
スーパーインポーズステアリング
運転者によって入力される操舵角に、必要な場合に別の角度をスーパーインポーズすることができるスーパーインポーズステアリング(1)において、スーパーインポーズステアリングのスーパーインポーズ機能が、個々に操作可能な構造群(16,17,21)によって実現される。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、運転者によって入力される操舵角に、必要な場合に別の角度をスーパーインポーズすることができるスーパーインポーズステアリングに関する。
【背景技術】
【0002】
今日の自動車、特に乗用車は、通常、油圧又は電気油圧式のパワーステアリングを備えており、このパワーステアリングの場合、ステアリングホイールは、機械的に操舵可能な車輪と強制的に連結されている。パワーアシスト部は、ステアリングメカニズムの中心領域に、アクチュエータ、例えば油圧シリンダが配設されているように構成されている。アクチュエータによって発生される力によって、ステアリングホイールの回転に対応してステアリングメカニズムの操作がアシストされる。これにより、操舵工程での運転者の力の消費が軽減される。
【0003】
スーパーインポーズステアリングが公知である。このスーパーインポーズステアリングは、運転者によって入力される操舵角に、必要な場合に別の角度をアクチュエータによってスーパーインポーズすることができることを特徴とする。この付加的な角度は、電子コントロールによって制御され、例えば車両の安定性及び敏捷性を向上させるために使用される。油圧又は電気的なアクチュエータが使用される。
【発明の開示】
【発明が解決しようとする課題】
【0004】
本発明の課題は、運転者によって入力される操舵角に別の角度を安全かつ確実にスーパーインポーズすることができるスーパーインポーズステアリングを提供することにある。この場合、スーパーインポーズステアリングのための駆動機構は、簡単にステアリングシステムに統合することができ、僅かな構造空間しか要求しないものであるべきである。
【課題を解決するための手段】
【0005】
この課題は、特許請求項1の特徴によって解決される。本発明の特別な形成は、下位の請求項に記載されている。
【0006】
本発明によれば、スーパーインポーズステアリングのスーパーインポーズ機能は、個々に操作可能な構造群もしくはモジュールによって実現される。
【0007】
この場合、原理では、ステアリングロッドに付加的操舵力を加え、ステアリングシャフトに付加的操舵トルクを加えるパワーステアリングのために適用が可能である。
【0008】
本発明によれば、スーパーインポーズギヤでは、駆動機能が1つ又は複数の駆動機能モジュールによって、安全機能が駆動機能モジュールから分離された1つ又は複数の安全機能モジュールによって実現される。
【0009】
本発明によれば、スーパーインポーズステアリングは、少なくとも1つのセカンダリギヤモジュールとプライマリギヤモジュールとを個々に操作可能な2つの構造群として備えるスーパーインポーズギヤを備える。
【0010】
本発明によれば、セカンダリギヤモジュールは、駆動モータと、平歯車又はベルト駆動機構−好ましくはベルト駆動機構−と、プライマリギヤ駆動ユニットとを備える。
【0011】
本発明によれば、プライマリギヤ駆動ユニットは、両側に作用するトルク制御されるフリーホイールを備え、このフリーホイールは、操舵トルクのノミナル領域−好ましくは約5〜10Nmの操舵トルク領域−では、要求されたスーパーインポーズ角を、セカンダリギヤとプライマリギヤとによってスーパーインポーズステアリングのステアリングギヤに伝達し、過負荷時で、調達された操舵トルクがノミナル領域外に出た場合−これは、調達された操舵トルクが好ましくは約5〜10Nmの操舵トルクよりも大きいことを意味する−には、プライマリギヤ駆動ユニットの逆回転を防止する手段を備える。
【0012】
本発明によれば、プライマリギヤ駆動ユニットは、アウトプットホイールと、フリーホイールスプリングと、狭持体スプリングと、狭持体と、狭持及び支承リングと、プライマリギヤのカップリングと、セカンダリギヤベアリングと、狭持斜面とを備える。
【0013】
本発明によれば、プライマリギヤモジュールは、プラネタリギヤユニットとロックユニットとを備える。
【0014】
本発明によれば、ロックユニットとして、故障時にスーパーインポーズギヤをロックするための手段を備える個々に操作可能な構造群が、プライマリギヤもしくはプライマリギヤハウジング内に設けられている。
【0015】
本発明によれば、スーパーインポーズステアリングは、プラネタリギヤをスーパーインポーズギヤとして備え、ロックユニットは、電気操作可能であり、電源の故障又は妥当性の故障のような故障が発生した場合に、噛合い係合による結合部を介して、好ましくはセレーションを介してプラネタリキャリヤハウジングをロックする。
【0016】
本発明によれば、スーパーインポーズステアリングは、分割されたステアリングコラムに組み込むことによって、油圧又は電気油圧式のパワーステアリングに統合されている。換言すれば、スーパーインポーズステアリングのスーパーインポーズ機能のための手段が、「通常」の油圧又は電気油圧式のパワーステアリングに、ステアリングコラムへの「スーパーインポーズ機能モジュール」として統合されているということである。
【発明を実施するための最良の形態】
【0017】
実施例及び図面(図1〜図18)を基にして、本発明を模範的に詳細に説明する。
【0018】
21は、好ましくは予組立て及び試験された個々に操作可能な構造群であり、プライマリギヤハウジング43に、内部リング44によって噛合い係合及び摩擦係合するように軸方向に組み立てられる。ロックユニット21を組み立てる場合、同時に内部又は外部の回路(図14の破線62)への統合された操作磁石46の接続45が行なわれる。
【0019】
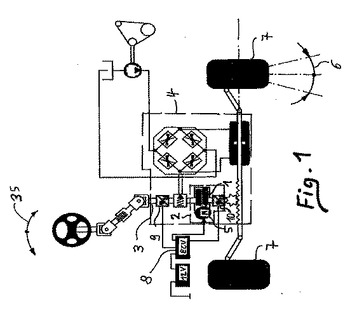
本発明によるスーパーインポーズステアリング(ESAS/Electric Steer Assisted Steering)の適用例を、図1は、概略図で示す。
【0020】
この場合、スーパーインポーズステアリング2のスーパーインポーズギヤ1は、通常のパワーステアリング4の分割されたステアリングコラム3に統合されている。配設された電動モータ5を介入させることによって、スーパーインポーズギヤ1により、増加又は減少された操舵角6を前輪7に発生させることができる(可変操舵角)。可変操舵角は、電動モータ5を制御するコントローラ8によって調整される。コントローラ8には、信号が回転角センサ9,10から供給され、この回転角センサによって、ステアリングコラム3の回転角がスーパーインポーズギヤ1の前後で検出される。スーパーインポーズ(6)によって、確認された走行状況に応じて走行特性と車両力学に積極的に影響を与えることができる。特に、ステアリング操作時に運転者を支援するために、走行力学上のステアリングへの介入を実現することができる。この場合、スーパーインポーズステアリング2は、1つのモジュールとして通常のパワーステアリング4に統合されている。
