電吸着する静電吸着ステージに関するものであり、また、このような静電吸着ステージによって対象物としての基板を保持して基板の表面に所定の処理を施す基板処理装置に関するものである。
【背景技術】
【0002】
対象物を静電気により吸着する静電吸着の技術は、半導体ウェーハや液晶基板等の基板(製品の基になる板状物の総称)を処理する装置において多用されている。例えば、基板の表面に所定の薄膜を作成するスパッタリング装置やプラズマ化学蒸着(CVD)装置、プラズマの作用を利用して基板の表面を所定のパターンでエッチングするプラズマエッチング装置等の基板処理装置では、基板を静電吸着ステージに静電吸着して処理を行っている。
【0003】
静電吸着ステージは、表面が対象物を静電吸着する面になっている誘電体ブロックと、誘電体ブロック内に埋設された吸着電極と、吸着電極に静電吸着用の電圧を印加する吸着電源とから主に構成されている。通常、一対又は複数対の吸着電極が設けられており、吸着電源は、対を成す吸着電極に対して直流電圧を与える。この結果、誘電体ブロックの表面に静電気が誘起され、対象物が静電吸着される。
【0004】
上述したような基板処理装置は、真空中で又は所定の雰囲気中で基板を処理するため、多くの場合、気密な処理容器内に上記静電吸着ステージを備えている。そして、搬送ロボットによって処理容器内に基板を搬送し、静電吸着ステージに載置して静電吸着している。そして、処理終了後は、基板を静電吸着ステージから受け取って処理容器から搬出するようにしている。
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記従来の静電吸着ステージにおいて、対象物を静電吸着ステージから取り去る際には、吸着電源の動作を停止させ、吸着電極への電圧印加を解消した状態とする。しかしながら、電圧印加解消後も誘電体ブロックの電荷はすぐには解消せず、静電吸着面には多くの電荷が残留している。このため、対象物を静電吸着面から脱離させようとしても、残留電荷による静電吸着力(以下、残留吸着力)のために対象物が脱離しないことがある。また、無理矢理対象物を脱離させようとすると、対象物が跳びはねたり、最悪の場合には対象物が破損してしまうことがある。
【0006】
また、静電吸着面に残留電荷がある状態で対象物を脱離させると、剥離帯電と同じメカニズムで対象物の裏面が帯電してしまう問題がある。対象物が製品の基になる基板である場合、裏面が帯電すると、そこに多くの塵埃が吸い寄せられ、吸い寄せられた塵埃が基板の表面側に周り込む結果、基板の表面を汚損する恐れがある。このような基板の汚損は、製品不良の原因となる場合がある。
【0007】
さらに、対象物としての基板を搬送ロボットで自動搬送する基板処理装置等において、残留吸着力より静電吸着されている基板を無理矢理脱離させようとすると、反動で基板の位置ずれが生じる。この結果、搬送ロボットに基板を受け渡すことができなくなる事故が発生する恐れもある。
【0008】
このような問題を避ける方法として、吸着電極への電圧印加解消後、残留電荷が自然消滅する時間をおいてから対象物を脱離させる方法が考えられる。しかしながら、自然消滅するまでには30秒〜60秒程度の時間を要し、脱離終了までに長時間を要する欠点がある。特に、静電吸着ステージが基板処理装置のような生産設備に使用される場合、スループットの悪化等の生産性低下の原因になる。
【0009】
また、別の方法として、一対の吸着電極に対して静電吸着の際とは互いに逆極性の電圧を印加して残留電荷を早急に解消させる方法も考えられる。即ち、一対の吸着電極のうち、静電吸着の際には、一方の吸着電極に正電圧を、他方の吸着電極には負電圧を印加する。そして、脱離の際には、一方の吸着電極に負電圧を、他方の吸着電極には正電圧を印加する。誘電ブロックには逆電界が設定されるため、残留電荷が短時間に解消するメリットがある。
【0010】
しかしながら、上記方法も、次のような欠点がある。まず、脱離の際に逆電界を設定した場合、逆電界設定によって残留電荷は減少し、あるタイミングでゼロになるものの、それ以上に逆電界設定を続けると、今度は逆方向に誘電体ブロックが充電されてしまい、静電吸着面には逆極性の電荷が発生してしまう。従って、この方法を実現するには、残留電荷が丁度ゼロになるタイミングで逆電界設定を停止させる必要がある。しかしながら、この残留電荷がゼロになっている時間の幅は非常に短く、このタイミングで精度良く逆電界設定を停止させるのは困難である。
【0011】
また、上記方法を実現するには、残留電荷がゼロになるまでの時間を予め実験的に求めておき、そのタイミングで逆電界設定を停止させるシーケンスを採用することになる。しかしながら、残留電荷がゼロになるまでの時間は色々な要因によって変化するため、残留電荷ゼロの状態で逆電界設定を停止させるのは実際には難しい。例えば、残留電荷がゼロになるまでの時間は、誘電体ブロックの体積抵抗に大きく影響されるが、この体積抵抗は温度により変化する。基板処理装置における静電吸着ステージは、処理中に基板が所定の温度になるように加熱又は冷却されて温度制御されていることが多く、その温度は処理の種類によって異なる。従って、残留電荷がゼロになるまでの時間も処理の種類によって異なることになる。残留電荷がゼロになるまでの時間を、処理の種類に応じた静電吸着ステージの各温度に従って予め求めておくことは困難かつ面倒である。
【0012】
また、誘電体ブロックの体積抵抗は、その製造上の理由からばらつくことが避けられない。従って、残留電荷がゼロになるまでの時間は、使用する静電吸着ステージにより少しずつ変化してしまう。また、基板処理装置では、残留電荷がゼロになるまでの時間は、基板の表面状態によっても変わってしまう。例えば、基板が単なるシリコンウェーハ(ベアシリコン)の場合と、シリコンウェーハの表面に酸化シリコン等の絶縁膜が形成されている場合とでは、残留電荷がゼロになるまでの時間は微妙に変わってしまう。
【0013】
