
スポット溶接部の破断解析方法、破断解析コンピュータープログラム、破断解析装置。
【課題】スポット溶接部の破断解析を行うにおいて、多数存在するスポット溶接部のそれぞれについて、適切な有効幅Bを短時間で決定する。
【解決手段】注目バー要素に最も近いバー要素までの距離を抽出して、スポット間距離L1の情報を取得する工程と、前記注目バー要素の端点に最も近い距離にある母材のエッジを検索し、エッジ間距離L2の情報を取得する工程と、前記注目バー要素の端点に最も近い距離にある母材の稜線を検索し、稜線間距離L3の情報を取得する工程と、前記スポット間距離L1、エッジ間距離L2を2倍した距離、稜線間距離L3を2倍した距離のうち、最も短い距離をスポット溶接の有効幅Bに決定する工程と、前記決定した有効幅Bを破断解析に用いる工程と、を含むようにする。
【解決手段】注目バー要素に最も近いバー要素までの距離を抽出して、スポット間距離L1の情報を取得する工程と、前記注目バー要素の端点に最も近い距離にある母材のエッジを検索し、エッジ間距離L2の情報を取得する工程と、前記注目バー要素の端点に最も近い距離にある母材の稜線を検索し、稜線間距離L3の情報を取得する工程と、前記スポット間距離L1、エッジ間距離L2を2倍した距離、稜線間距離L3を2倍した距離のうち、最も短い距離をスポット溶接の有効幅Bに決定する工程と、前記決定した有効幅Bを破断解析に用いる工程と、を含むようにする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、衝突シミュレーションなどでスポット溶接部の破断を解析する方法、破断解析コンピュータープログラム、破断解析装置に関し、特に、自動車の車体といったような多数のスポット溶接部を有する解析対象物の破断を解析する技術に関する。
【背景技術】
【0002】
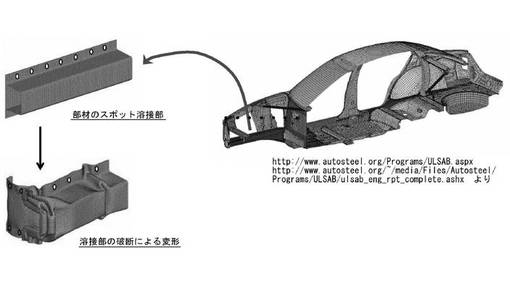
例えば自動車業界では、衝突時の乗員への傷害を低減しうる車体構造とするために、構造部材により衝撃エネルギーを吸収させることを検討している。自動車のフルラップ衝突やオフセット衝突での衝撃エネルギーを吸収させる主要な構造部材は、フロントサイドメンバーである。フロントサイドメンバーは、プレス成形等で部材成形後、スポット溶接により部材を閉断面化している。通常、このフロントサイドメンバーを座屈させることで、衝撃エネルギーを吸収させるようにしている。衝撃エネルギーの吸収を向上させるためには、座屈形態を安定化させ、途中で折れ曲りや破断をさせないことが重要である。
【0003】
構造部材の座屈形態を安定化させるためには、スポット溶接間隔,ナゲット径,溶接条件を最適化する必要がある。そのため、これらスポット溶接間隔,ナゲット径,溶接条件からスポット溶接部の破断限界を推定し、座屈形態が安定化する最適条件を見出す方法が検討されている(例えば、特許文献1−3参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−148053号公報
【特許文献2】特開2005−315854号公報
【特許文献3】特開2007−304005号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1−3に開示されている破断解析方法では、スポット溶接部の性質や負荷状態に応じて、荷重型破断、モーメント型破断、ナゲット内破断のいずれの破断モードが発生するかを判別できないので、衝突シミュレーションにおける解析精度が必ずしも高いとは言えなかった。
【0006】
そのため、本願の出願人によって、荷重型破断、モーメント型破断、ナゲット内破断のいずれの破断モードが発生するかを判別可能な、改善された破断解析方法が検討されている(特願2010−088271)。この破断解析方法は、コンピューターを用い、スポット溶接される鋼板のそれぞれの板厚t、引張強さTS、伸びEl、化学成分、溶接部のナゲット径d、隣接する溶接部、エッジ又は稜線との距離で決まるスポット溶接の有効幅B、断面高さHに基づいて、荷重型破断、モーメント型破断、ナゲット内破断のそれぞれの破断モードの破断限界を求め、スポット溶接部の状態量が前記いずれかの破断モードの破断限界に達したときに該破断モードで破断したと評価する。
【0007】
上述の改善された破断解析方法は、衝突シミュレーションにおける解析精度が高いという長所がある反面、全てのスポット溶接部に対して有効幅Bを決定しなければならず、準備設定に時間がかかるという問題点があった。自動車の車体には、通常、数千点にも及ぶスポット溶接部が存在するため、これら全てのスポット溶接部に対して隣接する溶接部との距離,エッジとの距離,稜線との距離を算出し、その中から有効幅Bを決定し、コンピューターに入力するには長時間を要する。
【0008】
更に、スポット溶接部によっては、隣接する溶接部が存在しなかったり、稜線が存在しなかったりする等、必ずしも前述の3つの距離が揃わない場合もあり、数千点にも及ぶスポット溶接部のそれぞれについて隣接する溶接部との距離,エッジとの距離,稜線との距離のいずれを有効幅Bとすれば良いのかも明確でなかった。
【0009】
本発明は、前述のような問題点に鑑みてなされたものであり、スポット溶接部の破断解析を行うにおいて、多数存在するスポット溶接部のそれぞれについて、有効幅Bを短時間で決定することができるアルゴリズムを備えたスポット溶接部の破断解析方法、破断解析コンピュータープログラム、破断解析装置を提供することにある。
【0010】
また本発明の他の目的は、スポット溶接部の有効幅Bを適切に設定して、より精度の高い破断解析を行うことにある。
【課題を解決するための手段】
【0011】
即ち、本発明の要旨とするところは以下のとおりである。
(1)注目バー要素に最も近いバー要素までの距離を抽出して、スポット間距離L1の情報を取得する工程と、前記注目バー要素の端点に最も近い距離にある母材のエッジを検索し、エッジ間距離L2の情報を取得する工程と、前記注目バー要素の端点に最も近い距離にある母材の稜線を検索し、稜線間距離L3の情報を取得する工程と、前記スポット間距離L1、エッジ間距離L2を2倍した距離、稜線間距離L3を2倍した距離のうち、最も短い距離をスポット溶接の有効幅Bに決定する工程と、前記決定した有効幅Bを破断解析に用いる工程と、を含むことを特徴とするスポット溶接部の破断解析方法。
(2)注目シェル要素の線分に隣接するシェル要素が存在するか否かを検索する工程と、隣接するシェル要素が存在した場合、この注目シェル要素の法線ベクトルと隣接するシェル要素の法線ベクトルのなす角θが閾値以上であるか否かを判定する工程と、前記なす角θが閾値以上であった場合、隣接するシェル要素が存在する注目シェル要素の線分を、母材の稜線とする工程と、をさらに含み、共通の母材に属するすべてのシェル要素に対して、隣接するシェル要素が存在するか否かの検索を実行することを特徴とする前記(1)に記載のスポット溶接部の破断解析方法。
(3)注目シェル要素の線分に隣接するシェル要素が存在するか否かを検索する工程と、隣接するシェル要素が存在しなかった場合、この注目シェル要素の線分を母材のエッジとする工程と、をさらに含み、共通の母材に属するすべてのシェル要素に対して、隣接するシェル要素が存在するか否かの検索を実行することを特徴とする前記(1)又は(2)に記載のスポット溶接部の破断解析方法。
(4)前記なす角θの閾値が10度であることを特徴とする請求項2に記載のスポット溶接部の破断解析方法。
(5)注目バー要素に最も近いバー要素までの距離を抽出して、スポット間距離L1の情報を取得する工程と、前記注目バー要素の端点に最も近い距離にあるシェル要素のエッジを検索し、エッジ間距離L2の情報を取得する工程と、前記注目バー要素の端点に最も近い距離にあるシェル要素の稜線を検索し、稜線間距離L3の情報を取得する工程と、前記スポット間距離L1、エッジ間距離L2を2倍した距離、稜線間距離L3を2倍した距離のうち、最も短い距離を有効幅Bに決定する工程と、前記決定した有効幅Bを破断解析に用いる工程と、を含む破断解析処理をコンピューターに実行させることを特徴とするスポット溶接部の破断解析コンピュータープログラム。
(6)注目バー要素に最も近いバー要素までの距離を抽出して、スポット間距離L1の情報を取得する手段と、前記注目バー要素の端点に最も近い距離にあるシェル要素のエッジを検索し、エッジ間距離L2の情報を取得する手段と、前記注目バー要素の端点に最も近い距離にあるシェル要素の稜線を検索し、稜線間距離L3の情報を取得する手段と、前記スポット間距離L1、エッジ間距離L2を2倍した距離、稜線間距離L3を2倍した距離のうち、最も短い距離を有効幅Bに決定する手段と、前記決定した有効幅Bを破断解析に用いる手段と、を備えたことを特徴とするスポット溶接部の破断解析装置。
