
スラスト力発生装置及び該スラスト力発生装置を適用した電磁機械
【課題】組み立て作業が簡単であり、部品点数の低減及び主軸長の短縮化を図ったスラスト力発生装置及び該スラスト力発生装置を適用した電磁機械を提供する。
【解決手段】永久磁石13の径方向寸法は、ベアリングレスモータ40、50の可動子4、6、及びセンサターゲット2、8と同じにすることで、回転体形状を凸型から円筒型に改良した。また、永久磁石13の外周部分をセンサターゲットとすることで、ベアリングレス回転機の軸長短縮化を可能にした。更に、主軸1の下側に永久磁石19、もしくは強磁性体を設置し、スラスト力発生の付加機構を設けることで、低消費電力化を可能にした。
【解決手段】永久磁石13の径方向寸法は、ベアリングレスモータ40、50の可動子4、6、及びセンサターゲット2、8と同じにすることで、回転体形状を凸型から円筒型に改良した。また、永久磁石13の外周部分をセンサターゲットとすることで、ベアリングレス回転機の軸長短縮化を可能にした。更に、主軸1の下側に永久磁石19、もしくは強磁性体を設置し、スラスト力発生の付加機構を設けることで、低消費電力化を可能にした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はスラスト力発生装置及び該スラスト力発生装置を適用した電磁機械に係わり、特に組み立て作業が簡単であり、部品点数の低減及び主軸長の短縮化を図ったスラスト力発生装置及び該スラスト力発生装置を適用した電磁機械に関する。
【背景技術】
【0002】
ベアリングレスモータは、主軸が磁気浮上しながら、非接触で回転が可能なモータである(例えば、非特許文献1参照)。一般的なモータでは、固定子に回転用の巻線(電動機巻線)が施されているが、ベアリングレスモータでは、更に、磁気浮上用の巻線(軸支持巻線)が追加で施されている。この軸支持巻線に電流を流すと、主軸の半径方向には磁気力が作用する。主軸の半径方向の変位を計測し、この磁気力を調整することで、非接触磁気浮上支持が可能になる。
【0003】
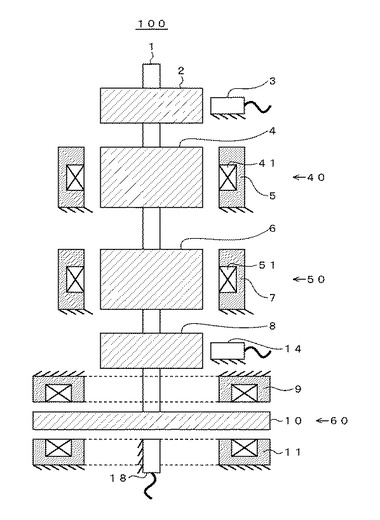
従来、このベアリングレスモータ2機と、スラスト磁気軸受を用いて、主軸の回転方向(θz)以外の5自由度運動(x、y、z、θx、θy)を磁気浮上制御するベアリングレス回転機が報告されている(例えば、非特許文献2参照)。このベアリングレス回転機100は、図5の断面図に示すように、可動子4と固定子5から構成されるベアリングレスモータユニット40、可動子6と固定子7から構成されるベアリングレスモータユニット50、及びスラスト磁気軸受60の3ユニット構造である。
【0004】
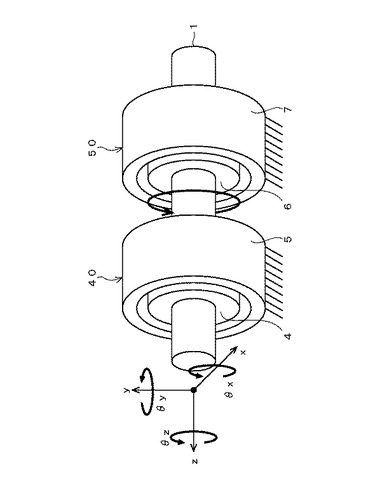
図6には、またベアリングレスモータユニット40及びベアリングレスモータユニット50回りの斜視構成図を示す。図5において、径方向変位センサ3はx軸とy軸用にそれぞれ配設され、図示しないハウジングに固定されており、主軸1に固定された円柱状のセンサターゲット2との間の距離を測定するようになっている。また、径方向変位センサ14も同様に、x軸とy軸用にそれぞれ配設され、回転軸1に固定された円柱状のセンサターゲット8との間の距離を測定するようになっている。
【0005】
一方、スラスト磁気軸受60は、円板状の磁性ディスク10と、それを挟む2個の固定子電磁石9及び11から構成される。主軸の軸方向運動(z)は、このスラスト磁気軸受により制御されるようになっている。また、軸方向変位センサ18は、磁性ディスク10をセンサターゲットとして、スラスト方向の変位を測定するようになっている。
【0006】
ベアリングレスモータ40、50の可動子4及び可動子6、センサターゲット2及びセンサターゲット8、磁性ディスク10は主軸1により貫通固定されている。この主軸1は、径の大きな磁性ディスク10が主軸1の下端部に固定されているため、回転体全体として凸型の形状を有する。また、変位センサは、1自由度を制御するために、少なくとも1個必要である。
【0007】
次に、図5に基づき磁気軸受の動作原理を説明する。図示しない制御装置は、径方向変位センサ3及び径方向変位センサ14により、半径方向(x、y)、及び、コニカル方向(θx、θy)の変位・角度を計測し、電磁石41、51に適切な電流を流すことで、主軸1の4自由度運動を能動的に制御する。
一方、軸方向については、主軸1に対し紙面上方向に外力が加わった場合、制御装置が電磁石11に電流を流し、磁性ディスク10を吸引することで、主軸1が移動しないように制御する。一方、主軸1に対し紙面下方向に外力が加わったら、制御装置が電磁石9に電流を流す。このときの電流とスラスト力の関係は非線形である。線形化するには、バイアス電流を流し、電磁石9と11の電流を、一方では増やし、他方で減らすプシュプル方式とする必要がある。
【0008】
現在、この5自由度制御型ベアリングレス回転機の図7に示すような産業用遠心ポンプへの応用が検討されている。
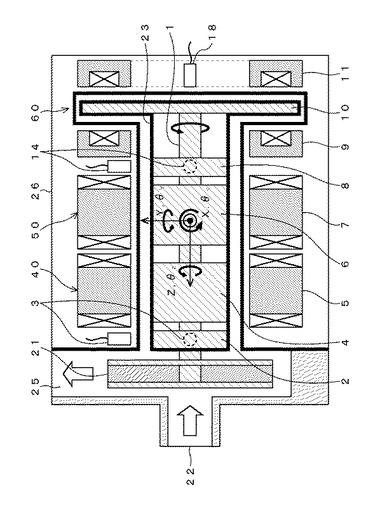
図7にこのポンプ用途向けの従来の5軸能動制御型ベアリングレスモータの全体構造図を示す。なお、図5と同一要素のものについては同一符号を付して説明は省略する。
【0009】
図7において、主軸1の左端には羽根車21が配設されており、ポンプ吸入口22より所定の流体が吸引され、ポンプ吐出口25よりこの流体が吐出されるようになっている。
前述したベアリングレスモータ40、50をポンプに適用した場合、主軸1の5自由度運動を能動的に制御しているため、ポンプ駆動中、主軸1に流体力が作用しても、安定して動作可能である。
【0010】
そして、また、主軸1と一体化した羽根車21を完全非接触で浮上回転させることができるため、シール(軸封)・軸受・潤滑油などが不要となり、メンテナンスフリーで発塵のないクリーンな液送が可能なポンプを実現できる。
しかし、この様な用途では、液体が固定子と可動子の間に流れ込むため、固定子・可動子表面を樹脂カバー等の隔壁23で覆う必要がある。
【0011】
なお、半径方向2自由度制御のベアリングレス回転機のみでポンプを構成した場合(例えば特許文献1や非特許文献3参照)、ポンプ駆動中のスラスト方向推進力により、羽根車21に力が作用し、羽根車21とハウジング26が衝突する恐れがある。
