
センサー体の抜き差し装置
【課題】バイオレメディエーションによる汚染土壌の浄化処理を効率的、且つ高精度で行うことができるようにしたセンサー体の抜き差し装置を提供する。
【解決手段】土壌浄化処理槽1の側部4に1又は2以上のセンサー導入口5を設け、また該側部4にはその一方向或いはその反対方向に第一シリンダー9により移動されるスライド板10を設け、更にスライド板10に設けられた取付板11他にはセンサー導入口5方向或いはその反対方向に摺動する第二シリンダー12と第三シリンダー13を並設するとともに、第二シリンダー12にはセンサー体15と第三シリンダー13にはセンサー導入口5の栓体16を取り付け、各シリンダーを順次稼働して、センサー体15のセンサー導入口5からの抜き取り、栓体16の装着と取り外し、センサー体15の挿着を行わせる。
【解決手段】土壌浄化処理槽1の側部4に1又は2以上のセンサー導入口5を設け、また該側部4にはその一方向或いはその反対方向に第一シリンダー9により移動されるスライド板10を設け、更にスライド板10に設けられた取付板11他にはセンサー導入口5方向或いはその反対方向に摺動する第二シリンダー12と第三シリンダー13を並設するとともに、第二シリンダー12にはセンサー体15と第三シリンダー13にはセンサー導入口5の栓体16を取り付け、各シリンダーを順次稼働して、センサー体15のセンサー導入口5からの抜き取り、栓体16の装着と取り外し、センサー体15の挿着を行わせる。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、例えば石油等により汚染された土壌を好気性の微生物を用いたバイオレメディエーションによる浄化装置に使用するセンサー体の抜き差し装置に関するものである。
【背景技術】
【0002】
石油汚染土壌の浄化法としては、汚染油を分離する溶剤抽出法及び熱脱着法や、汚染油を分解する焼却法等が挙げられているが、溶剤抽出法、熱脱着法では分離後の再処理工程が必要であり、焼却法や熱脱着法では、補助燃料を必要とする等の理由により処理コストが高くなり、また焼却法では燃焼により窒素酸化物が発生する等の問題点がある。
【0003】
これらの方法に対して、土壌中の微生物を用いた生物的処理法であるバイオレメディエーションは石油汚染土壌浄化において環境負荷の小さい浄化方法であることが認められ、数多くの提案がなされている(特開2001-212552,特開2003-10834)。
【0004】
このバイオレメディエーションは土壌中の好気性土壌微生物を用いた生物的処理法であるため、汚染土壌中に栄養成分の補給の他に、酸素、水分の補給を行う必要がある。
【0005】
このため、従来の方法では汚染土壌を建設機械で切り返したり、或いは攪拌装置を用いた攪拌作業により酸素補給を行ったり、更にその間に散水等により水分の補給を行うようにしていた。
【特許文献1】特開2001-212552,特開2003-10834
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかし、このバイオレメディエーションによる土壌浄化は土壌中の好気性土壌微生物を用いた生物的処理法であるため、土壌環境を適切に維持管理する必要があり、このため定期的に土壌の温度、土壌中の酸素濃度、水分量をモニタリングする必要がある。
【0007】
従来のバイオレメディエーションにおける土壌中の酸素濃度、水分量などの必要な条件のモニタリングは、必要に応じて人が測定器を用いたり、測定センサーを土壌の任意の部分に設置して測定が行われていた。
【0008】
しかし、酸素補給のために、建設機械を用いたり、汚染土壌の浄化装置を用いて攪拌作業を行う際には測定センサーを事前に取り外したり、攪拌作業が終われば再度土壌中に導入するなど手間の掛かる作業を行わなければならない。
【0009】
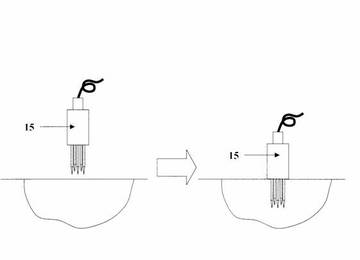
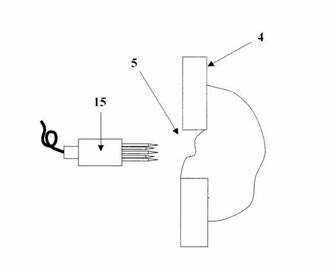
