
センサモジュール、組織処理装置、及び組織処理装置の操作方法
【課題】簡単な方法で安全かつ信頼性の高い組織処理装置の操作を行うことを保証するセンサモジュール、それを有する組織処理装置及びその組織処理装置の操作方法を提供する。
【解決手段】センサモジュール38、40、42は、組織処理装置20の各容器30、32、34の温度を測定するための温度センサと、該容器30、32、34の作業位置を検知するための位置センサを含む。提供される組織処理装置の操作方法では、容器が組織処理装置のあるステーションに配置(挿入)され、その容器がステーション内の作業位置にあるかどうかをチェックし、同時にその温度が測定される。
【解決手段】センサモジュール38、40、42は、組織処理装置20の各容器30、32、34の温度を測定するための温度センサと、該容器30、32、34の作業位置を検知するための位置センサを含む。提供される組織処理装置の操作方法では、容器が組織処理装置のあるステーションに配置(挿入)され、その容器がステーション内の作業位置にあるかどうかをチェックし、同時にその温度が測定される。
【発明の詳細な説明】
【技術分野】
【0001】
本願は、2010年6月30日出願に係るドイツ特許出願第102010017667.2号の優先権を主張するものであり、その全記載事項は本書に引用をもって組込み記載されているものとする。
本発明は、組織処理装置のセンサモジュールに関する。このセンサモジュールは、組織処理装置の容器の温度を測定するための温度センサを含む。本発明はまた、処理媒体を収容する容器及びその容器の温度を測定するセンサモジュールを有する組織処理装置に関する。さらに、本発明は組織処理装置の操作方法に関する。
【背景技術】
【0002】
試料、特に組織試料を顕微鏡を用いて検査するため、しばしばそのための組織試料を調製する必要がある。特に顕微鏡で検査できるようにするため、試料は非常に薄い切片に切断する必要がある。組織試料の薄片化は通常ミクロトームを用いて行われる。組織試料を正確に薄片化するため、試料はまず処理工程に供される。例えば、試料はパラフィンブロックに包埋されうる。試料の包埋化は、一般的に知られた組織処理装置を用いて行われるが、その組織処理装置は処理媒体を含む複数の容器を有している。処理を行うには、試料を容器内に入れるか、又は試料を試料処理用のレトルトに入れて、その中に処理媒体を容器からポンプで送り込む。
【0003】
処理媒体を扱う場合、そのプロセスパラメータを所定の範囲に保つことが要求される。例えば、パラフィンを処理媒体として用いる場合、パラフィンを所定の好ましい温度から±2Kの精度で保たなければならない。その理由は、第1にパラフィンを液状に保つため、そして第2に、パラフィンに含まれる添加物が加熱のしすぎによって壊れないようにするためである。処理媒体の温度を測定するために、1以上の処理媒体を含む容器の温度を測定する温度センサを取り付けることが知られている。加熱装置を用いて処理媒体の温度は所定の好ましい温度、あるいは異なるいろいろな目標値にコントロールすることができる。
【発明の概要】
【発明が解決しようとする課題】
【0004】
組織処理装置を操作する間、容器は作業位置に配置され、処理媒体がその容器にポンプで入れられたり、取り出されたりする。もしも組織処理装置の操作時に容器のいずれかが、組織処理装置内に配置されていないことや、あるいは作業位置に完全には配置されていないことで所定の作業位置にない場合、処理媒体が接続部や配管、及び/又は組織処理装置からリークし、組織処理装置やその周囲の環境を汚染し、及び/又は組織処理装置の正常な機能を害することとなる。さらに、熱い、あるいは有害な処理媒体がリークすることで、操作員の負傷の原因ともなる。
【0005】
本発明の課題は、簡単な方法で安全かつ信頼性の高い組織処理装置の操作を行うことを保証するセンサモジュール、それを有する組織処理装置及びその組織処理装置の操作方法を提供することである。
【課題を解決するための手段】
【0006】
この課題は、各独立項(下記の第1〜第3の各視点に対応)の特徴によって達成される。有利な実施形態は従属項(下記の実施形態に対応)に述べたとおりである。なお、特許請求の範囲に付記した図面参照符号は、専ら理解を助けるためのものであって、図示の態様に限定することを意図するものではない。
【0007】
本発明の第1の視点において、センサモジュールは組織処理装置の容器の温度を測定する温度センサ(サーモセンサ、Thermosensor)と、該容器の作業位置を検知する位置センサを有する。
[有利な実施の形態]
【0008】
センサモジュールはモジュール(モジュラー)形式となっている。本発明においてモジュール形式というのは、温度センサと位置センサと構造的、機能的に一体化されており、全体として組織処理装置に取り付け、取り外し可能な1つのユニットを形成しているという意味である。このようなセンサモジュールのモジュール形式、特に温度センサと位置センサを1つのユニットにしたことで、容器の温度と作業位置にあるか否かのチェックを1つのセンサモジュールで可能にし、組織処理装置の信頼性の高い操作を簡単な方法で保証することに寄与する。
【0009】
1つの有利な実施形態において、位置センサは、それが第1の操作位置にあるときには容器が作業位置にあることを示す第1のスイッチ要素を含む。第1のスイッチ要素が第2の位置にあるときには、それは容器が作業位置にないことを示す。第1のスイッチ要素は温度センサを含む。言い換えれば、温度センサは位置センサである1つのスイッチ要素の一部分を構成するものであり、センサモジュールのモジュール形式を強調し、特に温度センサと位置センサとの相互(連携)作用を強調するものである。温度センサを第1のスイッチ要素に統合することで、センサモジュールを特にコンパクトな構成とすることができる。
【0010】
他の有利な実施形態として、第1のスイッチ要素は容器と接触する接触部材を有する。好ましくは接触部材は球形状であり、相応する軸受け(ソケット)で回転自在に保持されている。特に、温度センサはその接触部材中に配置されうる。接触部材が球形状となっていることにより、第1のスイッチ要素に接触すべき容器の壁が製造誤差により、接触部材に対して斜めになっていた場合であっても、第1のスイッチ要素の信頼性の高い作動の保証に役立つ。
【0011】
本発明の第2の視点において、第1の処理媒体を収容するための第1の容器と、第1のセンサモジュールを有する組織処理装置が提供される。好ましくは、第1のセンサモジュールは上記のセンサモジュールと同じ構成である。第1の処理媒体を用いるとき、第1の容器は作業位置にある。センサモジュールは、第1の容器が作業位置にあるかどうかを検知し、そしてもしその第1の容器が作業位置にある場合は、その第1の容器の温度を測定するように配置される。言い換えれば、第1の容器を作業位置に配置することにより、センサモジュールの位置センサが作動(開始)する。
【0012】
位置センサの第1のスイッチ要素は温度センサを含む接触部材を有しており、容器の壁によって第1のスイッチ要素を駆動することにより温度センサが接触ヘッドを介して容器の壁と熱的に結合するため、センサモジュールの第1のスイッチ要素が容器の壁によって駆動されるときは、その壁の温度、即ち容器内の処理媒体の温度を測定することもまた可能となる。
【0013】