【発明の効果】
【0012】
本発明によれば、注目バー要素に最も近いバー要素までの距離を抽出して、スポット間距離L1の情報を取得し、注目バー要素の端点に最も近い距離にある母材のエッジを検索してエッジ間距離L2の情報を取得し、注目バー要素の端点に最も近い距離にある母材の稜線を検索して稜線間距離L3の情報を取得し、スポット間距離L1、エッジ間距離L2を2倍した距離、稜線間距離L3を2倍した距離のうち、最も短い距離を有効幅Bに決定するアルゴリズムを採用したことによって、多数存在するスポット溶接部のそれぞれについて、有効幅Bの決定を短時間で行うことが可能となる。
【0013】
さらに、本発明によれば、スポット間距離L1、エッジ間距離L2を2倍した距離、稜線間距離L3を2倍した距離のうち、最も短い距離を有効幅Bとすることにより、スポット溶接の破断に影響を及ぼす周辺要因のうち、最も強い影響を及ぼすものの存在を破断解析において考慮することができ、その結果、精度の高い破断解析を行うことが可能となる。
【図面の簡単な説明】
【0014】
【図1】スポット溶接部の破断解析のモデルを模式的に示した図である。
【図2】解析対象物の一例として、モデル化された車体を示す。
【図3】モデル化された解析対象物の母材のデータベースを示す。
【図4】モデル化された解析対象物のシェル要素のデータベースを示す。
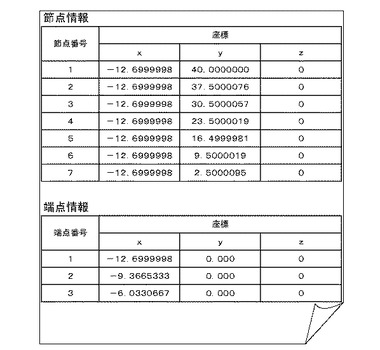
【図5】モデル化された解析対象物の節点・端点のデータベースを示す。
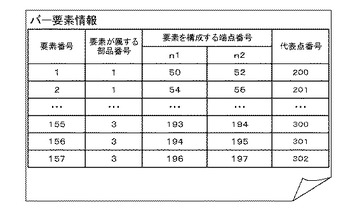
【図6】モデル化された解析対象物のバー要素のデータベースを示す。
【図7】モデル化された解析対象物(一部)の模式図を示す。
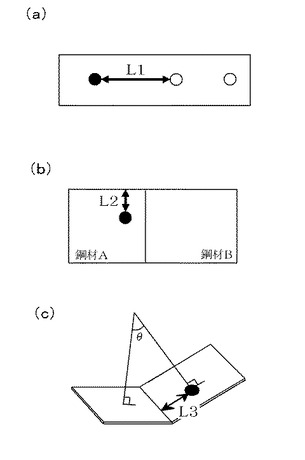
【図8】スポット溶接の有効幅Bになる得る3つの要因について説明した図である。
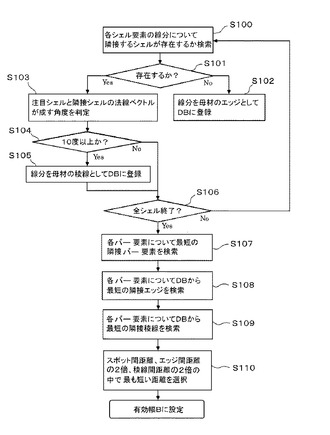
【図9】本発明の好ましい実施形態に従う有効幅Bの設定手順を示すフローチャートである。
【図10】上記破断解析を実行可能なコンピューターシステムのブロック図である。
【図11】有効幅Bを自動算定して破断解析を行った実施例1の解析条件を示す。
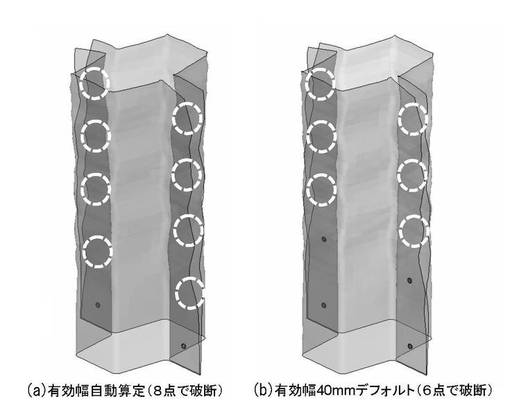
【図12】実施例1の解析結果を示す。
【発明を実施するための形態】
【0015】
以下、本発明の好ましい実施形態に従うスポット溶接部の破断解析方法について、添付図面を参照しながら詳しく説明する。但し、以下に説明する実施形態によって本発明の技術的範囲は何ら限定解釈されることはない。
【0016】
まず、スポット溶接部の破断解析モデルについて説明する。破断解析は、通常、有限要素法を用いてコンピューター上で行われる。そのため、スポット溶接部は、バー要素(ビーム要素と称されることもある)、シェル要素、ソリッド要素等を用いてモデル化され、ベクトル状態量として要素に負荷される荷重やモーメントの値を取得して破断解析を行う。
【0017】
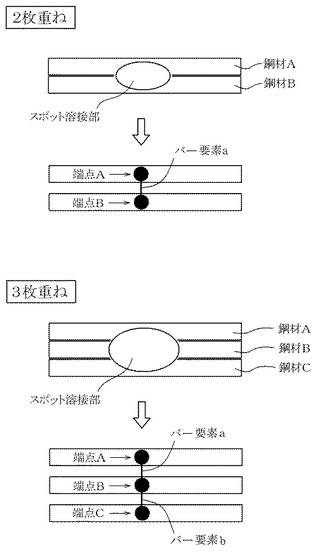
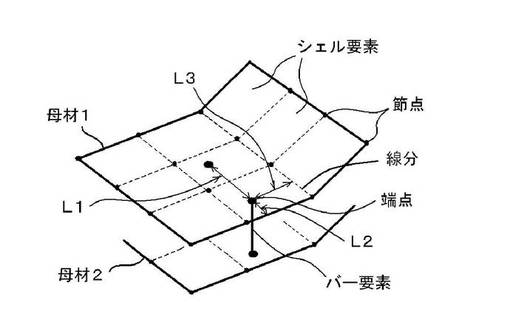
例えば母材として鋼材Aと鋼材Bの2枚の板材を重ねて溶接したスポット溶接部の場合、図1に模式的に示すように、鋼材Aと鋼材Bの接続部位がバー要素aと端点A,Bで構成されているとしてモデル化する。一方、鋼材Aと鋼材Bは、シェル要素によってモデル化する。そして破断解析を実行する際には、コンピューターを用いてモデル化されたバー要素aと端点A,Bに働く応力やせん断力などを演算し、破断基準値を超えるか否かを判定する。そのための必要情報として、上述の改善された破断解析方法(特願2010−088271)では、スポット溶接される鋼板それぞれの板厚t、引張強さTS、伸びEl、化学成分、溶接部のナゲット径d、隣接する溶接部、エッジ又は稜線との距離で決まる有効幅B、断面高さHをコンピューターに入力している。
【0018】
一方、鋼材A、鋼材B及び鋼材Cの3枚の板材を重ねて溶接したスポット溶接部の場合、鋼材Aと鋼材B、鋼材Bと鋼材Cを、2枚重ねのときと同様にバー要素と端点でモデル化する。その結果、図1に模式的に示すように、鋼材Aと鋼材Bを接続するバー要素aと、鋼材Bと鋼材Cを接続するバー要素bを有し、鋼材B上にある端点Bをバー要素aとバー要素bが共有した構成にモデル化される。しかし、上述の改善された破断解析方法では、この3枚重ねのモデルをそのまま解析することができないため、見掛け上、2枚重ねのモデルに調整して解析を行う。具体的には、鋼材Aと鋼材Bを接続するバー要素aに注目した場合、鋼材Bと鋼材Cを1つの要素とみなし、鋼材Aの板厚の値と、鋼材Bと鋼材Cの板厚を足した値をそれぞれ入力する。一方、鋼材Cと鋼材Bを接続するバー要素bに注目した場合には、鋼材Aと鋼材Bを1つの要素とみなし、鋼材Cの板厚の値と、鋼材Aと鋼材Bの板厚を足した値をそれぞれ入力する。
【0019】
さらに、シェル要素によるモデル化について説明する。例えば解析対象物が自動車の車体の場合、図2に模式的に示すように、設計CADにおいて車体がシェル要素にモデル化され、モデル化された各シェル要素の情報がメモリ等の記憶部に格納されている。シェル要素の情報には、各シェルが属する母材の識別番号(母材番号)、及び、各シェルの節点の座標(x,y,z)が含まれる。また、各スポット溶接部の情報として、モデル化された各バー要素の情報がメモリ等の記憶部に格納されている。バー要素の情報には、バー要素が属する母材の識別番号(母材番号)、及び、各バー要素に付された識別番号(要素番号)に対応付けた端点の座標(x,y,z)、バー要素の代表点が含まれる。
【0020】
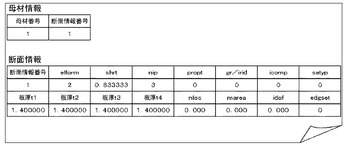
図3〜図6は、モデル化された各要素情報を格納するデータベースの一例を示す。さらに、モデル化された対象物(一部)の模式図を図7に示す。まず、図3は、母材のデータベースである。このデータベースには、各母材に割り付けた識別番号(母材番号)、母材の断面情報番号の情報が含まれる。更に、各断面情報番号に対応つけて断面情報のデータベースが形成されている。断面情報には、母材の板厚tが含まれる。なお、本実施形態では特に使用しないが、板厚t以外の情報として、ELFORM:要素タイプ、SHRF:せん断面積係数、NIP:断面内板厚方向積分点数、PROPT:プリント出力オプション、QR/IRID:要素積分方法、ICOMP:材料軸角度定義フラグ、SETYP:2次元ソリッド要素タイプ、NLOC:3次元シェル要素参照面位置、MAREA:非構造部の単位面積あたりの質量、IDOF:板厚フィールドの連続/不連続フラグ、EDGSET:節点セットの情報も、このデータベースに格納することができる。
【0021】
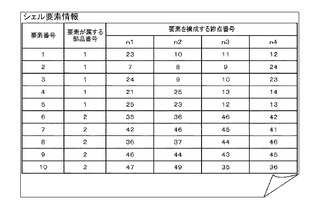
図4は、シェル要素のデータベースである。このデータベースには、各シェル要素に割り付けた識別番号(要素番号)、各シェル要素が属する母材番号、各シェル要素の節点の識別番号(節点番号)の情報が含まれる。図4は、母材を四角形のメッシュにしたシェル要素のデータベースの例であり、従って、一つのシェル要素が4つの節点(n1〜n4)を有している。母材を三角形のメッシュにした場合には、一つのシェル要素が3つの節点(n1〜n3)を有することになる。節点(n1〜n4)の座標(x,y,z)の情報は、図5に示すように、節点番号に対応付けて、節点・端点のデータベースに格納されている。
【0022】
図6は、バー要素のデータベースである。このデータベースには、各バー要素に割り付けた識別番号(要素番号)、各バー要素が属する母材番号、各バー要素の両端点(n1,n2)の識別番号(端点番号)の情報が含まれる。両端点(n1,n2)の座標(x,y,z)の情報は、図5に示すように、端点番号に対応付けて節点・端点のデータベースに格納されている。バー要素のデータベースには、さらに代表点の情報が含まれている。バー要素の代表点は、例えばバー要素の長さ方向の中央点であり、両端点の座標(x,y,z)の情報から演算により算出される座標とすることができる。図6では、バー要素の識別番号(要素番号)に対応付けた代表点の識別番号(代表点番号)を格納しており、代表点番号に対応する座標(x,y,z)の情報は、節点・端点のデータベースのような別のデータベース(不図示)に格納する。
【0023】
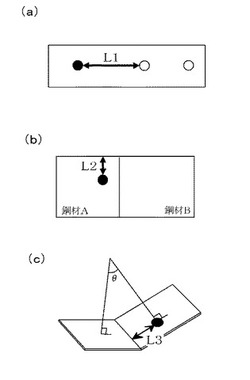
