
スプリットビーム方式合成開口レーダ
【課題】複数のパラボラアンテナを設置する必要がなく、コンパクトなアンテナ系にできるため、小型航空機やヘリコプタ、リモコンで操縦可能な無人飛行機等にも搭載できるスプリットビーム方式合成開口レーダを提供する。
【解決手段】放射方向が僅かに異なり、ビームのメインローブが互いにオーバーラップしている2つのマイクロ波によるチャープ波を照射帯に向けて同時に照射する2つの一次放射器11,12を備えるとともに、照射帯からの反射波を2系統独立に受信するスプリットビーム送受信アンテナと、受信した2系統の反射波からの画像データの振幅差に基づき、静止物体の画像を除去して移動体の画像のみを抽出する手段と、抽出された移動体の画像に基づいて当該移動体の位置と速度を同定する手段とを備えたスプリットビーム方式合成開口レーダ。
【解決手段】放射方向が僅かに異なり、ビームのメインローブが互いにオーバーラップしている2つのマイクロ波によるチャープ波を照射帯に向けて同時に照射する2つの一次放射器11,12を備えるとともに、照射帯からの反射波を2系統独立に受信するスプリットビーム送受信アンテナと、受信した2系統の反射波からの画像データの振幅差に基づき、静止物体の画像を除去して移動体の画像のみを抽出する手段と、抽出された移動体の画像に基づいて当該移動体の位置と速度を同定する手段とを備えたスプリットビーム方式合成開口レーダ。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、少し方向が異なる二つ以上の送信ビーム(スプリットビーム)を用いて移動体、およびその速度を検出できるスプリットビーム方式合成開口レーダに関する。
【背景技術】
【0002】
マイクロ波を利用して地球の観測を行うと、雲があっても、また夜間でも地表面を観測することができる。これが、光の反射を利用して対象物を観測する光学的撮影方式に対して優れた点である。しかし、マイクロ波は波長が光に比べて長いため、解像度を上げようとすると非常に大きな開口のアンテナが必要となる。合成開口レーダ(Synthetic Aperture Radar、以下SARとも略記する)は、飛翔体に搭載して移動しながら観測することにより、見かけ上のアンテナの開口を大きくし、電波の位相の違いを測ることにより、解像度を飛躍的に高めることができる。これにより、夜間、曇天、雨天、火炎・煙中にかかわらず全天候的な静止画像が得られる。
合成開口レーダ(SAR)システムの概要が、非特許文献1、2に示されており、これを図1、図2に示す。
【0003】
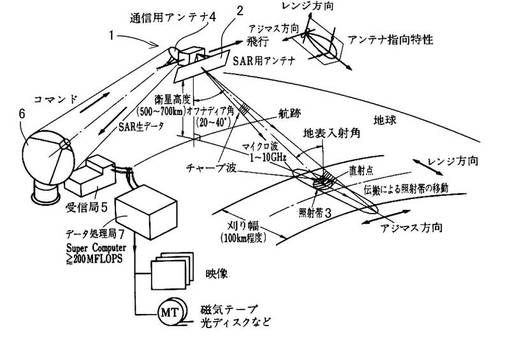
図1は衛星搭載型のストリップマップモードSARシステムを模式的に示したものである。同図に示されているように、レーダ本体1で生成されたパルス状のマイクロ波が、飛行方向に長く展開した矩形のSAR用アンテナ2から送出され、航跡に対して約90度の方向で斜め下方に扇状に広がり、地表を掃引するように照射する。特定の位置の照射帯3から戻ってきた反射波は同一のSAR用アンテナ2で受信し、ヘテロダイン検波の後にレーダ本体1内蔵のデータレコーダに記録する。これを毎秒1000〜2000回の割合で繰返し、一連のデータを得る。この生データは、通信用アンテナ4から、地上の受信局5のアンテナ6に向けて送信する。受信局5では、データ処理局7にデータを送信し、計算機や光学系による映像化処理を行って、高精細な画像を生成する。
【0004】
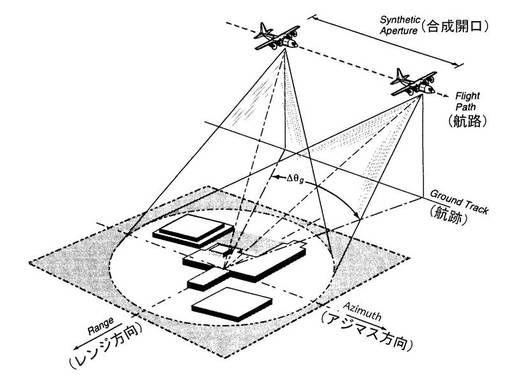
図2は航空機搭載型のスポットライトモードSARシステムを模式的に示したものである。同図に示されているように、レーダ本体で生成されたパルス状のマイクロ波がSAR用アンテナから送出され、航跡に対してある角度で発射され、斜め下方に扇状に広がり、地表の特定の位置を照射する。特定の位置の照射帯から戻ってきた反射波は同一のSAR用アンテナで受信し、ヘテロダイン検波の後にレーダ本体内蔵のデータレコーダに記録する。レーダを搭載した航空機はこれを毎秒1000〜2000回の割合で繰返しながらフライトパスを飛行し、一連のデータを得る。この生データに、計算機による映像化処理を行って、高品質な映像を生成する。
【0005】
ストリップマップモードとスポットライトモードの違いは、前者がマイクロ波の照射方向は航跡に対して90度と一定で飛翔体の飛行に伴って地表を掃引するのに対し、後者は、図2のΔθgの角度の間、同じ対象物に対してスポットライト状にマイクロ波を照射する点である。
【0006】
通常のマイクロ波レーダは、アンテナから周波数変調(チャープ)されたマイクロ波を送信し、照射帯からの反射波をアンテナで受信し、信号処理することにより、レンジ方向の位置分解を行っている。レンジ方向の空間分解能は使用するチャープマイクロ波の帯域に依存するが、10cm程度の分解は十分可能である。一方、アジマス方向の空間分解能は照射帯のアジマス方向の幅、すなわち送信ビームの幅で決まる。高指向性のアンテナを用いた時でさえ100km以上伝搬させると数100m程度に広がるため、物体形状を特定することができない。
【0007】
これに対し、合成開口レーダはアジマス方向の空間分解能を劇的に向上させる技術である。すなわち、図1、2に示すように、レーダ本体1をアジマス方向に移動させながら、SAR用アンテナ2からレーダ照射を繰り返し行う。すると特定の位置の照射帯3からの受信信号は、レーダ本体1がアジマス方向に移動したことによりドップラー変調された状態で観測され、フーリエ変換することでアジマス方向に分解された画像を得ることができる。以上の処理を合成開口処理と呼び、レーダがアジマス方向に移動した距離を合成開口長と呼ぶ。合成開口処理によりアジマス方向の空間分解能は大きく改善され、合成開口長を十分長く取れば10cm以下となり、レンジ方向の空間分解能と合わせて精細な画像を取得できるようになる。
【0008】
なお、本発明と関連する合成開口レーダ技術として、例えば次の特許文献1〜5が挙げられる。
特許文献1には、人工衛星等の飛翔体に搭載して地球表面等の観測を行なう合成開口レーダにおいて、送信信号を生成するためのチャープパルス発生器と、送信信号を分配するための分配器と、送信信号を所定のレベルまで増幅するための高出力増幅器と、送信信号と受信信号とを分離するための送受分波器と、送信信号及び受信信号の送受信を行なうための固定ビーム型一次元フェーズドアレイアンテナから成る複開口面アンテナと、受信信号を増幅するための受信機と、増幅された受信信号のA/D変換及びフォーマット化を行なうための信号処理器とを具備して、所定の固定オフナディア角で、且つ飛翔体のクロストラック方向に複域走査を可能ならしめる合成開口レーダが開示されている。