この点に関して、第1の容器が作業位置にあるときは、第1の容器は温度センサを含む第1のスイッチ要素を押圧して、第1のスイッチ要素が第1の操作位置に来るようにすることが特に好ましい。もしも第1の容器が作業位置にない場合は、第1の容器は、温度センサを含むスイッチ要素をその第1の操作位置に来るように押圧することはしない。そのかわり、第1のスイッチ要素は第1の操作位置からはずれ、第2の操作位置に配置される。第1の操作位置は、位置センサが、第1の容器が作業位置にあることを検知するいかなる位置をも含みうる。第2の操作位置は、位置センサが第1の容器が作業位置にあることを検知しないいかなる位置をも含みうる。
【0014】
更なる有利な実施形態において、同じ又は異なる処理媒体を含む2以上の容器が組織処理装置内に配される。各容器は別々のセンサモジュールに関連しており、各センサモジュールは各容器が作業位置にあるかどうかを検知し、各容器の温度即ち容器内の処理媒体の温度を測定する。
【0015】
本発明の第3の視点において、組織処理装置の操作方法が提供される。容器は組織処理装置のあるステーションに配置(挿入)される。そしてその容器がステーション内の作業位置にあるかどうかをチェックし、同時にその温度が測定される。
【0016】
本発明の典型的な実施形態を以下に図面とともに説明する。
【図面の簡単な説明】
【0017】
【図1】組織処理装置の外観図である。
【図2】センサモジュールの鳥瞰図である。
【図3】図2に示すセンサモジュールの横断面図である。
【図4】図2に示すセンサモジュールの縦断面図である。
【図5】図2に示すセンサモジュールの分解図である。
【発明を実施するための形態】
【0018】
同じ設計あるいは同じ機能を有する要素は、図面全体を通じて同じ参照符号で図示されている。
【0019】
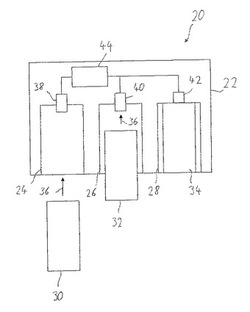
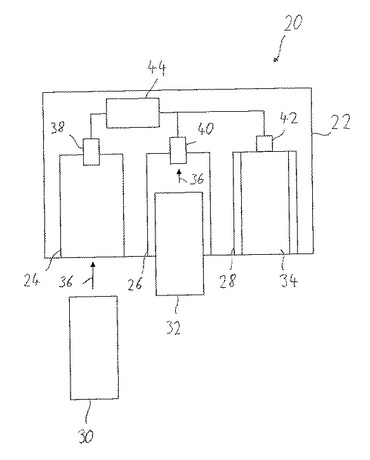
図1は、試料、特に組織試料を調製するための組織処理装置20である。組織はこれによる処理後にミクロトームで薄片に切断され、顕微鏡検査される。組織処理装置20による処理の間、組織試料(複数)は異なる処理媒体に次々に浸される。例えば、試料はアルコール、キシレン、パラフィンその他の処理媒体を用いて洗浄され、脱水され、包埋される。
【実施例】
【0020】
組織処理装置20は、処理媒体を入れるための第1のステーション24、第2のステーション26、第3のステーション28を有する。第1の容器30は、挿入方向36に沿って第1のステーション24に挿入することができる。第2の容器32は、第2のステーション26に部分的に挿入されており、挿入方向(矢印)36に沿ってさらに挿入することができる。第3の容器34は、完全に第3のステーション28に挿入されている。第3の容器34は作業位置にある。対照的に、第1の容器30と第2の容器32は作業位置にない。作業位置において、処理媒体(複数)はまた各容器30、32、34から排出され、また送り込まれる。
【0021】
第1の処理ステーション24は、第1のセンサモジュール38と関連して(に割当てられて)いる。第2の処理ステーション26は、第2のセンサモジュール40と関連している。第3の処理ステーション28は、第3のセンサモジュール42と関連している。各センサモジュール38、40、42は、各容器30、32、34が作業位置にあるかどうかを検知し、そして各容器30、32、34の温度、即ちその中の処理媒体の温度を測定するために用いられる。処理媒体の温度を測定するために各容器30、32、34の温度がセンサモジュール38、40、42を用いて測定される。センサモジュールはその機能として、各容器30、32、34の処理媒体の温度を、たとえば経験的に確立された変換則によって決定する。作業位置において、センサモジュール38、40、42は、好ましくは各容器30、32、34の底の壁面に接合(当接)する。組織処理装置20の運転中は、処理媒体の温度は、処理媒体のタイプによるが典型的には50℃から65℃の範囲である。しかし処理媒体のタイプによっては、特に異なる種類のパラフィンを用いる場合、及び/又は異なるメーカーのパラフィンを用いる場合は、温度はそれよりもかなり高かったり低かったりする。
【0022】
図1では、第3の容器34は作業位置にある。作業位置においては、第3の容器34は第3のセンサモジュール42を駆動し、その結果第3のセンサモジュールは第3の容器34が作業位置にあることを検知する。さらに、第3のセンサモジュール42と第3の容器34の壁面とは直接接触するため、第3の容器34即ち内部の処理媒体の温度の測定を容易かつ正確に行うことができる。
【0023】
各容器30、32、34にそれぞれ1つのセンサモジュール38、40、42を配することにより、各容器30、32、34の温度を他の容器から独立してそれぞれ正確に測定することができる。センサモジュール38、40、42は、センサモジュール38、40、42の出力信号に応じて各容器30、32、34を加熱する加熱装置(図示せず)を制御する処理ユニット44に電気的に接続されている。各容器30、32、34は、図示しない加熱装置で個別に加熱されることが好ましい。そうすることにより、センサモジュール38、40、42及び処理ユニット44を用いて、容器30、32、34内の処理媒体の温度を個別独立して(各別に)制御することができる。
【0024】
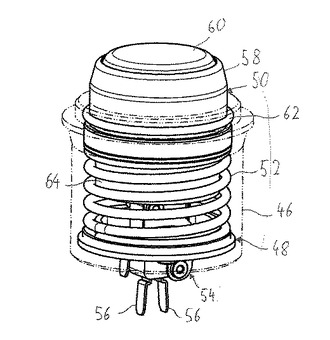
図2は、センサモジュール38、40、42のうちの1つの斜視図である。センサモジュール38、40、42は、図2で2点鎖線で示すモジュールハウジング46を含む。モジュールハウジング46は第1のスイッチ要素50と第2のスイッチ要素48を内蔵している。組織処理装置20の通常の使用中は、第2のスイッチ要素48は不動であり、組織処理装置20に固定結合されている。第1のスイッチ要素50は、第2のスイッチ要素48に対して可動式に搭載されている。そのため、第1のスイッチ要素50は第2のスイッチ要素48に弾性要素52、特にコイルばねによって弾性的に結合(嵌合)されている。このコイルばねにより、第1のスイッチ要素50は第2のスイッチ要素48に対して移動可能となっており、より具体的には弾性要素52の軸方向に移動(摺動)可能となっている。
【0025】
第1のスイッチ要素50は、ボールヘッド60と、そのボールヘッド60を支持するソケット58を含む。ボールヘッド60は一部が球形状となっており、その球形状の部分に対応したソケット58の球形状部で回転可能に支持されている。そこから離れて、ボールヘッド60は第2のスイッチ要素48から離れた方向の側に平坦な領域を有し、この平坦な領域は平坦面、特に容器30、32、34がその作業位置にあるときの容器30、32、34の底の平坦面を支持(平坦面に当接)するように構成されており、それによってセンサモジュール38、40、42と容器30、32、34との良好な熱的結合を形成する。ソケット58は、センサモジュール38、40、42の周辺の環境から外部シール62により密封されている。第1のスイッチ要素50は、第2のスイッチ要素48の方向に関して、閉止(シール)部材64により閉止されている。
【0026】
第2のスイッチ要素48は、スイッチ54を含む。スイッチ54は、センサモジュール38、40、42、特にスイッチ54と処理ユニット44とを結合(接続)可能な端子56(複数)を有する。
【0027】
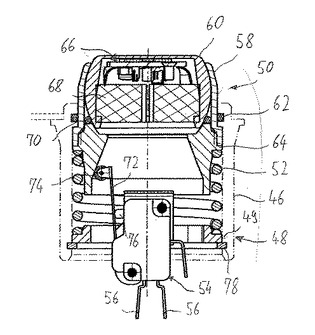