【0021】
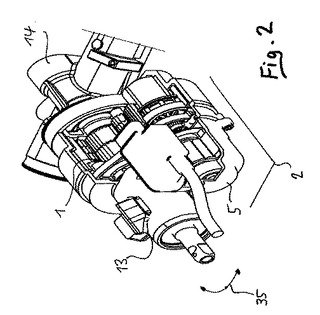
スーパーインポーズステアリング2の本質的な要素は、図2において斜視図で図示されている。
【0022】
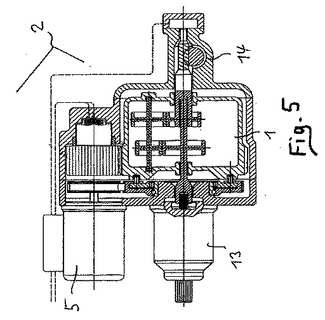
スーパーインポーズステアリング2は、本発明によれば電動モータ5を有する本来のスーパーインポーズギヤ1を、モジュール式に構成された主構造群として備える。更に、スーパーインポーズステアリング2には、本質的にモジュール式に構成された別の2つの主構造群が、即ち本質的に通常のステアリングバルブ13と本質的に通常のステアリングギヤ14とが付設されている。
【0023】
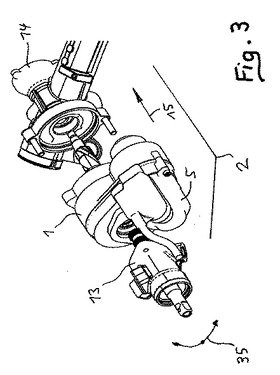
図3は、図2に図示したスーパーインポーズステアリング2を、個々の要素又は主構造群が立体的に互いに分離されている図で示す。
【0024】
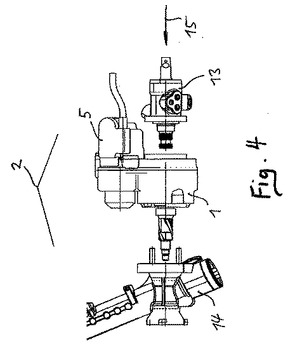
図4には、図3に図示したスーパーインポーズステアリング2の要素が斜視図で図示されている。
【0025】
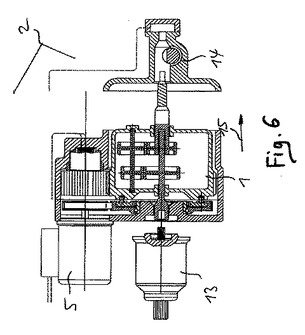
図5には、スーパーインポーズステアリングの本質的な要素が横断面図で示されており、図6には、スーパーインポーズステアリングのこれらの個々の要素が、立体的に互いに分離されて横断面図で図示されている。
【0026】
個々に操作可能な構造群もしくはモジュールとしての個々の要素(1と5,13,14)の構造によって、これらの構造群は、その基礎機能を個々に試験可能であり、軸方向(矢印15参照)にスーパーインポーズステアリング2のシステム全体を構成するように組立て可能である。
【0027】
これは、ステアリングシステムのシリーズ製造において利点を提供する。何故なら、モジュール式に構成することによって、予め試験された構造群の最終組立てが可能であるからである。加えて、スーパーインポーズギヤ1の中心ユニットは、このモジュール式の構成を選択することによって、容易に既存の油圧ステアリングシステム4に統合することができる。
【0028】
統合された本発明によるスーパーインポーズギヤ1の構造上の構成と、駆動コンセプトと安全コンセプトとを以下で説明する。
【0029】
この場合、本発明によれば、駆動コンセプトと安全のコンセプトとの分離が行なわれる。これにより、有利に高いシステム力学を得ることができ、これは、特にESP IIのような改善された走行力学コントロールのために使用可能である。
【0030】
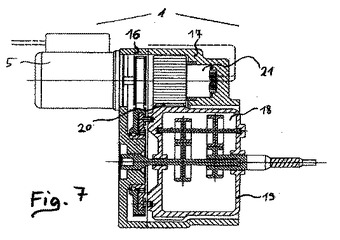
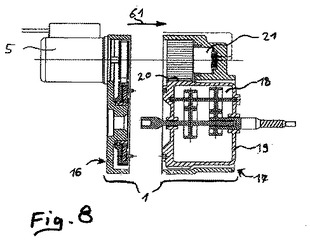
先ず、スーパーインポーズギヤの構成と機能を詳細に説明する(図7及び図8参照)。
【0031】
スーパーインポーズギヤ1自体の構造群は、2つのモジュール式の構造群を、即ちセカンダリギヤ16とプライマリギヤ17を備える。これは、スーパーインポーズギヤ1の簡単な軸方向の組立て(矢印61)を可能にする。
【0032】
プライマリギヤ17は、統合されたロックユニット21を備える。故障が生じた場合のスーパーインポーズギヤ1のロックは、噛合い係合により結合されて同調する電気操作されるロックユニット21を介して行なわれる。このロックユニットは、個々に操作可能な構造群としても構成することができる。噛合い係合による結合は、ここではセレーション20を介して行なわれる。ロックは、プラネタリキャリヤハウジング19をブロックし、これによりロックすることによって行なわれる。電気操作されるロックユニット(21)は、好ましくは通電された状態で開放している。
【0033】
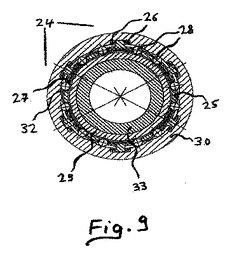
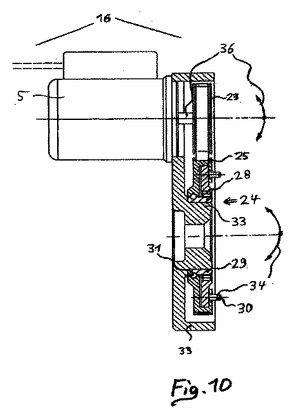
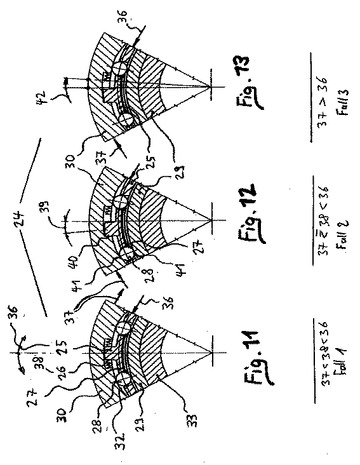
セカンダリギヤ16は、図9及び図10に詳細に示されている。以下では「ダイオード機能」とも呼ばれるセルフロック式のギヤのその機能は、図11〜図13によって図示されている。
【0034】
セカンダリギヤ16は、本質的に駆動モータ、即ち電動モータ5と、平歯車又はベルト駆動ホイール23と、セカンダリギヤハウジング33と、プライマリギヤ駆動ユニット24とから成る。
【0035】
プライマリギヤ駆動ユニット24は、本質的に駆動ホイール25と、フリーホイールスプリング26と、狭持体スプリング27と、狭持体28と、狭持及び支承リング29と、プライマリギヤのカップリング30と、セカンダリギヤベアリング31と、狭持斜面32とから成る。
【0036】
セカンダリギヤ16は、予組立てされた試験可能なユニットであり、プライマリギヤユニット17を組み立てた後駆動トルク34をプライマリギヤのカップリング30によってプラネタリギヤ18に伝達する。
【0037】
プライマリギヤ駆動ユニット24の機能を以下で説明する。
【0038】
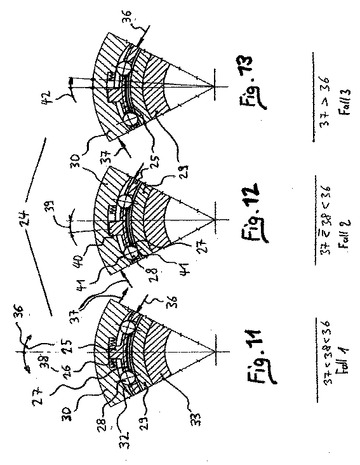
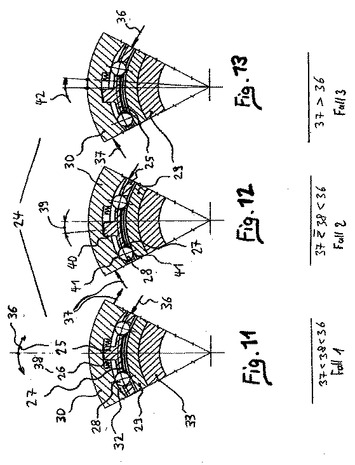
操舵トルク(35,図1〜図3参照)のノミナル領域では、好ましくは約5〜10Nmの操舵トルク領域では、要求されるスーパーインポーズ角がセカンダリギヤ16及びプライマリギヤ17によってステアリングバルブ13に、最終的にステアリングギヤ14に静的及び動的に伝達されるように、駆動モータ5のモータ駆動トルク36が設定されている。これは、反作用トルク37がモータ駆動トルク36(例1,図11参照)よりも小さいことを意味する。
【0039】
調達される操舵トルク(35,図1〜図3)がノミナル領域から外れた場合、これは、操舵トルクが約10Nmより大きいことを意味するが、モータトルク36は、プライマリギヤ17及びセカンダリギヤ16を介して発生される反作用トルク37を支持できず、この場合にはモータ5を逆回転させる。即ち、この場合には、反作用トルク37は、モータ駆動トルク36(例3,図13参照)よりも大きい(>)。これは、要求される操舵運動がもはやステアリングギヤ14に伝達されないという結果を伴う。調達された操舵トルク35は、例えば縁石の角で操舵運動を行なうテストの場合のような誤用時に、ノミナル領域から外れてしまう。プライマリギヤ駆動ユニット24に有利に構造上統合された、ここではいわゆる「ダイオード機能」は、反作用トルク37がモータ駆動トルク36よりも大きい(>)場合を意味する過負荷時のプライマリギヤ駆動ユニット14のこの逆回転を防止する。
