
スポット溶接装置
【課題】剛性の異なる板材を重ね合わせた被溶接部材をスポット溶接するにあたり、優れた作業効率及び溶接品質が得られるスポット溶接装置を提供する。
【解決手段】可動側電極25を固定側電極15と協働して被溶接部材100に加圧力を付与する加圧位置に移動せしめる加圧力アクチュエータ20と、固定側電極15に隣接して受部39を被溶接部材100に当接して制御加圧力を付与する制御加圧位置に移動せしめる制御加圧力付与アクチュエータ31と、溶接トランス40を有し、溶接ロボットに支持されて支持ブラケット2に前方に加圧力アクチュエータ20を配置し、加圧力アクチュエータ20の後方に制御加圧力付与アクチュエータ31及び溶接トランス40が直線状に配置する。スポット溶接装置1の幅方向寸法が抑制されて小型化されると共に可動側電極25及び固定側電極15の周囲に作業空間が確保される。
【解決手段】可動側電極25を固定側電極15と協働して被溶接部材100に加圧力を付与する加圧位置に移動せしめる加圧力アクチュエータ20と、固定側電極15に隣接して受部39を被溶接部材100に当接して制御加圧力を付与する制御加圧位置に移動せしめる制御加圧力付与アクチュエータ31と、溶接トランス40を有し、溶接ロボットに支持されて支持ブラケット2に前方に加圧力アクチュエータ20を配置し、加圧力アクチュエータ20の後方に制御加圧力付与アクチュエータ31及び溶接トランス40が直線状に配置する。スポット溶接装置1の幅方向寸法が抑制されて小型化されると共に可動側電極25及び固定側電極15の周囲に作業空間が確保される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、剛性の異なる板材を重ね合わせた板組みの被溶接部材をスポット溶接するスポット溶接装置に関する。
【背景技術】
【0002】
一般に、重ね合わされた鋼板等の板材の接合には、一対の溶接電極間で挟み加圧力を与えながら両電極間に一定時間通電するスポット溶接が広く行われる。
【0003】
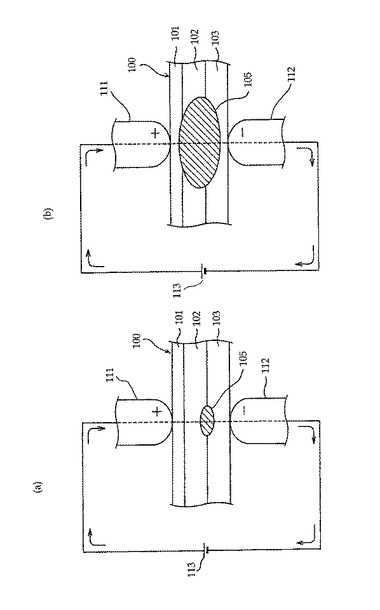
ここで、例えば、図5(a)に示すように、剛性の低い薄板101、この薄板101より剛性が高い第1厚板102、第2厚板103の3枚を重ね合わせた板組の被溶接部材100をスポット溶接する場合には、薄板101と第1厚板102の間及び第1厚板102と第2厚板103の間に隙間がなく密着した状態で、可動側電極111と固定側電極112により被溶接部材100を挟んで電源113により通電すると、可動側電極111と固定側電極112間の通電経路における電流密度がほぼ均一となり薄板101から第2厚板103に亘って良好なナゲットが形成されて、必要な溶接強度を得ることができる。
【0004】
しかし、実際には、可動側電極111と固定側電極112によって被溶接部材100を挟んで加圧したときに、剛性の低い薄板101と第1厚板102が上方に撓んで、薄板101と第1厚板102の間及び第1厚板102と第2厚板103との間に隙間が生じる。
【0005】
この場合、可動側電極111と薄板101間の接触面積は薄板101の撓みにより大きくなるのに対して、薄板101と第1厚板102間及び第1厚板102と第2厚板103間の接合部の接触面積は隙間により小さくなる。このため、可動側電極111と固定側電極112間の電流密度が薄板101側に対して第2厚板103側が高くなり、薄板101と第1厚板102間よりも第1厚板102と第2厚板103間の方が局部的な発熱量が多くなる。
【0006】
その結果、図5(a)に示すように、先ず第1厚板102と第2厚板103との接合部にナゲット105が形成され、次第にナゲット105が大きくなりやがて図5(b)に示すように薄板101と第1厚板102間が溶着される。しかし、この薄板101と第1厚板102との間の溶け込み量が小さく溶接強度が不安定で、薄板101が剥離することが懸念され、かつ溶接品質にバラツキがある。この不具合は、特に第1厚板102及び第2厚板103が厚いほど第1厚板102と薄板101との間にナゲット105が到達しにくく顕著である。
【0007】
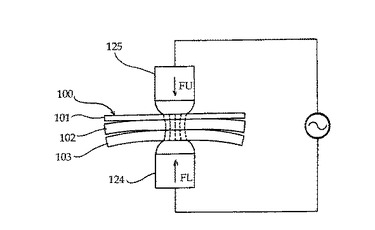
この対策として、例えば特許文献1に開示のスポット溶接方法は、図6に示すように、薄板101、第1厚板102、第2厚板103の3枚重ねの被溶接部材100をスポット溶接するときに、薄板101側の可動側電極125の加圧力FUを、第2厚板103側の固定側電極124の加圧力FLより小さくすることで、薄板101と第1厚板102との接合部の接触抵抗が大きくなる一方、第1厚板102と第2厚板103との接合部の接触抵抗が小さくなり、可動側電極125と固定側電極124間に通電したときに、薄板101と第1厚板102との接合部の発熱量が増加して薄板101と第1厚板102の溶接強度が高められる。
【0008】
この方法の実施に用いられるスポット溶接装置の構成は、図7に示すように、溶接ロボット115の手首部116にスポット溶接装置120が搭載され、溶接ロボット115は、クランパ118によって支持された被溶接部材100の各打点位置にスポット溶接装置120を移動し、被溶接部材100のスポット溶接を行う。
【0009】
スポット溶接装置120は、手首部116に取り付けられた支持ブラケット117に固定されたリニアガイド121によって上下動自在に支持されたベース部122を備え、このベース部122には下方に延びる固定アーム123が設けられ、固定アーム123の先端に固定側電極124が設けられる。
【0010】
また、ベース部122の上端には、加圧力アクチュエータ126が搭載され、加圧力アクチュエータ126により上下動するロッド127の下端に固定側電極124と対向して可動側電極125が取り付けられる。支持ブラケット117の上端にサーボモータ128が搭載され、サーボモータ128の作動によりボールねじ機構を介してベース部122が上下動する。
【0011】
ここで、図示しないコントローラに予め記憶されているティーチングデータに従って、コントローラは、先ず、サーボモータ128によりベース部122を上昇させて固定側電極124を被溶接部材100の下面に当接させると共に、加圧力アクチュエータ126により可動側電極125を下降させて被溶接部材100の上面に当接させる。ここで、加圧力アクチュエータ126による加圧力が可動側電極125と、ベース部122及び固定アーム123を介して固定側電極124とに均等に作用する。
【0012】
次に、サーボモータ128によりベース部122を押し上げる。このベース部122の押し上げにより、固定側電極124の加圧力FLがベース部122の押し上げた分だけ増加し、可動側電極125による加圧力FUが固定側電極124による加圧力FLより小さくなる(FU<FL)。
【0013】
その結果、可動側電極125と固定側電極124との間に通電したときに、薄板101と第1厚板102の接合部における電流密度が高くなり発熱量が第1厚板102と第2厚板103の接合部における発熱量に対して相対的に増加する。これにより、薄板101から第2厚板103に亘って偏りのない良好なナゲットが形成され溶接強度を確保できる。
【先行技術文献】
【特許文献】
【0014】
【特許文献1】特開2003−251469号公報
【発明の概要】
【発明が解決しようとする課題】
【0015】
上記特許文献1によると、クランパ118によってクランプ保持された被溶接部材100の第2厚板103側に固定側電極124を当接させると共に可動側電極125を薄板101に当接させ、更にベース部122を押し上げて固定側電極124の加圧力FLより可動側電極125側の加圧力FUを小さくすることで、相対的に薄板101と第1厚板102間の電流密度が高くなり、薄板101と第1厚板102との接合部における発熱量が確保でき、溶け込み量が増大して溶接強度が増加する。
【0016】
