
センサを用いた追突事故防止装置
【課題】速度のみが検出可能な非接触式のミリ波センサの出力情報のみで、追突事故を防止するために運転手に警報を与えるシステムを比較的安価に提供する。
【解決手段】複数のミリ波センサにより、同一方向の目標物との相対速度が測定可能な構成となっていて、かつ各々のミリ波センサの検出範囲を異なるものとし、最も遠くから検出できるミリ波センサから順に判定用の速度閾値を小さくなるようにあらかじめ設定し、各々のミリ波センサで計測した速度がそれぞれ設定された閾値以上であるか判定し、閾値以上であった場合には追突する可能性があると判定するように構成した。
【解決手段】複数のミリ波センサにより、同一方向の目標物との相対速度が測定可能な構成となっていて、かつ各々のミリ波センサの検出範囲を異なるものとし、最も遠くから検出できるミリ波センサから順に判定用の速度閾値を小さくなるようにあらかじめ設定し、各々のミリ波センサで計測した速度がそれぞれ設定された閾値以上であるか判定し、閾値以上であった場合には追突する可能性があると判定するように構成した。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ミリ波帯あるいは準ミリ波帯の電磁波を先行車両や追い抜き車両,歩行者,障害物などの計測対象となる対象物に向けて放射し、反射波の周波数変化量を計測して相対速度を検出するミリ波センサを利用した主に自動車向けの追突事故防止装置に関するものである。
【背景技術】
【0002】
近年、自動車の周囲の状況をセンシングし、交通事故発生のリスクを事前に判定して、このリスクを小さくするためのシステムが適用されつつある。このうち、自車前方の車両や障害物を検知し、衝突を予測してシートベルトの巻き取りや非常ブレーキの動作を行うプリクラッシュセーフティ等の制御を行うための車載用レーダシステムが実現されている。車載用レーダシステムとしては、レーザレーダとミリ波レーダが一般的に知られているが、なかでもミリ波レーダは、雨や霧の状態でも安定して対象物を検知することができ、全天候型のセンサとして期待されている。
【0003】
ミリ波レーダは対象物までの距離や方向,相対速度の計測を行うことが可能であり、各種の方式がある。例えば、2つの周波数を切り換える2周波CW(Continuous Wave)方式や、送信周波数に三角変調を施すFMCW方式(Frequency Modulated Continuous Wave)方式などが知られている(例えば、特許文献1,特許文献2を参考)。
【0004】
一方で、ミリ波の連続波を放射して車や障害物,道路などの対象物からの反射波を受信し、周波数変化量を検出して対象物との相対速度を測定する単純な速度センサ(以下、ミリ波センサと呼ぶ)も知られている(例えば、特許文献3を参考)。これは、例えば対地との速度を非接触で測定するセンサとして用いられている。
【0005】
特許文献1や2に開示された技術を用いて、追突事故を防止するシステムを構築する場合、対象物からの距離を検出するために周波数切り換えや変調が必要であるなど、送信回路が複雑となり、また受信波形の解析も複雑となるため処理回路も複雑となり、結果としてコストが高くなる。一方で、特許文献3に開示されたミリ波センサの技術では、計測可能な物理量が相対速度のみである。追突しそうかどうかの判定のためには、対象物との相対速度だけでなく距離の情報が不可欠であるため、このミリ波センサから得られる速度情報のみでは追突事故のリスク判定が難しい。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】WO01/055745号公報
【特許文献2】特開平11−133143号公報
【特許文献3】特開2006−184144号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明の目的は、ミリ波センサを利用し、追突事故を防止するために運転手に警報を与えるシステムを比較的安価に提供することである。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明では、ミリ波帯あるいは準ミリ波帯の電磁波を特定方面に向けて放射し、対象物からの反射波の周波数変化量を計測して対象物の相対速度を検出することが可能な複数のミリ波センサから構成され、かつ各々のミリ波センサの検出範囲を異なるものとし、最も遠くから検出できるミリ波センサから順に判定用の速度閾値を小さくなるようにあらかじめ設定し、各々のミリ波センサで計測した速度がそれぞれ設定された閾値以上であるか判定し、閾値以上であった場合には追突する可能性があると判定するように構成したことを主な特徴とする。
【発明の効果】
【0009】
本発明によれば、追突事故を防止するために運転手に警報を与えるシステムを比較的安価に構築できる。
