
スプリングリターン機構付きボイスコイルモータの駆動回路および駆動方法ならびにそれらを用いたレンズモジュールおよび電子機器
【課題】スプリングリターン機構付きVCMの振動を抑制する。
【解決手段】制御部30は、ボイスコイルモータ110の目標ストローク量を指示する指令値を受け、制御信号V2を生成する。制御信号S2は、移動前のストローク量に対応する初期値から目標ストローク量に対応する目標値に向けて、ボイスコイルモータ110の共振周波数の逆数の整数倍の遷移時間にわたり直線的に変化する。駆動電流生成部10は、ボイスコイルモータ110のコイルに、制御信号S2に応じた駆動電流Idrvを供給する。
【解決手段】制御部30は、ボイスコイルモータ110の目標ストローク量を指示する指令値を受け、制御信号V2を生成する。制御信号S2は、移動前のストローク量に対応する初期値から目標ストローク量に対応する目標値に向けて、ボイスコイルモータ110の共振周波数の逆数の整数倍の遷移時間にわたり直線的に変化する。駆動電流生成部10は、ボイスコイルモータ110のコイルに、制御信号S2に応じた駆動電流Idrvを供給する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、スプリングリターン機構付きボイスコイルモータの制御技術に関する。
【背景技術】
【0002】
デジタルスチルカメラ、デジタルビデオカメラあるいは撮像機能付きの電子機器(たとえば携帯電話)には、フォーカシングレンズを位置決めするためのアクチュエータが設けられる。アクチュエータとしてはステッピングモータ方式、ピエゾ方式、ボイスコイルモータ(VCM)方式等が採用される。
【0003】
VCMは、そのコイルに流れる電流の向きに応じた直線方向に推進力を発生させることができる。たとえばVCMにHブリッジ回路を接続した場合、コイル電流の向きを切りかえることができ、正方向と負方向に推進力を得ることができる。
【0004】
これに対して、スプリングリターン機構付きのVCMが利用される場合がある。スプリングリターン機構付きVCMは、第1の方向への推進力をコイルに駆動電流を供給することで発生し、それと反対の第2の方向への推進力を可動子に取り付けられたばね(スプリング)の力を利用して発生させる構造となっている。つまり電気的な駆動と力学的な駆動が併用されている。スプリングリターン機構付きVCMを駆動する場合、そのコイルの一方向にのみ駆動電流を供給すればよく、駆動回路が簡素化できる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2004−12492号公報
【特許文献2】特開平9−298430号公報
【特許文献3】特開2008−113506号公報
【特許文献4】特開2008−043171号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ばねを有する振動系は、ばね定数Kと、質量Mで定まる共振周波数frを有する。
fr=√(K/M)/2π …(1)
電子機器の小型化にともない、スプリングリターン機構付きVCMの小型化が要求されている。VCMが小型化すると、コイルのインダクタンスが小さくなり、また可動子の重量も小さくなることから、スプリングの力によって可動子、つまりレンズが振動するという問題が発生する。
【0007】
レンズの振動を抑制するために、共振周波数frの周波数成分が除去されたスペクトルを有する駆動電流によって、VCMを駆動する方法が提案されている。具体的には、(1)ステップ波形を、共振周波数を除去する帯域除去フィルタBEFによって波形整形し、駆動電流を生成する手法や、(2)波形整形された駆動信号をあらかじめ演算により計算してそれをメモリに格納しておき、駆動時に読み出す、といった手法が提案されている。これらの方法では、フィルタやメモリなどが必要となるため、ハードウェアの規模が大きくなるという問題がある。
【0008】
本発明は係る課題に鑑みてなされたものであり、そのある態様の例示的な目的のひとつは、スプリングリターン機構付きVCMの振動を抑制可能な制御技術の提供にある。
【課題を解決するための手段】
【0009】
本発明のある態様は、スプリングリターン機構付きボイスコイルモータの駆動回路に関する。この駆動回路は、ボイスコイルモータの目標ストローク量(スライド量ともいう)を指示する指令値を受けて制御信号を生成する制御部と、ボイスコイルモータのコイルに、制御信号に応じた駆動電流を供給する駆動電流生成部と、を備える。制御部は、制御信号を、移動前のストローク量に対応する初期値から目標ストローク量に対応する目標値に向けて、ボイスコイルモータの共振周波数の逆数の整数倍の遷移時間にわたり直線的に変化させる。
【0010】
この態様によると、可動子の残留振幅を抑制でき、セトリング時間を短縮できる。
【0011】
遷移時間は、共振周波数の逆数の1倍であってもよい。この場合、セトリング時間を最も短くできる。
【0012】
制御部は、デジタルの制御信号を生成する演算部を含んでもよい。遷移時間をτ、制御信号のサンプリング周期をTs、ストローク量の初期値をx1、目標値をx2とするとき、演算部は、制御信号の値を、(x2−x1)×Ts/τずつ変化させてもよい。
【0013】