図3は、図2に示すセンサモジュール38、40、42の断面図である。ボールヘッド60は、内部に温度センサ66と絶縁材68、特に断熱材68を内蔵するくぼみを有する。温度センサ66はボールヘッド60の一面と直接結合されている。この面は、ボールヘッド60が作業位置にある容器30、32、34の1つの壁面と接触する面である。これにより、温度センサ66で測定すべき容器30、32、34の温度を高精度で測定することができる。ボールヘッド60は、少なくとも1°から15°の小さな角度においてどのような平面でも回転できるようにソケット58内に配置されている。内部シール70はソケット58、ボールヘッド60、及び閉止部材64の間に配置されている。容器30、32、34内の処理媒体の温度は、容器の温度の関数として決定(測定)できる。
【0028】
スイッチ54は、スイッチ操作アーム72、スイッチ操作ローラ74、及びスイッチ操作ボタン76を含むローラ式レバースイッチの形態をとっている。 スイッチ操作ローラ74は、閉止部材64の内表面と係合し、 スイッチ操作アーム72の末端部に取り付けられている。 スイッチ操作アーム72は、スイッチ操作ローラ74 の反対側のアーム端において、スイッチ54のハウジングに旋回可能に枢支(ないし係止)されている。それに代わり、又は補足的に、スイッチ操作アーム72は可撓性材料で形成することができる。スイッチ操作ボタン76は、スイッチ54のハウジングと スイッチ操作アーム72の間に配置されている。第1のスイッチ要素50と第2のスイッチ要素48とが相対的に移動、特に第1のスイッチ要素50が第2のスイッチ要素48の方向に軸方向に移動(図3図示の状態では下降)すると、 スイッチ操作ローラ74が閉止部材64の内表面(斜面、上方へ先細にコーン状に形成した円錐状面)に沿って転動する。その結果、スイッチ操作アーム72が旋回し又は撓み、スイッチ操作ボタン76をその第1の操作位置に(押圧)移動させる。スイッチ操作ボタン76が第1の操作位置にあるということは、対応する容器30、32、34が作業位置にあるということを意味する。
【0029】
容器30、32、34を各ステーション24、26、28に挿入する間に、容器が各センサモジュール38、40、42と接触し、それによってまず各ボールヘッド60の容器30、32、34に向いた面が容器の底面に対して平坦になるように配向される。さらに各容器30、32、34を挿入すると、第1のスイッチ要素50が第2のスイッチ要素48の方向(挿入方向)へ移動し、具体的にはその第1の操作位置に収まって、それは各容器30、32、34が作業位置にあることを示す。第1の操作位置において、第1のスイッチ要素50、特に第1のスイッチ要素50 の閉止部材64は、第2のスイッチ要素48、特にスイッチ54のスイッチ操作アーム72に対して、第2のスイッチ要素48、特にスイッチ操作アーム72及びスイッチ操作ボタン76がそれぞれ第1の操作位置になるように作用する。これにより、各容器30、32、34が作業位置にあることを示す出力信号が生成される。各容器30、32、34が作業位置にないときは、各センサモジュール38、40、42の第1のスイッチ要素はその第1の操作位置になく、具体的にはその第2の操作位置にある。ここでは、スイッチ操作アーム72及びスイッチ操作ボタン76もまた第1の操作位置になく、具体的には第2の操作位置にある。ここでは、各容器30、32、34が作業位置にあることを示す出力信号が生成されない。
【0030】
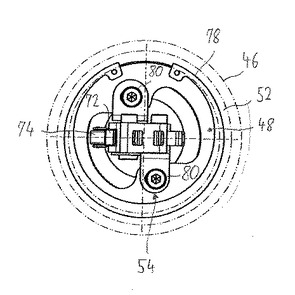
図4は、図2に示すセンサモジュール38、40、42の横断面図である。この横断面図は、第2のスイッチ要素48を上から見た図である。スイッチ54は、第2のスイッチ要素48のベースプレート49に固定されている。第2のスイッチ要素は、クランプリング78によってモジュールハウジング(外ケース)46に固定されている。
【0031】
図5は、センサモジュール38、40、42の分解(組立)図である。センサモジュール38、40、42を組み立てるため、最初に第1のスイッチ要素50を組み立てるのが好ましい。特に、温度センサ66と絶縁体68をボールヘッド60内に挿入する。次に、ボールヘッド60を内部シール70とともにソケット58に挿入し、閉止部材64で閉止する。このため、閉止部材64は例えばソケット58にネジではめ込むことができる。次に、第2のスイッチ要素48を、例えばスイッチ54をベースプレート49に固定手段80で固定することによって組み立てる。弾性要素52を第2のスイッチ要素48の上に配置し、次に第1のスイッチ要素50を弾性要素52の上に配置する。このようにして組み合わされた組立て体を、モジュールハウジング46内にクランプリング78を用いて固定する。このように構成されたセンサモジュール38、40、42は完成したユニットを構成し、組織処理装置に容易に取り付け、又は取り外すことができる。これにより、組織処理装置20のメンテナンスが容易となる。さらに、センサモジュール38、40、42は完全に閉じたモジュラーユニットであるため、温度センサ66と位置センサが例えば処理媒体の1つによって汚染されることを防止できる。さらに、それぞれのステーション24、26、28はセンサモジュール38、40、42を破損又は汚染することなく容易に洗浄できる。
【0032】
センサモジュール38、40、42をモジュール化することにより、組織処理装置20の信頼性の高い、特に簡便な運転が可能となる。特に、簡単な方法で、それぞれの容器30、32、34内の処理媒体の温度を正確に測定することができると同時に、それぞれの容器30、32、34が作業位置にあるかどうかをチェックすることができる。2つのセンサユニットの相乗効果、特に温度センサ66が位置センサを動かす可動要素と一体化しているという事実によって、モジュール化設計のコンパクトな本質が強調される。
【0033】
本発明において可能な形態は次のように例示される。即ち、
(形態1)組織処理装置の容器の温度を測定するための温度センサと、該容器の作業位置を検知するための位置センサを有することを特徴とする、組織処理装置のためのセンサモジュールである。
(形態2)前記位置センサは、第1の操作位置にあるときは前記容器が前記作業位置にあることを示し、第2の操作位置にあるときは前記容器が前記作業位置にないことを示す、第1のスイッチ要素を含み、該第1のスイッチ要素は前記温度センサを含む、ことを特徴とする、センサモジュールである。
(形態3)前記位置センサは、前記第1のスイッチ要素が第1の操作位置にあるときには、自らも第1の操作位置にある不動の第2のスイッチ要素を含み、該第2のスイッチ要素が第1の操作位置にあるときには前記容器が前記作業位置にあることを示す出力信号を前記センサモジュールが生成する、ことを特徴とする、センサモジュールである。
(形態4)前記第2のスイッチ要素はスイッチ操作ボタンと旋回可能に取り付けられたスイッチ操作アームを含み、該スイッチ操作アームは該スイッチ操作ボタンと結合されるとともに、一方の端部領域には前記第1のスイッチ要素に連係された回転可能なローラを有し、前記第2のスイッチ要素に対する該第1のスイッチ要素の動きによって該ローラが該第1のスイッチ要素の表面に沿って転動し、それによって該スイッチ操作アームが該スイッチ操作ボタンを駆動するように動くように、該ローラを有する該スイッチ操作アームと該第1のスイッチ要素とが互いに構成され配置されている、ことを特徴とする、センサモジュールである。
(形態5)弾性要素が前記第1と第2のスイッチ要素の間に、該第1のスイッチ要素に対して前記第2の操作位置に向けて力がかかるように予圧されて配置されていることを特徴とする、センサモジュールである。
(形態6)前記第1のスイッチ要素は、前記容器と接触する接触部材を有し、該接触部材は球形状であり、相応する軸受け内に回転可能に保持されていることを特徴とする、センサモジュールである。