【図面の簡単な説明】
【0010】
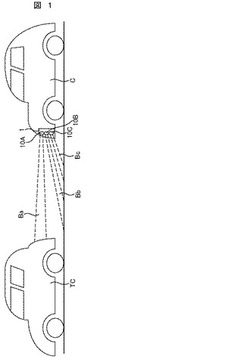
【図1】本発明に係る追突事故防止警報装置における概略構成と検出方法の一例。
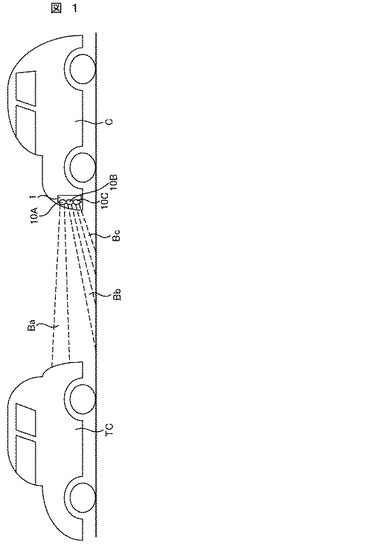
【図2】本発明に係る追突事故防止警報装置に用いるセンサ部の実装の一例。
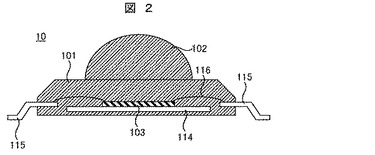
【図3】本発明に係る追突事故防止警報装置に用いるセンサ部の基本回路の一例。
【図4】本発明に係る追突事故防止警報装置におけるブロック図の一例。
【図5】本発明に係る追突事故防止警報装置における判定フローチャートの一例。
【図6】本発明に係る追突事故防止警報装置に用いるセンサ部における実装の別の一例。
【図7】本発明に係る追突事故防止警報装置に用いるセンサ部における実装の別の一例。
【図8】本発明に係る追突事故防止警報装置における概略構成と検出方法の別の一例。
【図9】本発明に係る追突事故防止警報装置における概略構成と検出方法の別の一例。
【図10】本発明に係る追突事故防止警報装置におけるブロック図の別の一例。
【図11】本発明に係る追突事故防止警報装置における概略構成と検出方法の別の一例。
【図12】本発明に係る追突事故防止警報装置における判定フローチャートの一例。
【発明を実施するための形態】
【0011】
以下、図1から図5を用いて、追突事故防止警報装置の構成について説明する。
【0012】
図1は、本発明に係る追突事故防止警報装置の概略構成と検出方法の一例を示す図である。自車Cには追突事故防止警報装置1が自車Cの前方に配置される。追突事故防止警報装置1には、速度検出の対象となる先行車両TCとの相対速度を検出するミリ波センサ10A,10B,10Cが搭載されている。なお、本発明における追突事故防止警報装置において、ミリ波センサの数量は図1に示すような3個に限定されるものではない。このミリ波センサ10A,10B,10Cは、10GHz以上のミリ波帯あるいは準ミリ波帯の連続波を特定方面に向けて放射し、その特定方面に放射された連続波を反射する先行車両TCが存在すれば、その反射波の周波数変化(ドップラーシフト)を検出して、自車Cと先行車両TCとの相対速度を測定するセンサである。それぞれのミリ波センサ10A,10B,10Cにおける先行車両TCの相対速度が検出可能な範囲は、ビーム範囲Ba,Bb,Bcで示されている。ビームの照射方向を垂直面内で変えることにより、検出可能な範囲はミリ波センサ10Aが最も遠く、ミリ波センサ10Cが最も短くなっている。図1の例ではミリ波センサ10Aのみが、先行車両TCからの反射波がミリ波センサ10Aに戻り、速度計測が可能な状況を示している。
【0013】
図2にミリ波センサ10の断面図の一例を示す。本実施例では、ミリ波帯の連続波の送信と受信は、同一の半導体基板上に形成された1チップのMMIC(Monolithic Microwave Integrated Circuit)103で行っている。このMMIC103は樹脂パッケージ101内に実装されている。MMIC103とミリ波センサ10外の回路との接続は、MMIC103の電極パッドとミリ波センサ10の外周に固定された接続ピン115を介してワイヤ116で接続される。
【0014】
本実施例では、MMIC103表面上に送受信兼用のマイクロストリップパッチアンテナによる平面アンテナがあり、その上部の樹脂パッケージ101上に、樹脂パッケージ101と別に用意された誘電体レンズ102を装着している。アンテナ素子を1個とし、ミリ波を集束することによって、チップ面積の縮小、即ち、コストの低減を行っている。
【0015】
図3は、本実施例におけるMMIC103に形成される回路の等価回路図の一例を示している。本実施例では、送信信号を生成するための発振器と混合器に入力する局部信号発生器に異なる周波数の発振器を用いる。発振器134で生成された高周波信号は増幅器110で増幅された後、アイソレータ119を介してアンテナ139からミリ波となって放射される。ここで速度検出の対象となる先行車両TCがあると、ミリ波は反射する。この反射したミリ波は自車Cと先行車両TCとの相対速度によりドップラーシフトしてアンテナ139に入射する。アンテナ139により受信された信号は、アイソレータ119を介して、低雑音増幅器113により増幅され、混合器112で局部信号発生器135と混合されて、IF信号が生成される。
【0016】
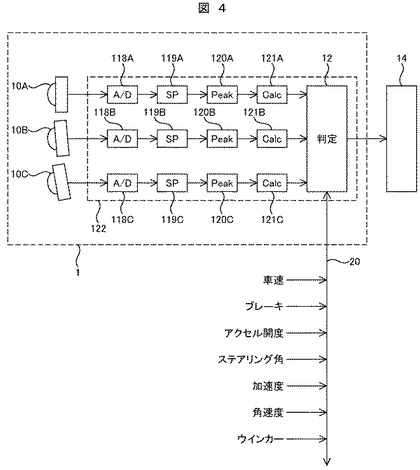
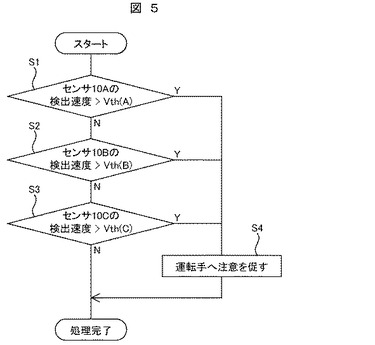
