
スポットランプユニット、このスポットランプユニットが備えられたヘッドライトシステム、およびこれを利用した前方照明方法
【課題】前方の広い範囲を照明するヘッドランプの他に、歩行者や野生動物の出現時に歩行者や野生動物を認識して追加的に集中照明できるスポットランプユニット、このスポットランプユニットが備えられたヘッドライトシステム、およびこれを利用した前方照明方法を提供する。
【解決手段】本発明のスポットランプユニットは、車のヘッドライト内部または車の前端に装着され、前方の照明領域を分割してそれぞれ照明する複数のLEDが設置されたLEDランプと、LEDランプから発生した熱を外部に放熱させるためにLEDランプの後面に設置されるヒートシンクと、LEDランプの前方に備えられ、LEDランプで発光した光を拡散または集光させるレンズとを含み、LEDランプとレンズの間の距離は可変であることを特徴とする。
【解決手段】本発明のスポットランプユニットは、車のヘッドライト内部または車の前端に装着され、前方の照明領域を分割してそれぞれ照明する複数のLEDが設置されたLEDランプと、LEDランプから発生した熱を外部に放熱させるためにLEDランプの後面に設置されるヒートシンクと、LEDランプの前方に備えられ、LEDランプで発光した光を拡散または集光させるレンズとを含み、LEDランプとレンズの間の距離は可変であることを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、スポットランプユニット、このスポットランプユニットが備えられたヘッドライトシステム、およびこれを利用した前方照明方法に係り、より詳しくは、夜間走行時に歩行者を認識し、ヘッドライトを通じて前方照明と共にスポットランプユニットを利用して歩行者がいる領域に追加的にスポット照明することができるスポットランプユニット、このスポットランプユニットが備えられたヘッドライトシステム、およびこれを利用した前方照明方法に関する。
【背景技術】
【0002】
車の前方には、夜間時に前方の視野を確保するための手段として複数のヘッドランプからなるヘッドライトが備えられており、主に夜間走行時、トンネル走行時、または雨天時に、手動または自動で点灯して運転手の前方視野を確保する。
しかし、現在の車のヘッドライトは、単に前方の広い範囲をヘッドライトで照らす方式であるため、十分な明るさで前方を照明することができず、十分に視野を確保することができないという問題点がある。
特に夜間に歩行者や野生動物を発見することができず、事故に繋がるケースが多くあった。すなわち、従来のヘッドライトは、広い前方領域を漫然と照らすため、前方の歩行者または野生動物を適切に把握することができず、歩行者事故またはロードキルに繋がるという問題がある。
【0003】
一方、これを解決するために、車の前方に赤外線カメラを備え、車の計器盤または別途に備えられたモニタを利用して前方を注視する技術も開発されている。しかし、この技術は、車の前方に備えられた赤外線カメラで車の前方を撮影した後、これを別途のモニタを通じて確認するため、運転手は前方注視と共にモニタも注視しなければならず、前方注視力を悪化させる問題点がある。
下記の特許文献1〜4には、上述した、前方を赤外線撮影してモニタにディスプレイするために、ヘッドライトの光源を利用して選択的に赤外線の照射が可能な赤外線投光器を含むナイトビジョン装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】KR10−2005−0078507A
【特許文献2】特開2004−364112号公報
【特許文献3】特開2005−184523号公報
【特許文献4】特開2010−123046号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は上記の問題を解決するためになされたものであって、その目的とするところは、前方の広い範囲を照明するヘッドランプの他に、歩行者や野生動物の出現時に歩行者や野生動物を認識して追加的に集中照明できるスポットランプユニットを提供することにある。
また、他の目的とするところは、上記スポットランプユニットが備えられたヘッドライトシステムを提供することにある。
さらに、他の目的とするところは、上記スポットランプユニットが備えられたヘッドライトシステムを利用した前方照明方法を提供することにある。
【課題を解決するための手段】
【0006】
上記目的を達成するためになされた本発明のスポットランプユニットは、車のヘッドライト内部または車の前端に装着され、前方の照明領域を分割してそれぞれ照明する複数のLEDが設置されたLEDランプと、LEDランプから発生した熱を外部に放熱させるためにLEDランプの後面に設置されるヒートシンクと、LEDランプの前方に備えられ、LEDランプで発光した光を拡散または集光させるレンズと、を含むことを特徴とする。
【0007】
本発明のスポットランプユニットは、LEDランプとレンズの間の距離は可変であり、先端が前進と後進が可能なアクチュエータと、アクチュエータの先端に固定され、LEDランプとヒートシンクが搭載されるランプホルダとをさらに備え、アクチュエータがLEDランプを前進または後進させてLEDランプとレンズの距離を変化させることにより、LEDランプから発光した光を集中して照明することを特徴とする。
スポットランプユニットのレンズは非球面レンズであることを特徴とする。
【0008】
本発明の一側面に他のスポットランプユニットが備えられたヘッドライトシステムは、車の前方に赤外線を放射する赤外線放射器と、赤外線放射器から放射された赤外線のうちで照明対象物から反射された赤外線を撮影するカメラと、カメラで撮影した映像から照明対象物を読み取って照明対象物の危険性の有無を判定する映像処理部と、車前方の照明領域を分割してそれぞれ照明する複数のLEDが装着されたLEDランプとを含むスポットランプユニットと、映像処理部で照明対象物が危険であると判定されれば、照明対象物が位置した領域を照明するLEDランプのLEDが点灯するようにスポットランプユニットを駆動させるランプ駆動部と、を含むことを特徴とする。
【0009】
一方、スポット照明が可能なヘッドライトを利用した前方照明方法は、ヘッドライトを点灯させるヘッドライト点灯段階と、車に備えられた赤外線放射器から車進行方向に赤外線を放射し、照明対象物から反射した赤外線を受光して映像イメージとして格納する映像取得段階と、映像取得段階で格納した映像から照明対象物を認識するための照明対象物検出段階と、照明対象物検出段階で照明対象物が検出されれば、検出された照明対象物の危険性の有無を判断する照明対象物危険判断段階と、照明対象物危険判断段階で照明対象物が危険であると判断されれば、スポットランプを点灯させて照明対象物を照明するスポットランプ駆動段階と、を含むことを特徴とする。