【0012】
【非特許文献1】A. Chibaら著,「Magnetic Bearings and Bearingless Drives」,Elsevier Newnes Press出版、2005年、p.12−34
【非特許文献2】朝間ら著,「ワイドギャップベアリングレスモータの磁気支持特性」,平成19年電気学会産業応用部門大会,III-157−162
【非特許文献3】M. Neffら著,「Bearingless centrifugal pump for highly pure chemicals」,ISMB-8,pp.283-287,2002
【特許文献1】特開2001−016887「電気式回転駆動装置」
【発明の開示】
【発明が解決しようとする課題】
【0013】
ところで、上記した従来のポンプでは、回転体が全体として凸型の形状を有することから、隔壁23の加工が複雑となったり、回転体をハウジング内部に挿入するのに、ハウジングを分離する等の必要があり、組み立て作業が煩雑である。このため、高コストで、生産性が悪くなる恐れがあった。
また、この様な可動子や固定子を覆う隔壁23には角部が多く形成されているため、クラックが入りやすく、機械強度が弱くなる恐れがあった。
【0014】
更に、磁性ディスク10の外周が大きいため、周速が早く、キャビテーションの発生する可能性が高かった。
更に、図5の断面図に示すように、径方向変位センサ14と、磁性体コアを有する電磁石9との距離が近い。この様な変位センサと鉄心の距離が近いと、渦電流型やインダクタンス型等の径方向変位センサ14を用いた場合、測定感度が低下する恐れがあった。
【0015】
本発明はこの様な従来の課題に鑑みてなされたもので、組み立て作業が簡単であり、部品点数の低減及び主軸長の短縮化を図ったスラスト力発生装置及び該スラスト力発生装置を適用した電磁機械を提供することを目的とする。
【課題を解決するための手段】
【0016】
このため本発明(請求項1)のスラスト力発生装置は、主軸に取り付けられた第1の永久磁石と、該第1の永久磁石の周囲でかつ該第1の永久磁石の重心より軸方向に所定距離ずれた位置に捲回された鉄心を有さない空心コイルとを備え、該空心コイルに電流を供給することにより、軸方向の電磁力を発生することを特徴とする。
【0017】
空心コイルに対し電流を流すと、ローレンツ力が空心コイルに作用する。空心コイルは固定されているため、その反作用を受け、第1の永久磁石にはローレンツ力とは逆方向に力が作用する。このことにより、空心コイルに適切な電流を流すことで、主軸のスラスト方向運動を能動的に制御することができる。
空心コイルには鉄心が無いため、径方向変位センサ等と距離を近く配設されても従来のように渦電流やインダクタンスの値が変化する等によりセンサの測定感度が低下することはなくなる。
【0018】
また、本発明(請求項2)のスラスト力発生装置は、前記空心コイルが、主軸正方向にずれた位置に配設された第1のコイルと、主軸負方向にずれた位置に該第1のコイルに対して対称的に配設された第2のコイルとを備え、該第2のコイル及び前記第1のコイルとがそれぞれ電流制御されることを特徴とする。
【0019】
第1のコイルと第2のコイルに対しそれぞれローレンツ力が発生するので、スラスト力を増大させることができる。
【0020】
更に、本発明(請求項3)のスラスト力発生装置は、前記第1の永久磁石の主軸方向端には支持板を備えて構成した。
【0021】
この支持板を金属で構成した場合、この金属板により、第1のコイル及び第2のコイルに対し磁束を集中させることができるようになる。このため、軸方向への発生力が増大可能となる。また、この金属板は、第1の永久磁石を主軸に対し取り付ける場合の、がたつきを抑える効果がある。なお、支持板は非金属で構成することも可能である。この場合であっても第1の永久磁石を主軸に対し取り付ける場合の、がたつきを抑える効果は同様に得ることができる。なお、金属板は、磁性体もしくは非磁性体であってもよい。
【0022】
更に、本発明(請求項4)の電磁機械は、請求項1〜3のいずれか1項に記載のスラスト力発生装置と、前記主軸に径方向の電磁力を発生する径方向力発生装置とを備え、前記第1の永久磁石の直径が、前記径方向力発生装置の固定子内側の直径以下に形成されたことを特徴とする。
【0023】
電磁機械は例えばベアリングレスモータや磁気軸受装置を備えたものである。径方向力発生装置は、主軸に対し径方向制御のみを行うものであってもよいし、回転駆動を伴うものであってもよい。
第1の永久磁石の直径が、径方向力発生装置の固定子内側の直径以下に形成されたことで、回転体全体として円筒形状になりハウジング内に回転体を挿入しやすくできる。このため、電磁機械を適用したポンプの組み立て作業が楽に行える。第1の永久磁石の直径は従来の磁性ディスクの寸法より小さいため、キャビテーションも生じ難い。
【0024】
更に、本発明(請求項5)の電磁機械は、前記第1の永久磁石の外周面、もしくは該外周面の表面に形成されたメッキ面、もしくは該外周面を被覆するリングの外周面のいずれかに対して径方向の変位を検出する径方向変位センサを備えて構成した。
【0025】
第1の永久磁石の外周をセンサターゲットとすることで、余分なセンサターゲットを排除し、軸長の短縮化が実現可能となる。
【0026】
更に、本発明(請求項6)の電磁機械は、前記第1の永久磁石の主軸方向端に対峙するように固定子側に別途第2の永久磁石が配設され、該第2の永久磁石が前記第1の永久磁石に対しスラスト方向に反発力、もしくは吸引力を発生することを特徴とする。
【0027】
第2の永久磁石が第1の永久磁石に対しスラスト方向に反発力、もしくは吸引力を発生することで例えばポンプ駆動中に羽根車に作用するスラスト力と平衡、もしくは一部をキャンセルして、空心コイルの電流を節約することができる。
【0028】
更に、本発明(請求項7)の電磁機械は、前記径方向力発生装置は、前記主軸を磁気浮上させつつ非接触で回転させるベアリングレスモータであることを特徴とする。
【発明の効果】
【0029】