スポット溶接の有効幅Bとなり得る要素としては、図8(a)〜(c)の3つがある。第1に、同一の母材上に複数のスポット溶接部が存在する場合には、図8(a)に模式的に示すように、注目しているスポット溶接部に最も近いスポット溶接部までの距離(スポット間距離)L1が有効幅Bの候補となり得る。シェル要素にモデル化した場合は、同一シェル要素上に存在する最も近いバー要素までの距離が、スポット間距離L1となる。
【0024】
第2に、図8(b)に模式的に示すように、注目しているスポット溶接部によって溶接された部品(鋼材AとBの溶接部品)の最も近いエッジまでの距離(エッジ間距離)L2を2倍にした値(=L2×2)が、有効幅Bの候補となり得る。スポット溶接部から最短のエッジ間距離L2を2倍にすることにより、スポット溶接部が部品上の偏った位置にあった場合にも、有効幅Bを適切な値に設定することができる。なお、エッジとは、1つのシェル要素だけに属した2つの節点で構成される線分を意味する。
【0025】
第3に、図8(c)に模式的に示すように、注目しているスポット溶接部と、このスポット溶接部が溶接している部品上で最も近い稜線までの距離(稜線間距離)L3を2倍にした値(=L3×2)が、有効幅Bの候補となり得る。ここでも、スポット溶接部から稜線間距離L3を2倍にすることにより、スポット溶接部が部品上の偏った位置にあった場合にも、有効幅Bを適切な値に設定することができる。なお、ここでいう稜線とは、2つのシェル要素に共通で、且つシェルの法線ベクトル同士のなす角θが閾値(10度)以上ある辺(2つの節点で構成される線分)を意味する。
【0026】
本実施形態に従う破断解析では、有効幅Bとなり得る上述の3つ候補値を抽出し、それらの候補の一つを有効幅Bに決定する。その手順について、図9のフローチャートを参照しながら説明する。
【0027】
(有効幅Bの設定手順)
まず、図9のステップS100に示すように、注目シェル要素の線分について、隣接するシェル要素が存在するかを検索する。そして、図9のステップS101において隣接するシェル要素の存在の有無を判定する。隣接するシェル要素が存在しなかった場合、ステップS102において、この注目シェル要素の線分を母材のエッジとしてコンピューターのデータベース(DB)に格納する。
【0028】
前述の図3〜図6のデータベースの例では、シェル要素のデータベースから情報を読み出し、注目したシェル要素が有する4つの節点番号のうち、節点番号が2つ同じシェル要素が有るか否かを判定する。節点番号が2つ同じシェル要素が有った場合には、隣接するシェル要素が存在すると判定する。節点番号が2つ同じシェル要素が見つからない場合は、隣接するシェル要素は存在しないと判定する。また節点番号が1つだけ同じ場合、両者は対角位置にあるので隣接するシェル要素は存在しないと判定する。
【0029】
一方、ステップS101の判定において隣接するシェル要素が存在していた場合には、図9のステップS103に示すように、注目シェル要素と隣接シェル要素の法線ベクトルが成す角度θを算出し、さらにステップS104において角度θが閾値(10度)以上であるか否かを判定する。判定の結果が閾値(10度)以上であった場合にのみ、ステップS105に示すように、注目シェル要素と隣接シェル要素をつないでいる線分を母材の稜線(正確には母材の稜線の一部)としてデータベース(DB)に格納する。なお、閾値は10度が好ましいが、必ずしも10度でなくともよく、10度〜15度の範囲内で任意に設定することができる。10度未満の場合、母材の曲面を稜線と誤認する場合があり、抽出の精度が低下する場合がある。一方、15度を超えると稜線の抽出漏れがある場合がある。
【0030】
上述のステップS100〜S105までの処理は、解析対象物の全てのシェルについて行い、図9のステップS106において全てのシェルについての処理が完了したと判定した場合に、次のステップS107に進行する。
【0031】
続いて、図9のステップS107に示すように、注目バー要素について隣接バー要素を検索し、共通する母材上に隣接バー要素が存在している場合には、その中の最短距離にあるバー要素までの距離を、スポット間距離L1とする。バー要素間の距離は、例えば各バー要素の、共通する母材上にある端点同士の距離である。この距離は、母材の面上に沿った行程距離とするのが望ましいが、3次元空間での絶対距離としてもよい。当該ステップにおいては、一つのバー要素についてスポット間距離L11の情報を取得すると、次の注目バー要素についてスポット間距離L12の情報を取得し、これを繰り返すことによって全てのバー要素についてスポット間距離L11,L12,・・・,L1nの情報を取得する。
【0032】
次に、図9のステップS108に示すように、注目バー要素について、上述のデータベース(DB)に登録されているエッジまでの距離情報を読み出し、その中から最短のエッジまでの距離を、エッジ間距離L2とする。エッジ間距離L2は、例えば注目バー要素の端点とエッジと判定されたシェル要素の線分までの距離である。この距離は、シェル要素の面上に沿った行程距離とするのが望ましいが、3次元空間での絶対距離としてもよい。当該ステップにおいても、一つのバー要素についてエッジ間距離L21の情報を取得すると、次の注目バー要素についてエッジ間距離L22の情報を取得し、これを繰り返すことによって全てのバー要素についてエッジ間距離L21,L22,・・・,L2nの情報を取得する。
【0033】
次に、図9のステップS109に示すように、注目バー要素について、上述のデータベース(DB)に登録されている稜線までの距離情報を読み出し、その中から最短の稜線までの距離を、稜線間距離L3とする。稜線間距離L3は、例えば注目バー要素の端点と稜線と判定されたシェル要素の線分までの距離である。この距離は、シェル要素の面上に沿った行程距離とするのが望ましいが、3次元空間での絶対距離としてもよい。当該ステップにおいても、一つのバー要素について稜線間距離L31の情報を取得すると、次の注目バー要素について稜線間距離L32の情報を取得し、これを繰り返すことによって全てのバー要素について稜線間距離L31,L32,・・・,L3nの情報を取得する。
【0034】
次に、図9のステップS110に示すように、各バー要素について、ステップS107にて取得したスポット間距離L1の値と、ステップS108にて取得したエッジ間距離L2を2倍した値と、ステップS109にて取得した稜線間距離L3を2倍した値とを比較し、その中で最も短い値(距離)を選択する。そして、この選択した距離を、当該バー要素でモデル化されたスポット溶接部の有効幅Bに設定する。なお、スポット間距離L1の値、エッジ間距離L2を2倍した値、稜線間距離L3を2倍した値の全部又は2つが同じ値であっても、最も小さい値であればその値を有効幅Bに設定すればよい。
【0035】
続いて、破断解析の手順について説明する。以下の説明は、本願の出願人によって改善された破断解析方法(特願2010−088271)を一例に挙げているが、必ずしもこの破断解析方法に限定はされない。破断解析は、準備設定作業としてコンピューターに入力情報を読み込ませる。この入力情報には、図9の手順に従ってコンピューターが設定した有効幅Bの情報が含まれる。
【0036】
鋼板A,Bをスポット溶接する場合の入力項目を表1に示す。破断モードによって判定に用いられる入力項目は異なるが、ここに挙げたすべての入力項目を用いることで、すべての破断モードに対する評価を行うことができるため、最も早く限界値に達した破断モードを知ることが可能となる。
【0037】
【表1】

次に、荷重型破断、モーメント型破断、ナゲット内破断のそれぞれの破断モードに応じて表1の○印に示す入力項目を使用して破断限界(クライテリア)を算出する。なお、それぞれの破断モードにおける破断限界(クライテリア)の算定方法は、特に限定されないが、例えば下記の方法を用いることが好ましい。
【0038】
まず、荷重型破断の場合は、スポット溶接部を有する試験片のせん断引張試験又は十字形引張試験を行い、ナゲット径d(mm)と前記試験片の幅W(mm)との比d/Wと、(1)式による応力集中係数αの関係を予め求め、任意の引張強さを有する材料を対象として(2)式によりせん断引張試験によるスポット溶接部の破断限界荷重Fs(N)を算定する方法が好ましい。
【0039】
α=TS・W・t/F ・・・(1)
ここで、TS:引張強さ(MPa)、t:試験片の厚さ(mm)、F:破断限界張力(N)
Fs=TS・W・t/α ・・・(2)