図4は、本実施例における信号処理の流れと、それを構成する各機能ブロックの一例を示している。ミリ波センサ10A,10B,10Cからそれぞれ出力されたアナログ信号は、信号処理装置122内のA/Dコンバータ118A,118B,118Cに入力される。A/Dコンバータ118A,118B,118Cにおいて、変換されたディジタル信号は信号処理119A,119B,119Cに入力され、デジタルフィルタリング処理やFFT(Fast Fourier Transform:高速フーリエ変換)などの信号処理を行い時間領域の信号から周波数領域の信号に変換した後、ピーク検出処理120A,120B,120Cにおいて信号スペクトルの中から先行車両TCからの反射信号に相当する信号スペクトルを検出する。先行車両TCが検出された場合、検出された信号から、計算処理121A,121B,121Cにおいて、先行車両TCと自車Cとの相対速度を計算する。得られた相対速度は判定処理12へ入力される。判定処理12では、各々のミリ波センサ10A,10B,10Cにより得られた相対速度情報から、基本的には図5に示すフローチャートにより追突する危険性があるか判定する。まず始めに、ステップS1において、ミリ波センサ10Aで検出された相対速度VAが閾値Vth(A)よりも大きいか判定する。大きいと判定された場合、ステップS4に移行し、判定処理12から伝達手段14に信号を送信し、伝達手段14により運転手に注意を促す。大きくないと判定された場合、ステップS2に移行し、ステップS1と同様に、ミリ波センサ10Bで検出された相対速度VBが閾値Vth(B)よりも大きいか判定する。なお、閾値Vth(B)はVth(A)よりも小さく設定する。ステップS2で大きいと判定された場合、ステップS4に移行して運転手に注意を促し、そうでない場合はステップS3に移行する。ステップS3に移行した場合、ステップS1と同様に、ミリ波センサ10Cで検出された相対速度VCが閾値Vth(C)よりも大きいか判定する。なお、閾値Vth(C)はVth(B)よりも小さく設定する。ステップS3で大きいと判定された場合、ステップS4に移行し、そうでない場合は処理を終了する。なお、必要に応じて、信号線20を介し車輪速センサから得られる速度,ブレーキの踏み具合,アクセル開度,ステアリング角,加速度センサにより得られる加速度,角速度センサにより得られる角速度,ウインカーの稼動状況など、自車Cから得られる情報を加味して総合的に判定し、追突する可能性があるか判定してもよい。また、各々のミリ波センサ10A,10B,10Cの先行車両TCの検出からの時間経過と計測された相対速度の推移から、先行車両TCと自車Cの距離を推定し、追突する可能性があるか判定しても良い。この場合、ミリ波センサが1つでも距離の推定が可能となる。
【0017】
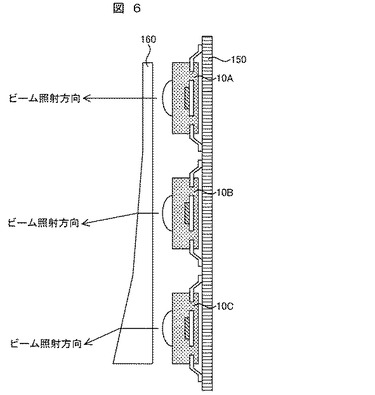
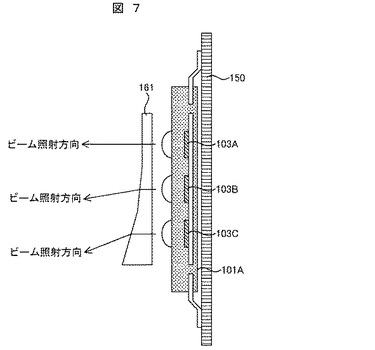
なお、図4では各ミリ波センサ10A,10B,10Cの方向を変えて配置してあるが、他の例として、図6に示すように各々のミリ波センサ10A,10B,10Cを1枚の基板150上に配置し、プリズム形状の誘電体部材160を各ミリ波センサ10A,10B,10Cの前方に配置してミリ波のビーム方向を曲げる手段をとっても良い。また、図7に示すように複数のMMIC103A〜Cを1つの樹脂パッケージ101Aに配置し、プリズム形状の誘電体部材161を樹脂パッケージ101Aの前方に配置して、ミリ波のビーム方向を曲げる手段をとっても良い。
【0018】
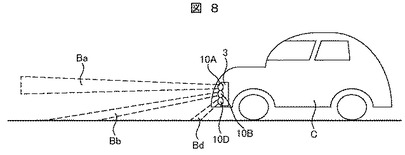
さらには、例えば図8に示す追突事故防止警報装置3のようにミリ波センサ10Dのビーム方向と道路となす角を大きくすると、ミリ波センサ10Dから放射したミリ波は道路から反射して再びミリ波センサ10Dに戻ってくるようになる。この場合、対地との速度を検知できるだけでなく、前方車両との速度差があって近づいている場合には、速度と同時に相対速度も計測可能であり、追突する可能性があるか判定することが可能である。
【0019】
以上の方法により、ミリ波レーダと比較して距離測定精度は劣るものの、運転手に追突の可能性が高い場合に注意を与えるのに十分な自動車の追突事故防止警報装置を安価に実現できる。
【0020】
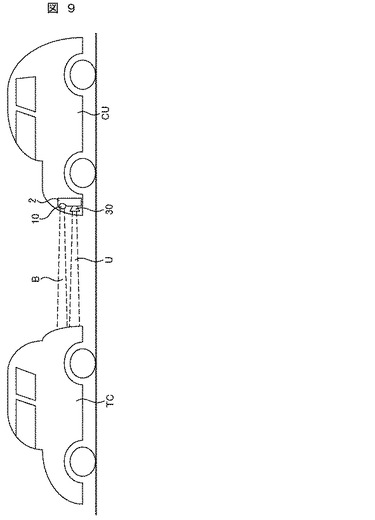