【0009】
特許文献2には、1つのアレーアンテナの開口を4分割した第1〜第4のサブ開口と、上記第1〜第4のサブ開口の入出力を合成/分配し、2本の送受信ビームを生成する第1〜第4のハイブリッド合成器及び第1、第2の移相器と、2本のビームの送信、受信時の信号の流れを制御するためのサーキュレータ及び第2のサーキュレータと、2本のビームの送信波を生成する送信機及び第2の送信機と、2本のビーム出力を受信しビデオ段のアナログ信号に変換する受信機及び第2の受信機と、上記受信機、第2の受信機の出力をサンプルし、ディジタル信号に変換するA/Dコンバータ及び第2のA/Dコンバータと、上記A/Dコンバータ、第2のA/Dコンバータの出力をそれぞれレンジ圧縮、アジマス方向フーリエ変換、スペクトル合成し、その後に合成開口処理を行うことによって、高分解能画像を得る合成開口レーダが開示されている。
【0010】
特許文献3には、移動する飛行体に搭載された合成開口レーダ(SAR)によって得られるSAR画像生成用パルスデータ及び飛行体の慣性データを入力するデータ入力部と、SAR画像生成に用いるパラメータをレンジ方向のサブパッチ画像毎に計算するパラメータ計算部と、上記パラメータ計算部により得られたパラメータに基づきサブパッチ画像毎に画像生成処理の開始及び終了を決定するタイミング制御部と、上記パラメータ計算部によって得られるパラメータ、並びにタイミング制御部によって得られるタイミングに基づき上記データ入力部から継続して入力されるパルスデータをサブパッチ画像毎に画像生成処理を行う信号処理装置と、上記信号処理装置より継続して得られる複数のサブパッチ画像をその位置に応じて表示する画像表示装置とを備えた合成開口レーダ信号処理装置が開示されている。
【0011】
特許文献4には、移動プラットフォームに搭載され、地表や海面のレーダ画像を取得する合成開口レーダにおいて、1系の送信アンテナと2系の受信アンテナとを備え、前記送信アンテナのアジマス方向の送信アンテナビームのビーム幅を前記受信アンテナの受信アンテナビームのビーム幅の2倍となるように設定するとともに、2系の前記受信アンテナの受信アンテナビームのうち、片方の受信アンテナビームは前記移動プラットフォームの進行方向側に向け、もう一方の受信アンテナビームは移動プラットフォームの進行方向とは逆側に向けるように構成する合成開口レーダが開示されている。
【0012】
特許文献5には、アンテナ部と、制御系を含む電気回路部と、SAR画像装置と、コンパクト・ポラリメトリSAR処理装置とを有し、前記アンテナ部が、送受信モジュール毎に送信偏波を水平偏波又は垂直偏波に切替可能であって、水平偏波と垂直偏波の2つの偏波で同時に受信可能な垂直・水平偏波共用フェーズドアレイアンテナであり、前記制御系が、送信時に前記フェーズドアレイアンテナのアンテナ面を電気的に分割して、その一方を水平偏波送信、残りを垂直偏波送信に設定し、受信時に水平偏波と垂直偏波の2偏波同時受信に設定するものであり、前記コンパクト・ポラリメトリSAR処理装置が、前記アンテナ部・前記電気回路部により送受信され前記SAR画像再生装置により各々画像化された複素データである水平偏波受信データと垂直偏波受信データとをターゲットベクトルとして取扱い、フルポラリメトリのターゲットベクトルの共分散行列に相当する演算結果を得ることでコンパクト・ポラリメトリSAR処理を行う合成開口レーダが開示されている。
【先行技術文献】
【特許文献】
【0013】
【特許文献1】特開平6−331737号公報
【特許文献2】特開平8−166447号公報
【特許文献3】特開2004−191052号公報
【特許文献4】特開2008−203228号公報
【特許文献5】特開2009−74918号公報
【非特許文献】
【0014】
【非特許文献1】安藤繁「合成開口レーダと間接計測技術」計測と制御、Vol.22,No.2(昭和58年2月)
【非特許文献2】"SPOTLIGHT-MODE SYNTHETIC APERTURE RADAR: A SIGNAL PROCESSING APPROACH" Charles V. Jakowatz, Jr., Daniel E. Wahl, Dennis C. Ghiglia, Paul A. Thompson Springer, 1996
【発明の概要】
【発明が解決しようとする課題】
【0015】
近年、衛星に搭載された合成開口レーダは、陸域・海域の観測や災害監視に威力を発揮しつつある。しかし、我国の探査衛星“だいち”に搭載された合成開口レーダでは、地球周回軌道からの数10日おきの周期的観測しかできず、また、Lバンド(1.27GHz)マイクロ波を利用し、ストリップマップ法を採用しているため空間分解能は高々5m〜100m程度である。このため、随時緊急対応と高分解能が要求される人命救助・災害監視などに役立たない。
【0016】
また、これまで我国で試験的に開発された航空機搭載SARは、Xバンド(9.55GHz)のマイクロ波を用い、ストリップマップ法を採用しているため、空間分解能は高々1.5mである。このためマイクロ波反射が少ない「人間」のような小さな物体の検出は困難である。
【0017】
上述したように合成開口レーダは、レーダ本体を飛翔体でアジマス方向に移動させながらレーダ計測を繰り返し行い、ドップラー変調された複数の受信信号を処理することにより精細なレーダ画像を出力するものである。ここでレーダ画像において、静止物体のレーダイメージは正確な画像位置に再構成される。ところがレンジ方向に移動している移動体の場合には、ドップラー変調量が変化するため、移動体のレーダイメージはアジマス方向に変位した画像位置に再構成される。変位量はレンジ方向の移動速度に比例する。この時変位した位置に静止物体からのイメージが重なると、双方を見分けることは通常困難である。
【0018】
さらに、合成開口レーダを用いた従来の移動体検出法は、アンテナ間距離を1メートル以上飛行方向に離した2個以上のアンテナを使い、それらのアンテナによる受信信号の位相差を検出することによりクラッターキャンセリングを行っている。小型航空機等には飛行方向に複数のアンテナを設置するスペースを確保することは通常困難である。
【0019】
本発明が解決しようとする課題は、複数のパラボラアンテナを設置する必要がなく、コンパクトなアンテナ系にできるため、小型航空機やヘリコプタ、リモコンで操縦可能な無人飛行機等にも搭載できる移動体検出用のスプリットビーム方式合成開口レーダを提供することを目的とする。
【課題を解決するための手段】
【0020】
前記課題を解決するため、本発明の第1の構成は、飛翔体に搭載され、対象物に向けて照射したマイクロ波の反射波に基づいて対象物のイメージを取得するスポットライトモードの合成開口レーダにおいて、
