
センサの性能確認装置および方法
【課題】故障センサの検出、識別、推定、再構成および分類のための新しい装置と方法を提供する。
【解決手段】プロセスを測定するセンサに発生する故障を検出し、識別し、分類するための装置と方法が開示される。1つまたは複数のセンサにおいて故障を識別すると、この装置と方法は故障センサに対し代替値を提供して、これらのセンサを使用するすべてのプロセスコントローラおよびプロセスモニタリングシステムが故障期間中に運転を続行できるようにする。故障センサの識別は、センサの特定サブセットを感知しないと同時に、上記サブセット外のセンサに最高の感度をもつように特有に設計される、セットの構造化残差変換によって達成される。識別された故障は、完全な故障、バイアス、ドリフト、精度劣化、または不明のいずれかに分類される。
【解決手段】プロセスを測定するセンサに発生する故障を検出し、識別し、分類するための装置と方法が開示される。1つまたは複数のセンサにおいて故障を識別すると、この装置と方法は故障センサに対し代替値を提供して、これらのセンサを使用するすべてのプロセスコントローラおよびプロセスモニタリングシステムが故障期間中に運転を続行できるようにする。故障センサの識別は、センサの特定サブセットを感知しないと同時に、上記サブセット外のセンサに最高の感度をもつように特有に設計される、セットの構造化残差変換によって達成される。識別された故障は、完全な故障、バイアス、ドリフト、精度劣化、または不明のいずれかに分類される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、一般にプロセス変数を測定するためにセンサを使用するプロセスコントローラおよびプロセス監視システムに関するものである。特に本発明は、1つまたは複数のセンサの故障を検出・識別し、センサの故障のタイプを分類し、エラーのあるセンサ値を正しいプロセス変数値の推定値に代替するシステムに関するものである。
【背景技術】
【0002】
センサの性能確認は、プロセス工業における多くのモデルをベースとする用途に対する重要なステップである。典型的なモデルをベースとする用途には、モデル予測制御用途(MPC)および、実験室サンプルまたはハードウェアアナライザから得られるコストがかかるか頻度の少ない測定を、モデルから定期的に得られる推定値に代替する推定検知利用が含まれる。
【0003】
一般的なMPC用途では、定常状態最適化を実行して、制御また操作される変数に対する最適目標値を見出す。センサが故障している場合は、最適化した目標値は無効になる。したがって有効なセンサは、たとえ故障しても最良の再構成により制御システムをオンラインに維持する。
【0004】
代表的な推定センサ用途は、予測排出監視システム(PEMS)の分野である。連邦および/または州の法規は、大気汚染プラントに対し窒素酸化物(NOx)、酸素(O2)および一酸化炭素(CO)などの排出を監視することを要求することができる。ハードウエア連続排出監視システム(CEMS)は、イニシャルコストとメンテナンスコストの両者において高い負担が必要である。PEMSに充分に精度と信頼性があることが明らかならば、CEMSをPEMSに置き換えることができる。PEMSに対する品質保証要求事項の一つは、PEMSモデルに使用している各センサの故障の有無を監視すること、およびセンサの故障を処理する方策をもち運転の中断時間を最小にすることである。
【0005】
センサの性能確認の用語は、本特許出願中では多変量モデルベースのセンサの性能確認を指す。これは、プラントの測定に冗長度を使用する方法である。通常センサの測定値は、収集されたまたは過去のデータを用いる訓練手順法により確立できる相関構造を示す。この相関構造はオンラインで監視でき、相関構造が破壊されたときは、センサ故障が既に発生している可能性がある。しかし、この相関構造の破壊は、プロセスの反転、プロセスの過渡現象、またはセンサの故障に関係のない他の理由によることもある。主たる目的は、これが真にセンサの故障であるかどうかを判断し、故障であれば異常センサを識別することである。センサの性能確認の各種の段階は、以下のように要約できる。
【0006】
・検出 この段階は、相関構造における変化を検出する。これは、センサの故障によるか、またはそうでないこともある
・識別 この段階は、これがセンサの故障であるかどうかを判断し、特定のセンサを識別する
・推定 この段階は、真の値の再構成ができ、故障値の置換ができる故障のサイズを推定する。
・分類 この段階は、センサの故障のタイプ―完全な故障、バイアス、ドリフト、または精度劣化―を分類する。
特定の方法によっては、これらの段階はオーバーラップすることもある。多変量モデルをベースとするセンサの性能確認の主題を対象とするいくつかの特許が交付されている。その主要なものは次の通りである:
・Qin その他、米国特許第5,680,409号、“Method and Apparatus for detecting and identifying faulty sensors in a process (プロセス中の故障センサ検出および識別の方法と装置)”(特許文献1)
・Keelerその他、米国特許第5,548,528号、“Virtual Continuous Emission Monitoring System (仮想連続排出監視システム)”(特許文献2)
・Hopkins その他、米国特許第5,442,562号、“Method of controlling a manufacturing process using multivariate analysis(多変量解析を利用した製造プロセス制御の方法)”(特許文献3)
【0007】
Qin その他は、プロセス制御におけるセンサの性能確認を扱っている。好ましい実施形態はPCA(主要コンポーネント分析)を基本にしており、最適の再構成手順により識別を実施する。各センサ値は、それが故障しているとの仮定に基づいて再構成され、次に識別および分類が再構成エラーから算出した追跡インデックスにより行なわれる。
【0008】
Keelerその他は、PEMSにおけるセンサの性能確認を扱っている。開示されたシステムは、推定センサテクノロジーおよびPEMSに対するニューラルネットワークの使用に焦点を置く。センサの性能確認テクノロジーは、識別のための準最適再構成手順を使用し、分類を扱わず、PCAの非線型バージョンである“エンコーダ”ニューラルネットワークを使用する。エンコーダネットワークは、Marker Kramer“Nonlinear principal component analysis using autoassociative neural networks (自動結合ニューラルネットワークを使用する非線型主要コンポーネント解析)”, AIChE Journal, 37(2), pp. 233-243(1991)にも記載されている(非特許文献1)。
【0009】
Hopkins その他は、プロセス監視(多変量統計プロセス制御)記述中でセンサの性能確認を扱っており、PCAまたはPLS(部分最小自乗法)を使用する。識別は寄与率分析により行なわれる。検出は、主要コンポーネント“得点”または得点統計を監視し、標準信頼間隔と比較することにより行なわれる。識別は、異常得点に対する各オリジナル測定の寄与率を調べることにより行なわれる。この方法は故障タイプを分類するものではない。
【特許文献1】米国特許第5680409号明細書
【特許文献2】米国特許第5548528号明細書
【特許文献3】米国特許第5442562号明細書
【非特許文献1】“AIChE Journal”,(USA),1991,第37巻,第2号,p.233−243
【発明の開示】
【発明が解決しようとする課題】
【0010】
本発明は、故障センサの検出、識別、推定、再構成および分類のための新しい装置と方法を提供する。
【課題を解決するための手段】
【0011】
このアプローチは、部分最小自乗(PLS)または主要コンポーネント分析のような統計法を用いて、第1原則またはデータから作ることのできる標準プロセスモデルを使用する。好ましい実施形態においては、プロセスモデルは、主要コンポーネント数を選択して故障センサ値の再構成を最適化しているPCAモデルを基本にしており、これについてはQin およびDunia の“Determining the number of principal components for best reconstruction (最適再構成のための主要コンポーネント数の決定)”, Proc. Of the 5-th IFAC Symposium on Dynamics and Control of Process System, 359-364, Corfu, Greece, June 8-10, 1998 に記載されている。
検出段階は、モデル等式エラーに基づく検出インデックスを使用する。指数関数的に重み付けした移動平均(EWMA)フィルタを、検出インデックスに適用して一時的な過渡現象による誤ったアラームを減少させる。フィルタ処理された検出インデックス(FDI)は、統計的に算出したしきい値と比較され、予想される故障を検出する。予想される故障状況の検出により、本発明の識別段階を起動する。
【0012】
本発明の主要なコンポーネントは識別段階である。検出アラームが1つまたは複数の故障センサに起因するかどうかを判定し、さらに異常センサ(複数もあり)を識別するために、故障の一つのサブセットに影響されないが、他に対しては最大感度をもつ一連の検出器を構成する。これらの検出器は、最大感度をもつ構造化残差方法(SRAMS)と称される新しい方法により構成された構造化残差(SR)を基本にする。構造化残差は、一般にGertler とSinger, “A new structural framework for parity equation based failure detection and isolation (故障検出と分離を基にしたパリティ等式に対する新しい構造フレームワーク)”, Automatica 26:381-388, 1990 に記載されている。指数関数的に重み付けされた移動平均(EWMA)フィルタをSRに適用し、一時的な過渡現象による誤ったアラームを減少させる。またSRも自乗および正規化して、各SRを公平に比較する。識別は、これらの正規化した自乗フィルタ処理構造化残差(NSFSR)を、統計的に推定した信頼限界と比較することにより行なわれる。NSFSRに加え、検出の時点から累積加算した正規化構造化残差(NSR)に基づくインデックスを監視し、比較して、故障センサの識別に使用する。この2つの指数が普遍化された公算比(GLR)インデックスであり、また正規化した累積分散(NCUMVAR)インデックスある。NCUMVARインデックスは、精度の劣化したセンサを識別するために主として用いることができる。
【0013】
この時、故障の大きさは、モデル、故障データ、および故障センサが正しく識別されたとの仮定に基づいて最適の形で推定される。これは、例えばMartens およびNaes“Multivariate Calibration”, John Wiley and Sons, New York, 1989 に記載された公開されている既存の技術を使用する。故障方向の知識(故障センサの識別から知る)および推定される故障の大きさを使用し、正しいセンサ値を再構成する。
【0014】
故障分類段階は、センサ故障のタイプに関する診断情報を提供する。特に4つのタイプの故障が考えられる、つまり、完全な故障、バイアス、ドリフトおよび精度の劣化である。完全な故障は、識別した故障センサ測定値に関する回帰分析を行うことにより求められ、回帰線がゼロの傾きをもつことを統計的に推定して表わされる。他の3つの故障タイプを分類するには、識別時点以降の推定される故障サイズに関する回帰分析を行う。バイアスは、推定される故障サイズ回帰線がゼロの傾きおよびゼロでないオフセットをもつとする統計推定により示され、わずかな残差エラーをもつ。ドリフトは、推定される故障サイズ回帰線がゼロでない傾きをもつことを統計的に推定して示され、わずかな残差エラーをもつ。精度劣化は、推定された故障サイズ回帰線がゼロの傾き、ゼロのオフセットおよび有意な残差エラーをもつことを統計的に推定して示される。また精度の劣化は、故障がNCUMVARインデックスによってのみ識別可能な場合にも、示される。
【発明を実施するための最良の形態】
【0015】
本発明の上記およびその他の目的、特徴および利点は、添付の図面に図示された本発明の好ましい実施形態のさらに詳しい記述で明らかとなるであろう。図中では一貫して同一部分に対しては同一符号を用いている。図面は必ずしも縮尺通りでなく、本発明の原理を示するために強調が加えられている。
【0016】
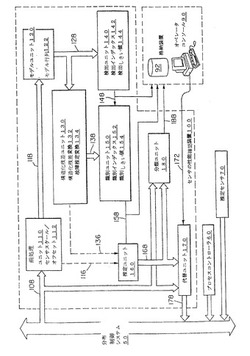
図1は、本発明のセンサの性能確認装置を示している。センサ確認装置の外部入力はセンサ測定値108から成り、その測定値には、例えば製造プラントにおける分散制御システム(DCS)50から得られる状態情報を含む。本発明の目的は、センサ測定値の冗長情報を用いて、センサがいつ故障したかを検出し、故障したセンサに選択的に代替値を提供することである。センサ測定値を使用するプロセスコントローラ60または推定センサ70のような他の装置は、この時必要に応じ代替値を使用できる。これにより、これらの装置は、故障したセンサの存在下で引き続き動作を続行できる。
【0017】
再び図1によれば、センサの性能確認装置100は、センサ確認の各種の段階を実行する8つの演算ユニットから構成される。マイクロプロセッサ、または他の所望のタイプのコンピュータを用いて実行できる演算ユニットは、次の通りである。
【0018】
・前処理ユニット110、これは拡大縮小とオフセット情報112を維持して、DCS50からのセンサ値108のベクトルを正規化した値118のベクトルに変換する。これらの正規化した値は、標準化ユニットをもち、好ましい実施形態においては、そのユニットに対し、その値を平均値0と標準偏差1をもつように設計する。これは、故障センサを識別するために、有効なモデル行列122、検出インデックス142および構造化残差変換132を形成するのに必要である。拡大縮小およびオフセット情報は、好ましい実施形態においてはセンサの過去のデータセットの統計分析から求められる。
【0019】
・モデルユニット120、これはモデル行列122を維持して、所定の時点で前処理されたセンサ値118のベクトルを等式エラー128と称されるエラーベクトルに変換する。等式エラーは、構造化残差ユニット130で使用して構造化残差値138および故障サイズ136を算定し、また検出ユニット140で使用して検出インデックス142を計算する。また構造化残差ユニットもモデル行列を使用し、構造化残差変換132およびその対応する故障推定変換134を設計する。好ましい実施形態においては、モデル行列は、主要コンポーネント分析を使用してセンサの過去のデータセットから形成される。
【0020】
・構造化残差ユニット130、これは構造化残差変換132の使用セットを維持し、現在の等式エラー128を1セットの構造化残差値138に変換する。識別ユニット150はこれらの構造化残差値を用いて、故障センサの同一性を判定する。構造化残差ユニットもまた推定ユニット160により使用される1セットの故障推定変換134を維持し、識別した故障に対する正規化した故障サイズ136を得る。
【0021】
・検出ユニット140、これは等式エラー128から検出インデックス142を計算し、検出インデックスを検出しきい値144と比較する。検出インデックスが検出しきい値を上回る場合は、検出イベント148を発生する。この検出イベントを使用して識別ユニット150を起動し、また、例えばオペレータアラーム発生、またはオペレータコンソール90もしくは格納装置92へのイベント記録に、センサ確認装置の外部で利用できる。
【0022】
・識別ユニット150、これは構造化残差値138を使用して、識別インデックスのいくつかのセット152を計算する。検出イベント148が発生した場合は、識別ユニットは、後述の特定のロジックに従って、識別インデックスをしきい値154の対応するセットと比較して故障特性を識別する。識別に成功すると、識別イベント158を発生し、それを使用して推定ユニットを起動する。この識別イベントは、どのセンサが故障しているかに関する情報を含み、例えばオペレータアラーム発生、またはオペレータコンソール90もしくは格納装置92へのイベント記録に、センサ確認装置の外部で利用できる。
【0023】
・推定ユニット160、これは識別イベント158により起動される。推定ユニットは、構造化残差ユニット130に、等式エラー128に適正な故障推定変換134(識別情報に基づいて選択される)を適用するよう要求し、その結果正規化した故障サイズ情報136を生成する。次に推定ユニットは、適切な拡大縮小116を136に適用して、オリジナルセンサ値の単位に対し拡大縮小された故障サイズ推定168を生成する。
【0024】
・代替ユニット170、これは、対応する故障センサ測定値108から推定された故障サイズ168を差し引き、1セットの代替値を得る。これらの代替値をセンサ確認装置の外部で利用できる。例えばそれらをDCS50に書込み、他の装置で利用する。代替ユニットは、推定ユニット160が起動しているときだけ機能する。代替ユニットは、オペレータ172の要求によっても機能を停止することができる。この場合には、代替ユニットの出力178はセンサ確認装置に対するオリジナル入力108と同一である。
【0025】
・分類ユニット180、これはセンサ故障のタイプに関する分析情報を計算する。特に4種の故障−完全な故障、バイアス、ドリフトおよび精度劣化−が考えられる。分類ユニットは、推定ユニット160が起動している時だけ機能し、また識別イベント158が発生したときだけ機能する。分類は、識別時点以降のセンサデータ108の分析および故障サイズ推定168に基づく。分類ユニットにより生成される分類情報188は、センサ確認装置の外部で利用できる。例えばオペレータアラーム発生、またはオペレータコンソール90もしくは格納装置92へのイベント記録に使用できる。