【0010】
ここで、スポットランプ駆動段階が実行された後には、ヘッドライトが消灯したかを確認するヘッドライト消灯判断段階をさらに含むことを特徴とする。
さらに、ヘッドライト消灯判断段階でヘッドライトが消灯していないと判断されれば、映像取得段階にリターンすることを特徴とする。
また、照明対象物危険判断段階で照明対象物が危険でないと判断されれば、ヘッドライト消灯判断段階が実行されることを特徴とする。
【発明の効果】
【0011】
本発明に係るスポットランプユニット、このスポットランプユニットが備えられたヘッドライトシステム、およびこれを利用した前方照明方法によれば、前方を広く照明するヘッドランプの他に、夜間に歩行者または野生動物を認識し、歩行者や野生動物を照らすスポットランプユニットを利用して歩行者や野生動物を集中照明することにより、運転手が視覚を通じて歩行者または野生動物を認識することによって夜間走行の安全性を向上させることができる。
また、スポットランプユニットは、焦点距離を変化させ、昼間には昼間点灯として使用することによって走行の安全性を向上させることができ、夜間の通常走行時にはハイビームなどを補助して前方を照明することができるため、車両走行の安全性を向上させることができる。
【図面の簡単な説明】
【0012】
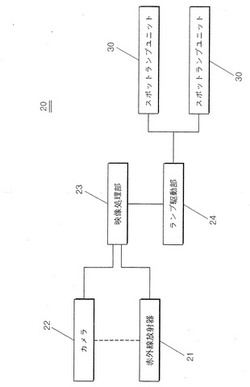
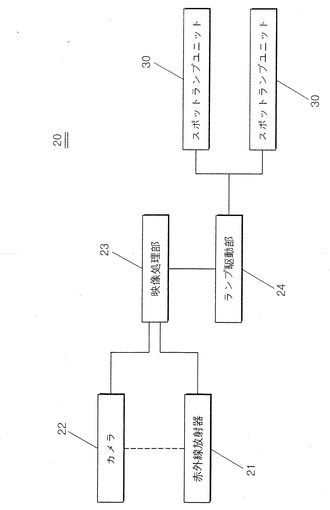
【図1】本発明に係るスポットランプユニットが備えられたヘッドライトシステムを示すブロック図である。
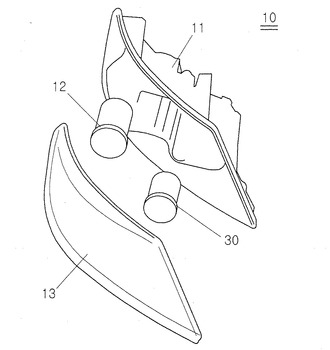
【図2】本発明に係るスポットランプユニットが備えられたヘッドライトの分解斜視図である。
【図3】本発明に係るスポットランプユニットのLEDランプを示す図であり、(a)はLEDランプが設置されたプリント基板を示す斜視図であり、(b)はLEDランプが点灯している状態を撮影した写真である。
【図4】本発明に係るスポットランプユニットを利用してスポット照明時のスポットランプユニットの断面図である。
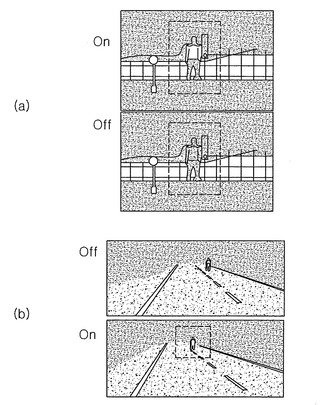
【図5】本発明に係るスポットランプユニットが備えられたヘッドライトシステムを利用して前方を照明した状態を撮影した写真であって、(a)は本発明に係るスポットランプユニットが備えられたヘッドライトシステムをテストして前方の事物を照らした状態を撮影した写真であり、(b)は本発明に係るスポットランプユニットが備えられたヘッドライトシステムを利用して夜間の道路走行時に歩行者をスポット照明した状態を示す写真である。
【図6】本発明に係るスポットランプユニットを利用して昼間点灯として使用する時のスポットランプユニットの断面図である。
【図7】本発明に係るスポットランプユニットを利用してハイビーム補助照明として使用する時のスポットランプユニットの断面図である。
【図8】本発明に係るスポットランプユニットが備えられたヘッドライトシステムを利用した前方照明方法を示すフローチャートである。
【発明を実施するための形態】
【0013】
以下、添付の図面に基づき、本発明に係るスポットランプユニット、このスポットランプユニットが備えられたヘッドライトシステム、およびこれを利用した前方照明方法について説明する。
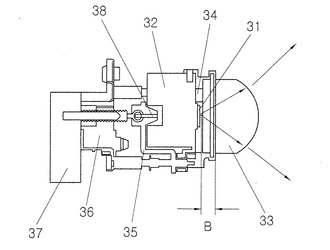
先ず、図4に基づき、本発明に係るスポットランプユニットについて,詳細に説明する。
本発明に係るスポットランプユニット30は、電力が印加されれば発光するLEDランプ31と、LEDランプ31を冷却させるヒートシンク32と、LEDランプ31の前方に備えられLEDランプ31から発光した光の照射方向を調節するレンズ33とを含み、車のヘッドライト10内部に組み込まれて設置されるか、またはヘッドライト10とは別途に車の前方に設置される。
【0014】
LEDランプ31は、LEDが設置されたプリント基板(PCB)にチップセットの形態で備えられ、車前方を分割する領域の数によってLEDがその数だけ設置される。例えば、車の前方左側及び右側をそれぞれ4つの領域に分割し、そのうちの1つの領域を選択してスポット照明すれば、図3(a)および(b)に示したとおり、LEDランプ31内のLEDは4の倍数で備えられる。例えば、図3(a)のLEDランプ31が丸1〜丸4のLEDからなれば、図3(b)に丸1〜丸4で示したとおり、4つのLEDのうちから該当する領域を照射するLEDを選択して発光させることによってスポット照明が可能となる。
ヒートシンク32は、LEDランプ31の後面に付着し、LEDランプ31の点灯によって発生した熱を放熱する。LEDランプ31の後面にLEDランプ31の照射方向と反対方向に突出した放熱ピンが形成されており、LEDランプ31の点灯によって発生する熱を放熱する。
LEDランプ31とヒートシンク32は、車のヘッドライト10のハウジング11とカバー13の間の内部空間にランプブラケット36に固定された状態で設置される。
【0015】
レンズ33は、LEDランプ31の前方に位置し、LEDランプ31から発光した光の照射範囲を調節する。すなわち、LEDランプ31から発光した光をレンズ33を通じて拡散または集中し、特に照明対象物を集中照明(スポット照明)するときには、レンズ33がLEDランプ31の光を集める。本発明に係るスポットランプユニット30は、夜間に歩行者や野生動物などを集中して照明することが主目的であるため、LEDランプ31から発光した光が照明対象に集中するように集光する。さらに、昼間には昼間点灯として使用したり、夜間にはハイビームを補助することが副目的であるため、それぞれの使用目的に適合するように発光した光を拡散したり集光したりする。
このとき、レンズ33は、光学的特性に優れた非球面レンズを適用する。
【0016】
一方、LEDランプ31は、夜間走行時に、歩行者または野生動物のような照明対象物をスポット照明することができるが、夜間走行時に照明対象物をスポット照明する頻度は少ない。このため、昼間には他の車からの識別が容易なように昼間点灯として使用したり、夜間にはハイビームを補助するランプとして使用することができる。そのために、LEDランプ31とレンズ33の距離が可変である構成が好ましい。
例えば、図4に示したとおり、ランプブラケット36に固定されたアクチュエータ37と、アクチュエータ37の先端にピボット38を媒介として連結され、LEDランプ31とヒートシンク32が搭載されたランプホルダ35とを備え、アクチュエータ37の伸縮によってランプホルダ35がガイド(図面符号は付与せず)上を移動し、LEDランプ31が前進または後進することにより、LEDランプ31とレンズ33の距離を変化させることができる。