放射方向が僅かに異なり、ビームのメインローブが互いにオーバーラップしている少なくとも2つのチャープマイクロ波のビームを対象物に向けて同時に照射する少なくとも2つの一次放射器を備えるとともに、前記チャープ波ビームによる前記対象物からの反射波を前記少なくとも2つの一次放射器で各系統独立に受信するスプリットビーム送受信アンテナと、
前記受信した少なくとも2系統の反射波からの画像データの画像強度比に基づき、静止物体の画像を除去して移動体の画像のみを抽出するクラッターキャンセリング手段と、
抽出された前記移動体の画像に基づいて当該移動体の位置・速度同定手段とを備えたスプリットビーム方式合成開口レーダである。
【0021】
ここで「スプリットビーム」とは、一つのパラボラアンテナの焦点から少しずれた位置に少なくとも2つ(2つ以上)の小さい一次放射器を配置することによって得られるマイクロ波ビームである。
「クラッターキャンセリング」とは、「移動体」のみを抽出するために、測定された画像から「静止物体」画像をキャンセルすることである。
【0022】
本発明の第2の構成は、前記クラッターキャンセリング手段であり、第1系統の受信機により得られた画像データの画像強度に第2系統の送受信ゲインを乗じたものと、第2系統の受信機により得られた画像データの画像強度に第1系統の送受信ゲインを乗じたものの差(以下「積差」という)を演算することにより、前記積差が0の時は対象物が静止物体であると判断し、前記積差が0でないときは対象物が移動体であると判断する機能を有しているスプリットビーム方式合成開口レーダである。
【0023】
本発明の第3の構成は、前記移動体位置・速度同定手段であり、第2の構成における前記クラッターキャンセリング手段により、アンテナの送受信ゲインデータベースから前記積差が0になる変位量を求め、前記変位量から移動体の位置と速度を同定する機能を有しているスプリットビーム方式合成開口レーダである。
【0024】
本発明は航空機や船舶等に搭載可能なスプリットビーム方式合成開口レーダであり、少し方向が異なる2つ以上の送信ビーム(スプリットビーム)の物体のからの反射波を2つ以上の1次放射器により受信し、クラッターキャンセリングをし、移動体の位置と速度を検出する。
【発明の効果】
【0025】
本発明の方式を採用すると、飛行方向に複数のパラボラアンテナを設置する必要がなく、コンパクトなアンテナ系にでき、総重量の軽量化を図ることができる。このため小型航空機やヘリコプタ、無人飛行機等にも搭載できる移動体検出可能なSARである。
高空間分解能のSAR画像を取得するために、「ストリップマップモード」でなく「スポットライトモード」を採用している。
これら小型軽量・高分解能・移動体検出等の特長を活かすことにより、小型航空機等による全天候型人命救助・災害監視がはじめて可能となる。
また、ITS(Intelligent Transport Systems:高速道路交通システム)等の全天候交通監視システム等にも応用でき、社会的インフラとしての波及効果は大きい。
【図面の簡単な説明】
【0026】
【図1】ストリップマップモードの合成開口レーダシステムの概要を示す説明図である。
【図2】スポットライトモードの合成開口レーダシステムの概要を示す説明図である。
【図3】本発明の実施の形態において用いるスプリットビーム送受信アンテナを示す正面図である。
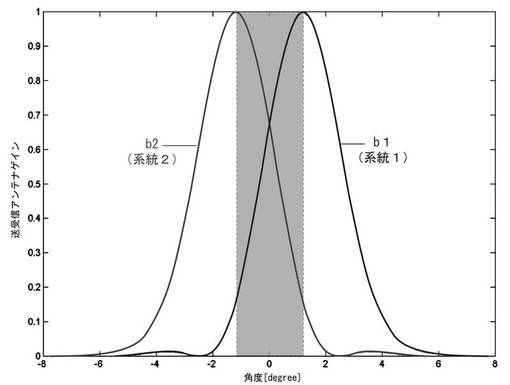
【図4】本発明の実施の形態における2つのビームの送受信ゲインの角度分布を示すグラフである。
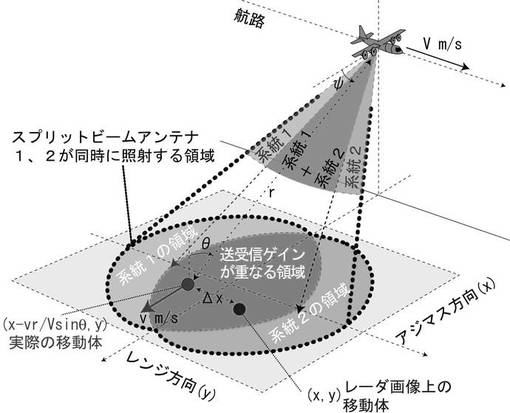
【図5】本発明の実施の形態における式(1)の各種変数を示す説明図である。
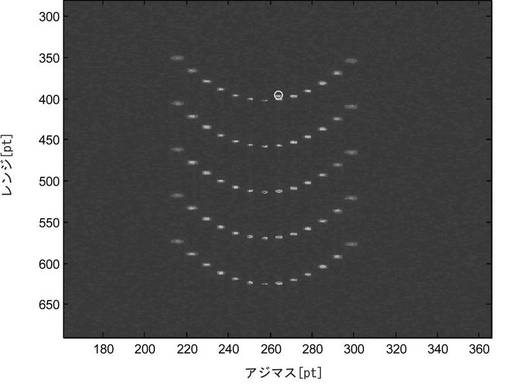
【図6】本発明の実施の形態における合成開口処理後のクラッターと移動体の強度イメージである。
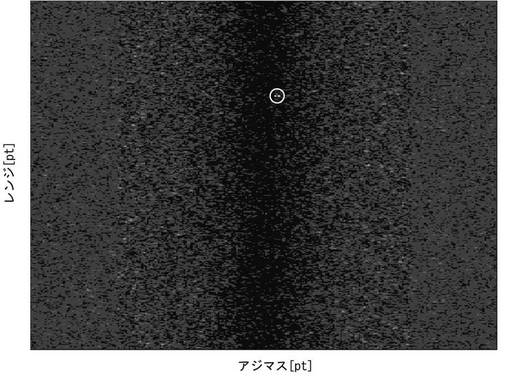
【図7】本発明の実施の形態におけるクラッターキャンセル後の移動体のイメージである。
【発明を実施するための形態】
【0027】
以下、本発明の実施の形態について説明する。
1.スプリットビーム方式合成開口レーダによる移動体検知
本発明に係るスプリットビーム方式合成開口レーダは、後述する2つ(以上)のマイクロ波ビームを送受信するアンテナ等のハードウェアと、信号処理でクラッターキャンセルし、移動体のみの可視化を行うアルゴリズムにより構成されている。クラッターとは静止物体のイメージのことであり、クラッターキャンセルにより移動体のイメージのみ表示できる。クラッターキャンセルのためには、ハードウェア・アルゴリズム共に必要となる。
【0028】
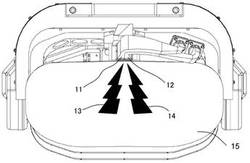
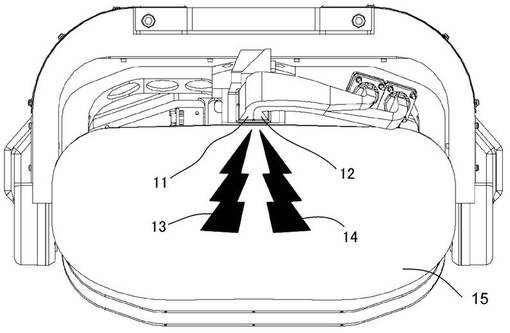
2.スプリットビーム送受信アンテナ
スプリットビーム送受信アンテナを図3に示す。図に示すように、水平方向に隣接した2つの1次放射器11,12から同一のチャープマイクロ波13,14が同時に送信される。双方の送信波はパラボラ反射鏡15を通してターゲット(対象物)に入射される。ターゲットからの反射波をパラボラ反射鏡15を通して2つの1次放射器11,12で独立に受信する。1次放射器11,12の各送受信方向を調整し、2系統の送受信ゲインの角度分布を図4のようにすることが可能である。
図4に示すように、各系統の送受信ゲインb1,b2は2度程度異なる方向を向いていて(スプリット)、かつビームのメインローブがオーバーラップしている。オーバーラップした角度領域で次に述べるクラッターキャンセル処理を行う。
【0029】
3.クラッターキャンセル手法
ある特定の位置に静止物体がある場合を考える。上述したように、各々の送受信ゲインは図4に示すように、一方が角度の増加にともない送受信ゲインが単調に増加し、他方のゲインは単調に減少するように、レーダに照射される領域の送受信ゲインが空間分布を持つよう設計されている。レーダから静止物体方向の各系統の送受信ゲインはアンテナ特性データベース(図4参照)より求まる。各系統より得られる静止物体のレーダ画像強度は、各系統の静止物体方向の送受信ゲインに比例している。そのため、系統1により得られた静止物体の画像強度に系統2の送受信ゲインを乗じたものは、系統2より得られた画像強度に系統1の送受信ゲインを乗じたものに等しい。従ってそれぞれの積の差をとると0になる。ところが移動体の場合はこの積の差は0にならない。これは移動体の画像位置が現実の位置と異なるためである。画像強度は現実の移動体方向の送受信アンテナゲインに比例していて、レーダ画像面における移動体方向の送受信アンテナゲインには比例しない。以上のように1セットの画像強度と送受信ゲインの積の差をプロットすると、静止物体は0になり移動体は有限な値を持つため移動体のみ抽出できる。