以上説明したように本発明によれば、主軸に取り付けられた第1の永久磁石と、鉄心を有さない空心コイルとを備えて構成したので、空心コイルに電流を供給することにより、軸方向の電磁力を発生することができる。空心コイルに適切な電流を流すことで、主軸のスラスト方向運動を能動的に制御することができる。
【0030】
また、第1の永久磁石の直径を径方向力発生装置の固定子内側の直径以下に形成したので、回転体全体として円筒形状になりハウジング内に回転体を挿入しやすくできる。このため、電磁機械を適用したポンプの組み立て作業が楽に行える。第1の永久磁石の直径は従来の磁性ディスクの寸法より小さいため、キャビテーションも生じ難い。
以上により、生産性が良好でコンパクトな電磁機械が実現できる。具体的には、主軸長が20〜30%程度低減可能である。
【発明を実施するための最良の形態】
【0031】
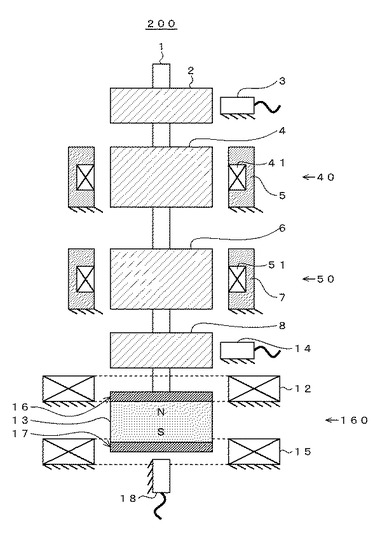
以下、本発明の実施形態について説明する。本発明の第1実施形態である5自由度制御型のベアリングレス回転機200の断面構成図を図1に示す。なお、図5と同一要素のものについては同一符号を付して説明は省略する。図1が従来の図5に示すベアリングレス回転機100の構成と異なるのは、従来のスラスト磁気軸受60部分が径の大きな磁性ディスク10を適用していたため回転体が全体として凸型の形状を有していたのに対し、第1実施形態のスラスト磁気軸受160の回転体部分が全体として円筒状に形成された点である。
【0032】
図1において、主軸1の下端部分には磁性体円板16、17により上下から挟まれた可動子となる円柱状の永久磁石13が取り付けられている。永久磁石13は、上面がN極、下面がS極に着磁されている。この永久磁石13の径方向寸法は、ベアリングレスモータ40、50の可動子4、6、及びセンサターゲット2、8と同じである。
【0033】
そして、この永久磁石13、磁性体円板16、17の外周であって、かつこの永久磁石の重心より所定距離高い位置には固定子となる空心コイル12が配設されている。空心コイル12は主軸1回りに捲回されているが、この空心コイル12には従来のように鉄心は配設されていない。そして、この空心コイル12はハウジング26を形成する樹脂により固定されている。
【0034】
一方、この空心コイル12と永久磁石の重心を隔てた重心より所定距離低い対称となる位置に空心コイル15が同様に配設されている。空心コイル12、15には、永久磁石13で発生した磁束が通過するようになっている。
【0035】
次に、本発明の第1実施形態の動作を説明する。
永久磁石13の径方向寸法をベアリングレスモータ40、50の可動子4、6、及びセンサターゲット2、8と同じにしたことで、回転体全体として円筒形状になりハウジング26内に回転体を挿入しやすくできる。このため、ポンプの組み立て作業が楽に行える。樹脂カバーとしての隔壁23も円筒状に形成できるため機械強度が増す。永久磁石13の径方向寸法は従来の磁性ディスク10の寸法より小さいため、キャビテーションも生じ難い。但し、この永久磁石13の径方向寸法は可動子4、6、及びセンサターゲット2、8の径方向寸法より小さくされてもよい。
【0036】
図1のスラスト磁気軸受160の動作原理を説明する。永久磁石13の上面のN極から発した磁束は空心コイル12に交差した後、空心コイル12及び空心コイル15の外側を通る。そして、空心コイル15を交差した後下面のS極に戻る。従って、空心コイル12には、永久磁石13のN極から出て半径方向外側に向かう磁束が通り、空心コイル15では、内側に向かってS極に流れ込む磁束が通る。
【0037】
空心コイル12に対し図中紙面手前側から奥方向に向けた電流を流し、一方、空心コイル15に対し図中紙面奥方向から手前側に向けた電流を流すと、ローレンツ力が空心コイル12、15の下方向に作用する。空心コイル12、15は固定されているため、その反作用を受け、永久磁石13には上方向の力が作用する。
【0038】
また、空心コイル12、15に対し上記とは逆方向に電流を流せば永久磁石13には下方向の力を作用することができる。従って、主軸1の軸方向変位を軸方向変位センサ18で計測し、空心コイル12、15に適切な電流を流すことで、主軸1のスラスト方向運動を能動的に制御することができる。
空心コイル12には鉄心が無いため、径方向変位センサ14と距離を近く配設されても従来のように渦電流やインダクタンスの値が変化する等によりセンサの測定感度が低下することはなくなる。
【0039】
このスラスト磁気軸受160は、可動子に永久磁石13を使用しているため、周辺の固定子に磁性体を使用しない。このため、主軸1が半径方向に変位しても、スラスト磁気軸受160による磁気吸引力が発生しない。従って、スラスト磁気軸受160がベアリングレスモータ40、50へ及ぼす影響を極小にできる。
【0040】
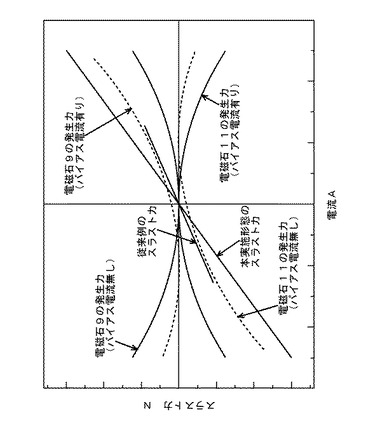
また、図4に、有限要素法による磁場解析結果を示す。横軸はコイルを流れる電流、縦軸はスラスト方向の発生力である。図4に示すように、図5の構成による従来のスラスト磁気軸受60では、電流とスラスト力の関係は非線形である。線形化するためには、バイアス電流を流し、電磁石9と11の電流を、一方では増やし、他方で減らすプシュプル方式としなければならない。
【0041】
このため、制御システムの複雑化、定常電流による消費電力の増加が問題となる。空心コイル12、15を使用した本実施形態のスラスト磁気軸受160の場合、図4中、「本実施形態のスラスト力」として示したように、バイアス電流を流さなくても電流とスラスト力が線形であるという特徴を有する。スラスト力も従来と同程度の力を得ることができる。
【0042】
更に、永久磁石13からの磁束は空心コイル12、15に対し固定バイアス磁束として作用することになるため、スラスト力を得るのに必要な空心コイル12、15に流す電流は小さくてすむ。
なお、空心コイル12、15は必ずしも両方を配設する必要はなく、いずれか一方のみでも回転体の軸方向制御をすることは可能である。
【0043】
また、本実施形態では磁性体円板16、17を配設するとして説明したが、磁性体円板16、17は省略しても動作可能である。磁性体円板16、17を付加することにより、軸方向への発生力が増大可能となる。また、この磁性体円板16、17は、永久磁石13を主軸1に通して取り付ける場合の、がたつきを抑える効果がある。