一方、土壌中の水分量測定に使用するセンサー体15は土壌の密度に大きな影響を受け、正確な測定をするためには、図7に示すように密度が均一に保たれている状態でセンサー体15を導入する必要がある。
【0010】
しかし、図8に示すようにバイオレメディエーションによる土壌浄化処理槽の側部4にセンサー導入口5を設ける場合、センサー体15が抜かれ、土壌が攪拌されると、導入口5から土壌が漏出し、この状態で測定部が全て土壌に埋まるようにセンサー体を導入した場合、土壌を固める力が加わり密度が変化してしまうため、正確な測定ができなくなる。
【0011】
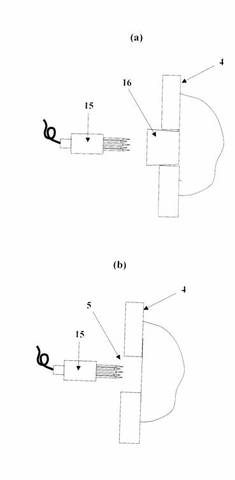
これを防ぐために、図9に示すようにセンサー体15が抜けている間センサー導入口5に栓体16を装着する必要があるが、この作業は多くの手間と労力を必要とする。
【0012】
そこで、この発明はバイオレメディエーションによる土壌浄化処理槽の側部にセンサー導入口を設ける場合のセンサー体の導入、センサー体の抜き出し、センサー体が抜き出されている間のセンサー導入口への栓体の装着作業を自動化して少ない人手で正確な測定を行うことを目的とするものである。
【課題を解決するための手段】
【0013】
この発明は、上記実情に鑑み、試料堆積槽側部の適当な深さに1又は2以上のセンサー導入口を設け、また該試料堆積槽側部にはその一方向或いはその反対方向に第一シリンダーにより移動されるスライド板を設け、更に該スライド板に設けられた取付板には上記センサー導入口方向或いはその反対方向に摺動する第二シリンダーと第三シリンダーを並設するとともに、該第二シリンダーにはセンサー体と第三シリンダーには上記センサー導入口の栓体を取り付けるようにしたセンサー体の抜き差し装置を提案するものである。
【0014】
以上の構成において、センサー体のセンサー導入口からの抜き取り、センサー導入口への栓体の装着作業を次に説明すると、所定の指定された信号が確認されると、第二シリンダーによりセンサーがセンサー導入口とは反対方向に移動させられ、センサー導入口からセンサーが抜き取られ、その後第一シリンダーによりスライド板がセンサー導入口と栓体が向き合う位置まで一方向に移動させられ、更に第三シリンダーにより栓体がセンサー導入口方向に移動させられ、センサー導入口に栓体が装着される。
【0015】
一方、センサー導入口からの栓体の取り外し、センサー導入口へのセンサー体の挿着作業を説明すると、所定の指定された信号が確認されると、第三シリンダーにより栓体がセンサー導入口とは反対方向に移動させられ、センサー導入口から栓体が取り外され、その後第一シリンダーによりスライド板がセンサー導入口とセンサー体が向き合う位置まで反対方向に移動させられ、更に第二シリンダーによりセンサー体がセンサー導入口方向に移動させられ、センサー導入口にセンサー体が挿着される。
【発明の効果】
【0016】
即ち、この発明ではバイオレメディエーションによる土壌浄化処理槽等の側部に設けたセンサー体のセンサー導入口からの抜き取り、センサー導入口への栓体の装着作業、逆にセンサー導入口からの栓体の取り外し、センサー導入口へのセンサー体の挿着作業を少ない人手で行わせることができる。
【0017】
また、この発明ではセンサー体が抜き出されている間のセンサー導入口に栓体を装着するようにしているため、センサー体が土壌密度等の影響を受けることなく正確な測定を行うことができる。
【0018】
なお、この発明においてセンサー体は測定試料の測定機器自体に限定されるものでなく、測定試料のサンプリング装置等も含まれる。
【0019】
なお、この発明ではバイオレメディエーションによる土壌浄化処理槽に限らず、センサーが抜き出されている間のセンサー導入口を開口しておくことが、測定に悪影響を及ぼすような試料測定乃測定至試料のサンプリングに使用することができる。
【0020】
また、この発明は攪拌装置を備えたバイオレメディエーションによる土壌浄化処理槽に使用できる。
【0021】