これらの演算ユニットのそれぞれの好ましい実施形態を以下に詳しく述べる。
【0026】
1.前処理ユニット
前処理ユニット110は、拡大縮小およびオフセット情報を計算および維持して、DCSからの測定されたセンサ値108と正規化された値118との間で変換を行い、それをモデルユニットおよび構造化残差ユニットに入力する。i番目のセンサに対する拡大縮小値Siおよびオフセット値Oiは、好ましい実施形態においては、i番目のセンサの平均値μiおよび標準偏差σiから下記のように計算される。
【0027】
【数1】

【0028】
次にi番目のセンサの測定された値uiは、次の式により標準化された値xiに変換される。
【0029】
【数2】
【0030】
μiおよびσiは、代表的なサンプルデータから、当業者にとって公知の標準法により推定される。
【0031】
2.モデルユニット
モデルユニット120は、下記の式で表わされる標準プロセスモデルを維持する。
【0032】
【数3】
【0033】
ここでx*∈Rnは、前処理されたセンサ値のベクトルであり、B∈Rmxnはモデル行列122であり、e*∈Rmは等式エラー128である。行列Bは、プロセスの質量バランスもしくはエネルギーバランスから算出するか、または主要コンポーネント解析(PCA)もしくは部分最小自乗(PLS)のような統計法を用いてプロセスデータから算出できる。
【0034】
2.1 PCAに基づくモデルユニット
好ましい実施形態においては、標準プロセスモデルはPCAを用いてプロセスデータから求められる。PCAは、一般に例えばJ. Edward Jackson “A User’s Guide to Principal Components(主要コンポーネントに対するユーザーズガイド)”、John Wiley 1991 に記載されている。PCAにおいては、センサ値x*(t)∈Rnは、次の形に分解される。
【0035】
【数4】
【0036】
ここでP∈Rnx(n−m)は、x*(t)の相関行列の主たる固有値λ1≧λ2≧Λλn−mに関連する固有ベクトルである。この場合には、モデル等式エラーe*(t)は、残差コンポーネント(λn−m+1, Λλn)に対応し、またGertler, Li, HuangとMcAvoy“Isolation enhanced principal component analysis (分離拡張主要コンポーネント解析)”Proc. IFAC Workshop on On-line Fault Detection and Supervision in the Chemical Process Industry, 4-5 June, 1998 に記載されているように次の式が成り立つ。
【0037】
【数5】
【0038】
好ましい実施形態においては、最適数の主要コンポーネントを選択して最適再構成機能を達成する、これについてはQin およびDunia の“Determining the number of principal components for best reconstruction (最適再構成のための主要コンポーネント数の決定)”、Proc. Of the 5-th IFAC Symposium on Dynamics and Control of Process System, 359-364, Corfu, Greece, June 8-10, 1998に詳述されている。
【0039】
3.構造化残差ユニット
構造化残差ユニット130は、特定方向の故障を感知するかまたは感知しない変換を維持する。これらの変換は、以下の故障表現の中で説明する。
【0040】
3.1 故障の表現
正常な条件下では、等式エラーe*(t)128は主とし測定雑音を含み、この雑音はゼロの平均ガウス雑音と仮定できる。センサ故障が発生すると、センサ測定はプロセス変数の正常値と故障値を含み、次式のようになる。
【0041】
【数6】
【0042】
ここでfi(t)∈Rliは故障の大きさのベクトルであり、Ξi∈Rnxliは故障方向の行列である。i番目のセンサの単一センサ故障を表わすと次式になる
【0043】
【数7】
【0044】
上記の式は、単位行列のi番目の列である。複数センサ故障を同時に表わすには、Ξiは単位行列の対応する列を単に含むだけでよい。センサ故障を含む式6の測定値関係を用いると、等式エラー128は下記のように表わすことができる。
【0045】
【数8】
【0046】
故障は、一般に等式エラーe(t)を増大させる。等式エラーの大きさは、後述のようなセンサ故障を検出するのに用いられる。個別のベクトルまたは行列Ξiが各センサ故障を表わすため、故障の識別は方向ベクトルを用いることにより達成できる。
【0047】
3.2 単一故障に対する構造化残差変換
構造化残差ユニット130は、構造化残差と呼ばれる1セットの変換を維持する。後述する識別ユニット150は、故障センサを識別するために構造化残差変換を用いる。
【0048】
構造化残差は、一般にGertler とSinger、“A new structural framework for parity equation based failure detection and isolation (故障検出と分離を基にしたパリティ等式に対する新しい構造フレームワーク)”、Automatica 26:381-388, 1990 に記載されている。本発明においては、構造化残差に対する新しい設計法を開示しており、“Structured Residual Approach with Maximized Sensitivity (最大感度をもつ構造化残差アプローチ)”またはSRAMSと呼ばれる。
j番目のセンサにおける単一センサ故障の場合に対しては、次の式が成り立つ。
【0049】
【数9】
【0050】
ここでbjは行列Bのj列である。したがってモデル等式エラーは次式となる。
【0051】
【数10】
【0052】
選択された残差構造を用いると、1セットの構造化残差r(t)は、等式エラーベクトルe(t)に変換行列Wをあらかじめ乗じることにより生成できる。
【0053】
【数11】
【0054】
r(t)の各エレメントを一つの特定のセンサ故障に対して関与するが、他の故障に対して関与しないように設計することが望ましい。j番目センサが故障しているr(t)のi番目のエレメントは、次式で表わされる。
【0055】
【数12】
【0056】
ここでwiTは行列W∈Rnxmのi行である。e(t)がランダム雑音であるため、残差rij(t)を故障方向ベクトルbjに対して感知するかまたはしないようにだけ設計できる。SRAMSデザイン基準は次のように記述される。
wiをrij(t)がi番目センサ故障を感知しないが、他のものは最大感度で感知するように選ぶ。数学的には次の形と同一である。
【0057】
【数13】
【0058】
ただし、
【0059】
【数14】
【0060】
幾何学的には、wiはbiに対して直角であるように選択し、の故障方向bjj≠iに対するその角度は最小に選択する。この問題は、次のようにも表現することができる。
【0061】
【数15】
【0062】
ただし、
【0063】
【数16】
【0064】
が条件である。ここで、
【0065】
【数17】
【0066】
制約wiTbio=0を満足するために、ベクトルwiは下記のように選択する必要がある。
【0067】
【数18】
【0068】
ここでSwiはbiの90°直交補空間である。したがってwiの解はziの解に変換される。ラグランジュ乗数λを用いて、ziの解は下記の値を最大とすることにより見出せる。
【0069】
【数19】
【0070】
(I−biobioT)bio=0であるから上の式は成り立つ。次のように表わす。
【0071】
【数20】
【0072】
および
【0073】
【数21】
【0074】
上式はBoのSwiへの投影であり、最大化の問題は次のように書き換えできる。
【0075】
【数22】
【0076】
Jをziに関して微分すると次の値が得られる。
【0077】
【数23】
【0078】
ただし、次の関係に注意が必要である
【0079】
【数24】
【0080】
式20は次のように変形できる
【0081】
【数25】
【0082】
または
【0083】
【数26】
【0084】
したがってzijは、最大の固有ベクトルに相当するBiobioTの固有ベクトルである。ziが判明すると、wiは式15から容易に計算できる。
【0085】
3.3 複数故障に対する構造化残差変換
SRAMS設計法は、複数センサが同時に故障するケースに応用することができる。複数センサ故障に対する等式エラーベクトルは、次の式で表わされる。
【0086】
【数27】
【0087】
ここでBΞi∈Rmxqは、故障したセンサに対応するBのq個の列を含み、またfi(t) ∈Rqは故障の大きさのベクトルである。BΞiの列は線型関係をもつことに留意が必要である。BΞiに単一値分解(当業者によく知られている行列分解)を実施し、ゼロでない単独値のみを維持することにより次の式が得られる
【0088】
【数28】
【0089】
ここで、
【0090】
【数29】
【0091】
複数センサ故障に対してWqを設計するために、WqはUqの直交補空間内に選択する。即ち、
【0092】
【数30】
【0093】
単一センサ故障ケースに類似の次式となる。さらに、次式が最大とされる。
【0094】
【数31】
【0095】
ただし、
【0096】
【数32】
【0097】
ここで、
【0098】
【数33】
【0099】
ラグランジュ乗数を用いた後、zqは次式の解であることが明らかになる。
【0100】
【数34】
【0101】
式29から次の関係式が得られる。
【0102】
【数35】
【0103】
または
【0104】
【数36】
【0105】
したがって、zqは、単に、最大固有値に関連するBqoBqoTの固有ベクトルである。
【0106】
3.4 従来の構造化残差方法との比較
従来の構造化残差方法(一般にGertler とSinger、“A new structural framework for parity equation based failure detection and isolation (故障検出と分離を基にしたパリティ等式に対する新しい構造フレームワーク)”, Automatica 26:381-388, 1990 、およびGertler とSinger、“Augmented models for statistical fault isolation in complex dynamic systems(複雑動的システムにおける統計的故障分離に対する拡張モデル)”, Proceeding of the American Control Conference, pp317-322, 1985) は、wiを対象とする特定の故障に対して感知しないものを選択するが、他の故障に対する感度を最大にすることはない。代表的な構造化残差設計では、wiの選択は、特有のものではなく、ある程度任意である。この設計おける任意性により、故障を分離する可能性を最大にしない準最適解を導く。本発明のSRAMS方法は、wiの特有の設計を実現して、他の故障に対する感度を最大にする反面、対象の故障を感知しない。
【0107】
3.5 構造化残差ユニットにより維持される変換
本発明の好ましい実施形態において、構造化残差ユニットは、先のセクション3.2に記載の単一センサ故障に対応する構造化残差変換の中核セットを維持する。これらの中核構造化残差変換は、構造化残差変換132の初期動作セットおよび関連の故障推定変換134を形成する。
【0108】
DSCからの1つまたは複数のセンサ測定値108が、センサ確認装置への入力において不良と表示されるときは、構造化残差変換および関連の故障推定変換の新しい動作セットが、構造化残差ユニットにより形成される。これらは次の通りである。b個のセンサが入力において不良と表示されると、n−b+1の新しい構造化残差変換が設計される。第1構造化残差変換が、不良のb個のセンサに対応する恒式行列の列を選択するΞを用いて設計される。この構造化残差変換は、これらの不良センサ値を感知しないが、他のセンサのいずれの故障も感知する。残りのn−bの構造化残差変換は、不良のb個のセンサに対応する恒式行列の列に加え、相互のセンサに対応するさらにもう1つの列を選択するΞにより設計される。これにより入力で不良と表示されるセンサの外にも、別の故障センサを識別することが可能になる。
【0109】
その他の構造化残差変換は、選択的に設計して、動作セットに加えることができる。例えばΞに基づく1セットの変換を、恒式行列からのすべてのペアの列から選択する。これにより、同時に故障しているペアを識別できる。しかし、複数故障を検出する好ましい方法は、いくつかのセンサ確認装置を用いることである。例えば図1において、プロセスコントローラ60が入力として5つのセンサ値を使用する場合は、最高5つのセンサ確認装置100を使用できる。各センサ確認装置は、入力の1つおよびプロセスコントローラに入力されない他の冗長センサ測定値を使用する。
【0110】
別の方法は、いくつかのセンサ確認装置をもつものであり、そのそれぞれは特定のセンサの故障の検出および識別に最適化され、再構成のために最適化される別のセンサ確認装置に信号供給する。
【0111】
4.検出ユニット
検出ユニット140は、現在の等式エラーに基づいて検出インデックス142を計算することにより、前処理されたセンサ値の相関構造を監視する。この検出インデックスが、統計的に推定された信頼限界に基づくしきい値144を越える場合には、検出イベント148が発生し、識別ユニットが起動される。好ましい実施形態では、正規化され、フィルタ処理された故障検出インデックス(NFFDI)は、以下のように使用される。
【0112】
4.1 故障検出インデックス
故障検出インデックス(FDI)は、下記のように定義される。
【0113】
【数37】
【0114】
故障が存在しないときは、FDI=‖e*(t)‖2=‖Bx*(t)‖2である。したがって、FDIに対する検出アラームしきい値は、実際には‖e*(t)‖2に対する信頼限界である。
【0115】
4.2 正規化故障検出インデックス
実際の工業プロセスにおいて、プロセス変数x*(t)は、一般には正規分布していない。しかし、等式エラーe*(t)128は、主として測定雑音を含み、したがってゼロの平均ガウス雑音と考えることができる。したがって、e*(t)TRe−1e*(t)は、mの自由度をもつχ2分布を満足する、ここで、Re=E{e(t)eT(t)}は等式エラー共分散行列である。このように正規化された故障検出インデックスを、
【0116】
【数38】
【0117】
と定義することにより、NFDIに対するdaの検出アラームしきい値は、当業者には既知の方法で、χ2分布を用い任意の有意水準αに対し求めることができる。
【0118】
NFDI≡‖η(t)‖2、ここでη(t)=Re−1/2e(t)およびRe−1/2は逆等式エラー共分散行列の行列平方根であることに留意すること。Re−1/2は等式エラーの相関性解除の効果をもつ。
【0119】
4.3 正規化され、フィルタ処理された故障検出インデックス
好ましい実施形態においては、指数関数的に重み付けされた移動平均(EWMA)フィルタを等式エラーに適用して、測定データ中の過渡現象および雑音の効果を減少させる。
【0120】
【数39】
【0121】
したがって次式が成り立つ。
【0122】
【数40】
【0123】
および
【0124】
【数41】
【0125】
ここで、
【0126】
【数42】
【0127】
正規化され、フィルタ処理された故障検出インデックス142は、次のように定義される。
【0128】
【数43】
【0129】
故障がなければ、η(t)は正規分布するため、-η(t)はまた正規分布し、E{-η(t)}=E{(t)η}=0である。しかし、EWMAフィルタは、-η(t)の分散を大幅に減少させるため、信頼限界daを直接 -daに適用することはできない。-η(t)の分散は次の式により表わされる。
【0130】
【数44】
【0131】
ここで、
【0132】
【数45】
【0133】
は自己相関関数である。η(t)が独立的かつ同一分布している場合は、ρ(k)は任意のk>0に対して0である。しかし、実際のデータに対しては、動的な過渡現象のためにこの条件を満足することは不可能である。式36の右辺のゼロでないρ(k)は、 -daに対する検出アラームしきい値の決定に寄与する。‖η(t)‖2に対するしきい値がdaであるから、式36から、‖-η(t)‖2に対する検出アラームしきい値144が下記の式であることは、容易に知ることができる:
【0134】
【数46】
【0135】
│ρ(k)│≦1、したがって次式が成り立つことに留意すること。
【0136】
【数47】
【0137】
したがって、NFFDIに対するしきい値は、通常NFDIに対するしきい値よりも小さい。実際に、p(k)は、一定の時間k後にはゼロに減少し、検出ユニットだけが固定数の項を維持して -daを計算する。有意性αは、検出ユニットの調節可能なパラメータである。
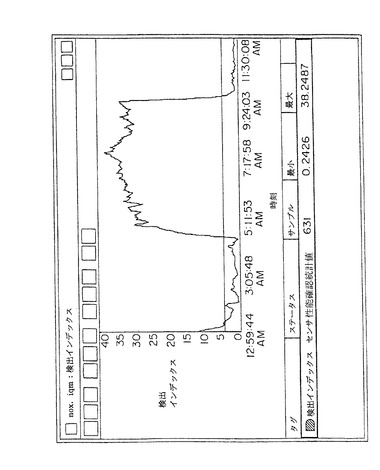
図4はNFFDINが故障発生を急速に増加している様子を示す。
【0138】
5.識別ユニット
識別ユニット150は、検出ユニットが検出イベントを発生する場合に、起動される。識別ユニットは、インデックス152のいくつかのセットを計算し、それを用いて、検出された故障を1つまたは複数のセンサの故障に識別できるかどうかを判定する。各セットのインデックスは、構造化残差ユニット130により維持される有効セットの構造化残差から算出される。一般に1つのセットにおける単一インデックスがしきい値よりも小さく、一方でそのセットの中のすべての他のインデックスがしきい値よりも大きい場合には、既知の方向の故障が識別される。この故障の方向は、インデックスに関連する構造化残差を定義する方向に一致する。最も一般的な場合は、この故障は単一センサの故障に相当する。