【0044】
通常、永久磁石13はもろいため、圧入が困難であり、永久磁石13の内径は、主軸1の外径よりも大きく設計し、中間ばめ、もしくはすきまばめにする必要がある。磁性体円板16、17を、永久磁石13を間に挟んで圧入することで、永久磁石13が磁性体円板16、17を吸引し、固定できるため、がたつきの問題がなくなる。なお、円板は、非磁性体であってもよい。この場合、上下からの圧縮力で固定される。
【0045】
更に、回転中、可動子が発熱した場合の、永久磁石13と主軸1の熱膨張係数の違いから生じる問題も回避できる。主軸1の熱膨張係数が、永久磁石13よりも大きい場合、主軸1に中間ばめで永久磁石13を取り付けると、破壊する恐れがある。また、主軸1の熱膨張係数が低い場合、永久磁石13の内径が、主軸1の外径よりも大きくなり、がたつきの問題が生じる。いずれの問題も、永久磁石13の上下から磁性体円板16、17を挿入することで解決可能である。また、磁性体円板17をセンサターゲットとすることで、スラスト方向の変位も計測である。
【0046】
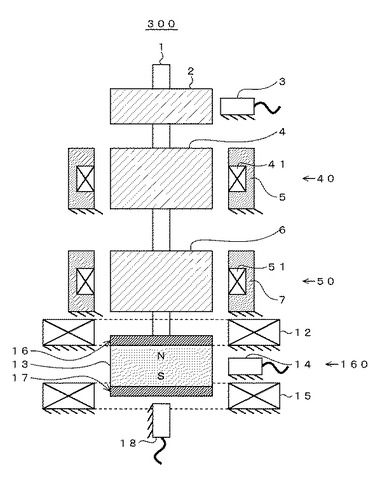
次に、本発明の第2実施形態について説明する。第2実施形態は、主軸長を短縮化する方法についてである。本発明の第2実施形態である5自由度制御型のベアリングレス回転機300の断面構成図を図2に示す。なお、図1と同一要素のものについては同一符号を付して説明は省略する。
ベアリングレス回転機300において、上下に2個配置された空心コイル12、15の間に径方向変位センサ14が挿入されている。そして、永久磁石13の周囲には金属メッキが施されており、この永久磁石13が径方向変位センサ14のターゲットとなっている。
【0047】
かかる構成において、永久磁石13の外周をセンサターゲットとすることで、余分なセンサターゲットを排除し、軸長の短縮化が実現可能となる。センサ感度向上のため、めっきは磁性体であるニッケル等が望ましい。一方、めっきではなく、永久磁石13の外周に薄いリングを設けてもよい。一般的に、永久磁石13の外周は真円度が低い。リングを設けることで、真円度を向上させることができる。
【0048】
リングの材質が金属の場合、リングが半径方向の変位センサのターゲットとなる。一方、リングの材質が、非金属の場合、永久磁石13のメッキ表面がターゲットとなる。
【0049】
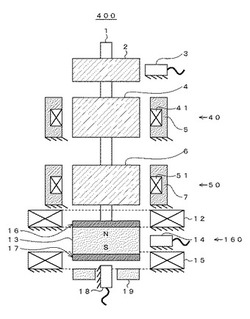
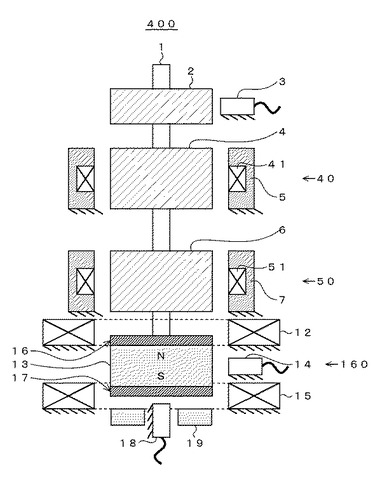
次に、本発明の第3実施形態について説明する。本発明の第3実施形態である5自由度制御型のベアリングレス回転機400の断面構成図を図3に示す。なお、図1と同一要素のものについては同一符号を付して説明は省略する。
【0050】
図3において、永久磁石13下方には永久磁石13と対峙するように中空リング形状の永久磁石19がハウジング26に固定されている。
かかる構成において、永久磁石19を図3中上側がN極、下側がS極とすると、永久磁石13との間に定常的に磁気吸引力が発生する。この磁気吸引力を加えることにより、ポンプ動作時には羽根車21に作用するスラスト力と平衡、もしくは一部をキャンセルして、空心コイル12、15の電流を節約する効果がある。
【0051】
一方、永久磁石19の磁極を上記と反対にすれば、主軸1に対し反対方向のスラスト力、すなわち、反発力を発生することができる。反発力が必要なときに有効である。更に、永久磁石19をスラスト方向に可動とし、永久磁石13との距離を調整すれば、発生スラスト力が調整できる。また、本実施形態では、永久磁石13と永久磁石19に磁気吸引力を発生させるとして説明したが、永久磁石19を必ずしも配設する必要はなく、永久磁石19に代えて鉄板、鉄リングなどの強磁性体を配設するようにしてもよい。この場合、コストを削減できるメリットがある。
【図面の簡単な説明】
【0052】
【図1】本発明の第1実施形態である5自由度制御型のベアリングレス回転機の断面構成図
【図2】本発明の第2実施形態である5自由度制御型のベアリングレス回転機の断面構成図
【図3】本発明の第3実施形態である5自由度制御型のベアリングレス回転機の断面構成図
【図4】有限要素法によるスラスト方向発生力解析結果
【図5】従来のベアリングレス回転機の断面図
【図6】ベアリングレスモータユニット回りの斜視構成図
【図7】ベアリングレス回転機をポンプに適用した構造例
【符号の説明】
【0053】
1 主軸
2、8 センサターゲット
3 径方向変位センサ
4、6 可動子
5、7 固定子
12、15 空心コイル
13、19 永久磁石
14 径方向変位センサ
16、17 磁性体円板
18 軸方向変位センサ
40、50 ベアリングレスモータユニット
60、160 スラスト磁気軸受
200、300、400 ベアリングレス回転機
【技術分野】
【0001】
本発明はスラスト力発生装置及び該スラスト力発生装置を適用した電磁機械に係わり、特に組み立て作業が簡単であり、部品点数の低減及び主軸長の短縮化を図ったスラスト力発生装置及び該スラスト力発生装置を適用した電磁機械に関する。
【背景技術】
【0002】
ベアリングレスモータは、主軸が磁気浮上しながら、非接触で回転が可能なモータである(例えば、非特許文献1参照)。一般的なモータでは、固定子に回転用の巻線(電動機巻線)が施されているが、ベアリングレスモータでは、更に、磁気浮上用の巻線(軸支持巻線)が追加で施されている。この軸支持巻線に電流を流すと、主軸の半径方向には磁気力が作用する。主軸の半径方向の変位を計測し、この磁気力を調整することで、非接触磁気浮上支持が可能になる。
【0003】
従来、このベアリングレスモータ2機と、スラスト磁気軸受を用いて、主軸の回転方向(θz)以外の5自由度運動(x、y、z、θx、θy)を磁気浮上制御するベアリングレス回転機が報告されている(例えば、非特許文献2参照)。このベアリングレス回転機100は、図5の断面図に示すように、可動子4と固定子5から構成されるベアリングレスモータユニット40、可動子6と固定子7から構成されるベアリングレスモータユニット50、及びスラスト磁気軸受60の3ユニット構造である。
