
スライド操作装置
【課題】ミキシングコンソールのフェーダなどのスライドボリューム装置において、スライド操作子への加圧力に対して、磁気式センサ23での検出精度を確保する。
【解決手段】移動ブロック2を、互いに平行な主移動ガイド体11と副移動ガイド体12で摺動自在に保持する。主移動ガイド体11を棒状のステンレスシャフトとする。副移動ガイド12を非磁性ステンレスのシャフト12aと磁性部材12bでインサート成型する。磁気式センサ23で磁性部材12bの磁極パターンを検出する。移動ブロック2の副ガイド孔22の上下方向のクリアランスを主ガイド孔21の上下方向のクリアランスより大きくする。主移動ガイド体11でスライド方向にガイドし、副移動ガイド体12で移動ブロック2の横揺れを防止する。
【解決手段】移動ブロック2を、互いに平行な主移動ガイド体11と副移動ガイド体12で摺動自在に保持する。主移動ガイド体11を棒状のステンレスシャフトとする。副移動ガイド12を非磁性ステンレスのシャフト12aと磁性部材12bでインサート成型する。磁気式センサ23で磁性部材12bの磁極パターンを検出する。移動ブロック2の副ガイド孔22の上下方向のクリアランスを主ガイド孔21の上下方向のクリアランスより大きくする。主移動ガイド体11でスライド方向にガイドし、副移動ガイド体12で移動ブロック2の横揺れを防止する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、スライド操作子等の操作で移動部を摺動移動してパラメータ等を設定するのに適したスライド操作装置に関する。
【背景技術】
【0002】
従来、ミキシングコンソールは放送局、レコーディングスタジオ、コンサート会場等で使用され、各種の楽器やボーカル等の音声信号をプレイヤー用のモニタやミキサ用のモニタ等として出力するために、多くの信号に対して各種の制御(信号処理)を行う必要がある。このため、操作パネルには各種の多数の操作子が配設されているが、操作パネルの操作性を向上させて、操作者の負担を軽減することが要求される。
【0003】
例えば、特開平9−198953号公報には複数のフェーダ摘みに対して、赤、緑、黄色などの如く色を異ならせ、色を識別することでフェーダ摘みの位置などがわかるようにした技術が開示されている。このように、色により視覚的に操作子を識別できると多数の操作子を操作する場合に操作者の負担を軽減することができる。
【特許文献1】特開平9−198953号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
上記フェーダ摘みのようなスライド操作子を操作するようなスライドボリューム装置では、操作子を操作するときに操作子にある程度の加圧力が加えられる。特に、素早く操作するときに強い加圧力が加えられることがある。
【0005】
しかし、スライドボリューム装置は、スライド操作子に連動する内部の移動部の移動位置をセンサ等で検出するため、このスライド操作子に加えられる加圧力がセンサの検出精度に影響を与える可能性がある。さらに、加圧力が強すぎるとスライドボリューム装置自体の破壊を招きかねない。またさらに、加圧力が強すぎるとセンシング作用がうまく働かず、センシング精度が落ちることもある。
【0006】
本発明は、スライド操作子等の操作で該操作状態に対応する移動信号を得るスライド操作装置において、操作時の加圧力のセンサ検出精度への影響を低減するとともに、装置全体に対する垂直荷重の対策を施すことを課題とする。
【課題を解決するための手段】
【0007】
請求項1のスライド操作装置は、移動部が固定部に設けた移動ガイドによってガイドされて移動するとき、センシング手段は操作状態をセンシングする。センシング手段は移動ガイドそのものと、移動部に設けられ該移動ガイドをセンシングして移動信号を出力する検出部とからなる。そして、検出部を、前記移動部を移動させるときに加圧する方向と反対方向に対峙して設けるようにした。これにより、移動部が加圧され、移動ガイドが仮に撓んでも、該移動ガイドと検出部との距離が保持されるので、センサ当の検出部の検出精度が確保される。また、操作感(摺動フィーリング)が向上するとともに、装置全体に対する垂直荷重への対策となる。なお、「移動信号」とは、周波数が移動部の移動速度に比例するパルス信号(実施形態の例)、移動部の移動量を示す信号(データ)、移動した位置を示す信号(データ)、移動時の速度を示す信号(データ)、移動時の加速度を示す信号(データ)等の何れの信号でもよく、移動部の移動状態に応じた各種の信号である。また、移動信号が上記パルス信号であって、このパルス信号から移動部の移動量、移動した位置、移動時の速度、移動時の加速度を求めるようにしてもよい。
【0008】
請求項2のスライド操作装置は、移動部が固定部に設けた移動ガイドによってガイドされて移動するとき、この移動部に設けた検出部が移動ガイドをセンシングして移動信号を出力する。移動部は、該移動部を移動させるときに加圧する方向に前記移動ガイドに当接する当接部を有する構造で、検出部は、上記加圧する方向に対向するように、移動ガイドを介した前記移動部の部位に設けるようにした。これにより、移動部が加圧されても、当接部が移動ガイドに当接して検出部と移動ガイドとの距離が保持され、検出部の検出精度が確保される。また、操作感(摺動フィーリング)が向上するとともに、装置全体に対する垂直荷重への対策となる。なお、当接部は移動体の移動方向に離間して2つ設けるのが好ましいが、1つでもよい。また、移動ガイドは2条で構成されていてもよい。
【0009】
請求項3のスライド操作装置は、請求項1または2記載のスライド操作装置において、前記移動ガイドに、多数分極した磁極を該移動ガイドの長手方向に形成したマーキング処理部を有し、このマーキング処理部の磁極の磁界を磁気式センサで検出するようにした。
【0010】
請求項4のスライド操作装置は、請求項1または2記載のスライド操作装置において、前記移動ガイドに、濃淡のパターンを該移動ガイドの長手方向に形成したマーキング処理部を有し、このマーキング処理部のパターンを光学式センサで検出するようにした。
【0011】
請求項5のスライド操作装置は、請求項1、2、3または4記載のスライド操作装置において、移動部に取り付けられたスライド操作子に発光体を設けるようにした。
【0012】
請求項6のスライド操作装置は、請求項1、2、3、4または5記載のスライド操作装置において、検出部に接続されるリード線(例えばフラットケーブル)を取り出すリード線取り出し口を移動部の移動方向の中央に設け、このリード線取り出し口から移動部までに位置する内部リード線の長さを最小限にするようにした。これにより、移動部の移動によって内部リード線が撓むような場合でも、この撓んだ内部リード線の部分をリード線取り出し口から外部に引き出す必要がなく該リード線をリード線取り出し口から外の部分で固定(あるいは仮固定)することもできるので、当該スライド操作装置の外側でリード線を撓ませるようなこともない。発明の詳細な説明のここまでは、「検出器」を「検出部」と変更した以外は先の出願(特願2004−199128)の記載のままであり、この先の出願において操作時の加圧力のセンサ検出精度への影響を低減でき、装置全体に対する垂直荷重の対策が施されているが、発明者はさらに作用効果を奏するものとして以下の発明をなした。また、「センシング手段」や「検出器」は「マーキング処理部」と「検出部」とを有するものであることを明確にしている。
【0013】
請求項7のスライド操作装置は、互いに平行な第1及び第2の移動ガイド体の2条からなる移動ガイド部を設け、いずれか一方の移動ガイド体(実施形態における副移動ガイド体)に、検出器の一部としてその長手方向にマーキング処理が施されたマーキング処理部を形成し、移動部が前記移動ガイド部によってガイドされその長手方向に移動することで前記マーキング処理部に対して対向移動されることによって前記移動信号を発生する検出部を前記移動部に設け、移動部を移動ガイド部によってその長手方向にガイドし、この移動部が移動するときマーキング処理から移動信号を発生する検出部を移動部に設け、前記いずれか一方の移動ガイド体は前記検出部の移動ガイド体対向部に対する対向面にその長手方向に沿って前記マーキング処理を施すようにした。各請求項において「いずれか一方の移動ガイド体」はマーキング処理部を有する方の移動ガイド体である。
【0014】
請求項8のスライド操作装置は、請求項7に記載のスライド操作装置であって、前記検出部の一部としての検出部を、前記移動部を移動させるときに加圧する方向に向けて、前記いずれか一方の移動ガイド体を介した前記移動部の部位に設けるようにした。
【0015】
請求項9のスライド操作装置は、請求項7または8に記載のスライド操作装置であって、移動部を、前記いずれか一方の移動ガイド体を貫通する第1のガイド孔(副ガイド孔)と前記他方の移動ガイド体を貫通する第2のガイド孔(主ガイド孔)とを有し、前記第1のガイド孔のほうが前記第2のガイド孔よりも、前記移動部を移動させるときに加圧する加圧方向に大きなクリアランスを有する構成とした。
【0016】
請求項10のスライド操作装置は、請求項9に記載のスライド操作装置であって、前記第2のガイド孔における前記加圧方向のクリアランスを、前記第1のガイド孔における前記加圧方向のクリアランスより小さくするようにした。
【0017】
請求項11のスライド操作装置は、請求項7乃至10のいずれか一項に記載のスライド操作装置であって、前記いずれか一方の移動ガイド体は、棒状の剛性を有する非磁性体(ステンレス棒等の金属棒、セラミック棒、カーボン棒等からなる非磁性体)を主軸とする主部と、該主部の長手方向に沿って設けた着磁スケールを施したマーキング処理部としての副部とからなる構成とした。
【0018】
好適なスライド操作装置として、請求項11において、前記マーキング処理部は、前記主部の最外殻部内に施され、着磁フェライト材と該フェライト素材粉末体を結合する結合体材とからなる合成体からなる着磁性体で構成するとよい。
【発明の効果】
【0019】
請求項1または2によれば、検出器の良好な検出精度が得られるとともに、操作感(摺動フィーリング)が向上し、さらに、スライド操作装置全体に対する垂直荷重への対策ともなる。
【0020】
請求項3によれば、請求項1または2の効果に加えて、磁気式で検出を行っているので、磁気式センサのセンシング面や磁極を形成した部分が汚れたり、センシング面と磁極を形成した部分とのギャップに埃が入ったりしても検出精度が低下することがなく、汚れや埃に強いスライド操作装置が得られる。
【0021】
請求項4によれば、光学式センサにおいて請求項1または2の効果が得られる。
【0022】
請求項5によれば、請求項1、2、3または4の効果に加えて、スライド操作子に設けた発光体の発光により該スライド操作装置に対して割り当てられた機能等を色的に識別し得るので、直感的に素早い操作ができるなど操作性を高めることができる。
【0023】
請求項6によれば、請求項1、2、3、4または5の効果に加えて、リード線(フラットケーブル等)がリード線取り出し口の外でブラブラしないので、当該スライド操作装置の、該スライド操作装置を搭載する本体機器内での収まりが良くなる。
【0024】
請求項7によれば、互いに平行な第1及び第2の移動ガイド体の2条からなる移動ガイド部を備えているので、移動部のスライド操作が安定し、操作時の検出器のセンサ検出精度への影響を低減することができる。
【0025】
請求項8によれば、移動部をマーキング処理部に対して、移動させるときに加圧する方向に向けて設けてあるので、強い加圧力で移動ガイド体に撓みが生じても、検出部のガイド体対向部がマーキング処理部に近づいて検出器の検出感度が上がるように作用するので、上記加圧力による撓み等が検出精度に何ら影響しない。
【0026】
請求項9によれば、請求項7または8の効果に加えて、移動部と移動ガイド部とのクリアランスとして、第1のガイド孔(副ガイド孔)のほうが第2のガイド孔(主ガイド孔)よりも加圧方向に大きなクリアランスを有するので、強い加圧力で移動ガイド体に撓みが生じても副ガイド孔がマーキング処理部に接触することなく、マーキング処理部の摩耗等を防止でき、かつ、検出部のガイド体対向部がマーキング処理部に近づいて検出器の検出感度が上がるように作用するので、上記加圧力による撓み等が検出精度に何ら影響しない。
【0027】
請求項10によれば、請求項9の効果に加えて、第2のガイド孔とこれに対応する移動ガイド体により、移動部に対する加圧方向のガタが無くなり、スライド操作の操作性が良くなるとともに、第1のガイド孔とこれに対応する移動ガイド体(いずれか一方の移動ガイド体)との左右方向のクリアランスを小さくして、移動部の左右方向の揺れを防止できる。
【0028】
請求項11によれば、請求項7乃至10のいずれか一項の効果に加えて、前記いずれか一方の移動ガイド体は、主部が棒状の剛性を有するので、例えばフェライト等の脆さを補いながら、副部によりマーキング処理部の着磁スケールの磁気の強度を確保できるので、堅牢で安定した検出精度を有するスライド操作装置を得ることができる。
【発明を実施するための最良の形態】
【0029】
以下、図面を参照して本発明の実施形態について説明する。図11は実施形態のスライド操作装置(後述の第1〜第5実施例のスライドボリューム装置)を用いたミキシングコンソールのパネル面100の全体図である。なお、このパネル面100の説明ではパネル面100を正面から見た状態での上下左右で方向を示す。パネル面100には、マイク入力やライン入力等のモノラル入力チャンネルの入力レベルを調整するボリューム操作子50、チャンネルオンスイッチの操作ボタン60、入力チャンネルの設置内容等を表示する液晶ディスプレイ70、実施形態の複数のスライド操作装置の各々に対応する複数のスライド操作子61からなるスライド操作子群80等が設けられている。
【0030】
このスライド操作子群80は、例えば、入力信号や出力信号の周波数特性を設定するためにグラフィックイコライザのような操作をしてフィルタ特性に対応する各パラメータを設定したり、入力レベルや出力レベルを調整するフェーダとしてパラメータを設定するなど、各種のパラメータの設定に利用する。すなわち、スライド操作子群80の機能を、複数機能の中から選択して切り換えることで多くのパラメータを設定することができる。
【0031】
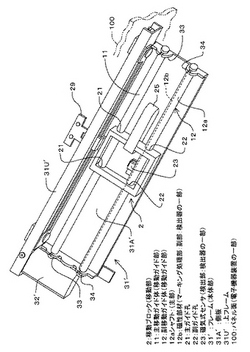
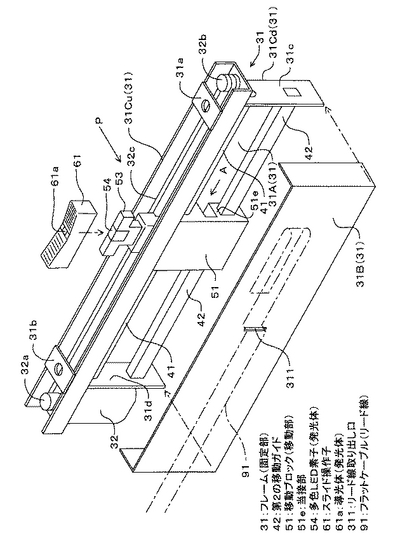
図2はスライド操作装置としての第1実施例のスライドボリューム装置の要部分解斜視図である。このスライドボリューム装置は、前記パネル面100に対してその裏側で直角面を成す側板31A,31Bと、2つの断面コ字状のフレーム31Cu,31Cdとにより「固定部」としてのフレーム31が形成されている。フレーム31Cdは側板31A,31Bの上端及び両端を上から囲うように取り付けられ、フレーム31Cuはこのフレーム31Cdの上に取り付けられる。そして、上側のフレーム31Cuの一端にはモータ32が取り付けられるつともに、この上側のフレーム31Cuの両側の止め金具31a,31bによりフレーム31全体が前面パネル100の裏面に取り付けられる。また、下側のフレーム31Cdの両端の端面31c,31d間には、側板31Aの長手方向に沿って互いに平行な第1の移動ガイド41と第2の移動ガイド42とが掛け渡されて取り付けられている。第1の移動ガイド41は丸棒状の金属部材、第2の移動ガイド42は角棒状の金属部材であり、この第1及び第2の移動ガイド41,42には、「移動部」としての移動ブロック51が該移動ガイド41,42の長手方向に摺動自在となるように取り付けられている。この第1実施例では、「第1及び第2の移動ガイドの両方」または「第2の移動ガイド」が請求項の「移動ガイド」に相当する。