【0139】
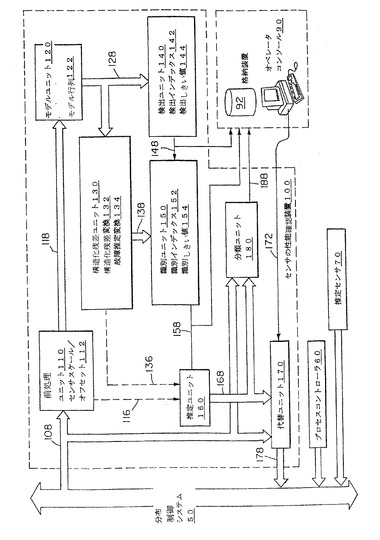
本発明の好ましい実施形態において、識別ユニットは、3セットのインデックス152およびそれらの関連しきい値154を維持する。これらのインデックスのセットは、正規化され、自乗され、フィルタ処理された構造化残差(NSFSR)、一般化公算比(GLR)インデックス、および正規化累積加算分散(NCUMVAR)インデックスである。関連しきい値は、gNSFSR、gGLRおよびgNCUMVARにより表わされる。図2に、故障識別プロセスを要約したフローダイアグラムを示す。
【0140】
5.1 正規化され、自乗され、フィルタ処理された構造化残差
理論的には、各構造化残差ri(t)は、センサが故障しないときはゼロであるか、またはゼロに近いと想定される。しかし、モデル化エラー、測定値ノイズおよび他の不確定性のために、ri(t)はゼロに等しくない。したがって、各ri(t) i,j=1,2,Λ,nに対するゼロでない信頼限界は、統計技法を用いて求められる。
【0141】
故障がないか、またはi番目の構造化残差が故障のセンサ(複数もある)では、i番目の構造化残差は正規分布に従う。
【0142】
【数48】
【0143】
ここでRe=E{e(t)eT(t)}は等式エラー共分散行列である。
したがって、
【0144】
【数49】
【0145】
次に、i番目の正規化構造化残差(NSR)を、
【0146】
【数50】
【0147】
として定義し、正規化され自乗された構造化残差(NSSR)をvi2(t)と定義することにより、NSSRに対する信頼限界はχa2(1)になる、ここで、αは有意水準である。
【0148】
EWMAフィルタをNSRに適用すると、正規化されフィルタ処理された構造化残差(NFSR)は、次式で表わされる。
【0149】
【数51】
【0150】
故障がないか、またはi番目の構造化残差が故障のセンサ(複数もある)では、NFSRも次式による正規分布に従う。
【0151】
【数52】
【0152】
および
【0153】
【数53】
【0154】
ここで
【0155】
【数54】
【0156】
は自己相関関数である。
【0157】
したがって、 -vi2(t)により定義された、正規化され自乗されフィルタ処理された構造化残差(NSFSR)、に対するアラームしきい値は、次の式により示されるアラームしきい値をもつ。
【0158】
【数55】
【0159】
すべてのセンサが正常であれば、 -vi2(t)は、次の式により示されるアラームしきい値を通常下回る。
【0160】
【数56】
【0161】
i番目の構造化残差に関連するセンサ(複数もあり)がSRAMS設計により故障の場合には、-vi2(t)は故障の影響を受けることはない。しかし他の残差-vi2(t) j≠iは大幅に増大する、なぜなら、それらの他のセンサの故障に対する感度は最大であるからである。
【0162】
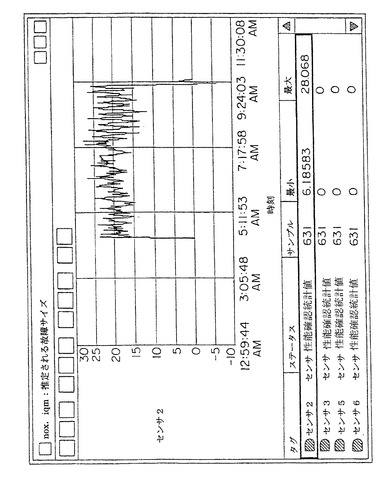
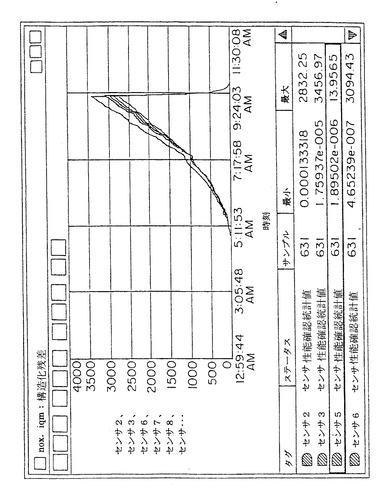
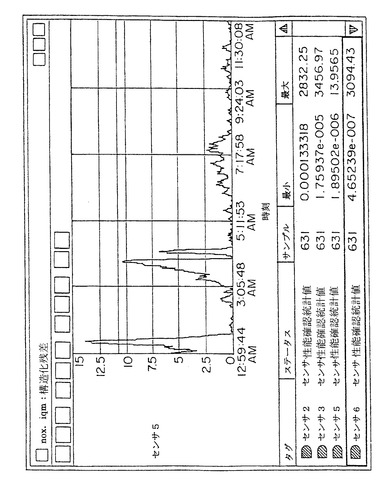
したがって、選択された有意水準αおよび時点tを用いると、NSFSRsの中で、そのしきい値giNSFSRより小さい正確な1つのNSFSRが存在することにより、故障センサを識別し、識別イベント158を発生することになる。この例は図7に示され、その中で上のウインドウは故障センサ5に対応しないNSFSRは極めて大きくなるのに対し、下のウインドウはセンサ5に対するNSFSRはそのしきい値を下回ったままであることを示す。
【0163】
多数のセンサの性能を確認することが多いため、たとえ各インデックスがそのしきい値を上回る確率が低くても、最低限1つの残差がそのしきい値を上回る確率をもつことは有意である。例えば20の残差があると仮定すると、ri(t) i=1,2,Λ,20である。少なくとも一つのNSFSRがそのしきい値を上回る確率は(α=0.05と仮定して)、すべてのセンサが正常であっても
P=1−(1−α)20=1−0.9520=0.642
である。したがって、NSFSRは、故障検出に対して使用されない。代わりに、検出ユニットは、NFFDIを用いて検出イベントをトリガーし、その後に識別ユニットが、各種セットのインデックスを使用して、NSFSRから始めて、故障センサを識別する。
【0164】
検出ユニットが検出イベントを発生しても、いなくても、選択的にNSFSRインデックスを各サイクルにおいて計算できる。しかし、次の2つのセクションに記載したインデックスセットは、故障検出の時点以降、構造化残差情報を累積加算する。したがって、それらは検出イベントの発生以降においてのみ有効である。
【0165】
5.2 一般化された公算比インデックス
センサ故障が平均して有意な変化、例えば完全故障、バイアス、ドリフトを生じる場合は、一般化された公算比(GLR)は、通常これを検出するのに適正な検定法である(Benveniste, BassevilleおよびMoustakides “The asymptotic local approach to change detection and model validation (検出とモデル確認変化に対する漸近軌跡方法)”、IEEE Trans. Auto. Cont. 32(7):538-592, July 1987)。
【0166】
以下の分析を明瞭に示すために、各構造化残差変換は、単一センサにおける故障に相当すると仮定する。しかし、一般には、GLRインデックスは、構造化残差設計には関係なく構成し、監視することができる。
【0167】
式42に示すように、センサが故障でなければ、vi(t)はゼロの平均であり、単位分散をもつ正規分布を示す。しかしj番目のセンサがtfの時点で故障を発生すると、次式
【0168】
【数57】
【0169】
となり、ゼロの平均ではなく、分散は変化しないことが明らかである。言い換えれば次式が成り立つ。
【0170】
【数58】
【0171】
ここで
【0172】
【数59】
【0173】
SRAMS設計より、μjj=0である。
【0174】
vi(t)の平均変化を検出するために、下記のGLR関数を定義する。
【0175】
【数60】
【0176】
μijに関してStft(μij)を微分することにより、μijの最適の推定値が求められる。
【0177】
【数61】
【0178】
<μijを用いると、Stft(μij)は最大となり次式が成り立つ。
【0179】
【数62】
【0180】
j番目のセンサが故障であれば、μjj=0、およびvj(t)〜X(0,1)である。式50から次式が成り立つ。
【0181】
【数63】
【0182】
または
【0183】
【数64】
【0184】
したがって、選択された有意水準αおよび時点tを用いると、次のnGLRsの中で、
【0185】
【数65】
【0186】
しきい値gGLR=χa2(1)よりも小さい確実に1つのGLRが存在することにより、故障したセンサを特定し、識別イベント158を発生する。
【0187】
5.3 正規化された累積加算分散インデックス
センサが精度劣化故障を生じた場合、GLRインデックスセットはそれを識別するのが困難である。精度劣化故障の位置を識別するため、NSRの平均および分散が、故障の生じた時点以降計算される。
【0188】
【数66】
【0189】
説明を判りやすくするために、各構造化残差変換が単一センサの故障に相当すると仮定すれば、故障のセンサがないか、またはi番目のセンサが故障のときは、次式が成り立つ。
【0190】
【数67】
【0191】
したがって、選択された有意水準αおよび時点tを用いると、n個のNCUMVARs間で、しきい値gNCUMVAR={1/(t−tf) }χa2(t−tf−1)よりも小さい確実に1つのNCUMVARが存在すると、精度故障をもつセンサを識別定し、識別イベント158を発生する。
【0192】
6.推定ユニット
推定ユニット160は、識別ユニット150が識別イベント158を発生した場合だけ、起動される。この時、推定ユニットは、識別イベントを発生するのに機能した構造化残差変換に対応するモデルに基づく故障の大きさ、故障データおよび行列Ξiを最適の形で推定する。この最適推定は、例えばMartens とNaes“Multivariate Calibration(多変量キャリブレーション)”、John Wiley and Sons, New York, 1989 に記載された公開されている既知の方法に基づくものである。
【0193】
最適推定は、方向Uqでの時間関数fq(t)を選択することにより得られる。ここでは、式24と同様に、Uqが非単一値だけをその中に維持するBΞiにおける単一値分解の直交左側行列である。言い換えれば、次式を最小にすることである。
【0194】
【数68】
【0195】
この問題の少なくとも1つの自乗解は次式になる。
【0196】
【数69】
【0197】
最初の故障の大きさfi(t)は、式25を用いて推定できる。
【0198】
【数70】
【0199】
ここで( )+は、当業者には既知のMoore-Penrose 疑似逆関数である。構造化残差ユニット130は、それが維持する各構造化残差に対して推定行列134
【0200】
【数71】
【0201】
を維持する。故障を識別した構造化残残差に対応する推定行列を使用して、等式エラー128を、前処理されたセンサ値スペース136内の故障ベクトルの推定に写像する。次に、推定ユニットは、前処理ユニットからの逆拡大縮小化116を適用して、最初のセンサスペース168内に故障ベクトルの推定を得る。
【0202】
【数72】
【0203】
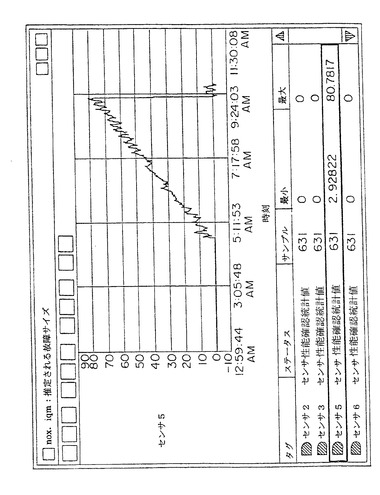
図5は、センサ2のバイアス故障に対する推定ユニットの出力を示す。図6は、センサ5のドリフト故障に対する推定ユニットの出力を示す。両者の場合、故障サイズは正確に推定される。
【0204】
7.代替ユニット
代替ユニット170は、推定ユニットにより推定された(式56)最初のセンサスペース168における故障ベクトルの推定を単純に行い、センサ値108の測定されたベクトルから、推定された故障を差し引いて代替値178のベクトルを生成する。
【0205】
【数73】
【0206】
代替ユニットは、推定ユニット160が機能するときだけ機能し、また識別ユニット150が識別イベント158を発生した場合だけ機能する。さらに安全機能として、装置のオペレータは、代替ユニットの機能を確実に無効にできる。
【0207】
8.分類ユニット
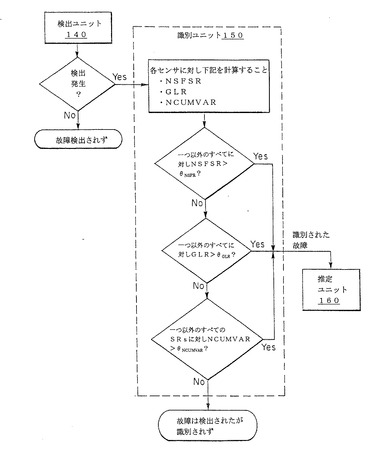
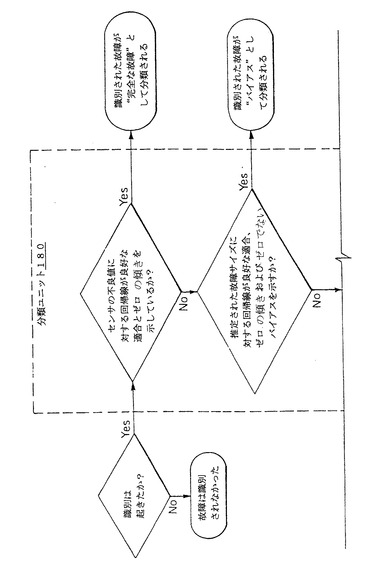
分類ユニット180は、センサの故障のタイプに関する診断情報を計算する。特に4タイプの故障、すなわち完全故障、バイアス、ドリフトおよび精度劣化が考慮される。
【0208】
分類ユニットは、分類イベント158が発生しているときだけ機能する。センサが最初に故障であると識別された時点から、測定されたセンサ値のバッファを維持し、当該センサに対する推定故障サイズのバッファもまた維持する。これらの2つのバッファにおける情報を分析し、それを用いて該当センサに対する故障のタイプを分類する。分析は主として統計的推定を使用し、したがって分類ユニットの調節可能なパラメータである有意水準αを必要とする。
【0209】
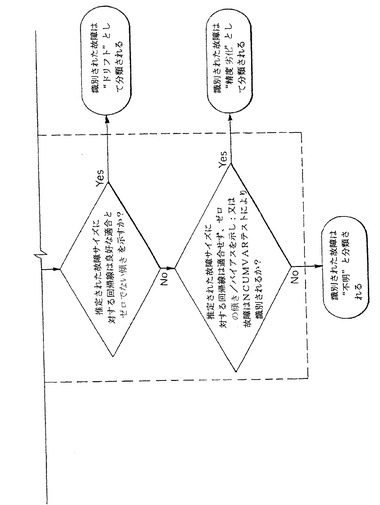
説明を判りやすくするために、単一センサ故障が、識別ユニット150により識別されていることを前提とする。分類ロジックのフローダイアグラムは、図3に示されている。
【0210】
8.1 分類タイプ:完全故障
完全故障は、故障センサの測定値108に関する回帰分析を実施することにより求められ、回帰線が良く一致し、ゼロの傾きをもつ統計推定により表示される。
【0211】
{k,ui(k)│k=tid,Λ,t}を回帰線が計算される点のシーケンスとする。ここで、tidはセンサが故障と識別された点であり、またtは現在の時点である。
【0212】
標準最小自乗回帰を用いて、点と最良の一致線との間の残差値を最小にすることにより、傾きβおよびy−切片αが次のように推定される。
【0213】
【数74】
【0214】
ここで
【0215】
【数75】
【0216】
傾きが統計的にゼロに等しいかどうかを調べるために、下記の統計値を作成する。
【0217】
【数76】
【0218】
ここで <βの標準偏差は次式で求められる。
【0219】
【数77】
【0220】
そして残差の標準偏差σは次式により推定される。
【0221】
【数78】
【0222】
ここで、
【0223】
【数79】
【0224】
は残差エラーである。
式60により得られる統計値は、t−tid−1の自由度をもつスチューデントt分布を満足する(例えばBirkesおよびDodge “Alternative Method of Regression(回帰の代替方法)”、John Wiley & Sons 1993を参照のこと)。
回帰線の一致度は、特定のしきい値を上回る線型相関係数により求められる。
【0225】
8.2 分類タイプ:バイアス
バイアスは、推定ユニット160により計算された故障センサの故障サイズ推定168に関する回帰分析を実施することにより求められ、回帰線が良く一致し、ゼロの傾きをもち、ゼロでないバイアスをもつことを統計的に推定して示される。
{k,fi(k)│k=tid,Λ,t}を、回帰線を計算する一連の点とする。ここで、tidは、センサが故障と識別される点であり、tは現時点である。ゼロの傾きに対する検定は、故障サイズシーケンスfi(k)がセンサ値シーケンスui(k)に替わる以外は、完全欠陥の分類と同じである。回帰線の一致度は、特定のしきい値を越える線型相関係数により求められる。
ゼロでないバイアスを検定するために次の統計値を用いる。
【0226】
【数80】
【0227】
これは、t−tid−1の自由度をもつスチューデントt分布をも満足する。
【0228】
8.3 分類タイプ:ドリフト
ドリフトは、推定ユニット160により計算された故障センサの故障サイズ推定168に関する回帰分析を行うことにより求められ、回帰線が良く適合し、ゼロでない傾きをもつことを統計的に推定して示される。
【0229】
8.4 分類タイプ:精度劣化
精度劣化は、推定ユニット160により計算された故障センサの故障サイズ推定168に関する回帰分析を実施することにより求められ、回帰線が良く適合せず、ゼロの傾きをもち、またゼロのバイアスをもつことを統計的に推定して示される。
【0230】
精度劣化は、識別イベント158がセクション5.3のNCUMVAR検定により発生した場合にも表示される。
【0231】
9.均等物
上記の詳細は、本発明の好ましい実施形態に関するものである。本発明は、これらの詳細には限定されるものではないと理解されるべきである。当業者によって行われる代替および変更は、本発明の精神から逸脱することなく細部の実施形態に対して実施できる。これらの改変は、本発明の範囲内にあるものとする。
【図面の簡単な説明】
【0232】
【図1】本発明の好ましい実施形態の8つの演算ユニットおよびこれらのユニット間の関係を示す。
【図2】図1の実施形態における識別プロセスのフローダイアグラムを示す。
【図3A】図1の実施形態における分類プロセスのフローダイアグラムを示す。
【図3B】図1の実施形態における分類プロセスのフローダイアグラムを示す。
【図4】ボイラプロセスでの故障の発生時に、急速に増大し、しきい値を上回る本発明の検出インデックスを示す。
【図5】ボイラプロセスのセンサ2におけるバイアス故障の発生時の推定ユニットの出力を示す。
【図6】ボイラプロセスのセンサ5におけるドリフト故障の発生時の推定ユニットの出力を示す。
【図7A】ボイラプロセスのセンサ5におけるドリフト故障の発生時に応答する本発明のNSFSRインデックスを示す。
【図7B】ボイラプロセスのセンサ5におけるドリフト故障の発生時に応答する本発明のNSFSRインデックスを示す。
【技術分野】
【0001】
本発明は、一般にプロセス変数を測定するためにセンサを使用するプロセスコントローラおよびプロセス監視システムに関するものである。特に本発明は、1つまたは複数のセンサの故障を検出・識別し、センサの故障のタイプを分類し、エラーのあるセンサ値を正しいプロセス変数値の推定値に代替するシステムに関するものである。
【背景技術】
【0002】
センサの性能確認は、プロセス工業における多くのモデルをベースとする用途に対する重要なステップである。典型的なモデルをベースとする用途には、モデル予測制御用途(MPC)および、実験室サンプルまたはハードウェアアナライザから得られるコストがかかるか頻度の少ない測定を、モデルから定期的に得られる推定値に代替する推定検知利用が含まれる。
【0003】
一般的なMPC用途では、定常状態最適化を実行して、制御また操作される変数に対する最適目標値を見出す。センサが故障している場合は、最適化した目標値は無効になる。したがって有効なセンサは、たとえ故障しても最良の再構成により制御システムをオンラインに維持する。
【0004】
代表的な推定センサ用途は、予測排出監視システム(PEMS)の分野である。連邦および/または州の法規は、大気汚染プラントに対し窒素酸化物(NOx)、酸素(O2)および一酸化炭素(CO)などの排出を監視することを要求することができる。ハードウエア連続排出監視システム(CEMS)は、イニシャルコストとメンテナンスコストの両者において高い負担が必要である。PEMSに充分に精度と信頼性があることが明らかならば、CEMSをPEMSに置き換えることができる。PEMSに対する品質保証要求事項の一つは、PEMSモデルに使用している各センサの故障の有無を監視すること、およびセンサの故障を処理する方策をもち運転の中断時間を最小にすることである。