【0004】
図6には、またベアリングレスモータユニット40及びベアリングレスモータユニット50回りの斜視構成図を示す。図5において、径方向変位センサ3はx軸とy軸用にそれぞれ配設され、図示しないハウジングに固定されており、主軸1に固定された円柱状のセンサターゲット2との間の距離を測定するようになっている。また、径方向変位センサ14も同様に、x軸とy軸用にそれぞれ配設され、回転軸1に固定された円柱状のセンサターゲット8との間の距離を測定するようになっている。
【0005】
一方、スラスト磁気軸受60は、円板状の磁性ディスク10と、それを挟む2個の固定子電磁石9及び11から構成される。主軸の軸方向運動(z)は、このスラスト磁気軸受により制御されるようになっている。また、軸方向変位センサ18は、磁性ディスク10をセンサターゲットとして、スラスト方向の変位を測定するようになっている。
【0006】
ベアリングレスモータ40、50の可動子4及び可動子6、センサターゲット2及びセンサターゲット8、磁性ディスク10は主軸1により貫通固定されている。この主軸1は、径の大きな磁性ディスク10が主軸1の下端部に固定されているため、回転体全体として凸型の形状を有する。また、変位センサは、1自由度を制御するために、少なくとも1個必要である。
【0007】
次に、図5に基づき磁気軸受の動作原理を説明する。図示しない制御装置は、径方向変位センサ3及び径方向変位センサ14により、半径方向(x、y)、及び、コニカル方向(θx、θy)の変位・角度を計測し、電磁石41、51に適切な電流を流すことで、主軸1の4自由度運動を能動的に制御する。
一方、軸方向については、主軸1に対し紙面上方向に外力が加わった場合、制御装置が電磁石11に電流を流し、磁性ディスク10を吸引することで、主軸1が移動しないように制御する。一方、主軸1に対し紙面下方向に外力が加わったら、制御装置が電磁石9に電流を流す。このときの電流とスラスト力の関係は非線形である。線形化するには、バイアス電流を流し、電磁石9と11の電流を、一方では増やし、他方で減らすプシュプル方式とする必要がある。
【0008】
現在、この5自由度制御型ベアリングレス回転機の図7に示すような産業用遠心ポンプへの応用が検討されている。
図7にこのポンプ用途向けの従来の5軸能動制御型ベアリングレスモータの全体構造図を示す。なお、図5と同一要素のものについては同一符号を付して説明は省略する。
【0009】
図7において、主軸1の左端には羽根車21が配設されており、ポンプ吸入口22より所定の流体が吸引され、ポンプ吐出口25よりこの流体が吐出されるようになっている。
前述したベアリングレスモータ40、50をポンプに適用した場合、主軸1の5自由度運動を能動的に制御しているため、ポンプ駆動中、主軸1に流体力が作用しても、安定して動作可能である。
【0010】
そして、また、主軸1と一体化した羽根車21を完全非接触で浮上回転させることができるため、シール(軸封)・軸受・潤滑油などが不要となり、メンテナンスフリーで発塵のないクリーンな液送が可能なポンプを実現できる。
しかし、この様な用途では、液体が固定子と可動子の間に流れ込むため、固定子・可動子表面を樹脂カバー等の隔壁23で覆う必要がある。
【0011】
なお、半径方向2自由度制御のベアリングレス回転機のみでポンプを構成した場合(例えば特許文献1や非特許文献3参照)、ポンプ駆動中のスラスト方向推進力により、羽根車21に力が作用し、羽根車21とハウジング26が衝突する恐れがある。
【0012】
【非特許文献1】A. Chibaら著,「Magnetic Bearings and Bearingless Drives」,Elsevier Newnes Press出版、2005年、p.12−34
【非特許文献2】朝間ら著,「ワイドギャップベアリングレスモータの磁気支持特性」,平成19年電気学会産業応用部門大会,III-157−162
【非特許文献3】M. Neffら著,「Bearingless centrifugal pump for highly pure chemicals」,ISMB-8,pp.283-287,2002
【特許文献1】特開2001−016887「電気式回転駆動装置」
【発明の開示】
【発明が解決しようとする課題】
【0013】
ところで、上記した従来のポンプでは、回転体が全体として凸型の形状を有することから、隔壁23の加工が複雑となったり、回転体をハウジング内部に挿入するのに、ハウジングを分離する等の必要があり、組み立て作業が煩雑である。このため、高コストで、生産性が悪くなる恐れがあった。
また、この様な可動子や固定子を覆う隔壁23には角部が多く形成されているため、クラックが入りやすく、機械強度が弱くなる恐れがあった。
【0014】
更に、磁性ディスク10の外周が大きいため、周速が早く、キャビテーションの発生する可能性が高かった。
更に、図5の断面図に示すように、径方向変位センサ14と、磁性体コアを有する電磁石9との距離が近い。この様な変位センサと鉄心の距離が近いと、渦電流型やインダクタンス型等の径方向変位センサ14を用いた場合、測定感度が低下する恐れがあった。
【0015】
本発明はこの様な従来の課題に鑑みてなされたもので、組み立て作業が簡単であり、部品点数の低減及び主軸長の短縮化を図ったスラスト力発生装置及び該スラスト力発生装置を適用した電磁機械を提供することを目的とする。
【課題を解決するための手段】
【0016】
このため本発明(請求項1)のスラスト力発生装置は、主軸に取り付けられた第1の永久磁石と、該第1の永久磁石の周囲でかつ該第1の永久磁石の重心より軸方向に所定距離ずれた位置に捲回された鉄心を有さない空心コイルとを備え、該空心コイルに電流を供給することにより、軸方向の電磁力を発生することを特徴とする。
【0017】
空心コイルに対し電流を流すと、ローレンツ力が空心コイルに作用する。空心コイルは固定されているため、その反作用を受け、第1の永久磁石にはローレンツ力とは逆方向に力が作用する。このことにより、空心コイルに適切な電流を流すことで、主軸のスラスト方向運動を能動的に制御することができる。