本発明の別の態様は、レンズモジュールに関する。レンズモジュールは、フォーカシングレンズと、その可動子がフォーカシングレンズに連結されたリターン機構付きボイスコイルモータと、ボイスコイルモータを駆動する上述のいずれかの態様の駆動回路と、を備える。
【0014】
本発明の別の態様は、レンズモジュールに関する。レンズモジュールは、手ぶれ補正用レンズと、その可動子が手ぶれ補正用レンズに連結されたリターン機構付きボイスコイルモータと、ボイスコイルモータを駆動する上述のいずれかの態様の駆動回路と、を備える。
【0015】
本発明の別の態様は電子機器に関する。電子機器は、上述のいずれかのレンズモジュールと、レンズモジュールを通った光を撮像する撮像デバイスと、を備える。
【発明の効果】
【0016】
本発明によれば、可動子の振動を抑制できる。
【図面の簡単な説明】
【0017】
【図1】実施の形態に係る駆動回路の構成を示す回路図である。
【図2】図1の駆動回路の動作を示す波形図である。
【図3】ストローク量を0から160に変化させるときの、ステップ量と、残留振幅および遷移時間の関係を示す図である。
【図4】変形例に係る制御部の構成を示す回路図である。
【発明を実施するための形態】
【0018】
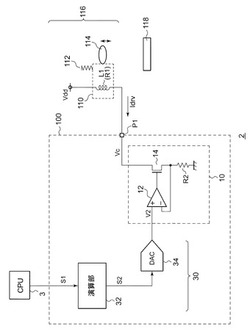
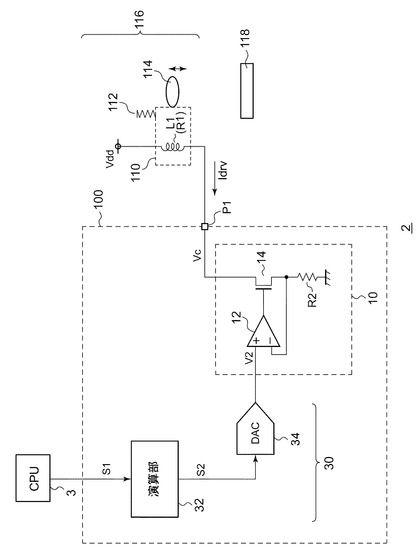
図1は、実施の形態に係る駆動回路100の構成を示す回路図である。図1には、駆動回路100を備える電子機器2全体が示される。
【0019】
電子機器2は、撮像機能付きの携帯電話、あるいはデジタルカメラ、ビデオカメラなどであり、CPU(Central Processing Unit)3、レンズモジュール116および撮像デバイス118を備える。
【0020】
レンズモジュール116は、いわゆるオートフォーカス機能を実現するために設けられ、フォーカシングレンズ114、ボイスコイルモータ110、駆動回路100を含む。
【0021】
ボイスコイルモータ110は、フォーカシングレンズ114を位置決めするアクチュエータであり、その可動子は、フォーカシングレンズ114と連結されている。ボイスコイルモータ110は、リターンスプリング機構を備え、その可動子はスプリング112と連接されている。
【0022】
駆動回路100は、ボイスコイルモータ110のコイルL1に駆動電流Idrvを供給し、レンズ114の位置を制御する。具体的には、駆動回路100はコイルL1に駆動電流Idrvを流すことにより、可動子を第1の方向に変位させる。スプリング112は、可動子を第1の方向と反対の第2の方向に押し戻すように作用する。
【0023】
CPU3は、フォーカシングレンズ114を通過した像が、撮像デバイス118上で結像するように、フォーカシングレンズ114の目標位置を決定し、その目標位置に応じたボイスコイルモータ110のストローク量を指示する指令値S1を駆動回路100に出力する。
【0024】
以上が電子機器2全体の構成である。続いて駆動回路100の構成を説明する。
【0025】
駆動回路100は、駆動端子P1、駆動電流生成部10、制御部30を備える。
【0026】
駆動端子P1は、コイルL1の一端と接続される。コイルL1の他端は、固定電圧端子(たとえば電源端子Vdd)と接続される。駆動回路100が負電源を受けて動作する場合、固定電圧端子は接地端子であってもよい。また図1の駆動回路100はコイルL1から駆動電流を吸い込むシンク型で構成されるが、当業者であれば、コイルL1に駆動電流Idrvを流し込むソース型としても構成できることが理解できよう。ソース型の場合、コイルL1の他端は接地端子と接続される。
【0027】
制御部30は、電子機器2からボイスコイルモータ110の目標ストローク量を指示する指令値S1を受け、アナログの制御信号V2を生成する。ボイスコイルモータ110およびスプリング112、フォーカシングレンズ114からなる振動系は、ばね定数Kと、質量Mで定まる共振周波数frを有する。
fr=√(K/M)/2π …(1)
【0028】
駆動回路100には、共振周波数frもしくはその逆数1/frに対応するデータが予め格納されており、あるいは、そのデータをCPU3から受信可能となっている。制御部30は、制御信号V2を、移動前のストローク量に対応する初期値x1から目標ストローク量に対応する目標値x2に向けて、ある遷移時間τをかけて直線的に変化させる。遷移時間τは、整数nと、共振周波数frの逆数1/frで表される式(2)に従って設定される。
τ=n/fr …(2)
本実施の形態においてn=1である。つまり、遷移時間τは、共振周波数frの逆数に等しい。
【0029】
制御部30は、演算部32およびD/Aコンバータ34を含む。演算部32は、デジタルの制御信号S2を生成する。D/Aコンバータ34は、デジタルの制御信号S2をアナログの制御信号V2に変換する。
制御信号S2のサンプリング周期がTsであるとき、演算部32は、制御信号S2の値を、式(3)のステップ量Δxずつ変化させる。
Δx=(x2−x1)×Ts/τ …(3)
このような演算部32は、カウンタを用いて簡易に生成することができ、具体的な生成アルゴリズムは特に限定されない。
【0030】