しかし、クランパ118によりクランプ保持された被溶接部材100を固定側電極124と可動側電極125によって挟持加圧した状態でベース部122を移動して固定側電極124の加圧力FLより可動側電極125による加圧力FUを小さくするには、被溶接部材100をクランプ保持するクランパ118に大きな負荷が要求される。一方、クランプ118による被溶接部材100のクランプ位置と溶接位置が大きく離間した状態では、被溶接部材100が撓み変形して固定側電極124による加圧力FLと可動側電極125による加圧力FUにバラツキが生じて安定した薄板101と第1厚板102との間の接触抵抗及び第1厚板102と第2厚板103との間の接触抵抗の確保が困難であり、接合部における電流密度にバラツキが生じてスポット溶接の品質低下が懸念される。
【0017】
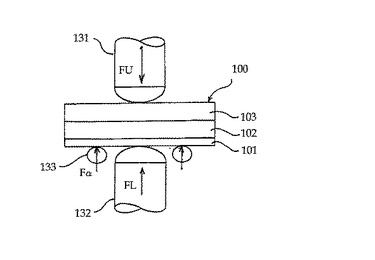
そこで、本特許出願人は、特願2010−200643において、図8に概要を示すように、可動側電極131と固定側電極132との間で被溶接部材100の溶接部を挟持すると共に加圧し、更に図示しない制御加圧力付与アクチュエータにより制御加圧部133を被溶接部材100の薄板101に押圧して制御加圧力Fαを付与することで、薄板101側に作用する固定側電極132の加圧力FLを第2厚板103側に作用する可動側電極131の加圧力FUより小さく(FL<FU)制御して、可動側電極131と固定側電極132との間に所定時間通電して溶接するスポット溶接装置を提案した。
【0018】
このスポット溶接装置は制御加圧力アクチュエータが可動側電極131の近傍に配置されることから、通常のスポット溶接装置よりも幅方向寸法が増大してスポット溶接装置の大型化を招くと共に、可動側電極131及び固定電極132の周辺空間、即ち作動空間が制限されて溶接ロボットによる溶接作業に影響することが懸念される。
【0019】
従って、かかる点に鑑みてなされた本発明の目的は、剛性の異なる板材を重ね合わせた板組みの被溶接部材をスポット溶接するにあたり、優れた作業効率及び溶接品質が得られるスポット溶接装置を提供することにある。
【課題を解決するための手段】
【0020】
上記目的を達成する請求項1に記載の発明によるスポット溶接装置は、第1溶接電極と、該第1溶接電極と対向配置される第2溶接電極を前記第1溶接電極と協働して被溶接部材を挟持して加圧力を付与する加圧位置と前記被溶接部材から離反する退避位置との間で移動せしめる加圧力アクチュエータと、前記第1溶接電極或いは第2溶接電極に隣接して制御加圧部を前記被溶接部材に当接して制御加圧力を付与する制御加圧位置と被溶接部材から離反する退避位置との間で移動せしめる制御加圧力付与アクチュエータと、前記第1溶接電極及び第2溶接電極との間で通電する電源となる溶接トランスとを有するスポット溶接装置であって、溶接ロボットに支持された支持ブラケットを有し、前記支持ブケットの前方に前記加圧力アクチュエータが配置され、該加圧力アクチュエータの後方に前記制御加圧力付与アクチュエータ及び溶接トランスが直線状に配置されことを特徴とする。
【0021】
これによれば、第1溶接電極及び第2溶接電極によって加圧力が付与された被溶接部材に制御加圧力付与アクチュエータにより制御加圧部から制御加圧力が付与されて、第1溶接電極と第2溶接電極による加圧力が制御され、剛性の異なる板材を重ねた被溶接部材に対する溶接品質が向上する。
【0022】
一方、溶接ロボットに支持された支持ブラケットの前方に加圧力アクチュエータを配置し、この加圧力アクチュエータの後方に制御加圧力付与アクチュエータ及び溶接トランスを直線状に配置することで、溶接スポット溶接装置の幅方向寸法が抑制されて小型化されると共に、固定側電極及び可動側電極の前側及び両側が開放されて作業空間が容易に確保され、被溶接部材に対するスポット溶接装置による溶接可能範囲が拡大して溶接品質の向上が得られると共に作業性が向上する。
【0023】
請求項2の発明は、請求項1のスポット溶接装置において、前記支持ブラケットは、前記溶接ロボットに支持されるベース部及び該ベース部から対向して延在する一対の側部を有し、前記加圧力アクチュエータが前記側部の先端部にブラケットを介して配置され、前記制御加圧力付与アクチュエータ及び溶接トランスが前記両側部間に配置されたことを特徴とする。
【0024】
これによると、溶接ロボットに支持される支持ブラケットに加圧力アクチュエータ、制御加圧力付与アクチュエータ及び溶接トランスを確実に保持できる。
【0025】
請求項3の発明は、請求項1または2のスポット溶接装置において、前記制御加圧力付与アクチュエータは、中空モータによって構成されるサーボモータを備え、中空ロータの端部に装着されるボールネジ及びボールネジに螺合するロッドを備えた直動部を有し、該ロッドに前記制御加圧部を有する制御加圧力付与アームが連結されたことを特徴とする。
【0026】
これによると、制御加圧力付与アクチュエータが中空モータによって構成されるサーボモータ及び中空ロータの端部に装着されるボールネジ及びボールネジに螺合するロッドを備えた直動部により構成され、制御加圧力付与アクチュエータの小型化が得られてスポット溶接装置の小型化が容易になる。
【発明の効果】
【0027】
本発明によると、第1溶接電極及び第2溶接電極によって加圧力が付与された被溶接部材に制御加圧力付与アクチュエータによる制御加圧部から制御加圧力が付与されて第1溶接電極と第2溶接電極による加圧力が制御され、剛性の異なる板材を重ねた被溶接部材に対する溶接品質が向上する。
【0028】
一方、溶接ロボットに支持された支持ブラケットの前方に加圧力アクチュエータを配置し、この加圧力アクチュエータの後方に制御加圧力付与アクチュエータ及び溶接トランスを直線状に配置することで、スポット溶接装置の幅方向寸法が抑制されて小型化されると共に、固定側電極及び可動側電極の前側及び両側が開放されて作業空間が確保され、スポット溶接装置による被溶接部材に対する溶接可能範囲が拡大して溶接品質の向上が得られると共に作業性が向上する。
【図面の簡単な説明】
【0029】
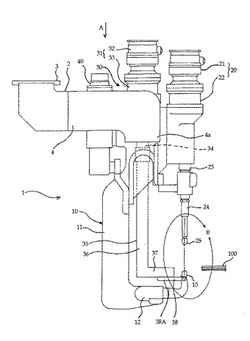
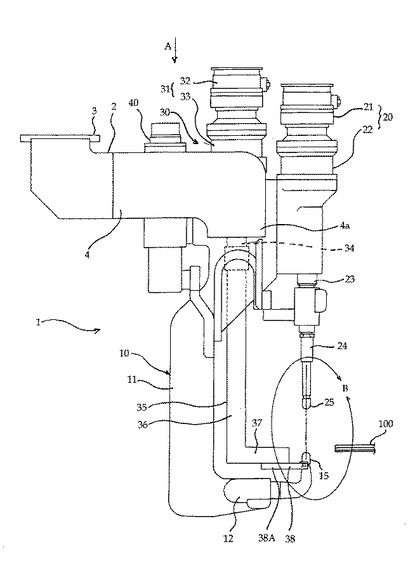
【図1】実施の形態におけるスポット溶接装置の構成図である。
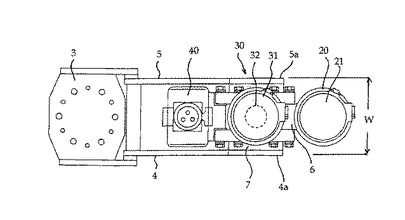
【図2】図1のA矢視図である。
【図3】図1のB部拡大図である。
【図4】模式的に示す作動概要説明図である。
【図5】従来のスポット溶接の概要を示す説明図である。
【図6】従来のスポット溶接の概要を示す説明図である。
【図7】従来のスポット溶接の概要を示す説明図である。
【図8】スポット溶接装置の概要説明図である
【発明を実施するための形態】
【0030】
本発明の実施の形態について、図1乃至図4を参照して説明する。図1はスポット溶接装置の構成図、図2は図1のA矢視図、図3は図1のB部拡大斜視図、図4は模式的に示す作動概要説明図である。
【0031】
スポット溶接装置1の説明に先立って、被溶接部材100について説明する。被溶接部材100は、図3に示すように、重ね合わされた2枚の厚板の一方に薄板を重ね合わせた、下から順に剛性の低い薄板101、薄板より板厚が大きく剛性が高い第1厚板102及び第2厚板103が重ね合わされた3枚重ねの板組によって構成される。
【0032】
スポット溶接装置1は、図示しない溶接ロボットの手首部にイコライザユニットを介して取り付けられる略矩形のベース部3及びベース部3の両側から対向して水平方向に延在する側部4、5を備えた支持ブラケット2を有する。支持ブラケット2の対向する側部4、5に固定アーム10が取り付けられ、側部4、5の先端部4a、5aにブラケット6を介して支持ブラケット2の前方に加圧力アクチュエータ20が取り付けられる。更に、両側部4、5の先端部4a、5a間に制御加圧力付与手段30の制御加圧力付与アクチュエータ31が配置され、側部4,5の略中央部間に溶接トランス40が取り付け支持される。これら加圧力アクチュエータ20、制御加圧力付与アクチュエータ31、溶接トランス30は図2に示すように、加圧力アクチュエータ20が支持ブラケット2の前方に配置され、この加圧力アクチュエータ20の後方に制御加圧力付与アクチュエータ31、溶接トランス30が側部4、5間において直線状に配置される。これら制御加圧力付与アクチュエータ31及び溶接トランス40は両側部4と5との間に挟持されて支持ブラケット2に確実に保持され、加圧力アクチュエータ20がブラケット6を介して支持ブラケット2に結合される。