また、モーメント型破断の場合は、スポット溶接部を有するフランジ引張試験を行い、スポット溶接部の端部に加えた曲げモーメントM(N・m)と、試験材の板厚、板幅、強度特性から理論的に求まる全塑性モーメントMp(N・m)から、(3)式によるモーメント効率γを予め求め、このモーメント効率γと、任意の板厚、板幅、強度特性を有する材料に対する全塑性モーメントMp´から(4)式によるフランジ引張試験によるスポット溶接部の破断限界モーメントMlim(N・m)を算定する方法が好ましい。
【0040】
γ=Mp/M・・・(3)
Mlim=Mp´/γ ・・・(4)
また、ナゲット内破断の場合は、例えば、下記(5)式により、スポット溶接部の破断限界荷重Fs(N)を算定する方法が好ましい。
【0041】
Fs=e×Π(d/2)2×(f×Ceq+g)・・・ (5)
ここで、d:ナゲット径(mm)、Ceq:ナゲット部炭素当量の厚み方向の重み付き平均、e,f,g:係数
そして、各時刻ごとにスポット溶接要素の荷重・モーメント出力に基づくモードごとの状態変数を計算する。
【0042】
次に、破断モードごとに前述の限界値と状態変数を比較する。そして、いずれかのモードの状態変数が限界値に達している場合、以後、破断発生済みと判定し、その後の溶接要素の相対変位(ひずみ)に応じて許容荷重値を低下させる。全プロセスの力学計算終了後、破断詳細情報を出力する。
【0043】
上述の実施形態によれば、注目バー要素に最も近いバー要素までの距離を抽出して、スポット間距離L1の情報を取得し、注目バー要素の端点に最も近い距離にある母材のエッジを検索してエッジ間距離L2の情報を取得し、注目バー要素の端点に最も近い距離にある母材の稜線を検索して稜線間距離L3の情報を取得し、スポット間距離L1、エッジ間距離L2を2倍した距離、稜線間距離L3を2倍した距離のうち、最も短い距離を有効幅Bに決定するアルゴリズムを採用したことによって、多数存在するスポット溶接部のそれぞれについて、有効幅Bの決定を短時間で行うことが可能となる。
【0044】
さらに、上述の実施形態によれば、スポット間距離L1、エッジ間距離L2を2倍した距離、稜線間距離L3を2倍した距離のうち、最も短い距離を有効幅Bとすることにより、スポット溶接の破断に影響を及ぼす外乱要因のうち、最も強い影響を及ぼすものの存在を破断解析で考慮することができ、その結果、精度の高い破断解析を行うことが可能となる。
【0045】
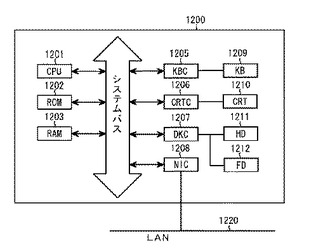
最後に、上述の破断解析を実行可能なコンピューターシステムの一例について、図10のブロック図を参照しながら説明する。同図において、1200はコンピューターPCである。PC1200は、CPU1201を備え、ROM1202又はハードディスク(HD)1211に記憶された、或いはフレキシブルディスクドライブ(FD)1212により供給されるデバイス制御ソフトウェアを実行し、システムバス1204に接続される各デバイスを総括的に制御する。前記PC1200のCPU1201、ROM1202又はハードディスク(HD)1211に記憶されたプログラムにより、本実施形態の処理を行う各機能手段が構成される。
【0046】
1203はRAMで、CPU1201の主メモリ、ワークエリア等として機能する。1205はキーボードコントローラ(KBC)であり、キーボード(KB)1209から入力される信号をシステム本体内に入力する制御を行う。1206は表示コントローラ(CRTC)であり、表示装置(CRT)1210上の表示制御を行う。1207はディスクコントローラ(DKC)で、ブートプログラム(起動プログラム:パソコンのハードやソフトの実行(動作)を開始するプログラム)、複数のアプリケーション、編集ファイル、ユーザファイルそしてネットワーク管理プログラム等を記憶するハードディスク(HD)1211、及びフレキシブルディスク(FD)1212とのアクセスを制御する。
【0047】
1208はネットワークインターフェースカード(NIC)で、LAN1220を介して、ネットワークプリンタ、他のネットワーク機器、或いは他のPCと双方向のデータのやり取りを行う。
【0048】
上述した実施形態の機能は、コンピューターがコンピュータープログラムを実行することによっても実現される。また、コンピュータープログラムをコンピューターに供給するための手段、例えばかかるプログラムを記録したCD−ROM等のコンピューター読み取り可能な記録媒体又はかかるプログラムを伝送するインターネット等の伝送媒体も本発明の実施形態として適用することができる。また、前記のプログラムを記録したコンピューター読み取り可能な記録媒体等のコンピュータプログラムプロダクトも本発明の実施形態として適用することができる。前記のコンピュータープログラム、記録媒体、伝送媒体及びコンピュータプログラムプロダクトは、本発明の範疇に含まれる。記録媒体としては、例えばフレキシブルディスク、ハードディスク、光ディスク、光磁気ディスク、CD−ROM、磁気テープ、不揮発性メモリ、ROM等を用いることができる。
【実施例】
【0049】
(実施例1)
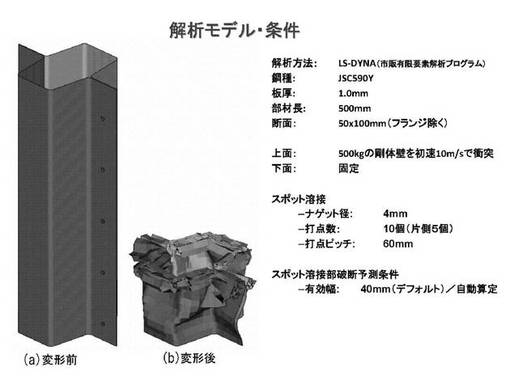
続いて、有効幅Bを自動算定して破断解析を行った実施例1について説明する。本実施例では、図11に示すように、2枚重ね溶接によって形成された構造部材の破断解析を行った。詳しい解析条件については同図に示す。破断解析を実行するにあたり、図9のフローチャートに従う処理を実行可能なプログラムがインストールされたコンピューターを用いて有効幅Bの自動算定を行い、各スポット溶接の有効幅Bを破断解析プログラムに認識させた。
【0050】
図12(a)は、破断個所を確認し易いように、図11(a)から図11(b)への変形が20%進行したときの解析結果を示している。同図に示される通り、本実施例では10点在るスポット溶接部のうち8点で破断が発生している。一方、すべてのスポット溶接の有効幅Bを破断解析プログラムのデフォルト値(40mm)とした場合、同図(b)に示されるように、実際には8点で破断するのに6点で破断する結果となっている。よって、図9に示すフローチャートに従って有効幅Bを自動算定すれば、作業時間を大幅に短縮できるのに加えて、衝突シミュレーションにおける解析精度を向上できる効果がある。そして、溶接部の数が数百点、数千点に増えるに伴いその効果がより顕在化する。
【符号の説明】
【0051】
1200 コンピューターPC
1201 CPU
1202 ROM
1203 RAM
1209 キーボード(KB)
1210 表示装置(CRT)
【技術分野】
【0001】
本発明は、衝突シミュレーションなどでスポット溶接部の破断を解析する方法、破断解析コンピュータープログラム、破断解析装置に関し、特に、自動車の車体といったような多数のスポット溶接部を有する解析対象物の破断を解析する技術に関する。
【背景技術】
【0002】
例えば自動車業界では、衝突時の乗員への傷害を低減しうる車体構造とするために、構造部材により衝撃エネルギーを吸収させることを検討している。自動車のフルラップ衝突やオフセット衝突での衝撃エネルギーを吸収させる主要な構造部材は、フロントサイドメンバーである。フロントサイドメンバーは、プレス成形等で部材成形後、スポット溶接により部材を閉断面化している。通常、このフロントサイドメンバーを座屈させることで、衝撃エネルギーを吸収させるようにしている。衝撃エネルギーの吸収を向上させるためには、座屈形態を安定化させ、途中で折れ曲りや破断をさせないことが重要である。
【0003】
構造部材の座屈形態を安定化させるためには、スポット溶接間隔,ナゲット径,溶接条件を最適化する必要がある。そのため、これらスポット溶接間隔,ナゲット径,溶接条件からスポット溶接部の破断限界を推定し、座屈形態が安定化する最適条件を見出す方法が検討されている(例えば、特許文献1−3参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−148053号公報
【特許文献2】特開2005−315854号公報
【特許文献3】特開2007−304005号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1−3に開示されている破断解析方法では、スポット溶接部の性質や負荷状態に応じて、荷重型破断、モーメント型破断、ナゲット内破断のいずれの破断モードが発生するかを判別できないので、衝突シミュレーションにおける解析精度が必ずしも高いとは言えなかった。
【0006】