【0040】
このいわゆる「ダイオード機能」を、以下で説明する(図11〜図13参照)。
【0041】
「ダイオード機能」は、プライマリギヤ駆動ユニット24内に統合されており、両側に作用するトルク制御されたフリーホイールによって実現される。
【0042】
ノミナル領域では、「ダイオード機能」は作動していない。ここでは、反作用トルク37は、フリーホイール作動トルク38よりも小さく(<)、モータ駆動トルク36よりも小さい(<)(例1,図11参照)。
【0043】
この場合には、モータ5によって発生されるモータ駆動トルク36は、アウトプットホイール25と予緊張されたフリーホイールスプリング26を介してプライマリギヤのカップリング30に伝達される。フリーホイールスプリング26の予緊張が得られることによって、一定のフリーホイール作動トルク38以下では、アウトプットホイール25とプライマリギヤのカップリング30間で相対回転運動が何ら行なわれない。この場合、狭持体28は、狭持体スプリング27によってプライマリギヤのカップリング30に統合された狭持斜面32に押し付けられ、噛合い係合することなく、セカンダリギヤハウジング33上に圧入されている狭持及び支承リング29へと回転が同調する。
【0044】
ノミナル領域外で、ダイオード機能が作動している。ここで、反作用トルク37は、フリーホイール作動トルク38以下(=<)であり、モータ駆動トルク36よりも小さい(<)(例2,図12参照)。
【0045】
この場合、モータ5によって発生されるモータ駆動トルク36は、フリーホイール作動トルク38を上回り、これにより「ダイオード機能」を作動させる。この場合、駆動ホイール25とプライマリギヤのカップリング30間に相対回転運動が生じ、噛合い係合による当接40が生じる。同時に、狭持体28は、統合された狭持体スプリング27によって狭持斜面32と狭持及び支承リング29間に当接41させられる。これは、「ダイオード機能」がアクティブに切り換えられており、駆動モータ5がその最大限に可能なモータ駆動トルク36に至るまでプライマリギヤ17を駆動することができることを意味する。
【0046】
過負荷領域で、「ダイオード機能」はアクティブである。この領域では、反作用トルク37は、フリーホイール作動トルク38よりも大きく(>)、モータ駆動トルク36よりも大きい(>)(例3,図13参照)。
【0047】
この場合、反作用トルク37は、モータ5によって発生されるモータ駆動トルク36とフリーホイール作動トルクを上回る。この場合は、スーパーインポーズステアリング2のノミナル作動状態外にあり、例えば縁石での発進によって生じさせることができる。
【0048】
反作用トルク37による駆動モータ5の逆回転は、プライマリギヤのカップリング30と狭持及び支承リング29間に挟まれる狭持体28によって防止される。これは、プライマリギヤ17が機械的にセカンダリギヤハウジング33にロックされることを意味する。プライマリギヤ17の機械的なロックによって、ノミナル操舵領域外で、即ち誤用時に、調整運動は、ロックユニット21を作動させることなくステアリングギヤ12に伝達することができる。
【0049】
セカンダリギヤ16に統合された「ダイオード機能」は、その機械的な特性によって、例えばセカンダリギヤのようなセルフロック式のギヤを形成する。しかしながら、セカンダリギヤ16に統合された「ダイオード機能」は、セルフロック式のギヤとは対照的に、本質的に自由であり、幾何学的な境界条件に依存せずに形成することができる。
【0050】
電気操作されるロックユニット21を以下で詳細に説明する(図12〜図16参照)。
【0051】
前記のように、平行に同調するロックユニット21は、例えばセレーション20のような噛合い係合による結合を介して、故障(電源の故障、妥当性の故障)が生じた場合にプラネタリキャリヤハウジング19をロックする。従って、コントロールされないスーパーインポーズへの介入は、機械的に防止される。車両の操舵性は、普通のステアリングギヤレシオによって維持されたままである。
【0052】
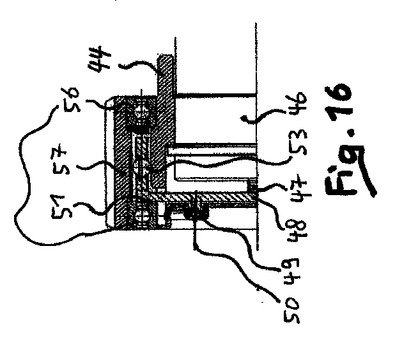
ロックユニット21は、好ましくは予組立て及び試験された個々に操作可能な構造群であり、プライマリギヤハウジング43に、内部リング44によって噛合い及び摩擦係合により軸方向に組み立てられている。ロックユニット21を組み立てる際には、同時に内部又は外部の回路(図14の破線62)への統合された操作磁石46の接続45を行なうことができる。
【0053】
スーパーインポーズステアリングの標準機能を、以下で詳細に説明する。
【0054】
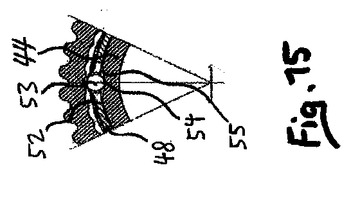
スーパーインポーズステアリング2の標準機能において、操作磁石46は通電されている。この場合、操作磁石46の操作タペット47は、操作リング48をバネ力50に抗して機械的なストッパ51に押し付ける。バネ力50は、重複して構成された圧縮バネ49によって発生される。自由に切り換えられるこの位置で、操作リング48内で噛合い係合により、統合された圧縮バネ52によって摩擦係合により拘束された狭持体53は、内部リング44に統合された狭持斜面55の下の支承点54に押し付けられる。従って、内部リング44上で軸受部56によって支承され、セレーションを切られ、プラネタリキャリヤハウジング19によって共に牽引される外部リング57は、自由に回転することができる。
【0055】
ロックユニット21のアクティブでない機能又は機能不良の状態を、以下で詳細に説明する。
【0056】
スーパーインポーズステアリング2のアクティブでない機能又は機能不良の状態では、操作磁石46は無通電状態であり、これは、操作磁石が通電されないことを意味する。圧縮バネ49によって発生されるバネ力50は、操作磁石46の無力な操作タペット47と操作リング48とを、外部リング57内で拘束されたスラストリング58の端面に押し付ける。
【0057】
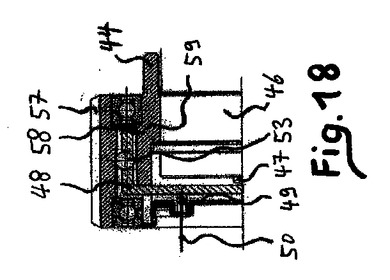
操作リング48とスラストリング58の両端面59は歯切りされており、これにより、高い操作トルクが、加わっているバネ力50によってプラネタリキャリヤハウジング/外部リング/スラストリング(19/57/58)が回転する際に操作リング48に伝達される。
【0058】
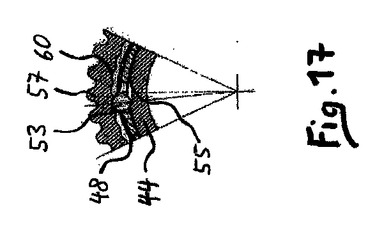
プラネタリキャリヤハウジング/外部リング/スラストリング(19/57/58)を回転させ、バネ力50によって操作トルクが生じた場合、狭持体53が拘束された操作リング48は、回転運動に移され、狭持体53を、内側60を溝切りされた外部リング57と狭持斜面55間で噛合い係合による狭持位置に移動させる。
