
セルラー式移動無線測位システム
【課題】移動端末の1次元〜3次元の何れかの次元の位置を高精度で測位する装置を安価に実現する。
【解決手段】移動端末103から起点信号を含む無線信号をバースト信号として間欠発信し、セル毎もしくはセクタ毎に配置された複数の無線マーカ101a、101bからは、再生した起点信号と高精度に同期を確立した距離測定信号と、方向を測定するための方向測定信号とを含む無線信号を、複数の指向性アンテナ21aa〜21bdを周期的に切替えながら時分割で発信し、前記移動端末103において、前記距離測定信号の位相を測定して複数の無線マーカ101a、101bからの距離を算出し、前記複数のアンテナ21aa〜21bdに対応した方向測定信号の位相差を測定して複数の無線マーカ101a、101bが位置する方向を算出することによって、前記移動端末103の1次元〜3次元の何れかの次元の位置を高精度で測位する。
【解決手段】移動端末103から起点信号を含む無線信号をバースト信号として間欠発信し、セル毎もしくはセクタ毎に配置された複数の無線マーカ101a、101bからは、再生した起点信号と高精度に同期を確立した距離測定信号と、方向を測定するための方向測定信号とを含む無線信号を、複数の指向性アンテナ21aa〜21bdを周期的に切替えながら時分割で発信し、前記移動端末103において、前記距離測定信号の位相を測定して複数の無線マーカ101a、101bからの距離を算出し、前記複数のアンテナ21aa〜21bdに対応した方向測定信号の位相差を測定して複数の無線マーカ101a、101bが位置する方向を算出することによって、前記移動端末103の1次元〜3次元の何れかの次元の位置を高精度で測位する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、複数の無線マーカと移動端末との間の、同一周波数による時分割通信によって、移動端末の1次元〜3次元の何れかの次元の位置を高精度で測位することを可能とするものである。
【背景技術】
【0002】
従来から、複数の発信手段を用いて測位を行なうシステムが提案されている。(例えば、特許文献1〜3参照)
【特許文献1】特開2005−083888号
【特許文献2】特開2006−023261号
【特許文献3】特開2008−139292号公報
【0003】
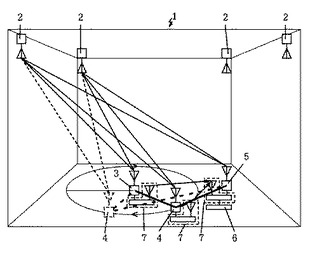
図8は、特許文献1に記載されている従来の「RTK測位システム及びその測位方法」の実施例である。
図8において、1は、RTK(リアルタイムキネマティック)測位を利用して利用者の測位を行うRTK測位システムである。
このRTK測位システム1は、4基のスードライト2と、固定基準局受信手段3と移動基準局受信手段4とからなる2基の基準局受信手段と、ローバー受信手段5と、利用者処理ユニット6と、データリンク7とにより構成されている。ここで、スードライト2は、衛星の代わりの信号源として使用され、利用者の3次元測位を行う場合は、少なくとも4基必要であり、2次元測位を行う場合は、少なくとも3基が必要であるとされている。
【0004】
上記のように、従来の「RTK測位システム及びその測位方法」では3次元の測位を行なうために少なくとも4基のスードライト(擬似衛星局)が必要であり、更に、利用者処理ユニット6の他に、固定基準局受信手段3と移動基準局受信手段4とからなる2基の基準局受信手段と、ローバー受信機5と、データリンク7が必要であることから、システムが複雑であり、取り扱いが煩雑であり、高価となる問題点があった。
【0005】
一方、特許文献2に記載されている従来の「アクティブタグ装置」では、発信手段1の指向性アンテナの方向31に対向して受信手段2の指向性アンテナ21aと21bを向け、発信手段1が高周波信号を発信中に指向性アンテナ21aと21bを切替えた時に受信した高周波信号のタイミングあるいは振幅あるいは周波数あるいは位相あるいはこれらの組合わせの変化をリアルタイムで検知し、当該発信手段1が位置する方向を検知し、当該発信手段1と受信手段2の距離を検知するとされているが、当該発信手段1と受信手段2の距離を検知する手段あるいは方法が明確にされておらず、受信手段2の3次元の位置を測位する旨の訴求がなされていない問題点がある。
【0006】
また、特許文献3に記載されている従来の「移動無線局の位置を決定する測位システム、プログラムおよび位置決定方式」では、移動無線端末の位置を決定するためのより簡単でより小さな構成を実現する。移動無線局(260〜282)の位置を決定する装置(470、370、110、120)は、第1の基準無線局(200〜242)の位置、第2の基準無線局(200〜242)の位置、第3の基準無線局(200〜242)の位置、その移動無線局とその第1の基準無線局の間の第1の相対的角度方向、その移動無線局とその第2の基準無線局の間の第2の相対的角度方向、およびその移動無線局とその第3の基準無線局の間の第3の相対的角度方向から、その移動無線局の位置を決定する手段を具えているが、前記複数の基準無線局からの相対的角度方向のみを測定して測位するものであり、高精度の測位が難しい問題点がある。
【発明の開示】
【発明が解決しようとする課題】
【0007】
この発明は、セル毎もしくはセクタ毎に配置された複数の無線マーカと、移動体に設置されあるいは移動体によって携帯される移動端末との間の、同一周波数による時分割通信によって、移動端末の1次元〜3次元の内の何れかの次元の位置を高精度で測位するためのセルラー式移動無線測位システムを安価に実現するためのものである。
【課題を解決するための手段】
【0008】
この発明に係わるセルラー式移動無線測位システムは、複数の指向性アンテナを搭載して周期的に切替えながら、少なくとも、同期信号と、識別信号と、距離を測定するための距離測定信号と、方向を測定するための方向測定信号とを含む無線信号を、セル毎もしくはセクタ毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で発信する複数の無線マーカと、前記無線信号を受信して1次元〜3次元の何れかの次元の測位を行なうための移動端末とから構成され、前記距離測定信号が、前記移動端末から複数の無線マーカに向けて発信される測位要求信号に含まれる起点信号と、高精度で同期しあるいは直交する搬送波信号、副搬送波信号、変調信号、スペクトル拡散符号、もしくはこれらの組み合わせであり、
【0009】
あるいは、少なくとも、システム同期信号と、識別信号と、距離を測定するための距離測定信号と、方向を測定するための方向測定信号とを含む無線信号を、セル毎もしくはセクタ毎に予め割当てられた周波数、タイムスロット、もしくはこれらの両方で発信する移動端末と、複数の指向性アンテナを搭載して周期的に切替えながら、前記無線信号を受信して1次元〜3次元の内の何れかの次元の測位を行なうための複数の無線マーカとから構成され、前記距離測定信号が、前記複数の無線マーカから移動端末に向けて発信される測位要求信号に含まれる起点信号と、高精度で同期しあるいは直交する搬送波信号、副搬送波信号、変調信号、スペクトル拡散符号、もしくはこれらの組み合わせであり、
【0010】
前記距離測定信号と起点信号とが、瞬時にしかも高精度で同期を確立し、前記起点信号が消滅した後も、比較的に長時間同期を維持できる同期発振手段と、高精度でしかもリアルタイムで位相の測定が可能な位相測定手段とを用い、前記複数の無線マーカの内の少なくとも1つの基地局と移動端末との距離と、お互いが位置する方向を高精度で算出することによって、1次元〜3次元の内の何れかの次元の測位を可能とするよう構成されている。
【発明の効果】
【0011】
本発明のセルラー式移動無線測位システムでは、セル毎もしくはセクタ毎に配置された複数の無線マーカと、移動体に設置されあるいは移動体によって携帯される移動端末との間の、同一周波数による時分割通信によって、移動端末の1次元〜3次元の内の何れかの次元の位置を高精度でしかもリアルタイムで測位するためのシステムを安価に実現できる利点がある。
【発明を実施するための最良の形態】
【0012】
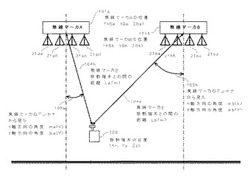
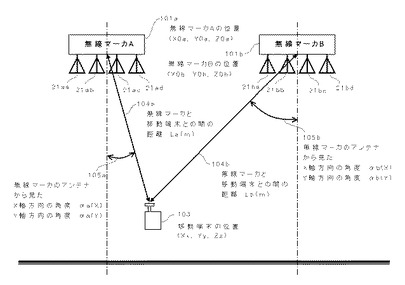
この発明に係わるセルラー式移動無線測位システムは、図1、図2、および請求項1に本発明の第1の実施の形態を示すように、超音波信号あるいは高周波信号あるいは光信号である無線信号を用いるセルラー式移動無線測位システムにおいて、前記無線信号を移動しながら時分割で発信し受信するための移動端末103と、位置の基準となる複数の無線マーカ101a、101bとから構成され、
【0013】
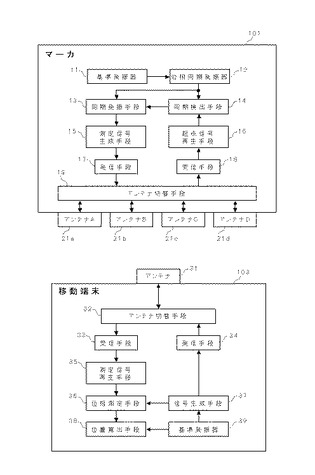
前記移動端末103が、少なくとも、アンテナ切替手段32と、起点信号生成手段37と、発信手段34と、受信手段33と、測定信号再生手段35と、位相測定手段36と、位置算出手段38とを有し、
、
前記アンテナ切替手段32が、アンテナ又は送受波器を発信手段又は受信手段の何れかに時分割で切替え、前記起点信号生成手段37が、少なくとも、システム同期信号と、識別信号と、起点信号を含む測位要求信号とを生成し、前記発信手段34が、前記測位要求信号を含む無線信号を前記複数の無線マーカに向けてバースト信号として発信し、
【0014】
前記受信手段33が、前記複数の無線マーカ101a、101bから発信される無線信号を受信し、前記測定信号再生手段35が、前記受信手段によって受信される無線信号から、距離測定信号と方向測定信号とを再生し、前記位相測定手段36が、前記再生された距離測定信号と方向測定信号との位相を測定し、前記位置算出手段38が、前記位相の測定結果から自局の位置を測位し、
【0015】
前記複数の無線マーカ101a、101bが、少なくとも、アンテナ切替手段19と、受信手段18と、起点信号再生手段16と、同期発振手段13と、測定信号生成手段15と、発信手段17とを有し、
前記アンテナ切替手段19が、複数のアンテナ又は複数の送受波器21a〜21dを周期的に切替え、かつ発信手段又は受信手段の何れかに時分割で切替え、前記受信手段18が、前記移動端末103から発信される測位要求信号を含む無線信号を受信し、前記起点信号再生手段16が、前記受信手段によって受信される無線信号から測位要求信号に含まれる起点信号を再生し、
【0016】
前記同期発振手段13が、前記再生された起点信号と高精度でかつ短時間に同期を確立して同期を保持し、前記測定信号生成手段15が、前記同期発振手段の出力と同期しあるいは直交する距離測定信号と、前記距離測定信号とは別に、方向を測定するための方向測定信号とを生成し、前記発信手段17が、前記距離測定信号と方向測定信号を含む無線信号を、セル毎もしくはセクタ毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、複数のアンテナ又は複数の送受波器を周期的に切替えながら、前記移動端末に向けて時分割で発信し、
【0017】
前記移動端末103から発信される起点信号と、前記複数の無線マーカ101a、101bから発信される距離測定信号と方向測定信号とが、単一もしくは同期しあるいは直交する複数の、搬送波信号、副搬送波信号、変調信号、スペクトル拡散符号、もしくはこれらの組合せであり、前記移動端末103において、前記距離測定信号の位相を測定して前記複数の無線マーカ101a、101bの内の少なくとも1つの無線マーカからの距離を算出し、前記少なくとも1つの無線マーカの複数のアンテナ又は複数の送受波器21a〜21dに対応した方向測定信号の位相差を測定して前記少なくとも1つの無線マーカが位置する方向を算出し、前記距離の算出結果と、方向の算出結果とから、前記移動端末103の1次元〜3次元の内の何れかの次元の位置を高精度で測位する。
【0018】
また、図1、図3、および請求項2に本発明の第2の形態を示すように、超音波信号あるいは高周波信号あるいは光信号である無線信号を用いるセルラー式移動無線測位システムにおいて、前記無線信号を移動しながら時分割で発信し受信するための移動端末103と、セル毎もしくはセクタ毎に配置され位置の基準となる複数の無線マーカ101a、101bとから構成され、
【0019】
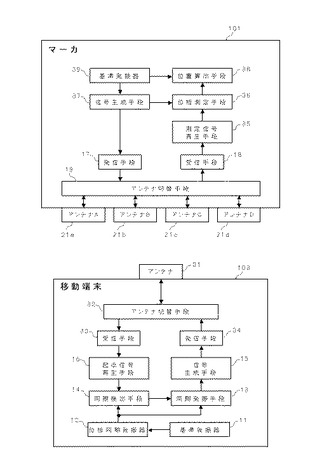
前記複数の無線マーカ101a、101bが、少なくとも、アンテナ切替手段19と、受信手段18と、起点信号生成手段37と、発信手段17と、測定信号再生手段35と、位相測定手段36と、位置算出手段37とを有し、
前記アンテナ切替手段19が、複数の指向性アンテナ又は複数の指向性送受波器21a〜21dを周期的に切替え、かつ発信手段17又は受信手段18の何れかに時分割で切替え、前記受信手段18が、前記移動端末103から発信される測位起動要求信号を受信し、前記起点信号生成手段37が、前記測位起動要求信号に対応して、少なくとも、システム同期信号と、識別信号と、起点信号を含む測位要求信号とを生成し、
【0020】
前記発信手段17が、前記起点信号を含む無線信号を、前記移動端末103に向けて、セル毎もしくはセクタ毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、バースト信号として発信し、前記受信手段18が、前記測位要求信号に応答して前記移動端末103から発信される無線信号を、各セル毎もしくはセクタ毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、複数のアンテナ又は複数の送受波器21a〜21dを周期的に切替えながら、時分割で受信し、前記測定信号再生手段35が、前記受信手段18によって受信される無線信号から、距離測定信号と方向測定信号とを再生し、前記位相測定手段36が、前記再生された距離測定信号と方向測定信号との位相を測定し、前記位置算出手段38が、前記位相の測定結果から移動端末103の位置を測位し、
【0021】
前記移動端末103が、少なくとも、アンテナ切替手段32と、受信手段33と、起点信号再生手段16と、同期発振手段13と、測定信号生成手段15と、発信手段34とを有し、
前記アンテナ切替手段32が、アンテナ又は送受波器31を発信手段34又は受信手段33の何れかに時分割で切替え、前記発信手段34が、少なくとも、システム同期信号と、識別信号と、測位起動要求信号とを生成し、前記測位起動要求信号を含む無線信号を間欠発信し、前記受信手段33が、前記複数の無線マーカ101a、101bから、セル毎もしくはセクタ毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、発信される無線信号を受信し、前記起点信号再生手段15が、前記受信手段33によって受信される無線信号から、前記測位要求信号に含まれる起点信号を再生し、
【0022】
前記同期発振手段13が、前記再生された起点信号と高精度でかつ短時間に同期を確立して同期を保持し、前記測定信号生成手段15が、前記同期発振手段の出力と同期しあるいは直交する距離測定信号と、前記距離測定信号とは別に、方向を測定するための方向測定信号とを生成し、前記発信手段34が、前記距離測定信号と方向測定信号を含む無線信号を、セル毎もしくはセクタ毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、前記複数の無線マーカ101a、101bに向けて時分割で発信し、前記複数の無線マーカ101a、101bから発信される起点信号と、前記移動端末103から発信される距離測定信号と方向測定信号とが、単一もしくは同期しあるいは直交する複数の、搬送波信号、副搬送波信号、変調信号、スペクトル拡散符号、もしくはこれらの組合せであり、
【0023】
前記移動端末103が、前記複数の無線マーカ101a、101bに向けて、少なくとも、システム同期信号と、識別信号と、測位起動要求信号とを含む無線信号をバースト信号として間欠発信し、前記複数の無線マーカ101a、101bが、前記移動端末103から発信された測位起動要求信号に対応し、前記移動端末に向けて、測位要求信号を含む無線信号を、セル毎もしくはセクタ毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、時分割で発信し、前記移動端末103が、前記複数の無線マーカ101a、101bから発信される測位要求信号に対応して、前記複数の無線マーカ101a、101bに向けて、少なくとも前記測位信号と方向測定信号とを含む無線信号を、セル毎もしくはセクタ毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、時分割で発信し、
【0024】
前記複数の無線マーカ101a、101bの内の少なくとも1つの無線マーカにおいて、前記測位信号の位相を測定して移動端末103からの距離を算出し、前記少なくとも1つの無線マーカの複数のアンテナ又は複数の送受波器21a〜21dに対応した方向測定信号の位相差を測定して移動端末103が位置する方向を算出し、前記距離の算出結果と、方向の算出結果とから、前記移動端末103の1次元〜3次元の内の何れかの次元の位置を高精度で測位する。
【0025】
また、請求項3に示すように、前記起点信号再生手段16もしくは測定信号再生手段35において、前記再生する起点信号もしくは測定信号が、無線信号の搬送波信号あるいは副搬送波信号である場合には、群遅延歪みの少ない帯域通過フイルタを通し、あるいは無線信号を変調した変調信号である場合には、遅延誤差の少ないアナログ復調器もしくは高い周波数のクロック信号を用いる遅延誤差の少ないデジタル復調器によって復調した後に、前記帯域通過フイルタを通して再生する。
【0026】
また、請求項4に示すように、前記複数の無線マーカ101a、101bあるいは移動端末103の同期発振手段13が、基準発振器11もしくは位相同期発振器によって駆動されるセットあるいはリセット付きのカウンタあるいは数値制御発振器によって構成され、前記受信機18によって受信され信号再生手段16によって復調されもしくは再生された起点信号の立上がり点、立下がり点、もしくはゼロ交差点のタイミングを、同期検出手段14によって少なくとも16MHz以上の周波数のクロック信号を用いて検出し、前記同期検出手段が検出したタイミングで、前記カウンタあるいは数値制御発振器をセットしもしくはリセットすることによって、前記同期発振手段が起点信号と短時間で同期を確立し、同期を保持できる。
【0027】
また、請求項5に示すように、前記複数の無線マーカ101a、101bあるいは移動端末103の同期発振手段13と、前記復調されもしくは再生された起点信号との間の同期確立誤差を低減し、高精度でかつ短時間に同期を確立させるために、前記移動端末103、前記複数の無線マーカ101a、101b、あるいはこれらの両方に同期確立誤差関数を付与し、前記同期確立誤差関数が前記同期確立誤差を限りなくゼロに近づける。
【0028】