【0032】
フレーム31Cuの片側に配設されたモータ32の駆動軸には駆動プーリ32aが取り付けられ、さらにフレーム31Cuの他端には従動プーリ32bが配設されている。駆動プーリ32aと従動プーリ32bにはタイミングベルト32cが巻回されており、このタイミングベルト32cの一箇所に移動ブロック51の上部が取り付けられている。これにより、モータ32の正逆回転により移動ブロック51は第1及び第2の移動ガイド41,42に沿って往復移動する。これは、例えば該スライドボリューム装置(フェーダ)に別のチャンネルをアサインしたり別の機能にアサインしたときにそのパラメータに対応するように、スライド操作子61の位置を自動設定するときの動作である。
【0033】
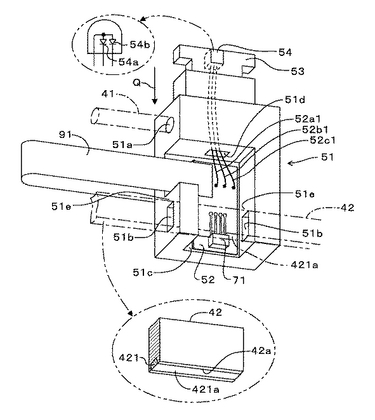
図1は移動ブロック51の要部斜視図であり、図2におけるP矢印の方から見た状態を示している。移動ブロック51には、第1の移動ガイド41が嵌挿される軸孔51aと、第2の移動ガイド42が嵌挿される軸孔51b,51bが形成され、さらに第2の移動ガイド42から離間するように軸孔51b,51bよりも窪んだ面として基板収容部51cが形成されている。基板収容部51cは後述のセンサが固着される基板52が固定されるもので、この基板52にはフラットケーブル91の一端が接続されるとともに、導線52a1,52b1,52c1が接続されている。この導線52a1,52b1,52c1は透孔51dを通ってレバー53に取り付けられた多色LED素子54に接続されている。そして、図2に示したように、レバー53には多色LED素子54の上部発光面に対向する導光体61aを有するスライド操作子61が取り付けられている。なお、多色LED素子54と導光体61aが「発光体」に相当する。
【0034】
図1の二点鎖線の吹き出し部に図示したように、第2の移動ガイド42の下面には長手方向の略全長に亘って溝42aが形成されており、この溝42a内にラバー製の磁性部材421が填め込まれている。この磁性部材421は長手方向にN極とS極とを交互に細かく(例えば400μm周期で)分極して磁極を形成したもの(いわゆる「マグネスケール」)である。あるいは、溝を設けない第2の移動ガイド42そのものが金属酸化物からなるフェライト磁石を形成していてもよい。これらの磁極を形成したパターンが「マーキング処理部」に相当する。また、基板52上にはホール素子を含むIC等で形成した「検出器」としての磁気式センサ71(または、MRセンサ)が搭載されており、この磁気式センサ71のセンシング面は磁性部材421の磁極面421aに対して僅かなギャップ(間隔)を設けて対面している。さらに、この磁気式センサ71の出力線と、前記多色LED素子54の導線52a1,52b1,52c1は、基板52に取り付けられたフラットケーブル91を介して外部に接続されている。そして、このフラットケーブル91から供給される電流により多色LED54は発光する。また、フラットケーブル91を介して磁気式センサ71へ通電されるとともに、この磁気式センサ71の検出信号(「移動信号」)はフラットケーブル91を介して図示しない回路に送られる。
【0035】
すなわち、移動ブロック51の移動に伴って、磁気式センサ71が磁性部材421の磁極面421aに対して移動すると、この磁気式センサ71は磁極面421aのN極とS極の極性の反転に対応するパルス信号を出力する。そして、このパルス信号の数により、移動ブロック51の移動量(長さ)を検出することができる。また、磁極面421aの磁極は例えば2列からなり、この磁極のパターンは第2の移動ガイド42の長手方向にその位相が1/2π相当ずれており、磁気式センサ71は位相のずれたパルス信号を出力するので、この位相のずれの正逆の方向により、移動ブロック51の移動方向が判明する。あるいは、磁極パターンは位相ずれのないNSNS…のパターンからなるもので、センサの検出極部を1/2π相当ずらして配置するようにしてもよい。さらに、移動ブロック51の移動前の位置の位置情報は図示しない制御回路等により常に記憶されているので、この位置情報と上記移動量及び移動方向とにより、スライドボリューム装置全体での移動ブロック51の位置すなわちスライド操作子61の位置が検出される。
【0036】
ここで、スライド操作子61を手動操作して移動ブロック51を移動(摺動)させる時、一般に図1の矢印Qで示す方向に移動ブロック51は加圧される。これに対して、移動ブロック51の軸孔51b,51bの上部は、この加圧する方向に前記第2の移動ガイド42の上端面(磁性部材421と反対側の面)に当接する当接部51eとなっている。少しの力で加圧しても、第1及び第2の移動ガイド41,42によって、移動ブロック51は下がらないようになっているが、強い力で加圧して移動ブロック51が下がるようになったとしても、当接部51eにより第2移動ガイド42も共に下がるので、第2の移動ガイド42の磁性部材421の磁極面421aと磁気式センサ71のセンシング面とのギャップ(間隙)が一定に保たれる。これにより、磁気式センサ71の検出信号として安定した信号を得ることができ、検出精度が確保される。なお、上記ギャップが変動すると検出信号のレベル等が変化して検出精度が低下するが、上記実施例によりこのようなことがない。
【0037】
このように、磁気式センサ(検出器)71が、この磁気式センサ71を設けた移動ブロック(移動部)51を保持する移動ガイド42をセンシングするようになっているので、例えばフレーム31の側板31A(または31B)等に設けたマーキング処理部等を検出するような場合よりも格段に検出精度が向上する。すなわち、このように側板31A(または31B)等に設けたマーキング処理部を検出するような場合には、加圧力により移動ブロック51が下がると、そのまま検出精度に影響するが、上記実施形態ではこのようなことがない。
【0038】
また、上記実施例のように磁気式で検出を行っているので、磁気式センサ71のセンシング面や磁性部材421の磁性面421aが汚れたり、ギャップに埃が入ったりしても検出精度が低下することがなく、汚れや埃に強いスライドボリューム装置が得られる。
【0039】
また、図2に示したように、側板31Bには、移動ブロック51の移動方向の中央(側板31Bの長手方向の中央)に縦長のリード線取り出し口311が形成されている。そして、前記磁気式センサ71及び多色LED素子54に接続されるフラットケーブル91(リード線)は、基板52から引き出して180°折返し、さらにリード線取り出し口311から側板31Bの外部に引き出されている。すなわち、リード線取り出し口311が中央にあるので、フラットケーブル91のリード線取り出し口311から内部にある部分の長さは移動ブロック51の全摺動範囲の略半分で良く、さらにそれを折返して配設しているので、フラットケーブル91をケース31内に容易に収容できる。したがって、フラットケーブル91はリード線取り出し口311の部分で軽く固定することもでき、移動ブロック51が移動しても、側板31Bの外側からみてフラットケーブル91が、通常のプリンタのヘッドに接続されたケーブルのようにはブラブラしないので、当該スライドボリューム装置の機器内での収まりが良くなる。
【0040】
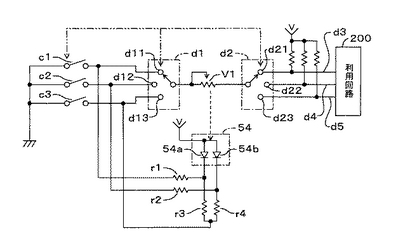
図12は上記スライドボリューム装置を用いたパラメータ設定装置の回路図である。この回路はスライドボリューム装置を複数(この例では3つ)の異なる機能に切り換え設定する回路であり、図示しない機能選択スイッチに連動するスイッチ回路c1,c2,c3、セレクタ回路d1,d2を備えている。なお図12は一つのスライドボリューム装置に対応する回路として示してあるが、前記スライド操作子群80の複数の操作子61に対応する複数のスライドボリューム装置についても同様の回路である。そして、機能選択スイッチで選択された同じ機能が他のスライドボリューム装置にも設定されるが、以下、一つのスライドボリューム装置について説明する。
【0041】
スイッチ回路c1,c2,c3の一端は接地(アース)されており、他端はセレクタ回路d1の選択端子d11,d12,d13にそれぞれ接続されている。また、セレクタ回路d1,d2の共通接点の間にボリューム回路V1が接続されている。このボリューム回路V1は前記スライドボリューム装置における検出信号に応じて抵抗が設定される電子ボリュームである。セレクタ回路d2の選択端子d21,d22,d23は基準電圧と利用回路200に並列に接続されている。なお、この利用回路200に並列に接続される信号線d3,d4,d5は、それぞれ電圧信号を該利用回路200において機能(1),(2),(3)に応じてそれぞれ所要の箇所にパラメータとして供給するものである。また、前記多色LED素子54の赤色LED54a,緑色LED54bの一端は基準電圧に接続され、それぞれ他端は、抵抗r1,r2、スイッチ回路c1,c2を介してそれぞれ接地されるとともに抵抗r3,r4、スイッチ回路c3を介して共通に接地される。
【0042】
機能(1)を選択すると、スイッチ回路c1がオン(閉成)されるとともに、セレクタd1の選択端子d11とセレクタd2の選択端子d21がそれぞれボリューム回路V1に接続される。機能(2)を選択すると、スイッチ回路c2がオン(閉成)されるとともに、セレクタd1の選択端子d12とセレクタd2の選択端子d22がそれぞれボリューム回路V1に接続される。さらに、機能(3)を選択すると、スイッチ回路c3がオン(閉成)されるとともに、セレクタd1の選択端子d13とセレクタd2の選択端子d23がそれぞれボリューム回路V1に接続される。したがって、スライドボリューム装置の操作により、ボリューム回路V1の抵抗値に応じた電圧信号が発生するが、この電圧信号は、機能(1)のとき信号線d3から、機能(2)のとき信号線d4から、機能(3)のとき信号線d5からそれぞれ利用回路200に供給される。
【0043】
また、機能(1)のとき赤色LED54aのみが点灯し、機能(2)のとき緑色LED54bのみが点灯する。また、機能(3)のときとき赤色LED54aと緑色LED54bの両方が点灯する。これにより、スライド操作子61の導光体61aは機能(1)のとき「赤色」、機能(2)のとき「緑色」、機能(3)のとき「黄色(赤+緑)」に発光し、この導光体61aの発光色により、現在どの機能が選択されているかを容易に確認することができる。
【0044】
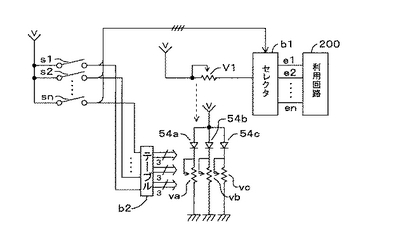
以上の実施例では多色LED素子54が赤色LED54a,緑色LED54bの2つのLEDの場合について説明したが、赤色LED54a、緑色LED54b、青色LED54cの3色を備えた多色LED素子を用いてもよい。この場合、各LEDの輝度を制御することで多くの色で発色させることができ、多数の機能を選択する場合に適している。図13は多数の機能を選択する場合のパラメータ設定装置の回路図である。機能を選択する図示しない複数の操作子に対応するスイッチ回路s1、s2、…、snが基準電圧Vに並列に接続され、これらのスイッチ回路s1、s2、…、snのオン信号はHレベル信号、オフ信号はLレベル信号となり、これらのオン/オフ信号は複数ビットのビット信号としてセレクタb1とテーブルb2に入力される。なお、スイッチ回路s1、s2、…、snは対応する操作子により択一的にオンとなり、このビット信号は1つのビットがHレベルで、他のビットはLレベルとなる。
【0045】
また、前記スライドボリューム装置によって駆動されるボリューム回路V1が基準電圧Vに接続され、ボリューム回路V1の抵抗値に応じた電圧信号がセレクタb1に入力される。セレクタb1の出力e1、e2、…、enはスイッチ回路s1、s2、…、snに各々対応しており、このセレクタb1は、スイッチ回路s1、s2、…、snからのビット信号により出力e1、e2、…、enを択一的に選択し、各機能に応じたボリューム回路V1の電圧信号を利用回路200に供給する。
【0046】
一方、テーブルb2は、スイッチ回路s1、s2、…、snから入力されるビット信号を例えば3ビットからなる3つのビット信号に変換する回路であり、この出力される3つのビット信号はスイッチ回路s1、s2、…、snで選択された機能に割り当てた色に対応するビット信号となる。そしてこの3ビットの3つのビット信号は赤色LED54a、緑色LED54b、青色LED54cへの供給電流を制御する電子ボリューム回路va,vb,vcにそれぞれ供給される。これにより、赤色LED54a、緑色LED54b、青色LED54cは各対応するビット信号が示す輝度で発光する。なお、この例では、各ビット信号は3ビットで“0〜7”の輝度に対応する数値データであり、赤色LED54a、緑色LED54b、青色LED54cの3色の輝度の組み合わせにより、非点灯(黒)を含めて512色で発光させることができる。
【0047】
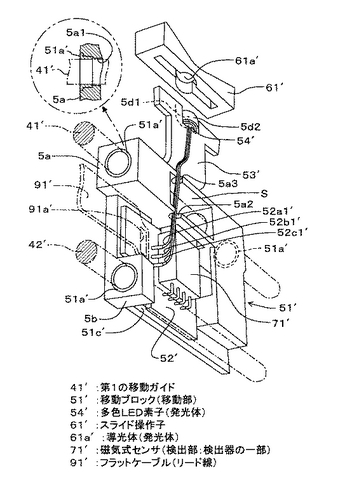
図3はスライド操作装置としての第2実施例のスライドボリューム装置の要部斜視図であり、第1実施例の図2におけるP矢印の方から見た状態に対応している。なお、第1実施例の要素と対応する要素には第1実施例と同数字符号に「′」を付記する。この第2実施例では、第1,第2の移動ガイド41′,42′を両方とも丸棒状の金属部材とし、この第1,第2の移動ガイド41′,42′に「移動部」としての移動ブロック51′が移動ガイド41′,42′の長手方向に摺動自在となるように取り付けられている。この第2実施例も前記側板31A,31B、フレーム31Cu,31Cdで構成されるフレーム31が「固定部」である。
【0048】
この第2実施例における移動ブロック51′は、上辺のガイド保持部5aの中央に矩形の空間(孔)Sが形成されている。なお、この空間Sは当該移動ブロック51′の形成を容易にしているが、なくてもよい。図3の二点鎖線の吹き出し部に一部図示したように、ガイド保持部5aの両端には該空間Sに貫通する保持孔5a1がそれぞれ形成され、この保持孔に保持輪51a′,51a′が取り付けられている。ガイド保持部5aの下面側部から下方には基板保持部51c′を有し、この基板保持部51c′の下部片側のガイド保持部5bには保持孔が形成されるとともにこの保持孔に保持輪51b′が取り付けられている。そして、第1の移動ガイド41′が、保持輪51a′,51a′と空間Sを介してガイド保持部5aを貫通するように嵌挿されてる。また第2の移動ガイド42′が保持輪51b′を介してガイド保持部5bを貫通するように嵌挿されてる。各保持輪51a′,51a′,51b′の内面は滑らかに仕上げられており、移動ブロック51′が移動ガイド41′,42′に沿って移動するとき滑らかに移動する。