【0059】
プラネタリキャリヤハウジング19のコントロールされない捩れが防止され、これにより、スーパーインポーズ機能のロックが得られる。
【0060】
前記実施形において図示された駆動コンセプトと安全コンセプトの分離は、本発明によるスーパーインポーズギヤ1の本質的な特徴である。この分離によって、プラネタリギヤ18の駆動機構として平行に配設されたセカンダリギヤ16のダイナミックな設計及び最適化に関して大きな自由が得られる。
【図面の簡単な説明】
【0061】
【図1】通常の油圧パワーステアリングに構成された本発明によるスーパーインポーズステアリングを示す。
【図2】スーパーインポーズステアリングの本質的な要素を斜視図で示す。
【図3】スーパーインポーズステアリングの個々の、即ち互いに分離された要素を示す。
【図4】図3に図示した要素を斜視図で示す。
【図5】スーパーインポーズステアリングの本質的な要素を横断面図で示す。
【図6】スーパーインポーズステアリングの個々の、即ち互いに分離された要素を横断面図に示す。
【図7】スーパーインポーズギヤの2つのモジュール式構造群を示す。
【図8】個々の、即ち互いに分離された要素としてスーパーインポーズギヤの2つのモジュール式構造群を示す。
【図9】スーパーインポーズギヤのセカンダリギヤ構造群からの部分図を示す。
【図10】セカンダリギヤの個々の、即ち互いに分離された要素を横断面図に示す。
【図11】ギヤの、即ちスーパーインポーズアクチュエータ(電動モータ)の、ノミナル負荷領域にある状態でスーパーインポーズギヤのセカンダリギヤ構造群からの部分図を示す。
【図12】ノミナル負荷領域の限界領域の状態でスーパーインポーズギヤのセカンダリギヤ構造群からの部分図を示す。
【図13】内部でスーパーインポーズアクチュエータ(電動モータ)が非常に大きな力もしくはトルクを発生させる、過負荷領域にある状態でスーパーインポーズギヤのセカンダリギヤ構造群からの部分図を示す。
【図14】ロックユニットを拡大図で示す。
【図15】「開放」状態のロックユニットからの第1の部分図を示す。
【図16】「開放」状態のロックユニットからの第2の部分図を示す。
【図17】「閉鎖」状態のロックユニットからの第1の部分図を示す。
【図18】「閉鎖」状態のロックユニットからの第2の部分図を示す。
【符号の説明】
【0062】
1 スーパーインポーズギヤ
2 スーパーインポーズステアリング
3 ステアリングコラム
4 パワーステアリング
5 電動モータ
6 操舵角
7 前輪
8 コントローラ
9 回転角センサ
10 回転角センサ
13 ステアリングバルブ
14 ステアリングギヤ
15 軸方向
16 セカンダリギヤ
17 プラマリギヤ
18 プラネタリギヤ
19 プラネタリキャリヤハウジング
20 セレーション
21 ロックユニット
23 平歯車又はベルト駆動ホイール
24 プライマリギヤ駆動ユニット
25 駆動ホイール
26 フリーホイールスプリング
27 狭持体スプリング
28 狭持体
29 狭持及び支承リング
30 プライマリギヤのカップリング
31 セカンダリギヤベアリング
32 狭持斜面
33 セカンダリギヤハウジング
34 駆動トルク
35 操舵トルク
36 モータ駆動トルク
37 反作用トルク
38 フリーホイール作動トルク
40 当接
41 当接
43 プライマリギヤハウジング
44 内部リング
45 接続
46 操作磁石
47 操作タペット
48 操作リング
49 圧縮バネ
50 バネ力
51 ストッパ
52 圧縮バネ
53 狭持体
54 支承点
55 狭持斜面
56 軸受部
57 外部リング
58 スラストリング
59 端面
60 内側
61 軸方向の組立て
62 回路
【技術分野】
【0001】
本発明は、運転者によって入力される操舵角に、必要な場合に別の角度をスーパーインポーズすることができるスーパーインポーズステアリングに関する。
【背景技術】
【0002】
今日の自動車、特に乗用車は、通常、油圧又は電気油圧式のパワーステアリングを備えており、このパワーステアリングの場合、ステアリングホイールは、機械的に操舵可能な車輪と強制的に連結されている。パワーアシスト部は、ステアリングメカニズムの中心領域に、アクチュエータ、例えば油圧シリンダが配設されているように構成されている。アクチュエータによって発生される力によって、ステアリングホイールの回転に対応してステアリングメカニズムの操作がアシストされる。これにより、操舵工程での運転者の力の消費が軽減される。
【0003】
スーパーインポーズステアリングが公知である。このスーパーインポーズステアリングは、運転者によって入力される操舵角に、必要な場合に別の角度をアクチュエータによってスーパーインポーズすることができることを特徴とする。この付加的な角度は、電子コントロールによって制御され、例えば車両の安定性及び敏捷性を向上させるために使用される。油圧又は電気的なアクチュエータが使用される。
【発明の開示】
【発明が解決しようとする課題】
【0004】
本発明の課題は、運転者によって入力される操舵角に別の角度を安全かつ確実にスーパーインポーズすることができるスーパーインポーズステアリングを提供することにある。この場合、スーパーインポーズステアリングのための駆動機構は、簡単にステアリングシステムに統合することができ、僅かな構造空間しか要求しないものであるべきである。
【課題を解決するための手段】
【0005】
この課題は、特許請求項1の特徴によって解決される。本発明の特別な形成は、下位の請求項に記載されている。
【0006】
本発明によれば、スーパーインポーズステアリングのスーパーインポーズ機能は、個々に操作可能な構造群もしくはモジュールによって実現される。
【0007】
この場合、原理では、ステアリングロッドに付加的操舵力を加え、ステアリングシャフトに付加的操舵トルクを加えるパワーステアリングのために適用が可能である。
【0008】
本発明によれば、スーパーインポーズギヤでは、駆動機能が1つ又は複数の駆動機能モジュールによって、安全機能が駆動機能モジュールから分離された1つ又は複数の安全機能モジュールによって実現される。
【0009】
本発明によれば、スーパーインポーズステアリングは、少なくとも1つのセカンダリギヤモジュールとプライマリギヤモジュールとを個々に操作可能な2つの構造群として備えるスーパーインポーズギヤを備える。
【0010】
本発明によれば、セカンダリギヤモジュールは、駆動モータと、平歯車又はベルト駆動機構−好ましくはベルト駆動機構−と、プライマリギヤ駆動ユニットとを備える。
【0011】