【0033】
固定アーム10は、支持ブラケット2の両側部4、5に基端が結合されて下方に延在する固定アーム本体11及び固定アーム本体11の先端から前方にL字状に折曲する電極保持部12によって形成され、電極保持部12に第1溶接電極である固定側電極15が、その頂端15aを上方にして装着される。
【0034】
加圧力アクチュエータ20は、モータハウジング内において回転自在に収容される中空ロータを備える中空モータによって構成されるサーボモータ21を備え、中空ロータの端部に装着されるボールネジ及びボールネジに螺合するロッド23を備えた直動部22を有し、サーボモータ21の作動によって直動部22のロッド23が昇降往復動する。この加圧力アクチュエータ20は、サーボモータ21を中空モータによって形成し、かつサーボモータ21と直動部22を同軸上に配置することで比較的小径の円柱状に形成される。
【0035】
直動部22のロッド23の下端に電極アーム24が設けられ、電極アーム24の先端に固定アーム10に設けられた固定側電極15と同軸上、即ち中心軸線L上に固定側電極15と対向して第2溶接電極である可動側電極25が設けられる。これらサーボモータ21、直動部22、電極アーム24及び可動側電極25は中心軸線Lと同軸上に配置される。
【0036】
これにより加圧力アクチュエータ20のサーボモータ21の作動により可動側電極25は固定側電極15から上方に離反する上昇移動端の退避位置と、被溶接部材100を固定側電極15と協働して挟持すると共に被溶接部材100に加圧力を付与する加圧位置との間で中心軸線Lに沿って移動する。この被溶接部材100に対する固定側電極15と可動側電極25による加圧力、即ち固定側電極15による加圧力FL及び可動側電極25による加圧力FUはサーボモータ21の回転トルクによって決定され、サーボモータ21の回転トルクを制御することで所望の加圧力が得られる。
【0037】
制御加圧力付与手段30は、支持ブラケット2の両側部4、5間に支持部材7を介して保持される制御加圧力付与アクチュエータ31及び先端に受部39が設けられた制御加圧力付与アーム35を有する。制御加圧力付与アクチュエータ31は、モータハウジング内において回転自在に収容される中空ロータを備える中空モータによって構成されるサーボモータ32を備え、中空ロータの端部に装着されるボールネジ及びボールネジに螺合するロッド34を備えた直動部33を有し、サーボモータ32の作動によって直動部33のロッド34が昇降往復動する。この直動部33のロッド34に制御加圧力付与アーム35が設けられる。
【0038】
制御加圧力付与アクチュエータ31は、サーボモータ32を中空モータによって形成し、かつサーボモータ32と直動部33を同軸上に配置することで比較的小径の円柱状に形成され、制御加圧力付与アクチュエータ31の小型化が得られてスポット溶接装置1の小型化が容易になる。これらサーボモータ32、直動部33、制御加圧力付与アーム35は、中心軸線Lと平行な同軸上に配置される。
【0039】
制御加圧力付与アーム35は、ロッド34の先端に基端部が結合されてロッド34と同軸上でかつ固定アーム10と電極アーム24との間で下方に延在して先端から中心軸線L方向に折曲する先端部37を有するアーム部36と、アーム部36の先端部37に結合されて中心軸線L方向に延在して先端に加圧力付与部となる受部39が設けられた可動受部38によって構成される。
【0040】
可動受部38は、基端部38Aがアーム部36の先端部37に結合されて中心軸線L方向に向かって延在する矩形板状であって、先端に中心軸線Lと同軸で先端39aが上方に突出して固定側電極15の貫通を許容する断面半円弧状、即ち半割り筒状の受部39が設けられる。これら制御加圧力付与手段30のサーボモータ32、直動部33、制御加圧力付与アーム35は、中心軸線Lと平行な同軸上に配置される。
【0041】
このように構成された制御加圧力付与アーム35は、サーボモータ32の作動によって制御加圧力付与アーム35の先端に設けた受部39の先端39aが固定側電極15の頂端15aより下方となり被溶接部材100から離反する退避位置と、固定側電極15と可動側電極25とによって挟持された被溶接部材100に下方から当接して制御加圧力Fαを付与する制御加圧位置との間で中心軸線Lに沿って移動する。この制御加圧力Fαはサーボモータ32の回転トルクによって決定され、サーボモータ32の回転トルクを制御することで要望の制御加圧力Fαが得られる。
【0042】
電源となる溶接トランス40の一方の出力端子がバスバ及び固定アーム10等を介して固定側電極15に通電可能に接続され、他方の出力端子がバスバ及び電極アーム24等を介して可動側電極25に通電可能に接続される。
【0043】
また、図示しない溶接ロボットコントローラには、溶接ロボットのティーチングデータが格納され、ティーチングデータには、被溶接部材100の各溶接打点位置を順次スポット溶接するための作動プログラム及び各溶接打点、即ち溶接位置におけるスポット溶接装置1の位置及び姿勢が含まれる。図示しない溶接コントローラには溶接装置1の作動プログラム及び加圧アクチュエータ20、制御加圧力付与手段30、溶接トランス40の作動制御が含まれる。
【0044】
このように構成されスポット溶接装置1は、溶接ロボットの手首部にイコライザユニットを介して取り付けられる支持ブラケット2の側部4、5間に先端側からベース部3側に順に加圧力アクチュエータ20を前方として、加圧力アクチュエータ20の後方に制御加圧力付与アクチュエータ31及び溶接トランス40を直線状に配置することで幅方向の寸法Wが抑制されて小型に構成されると共に、固定側電極15及び可動側電極25の前側及び両側が開放され、即ち固定アーム10側を除く広範囲が開放されて作業空間が確保できる。
【0045】
次に、スポット溶接装置1の作動を図4の作動概要説明図を参照して説明する。
【0046】
下から順に薄板101、第1厚板102、第2厚板103が重ね合わされた3枚重ねの板部材からなる被溶接部材100のスポット溶接にあたり、予め設定されたプログラムに従い、図1に示すように可動側電極25が固定側電極15から離反した退避位置でかつ制御加圧力付与手段30の受部39が退避位置に保持された状態で、ロボットコントローラは溶接ロボットを作動し、図4(a)に示すように被溶接部材100の溶接位置となる打点位置に固定側電極15の頂端15aを当接した状態にスポット溶接装置1を位置決めする。
【0047】
ここで、溶接ロボットの手首部にイコライザユニットを介して取り付けられるスポット溶接装置1は、その幅方向寸法Wが抑制されると共に、固定側電極15及び可動側電極25の前側及び両側が開放されて作業空間が容易に確保され、制御加圧力付与アーム35等が被溶接部材100に接触することが回避されて容易に固定側電極15の頂端15aを被溶接部材100の打点位置に当接して位置決めすることができる。また、スポット溶接装置1の姿勢制御の簡素化が可能になり溶接ロボットの作動制御が簡素化されて、溶接ロボットの負荷が軽減される。
【0048】
このスポット溶接1が溶接位置に位置決めされた状態では、図4(a)に示すように固定側電極15の頂端15aが被溶接部材100の薄板101に下方から当接する一方、可動側電極25の頂端25aが第2厚板103と隙間を有して対向し、受部39の先端39aが薄板101と隙間を有して対向する。
【0049】
次に、図4(b)に示すように、固定側電極15が被溶接部材100の薄板101に当接した状態で、加圧力アクチュエータ20のサーボモータ21の作動により可動側電極25を退避位置から固定側電極15に接近する加圧位置方向に移動させて第2厚板103に上方から当接させる。更にサーボモータ21を所定トルクに達するまで作動して可動側電極25を第2厚板103に圧接させる。これにより加圧力アクチュエータ20の加圧力が可動側電極25と固定アーム10を介して固定側電極15とに作用し、可動側電極25と固定側電極15との間で被溶接部材100の溶接部を挟持すると共に加圧する。