【0049】
基板保持部51c′には基板52′が取り付けられ、この基板52′には「検出器」としての磁気式センサ71′が取り付けられている。また、基板52′には、端子部91a′を介してフラットケーブル91′の一端が接続されるとともに、導線52a1′,52b1′,52c1′が接続されている。レバー53′の上端にはLED保持部5d1,5d2が形成されており、このLED保持部5d1,5d2には多色LED素子54′が取り付けられている。なお、LED保持部5d1,5d2は図6(第3実施例)の二点鎖線の吹き出し部に図示したように、上下段違いの半円弧状の形状で構成されている。導線52a1′,52b1′,52c1′はガイド保持部5aのフレーム31A用の対向部に設けた凹部5a2,5a3にゴム接着剤(引っぱれば引き剥がすことができる)にて接着係止され、LED保持部5d2まで導かれて、多色LED素子54′に接続されている。そして、レバー53′には多色LED素子54′の上部発光面に対向する導光体61a′を有するスライド操作子61′が取り付けられている。なお、多色LED素子54′と導光体61a′が「発光体」に相当する。
【0050】
また、磁気式センサ71′の出力線と、多色LED素子54′の導線52a1′,52b1′,52c1′は、基板52′に取り付けられたフラットケーブル91′を介して外部に接続されている。このフラットケーブル91′も第1実施例と同様にリード線取り出し口311から外部に引き出され、第1実施例と同様な効果が得られる。また、多色LED54′と磁気式センサ71′への通電、磁気式センサ71′からの検出信号の取り出しがフラットケーブル91′を介して行われることは第1実施例と同様である。なお、後述のように第1の移動ガイド41′にはマーキング処理部として磁極が形成されており、磁気式センサ71′の検出信号により移動ブロック51′(スライド操作子61′)の位置が検出される。
【0051】
第1の移動ガイド41′は、鉄を母材にし、ニッケル、コバルトを混合した合金で製造したものである。これにより、第1の移動ガイド41′は、鉄そのものの性質をそのまま残すことができ、折れにくく、わずかに曲がっても元に戻るようなバネ性を有する。すなわち、折れやすいフェライト磁石そのものをガイドとするよりも、移動ガイド41′は加圧力が加わっても折れにくく、装置の破壊を防止することができる。
【0052】
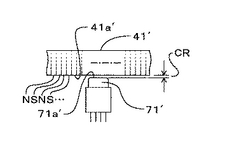
さらに、図4に示したように、第1の移動ガイド41′は、第1実施例と同様にマーキング処理部としてN極とS極とを交互に細かく磁極を多数形成した磁石となっている。例えば、磁極はN極とN極の間が100μmピッチ(N極とS極間は50μm)の高分解能磁石となっている。また、磁気式センサ71′は、ホール素子を含むIC等で形成したもの(または、MRセンサ)であり、この磁気式センサ71′のセンシング面71a′は第1の移動ガイド41′の磁極面41a′に対して例えば0.1〜0.2mm程度の僅かなクリアランスCR(間隔)を設けて対面している。そして、この磁極面41a′の磁界が磁気式センサ71′で検出され、検出信号(移動信号)が得られる。すなわち、第1の移動ガイド41′と磁気式センサ71′はセンシング手段を構成している。
【0053】
ここで、磁気式センサ71′が、この磁気式センサ71′を設けた移動ブロック51′を保持する移動ガイド41′自体をセンシングするようになっている。したがって、第1実施例と同様に、仮に、加圧力により移動ガイド41′が僅かに撓んで移動ブロック51′が下がっても、上記クリアランスCRは常に一定になるので、加圧力による検出精度への影響を無くすことができる。
【0054】
さらに、図4に点線で示したように、移動ガイド41′の磁極は、移動ガイド41′の内部よりも磁極面41a′の方が強い磁化を呈して形成されているが、この磁化の強さは小さくてよい。すなわち、クリアランスCRが一定なので、このクリアランスCRそのものを小さくすることができる。したがって、磁気式センサ71′の感度を仮にクリアランスを大とした場合と同じ感度に設定したとすると、このクリアランス大とした場合よりも着磁そのものが弱くてもよい。すなわち、磁極面41a′の磁化の強さは小さくてよい。この磁化の強さは、通常の加圧力あるいは通常の操作時に、磁気式センサ71′と磁極面41a′によるセンシングの不感帯や不動作域がないような最小の磁力に着磁するのみでよく、しかも強い加圧力が加えられたときでも安定したセンシングが得られる。このように、クリアランスCRを小にして、感度向上及び検出精度向上を実現している。なお、第2の移動ガイド42′と移動ブロック51′とのクリアランスは大きくても感度や精度に影響しないので、ある程度ラフに設計してもよく、コストを低減することもできる。
【0055】
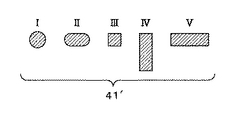
図5は移動ガイドの変形例を示す断面図である。以上の第2実施例の移動ガイド41′は(I)に示した丸棒状である。(II)は断面が横に平たい長円状の棒状の形状、(III )は断面が正方形の角棒状の形状、(IV)は断面が縦の長方形となる長尺板状の形状、(V)は断面が横の長方形となる長尺板状の形状をそれぞれ示している。移動ブロックにはこれらの移動ガイドの断面形状に整合する保持孔を設けるが、特に(IV),(V)の場合は移動ガイドは一つでよい。すなわち、第2の移動ガイド42′は移動ブロック51′が第1の移動ガイド41′を軸にして横方向に回動するのを防ぐような補助的な役割をしている。しかし上記の(IV),(V)の場合、その一つの移動ガイドだけで移動ブロックの回動を抑えることができ、第2の移動ガイド42′等を必要としない。
【0056】
また、第1の移動ガイド41′は、鉄を母材にし、ニッケル、コバルトを混合した合金で製造したので折れにくい移動ガイドともなっているが、軟鉄を上にしてその下にファライト磁石を貼り合わせて形成するようにしてもよい。このようにすると、図5に示した(II)〜(V)のいずれでも簡単に作ることができる。例えば、磁化方法も磁気式センサに向き合う面のみに磁化を施すだけでよいので、貼り合わせによって、下のファライト磁石が磁力低下となることはない。例えば、移動ガイド41′は、下の3%くらいしか磁化させず、上面の方は殆ど磁力はない。また、第1の移動ガイド41′は後述の実施例のよに剛性の高いステンレスシャフトと磁性部材でインサート成型して、移動ガイド41′を堅牢にしてもよい。これにより、フェライト等の脆さを補うことができ、かつ磁性の強度を確保することができる。
【0057】
なお、上記第2実施例において、移動ブロック51′の下側のガイド保持部5b及び保持輪51b′が第2の移動ガイド42′の全周に嵌合する構造になっているが、この移動ガイド42′に対して、ガイド保持部5b(及び保持輪51b′)の左右両側の何れか一方が開放されていても、側板があるので移動ガイド42′がガイド保持部5bから外れることがない。また、ガイド保持部5b(及び保持輪51b′)の下部が開放されていてもよい。このようにすると、組み立てが容易になる。さらに、下側のガイド保持部5bには保持輪51b′はなくてもよい。
【0058】
図6はスライド操作装置としての第3実施例のスライドボリューム装置の要部断面図であり、図2のA矢視断面に相当する。なお、第1及び第2実施例の要素と対応する要素には第1及び第2実施例と同数字符号に「″」を付記する。また、図6には後述の実施例に係る断面図も二点鎖線の吹き出し部に図示されている。この第3実施例では、移動ガイド41″は第2実施例の第1の移動ガイド41′と同様に、鉄を母材にし、ニッケル、コバルトを混合した合金で製造し、着磁して磁極面41a″を形成したものである。移動ガイド41″は、移動ブロック51″のガイド保持部5a″に形成しされた軸孔51a″を貫通し、この移動ブロック51″は図6に直交する方向に摺動自在に保持されている。また、移動ブロック51″の下部には凸条51b″が形成され、側板31A″,31B″の下部にはこの凸条51b″にそれぞれ対向する側壁42″,42″がそれぞれ形成されている。そして、この側壁42″,42″は移動ブロック51″の凸条51b″を図6に直交する方向にガイドし、第2実施例の第2の移動ガイド42′と同様の役割をする。
【0059】
移動ブロック51″には基板52″が取り付けられ、この基板52″に磁気式センサ71″が取り付けられている。基板52″に接続された導線52a1″,52b1″,52c1″は、レバー53″に沿って配線され、レバー53″の上端のLED保持部5d1,5d2に取り付けられた多色LED素子54″に接続されている。レバー53″には多色LED素子54″の上部発光面に対向する導光体61a″を有するスライド操作子61″が取り付けられている。なお、多色LED素子54″と導光体61a″が「発光体」に相当する。
【0060】
磁気式センサ71″は移動ブロック51″の図示しない開孔をとおして、移動ガイド41″の磁極面41a″に対面している。なお、側板31A″,31B″の上部には金属製のフレーム31Cu″が取り付けられ、このフレーム31Cu″の止め金具31a″,31b″により前面パネル100の裏面に固定される。また、基板52″にはフラットケーブル91″の一端が接続されている。そして、このフラットケーブル91″も第1実施例と同様に側板31B″の移動ブロック51″の移動方向の中央に形成されたリード線取り出し口311″から外部に引き出され、第1実施例と同様な効果が得られる。また、多色LED54″と磁気式センサ71″への通電、磁気式センサ71″からの検出信号の取り出しがフラットケーブル91″を介して行われることは第2実施例と同様である。
【0061】
この第3実施例においても、磁気式センサ71″が、移動ブロック51″を保持する移動ガイド41″自体をセンシングするので、第2実施例と同様に、加圧力により移動ガイド41″が僅かに撓んでも、磁気式センサ71″と磁極面41a″とのクリアランスは常に一定になるので、加圧力による検出精度への影響を無くすことができる。
【0062】
この第3実施例では、側板31A″,31B″を樹脂で構成しているので軽量化が図れる。また、第2の移動ガイドの役目を果たす側壁42″,42″と移動ブロック51″の凸条51b″とのクリアランスは大きくても感度や精度に影響しないので、樹脂にて構成してある程度ラフに設計してもよく、コストを低減することもできる。また、樹脂製の側板31A″,31B″を填め合わせてネジ1個でも固着が可能であるので、構造がシンプルで製造が容易である。
【0063】
以上の第3実施例では第2実施例における第2の移動ガイドの代わりに、側壁42″,42″と凸条51b″を設けるようにしているが、例えば両側板を金属板で形成し、この金属の絞り加工により、両側板に内側に出っ張る突条をそれぞれ形成し、この突条を移動ブロックの側面に摺接させて、該移動ブロックをガイドするようにしてもよい。
【0064】
以上の第2実施例および第3実施例の各スライドボリューム装置にあっても、図12あるいは図13の回路により、多色LED素子54′,54″の発光色を制御し、各スライドボリューム装置に設定された機能の確認を容易にすることができることは第1実施例と同様である。
【0065】
図7はスライド操作装置としての第4実施例のスライドボリューム装置の要部斜視図である。なお、以下の実施例において、副移動ガイド体12が「いずれか一方の移動ガイド体」であり、主移動ガイド体11が「他方の移動ガイド体」である。また、副ガイド孔22が「第1のガイド孔」であり、主ガイド孔21が「第2のガイド孔」である。このスライドボリューム装置は、前記パネル面100に対してその裏側で直角面を成す側板31A′と、断面コ字状の上フレーム31U′とにより「本体部」としてのフレーム31′が形成されている。なお、図11にパネル面100を示したミキシングコンソールが「電子機器装置」に相当する。上フレーム31U′の一端にはモータ32′が取り付けられている。また、側板31A′の両端には主ガイド体用爪33,33、副ガイド体用爪34,34が曲げ加工により起立されており、この主ガイド体用爪33,33間に主移動ガイド体11が、副ガイド体用爪34,34間には副移動ガイド体12が取り付けられている。この主移動ガイド体11と副移動ガイド体12は、側板31A′の長手方向に沿って互いに平行な2条からなる「移動ガイド部」を構成している。
【0066】
主移動ガイド体11は丸棒状のステンレス製のシャフトであり、副移動ガイド体12は後述説明するように非磁性ステンレス製のシャフトに磁性部材をインサート成型した丸棒状の部材で構成されている。主移動ガイド体11と副移動ガイド体12には、「移動部」としての移動ブロック2が主移動ガイド体11と副移動ガイド体12の長手方向に摺動自在となるように取り付けられている。また、移動ブロック2には図示しない操作子を填め込むためのレバー29が取り付けられている。なお、前記実施例と同様に、モータ32′はスライドボリューム装置のスライド操作子の位置を自動設定するために、移動ブロック2を往復移動するものである。
【0067】
図8は移動ブロック2の要部斜視図(図8(A) )及び副移動ガイド体12の断面図(図8(B) )、図9は移動ブロック2の一部側面と主移動ガイド体11及び副移動ガイド体12のクリアランスを説明する図である。なお、図9ではクリアランスの寸法を誇張して図示してある。移動ブロック2は樹脂成形されたものであり、ロ字状の枠体2aと基板取付部2bとで構成されており、この移動ブロック2の枠体2aの対向部分2a1,2a1には、上側に主移動ガイド体11が嵌挿される主ガイド孔21,21と、下側に副移動ガイド体12が嵌挿される副ガイド孔22,22がそれぞれ形成されている。基板取付部2bには検出部としての磁気式センサ23が固着される基板24が取り付けられ、この基板24にはフラットケーブル25が接続されている。
【0068】
副移動ガイド体12は、非磁性ステンレスの異形引き抜きにより形成された略丸棒状のシャフト(主部)12aと、該シャフト12aの長手方向に形成された溝12cに埋め込んだ磁性部材(副部)12bとで構成されている。図8(B) に示すように、溝12cの深さはシャフト12aの直径の4分の1程度であり、この溝12cの外周縁部12c1は丸みをもって形成されている。これにより、磁性部材12bのインサート成型後のひけ等により磁性部材12bとシャフト12aとの間に隙間ができるのを防止している。シャフト12aは非磁性であるが、磁性部材12bはPPS樹脂(ポリフェニレンスルフィド樹脂)とフェライト粒子とを混合した(練り込んだ)ものである。そして、この磁性部材12bには、該副移動ガイド体12の磁気式センサ23に対向する対向面12A側からの着磁によるマーキング処理がなされている。すなわち、磁性部材12bには長手方向にN極とS極とを交互に例えば330μm周期(ピッチ)で分極して磁極が形成されている。これは前記実施例と同様ないわゆる「マグネスケール(着磁スケール)」である。なお、磁性部材12bはPPSとフェライト樹脂の混合により形成されているので保磁力が高く、安価である。