更に、この発明に係るセンサー体の抜き差し装置は本願発明者らが先に提案した汚染土壌の堆積槽の両側に沿って施設された軌道と、該軌道上を走行する駆動体と、多数の掻き揚げ板を設けたコンベアベルト体と、上記駆動体上に設けられた上記コンベアベルト体を駆動体の走行方向に対して所定角度傾斜させる支持体で構成される攪拌装置を備えた汚染土壌の浄化装置(特願2005-219036)と組み合わせて使用することにより、測定結果をモニターしながらバイオレメディエーションによる汚染土壌の高効率の浄化処理が可能となる。
【発明を実施するための最良の形態】
【0022】
汚染土壌の堆積槽の両側に沿って施設された軌道と、該軌道上を走行する駆動体と、多数の掻き揚げ板を設けたコンベアベルト体と、上記駆動体上に設けられた上記コンベアベルト体を駆動体の走行方向に対して所定角度傾斜させる支持体で構成される攪拌装置を備えた汚染土壌の浄化装置の堆積槽の側部の適当な深さに1又は2以上のセンサー導入口を設け、また該試料堆積槽側部にはその一方向或いはその反対方向に第一シリンダーにより移動されるスライド板を設け、更に該スライド板に設けられた取付板には上記センサー導入口方向或いはその反対方向に摺動する第二シリンダーと第三シリンダーを並設するとともに、該第二シリンダーにはセンサー体と第三シリンダーには上記センサー導入口の栓体を取り付けるようにしたセンサー体の抜き差し装置。
【実施例1】
【0023】
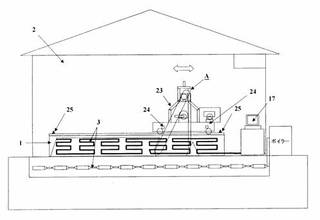
以下、この発明を図示の実施例に基づいて詳細に説明すると、1は上方を開放して攪拌装置Aを備えた横長直方状の堆積槽で、堆積槽1は全体を恒温室2内に設置すると共に、その底部及び側部には温水パイプ等で構成される暖房設備3を設置される。
【0024】
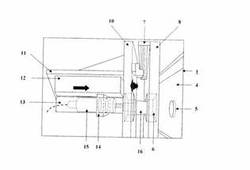
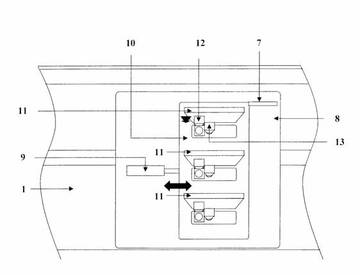
堆積槽1の側部4における適当な深さの下段、中段、上段にセンサー導入口5,…を穿設し、更に堆積槽1の側部4にはセンサー導入口5,…の対応する位置に窓6,…を設け、その上部には堆積槽1の側部4の横方向に沿ってスライドレール7が設けられた固定板8を取り付ける。
【0025】
固定板8には第一エアシリンダー9の駆動によりスライドレール7上をスライドするスライド板10が設けられる。
【0026】
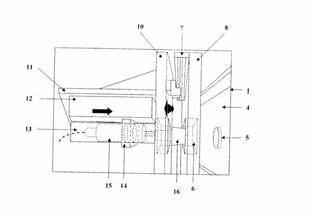
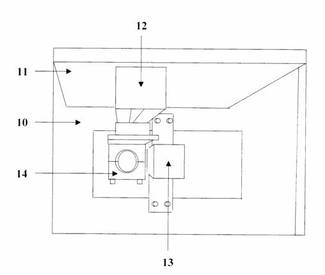
スライド板10の下段、中段、上段にはそれぞれ取付板11,…が突設され、取付板11には第二エアシリンダー12,12と第三エアシリンダー13が並設され、第二エアシリンダー12にはホルダー14を介してセンサー体15が取り付けられ、第三エアシリンダー13には栓体16が取り付けられ、センサー15は第二エアシリンダー12によりセンサー導入口5方向或いはその反対方向に移動させられ、栓体16は第三エアシリンダー13によりセンサー導入口5方向或いはその反対方向に移動させられる。
【0027】
また、スライド板10は第一エアシリンダー9によりセンサー体15或いは栓体16がセンサー導入口5の対応する位置に移動させられる。
【0028】
17は、モニター装置であり、攪拌装置Aはモニター装置17に表示された指定された信号を確認することにより稼働し、第一エアシリンダー9、第二エアシリンダー12、第三エアシリンダー13は攪拌装置Aが設定された稼働状態にあることを確認して稼働させる。
【0029】
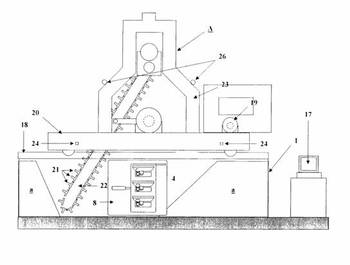
次に、この実施例における堆積槽1に用いられた攪拌装置Aについて説明すると、攪拌装置Aは堆積槽1の側部4,4上に施設されたレール18,18と、レール18,18上を駆動モータ19により走行する駆動体20と、多数の掻き揚げ板21を設けたコンベアベルト体22と、駆動体20上に設けられたコンベアベルト体22を駆動体20の走行方向に対して所定角度傾斜させる支持体23で構成される。