次に図9と図10を用いて、本発明に係る追突事故防止警報装置における構成と検出方法の別の一例を示す。この追突事故防止警報装置2は図1と同様のミリ波センサ10を1個に、超音波式の距離センサ30を追加した構成となっている。ミリ波センサ10は図1と同様にビーム範囲Bに先行車両TCが存在すれば、その相対速度を検出する。また、距離センサ30はパルス上の超音波をビーム範囲Uに放射しその範囲内に放射された超音波を反射する先行車両TCが存在すれば、先行車両TCから反射して戻ってくるまでの伝搬時間を計測し、距離に換算する。なお、ビーム範囲Bとビーム範囲Uは同じ方向であり、また、ほぼ同じ検出距離となっている。また、同じ距離でも超音波の伝搬時間は空気温度,風,自車CUや先行車両TCの速度により変わり誤差となる。ただし、空気温度は図示しないサーミスタなどにより、自車CUの速度は自車CUの図示しない車輪速センサなどにより、先行車両TCと自車CUの相対速度はミリ波センサ10によりそれぞれ計測可能であるので、それぞれの要因による距離計測の補正は可能である。
【0021】
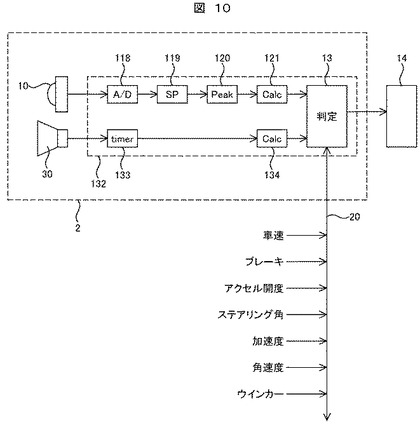
図10は、本実施例における信号処理の流れと、それを構成する各機能ブロックとを示している。ミリ波センサ10から出力されたアナログ信号は、図4と同様に処理され、判定処理13へ入力される。距離センサ30からは超音波パルスの送信タイミングと受信タイミングが出力され、タイマ133により時間差を求め、計算処理134により距離に換算され判定処理13へ入力される。判定処理13では、先行車両TCとの相対速度と距離、また、必要に応じて、信号線20を介して得られる車両情報を加味して、追突する可能性があるか判定する。
【0022】
以上の方法により、本実施例においても、運転手に追突の可能性が高い場合に注意を与えるのに十分な自動車の追突事故防止警報装置を安価に実現できる。
【0023】
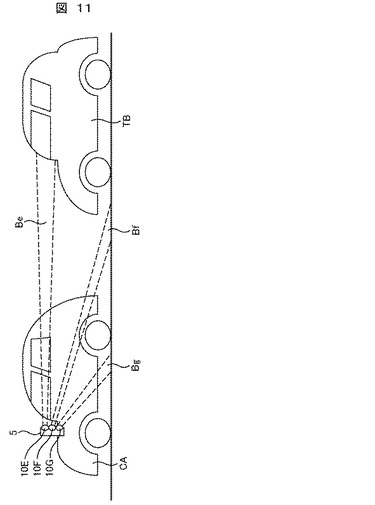
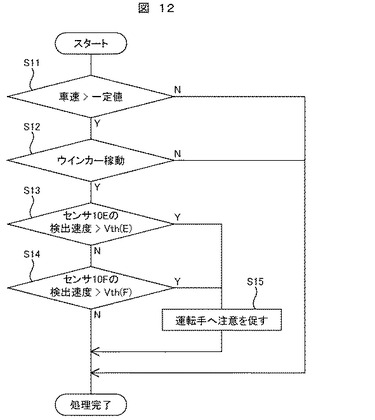
次に、図11と図12を用いて、本発明に係る追突事故防止警報装置における構成の別の一例を示す。この追突事故防止警報装置5は主に自車CAの隣接車線から追い抜く車両、または後方から近づいてくる車両を検知する場合に用いる。隣接車線から追い抜く車両を検知する場合を例にとって説明する。追突事故防止警報装置5は、例えばドアミラーに内蔵され、速度検出の対象となる車両TBとの相対速度を検出するミリ波センサ10E,10F、ならびに、自車Cの速度を測定するミリ波センサ10Gが搭載されている。ミリ波センサ10E,10Fのミリ波のビーム範囲はそれぞれ後方Be,後下方Bfにあり、後方の隣接車線から近づいてくる車両TBを検出する。また、自車Cの速度を検知するミリ波センサ10Gのミリ波のビーム範囲はBgである。本実施例においては、例えば図12に示すフローチャートにより、自車CAが車線変更すると後方から近づく追い抜き車両に追突される危険性があるかどうか判定する。まず、始めにステップS11においてミリ波センサ10Gにより測定された自車CAの速度が一定値以上であるか判定する。一定値以下の場合は車線変更か交差点での右左折か判別が難しいため判定を行わずに終了する。次にステップS12においてウインカーの稼動状態を判定する。一定値速度以上でウインカーが稼動すれば車線変更と判断できる。次にステップS13において、ミリ波センサ10Eで検出された相対速度VEが閾値Vth(E)よりも大きいか判定する。大きいと判定された場合、ステップS15に移行し、判定処理13から伝達手段14に信号を送信し、伝達手段14により運転手へ車線変更しないように注意を促す。大きくないと判定された場合、ステップS14に移行し、ステップS13と同様に、ミリ波センサ10Fで検出された相対速度VFが閾値Vth(F)よりも大きいか判定する。なお、閾値Vth(F)はVth(E)よりも小さく設定する。ステップS14で大きいと判定された場合、ステップS15に移行し、そうでない場合は処理を終了する。
【0024】
以上の方法により、本実施例においても、運転手に追突の可能性が高い場合に注意を与えるのに十分な自動車の追突事故防止警報装置を安価に実現できる。
【符号の説明】
【0025】
1,2,3,5 追突事故防止警報装置
10 ミリ波センサ
【技術分野】
【0001】
本発明は、ミリ波帯あるいは準ミリ波帯の電磁波を先行車両や追い抜き車両,歩行者,障害物などの計測対象となる対象物に向けて放射し、反射波の周波数変化量を計測して相対速度を検出するミリ波センサを利用した主に自動車向けの追突事故防止装置に関するものである。
【背景技術】
【0002】
近年、自動車の周囲の状況をセンシングし、交通事故発生のリスクを事前に判定して、このリスクを小さくするためのシステムが適用されつつある。このうち、自車前方の車両や障害物を検知し、衝突を予測してシートベルトの巻き取りや非常ブレーキの動作を行うプリクラッシュセーフティ等の制御を行うための車載用レーダシステムが実現されている。車載用レーダシステムとしては、レーザレーダとミリ波レーダが一般的に知られているが、なかでもミリ波レーダは、雨や霧の状態でも安定して対象物を検知することができ、全天候型のセンサとして期待されている。
