
スライバを形成する装置
本発明は、コーミング機械のコーミング箇所(1)において形成された繊維フリース(V)からスライバ(F1)を形成する装置であって、繊維フリース(V)がローラ対(17,30)のクランプ箇所(31)に供給され、該ローラ対(17,30)は、駆動装置に接続されたローラ(17)と押圧ローラ(30)とから成っていて、搬送方向(F)で見て繊維フリース(V)はクランプ箇所(31)の後ろでまとめられ、ホッパ(39)を介して、駆動装置(G,M)に接続されたプレスローラ対(K)に供給される形式のもの関する。このような形式の装置において、装置を簡単化するため及び誤ったドラフトを回避するために、繊維フリース(V)は、搬送方向(F)で見て、ローラ対(17,30)のクランプ箇所(31)の後ろで、駆動されるローラ(17)の周面(U)の領域において、ホッパ(39)と後続のプレスローラ対(K)とに引き渡され、該プレスローラ対(K)の一方のプレスローラ(K1)が、駆動されるローラ(17)に回動不能にかつ同軸的に配置されている。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、コーミング機械のコーミング箇所において形成された繊維フリースからスライバを形成する装置であって、繊維フリースがローラ対のクランプ箇所に供給され、該ローラ対は、駆動装置に接続されたローラと押圧ローラとから成っていて、搬送方向で見て繊維フリースはクランプ箇所の後ろでまとめられ、ホッパを介して、駆動装置に接続されたプレスローラ対に供給される形式のものに関する。
【0002】
実地において公知の装置では、コーミング機械のコーミング箇所において形成された繊維フリースは、ローラ対のクランプ箇所に供給され、次いで偏心的に(横方向に)引き出されて、スライバ形成のためにホッパに供給される。この場合ホッパ(圧縮機とも呼ばれる)には、駆動装置に接続されたカレンダローラ対が後置されており、このカレンダローラ対を介して、形成されたスライバは後続の搬送テーブルに送り出される。このような装置は例えば公開されたDE10300317A1に開示されている。
【0003】
さらにWO2006/012758A1に基づいて公知の装置では、引出し装置によって引き出されてコーミングされた繊維集合体は、フリース形成のために、負圧源に接続されたスクリーンドラムに送られる。このスクリーンドラムは駆動装置を備えていて、形成された繊維フリースを引出しローラ対のクランプ箇所に向かって搬送し、この引出しローラ対を介して繊維フリースはスクリーンドラムから引き出されて、後続のホッパに供給され、このホッパにおいてスライバへと圧縮されかつまとめられる。ホッパの後ろにおいて、圧縮された繊維材料は駆動されるカレンダローラ対に供給され、このカレンダローラ対において、スライバはさらに圧縮される。
【0004】
同様な装置は、EP370340にも開示されている。
【0005】
上記公知の構成では、カレンダローラを駆動するために特別な駆動軸が必要である。さらに、繊維フリースを引出しローラのクランプ箇所から、後続のカレンダローラを備えたホッパに引き渡すために、特別なガイド装置が必要である。このガイド装置の領域において、繊維材料における誤ったドラフト(Fehlverzug)の生じること及び繊維浮遊物による汚染の生じることがある。
【0006】
ゆえに本発明の課題は、コーミング機械において繊維フリースからスライバを形成する装置を改良して、公知の解決策を改善して、必要な駆動軸を減らしながら、コンパクトで安価な装置を得ることである。
【0007】
この課題を解決するために、本発明の構成では、冒頭に述べた形式の装置において、繊維フリースは、搬送方向で見て、ローラ対のクランプ箇所の後ろで、駆動されるローラの周面の領域において、ホッパと後続のプレスローラ対とに引き渡され、該プレスローラ対の一方のプレスローラが、駆動されるローラに回動不能にかつ同軸的に配置されているようにした。
【0008】
この場合プレスローラは、駆動されるローラに直に結合されていても、又は駆動されるローラの駆動軸に回動不能に固定されていてもよい。
【0009】
本発明のように構成されていると、カレンダローラ対の少なくとも1つの特別な駆動軸を節約することができる。それというのは、カレンダローラのうちの1つは、ローラ対の駆動されるローラの駆動軸に直接的にかつ同軸的に固定されているからである。本発明の構成によってさらに、クランプ箇所を形成するローラ対の回転数とカレンダローラ対の回転数とは、絶対に同じであり、これにより誤ったドラフトは確実に回避される。さらに、繊維フリースが駆動されるローラの周面の領域に直に案内されるので、クランプ箇所からホッパに到る経路における、繊維フリースのための付加的なガイド装置は不要になる。
【0010】
「ホッパ」という概念は、一般的には、繊維材料をスライバにまとめるための「圧縮エレメント」と理解することができ、スライバはこの場合さらなる圧縮のために、後続のカレンダローラ対に供給される。この場合ホッパは、相応な設計形状によって、スライバをカレンダローラ対のクランプ箇所に正確に供給する、という課題を担っている。
【0011】
駆動されるローラの周面における繊維フリースのガイドを助成するために、本発明の別の構成では、ローラ対のクランプ箇所とホッパとの間に、駆動されるローラの周面の領域において延在する、繊維フリースのための少なくとも1つの定置のガイド手段が配置されている。
【0012】
繊維フリースを側部においてまとめるため及びまとめられた繊維フリースをホッパへと規定された状態で引き渡すために、本発明の別の構成では、ガイド手段が少なくとも1つのサイドガイドを有していて、該サイドガイドは繊維フリースの搬送路内に進入していて、駆動されるローラの回転軸に対して鋭角を成してホッパにまで延びている。
【0013】
このように構成されていると、繊維フリースの縁部領域をも、まとめる際に所望のようにかつ損傷なしにホッパに到るまで案内することが保証される。「周面の領域において延在するガイド手段」という概念には、ガイド手段が駆動されるローラの周面の輪郭に正確に追従していないような解決策も含まれる。これについては以下の実施形態においてさらに詳しく述べる。
【0014】
繊維フリースをクランプ箇所の後ろで、駆動されるローラの回転する表面から引き出すため及びホッパに優しくもしくは穏やかに引き渡すために、本発明の別の構成では、ガイド手段は下側のガイド面を備えており、該ガイド面は、駆動されるローラの周面の領域において延びていて、繊維フリースを下側面においてホッパへの引渡し時に支持するようになっている。
【0015】
別の有利な構成では、ホッパとガイド手段とは互いに結合されている。この場合ホッパとガイド手段とは一体の成形部材として形成されていると有利である。このように構成されていると、ホッパを一体に組み込まれたガイド手段を製造することができ、ガイド面は不都合な中断部なしに最適に、繊維フリースの優しいもしくは穏やかなガイドを可能ならしめるように設計することができる。これはさらに、ガイド手段の表面の相応な形成によって助成することができる。さらに一体の成形部材をプラスチック製の射出成形部材として製造すると、成形形状を自由に設計することができる。
【0016】
本発明の別の有利な構成では、ローラに固定されたプレスローラは、ローラの一端部に固定されていて、該端部はクランプ箇所の領域の外に位置している。このように構成されていると、ホッパによる引出し領域は、供給されるフリース幅の外に位置することになり、これにより、例えばDE10300317A1にも記載されているように、継ぎ箇所もしくは併合箇所の完全な分配配置が可能になる。
【0017】
本発明のさらに別の構成では、ローラに固定されたプレスローラと共にプレスローラ対を形成する、回転可能に支承されたプレスローラは、ローラに固定されたプレスローラの回転軸に対して横方向に可動に支承されていて、ばねエレメントによって、ローラに固定されたプレスローラに向かって押圧される。
【0018】
さらに、少なくとも1つのセンサが設けられていて、該センサは、可動に支承されたプレスローラの運動を感知するという構成によって、形成されるスライバの連続的な監視を行うことができる。
【0019】
そのために本発明の別の構成では、センサから制御ユニットに送られた、質量不均一性(CV値)を求めるための信号を評価するために、制御ユニットが設けられている。このように構成されていると、相応なクランプ箇所における形成されたスライバの品質特性を連続的に検知することができ、かつ必要とあれば、品質(エラーのあるスライバを含む)が所定の許容範囲から外れた場合には、相応な干渉もしくは処置を行うことできる。このような干渉もしくは処置は、例えば、信号発信による当該クランプ箇所の停止を含むことができる。