【0069】
また、磁気式センサ23は2つの磁気抵抗素子(MR素子)を備えており、例えば図9に破線で示すように、磁気式センサ23は、ガイド体対向部23aが副ガイド孔22から所定距離DDを隔てるように設けられている。そして、移動ブロック2が主移動ガイド体11と副移動ガイド体12に沿って移動するとき磁気式センサ23が磁性部材12bの磁極を感知して信号を出力する。なお、磁性部材12bの磁極は位相差をもつ2列から構成されており、この磁気式センサ23による検出原理は前記磁気式センサ7等による前記実施例と同様である。
【0070】
図9に示すように、主移動ガイド体11、主ガイド孔21及び副移動ガイド12の断面形状は真円であるが、副ガイド孔22の断面形状は、主ガイド孔21と副ガイド孔22の中心を結ぶ線L1の方向に僅かに縦長になった楕円形状である。なお、この実施例では、上記線L1の方向を「上下方向」、線L1と直角な線L2の方向を「左右方向」という。
【0071】
この第4実施例における寸法は以下のとおりである。主移動ガイド体11と副移動ガイド体12の直径は共に4.0mm、主ガイド孔21の直径は4.1mm、副ガイド孔22の左右方向の直径(短径)は4.1mm、副ガイド孔22の上下方向の直径(長径)は4.3mmである。
【0072】
すなわち、移動ブロック2を移動操作するときに加えられる加圧方向は図9の矢印Qの方向であり、副ガイド孔22と副移動ガイド体12との加圧方向Qのクリアランス(D1+D2)のほうが、主ガイド孔21と主移動ガイド体11との加圧方向Qのクリアランス(D3+D4)より大きくなっている。したがって、例えば加圧力が強い場合は主移動ガイド体11に撓みが生じる可能性もあるが、この撓みが生じても副ガイド孔22の上の縁22Aが磁性部材12bに接触することなく、この磁性部材12bの摩耗等を防止できる。
【0073】
また、磁気式センサ23のガイド体対向部23aも副ガイド孔22の上の縁22Aから距離DDだけ離れているので磁性部材12bに接触接触することがないが、この場合には、磁気式センサ23のガイド体対向部23aは磁性部材12bに近づき、磁気式センサ23による磁性部材12bの磁界の感知能力が上がるように作用する。したがって、主移動ガイド体11に撓みがない通常の状態において磁気式センサ23の感知能力を定格に設定しておけは、上記撓みが生じた場合、逆に磁気式センサ23の感度上昇につながり、検出精度に何ら影響がない。
【0074】
また、上記のクリアランスの関係は、逆に、主ガイド孔21と主移動ガイド体11との加圧方向Qのクリアランス(D3+D4)が、副ガイド孔22と副移動ガイド体12との加圧方向Qのクリアランス(D1+D2)より小さくしていることになり、この主ガイド孔21及び主移動ガイド体11により、移動ブロック2に対する加圧方向のガタを無くし、スライド操作の操作性を良くしている。さらに、副ガイド孔22と副移動ガイド体12との左右方向L2のクリアランス(D5+D6)は主ガイド孔21と主移動ガイド体11とのクリアランス(D3+D4)と同じ(同程度でよい)であり、図10に示したような移動ブロック2の左右方向の揺れ(矢印W)を防止できる。このように、互いに平行な主移動ガイド体11と副移動ガイド体12の2条からなる移動ガイド部を備えているので、移動ブロック2のスライド操作が安定し、操作時の加圧力による磁気式センサ23のセンサ検出精度への影響をさらに低減することができる。また、この第4実施例は磁気式センサ23のガイド体対向部23aが下向きとなっているので、このガイド体対向部23aへの埃等の影響も防止できる。
【0075】
なお、主移動ガイド体11が「主」であるゆえんは、スライド方向の方向性を確保していることにあり、副移動ガイド体12が「副」であるゆえんは、移動ブロック2の揺れを防止していることにある。そして、これらが2条であることから、例えば、2条間の上下相当の幅をもつガイドでガイドする場合よりも、移動ブロックとの接触面積が少なく、すなわち摩擦が少なく、スムーズなスライド操作が可能となっている。また、ガイド部材が軽くなり、装置全体の軽量化にもなる。
【0076】
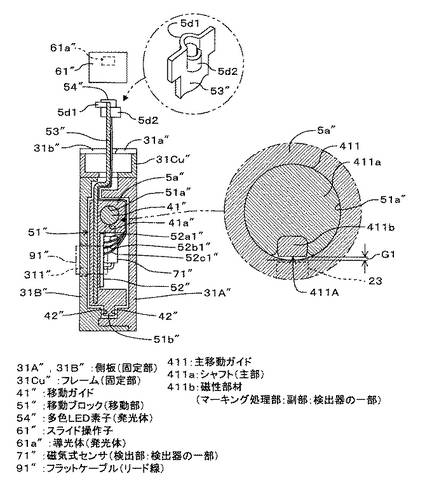
ここで、第4実施例では、副移動ガイド12を、主部であるステンレス製のシャフト12aと副部である磁性部材12bとで構成した例であるが、次の第5実施例のように、上側の主移動ガイド11を主部であるステンレス製のシャフトと磁性部材とで構成してもよい。この例として図6の二点鎖線の吹き出し部に断面を示した。すなわち、図6における移動ブロック51″のガイド保持部5a″に形成しされた軸孔(ガイド孔)51a″を貫通する主移動ガイド411を、ステンレス製のシャフト411aと磁性部材411bとで構成する。この構成は第4実施例におけるシャフト12aと磁性部材12bと同様である。そして、この磁性部材411bを下側にて配置し、この磁性部材411bの対向面411Aに磁気式センサ23(第4実施例と同様)を対向配置する。この場合、操作時に押圧力が加わるとギャップG1が広がるようになるが、主移動ガイド411と軸孔51a″とのクリアランスを正確に作り込んでおくことにより、ギャップG1の変化を小さくして検出精度に影響しないようにできる。また、この第5実施例において、図示は省略するが下側の副移動ガイドとこの副移動ガイドが貫通する副ガイド孔との関係を以下のようにすることができる。すなわち、副ガイド孔を縦長(図9における線L1方向を長手方向とする孔)とし、この副ガイド孔と副移動ガイドは前記図10に示した横揺れ防止の機能だけでよいので、ラフな設計とすることができる。
【0077】
なお、上記第4及び第5実施例においても、前記実施例と同様にスライド操作子にLED等による発光体を設けるようにしてもよい。そして、この第4実施例のスライドボリューム装置にあっても、図12あるいは図13の回路により、多色LED素子の発光色を制御し、各スライドボリューム装置に設定された機能の確認を容易にすることができることは第1実施例と同様である。すなわち、第4実施例の磁気式センサ23と磁性部材12b(副移動ガイド体12)及び磁気式センサ23の出力信号を処理する回路により構成されるスライドボリューム装置が図12、図13のボリューム回路V1に相当する。さらにこの第4実施例に用いるLED等による発光体が図12の多色LED素子54あるいは図13の赤色LED54a、緑色LED54b、青色LED54cに相当し、これらのLEDへの駆動電流は基板24に接続されたフラットケーブル25から供給される。さらにこの第4実施例におけるフラット検出25も、前記リード線取り出し口311と同様な取り出し口から引き出すように構成し、この取り出し口の部分で軽く固定することもでき、移動ブロック2が移動しても、側板の外側からみてフラットケーブル25が、通常のプリンタのヘッドに接続されたケーブルのようにはブラブラしないので、当該スライドボリューム装置の機器内での収まりが良くなる。
【0078】
上記の各実施例は磁気式により非接触式を実現した例であるが、光学式によって非接触式としてもよい。この場合、例えば図1の例では第2の移動ガイド42の下面(磁性面43a相当の面)、図3、図6の例では移動ガイド41′,41″の下面(磁性面41a′,41a″相当の面)に例えば白黒のバーコード状の一定周期のパターンを2列形成し、磁気式センサ71,71′,71″,23の変わりに発光ダイオードとフォトダイオード等で構成したフォトセンサを設け、上記白黒パターンによる2列に対応する前記位相差をもったパルス信号を検出信号として得るようにする。この光学式の場合も、多色LED素子54,54′,54″への通電とフォトセンサへの通電はフラットケーブル91,91′,91″により行う。また、この場合にも、加圧力が生じてもフォトセンサで第2の移動ガイド42、第1の移動ガイド41′,41″自体をセンシングするので、フォトセンサとパターン面とのクリアランス(ギャップ)を一定に保つことができるので、前記磁気式と同様に検出精度が確保される。
【0079】
また、磁気式、光学式の何れの場合も、操作時に当接部51eあるいはガイド保持部5a,5a″が、また、第4実施例では主ガイド孔21が加圧方向(矢印Q方向)のストッパとして働いて、第2の移動ガイド42に対する移動ブロック51の加圧方向の位置、移動ガイド41′,41″に対する移動ブロック51′,51″の加圧方向の位置がそれぞれ一定に規制されるので、操作感(摺動フィーリング)が向上するとともに、装置全体に対する垂直荷重の対策も施されたものとなる。
【0080】
なお、センサ(検出部)と共にセンシング手段を構成する移動ガイドの素材は、実施形態のものが好ましいが、本発明はこれに限定されるものではない。
【図面の簡単な説明】
【0081】
【図1】本発明の第1実施形態におけるスライドボリューム装置の移動ブロックの要部斜視図である。
【図2】同スライドボリューム装置の要部分解斜視図である。
【図3】本発明の第2実施形態におけるスライドボリューム装置の要部斜視図である。
【図4】実施例における磁気式センサと移動ガイドとのクリアランスを説明する図である。
【図5】実施例における移動ガイドの変形例を示す断面図である。
【図6】本発明の第3実施形態におけるスライドボリューム装置の要部断面図である。
【図7】本発明の第4実施形態におけるスライドボリューム装置の要部斜視図である。
【図8】第4実施形態における移動ブロックの要部斜視図及び副移動ガイド体の断面図である。
【図9】第4実施形態における移動ブロックの一部側面と主移動ガイド体及び副移動ガイド体の断面を示す図である。
【図10】第4実施形態における移動ブロックの横揺れ防止を説明する図である。
【図11】本発明の実施形態におけるミキシングコンソールのパネル面の全体図である。
【図12】実施形態におけるスライドボリューム装置を用いたパラメータ設定装置の回路図である。
【図13】同スライドボリューム装置を用いたパラメータ設定装置の他の回路図である。
【符号の説明】
【0082】
2…移動ブロック(移動部)、11…主移動ガイド体(移動ガイド部)、12…副移動ガイド体(移動ガイド部)、12a…シャフト(主部)、12b…磁性部材(マーキング処理、副部、検出器の一部)、12A…対向面、21…主ガイド孔、22…副ガイド孔、23…磁気式センサ(検出部、検出器の一部)、23a…ガイド体対向部、31A′…側板、31U′…上フレーム、31,31′…フレーム(固定部、本体部)、311…リード線取り出し口、41、41′…第1の移動ガイド、41″…移動ガイド、42、42′…第2の移動ガイド、421a、41a′、41a″…磁極面(マーキング処理部、検出器の一部)、51、51′、51″…移動ブロック(移動部)、51e…当接部、54、54′、54″…多色LED素子(発光体)、61、61′…スライド操作子、61a、61a′…導光体(発光体)、71、71′、71″、23…磁気式センサ(検出部、検出器の一部)、91、91′、91″…フラットケーブル(リード線)、411…主移動ガイド体、411a…シャフト(主部)、411b…磁性部材(マーキング処理、副部、検出器の一部)
【技術分野】
【0001】
本発明は、スライド操作子等の操作で移動部を摺動移動してパラメータ等を設定するのに適したスライド操作装置に関する。
【背景技術】
【0002】
従来、ミキシングコンソールは放送局、レコーディングスタジオ、コンサート会場等で使用され、各種の楽器やボーカル等の音声信号をプレイヤー用のモニタやミキサ用のモニタ等として出力するために、多くの信号に対して各種の制御(信号処理)を行う必要がある。このため、操作パネルには各種の多数の操作子が配設されているが、操作パネルの操作性を向上させて、操作者の負担を軽減することが要求される。
【0003】
例えば、特開平9−198953号公報には複数のフェーダ摘みに対して、赤、緑、黄色などの如く色を異ならせ、色を識別することでフェーダ摘みの位置などがわかるようにした技術が開示されている。このように、色により視覚的に操作子を識別できると多数の操作子を操作する場合に操作者の負担を軽減することができる。
【特許文献1】特開平9−198953号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
上記フェーダ摘みのようなスライド操作子を操作するようなスライドボリューム装置では、操作子を操作するときに操作子にある程度の加圧力が加えられる。特に、素早く操作するときに強い加圧力が加えられることがある。
【0005】
しかし、スライドボリューム装置は、スライド操作子に連動する内部の移動部の移動位置をセンサ等で検出するため、このスライド操作子に加えられる加圧力がセンサの検出精度に影響を与える可能性がある。さらに、加圧力が強すぎるとスライドボリューム装置自体の破壊を招きかねない。またさらに、加圧力が強すぎるとセンシング作用がうまく働かず、センシング精度が落ちることもある。
【0006】
本発明は、スライド操作子等の操作で該操作状態に対応する移動信号を得るスライド操作装置において、操作時の加圧力のセンサ検出精度への影響を低減するとともに、装置全体に対する垂直荷重の対策を施すことを課題とする。
【課題を解決するための手段】
【0007】
請求項1のスライド操作装置は、移動部が固定部に設けた移動ガイドによってガイドされて移動するとき、センシング手段は操作状態をセンシングする。センシング手段は移動ガイドそのものと、移動部に設けられ該移動ガイドをセンシングして移動信号を出力する検出部とからなる。そして、検出部を、前記移動部を移動させるときに加圧する方向と反対方向に対峙して設けるようにした。これにより、移動部が加圧され、移動ガイドが仮に撓んでも、該移動ガイドと検出部との距離が保持されるので、センサ当の検出部の検出精度が確保される。また、操作感(摺動フィーリング)が向上するとともに、装置全体に対する垂直荷重への対策となる。なお、「移動信号」とは、周波数が移動部の移動速度に比例するパルス信号(実施形態の例)、移動部の移動量を示す信号(データ)、移動した位置を示す信号(データ)、移動時の速度を示す信号(データ)、移動時の加速度を示す信号(データ)等の何れの信号でもよく、移動部の移動状態に応じた各種の信号である。また、移動信号が上記パルス信号であって、このパルス信号から移動部の移動量、移動した位置、移動時の速度、移動時の加速度を求めるようにしてもよい。
【0008】
請求項2のスライド操作装置は、移動部が固定部に設けた移動ガイドによってガイドされて移動するとき、この移動部に設けた検出部が移動ガイドをセンシングして移動信号を出力する。移動部は、該移動部を移動させるときに加圧する方向に前記移動ガイドに当接する当接部を有する構造で、検出部は、上記加圧する方向に対向するように、移動ガイドを介した前記移動部の部位に設けるようにした。これにより、移動部が加圧されても、当接部が移動ガイドに当接して検出部と移動ガイドとの距離が保持され、検出部の検出精度が確保される。また、操作感(摺動フィーリング)が向上するとともに、装置全体に対する垂直荷重への対策となる。なお、当接部は移動体の移動方向に離間して2つ設けるのが好ましいが、1つでもよい。また、移動ガイドは2条で構成されていてもよい。
【0009】
