
スポット溶接用のトランス内蔵型ロボット
【課題】スポット溶接用ロボットの重心を安定化させると共に、その先端を軽くし、そのロボットのタクト・タイムが短く、動作が迅速で、反応の早いスポット溶接用ロボットを提供すること。
【解決手段】溶接ガン7、溶接トランス5、加圧機構6を有するスポット溶接用ロボットにおいて、スポット溶接用ロボットの先端部の内部に溶接用トランスを内蔵し、当該ロボットの先端部の先端に設けられている当該ロボットのマウント8に溶接ガンのマウントを装着したこと。さらに、前記溶接用トランス及び溶接ガンが小型かつ軽量であること。
【解決手段】溶接ガン7、溶接トランス5、加圧機構6を有するスポット溶接用ロボットにおいて、スポット溶接用ロボットの先端部の内部に溶接用トランスを内蔵し、当該ロボットの先端部の先端に設けられている当該ロボットのマウント8に溶接ガンのマウントを装着したこと。さらに、前記溶接用トランス及び溶接ガンが小型かつ軽量であること。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、スポット溶接用のトランスを先端部に内蔵するロボットに関する。
【背景技術】
【0002】
従来、ロボットに溶接装置を搭載する場合は、溶接ヘッド又はワーク把持装置をその先端に搭載していた(例えば、特許文献1,2参照。)。
特に、スポット溶接用ロボットは、スポット溶接用のトランス及び溶接ガンをスポット溶接用ロボットの先端に一体として搭載していたので、重心は溶接ガンの先端近くにあり、重く、大型で、安定せず、動作も鈍く、タクト・タイムが長く、電力消費量も大きいという問題があった。
【0003】
【特許文献1】特開2006−82089号公報([0011])
【特許文献2】特開2006−82088号公報([0013])
【発明の開示】
【発明が解決しようとする課題】
【0004】
そこで、本発明は、スポット溶接用ロボットの重心を安定化させると共に、その先端を軽くし、そのロボットのタクト・タイムが短く、動作が迅速で、反応の早いスポット溶接用ロボットを提供することを目的とする。
【課題を解決するための手段】
【0005】
前記目的を達成するため、本発明のスポット溶接用のトランス内蔵型ロボットは、
スポット溶接用ロボットの先端部の内部に溶接用トランスを内蔵し、当該ロボットの先端部の先端に設けられている当該ロボットのマウントに溶接ガンのマウントを装着したことからなる。
【0006】
さらに、前記溶接用トランス及び溶接ガンが小型かつ軽量であることからなる。
【発明の効果】
【0007】
本発明により、スポット溶接用ロボットの重心を安定化させると共に、その先端を軽くし、そのロボットのタクト・タイムが短く、動作が短く、かつ迅速で、反応が早く、さらに作業に応じて最も適した溶接ガンを選定して迅速簡単に取り替え装着が出来るものである。
【発明を実施するための最良の形態】
【0008】
本発明の実施の形態の一例を図面にしたがって説明する。
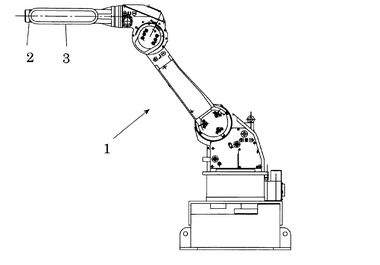
図1は、スポット溶接用のロボット本体を示す図である。
ロボット本体1の先端部3の先端に設けられているマウント2に、図2の場合は、溶接用トランス5のマウント4を装着し、図3の場合は溶接ガンのマウント8を装着するものである。
【0009】
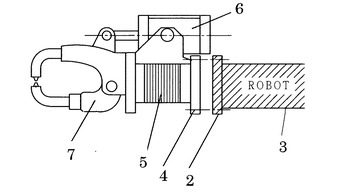
図2は、従来のスポット溶接用のトランス及び溶接ガンをスポット溶接用のロボットの先端に一体として搭載した状態を示す図である。
【0010】
溶接用のトランス5のマウント4がロボット本体1の先端部3の先端に設けられているマウント2に装着されている。
この従来の形式は、溶接ガン7の後方(ロボット本体1の方向)にトランス5が設けられ当該トランス5の上に加圧機構6が固設され、当該トランス5がロボット本体1の先端のマウント2に装着(搭載)されているため、当該ロボットの重心が先端に近く、不安定になり、スポット溶接用のロボットも大型化され、このため当該ロボットのタクト・タイムは長く、電力消費量も大きなものであった。
【0011】
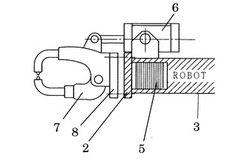
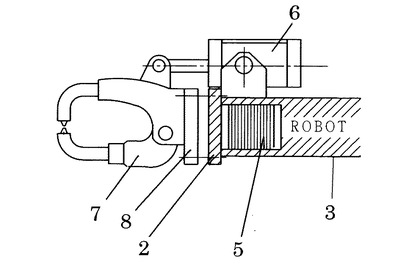
図3は、本発明の、溶接用トランスをスポット溶接用ロボットに内蔵した状態を示す図である。