空心コイルには鉄心が無いため、径方向変位センサ等と距離を近く配設されても従来のように渦電流やインダクタンスの値が変化する等によりセンサの測定感度が低下することはなくなる。
【0018】
また、本発明(請求項2)のスラスト力発生装置は、前記空心コイルが、主軸正方向にずれた位置に配設された第1のコイルと、主軸負方向にずれた位置に該第1のコイルに対して対称的に配設された第2のコイルとを備え、該第2のコイル及び前記第1のコイルとがそれぞれ電流制御されることを特徴とする。
【0019】
第1のコイルと第2のコイルに対しそれぞれローレンツ力が発生するので、スラスト力を増大させることができる。
【0020】
更に、本発明(請求項3)のスラスト力発生装置は、前記第1の永久磁石の主軸方向端には支持板を備えて構成した。
【0021】
この支持板を金属で構成した場合、この金属板により、第1のコイル及び第2のコイルに対し磁束を集中させることができるようになる。このため、軸方向への発生力が増大可能となる。また、この金属板は、第1の永久磁石を主軸に対し取り付ける場合の、がたつきを抑える効果がある。なお、支持板は非金属で構成することも可能である。この場合であっても第1の永久磁石を主軸に対し取り付ける場合の、がたつきを抑える効果は同様に得ることができる。なお、金属板は、磁性体もしくは非磁性体であってもよい。
【0022】
更に、本発明(請求項4)の電磁機械は、請求項1〜3のいずれか1項に記載のスラスト力発生装置と、前記主軸に径方向の電磁力を発生する径方向力発生装置とを備え、前記第1の永久磁石の直径が、前記径方向力発生装置の固定子内側の直径以下に形成されたことを特徴とする。
【0023】
電磁機械は例えばベアリングレスモータや磁気軸受装置を備えたものである。径方向力発生装置は、主軸に対し径方向制御のみを行うものであってもよいし、回転駆動を伴うものであってもよい。
第1の永久磁石の直径が、径方向力発生装置の固定子内側の直径以下に形成されたことで、回転体全体として円筒形状になりハウジング内に回転体を挿入しやすくできる。このため、電磁機械を適用したポンプの組み立て作業が楽に行える。第1の永久磁石の直径は従来の磁性ディスクの寸法より小さいため、キャビテーションも生じ難い。
【0024】
更に、本発明(請求項5)の電磁機械は、前記第1の永久磁石の外周面、もしくは該外周面の表面に形成されたメッキ面、もしくは該外周面を被覆するリングの外周面のいずれかに対して径方向の変位を検出する径方向変位センサを備えて構成した。
【0025】
第1の永久磁石の外周をセンサターゲットとすることで、余分なセンサターゲットを排除し、軸長の短縮化が実現可能となる。
【0026】
更に、本発明(請求項6)の電磁機械は、前記第1の永久磁石の主軸方向端に対峙するように固定子側に別途第2の永久磁石が配設され、該第2の永久磁石が前記第1の永久磁石に対しスラスト方向に反発力、もしくは吸引力を発生することを特徴とする。
【0027】
第2の永久磁石が第1の永久磁石に対しスラスト方向に反発力、もしくは吸引力を発生することで例えばポンプ駆動中に羽根車に作用するスラスト力と平衡、もしくは一部をキャンセルして、空心コイルの電流を節約することができる。
【0028】
更に、本発明(請求項7)の電磁機械は、前記径方向力発生装置は、前記主軸を磁気浮上させつつ非接触で回転させるベアリングレスモータであることを特徴とする。
【発明の効果】
【0029】
以上説明したように本発明によれば、主軸に取り付けられた第1の永久磁石と、鉄心を有さない空心コイルとを備えて構成したので、空心コイルに電流を供給することにより、軸方向の電磁力を発生することができる。空心コイルに適切な電流を流すことで、主軸のスラスト方向運動を能動的に制御することができる。
【0030】
また、第1の永久磁石の直径を径方向力発生装置の固定子内側の直径以下に形成したので、回転体全体として円筒形状になりハウジング内に回転体を挿入しやすくできる。このため、電磁機械を適用したポンプの組み立て作業が楽に行える。第1の永久磁石の直径は従来の磁性ディスクの寸法より小さいため、キャビテーションも生じ難い。
以上により、生産性が良好でコンパクトな電磁機械が実現できる。具体的には、主軸長が20〜30%程度低減可能である。
【発明を実施するための最良の形態】
【0031】
以下、本発明の実施形態について説明する。本発明の第1実施形態である5自由度制御型のベアリングレス回転機200の断面構成図を図1に示す。なお、図5と同一要素のものについては同一符号を付して説明は省略する。図1が従来の図5に示すベアリングレス回転機100の構成と異なるのは、従来のスラスト磁気軸受60部分が径の大きな磁性ディスク10を適用していたため回転体が全体として凸型の形状を有していたのに対し、第1実施形態のスラスト磁気軸受160の回転体部分が全体として円筒状に形成された点である。
【0032】
図1において、主軸1の下端部分には磁性体円板16、17により上下から挟まれた可動子となる円柱状の永久磁石13が取り付けられている。永久磁石13は、上面がN極、下面がS極に着磁されている。この永久磁石13の径方向寸法は、ベアリングレスモータ40、50の可動子4、6、及びセンサターゲット2、8と同じである。
【0033】
そして、この永久磁石13、磁性体円板16、17の外周であって、かつこの永久磁石の重心より所定距離高い位置には固定子となる空心コイル12が配設されている。空心コイル12は主軸1回りに捲回されているが、この空心コイル12には従来のように鉄心は配設されていない。そして、この空心コイル12はハウジング26を形成する樹脂により固定されている。
【0034】
一方、この空心コイル12と永久磁石の重心を隔てた重心より所定距離低い対称となる位置に空心コイル15が同様に配設されている。空心コイル12、15には、永久磁石13で発生した磁束が通過するようになっている。
【0035】
次に、本発明の第1実施形態の動作を説明する。
永久磁石13の径方向寸法をベアリングレスモータ40、50の可動子4、6、及びセンサターゲット2、8と同じにしたことで、回転体全体として円筒形状になりハウジング26内に回転体を挿入しやすくできる。このため、ポンプの組み立て作業が楽に行える。樹脂カバーとしての隔壁23も円筒状に形成できるため機械強度が増す。永久磁石13の径方向寸法は従来の磁性ディスク10の寸法より小さいため、キャビテーションも生じ難い。但し、この永久磁石13の径方向寸法は可動子4、6、及びセンサターゲット2、8の径方向寸法より小さくされてもよい。