【0030】
具体的には次の手法でクラッターキャンセルを行う。
図3の左の送受信系を系統1とし、右を系統2とすると、各系統で得られるレーダ画像強度aiは次式で表せる。
【0031】
【数1】

【0032】
ここで、iは系統の番号に対応し、また式中の変数x,y,θ,ψは図5に示すとおりであり、gi,σm,σs,r,V,vは次のように定義される。
gi(α,β):系統1,2の水平角α、仰角βにおける送受信ゲイン
σm(x,y),σs(x,y):移動体と静止物体のレーダ断面積
r:レンジ
V:飛翔体の速度
v:ターゲットのレンジ方向速度
【0033】
式(1)は、各系統の(x,ycosψ)の位置における画像の信号強度は、(x−vr/Vsinθ,y)にある移動体のイメージと、(x,y)にある静止物体のイメージとの重ね合わせであることを意味する。図5に示すように、移動体のイメージは速度に比例した変位量Δx=(vr/Vsinθ)だけアジマス方向にずれる。
ここで、両チャンネルのレーダ画像データより次の計算を行う。
【0034】
【数2】
ここで、
【0035】
【数3】
【0036】
(2)式において、a1,a2はレーダにより得られる画像強度データであり、g1,g2は図4のb1,b2に示すようにアンテナの設計で決定される送受信ゲインである。v=0のとき(3)式=0となり、静止物体のイメージは(2)式に寄与しないことがわかる。従って、Fをプロットすることにより移動体のイメージのみ観測可能になる。
【0037】
4.レンジ方向の速度同定と、アジマス方向の位置同定
レンジ方向に一定速度で移動する移動体のレーダイメージはアジマス方向に変位するが、移動体の速度と現実の位置は次のように同定される。レーダ画像における移動体の位置に静止物体がない時、あるいは移動体の画像イメージが静止物体の表示領域外まで変位した時、そのイメージは移動体のみによって生成されていることになる。したがって、(1)式を用いてビーム1と2の画像強度の比をとると次式が得られる。
【0038】
【数4】
【0039】
(4)式は移動体の画像強度の比は、移動体の現実の位置における系統1と2の送受信アンテナゲインの比であることを示している。x,V,θ,ψ,rとも既知であるので、移動体の速度vが求まる。例えば、系統1と2の各々で計測された2次元画像aiの座標(x,ycosψ)に点状の像が写っていたとする。ここでa1とa2の画像強度の比をとる。座標(x,ycosψ)に写った像が静止物体によるものの場合、画像強度の比は、系統1および2の送受信ゲインの比と一致する。しかし移動体による像の場合は一致しない。これは移動体の画像位置が現実の位置とは異なるためである。送受信ゲインの分布gはアンテナの特性で決まっている。したがって計算機を用いて系統1と2の送受信ゲインの比が、画像の強度比と一致するようなアジマス方向の変位量Δxを求めることができる。このΔxから移動体の実際の位置が同定される。またアジマス方向の変位量はΔx=vr/Vsinθと表されるので、移動体の速度vは以下の式から算出できる。
【0040】
【数5】
【0041】
5.クラッターキャンセルのシミュレーション実験
クラッターキャンセルのシミュレーションを行った。シミュレーションの条件はレーダ本体から10km離れた位置に速度1m/sの移動体を配置すると共に、周囲に多数の静止物体を配置した。図6に合成開口処理後の画像を示す。
【0042】
図6は縦軸がレンジ方向で、横軸がアジマス方向である。図上に移動体のイメージのみ○印をつけたが、現実のSARでは区別できない。図7は図6の画像データに、上述したクラッターキャンセル処理を行った画像を示している。図6のようにクラッターはすべてキャンセルされ、○で示した移動体のみが表示されている。図7は現実のSAR計測で必ず重畳されるノイズ(NF:4dB)を含む状態でシミュレーションを行った結果であり、中心部から左右外側に行くにしたがいノイズが多くなっている。これは外側ほど、アンテナより照射されるマイクロ波強度が低くなるためである。
【0043】
検出できる最低速度はノイズの大きさで決定される。アンプノイズ・アンテナゲイン・サイドローブ等の熟慮した設計によりノイズを抑えることが可能で、数cm/sで移動する物体の検出が可能である。
なお、高分解能(0.1m)のためには、Kuバンド(12〜18GHz)〜Kaバンド(26〜40GHz)のマイクロ波を用い、またスポットライトモードのSAR画像データ取得方法を用いることが好適である。
【産業上の利用可能性】
【0044】
本発明のスプリットビーム方式合成開口レーダは、複数のパラボラアンテナを設置する必要がなく、コンパクトなアンテナ系にできため、小型航空機やヘリコプタ等にも搭載できるスプリットビーム方式合成開口レーダとして、陸域・海域の観測や災害監視等、人が近づきにくい場所や危険な場所の監視に有用である。また、ITS(Intelligent Transport Systems:高速道路交通システム)等の全天候交通監視システム等にも応用できる。
【符号の説明】
【0045】
1 レーダ本体
2 SAR用アンテナ
3 照射帯
4 通信用アンテナ
5 受信局
6 アンテナ
7 データ処理局
11,12 1次放射器
13,14 チャープマイクロ波
15 パラボラ反射鏡
【技術分野】
【0001】
本発明は、少し方向が異なる二つ以上の送信ビーム(スプリットビーム)を用いて移動体、およびその速度を検出できるスプリットビーム方式合成開口レーダに関する。
【背景技術】
【0002】
マイクロ波を利用して地球の観測を行うと、雲があっても、また夜間でも地表面を観測することができる。これが、光の反射を利用して対象物を観測する光学的撮影方式に対して優れた点である。しかし、マイクロ波は波長が光に比べて長いため、解像度を上げようとすると非常に大きな開口のアンテナが必要となる。合成開口レーダ(Synthetic Aperture Radar、以下SARとも略記する)は、飛翔体に搭載して移動しながら観測することにより、見かけ上のアンテナの開口を大きくし、電波の位相の違いを測ることにより、解像度を飛躍的に高めることができる。これにより、夜間、曇天、雨天、火炎・煙中にかかわらず全天候的な静止画像が得られる。
合成開口レーダ(SAR)システムの概要が、非特許文献1、2に示されており、これを図1、図2に示す。
【0003】