【0050】
一方、制御加圧力付与手段30のサーボモータ32の作動により直動部33のロッド34を上昇動して、制御加圧力付与アーム35を介して可動受部38の先端に設けられた受部39を退避位置から先端39aが被溶接部材100の薄板101に固定側電極15に隣接して下方から圧接する制御加圧位置に移動させる。更にサーボモータ32を所定トルクに達するまで作動して受部39を薄板101に圧接させて制御加圧力Fαを付与する。
【0051】
このように固定側電極15と可動側電極25によって被溶接部材100を挟持加圧し、受部39により固定側電極15に隣接して薄板101に下方から制御加圧力Fαを付与した状態では、図4(c)に示すように、可動側電極25による加圧力FUが被溶接部材100の第2厚板103に上方から付与され、固定側電極15による加圧力FLと受部39による制御加圧力Fαが隣接して薄板101に付与される。
【0052】
この場合、図4(c)に模式的に示すように、加圧力アクチュエータ20による加圧力が電極アーム23等を介して可動側電極25に作用し、かつ可動側電極25に対向して固定アーム10を介して固定側電極15に作用する一方、制御加圧力付与手段30においてサーボモータ32による付勢力が制御加圧力付与アーム35等を介して受部39に作用し、第2厚板103に上方から作用する可動側電極25による加圧力FUと薄板101に下方から作用する固定側電極15による加圧力FL及び受部39による制御加圧力Fαの総和が等しくなる(FU=FL+Fα)。
【0053】
これにより、被溶接部材100は、第2厚板103側に上方から作用する可動側電極25からの加圧力FUと、薄板101側に下方から作用する固定側電極15からの加圧力FL及び受部39からの制御加圧力Fαとによって安定した状態で挟持保持される。
【0054】
一方、被溶接部材100の溶接部には、可動側電極25から第2厚板103に加圧力FUが付与され、薄板101に固定側電極15から加圧力FLが付与されると共に受部39から制御加圧力Fαが付与されることから、固定側電極15から薄板101に作用する加圧力FLは、可動側電極25による加圧力FUから受部39による制御加圧力Fαを減じた加圧力が付与される(FL=FU−Fα)。
【0055】
このように薄板101側に作用する固定側電極15からの加圧力FLを第2厚板103側に作用する可動側電極25の加圧力FUより小さく(FL<FU)制御することで、薄板101と第1厚板102の接合部における接触圧力が、第1厚板102と第2厚板103間の溶接部における接触圧力より小さくなり、相対的に薄板101と第1厚板102間の接触抵抗が大きくなると共に、第1厚板102と第2厚板103間の接触抵抗が小さくなる。
【0056】
次に、可動側電極25と固定側電極15及び受部39とで被溶接部材100を挟持加圧して薄板101側に位置する固定側電極15の加圧力FLを第2厚板103側に位置する可動側電極25の加圧力FUより小さくした状態で、溶接トランス40から可動側電極25と固定側電極15との間に所定時間通電して溶接する。
【0057】
この可動側電極25と固定側電極15との間に通電した時に、相対的に薄板101と第1厚板102間の接合部における接触抵抗が大きく電流密度が高くなると共に、第1厚板102と第2厚板103間の接触抵抗が小さく保持される。これにより、薄板101と第1厚板102の接合部における発熱量が第1厚板102と第2厚板103の接合部における発熱量に対して相対的に増加して、薄板101から第2厚板103に亘って電流密度の偏りのない良好なナゲットが形成され、薄板101の溶接強度が確保できる。
【0058】
この溶接が完了した後、制御加圧力付与手段30のサーボモータ32の作動により直動部33のロッド34を下降動して、制御加圧力付与アーム35を介して可動受部38の先端に設けられた受部39を被溶接部材100に圧接する制御加圧位置から退避位置に移動させる。更に、加圧力アクチュエータ20のサーボモータ21の作動により可動側電極25を加圧位置から退避位置に移動させて固定側電極15と可動側電極25とによる被溶接部材100の挟持を開放する。
【0059】
次に、作動プログラムに従い溶接ロボットを作動して、スポット溶接装置1を被溶接部材100の打点位置から退避させ、次の被溶接部材100の打点位置に移動する。
【0060】
このように構成された本実施の形態によると、固定側電極15及び可動側電極25によって加圧力が付与された被溶接部材100に制御加圧力付与アクチュエータ31による制御加圧力が付与されて、固定側電極15と可動側電極25による加圧力FL、FUが制御され、剛性の異なる板材を重ねた被溶接部材100に対する溶接品質が向上する。
【0061】
一方、溶接ロボットの手首部にイコライザユニットを介して取り付けられる支持ブラケット2の前方に加圧力アクチュエータ20を配置し、加圧アクチュエータ20に対して制御加圧力アクチュエータ31及び溶接トランス40を後方に直線状に配置することでスポット溶接装置1の幅方向寸法Wが抑制されて小型化され、かつ固定側電極15及び可動側電極25の前側及び両側が開放されて作業空間が容易に確保されて被溶接部材に対する溶接可能範囲が拡大して溶接品質の向上が得られる。
【0062】
更に、スポット溶接装置1が小型化されると共に、固定側電極15及び可動側電極25の前側及び両側が開放されて作業空間が確保されることから、スポット溶接装置1の姿勢制御が容易になり溶接ロボットの作動制御が簡素化され、溶接ロボットの負荷が軽減できる。また、複数の溶接ロボットを使用する場合には、他の溶接ロボットと干渉が低減され、他の溶接ロボットとの同時作業が可能になり、作業効率の向上が得られる。
【0063】
なお、本発明は上記実施の形態に限定されることなく発明の趣旨を逸脱しない範囲で種々変更可能である。例えば、上記実施の形態では前方から加圧力アクチュエータ20、制御加圧力付与アクチュエータ31及び溶接トランス40を順に直線状に配置したが、加圧アクチュエータ20の後方に順に溶接トランス40,制御加圧力アクチュエータ31を直線状に配置することもできる。
【0064】
また、被溶接部材100に対して固定側電極15と同方向から受部39により制御加圧力を付与する場合につて説明したが、可動側電極25と同方向から制御加圧力を付与するスポット溶接装置に適用することもできる。
【符号の説明】
【0065】
1 スポット溶接装置
2 支持ブラケット
10 固定アーム
12 電極保持部
15 固定側電極(第1溶接電極)
20 加圧力アクチュエータ
21 サーボモータ
24 電極アーム
25 可動側電極(第2溶接電極)
30 制御加圧力付与手段
31 制御加圧力付与アクチュエータ
32 サーボモータ
33 直動部
34 ロッド
35 制御加圧力付与アーム
39 受部(制御加圧部)
40 溶接トランス
100 被溶接部材
【技術分野】
【0001】
本発明は、剛性の異なる板材を重ね合わせた板組みの被溶接部材をスポット溶接するスポット溶接装置に関する。
【背景技術】
【0002】
一般に、重ね合わされた鋼板等の板材の接合には、一対の溶接電極間で挟み加圧力を与えながら両電極間に一定時間通電するスポット溶接が広く行われる。
【0003】
ここで、例えば、図5(a)に示すように、剛性の低い薄板101、この薄板101より剛性が高い第1厚板102、第2厚板103の3枚を重ね合わせた板組の被溶接部材100をスポット溶接する場合には、薄板101と第1厚板102の間及び第1厚板102と第2厚板103の間に隙間がなく密着した状態で、可動側電極111と固定側電極112により被溶接部材100を挟んで電源113により通電すると、可動側電極111と固定側電極112間の通電経路における電流密度がほぼ均一となり薄板101から第2厚板103に亘って良好なナゲットが形成されて、必要な溶接強度を得ることができる。