【0020】
本発明のさらに別の構成では、プレスローラはその外周面に歯車状の隆起部を備えていて、該隆起部はプレスローラの作業位置において形状結合式に互いに係合するようになっている。このように構成されていると、プレスローラのうちの1つだけを駆動手段を介して駆動するだけでよく、第2のプレスローラは歯車状の隆起部を介して、駆動される第1のプレスローラによって確実に一緒に駆動することができる。これによってまた、両方のプレスローラの間において、スライバの品質に対して不都合に作用するおそれのあるスリップの発生が、阻止される。
【0021】
プレスローラの間における繊維材料の穏やかなもしくは優しい搬送のために、本発明の別の構成では、隆起部は、丸く面取りされた正弦波の形状を有している。
【0022】
本発明の別の有利な構成では、ローラ対の駆動されるローラは、負圧源に接続されたスクリーンドラムであり、該スクリーンドラムには、繊維フリースを形成するために、コーミング兼デタッチング装置によってコーミングされた繊維集合体が断続的に供給される。このような装置を用いることによって、例えばWO2006/012758A1に開示されている公知のコーミング機械において従来必要であった、ピルガー成形に用いられるような往復運動(Pilgerschrittbewegung)を回避することができる。
【0023】
スクリーンドラムの本発明による使用との関連において、本発明の別の構成では、コーミング兼デタッチング装置がニッパユニットから成っていて、該ニッパユニットにコーミングシリンダが配属されていて、該コーミングシリンダがその外周面にコーミングセグメントとデタッチングセグメントとを備えており、該デタッチングセグメントは、接近運動可能なデタッチングローラと共にクランプ箇所を形成するようになっている。
【0024】
コーミング機械は、互いに並んで配置された8つよりも多くのコーミング箇所、例えば32個のコーミング箇所を備えて形成されていてよい。
【0025】
次に図面を参照しながら本発明の実施の形態を説明する。
【図面の簡単な説明】
【0026】
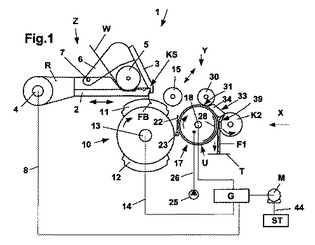
【図1】本発明によるコーミング機械のコーミングヘッドを示す側面図である。
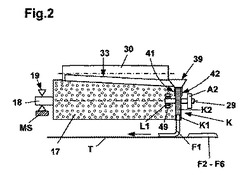
【図2】図1に示したコーミング機械の一部を、図1のXの方向から見た図である。
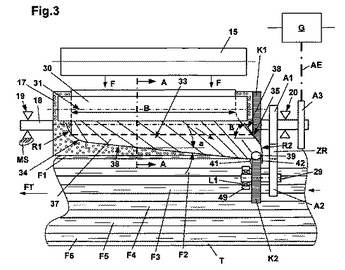
【図3】図1に示したコーミング機械の一部を、ニッパユニットを省いて、図1のYの方向から見た図である。
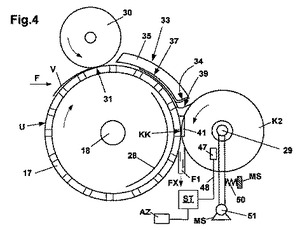
【図4】図3のA−A線に沿って断面した図である。
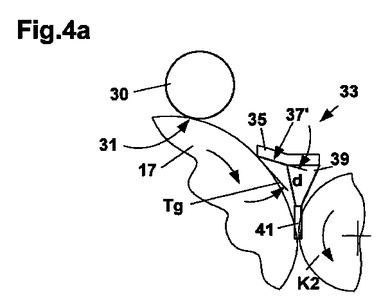
【図4a】図4に示したのとは別の実施形態を示す図である。
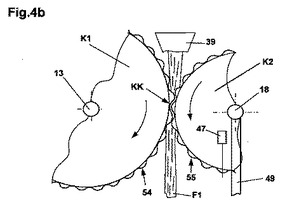
【図4b】外周面に成形体を備えた、カレンダローラ対を示す図である。
【0027】
図1には、コーミング箇所、例えばコーマとも呼ばれるコーミング機械のコーミングヘッドが概略的に側面図で示されており、この場合図面を見易くするために、ニッパユニットZ用の旋回アーム、コーミングシリンダ10をクリーニングするためのブラシローラ及び吸込み通路用の回路は、図示を省かれている。これらはしかしながら一般的に知られており、既に公開されている多くの刊行物から公知である。通常、コーミング機械は互いに並んで位置する多数のコーミング箇所を有している。図示の実施形態では、これらのコーミング箇所のうちの1つだけが示されている。
【0028】
ニッパユニットを図示のように旋回可能に取り付ける代わりに、ニッパユニット(以下、単に「ニッパ」と呼ぶ)を定置に配置することも可能であり、この場合にはクランプ箇所KSを形成するために単に上側のニッパカッタ3だけが、位置固定のニッパプレート2に対して運動する。しかしながらこのことは本発明にとって重要なことではない。図示の実施形態では、往復振動するニッパZ(二重矢印参照)を前提とし、この場合振動運動のための駆動は、伝動装置Gから行われ、この伝動装置Gは略示された駆動路8を介してニッパZのフレームRの旋回軸4と接続されている。下側のニッパプレート2の上には、回転可能に支承された供給ローラ5が配置されており、この供給ローラ5は、図示されていない断続的に作動する駆動装置と接続されていて、ラップW(又はスライバ)をニッパのクランプ箇所KSに供給するために働く。図示の実施形態ではニッパZは後方箇所に位置していて、閉鎖されている。ラップの、クランプ箇所KSを越えて進出している端部(繊維タフトFBと呼ばれる)は、コーミングシリンダ10の周囲の部分領域にわたって延在するコーミングセグメント11の針布(Garnitur)によってコーミングされる。コーミングシリンダ10は、軸13を介して機械フレームMSに回転可能に支承されていて、略示された駆動路14を介して伝動装置Gによって駆動される。
【0029】
伝動装置Gの駆動は、略示されたメインモータMによって行われ、このメインモータMは、ライン44を介して制御ユニットSTと接続されている。コーミングシリンダ10においてコーミングセグメント11の反対側には、デタッチングセグメント12が取り付けられており、このデタッチングセグメント12は、移動可能に支承されたデタッチングローラ15(二重矢印参照)と共働して、コーミングされた繊維タフトFBのデタッチングつまり引き抜きを行う。これについては後でさらに述べる。
【0030】
コーミングシリンダ10に隣接して、スクリーンドラム17が配置されており、このスクリーンドラム17は、例えば図2及び図3から分かるように、軸18を介して軸受19,20によって機械フレームMSに回転可能に支承されている。スクリーンドラム17の駆動は、駆動車A3(図3)を介して行われ、この駆動車A3は軸18に回動不能に固定されていて、略示された駆動路AEを介して伝動装置Gと駆動結合されている(図示せず)。
【0031】
スクリーンドラム17とコーミングシリンダ10との間には、旋回軸23を中心にして旋回可能なフラップ22が配置されており、このフラップ22は、位置に応じて、コーミングされた成分とデタッチされた繊維集合体とを相応に導くという働きを有している。これによって特に、コーミングされた材料(ノイル、ネップ、汚れ)がスクリーンドラム17の領域に達することが、回避されるようになっている。このフラップの機能については、例えばWO2008/011733A1に詳しく記載されている。
【0032】
同様に上記刊行物にはスクリーンドラムの相応な構成も開示されており、この場合スクリーンドラムの内部にはさらに、デタッチング過程及び継ぎ過程(Loetprozess)中における空気流を制御するために、開口を備えていて回転可能に支承された別のシリンダが設けられている。
【0033】
図示の実施形態ではしかしながら単純なスクリーンドラム17だけが示されており、このスクリーンドラム17の内室内には、定置のカバーエレメント28が配置されており、このカバーエレメント28は、スクリーンドラム17の特定領域、つまりスクリーンドラム17上に形成された繊維フリースVがスクリーンドラム17から取り除かれる領域を、覆っている。スクリーンドラム17の内室は、管路26を介して負圧源25と接続されており、この負圧源25を介してスクリーンドラム17の内部においては負圧が生ぜしめられる。
【0034】
スクリーンドラム17に対して軸平行に押圧ドラム30が回転可能に支承されており、この押圧ドラム30は例えばその自重で、スクリーンドラム17の周囲に載っている。この場合押圧ドラム30は、機械フレームMSにおける相応な案内においてスクリーンドラム17の周面に向かう方向で支承されていてよい。同様に次のような構成、すなわち押圧ドラムの支承装置が旋回アームに取り付けられていて、該旋回アームの旋回軸線がスクリーンドラム17の軸線に対して軸平行に延びていて、機械フレームMSに支承されているような構成も可能である。押圧ドラム30はスクリーンドラム17と一緒に、スクリーンドラム17と押圧ドラム30との間を通って案内される繊維フリースVのためのクランプ箇所31を形成している。このクランプ箇所31は、スクリーンドラム17の外周部Uの上で案内される繊維フリースVの幅Bにわたって延在している。押圧ドラム30は例えばその外周部にゴム被覆を備えていて、駆動されるスクリーンドラム17とフリースVとを介して摩擦によって回転運動させられる。