(形態7)前記温度センサが球形状の前記接触部材内に配置されていることを特徴とする、センサモジュールである。
(形態8)組織試料を処理するための組織処理装置であって、該装置は、第1の処理媒体を収容するための、該第1の処理媒体の使用中はその作業位置にある第1の容器と、上記のいずれかの第1のセンサモジュールとを有し、該第1のセンサモジュールは、該第1の容器がその作業位置にあるかどうかを検知するとともに、該第1の容器が作業位置にあるときは該第1の容器の温度を測定するように配置されることを特徴とする、組織処理装置である。
(形態9)もしも前記第1の容器がその作業位置にあるときは、該第1の容器が前記温度センサを含む前記第1のスイッチ要素を押し、該第1のスイッチ要素は第1の操作位置にある状態となり、もしも前記第1の容器がその作業位置にないときは、該第1の容器が前記温度センサを含む前記第1のスイッチ要素を押さず、該第1のスイッチ要素は第2の操作位置にある状態となることを特徴とする、組織処理装置である。
(形態10)第2の処理媒体を収容するための少なくとも1つの第2の容器と、前記第1のセンサモジュールと同じ構成であって該第2の容器の位置と温度を測定可能なように配置されている第2のセンサモジュールを含むことを特徴とする、組織処理装置である。
(形態11)複数の処理媒体を収容するための複数の容器と、該容器のそれぞれと関連付けられた複数のセンサモジュールを含むことを特徴とする、組織処理装置である。
(形態12)組織処理装置の操作方法であって、処理媒体を収容するための容器をステーションに挿入する工程と、該ステーションに挿入された該容器が作業位置にあるかどうかをチェックする工程と、同時に該容器の温度を測定する工程と、を含む操作方法である。
しかし本発明は上記の実施形態に限定されるものではない。例えば、第2スイッチ要素48は、温度センサ66の動きにより位置センサが駆動される形式のものであればどんなものでもかまわない。さらに、温度センサ66をボールヘッド60に入れ込むかわりに、例えば普通の円筒形の押圧ヘッドに取り付けることができる。また、弾性要素52はばねでなくともよい。さらに、スイッチ54としてローラ式レバースイッチのかわりに他の適切なスイッチを用いてもよい。
本発明は、上記の実施形態に基づき開示した実施形態に対し任意の修正、選択、組み合わせ及び変更を、本発明に開示しない内在する解決原理ないしコンセプトに基づき当業者に自明な範囲で許容するものである。
【符号の説明】
【0034】
20 組織処理装置
22 処理装置筐体
24 第1のステーション
26 第2のステーション
28 第3のステーション
30 第1の容器
32 第2の容器
34 第3の容器
36 挿入方向
38 第1のセンサモジュール
40 第2のセンサモジュール
42 第3のセンサモジュール
44 処理ユニット
46 モジュールハウジング
48 第2のスイッチ要素
49 ベースプレート
50 第1のスイッチ要素
52 弾性要素
54 スイッチ
56 端子
58 ソケット
60 ボールヘッド
62 外部シール
64 閉止部材
66 温度センサ
68 絶縁体
70 内部シール
72 スイッチ操作アーム
74 スイッチ操作ローラ
76 スイッチ操作ボタン
78 クランプリング
80 固定手段
【技術分野】
【0001】
本願は、2010年6月30日出願に係るドイツ特許出願第102010017667.2号の優先権を主張するものであり、その全記載事項は本書に引用をもって組込み記載されているものとする。
本発明は、組織処理装置のセンサモジュールに関する。このセンサモジュールは、組織処理装置の容器の温度を測定するための温度センサを含む。本発明はまた、処理媒体を収容する容器及びその容器の温度を測定するセンサモジュールを有する組織処理装置に関する。さらに、本発明は組織処理装置の操作方法に関する。
【背景技術】
【0002】
試料、特に組織試料を顕微鏡を用いて検査するため、しばしばそのための組織試料を調製する必要がある。特に顕微鏡で検査できるようにするため、試料は非常に薄い切片に切断する必要がある。組織試料の薄片化は通常ミクロトームを用いて行われる。組織試料を正確に薄片化するため、試料はまず処理工程に供される。例えば、試料はパラフィンブロックに包埋されうる。試料の包埋化は、一般的に知られた組織処理装置を用いて行われるが、その組織処理装置は処理媒体を含む複数の容器を有している。処理を行うには、試料を容器内に入れるか、又は試料を試料処理用のレトルトに入れて、その中に処理媒体を容器からポンプで送り込む。
【0003】
処理媒体を扱う場合、そのプロセスパラメータを所定の範囲に保つことが要求される。例えば、パラフィンを処理媒体として用いる場合、パラフィンを所定の好ましい温度から±2Kの精度で保たなければならない。その理由は、第1にパラフィンを液状に保つため、そして第2に、パラフィンに含まれる添加物が加熱のしすぎによって壊れないようにするためである。処理媒体の温度を測定するために、1以上の処理媒体を含む容器の温度を測定する温度センサを取り付けることが知られている。加熱装置を用いて処理媒体の温度は所定の好ましい温度、あるいは異なるいろいろな目標値にコントロールすることができる。
【発明の概要】
【発明が解決しようとする課題】
【0004】
組織処理装置を操作する間、容器は作業位置に配置され、処理媒体がその容器にポンプで入れられたり、取り出されたりする。もしも組織処理装置の操作時に容器のいずれかが、組織処理装置内に配置されていないことや、あるいは作業位置に完全には配置されていないことで所定の作業位置にない場合、処理媒体が接続部や配管、及び/又は組織処理装置からリークし、組織処理装置やその周囲の環境を汚染し、及び/又は組織処理装置の正常な機能を害することとなる。さらに、熱い、あるいは有害な処理媒体がリークすることで、操作員の負傷の原因ともなる。
【0005】
本発明の課題は、簡単な方法で安全かつ信頼性の高い組織処理装置の操作を行うことを保証するセンサモジュール、それを有する組織処理装置及びその組織処理装置の操作方法を提供することである。
【課題を解決するための手段】
【0006】
この課題は、各独立項(下記の第1〜第3の各視点に対応)の特徴によって達成される。有利な実施形態は従属項(下記の実施形態に対応)に述べたとおりである。なお、特許請求の範囲に付記した図面参照符号は、専ら理解を助けるためのものであって、図示の態様に限定することを意図するものではない。
【0007】
本発明の第1の視点において、センサモジュールは組織処理装置の容器の温度を測定する温度センサ(サーモセンサ、Thermosensor)と、該容器の作業位置を検知する位置センサを有する。
[有利な実施の形態]
【0008】
センサモジュールはモジュール(モジュラー)形式となっている。本発明においてモジュール形式というのは、温度センサと位置センサと構造的、機能的に一体化されており、全体として組織処理装置に取り付け、取り外し可能な1つのユニットを形成しているという意味である。このようなセンサモジュールのモジュール形式、特に温度センサと位置センサを1つのユニットにしたことで、容器の温度と作業位置にあるか否かのチェックを1つのセンサモジュールで可能にし、組織処理装置の信頼性の高い操作を簡単な方法で保証することに寄与する。
【0009】
1つの有利な実施形態において、位置センサは、それが第1の操作位置にあるときには容器が作業位置にあることを示す第1のスイッチ要素を含む。第1のスイッチ要素が第2の位置にあるときには、それは容器が作業位置にないことを示す。第1のスイッチ要素は温度センサを含む。言い換えれば、温度センサは位置センサである1つのスイッチ要素の一部分を構成するものであり、センサモジュールのモジュール形式を強調し、特に温度センサと位置センサとの相互(連携)作用を強調するものである。温度センサを第1のスイッチ要素に統合することで、センサモジュールを特にコンパクトな構成とすることができる。