そのため、本願の出願人によって、荷重型破断、モーメント型破断、ナゲット内破断のいずれの破断モードが発生するかを判別可能な、改善された破断解析方法が検討されている(特願2010−088271)。この破断解析方法は、コンピューターを用い、スポット溶接される鋼板のそれぞれの板厚t、引張強さTS、伸びEl、化学成分、溶接部のナゲット径d、隣接する溶接部、エッジ又は稜線との距離で決まるスポット溶接の有効幅B、断面高さHに基づいて、荷重型破断、モーメント型破断、ナゲット内破断のそれぞれの破断モードの破断限界を求め、スポット溶接部の状態量が前記いずれかの破断モードの破断限界に達したときに該破断モードで破断したと評価する。
【0007】
上述の改善された破断解析方法は、衝突シミュレーションにおける解析精度が高いという長所がある反面、全てのスポット溶接部に対して有効幅Bを決定しなければならず、準備設定に時間がかかるという問題点があった。自動車の車体には、通常、数千点にも及ぶスポット溶接部が存在するため、これら全てのスポット溶接部に対して隣接する溶接部との距離,エッジとの距離,稜線との距離を算出し、その中から有効幅Bを決定し、コンピューターに入力するには長時間を要する。
【0008】
更に、スポット溶接部によっては、隣接する溶接部が存在しなかったり、稜線が存在しなかったりする等、必ずしも前述の3つの距離が揃わない場合もあり、数千点にも及ぶスポット溶接部のそれぞれについて隣接する溶接部との距離,エッジとの距離,稜線との距離のいずれを有効幅Bとすれば良いのかも明確でなかった。
【0009】
本発明は、前述のような問題点に鑑みてなされたものであり、スポット溶接部の破断解析を行うにおいて、多数存在するスポット溶接部のそれぞれについて、有効幅Bを短時間で決定することができるアルゴリズムを備えたスポット溶接部の破断解析方法、破断解析コンピュータープログラム、破断解析装置を提供することにある。
【0010】
また本発明の他の目的は、スポット溶接部の有効幅Bを適切に設定して、より精度の高い破断解析を行うことにある。
【課題を解決するための手段】
【0011】
即ち、本発明の要旨とするところは以下のとおりである。
(1)注目バー要素に最も近いバー要素までの距離を抽出して、スポット間距離L1の情報を取得する工程と、前記注目バー要素の端点に最も近い距離にある母材のエッジを検索し、エッジ間距離L2の情報を取得する工程と、前記注目バー要素の端点に最も近い距離にある母材の稜線を検索し、稜線間距離L3の情報を取得する工程と、前記スポット間距離L1、エッジ間距離L2を2倍した距離、稜線間距離L3を2倍した距離のうち、最も短い距離をスポット溶接の有効幅Bに決定する工程と、前記決定した有効幅Bを破断解析に用いる工程と、を含むことを特徴とするスポット溶接部の破断解析方法。
(2)注目シェル要素の線分に隣接するシェル要素が存在するか否かを検索する工程と、隣接するシェル要素が存在した場合、この注目シェル要素の法線ベクトルと隣接するシェル要素の法線ベクトルのなす角θが閾値以上であるか否かを判定する工程と、前記なす角θが閾値以上であった場合、隣接するシェル要素が存在する注目シェル要素の線分を、母材の稜線とする工程と、をさらに含み、共通の母材に属するすべてのシェル要素に対して、隣接するシェル要素が存在するか否かの検索を実行することを特徴とする前記(1)に記載のスポット溶接部の破断解析方法。
(3)注目シェル要素の線分に隣接するシェル要素が存在するか否かを検索する工程と、隣接するシェル要素が存在しなかった場合、この注目シェル要素の線分を母材のエッジとする工程と、をさらに含み、共通の母材に属するすべてのシェル要素に対して、隣接するシェル要素が存在するか否かの検索を実行することを特徴とする前記(1)又は(2)に記載のスポット溶接部の破断解析方法。
(4)前記なす角θの閾値が10度であることを特徴とする請求項2に記載のスポット溶接部の破断解析方法。
(5)注目バー要素に最も近いバー要素までの距離を抽出して、スポット間距離L1の情報を取得する工程と、前記注目バー要素の端点に最も近い距離にあるシェル要素のエッジを検索し、エッジ間距離L2の情報を取得する工程と、前記注目バー要素の端点に最も近い距離にあるシェル要素の稜線を検索し、稜線間距離L3の情報を取得する工程と、前記スポット間距離L1、エッジ間距離L2を2倍した距離、稜線間距離L3を2倍した距離のうち、最も短い距離を有効幅Bに決定する工程と、前記決定した有効幅Bを破断解析に用いる工程と、を含む破断解析処理をコンピューターに実行させることを特徴とするスポット溶接部の破断解析コンピュータープログラム。
(6)注目バー要素に最も近いバー要素までの距離を抽出して、スポット間距離L1の情報を取得する手段と、前記注目バー要素の端点に最も近い距離にあるシェル要素のエッジを検索し、エッジ間距離L2の情報を取得する手段と、前記注目バー要素の端点に最も近い距離にあるシェル要素の稜線を検索し、稜線間距離L3の情報を取得する手段と、前記スポット間距離L1、エッジ間距離L2を2倍した距離、稜線間距離L3を2倍した距離のうち、最も短い距離を有効幅Bに決定する手段と、前記決定した有効幅Bを破断解析に用いる手段と、を備えたことを特徴とするスポット溶接部の破断解析装置。
【発明の効果】
【0012】
本発明によれば、注目バー要素に最も近いバー要素までの距離を抽出して、スポット間距離L1の情報を取得し、注目バー要素の端点に最も近い距離にある母材のエッジを検索してエッジ間距離L2の情報を取得し、注目バー要素の端点に最も近い距離にある母材の稜線を検索して稜線間距離L3の情報を取得し、スポット間距離L1、エッジ間距離L2を2倍した距離、稜線間距離L3を2倍した距離のうち、最も短い距離を有効幅Bに決定するアルゴリズムを採用したことによって、多数存在するスポット溶接部のそれぞれについて、有効幅Bの決定を短時間で行うことが可能となる。
【0013】
さらに、本発明によれば、スポット間距離L1、エッジ間距離L2を2倍した距離、稜線間距離L3を2倍した距離のうち、最も短い距離を有効幅Bとすることにより、スポット溶接の破断に影響を及ぼす周辺要因のうち、最も強い影響を及ぼすものの存在を破断解析において考慮することができ、その結果、精度の高い破断解析を行うことが可能となる。
【図面の簡単な説明】
【0014】
【図1】スポット溶接部の破断解析のモデルを模式的に示した図である。
【図2】解析対象物の一例として、モデル化された車体を示す。
【図3】モデル化された解析対象物の母材のデータベースを示す。
【図4】モデル化された解析対象物のシェル要素のデータベースを示す。
【図5】モデル化された解析対象物の節点・端点のデータベースを示す。
【図6】モデル化された解析対象物のバー要素のデータベースを示す。
【図7】モデル化された解析対象物(一部)の模式図を示す。
【図8】スポット溶接の有効幅Bになる得る3つの要因について説明した図である。
【図9】本発明の好ましい実施形態に従う有効幅Bの設定手順を示すフローチャートである。
【図10】上記破断解析を実行可能なコンピューターシステムのブロック図である。
【図11】有効幅Bを自動算定して破断解析を行った実施例1の解析条件を示す。
【図12】実施例1の解析結果を示す。
【発明を実施するための形態】
【0015】
以下、本発明の好ましい実施形態に従うスポット溶接部の破断解析方法について、添付図面を参照しながら詳しく説明する。但し、以下に説明する実施形態によって本発明の技術的範囲は何ら限定解釈されることはない。
【0016】
まず、スポット溶接部の破断解析モデルについて説明する。破断解析は、通常、有限要素法を用いてコンピューター上で行われる。そのため、スポット溶接部は、バー要素(ビーム要素と称されることもある)、シェル要素、ソリッド要素等を用いてモデル化され、ベクトル状態量として要素に負荷される荷重やモーメントの値を取得して破断解析を行う。
【0017】
例えば母材として鋼材Aと鋼材Bの2枚の板材を重ねて溶接したスポット溶接部の場合、図1に模式的に示すように、鋼材Aと鋼材Bの接続部位がバー要素aと端点A,Bで構成されているとしてモデル化する。一方、鋼材Aと鋼材Bは、シェル要素によってモデル化する。そして破断解析を実行する際には、コンピューターを用いてモデル化されたバー要素aと端点A,Bに働く応力やせん断力などを演算し、破断基準値を超えるか否かを判定する。そのための必要情報として、上述の改善された破断解析方法(特願2010−088271)では、スポット溶接される鋼板それぞれの板厚t、引張強さTS、伸びEl、化学成分、溶接部のナゲット径d、隣接する溶接部、エッジ又は稜線との距離で決まる有効幅B、断面高さHをコンピューターに入力している。
【0018】