【0035】
搬送方向Fで見て、クランプ箇所31に接続してガイドエレメント33が取り付けられており、このガイドエレメント33を介して繊維フリースV(短く「フリース」と呼ぶ)は横方向にまとめられて、フリースホッパ39(短く「ホッパ」と呼ぶ)へと送られる。この際に面形状のフリースVは、スライバF1へとまとめられ、このスライバF1はさらなる圧縮のためにホッパ39に続いて、プレスローラ対Kのクランプ間隙KKを通して案内される(図4)。プレスローラ対は、以下の記載では、カレンダローラK1,K2を備えた「カレンダローラ対」と呼ばれる。
【0036】
ガイドエレメント33は下側のガイド面37を有しており、このガイド面37はスクリーンドラム17の周囲Uの部分領域にわたって延在しており、図3のA−A線における断面図(図4)に示されているように、スクリーンドラム17の周囲の形状に合わせられている。スクリーンドラム17の周囲Uとガイド面37との間には、ガイドエレメント33がスクリーンドラム17の周囲Uと接触して擦れないことを保証する小さな間隙だけが存在している。ガイドエレメント33は、図示されていない固定エレメントを介して、機械フレームMSと堅く結合されており、これによってスクリーンドラム17の周面Uに対して一定の位置に保たれる。
【0037】
ホッパ39に到るまでにまとめられる間にフリースVを横方向案内するために、ガイドエレメント33はサイドガイド34,35を備えており、これらのサイドガイド34,35は下側のガイド面37と結合されていて、この下側のガイド面37から、スクリーンドラム17の軸18に対して外方に向かって延びている。サイドガイド34,35は、ホッパへの引渡しまでのフリース縁部の「丸め込み」を助成するために、横断面で見て、円弧形状に形成されていてよい。クランプ箇所31を出た後でフリースVが最初に衝突するサイドガイド34は、円弧部R1を備えており、この円弧部R1は直線区分36へと移行しており、この直線区分36は、ホッパ39に到るまでに下降する角度αを成して延びている。向かい合って位置するサイドガイド35は、最初に直線区分38を有していて、この直線区分38はスクリーンドラム17の軸18に対して角度βを成しており、この直線区分38は円弧形状の区分R2において開口していて、この区分R2を介して第2のフリース縁部はホッパ39に供給される。サイドガイド35の横断面もまた円弧形状に形成されていてよい。
【0038】
図示の実施形態ではホッパ39、ガイド面37及びサイドガイド34,35は、1つの部材から、例えば1つのプラスチック射出成形部材から製造されている。ホッパ39は、下方に向かって延びるサイドガイド41,42を備えており、これらのサイドガイド41,42は、ホッパ39においてまとめられた繊維フリースを、後続のカレンダローラ対のクランプ箇所KKに到るまで横方向案内するために働く。
【0039】
図4aには図4の一区分が示されているが、この場合フリースVのためのガイド面37′は、図4におけるようにスクリーンドラム17の周囲の外側形状に合わせられているのではなく、スクリーンドラム17の接線Tgに対して角度δを成して延びていて、ホッパ39に開口している。ガイドエレメント33のガイド面37′の、図4aに示されたこのような経過もしくは形状もまた、「駆動されるローラ(17)の周面(U)の領域において延在する、定置のガイド手段」という請求項記載の概念に含まれている。
【0040】
請求項に記載されかつ例えば図3に示されるように、カレンダローラ対Kのうちの1つのカレンダローラK1は、相対回動不能にかつ同軸的にスクリーンドラム17に固定されていて、フリースVがクランプ箇所31への供給時に幅Bをもって延びている領域の外側に位置している。第2のカレンダローラK2は軸受L1を介して旋回アーム49に回転可能に支承されており、この旋回アーム49は旋回軸51を中心にして旋回可能に機械フレームMSに取り付けられている。
【0041】
旋回アーム49、ひいてはカレンダローラK2は、機械フレームMSに支持されたばね50によってカレンダローラK1に向かって押圧される。これによって圧力が、カレンダローラK1,K2のクランプ箇所KKにおける繊維材料に加えられ、この繊維材料をさらに圧縮し、これにより保持力を高めることができる。図示のばね50の代わりに、例えばベローズシリンダを使用することも可能である。
【0042】
カレンダローラK1に向かってのカレンダローラK2の旋回運動は、相応なリミットストッパ(図示せず)を設けることによって制限することができ、これにより、カレンダローラK1におけるカレンダローラK2の完全な接触を回避することができる。
【0043】
旋回アーム49の運動は、機械フレームMSに不動に取り付けられたセンサ47によって監視され、このセンサ47の信号はライン48を介して中央の制御ユニットSTに伝達される。そして信号は制御ユニットSTにおいて、内蔵されたプログラムを用いて評価される。旋回アーム49の旋回運動を感知することによって、カレンダローラK2の運動が検出され、この運動は、クランプ箇所KKを通って案内される繊維材料の質量変動によって生ぜしめられる。これによって質量経過をCV値として求めて、示すことができる。表示は例えば、制御ユニットSTと接続された表示装置AZ(例えばディスプレイ)において行うことができる。求められたCV値が所定の許容限界値の外で移動する場合には、制御ユニットSTを介して付加的な警告灯を作動させて、相応なコーミング箇所を停止することができる。カレンダローラK2の駆動は、駆動車A1とベルトZR(例えば歯付きベルト)を介して駆動結合されている駆動車A2を介して行われる。ベルトZRは、カレンダローラK1,K2の軸の間における運動を補償するために、図示されていないテンション装置によって緊張させられる。歯車伝動装置を使用することも可能である。駆動車A2は、カレンダローラK2が堅く結合されている軸29に回動不能に固定されている。軸29は図示のように、旋回アーム49に配置された軸受箇所L1に支承されている。駆動車A1は、スクリーンドラム17の軸18に固定されており、この軸18は同時に、カレンダローラK1がスクリーンドラム17に対して同軸的にかつ該スクリーンドラム17に堅く結合されていることに基づいて、カレンダローラK1の駆動軸でもある。これによってカレンダローラK1のための付加的な軸が節約され、スクリーンドラム17とカレンダローラK1との間における絶対的な同期が保証される。スクリーンドラム17の軸18は、軸受19,20を介して機械フレームMSに回転可能に支承されている。さらに軸18には別の駆動車A3が回動不能に固定されており、この駆動車A3は、略示された駆動エレメントAEを介して伝動装置Gと駆動結合されている。さらに可能な別の実施形態では、カレンダローラK2は、図示のように直にベルト伝動装置A1,A2,ZRを介して、駆動される軸18によってアクティブに駆動されるのではなく、ばね負荷装置(50)の作用下で摩擦により、駆動されるカレンダローラK1によって回転運動させられる。
【0044】
図4bの拡大図では、カレンダローラK2を駆動するためのさらに別の実施形態が示されている。カレンダローラK1,K2は外周部に正弦波の成形部54,55を備えており、これらの成形部54,55は図示の運転位置において、繊維材料の通過する領域において、互いに歯車のように噛み合っている。このように両方の成形部54,55が形状結合式に互いに係合していることによって、軸18を中心にして自由回転可能に支承されたカレンダローラK2は、伝動装置Gと駆動結合されているカレンダローラK1によって駆動される。つまりこの実施形態では、図3に示した実施形態におけるように、カレンダローラK2のための特別な駆動エレメントは不要である。貫通案内される繊維材料に対する成形部の作用によって、さらに、カレンダローラ対Kによって送り出されるスライバF1の固着力がさらに高められる。
【0045】
図示された装置の作用について以下に詳しく記載する:
図1に示した位置において、ニッパZは閉鎖されていて、後方位置を占めている。ニッパZのクランプ箇所KSから進出している繊維タフトFBは、コーミングシリンダ10に設けられた係合するコーミングセグメント11によってコーミングされる。フラップ22は、後続のスクリーンドラム17の外周部Uの近傍に位置しているので、コーミングされた成分(ノイル)は下方に向かって、図示されていない吸込み通路内に排出される。コーミング過程の後で、ニッパZは前方位置に移動し、今や、デタッチングローラ15に対して僅かな間隔をもって位置し、このデタッチングローラ15はその間にコーミングシリンダ10の軸13に向かって移動させられて、デタッチングセグメント12と一緒にクランプ箇所を形成する。