すなわち、アクチュエータ37の先端が前進すれば、LEDランプ31が搭載されたランプホルダ35が前進し、LEDランプ31を前進させる。これとは反対に、アクチュエータ37の先端が後進すれば、ランプホルダ35が後進し、LEDランプ31が後進する。レンズ33の位置は固定されているため、LEDランプ31とレンズ33の距離が変化し、LEDランプ31から発光した光を拡散したり集光したりすることができる。
【0017】
一方、図に示していないが、レンズ33をLEDランプ31に対して前進または後進させることもでき、LEDランプ31とレンズ33がすべて移動可能な構造としてLEDランプ31とレンズ33の距離を変化させ、LEDランプ31から照射した光を集中させたり拡散させたりすることができる。
したがって、スポットランプユニット30は、図4に示したとおり、レンズ33を利用してLEDランプ31から発光した光を集め、前方の照明対象物をスポット照明することができる。
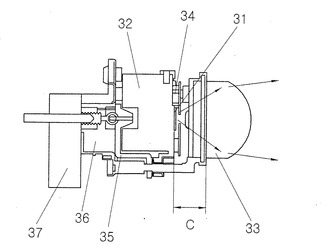
さらに、昼間の昼間点灯として使用したり、夜間にハイビームを補助する場合には、図6および図7に示すとおり、LEDランプ31とレンズ33の距離を変更してLEDランプ31から発光した光を制御する。すなわち、図4、図6、および図7に示したとおり、LEDランプ31とレンズ33の距離をそれぞれA、B、Cに変更してLEDランプ31から発光した光を集中させたり拡散させる。LEDランプ31とレンズ33の距離は、前方をスポット照明する状態のLEDランプ31とレンズ33の距離(A)よりも、夜間にハイビーム補助として使用するときの昼間点灯として使用するときのLEDランプ31とレンズ33の距離(C)が短く、昼間点灯として使用するときのLEDランプ31とレンズ33の距離(B)が最も短く構成されるが、その距離はレンズ33の屈折率に応じて異なる。
【0018】
さらに、スポット照明時には、LEDランプ31の特定LEDだけを点灯してスポット照明領域を照らすが、昼間点灯または夜間のハイビーム補助などを使用する場合には、複数のLEDが点灯される。
このようなスポットランプユニット30がヘッドライト10の内部にヘッドライトハイビームと呼ばれるハイ/ロービームユニット12と共に備えられることにより、通常走行時にはハイ/ロービームユニット12を通じて前方を照明し、スポット照明が必要な場合にはスポットランプユニット30を作動させることが好ましい。
本発明に係るスポット照明が可能なヘッドライトシステムは、上述したスポットランプユニット30をヘッドライト10の内部に備え、車が走行しながら前方のスポット照明対象を認識してスポット照明ユニットを点灯させる。
【0019】
このようなスポット照明が可能なヘッドライトシステムは、図1に示したとおり、赤外線を放射する赤外線放射器21と、前方を赤外線を撮影するカメラ22と、カメラ22が撮影した映像から照明対象を読み取る映像処理部23と、前方を複数の領域に分割して選択的に照明することができるスポットランプユニット30と、スポット照明対象がスポット照明されるようにスポットランプユニット30を作動させるランプ駆動部24とを含む。
赤外線放射器21は車の前方に位置し、車の走行方向に持続的に赤外線を放射する。夜間には可視光線によって物体を識別することができないため、赤外線を通じて物体を識別しなければならず、赤外線放射器21を利用して車の前方に赤外線を放射する。
【0020】
カメラ22は、赤外線放射器21が車の前方に放射した赤外線が照明対象物によって反射された赤外線映像を撮影する。
映像処理部23は、カメラ22が取得した映像を処理し、処理された映像から照明対象物を識別し、識別された照明対象物の危険性の有無を判断する。映像処理部23は、カメラ22を通じて取得された映像を前処理するイメージングプロセッシングによって撮影された映像から照明対象物を識別する。
【0021】
一方、撮影された映像から照明対象物を識別する技術は、通常のイメージプロセッシングによって映像を識別する周知技術であるため、詳しい説明は省略する。
さらに、映像処理部23は、上記のとおり照明対象物が識別されれば、照明対象物が危険な状態であるかを判断する。すなわち、照明対象物が識別されても、照明対象物が車の進行方向から遠くに離隔している場合のように照明対象物が危険な状態でなければ、あえて照明対象物を照明する必要がないため、スポット照明ユニットを作動させない。照明対象物の危険性の有無の判断は、例えば、照明対象物が車の進行経路上または車の進行経路に隣接して存在している場合や、照明対象物が車の進行経路に接近する場合などを照明対象物が危険な状態であると判断する。
【0022】
スポットランプユニット30は、上記のとおり、前方の照射領域を分割してそれぞれスポット照明することができる複数のLEDランプ31を含んでおり、各LEDランプ31が車の前方を複数の領域に分割して各領域を分担して照明する。
ランプ駆動部24は、映像処理部23で照明対象物が危険であると判断した時、スポットランプユニット30に作用し、照明対象物を照射するLEDランプ31のLEDを点灯させる。ランプ駆動部24は映像処理部23に連結されており、映像処理部23から危険状況(照明が必要な状況)として伝達された照明対象領域を照明するスポットランプユニット30の該当LEDランプ31に電力を印加する。
上記のとおり、本発明に係るスポット照明が可能なヘッドライトシステムは、図5の(a)、(b)に示したとおり、前方の照明対象物をスポット照明することができる。図5の(a)はテスト状態を示すものであって、図5(a)の上部に図示したとおり、スポット照明を稼動(On)させて、点線で示す四角の範囲をスポット照射するため、照明対象物を容易に認識することができる。また、図5(b)の下図のとおり、夜間走行時に照明対象物をスポット照明(On)すると、点線で示した四角の範囲をスポット照射するため、運転手が容易に照明対象物を認識することができる。
【0023】
本発明に係るスポットランプユニットが備えられたヘッドライトシステムを利用した前方照明方法を、図8に基づいて説明する。
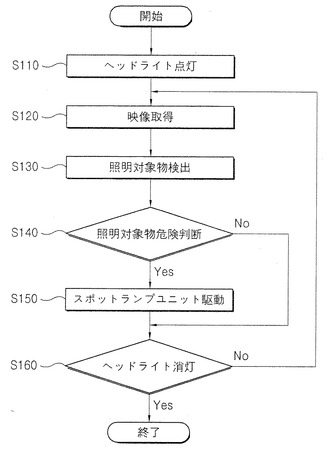
本発明に係る前方照明方法は、車のヘッドライト10を点灯させるヘッドライト点灯段階(S110)と、赤外線カメラ22を利用して前方を撮影する映像取得段階(S120)と、映像取得段階(S120)で取得した映像から照明対象物を認識する照明対象物検出段階(S130)と、照明対象物検出段階(S130)で撮影した映像から照明対象物の危険性の有無を判断する照明対象物危険判断段階(S140)と、照明対象物危険判断段階(S140)で照明対象物が危険であると判断すると、照明対象物を照射するスポットランプユニット30を点灯させるスポットランプ駆動段階(S150)とを含む。