【0036】
図1のスラスト磁気軸受160の動作原理を説明する。永久磁石13の上面のN極から発した磁束は空心コイル12に交差した後、空心コイル12及び空心コイル15の外側を通る。そして、空心コイル15を交差した後下面のS極に戻る。従って、空心コイル12には、永久磁石13のN極から出て半径方向外側に向かう磁束が通り、空心コイル15では、内側に向かってS極に流れ込む磁束が通る。
【0037】
空心コイル12に対し図中紙面手前側から奥方向に向けた電流を流し、一方、空心コイル15に対し図中紙面奥方向から手前側に向けた電流を流すと、ローレンツ力が空心コイル12、15の下方向に作用する。空心コイル12、15は固定されているため、その反作用を受け、永久磁石13には上方向の力が作用する。
【0038】
また、空心コイル12、15に対し上記とは逆方向に電流を流せば永久磁石13には下方向の力を作用することができる。従って、主軸1の軸方向変位を軸方向変位センサ18で計測し、空心コイル12、15に適切な電流を流すことで、主軸1のスラスト方向運動を能動的に制御することができる。
空心コイル12には鉄心が無いため、径方向変位センサ14と距離を近く配設されても従来のように渦電流やインダクタンスの値が変化する等によりセンサの測定感度が低下することはなくなる。
【0039】
このスラスト磁気軸受160は、可動子に永久磁石13を使用しているため、周辺の固定子に磁性体を使用しない。このため、主軸1が半径方向に変位しても、スラスト磁気軸受160による磁気吸引力が発生しない。従って、スラスト磁気軸受160がベアリングレスモータ40、50へ及ぼす影響を極小にできる。
【0040】
また、図4に、有限要素法による磁場解析結果を示す。横軸はコイルを流れる電流、縦軸はスラスト方向の発生力である。図4に示すように、図5の構成による従来のスラスト磁気軸受60では、電流とスラスト力の関係は非線形である。線形化するためには、バイアス電流を流し、電磁石9と11の電流を、一方では増やし、他方で減らすプシュプル方式としなければならない。
【0041】
このため、制御システムの複雑化、定常電流による消費電力の増加が問題となる。空心コイル12、15を使用した本実施形態のスラスト磁気軸受160の場合、図4中、「本実施形態のスラスト力」として示したように、バイアス電流を流さなくても電流とスラスト力が線形であるという特徴を有する。スラスト力も従来と同程度の力を得ることができる。
【0042】
更に、永久磁石13からの磁束は空心コイル12、15に対し固定バイアス磁束として作用することになるため、スラスト力を得るのに必要な空心コイル12、15に流す電流は小さくてすむ。
なお、空心コイル12、15は必ずしも両方を配設する必要はなく、いずれか一方のみでも回転体の軸方向制御をすることは可能である。
【0043】
また、本実施形態では磁性体円板16、17を配設するとして説明したが、磁性体円板16、17は省略しても動作可能である。磁性体円板16、17を付加することにより、軸方向への発生力が増大可能となる。また、この磁性体円板16、17は、永久磁石13を主軸1に通して取り付ける場合の、がたつきを抑える効果がある。
【0044】
通常、永久磁石13はもろいため、圧入が困難であり、永久磁石13の内径は、主軸1の外径よりも大きく設計し、中間ばめ、もしくはすきまばめにする必要がある。磁性体円板16、17を、永久磁石13を間に挟んで圧入することで、永久磁石13が磁性体円板16、17を吸引し、固定できるため、がたつきの問題がなくなる。なお、円板は、非磁性体であってもよい。この場合、上下からの圧縮力で固定される。
【0045】
更に、回転中、可動子が発熱した場合の、永久磁石13と主軸1の熱膨張係数の違いから生じる問題も回避できる。主軸1の熱膨張係数が、永久磁石13よりも大きい場合、主軸1に中間ばめで永久磁石13を取り付けると、破壊する恐れがある。また、主軸1の熱膨張係数が低い場合、永久磁石13の内径が、主軸1の外径よりも大きくなり、がたつきの問題が生じる。いずれの問題も、永久磁石13の上下から磁性体円板16、17を挿入することで解決可能である。また、磁性体円板17をセンサターゲットとすることで、スラスト方向の変位も計測である。
【0046】
次に、本発明の第2実施形態について説明する。第2実施形態は、主軸長を短縮化する方法についてである。本発明の第2実施形態である5自由度制御型のベアリングレス回転機300の断面構成図を図2に示す。なお、図1と同一要素のものについては同一符号を付して説明は省略する。
ベアリングレス回転機300において、上下に2個配置された空心コイル12、15の間に径方向変位センサ14が挿入されている。そして、永久磁石13の周囲には金属メッキが施されており、この永久磁石13が径方向変位センサ14のターゲットとなっている。
【0047】
かかる構成において、永久磁石13の外周をセンサターゲットとすることで、余分なセンサターゲットを排除し、軸長の短縮化が実現可能となる。センサ感度向上のため、めっきは磁性体であるニッケル等が望ましい。一方、めっきではなく、永久磁石13の外周に薄いリングを設けてもよい。一般的に、永久磁石13の外周は真円度が低い。リングを設けることで、真円度を向上させることができる。
【0048】
リングの材質が金属の場合、リングが半径方向の変位センサのターゲットとなる。一方、リングの材質が、非金属の場合、永久磁石13のメッキ表面がターゲットとなる。
【0049】
次に、本発明の第3実施形態について説明する。本発明の第3実施形態である5自由度制御型のベアリングレス回転機400の断面構成図を図3に示す。なお、図1と同一要素のものについては同一符号を付して説明は省略する。
【0050】
図3において、永久磁石13下方には永久磁石13と対峙するように中空リング形状の永久磁石19がハウジング26に固定されている。