請求項3のスライド操作装置は、請求項1または2記載のスライド操作装置において、前記移動ガイドに、多数分極した磁極を該移動ガイドの長手方向に形成したマーキング処理部を有し、このマーキング処理部の磁極の磁界を磁気式センサで検出するようにした。
【0010】
請求項4のスライド操作装置は、請求項1または2記載のスライド操作装置において、前記移動ガイドに、濃淡のパターンを該移動ガイドの長手方向に形成したマーキング処理部を有し、このマーキング処理部のパターンを光学式センサで検出するようにした。
【0011】
請求項5のスライド操作装置は、請求項1、2、3または4記載のスライド操作装置において、移動部に取り付けられたスライド操作子に発光体を設けるようにした。
【0012】
請求項6のスライド操作装置は、請求項1、2、3、4または5記載のスライド操作装置において、検出部に接続されるリード線(例えばフラットケーブル)を取り出すリード線取り出し口を移動部の移動方向の中央に設け、このリード線取り出し口から移動部までに位置する内部リード線の長さを最小限にするようにした。これにより、移動部の移動によって内部リード線が撓むような場合でも、この撓んだ内部リード線の部分をリード線取り出し口から外部に引き出す必要がなく該リード線をリード線取り出し口から外の部分で固定(あるいは仮固定)することもできるので、当該スライド操作装置の外側でリード線を撓ませるようなこともない。発明の詳細な説明のここまでは、「検出器」を「検出部」と変更した以外は先の出願(特願2004−199128)の記載のままであり、この先の出願において操作時の加圧力のセンサ検出精度への影響を低減でき、装置全体に対する垂直荷重の対策が施されているが、発明者はさらに作用効果を奏するものとして以下の発明をなした。また、「センシング手段」や「検出器」は「マーキング処理部」と「検出部」とを有するものであることを明確にしている。
【0013】
請求項7のスライド操作装置は、互いに平行な第1及び第2の移動ガイド体の2条からなる移動ガイド部を設け、いずれか一方の移動ガイド体(実施形態における副移動ガイド体)に、検出器の一部としてその長手方向にマーキング処理が施されたマーキング処理部を形成し、移動部が前記移動ガイド部によってガイドされその長手方向に移動することで前記マーキング処理部に対して対向移動されることによって前記移動信号を発生する検出部を前記移動部に設け、移動部を移動ガイド部によってその長手方向にガイドし、この移動部が移動するときマーキング処理から移動信号を発生する検出部を移動部に設け、前記いずれか一方の移動ガイド体は前記検出部の移動ガイド体対向部に対する対向面にその長手方向に沿って前記マーキング処理を施すようにした。各請求項において「いずれか一方の移動ガイド体」はマーキング処理部を有する方の移動ガイド体である。
【0014】
請求項8のスライド操作装置は、請求項7に記載のスライド操作装置であって、前記検出部の一部としての検出部を、前記移動部を移動させるときに加圧する方向に向けて、前記いずれか一方の移動ガイド体を介した前記移動部の部位に設けるようにした。
【0015】
請求項9のスライド操作装置は、請求項7または8に記載のスライド操作装置であって、移動部を、前記いずれか一方の移動ガイド体を貫通する第1のガイド孔(副ガイド孔)と前記他方の移動ガイド体を貫通する第2のガイド孔(主ガイド孔)とを有し、前記第1のガイド孔のほうが前記第2のガイド孔よりも、前記移動部を移動させるときに加圧する加圧方向に大きなクリアランスを有する構成とした。
【0016】
請求項10のスライド操作装置は、請求項9に記載のスライド操作装置であって、前記第2のガイド孔における前記加圧方向のクリアランスを、前記第1のガイド孔における前記加圧方向のクリアランスより小さくするようにした。
【0017】
請求項11のスライド操作装置は、請求項7乃至10のいずれか一項に記載のスライド操作装置であって、前記いずれか一方の移動ガイド体は、棒状の剛性を有する非磁性体(ステンレス棒等の金属棒、セラミック棒、カーボン棒等からなる非磁性体)を主軸とする主部と、該主部の長手方向に沿って設けた着磁スケールを施したマーキング処理部としての副部とからなる構成とした。
【0018】
好適なスライド操作装置として、請求項11において、前記マーキング処理部は、前記主部の最外殻部内に施され、着磁フェライト材と該フェライト素材粉末体を結合する結合体材とからなる合成体からなる着磁性体で構成するとよい。
【発明の効果】
【0019】
請求項1または2によれば、検出器の良好な検出精度が得られるとともに、操作感(摺動フィーリング)が向上し、さらに、スライド操作装置全体に対する垂直荷重への対策ともなる。
【0020】
請求項3によれば、請求項1または2の効果に加えて、磁気式で検出を行っているので、磁気式センサのセンシング面や磁極を形成した部分が汚れたり、センシング面と磁極を形成した部分とのギャップに埃が入ったりしても検出精度が低下することがなく、汚れや埃に強いスライド操作装置が得られる。
【0021】
請求項4によれば、光学式センサにおいて請求項1または2の効果が得られる。
【0022】
請求項5によれば、請求項1、2、3または4の効果に加えて、スライド操作子に設けた発光体の発光により該スライド操作装置に対して割り当てられた機能等を色的に識別し得るので、直感的に素早い操作ができるなど操作性を高めることができる。
【0023】
請求項6によれば、請求項1、2、3、4または5の効果に加えて、リード線(フラットケーブル等)がリード線取り出し口の外でブラブラしないので、当該スライド操作装置の、該スライド操作装置を搭載する本体機器内での収まりが良くなる。
【0024】
請求項7によれば、互いに平行な第1及び第2の移動ガイド体の2条からなる移動ガイド部を備えているので、移動部のスライド操作が安定し、操作時の検出器のセンサ検出精度への影響を低減することができる。
【0025】
請求項8によれば、移動部をマーキング処理部に対して、移動させるときに加圧する方向に向けて設けてあるので、強い加圧力で移動ガイド体に撓みが生じても、検出部のガイド体対向部がマーキング処理部に近づいて検出器の検出感度が上がるように作用するので、上記加圧力による撓み等が検出精度に何ら影響しない。
【0026】
請求項9によれば、請求項7または8の効果に加えて、移動部と移動ガイド部とのクリアランスとして、第1のガイド孔(副ガイド孔)のほうが第2のガイド孔(主ガイド孔)よりも加圧方向に大きなクリアランスを有するので、強い加圧力で移動ガイド体に撓みが生じても副ガイド孔がマーキング処理部に接触することなく、マーキング処理部の摩耗等を防止でき、かつ、検出部のガイド体対向部がマーキング処理部に近づいて検出器の検出感度が上がるように作用するので、上記加圧力による撓み等が検出精度に何ら影響しない。
【0027】
請求項10によれば、請求項9の効果に加えて、第2のガイド孔とこれに対応する移動ガイド体により、移動部に対する加圧方向のガタが無くなり、スライド操作の操作性が良くなるとともに、第1のガイド孔とこれに対応する移動ガイド体(いずれか一方の移動ガイド体)との左右方向のクリアランスを小さくして、移動部の左右方向の揺れを防止できる。
【0028】
請求項11によれば、請求項7乃至10のいずれか一項の効果に加えて、前記いずれか一方の移動ガイド体は、主部が棒状の剛性を有するので、例えばフェライト等の脆さを補いながら、副部によりマーキング処理部の着磁スケールの磁気の強度を確保できるので、堅牢で安定した検出精度を有するスライド操作装置を得ることができる。
【発明を実施するための最良の形態】
【0029】
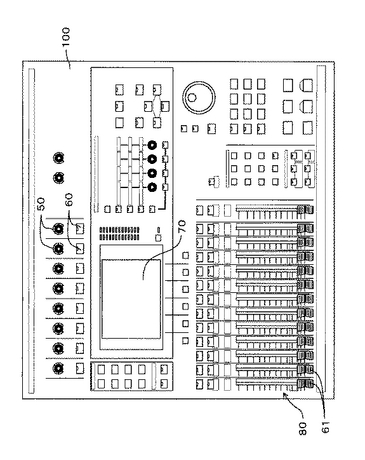
以下、図面を参照して本発明の実施形態について説明する。図11は実施形態のスライド操作装置(後述の第1〜第5実施例のスライドボリューム装置)を用いたミキシングコンソールのパネル面100の全体図である。なお、このパネル面100の説明ではパネル面100を正面から見た状態での上下左右で方向を示す。パネル面100には、マイク入力やライン入力等のモノラル入力チャンネルの入力レベルを調整するボリューム操作子50、チャンネルオンスイッチの操作ボタン60、入力チャンネルの設置内容等を表示する液晶ディスプレイ70、実施形態の複数のスライド操作装置の各々に対応する複数のスライド操作子61からなるスライド操作子群80等が設けられている。
【0030】
このスライド操作子群80は、例えば、入力信号や出力信号の周波数特性を設定するためにグラフィックイコライザのような操作をしてフィルタ特性に対応する各パラメータを設定したり、入力レベルや出力レベルを調整するフェーダとしてパラメータを設定するなど、各種のパラメータの設定に利用する。すなわち、スライド操作子群80の機能を、複数機能の中から選択して切り換えることで多くのパラメータを設定することができる。
【0031】
図2はスライド操作装置としての第1実施例のスライドボリューム装置の要部分解斜視図である。このスライドボリューム装置は、前記パネル面100に対してその裏側で直角面を成す側板31A,31Bと、2つの断面コ字状のフレーム31Cu,31Cdとにより「固定部」としてのフレーム31が形成されている。フレーム31Cdは側板31A,31Bの上端及び両端を上から囲うように取り付けられ、フレーム31Cuはこのフレーム31Cdの上に取り付けられる。そして、上側のフレーム31Cuの一端にはモータ32が取り付けられるつともに、この上側のフレーム31Cuの両側の止め金具31a,31bによりフレーム31全体が前面パネル100の裏面に取り付けられる。また、下側のフレーム31Cdの両端の端面31c,31d間には、側板31Aの長手方向に沿って互いに平行な第1の移動ガイド41と第2の移動ガイド42とが掛け渡されて取り付けられている。第1の移動ガイド41は丸棒状の金属部材、第2の移動ガイド42は角棒状の金属部材であり、この第1及び第2の移動ガイド41,42には、「移動部」としての移動ブロック51が該移動ガイド41,42の長手方向に摺動自在となるように取り付けられている。この第1実施例では、「第1及び第2の移動ガイドの両方」または「第2の移動ガイド」が請求項の「移動ガイド」に相当する。
【0032】
フレーム31Cuの片側に配設されたモータ32の駆動軸には駆動プーリ32aが取り付けられ、さらにフレーム31Cuの他端には従動プーリ32bが配設されている。駆動プーリ32aと従動プーリ32bにはタイミングベルト32cが巻回されており、このタイミングベルト32cの一箇所に移動ブロック51の上部が取り付けられている。これにより、モータ32の正逆回転により移動ブロック51は第1及び第2の移動ガイド41,42に沿って往復移動する。これは、例えば該スライドボリューム装置(フェーダ)に別のチャンネルをアサインしたり別の機能にアサインしたときにそのパラメータに対応するように、スライド操作子61の位置を自動設定するときの動作である。
【0033】
図1は移動ブロック51の要部斜視図であり、図2におけるP矢印の方から見た状態を示している。移動ブロック51には、第1の移動ガイド41が嵌挿される軸孔51aと、第2の移動ガイド42が嵌挿される軸孔51b,51bが形成され、さらに第2の移動ガイド42から離間するように軸孔51b,51bよりも窪んだ面として基板収容部51cが形成されている。基板収容部51cは後述のセンサが固着される基板52が固定されるもので、この基板52にはフラットケーブル91の一端が接続されるとともに、導線52a1,52b1,52c1が接続されている。この導線52a1,52b1,52c1は透孔51dを通ってレバー53に取り付けられた多色LED素子54に接続されている。そして、図2に示したように、レバー53には多色LED素子54の上部発光面に対向する導光体61aを有するスライド操作子61が取り付けられている。なお、多色LED素子54と導光体61aが「発光体」に相当する。
【0034】
図1の二点鎖線の吹き出し部に図示したように、第2の移動ガイド42の下面には長手方向の略全長に亘って溝42aが形成されており、この溝42a内にラバー製の磁性部材421が填め込まれている。この磁性部材421は長手方向にN極とS極とを交互に細かく(例えば400μm周期で)分極して磁極を形成したもの(いわゆる「マグネスケール」)である。あるいは、溝を設けない第2の移動ガイド42そのものが金属酸化物からなるフェライト磁石を形成していてもよい。これらの磁極を形成したパターンが「マーキング処理部」に相当する。また、基板52上にはホール素子を含むIC等で形成した「検出器」としての磁気式センサ71(または、MRセンサ)が搭載されており、この磁気式センサ71のセンシング面は磁性部材421の磁極面421aに対して僅かなギャップ(間隔)を設けて対面している。さらに、この磁気式センサ71の出力線と、前記多色LED素子54の導線52a1,52b1,52c1は、基板52に取り付けられたフラットケーブル91を介して外部に接続されている。そして、このフラットケーブル91から供給される電流により多色LED54は発光する。また、フラットケーブル91を介して磁気式センサ71へ通電されるとともに、この磁気式センサ71の検出信号(「移動信号」)はフラットケーブル91を介して図示しない回路に送られる。
【0035】
すなわち、移動ブロック51の移動に伴って、磁気式センサ71が磁性部材421の磁極面421aに対して移動すると、この磁気式センサ71は磁極面421aのN極とS極の極性の反転に対応するパルス信号を出力する。そして、このパルス信号の数により、移動ブロック51の移動量(長さ)を検出することができる。また、磁極面421aの磁極は例えば2列からなり、この磁極のパターンは第2の移動ガイド42の長手方向にその位相が1/2π相当ずれており、磁気式センサ71は位相のずれたパルス信号を出力するので、この位相のずれの正逆の方向により、移動ブロック51の移動方向が判明する。あるいは、磁極パターンは位相ずれのないNSNS…のパターンからなるもので、センサの検出極部を1/2π相当ずらして配置するようにしてもよい。さらに、移動ブロック51の移動前の位置の位置情報は図示しない制御回路等により常に記憶されているので、この位置情報と上記移動量及び移動方向とにより、スライドボリューム装置全体での移動ブロック51の位置すなわちスライド操作子61の位置が検出される。
【0036】
ここで、スライド操作子61を手動操作して移動ブロック51を移動(摺動)させる時、一般に図1の矢印Qで示す方向に移動ブロック51は加圧される。これに対して、移動ブロック51の軸孔51b,51bの上部は、この加圧する方向に前記第2の移動ガイド42の上端面(磁性部材421と反対側の面)に当接する当接部51eとなっている。少しの力で加圧しても、第1及び第2の移動ガイド41,42によって、移動ブロック51は下がらないようになっているが、強い力で加圧して移動ブロック51が下がるようになったとしても、当接部51eにより第2移動ガイド42も共に下がるので、第2の移動ガイド42の磁性部材421の磁極面421aと磁気式センサ71のセンシング面とのギャップ(間隙)が一定に保たれる。これにより、磁気式センサ71の検出信号として安定した信号を得ることができ、検出精度が確保される。なお、上記ギャップが変動すると検出信号のレベル等が変化して検出精度が低下するが、上記実施例によりこのようなことがない。