駆動電流生成部10は、ボイスコイルモータ110のコイルL1に、制御信号V2に応じた駆動電流Idrvを供給する。たとえば駆動電流生成部10は、演算増幅器12、トランジスタ14、抵抗R2を含む。
【0031】
トランジスタ14および抵抗R2は、駆動端子P1と固定電圧端子(接地端子)の間に、つまりコイルL1に流れる駆動電流Idrvの経路上に直列に設けられる。制御信号V2は、演算増幅器12の非反転入力端子へと入力される。トランジスタ14と抵抗R2の接続点の電圧は、演算増幅器12の反転入力端子にフィードバックされる。駆動電流生成部10により生成される駆動電流Idrvは、以下で与えられる。
Idrv=V2/R2
【0032】
なお駆動電流生成部10の構成は、図1のそれには限定されず、その他の形式の電流源あるいは電圧源を用いてもよい。
【0033】
以上が駆動回路100の全体構成である。続いてその動作の概略を説明する。
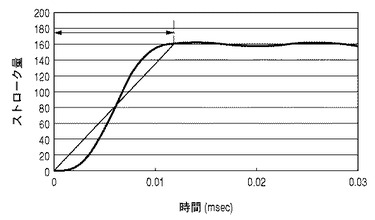
図2は、図1の駆動回路100の動作を示す波形図である。実線(i)は制御信号S2(すなわち駆動電流生成部10が生成する駆動電流Idrv)を、破線(ii)は、その制御信号S2を与えたときの実際のストローク量を示す。
【0034】
共振周波数frが85.333Hzであるとき、遷移時間τは、τ=1/85.333=11.7(msec)に設定される。たとえばストローク量の初期値x1=0であり、CPU3から、目標値x2=160を指示する指令値S1が入力されるとする。制御信号S2のサンプリング時間Ts=0.98ms(サンプリング周波数fs=1024Hz)とすると、ステップ量Δxは式(3)に従い、
Δx=(x2−x1)×Ts/τ
=(160−0)/11.7×0.98=13.4
で与えられる。
【0035】
制御部30は、1サンプリングごとに、制御信号S2の値をΔx=13.4ずつインクリメントしていく。その結果、駆動電流生成部10が生成する駆動電流Idrvは、初期値x1に対応する電流値から、目標値x2に対応する電流値まで、遷移時間τにわたり直線的に変化する。
【0036】
破線(ii)で示すように、遷移時間τの途中では、振動によって制御信号S2と実際のストローク量に誤差δが生ずるが、遷移途中の振動は、実際の用途においては特に問題とならない。そして、遷移時間τ経過後においては、ストローク量は目標値付近に安定化する。遷移時間τ経過後の振動(残留振幅という)は、実際の用途においては、十分に許容される範囲に収まっており、遷移時間τでセトリングしていると考えてよい。すなわち、遷移時間τとセトリング時間は等しくなっている。
【0037】
このように、実施の形態に係る駆動回路100によれば、11.7msと十分に短い遷移時間τで、ストローク量を目標値に安定化させることができる。さまざまなレンズモジュールにおいて、共振周波数frは数十Hz〜百数十Hz程度であるため、仮にfr=30Hzであったとしても、遷移時間τは33ms程度であるから、十分に高速な制御が可能である。
【0038】
また、この駆動回路100では、従来の駆動電流のスペクトルから共振周波数を除去するためのフィルタや、共振周波数が除去された制御信号を格納するメモリが不要となるため、ハードウェア規模を小さくすることができる。
【0039】
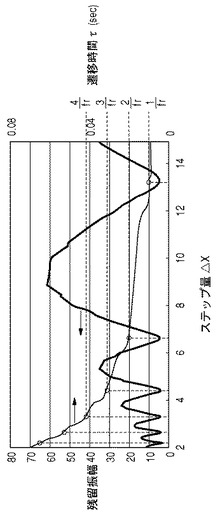
図3は、ストローク量を0から160に変化させるときの、ステップ量Δxと、残留振幅および遷移時間の関係を示す図である。なお、図3の関係を、当業者の一般的な技術常識と捉えてはならず、本発明者らが初めて見いだしたものである。
【0040】
一般的に知られた傾向として、ステップ量Δxを小さくするほど、遷移中の振幅ならびに残留振幅を小さくできる。しかしながら、ステップ量Δxを小さくすれば、遷移時間τが長くなる。反対に、ステップ量Δxを大きくすれば、遷移時間τは短くできるが、残留振幅は大きくなり、結果としてセトリング時間が長くなってしまう。
【0041】
本発明者らはさらに詳細にステップ量Δxと残留振幅の関係について検討し、図3に示すように、ステップ量が離散的なある値をとるときに、残留振幅が小さくなることを見いだした。残留振幅が最小となるステップ量は、共振周波数frの逆数1/frの整数倍となる遷移時間τを与える。言い換えれば、遷移時間τを共振周波数frの逆数1/frの整数倍とすることにより、ステップ量Δxを大きくしても、残留振幅を小さくすることができる。
【0042】
実施の形態では、n=1の場合を説明したが、nは2以上であってもよい。ただし、nを大きくするほど遷移時間(セトリング時間)τは長くなるため、n=1の場合が最も好ましい。
【0043】
以上、本発明について、実施の形態をもとに説明した。この実施の形態は例示であり、それらの各構成要素や各処理プロセスの組み合わせにいろいろな変形例が可能なこと、またそうした変形例も本発明の範囲にあることは当業者に理解されるところである。以下、こうした変形例について説明する。
【0044】
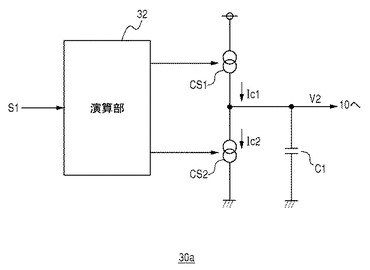
実施の形態では、演算部32およびD/Aコンバータ34を含む制御部30を説明したが、制御信号V2の生成手段はこれには限定されない。図4は、変形例に係る制御部30aの構成を示す回路図である。