【0010】
他の有利な実施形態として、第1のスイッチ要素は容器と接触する接触部材を有する。好ましくは接触部材は球形状であり、相応する軸受け(ソケット)で回転自在に保持されている。特に、温度センサはその接触部材中に配置されうる。接触部材が球形状となっていることにより、第1のスイッチ要素に接触すべき容器の壁が製造誤差により、接触部材に対して斜めになっていた場合であっても、第1のスイッチ要素の信頼性の高い作動の保証に役立つ。
【0011】
本発明の第2の視点において、第1の処理媒体を収容するための第1の容器と、第1のセンサモジュールを有する組織処理装置が提供される。好ましくは、第1のセンサモジュールは上記のセンサモジュールと同じ構成である。第1の処理媒体を用いるとき、第1の容器は作業位置にある。センサモジュールは、第1の容器が作業位置にあるかどうかを検知し、そしてもしその第1の容器が作業位置にある場合は、その第1の容器の温度を測定するように配置される。言い換えれば、第1の容器を作業位置に配置することにより、センサモジュールの位置センサが作動(開始)する。
【0012】
位置センサの第1のスイッチ要素は温度センサを含む接触部材を有しており、容器の壁によって第1のスイッチ要素を駆動することにより温度センサが接触ヘッドを介して容器の壁と熱的に結合するため、センサモジュールの第1のスイッチ要素が容器の壁によって駆動されるときは、その壁の温度、即ち容器内の処理媒体の温度を測定することもまた可能となる。
【0013】
この点に関して、第1の容器が作業位置にあるときは、第1の容器は温度センサを含む第1のスイッチ要素を押圧して、第1のスイッチ要素が第1の操作位置に来るようにすることが特に好ましい。もしも第1の容器が作業位置にない場合は、第1の容器は、温度センサを含むスイッチ要素をその第1の操作位置に来るように押圧することはしない。そのかわり、第1のスイッチ要素は第1の操作位置からはずれ、第2の操作位置に配置される。第1の操作位置は、位置センサが、第1の容器が作業位置にあることを検知するいかなる位置をも含みうる。第2の操作位置は、位置センサが第1の容器が作業位置にあることを検知しないいかなる位置をも含みうる。
【0014】
更なる有利な実施形態において、同じ又は異なる処理媒体を含む2以上の容器が組織処理装置内に配される。各容器は別々のセンサモジュールに関連しており、各センサモジュールは各容器が作業位置にあるかどうかを検知し、各容器の温度即ち容器内の処理媒体の温度を測定する。
【0015】
本発明の第3の視点において、組織処理装置の操作方法が提供される。容器は組織処理装置のあるステーションに配置(挿入)される。そしてその容器がステーション内の作業位置にあるかどうかをチェックし、同時にその温度が測定される。
【0016】
本発明の典型的な実施形態を以下に図面とともに説明する。
【図面の簡単な説明】
【0017】
【図1】組織処理装置の外観図である。
【図2】センサモジュールの鳥瞰図である。
【図3】図2に示すセンサモジュールの横断面図である。
【図4】図2に示すセンサモジュールの縦断面図である。
【図5】図2に示すセンサモジュールの分解図である。
【発明を実施するための形態】
【0018】
同じ設計あるいは同じ機能を有する要素は、図面全体を通じて同じ参照符号で図示されている。
【0019】
図1は、試料、特に組織試料を調製するための組織処理装置20である。組織はこれによる処理後にミクロトームで薄片に切断され、顕微鏡検査される。組織処理装置20による処理の間、組織試料(複数)は異なる処理媒体に次々に浸される。例えば、試料はアルコール、キシレン、パラフィンその他の処理媒体を用いて洗浄され、脱水され、包埋される。
【実施例】
【0020】
組織処理装置20は、処理媒体を入れるための第1のステーション24、第2のステーション26、第3のステーション28を有する。第1の容器30は、挿入方向36に沿って第1のステーション24に挿入することができる。第2の容器32は、第2のステーション26に部分的に挿入されており、挿入方向(矢印)36に沿ってさらに挿入することができる。第3の容器34は、完全に第3のステーション28に挿入されている。第3の容器34は作業位置にある。対照的に、第1の容器30と第2の容器32は作業位置にない。作業位置において、処理媒体(複数)はまた各容器30、32、34から排出され、また送り込まれる。
【0021】
第1の処理ステーション24は、第1のセンサモジュール38と関連して(に割当てられて)いる。第2の処理ステーション26は、第2のセンサモジュール40と関連している。第3の処理ステーション28は、第3のセンサモジュール42と関連している。各センサモジュール38、40、42は、各容器30、32、34が作業位置にあるかどうかを検知し、そして各容器30、32、34の温度、即ちその中の処理媒体の温度を測定するために用いられる。処理媒体の温度を測定するために各容器30、32、34の温度がセンサモジュール38、40、42を用いて測定される。センサモジュールはその機能として、各容器30、32、34の処理媒体の温度を、たとえば経験的に確立された変換則によって決定する。作業位置において、センサモジュール38、40、42は、好ましくは各容器30、32、34の底の壁面に接合(当接)する。組織処理装置20の運転中は、処理媒体の温度は、処理媒体のタイプによるが典型的には50℃から65℃の範囲である。しかし処理媒体のタイプによっては、特に異なる種類のパラフィンを用いる場合、及び/又は異なるメーカーのパラフィンを用いる場合は、温度はそれよりもかなり高かったり低かったりする。
【0022】
図1では、第3の容器34は作業位置にある。作業位置においては、第3の容器34は第3のセンサモジュール42を駆動し、その結果第3のセンサモジュールは第3の容器34が作業位置にあることを検知する。さらに、第3のセンサモジュール42と第3の容器34の壁面とは直接接触するため、第3の容器34即ち内部の処理媒体の温度の測定を容易かつ正確に行うことができる。
【0023】
各容器30、32、34にそれぞれ1つのセンサモジュール38、40、42を配することにより、各容器30、32、34の温度を他の容器から独立してそれぞれ正確に測定することができる。センサモジュール38、40、42は、センサモジュール38、40、42の出力信号に応じて各容器30、32、34を加熱する加熱装置(図示せず)を制御する処理ユニット44に電気的に接続されている。各容器30、32、34は、図示しない加熱装置で個別に加熱されることが好ましい。そうすることにより、センサモジュール38、40、42及び処理ユニット44を用いて、容器30、32、34内の処理媒体の温度を個別独立して(各別に)制御することができる。
【0024】
図2は、センサモジュール38、40、42のうちの1つの斜視図である。センサモジュール38、40、42は、図2で2点鎖線で示すモジュールハウジング46を含む。モジュールハウジング46は第1のスイッチ要素50と第2のスイッチ要素48を内蔵している。組織処理装置20の通常の使用中は、第2のスイッチ要素48は不動であり、組織処理装置20に固定結合されている。第1のスイッチ要素50は、第2のスイッチ要素48に対して可動式に搭載されている。そのため、第1のスイッチ要素50は第2のスイッチ要素48に弾性要素52、特にコイルばねによって弾性的に結合(嵌合)されている。このコイルばねにより、第1のスイッチ要素50は第2のスイッチ要素48に対して移動可能となっており、より具体的には弾性要素52の軸方向に移動(摺動)可能となっている。