また、図6および請求項6に示すように、前記複数の無線マーカ101a、101bあるいは移動端末103の同期検出手段14に前記同期確立誤差関数を付与するために、前記位相同期発振器23のクロック信号出力の位相をシフトさせるための複数組の移相手段51と、前記複数組の移相手段によって各々異なった位相にシフトされた複数組のクロック信号を選択して外部に出力するためのタイミング制御手段53とを設け、前記移相手段の移相量の合計を、前記クロック信号の一周期の間隔よりも大きく設定することによって、距離の算出精度を向上させる。
【0029】
また、図7および請求項7に示すように、前記複数の無線マーカ101a、101bあるいは移動端末103の同期発振手段13に前記同期確立誤差関数を付与するために、前記同期発振手段が複数組のカウンタあるいは複数組の数値制御発振器92a〜92nを有し、前記複数組のカウンタあるいは複数組の数値制御発振器が、前記再生された起点信号と各々異なった複数のタイミングで切替手段91によって切替えられて同期を確立し、前記複数組のカウンタあるいは複数組の数値制御発振器から出力される出力信号を異なった複数のタイミングで選択手段93によって選択し、前記選択された出力信号に同期しもしくは直交した単一もしくは複数の距離測定信号を生成して前記移動端末103あるいは複数の無線マーカ101a、101bに向けて発信し、前記移動端末あるいは複数の無線マーカの位置算出手段37において、前記複数のタイミングに対応して算出した距離の平均値を求めることによって、距離の算出精度を向上させる。
【0030】
また、請求項8に示すように、前記複数の無線マーカ101a、101bあるいは移動端末103から発信され、あるいは前記複数の無線マーカあるいは移動端末によって受信される起点信号に前記同期確立誤差関数を付与するために、前記無線マーカの複数のアンテナ又は複数の送受波器21a〜21dを周期的に切替ながら、前記起点信号を発信しあるいは受信し、距離の算出精度を向上させる。
【0031】
また、請求項9に示すように、また、前記移動端末103あるいは無線マーカ101a、101bの位相測定手段36が積和演算器を有し、前記積和演算器のSinのルックアップテーブルとして0、1、0、−1、もしくは1、1、−1、−1、もしくはこれらの整数倍の繰り返しとし、Cosのルックアップテーブルとして1、0、−1、0、もしくは1、−1、−1、1、もしくはこれらの整数倍の繰り返しとして積和演算する。なお、積和演算を行う際の1との乗算は前記デジタル信号と同じ値であり、−1との乗算は前記デジタル信号の補数を求めることであり、0との剰算は0であり、前記積和演算器を単純化でき、しかも高速で、リアルタイムの演算が可能となる。
【0032】
また、請求項10に示すように、前記無線マーカの複数のアンテナ又は複数の送受波器21a〜21dが指向性を有し、前記指向性の方向を下方向もしくは斜め下方向もしくは水平方向に向けて、前記方向測定信号の0.5波長から2波長の間隔で配置する。
また、請求項11に示すように、前記セルを更に複数のセクタに分け、前記セクタ毎に無線マーカを設置する。
【0033】
また、請求項12に示すように、前記移動端末103の受信手段33、無線マーカ101の受信手段18、あるいはこれらの両方が、伝搬経路の品質を検知する品質検知手段を有し、前記品質検知手段が、前記受信手段において受信した無線信号の電力あるいは信号対雑音比を測定した結果から回線品質を分析し、前記位相測定手段36で距離測定信号の位相あるいは方向測定信号の位相差を測定した結果から、距離測定精度あるいは方向測定精度を分析し、あるいはこれらの分析の両方を行い、前記距離測定処理、方向測定処理、あるいはこれらの両方の結果を補正しあるいは補完する。
【0034】
また、請求項13に示すように、前記移動端末の受信手段、無線マーカの受信手段、あるいはこれらの両方が、複数のアンテナ又は複数の送受波器を設けて周期的に切替え、前記品質検知手段において、前記複数のアンテナ又は複数の送受波器に対応して距離を測定しあるいは算出した結果の内、距離を比較的に短く算出したものを選択し、平均し、荷重平均を行い、あるいはこれらの組み合わせを行うことによって、前記距離測定結果あるいは距離算出結果を補正しあるいは補完する。
また、請求項14に示すように、前記複数の無線マーカの内の特定の無線マーカをノードとして周辺の無線マーカとの間でアドホックネットワークを構成し、前記ノードを経由して外部の有線回線もしくは無線回線と接続し、少なくとも、前記移動端末の位置を測位するために必要な情報の交換を行なう。
また、請求項15に示すように、前記複数の無線マーカの内の特定の無線マーカ、あるいは前記複数の無線マーカとは別の無線マーカをノードとし、前記移動端末、複数の無線マーカ、あるいはこれらの両方から送信される無線信号を受信し、前記無線信号に含まれる起点信号を基準として、前記無線信号に含まれる距離測定信号の位相を測定し、双曲線航法によって、前記移動端末の位置を測位する。
【0035】
また、請求項16に示すように、前記複数の無線マーカの内の特定の無線マーカ、あるいは前記複数の無線マーカとは別の無線マーカをノードとし、前記移動端末、複数の無線マーカ、あるいはこれらの両方から送信される無線信号を受信し、前記無線信号に含まれる起点信号を基準として、前記無線信号に含まれる距離測定信号の位相を測定し、かつ前記無線信号に含まれる前記移動端末、複数の無線マーカ、あるいはこれらの両方が位置する方向を測定したデータを受信して、前記移動端末の位置を測位する。
また、請求項17に示すように、前記無線信号の周波数として、GPSに割当てられた周波数、あるいはその近傍の周波数を割当て、前記複数の無線マーカから発信される無線信号の占有率を20%以下とすることで、屋外と屋内でGPSをシームレスに接続する。
【0036】
(実施の形態1)
図1、図2は本発明の第1の形態によるセルラー式移動無線測位システムの構成図である。図1、図2に示す超音波信号あるいは高周波信号あるいは光信号である無線信号を用いるセルラー式移動無線測位システムにおいて、前記無線信号を移動しながら時分割で発信し受信するための移動端末103と、セル毎もしくはセクタ毎に配置され位置の基準となる複数の無線マーカ101a、101bとから構成され、
【0037】
前記移動端末103が、少なくとも、アンテナ切替手段32と、起点信号生成手段37と、発信手段34と、受信手段33と、測定信号再生手段35と、位相測定手段36と、位置算出手段38とを有し、
、
前記アンテナ切替手段32が、アンテナ又は送受波器を発信手段又は受信手段の何れかに時分割で切替え、前記起点信号生成手段37が、少なくとも、システム同期信号と、識別信号と、起点信号を含む測位要求信号とを生成し、前記発信手段34が、前記測位要求信号を含む無線信号を前記複数の無線マーカに向けてバースト信号として発信し、
【0038】
前記受信手段33が、前記複数の無線マーカ101a、101bから発信される無線信号を受信し、前記測定信号再生手段35が、前記受信手段によって受信される無線信号から、距離測定信号と方向測定信号とを再生し、前記位相測定手段36が、前記再生された距離測定信号と方向測定信号との位相を測定し、前記位置算出手段38が、前記位相の測定結果から自局の位置を測位し、
【0039】
前記複数の無線マーカ101a、101bが、少なくとも、アンテナ切替手段19と、受信手段18と、起点信号再生手段16と、同期発振手段13と、測定信号生成手段15と、発信手段17とを有し、
前記アンテナ切替手段19が、複数のアンテナ又は複数の送受波器21a〜21dを周期的に切替え、かつ発信手段又は受信手段の何れかに時分割で切替え、前記受信手段18が、前記移動端末103から発信される測位要求信号を含む無線信号を受信し、前記起点信号再生手段16が、前記受信手段によって受信される無線信号から測位要求信号に含まれる起点信号を再生し、
【0040】
前記同期発振手段13が、前記再生された起点信号と高精度でかつ短時間に同期を確立して同期を保持し、前記測定信号生成手段15が、前記同期発振手段の出力と同期しあるいは直交する距離測定信号と、前記距離測定信号とは別に、方向を測定するための方向測定信号とを生成し、前記発信手段17が、前記距離測定信号と方向測定信号を含む無線信号を、セル毎もしくはセクタ毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、指向性の方向が下方向もしくは斜め下方向に向けて前記方向測定信号の0.5波長から2波長の間隔で配置されれた、複数のアンテナ又は複数の送受波器を周期的に切替えながら、前記移動端末に向けて時分割で発信し、
【0041】
前記移動端末103から発信される起点信号と、前記複数の無線マーカ101a、101bから発信される距離測定信号と方向測定信号とが、単一もしくは同期しあるいは直交する複数の、搬送波信号、副搬送波信号、変調信号、スペクトル拡散符号、もしくはこれらの組合せであり、前記移動端末103において、前記距離測定信号の位相を測定して前記複数の無線マーカ101a、101bの内の少なくとも1つの無線マーカからの距離を算出し、前記少なくとも1つの無線マーカの複数のアンテナ又は複数の送受波器21a〜21dに対応した方向測定信号の位相差を測定して前記少なくとも1つの無線マーカが位置する方向を算出し、前記距離の算出結果と、方向の算出結果とから、前記移動端末103の1次元〜3次元の何れかの次元の位置を高精度で測位する。
なお、前記1次元の位置とは、前記無線マーカと移動端末との距離、もしくは前記移動端末が位置する方向を意味する。
【0042】
また、前記起点信号再生手段16もしくは測定信号再生手段35において、前記再生する起点信号もしくは測定信号が、無線信号の搬送波信号あるいは副搬送波信号である場合には、群遅延歪みの少ない帯域通過フイルタ(例えば、ガウシャンフイルタ)を通し、あるいは無線信号を変調した変調信号である場合には、遅延誤差の少ないアナログ復調器もしくは高い周波数のクロック信号を用いる遅延誤差の少ないデジタル復調器によって復調した後に、前記帯域通過フイルタを通して再生する。
【0043】
また、前記複数の無線マーカ101a、101bあるいは移動端末103の同期発振手段13が、基準発振器11もしくは位相同期発振器によって駆動されるセットあるいはリセット付きのカウンタあるいは数値制御発振器によって構成され、前記受信機18によって受信され信号再生手段16によって復調されもしくは再生された起点信号の立上がり点、立下がり点、もしくはゼロ交差点のタイミングを、同期検出手段14によって少なくとも16MHz以上の周波数のクロック信号を用いて検出し、前記同期検出手段が検出したタイミングで、前記カウンタあるいは数値制御発振器をセットしもしくはリセットすることによって、前記同期発振手段が起点信号と短時間で同期を確立し、同期を保持できる。
また、基準発振器11、39には特に高安定のものが必要であり、例えば、±0.5ppm以内のものが用いられる。
【0044】
また、前記複数の無線マーカ101a、101bあるいは移動端末103の同期発振手段13と、前記復調されもしくは再生された起点信号との間の同期確立誤差を低減し、高精度でかつ短時間に同期を確立させるために、前記移動端末103、前記複数の無線マーカ101a、101b、あるいはこれらの両方に同期確立誤差関数を付与し、前記同期確立誤差関数が前記同期確立誤差を限りなくゼロに近づける。
【0045】
また、図6に示すように、前記複数の無線マーカ101a、101bあるいは移動端末103の同期検出手段14に前記同期確立誤差関数を付与するために、前記位相同期発振器23のクロック信号出力の位相をシフトさせるための複数組の移相手段51と、前記複数組の移相手段によって各々異なった位相にシフトされた複数組のクロック信号を選択して外部に出力するためのタイミング制御手段53とを設け、前記移相手段の移相量の合計を、前記クロック信号の一周期の間隔よりも大きく設定することによって、距離の算出精度を向上させる。
【0046】
また、図7に示すように、前記複数の無線マーカ101a、101bあるいは移動端末103の同期発振手段13に前記同期確立誤差関数を付与するために、前記同期発振手段が複数組のカウンタあるいは複数組の数値制御発振器92a〜92nを有し、前記複数組のカウンタあるいは複数組の数値制御発振器が、前記再生された起点信号と各々異なった複数のタイミングで切替手段91によって切替えられて同期を確立し、前記複数組のカウンタあるいは複数組の数値制御発振器から出力される出力信号を異なった複数のタイミングで選択手段93によって選択し、前記選択された出力信号に同期しもしくは直交した単一もしくは複数の距離測定信号を生成して前記移動端末103あるいは複数の無線マーカ101a、101bに向けて発信し、前記移動端末あるいは複数の無線マーカの位置算出手段37において、前記複数のタイミングに対応して算出した距離の平均値を求めることによって、距離の算出精度を向上させる。
【0047】
また、前記複数の無線マーカ101a、101bあるいは移動端末103から発信され、あるいは前記複数の無線マーカあるいは移動端末によって受信される起点信号に前記同期確立誤差関数を付与するために、前記無線マーカの複数のアンテナ又は複数の送受波器21a〜21dを周期的に切替ながら、前記起点信号を発信しあるいは受信し、距離の算出精度を向上させる。
【0048】
また、前記移動端末103あるいは無線マーカ101a、101bの位相測定手段36が積和演算器を有し、前記測位信号および方向測定信号を、例えば8ビット以上のアナログデジタル変換器によってデジタル信号に変換した後に、Sinのルックアップテーブルとして0、1、0、−1、もしくは1、1、−1、−1、もしくはこれらの整数倍の繰り返しとし、Cosのルックアップテーブルとして1、0、−1、0、もしくは1、−1、−1、1、もしくはこれらの整数倍の繰り返しとして積和演算する。なお、積和演算を行う際の1との乗算は前記デジタル信号と同じ値であり、−1との乗算は前記デジタル信号の補数を求めることであり、0との剰算は0であり、前記積和演算器を単純化でき、しかも高速で、リアルタイムの演算が可能となる。
【0049】
また、位置演算の主要な部分である位相測定を前記積和演算器を用いて処理できるので、前記位置算出手段38に要求される処理内容はそれほど大きくなく、通常のマイクロプロセッサを用いて構成することができるメリットが得られる。
また、前記無線マーカの複数のアンテナ又は複数の送受波器21a〜21dが指向性を有し、前記指向性の方向を下方向もしくは斜め下方向もしくは水平方向に向けて、前記方向測定信号の0.5波長から2波長の間隔で配置する。
また、前記セルを更に複数のセクタに分け、前記セクタ毎に無線マーカを設置する。
【0050】
また、前記移動端末103の受信手段33、複数の無線マーカ101a、101bの受信手段18、あるいはこれらの両方が、伝搬経路の品質を検知する品質検知手段を有し、前記品質検知手段が、前記受信手段において受信した無線信号の電力あるいは信号対雑音比を測定した結果から回線品質を分析し、前記位相測定手段36で距離測定信号の位相あるいは方向測定信号の位相差を測定した結果から、距離測定精度あるいは方向測定精度を分析し、あるいはこれらの分析の両方を行い、前記距離測定処理、方向測定処理、あるいはこれらの両方の結果を補正しあるいは補完する。
【0051】
また、前記移動端末の受信手段、無線マーカの受信手段、あるいはこれらの両方が、複数のアンテナ又は複数の送受波器を設けて周期的に切替え、前記品質検知手段において、前記複数のアンテナ又は複数の送受波器に対応して距離を測定しあるいは算出した結果の内、距離を比較的に短く算出したものを選択し、平均し、荷重平均を行い、あるいはこれらの組み合わせを行うことによって、前記距離測定結果あるいは距離算出結果を補正しあるいは補完する。
また、前記無線信号の周波数として、GPSに割当てられた周波数、あるいはその近傍の周波数を割当て、前記複数の無線マーカから発信される無線信号の占有率を20%以下とすることで、屋外と屋内でGPSをシームレスに接続する。
【0052】
前記無線マーカが単一の場合に、距離の算出結果を距離(Lm)、方向の算出結果を方向(α(X)、α(Y))とすると、前記距離(Lm)と、方向(α(X)、α(Y))との測定結果から、次のように、移動端末の2次元もしくは3次元の位置を求めることができる。
(1)無線マーカの複数のアンテナ21a〜21dが下方を向いている場合
Xx=X0−L*Sin(α(X)) −−−−(1)
Yy=Y0−L*Sin(α(Y)) −−−−(2)
Zz=Z0−L*√(1−Sin^2(α(X))−Sin^2(α(Y))−−−−(3)
【0053】
(2)無線マーカの複数のアンテナ21a〜21dがβ(Y)傾いている場合
Xx=X0−L*Sin(α(X)) −−−−(4)
Yy=Y0−L*Sin{(α(Y))+(β(Y))} −−−−(5)
Zz=Z0−L*√(1−Sin^2(α(X))−Sin^2(γ(Y))−−−−(6)
ただし、γ(Y)=α(Y)+β(Y) < 90°とする。
【0054】
ここで、前記距離測定信号が1MHzの場合、距離の測定レンジが150mとなり、前記距離測定信号の位相が最大360°となるので、位相差を検出することによって相対距離が高精度で測定できる。
また、前記位相差の測定精度が±0.5°程度が実現できるので、相対距離の測定誤差として±150m×(0.5/360°)=±21cm程度が実現できる。
なお、無線マーカが複数の場合には、移動端末103から発信される測位要求信号を含む無線信号を、前記複数の無線マーカ101a、101bが受信すると、前記距離測定信号と方向測定信号を含む無線信号を、セル毎もしくはセクタ毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、複数のアンテナ又は複数の送受波器21a〜21dを周期的に切替えながら、前記移動端末103に向けて時分割で発信することで、前記移動端末103の位置を高精度で測位する。
【0055】
また、無線マーカに2基のアンテナを設けて周期的に切替えることによって、1次元もしくは2次元の位置を測位することも可能である。
また、前記複数の無線マーカ101a、101bが、擬似衛星局(スードライト)であり、前記擬似衛星局から発信される無線信号が、時間率20%以下の短いバースト信号である場合、遠近問題が生じず、したがって、発信可能な電力を1mW程度まで高めることが可能である。
また、単一の無線マーカを利用しても、1次元〜3次元の何れかの次元の測位が可能なことから、従来の擬似衛星局4局を利用して双曲線航法により1次元〜3次元の何れかの次元の測位を行なう場合に比較して、マルチパスによる影響を軽減することができる。
【0056】
また、前記複数の無線マーカ101a、101bを離散的に配置する場合、少なくとも1局の発信手段が見通せれば1次元〜3次元の何れかの次元の測位が可能となることから、経済的なシステム設計が可能となる。
また、前記セルを更に複数のセクタに分け、前記セクタ毎に無線マーカを設置することで、高精度の測位システムを実現できる。
また、前記移動端末にも方向測定信号の0.5波長から2波長の間隔で複数の指向性アンテナを接続し、周期的に切替ながら距離の算出、方向の算出、あるいはこれらの両方を行なうことで、マルチパスによる影響を軽減することができる。