【0045】
制御部30は、キャパシタC1、第1電流源CS1、第2電流源CS2、演算部32を備える。第1電流源CS1、第2電流源CS2は、可変電流源であり、指定された電流量を、指定された期間、生成可能に構成される。キャパシタC1が、第1電流源CS1が生成した電流Ic1によって充電されると、アナログの制御信号V2は、一定の傾きで上昇する。キャパシタC1が、第2電流源CS2が生成した電流Ic2によって放電されると、アナログの制御信号V2は、一定の傾きで下降する。
【0046】
演算部32は、アナログの制御信号V2が、移動前のストローク量に対応する初期値x1から目標ストローク量に対応する目標値x2に向けて、共振周波数frの逆数(1/fr)の整数倍の遷移時間τにわたり直線的に変化するように、第1電流源CS1、第2電流源CS2を制御する。遷移時間τは、上述した式(2)で与えられる。
【0047】
ストローク量を増加させる際には、演算部32は、第2電流源CS2を非アクティブとし、第1電流源CS1を遷移時間τの期間、アクティブとする。このとき第1電流源CS1が生成すべき電流Ic1は、式(4)で与えられる。
Ic1=C1×(x2−x1)/τ …(4)
【0048】
ストローク量を減少させる際には、演算部32は、第1電流源CS1を非アクティブとし、第2電流源CS2を遷移時間τの期間、アクティブとする。このとき第2電流源CS2が生成すべき電流Ic2は、式(5)で与えられる。
Ic2=−C1×(x2−x1)/τ …(5)
【0049】
この構成によれば、図1の制御部30およびD/Aコンバータ34のセットと同様に、アナログの制御信号V2を生成することができる。
【0050】
当業者であれば、図1あるいは図4の構成の他にも、制御信号S2あるいはV2を生成する回路を設計することができ、こうした回路も本発明の範囲に含まれる。
【0051】
実施の形態では、フォーカシング用のレンズモジュールを説明したが、駆動回路100の用途はそれには限定されない。たとえばボイスコイルモータ110は、手ぶれ補正用のレンズを駆動してもよい。
【0052】
実施の形態にもとづき、具体的な語句を用いて本発明を説明したが、実施の形態は、本発明の原理、応用を示しているにすぎず、実施の形態には、請求の範囲に規定された本発明の思想を逸脱しない範囲において、多くの変形例や配置の変更が可能である。
【符号の説明】
【0053】
L1…コイル、P1…駆動端子、2…電子機器、10…駆動電流生成部、R2…抵抗、12…演算増幅器、14…トランジスタ、30…制御部、32…演算部、34…D/Aコンバータ、100…駆動回路、110…ボイスコイルモータ、112…スプリング、114…フォーカシングレンズ、116…レンズモジュール、118…撮像デバイス。
【技術分野】
【0001】
本発明は、スプリングリターン機構付きボイスコイルモータの制御技術に関する。
【背景技術】
【0002】
デジタルスチルカメラ、デジタルビデオカメラあるいは撮像機能付きの電子機器(たとえば携帯電話)には、フォーカシングレンズを位置決めするためのアクチュエータが設けられる。アクチュエータとしてはステッピングモータ方式、ピエゾ方式、ボイスコイルモータ(VCM)方式等が採用される。
【0003】
VCMは、そのコイルに流れる電流の向きに応じた直線方向に推進力を発生させることができる。たとえばVCMにHブリッジ回路を接続した場合、コイル電流の向きを切りかえることができ、正方向と負方向に推進力を得ることができる。
【0004】
これに対して、スプリングリターン機構付きのVCMが利用される場合がある。スプリングリターン機構付きVCMは、第1の方向への推進力をコイルに駆動電流を供給することで発生し、それと反対の第2の方向への推進力を可動子に取り付けられたばね(スプリング)の力を利用して発生させる構造となっている。つまり電気的な駆動と力学的な駆動が併用されている。スプリングリターン機構付きVCMを駆動する場合、そのコイルの一方向にのみ駆動電流を供給すればよく、駆動回路が簡素化できる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2004−12492号公報
【特許文献2】特開平9−298430号公報
【特許文献3】特開2008−113506号公報
【特許文献4】特開2008−043171号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ばねを有する振動系は、ばね定数Kと、質量Mで定まる共振周波数frを有する。
fr=√(K/M)/2π …(1)
電子機器の小型化にともない、スプリングリターン機構付きVCMの小型化が要求されている。VCMが小型化すると、コイルのインダクタンスが小さくなり、また可動子の重量も小さくなることから、スプリングの力によって可動子、つまりレンズが振動するという問題が発生する。
【0007】
レンズの振動を抑制するために、共振周波数frの周波数成分が除去されたスペクトルを有する駆動電流によって、VCMを駆動する方法が提案されている。具体的には、(1)ステップ波形を、共振周波数を除去する帯域除去フィルタBEFによって波形整形し、駆動電流を生成する手法や、(2)波形整形された駆動信号をあらかじめ演算により計算してそれをメモリに格納しておき、駆動時に読み出す、といった手法が提案されている。これらの方法では、フィルタやメモリなどが必要となるため、ハードウェアの規模が大きくなるという問題がある。