本発明によれば、プライマリギヤ駆動ユニットは、両側に作用するトルク制御されるフリーホイールを備え、このフリーホイールは、操舵トルクのノミナル領域−好ましくは約5〜10Nmの操舵トルク領域−では、要求されたスーパーインポーズ角を、セカンダリギヤとプライマリギヤとによってスーパーインポーズステアリングのステアリングギヤに伝達し、過負荷時で、調達された操舵トルクがノミナル領域外に出た場合−これは、調達された操舵トルクが好ましくは約5〜10Nmの操舵トルクよりも大きいことを意味する−には、プライマリギヤ駆動ユニットの逆回転を防止する手段を備える。
【0012】
本発明によれば、プライマリギヤ駆動ユニットは、アウトプットホイールと、フリーホイールスプリングと、狭持体スプリングと、狭持体と、狭持及び支承リングと、プライマリギヤのカップリングと、セカンダリギヤベアリングと、狭持斜面とを備える。
【0013】
本発明によれば、プライマリギヤモジュールは、プラネタリギヤユニットとロックユニットとを備える。
【0014】
本発明によれば、ロックユニットとして、故障時にスーパーインポーズギヤをロックするための手段を備える個々に操作可能な構造群が、プライマリギヤもしくはプライマリギヤハウジング内に設けられている。
【0015】
本発明によれば、スーパーインポーズステアリングは、プラネタリギヤをスーパーインポーズギヤとして備え、ロックユニットは、電気操作可能であり、電源の故障又は妥当性の故障のような故障が発生した場合に、噛合い係合による結合部を介して、好ましくはセレーションを介してプラネタリキャリヤハウジングをロックする。
【0016】
本発明によれば、スーパーインポーズステアリングは、分割されたステアリングコラムに組み込むことによって、油圧又は電気油圧式のパワーステアリングに統合されている。換言すれば、スーパーインポーズステアリングのスーパーインポーズ機能のための手段が、「通常」の油圧又は電気油圧式のパワーステアリングに、ステアリングコラムへの「スーパーインポーズ機能モジュール」として統合されているということである。
【発明を実施するための最良の形態】
【0017】
実施例及び図面(図1〜図18)を基にして、本発明を模範的に詳細に説明する。
【0018】
21は、好ましくは予組立て及び試験された個々に操作可能な構造群であり、プライマリギヤハウジング43に、内部リング44によって噛合い係合及び摩擦係合するように軸方向に組み立てられる。ロックユニット21を組み立てる場合、同時に内部又は外部の回路(図14の破線62)への統合された操作磁石46の接続45が行なわれる。
【0019】
本発明によるスーパーインポーズステアリング(ESAS/Electric Steer Assisted Steering)の適用例を、図1は、概略図で示す。
【0020】
この場合、スーパーインポーズステアリング2のスーパーインポーズギヤ1は、通常のパワーステアリング4の分割されたステアリングコラム3に統合されている。配設された電動モータ5を介入させることによって、スーパーインポーズギヤ1により、増加又は減少された操舵角6を前輪7に発生させることができる(可変操舵角)。可変操舵角は、電動モータ5を制御するコントローラ8によって調整される。コントローラ8には、信号が回転角センサ9,10から供給され、この回転角センサによって、ステアリングコラム3の回転角がスーパーインポーズギヤ1の前後で検出される。スーパーインポーズ(6)によって、確認された走行状況に応じて走行特性と車両力学に積極的に影響を与えることができる。特に、ステアリング操作時に運転者を支援するために、走行力学上のステアリングへの介入を実現することができる。この場合、スーパーインポーズステアリング2は、1つのモジュールとして通常のパワーステアリング4に統合されている。
【0021】
スーパーインポーズステアリング2の本質的な要素は、図2において斜視図で図示されている。
【0022】
スーパーインポーズステアリング2は、本発明によれば電動モータ5を有する本来のスーパーインポーズギヤ1を、モジュール式に構成された主構造群として備える。更に、スーパーインポーズステアリング2には、本質的にモジュール式に構成された別の2つの主構造群が、即ち本質的に通常のステアリングバルブ13と本質的に通常のステアリングギヤ14とが付設されている。
【0023】
図3は、図2に図示したスーパーインポーズステアリング2を、個々の要素又は主構造群が立体的に互いに分離されている図で示す。
【0024】
図4には、図3に図示したスーパーインポーズステアリング2の要素が斜視図で図示されている。
【0025】
図5には、スーパーインポーズステアリングの本質的な要素が横断面図で示されており、図6には、スーパーインポーズステアリングのこれらの個々の要素が、立体的に互いに分離されて横断面図で図示されている。
【0026】
個々に操作可能な構造群もしくはモジュールとしての個々の要素(1と5,13,14)の構造によって、これらの構造群は、その基礎機能を個々に試験可能であり、軸方向(矢印15参照)にスーパーインポーズステアリング2のシステム全体を構成するように組立て可能である。
【0027】
これは、ステアリングシステムのシリーズ製造において利点を提供する。何故なら、モジュール式に構成することによって、予め試験された構造群の最終組立てが可能であるからである。加えて、スーパーインポーズギヤ1の中心ユニットは、このモジュール式の構成を選択することによって、容易に既存の油圧ステアリングシステム4に統合することができる。
【0028】
統合された本発明によるスーパーインポーズギヤ1の構造上の構成と、駆動コンセプトと安全コンセプトとを以下で説明する。
【0029】
この場合、本発明によれば、駆動コンセプトと安全のコンセプトとの分離が行なわれる。これにより、有利に高いシステム力学を得ることができ、これは、特にESP IIのような改善された走行力学コントロールのために使用可能である。
【0030】
先ず、スーパーインポーズギヤの構成と機能を詳細に説明する(図7及び図8参照)。
【0031】
スーパーインポーズギヤ1自体の構造群は、2つのモジュール式の構造群を、即ちセカンダリギヤ16とプライマリギヤ17を備える。これは、スーパーインポーズギヤ1の簡単な軸方向の組立て(矢印61)を可能にする。
【0032】
プライマリギヤ17は、統合されたロックユニット21を備える。故障が生じた場合のスーパーインポーズギヤ1のロックは、噛合い係合により結合されて同調する電気操作されるロックユニット21を介して行なわれる。このロックユニットは、個々に操作可能な構造群としても構成することができる。噛合い係合による結合は、ここではセレーション20を介して行なわれる。ロックは、プラネタリキャリヤハウジング19をブロックし、これによりロックすることによって行なわれる。電気操作されるロックユニット(21)は、好ましくは通電された状態で開放している。
【0033】
セカンダリギヤ16は、図9及び図10に詳細に示されている。以下では「ダイオード機能」とも呼ばれるセルフロック式のギヤのその機能は、図11〜図13によって図示されている。
【0034】