かかる構成において、永久磁石19を図3中上側がN極、下側がS極とすると、永久磁石13との間に定常的に磁気吸引力が発生する。この磁気吸引力を加えることにより、ポンプ動作時には羽根車21に作用するスラスト力と平衡、もしくは一部をキャンセルして、空心コイル12、15の電流を節約する効果がある。
【0051】
一方、永久磁石19の磁極を上記と反対にすれば、主軸1に対し反対方向のスラスト力、すなわち、反発力を発生することができる。反発力が必要なときに有効である。更に、永久磁石19をスラスト方向に可動とし、永久磁石13との距離を調整すれば、発生スラスト力が調整できる。また、本実施形態では、永久磁石13と永久磁石19に磁気吸引力を発生させるとして説明したが、永久磁石19を必ずしも配設する必要はなく、永久磁石19に代えて鉄板、鉄リングなどの強磁性体を配設するようにしてもよい。この場合、コストを削減できるメリットがある。
【図面の簡単な説明】
【0052】
【図1】本発明の第1実施形態である5自由度制御型のベアリングレス回転機の断面構成図
【図2】本発明の第2実施形態である5自由度制御型のベアリングレス回転機の断面構成図
【図3】本発明の第3実施形態である5自由度制御型のベアリングレス回転機の断面構成図
【図4】有限要素法によるスラスト方向発生力解析結果
【図5】従来のベアリングレス回転機の断面図
【図6】ベアリングレスモータユニット回りの斜視構成図
【図7】ベアリングレス回転機をポンプに適用した構造例
【符号の説明】
【0053】
1 主軸
2、8 センサターゲット
3 径方向変位センサ
4、6 可動子
5、7 固定子
12、15 空心コイル
13、19 永久磁石
14 径方向変位センサ
16、17 磁性体円板
18 軸方向変位センサ
40、50 ベアリングレスモータユニット
60、160 スラスト磁気軸受
200、300、400 ベアリングレス回転機
【特許請求の範囲】
【請求項1】
主軸に取り付けられた第1の永久磁石と、
該第1の永久磁石の周囲でかつ該第1の永久磁石の重心より軸方向に所定距離ずれた位置に捲回された鉄心を有さない空心コイルとを備え、
該空心コイルに電流を供給することにより、軸方向の電磁力を発生することを特徴とするスラスト力発生装置。
【請求項2】
前記空心コイルが、主軸正方向にずれた位置に配設された第1のコイルと、
主軸負方向にずれた位置に該第1のコイルに対して対称的に配設された第2のコイルとを備え、
該第2のコイル及び前記第1のコイルとがそれぞれ電流制御されることを特徴とする請求項1記載のスラスト力発生装置。
【請求項3】
前記第1の永久磁石の主軸方向端には支持板を備えたことを特徴とする請求項1又は請求項2のいずれかに記載のスラスト力発生装置。
【請求項4】
請求項1〜3のいずれか1項に記載のスラスト力発生装置と、
前記主軸に径方向の電磁力を発生する径方向力発生装置とを備え、
前記第1の永久磁石の直径が、前記径方向力発生装置の固定子内側の直径以下に形成されたことを特徴とする電磁機械。
【請求項5】
前記第1の永久磁石の外周面、もしくは該外周面の表面に形成されたメッキ面、
もしくは該外周面を被覆するリングの外周面のいずれかに対して径方向の変位を
検出する径方向変位センサを備えたことを特徴とする請求項4記載の電磁機械。
【請求項6】
前記第1の永久磁石の主軸方向端に対峙するように固定子側に別途第2の永久磁石が配設され、該第2の永久磁石が前記第1の永久磁石に対しスラスト方向に反発力、もしくは吸引力を発生することを特徴とする請求項4又は請求項5のいずれかに記載の電磁機械。
【請求項7】
前記径方向力発生装置は、前記主軸を磁気浮上させつつ非接触で回転させるベアリングレスモータであることを特徴とする請求項4〜6のいずれか1項に記載の電磁機械。
【請求項1】
主軸に取り付けられた第1の永久磁石と、
該第1の永久磁石の周囲でかつ該第1の永久磁石の重心より軸方向に所定距離ずれた位置に捲回された鉄心を有さない空心コイルとを備え、
該空心コイルに電流を供給することにより、軸方向の電磁力を発生することを特徴とするスラスト力発生装置。
【請求項2】
前記空心コイルが、主軸正方向にずれた位置に配設された第1のコイルと、
主軸負方向にずれた位置に該第1のコイルに対して対称的に配設された第2のコイルとを備え、
該第2のコイル及び前記第1のコイルとがそれぞれ電流制御されることを特徴とする請求項1記載のスラスト力発生装置。
【請求項3】
前記第1の永久磁石の主軸方向端には支持板を備えたことを特徴とする請求項1又は請求項2のいずれかに記載のスラスト力発生装置。
【請求項4】
請求項1〜3のいずれか1項に記載のスラスト力発生装置と、
前記主軸に径方向の電磁力を発生する径方向力発生装置とを備え、
前記第1の永久磁石の直径が、前記径方向力発生装置の固定子内側の直径以下に形成されたことを特徴とする電磁機械。
【請求項5】
前記第1の永久磁石の外周面、もしくは該外周面の表面に形成されたメッキ面、
もしくは該外周面を被覆するリングの外周面のいずれかに対して径方向の変位を
検出する径方向変位センサを備えたことを特徴とする請求項4記載の電磁機械。
【請求項6】
前記第1の永久磁石の主軸方向端に対峙するように固定子側に別途第2の永久磁石が配設され、該第2の永久磁石が前記第1の永久磁石に対しスラスト方向に反発力、もしくは吸引力を発生することを特徴とする請求項4又は請求項5のいずれかに記載の電磁機械。
【請求項7】
前記径方向力発生装置は、前記主軸を磁気浮上させつつ非接触で回転させるベアリングレスモータであることを特徴とする請求項4〜6のいずれか1項に記載の電磁機械。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2009−192041(P2009−192041A)
【公開日】平成21年8月27日(2009.8.27)
【国際特許分類】
【出願番号】特願2008−35813(P2008−35813)
【出願日】平成20年2月18日(2008.2.18)
【出願人】(803000115)学校法人東京理科大学 (545)
【Fターム(参考)】
【公開日】平成21年8月27日(2009.8.27)
【国際特許分類】
【出願日】平成20年2月18日(2008.2.18)
【出願人】(803000115)学校法人東京理科大学 (545)
【Fターム(参考)】
[ Back to top ]