【0025】
第1のスイッチ要素50は、ボールヘッド60と、そのボールヘッド60を支持するソケット58を含む。ボールヘッド60は一部が球形状となっており、その球形状の部分に対応したソケット58の球形状部で回転可能に支持されている。そこから離れて、ボールヘッド60は第2のスイッチ要素48から離れた方向の側に平坦な領域を有し、この平坦な領域は平坦面、特に容器30、32、34がその作業位置にあるときの容器30、32、34の底の平坦面を支持(平坦面に当接)するように構成されており、それによってセンサモジュール38、40、42と容器30、32、34との良好な熱的結合を形成する。ソケット58は、センサモジュール38、40、42の周辺の環境から外部シール62により密封されている。第1のスイッチ要素50は、第2のスイッチ要素48の方向に関して、閉止(シール)部材64により閉止されている。
【0026】
第2のスイッチ要素48は、スイッチ54を含む。スイッチ54は、センサモジュール38、40、42、特にスイッチ54と処理ユニット44とを結合(接続)可能な端子56(複数)を有する。
【0027】
図3は、図2に示すセンサモジュール38、40、42の断面図である。ボールヘッド60は、内部に温度センサ66と絶縁材68、特に断熱材68を内蔵するくぼみを有する。温度センサ66はボールヘッド60の一面と直接結合されている。この面は、ボールヘッド60が作業位置にある容器30、32、34の1つの壁面と接触する面である。これにより、温度センサ66で測定すべき容器30、32、34の温度を高精度で測定することができる。ボールヘッド60は、少なくとも1°から15°の小さな角度においてどのような平面でも回転できるようにソケット58内に配置されている。内部シール70はソケット58、ボールヘッド60、及び閉止部材64の間に配置されている。容器30、32、34内の処理媒体の温度は、容器の温度の関数として決定(測定)できる。
【0028】
スイッチ54は、スイッチ操作アーム72、スイッチ操作ローラ74、及びスイッチ操作ボタン76を含むローラ式レバースイッチの形態をとっている。 スイッチ操作ローラ74は、閉止部材64の内表面と係合し、 スイッチ操作アーム72の末端部に取り付けられている。 スイッチ操作アーム72は、スイッチ操作ローラ74 の反対側のアーム端において、スイッチ54のハウジングに旋回可能に枢支(ないし係止)されている。それに代わり、又は補足的に、スイッチ操作アーム72は可撓性材料で形成することができる。スイッチ操作ボタン76は、スイッチ54のハウジングと スイッチ操作アーム72の間に配置されている。第1のスイッチ要素50と第2のスイッチ要素48とが相対的に移動、特に第1のスイッチ要素50が第2のスイッチ要素48の方向に軸方向に移動(図3図示の状態では下降)すると、 スイッチ操作ローラ74が閉止部材64の内表面(斜面、上方へ先細にコーン状に形成した円錐状面)に沿って転動する。その結果、スイッチ操作アーム72が旋回し又は撓み、スイッチ操作ボタン76をその第1の操作位置に(押圧)移動させる。スイッチ操作ボタン76が第1の操作位置にあるということは、対応する容器30、32、34が作業位置にあるということを意味する。
【0029】
容器30、32、34を各ステーション24、26、28に挿入する間に、容器が各センサモジュール38、40、42と接触し、それによってまず各ボールヘッド60の容器30、32、34に向いた面が容器の底面に対して平坦になるように配向される。さらに各容器30、32、34を挿入すると、第1のスイッチ要素50が第2のスイッチ要素48の方向(挿入方向)へ移動し、具体的にはその第1の操作位置に収まって、それは各容器30、32、34が作業位置にあることを示す。第1の操作位置において、第1のスイッチ要素50、特に第1のスイッチ要素50 の閉止部材64は、第2のスイッチ要素48、特にスイッチ54のスイッチ操作アーム72に対して、第2のスイッチ要素48、特にスイッチ操作アーム72及びスイッチ操作ボタン76がそれぞれ第1の操作位置になるように作用する。これにより、各容器30、32、34が作業位置にあることを示す出力信号が生成される。各容器30、32、34が作業位置にないときは、各センサモジュール38、40、42の第1のスイッチ要素はその第1の操作位置になく、具体的にはその第2の操作位置にある。ここでは、スイッチ操作アーム72及びスイッチ操作ボタン76もまた第1の操作位置になく、具体的には第2の操作位置にある。ここでは、各容器30、32、34が作業位置にあることを示す出力信号が生成されない。
【0030】
図4は、図2に示すセンサモジュール38、40、42の横断面図である。この横断面図は、第2のスイッチ要素48を上から見た図である。スイッチ54は、第2のスイッチ要素48のベースプレート49に固定されている。第2のスイッチ要素は、クランプリング78によってモジュールハウジング(外ケース)46に固定されている。
【0031】
図5は、センサモジュール38、40、42の分解(組立)図である。センサモジュール38、40、42を組み立てるため、最初に第1のスイッチ要素50を組み立てるのが好ましい。特に、温度センサ66と絶縁体68をボールヘッド60内に挿入する。次に、ボールヘッド60を内部シール70とともにソケット58に挿入し、閉止部材64で閉止する。このため、閉止部材64は例えばソケット58にネジではめ込むことができる。次に、第2のスイッチ要素48を、例えばスイッチ54をベースプレート49に固定手段80で固定することによって組み立てる。弾性要素52を第2のスイッチ要素48の上に配置し、次に第1のスイッチ要素50を弾性要素52の上に配置する。このようにして組み合わされた組立て体を、モジュールハウジング46内にクランプリング78を用いて固定する。このように構成されたセンサモジュール38、40、42は完成したユニットを構成し、組織処理装置に容易に取り付け、又は取り外すことができる。これにより、組織処理装置20のメンテナンスが容易となる。さらに、センサモジュール38、40、42は完全に閉じたモジュラーユニットであるため、温度センサ66と位置センサが例えば処理媒体の1つによって汚染されることを防止できる。さらに、それぞれのステーション24、26、28はセンサモジュール38、40、42を破損又は汚染することなく容易に洗浄できる。
【0032】
センサモジュール38、40、42をモジュール化することにより、組織処理装置20の信頼性の高い、特に簡便な運転が可能となる。特に、簡単な方法で、それぞれの容器30、32、34内の処理媒体の温度を正確に測定することができると同時に、それぞれの容器30、32、34が作業位置にあるかどうかをチェックすることができる。2つのセンサユニットの相乗効果、特に温度センサ66が位置センサを動かす可動要素と一体化しているという事実によって、モジュール化設計のコンパクトな本質が強調される。
【0033】
本発明において可能な形態は次のように例示される。即ち、
(形態1)組織処理装置の容器の温度を測定するための温度センサと、該容器の作業位置を検知するための位置センサを有することを特徴とする、組織処理装置のためのセンサモジュールである。
(形態2)前記位置センサは、第1の操作位置にあるときは前記容器が前記作業位置にあることを示し、第2の操作位置にあるときは前記容器が前記作業位置にないことを示す、第1のスイッチ要素を含み、該第1のスイッチ要素は前記温度センサを含む、ことを特徴とする、センサモジュールである。