【0005】
センサの性能確認の用語は、本特許出願中では多変量モデルベースのセンサの性能確認を指す。これは、プラントの測定に冗長度を使用する方法である。通常センサの測定値は、収集されたまたは過去のデータを用いる訓練手順法により確立できる相関構造を示す。この相関構造はオンラインで監視でき、相関構造が破壊されたときは、センサ故障が既に発生している可能性がある。しかし、この相関構造の破壊は、プロセスの反転、プロセスの過渡現象、またはセンサの故障に関係のない他の理由によることもある。主たる目的は、これが真にセンサの故障であるかどうかを判断し、故障であれば異常センサを識別することである。センサの性能確認の各種の段階は、以下のように要約できる。
【0006】
・検出 この段階は、相関構造における変化を検出する。これは、センサの故障によるか、またはそうでないこともある
・識別 この段階は、これがセンサの故障であるかどうかを判断し、特定のセンサを識別する
・推定 この段階は、真の値の再構成ができ、故障値の置換ができる故障のサイズを推定する。
・分類 この段階は、センサの故障のタイプ―完全な故障、バイアス、ドリフト、または精度劣化―を分類する。
特定の方法によっては、これらの段階はオーバーラップすることもある。多変量モデルをベースとするセンサの性能確認の主題を対象とするいくつかの特許が交付されている。その主要なものは次の通りである:
・Qin その他、米国特許第5,680,409号、“Method and Apparatus for detecting and identifying faulty sensors in a process (プロセス中の故障センサ検出および識別の方法と装置)”(特許文献1)
・Keelerその他、米国特許第5,548,528号、“Virtual Continuous Emission Monitoring System (仮想連続排出監視システム)”(特許文献2)
・Hopkins その他、米国特許第5,442,562号、“Method of controlling a manufacturing process using multivariate analysis(多変量解析を利用した製造プロセス制御の方法)”(特許文献3)
【0007】
Qin その他は、プロセス制御におけるセンサの性能確認を扱っている。好ましい実施形態はPCA(主要コンポーネント分析)を基本にしており、最適の再構成手順により識別を実施する。各センサ値は、それが故障しているとの仮定に基づいて再構成され、次に識別および分類が再構成エラーから算出した追跡インデックスにより行なわれる。
【0008】
Keelerその他は、PEMSにおけるセンサの性能確認を扱っている。開示されたシステムは、推定センサテクノロジーおよびPEMSに対するニューラルネットワークの使用に焦点を置く。センサの性能確認テクノロジーは、識別のための準最適再構成手順を使用し、分類を扱わず、PCAの非線型バージョンである“エンコーダ”ニューラルネットワークを使用する。エンコーダネットワークは、Marker Kramer“Nonlinear principal component analysis using autoassociative neural networks (自動結合ニューラルネットワークを使用する非線型主要コンポーネント解析)”, AIChE Journal, 37(2), pp. 233-243(1991)にも記載されている(非特許文献1)。
【0009】
Hopkins その他は、プロセス監視(多変量統計プロセス制御)記述中でセンサの性能確認を扱っており、PCAまたはPLS(部分最小自乗法)を使用する。識別は寄与率分析により行なわれる。検出は、主要コンポーネント“得点”または得点統計を監視し、標準信頼間隔と比較することにより行なわれる。識別は、異常得点に対する各オリジナル測定の寄与率を調べることにより行なわれる。この方法は故障タイプを分類するものではない。
【特許文献1】米国特許第5680409号明細書
【特許文献2】米国特許第5548528号明細書
【特許文献3】米国特許第5442562号明細書
【非特許文献1】“AIChE Journal”,(USA),1991,第37巻,第2号,p.233−243
【発明の開示】
【発明が解決しようとする課題】
【0010】
本発明は、故障センサの検出、識別、推定、再構成および分類のための新しい装置と方法を提供する。
【課題を解決するための手段】
【0011】
このアプローチは、部分最小自乗(PLS)または主要コンポーネント分析のような統計法を用いて、第1原則またはデータから作ることのできる標準プロセスモデルを使用する。好ましい実施形態においては、プロセスモデルは、主要コンポーネント数を選択して故障センサ値の再構成を最適化しているPCAモデルを基本にしており、これについてはQin およびDunia の“Determining the number of principal components for best reconstruction (最適再構成のための主要コンポーネント数の決定)”, Proc. Of the 5-th IFAC Symposium on Dynamics and Control of Process System, 359-364, Corfu, Greece, June 8-10, 1998 に記載されている。
検出段階は、モデル等式エラーに基づく検出インデックスを使用する。指数関数的に重み付けした移動平均(EWMA)フィルタを、検出インデックスに適用して一時的な過渡現象による誤ったアラームを減少させる。フィルタ処理された検出インデックス(FDI)は、統計的に算出したしきい値と比較され、予想される故障を検出する。予想される故障状況の検出により、本発明の識別段階を起動する。
【0012】
本発明の主要なコンポーネントは識別段階である。検出アラームが1つまたは複数の故障センサに起因するかどうかを判定し、さらに異常センサ(複数もあり)を識別するために、故障の一つのサブセットに影響されないが、他に対しては最大感度をもつ一連の検出器を構成する。これらの検出器は、最大感度をもつ構造化残差方法(SRAMS)と称される新しい方法により構成された構造化残差(SR)を基本にする。構造化残差は、一般にGertler とSinger, “A new structural framework for parity equation based failure detection and isolation (故障検出と分離を基にしたパリティ等式に対する新しい構造フレームワーク)”, Automatica 26:381-388, 1990 に記載されている。指数関数的に重み付けされた移動平均(EWMA)フィルタをSRに適用し、一時的な過渡現象による誤ったアラームを減少させる。またSRも自乗および正規化して、各SRを公平に比較する。識別は、これらの正規化した自乗フィルタ処理構造化残差(NSFSR)を、統計的に推定した信頼限界と比較することにより行なわれる。NSFSRに加え、検出の時点から累積加算した正規化構造化残差(NSR)に基づくインデックスを監視し、比較して、故障センサの識別に使用する。この2つの指数が普遍化された公算比(GLR)インデックスであり、また正規化した累積分散(NCUMVAR)インデックスある。NCUMVARインデックスは、精度の劣化したセンサを識別するために主として用いることができる。
【0013】
この時、故障の大きさは、モデル、故障データ、および故障センサが正しく識別されたとの仮定に基づいて最適の形で推定される。これは、例えばMartens およびNaes“Multivariate Calibration”, John Wiley and Sons, New York, 1989 に記載された公開されている既存の技術を使用する。故障方向の知識(故障センサの識別から知る)および推定される故障の大きさを使用し、正しいセンサ値を再構成する。
【0014】
故障分類段階は、センサ故障のタイプに関する診断情報を提供する。特に4つのタイプの故障が考えられる、つまり、完全な故障、バイアス、ドリフトおよび精度の劣化である。完全な故障は、識別した故障センサ測定値に関する回帰分析を行うことにより求められ、回帰線がゼロの傾きをもつことを統計的に推定して表わされる。他の3つの故障タイプを分類するには、識別時点以降の推定される故障サイズに関する回帰分析を行う。バイアスは、推定される故障サイズ回帰線がゼロの傾きおよびゼロでないオフセットをもつとする統計推定により示され、わずかな残差エラーをもつ。ドリフトは、推定される故障サイズ回帰線がゼロでない傾きをもつことを統計的に推定して示され、わずかな残差エラーをもつ。精度劣化は、推定された故障サイズ回帰線がゼロの傾き、ゼロのオフセットおよび有意な残差エラーをもつことを統計的に推定して示される。また精度の劣化は、故障がNCUMVARインデックスによってのみ識別可能な場合にも、示される。
【発明を実施するための最良の形態】
【0015】
本発明の上記およびその他の目的、特徴および利点は、添付の図面に図示された本発明の好ましい実施形態のさらに詳しい記述で明らかとなるであろう。図中では一貫して同一部分に対しては同一符号を用いている。図面は必ずしも縮尺通りでなく、本発明の原理を示するために強調が加えられている。
【0016】
図1は、本発明のセンサの性能確認装置を示している。センサ確認装置の外部入力はセンサ測定値108から成り、その測定値には、例えば製造プラントにおける分散制御システム(DCS)50から得られる状態情報を含む。本発明の目的は、センサ測定値の冗長情報を用いて、センサがいつ故障したかを検出し、故障したセンサに選択的に代替値を提供することである。センサ測定値を使用するプロセスコントローラ60または推定センサ70のような他の装置は、この時必要に応じ代替値を使用できる。これにより、これらの装置は、故障したセンサの存在下で引き続き動作を続行できる。
【0017】
再び図1によれば、センサの性能確認装置100は、センサ確認の各種の段階を実行する8つの演算ユニットから構成される。マイクロプロセッサ、または他の所望のタイプのコンピュータを用いて実行できる演算ユニットは、次の通りである。
【0018】
・前処理ユニット110、これは拡大縮小とオフセット情報112を維持して、DCS50からのセンサ値108のベクトルを正規化した値118のベクトルに変換する。これらの正規化した値は、標準化ユニットをもち、好ましい実施形態においては、そのユニットに対し、その値を平均値0と標準偏差1をもつように設計する。これは、故障センサを識別するために、有効なモデル行列122、検出インデックス142および構造化残差変換132を形成するのに必要である。拡大縮小およびオフセット情報は、好ましい実施形態においてはセンサの過去のデータセットの統計分析から求められる。
【0019】
・モデルユニット120、これはモデル行列122を維持して、所定の時点で前処理されたセンサ値118のベクトルを等式エラー128と称されるエラーベクトルに変換する。等式エラーは、構造化残差ユニット130で使用して構造化残差値138および故障サイズ136を算定し、また検出ユニット140で使用して検出インデックス142を計算する。また構造化残差ユニットもモデル行列を使用し、構造化残差変換132およびその対応する故障推定変換134を設計する。好ましい実施形態においては、モデル行列は、主要コンポーネント分析を使用してセンサの過去のデータセットから形成される。
【0020】
・構造化残差ユニット130、これは構造化残差変換132の使用セットを維持し、現在の等式エラー128を1セットの構造化残差値138に変換する。識別ユニット150はこれらの構造化残差値を用いて、故障センサの同一性を判定する。構造化残差ユニットもまた推定ユニット160により使用される1セットの故障推定変換134を維持し、識別した故障に対する正規化した故障サイズ136を得る。
【0021】
・検出ユニット140、これは等式エラー128から検出インデックス142を計算し、検出インデックスを検出しきい値144と比較する。検出インデックスが検出しきい値を上回る場合は、検出イベント148を発生する。この検出イベントを使用して識別ユニット150を起動し、また、例えばオペレータアラーム発生、またはオペレータコンソール90もしくは格納装置92へのイベント記録に、センサ確認装置の外部で利用できる。
【0022】
・識別ユニット150、これは構造化残差値138を使用して、識別インデックスのいくつかのセット152を計算する。検出イベント148が発生した場合は、識別ユニットは、後述の特定のロジックに従って、識別インデックスをしきい値154の対応するセットと比較して故障特性を識別する。識別に成功すると、識別イベント158を発生し、それを使用して推定ユニットを起動する。この識別イベントは、どのセンサが故障しているかに関する情報を含み、例えばオペレータアラーム発生、またはオペレータコンソール90もしくは格納装置92へのイベント記録に、センサ確認装置の外部で利用できる。
【0023】
・推定ユニット160、これは識別イベント158により起動される。推定ユニットは、構造化残差ユニット130に、等式エラー128に適正な故障推定変換134(識別情報に基づいて選択される)を適用するよう要求し、その結果正規化した故障サイズ情報136を生成する。次に推定ユニットは、適切な拡大縮小116を136に適用して、オリジナルセンサ値の単位に対し拡大縮小された故障サイズ推定168を生成する。
【0024】
・代替ユニット170、これは、対応する故障センサ測定値108から推定された故障サイズ168を差し引き、1セットの代替値を得る。これらの代替値をセンサ確認装置の外部で利用できる。例えばそれらをDCS50に書込み、他の装置で利用する。代替ユニットは、推定ユニット160が起動しているときだけ機能する。代替ユニットは、オペレータ172の要求によっても機能を停止することができる。この場合には、代替ユニットの出力178はセンサ確認装置に対するオリジナル入力108と同一である。
【0025】
・分類ユニット180、これはセンサ故障のタイプに関する分析情報を計算する。特に4種の故障−完全な故障、バイアス、ドリフトおよび精度劣化−が考えられる。分類ユニットは、推定ユニット160が起動している時だけ機能し、また識別イベント158が発生したときだけ機能する。分類は、識別時点以降のセンサデータ108の分析および故障サイズ推定168に基づく。分類ユニットにより生成される分類情報188は、センサ確認装置の外部で利用できる。例えばオペレータアラーム発生、またはオペレータコンソール90もしくは格納装置92へのイベント記録に使用できる。
これらの演算ユニットのそれぞれの好ましい実施形態を以下に詳しく述べる。
【0026】
1.前処理ユニット
前処理ユニット110は、拡大縮小およびオフセット情報を計算および維持して、DCSからの測定されたセンサ値108と正規化された値118との間で変換を行い、それをモデルユニットおよび構造化残差ユニットに入力する。i番目のセンサに対する拡大縮小値Siおよびオフセット値Oiは、好ましい実施形態においては、i番目のセンサの平均値μiおよび標準偏差σiから下記のように計算される。
【0027】
【数1】
【0028】
次にi番目のセンサの測定された値uiは、次の式により標準化された値xiに変換される。
【0029】
【数2】
【0030】
μiおよびσiは、代表的なサンプルデータから、当業者にとって公知の標準法により推定される。
【0031】
2.モデルユニット
モデルユニット120は、下記の式で表わされる標準プロセスモデルを維持する。
【0032】
【数3】
【0033】
ここでx*∈Rnは、前処理されたセンサ値のベクトルであり、B∈Rmxnはモデル行列122であり、e*∈Rmは等式エラー128である。行列Bは、プロセスの質量バランスもしくはエネルギーバランスから算出するか、または主要コンポーネント解析(PCA)もしくは部分最小自乗(PLS)のような統計法を用いてプロセスデータから算出できる。
【0034】
2.1 PCAに基づくモデルユニット
好ましい実施形態においては、標準プロセスモデルはPCAを用いてプロセスデータから求められる。PCAは、一般に例えばJ. Edward Jackson “A User’s Guide to Principal Components(主要コンポーネントに対するユーザーズガイド)”、John Wiley 1991 に記載されている。PCAにおいては、センサ値x*(t)∈Rnは、次の形に分解される。
【0035】
【数4】
【0036】
ここでP∈Rnx(n−m)は、x*(t)の相関行列の主たる固有値λ1≧λ2≧Λλn−mに関連する固有ベクトルである。この場合には、モデル等式エラーe*(t)は、残差コンポーネント(λn−m+1, Λλn)に対応し、またGertler, Li, HuangとMcAvoy“Isolation enhanced principal component analysis (分離拡張主要コンポーネント解析)”Proc. IFAC Workshop on On-line Fault Detection and Supervision in the Chemical Process Industry, 4-5 June, 1998 に記載されているように次の式が成り立つ。
【0037】
【数5】
【0038】