【0046】
デタッチングセグメント12は、コーミングシリンダ10の回転運動によって、ニッパZの前進運動中に、デタッチングローラ15の下における領域へと移動させられている。
【0047】
今や開放されたニッパZから進出している、コーミングされた繊維タフトFBの端部は、デタッチングセグメント12と上に位置するデタッチングローラ15との間におけるクランプ箇所によって把持され、これによって、この際に把持された繊維は繊維タフトFBの端部から、引き抜かれるつまり「デタッチされる」。このデタッチング過程時に生じる繊維集合体は、スクリーンドラム17において加えられた負圧の影響下で、既にスクリーンドラム17の外周部Uに載っているフリースVの端部へと載置され、重ねられる(継ぎ過程)。しかしながらスクリーンドラム17へのデタッチされた繊維集合体の引渡しが行われる前に、フラップ22は、引渡しを助成するために、旋回軸23を中心にしてコーミングシリンダ10に向かって移動させられている。この過程の詳しい説明は、例えばWO2008/011733A1に記載されている。スクリーンドラム17の上における領域のような引渡しの領域は、引渡し及び継ぎ過程のために必要な空気流を正確に制御できるようにするために、相応な仕切り板(図示せず)を備えていてよい。
【0048】
スクリーンドラム17は一定の速度で駆動され、フリースVを該スクリーンドラム17の外周部Uにおいて、押圧ドラム30とスクリーンドラム17との間のクランプ箇所31に移動させる。このクランプ箇所31を出た後でフリースVは、ガイドエレメント33の下側のガイド面37に達し、サイドガイド34に衝突する。このサイドガイド34においてフリースVは、円弧部R1の作用下で、直線区分36の斜めの配置形式(角度α)によってホッパ39へと引き渡される。サイドガイド34に向かい合って位置する側に配置された、直線区分38(角度β)と円弧部R2とを備えた別のサイドガイド35は、反対側に位置するフリース縁部をホッパ39に引き渡すことを助成する。ホッパ39に引き渡されたフリースは、これによってまとめられて圧縮され、ホッパを介して、後続の駆動されるカレンダローラ対K(K1,K2)のクランプ箇所KKに引き渡される。この引渡しは、ホッパ39に固定されたサイドガイド41,42によって助成される。これによって繊維材料は、該繊維材料がさらに圧縮されるクランプ箇所KKに達する前に、側方に逃げることが阻止される。既に述べたように、クランプ箇所KKを通して導かれる繊維材料の質量変動は、旋回運動可能に支承されたカレンダローラK2によって、旋回運動の感知によりセンサ47を介して検出し、かつ監視することができる。
【0049】
カレンダローラK1,K2から下方に向かって搬送方向FXに送り出されるスライバF1は、搬送テーブルTの上に達し、この搬送テーブルTを介してスライバF1は、隣接したコーミング箇所において製造されて送り出された別のスライバF2〜F6と一緒に、後続のドラフト装置ユニットに引き渡される。このドラフト装置ユニットに接続して、該ドラフト装置ユニットにおいて形成されたスライバをケンスに貯めるために、スライバ貯え装置が設けられていてよい。
【0050】
テーブルTは、駆動されるコンベヤ、例えばコンベヤベルトから成っている。搬送テーブルにおいて搬送されるスライバF1〜F6の数は、単に一例である。さらに多くの数のコーミング箇所(12箇所を上回る数)が、互いに並べて配置されていてもよく、このようになっていると、さらに多数のスライバが後続のドラフト装置に供給される。48箇所までの数の互いに並んで位置するコーミング箇所が可能である。
【0051】
提案された装置によって、コンパクトで単純な解決策が得られ、この場合付加的な支承装置及び駆動軸が回避され、誤ったドラフトのおそれが最小になる。本発明において提案された装置は特に、汎用のコーミング機械におけるよりも、まとめられるフリースの幅が僅かであるコーミング箇所であって、互いに並んで位置する多数(>10)のコーミング箇所を備えたコーミング機械のために有利である。
【技術分野】
【0001】
本発明は、コーミング機械のコーミング箇所において形成された繊維フリースからスライバを形成する装置であって、繊維フリースがローラ対のクランプ箇所に供給され、該ローラ対は、駆動装置に接続されたローラと押圧ローラとから成っていて、搬送方向で見て繊維フリースはクランプ箇所の後ろでまとめられ、ホッパを介して、駆動装置に接続されたプレスローラ対に供給される形式のものに関する。
【0002】
実地において公知の装置では、コーミング機械のコーミング箇所において形成された繊維フリースは、ローラ対のクランプ箇所に供給され、次いで偏心的に(横方向に)引き出されて、スライバ形成のためにホッパに供給される。この場合ホッパ(圧縮機とも呼ばれる)には、駆動装置に接続されたカレンダローラ対が後置されており、このカレンダローラ対を介して、形成されたスライバは後続の搬送テーブルに送り出される。このような装置は例えば公開されたDE10300317A1に開示されている。
【0003】
さらにWO2006/012758A1に基づいて公知の装置では、引出し装置によって引き出されてコーミングされた繊維集合体は、フリース形成のために、負圧源に接続されたスクリーンドラムに送られる。このスクリーンドラムは駆動装置を備えていて、形成された繊維フリースを引出しローラ対のクランプ箇所に向かって搬送し、この引出しローラ対を介して繊維フリースはスクリーンドラムから引き出されて、後続のホッパに供給され、このホッパにおいてスライバへと圧縮されかつまとめられる。ホッパの後ろにおいて、圧縮された繊維材料は駆動されるカレンダローラ対に供給され、このカレンダローラ対において、スライバはさらに圧縮される。
【0004】
同様な装置は、EP370340にも開示されている。
【0005】
上記公知の構成では、カレンダローラを駆動するために特別な駆動軸が必要である。さらに、繊維フリースを引出しローラのクランプ箇所から、後続のカレンダローラを備えたホッパに引き渡すために、特別なガイド装置が必要である。このガイド装置の領域において、繊維材料における誤ったドラフト(Fehlverzug)の生じること及び繊維浮遊物による汚染の生じることがある。
【0006】
ゆえに本発明の課題は、コーミング機械において繊維フリースからスライバを形成する装置を改良して、公知の解決策を改善して、必要な駆動軸を減らしながら、コンパクトで安価な装置を得ることである。
【0007】
この課題を解決するために、本発明の構成では、冒頭に述べた形式の装置において、繊維フリースは、搬送方向で見て、ローラ対のクランプ箇所の後ろで、駆動されるローラの周面の領域において、ホッパと後続のプレスローラ対とに引き渡され、該プレスローラ対の一方のプレスローラが、駆動されるローラに回動不能にかつ同軸的に配置されているようにした。
【0008】
この場合プレスローラは、駆動されるローラに直に結合されていても、又は駆動されるローラの駆動軸に回動不能に固定されていてもよい。
【0009】
本発明のように構成されていると、カレンダローラ対の少なくとも1つの特別な駆動軸を節約することができる。それというのは、カレンダローラのうちの1つは、ローラ対の駆動されるローラの駆動軸に直接的にかつ同軸的に固定されているからである。本発明の構成によってさらに、クランプ箇所を形成するローラ対の回転数とカレンダローラ対の回転数とは、絶対に同じであり、これにより誤ったドラフトは確実に回避される。さらに、繊維フリースが駆動されるローラの周面の領域に直に案内されるので、クランプ箇所からホッパに到る経路における、繊維フリースのための付加的なガイド装置は不要になる。
【0010】
「ホッパ」という概念は、一般的には、繊維材料をスライバにまとめるための「圧縮エレメント」と理解することができ、スライバはこの場合さらなる圧縮のために、後続のカレンダローラ対に供給される。この場合ホッパは、相応な設計形状によって、スライバをカレンダローラ対のクランプ箇所に正確に供給する、という課題を担っている。
【0011】
駆動されるローラの周面における繊維フリースのガイドを助成するために、本発明の別の構成では、ローラ対のクランプ箇所とホッパとの間に、駆動されるローラの周面の領域において延在する、繊維フリースのための少なくとも1つの定置のガイド手段が配置されている。
【0012】