(形態3)前記位置センサは、前記第1のスイッチ要素が第1の操作位置にあるときには、自らも第1の操作位置にある不動の第2のスイッチ要素を含み、該第2のスイッチ要素が第1の操作位置にあるときには前記容器が前記作業位置にあることを示す出力信号を前記センサモジュールが生成する、ことを特徴とする、センサモジュールである。
(形態4)前記第2のスイッチ要素はスイッチ操作ボタンと旋回可能に取り付けられたスイッチ操作アームを含み、該スイッチ操作アームは該スイッチ操作ボタンと結合されるとともに、一方の端部領域には前記第1のスイッチ要素に連係された回転可能なローラを有し、前記第2のスイッチ要素に対する該第1のスイッチ要素の動きによって該ローラが該第1のスイッチ要素の表面に沿って転動し、それによって該スイッチ操作アームが該スイッチ操作ボタンを駆動するように動くように、該ローラを有する該スイッチ操作アームと該第1のスイッチ要素とが互いに構成され配置されている、ことを特徴とする、センサモジュールである。
(形態5)弾性要素が前記第1と第2のスイッチ要素の間に、該第1のスイッチ要素に対して前記第2の操作位置に向けて力がかかるように予圧されて配置されていることを特徴とする、センサモジュールである。
(形態6)前記第1のスイッチ要素は、前記容器と接触する接触部材を有し、該接触部材は球形状であり、相応する軸受け内に回転可能に保持されていることを特徴とする、センサモジュールである。
(形態7)前記温度センサが球形状の前記接触部材内に配置されていることを特徴とする、センサモジュールである。
(形態8)組織試料を処理するための組織処理装置であって、該装置は、第1の処理媒体を収容するための、該第1の処理媒体の使用中はその作業位置にある第1の容器と、上記のいずれかの第1のセンサモジュールとを有し、該第1のセンサモジュールは、該第1の容器がその作業位置にあるかどうかを検知するとともに、該第1の容器が作業位置にあるときは該第1の容器の温度を測定するように配置されることを特徴とする、組織処理装置である。
(形態9)もしも前記第1の容器がその作業位置にあるときは、該第1の容器が前記温度センサを含む前記第1のスイッチ要素を押し、該第1のスイッチ要素は第1の操作位置にある状態となり、もしも前記第1の容器がその作業位置にないときは、該第1の容器が前記温度センサを含む前記第1のスイッチ要素を押さず、該第1のスイッチ要素は第2の操作位置にある状態となることを特徴とする、組織処理装置である。
(形態10)第2の処理媒体を収容するための少なくとも1つの第2の容器と、前記第1のセンサモジュールと同じ構成であって該第2の容器の位置と温度を測定可能なように配置されている第2のセンサモジュールを含むことを特徴とする、組織処理装置である。
(形態11)複数の処理媒体を収容するための複数の容器と、該容器のそれぞれと関連付けられた複数のセンサモジュールを含むことを特徴とする、組織処理装置である。
(形態12)組織処理装置の操作方法であって、処理媒体を収容するための容器をステーションに挿入する工程と、該ステーションに挿入された該容器が作業位置にあるかどうかをチェックする工程と、同時に該容器の温度を測定する工程と、を含む操作方法である。
しかし本発明は上記の実施形態に限定されるものではない。例えば、第2スイッチ要素48は、温度センサ66の動きにより位置センサが駆動される形式のものであればどんなものでもかまわない。さらに、温度センサ66をボールヘッド60に入れ込むかわりに、例えば普通の円筒形の押圧ヘッドに取り付けることができる。また、弾性要素52はばねでなくともよい。さらに、スイッチ54としてローラ式レバースイッチのかわりに他の適切なスイッチを用いてもよい。
本発明は、上記の実施形態に基づき開示した実施形態に対し任意の修正、選択、組み合わせ及び変更を、本発明に開示しない内在する解決原理ないしコンセプトに基づき当業者に自明な範囲で許容するものである。
【符号の説明】
【0034】
20 組織処理装置
22 処理装置筐体
24 第1のステーション
26 第2のステーション
28 第3のステーション
30 第1の容器
32 第2の容器
34 第3の容器
36 挿入方向
38 第1のセンサモジュール
40 第2のセンサモジュール
42 第3のセンサモジュール
44 処理ユニット
46 モジュールハウジング
48 第2のスイッチ要素
49 ベースプレート
50 第1のスイッチ要素
52 弾性要素
54 スイッチ
56 端子
58 ソケット
60 ボールヘッド
62 外部シール
64 閉止部材
66 温度センサ
68 絶縁体
70 内部シール
72 スイッチ操作アーム
74 スイッチ操作ローラ
76 スイッチ操作ボタン
78 クランプリング
80 固定手段
【特許請求の範囲】
【請求項1】
組織処理装置(20)の容器(30、32、34)の温度を測定するための温度センサ(66)と、該容器(30、32、34)の作業位置を検知するための位置センサを有することを特徴とする、組織処理装置(20)のためのセンサモジュール。
【請求項2】
前記位置センサは、第1の操作位置にあるときは前記容器(30、32、34)が前記作業位置にあることを示し、第2の操作位置にあるときは前記容器(30、32、34)が前記作業位置にないことを示す、第1のスイッチ要素(50)を含み、
該第1のスイッチ要素(50)は前記温度センサ(66)を含む、ことを特徴とする、請求項1に記載のセンサモジュール。
【請求項3】
前記位置センサは、前記第1のスイッチ要素(50)が第1の操作位置にあるときには、自らも第1の操作位置にある不動の第2のスイッチ要素(48)を含み、
該第2のスイッチ要素(48)が第1の操作位置にあるときには前記容器(30、32、34)が前記作業位置にあることを示す出力信号を前記センサモジュール(38、40、42)が生成する、ことを特徴とする、請求項2に記載のセンサモジュール。
【請求項4】
前記第2のスイッチ要素(48)はスイッチ操作ボタン(76)と旋回可能に取り付けられたスイッチ操作アーム(72)を含み、
該スイッチ操作アーム(72)は該スイッチ操作ボタン(76)と結合されるとともに、一方の端部領域には前記第1のスイッチ要素(50)に連係された回転可能なローラ(74)を有し、
前記第2のスイッチ要素(48)に対する該第1のスイッチ要素(50)の動きによって該ローラ(74)が該第1のスイッチ要素(50)の表面に沿って転動し、それによって該スイッチ操作アーム(72)が該スイッチ操作ボタン(76)を駆動するように動くように、該ローラ(74)を有する該スイッチ操作アーム(72)と該第1のスイッチ要素(50)とが互いに構成され配置されている、ことを特徴とする、請求項3に記載のセンサモジュール。
【請求項5】
弾性要素(52)が前記第1と第2のスイッチ要素(50、48)の間に、該第1のスイッチ要素(50)に対して前記第2の操作位置に向けて力がかかるように予圧されて配置されていることを特徴とする、請求項3又は4に記載のセンサモジュール。
【請求項6】
前記第1のスイッチ要素(50)は、前記容器(30、32、34)と接触する接触部材(60)を有し、該接触部材は球形状であり、相応する軸受け内に回転可能に保持されていることを特徴とする、請求項2〜5のいずれか一に記載のセンサモジュール。
【請求項7】
前記温度センサ(66)が球形状の前記接触部材内に配置されていることを特徴とする、請求項6に記載のセンサモジュール。
【請求項8】
組織試料を処理するための組織処理装置であって、該装置は、