【0057】
(実施の形態2)
図1、図3は本発明の第2の形態によるセルラー式移動無線測位システムの構成図である。図1、図3に示す超音波信号あるいは高周波信号あるいは光信号である無線信号を用いるセルラー式移動無線測位システムにおいて、前記無線信号を移動しながら時分割で発信し受信するための移動端末103と、位置の基準となる複数の無線マーカ101a、101bとから構成され、
【0058】
前記複数の無線マーカ101a、101bが、少なくとも、アンテナ切替手段19と、受信手段18と、起点信号生成手段37と、発信手段17と、測定信号再生手段35と、位相測定手段36と、位置算出手段37とを有し、
前記アンテナ切替手段19が、複数の指向性アンテナ又は複数の指向性送受波器21a〜21dを周期的に切替え、かつ発信手段17又は受信手段18の何れかに時分割で切替え、前記受信手段18が、前記移動端末103から発信される測位起動要求信号を受信し、前記起点信号生成手段37が、前記測位起動要求信号に対応して、少なくとも、システム同期信号と、識別信号と、起点信号を含む測位要求信号とを生成し、
【0059】
前記発信手段17が、前記起点信号を含む無線信号を、前記移動端末103に向けて、セル毎もしくはセクタ毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、バースト信号として発信し、前記受信手段18が、前記測位要求信号に応答して前記移動端末103から発信される無線信号を、各セル毎もしくはセクタ毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、指向性の方向が下方向もしくは斜め下方向に向けて前記方向測定信号の0.5波長から2波長の間隔で配置された、複数のアンテナ又は複数の送受波器21a〜21dを周期的に切替えながら、時分割で受信し、前記測定信号再生手段35が、前記受信手段18によって受信される無線信号から、距離測定信号と方向測定信号とを再生し、前記位相測定手段36が、前記再生された距離測定信号と方向測定信号との位相を測定し、前記位置算出手段38が、前記位相の測定結果から移動端末103の位置を測位し、
【0060】
前記移動端末103が、少なくとも、アンテナ切替手段32と、受信手段33と、起点信号再生手段16と、同期発振手段13と、測定信号生成手段15と、発信手段34とを有し、
前記アンテナ切替手段32が、アンテナ又は送受波器31を発信手段34又は受信手段33の何れかに時分割で切替え、前記発信手段34が、少なくとも、システム同期信号と、識別信号と、測位起動要求信号とを生成し、前記測位起動要求信号を含む無線信号を間欠発信し、前記受信手段33が、前記複数の無線マーカ101a、101bから、セル毎もしくはセクタ毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、発信される無線信号を受信し、前記起点信号再生手段15が、前記受信手段33によって受信される無線信号から、前記測位要求信号に含まれる起点信号を再生し、
【0061】
前記同期発振手段13が、前記再生された起点信号と高精度でかつ短時間に同期を確立して同期を保持し、前記測定信号生成手段15が、前記同期発振手段の出力と同期しあるいは直交する距離測定信号と、前記距離測定信号とは別に、方向を測定するための方向測定信号とを生成し、前記発信手段34が、前記距離測定信号と方向測定信号を含む無線信号を、セル毎もしくはセクタ毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、前記複数の無線マーカ101a、101bに向けて時分割で発信し、前記複数の無線マーカ101a、101bから発信される起点信号と、前記移動端末103から発信される距離測定信号と方向測定信号とが、単一もしくは同期しあるいは直交する複数の、搬送波信号、副搬送波信号、変調信号、スペクトル拡散符号、もしくはこれらの組合せであり、
【0062】
前記移動端末103が、前記複数の無線マーカ101a、101bに向けて、少なくとも、システム同期信号と、識別信号と、測位起動要求信号とを含む無線信号をバースト信号として間欠発信し、前記複数の無線マーカ101a、101bが、前記移動端末103から発信された測位起動要求信号に対応し、前記移動端末に向けて、測位要求信号を含む無線信号を、セル毎もしくはセクタ毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、時分割で発信し、前記移動端末103が、前記複数の無線マーカ101a、101bから発信される測位要求信号に対応して、前記複数の無線マーカ101a、101bに向けて、少なくとも前記測位信号と方向測定信号とを含む無線信号を、セル毎もしくはセクタ毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、時分割で発信し、
【0063】
前記複数の無線マーカ101a、101bの内の少なくとも1つの無線マーカにおいて、前記測位信号の位相を測定して移動端末103からの距離を算出し、前記少なくとも1つの無線マーカの複数のアンテナ又は複数の送受波器21a〜21dに対応した方向測定信号の位相差を測定して移動端末103が位置する方向を算出し、前記距離の算出結果と、方向の算出結果とから、前記移動端末103の1次元〜3次元の何れかの次元の位置を高精度で測位する。
なお、前記のように移動端末103が歩行者によって携帯される場合、移動端末103から前記測位起動要求信号を含む無線信号を、0.5〜5秒の間隔で間欠的に発信することによって、移動端末103の電流消費を低く抑えることができる。
また、前記複数の無線マーカの内の特定の無線マーカをノードとして周辺の無線マーカとの間でアドホックネットワークを構成し、前記ノードを経由して外部の有線回線もしくは無線回線と接続し、少なくとも、前記移動端末の位置を測位するために必要な情報の交換を行なう。
【0064】
また、前記複数の無線マーカの内の特定の無線マーカ、あるいは前記複数の無線マーカとは別の無線マーカをノードとし、前記移動端末、複数の無線マーカ、あるいはこれらの両方から送信される無線信号を受信し、前記無線信号に含まれる起点信号を基準として、前記無線信号に含まれる距離測定信号の位相を測定し、双曲線航法によって、前記移動端末の位置を測位することができる。
また、前記複数の無線マーカの内の特定の無線マーカ、あるいは前記複数の無線マーカとは別の無線マーカをノードとし、前記移動端末、複数の無線マーカ、あるいはこれらの両方から送信される無線信号を受信し、前記無線信号に含まれる起点信号を基準として、前記無線信号に含まれる距離測定信号の位相を測定し、かつ前記無線信号に含まれる前記移動端末、複数の無線マーカ、あるいはこれらの両方が位置する方向を測定したデータを受信して、前記移動端末の位置を測位することができる。
【0065】
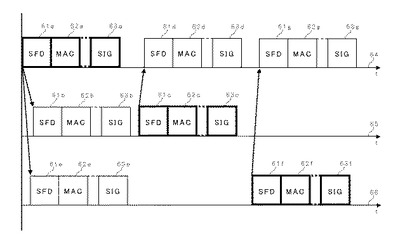
図4は、本発明の無線信号の構成例を示す図である。図4において、61a〜61gはシステム同期信号、62a〜62gはMACレイヤ、63aは前記移動端末103から間欠発信される起点信号含む測位要求信号、63bは前記無線マーカ101aで受信される測位要求信号、63cは前記無線マーカ101aに割当てられたタイムスロットから発信される距離測定信号と方向測定信号、63dは移動端末103で受信される距離測定信号と方向測定信号、63eは前記無線マーカ101bで受信される測位要求信号、63fは前記無線マーカ101bに割当てられたタイムスロットから発信される距離測定信号と方向測定信号、63gは移動端末103で受信される距離測定信号と方向測定信号、64は前記移動端末の時間軸、65は前記無線マーカ101aの時間軸、66は前記無線マーカ101bの時間軸である。なお、太線で囲った信号は、送信される信号を示し、その他の信号は受信される信号を示す。
【0066】
前記システム同期信号61a〜62gは複数ビットのユニークワードであり、±100ナノ秒程度の精度で前記移動端末103と複数の無線マーカ101a、101bとの間の制御タイミングを合わせることができるが、この程度の精度で時間差を測って距離を求めると、距離の測定誤差が数十mと大きくなる問題点がある。
前記MACレイヤ62a〜62gは、少なくとも、識別番号、相手先番号、報知信号、もしくはこれらの組合せから構成され、前記システム同期信号61a〜61gとセットになって生成される。
【0067】
前記測位要求信号に含まれる起点信号は、前記複数の無線マーカ101a、101bと、移動端末103との間で精密な同期を確立するための信号であり、単一もしくは同期しあるいは直交する複数の搬送波信号、副搬送波信号、変調信号、スペクトル拡散符号、もしくはこれらの何れかの組合せによる信号が用いられる。
一方、前記距離測定信号と方向測定信号は、正確な距離と方向の測定を行うための信号であり、単一もしくは同期しあるいは直交する複数の搬送波信号、副搬送波信号、変調信号、スペクトル拡散符号、もしくはこれらの何れかの組合せによる信号が用いられる。
【0068】
また、前記無線マーカ101a、101bから発信されるMACレイヤ62c、62fの継続時間を各々0.5ms程度とし、前記無線マーカ101a、101bから発信される距離測定信号と方向測定信号63c、63fの継続時間を各々0.5ms程度とし、システム同期信号の継続時間を無視すると、前記無線マーカ101a、101bから発信される無線信号の継続時間は合計で1ms程度となるので、前記無線マーカが8台設置され、8タイムスロットが各々の無線マーカに割当てられると、前記8台の無線マーカの継続時間は合計で8msとなる。
【0069】
また、前記無線マーカ101a、101bと移動端末103に搭載される基準発振器の周波数偏差を±0.5ppmとすると、8msの継続時間の間の周波数の変化は、起点信号の周波数を1MHzとすると、±0.5×(8/1000)Hzとなるので、同期発振器の同期保持誤差は、±360°×(4/1000)=±1.44°となり、距離の測定誤差は、±150m×(1.44°/360°)=±60cmとなる。
【0070】
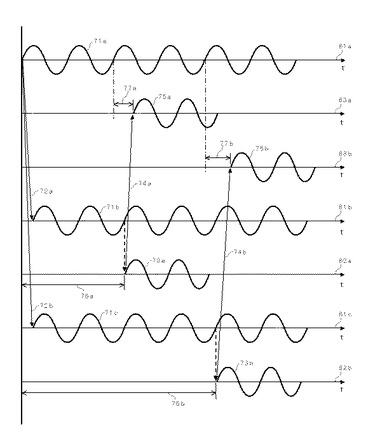
図5は、本発明のタイミングチャートである。図5において、71aは移動端末103から発信される起点信号、71bは無線マーカ101aによって再生される起点信号、71cは無線マーカ101bによって再生される起点信号、72aは前記無線マーカ101aに向けて起点信号が伝搬する伝搬経路、72bは前記無線マーカ101bに向けて起点信号が伝搬する伝搬経路、73aは前記無線マーカ101aよって再生された起点信号と同期して生成される距離測定信号、73bは前記無線マーカ101bよって再生された起点信号と同期して生成される距離測定信号、74aは無線マーカ101aから距離測定信号が伝搬する伝搬経路、74bは無線マーカ101bから距離測定信号が伝搬する伝搬経路、
【0071】
75aは再生された無線マーカ101aからの距離測定信号、75bは再生された無線マーカ101bからの距離測定信号、76aは第1のタイムスロットまでの時間、76bは第2のタイムスロットまでの時間、77aは前記起点信号と無線マーカ101bから発信される距離測定信号との位相差、77bは前記起点信号と無線マーカ101aから発信される距離測定信号との位相差、81aは移動端末1の発信手段の時間軸、83a、83bは前移動端末103の受信手段の時間軸、81bは前記無線マーカ101aの受信手段の時間軸、82aは前記無線マーカ101aの発信手段の時間軸、81cは前記無線マーカ101aの受信手段の時間軸、82bは前記無線マーカ101bの発信手段の時間軸である。
【0072】
前記移動端末103から発信される前記起点信号71aをASin(2πf1t)とすると、前記起点信号71aが、距離La(m)の伝搬経路72aを伝搬し、前記無線マーカ101aによって受信され、起点信号71bとして再生されると、BSin{2πf1t+2πLa(f1/C)}に位相が変化する。
前記再生された起点信号71bと、同期確立誤差がゼロで同期した距離測定信号73aを生成すると、生成された測位信号73aは、同じくBSin{2πf1t+2πLa(f1/C)}で表される。
【0073】
前記時分割の間隔76a後に、前記生成された測位信号73aが、前記無線マーカ101aから発信され、再び、距離La(m)の伝搬経路74aを伝搬し、前記移動端末103で再生される距離測定信号75aは、CSin{2πf1t+4πLa(f1/C)}で表わされる。ここで、Cは光の速度とする。
そこで、前記移動端末103で生成された起点信号71aと同期しあるいは直交し、周波数が前記起点信号の整数倍のクロック信号を用い、前記再生された距離測定信号75aの位相を測定すると、前記移動端末103で生成された起点信号71aと前記移動端末103で再生された距離測定信号75aとの位相差77aが測定され、ΔΦ={4πLa(f1/C)}となることから、La={CΔΦ/4πf1}から、距離La(m)が算出できる。
【0074】
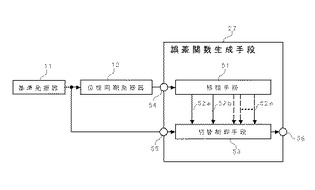
図6は、本発明の同期確立誤差関数生成手段の構成図である。図6において、11は基準発振器、12は位相同期発振器、27は誤差関数生成手段、51は移相手段、52a〜52nは移相手段51の切替タップ、53は切替制御手段、54、55、56は接続端子である。
前段の基準発振器11の出力信号を位相同期発振器12によって高い周波数に変換し、接続端子54を介して移相手段51に入力する。移相手段51は、複数段のシフトレジスタ、あるいは複数段の遅延素子、あるいは複数段の遅延回路などによって構成され、各段の信号出力は切替タップ52a〜52nによって引き出され、切替制御手段53によって順次切替えられ、高い周波数のクロック信号として接続端子56から外部(同期検出手段、同期発振手段など)に出力される。
【0075】
前記移相手段51の各段の移相量は極力小さいことが望ましく、かつ移相量の合計は、前記クロック信号の1周期以上であることが必要である。例えば、前記クロック信号の周波数が256MHzであるとすると、移相手段51の各段の移相量は4ナノ秒以下(例えば、0.4ナノ秒など)であり、かつ移相量の合計は4ナノ秒以上(例えば、6.4ナノ秒など)とする必要がある。
【0076】
上記の移相手段51が無い場合には、同期発振手段13の同期確立精度は±2ナノ秒であり、起点信号の周波数を1MHzとすると、距離の測定精度は、測位レンジの150mに対して、±30cmが限界となるが、上記の移相手段51を設け、各段に割付けられた移相量を0.4ナノ秒とし、算出した距離の平均値を求めると、測位精度を±15cmに改善することができる。
【0077】
なお、前記移相手段51は前記同期発振手段13に対して同期確立誤差関数を付与することになり、複数段のタップ52a〜52nの各段ごとに生じる同期確立誤差の合計を同期確立誤差関数として表現すれば、同期確立誤差関数は多項式によって表現でき、しかも前記多項式は0もしくは一定値に収斂することになる。
【0078】
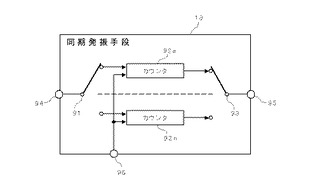
図7は、本発明の同期確立誤差関数生成手段の他の構成図である。図7において、91、93は切替スイッチ、92a〜92nは複数組のカウンタあるいは複数組の数値制御発振器、94〜96は接続端子である。
接続端子94に供給される前記起点信号の立上り点、立下り点、もしくはゼロ交差点のタイミングから検出されたセットあるいはリセット信号は、切替スイッチ91によって順次切替えられ、前記複数組のカウンタあるいは複数組の数値制御発振器92a〜92nを順次セットしあるいはリセットする。
【0079】
一方、接続端子96には位相同期発振器12(記載せず)からクロック信号が供給され、前記セットあるいはリセット信号によるセットあるいはリセットのタイミングに同期して、前記複数組のカウンタ92a〜92nによって、通常、低い周波数へカウントダウンされる。
前記複数組のカウンタあるいは複数組の数値制御発振器92a〜92nによって生成された出力信号は、切替スイッチ93により順次切替えられ、接続端子95を経由して、前記距離測定信号生成手段15に供給される。
【0080】
ここで、前記位相同期発振器12から前記同期検出手段14に供給されるクロック信号の周波数もしくは位相と、前記再生した起点信号の周波数もしくは位相とは非相関とし、かつ/又は両者間の周波数もしくは位相の関係を前記起点信号を受信している時間内にランダムに変化させることができれば、前記複数組のカウンタあるいは複数組の数値制御発振器92a〜92nの同期確立誤差の間の相関係数を低く抑えられるので、前記距離測定信号の位相を測定して距離を算出した結果から平均値を求めることで、距離測定精度を改善できるメリットが得られる。
【0081】
言い換えれば、前記複数組のカウンタあるいは複数組の数値制御発振器92a〜92nの各々に対応して、前記同期検出手段14によって検出されるセットあるいはリセット信号の検出タイミングを変化させ、前記位相同期発振器23から供給されるクロック信号の複数ビットの時間間隔内で、各々異なったタイミングでセットしあるいはリセットすることが出来きれば、全体として、同期確立誤差の平均値が0もしくは一定値に収斂することになり、前記複数組のカウンタあるいは複数組の数値制御発振器92a〜92nを設けることによって、前記同期検出手段14へ供給するクロック信号の周波数を比較的に低く抑えても、高精度の測位が可能となる。
【0082】
なお、切替スイッチ91と93の切替タイミングは同一でなく、少なくとも、前記時分割の間隔で受発信を行うタイミングに合わせる必要がある。
また、前記複数組のカウンタを用いると、1組当たり8段程度以下のカウンタで済むことから、8組のカウンタを設けても、64段程度のカウンタで済むことから経済的な規模となる。
また、前記複数組のカウンタあるいは複数組の数値制御発振器92a〜92nの各組ごとに生じる同期確立誤差の合計を同期確立誤差関数として表現すれば、同期確立誤差関数は多項式によって表現でき、しかも前記多項式は0もしくは一定値に収斂することになる。
【0083】
一方、従来のように、アナログ式あるいはデジタル式の遅延手段を設けて折り返す場合には、例えば、時分割で受発信する場合の間隔が2ミリ秒であり、継続時間が1ミリ秒の場合、前記起点信号の周波数が1MHz程度であるとしても、特に、デジタル式の遅延手段の場合には、クロック信号の周波数を100MHz〜1000MHz以上に設定する必要があるので、大規模な遅延素子が必要となる。
ただし、前記の遅延手段の入力端子と出力端子の間に切替スイッチを設け、前記起点信号を読み込む場合には前記切替スイッチを切り離し、読み込み完了後にはリング状に接続し、読み出す場合には切り離すことで、少なくとも時分割で受発信する部分の間隔2ミリ秒分に必要な遅延時間を節約することができるメリットがある。
【0084】