セカンダリギヤ16は、本質的に駆動モータ、即ち電動モータ5と、平歯車又はベルト駆動ホイール23と、セカンダリギヤハウジング33と、プライマリギヤ駆動ユニット24とから成る。
【0035】
プライマリギヤ駆動ユニット24は、本質的に駆動ホイール25と、フリーホイールスプリング26と、狭持体スプリング27と、狭持体28と、狭持及び支承リング29と、プライマリギヤのカップリング30と、セカンダリギヤベアリング31と、狭持斜面32とから成る。
【0036】
セカンダリギヤ16は、予組立てされた試験可能なユニットであり、プライマリギヤユニット17を組み立てた後駆動トルク34をプライマリギヤのカップリング30によってプラネタリギヤ18に伝達する。
【0037】
プライマリギヤ駆動ユニット24の機能を以下で説明する。
【0038】
操舵トルク(35,図1〜図3参照)のノミナル領域では、好ましくは約5〜10Nmの操舵トルク領域では、要求されるスーパーインポーズ角がセカンダリギヤ16及びプライマリギヤ17によってステアリングバルブ13に、最終的にステアリングギヤ14に静的及び動的に伝達されるように、駆動モータ5のモータ駆動トルク36が設定されている。これは、反作用トルク37がモータ駆動トルク36(例1,図11参照)よりも小さいことを意味する。
【0039】
調達される操舵トルク(35,図1〜図3)がノミナル領域から外れた場合、これは、操舵トルクが約10Nmより大きいことを意味するが、モータトルク36は、プライマリギヤ17及びセカンダリギヤ16を介して発生される反作用トルク37を支持できず、この場合にはモータ5を逆回転させる。即ち、この場合には、反作用トルク37は、モータ駆動トルク36(例3,図13参照)よりも大きい(>)。これは、要求される操舵運動がもはやステアリングギヤ14に伝達されないという結果を伴う。調達された操舵トルク35は、例えば縁石の角で操舵運動を行なうテストの場合のような誤用時に、ノミナル領域から外れてしまう。プライマリギヤ駆動ユニット24に有利に構造上統合された、ここではいわゆる「ダイオード機能」は、反作用トルク37がモータ駆動トルク36よりも大きい(>)場合を意味する過負荷時のプライマリギヤ駆動ユニット14のこの逆回転を防止する。
【0040】
このいわゆる「ダイオード機能」を、以下で説明する(図11〜図13参照)。
【0041】
「ダイオード機能」は、プライマリギヤ駆動ユニット24内に統合されており、両側に作用するトルク制御されたフリーホイールによって実現される。
【0042】
ノミナル領域では、「ダイオード機能」は作動していない。ここでは、反作用トルク37は、フリーホイール作動トルク38よりも小さく(<)、モータ駆動トルク36よりも小さい(<)(例1,図11参照)。
【0043】
この場合には、モータ5によって発生されるモータ駆動トルク36は、アウトプットホイール25と予緊張されたフリーホイールスプリング26を介してプライマリギヤのカップリング30に伝達される。フリーホイールスプリング26の予緊張が得られることによって、一定のフリーホイール作動トルク38以下では、アウトプットホイール25とプライマリギヤのカップリング30間で相対回転運動が何ら行なわれない。この場合、狭持体28は、狭持体スプリング27によってプライマリギヤのカップリング30に統合された狭持斜面32に押し付けられ、噛合い係合することなく、セカンダリギヤハウジング33上に圧入されている狭持及び支承リング29へと回転が同調する。
【0044】
ノミナル領域外で、ダイオード機能が作動している。ここで、反作用トルク37は、フリーホイール作動トルク38以下(=<)であり、モータ駆動トルク36よりも小さい(<)(例2,図12参照)。
【0045】
この場合、モータ5によって発生されるモータ駆動トルク36は、フリーホイール作動トルク38を上回り、これにより「ダイオード機能」を作動させる。この場合、駆動ホイール25とプライマリギヤのカップリング30間に相対回転運動が生じ、噛合い係合による当接40が生じる。同時に、狭持体28は、統合された狭持体スプリング27によって狭持斜面32と狭持及び支承リング29間に当接41させられる。これは、「ダイオード機能」がアクティブに切り換えられており、駆動モータ5がその最大限に可能なモータ駆動トルク36に至るまでプライマリギヤ17を駆動することができることを意味する。
【0046】
過負荷領域で、「ダイオード機能」はアクティブである。この領域では、反作用トルク37は、フリーホイール作動トルク38よりも大きく(>)、モータ駆動トルク36よりも大きい(>)(例3,図13参照)。
【0047】
この場合、反作用トルク37は、モータ5によって発生されるモータ駆動トルク36とフリーホイール作動トルクを上回る。この場合は、スーパーインポーズステアリング2のノミナル作動状態外にあり、例えば縁石での発進によって生じさせることができる。
【0048】
反作用トルク37による駆動モータ5の逆回転は、プライマリギヤのカップリング30と狭持及び支承リング29間に挟まれる狭持体28によって防止される。これは、プライマリギヤ17が機械的にセカンダリギヤハウジング33にロックされることを意味する。プライマリギヤ17の機械的なロックによって、ノミナル操舵領域外で、即ち誤用時に、調整運動は、ロックユニット21を作動させることなくステアリングギヤ12に伝達することができる。
【0049】
セカンダリギヤ16に統合された「ダイオード機能」は、その機械的な特性によって、例えばセカンダリギヤのようなセルフロック式のギヤを形成する。しかしながら、セカンダリギヤ16に統合された「ダイオード機能」は、セルフロック式のギヤとは対照的に、本質的に自由であり、幾何学的な境界条件に依存せずに形成することができる。
【0050】
電気操作されるロックユニット21を以下で詳細に説明する(図12〜図16参照)。
【0051】
前記のように、平行に同調するロックユニット21は、例えばセレーション20のような噛合い係合による結合を介して、故障(電源の故障、妥当性の故障)が生じた場合にプラネタリキャリヤハウジング19をロックする。従って、コントロールされないスーパーインポーズへの介入は、機械的に防止される。車両の操舵性は、普通のステアリングギヤレシオによって維持されたままである。
【0052】
ロックユニット21は、好ましくは予組立て及び試験された個々に操作可能な構造群であり、プライマリギヤハウジング43に、内部リング44によって噛合い及び摩擦係合により軸方向に組み立てられている。ロックユニット21を組み立てる際には、同時に内部又は外部の回路(図14の破線62)への統合された操作磁石46の接続45を行なうことができる。
【0053】
スーパーインポーズステアリングの標準機能を、以下で詳細に説明する。
【0054】