【0030】
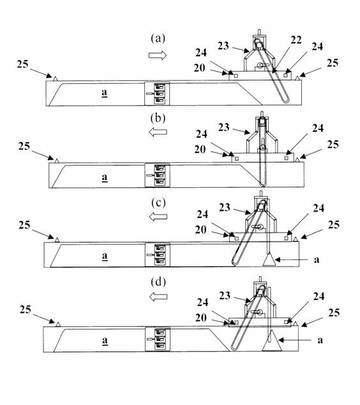
なお、コンベアベル体22は傾斜方向の切り替わる機構が具備され、モニター装置17に表示された指定された信号を確認することにより、堆積層aに対して傾斜方向が切り替わるようにしてある(図3(a))。
【0031】
また、駆動体20には走行方向の切り替え機構が具備され、駆動体20のセンサー24,24がセンサー導入口5から所定の位置に設けられたストッパー25,25を感知すると、モニター装置17に指定された信号を表示させるとともに、駆動体20の走行方向を切り替えるようにしてある。
【0032】
また、駆動体20の走行方向が切り替わり、コンベアベルト体22の傾斜方向が切り替わると、コンベアベルト体22の回動方向も切り替えられるようにしてある。
【0033】
この装置においてバイオレメディエーションによる石油汚染土壌の浄化処理は堆積槽1には微生物の活動に必要な窒素、リン等の栄養分を含む石油汚染土壌を畝状に堆積し、この堆積層aに対してコンベアベルト体22を回動させながら駆動体20を走行させると、堆積層aの土壌は掻き揚げ板21で掻き揚げられ、駆動体20の進行方向の逆方向に落下して堆積される。同時に、この実施例では駆動体20の進行方向の逆方向の散水口26より散水して落下する土壌に対して散水することにより行われる(図2参照)。
【0034】
駆動体20を一方向に走行させ、駆動体20のセンサー24,24がセンサー導入口5から所定の位置に設けられたストッパー25,25を感知すると、駆動体20は停止する。(図3a)、指定された信号により稼働する際は、コンベアベルト体20を反転方向に回転させながらコンベアベルト体22の傾斜を切り替え(図3b)、駆動体20の進行方向の逆方向に堆積された堆積層a側に傾斜させ(図3c)、コンベアベルト体22を反対方向に回動させながら駆動体20を反対方向に走行させる(図3d)。
【0035】
一方、駆動体20の走行中堆積槽1の側部4に設けられたセンサー導入口5には栓体16が装着され、センサー導入口5より土壌が漏れ出ないようにしてあるが、駆動体20のセンサー24,24がレール18,18の両端部に設けられたストッパー25,25を感知すると、駆動体20の走行を停止する。
【0036】
また、駆動体20のセンサー24,24がレール18、18の両端部に設けられたストッパー25,25を感知すると、第三エアシリンダー13、第一エアシリンダー9、第二エアシリンダー12を順次稼働させてセンサー導入口5へのセンサー体15の挿着作業を自動的に行わせるようにしてある。
【0037】
具体的には、第三エアシリンダー13により栓体16がセンサー導入口5とは反対方向に移動させられ、センサー導入口5から栓体16が取り外され、その後第一エアシリンダー9によりスライド板10がセンサー導入口5とセンサー体15が向き合う位置まで一方向に移動させられ、更に第二エアシリンダー12によりセンサー体15がセンサー導入口5方向に移動させられ、センサー導入口5にセンサー体15が挿入され、土壌中の酸素濃度、水分量等を測定し、その結果をモニター装置17に表示させる。
【0038】
従って、この実施例では土壌中の酸素濃度、水分量をモニター装置17の表示で確認しながらバイオレメディエーションによる汚染土壌の高効率の浄化処理が可能となる。
【0039】
また、この実施例では駆動体20の走行中センサー導入口5に栓体16が装着されているため、センサー導入口5から土壌が漏れ出すことなく、このためセンサー体15が土壌密度等の影響を受けることなく正確な測定を行うことができる。
【0040】
なお、攪拌装置はこの実施例に限定されるものでなく、ショベルカー等の土木機械或いは手作業による攪拌操作についても使用できる。
【0041】
また、この実施例では堆積槽側部4の下段、中段、上段にそれぞれ一カ所のセンサー導入口5を設ける例について説明したが、測定精度を高めるために同じ段に二カ所以上のセンサー導入口を設けるようにしてもよく、更に深度方向についても4段以上設けるようにしてもよい。