繊維フリースを側部においてまとめるため及びまとめられた繊維フリースをホッパへと規定された状態で引き渡すために、本発明の別の構成では、ガイド手段が少なくとも1つのサイドガイドを有していて、該サイドガイドは繊維フリースの搬送路内に進入していて、駆動されるローラの回転軸に対して鋭角を成してホッパにまで延びている。
【0013】
このように構成されていると、繊維フリースの縁部領域をも、まとめる際に所望のようにかつ損傷なしにホッパに到るまで案内することが保証される。「周面の領域において延在するガイド手段」という概念には、ガイド手段が駆動されるローラの周面の輪郭に正確に追従していないような解決策も含まれる。これについては以下の実施形態においてさらに詳しく述べる。
【0014】
繊維フリースをクランプ箇所の後ろで、駆動されるローラの回転する表面から引き出すため及びホッパに優しくもしくは穏やかに引き渡すために、本発明の別の構成では、ガイド手段は下側のガイド面を備えており、該ガイド面は、駆動されるローラの周面の領域において延びていて、繊維フリースを下側面においてホッパへの引渡し時に支持するようになっている。
【0015】
別の有利な構成では、ホッパとガイド手段とは互いに結合されている。この場合ホッパとガイド手段とは一体の成形部材として形成されていると有利である。このように構成されていると、ホッパを一体に組み込まれたガイド手段を製造することができ、ガイド面は不都合な中断部なしに最適に、繊維フリースの優しいもしくは穏やかなガイドを可能ならしめるように設計することができる。これはさらに、ガイド手段の表面の相応な形成によって助成することができる。さらに一体の成形部材をプラスチック製の射出成形部材として製造すると、成形形状を自由に設計することができる。
【0016】
本発明の別の有利な構成では、ローラに固定されたプレスローラは、ローラの一端部に固定されていて、該端部はクランプ箇所の領域の外に位置している。このように構成されていると、ホッパによる引出し領域は、供給されるフリース幅の外に位置することになり、これにより、例えばDE10300317A1にも記載されているように、継ぎ箇所もしくは併合箇所の完全な分配配置が可能になる。
【0017】
本発明のさらに別の構成では、ローラに固定されたプレスローラと共にプレスローラ対を形成する、回転可能に支承されたプレスローラは、ローラに固定されたプレスローラの回転軸に対して横方向に可動に支承されていて、ばねエレメントによって、ローラに固定されたプレスローラに向かって押圧される。
【0018】
さらに、少なくとも1つのセンサが設けられていて、該センサは、可動に支承されたプレスローラの運動を感知するという構成によって、形成されるスライバの連続的な監視を行うことができる。
【0019】
そのために本発明の別の構成では、センサから制御ユニットに送られた、質量不均一性(CV値)を求めるための信号を評価するために、制御ユニットが設けられている。このように構成されていると、相応なクランプ箇所における形成されたスライバの品質特性を連続的に検知することができ、かつ必要とあれば、品質(エラーのあるスライバを含む)が所定の許容範囲から外れた場合には、相応な干渉もしくは処置を行うことできる。このような干渉もしくは処置は、例えば、信号発信による当該クランプ箇所の停止を含むことができる。
【0020】
本発明のさらに別の構成では、プレスローラはその外周面に歯車状の隆起部を備えていて、該隆起部はプレスローラの作業位置において形状結合式に互いに係合するようになっている。このように構成されていると、プレスローラのうちの1つだけを駆動手段を介して駆動するだけでよく、第2のプレスローラは歯車状の隆起部を介して、駆動される第1のプレスローラによって確実に一緒に駆動することができる。これによってまた、両方のプレスローラの間において、スライバの品質に対して不都合に作用するおそれのあるスリップの発生が、阻止される。
【0021】
プレスローラの間における繊維材料の穏やかなもしくは優しい搬送のために、本発明の別の構成では、隆起部は、丸く面取りされた正弦波の形状を有している。
【0022】
本発明の別の有利な構成では、ローラ対の駆動されるローラは、負圧源に接続されたスクリーンドラムであり、該スクリーンドラムには、繊維フリースを形成するために、コーミング兼デタッチング装置によってコーミングされた繊維集合体が断続的に供給される。このような装置を用いることによって、例えばWO2006/012758A1に開示されている公知のコーミング機械において従来必要であった、ピルガー成形に用いられるような往復運動(Pilgerschrittbewegung)を回避することができる。
【0023】
スクリーンドラムの本発明による使用との関連において、本発明の別の構成では、コーミング兼デタッチング装置がニッパユニットから成っていて、該ニッパユニットにコーミングシリンダが配属されていて、該コーミングシリンダがその外周面にコーミングセグメントとデタッチングセグメントとを備えており、該デタッチングセグメントは、接近運動可能なデタッチングローラと共にクランプ箇所を形成するようになっている。
【0024】
コーミング機械は、互いに並んで配置された8つよりも多くのコーミング箇所、例えば32個のコーミング箇所を備えて形成されていてよい。
【0025】
次に図面を参照しながら本発明の実施の形態を説明する。
【図面の簡単な説明】
【0026】
【図1】本発明によるコーミング機械のコーミングヘッドを示す側面図である。
【図2】図1に示したコーミング機械の一部を、図1のXの方向から見た図である。
【図3】図1に示したコーミング機械の一部を、ニッパユニットを省いて、図1のYの方向から見た図である。
【図4】図3のA−A線に沿って断面した図である。
【図4a】図4に示したのとは別の実施形態を示す図である。
【図4b】外周面に成形体を備えた、カレンダローラ対を示す図である。
【0027】
図1には、コーミング箇所、例えばコーマとも呼ばれるコーミング機械のコーミングヘッドが概略的に側面図で示されており、この場合図面を見易くするために、ニッパユニットZ用の旋回アーム、コーミングシリンダ10をクリーニングするためのブラシローラ及び吸込み通路用の回路は、図示を省かれている。これらはしかしながら一般的に知られており、既に公開されている多くの刊行物から公知である。通常、コーミング機械は互いに並んで位置する多数のコーミング箇所を有している。図示の実施形態では、これらのコーミング箇所のうちの1つだけが示されている。
【0028】
ニッパユニットを図示のように旋回可能に取り付ける代わりに、ニッパユニット(以下、単に「ニッパ」と呼ぶ)を定置に配置することも可能であり、この場合にはクランプ箇所KSを形成するために単に上側のニッパカッタ3だけが、位置固定のニッパプレート2に対して運動する。しかしながらこのことは本発明にとって重要なことではない。図示の実施形態では、往復振動するニッパZ(二重矢印参照)を前提とし、この場合振動運動のための駆動は、伝動装置Gから行われ、この伝動装置Gは略示された駆動路8を介してニッパZのフレームRの旋回軸4と接続されている。下側のニッパプレート2の上には、回転可能に支承された供給ローラ5が配置されており、この供給ローラ5は、図示されていない断続的に作動する駆動装置と接続されていて、ラップW(又はスライバ)をニッパのクランプ箇所KSに供給するために働く。図示の実施形態ではニッパZは後方箇所に位置していて、閉鎖されている。ラップの、クランプ箇所KSを越えて進出している端部(繊維タフトFBと呼ばれる)は、コーミングシリンダ10の周囲の部分領域にわたって延在するコーミングセグメント11の針布(Garnitur)によってコーミングされる。コーミングシリンダ10は、軸13を介して機械フレームMSに回転可能に支承されていて、略示された駆動路14を介して伝動装置Gによって駆動される。
【0029】
伝動装置Gの駆動は、略示されたメインモータMによって行われ、このメインモータMは、ライン44を介して制御ユニットSTと接続されている。コーミングシリンダ10においてコーミングセグメント11の反対側には、デタッチングセグメント12が取り付けられており、このデタッチングセグメント12は、移動可能に支承されたデタッチングローラ15(二重矢印参照)と共働して、コーミングされた繊維タフトFBのデタッチングつまり引き抜きを行う。これについては後でさらに述べる。
【0030】
コーミングシリンダ10に隣接して、スクリーンドラム17が配置されており、このスクリーンドラム17は、例えば図2及び図3から分かるように、軸18を介して軸受19,20によって機械フレームMSに回転可能に支承されている。スクリーンドラム17の駆動は、駆動車A3(図3)を介して行われ、この駆動車A3は軸18に回動不能に固定されていて、略示された駆動路AEを介して伝動装置Gと駆動結合されている(図示せず)。