さらに、対象物としての基板を搬送ロボットにより自動搬送する基板処理装置等では、静電吸着ステージと搬送ロボットとの間の基板の受け渡しは、静電吸着ステージに設けた複数の昇降ピンにより行われることが多い。この場合、基板への昇降ピンの当接箇所は複数になるが、上記方法において残留電荷が消滅するタイミングはそれら複数の当接箇所において同時になることは殆どない。従って、ある箇所で残留電荷がゼロになったタイミングを捉えて基板を脱離させても、他の箇所ではまだ残留電荷があり、その箇所では昇降ピンが無理矢理基板を脱離させることになる。この結果、基板の跳びはね、破損、剥離帯電、位置ずれ等が生ずる恐れがある。
【0014】
本願の発明は、このような課題を解決するためになされたものであり、対象物を静電吸着ステージから脱離させる際に対象物の跳びはね、破損、剥離帯電、位置ずれ等の問題を発生させないという技術的意義を有する。
【課題を解決するための手段】
【0015】
本発明は、処理容器と、
前記処理容器内にプロセスガスを導入するためのガス導入手段と、
前記処理容器内に被スパッタ面が露出するように設けられたターゲットと、
誘電体ブロックと該誘電体ブロック内に設けられた吸着電極と有し、基板を保持するための静電吸着ステージと、
該誘電体ブロックに静電吸着用の電界とは逆向きの電界を設定するための逆電界設定機構と、
静電吸着面から基板を離間させるために機械的な圧力を対象物に与えるための予圧機構と、
を具備し、
前記吸着電極への印加電圧を停止にした後、
前記予圧機構を作動して基板に機械的圧力を印加し、その後、前記逆電界設定機構により、該静電吸着用の電界とは逆向きの電界を前記静電吸着ブロックに与えるように構成されていることを特徴とするスパッタリング装置である。
【発明の効果】
【0016】
本発明に係る静電吸着ステージによれば、静電吸着面に残留吸着力が無いか又はあっても影響を受けない状態で対象物が静電吸着面から脱離するので、対象物の跳びはね、破損、位置ずれ、剥離帯電等の問題が生じない。また、対象物に機械的な予圧をかけた状態で逆電界を設定して残留電荷を緩和するので、残留電荷がゼロになる直前に予圧によって対象物が静電吸着面から自動的に離間する。従って、誘電体ブロックが逆極性に誘電分極され始めても、対象物にはこの逆極性の誘電分極による残留吸着力は作用しない。このため、残留電荷が丁度ゼロになるタイミングで逆電界設定を停止させる必要はなく、極めて実用性の高い静電吸着ステージが提供される。また、予圧を対象物の自重による圧力より大きくすることで、上記効果に加え、残留電荷がゼロになった場合でも対象物の自重により対象物が静電吸着面から離間しないという問題は生じない。また、対象物と静電吸着面との離間距離を0.1mm〜1.0mmとすることにより、上記効果に加え、対象物がクーロン力等により静電吸着面から離間しないという問題や、対象物が急激に離間して跳びはねるといった問題は生じない。また、本発明によれば、基板処理装置において上記発明の効果と同様の効果を得ることができ、基板の跳びはね、破損による歩留まりの低下、位置ずれによる基板搬送エラーの事故、剥離帯電による基板の汚損等の問題が生じない実用的な装置が提供される。
【図面の簡単な説明】
【0017】
【図1】静電吸着ステージの発明の実施形態の概略を示す正面断面図である。
【図2】静電吸着ステージの発明の実施形態の概略を示す平面図である。
【図3】図1の静電吸着ステージに設けられた予圧機構について説明する図であり、図1に示す昇降ピン151の断面構造を示す概略図である。
【図4】図1から図3に示す実施形態の静電吸着ステージの動作について説明するタイミングチャートである。
【図5】対象物9の脱離の際の予圧機構の動作について説明する図である。
【図6】基板処理装置の発明の実施形態であるスパッタリング装置を示した正面断面概略図である。
【図7】図7は、図6に示す装置における静電吸着ステージ1の脱離機構15の動作について説明する図である。
【図8】図6に示す基板処理装置の実施形態における予圧機構の動作について説明する図である。
【図9】図6から図8に示す実施形態の装置における静電吸着ステージ1からの基板90の脱離動作について説明するタイミングチャートである。
【発明を実施するための形態】
【0018】
以下、本願発明の実施の形態について説明する。まず、静電吸着ステージの発明の実施形態について説明する。図1及び図2は静電吸着ステージの発明の実施形態の概略を示す図であり、図1は正面断面図、図2は平面図である。図1及び図2に示す静電吸着ステージは、金属製のステージ本体11と、表面が静電吸着面10である誘電体ブロック12と、誘電体ブロック12内に設けられた吸着電極131,132とから主に構成されている。
【0019】
誘電体ブロック12は、アルミナ等の誘電体製である。本実施形態では、二極方式の構成が採用されており、従って吸着電極131,132は一対のものである。一対の吸着電極131,132は図2に示すように半円板状であり、静電吸着面10と平行な面に沿って設けられている。
【0020】
また、静電吸着ステージは、吸着電極131,132に所定の電圧を印加して誘電体ブロック12に静電吸着用の電界を設定する吸着電源141,142を備えている。吸着電源141,142は二つ設けられており、一対の吸着電極131,132に極性が互いに異なり大きさが同じである直流電圧を印加するようになっている。尚、ステージ本体11はアースされている。二つの吸着電源141,142が動作すると、一対の吸着電極131,132の間には静電吸着用の電界として直流電界が設定され、この電界によって静電吸着面10に静電気が誘起されて対象物9が静電吸着されるようになっている。
【0021】
静電吸着のメカニズムとしては、二つのものが知られている。一つは、クーロン力によるものであり、もう一つはジョンソンラーベク力によるものである。ジョンソンラーベク力は、微小な領域に電流が集中することにより生ずる吸着力である。即ち、静電吸着面10や対象物9の裏面は、微視的には小さな凹凸があり、対象物9が静電吸着面10に載置された際には、これらの凹凸が接触している。吸着電源141,142が動作して静電吸着面10に静電気が誘起されると、これらの微小な凹凸の接触箇所に電流が集中して流れ、この結果、ジョンソンラーベク力による吸着力が生ずる。本実施形態のような静電吸着ステージは、クーロン力よりもジョンソンラーベク力の方が支配的であり、主にジョンソンラーベク力により静電吸着が成される。