【0042】
更に、この実施例では攪拌装置Aのストッパーを感知してセンサー抜き差し装置が稼働する例について説明したが、攪拌装置Aの位置を認識して稼働するようにしてもよい。
【0043】
また、この発明に係わるセンサー体の抜き差し装置は、試料の測定用に限らず、測定試料のサンプリング装置、例えばガスのサンプリング用の配管などに適用することができる。
【産業上の利用可能性】
【0044】
以上要するに、この発明では例えばバイオレメディエーションによる汚染土壌の浄化処理を効率的、且つ高精度で行うことができるようにしたセンサー体の抜き差し装置を提供することができる。
【図面の簡単な説明】
【0045】
【図1】この実施例に使用するバイオレメデエーションによる石油汚染土壌の浄化処理装置の概略説明図
【図2】同上の要部側面図
【図3】同上の装置による汚染土壌の浄化処理操作を示す図で、(a)駆動体を一方向に走行させてレールの一端に到達した状態、(b)コンベアベルト体の傾斜方向を切り替える状態、(c)コンベアベルト体を反対方向に傾斜させた状態、(d)駆動体を反対方向に走行させる状態
【図4】上記装置に取り付けられたこの発明に係る測定装置の正面図
【図5】同上の要部を拡大した側面図
【図6】同上の正面図
【図7】土壌への理想的なセンサー体の挿着状態を示す図
【図8】従来の測定装置におけるセンサー導入口からセンサー体が抜かれた状態を示す図
【図9】センサー体が抜けている間センサー導入口に栓体を装着した状態(a)、栓体を取り外してセンサー体をセンサー導入口に挿着する際の状態を示す図
【符号の説明】
【0046】
1は堆積槽
2は恒温室
3は暖房設備
4は堆積槽の側部
5はセンサー導入口
6は窓
7はスライドレール
8は固定板
9は第一エアシリンダー
10はスライド板
11,…は取付板
12は第二エアシリンダー
13は第三エアシリンダー
14はホルダー
15はセンサー体
16は栓体
17はモニター装置
18,18はレール
19は駆動モータ
20は駆動体
21は掻き揚げ板
22はコンベアベルト体
23は支持体
24,24は駆動体のセンサー
25,25はストッパー
26,26は散水口
Aは攪拌装置
aは堆積層
【技術分野】
【0001】
この発明は、例えば石油等により汚染された土壌を好気性の微生物を用いたバイオレメディエーションによる浄化装置に使用するセンサー体の抜き差し装置に関するものである。
【背景技術】
【0002】
石油汚染土壌の浄化法としては、汚染油を分離する溶剤抽出法及び熱脱着法や、汚染油を分解する焼却法等が挙げられているが、溶剤抽出法、熱脱着法では分離後の再処理工程が必要であり、焼却法や熱脱着法では、補助燃料を必要とする等の理由により処理コストが高くなり、また焼却法では燃焼により窒素酸化物が発生する等の問題点がある。
【0003】
これらの方法に対して、土壌中の微生物を用いた生物的処理法であるバイオレメディエーションは石油汚染土壌浄化において環境負荷の小さい浄化方法であることが認められ、数多くの提案がなされている(特開2001-212552,特開2003-10834)。
【0004】
このバイオレメディエーションは土壌中の好気性土壌微生物を用いた生物的処理法であるため、汚染土壌中に栄養成分の補給の他に、酸素、水分の補給を行う必要がある。
【0005】
このため、従来の方法では汚染土壌を建設機械で切り返したり、或いは攪拌装置を用いた攪拌作業により酸素補給を行ったり、更にその間に散水等により水分の補給を行うようにしていた。
【特許文献1】特開2001-212552,特開2003-10834
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかし、このバイオレメディエーションによる土壌浄化は土壌中の好気性土壌微生物を用いた生物的処理法であるため、土壌環境を適切に維持管理する必要があり、このため定期的に土壌の温度、土壌中の酸素濃度、水分量をモニタリングする必要がある。