好ましい実施形態においては、最適数の主要コンポーネントを選択して最適再構成機能を達成する、これについてはQin およびDunia の“Determining the number of principal components for best reconstruction (最適再構成のための主要コンポーネント数の決定)”、Proc. Of the 5-th IFAC Symposium on Dynamics and Control of Process System, 359-364, Corfu, Greece, June 8-10, 1998に詳述されている。
【0039】
3.構造化残差ユニット
構造化残差ユニット130は、特定方向の故障を感知するかまたは感知しない変換を維持する。これらの変換は、以下の故障表現の中で説明する。
【0040】
3.1 故障の表現
正常な条件下では、等式エラーe*(t)128は主とし測定雑音を含み、この雑音はゼロの平均ガウス雑音と仮定できる。センサ故障が発生すると、センサ測定はプロセス変数の正常値と故障値を含み、次式のようになる。
【0041】
【数6】
【0042】
ここでfi(t)∈Rliは故障の大きさのベクトルであり、Ξi∈Rnxliは故障方向の行列である。i番目のセンサの単一センサ故障を表わすと次式になる
【0043】
【数7】
【0044】
上記の式は、単位行列のi番目の列である。複数センサ故障を同時に表わすには、Ξiは単位行列の対応する列を単に含むだけでよい。センサ故障を含む式6の測定値関係を用いると、等式エラー128は下記のように表わすことができる。
【0045】
【数8】
【0046】
故障は、一般に等式エラーe(t)を増大させる。等式エラーの大きさは、後述のようなセンサ故障を検出するのに用いられる。個別のベクトルまたは行列Ξiが各センサ故障を表わすため、故障の識別は方向ベクトルを用いることにより達成できる。
【0047】
3.2 単一故障に対する構造化残差変換
構造化残差ユニット130は、構造化残差と呼ばれる1セットの変換を維持する。後述する識別ユニット150は、故障センサを識別するために構造化残差変換を用いる。
【0048】
構造化残差は、一般にGertler とSinger、“A new structural framework for parity equation based failure detection and isolation (故障検出と分離を基にしたパリティ等式に対する新しい構造フレームワーク)”、Automatica 26:381-388, 1990 に記載されている。本発明においては、構造化残差に対する新しい設計法を開示しており、“Structured Residual Approach with Maximized Sensitivity (最大感度をもつ構造化残差アプローチ)”またはSRAMSと呼ばれる。
j番目のセンサにおける単一センサ故障の場合に対しては、次の式が成り立つ。
【0049】
【数9】
【0050】
ここでbjは行列Bのj列である。したがってモデル等式エラーは次式となる。
【0051】
【数10】
【0052】
選択された残差構造を用いると、1セットの構造化残差r(t)は、等式エラーベクトルe(t)に変換行列Wをあらかじめ乗じることにより生成できる。
【0053】
【数11】
【0054】
r(t)の各エレメントを一つの特定のセンサ故障に対して関与するが、他の故障に対して関与しないように設計することが望ましい。j番目センサが故障しているr(t)のi番目のエレメントは、次式で表わされる。
【0055】
【数12】
【0056】
ここでwiTは行列W∈Rnxmのi行である。e(t)がランダム雑音であるため、残差rij(t)を故障方向ベクトルbjに対して感知するかまたはしないようにだけ設計できる。SRAMSデザイン基準は次のように記述される。
wiをrij(t)がi番目センサ故障を感知しないが、他のものは最大感度で感知するように選ぶ。数学的には次の形と同一である。
【0057】
【数13】
【0058】
ただし、
【0059】
【数14】
【0060】
幾何学的には、wiはbiに対して直角であるように選択し、の故障方向bjj≠iに対するその角度は最小に選択する。この問題は、次のようにも表現することができる。
【0061】
【数15】
【0062】
ただし、
【0063】
【数16】
【0064】
が条件である。ここで、
【0065】
【数17】
【0066】
制約wiTbio=0を満足するために、ベクトルwiは下記のように選択する必要がある。
【0067】
【数18】
【0068】
ここでSwiはbiの90°直交補空間である。したがってwiの解はziの解に変換される。ラグランジュ乗数λを用いて、ziの解は下記の値を最大とすることにより見出せる。
【0069】
【数19】
【0070】
(I−biobioT)bio=0であるから上の式は成り立つ。次のように表わす。
【0071】
【数20】
【0072】
および
【0073】
【数21】
【0074】
上式はBoのSwiへの投影であり、最大化の問題は次のように書き換えできる。
【0075】
【数22】
【0076】
Jをziに関して微分すると次の値が得られる。
【0077】
【数23】
【0078】
ただし、次の関係に注意が必要である
【0079】
【数24】
【0080】
式20は次のように変形できる
【0081】
【数25】
【0082】
または
【0083】
【数26】
【0084】
したがってzijは、最大の固有ベクトルに相当するBiobioTの固有ベクトルである。ziが判明すると、wiは式15から容易に計算できる。
【0085】
3.3 複数故障に対する構造化残差変換
SRAMS設計法は、複数センサが同時に故障するケースに応用することができる。複数センサ故障に対する等式エラーベクトルは、次の式で表わされる。
【0086】
【数27】
【0087】
ここでBΞi∈Rmxqは、故障したセンサに対応するBのq個の列を含み、またfi(t) ∈Rqは故障の大きさのベクトルである。BΞiの列は線型関係をもつことに留意が必要である。BΞiに単一値分解(当業者によく知られている行列分解)を実施し、ゼロでない単独値のみを維持することにより次の式が得られる
【0088】
【数28】
【0089】
ここで、
【0090】
【数29】
【0091】
複数センサ故障に対してWqを設計するために、WqはUqの直交補空間内に選択する。即ち、
【0092】
【数30】
【0093】
単一センサ故障ケースに類似の次式となる。さらに、次式が最大とされる。
【0094】
【数31】
【0095】
ただし、
【0096】
【数32】
【0097】
ここで、
【0098】
【数33】
【0099】
ラグランジュ乗数を用いた後、zqは次式の解であることが明らかになる。
【0100】
【数34】
【0101】
式29から次の関係式が得られる。
【0102】
【数35】
【0103】
または
【0104】
【数36】
【0105】
したがって、zqは、単に、最大固有値に関連するBqoBqoTの固有ベクトルである。
【0106】
3.4 従来の構造化残差方法との比較
従来の構造化残差方法(一般にGertler とSinger、“A new structural framework for parity equation based failure detection and isolation (故障検出と分離を基にしたパリティ等式に対する新しい構造フレームワーク)”, Automatica 26:381-388, 1990 、およびGertler とSinger、“Augmented models for statistical fault isolation in complex dynamic systems(複雑動的システムにおける統計的故障分離に対する拡張モデル)”, Proceeding of the American Control Conference, pp317-322, 1985) は、wiを対象とする特定の故障に対して感知しないものを選択するが、他の故障に対する感度を最大にすることはない。代表的な構造化残差設計では、wiの選択は、特有のものではなく、ある程度任意である。この設計おける任意性により、故障を分離する可能性を最大にしない準最適解を導く。本発明のSRAMS方法は、wiの特有の設計を実現して、他の故障に対する感度を最大にする反面、対象の故障を感知しない。
【0107】
3.5 構造化残差ユニットにより維持される変換
本発明の好ましい実施形態において、構造化残差ユニットは、先のセクション3.2に記載の単一センサ故障に対応する構造化残差変換の中核セットを維持する。これらの中核構造化残差変換は、構造化残差変換132の初期動作セットおよび関連の故障推定変換134を形成する。
【0108】
DSCからの1つまたは複数のセンサ測定値108が、センサ確認装置への入力において不良と表示されるときは、構造化残差変換および関連の故障推定変換の新しい動作セットが、構造化残差ユニットにより形成される。これらは次の通りである。b個のセンサが入力において不良と表示されると、n−b+1の新しい構造化残差変換が設計される。第1構造化残差変換が、不良のb個のセンサに対応する恒式行列の列を選択するΞを用いて設計される。この構造化残差変換は、これらの不良センサ値を感知しないが、他のセンサのいずれの故障も感知する。残りのn−bの構造化残差変換は、不良のb個のセンサに対応する恒式行列の列に加え、相互のセンサに対応するさらにもう1つの列を選択するΞにより設計される。これにより入力で不良と表示されるセンサの外にも、別の故障センサを識別することが可能になる。
【0109】
その他の構造化残差変換は、選択的に設計して、動作セットに加えることができる。例えばΞに基づく1セットの変換を、恒式行列からのすべてのペアの列から選択する。これにより、同時に故障しているペアを識別できる。しかし、複数故障を検出する好ましい方法は、いくつかのセンサ確認装置を用いることである。例えば図1において、プロセスコントローラ60が入力として5つのセンサ値を使用する場合は、最高5つのセンサ確認装置100を使用できる。各センサ確認装置は、入力の1つおよびプロセスコントローラに入力されない他の冗長センサ測定値を使用する。
【0110】
別の方法は、いくつかのセンサ確認装置をもつものであり、そのそれぞれは特定のセンサの故障の検出および識別に最適化され、再構成のために最適化される別のセンサ確認装置に信号供給する。
【0111】
4.検出ユニット
検出ユニット140は、現在の等式エラーに基づいて検出インデックス142を計算することにより、前処理されたセンサ値の相関構造を監視する。この検出インデックスが、統計的に推定された信頼限界に基づくしきい値144を越える場合には、検出イベント148が発生し、識別ユニットが起動される。好ましい実施形態では、正規化され、フィルタ処理された故障検出インデックス(NFFDI)は、以下のように使用される。
【0112】
4.1 故障検出インデックス
故障検出インデックス(FDI)は、下記のように定義される。
【0113】
【数37】
【0114】
故障が存在しないときは、FDI=‖e*(t)‖2=‖Bx*(t)‖2である。したがって、FDIに対する検出アラームしきい値は、実際には‖e*(t)‖2に対する信頼限界である。
【0115】
4.2 正規化故障検出インデックス
実際の工業プロセスにおいて、プロセス変数x*(t)は、一般には正規分布していない。しかし、等式エラーe*(t)128は、主として測定雑音を含み、したがってゼロの平均ガウス雑音と考えることができる。したがって、e*(t)TRe−1e*(t)は、mの自由度をもつχ2分布を満足する、ここで、Re=E{e(t)eT(t)}は等式エラー共分散行列である。このように正規化された故障検出インデックスを、
【0116】
【数38】
【0117】
と定義することにより、NFDIに対するdaの検出アラームしきい値は、当業者には既知の方法で、χ2分布を用い任意の有意水準αに対し求めることができる。
【0118】
NFDI≡‖η(t)‖2、ここでη(t)=Re−1/2e(t)およびRe−1/2は逆等式エラー共分散行列の行列平方根であることに留意すること。Re−1/2は等式エラーの相関性解除の効果をもつ。
【0119】
4.3 正規化され、フィルタ処理された故障検出インデックス
好ましい実施形態においては、指数関数的に重み付けされた移動平均(EWMA)フィルタを等式エラーに適用して、測定データ中の過渡現象および雑音の効果を減少させる。
【0120】
【数39】
【0121】
したがって次式が成り立つ。
【0122】
【数40】
【0123】
および
【0124】
【数41】
【0125】
ここで、
【0126】
【数42】
【0127】
正規化され、フィルタ処理された故障検出インデックス142は、次のように定義される。
【0128】
【数43】
【0129】
故障がなければ、η(t)は正規分布するため、-η(t)はまた正規分布し、E{-η(t)}=E{(t)η}=0である。しかし、EWMAフィルタは、-η(t)の分散を大幅に減少させるため、信頼限界daを直接 -daに適用することはできない。-η(t)の分散は次の式により表わされる。
【0130】
【数44】
【0131】
ここで、
【0132】
【数45】
【0133】
は自己相関関数である。η(t)が独立的かつ同一分布している場合は、ρ(k)は任意のk>0に対して0である。しかし、実際のデータに対しては、動的な過渡現象のためにこの条件を満足することは不可能である。式36の右辺のゼロでないρ(k)は、 -daに対する検出アラームしきい値の決定に寄与する。‖η(t)‖2に対するしきい値がdaであるから、式36から、‖-η(t)‖2に対する検出アラームしきい値144が下記の式であることは、容易に知ることができる:
【0134】
【数46】
【0135】
│ρ(k)│≦1、したがって次式が成り立つことに留意すること。
【0136】
【数47】
【0137】
したがって、NFFDIに対するしきい値は、通常NFDIに対するしきい値よりも小さい。実際に、p(k)は、一定の時間k後にはゼロに減少し、検出ユニットだけが固定数の項を維持して -daを計算する。有意性αは、検出ユニットの調節可能なパラメータである。
図4はNFFDINが故障発生を急速に増加している様子を示す。
【0138】
5.識別ユニット
識別ユニット150は、検出ユニットが検出イベントを発生する場合に、起動される。識別ユニットは、インデックス152のいくつかのセットを計算し、それを用いて、検出された故障を1つまたは複数のセンサの故障に識別できるかどうかを判定する。各セットのインデックスは、構造化残差ユニット130により維持される有効セットの構造化残差から算出される。一般に1つのセットにおける単一インデックスがしきい値よりも小さく、一方でそのセットの中のすべての他のインデックスがしきい値よりも大きい場合には、既知の方向の故障が識別される。この故障の方向は、インデックスに関連する構造化残差を定義する方向に一致する。最も一般的な場合は、この故障は単一センサの故障に相当する。
【0139】
本発明の好ましい実施形態において、識別ユニットは、3セットのインデックス152およびそれらの関連しきい値154を維持する。これらのインデックスのセットは、正規化され、自乗され、フィルタ処理された構造化残差(NSFSR)、一般化公算比(GLR)インデックス、および正規化累積加算分散(NCUMVAR)インデックスである。関連しきい値は、gNSFSR、gGLRおよびgNCUMVARにより表わされる。図2に、故障識別プロセスを要約したフローダイアグラムを示す。
【0140】
5.1 正規化され、自乗され、フィルタ処理された構造化残差
理論的には、各構造化残差ri(t)は、センサが故障しないときはゼロであるか、またはゼロに近いと想定される。しかし、モデル化エラー、測定値ノイズおよび他の不確定性のために、ri(t)はゼロに等しくない。したがって、各ri(t) i,j=1,2,Λ,nに対するゼロでない信頼限界は、統計技法を用いて求められる。
【0141】
故障がないか、またはi番目の構造化残差が故障のセンサ(複数もある)では、i番目の構造化残差は正規分布に従う。
【0142】
【数48】
【0143】
ここでRe=E{e(t)eT(t)}は等式エラー共分散行列である。
したがって、
【0144】
【数49】
【0145】
次に、i番目の正規化構造化残差(NSR)を、
【0146】
【数50】
【0147】
として定義し、正規化され自乗された構造化残差(NSSR)をvi2(t)と定義することにより、NSSRに対する信頼限界はχa2(1)になる、ここで、αは有意水準である。
【0148】
EWMAフィルタをNSRに適用すると、正規化されフィルタ処理された構造化残差(NFSR)は、次式で表わされる。
【0149】
【数51】
【0150】
故障がないか、またはi番目の構造化残差が故障のセンサ(複数もある)では、NFSRも次式による正規分布に従う。
【0151】
【数52】
【0152】
および
【0153】
【数53】
【0154】
ここで
【0155】
【数54】
【0156】
は自己相関関数である。
【0157】
したがって、 -vi2(t)により定義された、正規化され自乗されフィルタ処理された構造化残差(NSFSR)、に対するアラームしきい値は、次の式により示されるアラームしきい値をもつ。
【0158】
【数55】
【0159】
すべてのセンサが正常であれば、 -vi2(t)は、次の式により示されるアラームしきい値を通常下回る。
【0160】
【数56】
【0161】
i番目の構造化残差に関連するセンサ(複数もあり)がSRAMS設計により故障の場合には、-vi2(t)は故障の影響を受けることはない。しかし他の残差-vi2(t) j≠iは大幅に増大する、なぜなら、それらの他のセンサの故障に対する感度は最大であるからである。
【0162】