【0022】
また、静電吸着ステージは、対象物9を静電吸着面10から脱離させる脱離機構15を備えている。脱離機構15は、主に静電吸着ステージ内で昇降する複数の昇降ピン151と、複数の昇降ピン151を一体に保持したピン保持板152と、ピン保持板152を駆動して複数の昇降ピン151を一体に昇降させるピン駆動部153等から構成されている。図1及び図2に示すように、静電吸着ステージには、上下方向に長いピン用通路16が形成されている。昇降ピン151はこのピン用通路16内に位置して昇降するようになっている。尚、図2に示すように、ピン用通路16は三つ設けられており、それらの位置は静電吸着ステージの中心と同心である正三角形の頂点の位置となっている。そして、それらピン用通路16の各々に昇降ピン151が設けられており、従って三つの昇降ピン151が設けられている。
【0023】
ピン保持板152は、水平な姿勢で設けられており、各昇降ピン151の下端を固定して保持している。ピン駆動部153には、サーボモータとボールねじを組み合わせた機構が採用されている。サーボモータを動作させると、ピン保持板152は不図示の回転規制部によって回転しないようになっているので、ボールねじによって回転運動が上下運動に変換されてピン保持板152が上下に移動する。この結果、各昇降ピン151が同時に昇降するようになっている。サーボモータとしては位置制御用の高精度のものが好適であり、昇降ピン151を上下方向の任意の位置で停止させられるようにすることが好ましい。
【0024】
上述した構成の静電吸着ステージに対象物9を静電吸着させる場合、ピン駆動部153によって各昇降ピン151を所定の上限位置に位置させる。この上限位置では、各昇降ピン151は静電吸着面10から突出している。この状態で、各昇降ピン151の上に対象物9を載せ、ピン駆動部153を動作させて各昇降ピン151を下限位置まで下降させる。下限位置では、各昇降ピン151の先端は静電吸着面10よりも下方に位置する状態となる。従って、各昇降ピン151が上限位置から下降位置まで下降する際、対象物9は静電吸着面10の上に載る。この状態で、上述したように一対の吸着電源141,142を動作させると、対象物9は静電吸着面10に静電吸着される。
【0025】
対象物9を静電吸着面10から脱離させる際には、上記とは逆の動作になる。即ち、ピン駆動部153を動作させて各昇降ピン151を下限位置から上限位置まで上昇させる。この上昇の際、各昇降ピン151は対象物9を静電吸着面10から持ち上げるよう動作する。そして、各昇降ピン151が上限位置に達すると、対象物9も上限位置に位置することになる。これにより、対象物9の脱離動作が終了する。
【0026】
また、本実施形態の静電吸着ステージは、上記対象物9の脱離の際に残留電荷を少なくするため、逆電界設定機構17を備えている。逆電界設定機構17は、誘電体ブロック12に静電吸着用の電界とは逆向きの電界を設定するものである。本実施形態では、静電吸着用の電界を設定する一対の吸着電源141,142を逆電界設定機構17に兼用している。即ち、逆電界設定機構17は、一対の吸着電源141,142の吸着電極131,132に対する接続を逆にするスイッチ回路171と、スイッチ回路171を駆動するスイッチ駆動部172とから主に構成されている。
【0027】
スイッチ回路171は、OPアンプIC等の半導体素子を利用した回路又はリレー等が使用される。スイッチ駆動部172は、対象物9の静電吸着の際には、例えば、正電圧印加の吸着電源(以下、正電源)141を一方の吸着電極131に接続し、負電圧印加の吸着電源(以下、負電源)142を他方の吸着電極132に接続するようスイッチ回路171を駆動する。そして、対象物9の脱離の際には、正電源141を他方の吸着電極132に接続し、負電源142を一方の吸着電極131に接続するようスイッチ回路171を駆動する。これにより、誘電体ブロック12には静電吸着時とは逆向きの電界が設定されるようになっている。
【0028】
本実施形態の静電吸着ステージの大きな特徴点は、対象物9の脱離の際、所定の機械的な圧力を対象物9に与える予圧機構が設けられている点である。以下、この点を詳説する。予圧機構は、対象物9を静電吸着ステージから脱離させる際、静電吸着面10の残留電荷による残留吸着力よりも大きさが小さくて静電吸着力とは逆向きの機械的な圧力を脱離の前に予め対象物9に与えるものである。本実施形態では、構造を簡略化するため、脱離機構15を兼用して予圧機構としている。
【0029】
図3は、図1の静電吸着ステージに設けられた予圧機構について説明する図であり、図1に示す昇降ピン151の断面構造を示す概略図である。図3に示すように、昇降ピン151は上端側が中空状である。そして、この中空の部分には、コイルスプリング181と、コイルスプリング181の上端に固定された可動ヘッド182とが設けられている。コイルスプリング181の下端は、昇降ピン151の非中空部分に固定されている。図2に示すように本実施形態では三つの昇降ピン151が設けられているが、それぞれ同じ構成のコイルスプリング181及び可動ヘッド182が設けられている。
【0030】
コイルスプリング181が自由長の状態にあるとき、可動ヘッド182は昇降ピン151の上端開口から少し突出した状態になる。前述したように脱離機構15が動作して昇降ピン151が上昇すると、可動ヘッド182が対象物9の裏面に当接する。そしてさらに昇降ピン151が上昇すると、対象物9は残留吸着力によって静電吸着面10に吸着されているために可動ヘッド182がコイルスプリング181をその弾性に逆らって縮めるよう作用する。昇降ピン151が適当な上昇位置で停止すると、残留吸着力よりも大きさが小さくて残留吸着力とは逆向きの圧力がコイルスプリング181の弾性によって対象物9に与えられることになる。以下、この上昇位置を本実施形態の説明において「予圧位置」と呼ぶ。