ヘッドライト点灯段階(S110)は、手動または自動でヘッドライト10を点灯させる段階である。車の前方に備えられたヘッドライト10は、運転手によって手動で点灯されたり、外部が一定の照度以下に低下した時自動で点灯されたりする。特定領域をスポット照明するためには、一次的に前方が広く照明されるようにヘッドライト10が点灯される。
【0024】
映像取得段階(S120)は、走行中の車の前方状態を映像で撮影し、前方の状態を映像データで確保する。車の前方に備えられた赤外線放射器21から、車の前方に赤外線を放射し、放射された赤外線が照明対象物に反射した赤外線映像を、カメラ22が撮影し、車前方の状態に対する映像を取得する。
照明対象物検出段階(S130)は、取得した映像から照明対象物を検出する。取得した映像は映像処理部23で読み取られ、取得した映像内部から照明対象物を検出する。映像処理部23は、先ず、取得した映像を補正、リマッピングなどにより映像を照明対象物を読み取り易くするための前処理を行う。映像処理部23は、前処理された映像から明るさや形態などに基づいて照明対象物を検出する。
【0025】
照明対象物危険判断段階(S140)では、照明対象物検出段階(S130)で検出した照明対象物の危険性の有無を確認する。すなわち、映像処理部23は、照明対象物が車の進行方向または進行方向と隣接した領域に存在するか、照明対象物が車の進行方向に接近するように移動しているか、または照明対象物に向かって車が進行しているかなどを判断して照明対象物の危険性の有無を判断する。
もし、照明対象物危険判断段階(S140)で照明対象物が危険であると判断されれば、スポットランプユニット30のうちで照明対象物が存在する領域を照射するようにLEDランプ31を点灯させる。スポットランプ駆動段階(S150)では、スポットランプユニット30が、複数のLEDランプ31を車前方の照射領域を分割して各領域を分担して照明するように構成されているため、危険であると判断された照明対象物が位置した領域を照射するLEDランプ31を点灯させる。夜間走行のためにヘッドライト10が車の前方を広く照明している状態において、照明対象物が位置した領域をLEDランプ31が付加的に照明することにより、運転手は照明対象物の位置を容易に認知し、事故を未然に防ぐことができる。
【0026】
スポットランプ駆動段階(S150)が実行された後には、車のヘッドライト10が点灯しているかを判断するヘッドライト消灯判断段階(S160)が実行される。上記の映像取得段階(S120)からスポットランプ駆動段階(S150)は、車のヘッドライト10が点灯している状態で付加的に歩行者や野生動物のような照明対象物を照明するものであるため、ヘッドライト10が点灯した状態でのみ実行される。したがって、スポットランプ駆動段階(S150)が実行された後にヘッドライト10の消灯可否を確認し、ヘッドライト10が消灯していなければ映像取得段階(S120)にリターンし、ヘッドライト10が消灯していればすべてのプロセスを終了する。
【符号の説明】
【0027】
10 ・・・ヘッドライト
11 ・・・ハウジング
12 ・・・ハイ/ロービームユニット
13 ・・・カバー
21 ・・・赤外線放射器
22 ・・・カメラ
23 ・・・映像処理部
24 ・・・ランプ駆動部
30 ・・・スポットランプユニット
31 ・・・LEDランプ
32 ・・・ヒートシンク
33 ・・・レンズ
34 ・・・カバー
35 ・・・ランプホルダ
36 ・・・ランプブラケット
37 ・・・アクチュエータ
38 ・・・ピボット
S110 ・・・ヘッドライト点灯段階
S120 ・・・映像取得段階
S130 ・・・照明対象物検出段階
S140 ・・・照明対象物危険判断段階
S150 ・・・スポットランプ駆動段階
S160 ・・・ヘッドライト消灯判断段階
【技術分野】
【0001】
本発明は、スポットランプユニット、このスポットランプユニットが備えられたヘッドライトシステム、およびこれを利用した前方照明方法に係り、より詳しくは、夜間走行時に歩行者を認識し、ヘッドライトを通じて前方照明と共にスポットランプユニットを利用して歩行者がいる領域に追加的にスポット照明することができるスポットランプユニット、このスポットランプユニットが備えられたヘッドライトシステム、およびこれを利用した前方照明方法に関する。
【背景技術】
【0002】
車の前方には、夜間時に前方の視野を確保するための手段として複数のヘッドランプからなるヘッドライトが備えられており、主に夜間走行時、トンネル走行時、または雨天時に、手動または自動で点灯して運転手の前方視野を確保する。
しかし、現在の車のヘッドライトは、単に前方の広い範囲をヘッドライトで照らす方式であるため、十分な明るさで前方を照明することができず、十分に視野を確保することができないという問題点がある。
特に夜間に歩行者や野生動物を発見することができず、事故に繋がるケースが多くあった。すなわち、従来のヘッドライトは、広い前方領域を漫然と照らすため、前方の歩行者または野生動物を適切に把握することができず、歩行者事故またはロードキルに繋がるという問題がある。
【0003】
一方、これを解決するために、車の前方に赤外線カメラを備え、車の計器盤または別途に備えられたモニタを利用して前方を注視する技術も開発されている。しかし、この技術は、車の前方に備えられた赤外線カメラで車の前方を撮影した後、これを別途のモニタを通じて確認するため、運転手は前方注視と共にモニタも注視しなければならず、前方注視力を悪化させる問題点がある。
下記の特許文献1〜4には、上述した、前方を赤外線撮影してモニタにディスプレイするために、ヘッドライトの光源を利用して選択的に赤外線の照射が可能な赤外線投光器を含むナイトビジョン装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】KR10−2005−0078507A
【特許文献2】特開2004−364112号公報
【特許文献3】特開2005−184523号公報
【特許文献4】特開2010−123046号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は上記の問題を解決するためになされたものであって、その目的とするところは、前方の広い範囲を照明するヘッドランプの他に、歩行者や野生動物の出現時に歩行者や野生動物を認識して追加的に集中照明できるスポットランプユニットを提供することにある。
また、他の目的とするところは、上記スポットランプユニットが備えられたヘッドライトシステムを提供することにある。