一方、鋼材A、鋼材B及び鋼材Cの3枚の板材を重ねて溶接したスポット溶接部の場合、鋼材Aと鋼材B、鋼材Bと鋼材Cを、2枚重ねのときと同様にバー要素と端点でモデル化する。その結果、図1に模式的に示すように、鋼材Aと鋼材Bを接続するバー要素aと、鋼材Bと鋼材Cを接続するバー要素bを有し、鋼材B上にある端点Bをバー要素aとバー要素bが共有した構成にモデル化される。しかし、上述の改善された破断解析方法では、この3枚重ねのモデルをそのまま解析することができないため、見掛け上、2枚重ねのモデルに調整して解析を行う。具体的には、鋼材Aと鋼材Bを接続するバー要素aに注目した場合、鋼材Bと鋼材Cを1つの要素とみなし、鋼材Aの板厚の値と、鋼材Bと鋼材Cの板厚を足した値をそれぞれ入力する。一方、鋼材Cと鋼材Bを接続するバー要素bに注目した場合には、鋼材Aと鋼材Bを1つの要素とみなし、鋼材Cの板厚の値と、鋼材Aと鋼材Bの板厚を足した値をそれぞれ入力する。
【0019】
さらに、シェル要素によるモデル化について説明する。例えば解析対象物が自動車の車体の場合、図2に模式的に示すように、設計CADにおいて車体がシェル要素にモデル化され、モデル化された各シェル要素の情報がメモリ等の記憶部に格納されている。シェル要素の情報には、各シェルが属する母材の識別番号(母材番号)、及び、各シェルの節点の座標(x,y,z)が含まれる。また、各スポット溶接部の情報として、モデル化された各バー要素の情報がメモリ等の記憶部に格納されている。バー要素の情報には、バー要素が属する母材の識別番号(母材番号)、及び、各バー要素に付された識別番号(要素番号)に対応付けた端点の座標(x,y,z)、バー要素の代表点が含まれる。
【0020】
図3〜図6は、モデル化された各要素情報を格納するデータベースの一例を示す。さらに、モデル化された対象物(一部)の模式図を図7に示す。まず、図3は、母材のデータベースである。このデータベースには、各母材に割り付けた識別番号(母材番号)、母材の断面情報番号の情報が含まれる。更に、各断面情報番号に対応つけて断面情報のデータベースが形成されている。断面情報には、母材の板厚tが含まれる。なお、本実施形態では特に使用しないが、板厚t以外の情報として、ELFORM:要素タイプ、SHRF:せん断面積係数、NIP:断面内板厚方向積分点数、PROPT:プリント出力オプション、QR/IRID:要素積分方法、ICOMP:材料軸角度定義フラグ、SETYP:2次元ソリッド要素タイプ、NLOC:3次元シェル要素参照面位置、MAREA:非構造部の単位面積あたりの質量、IDOF:板厚フィールドの連続/不連続フラグ、EDGSET:節点セットの情報も、このデータベースに格納することができる。
【0021】
図4は、シェル要素のデータベースである。このデータベースには、各シェル要素に割り付けた識別番号(要素番号)、各シェル要素が属する母材番号、各シェル要素の節点の識別番号(節点番号)の情報が含まれる。図4は、母材を四角形のメッシュにしたシェル要素のデータベースの例であり、従って、一つのシェル要素が4つの節点(n1〜n4)を有している。母材を三角形のメッシュにした場合には、一つのシェル要素が3つの節点(n1〜n3)を有することになる。節点(n1〜n4)の座標(x,y,z)の情報は、図5に示すように、節点番号に対応付けて、節点・端点のデータベースに格納されている。
【0022】
図6は、バー要素のデータベースである。このデータベースには、各バー要素に割り付けた識別番号(要素番号)、各バー要素が属する母材番号、各バー要素の両端点(n1,n2)の識別番号(端点番号)の情報が含まれる。両端点(n1,n2)の座標(x,y,z)の情報は、図5に示すように、端点番号に対応付けて節点・端点のデータベースに格納されている。バー要素のデータベースには、さらに代表点の情報が含まれている。バー要素の代表点は、例えばバー要素の長さ方向の中央点であり、両端点の座標(x,y,z)の情報から演算により算出される座標とすることができる。図6では、バー要素の識別番号(要素番号)に対応付けた代表点の識別番号(代表点番号)を格納しており、代表点番号に対応する座標(x,y,z)の情報は、節点・端点のデータベースのような別のデータベース(不図示)に格納する。
【0023】
スポット溶接の有効幅Bとなり得る要素としては、図8(a)〜(c)の3つがある。第1に、同一の母材上に複数のスポット溶接部が存在する場合には、図8(a)に模式的に示すように、注目しているスポット溶接部に最も近いスポット溶接部までの距離(スポット間距離)L1が有効幅Bの候補となり得る。シェル要素にモデル化した場合は、同一シェル要素上に存在する最も近いバー要素までの距離が、スポット間距離L1となる。
【0024】
第2に、図8(b)に模式的に示すように、注目しているスポット溶接部によって溶接された部品(鋼材AとBの溶接部品)の最も近いエッジまでの距離(エッジ間距離)L2を2倍にした値(=L2×2)が、有効幅Bの候補となり得る。スポット溶接部から最短のエッジ間距離L2を2倍にすることにより、スポット溶接部が部品上の偏った位置にあった場合にも、有効幅Bを適切な値に設定することができる。なお、エッジとは、1つのシェル要素だけに属した2つの節点で構成される線分を意味する。
【0025】
第3に、図8(c)に模式的に示すように、注目しているスポット溶接部と、このスポット溶接部が溶接している部品上で最も近い稜線までの距離(稜線間距離)L3を2倍にした値(=L3×2)が、有効幅Bの候補となり得る。ここでも、スポット溶接部から稜線間距離L3を2倍にすることにより、スポット溶接部が部品上の偏った位置にあった場合にも、有効幅Bを適切な値に設定することができる。なお、ここでいう稜線とは、2つのシェル要素に共通で、且つシェルの法線ベクトル同士のなす角θが閾値(10度)以上ある辺(2つの節点で構成される線分)を意味する。
【0026】
本実施形態に従う破断解析では、有効幅Bとなり得る上述の3つ候補値を抽出し、それらの候補の一つを有効幅Bに決定する。その手順について、図9のフローチャートを参照しながら説明する。
【0027】
(有効幅Bの設定手順)
まず、図9のステップS100に示すように、注目シェル要素の線分について、隣接するシェル要素が存在するかを検索する。そして、図9のステップS101において隣接するシェル要素の存在の有無を判定する。隣接するシェル要素が存在しなかった場合、ステップS102において、この注目シェル要素の線分を母材のエッジとしてコンピューターのデータベース(DB)に格納する。
【0028】
前述の図3〜図6のデータベースの例では、シェル要素のデータベースから情報を読み出し、注目したシェル要素が有する4つの節点番号のうち、節点番号が2つ同じシェル要素が有るか否かを判定する。節点番号が2つ同じシェル要素が有った場合には、隣接するシェル要素が存在すると判定する。節点番号が2つ同じシェル要素が見つからない場合は、隣接するシェル要素は存在しないと判定する。また節点番号が1つだけ同じ場合、両者は対角位置にあるので隣接するシェル要素は存在しないと判定する。
【0029】
一方、ステップS101の判定において隣接するシェル要素が存在していた場合には、図9のステップS103に示すように、注目シェル要素と隣接シェル要素の法線ベクトルが成す角度θを算出し、さらにステップS104において角度θが閾値(10度)以上であるか否かを判定する。判定の結果が閾値(10度)以上であった場合にのみ、ステップS105に示すように、注目シェル要素と隣接シェル要素をつないでいる線分を母材の稜線(正確には母材の稜線の一部)としてデータベース(DB)に格納する。なお、閾値は10度が好ましいが、必ずしも10度でなくともよく、10度〜15度の範囲内で任意に設定することができる。10度未満の場合、母材の曲面を稜線と誤認する場合があり、抽出の精度が低下する場合がある。一方、15度を超えると稜線の抽出漏れがある場合がある。
【0030】
上述のステップS100〜S105までの処理は、解析対象物の全てのシェルについて行い、図9のステップS106において全てのシェルについての処理が完了したと判定した場合に、次のステップS107に進行する。
【0031】
続いて、図9のステップS107に示すように、注目バー要素について隣接バー要素を検索し、共通する母材上に隣接バー要素が存在している場合には、その中の最短距離にあるバー要素までの距離を、スポット間距離L1とする。バー要素間の距離は、例えば各バー要素の、共通する母材上にある端点同士の距離である。この距離は、母材の面上に沿った行程距離とするのが望ましいが、3次元空間での絶対距離としてもよい。当該ステップにおいては、一つのバー要素についてスポット間距離L11の情報を取得すると、次の注目バー要素についてスポット間距離L12の情報を取得し、これを繰り返すことによって全てのバー要素についてスポット間距離L11,L12,・・・,L1nの情報を取得する。
【0032】