【0008】
本発明は係る課題に鑑みてなされたものであり、そのある態様の例示的な目的のひとつは、スプリングリターン機構付きVCMの振動を抑制可能な制御技術の提供にある。
【課題を解決するための手段】
【0009】
本発明のある態様は、スプリングリターン機構付きボイスコイルモータの駆動回路に関する。この駆動回路は、ボイスコイルモータの目標ストローク量(スライド量ともいう)を指示する指令値を受けて制御信号を生成する制御部と、ボイスコイルモータのコイルに、制御信号に応じた駆動電流を供給する駆動電流生成部と、を備える。制御部は、制御信号を、移動前のストローク量に対応する初期値から目標ストローク量に対応する目標値に向けて、ボイスコイルモータの共振周波数の逆数の整数倍の遷移時間にわたり直線的に変化させる。
【0010】
この態様によると、可動子の残留振幅を抑制でき、セトリング時間を短縮できる。
【0011】
遷移時間は、共振周波数の逆数の1倍であってもよい。この場合、セトリング時間を最も短くできる。
【0012】
制御部は、デジタルの制御信号を生成する演算部を含んでもよい。遷移時間をτ、制御信号のサンプリング周期をTs、ストローク量の初期値をx1、目標値をx2とするとき、演算部は、制御信号の値を、(x2−x1)×Ts/τずつ変化させてもよい。
【0013】
本発明の別の態様は、レンズモジュールに関する。レンズモジュールは、フォーカシングレンズと、その可動子がフォーカシングレンズに連結されたリターン機構付きボイスコイルモータと、ボイスコイルモータを駆動する上述のいずれかの態様の駆動回路と、を備える。
【0014】
本発明の別の態様は、レンズモジュールに関する。レンズモジュールは、手ぶれ補正用レンズと、その可動子が手ぶれ補正用レンズに連結されたリターン機構付きボイスコイルモータと、ボイスコイルモータを駆動する上述のいずれかの態様の駆動回路と、を備える。
【0015】
本発明の別の態様は電子機器に関する。電子機器は、上述のいずれかのレンズモジュールと、レンズモジュールを通った光を撮像する撮像デバイスと、を備える。
【発明の効果】
【0016】
本発明によれば、可動子の振動を抑制できる。
【図面の簡単な説明】
【0017】
【図1】実施の形態に係る駆動回路の構成を示す回路図である。
【図2】図1の駆動回路の動作を示す波形図である。
【図3】ストローク量を0から160に変化させるときの、ステップ量と、残留振幅および遷移時間の関係を示す図である。
【図4】変形例に係る制御部の構成を示す回路図である。
【発明を実施するための形態】
【0018】
図1は、実施の形態に係る駆動回路100の構成を示す回路図である。図1には、駆動回路100を備える電子機器2全体が示される。
【0019】
電子機器2は、撮像機能付きの携帯電話、あるいはデジタルカメラ、ビデオカメラなどであり、CPU(Central Processing Unit)3、レンズモジュール116および撮像デバイス118を備える。
【0020】
レンズモジュール116は、いわゆるオートフォーカス機能を実現するために設けられ、フォーカシングレンズ114、ボイスコイルモータ110、駆動回路100を含む。
【0021】
ボイスコイルモータ110は、フォーカシングレンズ114を位置決めするアクチュエータであり、その可動子は、フォーカシングレンズ114と連結されている。ボイスコイルモータ110は、リターンスプリング機構を備え、その可動子はスプリング112と連接されている。
【0022】
駆動回路100は、ボイスコイルモータ110のコイルL1に駆動電流Idrvを供給し、レンズ114の位置を制御する。具体的には、駆動回路100はコイルL1に駆動電流Idrvを流すことにより、可動子を第1の方向に変位させる。スプリング112は、可動子を第1の方向と反対の第2の方向に押し戻すように作用する。
【0023】
CPU3は、フォーカシングレンズ114を通過した像が、撮像デバイス118上で結像するように、フォーカシングレンズ114の目標位置を決定し、その目標位置に応じたボイスコイルモータ110のストローク量を指示する指令値S1を駆動回路100に出力する。
【0024】
以上が電子機器2全体の構成である。続いて駆動回路100の構成を説明する。
【0025】
駆動回路100は、駆動端子P1、駆動電流生成部10、制御部30を備える。
【0026】
駆動端子P1は、コイルL1の一端と接続される。コイルL1の他端は、固定電圧端子(たとえば電源端子Vdd)と接続される。駆動回路100が負電源を受けて動作する場合、固定電圧端子は接地端子であってもよい。また図1の駆動回路100はコイルL1から駆動電流を吸い込むシンク型で構成されるが、当業者であれば、コイルL1に駆動電流Idrvを流し込むソース型としても構成できることが理解できよう。ソース型の場合、コイルL1の他端は接地端子と接続される。
【0027】