さらに、他の目的とするところは、上記スポットランプユニットが備えられたヘッドライトシステムを利用した前方照明方法を提供することにある。
【課題を解決するための手段】
【0006】
上記目的を達成するためになされた本発明のスポットランプユニットは、車のヘッドライト内部または車の前端に装着され、前方の照明領域を分割してそれぞれ照明する複数のLEDが設置されたLEDランプと、LEDランプから発生した熱を外部に放熱させるためにLEDランプの後面に設置されるヒートシンクと、LEDランプの前方に備えられ、LEDランプで発光した光を拡散または集光させるレンズと、を含むことを特徴とする。
【0007】
本発明のスポットランプユニットは、LEDランプとレンズの間の距離は可変であり、先端が前進と後進が可能なアクチュエータと、アクチュエータの先端に固定され、LEDランプとヒートシンクが搭載されるランプホルダとをさらに備え、アクチュエータがLEDランプを前進または後進させてLEDランプとレンズの距離を変化させることにより、LEDランプから発光した光を集中して照明することを特徴とする。
スポットランプユニットのレンズは非球面レンズであることを特徴とする。
【0008】
本発明の一側面に他のスポットランプユニットが備えられたヘッドライトシステムは、車の前方に赤外線を放射する赤外線放射器と、赤外線放射器から放射された赤外線のうちで照明対象物から反射された赤外線を撮影するカメラと、カメラで撮影した映像から照明対象物を読み取って照明対象物の危険性の有無を判定する映像処理部と、車前方の照明領域を分割してそれぞれ照明する複数のLEDが装着されたLEDランプとを含むスポットランプユニットと、映像処理部で照明対象物が危険であると判定されれば、照明対象物が位置した領域を照明するLEDランプのLEDが点灯するようにスポットランプユニットを駆動させるランプ駆動部と、を含むことを特徴とする。
【0009】
一方、スポット照明が可能なヘッドライトを利用した前方照明方法は、ヘッドライトを点灯させるヘッドライト点灯段階と、車に備えられた赤外線放射器から車進行方向に赤外線を放射し、照明対象物から反射した赤外線を受光して映像イメージとして格納する映像取得段階と、映像取得段階で格納した映像から照明対象物を認識するための照明対象物検出段階と、照明対象物検出段階で照明対象物が検出されれば、検出された照明対象物の危険性の有無を判断する照明対象物危険判断段階と、照明対象物危険判断段階で照明対象物が危険であると判断されれば、スポットランプを点灯させて照明対象物を照明するスポットランプ駆動段階と、を含むことを特徴とする。
【0010】
ここで、スポットランプ駆動段階が実行された後には、ヘッドライトが消灯したかを確認するヘッドライト消灯判断段階をさらに含むことを特徴とする。
さらに、ヘッドライト消灯判断段階でヘッドライトが消灯していないと判断されれば、映像取得段階にリターンすることを特徴とする。
また、照明対象物危険判断段階で照明対象物が危険でないと判断されれば、ヘッドライト消灯判断段階が実行されることを特徴とする。
【発明の効果】
【0011】
本発明に係るスポットランプユニット、このスポットランプユニットが備えられたヘッドライトシステム、およびこれを利用した前方照明方法によれば、前方を広く照明するヘッドランプの他に、夜間に歩行者または野生動物を認識し、歩行者や野生動物を照らすスポットランプユニットを利用して歩行者や野生動物を集中照明することにより、運転手が視覚を通じて歩行者または野生動物を認識することによって夜間走行の安全性を向上させることができる。
また、スポットランプユニットは、焦点距離を変化させ、昼間には昼間点灯として使用することによって走行の安全性を向上させることができ、夜間の通常走行時にはハイビームなどを補助して前方を照明することができるため、車両走行の安全性を向上させることができる。
【図面の簡単な説明】
【0012】
【図1】本発明に係るスポットランプユニットが備えられたヘッドライトシステムを示すブロック図である。
【図2】本発明に係るスポットランプユニットが備えられたヘッドライトの分解斜視図である。
【図3】本発明に係るスポットランプユニットのLEDランプを示す図であり、(a)はLEDランプが設置されたプリント基板を示す斜視図であり、(b)はLEDランプが点灯している状態を撮影した写真である。
【図4】本発明に係るスポットランプユニットを利用してスポット照明時のスポットランプユニットの断面図である。
【図5】本発明に係るスポットランプユニットが備えられたヘッドライトシステムを利用して前方を照明した状態を撮影した写真であって、(a)は本発明に係るスポットランプユニットが備えられたヘッドライトシステムをテストして前方の事物を照らした状態を撮影した写真であり、(b)は本発明に係るスポットランプユニットが備えられたヘッドライトシステムを利用して夜間の道路走行時に歩行者をスポット照明した状態を示す写真である。
【図6】本発明に係るスポットランプユニットを利用して昼間点灯として使用する時のスポットランプユニットの断面図である。
【図7】本発明に係るスポットランプユニットを利用してハイビーム補助照明として使用する時のスポットランプユニットの断面図である。
【図8】本発明に係るスポットランプユニットが備えられたヘッドライトシステムを利用した前方照明方法を示すフローチャートである。
【発明を実施するための形態】
【0013】
以下、添付の図面に基づき、本発明に係るスポットランプユニット、このスポットランプユニットが備えられたヘッドライトシステム、およびこれを利用した前方照明方法について説明する。
先ず、図4に基づき、本発明に係るスポットランプユニットについて,詳細に説明する。
本発明に係るスポットランプユニット30は、電力が印加されれば発光するLEDランプ31と、LEDランプ31を冷却させるヒートシンク32と、LEDランプ31の前方に備えられLEDランプ31から発光した光の照射方向を調節するレンズ33とを含み、車のヘッドライト10内部に組み込まれて設置されるか、またはヘッドライト10とは別途に車の前方に設置される。
【0014】
LEDランプ31は、LEDが設置されたプリント基板(PCB)にチップセットの形態で備えられ、車前方を分割する領域の数によってLEDがその数だけ設置される。例えば、車の前方左側及び右側をそれぞれ4つの領域に分割し、そのうちの1つの領域を選択してスポット照明すれば、図3(a)および(b)に示したとおり、LEDランプ31内のLEDは4の倍数で備えられる。例えば、図3(a)のLEDランプ31が丸1〜丸4のLEDからなれば、図3(b)に丸1〜丸4で示したとおり、4つのLEDのうちから該当する領域を照射するLEDを選択して発光させることによってスポット照明が可能となる。