以上の説明では無線信号として電波を用いる場合について述べたが、無線信号として超音波信号あるいは高周波信号あるいは光信号を含むことができる。なお、超音波信号あるいは光信号の場合には、アンテナの代わりに送受波器を用い、また、光信号の場合には比較的に周波数が高い副搬送波信号あるいは高いチップレートの拡散符号を用いるものとする。
また、UWB(ウルトラワイドバンド)方式を採用することで、比較的に高い周波数の変調信号を用いることが可能となり、直径30m以下のピコセルを構成して、近距離で高精度の1次元〜3次元の内のいずれかの次元の位置測位が可能となる。
【0085】
また、前記移動端末の受信手段、無線マーカの受信手段、あるいはこれらの両方が、複数のアンテナ又は複数の送受波器を設けて周期的に切替え、前記品質検知手段において、前記複数のアンテナ又は複数の送受波器に対応して距離を測定しあるいは算出した結果の内、距離を比較的に短く算出したものを選択し、平均し、荷重平均を行い、あるいはこれらの組み合わせを行うことによって、前記距離測定結果あるいは距離算出結果を補正しあるいは補完することができる。
また、前記無線マーカが擬似衛星局であり擬似GPS信号を発信する場合、従来のGPSと同様なBPSK変調の他に任意の変調方式が用いられ、あるいはC/AコードあるいはPコード以外にも任意のコード化が可能である。
【0086】
また、前記MACレイヤには、少なくとも前記発信手段の識別符号あるいは識別番号が含まれ、あるいは局情報が含まれ、あるいはテキスト情報が含まれ、あるいは時間率1%を越えない範囲で符号長を選択することができる。
また、前記無線マーカが単一のアンテナを有し、前記移動端末が複数のアンテナを搭載して周期的に切替えながら受信しあるいは発信することでも同様な効果が得られる。
また、前記セルを更に複数のセクタに分け、前記セクタ毎に無線マーカを設置することで、高精度の測位システムを実現できる。
【産業上の利用可能性】
【0087】
本発明は上記のように構成されているため、前記無線マーカを擬似衛星局として、屋内、屋外、あるいはこれらの両方に設置することで、屋外と屋内でGPSをシームレスにつなぐ高精度なセルラー式移動無線測位システムが経済的な方法で実現できる。
また、前記複数の無線マーカによってピコセルを構成して物流管理に応用すると、倉庫内の物品管理がどの場所のどの棚の何段目に収納しているが正確に記録できることになり、物流管理の効率化に役立だてることができる。
【0088】
また、前記無線マーカが、屋外あるいは屋内を問わず離散的に配置され、前記移動端末が歩行者によって携帯されると、歩行者の自律移動支援システム、あるいは歩行者ナビゲーションシステム、あるいは火災時もしくは災害時の避難・誘導システム、あるいは児童の見守りシステムなどに活用することができる他、ロボットの自律移動にも応用できる。
また、前記無線マーカを保護者が携帯し、前記移動端末を児童が携帯することによって、迷子の探索システムに応用ができる。他に忘れ物探索システム、徘徊老人探索、その他にも応用できる。
また、本発明のセルラー式移動無線測位技術は基盤技術であり、他の多くの分野での活用が期待できる。
【図面の簡単な説明】
【0089】
【図1】本発明のセルラー式移動無線測位システムの構成図
【図2】本発明の実施の形態1によるセルラー式移動無線測位システムの構成図
【図3】本発明の実施の形態2によるセルラー式移動無線測位システムの構成図
【図4】本発明の無線信号の構成を示す図
【図5】本発明のタイミングチャート
【図6】本発明の同期確立誤差関数生成手段の構成図
【図7】本発明の同期確立誤差関数生成手段の他の構成図
【図8】従来の実施例を示す構成図
【符号の説明】
【0090】
1 RTK測位システム
2 発信手段または擬似衛星局
3 固定基準局受信手段
4 移動基準局受信手段
5 ローバー受信手段
6 利用者処理ユニットまたは受信手段
7 データリンク
101a、101b セル毎もしくはセクタ毎に配置された複数の無線マーカ
21a〜21d アンテナ
103 移動端末
104a、104b 複数の無線マーカと移動端末との間の距離
105a、105b 複数の無線マーカから見た移動端末の方向
【技術分野】
【0001】
この発明は、複数の無線マーカと移動端末との間の、同一周波数による時分割通信によって、移動端末の1次元〜3次元の何れかの次元の位置を高精度で測位することを可能とするものである。
【背景技術】
【0002】
従来から、複数の発信手段を用いて測位を行なうシステムが提案されている。(例えば、特許文献1〜3参照)
【特許文献1】特開2005−083888号
【特許文献2】特開2006−023261号
【特許文献3】特開2008−139292号公報
【0003】
図8は、特許文献1に記載されている従来の「RTK測位システム及びその測位方法」の実施例である。
図8において、1は、RTK(リアルタイムキネマティック)測位を利用して利用者の測位を行うRTK測位システムである。
このRTK測位システム1は、4基のスードライト2と、固定基準局受信手段3と移動基準局受信手段4とからなる2基の基準局受信手段と、ローバー受信手段5と、利用者処理ユニット6と、データリンク7とにより構成されている。ここで、スードライト2は、衛星の代わりの信号源として使用され、利用者の3次元測位を行う場合は、少なくとも4基必要であり、2次元測位を行う場合は、少なくとも3基が必要であるとされている。
【0004】
上記のように、従来の「RTK測位システム及びその測位方法」では3次元の測位を行なうために少なくとも4基のスードライト(擬似衛星局)が必要であり、更に、利用者処理ユニット6の他に、固定基準局受信手段3と移動基準局受信手段4とからなる2基の基準局受信手段と、ローバー受信機5と、データリンク7が必要であることから、システムが複雑であり、取り扱いが煩雑であり、高価となる問題点があった。
【0005】
一方、特許文献2に記載されている従来の「アクティブタグ装置」では、発信手段1の指向性アンテナの方向31に対向して受信手段2の指向性アンテナ21aと21bを向け、発信手段1が高周波信号を発信中に指向性アンテナ21aと21bを切替えた時に受信した高周波信号のタイミングあるいは振幅あるいは周波数あるいは位相あるいはこれらの組合わせの変化をリアルタイムで検知し、当該発信手段1が位置する方向を検知し、当該発信手段1と受信手段2の距離を検知するとされているが、当該発信手段1と受信手段2の距離を検知する手段あるいは方法が明確にされておらず、受信手段2の3次元の位置を測位する旨の訴求がなされていない問題点がある。
【0006】
また、特許文献3に記載されている従来の「移動無線局の位置を決定する測位システム、プログラムおよび位置決定方式」では、移動無線端末の位置を決定するためのより簡単でより小さな構成を実現する。移動無線局(260〜282)の位置を決定する装置(470、370、110、120)は、第1の基準無線局(200〜242)の位置、第2の基準無線局(200〜242)の位置、第3の基準無線局(200〜242)の位置、その移動無線局とその第1の基準無線局の間の第1の相対的角度方向、その移動無線局とその第2の基準無線局の間の第2の相対的角度方向、およびその移動無線局とその第3の基準無線局の間の第3の相対的角度方向から、その移動無線局の位置を決定する手段を具えているが、前記複数の基準無線局からの相対的角度方向のみを測定して測位するものであり、高精度の測位が難しい問題点がある。
【発明の開示】
【発明が解決しようとする課題】
【0007】
この発明は、セル毎もしくはセクタ毎に配置された複数の無線マーカと、移動体に設置されあるいは移動体によって携帯される移動端末との間の、同一周波数による時分割通信によって、移動端末の1次元〜3次元の内の何れかの次元の位置を高精度で測位するためのセルラー式移動無線測位システムを安価に実現するためのものである。
【課題を解決するための手段】
【0008】
この発明に係わるセルラー式移動無線測位システムは、複数の指向性アンテナを搭載して周期的に切替えながら、少なくとも、同期信号と、識別信号と、距離を測定するための距離測定信号と、方向を測定するための方向測定信号とを含む無線信号を、セル毎もしくはセクタ毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で発信する複数の無線マーカと、前記無線信号を受信して1次元〜3次元の何れかの次元の測位を行なうための移動端末とから構成され、前記距離測定信号が、前記移動端末から複数の無線マーカに向けて発信される測位要求信号に含まれる起点信号と、高精度で同期しあるいは直交する搬送波信号、副搬送波信号、変調信号、スペクトル拡散符号、もしくはこれらの組み合わせであり、
【0009】
あるいは、少なくとも、システム同期信号と、識別信号と、距離を測定するための距離測定信号と、方向を測定するための方向測定信号とを含む無線信号を、セル毎もしくはセクタ毎に予め割当てられた周波数、タイムスロット、もしくはこれらの両方で発信する移動端末と、複数の指向性アンテナを搭載して周期的に切替えながら、前記無線信号を受信して1次元〜3次元の内の何れかの次元の測位を行なうための複数の無線マーカとから構成され、前記距離測定信号が、前記複数の無線マーカから移動端末に向けて発信される測位要求信号に含まれる起点信号と、高精度で同期しあるいは直交する搬送波信号、副搬送波信号、変調信号、スペクトル拡散符号、もしくはこれらの組み合わせであり、
【0010】
前記距離測定信号と起点信号とが、瞬時にしかも高精度で同期を確立し、前記起点信号が消滅した後も、比較的に長時間同期を維持できる同期発振手段と、高精度でしかもリアルタイムで位相の測定が可能な位相測定手段とを用い、前記複数の無線マーカの内の少なくとも1つの基地局と移動端末との距離と、お互いが位置する方向を高精度で算出することによって、1次元〜3次元の内の何れかの次元の測位を可能とするよう構成されている。
【発明の効果】
【0011】
本発明のセルラー式移動無線測位システムでは、セル毎もしくはセクタ毎に配置された複数の無線マーカと、移動体に設置されあるいは移動体によって携帯される移動端末との間の、同一周波数による時分割通信によって、移動端末の1次元〜3次元の内の何れかの次元の位置を高精度でしかもリアルタイムで測位するためのシステムを安価に実現できる利点がある。
【発明を実施するための最良の形態】
【0012】
この発明に係わるセルラー式移動無線測位システムは、図1、図2、および請求項1に本発明の第1の実施の形態を示すように、超音波信号あるいは高周波信号あるいは光信号である無線信号を用いるセルラー式移動無線測位システムにおいて、前記無線信号を移動しながら時分割で発信し受信するための移動端末103と、位置の基準となる複数の無線マーカ101a、101bとから構成され、
【0013】
前記移動端末103が、少なくとも、アンテナ切替手段32と、起点信号生成手段37と、発信手段34と、受信手段33と、測定信号再生手段35と、位相測定手段36と、位置算出手段38とを有し、
、
前記アンテナ切替手段32が、アンテナ又は送受波器を発信手段又は受信手段の何れかに時分割で切替え、前記起点信号生成手段37が、少なくとも、システム同期信号と、識別信号と、起点信号を含む測位要求信号とを生成し、前記発信手段34が、前記測位要求信号を含む無線信号を前記複数の無線マーカに向けてバースト信号として発信し、
【0014】
前記受信手段33が、前記複数の無線マーカ101a、101bから発信される無線信号を受信し、前記測定信号再生手段35が、前記受信手段によって受信される無線信号から、距離測定信号と方向測定信号とを再生し、前記位相測定手段36が、前記再生された距離測定信号と方向測定信号との位相を測定し、前記位置算出手段38が、前記位相の測定結果から自局の位置を測位し、
【0015】
前記複数の無線マーカ101a、101bが、少なくとも、アンテナ切替手段19と、受信手段18と、起点信号再生手段16と、同期発振手段13と、測定信号生成手段15と、発信手段17とを有し、
前記アンテナ切替手段19が、複数のアンテナ又は複数の送受波器21a〜21dを周期的に切替え、かつ発信手段又は受信手段の何れかに時分割で切替え、前記受信手段18が、前記移動端末103から発信される測位要求信号を含む無線信号を受信し、前記起点信号再生手段16が、前記受信手段によって受信される無線信号から測位要求信号に含まれる起点信号を再生し、
【0016】
前記同期発振手段13が、前記再生された起点信号と高精度でかつ短時間に同期を確立して同期を保持し、前記測定信号生成手段15が、前記同期発振手段の出力と同期しあるいは直交する距離測定信号と、前記距離測定信号とは別に、方向を測定するための方向測定信号とを生成し、前記発信手段17が、前記距離測定信号と方向測定信号を含む無線信号を、セル毎もしくはセクタ毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、複数のアンテナ又は複数の送受波器を周期的に切替えながら、前記移動端末に向けて時分割で発信し、
【0017】
前記移動端末103から発信される起点信号と、前記複数の無線マーカ101a、101bから発信される距離測定信号と方向測定信号とが、単一もしくは同期しあるいは直交する複数の、搬送波信号、副搬送波信号、変調信号、スペクトル拡散符号、もしくはこれらの組合せであり、前記移動端末103において、前記距離測定信号の位相を測定して前記複数の無線マーカ101a、101bの内の少なくとも1つの無線マーカからの距離を算出し、前記少なくとも1つの無線マーカの複数のアンテナ又は複数の送受波器21a〜21dに対応した方向測定信号の位相差を測定して前記少なくとも1つの無線マーカが位置する方向を算出し、前記距離の算出結果と、方向の算出結果とから、前記移動端末103の1次元〜3次元の内の何れかの次元の位置を高精度で測位する。
【0018】
また、図1、図3、および請求項2に本発明の第2の形態を示すように、超音波信号あるいは高周波信号あるいは光信号である無線信号を用いるセルラー式移動無線測位システムにおいて、前記無線信号を移動しながら時分割で発信し受信するための移動端末103と、セル毎もしくはセクタ毎に配置され位置の基準となる複数の無線マーカ101a、101bとから構成され、
【0019】
前記複数の無線マーカ101a、101bが、少なくとも、アンテナ切替手段19と、受信手段18と、起点信号生成手段37と、発信手段17と、測定信号再生手段35と、位相測定手段36と、位置算出手段37とを有し、
前記アンテナ切替手段19が、複数の指向性アンテナ又は複数の指向性送受波器21a〜21dを周期的に切替え、かつ発信手段17又は受信手段18の何れかに時分割で切替え、前記受信手段18が、前記移動端末103から発信される測位起動要求信号を受信し、前記起点信号生成手段37が、前記測位起動要求信号に対応して、少なくとも、システム同期信号と、識別信号と、起点信号を含む測位要求信号とを生成し、
【0020】
前記発信手段17が、前記起点信号を含む無線信号を、前記移動端末103に向けて、セル毎もしくはセクタ毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、バースト信号として発信し、前記受信手段18が、前記測位要求信号に応答して前記移動端末103から発信される無線信号を、各セル毎もしくはセクタ毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、複数のアンテナ又は複数の送受波器21a〜21dを周期的に切替えながら、時分割で受信し、前記測定信号再生手段35が、前記受信手段18によって受信される無線信号から、距離測定信号と方向測定信号とを再生し、前記位相測定手段36が、前記再生された距離測定信号と方向測定信号との位相を測定し、前記位置算出手段38が、前記位相の測定結果から移動端末103の位置を測位し、
【0021】
前記移動端末103が、少なくとも、アンテナ切替手段32と、受信手段33と、起点信号再生手段16と、同期発振手段13と、測定信号生成手段15と、発信手段34とを有し、
前記アンテナ切替手段32が、アンテナ又は送受波器31を発信手段34又は受信手段33の何れかに時分割で切替え、前記発信手段34が、少なくとも、システム同期信号と、識別信号と、測位起動要求信号とを生成し、前記測位起動要求信号を含む無線信号を間欠発信し、前記受信手段33が、前記複数の無線マーカ101a、101bから、セル毎もしくはセクタ毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、発信される無線信号を受信し、前記起点信号再生手段15が、前記受信手段33によって受信される無線信号から、前記測位要求信号に含まれる起点信号を再生し、
【0022】
前記同期発振手段13が、前記再生された起点信号と高精度でかつ短時間に同期を確立して同期を保持し、前記測定信号生成手段15が、前記同期発振手段の出力と同期しあるいは直交する距離測定信号と、前記距離測定信号とは別に、方向を測定するための方向測定信号とを生成し、前記発信手段34が、前記距離測定信号と方向測定信号を含む無線信号を、セル毎もしくはセクタ毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、前記複数の無線マーカ101a、101bに向けて時分割で発信し、前記複数の無線マーカ101a、101bから発信される起点信号と、前記移動端末103から発信される距離測定信号と方向測定信号とが、単一もしくは同期しあるいは直交する複数の、搬送波信号、副搬送波信号、変調信号、スペクトル拡散符号、もしくはこれらの組合せであり、
【0023】
前記移動端末103が、前記複数の無線マーカ101a、101bに向けて、少なくとも、システム同期信号と、識別信号と、測位起動要求信号とを含む無線信号をバースト信号として間欠発信し、前記複数の無線マーカ101a、101bが、前記移動端末103から発信された測位起動要求信号に対応し、前記移動端末に向けて、測位要求信号を含む無線信号を、セル毎もしくはセクタ毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、時分割で発信し、前記移動端末103が、前記複数の無線マーカ101a、101bから発信される測位要求信号に対応して、前記複数の無線マーカ101a、101bに向けて、少なくとも前記測位信号と方向測定信号とを含む無線信号を、セル毎もしくはセクタ毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、時分割で発信し、
【0024】
前記複数の無線マーカ101a、101bの内の少なくとも1つの無線マーカにおいて、前記測位信号の位相を測定して移動端末103からの距離を算出し、前記少なくとも1つの無線マーカの複数のアンテナ又は複数の送受波器21a〜21dに対応した方向測定信号の位相差を測定して移動端末103が位置する方向を算出し、前記距離の算出結果と、方向の算出結果とから、前記移動端末103の1次元〜3次元の内の何れかの次元の位置を高精度で測位する。
【0025】
