
スライバガイド手段を備えたコーミング機械
本発明は、互いに並んで配置された複数のコーミングヘッド(K1〜Kx)を備えたコーミング機械(KM)であって、個々のコーミングヘッドにおいて形成されたコーミングされた繊維フリース(V)が、設けられた手段(33,39)を介して1つのスライバ(F1)にまとめられ、プレスローラ対(K)に供給され、次いで搬送テーブル(T)上に排出され、該搬送テーブル(T)上においてスライバ(F1)は、隣接配置されたコーミングヘッドにおいて排出された他のスライバ(F2〜Fx)と一緒に互いに並んで配置され、1つのスライバ複合体(FV)として後続のドラフト装置(D)に供給される形式のものに関する。このような形式のコーミング機械において、従来の解決策を簡単化するため及び搬送テーブルへのスライバの自動的な供給を可能にするために、本発明の構成では、各プレスローラ対(K)と搬送テーブル(T)との間に、プレスローラ対(K)から排出されたスライバ(F1)のためのガイドエレメント(FE)が設けられている。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、互いに並んで配置された複数のコーミングヘッドを備えたコーミング機械であって、個々のコーミングヘッドにおいて形成されたコーミングされた繊維フリースが、設けられた手段を介して1つのスライバにまとめられ、プレスローラ対に供給され、次いで搬送テーブル上に排出され、該搬送テーブル上においてスライバは、隣接配置されたコーミングヘッドにおいて排出された他のスライバと一緒に互いに並んで配置され、1つのスライバ複合体として後続のドラフト装置に供給される形式のものに関する。
【0002】
従来技術(例えばDE102005001241A1)に基づいて公知のコーミング機械では、個々のコーミングヘッドにおいて形成された繊維フリースは、引出しテーブルと、この引出しテーブルに固定されたホッパとにおいて、1つのスライバにまとめられ、このスライバはさらなる圧縮のために後続のカレンダローラ対に供給される。カレンダローラ対から進出するスライバは、搬送テーブルに排出され、この搬送テーブルにおいてスライバは、変向ヘッド(Umlenkknopf)によって90°変向された後で、他のスライバと一緒に、さらなる処理のために後続のドラフト装置へと供給される。変向ヘッドは、個々のスライバの間における継ぎ箇所を移動させるために、通常調節可能であり、かつ偏心体を備えている。このような装置は、最大8つのコーミングヘッドを備えていて約8ktexでスライバを排出するコーミング機械において使用される。このような装置における欠点は、1つのコーミングヘッドにおける中断時、もしくはフリース形成の中断時に、障害を排除した後で、新たに形成されたスライバが、手によって搬送テーブルに、かつ変向ヘッドの周囲に案内されねばならないことであり、これによって初めて、新たに形成されたスライバをスライバの進出している端部と再び手によって結合することができる。さらに、搬送テーブル上における正確な位置決めのためには各スライバのためにそれぞれ固有の変向ヘッドが必要である。
【0003】
特に、互いに並んで作動する多数のコーミングヘッド(例えば24〜36のコーミングヘッド)を備えていて、著しく小さなスライバ重量を有するスライバを生ぜしめるコーミング機械では、公知の装置はもはや許容不能であり、かつ操作員にとって極めて手間が掛かる。このようなコーミング機械では、例えば、質量変動を排除すべく調整する調整装置を備えて設計された後続のドラフト装置を使用することによって、1つのコーミングヘッドのスライバの欠損を短時間補償することができる。
【0004】
この場合、短時間停止したコーミングヘッドの作動開始後に、新たに形成されたスライバが自動的にかつ、搬送テーブル上に位置する他のスライバに対して位置正確に供給されると、有利である。このことはしかしながら、従来公知の装置によっては不可能である。特に、スライバを高速で後続の搬送テーブルに排出することが望ましい場合には、カレンダローラから搬送テーブルへのスライバの、従来公知の自由な引渡し形式には、限界があり、位置正確な排出はもはや不可能である。
【0005】
ゆえに本発明の課題は、カレンダローラから搬送テーブルに排出されるスライバを引き渡すための公知の装置を改良すること、並びに、供給速度が高い場合でも搬送テーブルへのスライバの自動的でかつ位置正確な引渡しを保証することである。
【0006】
この課題を解決するために本発明の構成では、冒頭に述べた形式のコーミング機械において、各プレスローラ対と搬送テーブルとの間に、プレスローラ対から排出されたスライバのためのガイドエレメントが設けられているようにした。
【0007】
この本発明によるガイドエレメントによって、カレンダローラからそれぞれ排出されたスライバを、規定された軌道において搬送テーブル上に排出するまで、正確に案内することが保証される。これによって、搬送テーブルへのスライバの自動的でかつ位置正確な供給を可能にすることができる。
【0008】
さらに本発明の別の態様では、ガイドエレメントの少なくとも一部が移動調節可能に設けられているもしくは形成されている。すなわち各ガイドエレメントは一方では、搬送テーブル上における規定された排出箇所を調節するために、全体として移動調節可能に設けられていてよい。しかしながらまた他方では、ガイドエレメントの一部だけが移動調節可能に形成されていて、該ガイドエレメントの一部の排出端部を相応に位置決めできるように、ガイドエレメントを形成することも可能である。このような移動調節可能なガイドエレメントによって、すべてのコーミングヘッドにおいて一様なガイドエレメントを設けることが可能になり、これらのガイドエレメントを用いて調節可能性により、搬送テーブル上におけるそれぞれ任意の排出ポジションを正確に調節することができる。排出部の正確な位置決めによって、相応に多数のスライバにおいて、互いに上下に位置する2つの層を備えたスライバ複合体を形成することも可能であり、このスライバ複合体は後続のドラフト装置にさらなる処理のために供給される。
【0009】
さらにこの装置は、1つのコーミングヘッドの短時間の故障後に、本発明による移動調節可能なガイドエレメントによって1つのスライバをスライバ複合体に、適性に、位置正確にかつ自動的に再供給することができる。
【0010】
場合によっては、後続のドラフト装置に対して最も僅かな間隔をおいて配置されたコーミングヘッドと、ドラフト装置から最も離れて位置するコーミングヘッドとは、位置固定のガイドエレメントを備えていてよい。
【0011】
本発明の別の態様では、移動調節可能なガイドエレメントは、搬送テーブルの表面の平面に対して平行に延びる一平面内において旋回可能に配置されている。すなわちガイドエレメントの排出端部は、搬送テーブル上において、搬送方向に対して垂直な一平面において旋回することができる。
【0012】
本発明の別の有利な態様では、ガイドエレメントは、少なくとも部分的に管状に形成されている。このように形成されていると、スライバをその引渡し経路において正確に搬送テーブルに導くことができる。
【0013】
本発明の別の態様では、ガイドエレメントは、少なくとも部分的に、片側において開放したガイド溝を備えている。このような装置によって、場合によっては生じる、閉鎖されたガイドの不都合な空気循環を回避することができる。
【0014】
スライバを特に引渡し箇所において正確に位置決めするため、及び不都合な逸れを阻止するために、本発明の別の態様では、ガイドエレメントのガイド溝の開放した側が、少なくともガイドエレメントの排出端部の領域において、少なくとも部分的にガイドによって覆われている。このように構成されていると、当該排出領域におけるスライバの強制案内が保証される。ガイドは例えば、スライバの周囲を取り囲むガイドエレメントとして形成されていてよい。
【0015】
また、管状のガイドエレメントの内部において空気が堰き止められることを回避するために、本発明の別の態様では、ガイドエレメントは開口を備えている。このように構成されていると、ガイド管内において堰き止められた空気は逃げることができ、スライバの搬送を妨げられることなく続けることができる。
【0016】
特に、スライバを自動的に補充するため、及びガイド管の内部におけるスライバ搬送を促進するために、本発明の別の態様では、管状のガイドエレメントは、圧力空気供給のために働くインジェクタと接続されている。すなわちガイド管には管(インジェクタ)が開口していて、この管を介して圧力空気が圧力空気源からガイド管内に、該ガイド管の流出開口に向かって吹き込まれる。
【0017】
本発明の別の有利な態様では、ガイドエレメントの調節されたポジションを固定するために、固定手段が設けられている。これによってガイドエレメントの調節された位置をそのポジションにおいて固定することが保証される。
【0018】
本発明のさらに別の態様では、管状のガイドエレメントは少なくとも1つの屈曲部を備えている。このように構成されていると、スライバ複合体へのスライバの供給方向を相応に方向付けることができる。
【0019】
本発明の別の有利な態様では、2つの屈曲部が設けられていて、ガイドエレメントの排出開口は搬送テーブルの表面に向けられている。供給されるスライバを損傷なしに優しく搬送テーブル上に排出するため、もしくは損傷なしに優しく搬送テーブル上のスライバ複合体にもたらすために、本発明の別の態様では、ガイドエレメントの、排出開口を有する端部は、搬送テーブルの搬送方向で見て、該搬送テーブルとの間に鋭角を成している。所望のように優しく供給することによって、排出領域におけるスライバの損傷及び圧縮が回避される。
【0020】
搬送テーブルは、駆動されるコンベヤベルトから形成されていてよい。
【0021】
本発明の別の態様では、ガイドエレメントの排出端部は旋回可能に形成されている。すなわちガイドエレメントの最大部分は機械フレームに堅く固定されていて、ガイドエレメントの端部だけが旋回可能に形成されており、このようになっていると、搬送テーブルへのスライバの排出を調節することができる。
【0022】
本発明のさらに別の態様では、コーミングヘッドのプレスローラ対の引渡し箇所は、搬送テーブルの上であって、搬送テーブル上のスライバの搬送方向に対して垂直な方向における、搬送テーブルの中心に、つまり搬送テーブルの幅方向における中心に、配置されている。ガイドエレメントへのカレンダローラの排出箇所を中心に配置することによって、ガイドエレメントの長さを制限することが可能である。それというのは、最初のコーミングヘッドと最後のコーミングヘッドの、搬送テーブルに対する各排出箇所からの間隔は、等しいからである。さらにこれによって、コーミング機械の構造をコンパクトにすることができる。
【0023】
次に図面を参照しながら本発明の実施の形態を説明する。
【図面の簡単な説明】
【0024】
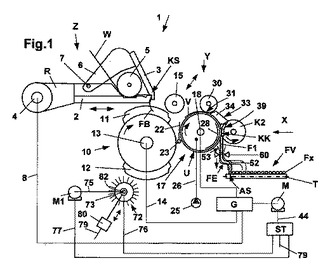