制御部30は、電子機器2からボイスコイルモータ110の目標ストローク量を指示する指令値S1を受け、アナログの制御信号V2を生成する。ボイスコイルモータ110およびスプリング112、フォーカシングレンズ114からなる振動系は、ばね定数Kと、質量Mで定まる共振周波数frを有する。
fr=√(K/M)/2π …(1)
【0028】
駆動回路100には、共振周波数frもしくはその逆数1/frに対応するデータが予め格納されており、あるいは、そのデータをCPU3から受信可能となっている。制御部30は、制御信号V2を、移動前のストローク量に対応する初期値x1から目標ストローク量に対応する目標値x2に向けて、ある遷移時間τをかけて直線的に変化させる。遷移時間τは、整数nと、共振周波数frの逆数1/frで表される式(2)に従って設定される。
τ=n/fr …(2)
本実施の形態においてn=1である。つまり、遷移時間τは、共振周波数frの逆数に等しい。
【0029】
制御部30は、演算部32およびD/Aコンバータ34を含む。演算部32は、デジタルの制御信号S2を生成する。D/Aコンバータ34は、デジタルの制御信号S2をアナログの制御信号V2に変換する。
制御信号S2のサンプリング周期がTsであるとき、演算部32は、制御信号S2の値を、式(3)のステップ量Δxずつ変化させる。
Δx=(x2−x1)×Ts/τ …(3)
このような演算部32は、カウンタを用いて簡易に生成することができ、具体的な生成アルゴリズムは特に限定されない。
【0030】
駆動電流生成部10は、ボイスコイルモータ110のコイルL1に、制御信号V2に応じた駆動電流Idrvを供給する。たとえば駆動電流生成部10は、演算増幅器12、トランジスタ14、抵抗R2を含む。
【0031】
トランジスタ14および抵抗R2は、駆動端子P1と固定電圧端子(接地端子)の間に、つまりコイルL1に流れる駆動電流Idrvの経路上に直列に設けられる。制御信号V2は、演算増幅器12の非反転入力端子へと入力される。トランジスタ14と抵抗R2の接続点の電圧は、演算増幅器12の反転入力端子にフィードバックされる。駆動電流生成部10により生成される駆動電流Idrvは、以下で与えられる。
Idrv=V2/R2
【0032】
なお駆動電流生成部10の構成は、図1のそれには限定されず、その他の形式の電流源あるいは電圧源を用いてもよい。
【0033】
以上が駆動回路100の全体構成である。続いてその動作の概略を説明する。
図2は、図1の駆動回路100の動作を示す波形図である。実線(i)は制御信号S2(すなわち駆動電流生成部10が生成する駆動電流Idrv)を、破線(ii)は、その制御信号S2を与えたときの実際のストローク量を示す。
【0034】
共振周波数frが85.333Hzであるとき、遷移時間τは、τ=1/85.333=11.7(msec)に設定される。たとえばストローク量の初期値x1=0であり、CPU3から、目標値x2=160を指示する指令値S1が入力されるとする。制御信号S2のサンプリング時間Ts=0.98ms(サンプリング周波数fs=1024Hz)とすると、ステップ量Δxは式(3)に従い、
Δx=(x2−x1)×Ts/τ
=(160−0)/11.7×0.98=13.4
で与えられる。
【0035】
制御部30は、1サンプリングごとに、制御信号S2の値をΔx=13.4ずつインクリメントしていく。その結果、駆動電流生成部10が生成する駆動電流Idrvは、初期値x1に対応する電流値から、目標値x2に対応する電流値まで、遷移時間τにわたり直線的に変化する。
【0036】
破線(ii)で示すように、遷移時間τの途中では、振動によって制御信号S2と実際のストローク量に誤差δが生ずるが、遷移途中の振動は、実際の用途においては特に問題とならない。そして、遷移時間τ経過後においては、ストローク量は目標値付近に安定化する。遷移時間τ経過後の振動(残留振幅という)は、実際の用途においては、十分に許容される範囲に収まっており、遷移時間τでセトリングしていると考えてよい。すなわち、遷移時間τとセトリング時間は等しくなっている。
【0037】
このように、実施の形態に係る駆動回路100によれば、11.7msと十分に短い遷移時間τで、ストローク量を目標値に安定化させることができる。さまざまなレンズモジュールにおいて、共振周波数frは数十Hz〜百数十Hz程度であるため、仮にfr=30Hzであったとしても、遷移時間τは33ms程度であるから、十分に高速な制御が可能である。
【0038】
また、この駆動回路100では、従来の駆動電流のスペクトルから共振周波数を除去するためのフィルタや、共振周波数が除去された制御信号を格納するメモリが不要となるため、ハードウェア規模を小さくすることができる。
【0039】
図3は、ストローク量を0から160に変化させるときの、ステップ量Δxと、残留振幅および遷移時間の関係を示す図である。なお、図3の関係を、当業者の一般的な技術常識と捉えてはならず、本発明者らが初めて見いだしたものである。
【0040】
一般的に知られた傾向として、ステップ量Δxを小さくするほど、遷移中の振幅ならびに残留振幅を小さくできる。しかしながら、ステップ量Δxを小さくすれば、遷移時間τが長くなる。反対に、ステップ量Δxを大きくすれば、遷移時間τは短くできるが、残留振幅は大きくなり、結果としてセトリング時間が長くなってしまう。
【0041】