ヒートシンク32は、LEDランプ31の後面に付着し、LEDランプ31の点灯によって発生した熱を放熱する。LEDランプ31の後面にLEDランプ31の照射方向と反対方向に突出した放熱ピンが形成されており、LEDランプ31の点灯によって発生する熱を放熱する。
LEDランプ31とヒートシンク32は、車のヘッドライト10のハウジング11とカバー13の間の内部空間にランプブラケット36に固定された状態で設置される。
【0015】
レンズ33は、LEDランプ31の前方に位置し、LEDランプ31から発光した光の照射範囲を調節する。すなわち、LEDランプ31から発光した光をレンズ33を通じて拡散または集中し、特に照明対象物を集中照明(スポット照明)するときには、レンズ33がLEDランプ31の光を集める。本発明に係るスポットランプユニット30は、夜間に歩行者や野生動物などを集中して照明することが主目的であるため、LEDランプ31から発光した光が照明対象に集中するように集光する。さらに、昼間には昼間点灯として使用したり、夜間にはハイビームを補助することが副目的であるため、それぞれの使用目的に適合するように発光した光を拡散したり集光したりする。
このとき、レンズ33は、光学的特性に優れた非球面レンズを適用する。
【0016】
一方、LEDランプ31は、夜間走行時に、歩行者または野生動物のような照明対象物をスポット照明することができるが、夜間走行時に照明対象物をスポット照明する頻度は少ない。このため、昼間には他の車からの識別が容易なように昼間点灯として使用したり、夜間にはハイビームを補助するランプとして使用することができる。そのために、LEDランプ31とレンズ33の距離が可変である構成が好ましい。
例えば、図4に示したとおり、ランプブラケット36に固定されたアクチュエータ37と、アクチュエータ37の先端にピボット38を媒介として連結され、LEDランプ31とヒートシンク32が搭載されたランプホルダ35とを備え、アクチュエータ37の伸縮によってランプホルダ35がガイド(図面符号は付与せず)上を移動し、LEDランプ31が前進または後進することにより、LEDランプ31とレンズ33の距離を変化させることができる。
すなわち、アクチュエータ37の先端が前進すれば、LEDランプ31が搭載されたランプホルダ35が前進し、LEDランプ31を前進させる。これとは反対に、アクチュエータ37の先端が後進すれば、ランプホルダ35が後進し、LEDランプ31が後進する。レンズ33の位置は固定されているため、LEDランプ31とレンズ33の距離が変化し、LEDランプ31から発光した光を拡散したり集光したりすることができる。
【0017】
一方、図に示していないが、レンズ33をLEDランプ31に対して前進または後進させることもでき、LEDランプ31とレンズ33がすべて移動可能な構造としてLEDランプ31とレンズ33の距離を変化させ、LEDランプ31から照射した光を集中させたり拡散させたりすることができる。
したがって、スポットランプユニット30は、図4に示したとおり、レンズ33を利用してLEDランプ31から発光した光を集め、前方の照明対象物をスポット照明することができる。
さらに、昼間の昼間点灯として使用したり、夜間にハイビームを補助する場合には、図6および図7に示すとおり、LEDランプ31とレンズ33の距離を変更してLEDランプ31から発光した光を制御する。すなわち、図4、図6、および図7に示したとおり、LEDランプ31とレンズ33の距離をそれぞれA、B、Cに変更してLEDランプ31から発光した光を集中させたり拡散させる。LEDランプ31とレンズ33の距離は、前方をスポット照明する状態のLEDランプ31とレンズ33の距離(A)よりも、夜間にハイビーム補助として使用するときの昼間点灯として使用するときのLEDランプ31とレンズ33の距離(C)が短く、昼間点灯として使用するときのLEDランプ31とレンズ33の距離(B)が最も短く構成されるが、その距離はレンズ33の屈折率に応じて異なる。
【0018】
さらに、スポット照明時には、LEDランプ31の特定LEDだけを点灯してスポット照明領域を照らすが、昼間点灯または夜間のハイビーム補助などを使用する場合には、複数のLEDが点灯される。
このようなスポットランプユニット30がヘッドライト10の内部にヘッドライトハイビームと呼ばれるハイ/ロービームユニット12と共に備えられることにより、通常走行時にはハイ/ロービームユニット12を通じて前方を照明し、スポット照明が必要な場合にはスポットランプユニット30を作動させることが好ましい。
本発明に係るスポット照明が可能なヘッドライトシステムは、上述したスポットランプユニット30をヘッドライト10の内部に備え、車が走行しながら前方のスポット照明対象を認識してスポット照明ユニットを点灯させる。
【0019】
このようなスポット照明が可能なヘッドライトシステムは、図1に示したとおり、赤外線を放射する赤外線放射器21と、前方を赤外線を撮影するカメラ22と、カメラ22が撮影した映像から照明対象を読み取る映像処理部23と、前方を複数の領域に分割して選択的に照明することができるスポットランプユニット30と、スポット照明対象がスポット照明されるようにスポットランプユニット30を作動させるランプ駆動部24とを含む。
赤外線放射器21は車の前方に位置し、車の走行方向に持続的に赤外線を放射する。夜間には可視光線によって物体を識別することができないため、赤外線を通じて物体を識別しなければならず、赤外線放射器21を利用して車の前方に赤外線を放射する。
【0020】
カメラ22は、赤外線放射器21が車の前方に放射した赤外線が照明対象物によって反射された赤外線映像を撮影する。
映像処理部23は、カメラ22が取得した映像を処理し、処理された映像から照明対象物を識別し、識別された照明対象物の危険性の有無を判断する。映像処理部23は、カメラ22を通じて取得された映像を前処理するイメージングプロセッシングによって撮影された映像から照明対象物を識別する。
【0021】
一方、撮影された映像から照明対象物を識別する技術は、通常のイメージプロセッシングによって映像を識別する周知技術であるため、詳しい説明は省略する。
さらに、映像処理部23は、上記のとおり照明対象物が識別されれば、照明対象物が危険な状態であるかを判断する。すなわち、照明対象物が識別されても、照明対象物が車の進行方向から遠くに離隔している場合のように照明対象物が危険な状態でなければ、あえて照明対象物を照明する必要がないため、スポット照明ユニットを作動させない。照明対象物の危険性の有無の判断は、例えば、照明対象物が車の進行経路上または車の進行経路に隣接して存在している場合や、照明対象物が車の進行経路に接近する場合などを照明対象物が危険な状態であると判断する。
【0022】