【図1】本発明のように設けられたガイドエレメントを備えた、コーミング機械のコーミングヘッドを示す側面図である。
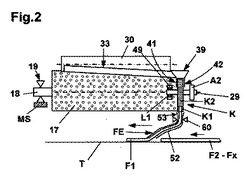
【図2】図1のXの方向から見た側面図である。
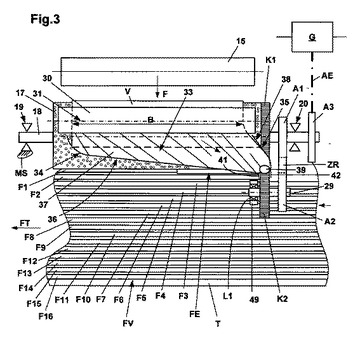
【図3】図1のYの方向から見た平面図である。
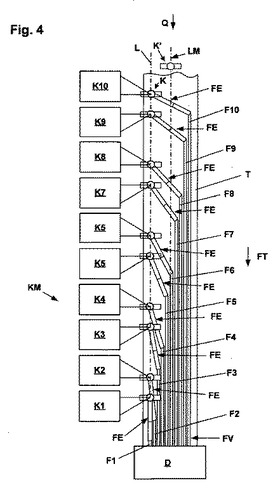
【図4】本発明によるガイドエレメントを備えたコーミング機械を示す平面図である。
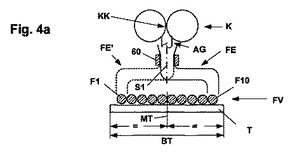
【図4a】図4のQの方向から見た図である。
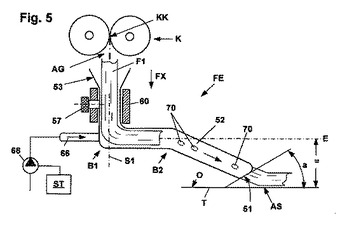
【図5】ガイドエレメントの1実施形態を示す図である。
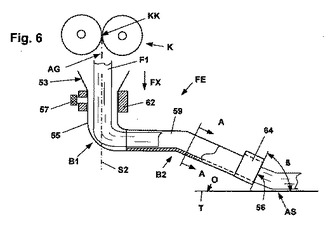
【図6】ガイドエレメントの別の実施形態を示す図である。
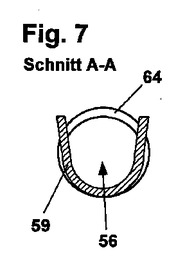
【図7】図6のA−A線に沿った断面図である。
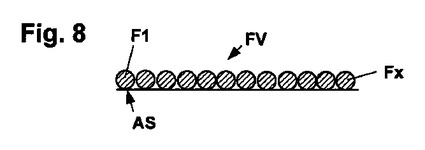
【図8】ガイドエレメントを介して搬送テーブル上に仮置きされたスライバから成るスライバ複合体を示す横断面図である。
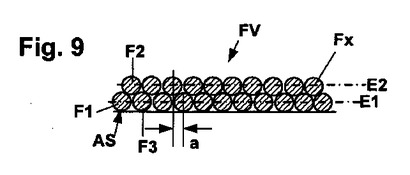
【図9】図8に示したスライバ複合体の別の形態を示す図である。
【0025】
図1には、コーミング箇所、例えばコーマとも呼ばれるコーミング機械のコーミングヘッドが概略的に側面図で示されており、この場合図面を見易くするために、ニッパユニットZ用の旋回アーム、コーミングシリンダ10をクリーニングするためのブラシローラ及び吸込み通路用の回路は、図示を省かれている。これらはしかしながら一般的に知られており、既に公開されている多くの刊行物から公知である。例えば図4から分かるように、通常、コーミング機械は互いに並んで位置する多数のコーミング箇所を有している。図4には、互いに並んで配置された10個のコーミングヘッドが例示されている。図3に示した実施形態では、テーブルTに載置されたスライバF1〜F16(Fx)の図示された数から分かるように、互いに並んで配置された16個のコーミングヘッドが示されている。各コーミングヘッドはそれぞれ1つの駆動ユニットを備えていることができ、これらの駆動ユニットは1つの中央の制御ユニットに接続されている。しかしながらまた、汎用のコーミング機械において公知であるように、複数のコーミングヘッドが一緒に相応な駆動手段を介して1つの中央の駆動装置によって駆動されるような実施形態も可能である。
【0026】
図1に示した実施形態では、これらのコーミング箇所のうちの1つが、側面図で示されており、以下に図1を参照してこの実施形態を説明する。
【0027】
ニッパユニットZを図示のように旋回可能に取り付ける代わりに、ニッパユニット(以下、単に「ニッパ」と呼ぶ)を定置に配置することも可能であり、この場合にはクランプ箇所KSを形成するために単に上側のニッパカッタ3だけが、位置固定のニッパプレート2に対して運動する。しかしながらこのことは本発明にとって重要なことではない。図示の実施形態では、往復振動するニッパZ(二重矢印参照)を前提とし、この場合振動運動のための駆動は、伝動装置Gから行われ、この伝動装置Gは略示された駆動路8を介してニッパZのフレームRの旋回軸4と接続されている。下側のニッパプレート2の上には、回転可能に支承された供給ローラ5が配置されており、この供給ローラ5は、図示されていない断続的に作動する駆動装置と接続されていて、ラップW(又はスライバ)をニッパのクランプ箇所KSに歩進的に供給するために働く。図示の実施形態ではニッパZは後方箇所に位置していて、閉鎖されている。ラップの、クランプ箇所KSを越えて進出している端部(繊維タフトFBと呼ばれる)は、コーミングシリンダ10の周囲の部分領域にわたって延在するコーミングセグメント11の針布(Garnitur)によってコーミングされる。コーミングシリンダ10は、軸13を介して機械フレームMSに回転可能に支承されていて、略示された駆動路14を介して伝動装置Gによって駆動される。
【0028】
伝動装置Gの駆動は、略示されたメインモータMによって行われ、このメインモータMは、ライン44を介して制御ユニットSTと接続されている。コーミングシリンダ10においてコーミングセグメント11の反対側には、デタッチングセグメント12が取り付けられており、このデタッチングセグメント12は、移動可能に支承されたデタッチングローラ15(二重矢印参照)と共働して、コーミングされた繊維タフトFBのデタッチングつまり引き抜きを行う。これについては後でさらに述べる。
【0029】
コーミングセグメント11を継続的にクリーニングするために、コーミングシリンダ10の下には、ブラシローラ72が軸73を介して、機械フレームMSにおける略示された軸受箇所82に回転可能に支承されている。ブラシローラの剛毛はコーミングセグメント11の通過時にコーミングセグメントの針布に進入する。ブラシローラ72の駆動は、別体のモータM1によって駆動結合部75を介して行われる。モータM1はライン77を介して制御ユニットSTと接続されている。軸73の出力もしくはトルクは例えば相応なセンサ(図示せず)を介して監視されることができる。剛毛の摩耗時には、ブラシローラ72を駆動するための、もたらされる駆動出力もしくはトルクが低下する。このことは前記センサ(図示せず)によって監視され、これらのセンサはその信号を、ライン76を介して制御ユニットSTに伝える。そして制御ユニットSTはライン79を介して調節装置80を制御し、この調節装置80を介してブラシローラ72の軸73の軸受箇所は、コーミングシリンダ10の軸13に対して半径方向で移動させられ(二重矢印)、この移動は、センサが再び軸73のトルクの所定値、つまり所定の許容範囲内にある値を知らせるまで、続けられる。軸73の軸受箇所はそのために機械フレームMSにおける案内(図示せず)において移動可能に支承されている。これによってブラシローラ72のクリーニング作用は自動的に維持されかつ制御される。
【0030】
コーミングシリンダ10に隣接して、スクリーンドラム17が配置されており、このスクリーンドラム17は、例えば図2及び図3から分かるように、軸18を介して軸受19,20によって機械フレームMSに回転可能に支承されている。スクリーンドラム17の駆動は、駆動車A3(図3)を介して行われ、この駆動車A3は軸18に回動不能に固定されていて、略示された駆動路AEを介して伝動装置Gと駆動結合されている。
【0031】
スクリーンドラム17とコーミングシリンダ10との間には、旋回軸23を中心にして旋回可能なフラップ22が配置されており、このフラップ22は、位置に応じて、コーミングされた成分とデタッチされた繊維集合体とを相応に導くという働きを有している。これによって特に、コーミングされた材料(ノイル、ネップ、汚れ)がスクリーンドラム17の領域に達することが、回避されるようになっている。このフラップの機能については、例えばWO2008/011733A1に詳しく記載されている。
【0032】
同様に上記刊行物にはスクリーンドラムの相応な構成も開示されており、この場合スクリーンドラムの内部にはさらに、デタッチング過程及び継ぎ過程(Loetprozess)中における空気流を制御するために、開口を備えていて回転可能に支承された別のシリンダが設けられている。
【0033】
図示の実施形態ではしかしながら単純なスクリーンドラム17だけが示されており、このスクリーンドラム17の内室内には、定置のカバーエレメント28が配置されており、このカバーエレメント28は、スクリーンドラム17の特定領域、つまりスクリーンドラム17上に形成された繊維フリースVがスクリーンドラム17から取り除かれる領域を、覆っている。スクリーンドラム17の内室は、管路26を介して負圧源25と接続されており、この負圧源25を介してスクリーンドラム17の内部においては負圧が生ぜしめられる。
【0034】
スクリーンドラム17に対して軸平行に押圧ドラム30が回転可能に支承されており、この押圧ドラム30は例えばその自重で、スクリーンドラム17の周囲に載っている。この場合押圧ドラム30は、機械フレームMSにおける相応な案内においてスクリーンドラム17の周面に向かう方向で支承されていてよい。同様に次のような構成、すなわち押圧ドラムの支承装置が旋回アームに取り付けられていて、該旋回アームの旋回軸線がスクリーンドラム17の軸線に対して軸平行に延びていて、機械フレームMSに支承されているような構成も可能である。押圧ドラム30はスクリーンドラム17と一緒に、スクリーンドラム17と押圧ドラム30との間を通って案内される繊維フリースVのためのクランプ箇所31を形成している。このクランプ箇所31は、スクリーンドラム17の外周部Uの上で案内される繊維フリースVの幅Bにわたって延在している。押圧ドラム30は例えばその外周部にゴム被覆を備えていて、駆動されるスクリーンドラム17とフリースVとを介して摩擦によって回転運動させられる。
【0035】
搬送方向Fで見て、クランプ箇所31に接続してガイドエレメント33が取り付けられており、このガイドエレメント33を介して繊維フリースV(短く「フリース」と呼ぶ)は横方向にまとめられて、フリースホッパ39(短く「ホッパ」と呼ぶ)へと送られる。この際に面形状のフリースVは、スライバF1へとまとめられ、このスライバF1はさらなる圧縮のためにホッパ39に続いて、プレスローラ対Kのクランプ間隙KKを通して案内される。プレスローラ対は、以下の記載では、カレンダローラK1,K2を備えた「カレンダローラ対K」と呼ばれる。
【0036】
ガイドエレメント33は下側のガイド面37を有しており、このガイド面37はスクリーンドラム17の周囲Uの部分領域にわたって延在しており、スクリーンドラム17の周囲の形状に合わせられている。スクリーンドラム17の周囲Uとガイド面37との間には、ガイドエレメント33がスクリーンドラム17の周囲Uと接触して擦れないことを保証する小さな間隙だけが存在している。ガイドエレメント33は、図示されていない固定エレメントを介して、機械フレームMSと堅く結合されており、これによってスクリーンドラム17の周面Uに対して一定の位置に保たれる。
【0037】
ホッパ39に到るまでにまとめられる間にフリースVを横方向案内するために、ガイドエレメント33はサイドガイド34,35を備えており、これらのサイドガイド34,35は下側のガイド面37と結合されていて、この下側のガイド面37から、スクリーンドラム17の軸18に対して外方に向かって延びている。
【0038】