次に、図9のステップS108に示すように、注目バー要素について、上述のデータベース(DB)に登録されているエッジまでの距離情報を読み出し、その中から最短のエッジまでの距離を、エッジ間距離L2とする。エッジ間距離L2は、例えば注目バー要素の端点とエッジと判定されたシェル要素の線分までの距離である。この距離は、シェル要素の面上に沿った行程距離とするのが望ましいが、3次元空間での絶対距離としてもよい。当該ステップにおいても、一つのバー要素についてエッジ間距離L21の情報を取得すると、次の注目バー要素についてエッジ間距離L22の情報を取得し、これを繰り返すことによって全てのバー要素についてエッジ間距離L21,L22,・・・,L2nの情報を取得する。
【0033】
次に、図9のステップS109に示すように、注目バー要素について、上述のデータベース(DB)に登録されている稜線までの距離情報を読み出し、その中から最短の稜線までの距離を、稜線間距離L3とする。稜線間距離L3は、例えば注目バー要素の端点と稜線と判定されたシェル要素の線分までの距離である。この距離は、シェル要素の面上に沿った行程距離とするのが望ましいが、3次元空間での絶対距離としてもよい。当該ステップにおいても、一つのバー要素について稜線間距離L31の情報を取得すると、次の注目バー要素について稜線間距離L32の情報を取得し、これを繰り返すことによって全てのバー要素について稜線間距離L31,L32,・・・,L3nの情報を取得する。
【0034】
次に、図9のステップS110に示すように、各バー要素について、ステップS107にて取得したスポット間距離L1の値と、ステップS108にて取得したエッジ間距離L2を2倍した値と、ステップS109にて取得した稜線間距離L3を2倍した値とを比較し、その中で最も短い値(距離)を選択する。そして、この選択した距離を、当該バー要素でモデル化されたスポット溶接部の有効幅Bに設定する。なお、スポット間距離L1の値、エッジ間距離L2を2倍した値、稜線間距離L3を2倍した値の全部又は2つが同じ値であっても、最も小さい値であればその値を有効幅Bに設定すればよい。
【0035】
続いて、破断解析の手順について説明する。以下の説明は、本願の出願人によって改善された破断解析方法(特願2010−088271)を一例に挙げているが、必ずしもこの破断解析方法に限定はされない。破断解析は、準備設定作業としてコンピューターに入力情報を読み込ませる。この入力情報には、図9の手順に従ってコンピューターが設定した有効幅Bの情報が含まれる。
【0036】
鋼板A,Bをスポット溶接する場合の入力項目を表1に示す。破断モードによって判定に用いられる入力項目は異なるが、ここに挙げたすべての入力項目を用いることで、すべての破断モードに対する評価を行うことができるため、最も早く限界値に達した破断モードを知ることが可能となる。
【0037】
【表1】
次に、荷重型破断、モーメント型破断、ナゲット内破断のそれぞれの破断モードに応じて表1の○印に示す入力項目を使用して破断限界(クライテリア)を算出する。なお、それぞれの破断モードにおける破断限界(クライテリア)の算定方法は、特に限定されないが、例えば下記の方法を用いることが好ましい。
【0038】
まず、荷重型破断の場合は、スポット溶接部を有する試験片のせん断引張試験又は十字形引張試験を行い、ナゲット径d(mm)と前記試験片の幅W(mm)との比d/Wと、(1)式による応力集中係数αの関係を予め求め、任意の引張強さを有する材料を対象として(2)式によりせん断引張試験によるスポット溶接部の破断限界荷重Fs(N)を算定する方法が好ましい。
【0039】
α=TS・W・t/F ・・・(1)
ここで、TS:引張強さ(MPa)、t:試験片の厚さ(mm)、F:破断限界張力(N)
Fs=TS・W・t/α ・・・(2)
また、モーメント型破断の場合は、スポット溶接部を有するフランジ引張試験を行い、スポット溶接部の端部に加えた曲げモーメントM(N・m)と、試験材の板厚、板幅、強度特性から理論的に求まる全塑性モーメントMp(N・m)から、(3)式によるモーメント効率γを予め求め、このモーメント効率γと、任意の板厚、板幅、強度特性を有する材料に対する全塑性モーメントMp´から(4)式によるフランジ引張試験によるスポット溶接部の破断限界モーメントMlim(N・m)を算定する方法が好ましい。
【0040】
γ=Mp/M・・・(3)
Mlim=Mp´/γ ・・・(4)
また、ナゲット内破断の場合は、例えば、下記(5)式により、スポット溶接部の破断限界荷重Fs(N)を算定する方法が好ましい。
【0041】
Fs=e×Π(d/2)2×(f×Ceq+g)・・・ (5)
ここで、d:ナゲット径(mm)、Ceq:ナゲット部炭素当量の厚み方向の重み付き平均、e,f,g:係数
そして、各時刻ごとにスポット溶接要素の荷重・モーメント出力に基づくモードごとの状態変数を計算する。
【0042】
次に、破断モードごとに前述の限界値と状態変数を比較する。そして、いずれかのモードの状態変数が限界値に達している場合、以後、破断発生済みと判定し、その後の溶接要素の相対変位(ひずみ)に応じて許容荷重値を低下させる。全プロセスの力学計算終了後、破断詳細情報を出力する。
【0043】
上述の実施形態によれば、注目バー要素に最も近いバー要素までの距離を抽出して、スポット間距離L1の情報を取得し、注目バー要素の端点に最も近い距離にある母材のエッジを検索してエッジ間距離L2の情報を取得し、注目バー要素の端点に最も近い距離にある母材の稜線を検索して稜線間距離L3の情報を取得し、スポット間距離L1、エッジ間距離L2を2倍した距離、稜線間距離L3を2倍した距離のうち、最も短い距離を有効幅Bに決定するアルゴリズムを採用したことによって、多数存在するスポット溶接部のそれぞれについて、有効幅Bの決定を短時間で行うことが可能となる。
【0044】
さらに、上述の実施形態によれば、スポット間距離L1、エッジ間距離L2を2倍した距離、稜線間距離L3を2倍した距離のうち、最も短い距離を有効幅Bとすることにより、スポット溶接の破断に影響を及ぼす外乱要因のうち、最も強い影響を及ぼすものの存在を破断解析で考慮することができ、その結果、精度の高い破断解析を行うことが可能となる。
【0045】
最後に、上述の破断解析を実行可能なコンピューターシステムの一例について、図10のブロック図を参照しながら説明する。同図において、1200はコンピューターPCである。PC1200は、CPU1201を備え、ROM1202又はハードディスク(HD)1211に記憶された、或いはフレキシブルディスクドライブ(FD)1212により供給されるデバイス制御ソフトウェアを実行し、システムバス1204に接続される各デバイスを総括的に制御する。前記PC1200のCPU1201、ROM1202又はハードディスク(HD)1211に記憶されたプログラムにより、本実施形態の処理を行う各機能手段が構成される。
【0046】
1203はRAMで、CPU1201の主メモリ、ワークエリア等として機能する。1205はキーボードコントローラ(KBC)であり、キーボード(KB)1209から入力される信号をシステム本体内に入力する制御を行う。1206は表示コントローラ(CRTC)であり、表示装置(CRT)1210上の表示制御を行う。1207はディスクコントローラ(DKC)で、ブートプログラム(起動プログラム:パソコンのハードやソフトの実行(動作)を開始するプログラム)、複数のアプリケーション、編集ファイル、ユーザファイルそしてネットワーク管理プログラム等を記憶するハードディスク(HD)1211、及びフレキシブルディスク(FD)1212とのアクセスを制御する。
【0047】
1208はネットワークインターフェースカード(NIC)で、LAN1220を介して、ネットワークプリンタ、他のネットワーク機器、或いは他のPCと双方向のデータのやり取りを行う。
【0048】
上述した実施形態の機能は、コンピューターがコンピュータープログラムを実行することによっても実現される。また、コンピュータープログラムをコンピューターに供給するための手段、例えばかかるプログラムを記録したCD−ROM等のコンピューター読み取り可能な記録媒体又はかかるプログラムを伝送するインターネット等の伝送媒体も本発明の実施形態として適用することができる。また、前記のプログラムを記録したコンピューター読み取り可能な記録媒体等のコンピュータプログラムプロダクトも本発明の実施形態として適用することができる。前記のコンピュータープログラム、記録媒体、伝送媒体及びコンピュータプログラムプロダクトは、本発明の範疇に含まれる。記録媒体としては、例えばフレキシブルディスク、ハードディスク、光ディスク、光磁気ディスク、CD−ROM、磁気テープ、不揮発性メモリ、ROM等を用いることができる。
【実施例】
【0049】
(実施例1)