スポットランプユニット30は、上記のとおり、前方の照射領域を分割してそれぞれスポット照明することができる複数のLEDランプ31を含んでおり、各LEDランプ31が車の前方を複数の領域に分割して各領域を分担して照明する。
ランプ駆動部24は、映像処理部23で照明対象物が危険であると判断した時、スポットランプユニット30に作用し、照明対象物を照射するLEDランプ31のLEDを点灯させる。ランプ駆動部24は映像処理部23に連結されており、映像処理部23から危険状況(照明が必要な状況)として伝達された照明対象領域を照明するスポットランプユニット30の該当LEDランプ31に電力を印加する。
上記のとおり、本発明に係るスポット照明が可能なヘッドライトシステムは、図5の(a)、(b)に示したとおり、前方の照明対象物をスポット照明することができる。図5の(a)はテスト状態を示すものであって、図5(a)の上部に図示したとおり、スポット照明を稼動(On)させて、点線で示す四角の範囲をスポット照射するため、照明対象物を容易に認識することができる。また、図5(b)の下図のとおり、夜間走行時に照明対象物をスポット照明(On)すると、点線で示した四角の範囲をスポット照射するため、運転手が容易に照明対象物を認識することができる。
【0023】
本発明に係るスポットランプユニットが備えられたヘッドライトシステムを利用した前方照明方法を、図8に基づいて説明する。
本発明に係る前方照明方法は、車のヘッドライト10を点灯させるヘッドライト点灯段階(S110)と、赤外線カメラ22を利用して前方を撮影する映像取得段階(S120)と、映像取得段階(S120)で取得した映像から照明対象物を認識する照明対象物検出段階(S130)と、照明対象物検出段階(S130)で撮影した映像から照明対象物の危険性の有無を判断する照明対象物危険判断段階(S140)と、照明対象物危険判断段階(S140)で照明対象物が危険であると判断すると、照明対象物を照射するスポットランプユニット30を点灯させるスポットランプ駆動段階(S150)とを含む。
ヘッドライト点灯段階(S110)は、手動または自動でヘッドライト10を点灯させる段階である。車の前方に備えられたヘッドライト10は、運転手によって手動で点灯されたり、外部が一定の照度以下に低下した時自動で点灯されたりする。特定領域をスポット照明するためには、一次的に前方が広く照明されるようにヘッドライト10が点灯される。
【0024】
映像取得段階(S120)は、走行中の車の前方状態を映像で撮影し、前方の状態を映像データで確保する。車の前方に備えられた赤外線放射器21から、車の前方に赤外線を放射し、放射された赤外線が照明対象物に反射した赤外線映像を、カメラ22が撮影し、車前方の状態に対する映像を取得する。
照明対象物検出段階(S130)は、取得した映像から照明対象物を検出する。取得した映像は映像処理部23で読み取られ、取得した映像内部から照明対象物を検出する。映像処理部23は、先ず、取得した映像を補正、リマッピングなどにより映像を照明対象物を読み取り易くするための前処理を行う。映像処理部23は、前処理された映像から明るさや形態などに基づいて照明対象物を検出する。
【0025】
照明対象物危険判断段階(S140)では、照明対象物検出段階(S130)で検出した照明対象物の危険性の有無を確認する。すなわち、映像処理部23は、照明対象物が車の進行方向または進行方向と隣接した領域に存在するか、照明対象物が車の進行方向に接近するように移動しているか、または照明対象物に向かって車が進行しているかなどを判断して照明対象物の危険性の有無を判断する。
もし、照明対象物危険判断段階(S140)で照明対象物が危険であると判断されれば、スポットランプユニット30のうちで照明対象物が存在する領域を照射するようにLEDランプ31を点灯させる。スポットランプ駆動段階(S150)では、スポットランプユニット30が、複数のLEDランプ31を車前方の照射領域を分割して各領域を分担して照明するように構成されているため、危険であると判断された照明対象物が位置した領域を照射するLEDランプ31を点灯させる。夜間走行のためにヘッドライト10が車の前方を広く照明している状態において、照明対象物が位置した領域をLEDランプ31が付加的に照明することにより、運転手は照明対象物の位置を容易に認知し、事故を未然に防ぐことができる。
【0026】
スポットランプ駆動段階(S150)が実行された後には、車のヘッドライト10が点灯しているかを判断するヘッドライト消灯判断段階(S160)が実行される。上記の映像取得段階(S120)からスポットランプ駆動段階(S150)は、車のヘッドライト10が点灯している状態で付加的に歩行者や野生動物のような照明対象物を照明するものであるため、ヘッドライト10が点灯した状態でのみ実行される。したがって、スポットランプ駆動段階(S150)が実行された後にヘッドライト10の消灯可否を確認し、ヘッドライト10が消灯していなければ映像取得段階(S120)にリターンし、ヘッドライト10が消灯していればすべてのプロセスを終了する。
【符号の説明】
【0027】
10 ・・・ヘッドライト
11 ・・・ハウジング
12 ・・・ハイ/ロービームユニット
13 ・・・カバー
21 ・・・赤外線放射器
22 ・・・カメラ
23 ・・・映像処理部
24 ・・・ランプ駆動部
30 ・・・スポットランプユニット
31 ・・・LEDランプ
32 ・・・ヒートシンク
33 ・・・レンズ
34 ・・・カバー
35 ・・・ランプホルダ
36 ・・・ランプブラケット
37 ・・・アクチュエータ
38 ・・・ピボット
S110 ・・・ヘッドライト点灯段階
S120 ・・・映像取得段階
S130 ・・・照明対象物検出段階
S140 ・・・照明対象物危険判断段階
S150 ・・・スポットランプ駆動段階
S160 ・・・ヘッドライト消灯判断段階
【特許請求の範囲】
【請求項1】
車のヘッドライトの内部または車の前端に装着され、前方の照明領域を分割してそれぞれ照明する複数のLEDが設置されたLEDランプと、
前記LEDランプから発生した熱を外部に放熱させるために前記LEDランプの後面に設置されるヒートシンクと、
前記LEDランプの前方に備えられ、前記LEDランプで発光した光を拡散または集光させるレンズと、
を含むことを特徴とするスポットランプユニット。
【請求項2】
前記LEDランプと前記レンズの間の距離は可変であることを特徴とする請求項1に記載のスポットランプユニット。
【請求項3】
先端が前進と後進が可能なアクチュエータと、
前記アクチュエータの先端に固定され、前記LEDランプと前記ヒートシンクが搭載されるランプホルダと、
をさらに備え、