ホッパ39とガイドエレメント33とは、1つの部材から製造されていることができ、この場合ホッパ39は、下方に向かって延びるサイドガイド41,42を備えている。これらのサイドガイド41,42は、ホッパ39においてまとめられた繊維フリースを、後続のカレンダローラ対Kのクランプ箇所KKに到るまで横方向案内するために働く。
【0039】
図3に示すように、カレンダローラ対Kのうちの1つのカレンダローラK1は、相対回動不能にかつ同軸的にスクリーンドラム17に固定されていて、フリースVがクランプ箇所31への供給時に幅Bをもって延びている領域の外側に位置している。
【0040】
第2のカレンダローラK2は軸受L1を介して例えば旋回アーム49に回転可能に支承されており、この旋回アーム49は旋回軸(図示せず)を中心にして旋回可能に機械フレームMSに取り付けられている。
【0041】
旋回アーム49、ひいてはカレンダローラK2は、機械フレームMSに支持されたばねエレメント(図示せず)によってカレンダローラK1に向かって押圧される。これによって圧力が、カレンダローラK1,K2のクランプ箇所KKにおける繊維材料に加えられ、この繊維材料をさらに圧縮し、これにより保持力を高めることができる。
【0042】
カレンダローラK2の駆動は、駆動車A1とベルトZR(例えば歯付きベルト)を介して駆動結合されている駆動車A2を介して行われる。ベルトZRは、カレンダローラK1,K2の軸の間における運動を補償するために、図示されていないテンション装置によって緊張させられる。歯車伝動装置を使用することも可能である。
【0043】
駆動車A2は、カレンダローラK2と堅く結合されている軸29に回動不能に固定されている。軸29は図示のように、旋回アーム49に配置された軸受箇所L1に支承されている。駆動車A1は、スクリーンドラム17の軸18に固定されており、この軸18は同時に、カレンダローラK1がスクリーンドラム17に対して同軸的にかつ該スクリーンドラム17に堅く結合されていることに基づいて、カレンダローラK1の駆動軸でもある。
【0044】
スクリーンドラム17の軸18は、軸受19,20を介して機械フレームMSに回転可能に支承されている。さらに軸18には別の駆動車A3が回動不能に固定されており、この駆動車A3は、略示された駆動エレメントAEを介して伝動装置Gと駆動結合されている。
【0045】
図4の平面図と図5及び図6の実施形態から分かるように、カレンダローラ対Kに接続して、旋回可能に支承されたガイドエレメントFEが設けられており、これらのガイドエレメントFEを介して、各カレンダローラ対Kから送られたスライバ(例えばF1)が引き受けられて、後続の搬送テーブルTの上に位置決めされて供給される。各ガイドエレメントFEへのスライバF1の引渡しは、引渡し箇所AGにおいて行われる。搬送テーブルTはこの場合位置固定の滑り面から成っていても、又は例えば図1に略示されているように駆動されるコンベヤベルトから成っていてもよい。
【0046】
搬送テーブルTに供給されたスライバF1〜Fxは、互いに並んで位置するように1つのスライバ複合体(Faserbandverbund)として後続のドラフト装置(Streckwerk)に供給され、このドラフト装置においてスライバ複合体は延伸され、次いで1つのスライバにまとめられる。
【0047】
ドラフト装置においてまとめられたスライバは、次いで後続の、スライバ貯え装置(Bandablage)のホッパ車を介してケンス内に貯えられる。
【0048】
図5に示した実施形態から分かるように、ガイドエレメントFEは管52から成っており、この管52は2つの屈曲部B1,B2を備えている。管55は、カレンダローラKに対向して位置する端部に、ホッパ形状の端部部分(短く「ホッパ53」と呼ぶ)を有しており、このホッパ53によって、ガイドエレメントFE内へのスライバF1の導入が容易になる。ホッパ53の下において管55は、軸受60に支承され、これにより水平平面Eにおいて旋回軸線S1を中心にして搬送テーブルTの表面に対して平行に旋回可能に支承されている。この旋回によって、後続の搬送テーブルTにおける仮置き箇所ASを規定もしくは調節することができる。
【0049】
軸受60は機械フレームMSに固定されていて、固定ねじ57を備えており、この固定ねじ57によってガイドエレメントFEの管52は、調節された位置において固定することができる。搬送テーブルTの領域において終端する管52の端部には、出口開口51が設けられている。この出口開口51は搬送テーブルTの表面Oに対して鋭角αを成して延びることができる。
【0050】
管52の内部においてスライバF1の搬送を促進するため、及び特に、新たに補充されたスライバF1を管52内に自動的に引き込むために、軸受60の下において管66が開口しており、この管66は、制御ユニットSTによって制御される圧力空気源68と接続されている。管66(「インジェクタ」とも呼ぶ)を介して行われる、管52内への圧力空気の吹き込みによって、ホッパ53及び軸受60の領域においては管52内に負圧が発生し、これによって新たに追加供給されたスライバF1は自動的に管52内に引き込まれ、出口開口51に向かって搬送される。必要な場合には、管52の内部におけるスライバの搬送を促進するための圧力空気の供給は、全運転中にわたって維持されてよい。このようなことは特に、長いガイドエレメントFEが使用される場合に必要である。しかしながら多くの場合には、管66を介したこのような圧力空気流の付加的な供給は、自動的な挿通及び新たなスライバの案内促進のためにだけ使用される。
【0051】
スライバの補足的な案内が成功裏に終了するやいなや、圧力空気の供給は制御ユニットを介して再び中断される。通常運転時にスライバと一緒に運ばれた空気を逃がすために、破線で示したように開口70が管52の周囲に設けられていてよい。
【0052】
図6にはガイドエレメントFEの別の実施形態が示されており、この実施形態では、一端に同様にホッパ53を備えている第1の管状部分55が、機械フレームMSにおいて軸受62を介して水平平面において旋回軸線S2を中心にして旋回可能に支承されている。図5に示した実施形態におけるように、調節された位置を固定するためにねじ57が設けられている。屈曲部B1に接続して管55の一端には、上方に向かって開放していて屈曲部B2を備えた溝59が固定されている。後続の搬送テーブルTの側に位置している、溝59の端部には、リング64が設けられており、このリング64は搬送テーブルTの側に位置する出口開口56を備えている。この出口開口56は同様に、搬送テーブルTの表面Oに対して鋭角βを成して方向付けられていてよい。図7の断面線A−Aから特に分かるように、丸く閉鎖されたリング64によって、スライバは排出開口56の領域においては上方に向かって逃げることができず、ひいては正確なポジションASにおいて搬送テーブルTの上に排出されることが保証される。しかしながらまた、リング64が丸く閉じられているのではなく、例えばスリットを備えたリングとして形成されているような実施形態も可能である。ガイド溝の開口の領域におけるスリットを備えたリングによるカバーは、しかしながらスライバの逃げが阻止されるような大きさに選択されねばならない。
【0053】
ガイドエレメントFEが屈曲部B2の領域において片側において開放したガイド溝59を備えて形成されている場合には、場合によって付加的なガイドエレメント(図示せず)がガイドエレメントFEの屈曲部B2の領域に設けられていても有利である。このように構成されていると、この屈曲部の領域におけるスライバの強制案内を保証することができる。
【0054】
溝59の領域において、一緒に導かれた空気は上方に向かって流出する可能性を有しており、これにより空気が、ガイドエレメントFEの内部におけるスライバの搬送に対して不都合な影響を及ぼすことはもはや無くなる。特に、内部をスライバが搬送されねばならない丸く閉鎖された長い管では、一緒に導かれる空気によって、管の内部における繊維材料が閉塞してしまうことがある。
【0055】
例えば図示の実施形態(他の多くの実施形態も可能である)によって、個々のスライバF1〜Fxのために搬送テーブルTにおける正確な仮置き箇所ASを生ぜしめることができる。図4の平面図からも分かるように、カレンダローラ対Kの引渡し箇所はすべて同じ線L上に位置していることができ、これによって個々のコーミングヘッドはカレンダローラの配置形式に関して同様に形成することができる。搬送テーブルTにおける仮置き箇所ASは、個々のガイドエレメントの調節によって規定される。管52,55にマーキングを設けることも可能であり、これらのマーキングによって、軸受60,62もしくは機械フレームMSにおける別のマーキングとの関連において、相応なポジションを調節することができる。
【0056】
図4aには、図4の矢印Qの方向から見た変化実施形態が示されており、この変化実施形態では各カレンダローラ対K(図4における破線の図示K′参照)の引渡し箇所AGは、搬送テーブルTの中心線MTと合致する線LMに位置している。搬送テーブルTは幅BTを有していて、図示のように線LMはほぼこの幅BTを半割している。これによって個々のカレンダローラ対Kの引渡し箇所AGと、搬送テーブルTにおける第1のスライバF1の排出箇所ASとの間の間隔と、搬送テーブルTにおける最後のスライバF10(Fx)の排出箇所ASとの間の間隔とを、等しく保つことができる。これによりガイドエレメントFEの必要な長さを短く保つことができ、コンパクトな構造形式を得ることができる。
【0057】
図4aには例として、それぞれ軸線S1を中心にして旋回可能に配置された2つのガイドエレメントFE,FE′だけが示されている。
【0058】
ガイドエレメントの調節可能性によって、例えば図8及び図9に略示(図1における図示に相当)したように、搬送テーブルTにおけるスライバF1〜Fxの種々様々な仮置き形態を調節することができる。図8には従来汎用の形態が示されており、この場合には個々のスライバF1〜Fxは一平面において互いに隣接して並べられて搬送テーブルT上に置かれ、スライダ複合体として後続のドラフト装置へと搬送される。図9に示した別の実施形態では、スライバF1〜Fxは2つの平面E1,E2で搬送テーブルTの上に置かれている。この場合第2の平面E2のスライバは搬送方向FTに対して垂直にずれa(1つのスライバの直径)の分だけずらされて配置もしくは載置されている。本発明によるガイドエレメントを使用することによって、搬送テーブルTにおけるこのような多数の仮置き形態が可能になる。
【0059】