【0007】
従来のバイオレメディエーションにおける土壌中の酸素濃度、水分量などの必要な条件のモニタリングは、必要に応じて人が測定器を用いたり、測定センサーを土壌の任意の部分に設置して測定が行われていた。
【0008】
しかし、酸素補給のために、建設機械を用いたり、汚染土壌の浄化装置を用いて攪拌作業を行う際には測定センサーを事前に取り外したり、攪拌作業が終われば再度土壌中に導入するなど手間の掛かる作業を行わなければならない。
【0009】
一方、土壌中の水分量測定に使用するセンサー体15は土壌の密度に大きな影響を受け、正確な測定をするためには、図7に示すように密度が均一に保たれている状態でセンサー体15を導入する必要がある。
【0010】
しかし、図8に示すようにバイオレメディエーションによる土壌浄化処理槽の側部4にセンサー導入口5を設ける場合、センサー体15が抜かれ、土壌が攪拌されると、導入口5から土壌が漏出し、この状態で測定部が全て土壌に埋まるようにセンサー体を導入した場合、土壌を固める力が加わり密度が変化してしまうため、正確な測定ができなくなる。
【0011】
これを防ぐために、図9に示すようにセンサー体15が抜けている間センサー導入口5に栓体16を装着する必要があるが、この作業は多くの手間と労力を必要とする。
【0012】
そこで、この発明はバイオレメディエーションによる土壌浄化処理槽の側部にセンサー導入口を設ける場合のセンサー体の導入、センサー体の抜き出し、センサー体が抜き出されている間のセンサー導入口への栓体の装着作業を自動化して少ない人手で正確な測定を行うことを目的とするものである。
【課題を解決するための手段】
【0013】
この発明は、上記実情に鑑み、試料堆積槽側部の適当な深さに1又は2以上のセンサー導入口を設け、また該試料堆積槽側部にはその一方向或いはその反対方向に第一シリンダーにより移動されるスライド板を設け、更に該スライド板に設けられた取付板には上記センサー導入口方向或いはその反対方向に摺動する第二シリンダーと第三シリンダーを並設するとともに、該第二シリンダーにはセンサー体と第三シリンダーには上記センサー導入口の栓体を取り付けるようにしたセンサー体の抜き差し装置を提案するものである。
【0014】
以上の構成において、センサー体のセンサー導入口からの抜き取り、センサー導入口への栓体の装着作業を次に説明すると、所定の指定された信号が確認されると、第二シリンダーによりセンサーがセンサー導入口とは反対方向に移動させられ、センサー導入口からセンサーが抜き取られ、その後第一シリンダーによりスライド板がセンサー導入口と栓体が向き合う位置まで一方向に移動させられ、更に第三シリンダーにより栓体がセンサー導入口方向に移動させられ、センサー導入口に栓体が装着される。
【0015】
一方、センサー導入口からの栓体の取り外し、センサー導入口へのセンサー体の挿着作業を説明すると、所定の指定された信号が確認されると、第三シリンダーにより栓体がセンサー導入口とは反対方向に移動させられ、センサー導入口から栓体が取り外され、その後第一シリンダーによりスライド板がセンサー導入口とセンサー体が向き合う位置まで反対方向に移動させられ、更に第二シリンダーによりセンサー体がセンサー導入口方向に移動させられ、センサー導入口にセンサー体が挿着される。
【発明の効果】
【0016】
即ち、この発明ではバイオレメディエーションによる土壌浄化処理槽等の側部に設けたセンサー体のセンサー導入口からの抜き取り、センサー導入口への栓体の装着作業、逆にセンサー導入口からの栓体の取り外し、センサー導入口へのセンサー体の挿着作業を少ない人手で行わせることができる。
【0017】
また、この発明ではセンサー体が抜き出されている間のセンサー導入口に栓体を装着するようにしているため、センサー体が土壌密度等の影響を受けることなく正確な測定を行うことができる。
【0018】
なお、この発明においてセンサー体は測定試料の測定機器自体に限定されるものでなく、測定試料のサンプリング装置等も含まれる。
【0019】