図1は衛星搭載型のストリップマップモードSARシステムを模式的に示したものである。同図に示されているように、レーダ本体1で生成されたパルス状のマイクロ波が、飛行方向に長く展開した矩形のSAR用アンテナ2から送出され、航跡に対して約90度の方向で斜め下方に扇状に広がり、地表を掃引するように照射する。特定の位置の照射帯3から戻ってきた反射波は同一のSAR用アンテナ2で受信し、ヘテロダイン検波の後にレーダ本体1内蔵のデータレコーダに記録する。これを毎秒1000〜2000回の割合で繰返し、一連のデータを得る。この生データは、通信用アンテナ4から、地上の受信局5のアンテナ6に向けて送信する。受信局5では、データ処理局7にデータを送信し、計算機や光学系による映像化処理を行って、高精細な画像を生成する。
【0004】
図2は航空機搭載型のスポットライトモードSARシステムを模式的に示したものである。同図に示されているように、レーダ本体で生成されたパルス状のマイクロ波がSAR用アンテナから送出され、航跡に対してある角度で発射され、斜め下方に扇状に広がり、地表の特定の位置を照射する。特定の位置の照射帯から戻ってきた反射波は同一のSAR用アンテナで受信し、ヘテロダイン検波の後にレーダ本体内蔵のデータレコーダに記録する。レーダを搭載した航空機はこれを毎秒1000〜2000回の割合で繰返しながらフライトパスを飛行し、一連のデータを得る。この生データに、計算機による映像化処理を行って、高品質な映像を生成する。
【0005】
ストリップマップモードとスポットライトモードの違いは、前者がマイクロ波の照射方向は航跡に対して90度と一定で飛翔体の飛行に伴って地表を掃引するのに対し、後者は、図2のΔθgの角度の間、同じ対象物に対してスポットライト状にマイクロ波を照射する点である。
【0006】
通常のマイクロ波レーダは、アンテナから周波数変調(チャープ)されたマイクロ波を送信し、照射帯からの反射波をアンテナで受信し、信号処理することにより、レンジ方向の位置分解を行っている。レンジ方向の空間分解能は使用するチャープマイクロ波の帯域に依存するが、10cm程度の分解は十分可能である。一方、アジマス方向の空間分解能は照射帯のアジマス方向の幅、すなわち送信ビームの幅で決まる。高指向性のアンテナを用いた時でさえ100km以上伝搬させると数100m程度に広がるため、物体形状を特定することができない。
【0007】
これに対し、合成開口レーダはアジマス方向の空間分解能を劇的に向上させる技術である。すなわち、図1、2に示すように、レーダ本体1をアジマス方向に移動させながら、SAR用アンテナ2からレーダ照射を繰り返し行う。すると特定の位置の照射帯3からの受信信号は、レーダ本体1がアジマス方向に移動したことによりドップラー変調された状態で観測され、フーリエ変換することでアジマス方向に分解された画像を得ることができる。以上の処理を合成開口処理と呼び、レーダがアジマス方向に移動した距離を合成開口長と呼ぶ。合成開口処理によりアジマス方向の空間分解能は大きく改善され、合成開口長を十分長く取れば10cm以下となり、レンジ方向の空間分解能と合わせて精細な画像を取得できるようになる。
【0008】
なお、本発明と関連する合成開口レーダ技術として、例えば次の特許文献1〜5が挙げられる。
特許文献1には、人工衛星等の飛翔体に搭載して地球表面等の観測を行なう合成開口レーダにおいて、送信信号を生成するためのチャープパルス発生器と、送信信号を分配するための分配器と、送信信号を所定のレベルまで増幅するための高出力増幅器と、送信信号と受信信号とを分離するための送受分波器と、送信信号及び受信信号の送受信を行なうための固定ビーム型一次元フェーズドアレイアンテナから成る複開口面アンテナと、受信信号を増幅するための受信機と、増幅された受信信号のA/D変換及びフォーマット化を行なうための信号処理器とを具備して、所定の固定オフナディア角で、且つ飛翔体のクロストラック方向に複域走査を可能ならしめる合成開口レーダが開示されている。
【0009】
特許文献2には、1つのアレーアンテナの開口を4分割した第1〜第4のサブ開口と、上記第1〜第4のサブ開口の入出力を合成/分配し、2本の送受信ビームを生成する第1〜第4のハイブリッド合成器及び第1、第2の移相器と、2本のビームの送信、受信時の信号の流れを制御するためのサーキュレータ及び第2のサーキュレータと、2本のビームの送信波を生成する送信機及び第2の送信機と、2本のビーム出力を受信しビデオ段のアナログ信号に変換する受信機及び第2の受信機と、上記受信機、第2の受信機の出力をサンプルし、ディジタル信号に変換するA/Dコンバータ及び第2のA/Dコンバータと、上記A/Dコンバータ、第2のA/Dコンバータの出力をそれぞれレンジ圧縮、アジマス方向フーリエ変換、スペクトル合成し、その後に合成開口処理を行うことによって、高分解能画像を得る合成開口レーダが開示されている。
【0010】
特許文献3には、移動する飛行体に搭載された合成開口レーダ(SAR)によって得られるSAR画像生成用パルスデータ及び飛行体の慣性データを入力するデータ入力部と、SAR画像生成に用いるパラメータをレンジ方向のサブパッチ画像毎に計算するパラメータ計算部と、上記パラメータ計算部により得られたパラメータに基づきサブパッチ画像毎に画像生成処理の開始及び終了を決定するタイミング制御部と、上記パラメータ計算部によって得られるパラメータ、並びにタイミング制御部によって得られるタイミングに基づき上記データ入力部から継続して入力されるパルスデータをサブパッチ画像毎に画像生成処理を行う信号処理装置と、上記信号処理装置より継続して得られる複数のサブパッチ画像をその位置に応じて表示する画像表示装置とを備えた合成開口レーダ信号処理装置が開示されている。
【0011】
特許文献4には、移動プラットフォームに搭載され、地表や海面のレーダ画像を取得する合成開口レーダにおいて、1系の送信アンテナと2系の受信アンテナとを備え、前記送信アンテナのアジマス方向の送信アンテナビームのビーム幅を前記受信アンテナの受信アンテナビームのビーム幅の2倍となるように設定するとともに、2系の前記受信アンテナの受信アンテナビームのうち、片方の受信アンテナビームは前記移動プラットフォームの進行方向側に向け、もう一方の受信アンテナビームは移動プラットフォームの進行方向とは逆側に向けるように構成する合成開口レーダが開示されている。
【0012】