従って(図4に示した実施形態とは異なり)、密に隣接配置されたコーミングヘッドの仮置き箇所を、これらのコーミングヘッドから排出されたスライバが搬送テーブル上において近接して載置されないように、選択することも可能である。例えば一例として、コーミングヘッドK1のスライバと、コーミングヘッドK5,K12のスライバとが互いに近接して並ぶように載置することが可能である。すなわちこの装置によって場合によっては、個々のコーミングヘッドの繊維材料つまりスライバをより良好に混合することができる。互いに並んで位置するコーミングヘッドの幾何学形状及び数に応じて、幾何学的に一様なガイドエレメントを、すべてのコーミングヘッドにおいて使用することができる。さらにまた、例えば、ドラフト装置Dの一番近くに配置されたコーミングヘッドK1のスライバの供給を、固定のガイドエレメントを介して行うこと、及び残りのコーミングヘッドに調節可能なガイドエレメントを設けることが可能である。さらに別の実施形態も可能である。
【0060】
次に図示の装置の作用形式について詳しく述べる:
図1に示した位置において、ニッパZは閉鎖されていて、後方の位置を占めている。ニッパZのクランプ箇所KSから進出している繊維タフトFBは、コーミングシリンダ10の係合しているコーミングセグメント11によってコーミングされる。フラップ22は、後続のスクリーンドラム17の周囲Uの近傍に位置しているので、コーミングされた成分(ノイル)は下方に向かって、図示されていない吸込み通路内に排出される。コーミング過程の後でニッパZは前方位置へと移動し、デタッチングローラ15から僅かな間隔を有する位置に達し、デタッチングローラ15はその間にコーミングシリンダ10の軸線13に向かって移動していて、デタッチングセグメント12と共にクランプ箇所を形成している。
【0061】
デタッチングセグメント12は、コーミングシリンダ10の回転運動によってニッパZの前進運動中にデタッチングローラ15の下の領域へと移動している。
【0062】
コーミングされた繊維タフトFBの、いまや開放したニッパZから進出している端部は、デタッチングセグメント12とその上に位置するデタッチングローラ15との間におけるクランプ箇所によって捕捉され、これによってこの際に捕捉された繊維は繊維タフトFBの端部から引き出され、つまり「デタッチング」される。このデタッチング過程時に生じた繊維束は、スクリーンドラム17において作用する負圧の影響下で、既にスクリーンドラム17の周囲Uに載っているフリースVの端部に載せられて、重ねられる(継ぎ過程)。しかしながら、スクリーンドラム17へのデタッチングされた繊維束の引渡しが行われる前に、フラップ22は旋回軸23を中心にしてコーミングシリンダ10に向かって移動させられており、これによって引渡しを促進することができる。この過程の詳細は、例えばWO2008/011733A1に記載されている。例えばスクリーンドラム17の上側領域のような、引渡しの領域は、図示されていない相応な堰板(Verschalungen)を備えていてよく、このようになっていると、引渡し及び継ぎ過程のために必要な空気流を正確に制御することができる。
【0063】
スクリーンドラム17は一定の速度で駆動され、スクリーンドラム17の周囲Uに位置するフリースVを、該スクリーンドラム17と押圧ドラム30との間のクランプ箇所31へと移動させる。クランプ箇所31を通過した後でフリースVは、ガイドエレメント33の下側のガイド面37に達し、サイドガイド34に衝突する。このサイドガイド34においてフリースVは、直線区分36の斜めの配置形式によってホッパ39へと引き渡される。サイドガイド34に向かい合って位置する側に配置された、直線区分39を備えた別のサイドガイド35は、反対側に位置するフリース縁部をホッパ39に引き渡すことを促進する。ホッパ39に引き渡されたフリースは、これによってまとめられて圧縮され、ホッパを介して、後続の駆動されるカレンダローラ対K(K1,K2)のクランプ箇所KKに引き渡される。この引渡しは、ホッパ39に固定されたサイドガイド41,42によって促進される。これによって繊維材料は、該繊維材料がさらに圧縮されるクランプ箇所KKに達する前に、側方に逃げることが阻止される。
【0064】
カレンダローラK1,K2から下方に向かって搬送方向FXに送り出されるスライバF1は、旋回可能に配置されたガイドエレメントFEのホッパ53内に供給され、管52を介して規定の排出箇所ASにおいて、位置固定の又は駆動される搬送テーブルTの上に達する。この搬送テーブルTの上においてスライバF1は、隣接したコーミング箇所において製造されかつ排出された他のスライバF2〜Fxと一緒に、後続のドラフト装置Dへと引き渡される。このドラフト装置Dに接続して、該ドラフト装置において形成されたスライバをケンスに貯めるために、スライバ貯え装置(図示せず)が設けられていてよい。テーブルTは、駆動されるコンベヤ、例えばコンベヤベルトから成っている。図示の実施形態におけるよりもさらに多数のコーミングヘッドが互いに並んで設けられているような態様も可能である。また48箇所までの数の互いに並んで位置するコーミング箇所が可能である。
【0065】
特に、図5から分かるように、カレンダローラ対Kのクランプ箇所KKを通過した後でスライバF1をガイドエレメントFE内に最初に自動的に挿通するために、圧力空気接続部66が設けられている。スライバF1がクランプ箇所KKを通過するや否や、制御装置STを介して圧力空気源68が作動させられ、圧力空気源68は管66を介して圧力空気を排出開口51に向かって管52内に吹き込む。ホッパ53内及び管52内において管66の入口開口の上において発生する負圧によって、スライバF1の端部はガイドエレメントFEの管52内に引き込まれ、排出開口51に向かって搬送される。スライバF1の端部が搬送テーブルTの仮置き箇所ASに載置された後で、圧力空気供給は再び中断される。必要な場合には、管52の内部におけるスライバF1の搬送を促進するために、圧力空気供給は運転中にも減じられた圧力で維持されてよい。隣接配置されたコーミングヘッドのスライバの供給も相応に行われる。このようにして最初に搬送テーブルT上に排出されたスライバF1〜Fは、手動で又は駆動される搬送テーブルTを用いてスライバ複合体(図3及び図4参照)にまとめられ、後続のドラフト装置Dの入口ローラ対に、もしくは別の可能な搬送補助装置に供給される。この場合スライバの構造は搬送テーブルT上において監視され、場合によっては予め調節されたガイドエレメントFEの排出箇所ASが修正される。そのためには相応なガイドエレメントFEにおいてねじ57が弛められ、搬送テーブルT上へのガイドエレメントFEの排出箇所ASが、軸線S1を中心にした各ガイドエレメントの旋回によって修正される。選択されたガイドエレメントFEの管52の開口51が修正された位置に旋回させられた後で、この修正されたポジションはねじ57の引き締めによって固定される。コーミングヘッドにおける個々の修正を実施した後で、機械を運転のために始動させることができる。
【0066】
もちろん、図6に示したガイドエレメントFEの実施形態もまた、自動的な挿通を実施できるようにするために、図5に示した実施形態に相応して圧力空気供給装置68,66を備えることができる。特に、コーミングヘッドの故障時にスライバ複合体に、抜けたスライバを迅速に再供給するためには、圧力空気源68の作用下における自動式の供給を使用すると有利である。この場合コーミング機械の運転を中断する必要はない。スライバの欠如は、ドラフト装置Dにおける調整装置の使用によって、新たなスライバが補充されるまで補償されることができる。
【0067】
本発明によるガイドエレメントの使用によって、後続のドラフト装置Dに供給されるスライバ複合体を個々に形成すること、個々のスライバ複合体に影響を与えること及び場合によって個々のスライバ複合体を修正することが可能である。
【技術分野】
【0001】
本発明は、互いに並んで配置された複数のコーミングヘッドを備えたコーミング機械であって、個々のコーミングヘッドにおいて形成されたコーミングされた繊維フリースが、設けられた手段を介して1つのスライバにまとめられ、プレスローラ対に供給され、次いで搬送テーブル上に排出され、該搬送テーブル上においてスライバは、隣接配置されたコーミングヘッドにおいて排出された他のスライバと一緒に互いに並んで配置され、1つのスライバ複合体として後続のドラフト装置に供給される形式のものに関する。
【0002】
従来技術(例えばDE102005001241A1)に基づいて公知のコーミング機械では、個々のコーミングヘッドにおいて形成された繊維フリースは、引出しテーブルと、この引出しテーブルに固定されたホッパとにおいて、1つのスライバにまとめられ、このスライバはさらなる圧縮のために後続のカレンダローラ対に供給される。カレンダローラ対から進出するスライバは、搬送テーブルに排出され、この搬送テーブルにおいてスライバは、変向ヘッド(Umlenkknopf)によって90°変向された後で、他のスライバと一緒に、さらなる処理のために後続のドラフト装置へと供給される。変向ヘッドは、個々のスライバの間における継ぎ箇所を移動させるために、通常調節可能であり、かつ偏心体を備えている。このような装置は、最大8つのコーミングヘッドを備えていて約8ktexでスライバを排出するコーミング機械において使用される。このような装置における欠点は、1つのコーミングヘッドにおける中断時、もしくはフリース形成の中断時に、障害を排除した後で、新たに形成されたスライバが、手によって搬送テーブルに、かつ変向ヘッドの周囲に案内されねばならないことであり、これによって初めて、新たに形成されたスライバをスライバの進出している端部と再び手によって結合することができる。さらに、搬送テーブル上における正確な位置決めのためには各スライバのためにそれぞれ固有の変向ヘッドが必要である。
【0003】
特に、互いに並んで作動する多数のコーミングヘッド(例えば24〜36のコーミングヘッド)を備えていて、著しく小さなスライバ重量を有するスライバを生ぜしめるコーミング機械では、公知の装置はもはや許容不能であり、かつ操作員にとって極めて手間が掛かる。このようなコーミング機械では、例えば、質量変動を排除すべく調整する調整装置を備えて設計された後続のドラフト装置を使用することによって、1つのコーミングヘッドのスライバの欠損を短時間補償することができる。
【0004】
この場合、短時間停止したコーミングヘッドの作動開始後に、新たに形成されたスライバが自動的にかつ、搬送テーブル上に位置する他のスライバに対して位置正確に供給されると、有利である。このことはしかしながら、従来公知の装置によっては不可能である。特に、スライバを高速で後続の搬送テーブルに排出することが望ましい場合には、カレンダローラから搬送テーブルへのスライバの、従来公知の自由な引渡し形式には、限界があり、位置正確な排出はもはや不可能である。
【0005】
ゆえに本発明の課題は、カレンダローラから搬送テーブルに排出されるスライバを引き渡すための公知の装置を改良すること、並びに、供給速度が高い場合でも搬送テーブルへのスライバの自動的でかつ位置正確な引渡しを保証することである。
【0006】
この課題を解決するために本発明の構成では、冒頭に述べた形式のコーミング機械において、各プレスローラ対と搬送テーブルとの間に、プレスローラ対から排出されたスライバのためのガイドエレメントが設けられているようにした。