なお、この発明ではバイオレメディエーションによる土壌浄化処理槽に限らず、センサーが抜き出されている間のセンサー導入口を開口しておくことが、測定に悪影響を及ぼすような試料測定乃測定至試料のサンプリングに使用することができる。
【0020】
また、この発明は攪拌装置を備えたバイオレメディエーションによる土壌浄化処理槽に使用できる。
【0021】
更に、この発明に係るセンサー体の抜き差し装置は本願発明者らが先に提案した汚染土壌の堆積槽の両側に沿って施設された軌道と、該軌道上を走行する駆動体と、多数の掻き揚げ板を設けたコンベアベルト体と、上記駆動体上に設けられた上記コンベアベルト体を駆動体の走行方向に対して所定角度傾斜させる支持体で構成される攪拌装置を備えた汚染土壌の浄化装置(特願2005-219036)と組み合わせて使用することにより、測定結果をモニターしながらバイオレメディエーションによる汚染土壌の高効率の浄化処理が可能となる。
【発明を実施するための最良の形態】
【0022】
汚染土壌の堆積槽の両側に沿って施設された軌道と、該軌道上を走行する駆動体と、多数の掻き揚げ板を設けたコンベアベルト体と、上記駆動体上に設けられた上記コンベアベルト体を駆動体の走行方向に対して所定角度傾斜させる支持体で構成される攪拌装置を備えた汚染土壌の浄化装置の堆積槽の側部の適当な深さに1又は2以上のセンサー導入口を設け、また該試料堆積槽側部にはその一方向或いはその反対方向に第一シリンダーにより移動されるスライド板を設け、更に該スライド板に設けられた取付板には上記センサー導入口方向或いはその反対方向に摺動する第二シリンダーと第三シリンダーを並設するとともに、該第二シリンダーにはセンサー体と第三シリンダーには上記センサー導入口の栓体を取り付けるようにしたセンサー体の抜き差し装置。
【実施例1】
【0023】
以下、この発明を図示の実施例に基づいて詳細に説明すると、1は上方を開放して攪拌装置Aを備えた横長直方状の堆積槽で、堆積槽1は全体を恒温室2内に設置すると共に、その底部及び側部には温水パイプ等で構成される暖房設備3を設置される。
【0024】
堆積槽1の側部4における適当な深さの下段、中段、上段にセンサー導入口5,…を穿設し、更に堆積槽1の側部4にはセンサー導入口5,…の対応する位置に窓6,…を設け、その上部には堆積槽1の側部4の横方向に沿ってスライドレール7が設けられた固定板8を取り付ける。
【0025】
固定板8には第一エアシリンダー9の駆動によりスライドレール7上をスライドするスライド板10が設けられる。
【0026】
スライド板10の下段、中段、上段にはそれぞれ取付板11,…が突設され、取付板11には第二エアシリンダー12,12と第三エアシリンダー13が並設され、第二エアシリンダー12にはホルダー14を介してセンサー体15が取り付けられ、第三エアシリンダー13には栓体16が取り付けられ、センサー15は第二エアシリンダー12によりセンサー導入口5方向或いはその反対方向に移動させられ、栓体16は第三エアシリンダー13によりセンサー導入口5方向或いはその反対方向に移動させられる。
【0027】
また、スライド板10は第一エアシリンダー9によりセンサー体15或いは栓体16がセンサー導入口5の対応する位置に移動させられる。
【0028】
17は、モニター装置であり、攪拌装置Aはモニター装置17に表示された指定された信号を確認することにより稼働し、第一エアシリンダー9、第二エアシリンダー12、第三エアシリンダー13は攪拌装置Aが設定された稼働状態にあることを確認して稼働させる。
【0029】
次に、この実施例における堆積槽1に用いられた攪拌装置Aについて説明すると、攪拌装置Aは堆積槽1の側部4,4上に施設されたレール18,18と、レール18,18上を駆動モータ19により走行する駆動体20と、多数の掻き揚げ板21を設けたコンベアベルト体22と、駆動体20上に設けられたコンベアベルト体22を駆動体20の走行方向に対して所定角度傾斜させる支持体23で構成される。
【0030】