【0037】
このように、磁気式センサ(検出器)71が、この磁気式センサ71を設けた移動ブロック(移動部)51を保持する移動ガイド42をセンシングするようになっているので、例えばフレーム31の側板31A(または31B)等に設けたマーキング処理部等を検出するような場合よりも格段に検出精度が向上する。すなわち、このように側板31A(または31B)等に設けたマーキング処理部を検出するような場合には、加圧力により移動ブロック51が下がると、そのまま検出精度に影響するが、上記実施形態ではこのようなことがない。
【0038】
また、上記実施例のように磁気式で検出を行っているので、磁気式センサ71のセンシング面や磁性部材421の磁性面421aが汚れたり、ギャップに埃が入ったりしても検出精度が低下することがなく、汚れや埃に強いスライドボリューム装置が得られる。
【0039】
また、図2に示したように、側板31Bには、移動ブロック51の移動方向の中央(側板31Bの長手方向の中央)に縦長のリード線取り出し口311が形成されている。そして、前記磁気式センサ71及び多色LED素子54に接続されるフラットケーブル91(リード線)は、基板52から引き出して180°折返し、さらにリード線取り出し口311から側板31Bの外部に引き出されている。すなわち、リード線取り出し口311が中央にあるので、フラットケーブル91のリード線取り出し口311から内部にある部分の長さは移動ブロック51の全摺動範囲の略半分で良く、さらにそれを折返して配設しているので、フラットケーブル91をケース31内に容易に収容できる。したがって、フラットケーブル91はリード線取り出し口311の部分で軽く固定することもでき、移動ブロック51が移動しても、側板31Bの外側からみてフラットケーブル91が、通常のプリンタのヘッドに接続されたケーブルのようにはブラブラしないので、当該スライドボリューム装置の機器内での収まりが良くなる。
【0040】
図12は上記スライドボリューム装置を用いたパラメータ設定装置の回路図である。この回路はスライドボリューム装置を複数(この例では3つ)の異なる機能に切り換え設定する回路であり、図示しない機能選択スイッチに連動するスイッチ回路c1,c2,c3、セレクタ回路d1,d2を備えている。なお図12は一つのスライドボリューム装置に対応する回路として示してあるが、前記スライド操作子群80の複数の操作子61に対応する複数のスライドボリューム装置についても同様の回路である。そして、機能選択スイッチで選択された同じ機能が他のスライドボリューム装置にも設定されるが、以下、一つのスライドボリューム装置について説明する。
【0041】
スイッチ回路c1,c2,c3の一端は接地(アース)されており、他端はセレクタ回路d1の選択端子d11,d12,d13にそれぞれ接続されている。また、セレクタ回路d1,d2の共通接点の間にボリューム回路V1が接続されている。このボリューム回路V1は前記スライドボリューム装置における検出信号に応じて抵抗が設定される電子ボリュームである。セレクタ回路d2の選択端子d21,d22,d23は基準電圧と利用回路200に並列に接続されている。なお、この利用回路200に並列に接続される信号線d3,d4,d5は、それぞれ電圧信号を該利用回路200において機能(1),(2),(3)に応じてそれぞれ所要の箇所にパラメータとして供給するものである。また、前記多色LED素子54の赤色LED54a,緑色LED54bの一端は基準電圧に接続され、それぞれ他端は、抵抗r1,r2、スイッチ回路c1,c2を介してそれぞれ接地されるとともに抵抗r3,r4、スイッチ回路c3を介して共通に接地される。
【0042】
機能(1)を選択すると、スイッチ回路c1がオン(閉成)されるとともに、セレクタd1の選択端子d11とセレクタd2の選択端子d21がそれぞれボリューム回路V1に接続される。機能(2)を選択すると、スイッチ回路c2がオン(閉成)されるとともに、セレクタd1の選択端子d12とセレクタd2の選択端子d22がそれぞれボリューム回路V1に接続される。さらに、機能(3)を選択すると、スイッチ回路c3がオン(閉成)されるとともに、セレクタd1の選択端子d13とセレクタd2の選択端子d23がそれぞれボリューム回路V1に接続される。したがって、スライドボリューム装置の操作により、ボリューム回路V1の抵抗値に応じた電圧信号が発生するが、この電圧信号は、機能(1)のとき信号線d3から、機能(2)のとき信号線d4から、機能(3)のとき信号線d5からそれぞれ利用回路200に供給される。
【0043】
また、機能(1)のとき赤色LED54aのみが点灯し、機能(2)のとき緑色LED54bのみが点灯する。また、機能(3)のときとき赤色LED54aと緑色LED54bの両方が点灯する。これにより、スライド操作子61の導光体61aは機能(1)のとき「赤色」、機能(2)のとき「緑色」、機能(3)のとき「黄色(赤+緑)」に発光し、この導光体61aの発光色により、現在どの機能が選択されているかを容易に確認することができる。
【0044】
以上の実施例では多色LED素子54が赤色LED54a,緑色LED54bの2つのLEDの場合について説明したが、赤色LED54a、緑色LED54b、青色LED54cの3色を備えた多色LED素子を用いてもよい。この場合、各LEDの輝度を制御することで多くの色で発色させることができ、多数の機能を選択する場合に適している。図13は多数の機能を選択する場合のパラメータ設定装置の回路図である。機能を選択する図示しない複数の操作子に対応するスイッチ回路s1、s2、…、snが基準電圧Vに並列に接続され、これらのスイッチ回路s1、s2、…、snのオン信号はHレベル信号、オフ信号はLレベル信号となり、これらのオン/オフ信号は複数ビットのビット信号としてセレクタb1とテーブルb2に入力される。なお、スイッチ回路s1、s2、…、snは対応する操作子により択一的にオンとなり、このビット信号は1つのビットがHレベルで、他のビットはLレベルとなる。
【0045】
また、前記スライドボリューム装置によって駆動されるボリューム回路V1が基準電圧Vに接続され、ボリューム回路V1の抵抗値に応じた電圧信号がセレクタb1に入力される。セレクタb1の出力e1、e2、…、enはスイッチ回路s1、s2、…、snに各々対応しており、このセレクタb1は、スイッチ回路s1、s2、…、snからのビット信号により出力e1、e2、…、enを択一的に選択し、各機能に応じたボリューム回路V1の電圧信号を利用回路200に供給する。
【0046】
一方、テーブルb2は、スイッチ回路s1、s2、…、snから入力されるビット信号を例えば3ビットからなる3つのビット信号に変換する回路であり、この出力される3つのビット信号はスイッチ回路s1、s2、…、snで選択された機能に割り当てた色に対応するビット信号となる。そしてこの3ビットの3つのビット信号は赤色LED54a、緑色LED54b、青色LED54cへの供給電流を制御する電子ボリューム回路va,vb,vcにそれぞれ供給される。これにより、赤色LED54a、緑色LED54b、青色LED54cは各対応するビット信号が示す輝度で発光する。なお、この例では、各ビット信号は3ビットで“0〜7”の輝度に対応する数値データであり、赤色LED54a、緑色LED54b、青色LED54cの3色の輝度の組み合わせにより、非点灯(黒)を含めて512色で発光させることができる。
【0047】
図3はスライド操作装置としての第2実施例のスライドボリューム装置の要部斜視図であり、第1実施例の図2におけるP矢印の方から見た状態に対応している。なお、第1実施例の要素と対応する要素には第1実施例と同数字符号に「′」を付記する。この第2実施例では、第1,第2の移動ガイド41′,42′を両方とも丸棒状の金属部材とし、この第1,第2の移動ガイド41′,42′に「移動部」としての移動ブロック51′が移動ガイド41′,42′の長手方向に摺動自在となるように取り付けられている。この第2実施例も前記側板31A,31B、フレーム31Cu,31Cdで構成されるフレーム31が「固定部」である。
【0048】
この第2実施例における移動ブロック51′は、上辺のガイド保持部5aの中央に矩形の空間(孔)Sが形成されている。なお、この空間Sは当該移動ブロック51′の形成を容易にしているが、なくてもよい。図3の二点鎖線の吹き出し部に一部図示したように、ガイド保持部5aの両端には該空間Sに貫通する保持孔5a1がそれぞれ形成され、この保持孔に保持輪51a′,51a′が取り付けられている。ガイド保持部5aの下面側部から下方には基板保持部51c′を有し、この基板保持部51c′の下部片側のガイド保持部5bには保持孔が形成されるとともにこの保持孔に保持輪51b′が取り付けられている。そして、第1の移動ガイド41′が、保持輪51a′,51a′と空間Sを介してガイド保持部5aを貫通するように嵌挿されてる。また第2の移動ガイド42′が保持輪51b′を介してガイド保持部5bを貫通するように嵌挿されてる。各保持輪51a′,51a′,51b′の内面は滑らかに仕上げられており、移動ブロック51′が移動ガイド41′,42′に沿って移動するとき滑らかに移動する。
【0049】
基板保持部51c′には基板52′が取り付けられ、この基板52′には「検出器」としての磁気式センサ71′が取り付けられている。また、基板52′には、端子部91a′を介してフラットケーブル91′の一端が接続されるとともに、導線52a1′,52b1′,52c1′が接続されている。レバー53′の上端にはLED保持部5d1,5d2が形成されており、このLED保持部5d1,5d2には多色LED素子54′が取り付けられている。なお、LED保持部5d1,5d2は図6(第3実施例)の二点鎖線の吹き出し部に図示したように、上下段違いの半円弧状の形状で構成されている。導線52a1′,52b1′,52c1′はガイド保持部5aのフレーム31A用の対向部に設けた凹部5a2,5a3にゴム接着剤(引っぱれば引き剥がすことができる)にて接着係止され、LED保持部5d2まで導かれて、多色LED素子54′に接続されている。そして、レバー53′には多色LED素子54′の上部発光面に対向する導光体61a′を有するスライド操作子61′が取り付けられている。なお、多色LED素子54′と導光体61a′が「発光体」に相当する。
【0050】
また、磁気式センサ71′の出力線と、多色LED素子54′の導線52a1′,52b1′,52c1′は、基板52′に取り付けられたフラットケーブル91′を介して外部に接続されている。このフラットケーブル91′も第1実施例と同様にリード線取り出し口311から外部に引き出され、第1実施例と同様な効果が得られる。また、多色LED54′と磁気式センサ71′への通電、磁気式センサ71′からの検出信号の取り出しがフラットケーブル91′を介して行われることは第1実施例と同様である。なお、後述のように第1の移動ガイド41′にはマーキング処理部として磁極が形成されており、磁気式センサ71′の検出信号により移動ブロック51′(スライド操作子61′)の位置が検出される。
【0051】
第1の移動ガイド41′は、鉄を母材にし、ニッケル、コバルトを混合した合金で製造したものである。これにより、第1の移動ガイド41′は、鉄そのものの性質をそのまま残すことができ、折れにくく、わずかに曲がっても元に戻るようなバネ性を有する。すなわち、折れやすいフェライト磁石そのものをガイドとするよりも、移動ガイド41′は加圧力が加わっても折れにくく、装置の破壊を防止することができる。
【0052】
さらに、図4に示したように、第1の移動ガイド41′は、第1実施例と同様にマーキング処理部としてN極とS極とを交互に細かく磁極を多数形成した磁石となっている。例えば、磁極はN極とN極の間が100μmピッチ(N極とS極間は50μm)の高分解能磁石となっている。また、磁気式センサ71′は、ホール素子を含むIC等で形成したもの(または、MRセンサ)であり、この磁気式センサ71′のセンシング面71a′は第1の移動ガイド41′の磁極面41a′に対して例えば0.1〜0.2mm程度の僅かなクリアランスCR(間隔)を設けて対面している。そして、この磁極面41a′の磁界が磁気式センサ71′で検出され、検出信号(移動信号)が得られる。すなわち、第1の移動ガイド41′と磁気式センサ71′はセンシング手段を構成している。
【0053】
ここで、磁気式センサ71′が、この磁気式センサ71′を設けた移動ブロック51′を保持する移動ガイド41′自体をセンシングするようになっている。したがって、第1実施例と同様に、仮に、加圧力により移動ガイド41′が僅かに撓んで移動ブロック51′が下がっても、上記クリアランスCRは常に一定になるので、加圧力による検出精度への影響を無くすことができる。
【0054】
さらに、図4に点線で示したように、移動ガイド41′の磁極は、移動ガイド41′の内部よりも磁極面41a′の方が強い磁化を呈して形成されているが、この磁化の強さは小さくてよい。すなわち、クリアランスCRが一定なので、このクリアランスCRそのものを小さくすることができる。したがって、磁気式センサ71′の感度を仮にクリアランスを大とした場合と同じ感度に設定したとすると、このクリアランス大とした場合よりも着磁そのものが弱くてもよい。すなわち、磁極面41a′の磁化の強さは小さくてよい。この磁化の強さは、通常の加圧力あるいは通常の操作時に、磁気式センサ71′と磁極面41a′によるセンシングの不感帯や不動作域がないような最小の磁力に着磁するのみでよく、しかも強い加圧力が加えられたときでも安定したセンシングが得られる。このように、クリアランスCRを小にして、感度向上及び検出精度向上を実現している。なお、第2の移動ガイド42′と移動ブロック51′とのクリアランスは大きくても感度や精度に影響しないので、ある程度ラフに設計してもよく、コストを低減することもできる。
【0055】
図5は移動ガイドの変形例を示す断面図である。以上の第2実施例の移動ガイド41′は(I)に示した丸棒状である。(II)は断面が横に平たい長円状の棒状の形状、(III )は断面が正方形の角棒状の形状、(IV)は断面が縦の長方形となる長尺板状の形状、(V)は断面が横の長方形となる長尺板状の形状をそれぞれ示している。移動ブロックにはこれらの移動ガイドの断面形状に整合する保持孔を設けるが、特に(IV),(V)の場合は移動ガイドは一つでよい。すなわち、第2の移動ガイド42′は移動ブロック51′が第1の移動ガイド41′を軸にして横方向に回動するのを防ぐような補助的な役割をしている。しかし上記の(IV),(V)の場合、その一つの移動ガイドだけで移動ブロックの回動を抑えることができ、第2の移動ガイド42′等を必要としない。
【0056】