【0007】
この本発明によるガイドエレメントによって、カレンダローラからそれぞれ排出されたスライバを、規定された軌道において搬送テーブル上に排出するまで、正確に案内することが保証される。これによって、搬送テーブルへのスライバの自動的でかつ位置正確な供給を可能にすることができる。
【0008】
さらに本発明の別の態様では、ガイドエレメントの少なくとも一部が移動調節可能に設けられているもしくは形成されている。すなわち各ガイドエレメントは一方では、搬送テーブル上における規定された排出箇所を調節するために、全体として移動調節可能に設けられていてよい。しかしながらまた他方では、ガイドエレメントの一部だけが移動調節可能に形成されていて、該ガイドエレメントの一部の排出端部を相応に位置決めできるように、ガイドエレメントを形成することも可能である。このような移動調節可能なガイドエレメントによって、すべてのコーミングヘッドにおいて一様なガイドエレメントを設けることが可能になり、これらのガイドエレメントを用いて調節可能性により、搬送テーブル上におけるそれぞれ任意の排出ポジションを正確に調節することができる。排出部の正確な位置決めによって、相応に多数のスライバにおいて、互いに上下に位置する2つの層を備えたスライバ複合体を形成することも可能であり、このスライバ複合体は後続のドラフト装置にさらなる処理のために供給される。
【0009】
さらにこの装置は、1つのコーミングヘッドの短時間の故障後に、本発明による移動調節可能なガイドエレメントによって1つのスライバをスライバ複合体に、適性に、位置正確にかつ自動的に再供給することができる。
【0010】
場合によっては、後続のドラフト装置に対して最も僅かな間隔をおいて配置されたコーミングヘッドと、ドラフト装置から最も離れて位置するコーミングヘッドとは、位置固定のガイドエレメントを備えていてよい。
【0011】
本発明の別の態様では、移動調節可能なガイドエレメントは、搬送テーブルの表面の平面に対して平行に延びる一平面内において旋回可能に配置されている。すなわちガイドエレメントの排出端部は、搬送テーブル上において、搬送方向に対して垂直な一平面において旋回することができる。
【0012】
本発明の別の有利な態様では、ガイドエレメントは、少なくとも部分的に管状に形成されている。このように形成されていると、スライバをその引渡し経路において正確に搬送テーブルに導くことができる。
【0013】
本発明の別の態様では、ガイドエレメントは、少なくとも部分的に、片側において開放したガイド溝を備えている。このような装置によって、場合によっては生じる、閉鎖されたガイドの不都合な空気循環を回避することができる。
【0014】
スライバを特に引渡し箇所において正確に位置決めするため、及び不都合な逸れを阻止するために、本発明の別の態様では、ガイドエレメントのガイド溝の開放した側が、少なくともガイドエレメントの排出端部の領域において、少なくとも部分的にガイドによって覆われている。このように構成されていると、当該排出領域におけるスライバの強制案内が保証される。ガイドは例えば、スライバの周囲を取り囲むガイドエレメントとして形成されていてよい。
【0015】
また、管状のガイドエレメントの内部において空気が堰き止められることを回避するために、本発明の別の態様では、ガイドエレメントは開口を備えている。このように構成されていると、ガイド管内において堰き止められた空気は逃げることができ、スライバの搬送を妨げられることなく続けることができる。
【0016】
特に、スライバを自動的に補充するため、及びガイド管の内部におけるスライバ搬送を促進するために、本発明の別の態様では、管状のガイドエレメントは、圧力空気供給のために働くインジェクタと接続されている。すなわちガイド管には管(インジェクタ)が開口していて、この管を介して圧力空気が圧力空気源からガイド管内に、該ガイド管の流出開口に向かって吹き込まれる。
【0017】
本発明の別の有利な態様では、ガイドエレメントの調節されたポジションを固定するために、固定手段が設けられている。これによってガイドエレメントの調節された位置をそのポジションにおいて固定することが保証される。
【0018】
本発明のさらに別の態様では、管状のガイドエレメントは少なくとも1つの屈曲部を備えている。このように構成されていると、スライバ複合体へのスライバの供給方向を相応に方向付けることができる。
【0019】
本発明の別の有利な態様では、2つの屈曲部が設けられていて、ガイドエレメントの排出開口は搬送テーブルの表面に向けられている。供給されるスライバを損傷なしに優しく搬送テーブル上に排出するため、もしくは損傷なしに優しく搬送テーブル上のスライバ複合体にもたらすために、本発明の別の態様では、ガイドエレメントの、排出開口を有する端部は、搬送テーブルの搬送方向で見て、該搬送テーブルとの間に鋭角を成している。所望のように優しく供給することによって、排出領域におけるスライバの損傷及び圧縮が回避される。
【0020】
搬送テーブルは、駆動されるコンベヤベルトから形成されていてよい。
【0021】
本発明の別の態様では、ガイドエレメントの排出端部は旋回可能に形成されている。すなわちガイドエレメントの最大部分は機械フレームに堅く固定されていて、ガイドエレメントの端部だけが旋回可能に形成されており、このようになっていると、搬送テーブルへのスライバの排出を調節することができる。
【0022】
本発明のさらに別の態様では、コーミングヘッドのプレスローラ対の引渡し箇所は、搬送テーブルの上であって、搬送テーブル上のスライバの搬送方向に対して垂直な方向における、搬送テーブルの中心に、つまり搬送テーブルの幅方向における中心に、配置されている。ガイドエレメントへのカレンダローラの排出箇所を中心に配置することによって、ガイドエレメントの長さを制限することが可能である。それというのは、最初のコーミングヘッドと最後のコーミングヘッドの、搬送テーブルに対する各排出箇所からの間隔は、等しいからである。さらにこれによって、コーミング機械の構造をコンパクトにすることができる。
【0023】
次に図面を参照しながら本発明の実施の形態を説明する。
【図面の簡単な説明】
【0024】
【図1】本発明のように設けられたガイドエレメントを備えた、コーミング機械のコーミングヘッドを示す側面図である。
【図2】図1のXの方向から見た側面図である。
【図3】図1のYの方向から見た平面図である。
【図4】本発明によるガイドエレメントを備えたコーミング機械を示す平面図である。
【図4a】図4のQの方向から見た図である。
【図5】ガイドエレメントの1実施形態を示す図である。
【図6】ガイドエレメントの別の実施形態を示す図である。
【図7】図6のA−A線に沿った断面図である。
【図8】ガイドエレメントを介して搬送テーブル上に仮置きされたスライバから成るスライバ複合体を示す横断面図である。
【図9】図8に示したスライバ複合体の別の形態を示す図である。
【0025】
図1には、コーミング箇所、例えばコーマとも呼ばれるコーミング機械のコーミングヘッドが概略的に側面図で示されており、この場合図面を見易くするために、ニッパユニットZ用の旋回アーム、コーミングシリンダ10をクリーニングするためのブラシローラ及び吸込み通路用の回路は、図示を省かれている。これらはしかしながら一般的に知られており、既に公開されている多くの刊行物から公知である。例えば図4から分かるように、通常、コーミング機械は互いに並んで位置する多数のコーミング箇所を有している。図4には、互いに並んで配置された10個のコーミングヘッドが例示されている。図3に示した実施形態では、テーブルTに載置されたスライバF1〜F16(Fx)の図示された数から分かるように、互いに並んで配置された16個のコーミングヘッドが示されている。各コーミングヘッドはそれぞれ1つの駆動ユニットを備えていることができ、これらの駆動ユニットは1つの中央の制御ユニットに接続されている。しかしながらまた、汎用のコーミング機械において公知であるように、複数のコーミングヘッドが一緒に相応な駆動手段を介して1つの中央の駆動装置によって駆動されるような実施形態も可能である。
【0026】
図1に示した実施形態では、これらのコーミング箇所のうちの1つが、側面図で示されており、以下に図1を参照してこの実施形態を説明する。
【0027】
ニッパユニットZを図示のように旋回可能に取り付ける代わりに、ニッパユニット(以下、単に「ニッパ」と呼ぶ)を定置に配置することも可能であり、この場合にはクランプ箇所KSを形成するために単に上側のニッパカッタ3だけが、位置固定のニッパプレート2に対して運動する。しかしながらこのことは本発明にとって重要なことではない。図示の実施形態では、往復振動するニッパZ(二重矢印参照)を前提とし、この場合振動運動のための駆動は、伝動装置Gから行われ、この伝動装置Gは略示された駆動路8を介してニッパZのフレームRの旋回軸4と接続されている。下側のニッパプレート2の上には、回転可能に支承された供給ローラ5が配置されており、この供給ローラ5は、図示されていない断続的に作動する駆動装置と接続されていて、ラップW(又はスライバ)をニッパのクランプ箇所KSに歩進的に供給するために働く。図示の実施形態ではニッパZは後方箇所に位置していて、閉鎖されている。ラップの、クランプ箇所KSを越えて進出している端部(繊維タフトFBと呼ばれる)は、コーミングシリンダ10の周囲の部分領域にわたって延在するコーミングセグメント11の針布(Garnitur)によってコーミングされる。コーミングシリンダ10は、軸13を介して機械フレームMSに回転可能に支承されていて、略示された駆動路14を介して伝動装置Gによって駆動される。
【0028】
伝動装置Gの駆動は、略示されたメインモータMによって行われ、このメインモータMは、ライン44を介して制御ユニットSTと接続されている。コーミングシリンダ10においてコーミングセグメント11の反対側には、デタッチングセグメント12が取り付けられており、このデタッチングセグメント12は、移動可能に支承されたデタッチングローラ15(二重矢印参照)と共働して、コーミングされた繊維タフトFBのデタッチングつまり引き抜きを行う。これについては後でさらに述べる。
【0029】