本発明者らはさらに詳細にステップ量Δxと残留振幅の関係について検討し、図3に示すように、ステップ量が離散的なある値をとるときに、残留振幅が小さくなることを見いだした。残留振幅が最小となるステップ量は、共振周波数frの逆数1/frの整数倍となる遷移時間τを与える。言い換えれば、遷移時間τを共振周波数frの逆数1/frの整数倍とすることにより、ステップ量Δxを大きくしても、残留振幅を小さくすることができる。
【0042】
実施の形態では、n=1の場合を説明したが、nは2以上であってもよい。ただし、nを大きくするほど遷移時間(セトリング時間)τは長くなるため、n=1の場合が最も好ましい。
【0043】
以上、本発明について、実施の形態をもとに説明した。この実施の形態は例示であり、それらの各構成要素や各処理プロセスの組み合わせにいろいろな変形例が可能なこと、またそうした変形例も本発明の範囲にあることは当業者に理解されるところである。以下、こうした変形例について説明する。
【0044】
実施の形態では、演算部32およびD/Aコンバータ34を含む制御部30を説明したが、制御信号V2の生成手段はこれには限定されない。図4は、変形例に係る制御部30aの構成を示す回路図である。
【0045】
制御部30は、キャパシタC1、第1電流源CS1、第2電流源CS2、演算部32を備える。第1電流源CS1、第2電流源CS2は、可変電流源であり、指定された電流量を、指定された期間、生成可能に構成される。キャパシタC1が、第1電流源CS1が生成した電流Ic1によって充電されると、アナログの制御信号V2は、一定の傾きで上昇する。キャパシタC1が、第2電流源CS2が生成した電流Ic2によって放電されると、アナログの制御信号V2は、一定の傾きで下降する。
【0046】
演算部32は、アナログの制御信号V2が、移動前のストローク量に対応する初期値x1から目標ストローク量に対応する目標値x2に向けて、共振周波数frの逆数(1/fr)の整数倍の遷移時間τにわたり直線的に変化するように、第1電流源CS1、第2電流源CS2を制御する。遷移時間τは、上述した式(2)で与えられる。
【0047】
ストローク量を増加させる際には、演算部32は、第2電流源CS2を非アクティブとし、第1電流源CS1を遷移時間τの期間、アクティブとする。このとき第1電流源CS1が生成すべき電流Ic1は、式(4)で与えられる。
Ic1=C1×(x2−x1)/τ …(4)
【0048】
ストローク量を減少させる際には、演算部32は、第1電流源CS1を非アクティブとし、第2電流源CS2を遷移時間τの期間、アクティブとする。このとき第2電流源CS2が生成すべき電流Ic2は、式(5)で与えられる。
Ic2=−C1×(x2−x1)/τ …(5)
【0049】
この構成によれば、図1の制御部30およびD/Aコンバータ34のセットと同様に、アナログの制御信号V2を生成することができる。
【0050】
当業者であれば、図1あるいは図4の構成の他にも、制御信号S2あるいはV2を生成する回路を設計することができ、こうした回路も本発明の範囲に含まれる。
【0051】
実施の形態では、フォーカシング用のレンズモジュールを説明したが、駆動回路100の用途はそれには限定されない。たとえばボイスコイルモータ110は、手ぶれ補正用のレンズを駆動してもよい。
【0052】
実施の形態にもとづき、具体的な語句を用いて本発明を説明したが、実施の形態は、本発明の原理、応用を示しているにすぎず、実施の形態には、請求の範囲に規定された本発明の思想を逸脱しない範囲において、多くの変形例や配置の変更が可能である。
【符号の説明】
【0053】
L1…コイル、P1…駆動端子、2…電子機器、10…駆動電流生成部、R2…抵抗、12…演算増幅器、14…トランジスタ、30…制御部、32…演算部、34…D/Aコンバータ、100…駆動回路、110…ボイスコイルモータ、112…スプリング、114…フォーカシングレンズ、116…レンズモジュール、118…撮像デバイス。
【特許請求の範囲】
【請求項1】
スプリングリターン機構付きボイスコイルモータの駆動回路であって、
前記ボイスコイルモータの目標ストローク量を指示する指令値を受け、制御信号を生成する制御部であって、前記制御信号は、移動前のストローク量に対応する初期値から前記目標ストローク量に対応する目標値に向けて、前記ボイスコイルモータの共振周波数の逆数の整数倍の遷移時間にわたり直線的に変化する制御部と、
前記ボイスコイルモータのコイルに、前記制御信号に応じた駆動電流を供給する駆動電流生成部と、
を備えることを特徴とする駆動回路。
【請求項2】
前記遷移時間は、前記共振周波数の逆数の1倍であることを特徴とする請求項1に記載の駆動回路。
【請求項3】
前記制御部は、デジタルの制御信号を生成する演算部を含み、
前記遷移時間をτ、前記制御信号のサンプリング周期をTs、前記ストローク量の初期値をx1、目標値をx2とするとき、前記演算部は、前記制御信号の値を、(x2−x1)×Ts/τずつ変化させることを特徴とする請求項2に記載の駆動回路。
【請求項4】
前記制御部は、
キャパシタと、
前記キャパシタを充電する第1電流源と、
前記キャパシタを放電する第2電流源と、
前記第1電流源および前記第2電流源を制御する演算部と、
を備え、
前記キャパシタに生ずる電圧を、前記制御信号として出力し、