第1の処理媒体を収容するための、該第1の処理媒体の使用中はその作業位置にある第1の容器(30)と、請求項1〜7のいずれか一に記載の第1のセンサモジュール(38)とを有し、
該第1のセンサモジュールは、該第1の容器(30)がその作業位置にあるかどうかを検知するとともに、該第1の容器が作業位置にあるときは該第1の容器(30)の温度を測定するように配置されることを特徴とする、組織処理装置。
【請求項9】
もしも前記第1の容器(30)がその作業位置にあるときは、該第1の容器(30)が前記温度センサ(66)を含む前記第1のスイッチ要素(50)を押し、該第1のスイッチ要素(50)は第1の操作位置にある状態となり、
もしも前記第1の容器(30)がその作業位置にないときは、該第1の容器(30)が前記温度センサ(66)を含む前記第1のスイッチ要素(50)を押さず、該第1のスイッチ要素(50)は第2の操作位置にある状態となることを特徴とする、請求項8に記載の組織処理装置。
【請求項10】
第2の処理媒体を収容するための少なくとも1つの第2の容器(32)と、前記第1のセンサモジュール(38)と同じ構成であって該第2の容器(32)の位置と温度を測定可能なように配置されている第2のセンサモジュール(40)を含むことを特徴とする、請求項8又は9に記載の組織処理装置。
【請求項11】
複数の処理媒体を収容するための複数の容器(30、32、34)と、該容器(30、32、34)のそれぞれと関連付けられた複数のセンサモジュール(38、40、42)を含むことを特徴とする、請求項10に記載の組織処理装置。
【請求項12】
組織処理装置(20)の操作方法であって、
処理媒体を収容するための容器(30、32、34)をステーション(24、26、28)に挿入する工程と、
該ステーション(24、26、28)に挿入された該容器(30、32、34)が作業位置にあるかどうかをチェックする工程と、
同時に該容器(30、32、34)の温度を測定する工程と、を含む操作方法。
【請求項1】
組織処理装置(20)の容器(30、32、34)の温度を測定するための温度センサ(66)と、該容器(30、32、34)の作業位置を検知するための位置センサを有することを特徴とする、組織処理装置(20)のためのセンサモジュール。
【請求項2】
前記位置センサは、第1の操作位置にあるときは前記容器(30、32、34)が前記作業位置にあることを示し、第2の操作位置にあるときは前記容器(30、32、34)が前記作業位置にないことを示す、第1のスイッチ要素(50)を含み、
該第1のスイッチ要素(50)は前記温度センサ(66)を含む、ことを特徴とする、請求項1に記載のセンサモジュール。
【請求項3】
前記位置センサは、前記第1のスイッチ要素(50)が第1の操作位置にあるときには、自らも第1の操作位置にある不動の第2のスイッチ要素(48)を含み、
該第2のスイッチ要素(48)が第1の操作位置にあるときには前記容器(30、32、34)が前記作業位置にあることを示す出力信号を前記センサモジュール(38、40、42)が生成する、ことを特徴とする、請求項2に記載のセンサモジュール。
【請求項4】
前記第2のスイッチ要素(48)はスイッチ操作ボタン(76)と旋回可能に取り付けられたスイッチ操作アーム(72)を含み、
該スイッチ操作アーム(72)は該スイッチ操作ボタン(76)と結合されるとともに、一方の端部領域には前記第1のスイッチ要素(50)に連係された回転可能なローラ(74)を有し、
前記第2のスイッチ要素(48)に対する該第1のスイッチ要素(50)の動きによって該ローラ(74)が該第1のスイッチ要素(50)の表面に沿って転動し、それによって該スイッチ操作アーム(72)が該スイッチ操作ボタン(76)を駆動するように動くように、該ローラ(74)を有する該スイッチ操作アーム(72)と該第1のスイッチ要素(50)とが互いに構成され配置されている、ことを特徴とする、請求項3に記載のセンサモジュール。
【請求項5】
弾性要素(52)が前記第1と第2のスイッチ要素(50、48)の間に、該第1のスイッチ要素(50)に対して前記第2の操作位置に向けて力がかかるように予圧されて配置されていることを特徴とする、請求項3又は4に記載のセンサモジュール。
【請求項6】
前記第1のスイッチ要素(50)は、前記容器(30、32、34)と接触する接触部材(60)を有し、該接触部材は球形状であり、相応する軸受け内に回転可能に保持されていることを特徴とする、請求項2〜5のいずれか一に記載のセンサモジュール。
【請求項7】
前記温度センサ(66)が球形状の前記接触部材内に配置されていることを特徴とする、請求項6に記載のセンサモジュール。
【請求項8】
組織試料を処理するための組織処理装置であって、該装置は、
第1の処理媒体を収容するための、該第1の処理媒体の使用中はその作業位置にある第1の容器(30)と、請求項1〜7のいずれか一に記載の第1のセンサモジュール(38)とを有し、
該第1のセンサモジュールは、該第1の容器(30)がその作業位置にあるかどうかを検知するとともに、該第1の容器が作業位置にあるときは該第1の容器(30)の温度を測定するように配置されることを特徴とする、組織処理装置。
【請求項9】
もしも前記第1の容器(30)がその作業位置にあるときは、該第1の容器(30)が前記温度センサ(66)を含む前記第1のスイッチ要素(50)を押し、該第1のスイッチ要素(50)は第1の操作位置にある状態となり、
もしも前記第1の容器(30)がその作業位置にないときは、該第1の容器(30)が前記温度センサ(66)を含む前記第1のスイッチ要素(50)を押さず、該第1のスイッチ要素(50)は第2の操作位置にある状態となることを特徴とする、請求項8に記載の組織処理装置。
【請求項10】
第2の処理媒体を収容するための少なくとも1つの第2の容器(32)と、前記第1のセンサモジュール(38)と同じ構成であって該第2の容器(32)の位置と温度を測定可能なように配置されている第2のセンサモジュール(40)を含むことを特徴とする、請求項8又は9に記載の組織処理装置。
【請求項11】
複数の処理媒体を収容するための複数の容器(30、32、34)と、該容器(30、32、34)のそれぞれと関連付けられた複数のセンサモジュール(38、40、42)を含むことを特徴とする、請求項10に記載の組織処理装置。
【請求項12】
組織処理装置(20)の操作方法であって、
処理媒体を収容するための容器(30、32、34)をステーション(24、26、28)に挿入する工程と、
該ステーション(24、26、28)に挿入された該容器(30、32、34)が作業位置にあるかどうかをチェックする工程と、
同時に該容器(30、32、34)の温度を測定する工程と、を含む操作方法。
【図1】


【図2】
【図3】
【図4】
【図5】

【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−13699(P2012−13699A)
【公開日】平成24年1月19日(2012.1.19)
【国際特許分類】
【出願番号】特願2011−141429(P2011−141429)
【出願日】平成23年6月27日(2011.6.27)
【出願人】(500113648)ライカ ビオズュステムス ヌスロッホ ゲーエムベーハー (45)
【Fターム(参考)】
【公開日】平成24年1月19日(2012.1.19)
【国際特許分類】
【出願日】平成23年6月27日(2011.6.27)
【出願人】(500113648)ライカ ビオズュステムス ヌスロッホ ゲーエムベーハー (45)
【Fターム(参考)】
[ Back to top ]