続いて、有効幅Bを自動算定して破断解析を行った実施例1について説明する。本実施例では、図11に示すように、2枚重ね溶接によって形成された構造部材の破断解析を行った。詳しい解析条件については同図に示す。破断解析を実行するにあたり、図9のフローチャートに従う処理を実行可能なプログラムがインストールされたコンピューターを用いて有効幅Bの自動算定を行い、各スポット溶接の有効幅Bを破断解析プログラムに認識させた。
【0050】
図12(a)は、破断個所を確認し易いように、図11(a)から図11(b)への変形が20%進行したときの解析結果を示している。同図に示される通り、本実施例では10点在るスポット溶接部のうち8点で破断が発生している。一方、すべてのスポット溶接の有効幅Bを破断解析プログラムのデフォルト値(40mm)とした場合、同図(b)に示されるように、実際には8点で破断するのに6点で破断する結果となっている。よって、図9に示すフローチャートに従って有効幅Bを自動算定すれば、作業時間を大幅に短縮できるのに加えて、衝突シミュレーションにおける解析精度を向上できる効果がある。そして、溶接部の数が数百点、数千点に増えるに伴いその効果がより顕在化する。
【符号の説明】
【0051】
1200 コンピューターPC
1201 CPU
1202 ROM
1203 RAM
1209 キーボード(KB)
1210 表示装置(CRT)
【特許請求の範囲】
【請求項1】
注目バー要素に最も近いバー要素までの距離を抽出して、スポット間距離L1の情報を取得する工程と、
前記注目バー要素の端点に最も近い距離にある母材のエッジを検索し、エッジ間距離L2の情報を取得する工程と、
前記注目バー要素の端点に最も近い距離にある母材の稜線を検索し、稜線間距離L3の情報を取得する工程と、
前記スポット間距離L1、エッジ間距離L2を2倍した距離、稜線間距離L3を2倍した距離のうち、最も短い距離をスポット溶接の有効幅Bに決定する工程と、
前記決定した有効幅Bを破断解析に用いる工程と、を含むことを特徴とするスポット溶接部の破断解析方法。
【請求項2】
注目シェル要素の線分に隣接するシェル要素が存在するか否かを検索する工程と、
隣接するシェル要素が存在した場合、この注目シェル要素の法線ベクトルと隣接するシェル要素の法線ベクトルのなす角θが閾値以上であるか否かを判定する工程と、
前記なす角θが閾値以上であった場合、隣接するシェル要素が存在する注目シェル要素の線分を、母材の稜線とする工程と、をさらに含み、
共通の母材に属するすべてのシェル要素に対して、隣接するシェル要素が存在するか否かの検索を実行することを特徴とする請求項1に記載のスポット溶接部の破断解析方法。
【請求項3】
注目シェル要素の線分に隣接するシェル要素が存在するか否かを検索する工程と、
隣接するシェル要素が存在しなかった場合、この注目シェル要素の線分を母材のエッジとする工程と、をさらに含み、
共通の母材に属するすべてのシェル要素に対して、隣接するシェル要素が存在するか否かの検索を実行することを特徴とする請求項1又は2に記載のスポット溶接部の破断解析方法。
【請求項4】
前記なす角θの閾値が10度であることを特徴とする請求項2に記載のスポット溶接部の破断解析方法。
【請求項5】
注目バー要素に最も近いバー要素までの距離を抽出して、スポット間距離L1の情報を取得する工程と、前記注目バー要素の端点に最も近い距離にあるシェル要素のエッジを検索し、エッジ間距離L2の情報を取得する工程と、前記注目バー要素の端点に最も近い距離にあるシェル要素の稜線を検索し、稜線間距離L3の情報を取得する工程と、前記スポット間距離L1、エッジ間距離L2を2倍した距離、稜線間距離L3を2倍した距離のうち、最も短い距離を有効幅Bに決定する工程と、前記決定した有効幅Bを破断解析に用いる工程と、を含む破断解析処理をコンピューターに実行させることを特徴とするスポット溶接部の破断解析コンピュータープログラム。
【請求項6】
注目バー要素に最も近いバー要素までの距離を抽出して、スポット間距離L1の情報を取得する手段と、前記注目バー要素の端点に最も近い距離にあるシェル要素のエッジを検索し、エッジ間距離L2の情報を取得する手段と、前記注目バー要素の端点に最も近い距離にあるシェル要素の稜線を検索し、稜線間距離L3の情報を取得する手段と、前記スポット間距離L1、エッジ間距離L2を2倍した距離、稜線間距離L3を2倍した距離のうち、最も短い距離を有効幅Bに決定する手段と、前記決定した有効幅Bを破断解析に用いる手段と、を備えたことを特徴とするスポット溶接部の破断解析装置。
【請求項1】
注目バー要素に最も近いバー要素までの距離を抽出して、スポット間距離L1の情報を取得する工程と、
前記注目バー要素の端点に最も近い距離にある母材のエッジを検索し、エッジ間距離L2の情報を取得する工程と、
前記注目バー要素の端点に最も近い距離にある母材の稜線を検索し、稜線間距離L3の情報を取得する工程と、
前記スポット間距離L1、エッジ間距離L2を2倍した距離、稜線間距離L3を2倍した距離のうち、最も短い距離をスポット溶接の有効幅Bに決定する工程と、
前記決定した有効幅Bを破断解析に用いる工程と、を含むことを特徴とするスポット溶接部の破断解析方法。
【請求項2】
注目シェル要素の線分に隣接するシェル要素が存在するか否かを検索する工程と、
隣接するシェル要素が存在した場合、この注目シェル要素の法線ベクトルと隣接するシェル要素の法線ベクトルのなす角θが閾値以上であるか否かを判定する工程と、
前記なす角θが閾値以上であった場合、隣接するシェル要素が存在する注目シェル要素の線分を、母材の稜線とする工程と、をさらに含み、
共通の母材に属するすべてのシェル要素に対して、隣接するシェル要素が存在するか否かの検索を実行することを特徴とする請求項1に記載のスポット溶接部の破断解析方法。
【請求項3】
注目シェル要素の線分に隣接するシェル要素が存在するか否かを検索する工程と、
隣接するシェル要素が存在しなかった場合、この注目シェル要素の線分を母材のエッジとする工程と、をさらに含み、
共通の母材に属するすべてのシェル要素に対して、隣接するシェル要素が存在するか否かの検索を実行することを特徴とする請求項1又は2に記載のスポット溶接部の破断解析方法。
【請求項4】
前記なす角θの閾値が10度であることを特徴とする請求項2に記載のスポット溶接部の破断解析方法。
【請求項5】
注目バー要素に最も近いバー要素までの距離を抽出して、スポット間距離L1の情報を取得する工程と、前記注目バー要素の端点に最も近い距離にあるシェル要素のエッジを検索し、エッジ間距離L2の情報を取得する工程と、前記注目バー要素の端点に最も近い距離にあるシェル要素の稜線を検索し、稜線間距離L3の情報を取得する工程と、前記スポット間距離L1、エッジ間距離L2を2倍した距離、稜線間距離L3を2倍した距離のうち、最も短い距離を有効幅Bに決定する工程と、前記決定した有効幅Bを破断解析に用いる工程と、を含む破断解析処理をコンピューターに実行させることを特徴とするスポット溶接部の破断解析コンピュータープログラム。
【請求項6】
注目バー要素に最も近いバー要素までの距離を抽出して、スポット間距離L1の情報を取得する手段と、前記注目バー要素の端点に最も近い距離にあるシェル要素のエッジを検索し、エッジ間距離L2の情報を取得する手段と、前記注目バー要素の端点に最も近い距離にあるシェル要素の稜線を検索し、稜線間距離L3の情報を取得する手段と、前記スポット間距離L1、エッジ間距離L2を2倍した距離、稜線間距離L3を2倍した距離のうち、最も短い距離を有効幅Bに決定する手段と、前記決定した有効幅Bを破断解析に用いる手段と、を備えたことを特徴とするスポット溶接部の破断解析装置。
【図1】

【図3】
【図4】
【図5】
【図6】
【図8】
【図9】
【図10】
【図2】
【図7】
【図11】
【図12】
【図3】
【図4】
【図5】
【図6】
【図8】
【図9】
【図10】
【図2】
【図7】
【図11】
【図12】
【公開番号】特開2013−83562(P2013−83562A)
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願番号】特願2011−223972(P2011−223972)
【出願日】平成23年10月11日(2011.10.11)
【出願人】(000006655)新日鐵住金株式会社 (6,474)
【Fターム(参考)】
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願日】平成23年10月11日(2011.10.11)
【出願人】(000006655)新日鐵住金株式会社 (6,474)
【Fターム(参考)】
[ Back to top ]