コーミングセグメント11を継続的にクリーニングするために、コーミングシリンダ10の下には、ブラシローラ72が軸73を介して、機械フレームMSにおける略示された軸受箇所82に回転可能に支承されている。ブラシローラの剛毛はコーミングセグメント11の通過時にコーミングセグメントの針布に進入する。ブラシローラ72の駆動は、別体のモータM1によって駆動結合部75を介して行われる。モータM1はライン77を介して制御ユニットSTと接続されている。軸73の出力もしくはトルクは例えば相応なセンサ(図示せず)を介して監視されることができる。剛毛の摩耗時には、ブラシローラ72を駆動するための、もたらされる駆動出力もしくはトルクが低下する。このことは前記センサ(図示せず)によって監視され、これらのセンサはその信号を、ライン76を介して制御ユニットSTに伝える。そして制御ユニットSTはライン79を介して調節装置80を制御し、この調節装置80を介してブラシローラ72の軸73の軸受箇所は、コーミングシリンダ10の軸13に対して半径方向で移動させられ(二重矢印)、この移動は、センサが再び軸73のトルクの所定値、つまり所定の許容範囲内にある値を知らせるまで、続けられる。軸73の軸受箇所はそのために機械フレームMSにおける案内(図示せず)において移動可能に支承されている。これによってブラシローラ72のクリーニング作用は自動的に維持されかつ制御される。
【0030】
コーミングシリンダ10に隣接して、スクリーンドラム17が配置されており、このスクリーンドラム17は、例えば図2及び図3から分かるように、軸18を介して軸受19,20によって機械フレームMSに回転可能に支承されている。スクリーンドラム17の駆動は、駆動車A3(図3)を介して行われ、この駆動車A3は軸18に回動不能に固定されていて、略示された駆動路AEを介して伝動装置Gと駆動結合されている。
【0031】
スクリーンドラム17とコーミングシリンダ10との間には、旋回軸23を中心にして旋回可能なフラップ22が配置されており、このフラップ22は、位置に応じて、コーミングされた成分とデタッチされた繊維集合体とを相応に導くという働きを有している。これによって特に、コーミングされた材料(ノイル、ネップ、汚れ)がスクリーンドラム17の領域に達することが、回避されるようになっている。このフラップの機能については、例えばWO2008/011733A1に詳しく記載されている。
【0032】
同様に上記刊行物にはスクリーンドラムの相応な構成も開示されており、この場合スクリーンドラムの内部にはさらに、デタッチング過程及び継ぎ過程(Loetprozess)中における空気流を制御するために、開口を備えていて回転可能に支承された別のシリンダが設けられている。
【0033】
図示の実施形態ではしかしながら単純なスクリーンドラム17だけが示されており、このスクリーンドラム17の内室内には、定置のカバーエレメント28が配置されており、このカバーエレメント28は、スクリーンドラム17の特定領域、つまりスクリーンドラム17上に形成された繊維フリースVがスクリーンドラム17から取り除かれる領域を、覆っている。スクリーンドラム17の内室は、管路26を介して負圧源25と接続されており、この負圧源25を介してスクリーンドラム17の内部においては負圧が生ぜしめられる。
【0034】
スクリーンドラム17に対して軸平行に押圧ドラム30が回転可能に支承されており、この押圧ドラム30は例えばその自重で、スクリーンドラム17の周囲に載っている。この場合押圧ドラム30は、機械フレームMSにおける相応な案内においてスクリーンドラム17の周面に向かう方向で支承されていてよい。同様に次のような構成、すなわち押圧ドラムの支承装置が旋回アームに取り付けられていて、該旋回アームの旋回軸線がスクリーンドラム17の軸線に対して軸平行に延びていて、機械フレームMSに支承されているような構成も可能である。押圧ドラム30はスクリーンドラム17と一緒に、スクリーンドラム17と押圧ドラム30との間を通って案内される繊維フリースVのためのクランプ箇所31を形成している。このクランプ箇所31は、スクリーンドラム17の外周部Uの上で案内される繊維フリースVの幅Bにわたって延在している。押圧ドラム30は例えばその外周部にゴム被覆を備えていて、駆動されるスクリーンドラム17とフリースVとを介して摩擦によって回転運動させられる。
【0035】
搬送方向Fで見て、クランプ箇所31に接続してガイドエレメント33が取り付けられており、このガイドエレメント33を介して繊維フリースV(短く「フリース」と呼ぶ)は横方向にまとめられて、フリースホッパ39(短く「ホッパ」と呼ぶ)へと送られる。この際に面形状のフリースVは、スライバF1へとまとめられ、このスライバF1はさらなる圧縮のためにホッパ39に続いて、プレスローラ対Kのクランプ間隙KKを通して案内される。プレスローラ対は、以下の記載では、カレンダローラK1,K2を備えた「カレンダローラ対K」と呼ばれる。
【0036】
ガイドエレメント33は下側のガイド面37を有しており、このガイド面37はスクリーンドラム17の周囲Uの部分領域にわたって延在しており、スクリーンドラム17の周囲の形状に合わせられている。スクリーンドラム17の周囲Uとガイド面37との間には、ガイドエレメント33がスクリーンドラム17の周囲Uと接触して擦れないことを保証する小さな間隙だけが存在している。ガイドエレメント33は、図示されていない固定エレメントを介して、機械フレームMSと堅く結合されており、これによってスクリーンドラム17の周面Uに対して一定の位置に保たれる。
【0037】
ホッパ39に到るまでにまとめられる間にフリースVを横方向案内するために、ガイドエレメント33はサイドガイド34,35を備えており、これらのサイドガイド34,35は下側のガイド面37と結合されていて、この下側のガイド面37から、スクリーンドラム17の軸18に対して外方に向かって延びている。
【0038】
ホッパ39とガイドエレメント33とは、1つの部材から製造されていることができ、この場合ホッパ39は、下方に向かって延びるサイドガイド41,42を備えている。これらのサイドガイド41,42は、ホッパ39においてまとめられた繊維フリースを、後続のカレンダローラ対Kのクランプ箇所KKに到るまで横方向案内するために働く。
【0039】
図3に示すように、カレンダローラ対Kのうちの1つのカレンダローラK1は、相対回動不能にかつ同軸的にスクリーンドラム17に固定されていて、フリースVがクランプ箇所31への供給時に幅Bをもって延びている領域の外側に位置している。
【0040】
第2のカレンダローラK2は軸受L1を介して例えば旋回アーム49に回転可能に支承されており、この旋回アーム49は旋回軸(図示せず)を中心にして旋回可能に機械フレームMSに取り付けられている。
【0041】
旋回アーム49、ひいてはカレンダローラK2は、機械フレームMSに支持されたばねエレメント(図示せず)によってカレンダローラK1に向かって押圧される。これによって圧力が、カレンダローラK1,K2のクランプ箇所KKにおける繊維材料に加えられ、この繊維材料をさらに圧縮し、これにより保持力を高めることができる。
【0042】
カレンダローラK2の駆動は、駆動車A1とベルトZR(例えば歯付きベルト)を介して駆動結合されている駆動車A2を介して行われる。ベルトZRは、カレンダローラK1,K2の軸の間における運動を補償するために、図示されていないテンション装置によって緊張させられる。歯車伝動装置を使用することも可能である。
【0043】
駆動車A2は、カレンダローラK2と堅く結合されている軸29に回動不能に固定されている。軸29は図示のように、旋回アーム49に配置された軸受箇所L1に支承されている。駆動車A1は、スクリーンドラム17の軸18に固定されており、この軸18は同時に、カレンダローラK1がスクリーンドラム17に対して同軸的にかつ該スクリーンドラム17に堅く結合されていることに基づいて、カレンダローラK1の駆動軸でもある。
【0044】
スクリーンドラム17の軸18は、軸受19,20を介して機械フレームMSに回転可能に支承されている。さらに軸18には別の駆動車A3が回動不能に固定されており、この駆動車A3は、略示された駆動エレメントAEを介して伝動装置Gと駆動結合されている。
【0045】
図4の平面図と図5及び図6の実施形態から分かるように、カレンダローラ対Kに接続して、旋回可能に支承されたガイドエレメントFEが設けられており、これらのガイドエレメントFEを介して、各カレンダローラ対Kから送られたスライバ(例えばF1)が引き受けられて、後続の搬送テーブルTの上に位置決めされて供給される。各ガイドエレメントFEへのスライバF1の引渡しは、引渡し箇所AGにおいて行われる。搬送テーブルTはこの場合位置固定の滑り面から成っていても、又は例えば図1に略示されているように駆動されるコンベヤベルトから成っていてもよい。
【0046】
搬送テーブルTに供給されたスライバF1〜Fxは、互いに並んで位置するように1つのスライバ複合体(Faserbandverbund)として後続のドラフト装置(Streckwerk)に供給され、このドラフト装置においてスライバ複合体は延伸され、次いで1つのスライバにまとめられる。
【0047】
ドラフト装置においてまとめられたスライバは、次いで後続の、スライバ貯え装置(Bandablage)のホッパ車を介してケンス内に貯えられる。
【0048】
図5に示した実施形態から分かるように、ガイドエレメントFEは管52から成っており、この管52は2つの屈曲部B1,B2を備えている。管55は、カレンダローラKに対向して位置する端部に、ホッパ形状の端部部分(短く「ホッパ53」と呼ぶ)を有しており、このホッパ53によって、ガイドエレメントFE内へのスライバF1の導入が容易になる。ホッパ53の下において管55は、軸受60に支承され、これにより水平平面Eにおいて旋回軸線S1を中心にして搬送テーブルTの表面に対して平行に旋回可能に支承されている。この旋回によって、後続の搬送テーブルTにおける仮置き箇所ASを規定もしくは調節することができる。
【0049】
軸受60は機械フレームMSに固定されていて、固定ねじ57を備えており、この固定ねじ57によってガイドエレメントFEの管52は、調節された位置において固定することができる。搬送テーブルTの領域において終端する管52の端部には、出口開口51が設けられている。この出口開口51は搬送テーブルTの表面Oに対して鋭角αを成して延びることができる。
【0050】
管52の内部においてスライバF1の搬送を促進するため、及び特に、新たに補充されたスライバF1を管52内に自動的に引き込むために、軸受60の下において管66が開口しており、この管66は、制御ユニットSTによって制御される圧力空気源68と接続されている。管66(「インジェクタ」とも呼ぶ)を介して行われる、管52内への圧力空気の吹き込みによって、ホッパ53及び軸受60の領域においては管52内に負圧が発生し、これによって新たに追加供給されたスライバF1は自動的に管52内に引き込まれ、出口開口51に向かって搬送される。必要な場合には、管52の内部におけるスライバの搬送を促進するための圧力空気の供給は、全運転中にわたって維持されてよい。このようなことは特に、長いガイドエレメントFEが使用される場合に必要である。しかしながら多くの場合には、管66を介したこのような圧力空気流の付加的な供給は、自動的な挿通及び新たなスライバの案内促進のためにだけ使用される。
【0051】