【0031】
スクリーンドラム17とコーミングシリンダ10との間には、旋回軸23を中心にして旋回可能なフラップ22が配置されており、このフラップ22は、位置に応じて、コーミングされた成分とデタッチされた繊維集合体とを相応に導くという働きを有している。これによって特に、コーミングされた材料(ノイル、ネップ、汚れ)がスクリーンドラム17の領域に達することが、回避されるようになっている。このフラップの機能については、例えばWO2008/011733A1に詳しく記載されている。
【0032】
同様に上記刊行物にはスクリーンドラムの相応な構成も開示されており、この場合スクリーンドラムの内部にはさらに、デタッチング過程及び継ぎ過程(Loetprozess)中における空気流を制御するために、開口を備えていて回転可能に支承された別のシリンダが設けられている。
【0033】
図示の実施形態ではしかしながら単純なスクリーンドラム17だけが示されており、このスクリーンドラム17の内室内には、定置のカバーエレメント28が配置されており、このカバーエレメント28は、スクリーンドラム17の特定領域、つまりスクリーンドラム17上に形成された繊維フリースVがスクリーンドラム17から取り除かれる領域を、覆っている。スクリーンドラム17の内室は、管路26を介して負圧源25と接続されており、この負圧源25を介してスクリーンドラム17の内部においては負圧が生ぜしめられる。
【0034】
スクリーンドラム17に対して軸平行に押圧ドラム30が回転可能に支承されており、この押圧ドラム30は例えばその自重で、スクリーンドラム17の周囲に載っている。この場合押圧ドラム30は、機械フレームMSにおける相応な案内においてスクリーンドラム17の周面に向かう方向で支承されていてよい。同様に次のような構成、すなわち押圧ドラムの支承装置が旋回アームに取り付けられていて、該旋回アームの旋回軸線がスクリーンドラム17の軸線に対して軸平行に延びていて、機械フレームMSに支承されているような構成も可能である。押圧ドラム30はスクリーンドラム17と一緒に、スクリーンドラム17と押圧ドラム30との間を通って案内される繊維フリースVのためのクランプ箇所31を形成している。このクランプ箇所31は、スクリーンドラム17の外周部Uの上で案内される繊維フリースVの幅Bにわたって延在している。押圧ドラム30は例えばその外周部にゴム被覆を備えていて、駆動されるスクリーンドラム17とフリースVとを介して摩擦によって回転運動させられる。
【0035】
搬送方向Fで見て、クランプ箇所31に接続してガイドエレメント33が取り付けられており、このガイドエレメント33を介して繊維フリースV(短く「フリース」と呼ぶ)は横方向にまとめられて、フリースホッパ39(短く「ホッパ」と呼ぶ)へと送られる。この際に面形状のフリースVは、スライバF1へとまとめられ、このスライバF1はさらなる圧縮のためにホッパ39に続いて、プレスローラ対Kのクランプ間隙KKを通して案内される(図4)。プレスローラ対は、以下の記載では、カレンダローラK1,K2を備えた「カレンダローラ対」と呼ばれる。
【0036】
ガイドエレメント33は下側のガイド面37を有しており、このガイド面37はスクリーンドラム17の周囲Uの部分領域にわたって延在しており、図3のA−A線における断面図(図4)に示されているように、スクリーンドラム17の周囲の形状に合わせられている。スクリーンドラム17の周囲Uとガイド面37との間には、ガイドエレメント33がスクリーンドラム17の周囲Uと接触して擦れないことを保証する小さな間隙だけが存在している。ガイドエレメント33は、図示されていない固定エレメントを介して、機械フレームMSと堅く結合されており、これによってスクリーンドラム17の周面Uに対して一定の位置に保たれる。
【0037】
ホッパ39に到るまでにまとめられる間にフリースVを横方向案内するために、ガイドエレメント33はサイドガイド34,35を備えており、これらのサイドガイド34,35は下側のガイド面37と結合されていて、この下側のガイド面37から、スクリーンドラム17の軸18に対して外方に向かって延びている。サイドガイド34,35は、ホッパへの引渡しまでのフリース縁部の「丸め込み」を助成するために、横断面で見て、円弧形状に形成されていてよい。クランプ箇所31を出た後でフリースVが最初に衝突するサイドガイド34は、円弧部R1を備えており、この円弧部R1は直線区分36へと移行しており、この直線区分36は、ホッパ39に到るまでに下降する角度αを成して延びている。向かい合って位置するサイドガイド35は、最初に直線区分38を有していて、この直線区分38はスクリーンドラム17の軸18に対して角度βを成しており、この直線区分38は円弧形状の区分R2において開口していて、この区分R2を介して第2のフリース縁部はホッパ39に供給される。サイドガイド35の横断面もまた円弧形状に形成されていてよい。
【0038】
図示の実施形態ではホッパ39、ガイド面37及びサイドガイド34,35は、1つの部材から、例えば1つのプラスチック射出成形部材から製造されている。ホッパ39は、下方に向かって延びるサイドガイド41,42を備えており、これらのサイドガイド41,42は、ホッパ39においてまとめられた繊維フリースを、後続のカレンダローラ対のクランプ箇所KKに到るまで横方向案内するために働く。
【0039】
図4aには図4の一区分が示されているが、この場合フリースVのためのガイド面37′は、図4におけるようにスクリーンドラム17の周囲の外側形状に合わせられているのではなく、スクリーンドラム17の接線Tgに対して角度δを成して延びていて、ホッパ39に開口している。ガイドエレメント33のガイド面37′の、図4aに示されたこのような経過もしくは形状もまた、「駆動されるローラ(17)の周面(U)の領域において延在する、定置のガイド手段」という請求項記載の概念に含まれている。
【0040】
請求項に記載されかつ例えば図3に示されるように、カレンダローラ対Kのうちの1つのカレンダローラK1は、相対回動不能にかつ同軸的にスクリーンドラム17に固定されていて、フリースVがクランプ箇所31への供給時に幅Bをもって延びている領域の外側に位置している。第2のカレンダローラK2は軸受L1を介して旋回アーム49に回転可能に支承されており、この旋回アーム49は旋回軸51を中心にして旋回可能に機械フレームMSに取り付けられている。
【0041】
旋回アーム49、ひいてはカレンダローラK2は、機械フレームMSに支持されたばね50によってカレンダローラK1に向かって押圧される。これによって圧力が、カレンダローラK1,K2のクランプ箇所KKにおける繊維材料に加えられ、この繊維材料をさらに圧縮し、これにより保持力を高めることができる。図示のばね50の代わりに、例えばベローズシリンダを使用することも可能である。
【0042】
カレンダローラK1に向かってのカレンダローラK2の旋回運動は、相応なリミットストッパ(図示せず)を設けることによって制限することができ、これにより、カレンダローラK1におけるカレンダローラK2の完全な接触を回避することができる。
【0043】
旋回アーム49の運動は、機械フレームMSに不動に取り付けられたセンサ47によって監視され、このセンサ47の信号はライン48を介して中央の制御ユニットSTに伝達される。そして信号は制御ユニットSTにおいて、内蔵されたプログラムを用いて評価される。旋回アーム49の旋回運動を感知することによって、カレンダローラK2の運動が検出され、この運動は、クランプ箇所KKを通って案内される繊維材料の質量変動によって生ぜしめられる。これによって質量経過をCV値として求めて、示すことができる。表示は例えば、制御ユニットSTと接続された表示装置AZ(例えばディスプレイ)において行うことができる。求められたCV値が所定の許容限界値の外で移動する場合には、制御ユニットSTを介して付加的な警告灯を作動させて、相応なコーミング箇所を停止することができる。カレンダローラK2の駆動は、駆動車A1とベルトZR(例えば歯付きベルト)を介して駆動結合されている駆動車A2を介して行われる。ベルトZRは、カレンダローラK1,K2の軸の間における運動を補償するために、図示されていないテンション装置によって緊張させられる。歯車伝動装置を使用することも可能である。駆動車A2は、カレンダローラK2が堅く結合されている軸29に回動不能に固定されている。軸29は図示のように、旋回アーム49に配置された軸受箇所L1に支承されている。駆動車A1は、スクリーンドラム17の軸18に固定されており、この軸18は同時に、カレンダローラK1がスクリーンドラム17に対して同軸的にかつ該スクリーンドラム17に堅く結合されていることに基づいて、カレンダローラK1の駆動軸でもある。これによってカレンダローラK1のための付加的な軸が節約され、スクリーンドラム17とカレンダローラK1との間における絶対的な同期が保証される。スクリーンドラム17の軸18は、軸受19,20を介して機械フレームMSに回転可能に支承されている。さらに軸18には別の駆動車A3が回動不能に固定されており、この駆動車A3は、略示された駆動エレメントAEを介して伝動装置Gと駆動結合されている。さらに可能な別の実施形態では、カレンダローラK2は、図示のように直にベルト伝動装置A1,A2,ZRを介して、駆動される軸18によってアクティブに駆動されるのではなく、ばね負荷装置(50)の作用下で摩擦により、駆動されるカレンダローラK1によって回転運動させられる。