したがって、選択された有意水準αおよび時点tを用いると、NSFSRsの中で、そのしきい値giNSFSRより小さい正確な1つのNSFSRが存在することにより、故障センサを識別し、識別イベント158を発生することになる。この例は図7に示され、その中で上のウインドウは故障センサ5に対応しないNSFSRは極めて大きくなるのに対し、下のウインドウはセンサ5に対するNSFSRはそのしきい値を下回ったままであることを示す。
【0163】
多数のセンサの性能を確認することが多いため、たとえ各インデックスがそのしきい値を上回る確率が低くても、最低限1つの残差がそのしきい値を上回る確率をもつことは有意である。例えば20の残差があると仮定すると、ri(t) i=1,2,Λ,20である。少なくとも一つのNSFSRがそのしきい値を上回る確率は(α=0.05と仮定して)、すべてのセンサが正常であっても
P=1−(1−α)20=1−0.9520=0.642
である。したがって、NSFSRは、故障検出に対して使用されない。代わりに、検出ユニットは、NFFDIを用いて検出イベントをトリガーし、その後に識別ユニットが、各種セットのインデックスを使用して、NSFSRから始めて、故障センサを識別する。
【0164】
検出ユニットが検出イベントを発生しても、いなくても、選択的にNSFSRインデックスを各サイクルにおいて計算できる。しかし、次の2つのセクションに記載したインデックスセットは、故障検出の時点以降、構造化残差情報を累積加算する。したがって、それらは検出イベントの発生以降においてのみ有効である。
【0165】
5.2 一般化された公算比インデックス
センサ故障が平均して有意な変化、例えば完全故障、バイアス、ドリフトを生じる場合は、一般化された公算比(GLR)は、通常これを検出するのに適正な検定法である(Benveniste, BassevilleおよびMoustakides “The asymptotic local approach to change detection and model validation (検出とモデル確認変化に対する漸近軌跡方法)”、IEEE Trans. Auto. Cont. 32(7):538-592, July 1987)。
【0166】
以下の分析を明瞭に示すために、各構造化残差変換は、単一センサにおける故障に相当すると仮定する。しかし、一般には、GLRインデックスは、構造化残差設計には関係なく構成し、監視することができる。
【0167】
式42に示すように、センサが故障でなければ、vi(t)はゼロの平均であり、単位分散をもつ正規分布を示す。しかしj番目のセンサがtfの時点で故障を発生すると、次式
【0168】
【数57】
【0169】
となり、ゼロの平均ではなく、分散は変化しないことが明らかである。言い換えれば次式が成り立つ。
【0170】
【数58】
【0171】
ここで
【0172】
【数59】
【0173】
SRAMS設計より、μjj=0である。
【0174】
vi(t)の平均変化を検出するために、下記のGLR関数を定義する。
【0175】
【数60】
【0176】
μijに関してStft(μij)を微分することにより、μijの最適の推定値が求められる。
【0177】
【数61】
【0178】
<μijを用いると、Stft(μij)は最大となり次式が成り立つ。
【0179】
【数62】
【0180】
j番目のセンサが故障であれば、μjj=0、およびvj(t)〜X(0,1)である。式50から次式が成り立つ。
【0181】
【数63】
【0182】
または
【0183】
【数64】
【0184】
したがって、選択された有意水準αおよび時点tを用いると、次のnGLRsの中で、
【0185】
【数65】
【0186】
しきい値gGLR=χa2(1)よりも小さい確実に1つのGLRが存在することにより、故障したセンサを特定し、識別イベント158を発生する。
【0187】
5.3 正規化された累積加算分散インデックス
センサが精度劣化故障を生じた場合、GLRインデックスセットはそれを識別するのが困難である。精度劣化故障の位置を識別するため、NSRの平均および分散が、故障の生じた時点以降計算される。
【0188】
【数66】
【0189】
説明を判りやすくするために、各構造化残差変換が単一センサの故障に相当すると仮定すれば、故障のセンサがないか、またはi番目のセンサが故障のときは、次式が成り立つ。
【0190】
【数67】
【0191】
したがって、選択された有意水準αおよび時点tを用いると、n個のNCUMVARs間で、しきい値gNCUMVAR={1/(t−tf) }χa2(t−tf−1)よりも小さい確実に1つのNCUMVARが存在すると、精度故障をもつセンサを識別定し、識別イベント158を発生する。
【0192】
6.推定ユニット
推定ユニット160は、識別ユニット150が識別イベント158を発生した場合だけ、起動される。この時、推定ユニットは、識別イベントを発生するのに機能した構造化残差変換に対応するモデルに基づく故障の大きさ、故障データおよび行列Ξiを最適の形で推定する。この最適推定は、例えばMartens とNaes“Multivariate Calibration(多変量キャリブレーション)”、John Wiley and Sons, New York, 1989 に記載された公開されている既知の方法に基づくものである。
【0193】
最適推定は、方向Uqでの時間関数fq(t)を選択することにより得られる。ここでは、式24と同様に、Uqが非単一値だけをその中に維持するBΞiにおける単一値分解の直交左側行列である。言い換えれば、次式を最小にすることである。
【0194】
【数68】
【0195】
この問題の少なくとも1つの自乗解は次式になる。
【0196】
【数69】
【0197】
最初の故障の大きさfi(t)は、式25を用いて推定できる。
【0198】
【数70】
【0199】
ここで( )+は、当業者には既知のMoore-Penrose 疑似逆関数である。構造化残差ユニット130は、それが維持する各構造化残差に対して推定行列134
【0200】
【数71】
【0201】
を維持する。故障を識別した構造化残残差に対応する推定行列を使用して、等式エラー128を、前処理されたセンサ値スペース136内の故障ベクトルの推定に写像する。次に、推定ユニットは、前処理ユニットからの逆拡大縮小化116を適用して、最初のセンサスペース168内に故障ベクトルの推定を得る。
【0202】
【数72】
【0203】
図5は、センサ2のバイアス故障に対する推定ユニットの出力を示す。図6は、センサ5のドリフト故障に対する推定ユニットの出力を示す。両者の場合、故障サイズは正確に推定される。
【0204】
7.代替ユニット
代替ユニット170は、推定ユニットにより推定された(式56)最初のセンサスペース168における故障ベクトルの推定を単純に行い、センサ値108の測定されたベクトルから、推定された故障を差し引いて代替値178のベクトルを生成する。
【0205】
【数73】
【0206】
代替ユニットは、推定ユニット160が機能するときだけ機能し、また識別ユニット150が識別イベント158を発生した場合だけ機能する。さらに安全機能として、装置のオペレータは、代替ユニットの機能を確実に無効にできる。
【0207】
8.分類ユニット
分類ユニット180は、センサの故障のタイプに関する診断情報を計算する。特に4タイプの故障、すなわち完全故障、バイアス、ドリフトおよび精度劣化が考慮される。
【0208】
分類ユニットは、分類イベント158が発生しているときだけ機能する。センサが最初に故障であると識別された時点から、測定されたセンサ値のバッファを維持し、当該センサに対する推定故障サイズのバッファもまた維持する。これらの2つのバッファにおける情報を分析し、それを用いて該当センサに対する故障のタイプを分類する。分析は主として統計的推定を使用し、したがって分類ユニットの調節可能なパラメータである有意水準αを必要とする。
【0209】
説明を判りやすくするために、単一センサ故障が、識別ユニット150により識別されていることを前提とする。分類ロジックのフローダイアグラムは、図3に示されている。
【0210】
8.1 分類タイプ:完全故障
完全故障は、故障センサの測定値108に関する回帰分析を実施することにより求められ、回帰線が良く一致し、ゼロの傾きをもつ統計推定により表示される。
【0211】
{k,ui(k)│k=tid,Λ,t}を回帰線が計算される点のシーケンスとする。ここで、tidはセンサが故障と識別された点であり、またtは現在の時点である。
【0212】
標準最小自乗回帰を用いて、点と最良の一致線との間の残差値を最小にすることにより、傾きβおよびy−切片αが次のように推定される。
【0213】
【数74】
【0214】
ここで
【0215】
【数75】
【0216】
傾きが統計的にゼロに等しいかどうかを調べるために、下記の統計値を作成する。
【0217】
【数76】
【0218】
ここで <βの標準偏差は次式で求められる。
【0219】
【数77】
【0220】
そして残差の標準偏差σは次式により推定される。
【0221】
【数78】
【0222】
ここで、
【0223】
【数79】
【0224】
は残差エラーである。
式60により得られる統計値は、t−tid−1の自由度をもつスチューデントt分布を満足する(例えばBirkesおよびDodge “Alternative Method of Regression(回帰の代替方法)”、John Wiley & Sons 1993を参照のこと)。
回帰線の一致度は、特定のしきい値を上回る線型相関係数により求められる。
【0225】
8.2 分類タイプ:バイアス
バイアスは、推定ユニット160により計算された故障センサの故障サイズ推定168に関する回帰分析を実施することにより求められ、回帰線が良く一致し、ゼロの傾きをもち、ゼロでないバイアスをもつことを統計的に推定して示される。
{k,fi(k)│k=tid,Λ,t}を、回帰線を計算する一連の点とする。ここで、tidは、センサが故障と識別される点であり、tは現時点である。ゼロの傾きに対する検定は、故障サイズシーケンスfi(k)がセンサ値シーケンスui(k)に替わる以外は、完全欠陥の分類と同じである。回帰線の一致度は、特定のしきい値を越える線型相関係数により求められる。
ゼロでないバイアスを検定するために次の統計値を用いる。
【0226】
【数80】
【0227】
これは、t−tid−1の自由度をもつスチューデントt分布をも満足する。
【0228】
8.3 分類タイプ:ドリフト
ドリフトは、推定ユニット160により計算された故障センサの故障サイズ推定168に関する回帰分析を行うことにより求められ、回帰線が良く適合し、ゼロでない傾きをもつことを統計的に推定して示される。
【0229】
8.4 分類タイプ:精度劣化
精度劣化は、推定ユニット160により計算された故障センサの故障サイズ推定168に関する回帰分析を実施することにより求められ、回帰線が良く適合せず、ゼロの傾きをもち、またゼロのバイアスをもつことを統計的に推定して示される。
【0230】
精度劣化は、識別イベント158がセクション5.3のNCUMVAR検定により発生した場合にも表示される。
【0231】
9.均等物
上記の詳細は、本発明の好ましい実施形態に関するものである。本発明は、これらの詳細には限定されるものではないと理解されるべきである。当業者によって行われる代替および変更は、本発明の精神から逸脱することなく細部の実施形態に対して実施できる。これらの改変は、本発明の範囲内にあるものとする。
【図面の簡単な説明】
【0232】
【図1】本発明の好ましい実施形態の8つの演算ユニットおよびこれらのユニット間の関係を示す。
【図2】図1の実施形態における識別プロセスのフローダイアグラムを示す。
【図3A】図1の実施形態における分類プロセスのフローダイアグラムを示す。
【図3B】図1の実施形態における分類プロセスのフローダイアグラムを示す。
【図4】ボイラプロセスでの故障の発生時に、急速に増大し、しきい値を上回る本発明の検出インデックスを示す。
【図5】ボイラプロセスのセンサ2におけるバイアス故障の発生時の推定ユニットの出力を示す。
【図6】ボイラプロセスのセンサ5におけるドリフト故障の発生時の推定ユニットの出力を示す。
【図7A】ボイラプロセスのセンサ5におけるドリフト故障の発生時に応答する本発明のNSFSRインデックスを示す。
【図7B】ボイラプロセスのセンサ5におけるドリフト故障の発生時に応答する本発明のNSFSRインデックスを示す。
【特許請求の範囲】
【請求項1】
測定されるプロセス中の1つまたは複数のセンサの故障を検出する装置であって、
測定されたセンサ値を含む信号の動作ベクトルを受け取り、前記測定されたセンサ値を正規化して、前処理されたセンサ値を生成する前処理ユニットと、
その前処理ユニットに結合され、前処理されたセンサ値を、主として測定雑音を含む等式エラー値に変換するモデルユニットと、
そのモデルユニットに結合され、構造化残差変換と称する複数の変換を含む構造化残差ユニットであって、各変換が等式エラー値を構造化残差値に変換し、各変換がセンサのサブセットの故障を感知しないように設計されている、構造化残差ユニットと、
前記モデルユニットに結合され、前記等式エラー値の間の関係を監視し、予測された関係からの前記関係の有意偏差の発生により検出イベントを生成する検出ユニットと、
前記構造化残差ユニットおよび検出ユニットに結合され、検出イベントにより起動されて、前記構造化残差値を用いて1つまたは複数のセンサの故障の有無を判定し、その判定により識別イベントを生成する識別ユニットと、
前記前処理ユニット、構造化残差ユニットおよび識別ユニットに結合され、識別イベントにより起動されて、前記識別された故障センサのそれぞれについて故障サイズを推定する推定ユニットと、
その推定ユニットに結合され、識別されたすべての故障について、対応する前記測定されたセンサ値から前記推定された故障サイズを差し引くことにより、前記動作信号値中の前記故障の測定されたセンサ値について代替値を計算する代替ユニットと、
前記推定ユニットに結合され、前記推定ユニットが起動しているときに起動して、前記識別されたセンサ故障を故障タイプの固定セットに分類する分類ユニットとを備えた装置。
【請求項2】
請求項1において、前記前処理ユニットにおける正規化が、前記測定されたセンサ値を拡大縮小およびオフセットすることにより達成される装置。
【請求項3】
請求項1において、前記動作信号が、前記測定されたセンサ値に関する既知の状態の情報を含む装置。
【請求項4】
請求項1において、前記モデルユニットにおける変換が、前記前処理されたセンサ値に行列を乗じて前記等式エラーを生成することにより達成される装置。
【請求項5】
請求項4において、前記行列を主要コンポーネント分析の残差部分から算出する装置。
【請求項6】
請求項4において、前記行列を、各センサ値に1つの、1セットの部分最小自乗モデルの残差部分から算出する装置。
【請求項7】
請求項4において、前記行列を、前記測定されるプロセスの質量バランスまたはエネルギーバランスから算出する装置。
【請求項8】
請求項1において、前記構造化残差ユニットの各変換が前記等式エラーとのベクトル点乗積の形をもつ装置。
【請求項9】
請求項1において、前記構造化残差ユニットの各変換が、センサのサブセットの故障を感知せず、サブセット外の他のすべてのセンサの故障を最大限感知するように設計されている装置。
【請求項10】
請求項1において、前記構造化残差ユニットの各変換が、単一センサの故障を感知せず、他のすべてのセンサの故障を最大限感知するように設計されている装置。
【請求項11】
請求項1において、各変換を定義する前記センサのサブセットが、既知の不具合状態のすべてのセンサを少なくとも含む装置。
【請求項12】
請求項1において、前記検出ユニットが前記等式エラー値の間の関係を、
前記等式エラーの関数である検出インデックスを計算し、
前記検出インデックスをしきい値と比較して、予測された関係からの前記関係の有意偏差の発生を検出することにより監視する装置。
【請求項13】
請求項12において、前記検出インデックスが、前記等式エラー値を自乗して加算することにより得られる装置。
【請求項14】
請求項12において、前記等式エラーに行列を乗じ前記等式エラー値の相関性が解除されて、相関性を解除された等式エラー値が生成され、
前記検出インデックスが、前記相関性を解除された等式エラー値を自乗して加算することにより得られる装置。
【請求項15】
請求項13または14において、前記しきい値が統計手法を用いて決定される装置。
【請求項16】
請求項13または14において、前記検出インデックスが少なくとも時間に関してフィルタ処理され、過渡現象および雑音の影響を平滑化して、フィルタ処理された検出インデックスが生成され、
前記フィルタ処理された検出インデックスを前記検出インデックスの代わりに用いて、前記等式エラー値の間の関係を監視し、
前記フィルタ処理された検出インデックスをしきい値と比較して、予測された関係からの前記関係の有意偏差の発生を検出する装置。
【請求項17】
請求項16において、前記検出インデックスが、指数関数的に重み付けされた移動平均値フィルタの適用によりフィルタ処理される装置。
【請求項18】
請求項17において、前記フィルタ処理された検出インデックスについての前記しきい値が、自己相関関数を用いて前記検出インデックスしきい値から計算される装置。
【請求項19】
請求項1において、前記識別ユニットが、各構造化残差値を対応するしきい値と比較し、
前記識別された構造化残差値と称する1つの構造化残差値を除くすべての前記構造化残差値が、対応するしきい値を上回る場合には、識別イベントが発生し、
前記判定された故障センサが前記センサのサブセットであり、設計により、そのサブセットについて、前記識別された構造化残差値に対応する前記構造化残差変換が前記サブセットの故障の存在を感知しない装置。
【請求項20】
請求項1において、前記識別ユニットが、前記構造化残差値に変換操作を適用して、変換された構造化残差インデックスを生成し、