【0003】
ミリ波レーダは対象物までの距離や方向,相対速度の計測を行うことが可能であり、各種の方式がある。例えば、2つの周波数を切り換える2周波CW(Continuous Wave)方式や、送信周波数に三角変調を施すFMCW方式(Frequency Modulated Continuous Wave)方式などが知られている(例えば、特許文献1,特許文献2を参考)。
【0004】
一方で、ミリ波の連続波を放射して車や障害物,道路などの対象物からの反射波を受信し、周波数変化量を検出して対象物との相対速度を測定する単純な速度センサ(以下、ミリ波センサと呼ぶ)も知られている(例えば、特許文献3を参考)。これは、例えば対地との速度を非接触で測定するセンサとして用いられている。
【0005】
特許文献1や2に開示された技術を用いて、追突事故を防止するシステムを構築する場合、対象物からの距離を検出するために周波数切り換えや変調が必要であるなど、送信回路が複雑となり、また受信波形の解析も複雑となるため処理回路も複雑となり、結果としてコストが高くなる。一方で、特許文献3に開示されたミリ波センサの技術では、計測可能な物理量が相対速度のみである。追突しそうかどうかの判定のためには、対象物との相対速度だけでなく距離の情報が不可欠であるため、このミリ波センサから得られる速度情報のみでは追突事故のリスク判定が難しい。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】WO01/055745号公報
【特許文献2】特開平11−133143号公報
【特許文献3】特開2006−184144号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明の目的は、ミリ波センサを利用し、追突事故を防止するために運転手に警報を与えるシステムを比較的安価に提供することである。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明では、ミリ波帯あるいは準ミリ波帯の電磁波を特定方面に向けて放射し、対象物からの反射波の周波数変化量を計測して対象物の相対速度を検出することが可能な複数のミリ波センサから構成され、かつ各々のミリ波センサの検出範囲を異なるものとし、最も遠くから検出できるミリ波センサから順に判定用の速度閾値を小さくなるようにあらかじめ設定し、各々のミリ波センサで計測した速度がそれぞれ設定された閾値以上であるか判定し、閾値以上であった場合には追突する可能性があると判定するように構成したことを主な特徴とする。
【発明の効果】
【0009】
本発明によれば、追突事故を防止するために運転手に警報を与えるシステムを比較的安価に構築できる。
【図面の簡単な説明】
【0010】
【図1】本発明に係る追突事故防止警報装置における概略構成と検出方法の一例。
【図2】本発明に係る追突事故防止警報装置に用いるセンサ部の実装の一例。
【図3】本発明に係る追突事故防止警報装置に用いるセンサ部の基本回路の一例。
【図4】本発明に係る追突事故防止警報装置におけるブロック図の一例。
【図5】本発明に係る追突事故防止警報装置における判定フローチャートの一例。
【図6】本発明に係る追突事故防止警報装置に用いるセンサ部における実装の別の一例。
【図7】本発明に係る追突事故防止警報装置に用いるセンサ部における実装の別の一例。
【図8】本発明に係る追突事故防止警報装置における概略構成と検出方法の別の一例。
【図9】本発明に係る追突事故防止警報装置における概略構成と検出方法の別の一例。
【図10】本発明に係る追突事故防止警報装置におけるブロック図の別の一例。
【図11】本発明に係る追突事故防止警報装置における概略構成と検出方法の別の一例。
【図12】本発明に係る追突事故防止警報装置における判定フローチャートの一例。
【発明を実施するための形態】
【0011】
以下、図1から図5を用いて、追突事故防止警報装置の構成について説明する。
【0012】
図1は、本発明に係る追突事故防止警報装置の概略構成と検出方法の一例を示す図である。自車Cには追突事故防止警報装置1が自車Cの前方に配置される。追突事故防止警報装置1には、速度検出の対象となる先行車両TCとの相対速度を検出するミリ波センサ10A,10B,10Cが搭載されている。なお、本発明における追突事故防止警報装置において、ミリ波センサの数量は図1に示すような3個に限定されるものではない。このミリ波センサ10A,10B,10Cは、10GHz以上のミリ波帯あるいは準ミリ波帯の連続波を特定方面に向けて放射し、その特定方面に放射された連続波を反射する先行車両TCが存在すれば、その反射波の周波数変化(ドップラーシフト)を検出して、自車Cと先行車両TCとの相対速度を測定するセンサである。それぞれのミリ波センサ10A,10B,10Cにおける先行車両TCの相対速度が検出可能な範囲は、ビーム範囲Ba,Bb,Bcで示されている。ビームの照射方向を垂直面内で変えることにより、検出可能な範囲はミリ波センサ10Aが最も遠く、ミリ波センサ10Cが最も短くなっている。図1の例ではミリ波センサ10Aのみが、先行車両TCからの反射波がミリ波センサ10Aに戻り、速度計測が可能な状況を示している。