ロボット本体1の先端部3の内部に溶接用トランス5を内蔵させ、ロボット本体1の先端部3の先端に設けられているロボットのマウント2に溶接ガン7のマウント8を装着させ、加圧機構6をロボット本体1の先端部3の上部に固設するものである。加圧機構6は、溶接ガン7の形状により溶接ガン7の上部又は下部に固設することも出来るが(図示せず)、ロボット本体1の先端部3の上部に固設するのが最も好適である。
【0012】
本発明における溶接ガン7は、重さ約20kg、縦約300mm、横約100mm(従来の溶接ガンは重さ約100kg、縦約600mm、横約300mm)のもので、溶接用トランス5は、高出力化(インバータ約 3,000 ヘルツ)したもので、重さ約20kg〜30kg、(従来の溶接用トランスはインバータ約 1,000 ヘルツ、重さ約45kg〜50kg)であり、愛知産業(株)が製造、販売しているもので非常に小型かつ軽量のものである。
【0013】
このように、溶接ガン7及び溶接用トランス5が小型かつ軽量のものが使用され、当該ロボット本体1の重心が先端より下がって安定化されること等により、当該ロボット本体1も小型化され、稼働のための電量も少なくなり、ロボットの動作も迅速で、タクト・タイムも短くなり、反応も早くなるものである。
【0014】
又、当該小型かつ軽量の溶接ガン7のマウント8を当該ロボットのマウント2に装着するだけなので、作業に応じて最も適合した溶接ガン7を選定して迅速、簡単に取り替え装着が出来るものであり、溶接トランス5も高出力で小型かつ軽量のものが使用されるので電力消費も低減されるものである。
【図面の簡単な説明】
【0015】
【図1】スポット溶接用のロボット本体を示す図である。
【図2】従来のスポット溶接用のトランス及び溶接ガンをスポット溶接用のロボットの先端に一体として搭載した状態を示す図である。
【図3】本発明の、溶接用トランスをスポット溶接用ロボットに内蔵した状態を示す図である。
【符号の説明】
【0016】
1 ロボット本体
2 ロボットのマウント
3 ロボット本体の先端部
4 溶接用のトランスのマウント
5 溶接用トランス
6 加圧機構
7 溶接ガン
8 溶接ガンのマウント
【技術分野】
【0001】
本発明は、スポット溶接用のトランスを先端部に内蔵するロボットに関する。
【背景技術】
【0002】
従来、ロボットに溶接装置を搭載する場合は、溶接ヘッド又はワーク把持装置をその先端に搭載していた(例えば、特許文献1,2参照。)。
特に、スポット溶接用ロボットは、スポット溶接用のトランス及び溶接ガンをスポット溶接用ロボットの先端に一体として搭載していたので、重心は溶接ガンの先端近くにあり、重く、大型で、安定せず、動作も鈍く、タクト・タイムが長く、電力消費量も大きいという問題があった。
【0003】
【特許文献1】特開2006−82089号公報([0011])
【特許文献2】特開2006−82088号公報([0013])
【発明の開示】
【発明が解決しようとする課題】
【0004】
そこで、本発明は、スポット溶接用ロボットの重心を安定化させると共に、その先端を軽くし、そのロボットのタクト・タイムが短く、動作が迅速で、反応の早いスポット溶接用ロボットを提供することを目的とする。
【課題を解決するための手段】
【0005】
前記目的を達成するため、本発明のスポット溶接用のトランス内蔵型ロボットは、
スポット溶接用ロボットの先端部の内部に溶接用トランスを内蔵し、当該ロボットの先端部の先端に設けられている当該ロボットのマウントに溶接ガンのマウントを装着したことからなる。
【0006】
さらに、前記溶接用トランス及び溶接ガンが小型かつ軽量であることからなる。
【発明の効果】
【0007】
本発明により、スポット溶接用ロボットの重心を安定化させると共に、その先端を軽くし、そのロボットのタクト・タイムが短く、動作が短く、かつ迅速で、反応が早く、さらに作業に応じて最も適した溶接ガンを選定して迅速簡単に取り替え装着が出来るものである。
【発明を実施するための最良の形態】
【0008】
本発明の実施の形態の一例を図面にしたがって説明する。
図1は、スポット溶接用のロボット本体を示す図である。
ロボット本体1の先端部3の先端に設けられているマウント2に、図2の場合は、溶接用トランス5のマウント4を装着し、図3の場合は溶接ガンのマウント8を装着するものである。
【0009】
図2は、従来のスポット溶接用のトランス及び溶接ガンをスポット溶接用のロボットの先端に一体として搭載した状態を示す図である。
【0010】
溶接用のトランス5のマウント4がロボット本体1の先端部3の先端に設けられているマウント2に装着されている。