また、請求項3に示すように、前記起点信号再生手段16もしくは測定信号再生手段35において、前記再生する起点信号もしくは測定信号が、無線信号の搬送波信号あるいは副搬送波信号である場合には、群遅延歪みの少ない帯域通過フイルタを通し、あるいは無線信号を変調した変調信号である場合には、遅延誤差の少ないアナログ復調器もしくは高い周波数のクロック信号を用いる遅延誤差の少ないデジタル復調器によって復調した後に、前記帯域通過フイルタを通して再生する。
【0026】
また、請求項4に示すように、前記複数の無線マーカ101a、101bあるいは移動端末103の同期発振手段13が、基準発振器11もしくは位相同期発振器によって駆動されるセットあるいはリセット付きのカウンタあるいは数値制御発振器によって構成され、前記受信機18によって受信され信号再生手段16によって復調されもしくは再生された起点信号の立上がり点、立下がり点、もしくはゼロ交差点のタイミングを、同期検出手段14によって少なくとも16MHz以上の周波数のクロック信号を用いて検出し、前記同期検出手段が検出したタイミングで、前記カウンタあるいは数値制御発振器をセットしもしくはリセットすることによって、前記同期発振手段が起点信号と短時間で同期を確立し、同期を保持できる。
【0027】
また、請求項5に示すように、前記複数の無線マーカ101a、101bあるいは移動端末103の同期発振手段13と、前記復調されもしくは再生された起点信号との間の同期確立誤差を低減し、高精度でかつ短時間に同期を確立させるために、前記移動端末103、前記複数の無線マーカ101a、101b、あるいはこれらの両方に同期確立誤差関数を付与し、前記同期確立誤差関数が前記同期確立誤差を限りなくゼロに近づける。
【0028】
また、図6および請求項6に示すように、前記複数の無線マーカ101a、101bあるいは移動端末103の同期検出手段14に前記同期確立誤差関数を付与するために、前記位相同期発振器23のクロック信号出力の位相をシフトさせるための複数組の移相手段51と、前記複数組の移相手段によって各々異なった位相にシフトされた複数組のクロック信号を選択して外部に出力するためのタイミング制御手段53とを設け、前記移相手段の移相量の合計を、前記クロック信号の一周期の間隔よりも大きく設定することによって、距離の算出精度を向上させる。
【0029】
また、図7および請求項7に示すように、前記複数の無線マーカ101a、101bあるいは移動端末103の同期発振手段13に前記同期確立誤差関数を付与するために、前記同期発振手段が複数組のカウンタあるいは複数組の数値制御発振器92a〜92nを有し、前記複数組のカウンタあるいは複数組の数値制御発振器が、前記再生された起点信号と各々異なった複数のタイミングで切替手段91によって切替えられて同期を確立し、前記複数組のカウンタあるいは複数組の数値制御発振器から出力される出力信号を異なった複数のタイミングで選択手段93によって選択し、前記選択された出力信号に同期しもしくは直交した単一もしくは複数の距離測定信号を生成して前記移動端末103あるいは複数の無線マーカ101a、101bに向けて発信し、前記移動端末あるいは複数の無線マーカの位置算出手段37において、前記複数のタイミングに対応して算出した距離の平均値を求めることによって、距離の算出精度を向上させる。
【0030】
また、請求項8に示すように、前記複数の無線マーカ101a、101bあるいは移動端末103から発信され、あるいは前記複数の無線マーカあるいは移動端末によって受信される起点信号に前記同期確立誤差関数を付与するために、前記無線マーカの複数のアンテナ又は複数の送受波器21a〜21dを周期的に切替ながら、前記起点信号を発信しあるいは受信し、距離の算出精度を向上させる。
【0031】
また、請求項9に示すように、また、前記移動端末103あるいは無線マーカ101a、101bの位相測定手段36が積和演算器を有し、前記積和演算器のSinのルックアップテーブルとして0、1、0、−1、もしくは1、1、−1、−1、もしくはこれらの整数倍の繰り返しとし、Cosのルックアップテーブルとして1、0、−1、0、もしくは1、−1、−1、1、もしくはこれらの整数倍の繰り返しとして積和演算する。なお、積和演算を行う際の1との乗算は前記デジタル信号と同じ値であり、−1との乗算は前記デジタル信号の補数を求めることであり、0との剰算は0であり、前記積和演算器を単純化でき、しかも高速で、リアルタイムの演算が可能となる。
【0032】
また、請求項10に示すように、前記無線マーカの複数のアンテナ又は複数の送受波器21a〜21dが指向性を有し、前記指向性の方向を下方向もしくは斜め下方向もしくは水平方向に向けて、前記方向測定信号の0.5波長から2波長の間隔で配置する。
また、請求項11に示すように、前記セルを更に複数のセクタに分け、前記セクタ毎に無線マーカを設置する。
【0033】
また、請求項12に示すように、前記移動端末103の受信手段33、無線マーカ101の受信手段18、あるいはこれらの両方が、伝搬経路の品質を検知する品質検知手段を有し、前記品質検知手段が、前記受信手段において受信した無線信号の電力あるいは信号対雑音比を測定した結果から回線品質を分析し、前記位相測定手段36で距離測定信号の位相あるいは方向測定信号の位相差を測定した結果から、距離測定精度あるいは方向測定精度を分析し、あるいはこれらの分析の両方を行い、前記距離測定処理、方向測定処理、あるいはこれらの両方の結果を補正しあるいは補完する。
【0034】
また、請求項13に示すように、前記移動端末の受信手段、無線マーカの受信手段、あるいはこれらの両方が、複数のアンテナ又は複数の送受波器を設けて周期的に切替え、前記品質検知手段において、前記複数のアンテナ又は複数の送受波器に対応して距離を測定しあるいは算出した結果の内、距離を比較的に短く算出したものを選択し、平均し、荷重平均を行い、あるいはこれらの組み合わせを行うことによって、前記距離測定結果あるいは距離算出結果を補正しあるいは補完する。
また、請求項14に示すように、前記複数の無線マーカの内の特定の無線マーカをノードとして周辺の無線マーカとの間でアドホックネットワークを構成し、前記ノードを経由して外部の有線回線もしくは無線回線と接続し、少なくとも、前記移動端末の位置を測位するために必要な情報の交換を行なう。
また、請求項15に示すように、前記複数の無線マーカの内の特定の無線マーカ、あるいは前記複数の無線マーカとは別の無線マーカをノードとし、前記移動端末、複数の無線マーカ、あるいはこれらの両方から送信される無線信号を受信し、前記無線信号に含まれる起点信号を基準として、前記無線信号に含まれる距離測定信号の位相を測定し、双曲線航法によって、前記移動端末の位置を測位する。
【0035】
また、請求項16に示すように、前記複数の無線マーカの内の特定の無線マーカ、あるいは前記複数の無線マーカとは別の無線マーカをノードとし、前記移動端末、複数の無線マーカ、あるいはこれらの両方から送信される無線信号を受信し、前記無線信号に含まれる起点信号を基準として、前記無線信号に含まれる距離測定信号の位相を測定し、かつ前記無線信号に含まれる前記移動端末、複数の無線マーカ、あるいはこれらの両方が位置する方向を測定したデータを受信して、前記移動端末の位置を測位する。
また、請求項17に示すように、前記無線信号の周波数として、GPSに割当てられた周波数、あるいはその近傍の周波数を割当て、前記複数の無線マーカから発信される無線信号の占有率を20%以下とすることで、屋外と屋内でGPSをシームレスに接続する。
【0036】
(実施の形態1)
図1、図2は本発明の第1の形態によるセルラー式移動無線測位システムの構成図である。図1、図2に示す超音波信号あるいは高周波信号あるいは光信号である無線信号を用いるセルラー式移動無線測位システムにおいて、前記無線信号を移動しながら時分割で発信し受信するための移動端末103と、セル毎もしくはセクタ毎に配置され位置の基準となる複数の無線マーカ101a、101bとから構成され、
【0037】
前記移動端末103が、少なくとも、アンテナ切替手段32と、起点信号生成手段37と、発信手段34と、受信手段33と、測定信号再生手段35と、位相測定手段36と、位置算出手段38とを有し、
、
前記アンテナ切替手段32が、アンテナ又は送受波器を発信手段又は受信手段の何れかに時分割で切替え、前記起点信号生成手段37が、少なくとも、システム同期信号と、識別信号と、起点信号を含む測位要求信号とを生成し、前記発信手段34が、前記測位要求信号を含む無線信号を前記複数の無線マーカに向けてバースト信号として発信し、
【0038】
前記受信手段33が、前記複数の無線マーカ101a、101bから発信される無線信号を受信し、前記測定信号再生手段35が、前記受信手段によって受信される無線信号から、距離測定信号と方向測定信号とを再生し、前記位相測定手段36が、前記再生された距離測定信号と方向測定信号との位相を測定し、前記位置算出手段38が、前記位相の測定結果から自局の位置を測位し、
【0039】
前記複数の無線マーカ101a、101bが、少なくとも、アンテナ切替手段19と、受信手段18と、起点信号再生手段16と、同期発振手段13と、測定信号生成手段15と、発信手段17とを有し、
前記アンテナ切替手段19が、複数のアンテナ又は複数の送受波器21a〜21dを周期的に切替え、かつ発信手段又は受信手段の何れかに時分割で切替え、前記受信手段18が、前記移動端末103から発信される測位要求信号を含む無線信号を受信し、前記起点信号再生手段16が、前記受信手段によって受信される無線信号から測位要求信号に含まれる起点信号を再生し、
【0040】
前記同期発振手段13が、前記再生された起点信号と高精度でかつ短時間に同期を確立して同期を保持し、前記測定信号生成手段15が、前記同期発振手段の出力と同期しあるいは直交する距離測定信号と、前記距離測定信号とは別に、方向を測定するための方向測定信号とを生成し、前記発信手段17が、前記距離測定信号と方向測定信号を含む無線信号を、セル毎もしくはセクタ毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、指向性の方向が下方向もしくは斜め下方向に向けて前記方向測定信号の0.5波長から2波長の間隔で配置されれた、複数のアンテナ又は複数の送受波器を周期的に切替えながら、前記移動端末に向けて時分割で発信し、
【0041】
前記移動端末103から発信される起点信号と、前記複数の無線マーカ101a、101bから発信される距離測定信号と方向測定信号とが、単一もしくは同期しあるいは直交する複数の、搬送波信号、副搬送波信号、変調信号、スペクトル拡散符号、もしくはこれらの組合せであり、前記移動端末103において、前記距離測定信号の位相を測定して前記複数の無線マーカ101a、101bの内の少なくとも1つの無線マーカからの距離を算出し、前記少なくとも1つの無線マーカの複数のアンテナ又は複数の送受波器21a〜21dに対応した方向測定信号の位相差を測定して前記少なくとも1つの無線マーカが位置する方向を算出し、前記距離の算出結果と、方向の算出結果とから、前記移動端末103の1次元〜3次元の何れかの次元の位置を高精度で測位する。
なお、前記1次元の位置とは、前記無線マーカと移動端末との距離、もしくは前記移動端末が位置する方向を意味する。
【0042】
また、前記起点信号再生手段16もしくは測定信号再生手段35において、前記再生する起点信号もしくは測定信号が、無線信号の搬送波信号あるいは副搬送波信号である場合には、群遅延歪みの少ない帯域通過フイルタ(例えば、ガウシャンフイルタ)を通し、あるいは無線信号を変調した変調信号である場合には、遅延誤差の少ないアナログ復調器もしくは高い周波数のクロック信号を用いる遅延誤差の少ないデジタル復調器によって復調した後に、前記帯域通過フイルタを通して再生する。
【0043】
また、前記複数の無線マーカ101a、101bあるいは移動端末103の同期発振手段13が、基準発振器11もしくは位相同期発振器によって駆動されるセットあるいはリセット付きのカウンタあるいは数値制御発振器によって構成され、前記受信機18によって受信され信号再生手段16によって復調されもしくは再生された起点信号の立上がり点、立下がり点、もしくはゼロ交差点のタイミングを、同期検出手段14によって少なくとも16MHz以上の周波数のクロック信号を用いて検出し、前記同期検出手段が検出したタイミングで、前記カウンタあるいは数値制御発振器をセットしもしくはリセットすることによって、前記同期発振手段が起点信号と短時間で同期を確立し、同期を保持できる。
また、基準発振器11、39には特に高安定のものが必要であり、例えば、±0.5ppm以内のものが用いられる。
【0044】
また、前記複数の無線マーカ101a、101bあるいは移動端末103の同期発振手段13と、前記復調されもしくは再生された起点信号との間の同期確立誤差を低減し、高精度でかつ短時間に同期を確立させるために、前記移動端末103、前記複数の無線マーカ101a、101b、あるいはこれらの両方に同期確立誤差関数を付与し、前記同期確立誤差関数が前記同期確立誤差を限りなくゼロに近づける。
【0045】
また、図6に示すように、前記複数の無線マーカ101a、101bあるいは移動端末103の同期検出手段14に前記同期確立誤差関数を付与するために、前記位相同期発振器23のクロック信号出力の位相をシフトさせるための複数組の移相手段51と、前記複数組の移相手段によって各々異なった位相にシフトされた複数組のクロック信号を選択して外部に出力するためのタイミング制御手段53とを設け、前記移相手段の移相量の合計を、前記クロック信号の一周期の間隔よりも大きく設定することによって、距離の算出精度を向上させる。
【0046】
また、図7に示すように、前記複数の無線マーカ101a、101bあるいは移動端末103の同期発振手段13に前記同期確立誤差関数を付与するために、前記同期発振手段が複数組のカウンタあるいは複数組の数値制御発振器92a〜92nを有し、前記複数組のカウンタあるいは複数組の数値制御発振器が、前記再生された起点信号と各々異なった複数のタイミングで切替手段91によって切替えられて同期を確立し、前記複数組のカウンタあるいは複数組の数値制御発振器から出力される出力信号を異なった複数のタイミングで選択手段93によって選択し、前記選択された出力信号に同期しもしくは直交した単一もしくは複数の距離測定信号を生成して前記移動端末103あるいは複数の無線マーカ101a、101bに向けて発信し、前記移動端末あるいは複数の無線マーカの位置算出手段37において、前記複数のタイミングに対応して算出した距離の平均値を求めることによって、距離の算出精度を向上させる。
【0047】
また、前記複数の無線マーカ101a、101bあるいは移動端末103から発信され、あるいは前記複数の無線マーカあるいは移動端末によって受信される起点信号に前記同期確立誤差関数を付与するために、前記無線マーカの複数のアンテナ又は複数の送受波器21a〜21dを周期的に切替ながら、前記起点信号を発信しあるいは受信し、距離の算出精度を向上させる。
【0048】
また、前記移動端末103あるいは無線マーカ101a、101bの位相測定手段36が積和演算器を有し、前記測位信号および方向測定信号を、例えば8ビット以上のアナログデジタル変換器によってデジタル信号に変換した後に、Sinのルックアップテーブルとして0、1、0、−1、もしくは1、1、−1、−1、もしくはこれらの整数倍の繰り返しとし、Cosのルックアップテーブルとして1、0、−1、0、もしくは1、−1、−1、1、もしくはこれらの整数倍の繰り返しとして積和演算する。なお、積和演算を行う際の1との乗算は前記デジタル信号と同じ値であり、−1との乗算は前記デジタル信号の補数を求めることであり、0との剰算は0であり、前記積和演算器を単純化でき、しかも高速で、リアルタイムの演算が可能となる。
【0049】
また、位置演算の主要な部分である位相測定を前記積和演算器を用いて処理できるので、前記位置算出手段38に要求される処理内容はそれほど大きくなく、通常のマイクロプロセッサを用いて構成することができるメリットが得られる。
また、前記無線マーカの複数のアンテナ又は複数の送受波器21a〜21dが指向性を有し、前記指向性の方向を下方向もしくは斜め下方向もしくは水平方向に向けて、前記方向測定信号の0.5波長から2波長の間隔で配置する。
また、前記セルを更に複数のセクタに分け、前記セクタ毎に無線マーカを設置する。
【0050】
また、前記移動端末103の受信手段33、複数の無線マーカ101a、101bの受信手段18、あるいはこれらの両方が、伝搬経路の品質を検知する品質検知手段を有し、前記品質検知手段が、前記受信手段において受信した無線信号の電力あるいは信号対雑音比を測定した結果から回線品質を分析し、前記位相測定手段36で距離測定信号の位相あるいは方向測定信号の位相差を測定した結果から、距離測定精度あるいは方向測定精度を分析し、あるいはこれらの分析の両方を行い、前記距離測定処理、方向測定処理、あるいはこれらの両方の結果を補正しあるいは補完する。
【0051】
また、前記移動端末の受信手段、無線マーカの受信手段、あるいはこれらの両方が、複数のアンテナ又は複数の送受波器を設けて周期的に切替え、前記品質検知手段において、前記複数のアンテナ又は複数の送受波器に対応して距離を測定しあるいは算出した結果の内、距離を比較的に短く算出したものを選択し、平均し、荷重平均を行い、あるいはこれらの組み合わせを行うことによって、前記距離測定結果あるいは距離算出結果を補正しあるいは補完する。
また、前記無線信号の周波数として、GPSに割当てられた周波数、あるいはその近傍の周波数を割当て、前記複数の無線マーカから発信される無線信号の占有率を20%以下とすることで、屋外と屋内でGPSをシームレスに接続する。
【0052】
前記無線マーカが単一の場合に、距離の算出結果を距離(Lm)、方向の算出結果を方向(α(X)、α(Y))とすると、前記距離(Lm)と、方向(α(X)、α(Y))との測定結果から、次のように、移動端末の2次元もしくは3次元の位置を求めることができる。
(1)無線マーカの複数のアンテナ21a〜21dが下方を向いている場合
Xx=X0−L*Sin(α(X)) −−−−(1)
Yy=Y0−L*Sin(α(Y)) −−−−(2)
Zz=Z0−L*√(1−Sin^2(α(X))−Sin^2(α(Y))−−−−(3)
【0053】
(2)無線マーカの複数のアンテナ21a〜21dがβ(Y)傾いている場合
Xx=X0−L*Sin(α(X)) −−−−(4)
Yy=Y0−L*Sin{(α(Y))+(β(Y))} −−−−(5)
Zz=Z0−L*√(1−Sin^2(α(X))−Sin^2(γ(Y))−−−−(6)
ただし、γ(Y)=α(Y)+β(Y) < 90°とする。
【0054】
ここで、前記距離測定信号が1MHzの場合、距離の測定レンジが150mとなり、前記距離測定信号の位相が最大360°となるので、位相差を検出することによって相対距離が高精度で測定できる。
また、前記位相差の測定精度が±0.5°程度が実現できるので、相対距離の測定誤差として±150m×(0.5/360°)=±21cm程度が実現できる。