特許文献5には、アンテナ部と、制御系を含む電気回路部と、SAR画像装置と、コンパクト・ポラリメトリSAR処理装置とを有し、前記アンテナ部が、送受信モジュール毎に送信偏波を水平偏波又は垂直偏波に切替可能であって、水平偏波と垂直偏波の2つの偏波で同時に受信可能な垂直・水平偏波共用フェーズドアレイアンテナであり、前記制御系が、送信時に前記フェーズドアレイアンテナのアンテナ面を電気的に分割して、その一方を水平偏波送信、残りを垂直偏波送信に設定し、受信時に水平偏波と垂直偏波の2偏波同時受信に設定するものであり、前記コンパクト・ポラリメトリSAR処理装置が、前記アンテナ部・前記電気回路部により送受信され前記SAR画像再生装置により各々画像化された複素データである水平偏波受信データと垂直偏波受信データとをターゲットベクトルとして取扱い、フルポラリメトリのターゲットベクトルの共分散行列に相当する演算結果を得ることでコンパクト・ポラリメトリSAR処理を行う合成開口レーダが開示されている。
【先行技術文献】
【特許文献】
【0013】
【特許文献1】特開平6−331737号公報
【特許文献2】特開平8−166447号公報
【特許文献3】特開2004−191052号公報
【特許文献4】特開2008−203228号公報
【特許文献5】特開2009−74918号公報
【非特許文献】
【0014】
【非特許文献1】安藤繁「合成開口レーダと間接計測技術」計測と制御、Vol.22,No.2(昭和58年2月)
【非特許文献2】"SPOTLIGHT-MODE SYNTHETIC APERTURE RADAR: A SIGNAL PROCESSING APPROACH" Charles V. Jakowatz, Jr., Daniel E. Wahl, Dennis C. Ghiglia, Paul A. Thompson Springer, 1996
【発明の概要】
【発明が解決しようとする課題】
【0015】
近年、衛星に搭載された合成開口レーダは、陸域・海域の観測や災害監視に威力を発揮しつつある。しかし、我国の探査衛星“だいち”に搭載された合成開口レーダでは、地球周回軌道からの数10日おきの周期的観測しかできず、また、Lバンド(1.27GHz)マイクロ波を利用し、ストリップマップ法を採用しているため空間分解能は高々5m〜100m程度である。このため、随時緊急対応と高分解能が要求される人命救助・災害監視などに役立たない。
【0016】
また、これまで我国で試験的に開発された航空機搭載SARは、Xバンド(9.55GHz)のマイクロ波を用い、ストリップマップ法を採用しているため、空間分解能は高々1.5mである。このためマイクロ波反射が少ない「人間」のような小さな物体の検出は困難である。
【0017】
上述したように合成開口レーダは、レーダ本体を飛翔体でアジマス方向に移動させながらレーダ計測を繰り返し行い、ドップラー変調された複数の受信信号を処理することにより精細なレーダ画像を出力するものである。ここでレーダ画像において、静止物体のレーダイメージは正確な画像位置に再構成される。ところがレンジ方向に移動している移動体の場合には、ドップラー変調量が変化するため、移動体のレーダイメージはアジマス方向に変位した画像位置に再構成される。変位量はレンジ方向の移動速度に比例する。この時変位した位置に静止物体からのイメージが重なると、双方を見分けることは通常困難である。
【0018】
さらに、合成開口レーダを用いた従来の移動体検出法は、アンテナ間距離を1メートル以上飛行方向に離した2個以上のアンテナを使い、それらのアンテナによる受信信号の位相差を検出することによりクラッターキャンセリングを行っている。小型航空機等には飛行方向に複数のアンテナを設置するスペースを確保することは通常困難である。
【0019】
本発明が解決しようとする課題は、複数のパラボラアンテナを設置する必要がなく、コンパクトなアンテナ系にできるため、小型航空機やヘリコプタ、リモコンで操縦可能な無人飛行機等にも搭載できる移動体検出用のスプリットビーム方式合成開口レーダを提供することを目的とする。
【課題を解決するための手段】
【0020】
前記課題を解決するため、本発明の第1の構成は、飛翔体に搭載され、対象物に向けて照射したマイクロ波の反射波に基づいて対象物のイメージを取得するスポットライトモードの合成開口レーダにおいて、
放射方向が僅かに異なり、ビームのメインローブが互いにオーバーラップしている少なくとも2つのチャープマイクロ波のビームを対象物に向けて同時に照射する少なくとも2つの一次放射器を備えるとともに、前記チャープ波ビームによる前記対象物からの反射波を前記少なくとも2つの一次放射器で各系統独立に受信するスプリットビーム送受信アンテナと、
前記受信した少なくとも2系統の反射波からの画像データの画像強度比に基づき、静止物体の画像を除去して移動体の画像のみを抽出するクラッターキャンセリング手段と、
抽出された前記移動体の画像に基づいて当該移動体の位置・速度同定手段とを備えたスプリットビーム方式合成開口レーダである。
【0021】
ここで「スプリットビーム」とは、一つのパラボラアンテナの焦点から少しずれた位置に少なくとも2つ(2つ以上)の小さい一次放射器を配置することによって得られるマイクロ波ビームである。
「クラッターキャンセリング」とは、「移動体」のみを抽出するために、測定された画像から「静止物体」画像をキャンセルすることである。
【0022】
本発明の第2の構成は、前記クラッターキャンセリング手段であり、第1系統の受信機により得られた画像データの画像強度に第2系統の送受信ゲインを乗じたものと、第2系統の受信機により得られた画像データの画像強度に第1系統の送受信ゲインを乗じたものの差(以下「積差」という)を演算することにより、前記積差が0の時は対象物が静止物体であると判断し、前記積差が0でないときは対象物が移動体であると判断する機能を有しているスプリットビーム方式合成開口レーダである。
【0023】
本発明の第3の構成は、前記移動体位置・速度同定手段であり、第2の構成における前記クラッターキャンセリング手段により、アンテナの送受信ゲインデータベースから前記積差が0になる変位量を求め、前記変位量から移動体の位置と速度を同定する機能を有しているスプリットビーム方式合成開口レーダである。
【0024】
本発明は航空機や船舶等に搭載可能なスプリットビーム方式合成開口レーダであり、少し方向が異なる2つ以上の送信ビーム(スプリットビーム)の物体のからの反射波を2つ以上の1次放射器により受信し、クラッターキャンセリングをし、移動体の位置と速度を検出する。
【発明の効果】
【0025】
本発明の方式を採用すると、飛行方向に複数のパラボラアンテナを設置する必要がなく、コンパクトなアンテナ系にでき、総重量の軽量化を図ることができる。このため小型航空機やヘリコプタ、無人飛行機等にも搭載できる移動体検出可能なSARである。
高空間分解能のSAR画像を取得するために、「ストリップマップモード」でなく「スポットライトモード」を採用している。