スライバの補足的な案内が成功裏に終了するやいなや、圧力空気の供給は制御ユニットを介して再び中断される。通常運転時にスライバと一緒に運ばれた空気を逃がすために、破線で示したように開口70が管52の周囲に設けられていてよい。
【0052】
図6にはガイドエレメントFEの別の実施形態が示されており、この実施形態では、一端に同様にホッパ53を備えている第1の管状部分55が、機械フレームMSにおいて軸受62を介して水平平面において旋回軸線S2を中心にして旋回可能に支承されている。図5に示した実施形態におけるように、調節された位置を固定するためにねじ57が設けられている。屈曲部B1に接続して管55の一端には、上方に向かって開放していて屈曲部B2を備えた溝59が固定されている。後続の搬送テーブルTの側に位置している、溝59の端部には、リング64が設けられており、このリング64は搬送テーブルTの側に位置する出口開口56を備えている。この出口開口56は同様に、搬送テーブルTの表面Oに対して鋭角βを成して方向付けられていてよい。図7の断面線A−Aから特に分かるように、丸く閉鎖されたリング64によって、スライバは排出開口56の領域においては上方に向かって逃げることができず、ひいては正確なポジションASにおいて搬送テーブルTの上に排出されることが保証される。しかしながらまた、リング64が丸く閉じられているのではなく、例えばスリットを備えたリングとして形成されているような実施形態も可能である。ガイド溝の開口の領域におけるスリットを備えたリングによるカバーは、しかしながらスライバの逃げが阻止されるような大きさに選択されねばならない。
【0053】
ガイドエレメントFEが屈曲部B2の領域において片側において開放したガイド溝59を備えて形成されている場合には、場合によって付加的なガイドエレメント(図示せず)がガイドエレメントFEの屈曲部B2の領域に設けられていても有利である。このように構成されていると、この屈曲部の領域におけるスライバの強制案内を保証することができる。
【0054】
溝59の領域において、一緒に導かれた空気は上方に向かって流出する可能性を有しており、これにより空気が、ガイドエレメントFEの内部におけるスライバの搬送に対して不都合な影響を及ぼすことはもはや無くなる。特に、内部をスライバが搬送されねばならない丸く閉鎖された長い管では、一緒に導かれる空気によって、管の内部における繊維材料が閉塞してしまうことがある。
【0055】
例えば図示の実施形態(他の多くの実施形態も可能である)によって、個々のスライバF1〜Fxのために搬送テーブルTにおける正確な仮置き箇所ASを生ぜしめることができる。図4の平面図からも分かるように、カレンダローラ対Kの引渡し箇所はすべて同じ線L上に位置していることができ、これによって個々のコーミングヘッドはカレンダローラの配置形式に関して同様に形成することができる。搬送テーブルTにおける仮置き箇所ASは、個々のガイドエレメントの調節によって規定される。管52,55にマーキングを設けることも可能であり、これらのマーキングによって、軸受60,62もしくは機械フレームMSにおける別のマーキングとの関連において、相応なポジションを調節することができる。
【0056】
図4aには、図4の矢印Qの方向から見た変化実施形態が示されており、この変化実施形態では各カレンダローラ対K(図4における破線の図示K′参照)の引渡し箇所AGは、搬送テーブルTの中心線MTと合致する線LMに位置している。搬送テーブルTは幅BTを有していて、図示のように線LMはほぼこの幅BTを半割している。これによって個々のカレンダローラ対Kの引渡し箇所AGと、搬送テーブルTにおける第1のスライバF1の排出箇所ASとの間の間隔と、搬送テーブルTにおける最後のスライバF10(Fx)の排出箇所ASとの間の間隔とを、等しく保つことができる。これによりガイドエレメントFEの必要な長さを短く保つことができ、コンパクトな構造形式を得ることができる。
【0057】
図4aには例として、それぞれ軸線S1を中心にして旋回可能に配置された2つのガイドエレメントFE,FE′だけが示されている。
【0058】
ガイドエレメントの調節可能性によって、例えば図8及び図9に略示(図1における図示に相当)したように、搬送テーブルTにおけるスライバF1〜Fxの種々様々な仮置き形態を調節することができる。図8には従来汎用の形態が示されており、この場合には個々のスライバF1〜Fxは一平面において互いに隣接して並べられて搬送テーブルT上に置かれ、スライダ複合体として後続のドラフト装置へと搬送される。図9に示した別の実施形態では、スライバF1〜Fxは2つの平面E1,E2で搬送テーブルTの上に置かれている。この場合第2の平面E2のスライバは搬送方向FTに対して垂直にずれa(1つのスライバの直径)の分だけずらされて配置もしくは載置されている。本発明によるガイドエレメントを使用することによって、搬送テーブルTにおけるこのような多数の仮置き形態が可能になる。
【0059】
従って(図4に示した実施形態とは異なり)、密に隣接配置されたコーミングヘッドの仮置き箇所を、これらのコーミングヘッドから排出されたスライバが搬送テーブル上において近接して載置されないように、選択することも可能である。例えば一例として、コーミングヘッドK1のスライバと、コーミングヘッドK5,K12のスライバとが互いに近接して並ぶように載置することが可能である。すなわちこの装置によって場合によっては、個々のコーミングヘッドの繊維材料つまりスライバをより良好に混合することができる。互いに並んで位置するコーミングヘッドの幾何学形状及び数に応じて、幾何学的に一様なガイドエレメントを、すべてのコーミングヘッドにおいて使用することができる。さらにまた、例えば、ドラフト装置Dの一番近くに配置されたコーミングヘッドK1のスライバの供給を、固定のガイドエレメントを介して行うこと、及び残りのコーミングヘッドに調節可能なガイドエレメントを設けることが可能である。さらに別の実施形態も可能である。
【0060】
次に図示の装置の作用形式について詳しく述べる:
図1に示した位置において、ニッパZは閉鎖されていて、後方の位置を占めている。ニッパZのクランプ箇所KSから進出している繊維タフトFBは、コーミングシリンダ10の係合しているコーミングセグメント11によってコーミングされる。フラップ22は、後続のスクリーンドラム17の周囲Uの近傍に位置しているので、コーミングされた成分(ノイル)は下方に向かって、図示されていない吸込み通路内に排出される。コーミング過程の後でニッパZは前方位置へと移動し、デタッチングローラ15から僅かな間隔を有する位置に達し、デタッチングローラ15はその間にコーミングシリンダ10の軸線13に向かって移動していて、デタッチングセグメント12と共にクランプ箇所を形成している。
【0061】
デタッチングセグメント12は、コーミングシリンダ10の回転運動によってニッパZの前進運動中にデタッチングローラ15の下の領域へと移動している。
【0062】
コーミングされた繊維タフトFBの、いまや開放したニッパZから進出している端部は、デタッチングセグメント12とその上に位置するデタッチングローラ15との間におけるクランプ箇所によって捕捉され、これによってこの際に捕捉された繊維は繊維タフトFBの端部から引き出され、つまり「デタッチング」される。このデタッチング過程時に生じた繊維束は、スクリーンドラム17において作用する負圧の影響下で、既にスクリーンドラム17の周囲Uに載っているフリースVの端部に載せられて、重ねられる(継ぎ過程)。しかしながら、スクリーンドラム17へのデタッチングされた繊維束の引渡しが行われる前に、フラップ22は旋回軸23を中心にしてコーミングシリンダ10に向かって移動させられており、これによって引渡しを促進することができる。この過程の詳細は、例えばWO2008/011733A1に記載されている。例えばスクリーンドラム17の上側領域のような、引渡しの領域は、図示されていない相応な堰板(Verschalungen)を備えていてよく、このようになっていると、引渡し及び継ぎ過程のために必要な空気流を正確に制御することができる。
【0063】
スクリーンドラム17は一定の速度で駆動され、スクリーンドラム17の周囲Uに位置するフリースVを、該スクリーンドラム17と押圧ドラム30との間のクランプ箇所31へと移動させる。クランプ箇所31を通過した後でフリースVは、ガイドエレメント33の下側のガイド面37に達し、サイドガイド34に衝突する。このサイドガイド34においてフリースVは、直線区分36の斜めの配置形式によってホッパ39へと引き渡される。サイドガイド34に向かい合って位置する側に配置された、直線区分39を備えた別のサイドガイド35は、反対側に位置するフリース縁部をホッパ39に引き渡すことを促進する。ホッパ39に引き渡されたフリースは、これによってまとめられて圧縮され、ホッパを介して、後続の駆動されるカレンダローラ対K(K1,K2)のクランプ箇所KKに引き渡される。この引渡しは、ホッパ39に固定されたサイドガイド41,42によって促進される。これによって繊維材料は、該繊維材料がさらに圧縮されるクランプ箇所KKに達する前に、側方に逃げることが阻止される。
【0064】
カレンダローラK1,K2から下方に向かって搬送方向FXに送り出されるスライバF1は、旋回可能に配置されたガイドエレメントFEのホッパ53内に供給され、管52を介して規定の排出箇所ASにおいて、位置固定の又は駆動される搬送テーブルTの上に達する。この搬送テーブルTの上においてスライバF1は、隣接したコーミング箇所において製造されかつ排出された他のスライバF2〜Fxと一緒に、後続のドラフト装置Dへと引き渡される。このドラフト装置Dに接続して、該ドラフト装置において形成されたスライバをケンスに貯めるために、スライバ貯え装置(図示せず)が設けられていてよい。テーブルTは、駆動されるコンベヤ、例えばコンベヤベルトから成っている。図示の実施形態におけるよりもさらに多数のコーミングヘッドが互いに並んで設けられているような態様も可能である。また48箇所までの数の互いに並んで位置するコーミング箇所が可能である。
【0065】