スーパーインポーズステアリング2の標準機能において、操作磁石46は通電されている。この場合、操作磁石46の操作タペット47は、操作リング48をバネ力50に抗して機械的なストッパ51に押し付ける。バネ力50は、重複して構成された圧縮バネ49によって発生される。自由に切り換えられるこの位置で、操作リング48内で噛合い係合により、統合された圧縮バネ52によって摩擦係合により拘束された狭持体53は、内部リング44に統合された狭持斜面55の下の支承点54に押し付けられる。従って、内部リング44上で軸受部56によって支承され、セレーションを切られ、プラネタリキャリヤハウジング19によって共に牽引される外部リング57は、自由に回転することができる。
【0055】
ロックユニット21のアクティブでない機能又は機能不良の状態を、以下で詳細に説明する。
【0056】
スーパーインポーズステアリング2のアクティブでない機能又は機能不良の状態では、操作磁石46は無通電状態であり、これは、操作磁石が通電されないことを意味する。圧縮バネ49によって発生されるバネ力50は、操作磁石46の無力な操作タペット47と操作リング48とを、外部リング57内で拘束されたスラストリング58の端面に押し付ける。
【0057】
操作リング48とスラストリング58の両端面59は歯切りされており、これにより、高い操作トルクが、加わっているバネ力50によってプラネタリキャリヤハウジング/外部リング/スラストリング(19/57/58)が回転する際に操作リング48に伝達される。
【0058】
プラネタリキャリヤハウジング/外部リング/スラストリング(19/57/58)を回転させ、バネ力50によって操作トルクが生じた場合、狭持体53が拘束された操作リング48は、回転運動に移され、狭持体53を、内側60を溝切りされた外部リング57と狭持斜面55間で噛合い係合による狭持位置に移動させる。
【0059】
プラネタリキャリヤハウジング19のコントロールされない捩れが防止され、これにより、スーパーインポーズ機能のロックが得られる。
【0060】
前記実施形において図示された駆動コンセプトと安全コンセプトの分離は、本発明によるスーパーインポーズギヤ1の本質的な特徴である。この分離によって、プラネタリギヤ18の駆動機構として平行に配設されたセカンダリギヤ16のダイナミックな設計及び最適化に関して大きな自由が得られる。
【図面の簡単な説明】
【0061】
【図1】通常の油圧パワーステアリングに構成された本発明によるスーパーインポーズステアリングを示す。
【図2】スーパーインポーズステアリングの本質的な要素を斜視図で示す。
【図3】スーパーインポーズステアリングの個々の、即ち互いに分離された要素を示す。
【図4】図3に図示した要素を斜視図で示す。
【図5】スーパーインポーズステアリングの本質的な要素を横断面図で示す。
【図6】スーパーインポーズステアリングの個々の、即ち互いに分離された要素を横断面図に示す。
【図7】スーパーインポーズギヤの2つのモジュール式構造群を示す。
【図8】個々の、即ち互いに分離された要素としてスーパーインポーズギヤの2つのモジュール式構造群を示す。
【図9】スーパーインポーズギヤのセカンダリギヤ構造群からの部分図を示す。
【図10】セカンダリギヤの個々の、即ち互いに分離された要素を横断面図に示す。
【図11】ギヤの、即ちスーパーインポーズアクチュエータ(電動モータ)の、ノミナル負荷領域にある状態でスーパーインポーズギヤのセカンダリギヤ構造群からの部分図を示す。
【図12】ノミナル負荷領域の限界領域の状態でスーパーインポーズギヤのセカンダリギヤ構造群からの部分図を示す。
【図13】内部でスーパーインポーズアクチュエータ(電動モータ)が非常に大きな力もしくはトルクを発生させる、過負荷領域にある状態でスーパーインポーズギヤのセカンダリギヤ構造群からの部分図を示す。
【図14】ロックユニットを拡大図で示す。
【図15】「開放」状態のロックユニットからの第1の部分図を示す。
【図16】「開放」状態のロックユニットからの第2の部分図を示す。
【図17】「閉鎖」状態のロックユニットからの第1の部分図を示す。
【図18】「閉鎖」状態のロックユニットからの第2の部分図を示す。
【符号の説明】
【0062】
1 スーパーインポーズギヤ
2 スーパーインポーズステアリング
3 ステアリングコラム
4 パワーステアリング
5 電動モータ
6 操舵角
7 前輪
8 コントローラ
9 回転角センサ
10 回転角センサ
13 ステアリングバルブ
14 ステアリングギヤ
15 軸方向
16 セカンダリギヤ
17 プラマリギヤ
18 プラネタリギヤ
19 プラネタリキャリヤハウジング
20 セレーション
21 ロックユニット
23 平歯車又はベルト駆動ホイール
24 プライマリギヤ駆動ユニット
25 駆動ホイール
26 フリーホイールスプリング
27 狭持体スプリング
28 狭持体
29 狭持及び支承リング
30 プライマリギヤのカップリング
31 セカンダリギヤベアリング
32 狭持斜面
33 セカンダリギヤハウジング
34 駆動トルク
35 操舵トルク
36 モータ駆動トルク
37 反作用トルク
38 フリーホイール作動トルク
40 当接
41 当接
43 プライマリギヤハウジング
44 内部リング
45 接続
46 操作磁石
47 操作タペット
48 操作リング
49 圧縮バネ
50 バネ力
51 ストッパ
52 圧縮バネ
53 狭持体
54 支承点
55 狭持斜面
56 軸受部
57 外部リング
58 スラストリング
59 端面
60 内側
61 軸方向の組立て
62 回路
【特許請求の範囲】
【請求項1】
運転者によって入力される操舵角に、必要な場合に別の角度をスーパーインポーズすることができるスーパーインポーズステアリングにおいて、
スーパーインポーズステアリングのスーパーインポーズ機能が、個々に操作可能な構造群によって実現されることを特徴とするスーパーインポーズステアリング。
【請求項2】
スーパーインポーズギヤでは、駆動機能が駆動機能モジュールによって、安全機能が駆動機能モジュールから分離された安全機能モジュールによって実現されることを特徴とする請求項1に記載のスーパーインポーズステアリング。
【請求項3】
スーパーインポーズステアリングが、少なくとも1つのセカンダリギヤモジュール(16)とプライマリギヤモジュール(17)とを個々に操作可能な2つの構造群として備えるスーパーインポーズギヤを備えることを特徴とする請求項1又は2に記載のスーパーインポーズステアリング。
【請求項4】
セカンダリギヤモジュール(16)が、駆動モータ(5)と、平歯車又はベルト駆動機構(23)と、プライマリギヤ駆動ユニット(24)とを備えることを特徴とする請求項3に記載のスーパーインポーズステアリング。
【請求項5】