これら小型軽量・高分解能・移動体検出等の特長を活かすことにより、小型航空機等による全天候型人命救助・災害監視がはじめて可能となる。
また、ITS(Intelligent Transport Systems:高速道路交通システム)等の全天候交通監視システム等にも応用でき、社会的インフラとしての波及効果は大きい。
【図面の簡単な説明】
【0026】
【図1】ストリップマップモードの合成開口レーダシステムの概要を示す説明図である。
【図2】スポットライトモードの合成開口レーダシステムの概要を示す説明図である。
【図3】本発明の実施の形態において用いるスプリットビーム送受信アンテナを示す正面図である。
【図4】本発明の実施の形態における2つのビームの送受信ゲインの角度分布を示すグラフである。
【図5】本発明の実施の形態における式(1)の各種変数を示す説明図である。
【図6】本発明の実施の形態における合成開口処理後のクラッターと移動体の強度イメージである。
【図7】本発明の実施の形態におけるクラッターキャンセル後の移動体のイメージである。
【発明を実施するための形態】
【0027】
以下、本発明の実施の形態について説明する。
1.スプリットビーム方式合成開口レーダによる移動体検知
本発明に係るスプリットビーム方式合成開口レーダは、後述する2つ(以上)のマイクロ波ビームを送受信するアンテナ等のハードウェアと、信号処理でクラッターキャンセルし、移動体のみの可視化を行うアルゴリズムにより構成されている。クラッターとは静止物体のイメージのことであり、クラッターキャンセルにより移動体のイメージのみ表示できる。クラッターキャンセルのためには、ハードウェア・アルゴリズム共に必要となる。
【0028】
2.スプリットビーム送受信アンテナ
スプリットビーム送受信アンテナを図3に示す。図に示すように、水平方向に隣接した2つの1次放射器11,12から同一のチャープマイクロ波13,14が同時に送信される。双方の送信波はパラボラ反射鏡15を通してターゲット(対象物)に入射される。ターゲットからの反射波をパラボラ反射鏡15を通して2つの1次放射器11,12で独立に受信する。1次放射器11,12の各送受信方向を調整し、2系統の送受信ゲインの角度分布を図4のようにすることが可能である。
図4に示すように、各系統の送受信ゲインb1,b2は2度程度異なる方向を向いていて(スプリット)、かつビームのメインローブがオーバーラップしている。オーバーラップした角度領域で次に述べるクラッターキャンセル処理を行う。
【0029】
3.クラッターキャンセル手法
ある特定の位置に静止物体がある場合を考える。上述したように、各々の送受信ゲインは図4に示すように、一方が角度の増加にともない送受信ゲインが単調に増加し、他方のゲインは単調に減少するように、レーダに照射される領域の送受信ゲインが空間分布を持つよう設計されている。レーダから静止物体方向の各系統の送受信ゲインはアンテナ特性データベース(図4参照)より求まる。各系統より得られる静止物体のレーダ画像強度は、各系統の静止物体方向の送受信ゲインに比例している。そのため、系統1により得られた静止物体の画像強度に系統2の送受信ゲインを乗じたものは、系統2より得られた画像強度に系統1の送受信ゲインを乗じたものに等しい。従ってそれぞれの積の差をとると0になる。ところが移動体の場合はこの積の差は0にならない。これは移動体の画像位置が現実の位置と異なるためである。画像強度は現実の移動体方向の送受信アンテナゲインに比例していて、レーダ画像面における移動体方向の送受信アンテナゲインには比例しない。以上のように1セットの画像強度と送受信ゲインの積の差をプロットすると、静止物体は0になり移動体は有限な値を持つため移動体のみ抽出できる。
【0030】
具体的には次の手法でクラッターキャンセルを行う。
図3の左の送受信系を系統1とし、右を系統2とすると、各系統で得られるレーダ画像強度aiは次式で表せる。
【0031】
【数1】
【0032】
ここで、iは系統の番号に対応し、また式中の変数x,y,θ,ψは図5に示すとおりであり、gi,σm,σs,r,V,vは次のように定義される。
gi(α,β):系統1,2の水平角α、仰角βにおける送受信ゲイン
σm(x,y),σs(x,y):移動体と静止物体のレーダ断面積
r:レンジ
V:飛翔体の速度
v:ターゲットのレンジ方向速度
【0033】
式(1)は、各系統の(x,ycosψ)の位置における画像の信号強度は、(x−vr/Vsinθ,y)にある移動体のイメージと、(x,y)にある静止物体のイメージとの重ね合わせであることを意味する。図5に示すように、移動体のイメージは速度に比例した変位量Δx=(vr/Vsinθ)だけアジマス方向にずれる。
ここで、両チャンネルのレーダ画像データより次の計算を行う。
【0034】
【数2】
ここで、
【0035】
【数3】
【0036】
(2)式において、a1,a2はレーダにより得られる画像強度データであり、g1,g2は図4のb1,b2に示すようにアンテナの設計で決定される送受信ゲインである。v=0のとき(3)式=0となり、静止物体のイメージは(2)式に寄与しないことがわかる。従って、Fをプロットすることにより移動体のイメージのみ観測可能になる。
【0037】
4.レンジ方向の速度同定と、アジマス方向の位置同定
レンジ方向に一定速度で移動する移動体のレーダイメージはアジマス方向に変位するが、移動体の速度と現実の位置は次のように同定される。レーダ画像における移動体の位置に静止物体がない時、あるいは移動体の画像イメージが静止物体の表示領域外まで変位した時、そのイメージは移動体のみによって生成されていることになる。したがって、(1)式を用いてビーム1と2の画像強度の比をとると次式が得られる。
【0038】
【数4】
【0039】
(4)式は移動体の画像強度の比は、移動体の現実の位置における系統1と2の送受信アンテナゲインの比であることを示している。x,V,θ,ψ,rとも既知であるので、移動体の速度vが求まる。例えば、系統1と2の各々で計測された2次元画像aiの座標(x,ycosψ)に点状の像が写っていたとする。ここでa1とa2の画像強度の比をとる。座標(x,ycosψ)に写った像が静止物体によるものの場合、画像強度の比は、系統1および2の送受信ゲインの比と一致する。しかし移動体による像の場合は一致しない。これは移動体の画像位置が現実の位置とは異なるためである。送受信ゲインの分布gはアンテナの特性で決まっている。したがって計算機を用いて系統1と2の送受信ゲインの比が、画像の強度比と一致するようなアジマス方向の変位量Δxを求めることができる。このΔxから移動体の実際の位置が同定される。またアジマス方向の変位量はΔx=vr/Vsinθと表されるので、移動体の速度vは以下の式から算出できる。