【0044】
図4bの拡大図では、カレンダローラK2を駆動するためのさらに別の実施形態が示されている。カレンダローラK1,K2は外周部に正弦波の成形部54,55を備えており、これらの成形部54,55は図示の運転位置において、繊維材料の通過する領域において、互いに歯車のように噛み合っている。このように両方の成形部54,55が形状結合式に互いに係合していることによって、軸18を中心にして自由回転可能に支承されたカレンダローラK2は、伝動装置Gと駆動結合されているカレンダローラK1によって駆動される。つまりこの実施形態では、図3に示した実施形態におけるように、カレンダローラK2のための特別な駆動エレメントは不要である。貫通案内される繊維材料に対する成形部の作用によって、さらに、カレンダローラ対Kによって送り出されるスライバF1の固着力がさらに高められる。
【0045】
図示された装置の作用について以下に詳しく記載する:
図1に示した位置において、ニッパZは閉鎖されていて、後方位置を占めている。ニッパZのクランプ箇所KSから進出している繊維タフトFBは、コーミングシリンダ10に設けられた係合するコーミングセグメント11によってコーミングされる。フラップ22は、後続のスクリーンドラム17の外周部Uの近傍に位置しているので、コーミングされた成分(ノイル)は下方に向かって、図示されていない吸込み通路内に排出される。コーミング過程の後で、ニッパZは前方位置に移動し、今や、デタッチングローラ15に対して僅かな間隔をもって位置し、このデタッチングローラ15はその間にコーミングシリンダ10の軸13に向かって移動させられて、デタッチングセグメント12と一緒にクランプ箇所を形成する。
【0046】
デタッチングセグメント12は、コーミングシリンダ10の回転運動によって、ニッパZの前進運動中に、デタッチングローラ15の下における領域へと移動させられている。
【0047】
今や開放されたニッパZから進出している、コーミングされた繊維タフトFBの端部は、デタッチングセグメント12と上に位置するデタッチングローラ15との間におけるクランプ箇所によって把持され、これによって、この際に把持された繊維は繊維タフトFBの端部から、引き抜かれるつまり「デタッチされる」。このデタッチング過程時に生じる繊維集合体は、スクリーンドラム17において加えられた負圧の影響下で、既にスクリーンドラム17の外周部Uに載っているフリースVの端部へと載置され、重ねられる(継ぎ過程)。しかしながらスクリーンドラム17へのデタッチされた繊維集合体の引渡しが行われる前に、フラップ22は、引渡しを助成するために、旋回軸23を中心にしてコーミングシリンダ10に向かって移動させられている。この過程の詳しい説明は、例えばWO2008/011733A1に記載されている。スクリーンドラム17の上における領域のような引渡しの領域は、引渡し及び継ぎ過程のために必要な空気流を正確に制御できるようにするために、相応な仕切り板(図示せず)を備えていてよい。
【0048】
スクリーンドラム17は一定の速度で駆動され、フリースVを該スクリーンドラム17の外周部Uにおいて、押圧ドラム30とスクリーンドラム17との間のクランプ箇所31に移動させる。このクランプ箇所31を出た後でフリースVは、ガイドエレメント33の下側のガイド面37に達し、サイドガイド34に衝突する。このサイドガイド34においてフリースVは、円弧部R1の作用下で、直線区分36の斜めの配置形式(角度α)によってホッパ39へと引き渡される。サイドガイド34に向かい合って位置する側に配置された、直線区分38(角度β)と円弧部R2とを備えた別のサイドガイド35は、反対側に位置するフリース縁部をホッパ39に引き渡すことを助成する。ホッパ39に引き渡されたフリースは、これによってまとめられて圧縮され、ホッパを介して、後続の駆動されるカレンダローラ対K(K1,K2)のクランプ箇所KKに引き渡される。この引渡しは、ホッパ39に固定されたサイドガイド41,42によって助成される。これによって繊維材料は、該繊維材料がさらに圧縮されるクランプ箇所KKに達する前に、側方に逃げることが阻止される。既に述べたように、クランプ箇所KKを通して導かれる繊維材料の質量変動は、旋回運動可能に支承されたカレンダローラK2によって、旋回運動の感知によりセンサ47を介して検出し、かつ監視することができる。
【0049】
カレンダローラK1,K2から下方に向かって搬送方向FXに送り出されるスライバF1は、搬送テーブルTの上に達し、この搬送テーブルTを介してスライバF1は、隣接したコーミング箇所において製造されて送り出された別のスライバF2〜F6と一緒に、後続のドラフト装置ユニットに引き渡される。このドラフト装置ユニットに接続して、該ドラフト装置ユニットにおいて形成されたスライバをケンスに貯めるために、スライバ貯え装置が設けられていてよい。
【0050】
テーブルTは、駆動されるコンベヤ、例えばコンベヤベルトから成っている。搬送テーブルにおいて搬送されるスライバF1〜F6の数は、単に一例である。さらに多くの数のコーミング箇所(12箇所を上回る数)が、互いに並べて配置されていてもよく、このようになっていると、さらに多数のスライバが後続のドラフト装置に供給される。48箇所までの数の互いに並んで位置するコーミング箇所が可能である。
【0051】
提案された装置によって、コンパクトで単純な解決策が得られ、この場合付加的な支承装置及び駆動軸が回避され、誤ったドラフトのおそれが最小になる。本発明において提案された装置は特に、汎用のコーミング機械におけるよりも、まとめられるフリースの幅が僅かであるコーミング箇所であって、互いに並んで位置する多数(>10)のコーミング箇所を備えたコーミング機械のために有利である。
【特許請求の範囲】
【請求項1】
コーミング機械のコーミング箇所(1)において形成された繊維フリース(V)からスライバ(F1)を形成する装置であって、繊維フリース(V)がローラ対(17,30)のクランプ箇所(31)に供給され、該ローラ対(17,30)は、駆動装置に接続されたローラ(17)と押圧ローラ(30)とから成っていて、搬送方向(F)で見て繊維フリース(V)はクランプ箇所(31)の後ろでまとめられ、ホッパ(39)を介して、駆動装置(G,M)に接続されたプレスローラ対(K)に供給される形式のものにおいて、繊維フリース(V)は、搬送方向(F)で見て、ローラ対(17,30)のクランプ箇所(31)の後ろで、駆動されるローラ(17)の周面(U)の領域において、ホッパ(39)と後続のプレスローラ対(K)とに引き渡され、該プレスローラ対(K)の一方のプレスローラ(K1)が、駆動されるローラ(17)に回動不能にかつ同軸的に配置されていることを特徴とする、スライバを形成する装置。
【請求項2】
ローラ対(17,30)のクランプ箇所(31)とホッパとの間に、駆動されるローラ(17)の周面(U)の領域において延在する、繊維フリース(V)のための少なくとも1つの定置のガイド手段(33)が配置されている、請求項1記載の装置。
【請求項3】
ガイド手段(33)が少なくとも1つのサイドガイド(34)を有していて、該サイドガイド(34)は繊維フリース(V)の搬送路内に進入していて、駆動されるローラ(17)の回転軸(18)に対して鋭角(α)を成してホッパ(39)にまで延びている、請求項2記載の装置。
【請求項4】
ガイド手段(33)は下側のガイド面(37)を備えており、該ガイド面(37)は、駆動されるローラ(17)の周面(U)の領域において延びていて、繊維フリース(V)を下側面においてホッパ(39)への引渡し時に支持する、請求項3記載の装置。
【請求項5】