【0004】
しかし、実際には、可動側電極111と固定側電極112によって被溶接部材100を挟んで加圧したときに、剛性の低い薄板101と第1厚板102が上方に撓んで、薄板101と第1厚板102の間及び第1厚板102と第2厚板103との間に隙間が生じる。
【0005】
この場合、可動側電極111と薄板101間の接触面積は薄板101の撓みにより大きくなるのに対して、薄板101と第1厚板102間及び第1厚板102と第2厚板103間の接合部の接触面積は隙間により小さくなる。このため、可動側電極111と固定側電極112間の電流密度が薄板101側に対して第2厚板103側が高くなり、薄板101と第1厚板102間よりも第1厚板102と第2厚板103間の方が局部的な発熱量が多くなる。
【0006】
その結果、図5(a)に示すように、先ず第1厚板102と第2厚板103との接合部にナゲット105が形成され、次第にナゲット105が大きくなりやがて図5(b)に示すように薄板101と第1厚板102間が溶着される。しかし、この薄板101と第1厚板102との間の溶け込み量が小さく溶接強度が不安定で、薄板101が剥離することが懸念され、かつ溶接品質にバラツキがある。この不具合は、特に第1厚板102及び第2厚板103が厚いほど第1厚板102と薄板101との間にナゲット105が到達しにくく顕著である。
【0007】
この対策として、例えば特許文献1に開示のスポット溶接方法は、図6に示すように、薄板101、第1厚板102、第2厚板103の3枚重ねの被溶接部材100をスポット溶接するときに、薄板101側の可動側電極125の加圧力FUを、第2厚板103側の固定側電極124の加圧力FLより小さくすることで、薄板101と第1厚板102との接合部の接触抵抗が大きくなる一方、第1厚板102と第2厚板103との接合部の接触抵抗が小さくなり、可動側電極125と固定側電極124間に通電したときに、薄板101と第1厚板102との接合部の発熱量が増加して薄板101と第1厚板102の溶接強度が高められる。
【0008】
この方法の実施に用いられるスポット溶接装置の構成は、図7に示すように、溶接ロボット115の手首部116にスポット溶接装置120が搭載され、溶接ロボット115は、クランパ118によって支持された被溶接部材100の各打点位置にスポット溶接装置120を移動し、被溶接部材100のスポット溶接を行う。
【0009】
スポット溶接装置120は、手首部116に取り付けられた支持ブラケット117に固定されたリニアガイド121によって上下動自在に支持されたベース部122を備え、このベース部122には下方に延びる固定アーム123が設けられ、固定アーム123の先端に固定側電極124が設けられる。
【0010】
また、ベース部122の上端には、加圧力アクチュエータ126が搭載され、加圧力アクチュエータ126により上下動するロッド127の下端に固定側電極124と対向して可動側電極125が取り付けられる。支持ブラケット117の上端にサーボモータ128が搭載され、サーボモータ128の作動によりボールねじ機構を介してベース部122が上下動する。
【0011】
ここで、図示しないコントローラに予め記憶されているティーチングデータに従って、コントローラは、先ず、サーボモータ128によりベース部122を上昇させて固定側電極124を被溶接部材100の下面に当接させると共に、加圧力アクチュエータ126により可動側電極125を下降させて被溶接部材100の上面に当接させる。ここで、加圧力アクチュエータ126による加圧力が可動側電極125と、ベース部122及び固定アーム123を介して固定側電極124とに均等に作用する。
【0012】
次に、サーボモータ128によりベース部122を押し上げる。このベース部122の押し上げにより、固定側電極124の加圧力FLがベース部122の押し上げた分だけ増加し、可動側電極125による加圧力FUが固定側電極124による加圧力FLより小さくなる(FU<FL)。
【0013】
その結果、可動側電極125と固定側電極124との間に通電したときに、薄板101と第1厚板102の接合部における電流密度が高くなり発熱量が第1厚板102と第2厚板103の接合部における発熱量に対して相対的に増加する。これにより、薄板101から第2厚板103に亘って偏りのない良好なナゲットが形成され溶接強度を確保できる。
【先行技術文献】
【特許文献】
【0014】
【特許文献1】特開2003−251469号公報
【発明の概要】
【発明が解決しようとする課題】
【0015】
上記特許文献1によると、クランパ118によってクランプ保持された被溶接部材100の第2厚板103側に固定側電極124を当接させると共に可動側電極125を薄板101に当接させ、更にベース部122を押し上げて固定側電極124の加圧力FLより可動側電極125側の加圧力FUを小さくすることで、相対的に薄板101と第1厚板102間の電流密度が高くなり、薄板101と第1厚板102との接合部における発熱量が確保でき、溶け込み量が増大して溶接強度が増加する。
【0016】
しかし、クランパ118によりクランプ保持された被溶接部材100を固定側電極124と可動側電極125によって挟持加圧した状態でベース部122を移動して固定側電極124の加圧力FLより可動側電極125による加圧力FUを小さくするには、被溶接部材100をクランプ保持するクランパ118に大きな負荷が要求される。一方、クランプ118による被溶接部材100のクランプ位置と溶接位置が大きく離間した状態では、被溶接部材100が撓み変形して固定側電極124による加圧力FLと可動側電極125による加圧力FUにバラツキが生じて安定した薄板101と第1厚板102との間の接触抵抗及び第1厚板102と第2厚板103との間の接触抵抗の確保が困難であり、接合部における電流密度にバラツキが生じてスポット溶接の品質低下が懸念される。
【0017】
そこで、本特許出願人は、特願2010−200643において、図8に概要を示すように、可動側電極131と固定側電極132との間で被溶接部材100の溶接部を挟持すると共に加圧し、更に図示しない制御加圧力付与アクチュエータにより制御加圧部133を被溶接部材100の薄板101に押圧して制御加圧力Fαを付与することで、薄板101側に作用する固定側電極132の加圧力FLを第2厚板103側に作用する可動側電極131の加圧力FUより小さく(FL<FU)制御して、可動側電極131と固定側電極132との間に所定時間通電して溶接するスポット溶接装置を提案した。
【0018】
このスポット溶接装置は制御加圧力アクチュエータが可動側電極131の近傍に配置されることから、通常のスポット溶接装置よりも幅方向寸法が増大してスポット溶接装置の大型化を招くと共に、可動側電極131及び固定電極132の周辺空間、即ち作動空間が制限されて溶接ロボットによる溶接作業に影響することが懸念される。
【0019】
従って、かかる点に鑑みてなされた本発明の目的は、剛性の異なる板材を重ね合わせた板組みの被溶接部材をスポット溶接するにあたり、優れた作業効率及び溶接品質が得られるスポット溶接装置を提供することにある。
【課題を解決するための手段】
【0020】
上記目的を達成する請求項1に記載の発明によるスポット溶接装置は、第1溶接電極と、該第1溶接電極と対向配置される第2溶接電極を前記第1溶接電極と協働して被溶接部材を挟持して加圧力を付与する加圧位置と前記被溶接部材から離反する退避位置との間で移動せしめる加圧力アクチュエータと、前記第1溶接電極或いは第2溶接電極に隣接して制御加圧部を前記被溶接部材に当接して制御加圧力を付与する制御加圧位置と被溶接部材から離反する退避位置との間で移動せしめる制御加圧力付与アクチュエータと、前記第1溶接電極及び第2溶接電極との間で通電する電源となる溶接トランスとを有するスポット溶接装置であって、溶接ロボットに支持された支持ブラケットを有し、前記支持ブケットの前方に前記加圧力アクチュエータが配置され、該加圧力アクチュエータの後方に前記制御加圧力付与アクチュエータ及び溶接トランスが直線状に配置されことを特徴とする。
【0021】