【0013】
図2にミリ波センサ10の断面図の一例を示す。本実施例では、ミリ波帯の連続波の送信と受信は、同一の半導体基板上に形成された1チップのMMIC(Monolithic Microwave Integrated Circuit)103で行っている。このMMIC103は樹脂パッケージ101内に実装されている。MMIC103とミリ波センサ10外の回路との接続は、MMIC103の電極パッドとミリ波センサ10の外周に固定された接続ピン115を介してワイヤ116で接続される。
【0014】
本実施例では、MMIC103表面上に送受信兼用のマイクロストリップパッチアンテナによる平面アンテナがあり、その上部の樹脂パッケージ101上に、樹脂パッケージ101と別に用意された誘電体レンズ102を装着している。アンテナ素子を1個とし、ミリ波を集束することによって、チップ面積の縮小、即ち、コストの低減を行っている。
【0015】
図3は、本実施例におけるMMIC103に形成される回路の等価回路図の一例を示している。本実施例では、送信信号を生成するための発振器と混合器に入力する局部信号発生器に異なる周波数の発振器を用いる。発振器134で生成された高周波信号は増幅器110で増幅された後、アイソレータ119を介してアンテナ139からミリ波となって放射される。ここで速度検出の対象となる先行車両TCがあると、ミリ波は反射する。この反射したミリ波は自車Cと先行車両TCとの相対速度によりドップラーシフトしてアンテナ139に入射する。アンテナ139により受信された信号は、アイソレータ119を介して、低雑音増幅器113により増幅され、混合器112で局部信号発生器135と混合されて、IF信号が生成される。
【0016】
図4は、本実施例における信号処理の流れと、それを構成する各機能ブロックの一例を示している。ミリ波センサ10A,10B,10Cからそれぞれ出力されたアナログ信号は、信号処理装置122内のA/Dコンバータ118A,118B,118Cに入力される。A/Dコンバータ118A,118B,118Cにおいて、変換されたディジタル信号は信号処理119A,119B,119Cに入力され、デジタルフィルタリング処理やFFT(Fast Fourier Transform:高速フーリエ変換)などの信号処理を行い時間領域の信号から周波数領域の信号に変換した後、ピーク検出処理120A,120B,120Cにおいて信号スペクトルの中から先行車両TCからの反射信号に相当する信号スペクトルを検出する。先行車両TCが検出された場合、検出された信号から、計算処理121A,121B,121Cにおいて、先行車両TCと自車Cとの相対速度を計算する。得られた相対速度は判定処理12へ入力される。判定処理12では、各々のミリ波センサ10A,10B,10Cにより得られた相対速度情報から、基本的には図5に示すフローチャートにより追突する危険性があるか判定する。まず始めに、ステップS1において、ミリ波センサ10Aで検出された相対速度VAが閾値Vth(A)よりも大きいか判定する。大きいと判定された場合、ステップS4に移行し、判定処理12から伝達手段14に信号を送信し、伝達手段14により運転手に注意を促す。大きくないと判定された場合、ステップS2に移行し、ステップS1と同様に、ミリ波センサ10Bで検出された相対速度VBが閾値Vth(B)よりも大きいか判定する。なお、閾値Vth(B)はVth(A)よりも小さく設定する。ステップS2で大きいと判定された場合、ステップS4に移行して運転手に注意を促し、そうでない場合はステップS3に移行する。ステップS3に移行した場合、ステップS1と同様に、ミリ波センサ10Cで検出された相対速度VCが閾値Vth(C)よりも大きいか判定する。なお、閾値Vth(C)はVth(B)よりも小さく設定する。ステップS3で大きいと判定された場合、ステップS4に移行し、そうでない場合は処理を終了する。なお、必要に応じて、信号線20を介し車輪速センサから得られる速度,ブレーキの踏み具合,アクセル開度,ステアリング角,加速度センサにより得られる加速度,角速度センサにより得られる角速度,ウインカーの稼動状況など、自車Cから得られる情報を加味して総合的に判定し、追突する可能性があるか判定してもよい。また、各々のミリ波センサ10A,10B,10Cの先行車両TCの検出からの時間経過と計測された相対速度の推移から、先行車両TCと自車Cの距離を推定し、追突する可能性があるか判定しても良い。この場合、ミリ波センサが1つでも距離の推定が可能となる。