特に、図5から分かるように、カレンダローラ対Kのクランプ箇所KKを通過した後でスライバF1をガイドエレメントFE内に最初に自動的に挿通するために、圧力空気接続部66が設けられている。スライバF1がクランプ箇所KKを通過するや否や、制御装置STを介して圧力空気源68が作動させられ、圧力空気源68は管66を介して圧力空気を排出開口51に向かって管52内に吹き込む。ホッパ53内及び管52内において管66の入口開口の上において発生する負圧によって、スライバF1の端部はガイドエレメントFEの管52内に引き込まれ、排出開口51に向かって搬送される。スライバF1の端部が搬送テーブルTの仮置き箇所ASに載置された後で、圧力空気供給は再び中断される。必要な場合には、管52の内部におけるスライバF1の搬送を促進するために、圧力空気供給は運転中にも減じられた圧力で維持されてよい。隣接配置されたコーミングヘッドのスライバの供給も相応に行われる。このようにして最初に搬送テーブルT上に排出されたスライバF1〜Fは、手動で又は駆動される搬送テーブルTを用いてスライバ複合体(図3及び図4参照)にまとめられ、後続のドラフト装置Dの入口ローラ対に、もしくは別の可能な搬送補助装置に供給される。この場合スライバの構造は搬送テーブルT上において監視され、場合によっては予め調節されたガイドエレメントFEの排出箇所ASが修正される。そのためには相応なガイドエレメントFEにおいてねじ57が弛められ、搬送テーブルT上へのガイドエレメントFEの排出箇所ASが、軸線S1を中心にした各ガイドエレメントの旋回によって修正される。選択されたガイドエレメントFEの管52の開口51が修正された位置に旋回させられた後で、この修正されたポジションはねじ57の引き締めによって固定される。コーミングヘッドにおける個々の修正を実施した後で、機械を運転のために始動させることができる。
【0066】
もちろん、図6に示したガイドエレメントFEの実施形態もまた、自動的な挿通を実施できるようにするために、図5に示した実施形態に相応して圧力空気供給装置68,66を備えることができる。特に、コーミングヘッドの故障時にスライバ複合体に、抜けたスライバを迅速に再供給するためには、圧力空気源68の作用下における自動式の供給を使用すると有利である。この場合コーミング機械の運転を中断する必要はない。スライバの欠如は、ドラフト装置Dにおける調整装置の使用によって、新たなスライバが補充されるまで補償されることができる。
【0067】
本発明によるガイドエレメントの使用によって、後続のドラフト装置Dに供給されるスライバ複合体を個々に形成すること、個々のスライバ複合体に影響を与えること及び場合によって個々のスライバ複合体を修正することが可能である。
【特許請求の範囲】
【請求項1】
互いに並んで配置された複数のコーミングヘッド(K1〜Kx)を備えたコーミング機械(KM)であって、個々のコーミングヘッドにおいて形成されたコーミングされた繊維フリース(V)が、設けられた手段(33,39)を介して1つのスライバ(F1)にまとめられ、プレスローラ対(K)に供給され、次いで搬送テーブル(T)上に排出され、該搬送テーブル(T)上においてスライバ(F1)は、隣接配置されたコーミングヘッドにおいて排出された他のスライバ(F2〜Fx)と一緒に互いに並んで配置され、1つのスライバ複合体(FV)として後続のドラフト装置(D)に供給される形式のものにおいて、
各プレスローラ対(K)と搬送テーブル(T)との間に、プレスローラ対(K)から排出されたスライバ(F1)のためのガイドエレメント(FE)が設けられていることを特徴とするコーミング機械。
【請求項2】
ガイドエレメント(FE)の少なくとも一部が移動調節可能に設けられているもしくは形成されている、請求項1記載のコーミング機械。
【請求項3】
移動調節可能なガイドエレメント(FE)は、搬送テーブル(T)の表面(O)の平面に対して平行に延びる一平面(E)内において旋回可能に配置されている、請求項2記載のコーミング機械。
【請求項4】
ガイドエレメント(FE)は、少なくとも部分的に管状に形成されている、請求項1から3までのいずれか1項記載のコーミング機械。
【請求項5】
ガイドエレメント(FE)は、少なくとも部分的に、片側において開放したガイド溝(59)を備えている、請求項1から3までのいずれか1項記載のコーミング機械。
【請求項6】
ガイドエレメント(FE)のガイド溝(59)の開放した側が、少なくともガイドエレメント(FE)の排出端部(51,56)の領域において、少なくとも部分的にガイド(64)によって覆われている、請求項5記載のコーミング機械。
【請求項7】
ガイドエレメント(FE)は開口(70)を備えている、請求項4記載のコーミング機械。
【請求項8】
管状のガイドエレメント(FE)は、圧力空気供給のために働くインジェクタ(66)と接続されている、請求項4記載のコーミング機械。
【請求項9】
ガイドエレメント(FE)の調節されたポジションを固定するために、固定手段(57)が設けられている、請求項2から3までのいずれか1項記載のコーミング機械。
【請求項10】
管状のガイドエレメント(FE)は少なくとも1つの屈曲部(B1,B2)を備えている、請求項4記載のコーミング機械。
【請求項11】
2つの屈曲部(B1,B2)が設けられていて、ガイドエレメント(FE)の排出開口(51,56)は搬送テーブル(T)の表面(O)に向けられている、請求項10記載のコーミング機械。
【請求項12】
ガイドエレメント(FE)の、排出開口(51,56)を有する端部は、搬送テーブル(T)の搬送方向(FT)で見て、該搬送テーブル(T)との間に鋭角(α,β)を成している、請求項10又は11記載のコーミング機械。
【請求項13】
搬送テーブル(T)は、駆動されるコンベヤベルトから形成されている、請求項1から12までのいずれか1項記載のコーミング機械。
【請求項14】
ガイドエレメント(FE)の排出端部は旋回可能に形成されている、請求項1記載のコーミング機械。
【請求項15】
コーミングヘッド(K1〜Kx)のプレスローラ対(K)の引渡し箇所(AG)は、搬送テーブル(T)の上であって、搬送テーブル上のスライバ(F1〜Fx)の搬送方向(FT)に対して垂直な方向における、搬送テーブル(T)の中心(線LM)に配置されている、請求項1から3までのいずれか1項記載のコーミング機械。
【請求項1】
互いに並んで配置された複数のコーミングヘッド(K1〜Kx)を備えたコーミング機械(KM)であって、個々のコーミングヘッドにおいて形成されたコーミングされた繊維フリース(V)が、設けられた手段(33,39)を介して1つのスライバ(F1)にまとめられ、プレスローラ対(K)に供給され、次いで搬送テーブル(T)上に排出され、該搬送テーブル(T)上においてスライバ(F1)は、隣接配置されたコーミングヘッドにおいて排出された他のスライバ(F2〜Fx)と一緒に互いに並んで配置され、1つのスライバ複合体(FV)として後続のドラフト装置(D)に供給される形式のものにおいて、
各プレスローラ対(K)と搬送テーブル(T)との間に、プレスローラ対(K)から排出されたスライバ(F1)のためのガイドエレメント(FE)が設けられていることを特徴とするコーミング機械。
【請求項2】
ガイドエレメント(FE)の少なくとも一部が移動調節可能に設けられているもしくは形成されている、請求項1記載のコーミング機械。
【請求項3】
移動調節可能なガイドエレメント(FE)は、搬送テーブル(T)の表面(O)の平面に対して平行に延びる一平面(E)内において旋回可能に配置されている、請求項2記載のコーミング機械。
【請求項4】
ガイドエレメント(FE)は、少なくとも部分的に管状に形成されている、請求項1から3までのいずれか1項記載のコーミング機械。
【請求項5】
ガイドエレメント(FE)は、少なくとも部分的に、片側において開放したガイド溝(59)を備えている、請求項1から3までのいずれか1項記載のコーミング機械。
【請求項6】
ガイドエレメント(FE)のガイド溝(59)の開放した側が、少なくともガイドエレメント(FE)の排出端部(51,56)の領域において、少なくとも部分的にガイド(64)によって覆われている、請求項5記載のコーミング機械。
【請求項7】
ガイドエレメント(FE)は開口(70)を備えている、請求項4記載のコーミング機械。
【請求項8】
管状のガイドエレメント(FE)は、圧力空気供給のために働くインジェクタ(66)と接続されている、請求項4記載のコーミング機械。
【請求項9】
ガイドエレメント(FE)の調節されたポジションを固定するために、固定手段(57)が設けられている、請求項2から3までのいずれか1項記載のコーミング機械。
【請求項10】
管状のガイドエレメント(FE)は少なくとも1つの屈曲部(B1,B2)を備えている、請求項4記載のコーミング機械。
【請求項11】
2つの屈曲部(B1,B2)が設けられていて、ガイドエレメント(FE)の排出開口(51,56)は搬送テーブル(T)の表面(O)に向けられている、請求項10記載のコーミング機械。
【請求項12】
ガイドエレメント(FE)の、排出開口(51,56)を有する端部は、搬送テーブル(T)の搬送方向(FT)で見て、該搬送テーブル(T)との間に鋭角(α,β)を成している、請求項10又は11記載のコーミング機械。
【請求項13】
搬送テーブル(T)は、駆動されるコンベヤベルトから形成されている、請求項1から12までのいずれか1項記載のコーミング機械。
【請求項14】
ガイドエレメント(FE)の排出端部は旋回可能に形成されている、請求項1記載のコーミング機械。
【請求項15】
コーミングヘッド(K1〜Kx)のプレスローラ対(K)の引渡し箇所(AG)は、搬送テーブル(T)の上であって、搬送テーブル上のスライバ(F1〜Fx)の搬送方向(FT)に対して垂直な方向における、搬送テーブル(T)の中心(線LM)に配置されている、請求項1から3までのいずれか1項記載のコーミング機械。
【図1】

【図2】
【図3】
【図4】
【図4a】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図4a】
【図5】
【図6】
【図7】
【図8】
【図9】
【公表番号】特表2013−507533(P2013−507533A)
【公表日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願番号】特願2012−532436(P2012−532436)
【出願日】平成22年10月4日(2010.10.4)
【国際出願番号】PCT/CH2010/000241
【国際公開番号】WO2011/041919
【国際公開日】平成23年4月14日(2011.4.14)
【出願人】(590005597)マシーネンファブリク リーター アクチェンゲゼルシャフト (93)
【氏名又は名称原語表記】Maschinenfabrik Rieter AG
【住所又は居所原語表記】Klosterstrasse 20,CH−8406 Winterthur,Switzerland
【Fターム(参考)】
【公表日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願日】平成22年10月4日(2010.10.4)
【国際出願番号】PCT/CH2010/000241
【国際公開番号】WO2011/041919
【国際公開日】平成23年4月14日(2011.4.14)
【出願人】(590005597)マシーネンファブリク リーター アクチェンゲゼルシャフト (93)
【氏名又は名称原語表記】Maschinenfabrik Rieter AG
【住所又は居所原語表記】Klosterstrasse 20,CH−8406 Winterthur,Switzerland
【Fターム(参考)】
[ Back to top ]