前記演算部は、前記制御信号を増大させるとき、前記第1電流源を前記遷移時間の間アクティブとし、前記制御信号を減少させるとき、前記第2電流源を前記遷移時間の間アクティブとすることを特徴とする請求項1または2に記載の駆動回路。
【請求項5】
フォーカシングレンズと、
その可動子が前記フォーカシングレンズに連結されたリターン機構付きボイスコイルモータと、
前記ボイスコイルモータを駆動する請求項1から3のいずれかに記載の駆動回路と、
を備えることを特徴とするレンズモジュール。
【請求項6】
手ぶれ補正用レンズと、
その可動子が前記手ぶれ補正用レンズに連結されたリターン機構付きボイスコイルモータと、
前記ボイスコイルモータを駆動する請求項1から3のいずれかに記載の駆動回路と、
を備えることを特徴とするレンズモジュール。
【請求項7】
請求項5または6に記載のレンズモジュールと、
前記レンズモジュールを通った光を撮像する撮像デバイスと、
を備えることを特徴とする電子機器。
【請求項8】
スプリングリターン機構付きボイスコイルモータの駆動方法であって、
前記ボイスコイルモータの目標ストローク量を指示する指令値を生成するステップと、
前記ボイスコイルモータの共振周波数の逆数の整数倍の遷移時間にわたり、移動前のストローク量に対応する初期値から前記目標ストローク量に対応する最終値に向けて直線的に変化する制御信号を生成するステップと、
前記ボイスコイルモータのコイルに、前記制御信号に応じた駆動電流を供給するステップと、
を備えることを特徴とする方法。
【請求項1】
スプリングリターン機構付きボイスコイルモータの駆動回路であって、
前記ボイスコイルモータの目標ストローク量を指示する指令値を受け、制御信号を生成する制御部であって、前記制御信号は、移動前のストローク量に対応する初期値から前記目標ストローク量に対応する目標値に向けて、前記ボイスコイルモータの共振周波数の逆数の整数倍の遷移時間にわたり直線的に変化する制御部と、
前記ボイスコイルモータのコイルに、前記制御信号に応じた駆動電流を供給する駆動電流生成部と、
を備えることを特徴とする駆動回路。
【請求項2】
前記遷移時間は、前記共振周波数の逆数の1倍であることを特徴とする請求項1に記載の駆動回路。
【請求項3】
前記制御部は、デジタルの制御信号を生成する演算部を含み、
前記遷移時間をτ、前記制御信号のサンプリング周期をTs、前記ストローク量の初期値をx1、目標値をx2とするとき、前記演算部は、前記制御信号の値を、(x2−x1)×Ts/τずつ変化させることを特徴とする請求項2に記載の駆動回路。
【請求項4】
前記制御部は、
キャパシタと、
前記キャパシタを充電する第1電流源と、
前記キャパシタを放電する第2電流源と、
前記第1電流源および前記第2電流源を制御する演算部と、
を備え、
前記キャパシタに生ずる電圧を、前記制御信号として出力し、
前記演算部は、前記制御信号を増大させるとき、前記第1電流源を前記遷移時間の間アクティブとし、前記制御信号を減少させるとき、前記第2電流源を前記遷移時間の間アクティブとすることを特徴とする請求項1または2に記載の駆動回路。
【請求項5】
フォーカシングレンズと、
その可動子が前記フォーカシングレンズに連結されたリターン機構付きボイスコイルモータと、
前記ボイスコイルモータを駆動する請求項1から3のいずれかに記載の駆動回路と、
を備えることを特徴とするレンズモジュール。
【請求項6】
手ぶれ補正用レンズと、
その可動子が前記手ぶれ補正用レンズに連結されたリターン機構付きボイスコイルモータと、
前記ボイスコイルモータを駆動する請求項1から3のいずれかに記載の駆動回路と、
を備えることを特徴とするレンズモジュール。
【請求項7】
請求項5または6に記載のレンズモジュールと、
前記レンズモジュールを通った光を撮像する撮像デバイスと、
を備えることを特徴とする電子機器。
【請求項8】
スプリングリターン機構付きボイスコイルモータの駆動方法であって、
前記ボイスコイルモータの目標ストローク量を指示する指令値を生成するステップと、
前記ボイスコイルモータの共振周波数の逆数の整数倍の遷移時間にわたり、移動前のストローク量に対応する初期値から前記目標ストローク量に対応する最終値に向けて直線的に変化する制御信号を生成するステップと、
前記ボイスコイルモータのコイルに、前記制御信号に応じた駆動電流を供給するステップと、
を備えることを特徴とする方法。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−81294(P2013−81294A)
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願番号】特願2011−219517(P2011−219517)
【出願日】平成23年10月3日(2011.10.3)
【出願人】(000116024)ローム株式会社 (3,539)
【Fターム(参考)】
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願日】平成23年10月3日(2011.10.3)
【出願人】(000116024)ローム株式会社 (3,539)
【Fターム(参考)】
[ Back to top ]