【0017】
なお、図4では各ミリ波センサ10A,10B,10Cの方向を変えて配置してあるが、他の例として、図6に示すように各々のミリ波センサ10A,10B,10Cを1枚の基板150上に配置し、プリズム形状の誘電体部材160を各ミリ波センサ10A,10B,10Cの前方に配置してミリ波のビーム方向を曲げる手段をとっても良い。また、図7に示すように複数のMMIC103A〜Cを1つの樹脂パッケージ101Aに配置し、プリズム形状の誘電体部材161を樹脂パッケージ101Aの前方に配置して、ミリ波のビーム方向を曲げる手段をとっても良い。
【0018】
さらには、例えば図8に示す追突事故防止警報装置3のようにミリ波センサ10Dのビーム方向と道路となす角を大きくすると、ミリ波センサ10Dから放射したミリ波は道路から反射して再びミリ波センサ10Dに戻ってくるようになる。この場合、対地との速度を検知できるだけでなく、前方車両との速度差があって近づいている場合には、速度と同時に相対速度も計測可能であり、追突する可能性があるか判定することが可能である。
【0019】
以上の方法により、ミリ波レーダと比較して距離測定精度は劣るものの、運転手に追突の可能性が高い場合に注意を与えるのに十分な自動車の追突事故防止警報装置を安価に実現できる。
【0020】
次に図9と図10を用いて、本発明に係る追突事故防止警報装置における構成と検出方法の別の一例を示す。この追突事故防止警報装置2は図1と同様のミリ波センサ10を1個に、超音波式の距離センサ30を追加した構成となっている。ミリ波センサ10は図1と同様にビーム範囲Bに先行車両TCが存在すれば、その相対速度を検出する。また、距離センサ30はパルス上の超音波をビーム範囲Uに放射しその範囲内に放射された超音波を反射する先行車両TCが存在すれば、先行車両TCから反射して戻ってくるまでの伝搬時間を計測し、距離に換算する。なお、ビーム範囲Bとビーム範囲Uは同じ方向であり、また、ほぼ同じ検出距離となっている。また、同じ距離でも超音波の伝搬時間は空気温度,風,自車CUや先行車両TCの速度により変わり誤差となる。ただし、空気温度は図示しないサーミスタなどにより、自車CUの速度は自車CUの図示しない車輪速センサなどにより、先行車両TCと自車CUの相対速度はミリ波センサ10によりそれぞれ計測可能であるので、それぞれの要因による距離計測の補正は可能である。
【0021】
図10は、本実施例における信号処理の流れと、それを構成する各機能ブロックとを示している。ミリ波センサ10から出力されたアナログ信号は、図4と同様に処理され、判定処理13へ入力される。距離センサ30からは超音波パルスの送信タイミングと受信タイミングが出力され、タイマ133により時間差を求め、計算処理134により距離に換算され判定処理13へ入力される。判定処理13では、先行車両TCとの相対速度と距離、また、必要に応じて、信号線20を介して得られる車両情報を加味して、追突する可能性があるか判定する。
【0022】
以上の方法により、本実施例においても、運転手に追突の可能性が高い場合に注意を与えるのに十分な自動車の追突事故防止警報装置を安価に実現できる。
【0023】
次に、図11と図12を用いて、本発明に係る追突事故防止警報装置における構成の別の一例を示す。この追突事故防止警報装置5は主に自車CAの隣接車線から追い抜く車両、または後方から近づいてくる車両を検知する場合に用いる。隣接車線から追い抜く車両を検知する場合を例にとって説明する。追突事故防止警報装置5は、例えばドアミラーに内蔵され、速度検出の対象となる車両TBとの相対速度を検出するミリ波センサ10E,10F、ならびに、自車Cの速度を測定するミリ波センサ10Gが搭載されている。ミリ波センサ10E,10Fのミリ波のビーム範囲はそれぞれ後方Be,後下方Bfにあり、後方の隣接車線から近づいてくる車両TBを検出する。また、自車Cの速度を検知するミリ波センサ10Gのミリ波のビーム範囲はBgである。本実施例においては、例えば図12に示すフローチャートにより、自車CAが車線変更すると後方から近づく追い抜き車両に追突される危険性があるかどうか判定する。まず、始めにステップS11においてミリ波センサ10Gにより測定された自車CAの速度が一定値以上であるか判定する。一定値以下の場合は車線変更か交差点での右左折か判別が難しいため判定を行わずに終了する。次にステップS12においてウインカーの稼動状態を判定する。一定値速度以上でウインカーが稼動すれば車線変更と判断できる。次にステップS13において、ミリ波センサ10Eで検出された相対速度VEが閾値Vth(E)よりも大きいか判定する。大きいと判定された場合、ステップS15に移行し、判定処理13から伝達手段14に信号を送信し、伝達手段14により運転手へ車線変更しないように注意を促す。大きくないと判定された場合、ステップS14に移行し、ステップS13と同様に、ミリ波センサ10Fで検出された相対速度VFが閾値Vth(F)よりも大きいか判定する。なお、閾値Vth(F)はVth(E)よりも小さく設定する。ステップS14で大きいと判定された場合、ステップS15に移行し、そうでない場合は処理を終了する。