前記識別ユニットが、各変換された構造化残差インデックスを対応するしきい値と比較し、
前記変換され識別された構造化残差インデックスと称する1つの構造化残差を除くすべての前記変換された構造化残差インデックスが、対応するしきい値を上回る場合には、識別イベントが発生し、
前記判定された故障センサが前記センサのサブセットであり、設計により、そのサブセットについて、前記変換された構造化残差インデックスに対応する前記構造化残差変換が前記サブセットの故障の存在を感知しない装置。
【請求項21】
請求項20において、前記変換操作が自乗および拡大縮小の操作を含む装置。
【請求項22】
請求項20において、前記変換操作が、指数関数的に重み付けした、時間における移動平均フィルタを適用することを含む装置。
【請求項23】
請求項22において、各変換された構造化残差インデックスについての前記しきい値が、自己相関関数を用いて前記対応する構造化残差しきい値から計算される装置。
【請求項24】
請求項1において、前記識別ユニットが、前記構造化残差値に、前記故障検出イベントの時点から累積する累積操作を適用して、累積された構造化残差インデックスを生成し、
前記識別ユニットが、各累積された構造化残差インデックスを対応するしきい値と比較し、
前記累積され識別された構造化残差インデックスと称する1つの構造化残差を除くすべての前記累積された構造化残差インデックスが、対応するしきい値を上回る場合には、識別イベントが発生し、
前記判定された故障センサが前記センサのサブセットであり、設計により、そのサブセットについて、前記累積され識別された構造化残差インデックスに対応する前記構造化残差変換が前記サブセットの故障の存在を感知しない装置。
【請求項25】
請求項24において、前記累積操作で、前記故障検出イベントの時点からの前記構造化残差の統計的平均における有意変化を検出するよう設計された、一般化公算比インデックスを計算する装置。
【請求項26】
請求項24において、前記累積操作で、前記故障検出イベントの時点からの前記構造化残差の統計的平均を計算し、累積された平均インデックスを生成する装置。
【請求項27】
請求項24において、前記累積操作で、前記故障検出イベントの時点からの構造化残差の統計的分散を計算し、累積された分散インデックスを生成する装置。
【請求項28】
請求項1において、前記識別されたセンサ故障のそれぞれについて推定される故障サイズを、前記等式エラー値への前記識別されたセンサ故障の影響を最小にすることにより計算する装置。
【請求項29】
請求項1において、前記分類ユニットが、識別された各故障センサに対し1つずつ、複数の回帰線を計算し、この各回帰線は前記識別の時点からの前記対応する故障センサについて測定されたセンサ値を用いて計算し、複数のセンサ値回帰線を生成し、
前記分類ユニットが、識別された各故障センサに対し1つずつ、複数の回帰線を計算し、この各回帰線は前記識別の時点からの前記対応する故障センサについて推定される故障サイズを用いて計算し、複数の故障サイズ回帰線を生成し、
前記分類ユニットが、センサ値回帰線ならびに故障サイズ回帰線からの傾き、バイアスおよび残差情報を用いて、前記識別されたセンサ故障を故障タイプの固定セットに分類する装置。
【請求項30】
請求項29において、前記対応するセンサ値回帰線の残差がしきい値を下回り、前記対応するセンサ値回帰線の傾きが統計的にゼロに等しい場合には、故障センサを“完全故障”タイプとして分類する装置。
【請求項31】
請求項29において、前記対応する故障サイズ回帰線の残差がしきい値を下回り、前記対応する故障サイズ回帰線の傾きが統計的にゼロに等しく、前記対応する故障サイズ回帰線のバイアスが統計的にゼロに等しくない場合には、故障センサを “バイアス” タイプとして分類する装置。
【請求項32】
請求項29において、前記対応する故障サイズ回帰線の残差がしきい値を下回り、前記対応する故障サイズ回帰線の傾きが統計的にゼロに等しくない場合には、故障センサを “ドリフト” タイプとして分類する装置。
【請求項33】
請求項29において、前記対応する故障サイズ回帰線の残差がしきい値を上回り、前記対応する故障サイズ回帰線の傾きおよびバイアスがともに統計的にゼロに等しい場合には、故障センサを “精度劣化” タイプとして分類する装置。
【請求項34】
請求項26において、前記識別イベントが、対応するしきい値を上回る累積された分散インデックスにより発生する場合には、故障センサを “精度劣化” タイプとして分類する装置。
【請求項35】
コンピュータを用いて、測定されるプロセスにおける1つまたは複数のセンサ故障を検出する方法であって、
測定されたセンサ値を含む信号の動作ベクトルを受け取り、前記測定されたセンサ値を前処理して、前処理されたセンサ値を生成するステップと、
前記前処理されたセンサ値を、主として測定雑音を含む等式エラー値に変換するステップと、
複数の変換を前記等式エラー値に適用して複数の構造化残差値を生成するステップであって、前記変換が、構造化残差変換と称され、センサのサブセットの故障を感知しないように設計されているステップと、
前記等式エラー値の間の関係を監視し、予測された関係からの前記関係の有意偏差の発生により検出イベントを生成するステップと、
検出イベントが発生した場合に、前記構造化残差値を用いて1つまたは複数のセンサの故障の有無を判定し、その判定により識別イベントを生成するステップと、
識別イベントが発生した場合に、前記識別された故障センサのそれぞれについて故障サイズを推定するステップと、
識別イベントが発生した場合、識別されたすべての故障について、対応する前記測定されたセンサ値から前記推定された故障サイズを差し引くことにより、前記動作信号中の故障の測定されたセンサ値を修正された値に置き換えるステップと、
識別イベントが発生した場合、前記識別されたセンサ故障を故障タイプの固定セットに分類するステップとを備えた方法。
【請求項36】
請求項35において、前記測定されたセンサ値を前処理するステップが、拡大縮小およびオフセットすることにより達成される方法。
【請求項37】
請求項35において、前記動作信号が、前記測定されたセンサ値に関する既知の状態の情報を含む方法。
【請求項38】
請求項35において、前記前処理されたセンサ値を等式エラー値に変換するステップが、前記前処理されたセンサ値に行列を乗じることにより達成される方法。
【請求項39】
請求項38において、前記行列を主要コンポーネント分析の残差部分から算出する方法。
【請求項40】
請求項38において、前記行列を、各センサ値に1つの、1セットの部分最小自乗モデルの残差部分から算出する方法。
【請求項41】
請求項38において、前記行列を、前記測定されるプロセスの質量バランスまたはエネルギーバランスから算出する方法。
【請求項42】
請求項35において、各構造化残差変換が、前記等式エラーへの点乗積として適用される係数のベクトルからなる方法。
【請求項43】
請求項35において、各構造化残差変換が、センサのサブセットの故障を感知せず、サブセット外の他のすべてのセンサの故障を最大限感知するように設計されている方法。
【請求項44】
請求項35において、各構造化残差変換が、単一センサの故障を感知せず、他のすべてのセンサの故障を最大限感知するように設計されている方法。
【請求項45】
請求項35において、各変換を定義する前記センサのサブセットが、既知の不具合状態のすべてのセンサを少なくとも含む方法。
【請求項46】
請求項35において、前記等式エラー値の間の関係を監視するステップが、
前記等式エラーの関数である検出インデックスを計算することと、
前記検出インデックスをしきい値と比較して、予測された関係からの前記関係の有意偏差の発生を検出することとからなる方法。
【請求項47】
請求項46において、前記検出インデックスが、前記等式エラー値の自乗値を加算することにより得られる方法。
【請求項48】
請求項46において、前記等式エラーに行列を乗じ前記等式エラー値の相関性が解除されて、相関性を解除された等式エラー値が生成され、
前記検出インデックスが、前記相関性を解除された等式エラー値を自乗して加算することにより得られる方法。
【請求項49】
請求項47または48において、前記しきい値が統計技法を用いて決定される方法。
【請求項50】
請求項47または48において、前記検出インデックスが少なくとも時間に関してフィルタ処理され、過渡現象および雑音の影響を平滑化して、フィルタ処理された検出インデックスが生成され、
前記フィルタ処理された検出インデックスを前記検出インデックスの代わりに用いて、前記等式エラー値の間の関係を監視し、
前記フィルタ処理された検出インデックスをしきい値と比較して、予測された関係からの前記関係の有意偏差の発生を検出する方法。
【請求項51】
請求項50において、前記検出インデックスが、指数関数的に重み付けされた移動平均フィルタの適用によりフィルタ処理される方法。
【請求項52】
請求項51において、前記フィルタ処理された検出インデックスについての前記しきい値が、自己相関関数を用いて前記検出インデックスしきい値から計算される方法。
【請求項53】
請求項35において、1つまたは複数のセンサの故障の有無を判定するステップが、
各構造化残差値を対応するしきい値と比較することと、
前記識別された構造化残差値と称する1つの構造化残差値を除くすべての前記構造化残差値が、対応するしきい値を上回る場合には、識別イベントを発生することと、
前記故障センサが前記センサのサブセットであると判定することとからなり、そのサブセットについて、設計により、前記識別された構造化残差値に対応する構造化残差変換が前記サブセットの故障の存在を感知しない方法。
【請求項54】
請求項35において、前記構造化残差値に変換操作を適用して、変換された構造化残差インデックスを生成する方法であって、1つまたは複数のセンサの故障の有無を判定するステップが、
各変換された構造化残差インデックスを対応するしきい値と比較することと、
前記変換され識別された構造化残差インデックスと称する構造化残差の1つを除くすべての前記変換された構造化残差インデックスが、対応するしきい値を上回る場合には、識別イベントを発生することと、
前記故障センサが前記センサのサブセットであると判定することとからなり、そのサブセットについて、設計により、前記変換された構造化残差インデックスに対応する構造化残差変換が前記サブセットの故障の存在を感知しない方法。
【請求項55】
請求項54において、前記変換操作が自乗および拡大縮小の操作を含む方法。
【請求項56】
請求項54において、前記変換操作が、指数関数的に重み付けした、時間における移動平均フィルタを適用することを含む方法。
【請求項57】
請求項56において、各変換された構造化残差インデックスについての前記しきい値が、自己相関関数を用いて前記対応する構造化残差しきい値から計算される方法。
【請求項58】
請求項35において、前記構造化残差値に、前記故障検出イベントの時点から累積する累積操作を適用して、累積された構造化残差インデックスを生成する方法であって、1つまたは複数のセンサの故障の有無を判定するステップが、
各累積された各構造化残差インデックスを対応するしきい値と比較することと、
前記累積され識別された構造化残差インデックスと称する1つの構造化残差を除くすべての前記累積された構造化残差インデックスが、対応するしきい値を上回る場合には、識別イベントを発生することと、
前記故障センサが前記センサのサブセットであると判定することとからなり、そのサブセットについて、設計により、前記累積され識別された構造化残差インデックスに対応する前記構造化残差変換が前記サブセットの故障の存在を感知しない方法。
【請求項59】
請求項58において、前記累積操作で、前記故障検出イベントの時点からの前記構造化残差の統計的平均における有意変化を検出するよう設計された、一般化公算比インデックスを計算する方法。
【請求項60】
請求項58において、前記累積操作で、前記故障検出イベントの時点からの前記構造化残差の統計的平均を計算し、累積された平均インデックスを生成する方法。
【請求項61】
請求項58において、前記累積操作で、前記故障検出イベントの時点からの構造化残差の統計的分散を計算し、累積された分散インデックスを生成する方法。
【請求項62】
請求項35において、前記識別されたセンサ故障のそれぞれについて推定される故障サイズを、前記等式エラー値への前記識別されたセンサ故障の影響を最小にすることにより計算する方法。
【請求項63】
請求項35において、前記識別されたセンサ故障を故障タイプの固定セットに分類するステップが、
識別された各故障センサに対し1つずつ、複数の回帰線を計算し、この各回帰線は前記識別の時点からの前記対応する故障センサについて測定されたセンサ値を用いて計算し、複数のセンサ値回帰線を生成することと、
識別された各故障センサに対し1つずつ、複数の回帰線を計算し、この各回帰線は前記識別の時点からの前記対応する故障センサについて推定される故障サイズを用いて計算し、複数の故障サイズ回帰線を生成することと、
センサ値回帰線ならびに故障サイズ回帰線からの傾き、バイアスおよび残差情報を用いて、前記識別されたセンサ故障を故障タイプの固定セットに分類することとにより達成される方法。
【請求項64】
請求項63において、前記対応するセンサ値回帰線の残差がしきい値を下回り、前記対応するセンサ値回帰線の傾きが統計的にゼロに等しい場合には、故障センサを “完全故障” タイプとして分類する方法。
【請求項65】
請求項63において、前記対応する故障サイズ回帰線の残差がしきい値を下回り、前記対応する故障サイズ回帰線の傾きが統計的にゼロに等しく、前記対応する故障サイズ回帰線のバイアスが統計的にゼロに等しくない場合には、故障センサを “バイアス” タイプとして分類する方法。
【請求項66】
請求項63において、前記対応する故障サイズ回帰線の残差がしきい値を下回り、前記対応する故障サイズ回帰線の傾きが統計的にゼロに等しくない場合には、故障センサを “ドリフト” タイプとして分類する方法。
【請求項67】
請求項63において、前記対応する故障サイズ回帰線の残差がしきい値を上回り、前記対応する故障サイズ回帰線の傾きおよびバイアスがともに統計的にゼロに等しい場合には、故障センサを “精度劣化”タイプとして分類する方法。
【請求項68】
請求項60において、前記識別イベントが、対応するしきい値を上回る累積された分散インデックスにより発生する場合には、故障センサを “精度劣化”タイプとして分類する方法。
【請求項1】
測定されるプロセス中の1つまたは複数のセンサの故障を検出する装置であって、
測定されたセンサ値を含む信号の動作ベクトルを受け取り、前記測定されたセンサ値を正規化して、前処理されたセンサ値を生成する前処理ユニットと、
その前処理ユニットに結合され、前処理されたセンサ値を、主として測定雑音を含む等式エラー値に変換するモデルユニットと、
そのモデルユニットに結合され、構造化残差変換と称する複数の変換を含む構造化残差ユニットであって、各変換が等式エラー値を構造化残差値に変換し、各変換がセンサのサブセットの故障を感知しないように設計されている、構造化残差ユニットと、
前記モデルユニットに結合され、前記等式エラー値の間の関係を監視し、予測された関係からの前記関係の有意偏差の発生により検出イベントを生成する検出ユニットと、
前記構造化残差ユニットおよび検出ユニットに結合され、検出イベントにより起動されて、前記構造化残差値を用いて1つまたは複数のセンサの故障の有無を判定し、その判定により識別イベントを生成する識別ユニットと、
前記前処理ユニット、構造化残差ユニットおよび識別ユニットに結合され、識別イベントにより起動されて、前記識別された故障センサのそれぞれについて故障サイズを推定する推定ユニットと、
その推定ユニットに結合され、識別されたすべての故障について、対応する前記測定されたセンサ値から前記推定された故障サイズを差し引くことにより、前記動作信号値中の前記故障の測定されたセンサ値について代替値を計算する代替ユニットと、
前記推定ユニットに結合され、前記推定ユニットが起動しているときに起動して、前記識別されたセンサ故障を故障タイプの固定セットに分類する分類ユニットとを備えた装置。
【請求項2】
請求項1において、前記前処理ユニットにおける正規化が、前記測定されたセンサ値を拡大縮小およびオフセットすることにより達成される装置。
【請求項3】
請求項1において、前記動作信号が、前記測定されたセンサ値に関する既知の状態の情報を含む装置。
【請求項4】
請求項1において、前記モデルユニットにおける変換が、前記前処理されたセンサ値に行列を乗じて前記等式エラーを生成することにより達成される装置。
【請求項5】
請求項4において、前記行列を主要コンポーネント分析の残差部分から算出する装置。
【請求項6】
請求項4において、前記行列を、各センサ値に1つの、1セットの部分最小自乗モデルの残差部分から算出する装置。
【請求項7】
請求項4において、前記行列を、前記測定されるプロセスの質量バランスまたはエネルギーバランスから算出する装置。
【請求項8】
請求項1において、前記構造化残差ユニットの各変換が前記等式エラーとのベクトル点乗積の形をもつ装置。
【請求項9】
請求項1において、前記構造化残差ユニットの各変換が、センサのサブセットの故障を感知せず、サブセット外の他のすべてのセンサの故障を最大限感知するように設計されている装置。
【請求項10】
請求項1において、前記構造化残差ユニットの各変換が、単一センサの故障を感知せず、他のすべてのセンサの故障を最大限感知するように設計されている装置。
【請求項11】
請求項1において、各変換を定義する前記センサのサブセットが、既知の不具合状態のすべてのセンサを少なくとも含む装置。
【請求項12】
請求項1において、前記検出ユニットが前記等式エラー値の間の関係を、
前記等式エラーの関数である検出インデックスを計算し、