【0031】
次に、上記構成に係る本実施形態の静電吸着ステージの動作について、図4を使用してさらに詳しく説明する。図4は、図1から図3に示す実施形態の静電吸着ステージの動作について説明するタイミングチャートである。図4中、(1)は吸着電極131への印加電圧を、(2)は吸着電極132への印加電圧を、(3)は可動ヘッド182の位置を、(4)は予圧の印加状況を、(5)は誘電体ブロック12の残留電荷を、(6)は対象物9に作用する静電吸着力についてそれぞれ時系列的に示している。
【0032】
まず、対象物9を静電吸着する場合には、前述した通り対象物9を静電吸着ステージの静電吸着面10の上に載せ、一対の吸着電源141,142を動作させる。これによって対象物9が静電吸着面10に静電吸着される。対象物9を静電吸着面10から脱離させる動作は、以下の手順で行う。まず、時刻t0にて、一対の吸着電源141,142の動作を停止させる。この結果、一対の吸着電極131,132への印加電圧は0Vということになる。この際、一対の吸着電極131,132は接地電位ではあるものの、誘電体ブロック12にはまだ残留電荷が多く存在しており、対象物9は残留吸着力によって静電吸着面10に吸着されている。
【0033】
そして、時刻t1において脱離機構15のピン駆動部153を動作させ、昇降ピン151が下限位置から予圧位置に位置するよう昇降ピン151を上昇させる。この結果、前述したように、対象物9が残留吸着力によって吸着されつつもそれとは逆向きの機械的な圧力が対象物9に与えられた状態となる。その後、スイッチ駆動部172がスイッチ回路171を駆動させ、一対の吸着電極131,132に対する一対の吸着電源141,142の接続状態を互いに逆にする。そして、時刻t2において一対の吸着電源141,142に動作を再開させる。この結果、一対の吸着電極131,132を介して誘電体ブロック12に静電吸着用の電界とは逆向きの電界が設定される。この逆向きの電界によって、誘電体ブロック12の残留電荷は、図4(5)に示すように急速に緩和されて減少する。
【0034】
逆電界の印加が続くと、時刻t4において残留電荷がやがてゼロになる。この時刻t4 を過ぎると、誘電体ブロック12が逆極性に充電されて図4(5)に示すように逆極性の電荷が生ずるようになる。しかしながら、本実施形態の静電吸着ステージにおいて重要な点は、対象物9に残留吸着力とは逆向きの予圧が与えられているので、残留電荷がゼロになった時点では予圧によって対象物9が静電吸着面10から離間し、逆極性の電荷によっては静電吸着されない点である。この点について、図4に加え図5を使用して説明する。図5は、対象物9の脱離の際の予圧機構の動作について説明する図である。
【0035】
図5(1)に示すように、対象物9に予圧が印加されている状態では、予圧機構のコイルスプリング181はその弾性に逆らって圧縮されている状態である。上述したように、誘電体ブロック12の残留電荷の減少に伴い、対象物9に作用する残留吸着力も急速に減少する。そして、時刻t4の前のt3においては、残留吸着力と予圧とが等しくなる。この時刻t3又はこの時刻t3を過ぎたとたんに、図5(2)に示すように、昇降ピン151内のコイルスプリング181の弾性により対象物9が少し持ち上がって静電吸着面10から離間する。
【0036】
対象物9が静電吸着面10から離間すると、誘電体ブロック12と対象物9との間に電流は流れなくなるので、ジョンソンラーベク力による静電吸着力はゼロになる。前述したように本実施形態のような静電吸着ステージではジョンソンラーベク力による静電吸着力が支配的であるから、対象物9が静電吸着面10から離間することにより、対象物9に作用する静電吸着力は激減する。このため、対象物9に作用する力は殆どコイルスプリング181の弾性のみになる。コイルスプリング181はその自由状態に近い長さになるまでに伸張し、対象物9はその分だけ上昇する。そして、対象物9の自重とコイルスプリング181の弾性と釣り合いが取れた位置(以下、離間位置)で対象物9の上昇が停止する。
【0037】
尚、対象物9が静電吸着面10から離間してもクーロン力による静電吸着力は対象物9に作用している。しかしながら、周知のようにクーロン力は距離の二乗に反比例して小さくなる。本実施形態においては、上記離間位置の静電吸着面10からの距離(図5中dで示す)が充分長くなるようコイルスプリング181の弾性力が設定されており、離間位置において対象物9に作用するクーロン力は無視できる程度に小さい。
【0038】
また、対象物9が静電吸着面10から離間するタイミングは、各昇降ピン151において同じになるとは限らない。これは、静電吸着面10の残留吸着力は完全に均一な度合いで減少するとは限らないからである。即ち、三つの昇降ピン151において、まず一つの昇降ピン151が当接している箇所で最初に離間が生じ、次に、別の一つの昇降ピン151が当接している箇所で離間が生じ、最後に、残りの一つの昇降ピン151が当接している箇所で離間が生ずる場合もある。いずれにしても、充分な時間の経過後には、三つの昇降ピン151の当接箇所すべてで離間が生じ、対象物9は静電吸着面10から完全に離間する。
【0039】
このようにして、対象物9が静電吸着面10から離間して離間位置まで上昇し、対象物9に作用する残留吸着力が解消されると、離脱機構が最終的な離脱動作を行う。即ち、ピン駆動部153が動作して、各昇降ピン151を所定の上限位置まで上昇させる。この結果、対象物9も上限位置まで上昇する。この位置で、人の手によって又はロボット等の自動的な機構によって対象物9は静電吸着ステージから取り去られる。
【0040】