また、第1の移動ガイド41′は、鉄を母材にし、ニッケル、コバルトを混合した合金で製造したので折れにくい移動ガイドともなっているが、軟鉄を上にしてその下にファライト磁石を貼り合わせて形成するようにしてもよい。このようにすると、図5に示した(II)〜(V)のいずれでも簡単に作ることができる。例えば、磁化方法も磁気式センサに向き合う面のみに磁化を施すだけでよいので、貼り合わせによって、下のファライト磁石が磁力低下となることはない。例えば、移動ガイド41′は、下の3%くらいしか磁化させず、上面の方は殆ど磁力はない。また、第1の移動ガイド41′は後述の実施例のよに剛性の高いステンレスシャフトと磁性部材でインサート成型して、移動ガイド41′を堅牢にしてもよい。これにより、フェライト等の脆さを補うことができ、かつ磁性の強度を確保することができる。
【0057】
なお、上記第2実施例において、移動ブロック51′の下側のガイド保持部5b及び保持輪51b′が第2の移動ガイド42′の全周に嵌合する構造になっているが、この移動ガイド42′に対して、ガイド保持部5b(及び保持輪51b′)の左右両側の何れか一方が開放されていても、側板があるので移動ガイド42′がガイド保持部5bから外れることがない。また、ガイド保持部5b(及び保持輪51b′)の下部が開放されていてもよい。このようにすると、組み立てが容易になる。さらに、下側のガイド保持部5bには保持輪51b′はなくてもよい。
【0058】
図6はスライド操作装置としての第3実施例のスライドボリューム装置の要部断面図であり、図2のA矢視断面に相当する。なお、第1及び第2実施例の要素と対応する要素には第1及び第2実施例と同数字符号に「″」を付記する。また、図6には後述の実施例に係る断面図も二点鎖線の吹き出し部に図示されている。この第3実施例では、移動ガイド41″は第2実施例の第1の移動ガイド41′と同様に、鉄を母材にし、ニッケル、コバルトを混合した合金で製造し、着磁して磁極面41a″を形成したものである。移動ガイド41″は、移動ブロック51″のガイド保持部5a″に形成しされた軸孔51a″を貫通し、この移動ブロック51″は図6に直交する方向に摺動自在に保持されている。また、移動ブロック51″の下部には凸条51b″が形成され、側板31A″,31B″の下部にはこの凸条51b″にそれぞれ対向する側壁42″,42″がそれぞれ形成されている。そして、この側壁42″,42″は移動ブロック51″の凸条51b″を図6に直交する方向にガイドし、第2実施例の第2の移動ガイド42′と同様の役割をする。
【0059】
移動ブロック51″には基板52″が取り付けられ、この基板52″に磁気式センサ71″が取り付けられている。基板52″に接続された導線52a1″,52b1″,52c1″は、レバー53″に沿って配線され、レバー53″の上端のLED保持部5d1,5d2に取り付けられた多色LED素子54″に接続されている。レバー53″には多色LED素子54″の上部発光面に対向する導光体61a″を有するスライド操作子61″が取り付けられている。なお、多色LED素子54″と導光体61a″が「発光体」に相当する。
【0060】
磁気式センサ71″は移動ブロック51″の図示しない開孔をとおして、移動ガイド41″の磁極面41a″に対面している。なお、側板31A″,31B″の上部には金属製のフレーム31Cu″が取り付けられ、このフレーム31Cu″の止め金具31a″,31b″により前面パネル100の裏面に固定される。また、基板52″にはフラットケーブル91″の一端が接続されている。そして、このフラットケーブル91″も第1実施例と同様に側板31B″の移動ブロック51″の移動方向の中央に形成されたリード線取り出し口311″から外部に引き出され、第1実施例と同様な効果が得られる。また、多色LED54″と磁気式センサ71″への通電、磁気式センサ71″からの検出信号の取り出しがフラットケーブル91″を介して行われることは第2実施例と同様である。
【0061】
この第3実施例においても、磁気式センサ71″が、移動ブロック51″を保持する移動ガイド41″自体をセンシングするので、第2実施例と同様に、加圧力により移動ガイド41″が僅かに撓んでも、磁気式センサ71″と磁極面41a″とのクリアランスは常に一定になるので、加圧力による検出精度への影響を無くすことができる。
【0062】
この第3実施例では、側板31A″,31B″を樹脂で構成しているので軽量化が図れる。また、第2の移動ガイドの役目を果たす側壁42″,42″と移動ブロック51″の凸条51b″とのクリアランスは大きくても感度や精度に影響しないので、樹脂にて構成してある程度ラフに設計してもよく、コストを低減することもできる。また、樹脂製の側板31A″,31B″を填め合わせてネジ1個でも固着が可能であるので、構造がシンプルで製造が容易である。
【0063】
以上の第3実施例では第2実施例における第2の移動ガイドの代わりに、側壁42″,42″と凸条51b″を設けるようにしているが、例えば両側板を金属板で形成し、この金属の絞り加工により、両側板に内側に出っ張る突条をそれぞれ形成し、この突条を移動ブロックの側面に摺接させて、該移動ブロックをガイドするようにしてもよい。
【0064】
以上の第2実施例および第3実施例の各スライドボリューム装置にあっても、図12あるいは図13の回路により、多色LED素子54′,54″の発光色を制御し、各スライドボリューム装置に設定された機能の確認を容易にすることができることは第1実施例と同様である。
【0065】
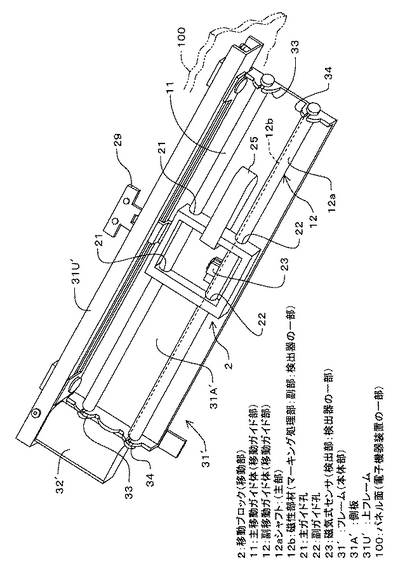
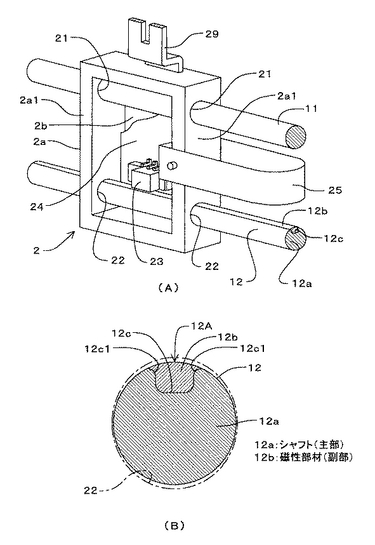
図7はスライド操作装置としての第4実施例のスライドボリューム装置の要部斜視図である。なお、以下の実施例において、副移動ガイド体12が「いずれか一方の移動ガイド体」であり、主移動ガイド体11が「他方の移動ガイド体」である。また、副ガイド孔22が「第1のガイド孔」であり、主ガイド孔21が「第2のガイド孔」である。このスライドボリューム装置は、前記パネル面100に対してその裏側で直角面を成す側板31A′と、断面コ字状の上フレーム31U′とにより「本体部」としてのフレーム31′が形成されている。なお、図11にパネル面100を示したミキシングコンソールが「電子機器装置」に相当する。上フレーム31U′の一端にはモータ32′が取り付けられている。また、側板31A′の両端には主ガイド体用爪33,33、副ガイド体用爪34,34が曲げ加工により起立されており、この主ガイド体用爪33,33間に主移動ガイド体11が、副ガイド体用爪34,34間には副移動ガイド体12が取り付けられている。この主移動ガイド体11と副移動ガイド体12は、側板31A′の長手方向に沿って互いに平行な2条からなる「移動ガイド部」を構成している。
【0066】
主移動ガイド体11は丸棒状のステンレス製のシャフトであり、副移動ガイド体12は後述説明するように非磁性ステンレス製のシャフトに磁性部材をインサート成型した丸棒状の部材で構成されている。主移動ガイド体11と副移動ガイド体12には、「移動部」としての移動ブロック2が主移動ガイド体11と副移動ガイド体12の長手方向に摺動自在となるように取り付けられている。また、移動ブロック2には図示しない操作子を填め込むためのレバー29が取り付けられている。なお、前記実施例と同様に、モータ32′はスライドボリューム装置のスライド操作子の位置を自動設定するために、移動ブロック2を往復移動するものである。
【0067】
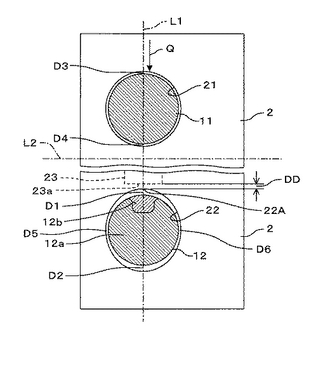
図8は移動ブロック2の要部斜視図(図8(A) )及び副移動ガイド体12の断面図(図8(B) )、図9は移動ブロック2の一部側面と主移動ガイド体11及び副移動ガイド体12のクリアランスを説明する図である。なお、図9ではクリアランスの寸法を誇張して図示してある。移動ブロック2は樹脂成形されたものであり、ロ字状の枠体2aと基板取付部2bとで構成されており、この移動ブロック2の枠体2aの対向部分2a1,2a1には、上側に主移動ガイド体11が嵌挿される主ガイド孔21,21と、下側に副移動ガイド体12が嵌挿される副ガイド孔22,22がそれぞれ形成されている。基板取付部2bには検出部としての磁気式センサ23が固着される基板24が取り付けられ、この基板24にはフラットケーブル25が接続されている。
【0068】
副移動ガイド体12は、非磁性ステンレスの異形引き抜きにより形成された略丸棒状のシャフト(主部)12aと、該シャフト12aの長手方向に形成された溝12cに埋め込んだ磁性部材(副部)12bとで構成されている。図8(B) に示すように、溝12cの深さはシャフト12aの直径の4分の1程度であり、この溝12cの外周縁部12c1は丸みをもって形成されている。これにより、磁性部材12bのインサート成型後のひけ等により磁性部材12bとシャフト12aとの間に隙間ができるのを防止している。シャフト12aは非磁性であるが、磁性部材12bはPPS樹脂(ポリフェニレンスルフィド樹脂)とフェライト粒子とを混合した(練り込んだ)ものである。そして、この磁性部材12bには、該副移動ガイド体12の磁気式センサ23に対向する対向面12A側からの着磁によるマーキング処理がなされている。すなわち、磁性部材12bには長手方向にN極とS極とを交互に例えば330μm周期(ピッチ)で分極して磁極が形成されている。これは前記実施例と同様ないわゆる「マグネスケール(着磁スケール)」である。なお、磁性部材12bはPPSとフェライト樹脂の混合により形成されているので保磁力が高く、安価である。
【0069】
また、磁気式センサ23は2つの磁気抵抗素子(MR素子)を備えており、例えば図9に破線で示すように、磁気式センサ23は、ガイド体対向部23aが副ガイド孔22から所定距離DDを隔てるように設けられている。そして、移動ブロック2が主移動ガイド体11と副移動ガイド体12に沿って移動するとき磁気式センサ23が磁性部材12bの磁極を感知して信号を出力する。なお、磁性部材12bの磁極は位相差をもつ2列から構成されており、この磁気式センサ23による検出原理は前記磁気式センサ7等による前記実施例と同様である。
【0070】
図9に示すように、主移動ガイド体11、主ガイド孔21及び副移動ガイド12の断面形状は真円であるが、副ガイド孔22の断面形状は、主ガイド孔21と副ガイド孔22の中心を結ぶ線L1の方向に僅かに縦長になった楕円形状である。なお、この実施例では、上記線L1の方向を「上下方向」、線L1と直角な線L2の方向を「左右方向」という。
【0071】
この第4実施例における寸法は以下のとおりである。主移動ガイド体11と副移動ガイド体12の直径は共に4.0mm、主ガイド孔21の直径は4.1mm、副ガイド孔22の左右方向の直径(短径)は4.1mm、副ガイド孔22の上下方向の直径(長径)は4.3mmである。
【0072】
すなわち、移動ブロック2を移動操作するときに加えられる加圧方向は図9の矢印Qの方向であり、副ガイド孔22と副移動ガイド体12との加圧方向Qのクリアランス(D1+D2)のほうが、主ガイド孔21と主移動ガイド体11との加圧方向Qのクリアランス(D3+D4)より大きくなっている。したがって、例えば加圧力が強い場合は主移動ガイド体11に撓みが生じる可能性もあるが、この撓みが生じても副ガイド孔22の上の縁22Aが磁性部材12bに接触することなく、この磁性部材12bの摩耗等を防止できる。
【0073】
また、磁気式センサ23のガイド体対向部23aも副ガイド孔22の上の縁22Aから距離DDだけ離れているので磁性部材12bに接触接触することがないが、この場合には、磁気式センサ23のガイド体対向部23aは磁性部材12bに近づき、磁気式センサ23による磁性部材12bの磁界の感知能力が上がるように作用する。したがって、主移動ガイド体11に撓みがない通常の状態において磁気式センサ23の感知能力を定格に設定しておけは、上記撓みが生じた場合、逆に磁気式センサ23の感度上昇につながり、検出精度に何ら影響がない。
【0074】
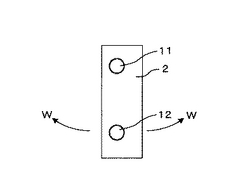
また、上記のクリアランスの関係は、逆に、主ガイド孔21と主移動ガイド体11との加圧方向Qのクリアランス(D3+D4)が、副ガイド孔22と副移動ガイド体12との加圧方向Qのクリアランス(D1+D2)より小さくしていることになり、この主ガイド孔21及び主移動ガイド体11により、移動ブロック2に対する加圧方向のガタを無くし、スライド操作の操作性を良くしている。さらに、副ガイド孔22と副移動ガイド体12との左右方向L2のクリアランス(D5+D6)は主ガイド孔21と主移動ガイド体11とのクリアランス(D3+D4)と同じ(同程度でよい)であり、図10に示したような移動ブロック2の左右方向の揺れ(矢印W)を防止できる。このように、互いに平行な主移動ガイド体11と副移動ガイド体12の2条からなる移動ガイド部を備えているので、移動ブロック2のスライド操作が安定し、操作時の加圧力による磁気式センサ23のセンサ検出精度への影響をさらに低減することができる。また、この第4実施例は磁気式センサ23のガイド体対向部23aが下向きとなっているので、このガイド体対向部23aへの埃等の影響も防止できる。
【0075】
なお、主移動ガイド体11が「主」であるゆえんは、スライド方向の方向性を確保していることにあり、副移動ガイド体12が「副」であるゆえんは、移動ブロック2の揺れを防止していることにある。そして、これらが2条であることから、例えば、2条間の上下相当の幅をもつガイドでガイドする場合よりも、移動ブロックとの接触面積が少なく、すなわち摩擦が少なく、スムーズなスライド操作が可能となっている。また、ガイド部材が軽くなり、装置全体の軽量化にもなる。
【0076】
ここで、第4実施例では、副移動ガイド12を、主部であるステンレス製のシャフト12aと副部である磁性部材12bとで構成した例であるが、次の第5実施例のように、上側の主移動ガイド11を主部であるステンレス製のシャフトと磁性部材とで構成してもよい。この例として図6の二点鎖線の吹き出し部に断面を示した。すなわち、図6における移動ブロック51″のガイド保持部5a″に形成しされた軸孔(ガイド孔)51a″を貫通する主移動ガイド411を、ステンレス製のシャフト411aと磁性部材411bとで構成する。この構成は第4実施例におけるシャフト12aと磁性部材12bと同様である。そして、この磁性部材411bを下側にて配置し、この磁性部材411bの対向面411Aに磁気式センサ23(第4実施例と同様)を対向配置する。この場合、操作時に押圧力が加わるとギャップG1が広がるようになるが、主移動ガイド411と軸孔51a″とのクリアランスを正確に作り込んでおくことにより、ギャップG1の変化を小さくして検出精度に影響しないようにできる。また、この第5実施例において、図示は省略するが下側の副移動ガイドとこの副移動ガイドが貫通する副ガイド孔との関係を以下のようにすることができる。すなわち、副ガイド孔を縦長(図9における線L1方向を長手方向とする孔)とし、この副ガイド孔と副移動ガイドは前記図10に示した横揺れ防止の機能だけでよいので、ラフな設計とすることができる。
【0077】