この従来の形式は、溶接ガン7の後方(ロボット本体1の方向)にトランス5が設けられ当該トランス5の上に加圧機構6が固設され、当該トランス5がロボット本体1の先端のマウント2に装着(搭載)されているため、当該ロボットの重心が先端に近く、不安定になり、スポット溶接用のロボットも大型化され、このため当該ロボットのタクト・タイムは長く、電力消費量も大きなものであった。
【0011】
図3は、本発明の、溶接用トランスをスポット溶接用ロボットに内蔵した状態を示す図である。
ロボット本体1の先端部3の内部に溶接用トランス5を内蔵させ、ロボット本体1の先端部3の先端に設けられているロボットのマウント2に溶接ガン7のマウント8を装着させ、加圧機構6をロボット本体1の先端部3の上部に固設するものである。加圧機構6は、溶接ガン7の形状により溶接ガン7の上部又は下部に固設することも出来るが(図示せず)、ロボット本体1の先端部3の上部に固設するのが最も好適である。
【0012】
本発明における溶接ガン7は、重さ約20kg、縦約300mm、横約100mm(従来の溶接ガンは重さ約100kg、縦約600mm、横約300mm)のもので、溶接用トランス5は、高出力化(インバータ約 3,000 ヘルツ)したもので、重さ約20kg〜30kg、(従来の溶接用トランスはインバータ約 1,000 ヘルツ、重さ約45kg〜50kg)であり、愛知産業(株)が製造、販売しているもので非常に小型かつ軽量のものである。
【0013】
このように、溶接ガン7及び溶接用トランス5が小型かつ軽量のものが使用され、当該ロボット本体1の重心が先端より下がって安定化されること等により、当該ロボット本体1も小型化され、稼働のための電量も少なくなり、ロボットの動作も迅速で、タクト・タイムも短くなり、反応も早くなるものである。
【0014】
又、当該小型かつ軽量の溶接ガン7のマウント8を当該ロボットのマウント2に装着するだけなので、作業に応じて最も適合した溶接ガン7を選定して迅速、簡単に取り替え装着が出来るものであり、溶接トランス5も高出力で小型かつ軽量のものが使用されるので電力消費も低減されるものである。
【図面の簡単な説明】
【0015】
【図1】スポット溶接用のロボット本体を示す図である。
【図2】従来のスポット溶接用のトランス及び溶接ガンをスポット溶接用のロボットの先端に一体として搭載した状態を示す図である。
【図3】本発明の、溶接用トランスをスポット溶接用ロボットに内蔵した状態を示す図である。
【符号の説明】
【0016】
1 ロボット本体
2 ロボットのマウント
3 ロボット本体の先端部
4 溶接用のトランスのマウント
5 溶接用トランス
6 加圧機構
7 溶接ガン
8 溶接ガンのマウント
【特許請求の範囲】
【請求項1】
溶接ガン、溶接用トランス、加圧機構を有するスポット溶接用ロボットにおいて、
スポット溶接用ロボットの先端部の内部に溶接用トランスを内蔵し、当該ロボットの先端部の先端に設けられている当該ロボットのマウントに溶接ガンのマウントを装着したことを特徴とするスポット溶接用のトランス内蔵型ロボット。
【請求項2】
前記溶接用トランス及び溶接ガンが小型かつ軽量であることを特徴とする請求項1記載のスポット溶接用のトランス内蔵型ロボット。
【請求項1】
溶接ガン、溶接用トランス、加圧機構を有するスポット溶接用ロボットにおいて、
スポット溶接用ロボットの先端部の内部に溶接用トランスを内蔵し、当該ロボットの先端部の先端に設けられている当該ロボットのマウントに溶接ガンのマウントを装着したことを特徴とするスポット溶接用のトランス内蔵型ロボット。
【請求項2】
前記溶接用トランス及び溶接ガンが小型かつ軽量であることを特徴とする請求項1記載のスポット溶接用のトランス内蔵型ロボット。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2008−12565(P2008−12565A)
【公開日】平成20年1月24日(2008.1.24)
【国際特許分類】
【出願番号】特願2006−186270(P2006−186270)
【出願日】平成18年7月6日(2006.7.6)
【出願人】(591146697)愛知産業株式会社 (19)
【Fターム(参考)】
【公開日】平成20年1月24日(2008.1.24)
【国際特許分類】
【出願日】平成18年7月6日(2006.7.6)
【出願人】(591146697)愛知産業株式会社 (19)
【Fターム(参考)】
[ Back to top ]