上記動作の説明から解るように、本実施形態の静電吸着ステージによれば、静電吸着面10に残留吸着力が無いか又はあっても影響を受けない状態で対象物9が静電吸着面10から脱離するので、対象物9の跳びはね、破損、位置ずれ、剥離帯電等の問題が生じない。また、対象物9に機械的な予圧をかけた状態で逆電界を設定して残留電荷を緩和するので、残留電荷がゼロになる直前に予圧によって対象物9が静電吸着面10から自動的に離間する。従って、誘電体ブロック12が逆極性に誘電分極され始めても、対象物9にはこの逆極性の誘電分極による残留吸着力は作用しない。このため、残留電荷が丁度ゼロになるタイミングで逆電界設定を停止させる必要はなく、本実施形態の構成の実用性は極めて高い。即ち、誘電体ブロック12の体積抵抗等の静電的な条件に応じて逆電界の印加時間を調節する必要はない。図4に示すように、時刻t4経過後に、任意の時刻t5に一対の吸着電源141,142の動作を停止させればよい。時刻t4は、誘電体ブロック12の体積抵抗等の条件により異なるから、予想される(t4−t0)の時間のうち最も長い時間に対して充分長くなるように時刻t5を設定すればよい。
【0041】
上述した本実施形態の構成において、予圧機構が与える予圧の大きさは重要なパラメータである。予圧を印加する際、その印加の瞬間における残留吸着力よりも大きな予圧を印加してしまうと、予圧の印加と同時に対象物9が残留吸着力に逆らって静電吸着面10から離間する結果となる。これでは、対象物9を無理矢理脱離させているのと同じになり、前述したように対象物9の跳びはね、破損、位置ずれ、剥離帯電等の問題を生ずる恐れがある。
【0042】
また、対象物9の自重がコイルスプリング181を圧縮する圧力よりも予圧が小さくなってしまうと、残留吸着力がゼロになった時点で対象物9が静電吸着面10から離間しない事態となってしまう。これでは、逆極性の誘電分極による静電吸着力が引き続き作用する結果となり、残留吸着力の無い状態で対象物9を脱離させることが不可能になってしまう。従って、本実施形態の構成では、予圧は対象物9の自重による圧力より大きくすることが好ましい。
【0043】
本実施形態では、静電吸着面10が水平に沿った面であり、その上に対象物9が静電吸着されたが、静電吸着面10が垂直な面であり、対象物9が垂直に立った状態で静電吸着される場合もある。また、水平な静電吸着面10が静電吸着ステージの下面に相当しており、下側で対象物9を静電吸着する場合もある。このように静電吸着面10が側面や下面に設定されている場合、対象物9の自重の影響は無いので、対象物9の自重よりも小さな予圧でも構わない場合がある。尚、このように静電吸着面10が側面や下面に設定されている場合、静電吸着面10から離間した対象物9が落下しないよう保持する保持具を別途設けることが好ましい。
【0044】
尚、予圧によって対象物9が静電吸着面10から離間した際の静電吸着面10と対象物9との距離(以下、離間距離)は、前述したように、クーロン力が実質的に無視できる程度とされる。この距離は、0.1mm程度以上である。離間距離を長くすることはクーロン力の影響を小さくすることから好ましいが、あまり長くすると、コイルスプリング181の弾性を強くすることになり、離間の際に対象物9が大きく飛び跳ねてしまう問題が生ずる。このため、離間距離は1.0mm程度以下にすることが好ましい。
【0045】
次に、基板処理装置の発明の実施形態について説明する。基板処理装置の実施形態は、上述した実施形態とほぼ同じ構成の静電吸着ステージを備え、対象物としての基板を静電吸着ステージに静電吸着して保持しながら基板の表面に所定の処理を施す装置である。このような基板処理装置としては各種のものがあるが、以下の説明では、一例としてスパッタリング装置を採り上げる。図6は、基板処理装置の発明の実施形態であるスパッタリング装置を示した正面断面概略図である。図6に示す装置は、内部で基板90に対してスパッタリング処理が行われる処理容器2と、処理容器2内の所定位置に基板90を静電吸着して保持する静電吸着ステージ1とを備えている。
【0046】
処理容器2は、排気系21を備えた気密な真空容器である。排気系21は、処理容器2内を10-9Torr程度の到達圧力まで排気できるよう構成される。処理容器2は、不図示のゲートバルブを介して不図示の予備真空容器に気密に接続されている。
【0047】
静電吸着ステージ1は、図1〜図3に示す実施形態と同様に、ステージ本体11と誘電体ブロック12とから成る。そして、誘電体ブロック12内に一対の吸着電極131,132が埋設されており、この一対の吸着電極131,132に極性が互いに異なる直流電圧を印加する一対の吸着電源141,142が設けられている。本実施形態においても、静電吸着ステージ1は、逆電界設定機構17を備えている。逆電界設定機構17は、図1〜図3に示す実施形態と同様に、スイッチ回路171と、スイッチ回路171を駆動するスイッチ駆動部172とから成る構成である。
【0048】
また、静電吸着ステージ1は、同様に脱離機構15及び予圧機構を備えている。これらの構成は、図1〜図3に示すものとは多少異なる。脱離機構15は、静電吸着ステージ1内に設けられた複数の支持ピン154と、静電吸着ステージ1全体を上下に駆動して昇降させるステージ駆動部3とから主に構成されている。本実施形態における支持ピン154では、図1から図3に示す実施形態における昇降ピン151と同様に、正三角形の頂点の位置に三つ設けられている。そして、図1から図3に示す実施形態における昇降ピン151と同様に、コイルスプリングと可動ヘッド(ともに図6中不図示)が設けられている。
【0049】
また、図6に示すように、静電吸着ステージ1の下面中央にはステージ支柱31の上端が固定されている。ステージ支柱31の下端は、水平なベース板32に固定されている。処理容器2の底板部には、静電吸着ステージ1の断面よりも少し小さい開口が設けられている。ステージ支柱31はこの開口に層通されている。そして、ベース板32は処理容器2の下方に位置し、ベース板32の周縁と処理容器2の開口の縁と気密につなぐようにしてベローズ33が設けられている。ステージ駆動部3は、サーボモータ34と、サーボモータ34に接続されたボールねじ35と、ベース板32に固定されているとともにボールねじ35に噛み合った状態で設けられた接続ポート36とから主に構成されている。サーボモータ34が駆動されると、ボールねじ35の回転により接続ポート36を介してベース板32が昇降する。この結果、静電吸着ステージ1もベース板32と一体に昇降するようになっている。