なお、無線マーカが複数の場合には、移動端末103から発信される測位要求信号を含む無線信号を、前記複数の無線マーカ101a、101bが受信すると、前記距離測定信号と方向測定信号を含む無線信号を、セル毎もしくはセクタ毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、複数のアンテナ又は複数の送受波器21a〜21dを周期的に切替えながら、前記移動端末103に向けて時分割で発信することで、前記移動端末103の位置を高精度で測位する。
【0055】
また、無線マーカに2基のアンテナを設けて周期的に切替えることによって、1次元もしくは2次元の位置を測位することも可能である。
また、前記複数の無線マーカ101a、101bが、擬似衛星局(スードライト)であり、前記擬似衛星局から発信される無線信号が、時間率20%以下の短いバースト信号である場合、遠近問題が生じず、したがって、発信可能な電力を1mW程度まで高めることが可能である。
また、単一の無線マーカを利用しても、1次元〜3次元の何れかの次元の測位が可能なことから、従来の擬似衛星局4局を利用して双曲線航法により1次元〜3次元の何れかの次元の測位を行なう場合に比較して、マルチパスによる影響を軽減することができる。
【0056】
また、前記複数の無線マーカ101a、101bを離散的に配置する場合、少なくとも1局の発信手段が見通せれば1次元〜3次元の何れかの次元の測位が可能となることから、経済的なシステム設計が可能となる。
また、前記セルを更に複数のセクタに分け、前記セクタ毎に無線マーカを設置することで、高精度の測位システムを実現できる。
また、前記移動端末にも方向測定信号の0.5波長から2波長の間隔で複数の指向性アンテナを接続し、周期的に切替ながら距離の算出、方向の算出、あるいはこれらの両方を行なうことで、マルチパスによる影響を軽減することができる。
【0057】
(実施の形態2)
図1、図3は本発明の第2の形態によるセルラー式移動無線測位システムの構成図である。図1、図3に示す超音波信号あるいは高周波信号あるいは光信号である無線信号を用いるセルラー式移動無線測位システムにおいて、前記無線信号を移動しながら時分割で発信し受信するための移動端末103と、位置の基準となる複数の無線マーカ101a、101bとから構成され、
【0058】
前記複数の無線マーカ101a、101bが、少なくとも、アンテナ切替手段19と、受信手段18と、起点信号生成手段37と、発信手段17と、測定信号再生手段35と、位相測定手段36と、位置算出手段37とを有し、
前記アンテナ切替手段19が、複数の指向性アンテナ又は複数の指向性送受波器21a〜21dを周期的に切替え、かつ発信手段17又は受信手段18の何れかに時分割で切替え、前記受信手段18が、前記移動端末103から発信される測位起動要求信号を受信し、前記起点信号生成手段37が、前記測位起動要求信号に対応して、少なくとも、システム同期信号と、識別信号と、起点信号を含む測位要求信号とを生成し、
【0059】
前記発信手段17が、前記起点信号を含む無線信号を、前記移動端末103に向けて、セル毎もしくはセクタ毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、バースト信号として発信し、前記受信手段18が、前記測位要求信号に応答して前記移動端末103から発信される無線信号を、各セル毎もしくはセクタ毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、指向性の方向が下方向もしくは斜め下方向に向けて前記方向測定信号の0.5波長から2波長の間隔で配置された、複数のアンテナ又は複数の送受波器21a〜21dを周期的に切替えながら、時分割で受信し、前記測定信号再生手段35が、前記受信手段18によって受信される無線信号から、距離測定信号と方向測定信号とを再生し、前記位相測定手段36が、前記再生された距離測定信号と方向測定信号との位相を測定し、前記位置算出手段38が、前記位相の測定結果から移動端末103の位置を測位し、
【0060】
前記移動端末103が、少なくとも、アンテナ切替手段32と、受信手段33と、起点信号再生手段16と、同期発振手段13と、測定信号生成手段15と、発信手段34とを有し、
前記アンテナ切替手段32が、アンテナ又は送受波器31を発信手段34又は受信手段33の何れかに時分割で切替え、前記発信手段34が、少なくとも、システム同期信号と、識別信号と、測位起動要求信号とを生成し、前記測位起動要求信号を含む無線信号を間欠発信し、前記受信手段33が、前記複数の無線マーカ101a、101bから、セル毎もしくはセクタ毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、発信される無線信号を受信し、前記起点信号再生手段15が、前記受信手段33によって受信される無線信号から、前記測位要求信号に含まれる起点信号を再生し、
【0061】
前記同期発振手段13が、前記再生された起点信号と高精度でかつ短時間に同期を確立して同期を保持し、前記測定信号生成手段15が、前記同期発振手段の出力と同期しあるいは直交する距離測定信号と、前記距離測定信号とは別に、方向を測定するための方向測定信号とを生成し、前記発信手段34が、前記距離測定信号と方向測定信号を含む無線信号を、セル毎もしくはセクタ毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、前記複数の無線マーカ101a、101bに向けて時分割で発信し、前記複数の無線マーカ101a、101bから発信される起点信号と、前記移動端末103から発信される距離測定信号と方向測定信号とが、単一もしくは同期しあるいは直交する複数の、搬送波信号、副搬送波信号、変調信号、スペクトル拡散符号、もしくはこれらの組合せであり、
【0062】
前記移動端末103が、前記複数の無線マーカ101a、101bに向けて、少なくとも、システム同期信号と、識別信号と、測位起動要求信号とを含む無線信号をバースト信号として間欠発信し、前記複数の無線マーカ101a、101bが、前記移動端末103から発信された測位起動要求信号に対応し、前記移動端末に向けて、測位要求信号を含む無線信号を、セル毎もしくはセクタ毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、時分割で発信し、前記移動端末103が、前記複数の無線マーカ101a、101bから発信される測位要求信号に対応して、前記複数の無線マーカ101a、101bに向けて、少なくとも前記測位信号と方向測定信号とを含む無線信号を、セル毎もしくはセクタ毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、時分割で発信し、
【0063】
前記複数の無線マーカ101a、101bの内の少なくとも1つの無線マーカにおいて、前記測位信号の位相を測定して移動端末103からの距離を算出し、前記少なくとも1つの無線マーカの複数のアンテナ又は複数の送受波器21a〜21dに対応した方向測定信号の位相差を測定して移動端末103が位置する方向を算出し、前記距離の算出結果と、方向の算出結果とから、前記移動端末103の1次元〜3次元の何れかの次元の位置を高精度で測位する。
なお、前記のように移動端末103が歩行者によって携帯される場合、移動端末103から前記測位起動要求信号を含む無線信号を、0.5〜5秒の間隔で間欠的に発信することによって、移動端末103の電流消費を低く抑えることができる。
また、前記複数の無線マーカの内の特定の無線マーカをノードとして周辺の無線マーカとの間でアドホックネットワークを構成し、前記ノードを経由して外部の有線回線もしくは無線回線と接続し、少なくとも、前記移動端末の位置を測位するために必要な情報の交換を行なう。
【0064】
また、前記複数の無線マーカの内の特定の無線マーカ、あるいは前記複数の無線マーカとは別の無線マーカをノードとし、前記移動端末、複数の無線マーカ、あるいはこれらの両方から送信される無線信号を受信し、前記無線信号に含まれる起点信号を基準として、前記無線信号に含まれる距離測定信号の位相を測定し、双曲線航法によって、前記移動端末の位置を測位することができる。
また、前記複数の無線マーカの内の特定の無線マーカ、あるいは前記複数の無線マーカとは別の無線マーカをノードとし、前記移動端末、複数の無線マーカ、あるいはこれらの両方から送信される無線信号を受信し、前記無線信号に含まれる起点信号を基準として、前記無線信号に含まれる距離測定信号の位相を測定し、かつ前記無線信号に含まれる前記移動端末、複数の無線マーカ、あるいはこれらの両方が位置する方向を測定したデータを受信して、前記移動端末の位置を測位することができる。
【0065】
図4は、本発明の無線信号の構成例を示す図である。図4において、61a〜61gはシステム同期信号、62a〜62gはMACレイヤ、63aは前記移動端末103から間欠発信される起点信号含む測位要求信号、63bは前記無線マーカ101aで受信される測位要求信号、63cは前記無線マーカ101aに割当てられたタイムスロットから発信される距離測定信号と方向測定信号、63dは移動端末103で受信される距離測定信号と方向測定信号、63eは前記無線マーカ101bで受信される測位要求信号、63fは前記無線マーカ101bに割当てられたタイムスロットから発信される距離測定信号と方向測定信号、63gは移動端末103で受信される距離測定信号と方向測定信号、64は前記移動端末の時間軸、65は前記無線マーカ101aの時間軸、66は前記無線マーカ101bの時間軸である。なお、太線で囲った信号は、送信される信号を示し、その他の信号は受信される信号を示す。
【0066】
前記システム同期信号61a〜62gは複数ビットのユニークワードであり、±100ナノ秒程度の精度で前記移動端末103と複数の無線マーカ101a、101bとの間の制御タイミングを合わせることができるが、この程度の精度で時間差を測って距離を求めると、距離の測定誤差が数十mと大きくなる問題点がある。
前記MACレイヤ62a〜62gは、少なくとも、識別番号、相手先番号、報知信号、もしくはこれらの組合せから構成され、前記システム同期信号61a〜61gとセットになって生成される。
【0067】
前記測位要求信号に含まれる起点信号は、前記複数の無線マーカ101a、101bと、移動端末103との間で精密な同期を確立するための信号であり、単一もしくは同期しあるいは直交する複数の搬送波信号、副搬送波信号、変調信号、スペクトル拡散符号、もしくはこれらの何れかの組合せによる信号が用いられる。
一方、前記距離測定信号と方向測定信号は、正確な距離と方向の測定を行うための信号であり、単一もしくは同期しあるいは直交する複数の搬送波信号、副搬送波信号、変調信号、スペクトル拡散符号、もしくはこれらの何れかの組合せによる信号が用いられる。
【0068】
また、前記無線マーカ101a、101bから発信されるMACレイヤ62c、62fの継続時間を各々0.5ms程度とし、前記無線マーカ101a、101bから発信される距離測定信号と方向測定信号63c、63fの継続時間を各々0.5ms程度とし、システム同期信号の継続時間を無視すると、前記無線マーカ101a、101bから発信される無線信号の継続時間は合計で1ms程度となるので、前記無線マーカが8台設置され、8タイムスロットが各々の無線マーカに割当てられると、前記8台の無線マーカの継続時間は合計で8msとなる。
【0069】
また、前記無線マーカ101a、101bと移動端末103に搭載される基準発振器の周波数偏差を±0.5ppmとすると、8msの継続時間の間の周波数の変化は、起点信号の周波数を1MHzとすると、±0.5×(8/1000)Hzとなるので、同期発振器の同期保持誤差は、±360°×(4/1000)=±1.44°となり、距離の測定誤差は、±150m×(1.44°/360°)=±60cmとなる。
【0070】
図5は、本発明のタイミングチャートである。図5において、71aは移動端末103から発信される起点信号、71bは無線マーカ101aによって再生される起点信号、71cは無線マーカ101bによって再生される起点信号、72aは前記無線マーカ101aに向けて起点信号が伝搬する伝搬経路、72bは前記無線マーカ101bに向けて起点信号が伝搬する伝搬経路、73aは前記無線マーカ101aよって再生された起点信号と同期して生成される距離測定信号、73bは前記無線マーカ101bよって再生された起点信号と同期して生成される距離測定信号、74aは無線マーカ101aから距離測定信号が伝搬する伝搬経路、74bは無線マーカ101bから距離測定信号が伝搬する伝搬経路、
【0071】
75aは再生された無線マーカ101aからの距離測定信号、75bは再生された無線マーカ101bからの距離測定信号、76aは第1のタイムスロットまでの時間、76bは第2のタイムスロットまでの時間、77aは前記起点信号と無線マーカ101bから発信される距離測定信号との位相差、77bは前記起点信号と無線マーカ101aから発信される距離測定信号との位相差、81aは移動端末1の発信手段の時間軸、83a、83bは前移動端末103の受信手段の時間軸、81bは前記無線マーカ101aの受信手段の時間軸、82aは前記無線マーカ101aの発信手段の時間軸、81cは前記無線マーカ101aの受信手段の時間軸、82bは前記無線マーカ101bの発信手段の時間軸である。
【0072】
前記移動端末103から発信される前記起点信号71aをASin(2πf1t)とすると、前記起点信号71aが、距離La(m)の伝搬経路72aを伝搬し、前記無線マーカ101aによって受信され、起点信号71bとして再生されると、BSin{2πf1t+2πLa(f1/C)}に位相が変化する。
前記再生された起点信号71bと、同期確立誤差がゼロで同期した距離測定信号73aを生成すると、生成された測位信号73aは、同じくBSin{2πf1t+2πLa(f1/C)}で表される。
【0073】
前記時分割の間隔76a後に、前記生成された測位信号73aが、前記無線マーカ101aから発信され、再び、距離La(m)の伝搬経路74aを伝搬し、前記移動端末103で再生される距離測定信号75aは、CSin{2πf1t+4πLa(f1/C)}で表わされる。ここで、Cは光の速度とする。
そこで、前記移動端末103で生成された起点信号71aと同期しあるいは直交し、周波数が前記起点信号の整数倍のクロック信号を用い、前記再生された距離測定信号75aの位相を測定すると、前記移動端末103で生成された起点信号71aと前記移動端末103で再生された距離測定信号75aとの位相差77aが測定され、ΔΦ={4πLa(f1/C)}となることから、La={CΔΦ/4πf1}から、距離La(m)が算出できる。
【0074】
図6は、本発明の同期確立誤差関数生成手段の構成図である。図6において、11は基準発振器、12は位相同期発振器、27は誤差関数生成手段、51は移相手段、52a〜52nは移相手段51の切替タップ、53は切替制御手段、54、55、56は接続端子である。
前段の基準発振器11の出力信号を位相同期発振器12によって高い周波数に変換し、接続端子54を介して移相手段51に入力する。移相手段51は、複数段のシフトレジスタ、あるいは複数段の遅延素子、あるいは複数段の遅延回路などによって構成され、各段の信号出力は切替タップ52a〜52nによって引き出され、切替制御手段53によって順次切替えられ、高い周波数のクロック信号として接続端子56から外部(同期検出手段、同期発振手段など)に出力される。
【0075】
前記移相手段51の各段の移相量は極力小さいことが望ましく、かつ移相量の合計は、前記クロック信号の1周期以上であることが必要である。例えば、前記クロック信号の周波数が256MHzであるとすると、移相手段51の各段の移相量は4ナノ秒以下(例えば、0.4ナノ秒など)であり、かつ移相量の合計は4ナノ秒以上(例えば、6.4ナノ秒など)とする必要がある。
【0076】
上記の移相手段51が無い場合には、同期発振手段13の同期確立精度は±2ナノ秒であり、起点信号の周波数を1MHzとすると、距離の測定精度は、測位レンジの150mに対して、±30cmが限界となるが、上記の移相手段51を設け、各段に割付けられた移相量を0.4ナノ秒とし、算出した距離の平均値を求めると、測位精度を±15cmに改善することができる。
【0077】
なお、前記移相手段51は前記同期発振手段13に対して同期確立誤差関数を付与することになり、複数段のタップ52a〜52nの各段ごとに生じる同期確立誤差の合計を同期確立誤差関数として表現すれば、同期確立誤差関数は多項式によって表現でき、しかも前記多項式は0もしくは一定値に収斂することになる。
【0078】
図7は、本発明の同期確立誤差関数生成手段の他の構成図である。図7において、91、93は切替スイッチ、92a〜92nは複数組のカウンタあるいは複数組の数値制御発振器、94〜96は接続端子である。
接続端子94に供給される前記起点信号の立上り点、立下り点、もしくはゼロ交差点のタイミングから検出されたセットあるいはリセット信号は、切替スイッチ91によって順次切替えられ、前記複数組のカウンタあるいは複数組の数値制御発振器92a〜92nを順次セットしあるいはリセットする。
【0079】
一方、接続端子96には位相同期発振器12(記載せず)からクロック信号が供給され、前記セットあるいはリセット信号によるセットあるいはリセットのタイミングに同期して、前記複数組のカウンタ92a〜92nによって、通常、低い周波数へカウントダウンされる。
前記複数組のカウンタあるいは複数組の数値制御発振器92a〜92nによって生成された出力信号は、切替スイッチ93により順次切替えられ、接続端子95を経由して、前記距離測定信号生成手段15に供給される。
【0080】
ここで、前記位相同期発振器12から前記同期検出手段14に供給されるクロック信号の周波数もしくは位相と、前記再生した起点信号の周波数もしくは位相とは非相関とし、かつ/又は両者間の周波数もしくは位相の関係を前記起点信号を受信している時間内にランダムに変化させることができれば、前記複数組のカウンタあるいは複数組の数値制御発振器92a〜92nの同期確立誤差の間の相関係数を低く抑えられるので、前記距離測定信号の位相を測定して距離を算出した結果から平均値を求めることで、距離測定精度を改善できるメリットが得られる。
【0081】
言い換えれば、前記複数組のカウンタあるいは複数組の数値制御発振器92a〜92nの各々に対応して、前記同期検出手段14によって検出されるセットあるいはリセット信号の検出タイミングを変化させ、前記位相同期発振器23から供給されるクロック信号の複数ビットの時間間隔内で、各々異なったタイミングでセットしあるいはリセットすることが出来きれば、全体として、同期確立誤差の平均値が0もしくは一定値に収斂することになり、前記複数組のカウンタあるいは複数組の数値制御発振器92a〜92nを設けることによって、前記同期検出手段14へ供給するクロック信号の周波数を比較的に低く抑えても、高精度の測位が可能となる。