これによれば、第1溶接電極及び第2溶接電極によって加圧力が付与された被溶接部材に制御加圧力付与アクチュエータにより制御加圧部から制御加圧力が付与されて、第1溶接電極と第2溶接電極による加圧力が制御され、剛性の異なる板材を重ねた被溶接部材に対する溶接品質が向上する。
【0022】
一方、溶接ロボットに支持された支持ブラケットの前方に加圧力アクチュエータを配置し、この加圧力アクチュエータの後方に制御加圧力付与アクチュエータ及び溶接トランスを直線状に配置することで、溶接スポット溶接装置の幅方向寸法が抑制されて小型化されると共に、固定側電極及び可動側電極の前側及び両側が開放されて作業空間が容易に確保され、被溶接部材に対するスポット溶接装置による溶接可能範囲が拡大して溶接品質の向上が得られると共に作業性が向上する。
【0023】
請求項2の発明は、請求項1のスポット溶接装置において、前記支持ブラケットは、前記溶接ロボットに支持されるベース部及び該ベース部から対向して延在する一対の側部を有し、前記加圧力アクチュエータが前記側部の先端部にブラケットを介して配置され、前記制御加圧力付与アクチュエータ及び溶接トランスが前記両側部間に配置されたことを特徴とする。
【0024】
これによると、溶接ロボットに支持される支持ブラケットに加圧力アクチュエータ、制御加圧力付与アクチュエータ及び溶接トランスを確実に保持できる。
【0025】
請求項3の発明は、請求項1または2のスポット溶接装置において、前記制御加圧力付与アクチュエータは、中空モータによって構成されるサーボモータを備え、中空ロータの端部に装着されるボールネジ及びボールネジに螺合するロッドを備えた直動部を有し、該ロッドに前記制御加圧部を有する制御加圧力付与アームが連結されたことを特徴とする。
【0026】
これによると、制御加圧力付与アクチュエータが中空モータによって構成されるサーボモータ及び中空ロータの端部に装着されるボールネジ及びボールネジに螺合するロッドを備えた直動部により構成され、制御加圧力付与アクチュエータの小型化が得られてスポット溶接装置の小型化が容易になる。
【発明の効果】
【0027】
本発明によると、第1溶接電極及び第2溶接電極によって加圧力が付与された被溶接部材に制御加圧力付与アクチュエータによる制御加圧部から制御加圧力が付与されて第1溶接電極と第2溶接電極による加圧力が制御され、剛性の異なる板材を重ねた被溶接部材に対する溶接品質が向上する。
【0028】
一方、溶接ロボットに支持された支持ブラケットの前方に加圧力アクチュエータを配置し、この加圧力アクチュエータの後方に制御加圧力付与アクチュエータ及び溶接トランスを直線状に配置することで、スポット溶接装置の幅方向寸法が抑制されて小型化されると共に、固定側電極及び可動側電極の前側及び両側が開放されて作業空間が確保され、スポット溶接装置による被溶接部材に対する溶接可能範囲が拡大して溶接品質の向上が得られると共に作業性が向上する。
【図面の簡単な説明】
【0029】
【図1】実施の形態におけるスポット溶接装置の構成図である。
【図2】図1のA矢視図である。
【図3】図1のB部拡大図である。
【図4】模式的に示す作動概要説明図である。
【図5】従来のスポット溶接の概要を示す説明図である。
【図6】従来のスポット溶接の概要を示す説明図である。
【図7】従来のスポット溶接の概要を示す説明図である。
【図8】スポット溶接装置の概要説明図である
【発明を実施するための形態】
【0030】
本発明の実施の形態について、図1乃至図4を参照して説明する。図1はスポット溶接装置の構成図、図2は図1のA矢視図、図3は図1のB部拡大斜視図、図4は模式的に示す作動概要説明図である。
【0031】
スポット溶接装置1の説明に先立って、被溶接部材100について説明する。被溶接部材100は、図3に示すように、重ね合わされた2枚の厚板の一方に薄板を重ね合わせた、下から順に剛性の低い薄板101、薄板より板厚が大きく剛性が高い第1厚板102及び第2厚板103が重ね合わされた3枚重ねの板組によって構成される。
【0032】
スポット溶接装置1は、図示しない溶接ロボットの手首部にイコライザユニットを介して取り付けられる略矩形のベース部3及びベース部3の両側から対向して水平方向に延在する側部4、5を備えた支持ブラケット2を有する。支持ブラケット2の対向する側部4、5に固定アーム10が取り付けられ、側部4、5の先端部4a、5aにブラケット6を介して支持ブラケット2の前方に加圧力アクチュエータ20が取り付けられる。更に、両側部4、5の先端部4a、5a間に制御加圧力付与手段30の制御加圧力付与アクチュエータ31が配置され、側部4,5の略中央部間に溶接トランス40が取り付け支持される。これら加圧力アクチュエータ20、制御加圧力付与アクチュエータ31、溶接トランス30は図2に示すように、加圧力アクチュエータ20が支持ブラケット2の前方に配置され、この加圧力アクチュエータ20の後方に制御加圧力付与アクチュエータ31、溶接トランス30が側部4、5間において直線状に配置される。これら制御加圧力付与アクチュエータ31及び溶接トランス40は両側部4と5との間に挟持されて支持ブラケット2に確実に保持され、加圧力アクチュエータ20がブラケット6を介して支持ブラケット2に結合される。
【0033】
固定アーム10は、支持ブラケット2の両側部4、5に基端が結合されて下方に延在する固定アーム本体11及び固定アーム本体11の先端から前方にL字状に折曲する電極保持部12によって形成され、電極保持部12に第1溶接電極である固定側電極15が、その頂端15aを上方にして装着される。
【0034】
加圧力アクチュエータ20は、モータハウジング内において回転自在に収容される中空ロータを備える中空モータによって構成されるサーボモータ21を備え、中空ロータの端部に装着されるボールネジ及びボールネジに螺合するロッド23を備えた直動部22を有し、サーボモータ21の作動によって直動部22のロッド23が昇降往復動する。この加圧力アクチュエータ20は、サーボモータ21を中空モータによって形成し、かつサーボモータ21と直動部22を同軸上に配置することで比較的小径の円柱状に形成される。
【0035】
直動部22のロッド23の下端に電極アーム24が設けられ、電極アーム24の先端に固定アーム10に設けられた固定側電極15と同軸上、即ち中心軸線L上に固定側電極15と対向して第2溶接電極である可動側電極25が設けられる。これらサーボモータ21、直動部22、電極アーム24及び可動側電極25は中心軸線Lと同軸上に配置される。
【0036】
これにより加圧力アクチュエータ20のサーボモータ21の作動により可動側電極25は固定側電極15から上方に離反する上昇移動端の退避位置と、被溶接部材100を固定側電極15と協働して挟持すると共に被溶接部材100に加圧力を付与する加圧位置との間で中心軸線Lに沿って移動する。この被溶接部材100に対する固定側電極15と可動側電極25による加圧力、即ち固定側電極15による加圧力FL及び可動側電極25による加圧力FUはサーボモータ21の回転トルクによって決定され、サーボモータ21の回転トルクを制御することで所望の加圧力が得られる。
【0037】
制御加圧力付与手段30は、支持ブラケット2の両側部4、5間に支持部材7を介して保持される制御加圧力付与アクチュエータ31及び先端に受部39が設けられた制御加圧力付与アーム35を有する。制御加圧力付与アクチュエータ31は、モータハウジング内において回転自在に収容される中空ロータを備える中空モータによって構成されるサーボモータ32を備え、中空ロータの端部に装着されるボールネジ及びボールネジに螺合するロッド34を備えた直動部33を有し、サーボモータ32の作動によって直動部33のロッド34が昇降往復動する。この直動部33のロッド34に制御加圧力付与アーム35が設けられる。
【0038】
制御加圧力付与アクチュエータ31は、サーボモータ32を中空モータによって形成し、かつサーボモータ32と直動部33を同軸上に配置することで比較的小径の円柱状に形成され、制御加圧力付与アクチュエータ31の小型化が得られてスポット溶接装置1の小型化が容易になる。これらサーボモータ32、直動部33、制御加圧力付与アーム35は、中心軸線Lと平行な同軸上に配置される。