【0050】
脱離機構15の動作について、図7を使用して説明する。図7は、図6に示す装置における静電吸着ステージ1の脱離機構15の動作について説明する図である。本実施形態の装置では、基板90は、不図示の搬送ロボットにより処理容器2内に搬送され、処理終了後には、不図示の搬送ロボットにより処理容器2から搬出されるようになっている。上述した静電吸着ステージ1の脱離機構15は、搬送ロボットから静電吸着ステージ1への、また、静電吸着ステージ1から搬送ロボットへの基板90の受け渡しのための機構にも兼用されている。
【0051】
基板90が処理容器2内に搬入されていない状態では、ステージ駆動部3は、静電吸着ステージ1を所定の下限位置に位置させている。この状態では、支持ピン154の先端は静電吸着ステージ1の上面(静電吸着面10)から突出している。この状態で、図7(1)に示すように、搬送ロボットがアーム4によって基板90を支持しながら不図示のゲートバルブを通って処理容器2内に進入した後に下降し、基板90を支持ピン154の上に載せる。搬送ロボットがアーム4を少し下降させた後に後退させ、処理容器2内から退出させる。不図示のゲートバルブが閉じるとともに、ステージ駆動部3が動作し、図7(2)に示すように、静電吸着ステージ1を所定の上限位置まで上昇させる。この結果、静電吸着ステージ1の静電吸着面10の上に基板90が載る。支持ピン154の先端は、基板90の裏面から離れた状態となる。この状態で、吸着電源141,142が動作し、前述した実施形態の場合と同様に基板90が静電吸着される。
【0052】
次に、処理終了後に基板90を処理容器2から搬出する場合には、ステージ駆動部3は静電吸着ステージ1を上限位置から下限位置まで下降させる。この結果、基板90が静電吸着ステージ1の静電吸着面10から脱離し、図7(1)に示すのと同様に支持ピン154の上に基板90が載った状態となる。この状態でゲートバルブが開いて搬送ロボットのアーム4が処理容器2内に進入して基板90の下方に位置する。そして、アーム4が所定距離上昇して基板90を受け取り、処理容器2から退出する。
【0053】
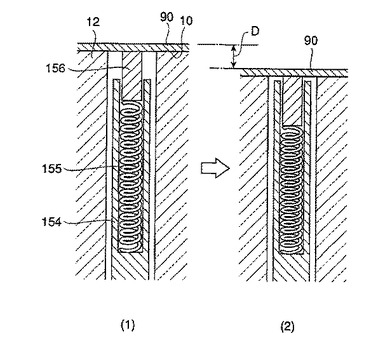
本実施形態における予圧機構は、上述した各支持ピン154内のコイルスプリングと、ステージ駆動部3のサーボモータ34を制御する制御部19等から構成されている。制御部19は、上記基板90の脱離動作の際、上限位置から下限位置に一気に下降させるのではなく、各支持ピン154内のコイルスプリングにより基板90に予圧が与えられる位置に静電吸着ステージ1を一時的に停止させるようになっている。本実施形態の説明では、この位置を「予圧位置」と呼ぶ。この予圧機構の動作について、図8を使用して以下具体的に説明する。図8は、図6に示す基板処理装置の実施形態における予圧機構の動作について説明する図である。
【0054】
前述した脱離動作の際、ステージ駆動部3は、前述したように静電吸着ステージ1を上限位置から下降させる。静電吸着ステージ1が下降すると、基板90の裏面と各支持ピン154の上端との距離が徐々に小さくなり、やがて、各支持ピン154内のコイルスプリング155の上端に設けられた可動ヘッド156に基板90の裏面が接触する(図8(1))。
【0055】
ステージ駆動部3は、静電吸着ステージ1を図8(1)に示す状態からさらに短い所定の距離だけ下降させる(図8(2))。この下降により、基板90の裏面は可動ヘッド156を下方に押し下げるため、コイルスプリング155の弾性により基板90を上方に押し上げる力が基板90に対して与えられる。この際に基板90に与えられる力は、基板90に作用している残留吸着力よりも大きさが小さく静電吸着力とは逆向きの力であり、本実施形態における予圧である。予圧の大きさは、図8(1)の状態から図8(2)の状態にする際の静電吸着ステージ1の下降距離D及びコイルスプリング155のバネ定数によって決まるが、予圧が残留吸着力より大きくならないよう、これらのパラメータが選定される。
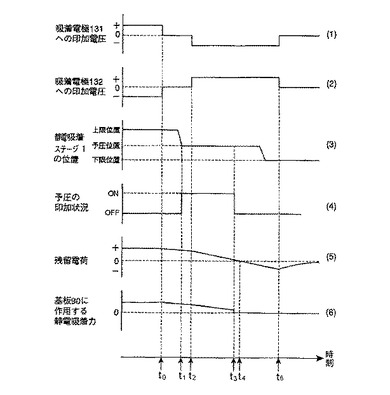
【0056】
本実施形態においても、上述した予圧の印加により、誘電体ブロック12の体積抵抗等を考慮することなく、残留電荷がほぼゼロになるタイミングで確実に基板90の脱離を行うことができる。この点について、図9を使用して説明する。図9は、図6から図8に示す実施形態の装置における静電吸着ステージ1からの基板90の脱離動作について説明するタイミングチャートである。図9中、(1)は吸着電極131への印加電圧を、(2)は吸着電極132への印加電圧を、(3)は静電吸着ステージ1の位置を、(4)は予圧の印加状況を、(5)は誘電体ブロック12の残留電荷を、(6)は基板90に作用する静電吸着力についてそれぞれ時系列的に示している。
【0057】
処理終了後、基板90を静電吸着ステージ1から脱離させるために、時刻t0において、一対の吸着電源141,142の動作を停止させる。この結果、一対の吸着電極131,132への印加電圧は0Vになるものの、誘電体ブロック12の残留電荷により基板90は静電吸着面10に吸着されている。そして、時刻t1においてステージ駆動部3が動作し、静電吸着ステージ1を上限位置から予圧位置に下降させる。この結果、前述した予圧が対象物9に与えられた状態となる。
【0058】
その後、スイッチ駆動部172がスイッチ回路171を駆動させ、一対の吸着電極131,132に対する一対の吸着電源141,142の接続状態を互いに逆にし、時刻t2において一対の吸着電源141,142が動作を再開する。この結果、一対の吸着電極131,132を介して誘電体ブロック12に逆電界が設定される。これによって、誘電体ブロック12の残留電荷は、図9(5)に示すように急速に緩和されて減少する。