ホッパ(39)とガイド手段(33)とは互いに結合されている、請求項2から4までのいずれか1項記載の装置。
【請求項6】
ホッパ(39)とガイド手段(33)とは一体の成形部材として形成されている、請求項5記載の装置。
【請求項7】
ローラ(17)に固定されたプレスローラ(K1)は、ローラ(17)の一端部に固定されていて、該端部はクランプ箇所(31)の領域の外に位置している、請求項1から6までのいずれか1項記載の装置。
【請求項8】
ローラ(17)に固定されたプレスローラ(K1)と共にプレスローラ対(K)を形成する、回転可能に支承されたプレスローラ(K2)は、ローラ(17)に固定されたプレスローラ(K1)の回転軸(18)に対して横方向に可動に支承されていて、ばねエレメント(50)によって、ローラ(17)に固定されたプレスローラ(K1)に向かって押圧される、請求項1から6までのいずれか1項記載の装置。
【請求項9】
少なくとも1つのセンサ(47)が設けられていて、該センサ(47)は、可動に支承されたプレスローラ(K2)の運動を感知する、請求項8記載の装置。
【請求項10】
センサ(47)から制御ユニットに送られた、質量不均一性(CV値)を求めるための信号を評価するために、制御ユニット(ST)が設けられている、請求項9記載の装置。
【請求項11】
プレスローラ(K1,K2)はその外周面に歯車状の隆起部を備えていて、該隆起部はプレスローラの作業位置において形状結合式に互いに係合する、請求項8から10までのいずれか1項記載の装置。
【請求項12】
隆起部は、丸く面取りされた正弦波の形状を有している、請求項11記載の装置。
【請求項13】
ローラ対(17,30)の駆動されるローラ(17)は、負圧源(25)に接続されたスクリーンドラム(17)であり、該スクリーンドラム(17)には、繊維フリース(V)を形成するために、コーミング兼デタッチング装置(Z,10,15)によってコーミングされた繊維集合体が断続的に供給される、請求項1から4までのいずれか1項記載の装置。
【請求項14】
コーミング兼デタッチング装置(Z,10,15)がニッパユニット(Z)から成っていて、該ニッパユニット(Z)にコーミングシリンダ(10)が配属されていて、該コーミングシリンダ(10)がその外周面にコーミングセグメント(11)とデタッチングセグメント(12)とを備えており、該デタッチングセグメント(12)は、接近運動可能なデタッチングローラ(15)と共にクランプ箇所を形成する、請求項13記載の装置。
【請求項1】
コーミング機械のコーミング箇所(1)において形成された繊維フリース(V)からスライバ(F1)を形成する装置であって、繊維フリース(V)がローラ対(17,30)のクランプ箇所(31)に供給され、該ローラ対(17,30)は、駆動装置に接続されたローラ(17)と押圧ローラ(30)とから成っていて、搬送方向(F)で見て繊維フリース(V)はクランプ箇所(31)の後ろでまとめられ、ホッパ(39)を介して、駆動装置(G,M)に接続されたプレスローラ対(K)に供給される形式のものにおいて、繊維フリース(V)は、搬送方向(F)で見て、ローラ対(17,30)のクランプ箇所(31)の後ろで、駆動されるローラ(17)の周面(U)の領域において、ホッパ(39)と後続のプレスローラ対(K)とに引き渡され、該プレスローラ対(K)の一方のプレスローラ(K1)が、駆動されるローラ(17)に回動不能にかつ同軸的に配置されていることを特徴とする、スライバを形成する装置。
【請求項2】
ローラ対(17,30)のクランプ箇所(31)とホッパとの間に、駆動されるローラ(17)の周面(U)の領域において延在する、繊維フリース(V)のための少なくとも1つの定置のガイド手段(33)が配置されている、請求項1記載の装置。
【請求項3】
ガイド手段(33)が少なくとも1つのサイドガイド(34)を有していて、該サイドガイド(34)は繊維フリース(V)の搬送路内に進入していて、駆動されるローラ(17)の回転軸(18)に対して鋭角(α)を成してホッパ(39)にまで延びている、請求項2記載の装置。
【請求項4】
ガイド手段(33)は下側のガイド面(37)を備えており、該ガイド面(37)は、駆動されるローラ(17)の周面(U)の領域において延びていて、繊維フリース(V)を下側面においてホッパ(39)への引渡し時に支持する、請求項3記載の装置。
【請求項5】
ホッパ(39)とガイド手段(33)とは互いに結合されている、請求項2から4までのいずれか1項記載の装置。
【請求項6】
ホッパ(39)とガイド手段(33)とは一体の成形部材として形成されている、請求項5記載の装置。
【請求項7】
ローラ(17)に固定されたプレスローラ(K1)は、ローラ(17)の一端部に固定されていて、該端部はクランプ箇所(31)の領域の外に位置している、請求項1から6までのいずれか1項記載の装置。
【請求項8】
ローラ(17)に固定されたプレスローラ(K1)と共にプレスローラ対(K)を形成する、回転可能に支承されたプレスローラ(K2)は、ローラ(17)に固定されたプレスローラ(K1)の回転軸(18)に対して横方向に可動に支承されていて、ばねエレメント(50)によって、ローラ(17)に固定されたプレスローラ(K1)に向かって押圧される、請求項1から6までのいずれか1項記載の装置。
【請求項9】
少なくとも1つのセンサ(47)が設けられていて、該センサ(47)は、可動に支承されたプレスローラ(K2)の運動を感知する、請求項8記載の装置。
【請求項10】
センサ(47)から制御ユニットに送られた、質量不均一性(CV値)を求めるための信号を評価するために、制御ユニット(ST)が設けられている、請求項9記載の装置。
【請求項11】
プレスローラ(K1,K2)はその外周面に歯車状の隆起部を備えていて、該隆起部はプレスローラの作業位置において形状結合式に互いに係合する、請求項8から10までのいずれか1項記載の装置。
【請求項12】
隆起部は、丸く面取りされた正弦波の形状を有している、請求項11記載の装置。
【請求項13】
ローラ対(17,30)の駆動されるローラ(17)は、負圧源(25)に接続されたスクリーンドラム(17)であり、該スクリーンドラム(17)には、繊維フリース(V)を形成するために、コーミング兼デタッチング装置(Z,10,15)によってコーミングされた繊維集合体が断続的に供給される、請求項1から4までのいずれか1項記載の装置。
【請求項14】
コーミング兼デタッチング装置(Z,10,15)がニッパユニット(Z)から成っていて、該ニッパユニット(Z)にコーミングシリンダ(10)が配属されていて、該コーミングシリンダ(10)がその外周面にコーミングセグメント(11)とデタッチングセグメント(12)とを備えており、該デタッチングセグメント(12)は、接近運動可能なデタッチングローラ(15)と共にクランプ箇所を形成する、請求項13記載の装置。
【図1】

【図2】
【図3】
【図4】
【図4a】
【図4b】
【図2】
【図3】
【図4】
【図4a】
【図4b】
【公表番号】特表2012−532256(P2012−532256A)
【公表日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願番号】特願2012−518718(P2012−518718)
【出願日】平成22年7月6日(2010.7.6)
【国際出願番号】PCT/CH2010/000173
【国際公開番号】WO2011/003216
【国際公開日】平成23年1月13日(2011.1.13)
【出願人】(590005597)マシーネンファブリク リーター アクチェンゲゼルシャフト (93)
【氏名又は名称原語表記】Maschinenfabrik Rieter AG
【住所又は居所原語表記】Klosterstrasse 20,CH−8406 Winterthur,Switzerland
【Fターム(参考)】
【公表日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願日】平成22年7月6日(2010.7.6)
【国際出願番号】PCT/CH2010/000173
【国際公開番号】WO2011/003216
【国際公開日】平成23年1月13日(2011.1.13)
【出願人】(590005597)マシーネンファブリク リーター アクチェンゲゼルシャフト (93)
【氏名又は名称原語表記】Maschinenfabrik Rieter AG
【住所又は居所原語表記】Klosterstrasse 20,CH−8406 Winterthur,Switzerland
【Fターム(参考)】
[ Back to top ]