【0039】
制御加圧力付与アーム35は、ロッド34の先端に基端部が結合されてロッド34と同軸上でかつ固定アーム10と電極アーム24との間で下方に延在して先端から中心軸線L方向に折曲する先端部37を有するアーム部36と、アーム部36の先端部37に結合されて中心軸線L方向に延在して先端に加圧力付与部となる受部39が設けられた可動受部38によって構成される。
【0040】
可動受部38は、基端部38Aがアーム部36の先端部37に結合されて中心軸線L方向に向かって延在する矩形板状であって、先端に中心軸線Lと同軸で先端39aが上方に突出して固定側電極15の貫通を許容する断面半円弧状、即ち半割り筒状の受部39が設けられる。これら制御加圧力付与手段30のサーボモータ32、直動部33、制御加圧力付与アーム35は、中心軸線Lと平行な同軸上に配置される。
【0041】
このように構成された制御加圧力付与アーム35は、サーボモータ32の作動によって制御加圧力付与アーム35の先端に設けた受部39の先端39aが固定側電極15の頂端15aより下方となり被溶接部材100から離反する退避位置と、固定側電極15と可動側電極25とによって挟持された被溶接部材100に下方から当接して制御加圧力Fαを付与する制御加圧位置との間で中心軸線Lに沿って移動する。この制御加圧力Fαはサーボモータ32の回転トルクによって決定され、サーボモータ32の回転トルクを制御することで要望の制御加圧力Fαが得られる。
【0042】
電源となる溶接トランス40の一方の出力端子がバスバ及び固定アーム10等を介して固定側電極15に通電可能に接続され、他方の出力端子がバスバ及び電極アーム24等を介して可動側電極25に通電可能に接続される。
【0043】
また、図示しない溶接ロボットコントローラには、溶接ロボットのティーチングデータが格納され、ティーチングデータには、被溶接部材100の各溶接打点位置を順次スポット溶接するための作動プログラム及び各溶接打点、即ち溶接位置におけるスポット溶接装置1の位置及び姿勢が含まれる。図示しない溶接コントローラには溶接装置1の作動プログラム及び加圧アクチュエータ20、制御加圧力付与手段30、溶接トランス40の作動制御が含まれる。
【0044】
このように構成されスポット溶接装置1は、溶接ロボットの手首部にイコライザユニットを介して取り付けられる支持ブラケット2の側部4、5間に先端側からベース部3側に順に加圧力アクチュエータ20を前方として、加圧力アクチュエータ20の後方に制御加圧力付与アクチュエータ31及び溶接トランス40を直線状に配置することで幅方向の寸法Wが抑制されて小型に構成されると共に、固定側電極15及び可動側電極25の前側及び両側が開放され、即ち固定アーム10側を除く広範囲が開放されて作業空間が確保できる。
【0045】
次に、スポット溶接装置1の作動を図4の作動概要説明図を参照して説明する。
【0046】
下から順に薄板101、第1厚板102、第2厚板103が重ね合わされた3枚重ねの板部材からなる被溶接部材100のスポット溶接にあたり、予め設定されたプログラムに従い、図1に示すように可動側電極25が固定側電極15から離反した退避位置でかつ制御加圧力付与手段30の受部39が退避位置に保持された状態で、ロボットコントローラは溶接ロボットを作動し、図4(a)に示すように被溶接部材100の溶接位置となる打点位置に固定側電極15の頂端15aを当接した状態にスポット溶接装置1を位置決めする。
【0047】
ここで、溶接ロボットの手首部にイコライザユニットを介して取り付けられるスポット溶接装置1は、その幅方向寸法Wが抑制されると共に、固定側電極15及び可動側電極25の前側及び両側が開放されて作業空間が容易に確保され、制御加圧力付与アーム35等が被溶接部材100に接触することが回避されて容易に固定側電極15の頂端15aを被溶接部材100の打点位置に当接して位置決めすることができる。また、スポット溶接装置1の姿勢制御の簡素化が可能になり溶接ロボットの作動制御が簡素化されて、溶接ロボットの負荷が軽減される。
【0048】
このスポット溶接1が溶接位置に位置決めされた状態では、図4(a)に示すように固定側電極15の頂端15aが被溶接部材100の薄板101に下方から当接する一方、可動側電極25の頂端25aが第2厚板103と隙間を有して対向し、受部39の先端39aが薄板101と隙間を有して対向する。
【0049】
次に、図4(b)に示すように、固定側電極15が被溶接部材100の薄板101に当接した状態で、加圧力アクチュエータ20のサーボモータ21の作動により可動側電極25を退避位置から固定側電極15に接近する加圧位置方向に移動させて第2厚板103に上方から当接させる。更にサーボモータ21を所定トルクに達するまで作動して可動側電極25を第2厚板103に圧接させる。これにより加圧力アクチュエータ20の加圧力が可動側電極25と固定アーム10を介して固定側電極15とに作用し、可動側電極25と固定側電極15との間で被溶接部材100の溶接部を挟持すると共に加圧する。
【0050】
一方、制御加圧力付与手段30のサーボモータ32の作動により直動部33のロッド34を上昇動して、制御加圧力付与アーム35を介して可動受部38の先端に設けられた受部39を退避位置から先端39aが被溶接部材100の薄板101に固定側電極15に隣接して下方から圧接する制御加圧位置に移動させる。更にサーボモータ32を所定トルクに達するまで作動して受部39を薄板101に圧接させて制御加圧力Fαを付与する。
【0051】
このように固定側電極15と可動側電極25によって被溶接部材100を挟持加圧し、受部39により固定側電極15に隣接して薄板101に下方から制御加圧力Fαを付与した状態では、図4(c)に示すように、可動側電極25による加圧力FUが被溶接部材100の第2厚板103に上方から付与され、固定側電極15による加圧力FLと受部39による制御加圧力Fαが隣接して薄板101に付与される。
【0052】
この場合、図4(c)に模式的に示すように、加圧力アクチュエータ20による加圧力が電極アーム23等を介して可動側電極25に作用し、かつ可動側電極25に対向して固定アーム10を介して固定側電極15に作用する一方、制御加圧力付与手段30においてサーボモータ32による付勢力が制御加圧力付与アーム35等を介して受部39に作用し、第2厚板103に上方から作用する可動側電極25による加圧力FUと薄板101に下方から作用する固定側電極15による加圧力FL及び受部39による制御加圧力Fαの総和が等しくなる(FU=FL+Fα)。
【0053】
これにより、被溶接部材100は、第2厚板103側に上方から作用する可動側電極25からの加圧力FUと、薄板101側に下方から作用する固定側電極15からの加圧力FL及び受部39からの制御加圧力Fαとによって安定した状態で挟持保持される。
【0054】
一方、被溶接部材100の溶接部には、可動側電極25から第2厚板103に加圧力FUが付与され、薄板101に固定側電極15から加圧力FLが付与されると共に受部39から制御加圧力Fαが付与されることから、固定側電極15から薄板101に作用する加圧力FLは、可動側電極25による加圧力FUから受部39による制御加圧力Fαを減じた加圧力が付与される(FL=FU−Fα)。
【0055】
このように薄板101側に作用する固定側電極15からの加圧力FLを第2厚板103側に作用する可動側電極25の加圧力FUより小さく(FL<FU)制御することで、薄板101と第1厚板102の接合部における接触圧力が、第1厚板102と第2厚板103間の溶接部における接触圧力より小さくなり、相対的に薄板101と第1厚板102間の接触抵抗が大きくなると共に、第1厚板102と第2厚板103間の接触抵抗が小さくなる。
【0056】
次に、可動側電極25と固定側電極15及び受部39とで被溶接部材100を挟持加圧して薄板101側に位置する固定側電極15の加圧力FLを第2厚板103側に位置する可動側電極25の加圧力FUより小さくした状態で、溶接トランス40から可動側電極25と固定側電極15との間に所定時間通電して溶接する。