なお、上記第4及び第5実施例においても、前記実施例と同様にスライド操作子にLED等による発光体を設けるようにしてもよい。そして、この第4実施例のスライドボリューム装置にあっても、図12あるいは図13の回路により、多色LED素子の発光色を制御し、各スライドボリューム装置に設定された機能の確認を容易にすることができることは第1実施例と同様である。すなわち、第4実施例の磁気式センサ23と磁性部材12b(副移動ガイド体12)及び磁気式センサ23の出力信号を処理する回路により構成されるスライドボリューム装置が図12、図13のボリューム回路V1に相当する。さらにこの第4実施例に用いるLED等による発光体が図12の多色LED素子54あるいは図13の赤色LED54a、緑色LED54b、青色LED54cに相当し、これらのLEDへの駆動電流は基板24に接続されたフラットケーブル25から供給される。さらにこの第4実施例におけるフラット検出25も、前記リード線取り出し口311と同様な取り出し口から引き出すように構成し、この取り出し口の部分で軽く固定することもでき、移動ブロック2が移動しても、側板の外側からみてフラットケーブル25が、通常のプリンタのヘッドに接続されたケーブルのようにはブラブラしないので、当該スライドボリューム装置の機器内での収まりが良くなる。
【0078】
上記の各実施例は磁気式により非接触式を実現した例であるが、光学式によって非接触式としてもよい。この場合、例えば図1の例では第2の移動ガイド42の下面(磁性面43a相当の面)、図3、図6の例では移動ガイド41′,41″の下面(磁性面41a′,41a″相当の面)に例えば白黒のバーコード状の一定周期のパターンを2列形成し、磁気式センサ71,71′,71″,23の変わりに発光ダイオードとフォトダイオード等で構成したフォトセンサを設け、上記白黒パターンによる2列に対応する前記位相差をもったパルス信号を検出信号として得るようにする。この光学式の場合も、多色LED素子54,54′,54″への通電とフォトセンサへの通電はフラットケーブル91,91′,91″により行う。また、この場合にも、加圧力が生じてもフォトセンサで第2の移動ガイド42、第1の移動ガイド41′,41″自体をセンシングするので、フォトセンサとパターン面とのクリアランス(ギャップ)を一定に保つことができるので、前記磁気式と同様に検出精度が確保される。
【0079】
また、磁気式、光学式の何れの場合も、操作時に当接部51eあるいはガイド保持部5a,5a″が、また、第4実施例では主ガイド孔21が加圧方向(矢印Q方向)のストッパとして働いて、第2の移動ガイド42に対する移動ブロック51の加圧方向の位置、移動ガイド41′,41″に対する移動ブロック51′,51″の加圧方向の位置がそれぞれ一定に規制されるので、操作感(摺動フィーリング)が向上するとともに、装置全体に対する垂直荷重の対策も施されたものとなる。
【0080】
なお、センサ(検出部)と共にセンシング手段を構成する移動ガイドの素材は、実施形態のものが好ましいが、本発明はこれに限定されるものではない。
【図面の簡単な説明】
【0081】
【図1】本発明の第1実施形態におけるスライドボリューム装置の移動ブロックの要部斜視図である。
【図2】同スライドボリューム装置の要部分解斜視図である。
【図3】本発明の第2実施形態におけるスライドボリューム装置の要部斜視図である。
【図4】実施例における磁気式センサと移動ガイドとのクリアランスを説明する図である。
【図5】実施例における移動ガイドの変形例を示す断面図である。
【図6】本発明の第3実施形態におけるスライドボリューム装置の要部断面図である。
【図7】本発明の第4実施形態におけるスライドボリューム装置の要部斜視図である。
【図8】第4実施形態における移動ブロックの要部斜視図及び副移動ガイド体の断面図である。
【図9】第4実施形態における移動ブロックの一部側面と主移動ガイド体及び副移動ガイド体の断面を示す図である。
【図10】第4実施形態における移動ブロックの横揺れ防止を説明する図である。
【図11】本発明の実施形態におけるミキシングコンソールのパネル面の全体図である。
【図12】実施形態におけるスライドボリューム装置を用いたパラメータ設定装置の回路図である。
【図13】同スライドボリューム装置を用いたパラメータ設定装置の他の回路図である。
【符号の説明】
【0082】
2…移動ブロック(移動部)、11…主移動ガイド体(移動ガイド部)、12…副移動ガイド体(移動ガイド部)、12a…シャフト(主部)、12b…磁性部材(マーキング処理、副部、検出器の一部)、12A…対向面、21…主ガイド孔、22…副ガイド孔、23…磁気式センサ(検出部、検出器の一部)、23a…ガイド体対向部、31A′…側板、31U′…上フレーム、31,31′…フレーム(固定部、本体部)、311…リード線取り出し口、41、41′…第1の移動ガイド、41″…移動ガイド、42、42′…第2の移動ガイド、421a、41a′、41a″…磁極面(マーキング処理部、検出器の一部)、51、51′、51″…移動ブロック(移動部)、51e…当接部、54、54′、54″…多色LED素子(発光体)、61、61′…スライド操作子、61a、61a′…導光体(発光体)、71、71′、71″、23…磁気式センサ(検出部、検出器の一部)、91、91′、91″…フラットケーブル(リード線)、411…主移動ガイド体、411a…シャフト(主部)、411b…磁性部材(マーキング処理、副部、検出器の一部)
【特許請求の範囲】
【請求項1】
固定部とこの固定部に対して移動させる移動部とを有し、前記固定部に対する前記移動部の移動によって移動信号を出力するスライド操作装置において、
前記固定部にその長手方向に沿って設けられるとともに、前記移動部を摺動自在に保持する移動ガイドと、
前記移動ガイドに沿って前記移動部が移動する操作状態をセンシングするセンシング手段とを備え、
前記センシング手段は移動ガイドそのものと、前記移動部に設けられ該移動ガイドをセンシングして前記移動信号を出力する検出部とからなり、
前記検出部を、前記移動部を移動させるときに加圧する方向と反対方向に対峙して設けたことを特徴とするスライド操作装置。
【請求項2】
固定部とこの固定部に対して移動させる移動部とを有し、前記固定部に対する前記移動部の移動によって移動信号を出力するスライド操作装置において、
前記固定部にその長手方向に沿って前記移動部を摺動自在に保持する移動ガイドを設け、
前記移動部に、前記移動ガイドによってその長手方向にガイドされて該移動部が移動するときに該移動ガイドをセンシングして前記移動信号を出力する検出部を設け、
前記移動部は、該移動部を移動させる時に加圧する方向に前記移動ガイドに当接する当接部を有し、
前記検出部は、前記移動部を移動させる時に加圧する方向に対向するように、前記移動ガイドを介した前記移動部の部位に設けたことを特徴とするスライド操作装置。
【請求項3】
請求項1または2記載のスライド操作装置であって、
前記移動ガイドに、多数分極した磁極を該移動ガイドの長手方向に形成したマーキング処理部を有し、
前記検出部は該マーキング処理部の磁極の磁界を検出する磁気式センサであることを特徴とするスライド操作装置。
【請求項4】
請求項1または2記載のスライド操作装置であって、
前記移動ガイドに、濃淡のパターンを該移動ガイドの長手方向に形成したマーキング処理部を有し、
前記検出部は該マーキング処理部のパターンの変化を光学的に検出する光学式センサであることを特徴とするスライド操作装置。
【請求項5】
請求項1、2、3または4記載のスライド操作装置であって、
前記移動部に取り付けられたスライド操作子に発光体を設けたことを特徴とするスライド操作装置。
【請求項6】
請求項1、2、3、4または5記載のスライド操作装置であって、
前記検出部に接続されるリード線を取り出すリード線取り出し口を前記移動部の移動方向の中央に設けたことを特徴とするスライド操作装置。
【請求項7】
電子機器装置に対し固定される本体部と、この本体部に対して移動される移動部とからなり、前記移動部の移動によって移動信号を出力する検出器を有したスライド操作装置において、
前記本体部に固定されてなり、その長手方向に沿って互いに平行な第1移動ガイド体、第2移動ガイド体からなる2条の移動ガイド部を設け、
前記第1、第2のいずれか一方の移動ガイド体は、検出器の一部としてその長手方向にマーキング処理が施されたマーキング処理部を有し、
該移動部が前記移動ガイド部によってガイドされその長手方向に移動することで前記マーキング処理部に対して対向移動されることによって前記移動信号を発生する検出部を前記移動部に設け、
前記検出部は前記いずれか一方の移動ガイド体に対向する移動ガイド体対向部を有し、前記いずれか一方の移動ガイド体は前記検出部の移動ガイド体対向部に対する対向面にその長手方向に沿って前記マーキング処理が施されていることを特徴とするスライド操作装置。
【請求項8】
前記検出部は、前記移動部を移動させるときに加圧する方向に向けて、前記いずれか一方の移動ガイド体を介した前記移動部の部位に設けたことを特徴とする請求項7に記載のスライド操作装置。
【請求項9】
前記移動部は、前記いずれか一方の移動ガイド体を貫通する第1のガイド孔と前記他方の移動ガイド体を貫通する第2のガイド孔とを有し、
前記第1のガイド孔のほうが前記第2のガイド孔よりも、前記移動部を移動させるときに加圧する加圧方向に大きなクリアランスを有することを特徴とする請求項7または8に記載のスライド操作装置。
【請求項10】
前記第2のガイド孔における前記加圧方向のクリアランスを、前記第1のガイド孔における前記加圧方向のクリアランスより小さくしたことを特徴とする請求項9に記載のスライド操作装置。
【請求項11】
前記いずれか一方の移動ガイド体は、棒状の剛性を有する非磁性体を主軸とする主部と、該主部の長手方向に沿って設けた着磁スケールを施したマーキング処理部としての副部とからなることを特徴とする請求項7乃至10のいずれか一項に記載のスライド操作装置。
【請求項1】
固定部とこの固定部に対して移動させる移動部とを有し、前記固定部に対する前記移動部の移動によって移動信号を出力するスライド操作装置において、
前記固定部にその長手方向に沿って設けられるとともに、前記移動部を摺動自在に保持する移動ガイドと、
前記移動ガイドに沿って前記移動部が移動する操作状態をセンシングするセンシング手段とを備え、
前記センシング手段は移動ガイドそのものと、前記移動部に設けられ該移動ガイドをセンシングして前記移動信号を出力する検出部とからなり、
前記検出部を、前記移動部を移動させるときに加圧する方向と反対方向に対峙して設けたことを特徴とするスライド操作装置。
【請求項2】
固定部とこの固定部に対して移動させる移動部とを有し、前記固定部に対する前記移動部の移動によって移動信号を出力するスライド操作装置において、
前記固定部にその長手方向に沿って前記移動部を摺動自在に保持する移動ガイドを設け、
前記移動部に、前記移動ガイドによってその長手方向にガイドされて該移動部が移動するときに該移動ガイドをセンシングして前記移動信号を出力する検出部を設け、
前記移動部は、該移動部を移動させる時に加圧する方向に前記移動ガイドに当接する当接部を有し、
前記検出部は、前記移動部を移動させる時に加圧する方向に対向するように、前記移動ガイドを介した前記移動部の部位に設けたことを特徴とするスライド操作装置。
【請求項3】
請求項1または2記載のスライド操作装置であって、
前記移動ガイドに、多数分極した磁極を該移動ガイドの長手方向に形成したマーキング処理部を有し、
前記検出部は該マーキング処理部の磁極の磁界を検出する磁気式センサであることを特徴とするスライド操作装置。
【請求項4】
請求項1または2記載のスライド操作装置であって、
前記移動ガイドに、濃淡のパターンを該移動ガイドの長手方向に形成したマーキング処理部を有し、
前記検出部は該マーキング処理部のパターンの変化を光学的に検出する光学式センサであることを特徴とするスライド操作装置。
【請求項5】
請求項1、2、3または4記載のスライド操作装置であって、
前記移動部に取り付けられたスライド操作子に発光体を設けたことを特徴とするスライド操作装置。
【請求項6】
請求項1、2、3、4または5記載のスライド操作装置であって、
前記検出部に接続されるリード線を取り出すリード線取り出し口を前記移動部の移動方向の中央に設けたことを特徴とするスライド操作装置。
【請求項7】
電子機器装置に対し固定される本体部と、この本体部に対して移動される移動部とからなり、前記移動部の移動によって移動信号を出力する検出器を有したスライド操作装置において、
前記本体部に固定されてなり、その長手方向に沿って互いに平行な第1移動ガイド体、第2移動ガイド体からなる2条の移動ガイド部を設け、
前記第1、第2のいずれか一方の移動ガイド体は、検出器の一部としてその長手方向にマーキング処理が施されたマーキング処理部を有し、
該移動部が前記移動ガイド部によってガイドされその長手方向に移動することで前記マーキング処理部に対して対向移動されることによって前記移動信号を発生する検出部を前記移動部に設け、
前記検出部は前記いずれか一方の移動ガイド体に対向する移動ガイド体対向部を有し、前記いずれか一方の移動ガイド体は前記検出部の移動ガイド体対向部に対する対向面にその長手方向に沿って前記マーキング処理が施されていることを特徴とするスライド操作装置。
【請求項8】
前記検出部は、前記移動部を移動させるときに加圧する方向に向けて、前記いずれか一方の移動ガイド体を介した前記移動部の部位に設けたことを特徴とする請求項7に記載のスライド操作装置。
【請求項9】
前記移動部は、前記いずれか一方の移動ガイド体を貫通する第1のガイド孔と前記他方の移動ガイド体を貫通する第2のガイド孔とを有し、
前記第1のガイド孔のほうが前記第2のガイド孔よりも、前記移動部を移動させるときに加圧する加圧方向に大きなクリアランスを有することを特徴とする請求項7または8に記載のスライド操作装置。
【請求項10】
前記第2のガイド孔における前記加圧方向のクリアランスを、前記第1のガイド孔における前記加圧方向のクリアランスより小さくしたことを特徴とする請求項9に記載のスライド操作装置。
【請求項11】
前記いずれか一方の移動ガイド体は、棒状の剛性を有する非磁性体を主軸とする主部と、該主部の長手方向に沿って設けた着磁スケールを施したマーキング処理部としての副部とからなることを特徴とする請求項7乃至10のいずれか一項に記載のスライド操作装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2006−49302(P2006−49302A)
【公開日】平成18年2月16日(2006.2.16)
【国際特許分類】
【出願番号】特願2005−195236(P2005−195236)
【出願日】平成17年7月4日(2005.7.4)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.マグネスケール
【出願人】(000004075)ヤマハ株式会社 (5,930)
【Fターム(参考)】
【公開日】平成18年2月16日(2006.2.16)
【国際特許分類】
【出願日】平成17年7月4日(2005.7.4)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.マグネスケール
【出願人】(000004075)ヤマハ株式会社 (5,930)
【Fターム(参考)】
[ Back to top ]