【0040】
【数5】
【0041】
5.クラッターキャンセルのシミュレーション実験
クラッターキャンセルのシミュレーションを行った。シミュレーションの条件はレーダ本体から10km離れた位置に速度1m/sの移動体を配置すると共に、周囲に多数の静止物体を配置した。図6に合成開口処理後の画像を示す。
【0042】
図6は縦軸がレンジ方向で、横軸がアジマス方向である。図上に移動体のイメージのみ○印をつけたが、現実のSARでは区別できない。図7は図6の画像データに、上述したクラッターキャンセル処理を行った画像を示している。図6のようにクラッターはすべてキャンセルされ、○で示した移動体のみが表示されている。図7は現実のSAR計測で必ず重畳されるノイズ(NF:4dB)を含む状態でシミュレーションを行った結果であり、中心部から左右外側に行くにしたがいノイズが多くなっている。これは外側ほど、アンテナより照射されるマイクロ波強度が低くなるためである。
【0043】
検出できる最低速度はノイズの大きさで決定される。アンプノイズ・アンテナゲイン・サイドローブ等の熟慮した設計によりノイズを抑えることが可能で、数cm/sで移動する物体の検出が可能である。
なお、高分解能(0.1m)のためには、Kuバンド(12〜18GHz)〜Kaバンド(26〜40GHz)のマイクロ波を用い、またスポットライトモードのSAR画像データ取得方法を用いることが好適である。
【産業上の利用可能性】
【0044】
本発明のスプリットビーム方式合成開口レーダは、複数のパラボラアンテナを設置する必要がなく、コンパクトなアンテナ系にできため、小型航空機やヘリコプタ等にも搭載できるスプリットビーム方式合成開口レーダとして、陸域・海域の観測や災害監視等、人が近づきにくい場所や危険な場所の監視に有用である。また、ITS(Intelligent Transport Systems:高速道路交通システム)等の全天候交通監視システム等にも応用できる。
【符号の説明】
【0045】
1 レーダ本体
2 SAR用アンテナ
3 照射帯
4 通信用アンテナ
5 受信局
6 アンテナ
7 データ処理局
11,12 1次放射器
13,14 チャープマイクロ波
15 パラボラ反射鏡
【特許請求の範囲】
【請求項1】
飛翔体に搭載され、対象物に向けて照射したマイクロ波の反射波に基づいて対象物の画像を取得するスポットライトモードの合成開口レーダにおいて、
放射方向が僅かに異なり、ビームのメインローブが互いにオーバーラップしている少なくとも2つのチャープマイクロ波のビームを対象物に向けて同時に照射する少なくとも2つの一次放射器を備えるとともに、前記少なくとも2つのチャープマイクロ波ビームによる前記対象物からの反射波を前記少なくとも2つの一次放射器で各系統毎に受信するスプリットビーム送信アンテナと、
前記受信した少なくとも2系統の反射波からの画像データの画像強度比に基づき、静止物体のイメージを除去して移動体のイメージのみを抽出するクラッターキャンセリング手段と、
抽出された前記移動体のイメージに基づいて当該移動体の位置と速度を同定する移動体位置・速度同定手段と
を備えたスプリットビーム方式合成開口レーダ。
【請求項2】
前記クラッターキャンセリング手段は、第1系統の受信機により得られた画像データの画像強度に第2系統の送受信ゲインを乗じたものと、第2系統の受信機により得られた画像データの画像強度に第1系統の送受信ゲインを乗じたものの差(以下「積差」という)を演算することにより、前記積差が0の時は対象物が静止物体であると判断し、前記積差が0でないときは対象物が移動体であると判断する機能を有している請求項1記載のスプリットビーム方式合成開口レーダ。
【請求項3】
前記移動体位置・速度同定手段は、前記クラッターキャンセリング手段において演算される積差が0になる変位量を少なくとも2系統のアンテナの送受信ゲインデータベースより求め、その変位量から移動体の位置を同定し、速度に比例する変位量から移動体の速度を同定する機能を有している請求項2記載のスプリットビーム方式合成開口レーダ。
【請求項1】
飛翔体に搭載され、対象物に向けて照射したマイクロ波の反射波に基づいて対象物の画像を取得するスポットライトモードの合成開口レーダにおいて、
放射方向が僅かに異なり、ビームのメインローブが互いにオーバーラップしている少なくとも2つのチャープマイクロ波のビームを対象物に向けて同時に照射する少なくとも2つの一次放射器を備えるとともに、前記少なくとも2つのチャープマイクロ波ビームによる前記対象物からの反射波を前記少なくとも2つの一次放射器で各系統毎に受信するスプリットビーム送信アンテナと、
前記受信した少なくとも2系統の反射波からの画像データの画像強度比に基づき、静止物体のイメージを除去して移動体のイメージのみを抽出するクラッターキャンセリング手段と、
抽出された前記移動体のイメージに基づいて当該移動体の位置と速度を同定する移動体位置・速度同定手段と
を備えたスプリットビーム方式合成開口レーダ。
【請求項2】
前記クラッターキャンセリング手段は、第1系統の受信機により得られた画像データの画像強度に第2系統の送受信ゲインを乗じたものと、第2系統の受信機により得られた画像データの画像強度に第1系統の送受信ゲインを乗じたものの差(以下「積差」という)を演算することにより、前記積差が0の時は対象物が静止物体であると判断し、前記積差が0でないときは対象物が移動体であると判断する機能を有している請求項1記載のスプリットビーム方式合成開口レーダ。
【請求項3】
前記移動体位置・速度同定手段は、前記クラッターキャンセリング手段において演算される積差が0になる変位量を少なくとも2系統のアンテナの送受信ゲインデータベースより求め、その変位量から移動体の位置を同定し、速度に比例する変位量から移動体の速度を同定する機能を有している請求項2記載のスプリットビーム方式合成開口レーダ。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2011−7572(P2011−7572A)
【公開日】平成23年1月13日(2011.1.13)
【国際特許分類】
【出願番号】特願2009−150179(P2009−150179)
【出願日】平成21年6月24日(2009.6.24)
【出願人】(500372717)学校法人福岡工業大学 (32)
【Fターム(参考)】
【公開日】平成23年1月13日(2011.1.13)
【国際特許分類】
【出願日】平成21年6月24日(2009.6.24)
【出願人】(500372717)学校法人福岡工業大学 (32)
【Fターム(参考)】
[ Back to top ]