【0024】
以上の方法により、本実施例においても、運転手に追突の可能性が高い場合に注意を与えるのに十分な自動車の追突事故防止警報装置を安価に実現できる。
【符号の説明】
【0025】
1,2,3,5 追突事故防止警報装置
10 ミリ波センサ
【特許請求の範囲】
【請求項1】
ミリ波帯あるいは準ミリ波帯の電磁波を特定方面に向けて放射し、対象物からの反射波の周波数変化量を計測して前記対象物の相対速度を検出することが可能な複数のミリ波センサから構成され、
前記ミリ波センサの前記対象物の検出可能範囲を各々異なるものとし、
最も遠くから検出できる前記ミリ波センサから順に判定用の速度閾値を小さくなるようにあらかじめ設定し、
各々の前記ミリ波センサで計測した速度がそれぞれ設定された閾値以上であるか判定し、閾値以上であった場合には追突する危険があると判定するように構成したことを特徴とするセンサを用いた追突事故防止装置。
【請求項2】
請求項1において、
前記複数のミリ波センサのビーム方向を各々変えることにより、
各々の前記ミリ波センサによる前記対象物の検出範囲を変更していることを特徴とするセンサを用いた追突事故防止装置。
【請求項3】
請求項1において、
前記複数のミリ波センサのうちひとつを対地との速度測定に用いるように構成したことを特徴とするセンサを用いた追突事故防止装置。
【請求項4】
ミリ波帯あるいは準ミリ波帯の電磁波を特定方面に向けて放射し、対象物からの反射波の周波数変化量を計測して前記対象物の相対速度を検出することが可能なミリ波センサと、
超音波を前記特定方面に向けて放射し前記対象物からの反射波の伝播時間を計測して前記対象物との距離を検出する距離センサとを用い、
前記測定された速度と距離の関係から追突の可能性の判定を行うように構成したことを特徴とするセンサを用いた追突事故防止装置。
【請求項1】
ミリ波帯あるいは準ミリ波帯の電磁波を特定方面に向けて放射し、対象物からの反射波の周波数変化量を計測して前記対象物の相対速度を検出することが可能な複数のミリ波センサから構成され、
前記ミリ波センサの前記対象物の検出可能範囲を各々異なるものとし、
最も遠くから検出できる前記ミリ波センサから順に判定用の速度閾値を小さくなるようにあらかじめ設定し、
各々の前記ミリ波センサで計測した速度がそれぞれ設定された閾値以上であるか判定し、閾値以上であった場合には追突する危険があると判定するように構成したことを特徴とするセンサを用いた追突事故防止装置。
【請求項2】
請求項1において、
前記複数のミリ波センサのビーム方向を各々変えることにより、
各々の前記ミリ波センサによる前記対象物の検出範囲を変更していることを特徴とするセンサを用いた追突事故防止装置。
【請求項3】
請求項1において、
前記複数のミリ波センサのうちひとつを対地との速度測定に用いるように構成したことを特徴とするセンサを用いた追突事故防止装置。
【請求項4】
ミリ波帯あるいは準ミリ波帯の電磁波を特定方面に向けて放射し、対象物からの反射波の周波数変化量を計測して前記対象物の相対速度を検出することが可能なミリ波センサと、
超音波を前記特定方面に向けて放射し前記対象物からの反射波の伝播時間を計測して前記対象物との距離を検出する距離センサとを用い、
前記測定された速度と距離の関係から追突の可能性の判定を行うように構成したことを特徴とするセンサを用いた追突事故防止装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2012−21893(P2012−21893A)
【公開日】平成24年2月2日(2012.2.2)
【国際特許分類】
【出願番号】特願2010−160197(P2010−160197)
【出願日】平成22年7月15日(2010.7.15)
【出願人】(509186579)日立オートモティブシステムズ株式会社 (2,205)
【Fターム(参考)】
【公開日】平成24年2月2日(2012.2.2)
【国際特許分類】
【出願日】平成22年7月15日(2010.7.15)
【出願人】(509186579)日立オートモティブシステムズ株式会社 (2,205)
【Fターム(参考)】
[ Back to top ]