【0059】
そして、逆電界の印加が続き、時刻t4において残留電荷がやがてゼロになり、時刻t4を過ぎると、誘電体ブロック12が逆極性に充電されて図9(5)に示すように逆極性の電荷が生ずるようになる。この際、時刻t4より僅かに前のt3において、残留吸着力と予圧とが等しくなり、この時刻t3又はこの時刻t3を過ぎたとたんに、支持ピン154内のコイルスプリング181の弾性により対象物9が少し持ち上がって静電吸着面10から離間する。この結果、ジョンソンラーベク力の解消により静電吸着力は激減する。そして、基板90は、コイルスプリング155の弾性と基板90の自重とが釣り合う高さまで持ち上がり、この状態では残留電荷によるクーロン力は無視できるほど小さい。その後、ステージ駆動部3が静電吸着ステージ1をさらに下降させ、当初の下限位置に位置させる。これによって、基板90の脱離動作が完了する。
【0060】
上記説明から解るように、本実施形態においても、静電吸着面10に残留吸着力が無いか又はあっても影響を受けない状態で基板90が静電吸着面10から脱離するので、基板90の跳びはね、破損、位置ずれ、剥離帯電等の問題が生じない。また、予圧機構によって予圧が与えられているため、残留電荷がゼロになる直前で基板90が静電吸着面10から自動的に離間して静電吸着力が解消される。従って、誘電体ブロック12の体積抵抗等の条件を考慮する必要はなく、極めて実用性が高い。
【0061】
次に、本実施形態の装置の他の構成について説明する。本実施形態の装置は、上述した他、図6に示すように、処理容器2内に所定のプロセスガスを導入するガス導入系5と、処理容器2内に被スパッタ面が露出するよう設けられたターゲット6と、ターゲット6に所定の電圧を印加してスパッタ放電を生じさせるスパッタ電源7と、ターゲット6の背後に設けられた磁石機構8とを備えている。
【0062】
ターゲット6は、絶縁材61を介してスパッタチャンバー1に気密に取り付けられている。ターゲット6の材質は、基板90の表面に作成する薄膜の材質により決まる。スパッタ電源7には、負の直流電源又は高周波電源が使用される。高周波電源が使用される場合、ターゲット6とスパッタ電源7との間に所定のキャパシタンスが設けられ、ターゲット6に自己バイアス電圧を与えてターゲット6をスパッタする。
【0063】
磁石機構8は、放電の効率のよいマグネトロンスパッタを行うために備えられている。具体的には、磁石機構8は、中心磁石81と、中心磁石81を周状に取り囲む周辺磁石82と、中心磁石81及び周辺磁石82を繋ぐ円盤状のヨーク83とから構成されている。
【0064】
ガス導入系5は、所定のプロセスガスを溜めた不図示ボンベと処理容器2とをつなぐ配管に設けられたバルブ51や不図示の流量調整器とから主に構成されている。プロセスガスとしては、アルゴンや窒素等のガスが使用される。
【0065】
本実施形態の装置の全体の動作について、以下に説明する。排気系21によって処理容器2が不図示の予備真空容器と同程度の真空圧力まで排気されている状態で、不図示のゲートバルブを通して基板90を不図示の搬送ロボットにより不図示の予備真空容器から処理容器2内に搬入し、静電吸着ステージ1に載置して静電吸着させる。そして、ゲートバルブを閉じた後、ガス導入系5によって所定のプロセスガスを所定の流量で処理容器2内に導入し、この状態でスパッタ電源7を動作させる。この結果、スパッタ放電が生じてプラズマPが形成される。スパッタ放電によりターゲット6がスパッタされ、基板90の表面に所定の薄膜が作成される。
【0066】
薄膜が所定の厚さに達するまでスパッタを続けた後、スパッタ電源7及びガス導入系5の動作を止める。その後、排気系21によって処理容器2内を再度排気した後、前述したように基板90を静電吸着ステージ1から脱離させ、不図示の搬送ロボットにより処理容器2から不図示の予備真空容器に搬出する。これで一枚の基板90に対する一連の処理が終了する。このような動作を繰り返して、成膜処理を各基板90に対して行う。
【0067】
上述したように、本実施形態の装置は、図1から図3に示す静電吸着ステージ1とは多少異なる構成のものを使用したが、全く同じ構成の静電吸着ステージ1を使用することも勿論可能である。また、本実施形態では、基板処理装置の一例としてスパッタリング装置を採り上げたが、CVD装置やエッチング装置等の他の基板処理装置についても同様に実施できることはいうまでもない。
【0068】
尚、上述したような処理容器2内にプラズマを形成して処理する装置では、プラズマと高周波との相互作用により生ずる自己バイアス電圧により静電吸着を行う構成も採用し得る。この場合には、一対の吸着電極131,132に同様に高周波電圧を印加するか、又は、吸着電極131,132を一つにしてこれに高周波電圧を印加するようにする。プラズマ中のイオン及び電子は高周波によって周期的に静電吸着ステージ1に引きつけられるが、イオンと電子の移動度の違いから電子が多く引きつけられ、その違いを相殺するようにして静電吸着ステージ1の表面は高周波電圧に負の直流分の電圧を重畳したような電位変化となる。この負の直流分の電圧が自己バイアス電圧である。この自己バイアス電圧のみによっても基板90の静電吸着は可能であるが、さらに吸着電極131,132に正の直流電圧を重畳させると、より強い誘電分極を生じるため静電吸着力が高くなる。
【0069】
また、本実施形態では、基板90としては半導体ウェーハが想定されているが、液晶ディスプレイを製作する際の液晶基板やプリント回路を製作する際のプリント基板等についても同様に実施できる。
【実施例】
【0070】
次に、上記基板処理装置の実施形態の実施例について説明する。基板90が直径200mm程度のシリコン半導体ウェーハの場合、静電吸着ステージ1への静電吸着は、一対の吸着電源141,142によって一対の吸着電極131,132に±300V程度の電圧を印加することにより行える。
【0071】