前記アクチュエータが前記LEDランプを前進または後進させて前記LEDランプと前記レンズの距離を変化させることにより、LEDランプから発光した光を集中して照明することを特徴とする請求項2に記載のスポットランプユニット。
【請求項4】
前記レンズは非球面レンズであることを特徴とする請求項1に記載のスポットランプユニット。
【請求項5】
車の前方に赤外線を放射する赤外線放射器と、
前記赤外線放射器から放射された赤外線のうちで照明対象物から反射された赤外線を撮影するカメラと、
前記カメラで撮影した映像から照明対象物を読み取って照明対象物の危険性の有無を判定する映像処理部と、
車前方の照明領域を分割してそれぞれ照明する複数のLEDが装着されたLEDランプとを含むスポットランプユニットと、
前記映像処理部で照明対象物が危険であると判定されれば、前記照明対象物が位置した領域を照明する前記LEDランプの前記LEDが点灯するように前記スポットランプユニットを駆動させるランプ駆動部と、
を含むことを特徴とするスポット照明が可能なヘッドライトシステム。
【請求項6】
ヘッドライトを点灯させるヘッドライト点灯段階と、
車に備えられた赤外線放射器から車進行方向に赤外線を放射し、照明対象物から反射した赤外線を受光して映像イメージとして格納する映像取得段階と、
前記映像取得段階で格納した映像から照明対象物を認識するための照明対象物検出段階と、
前記照明対象物検出段階で照明対象物が検出されれば、検出された照明対象物の危険性の有無を判断する照明対象物危険判断段階と、
前記照明対象物危険判断段階で照明対象物が危険であると判断されれば、スポットランプを点灯させて照明対象物を照明するスポットランプ駆動段階と、
を含むことを特徴とするスポット照明が可能なヘッドライトを利用した前方照明方法。
【請求項7】
前記スポットランプ駆動段階が実行された後には、前記ヘッドライトが消灯したかを確認するヘッドライト消灯判断段階をさらに含むことを特徴とする請求項6に記載のスポット照明が可能なヘッドライトを利用した前方照明方法。
【請求項8】
前記ヘッドライト消灯判断段階でヘッドライトが消灯していないと判断されれば、前記映像取得段階にリターンすることを特徴とする請求項7に記載のスポット照明が可能なヘッドライトを利用した前方照明方法。
【請求項9】
前記照明対象物危険判断段階で照明対象物が危険でないと判断されれば、前記ヘッドライト消灯判断段階が実行されることを特徴とする請求項8に記載のスポット照明が可能なヘッドライトを利用した前方照明方法。
【請求項1】
車のヘッドライトの内部または車の前端に装着され、前方の照明領域を分割してそれぞれ照明する複数のLEDが設置されたLEDランプと、
前記LEDランプから発生した熱を外部に放熱させるために前記LEDランプの後面に設置されるヒートシンクと、
前記LEDランプの前方に備えられ、前記LEDランプで発光した光を拡散または集光させるレンズと、
を含むことを特徴とするスポットランプユニット。
【請求項2】
前記LEDランプと前記レンズの間の距離は可変であることを特徴とする請求項1に記載のスポットランプユニット。
【請求項3】
先端が前進と後進が可能なアクチュエータと、
前記アクチュエータの先端に固定され、前記LEDランプと前記ヒートシンクが搭載されるランプホルダと、
をさらに備え、
前記アクチュエータが前記LEDランプを前進または後進させて前記LEDランプと前記レンズの距離を変化させることにより、LEDランプから発光した光を集中して照明することを特徴とする請求項2に記載のスポットランプユニット。
【請求項4】
前記レンズは非球面レンズであることを特徴とする請求項1に記載のスポットランプユニット。
【請求項5】
車の前方に赤外線を放射する赤外線放射器と、
前記赤外線放射器から放射された赤外線のうちで照明対象物から反射された赤外線を撮影するカメラと、
前記カメラで撮影した映像から照明対象物を読み取って照明対象物の危険性の有無を判定する映像処理部と、
車前方の照明領域を分割してそれぞれ照明する複数のLEDが装着されたLEDランプとを含むスポットランプユニットと、
前記映像処理部で照明対象物が危険であると判定されれば、前記照明対象物が位置した領域を照明する前記LEDランプの前記LEDが点灯するように前記スポットランプユニットを駆動させるランプ駆動部と、
を含むことを特徴とするスポット照明が可能なヘッドライトシステム。
【請求項6】
ヘッドライトを点灯させるヘッドライト点灯段階と、
車に備えられた赤外線放射器から車進行方向に赤外線を放射し、照明対象物から反射した赤外線を受光して映像イメージとして格納する映像取得段階と、
前記映像取得段階で格納した映像から照明対象物を認識するための照明対象物検出段階と、
前記照明対象物検出段階で照明対象物が検出されれば、検出された照明対象物の危険性の有無を判断する照明対象物危険判断段階と、
前記照明対象物危険判断段階で照明対象物が危険であると判断されれば、スポットランプを点灯させて照明対象物を照明するスポットランプ駆動段階と、
を含むことを特徴とするスポット照明が可能なヘッドライトを利用した前方照明方法。
【請求項7】
前記スポットランプ駆動段階が実行された後には、前記ヘッドライトが消灯したかを確認するヘッドライト消灯判断段階をさらに含むことを特徴とする請求項6に記載のスポット照明が可能なヘッドライトを利用した前方照明方法。
【請求項8】
前記ヘッドライト消灯判断段階でヘッドライトが消灯していないと判断されれば、前記映像取得段階にリターンすることを特徴とする請求項7に記載のスポット照明が可能なヘッドライトを利用した前方照明方法。
【請求項9】
前記照明対象物危険判断段階で照明対象物が危険でないと判断されれば、前記ヘッドライト消灯判断段階が実行されることを特徴とする請求項8に記載のスポット照明が可能なヘッドライトを利用した前方照明方法。
【図1】


【図2】
【図3】

【図4】

【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−98169(P2013−98169A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2012−130591(P2012−130591)
【出願日】平成24年6月8日(2012.6.8)
【出願人】(591251636)現代自動車株式会社 (1,064)
【出願人】(507098483)ヒュンダイ・モービス・カンパニー・リミテッド (10)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成24年6月8日(2012.6.8)
【出願人】(591251636)現代自動車株式会社 (1,064)
【出願人】(507098483)ヒュンダイ・モービス・カンパニー・リミテッド (10)
【Fターム(参考)】
[ Back to top ]