【0057】
この可動側電極25と固定側電極15との間に通電した時に、相対的に薄板101と第1厚板102間の接合部における接触抵抗が大きく電流密度が高くなると共に、第1厚板102と第2厚板103間の接触抵抗が小さく保持される。これにより、薄板101と第1厚板102の接合部における発熱量が第1厚板102と第2厚板103の接合部における発熱量に対して相対的に増加して、薄板101から第2厚板103に亘って電流密度の偏りのない良好なナゲットが形成され、薄板101の溶接強度が確保できる。
【0058】
この溶接が完了した後、制御加圧力付与手段30のサーボモータ32の作動により直動部33のロッド34を下降動して、制御加圧力付与アーム35を介して可動受部38の先端に設けられた受部39を被溶接部材100に圧接する制御加圧位置から退避位置に移動させる。更に、加圧力アクチュエータ20のサーボモータ21の作動により可動側電極25を加圧位置から退避位置に移動させて固定側電極15と可動側電極25とによる被溶接部材100の挟持を開放する。
【0059】
次に、作動プログラムに従い溶接ロボットを作動して、スポット溶接装置1を被溶接部材100の打点位置から退避させ、次の被溶接部材100の打点位置に移動する。
【0060】
このように構成された本実施の形態によると、固定側電極15及び可動側電極25によって加圧力が付与された被溶接部材100に制御加圧力付与アクチュエータ31による制御加圧力が付与されて、固定側電極15と可動側電極25による加圧力FL、FUが制御され、剛性の異なる板材を重ねた被溶接部材100に対する溶接品質が向上する。
【0061】
一方、溶接ロボットの手首部にイコライザユニットを介して取り付けられる支持ブラケット2の前方に加圧力アクチュエータ20を配置し、加圧アクチュエータ20に対して制御加圧力アクチュエータ31及び溶接トランス40を後方に直線状に配置することでスポット溶接装置1の幅方向寸法Wが抑制されて小型化され、かつ固定側電極15及び可動側電極25の前側及び両側が開放されて作業空間が容易に確保されて被溶接部材に対する溶接可能範囲が拡大して溶接品質の向上が得られる。
【0062】
更に、スポット溶接装置1が小型化されると共に、固定側電極15及び可動側電極25の前側及び両側が開放されて作業空間が確保されることから、スポット溶接装置1の姿勢制御が容易になり溶接ロボットの作動制御が簡素化され、溶接ロボットの負荷が軽減できる。また、複数の溶接ロボットを使用する場合には、他の溶接ロボットと干渉が低減され、他の溶接ロボットとの同時作業が可能になり、作業効率の向上が得られる。
【0063】
なお、本発明は上記実施の形態に限定されることなく発明の趣旨を逸脱しない範囲で種々変更可能である。例えば、上記実施の形態では前方から加圧力アクチュエータ20、制御加圧力付与アクチュエータ31及び溶接トランス40を順に直線状に配置したが、加圧アクチュエータ20の後方に順に溶接トランス40,制御加圧力アクチュエータ31を直線状に配置することもできる。
【0064】
また、被溶接部材100に対して固定側電極15と同方向から受部39により制御加圧力を付与する場合につて説明したが、可動側電極25と同方向から制御加圧力を付与するスポット溶接装置に適用することもできる。
【符号の説明】
【0065】
1 スポット溶接装置
2 支持ブラケット
10 固定アーム
12 電極保持部
15 固定側電極(第1溶接電極)
20 加圧力アクチュエータ
21 サーボモータ
24 電極アーム
25 可動側電極(第2溶接電極)
30 制御加圧力付与手段
31 制御加圧力付与アクチュエータ
32 サーボモータ
33 直動部
34 ロッド
35 制御加圧力付与アーム
39 受部(制御加圧部)
40 溶接トランス
100 被溶接部材
【特許請求の範囲】
【請求項1】
第1溶接電極と、
該第1溶接電極と対向配置される第2溶接電極を前記第1溶接電極と協働して被溶接部材を挟持して加圧力を付与する加圧位置と前記被溶接部材から離反する退避位置との間で移動せしめる加圧力アクチュエータと、
前記第1溶接電極或いは第2溶接電極に隣接して制御加圧部を前記被溶接部材に当接して制御加圧力を付与する制御加圧位置と被溶接部材から離反する退避位置との間で移動せしめる制御加圧力付与アクチュエータと、
前記第1溶接電極及び第2溶接電極との間で通電する電源となる溶接トランスとを有するスポット溶接装置であって、
溶接ロボットに支持された支持ブラケットを有し、
前記支持ブケットの前方に前記加圧力アクチュエータが配置され、該加圧力アクチュエータの後方に前記制御加圧力付与アクチュエータ及び溶接トランスが直線状に配置されことを特徴とするスポット溶接装置。
【請求項2】
前記支持ブラケットは、
前記溶接ロボットに支持されるベース部及び該ベース部から対向して延在する一対の側部を有し、
前記加圧力アクチュエータが前記側部の先端部にブラケットを介して配置され、
前記制御加圧力付与アクチュエータ及び溶接トランスが前記両側部間に配置されたことを特徴とする請求項1に記載のスポット溶接装置。
【請求項3】
前記制御加圧力付与アクチュエータは、
中空モータによって構成されるサーボモータを備え、中空ロータの端部に装着されるボールネジ及びボールネジに螺合するロッドを備えた直動部を有し、該ロッドに前記制御加圧部を有する制御加圧力付与アームが連結されたことを特徴とする請求項1または2に記載のスポット溶接装置。
【請求項1】
第1溶接電極と、
該第1溶接電極と対向配置される第2溶接電極を前記第1溶接電極と協働して被溶接部材を挟持して加圧力を付与する加圧位置と前記被溶接部材から離反する退避位置との間で移動せしめる加圧力アクチュエータと、
前記第1溶接電極或いは第2溶接電極に隣接して制御加圧部を前記被溶接部材に当接して制御加圧力を付与する制御加圧位置と被溶接部材から離反する退避位置との間で移動せしめる制御加圧力付与アクチュエータと、
前記第1溶接電極及び第2溶接電極との間で通電する電源となる溶接トランスとを有するスポット溶接装置であって、
溶接ロボットに支持された支持ブラケットを有し、
前記支持ブケットの前方に前記加圧力アクチュエータが配置され、該加圧力アクチュエータの後方に前記制御加圧力付与アクチュエータ及び溶接トランスが直線状に配置されことを特徴とするスポット溶接装置。
【請求項2】
前記支持ブラケットは、
前記溶接ロボットに支持されるベース部及び該ベース部から対向して延在する一対の側部を有し、
前記加圧力アクチュエータが前記側部の先端部にブラケットを介して配置され、
前記制御加圧力付与アクチュエータ及び溶接トランスが前記両側部間に配置されたことを特徴とする請求項1に記載のスポット溶接装置。
【請求項3】
前記制御加圧力付与アクチュエータは、
中空モータによって構成されるサーボモータを備え、中空ロータの端部に装着されるボールネジ及びボールネジに螺合するロッドを備えた直動部を有し、該ロッドに前記制御加圧部を有する制御加圧力付与アームが連結されたことを特徴とする請求項1または2に記載のスポット溶接装置。
【図1】


【図2】
【図3】

【図4】

【図5】
【図6】
【図7】

【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−35033(P2013−35033A)
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【出願番号】特願2011−173571(P2011−173571)
【出願日】平成23年8月9日(2011.8.9)
【出願人】(000005348)富士重工業株式会社 (3,010)
【Fターム(参考)】
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【出願日】平成23年8月9日(2011.8.9)
【出願人】(000005348)富士重工業株式会社 (3,010)
【Fターム(参考)】
[ Back to top ]