【0082】
なお、切替スイッチ91と93の切替タイミングは同一でなく、少なくとも、前記時分割の間隔で受発信を行うタイミングに合わせる必要がある。
また、前記複数組のカウンタを用いると、1組当たり8段程度以下のカウンタで済むことから、8組のカウンタを設けても、64段程度のカウンタで済むことから経済的な規模となる。
また、前記複数組のカウンタあるいは複数組の数値制御発振器92a〜92nの各組ごとに生じる同期確立誤差の合計を同期確立誤差関数として表現すれば、同期確立誤差関数は多項式によって表現でき、しかも前記多項式は0もしくは一定値に収斂することになる。
【0083】
一方、従来のように、アナログ式あるいはデジタル式の遅延手段を設けて折り返す場合には、例えば、時分割で受発信する場合の間隔が2ミリ秒であり、継続時間が1ミリ秒の場合、前記起点信号の周波数が1MHz程度であるとしても、特に、デジタル式の遅延手段の場合には、クロック信号の周波数を100MHz〜1000MHz以上に設定する必要があるので、大規模な遅延素子が必要となる。
ただし、前記の遅延手段の入力端子と出力端子の間に切替スイッチを設け、前記起点信号を読み込む場合には前記切替スイッチを切り離し、読み込み完了後にはリング状に接続し、読み出す場合には切り離すことで、少なくとも時分割で受発信する部分の間隔2ミリ秒分に必要な遅延時間を節約することができるメリットがある。
【0084】
以上の説明では無線信号として電波を用いる場合について述べたが、無線信号として超音波信号あるいは高周波信号あるいは光信号を含むことができる。なお、超音波信号あるいは光信号の場合には、アンテナの代わりに送受波器を用い、また、光信号の場合には比較的に周波数が高い副搬送波信号あるいは高いチップレートの拡散符号を用いるものとする。
また、UWB(ウルトラワイドバンド)方式を採用することで、比較的に高い周波数の変調信号を用いることが可能となり、直径30m以下のピコセルを構成して、近距離で高精度の1次元〜3次元の内のいずれかの次元の位置測位が可能となる。
【0085】
また、前記移動端末の受信手段、無線マーカの受信手段、あるいはこれらの両方が、複数のアンテナ又は複数の送受波器を設けて周期的に切替え、前記品質検知手段において、前記複数のアンテナ又は複数の送受波器に対応して距離を測定しあるいは算出した結果の内、距離を比較的に短く算出したものを選択し、平均し、荷重平均を行い、あるいはこれらの組み合わせを行うことによって、前記距離測定結果あるいは距離算出結果を補正しあるいは補完することができる。
また、前記無線マーカが擬似衛星局であり擬似GPS信号を発信する場合、従来のGPSと同様なBPSK変調の他に任意の変調方式が用いられ、あるいはC/AコードあるいはPコード以外にも任意のコード化が可能である。
【0086】
また、前記MACレイヤには、少なくとも前記発信手段の識別符号あるいは識別番号が含まれ、あるいは局情報が含まれ、あるいはテキスト情報が含まれ、あるいは時間率1%を越えない範囲で符号長を選択することができる。
また、前記無線マーカが単一のアンテナを有し、前記移動端末が複数のアンテナを搭載して周期的に切替えながら受信しあるいは発信することでも同様な効果が得られる。
また、前記セルを更に複数のセクタに分け、前記セクタ毎に無線マーカを設置することで、高精度の測位システムを実現できる。
【産業上の利用可能性】
【0087】
本発明は上記のように構成されているため、前記無線マーカを擬似衛星局として、屋内、屋外、あるいはこれらの両方に設置することで、屋外と屋内でGPSをシームレスにつなぐ高精度なセルラー式移動無線測位システムが経済的な方法で実現できる。
また、前記複数の無線マーカによってピコセルを構成して物流管理に応用すると、倉庫内の物品管理がどの場所のどの棚の何段目に収納しているが正確に記録できることになり、物流管理の効率化に役立だてることができる。
【0088】
また、前記無線マーカが、屋外あるいは屋内を問わず離散的に配置され、前記移動端末が歩行者によって携帯されると、歩行者の自律移動支援システム、あるいは歩行者ナビゲーションシステム、あるいは火災時もしくは災害時の避難・誘導システム、あるいは児童の見守りシステムなどに活用することができる他、ロボットの自律移動にも応用できる。
また、前記無線マーカを保護者が携帯し、前記移動端末を児童が携帯することによって、迷子の探索システムに応用ができる。他に忘れ物探索システム、徘徊老人探索、その他にも応用できる。
また、本発明のセルラー式移動無線測位技術は基盤技術であり、他の多くの分野での活用が期待できる。
【図面の簡単な説明】
【0089】
【図1】本発明のセルラー式移動無線測位システムの構成図
【図2】本発明の実施の形態1によるセルラー式移動無線測位システムの構成図
【図3】本発明の実施の形態2によるセルラー式移動無線測位システムの構成図
【図4】本発明の無線信号の構成を示す図
【図5】本発明のタイミングチャート
【図6】本発明の同期確立誤差関数生成手段の構成図
【図7】本発明の同期確立誤差関数生成手段の他の構成図
【図8】従来の実施例を示す構成図
【符号の説明】
【0090】
1 RTK測位システム
2 発信手段または擬似衛星局
3 固定基準局受信手段
4 移動基準局受信手段
5 ローバー受信手段
6 利用者処理ユニットまたは受信手段
7 データリンク
101a、101b セル毎もしくはセクタ毎に配置された複数の無線マーカ
21a〜21d アンテナ
103 移動端末
104a、104b 複数の無線マーカと移動端末との間の距離
105a、105b 複数の無線マーカから見た移動端末の方向
【特許請求の範囲】
【請求項1】
超音波信号あるいは高周波信号あるいは光信号である無線信号を用いるセルラー式移動無線測位システムにおいて、
前記無線信号を移動しながら時分割で発信し受信するための移動端末と、セル毎に配置され位置の基準となる複数の無線マーカと
から構成され、
前記移動端末が、少なくとも、
アンテナ切替手段と、起点信号生成手段と、発信手段と、受信手段と、測定信号再生手段と、位相測定手段と、位置算出手段と
を有し、
前記アンテナ切替手段が、アンテナ又は送受波器を発信手段又は受信手段の何れかに時分割で切替え、
前記起点信号生成手段が、少なくとも、システム同期信号と、識別信号と、起点信号を含む測位要求信号とを生成し、
前記発信手段が、前記測位要求信号を含む無線信号を前記複数の無線マーカに向けてバースト信号として発信し、
前記受信手段が、前記複数の無線マーカから発信される無線信号を受信し、
前記測定信号再生手段が、前記受信手段によって受信される無線信号から、距離測定信号と方向測定信号とを再生し、
前記位相測定手段が、前記再生された距離測定信号と方向測定信号との位相を測定し、
前記位置算出手段が、前記位相の測定結果から自局の位置を測位し、
前記複数の無線マーカが、少なくとも、
アンテナ切替手段と、受信手段と、起点信号再生手段と、同期発振手段と、測定信号生成手段と、発信手段と
を有し、
前記アンテナ切替手段が、複数のアンテナ又は複数の送受波器を周期的に切替え、かつ発信手段又は受信手段の何れかに時分割で切替え、
前記受信手段が、前記移動端末から発信される測位要求信号を含む無線信号を受信し、
前記起点信号再生手段が、前記受信手段によって受信される無線信号から測位要求信号に含まれる起点信号を再生し、
前記同期発振手段が、前記再生された起点信号と高精度でかつ短時間に同期を確立して同期を保持し、
前記測定信号生成手段が、前記同期発振手段の出力と同期しあるいは直交する距離測定信号と、前記距離測定信号とは別に、方向を測定するための方向測定信号とを生成し、
前記発信手段が、前記距離測定信号と方向測定信号を含む無線信号を、セル毎もしくはセクタ毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、複数のアンテナ又は複数の送受波器を周期的に切替えながら、前記移動端末に向けて時分割で発信し、
前記移動端末から発信される起点信号と、前記複数の無線マーカから発信される距離測定信号と方向測定信号とが、単一もしくは同期しあるいは直交する複数の、搬送波信号、副搬送波信号、変調信号、スペクトル拡散符号、もしくはこれらの組合せであり、
前記移動端末において、前記距離測定信号の位相を測定して少なくとも1つの無線マーカからの距離を算出し、前記少なくとも1つの無線マーカの複数のアンテナ又は複数の送受波器に対応した方向測定信号の位相差を測定して前記少なくとも1つの無線マーカが位置する方向を算出し、
前記距離の算出結果と、方向の算出結果とから、前記移動端末の1次元〜3次元の内の何れかの次元の位置を高精度で測位する
ことを特徴とするセルラー式移動無線測位システム。
【請求項2】
超音波信号あるいは高周波信号あるいは光信号である無線信号を用いるセルラー式移動無線測位システムにおいて、
前記無線信号を移動しながら時分割で発信し受信するための移動端末と、セル毎に配置され位置の基準となる複数の無線マーカと
から構成され、
前記複数の無線マーカが、少なくとも、
アンテナ切替手段と、受信手段と、起点信号生成手段と、発信手段と、測定信号再生手段と、位相測定手段と、位置算出手段と
を有し、
前記アンテナ切替手段が、複数の指向性アンテナ又は複数の指向性送受波器を周期的に切替え、かつ発信手段又は受信手段の何れかに時分割で切替え、
前記受信手段が、前記移動端末から発信される測位起動要求信号を受信し、
前記起点信号生成手段が、前記測位起動要求信号に対応して、少なくとも、システム同期信号と、識別信号と、起点信号を含む測位要求信号とを生成し、
前記発信手段が、前記起点信号を含む無線信号を、前記移動端末に向けて、セル毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、バースト信号として発信し、
前記受信手段が、前記測位要求信号に応答して前記移動端末から発信される無線信号を、セル毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、複数のアンテナ又は複数の送受波器を周期的に切替えながら、時分割で受信し、
前記測定信号再生手段が、前記受信手段によって受信される無線信号から、距離測定信号と方向測定信号とを再生し、
前記位相測定手段が、前記再生された距離測定信号と方向測定信号との位相を測定し、
前記位置算出手段が、前記位相の測定結果から移動端末の位置を測位し、
前記移動端末が、少なくとも、
アンテナ切替手段と、受信手段と、測位起動要求信号生成手段と、起点信号再生手段と、同期発振手段と、測定信号生成手段と、発信手段と
を有し、
前記アンテナ切替手段が、アンテナ又は送受波器を発信手段又は受信手段の何れかに時分割で切替え、
前記測位起動要求信号生成手段が、少なくとも、システム同期信号と、識別信号と、測位起動要求信号とを生成し、
前記発信手段が、前記測位起動要求信号を含む無線信号を間欠発信し、
前記受信手段が、前記複数の無線マーカからセル毎もしくはセクタ毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、発信される無線信号を受信し、
前記起点信号再生手段が、前記受信手段によって受信される無線信号から、測位要求信号に含まれる起点信号を再生し、
前記同期発振手段が、前記再生された起点信号と高精度でかつ短時間に同期を確立して同期を保持し、
前記測定信号生成手段が、前記同期発振手段の出力と同期しあるいは直交する距離測定信号と、前記距離測定信号とは別に、方向を測定するための方向測定信号とを生成し、
前記発信手段が、前記距離測定信号と方向測定信号を含む無線信号を、セル毎もしくはセクタ毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、前記複数の無線マーカに向けて時分割で発信し、
前記複数の無線マーカから発信される起点信号と、前記移動端末から発信される距離測定信号と方向測定信号とが、単一もしくは同期しあるいは直交する複数の、搬送波信号、副搬送波信号、変調信号、スペクトル拡散符号、もしくはこれらの組合せであり、
前記移動端末が、前記複数の無線マーカに向けて、少なくとも、システム同期信号と、識別信号と、測位起動要求信号とを含む無線信号をバースト信号として間欠発信し、
前記複数の無線マーカが、前記移動端末から発信された測位起動要求信号に対応し、前記移動端末に向けて、測位要求信号を含む無線信号を、セル毎もしくはセクタ毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、時分割で発信し、
前記移動端末が、前記複数の無線マーカから発信される測位要求信号に対応して、前記複数の無線マーカに向けて、少なくとも前記測位信号と方向測定信号とを含む無線信号を、セル毎もしくはセクタ毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、時分割で発信し、
前記複数の無線マーカにおいて、前記測位信号の位相を測定して移動端末からの距離を算出し、前記複数のアンテナ又は複数の送受波器に対応した方向測定信号の位相差を測定して移動端末が位置する方向を算出し、
前記距離の算出結果と、方向の算出結果とから、前記移動端末の1次元〜3次元の内の何れかの次元の位置を高精度で測位する
ことを特徴とするセルラー式移動無線測位システム。
【請求項3】
前記起点信号再生手段もしくは測定信号再生手段において、前記再生する起点信号もしくは測定信号が、無線信号の搬送波信号あるいは副搬送波信号である場合には、群遅延歪みの少ない帯域通過フイルタを通し、あるいは無線信号を変調した変調信号である場合には、遅延誤差の少ないアナログ復調器もしくは高い周波数のクロック信号を用いる遅延誤差の少ないデジタル復調器によって復調した後に、前記帯域通過フイルタを通して再生することを特徴とする請求項第1項あるいは第2項に記載のセルラー式移動無線測位システム。
【請求項4】
前記複数の無線マーカあるいは移動端末の同期発振手段が、基準発振器もしくは位相同期発振器によって駆動されるセットあるいはリセット付きのカウンタあるいは数値制御発振器によって構成され、前記受信機によって受信され信号再生手段によって復調されもしくは再生された起点信号の立上がり点、立下がり点、もしくはゼロ交差点のタイミングを、同期検出手段によって少なくとも16MHz以上の周波数のクロック信号を用いて検出し、前記同期検出手段が検出したタイミングで、前記カウンタあるいは数値制御発振器をセットしもしくはリセットすることによって、前記同期発振手段が起点信号と短時間で同期を確立し、同期を保持できることを特徴とする請求項第1項あるいは第2項に記載のセルラー式移動無線測位システム。
【請求項5】
前記複数の無線マーカあるいは移動端末の同期発振手段と、前記復調されもしくは再生された起点信号との間の同期確立誤差を低減し、高精度でかつ短時間に同期を確立させるために、前記移動端末、前記複数の無線マーカ、あるいはこれらの両方に同期確立誤差関数を付与し、前記同期確立誤差関数が前記同期確立誤差を限りなくゼロに近づける特性を有することを特徴とする請求項第1項あるいは第2項に記載のセルラー式移動無線測位システム。
【請求項6】
前記複数の無線マーカあるいは移動端末の同期検出手段に前記同期確立誤差関数を付与するために、前記位相同期発振器のクロック信号出力の位相をシフトさせるための複数組の移相手段と、前記複数組の移相手段によって各々異なった位相にシフトされた複数組のクロック信号を選択して外部に出力するためのタイミング制御手段とを設け、前記移相手段の移相量の合計を、前記クロック信号の一周期の間隔よりも大きく設定することによって、距離の算出精度を向上させることを特徴とする請求項第5項に記載のセルラー式移動無線測位システム。
【請求項7】
前記複数の無線マーカあるいは移動端末の同期発振手段に前記同期確立誤差関数を付与するために、前記同期発振手段が複数組のカウンタあるいは複数組の数値制御発振器を有し、前記複数組のカウンタあるいは複数組の数値制御発振器が、前記再生された起点信号と各々異なった複数のタイミングで切替手段によって切替えられて同期を確立し、前記複数組のカウンタあるいは複数組の数値制御発振器から出力される出力信号を異なった複数のタイミングで選択手段によって選択し、前記選択された出力信号に同期しもしくは直交した単一もしくは複数の距離測定信号を生成して前記移動端末あるいは複数の無線マーカに向けて発信し、前記移動端末あるいは複数の無線マーカの信号処理手段において、前記複数のタイミングに対応して算出した距離の平均値を求めることによって、距離の算出精度を向上させることを特徴とする請求項第5項に記載のセルラー式移動無線測位システム。
【請求項8】
前記複数の無線マーカあるいは移動端末から発信され、あるいは前記複数の無線マーカあるいは移動端末によって受信される起点信号に前記同期確立誤差関数を付与するために、前記無線マーカの複数のアンテナ又は複数の送受波器を周期的に切替ながら、前記起点信号を発信しあるいは受信し、距離の算出精度を向上させることを特徴とする請求項第5項に記載のセルラー式移動無線測位システム。
【請求項9】
前記移動端末あるいは複数の無線マーカの位相測定手段が積和演算器を有し、前記積和演算器のSinのルックアップテーブルとして0、1、0、−1、もしくは1、1、−1、−1、もしくはこれらの整数倍の繰り返しとし、Cosのルックアップテーブルとして1、0、−1、0、もしくは1、−1、−1、1、もしくはこれらの整数倍の繰り返しとして積和演算する。なお、積和演算を行う際の1との乗算は前記デジタル信号と同じ値であり、−1との乗算は前記デジタル信号の補数を求めることであり、0との剰算は0であり、前記積和演算器を単純化でき、しかも高速で、リアルタイムの演算が可能となることを特徴とする請求項第1項あるいは第2項に記載のセルラー式移動無線測位システム。
【請求項10】
前記無線マーカの複数のアンテナ又は複数の送受波器が指向性を有し、前記指向性の方向を下方向もしくは斜め下方向もしくは水平方向に向けて、前記方向測定信号の0.5波長から2波長の間隔で配置することを特徴とする請求項第1項あるいは第2項に記載のセルラー式移動無線測位システム。
【請求項11】
前記セルを更に複数のセクタに分け、前記セクタ毎に無線マーカを設置することを特徴とする請求項第1項あるいは第2項に記載のセルラー式移動無線測位システム。
【請求項12】
前記移動端末の受信手段、無線マーカの受信手段、あるいはこれらの両方が、伝搬経路の品質を検知する品質検知手段を有し、前記品質検知手段が、前記受信手段において受信した無線信号の電力あるいは信号対雑音比を測定した結果から回線品質を分析し、前記位相測定手段で距離測定信号の位相あるいは方向測定信号の位相差を測定した結果から距離測定精度あるいは方向測定精度を分析し、あるいはこれらの分析の両方を行い、前記距離測定処理、方向測定処理、あるいはこれらの両方の結果を補正しあるいは補完することを特徴とする請求項第1項から第11項までのいずれかに該当するセルラー式移動無線測位システム。
【請求項13】