このように静電吸着した基板90を静電吸着ステージ1から脱離させる場合、一対の吸着電源141,142の出力をゼロにした後、1〜3秒程度この状態を保持する。そして、前述した予圧機構により10gf/cm2程度の予圧を基板90に印加する。そして、スイッチ回路171を動作させて極性を切り替え、±500V程度の電圧を印加して誘電体ブロック12に逆電界を設定する。この状態を5秒程度維持した後、脱離機構15を最終的に動作させ、基板90を静電吸着ステージ1から脱離する。この脱離動作までには、残留電荷がゼロになるタイミングで基板90は静電吸着面10から自動的に離間しており、基板90の跳びはね、破損、位置ずれ、剥離帯電等は生じない。
【0072】
残留電荷がゼロになるタイミングは、前述したように、基板90の種類や表面の構成、誘電体ブロック12の体積抵抗のバラツキ等により変化するが、上記条件による場合、予圧印加状態で逆電界を設定する時間を5秒程度に設定すれば、殆どすべての場合において自動的に基板90が静電吸着面10から離間する。尚、与えるべき予圧の大きさは、前述した通り脱離の際の残留吸着力によって変わる。そして、残留吸着力は基板90を静電吸着する際の電圧によって変わる。上述したような基板処理装置の場合、静電吸着用の電圧は500V〜1000V程度である。この場合、予圧の大きさは10gf/cm2〜30gf/cm2程度であることが好ましい。10gf/cm2より小さいと、基板90が静電吸着面10からうまく離間しない恐れがある。また、30gf/cm2より大きいと、離間の際に基板90の跳びはねが生ずる恐れがある。
【0073】
上述した各実施形態及び実施例において、吸着電極131,132は一対のものであったが、二対、三対、又はそれ以上であってもよい。また、誘電体ブロック12外の電極との間で電界を設定する構成であれば、吸着電極は一つであってもよい。脱離機構15の構成としては、前述したような昇降ピン151又は支持ピン154を使用するものの他、複数のフック状の部材を対象物9の周縁部分に引っ掛けて対象物9を脱離させる構成でもよい。さらに、脱離機構15が予圧機構に兼用されていない構成も考えられる。例えば、脱離機構15とは別に前述したような昇降ピンを設けて予圧機構としてもよい。また、複数のフック状の部材を対象物9の周縁部分に引っ掛けて対象物9を静電吸着面10から引き離す力を予圧として与える構成でもよい。
【0074】
本願の発明における予圧は、静電吸着力とは逆向きの力であるが、完全に逆向きの力でなくともよい。静電吸着面から対象物9又は基板90を離間させる方向の力であればよく、静電吸着面に対して斜めに作用する力の場合もある。尚、本願における静電吸着ステージの発明は、前述したような基板処理装置の他、基板の表面を検査する装置等に使用することが可能である。
【符号の説明】
【0075】
1 静電吸着ステージ
11 ステージ本体
12 誘電体ブロック
131 吸着電極
132 吸着電極
141 吸着電源
142 吸着電源
15 脱離機構
151 昇降ピン
152 ピン保持板
153 ピン駆動部
154 支持ピン
155 コイルスプリング
156 可動ヘッド
17 逆電界設定機構
171 スイッチ回路
172 スイッチ駆動部
181 コイルスプリング
182 可動ヘッド
2 処理容器
3 ステージ駆動部
4 アーム
5 ガス導入系
6 ターゲット
7 スパッタ電源
8 磁石機構
9 対象物
90 基板
【特許請求の範囲】
【請求項1】
処理容器と、
前記処理容器内にプロセスガスを導入するためのガス導入手段と、
前記処理容器内に被スパッタ面が露出するように設けられたターゲットと、
誘電体ブロックと該誘電体ブロック内に設けられた吸着電極と有し、基板を保持するための静電吸着ステージと、
該誘電体ブロックに静電吸着用の電界とは逆向きの電界を設定するための逆電界設定機構と、
静電吸着面から基板を離間させるために機械的な圧力を対象物に与えるための予圧機構と、
を具備し、
前記吸着電極への印加電圧を停止にした後、
前記予圧機構を作動して基板に機械的圧力を印加し、その後、前記逆電界設定機構により、該静電吸着用の電界とは逆向きの電界を前記静電吸着ブロックに与えるように構成されていることを特徴とするスパッタリング装置。
【請求項1】
処理容器と、
前記処理容器内にプロセスガスを導入するためのガス導入手段と、
前記処理容器内に被スパッタ面が露出するように設けられたターゲットと、
誘電体ブロックと該誘電体ブロック内に設けられた吸着電極と有し、基板を保持するための静電吸着ステージと、
該誘電体ブロックに静電吸着用の電界とは逆向きの電界を設定するための逆電界設定機構と、
静電吸着面から基板を離間させるために機械的な圧力を対象物に与えるための予圧機構と、
を具備し、
前記吸着電極への印加電圧を停止にした後、
前記予圧機構を作動して基板に機械的圧力を印加し、その後、前記逆電界設定機構により、該静電吸着用の電界とは逆向きの電界を前記静電吸着ブロックに与えるように構成されていることを特徴とするスパッタリング装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2009−164620(P2009−164620A)
【公開日】平成21年7月23日(2009.7.23)
【国際特許分類】
【出願番号】特願2009−30633(P2009−30633)
【出願日】平成21年2月13日(2009.2.13)
【分割の表示】特願平11−226948の分割
【原出願日】平成11年8月10日(1999.8.10)
【出願人】(000227294)キヤノンアネルバ株式会社 (564)
【Fターム(参考)】
【公開日】平成21年7月23日(2009.7.23)
【国際特許分類】
【出願日】平成21年2月13日(2009.2.13)
【分割の表示】特願平11−226948の分割
【原出願日】平成11年8月10日(1999.8.10)
【出願人】(000227294)キヤノンアネルバ株式会社 (564)
【Fターム(参考)】
[ Back to top ]