プライマリギヤ駆動ユニット(24)が、両側に作用するトルク制御されるフリーホイールを備え、このフリーホイールが、操舵トルクのノミナル領域(25)では、要求されたスーパーインポーズ角を、セカンダリギヤ(16)とプライマリギヤ(17)とによってスーパーインポーズステアリングのステアリングギヤ(14)に伝達し、過負荷時で、調達された操舵トルク(35)がノミナル領域外に出た場合には、プライマリギヤ駆動ユニット(24)の逆回転を防止する手段を備えることを特徴とする請求項4に記載のスーパーインポーズステアリング。
【請求項6】
プライマリギヤ駆動ユニット(24)が、アウトプットホイール(25)と、フリーホイールスプリング(26)と、狭持体スプリング(27)と、狭持体(28)と、狭持及び支承リング(29)と、プライマリギヤのカップリング(30)と、セカンダリギヤベアリング(31)と、狭持斜面(32)とを備えることを特徴とする請求項4又は5に記載のスーパーインポーズステアリング。
【請求項7】
プライマリギヤモジュール(17)が、プラネタリギヤユニット(18)とロックユニット(21)とを備えることを特徴とする請求項4〜6のいずれか1つに記載のスーパーインポーズステアリング。
【請求項8】
ロックユニット(21)として、故障時にスーパーインポーズギヤ(1)をロックするための手段を備える個々に操作可能な構造群が、プライマリギヤもしくはプライマリギヤハウジング(4)内に設けられていることを特徴とする請求項8に記載のスーパーインポーズステアリング。
【請求項9】
スーパーインポーズステアリングが、プラネタリギヤをスーパーインポーズギヤとして備え、ロックユニット(21)が、電気操作可能であり、故障が発生した場合に、噛合い係合による結合部を介して、好ましくはセレーション(20)を介してプラネタリキャリヤハウジング(19)をロックすることを特徴とする請求項7又は8に記載のスーパーインポーズステアリング。
【請求項10】
スーパーインポーズステアリングが、分割されたステアリングコラムに組み込むことによって、油圧又は電気油圧式のパワーステアリングに統合されていることを特徴とする請求項1〜9のいずれか1つに記載のスーパーインポーズステアリング。
【請求項1】
運転者によって入力される操舵角に、必要な場合に別の角度をスーパーインポーズすることができるスーパーインポーズステアリングにおいて、
スーパーインポーズステアリングのスーパーインポーズ機能が、個々に操作可能な構造群によって実現されることを特徴とするスーパーインポーズステアリング。
【請求項2】
スーパーインポーズギヤでは、駆動機能が駆動機能モジュールによって、安全機能が駆動機能モジュールから分離された安全機能モジュールによって実現されることを特徴とする請求項1に記載のスーパーインポーズステアリング。
【請求項3】
スーパーインポーズステアリングが、少なくとも1つのセカンダリギヤモジュール(16)とプライマリギヤモジュール(17)とを個々に操作可能な2つの構造群として備えるスーパーインポーズギヤを備えることを特徴とする請求項1又は2に記載のスーパーインポーズステアリング。
【請求項4】
セカンダリギヤモジュール(16)が、駆動モータ(5)と、平歯車又はベルト駆動機構(23)と、プライマリギヤ駆動ユニット(24)とを備えることを特徴とする請求項3に記載のスーパーインポーズステアリング。
【請求項5】
プライマリギヤ駆動ユニット(24)が、両側に作用するトルク制御されるフリーホイールを備え、このフリーホイールが、操舵トルクのノミナル領域(25)では、要求されたスーパーインポーズ角を、セカンダリギヤ(16)とプライマリギヤ(17)とによってスーパーインポーズステアリングのステアリングギヤ(14)に伝達し、過負荷時で、調達された操舵トルク(35)がノミナル領域外に出た場合には、プライマリギヤ駆動ユニット(24)の逆回転を防止する手段を備えることを特徴とする請求項4に記載のスーパーインポーズステアリング。
【請求項6】
プライマリギヤ駆動ユニット(24)が、アウトプットホイール(25)と、フリーホイールスプリング(26)と、狭持体スプリング(27)と、狭持体(28)と、狭持及び支承リング(29)と、プライマリギヤのカップリング(30)と、セカンダリギヤベアリング(31)と、狭持斜面(32)とを備えることを特徴とする請求項4又は5に記載のスーパーインポーズステアリング。
【請求項7】
プライマリギヤモジュール(17)が、プラネタリギヤユニット(18)とロックユニット(21)とを備えることを特徴とする請求項4〜6のいずれか1つに記載のスーパーインポーズステアリング。
【請求項8】
ロックユニット(21)として、故障時にスーパーインポーズギヤ(1)をロックするための手段を備える個々に操作可能な構造群が、プライマリギヤもしくはプライマリギヤハウジング(4)内に設けられていることを特徴とする請求項8に記載のスーパーインポーズステアリング。
【請求項9】
スーパーインポーズステアリングが、プラネタリギヤをスーパーインポーズギヤとして備え、ロックユニット(21)が、電気操作可能であり、故障が発生した場合に、噛合い係合による結合部を介して、好ましくはセレーション(20)を介してプラネタリキャリヤハウジング(19)をロックすることを特徴とする請求項7又は8に記載のスーパーインポーズステアリング。
【請求項10】
スーパーインポーズステアリングが、分割されたステアリングコラムに組み込むことによって、油圧又は電気油圧式のパワーステアリングに統合されていることを特徴とする請求項1〜9のいずれか1つに記載のスーパーインポーズステアリング。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】

【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公表番号】特表2007−500652(P2007−500652A)
【公表日】平成19年1月18日(2007.1.18)
【国際特許分類】
【出願番号】特願2006−530209(P2006−530209)
【出願日】平成16年5月19日(2004.5.19)
【国際出願番号】PCT/EP2004/050863
【国際公開番号】WO2004/103799
【国際公開日】平成16年12月2日(2004.12.2)
【出願人】(399023800)コンティネンタル・テーベス・アクチエンゲゼルシヤフト・ウント・コンパニー・オッフェネ・ハンデルスゲゼルシヤフト (162)
【Fターム(参考)】
【公表日】平成19年1月18日(2007.1.18)
【国際特許分類】
【出願日】平成16年5月19日(2004.5.19)
【国際出願番号】PCT/EP2004/050863
【国際公開番号】WO2004/103799
【国際公開日】平成16年12月2日(2004.12.2)
【出願人】(399023800)コンティネンタル・テーベス・アクチエンゲゼルシヤフト・ウント・コンパニー・オッフェネ・ハンデルスゲゼルシヤフト (162)
【Fターム(参考)】
[ Back to top ]