前記移動端末の受信手段、無線マーカの受信手段、あるいはこれらの両方が、複数のアンテナ又は複数の送受波器を設けて周期的に切替え、前記品質検知手段において、前記複数のアンテナ又は複数の送受波器に対応して距離を測定しあるいは算出した結果の内、距離を比較的に短く算出したものを選択し、平均し、荷重平均を行い、あるいはこれらの組み合わせを行うことによって、前記距離測定結果あるいは距離算出結果を補正しあるいは補完することを特徴とする請求項第1項あるいは第2項に記載のセルラー式移動無線測位システム。
【請求項14】
前記複数の無線マーカの内の特定の無線マーカ、あるいは前記複数の無線マーカとは別の無線マーカをノードとし、前記複数の無線マーカとの間でアドホックネットワークを構成し、前記ノードを経由して外部の有線回線もしくは無線回線と接続し、少なくとも、前記移動端末の位置を測位するために必要な情報の交換を行なうことを特徴とする請求項第1項あるいは第2項に記載のセルラー式移動無線測位システム。
【請求項15】
前記複数の無線マーカの内の特定の無線マーカ、あるいは前記複数の無線マーカとは別の無線マーカをノードとし、前記移動端末、複数の無線マーカ、あるいはこれらの両方から送信される無線信号を受信し、前記無線信号に含まれる起点信号を基準として、前記無線信号に含まれる距離測定信号の位相を測定し、双曲線航法によって、前記移動端末の位置を測位することを特徴とする請求項第1項あるいは第2項に記載のセルラー式移動無線測位システム。
【請求項16】
前記複数の無線マーカの内の特定の無線マーカ、あるいは前記複数の無線マーカとは別の無線マーカをノードとし、前記移動端末、複数の無線マーカ、あるいはこれらの両方から送信される無線信号を受信し、前記無線信号に含まれる起点信号を基準として、前記無線信号に含まれる距離測定信号の位相を測定し、かつ前記無線信号に含まれる前記移動端末、複数の無線マーカ、あるいはこれらの両方が位置する方向を測定したデータを受信して、前記移動端末の位置を測位することを特徴とする請求項第1項あるいは第2項に記載のセルラー式移動無線測位システム。
【請求項17】
前記無線信号の周波数として、GPSに割当てられた周波数、あるいはその近傍の周波数を割当て、前記複数の無線マーカから発信される無線信号の占有率を20%以下とすることで、屋外と屋内でGPSをシームレスに接続することを特徴とする請求項第1項あるいは第2項に記載のセルラー式移動無線測位システム。
【請求項1】
超音波信号あるいは高周波信号あるいは光信号である無線信号を用いるセルラー式移動無線測位システムにおいて、
前記無線信号を移動しながら時分割で発信し受信するための移動端末と、セル毎に配置され位置の基準となる複数の無線マーカと
から構成され、
前記移動端末が、少なくとも、
アンテナ切替手段と、起点信号生成手段と、発信手段と、受信手段と、測定信号再生手段と、位相測定手段と、位置算出手段と
を有し、
前記アンテナ切替手段が、アンテナ又は送受波器を発信手段又は受信手段の何れかに時分割で切替え、
前記起点信号生成手段が、少なくとも、システム同期信号と、識別信号と、起点信号を含む測位要求信号とを生成し、
前記発信手段が、前記測位要求信号を含む無線信号を前記複数の無線マーカに向けてバースト信号として発信し、
前記受信手段が、前記複数の無線マーカから発信される無線信号を受信し、
前記測定信号再生手段が、前記受信手段によって受信される無線信号から、距離測定信号と方向測定信号とを再生し、
前記位相測定手段が、前記再生された距離測定信号と方向測定信号との位相を測定し、
前記位置算出手段が、前記位相の測定結果から自局の位置を測位し、
前記複数の無線マーカが、少なくとも、
アンテナ切替手段と、受信手段と、起点信号再生手段と、同期発振手段と、測定信号生成手段と、発信手段と
を有し、
前記アンテナ切替手段が、複数のアンテナ又は複数の送受波器を周期的に切替え、かつ発信手段又は受信手段の何れかに時分割で切替え、
前記受信手段が、前記移動端末から発信される測位要求信号を含む無線信号を受信し、
前記起点信号再生手段が、前記受信手段によって受信される無線信号から測位要求信号に含まれる起点信号を再生し、
前記同期発振手段が、前記再生された起点信号と高精度でかつ短時間に同期を確立して同期を保持し、
前記測定信号生成手段が、前記同期発振手段の出力と同期しあるいは直交する距離測定信号と、前記距離測定信号とは別に、方向を測定するための方向測定信号とを生成し、
前記発信手段が、前記距離測定信号と方向測定信号を含む無線信号を、セル毎もしくはセクタ毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、複数のアンテナ又は複数の送受波器を周期的に切替えながら、前記移動端末に向けて時分割で発信し、
前記移動端末から発信される起点信号と、前記複数の無線マーカから発信される距離測定信号と方向測定信号とが、単一もしくは同期しあるいは直交する複数の、搬送波信号、副搬送波信号、変調信号、スペクトル拡散符号、もしくはこれらの組合せであり、
前記移動端末において、前記距離測定信号の位相を測定して少なくとも1つの無線マーカからの距離を算出し、前記少なくとも1つの無線マーカの複数のアンテナ又は複数の送受波器に対応した方向測定信号の位相差を測定して前記少なくとも1つの無線マーカが位置する方向を算出し、
前記距離の算出結果と、方向の算出結果とから、前記移動端末の1次元〜3次元の内の何れかの次元の位置を高精度で測位する
ことを特徴とするセルラー式移動無線測位システム。
【請求項2】
超音波信号あるいは高周波信号あるいは光信号である無線信号を用いるセルラー式移動無線測位システムにおいて、
前記無線信号を移動しながら時分割で発信し受信するための移動端末と、セル毎に配置され位置の基準となる複数の無線マーカと
から構成され、
前記複数の無線マーカが、少なくとも、
アンテナ切替手段と、受信手段と、起点信号生成手段と、発信手段と、測定信号再生手段と、位相測定手段と、位置算出手段と
を有し、
前記アンテナ切替手段が、複数の指向性アンテナ又は複数の指向性送受波器を周期的に切替え、かつ発信手段又は受信手段の何れかに時分割で切替え、
前記受信手段が、前記移動端末から発信される測位起動要求信号を受信し、
前記起点信号生成手段が、前記測位起動要求信号に対応して、少なくとも、システム同期信号と、識別信号と、起点信号を含む測位要求信号とを生成し、
前記発信手段が、前記起点信号を含む無線信号を、前記移動端末に向けて、セル毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、バースト信号として発信し、
前記受信手段が、前記測位要求信号に応答して前記移動端末から発信される無線信号を、セル毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、複数のアンテナ又は複数の送受波器を周期的に切替えながら、時分割で受信し、
前記測定信号再生手段が、前記受信手段によって受信される無線信号から、距離測定信号と方向測定信号とを再生し、
前記位相測定手段が、前記再生された距離測定信号と方向測定信号との位相を測定し、
前記位置算出手段が、前記位相の測定結果から移動端末の位置を測位し、
前記移動端末が、少なくとも、
アンテナ切替手段と、受信手段と、測位起動要求信号生成手段と、起点信号再生手段と、同期発振手段と、測定信号生成手段と、発信手段と
を有し、
前記アンテナ切替手段が、アンテナ又は送受波器を発信手段又は受信手段の何れかに時分割で切替え、
前記測位起動要求信号生成手段が、少なくとも、システム同期信号と、識別信号と、測位起動要求信号とを生成し、
前記発信手段が、前記測位起動要求信号を含む無線信号を間欠発信し、
前記受信手段が、前記複数の無線マーカからセル毎もしくはセクタ毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、発信される無線信号を受信し、
前記起点信号再生手段が、前記受信手段によって受信される無線信号から、測位要求信号に含まれる起点信号を再生し、
前記同期発振手段が、前記再生された起点信号と高精度でかつ短時間に同期を確立して同期を保持し、
前記測定信号生成手段が、前記同期発振手段の出力と同期しあるいは直交する距離測定信号と、前記距離測定信号とは別に、方向を測定するための方向測定信号とを生成し、
前記発信手段が、前記距離測定信号と方向測定信号を含む無線信号を、セル毎もしくはセクタ毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、前記複数の無線マーカに向けて時分割で発信し、
前記複数の無線マーカから発信される起点信号と、前記移動端末から発信される距離測定信号と方向測定信号とが、単一もしくは同期しあるいは直交する複数の、搬送波信号、副搬送波信号、変調信号、スペクトル拡散符号、もしくはこれらの組合せであり、
前記移動端末が、前記複数の無線マーカに向けて、少なくとも、システム同期信号と、識別信号と、測位起動要求信号とを含む無線信号をバースト信号として間欠発信し、
前記複数の無線マーカが、前記移動端末から発信された測位起動要求信号に対応し、前記移動端末に向けて、測位要求信号を含む無線信号を、セル毎もしくはセクタ毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、時分割で発信し、
前記移動端末が、前記複数の無線マーカから発信される測位要求信号に対応して、前記複数の無線マーカに向けて、少なくとも前記測位信号と方向測定信号とを含む無線信号を、セル毎もしくはセクタ毎に配置された無線マーカに予め割当てられた周波数、タイムスロット、もしくはこれらの両方で、時分割で発信し、
前記複数の無線マーカにおいて、前記測位信号の位相を測定して移動端末からの距離を算出し、前記複数のアンテナ又は複数の送受波器に対応した方向測定信号の位相差を測定して移動端末が位置する方向を算出し、
前記距離の算出結果と、方向の算出結果とから、前記移動端末の1次元〜3次元の内の何れかの次元の位置を高精度で測位する
ことを特徴とするセルラー式移動無線測位システム。
【請求項3】
前記起点信号再生手段もしくは測定信号再生手段において、前記再生する起点信号もしくは測定信号が、無線信号の搬送波信号あるいは副搬送波信号である場合には、群遅延歪みの少ない帯域通過フイルタを通し、あるいは無線信号を変調した変調信号である場合には、遅延誤差の少ないアナログ復調器もしくは高い周波数のクロック信号を用いる遅延誤差の少ないデジタル復調器によって復調した後に、前記帯域通過フイルタを通して再生することを特徴とする請求項第1項あるいは第2項に記載のセルラー式移動無線測位システム。
【請求項4】
前記複数の無線マーカあるいは移動端末の同期発振手段が、基準発振器もしくは位相同期発振器によって駆動されるセットあるいはリセット付きのカウンタあるいは数値制御発振器によって構成され、前記受信機によって受信され信号再生手段によって復調されもしくは再生された起点信号の立上がり点、立下がり点、もしくはゼロ交差点のタイミングを、同期検出手段によって少なくとも16MHz以上の周波数のクロック信号を用いて検出し、前記同期検出手段が検出したタイミングで、前記カウンタあるいは数値制御発振器をセットしもしくはリセットすることによって、前記同期発振手段が起点信号と短時間で同期を確立し、同期を保持できることを特徴とする請求項第1項あるいは第2項に記載のセルラー式移動無線測位システム。
【請求項5】
前記複数の無線マーカあるいは移動端末の同期発振手段と、前記復調されもしくは再生された起点信号との間の同期確立誤差を低減し、高精度でかつ短時間に同期を確立させるために、前記移動端末、前記複数の無線マーカ、あるいはこれらの両方に同期確立誤差関数を付与し、前記同期確立誤差関数が前記同期確立誤差を限りなくゼロに近づける特性を有することを特徴とする請求項第1項あるいは第2項に記載のセルラー式移動無線測位システム。
【請求項6】
前記複数の無線マーカあるいは移動端末の同期検出手段に前記同期確立誤差関数を付与するために、前記位相同期発振器のクロック信号出力の位相をシフトさせるための複数組の移相手段と、前記複数組の移相手段によって各々異なった位相にシフトされた複数組のクロック信号を選択して外部に出力するためのタイミング制御手段とを設け、前記移相手段の移相量の合計を、前記クロック信号の一周期の間隔よりも大きく設定することによって、距離の算出精度を向上させることを特徴とする請求項第5項に記載のセルラー式移動無線測位システム。
【請求項7】
前記複数の無線マーカあるいは移動端末の同期発振手段に前記同期確立誤差関数を付与するために、前記同期発振手段が複数組のカウンタあるいは複数組の数値制御発振器を有し、前記複数組のカウンタあるいは複数組の数値制御発振器が、前記再生された起点信号と各々異なった複数のタイミングで切替手段によって切替えられて同期を確立し、前記複数組のカウンタあるいは複数組の数値制御発振器から出力される出力信号を異なった複数のタイミングで選択手段によって選択し、前記選択された出力信号に同期しもしくは直交した単一もしくは複数の距離測定信号を生成して前記移動端末あるいは複数の無線マーカに向けて発信し、前記移動端末あるいは複数の無線マーカの信号処理手段において、前記複数のタイミングに対応して算出した距離の平均値を求めることによって、距離の算出精度を向上させることを特徴とする請求項第5項に記載のセルラー式移動無線測位システム。
【請求項8】
前記複数の無線マーカあるいは移動端末から発信され、あるいは前記複数の無線マーカあるいは移動端末によって受信される起点信号に前記同期確立誤差関数を付与するために、前記無線マーカの複数のアンテナ又は複数の送受波器を周期的に切替ながら、前記起点信号を発信しあるいは受信し、距離の算出精度を向上させることを特徴とする請求項第5項に記載のセルラー式移動無線測位システム。
【請求項9】
前記移動端末あるいは複数の無線マーカの位相測定手段が積和演算器を有し、前記積和演算器のSinのルックアップテーブルとして0、1、0、−1、もしくは1、1、−1、−1、もしくはこれらの整数倍の繰り返しとし、Cosのルックアップテーブルとして1、0、−1、0、もしくは1、−1、−1、1、もしくはこれらの整数倍の繰り返しとして積和演算する。なお、積和演算を行う際の1との乗算は前記デジタル信号と同じ値であり、−1との乗算は前記デジタル信号の補数を求めることであり、0との剰算は0であり、前記積和演算器を単純化でき、しかも高速で、リアルタイムの演算が可能となることを特徴とする請求項第1項あるいは第2項に記載のセルラー式移動無線測位システム。
【請求項10】
前記無線マーカの複数のアンテナ又は複数の送受波器が指向性を有し、前記指向性の方向を下方向もしくは斜め下方向もしくは水平方向に向けて、前記方向測定信号の0.5波長から2波長の間隔で配置することを特徴とする請求項第1項あるいは第2項に記載のセルラー式移動無線測位システム。
【請求項11】
前記セルを更に複数のセクタに分け、前記セクタ毎に無線マーカを設置することを特徴とする請求項第1項あるいは第2項に記載のセルラー式移動無線測位システム。
【請求項12】
前記移動端末の受信手段、無線マーカの受信手段、あるいはこれらの両方が、伝搬経路の品質を検知する品質検知手段を有し、前記品質検知手段が、前記受信手段において受信した無線信号の電力あるいは信号対雑音比を測定した結果から回線品質を分析し、前記位相測定手段で距離測定信号の位相あるいは方向測定信号の位相差を測定した結果から距離測定精度あるいは方向測定精度を分析し、あるいはこれらの分析の両方を行い、前記距離測定処理、方向測定処理、あるいはこれらの両方の結果を補正しあるいは補完することを特徴とする請求項第1項から第11項までのいずれかに該当するセルラー式移動無線測位システム。
【請求項13】
前記移動端末の受信手段、無線マーカの受信手段、あるいはこれらの両方が、複数のアンテナ又は複数の送受波器を設けて周期的に切替え、前記品質検知手段において、前記複数のアンテナ又は複数の送受波器に対応して距離を測定しあるいは算出した結果の内、距離を比較的に短く算出したものを選択し、平均し、荷重平均を行い、あるいはこれらの組み合わせを行うことによって、前記距離測定結果あるいは距離算出結果を補正しあるいは補完することを特徴とする請求項第1項あるいは第2項に記載のセルラー式移動無線測位システム。
【請求項14】
前記複数の無線マーカの内の特定の無線マーカ、あるいは前記複数の無線マーカとは別の無線マーカをノードとし、前記複数の無線マーカとの間でアドホックネットワークを構成し、前記ノードを経由して外部の有線回線もしくは無線回線と接続し、少なくとも、前記移動端末の位置を測位するために必要な情報の交換を行なうことを特徴とする請求項第1項あるいは第2項に記載のセルラー式移動無線測位システム。
【請求項15】
前記複数の無線マーカの内の特定の無線マーカ、あるいは前記複数の無線マーカとは別の無線マーカをノードとし、前記移動端末、複数の無線マーカ、あるいはこれらの両方から送信される無線信号を受信し、前記無線信号に含まれる起点信号を基準として、前記無線信号に含まれる距離測定信号の位相を測定し、双曲線航法によって、前記移動端末の位置を測位することを特徴とする請求項第1項あるいは第2項に記載のセルラー式移動無線測位システム。
【請求項16】
前記複数の無線マーカの内の特定の無線マーカ、あるいは前記複数の無線マーカとは別の無線マーカをノードとし、前記移動端末、複数の無線マーカ、あるいはこれらの両方から送信される無線信号を受信し、前記無線信号に含まれる起点信号を基準として、前記無線信号に含まれる距離測定信号の位相を測定し、かつ前記無線信号に含まれる前記移動端末、複数の無線マーカ、あるいはこれらの両方が位置する方向を測定したデータを受信して、前記移動端末の位置を測位することを特徴とする請求項第1項あるいは第2項に記載のセルラー式移動無線測位システム。
【請求項17】
前記無線信号の周波数として、GPSに割当てられた周波数、あるいはその近傍の周波数を割当て、前記複数の無線マーカから発信される無線信号の占有率を20%以下とすることで、屋外と屋内でGPSをシームレスに接続することを特徴とする請求項第1項あるいは第2項に記載のセルラー式移動無線測位システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2011−149808(P2011−149808A)
【公開日】平成23年8月4日(2011.8.4)
【国際特許分類】
【出願番号】特願2010−11213(P2010−11213)
【出願日】平成22年1月21日(2010.1.21)
【出願人】(395007299)有限会社アール・シー・エス (51)
【出願人】(000211307)中国電力株式会社 (6,505)
【Fターム(参考)】
【公開日】平成23年8月4日(2011.8.4)
【国際特許分類】
【出願日】平成22年1月21日(2010.1.21)
【出願人】(395007299)有限会社アール・シー・エス (51)
【出願人】(000211307)中国電力株式会社 (6,505)
【Fターム(参考)】
[ Back to top ]