前記検出インデックスをしきい値と比較して、予測された関係からの前記関係の有意偏差の発生を検出することにより監視する装置。
【請求項13】
請求項12において、前記検出インデックスが、前記等式エラー値を自乗して加算することにより得られる装置。
【請求項14】
請求項12において、前記等式エラーに行列を乗じ前記等式エラー値の相関性が解除されて、相関性を解除された等式エラー値が生成され、
前記検出インデックスが、前記相関性を解除された等式エラー値を自乗して加算することにより得られる装置。
【請求項15】
請求項13または14において、前記しきい値が統計手法を用いて決定される装置。
【請求項16】
請求項13または14において、前記検出インデックスが少なくとも時間に関してフィルタ処理され、過渡現象および雑音の影響を平滑化して、フィルタ処理された検出インデックスが生成され、
前記フィルタ処理された検出インデックスを前記検出インデックスの代わりに用いて、前記等式エラー値の間の関係を監視し、
前記フィルタ処理された検出インデックスをしきい値と比較して、予測された関係からの前記関係の有意偏差の発生を検出する装置。
【請求項17】
請求項16において、前記検出インデックスが、指数関数的に重み付けされた移動平均値フィルタの適用によりフィルタ処理される装置。
【請求項18】
請求項17において、前記フィルタ処理された検出インデックスについての前記しきい値が、自己相関関数を用いて前記検出インデックスしきい値から計算される装置。
【請求項19】
請求項1において、前記識別ユニットが、各構造化残差値を対応するしきい値と比較し、
前記識別された構造化残差値と称する1つの構造化残差値を除くすべての前記構造化残差値が、対応するしきい値を上回る場合には、識別イベントが発生し、
前記判定された故障センサが前記センサのサブセットであり、設計により、そのサブセットについて、前記識別された構造化残差値に対応する前記構造化残差変換が前記サブセットの故障の存在を感知しない装置。
【請求項20】
請求項1において、前記識別ユニットが、前記構造化残差値に変換操作を適用して、変換された構造化残差インデックスを生成し、
前記識別ユニットが、各変換された構造化残差インデックスを対応するしきい値と比較し、
前記変換され識別された構造化残差インデックスと称する1つの構造化残差を除くすべての前記変換された構造化残差インデックスが、対応するしきい値を上回る場合には、識別イベントが発生し、
前記判定された故障センサが前記センサのサブセットであり、設計により、そのサブセットについて、前記変換された構造化残差インデックスに対応する前記構造化残差変換が前記サブセットの故障の存在を感知しない装置。
【請求項21】
請求項20において、前記変換操作が自乗および拡大縮小の操作を含む装置。
【請求項22】
請求項20において、前記変換操作が、指数関数的に重み付けした、時間における移動平均フィルタを適用することを含む装置。
【請求項23】
請求項22において、各変換された構造化残差インデックスについての前記しきい値が、自己相関関数を用いて前記対応する構造化残差しきい値から計算される装置。
【請求項24】
請求項1において、前記識別ユニットが、前記構造化残差値に、前記故障検出イベントの時点から累積する累積操作を適用して、累積された構造化残差インデックスを生成し、
前記識別ユニットが、各累積された構造化残差インデックスを対応するしきい値と比較し、
前記累積され識別された構造化残差インデックスと称する1つの構造化残差を除くすべての前記累積された構造化残差インデックスが、対応するしきい値を上回る場合には、識別イベントが発生し、
前記判定された故障センサが前記センサのサブセットであり、設計により、そのサブセットについて、前記累積され識別された構造化残差インデックスに対応する前記構造化残差変換が前記サブセットの故障の存在を感知しない装置。
【請求項25】
請求項24において、前記累積操作で、前記故障検出イベントの時点からの前記構造化残差の統計的平均における有意変化を検出するよう設計された、一般化公算比インデックスを計算する装置。
【請求項26】
請求項24において、前記累積操作で、前記故障検出イベントの時点からの前記構造化残差の統計的平均を計算し、累積された平均インデックスを生成する装置。
【請求項27】
請求項24において、前記累積操作で、前記故障検出イベントの時点からの構造化残差の統計的分散を計算し、累積された分散インデックスを生成する装置。
【請求項28】
請求項1において、前記識別されたセンサ故障のそれぞれについて推定される故障サイズを、前記等式エラー値への前記識別されたセンサ故障の影響を最小にすることにより計算する装置。
【請求項29】
請求項1において、前記分類ユニットが、識別された各故障センサに対し1つずつ、複数の回帰線を計算し、この各回帰線は前記識別の時点からの前記対応する故障センサについて測定されたセンサ値を用いて計算し、複数のセンサ値回帰線を生成し、
前記分類ユニットが、識別された各故障センサに対し1つずつ、複数の回帰線を計算し、この各回帰線は前記識別の時点からの前記対応する故障センサについて推定される故障サイズを用いて計算し、複数の故障サイズ回帰線を生成し、
前記分類ユニットが、センサ値回帰線ならびに故障サイズ回帰線からの傾き、バイアスおよび残差情報を用いて、前記識別されたセンサ故障を故障タイプの固定セットに分類する装置。
【請求項30】
請求項29において、前記対応するセンサ値回帰線の残差がしきい値を下回り、前記対応するセンサ値回帰線の傾きが統計的にゼロに等しい場合には、故障センサを“完全故障”タイプとして分類する装置。
【請求項31】
請求項29において、前記対応する故障サイズ回帰線の残差がしきい値を下回り、前記対応する故障サイズ回帰線の傾きが統計的にゼロに等しく、前記対応する故障サイズ回帰線のバイアスが統計的にゼロに等しくない場合には、故障センサを “バイアス” タイプとして分類する装置。
【請求項32】
請求項29において、前記対応する故障サイズ回帰線の残差がしきい値を下回り、前記対応する故障サイズ回帰線の傾きが統計的にゼロに等しくない場合には、故障センサを “ドリフト” タイプとして分類する装置。
【請求項33】
請求項29において、前記対応する故障サイズ回帰線の残差がしきい値を上回り、前記対応する故障サイズ回帰線の傾きおよびバイアスがともに統計的にゼロに等しい場合には、故障センサを “精度劣化” タイプとして分類する装置。
【請求項34】
請求項26において、前記識別イベントが、対応するしきい値を上回る累積された分散インデックスにより発生する場合には、故障センサを “精度劣化” タイプとして分類する装置。
【請求項35】
コンピュータを用いて、測定されるプロセスにおける1つまたは複数のセンサ故障を検出する方法であって、
測定されたセンサ値を含む信号の動作ベクトルを受け取り、前記測定されたセンサ値を前処理して、前処理されたセンサ値を生成するステップと、
前記前処理されたセンサ値を、主として測定雑音を含む等式エラー値に変換するステップと、
複数の変換を前記等式エラー値に適用して複数の構造化残差値を生成するステップであって、前記変換が、構造化残差変換と称され、センサのサブセットの故障を感知しないように設計されているステップと、
前記等式エラー値の間の関係を監視し、予測された関係からの前記関係の有意偏差の発生により検出イベントを生成するステップと、
検出イベントが発生した場合に、前記構造化残差値を用いて1つまたは複数のセンサの故障の有無を判定し、その判定により識別イベントを生成するステップと、
識別イベントが発生した場合に、前記識別された故障センサのそれぞれについて故障サイズを推定するステップと、
識別イベントが発生した場合、識別されたすべての故障について、対応する前記測定されたセンサ値から前記推定された故障サイズを差し引くことにより、前記動作信号中の故障の測定されたセンサ値を修正された値に置き換えるステップと、
識別イベントが発生した場合、前記識別されたセンサ故障を故障タイプの固定セットに分類するステップとを備えた方法。
【請求項36】
請求項35において、前記測定されたセンサ値を前処理するステップが、拡大縮小およびオフセットすることにより達成される方法。
【請求項37】
請求項35において、前記動作信号が、前記測定されたセンサ値に関する既知の状態の情報を含む方法。
【請求項38】
請求項35において、前記前処理されたセンサ値を等式エラー値に変換するステップが、前記前処理されたセンサ値に行列を乗じることにより達成される方法。
【請求項39】
請求項38において、前記行列を主要コンポーネント分析の残差部分から算出する方法。
【請求項40】
請求項38において、前記行列を、各センサ値に1つの、1セットの部分最小自乗モデルの残差部分から算出する方法。
【請求項41】
請求項38において、前記行列を、前記測定されるプロセスの質量バランスまたはエネルギーバランスから算出する方法。
【請求項42】
請求項35において、各構造化残差変換が、前記等式エラーへの点乗積として適用される係数のベクトルからなる方法。
【請求項43】
請求項35において、各構造化残差変換が、センサのサブセットの故障を感知せず、サブセット外の他のすべてのセンサの故障を最大限感知するように設計されている方法。
【請求項44】
請求項35において、各構造化残差変換が、単一センサの故障を感知せず、他のすべてのセンサの故障を最大限感知するように設計されている方法。
【請求項45】
請求項35において、各変換を定義する前記センサのサブセットが、既知の不具合状態のすべてのセンサを少なくとも含む方法。
【請求項46】
請求項35において、前記等式エラー値の間の関係を監視するステップが、
前記等式エラーの関数である検出インデックスを計算することと、
前記検出インデックスをしきい値と比較して、予測された関係からの前記関係の有意偏差の発生を検出することとからなる方法。
【請求項47】
請求項46において、前記検出インデックスが、前記等式エラー値の自乗値を加算することにより得られる方法。
【請求項48】
請求項46において、前記等式エラーに行列を乗じ前記等式エラー値の相関性が解除されて、相関性を解除された等式エラー値が生成され、
前記検出インデックスが、前記相関性を解除された等式エラー値を自乗して加算することにより得られる方法。
【請求項49】
請求項47または48において、前記しきい値が統計技法を用いて決定される方法。
【請求項50】
請求項47または48において、前記検出インデックスが少なくとも時間に関してフィルタ処理され、過渡現象および雑音の影響を平滑化して、フィルタ処理された検出インデックスが生成され、
前記フィルタ処理された検出インデックスを前記検出インデックスの代わりに用いて、前記等式エラー値の間の関係を監視し、
前記フィルタ処理された検出インデックスをしきい値と比較して、予測された関係からの前記関係の有意偏差の発生を検出する方法。
【請求項51】
請求項50において、前記検出インデックスが、指数関数的に重み付けされた移動平均フィルタの適用によりフィルタ処理される方法。
【請求項52】
請求項51において、前記フィルタ処理された検出インデックスについての前記しきい値が、自己相関関数を用いて前記検出インデックスしきい値から計算される方法。
【請求項53】
請求項35において、1つまたは複数のセンサの故障の有無を判定するステップが、
各構造化残差値を対応するしきい値と比較することと、
前記識別された構造化残差値と称する1つの構造化残差値を除くすべての前記構造化残差値が、対応するしきい値を上回る場合には、識別イベントを発生することと、
前記故障センサが前記センサのサブセットであると判定することとからなり、そのサブセットについて、設計により、前記識別された構造化残差値に対応する構造化残差変換が前記サブセットの故障の存在を感知しない方法。
【請求項54】
請求項35において、前記構造化残差値に変換操作を適用して、変換された構造化残差インデックスを生成する方法であって、1つまたは複数のセンサの故障の有無を判定するステップが、
各変換された構造化残差インデックスを対応するしきい値と比較することと、
前記変換され識別された構造化残差インデックスと称する構造化残差の1つを除くすべての前記変換された構造化残差インデックスが、対応するしきい値を上回る場合には、識別イベントを発生することと、
前記故障センサが前記センサのサブセットであると判定することとからなり、そのサブセットについて、設計により、前記変換された構造化残差インデックスに対応する構造化残差変換が前記サブセットの故障の存在を感知しない方法。
【請求項55】
請求項54において、前記変換操作が自乗および拡大縮小の操作を含む方法。
【請求項56】
請求項54において、前記変換操作が、指数関数的に重み付けした、時間における移動平均フィルタを適用することを含む方法。
【請求項57】
請求項56において、各変換された構造化残差インデックスについての前記しきい値が、自己相関関数を用いて前記対応する構造化残差しきい値から計算される方法。
【請求項58】
請求項35において、前記構造化残差値に、前記故障検出イベントの時点から累積する累積操作を適用して、累積された構造化残差インデックスを生成する方法であって、1つまたは複数のセンサの故障の有無を判定するステップが、
各累積された各構造化残差インデックスを対応するしきい値と比較することと、
前記累積され識別された構造化残差インデックスと称する1つの構造化残差を除くすべての前記累積された構造化残差インデックスが、対応するしきい値を上回る場合には、識別イベントを発生することと、
前記故障センサが前記センサのサブセットであると判定することとからなり、そのサブセットについて、設計により、前記累積され識別された構造化残差インデックスに対応する前記構造化残差変換が前記サブセットの故障の存在を感知しない方法。
【請求項59】
請求項58において、前記累積操作で、前記故障検出イベントの時点からの前記構造化残差の統計的平均における有意変化を検出するよう設計された、一般化公算比インデックスを計算する方法。
【請求項60】
請求項58において、前記累積操作で、前記故障検出イベントの時点からの前記構造化残差の統計的平均を計算し、累積された平均インデックスを生成する方法。
【請求項61】
請求項58において、前記累積操作で、前記故障検出イベントの時点からの構造化残差の統計的分散を計算し、累積された分散インデックスを生成する方法。
【請求項62】
請求項35において、前記識別されたセンサ故障のそれぞれについて推定される故障サイズを、前記等式エラー値への前記識別されたセンサ故障の影響を最小にすることにより計算する方法。
【請求項63】
請求項35において、前記識別されたセンサ故障を故障タイプの固定セットに分類するステップが、
識別された各故障センサに対し1つずつ、複数の回帰線を計算し、この各回帰線は前記識別の時点からの前記対応する故障センサについて測定されたセンサ値を用いて計算し、複数のセンサ値回帰線を生成することと、
識別された各故障センサに対し1つずつ、複数の回帰線を計算し、この各回帰線は前記識別の時点からの前記対応する故障センサについて推定される故障サイズを用いて計算し、複数の故障サイズ回帰線を生成することと、
センサ値回帰線ならびに故障サイズ回帰線からの傾き、バイアスおよび残差情報を用いて、前記識別されたセンサ故障を故障タイプの固定セットに分類することとにより達成される方法。
【請求項64】
請求項63において、前記対応するセンサ値回帰線の残差がしきい値を下回り、前記対応するセンサ値回帰線の傾きが統計的にゼロに等しい場合には、故障センサを “完全故障” タイプとして分類する方法。
【請求項65】
請求項63において、前記対応する故障サイズ回帰線の残差がしきい値を下回り、前記対応する故障サイズ回帰線の傾きが統計的にゼロに等しく、前記対応する故障サイズ回帰線のバイアスが統計的にゼロに等しくない場合には、故障センサを “バイアス” タイプとして分類する方法。
【請求項66】
請求項63において、前記対応する故障サイズ回帰線の残差がしきい値を下回り、前記対応する故障サイズ回帰線の傾きが統計的にゼロに等しくない場合には、故障センサを “ドリフト” タイプとして分類する方法。
【請求項67】
請求項63において、前記対応する故障サイズ回帰線の残差がしきい値を上回り、前記対応する故障サイズ回帰線の傾きおよびバイアスがともに統計的にゼロに等しい場合には、故障センサを “精度劣化”タイプとして分類する方法。
【請求項68】
請求項60において、前記識別イベントが、対応するしきい値を上回る累積された分散インデックスにより発生する場合には、故障センサを “精度劣化”タイプとして分類する方法。
【図1】

【図2】
【図3A】
【図3B】
【図4】
【図5】
【図6】
【図7A】
【図7B】
【図2】
【図3A】
【図3B】
【図4】
【図5】
【図6】
【図7A】
【図7B】
【公開番号】特開2008−198213(P2008−198213A)
【公開日】平成20年8月28日(2008.8.28)
【国際特許分類】
【出願番号】特願2008−33036(P2008−33036)
【出願日】平成20年2月14日(2008.2.14)
【分割の表示】特願2000−565441(P2000−565441)の分割
【原出願日】平成10年10月27日(1998.10.27)
【出願人】(500204511)アスペン テクノロジー インコーポレイテッド (4)
【Fターム(参考)】
【公開日】平成20年8月28日(2008.8.28)
【国際特許分類】
【出願日】平成20年2月14日(2008.2.14)
【分割の表示】特願2000−565441(P2000−565441)の分割
【原出願日】平成10年10月27日(1998.10.27)
【出願人】(500204511)アスペン テクノロジー インコーポレイテッド (4)
【Fターム(参考)】
[ Back to top ]