なお、コンベアベル体22は傾斜方向の切り替わる機構が具備され、モニター装置17に表示された指定された信号を確認することにより、堆積層aに対して傾斜方向が切り替わるようにしてある(図3(a))。
【0031】
また、駆動体20には走行方向の切り替え機構が具備され、駆動体20のセンサー24,24がセンサー導入口5から所定の位置に設けられたストッパー25,25を感知すると、モニター装置17に指定された信号を表示させるとともに、駆動体20の走行方向を切り替えるようにしてある。
【0032】
また、駆動体20の走行方向が切り替わり、コンベアベルト体22の傾斜方向が切り替わると、コンベアベルト体22の回動方向も切り替えられるようにしてある。
【0033】
この装置においてバイオレメディエーションによる石油汚染土壌の浄化処理は堆積槽1には微生物の活動に必要な窒素、リン等の栄養分を含む石油汚染土壌を畝状に堆積し、この堆積層aに対してコンベアベルト体22を回動させながら駆動体20を走行させると、堆積層aの土壌は掻き揚げ板21で掻き揚げられ、駆動体20の進行方向の逆方向に落下して堆積される。同時に、この実施例では駆動体20の進行方向の逆方向の散水口26より散水して落下する土壌に対して散水することにより行われる(図2参照)。
【0034】
駆動体20を一方向に走行させ、駆動体20のセンサー24,24がセンサー導入口5から所定の位置に設けられたストッパー25,25を感知すると、駆動体20は停止する。(図3a)、指定された信号により稼働する際は、コンベアベルト体20を反転方向に回転させながらコンベアベルト体22の傾斜を切り替え(図3b)、駆動体20の進行方向の逆方向に堆積された堆積層a側に傾斜させ(図3c)、コンベアベルト体22を反対方向に回動させながら駆動体20を反対方向に走行させる(図3d)。
【0035】
一方、駆動体20の走行中堆積槽1の側部4に設けられたセンサー導入口5には栓体16が装着され、センサー導入口5より土壌が漏れ出ないようにしてあるが、駆動体20のセンサー24,24がレール18,18の両端部に設けられたストッパー25,25を感知すると、駆動体20の走行を停止する。
【0036】
また、駆動体20のセンサー24,24がレール18、18の両端部に設けられたストッパー25,25を感知すると、第三エアシリンダー13、第一エアシリンダー9、第二エアシリンダー12を順次稼働させてセンサー導入口5へのセンサー体15の挿着作業を自動的に行わせるようにしてある。
【0037】
具体的には、第三エアシリンダー13により栓体16がセンサー導入口5とは反対方向に移動させられ、センサー導入口5から栓体16が取り外され、その後第一エアシリンダー9によりスライド板10がセンサー導入口5とセンサー体15が向き合う位置まで一方向に移動させられ、更に第二エアシリンダー12によりセンサー体15がセンサー導入口5方向に移動させられ、センサー導入口5にセンサー体15が挿入され、土壌中の酸素濃度、水分量等を測定し、その結果をモニター装置17に表示させる。
【0038】
従って、この実施例では土壌中の酸素濃度、水分量をモニター装置17の表示で確認しながらバイオレメディエーションによる汚染土壌の高効率の浄化処理が可能となる。
【0039】
また、この実施例では駆動体20の走行中センサー導入口5に栓体16が装着されているため、センサー導入口5から土壌が漏れ出すことなく、このためセンサー体15が土壌密度等の影響を受けることなく正確な測定を行うことができる。
【0040】
なお、攪拌装置はこの実施例に限定されるものでなく、ショベルカー等の土木機械或いは手作業による攪拌操作についても使用できる。
【0041】
また、この実施例では堆積槽側部4の下段、中段、上段にそれぞれ一カ所のセンサー導入口5を設ける例について説明したが、測定精度を高めるために同じ段に二カ所以上のセンサー導入口を設けるようにしてもよく、更に深度方向についても4段以上設けるようにしてもよい。
【0042】
更に、この実施例では攪拌装置Aのストッパーを感知してセンサー抜き差し装置が稼働する例について説明したが、攪拌装置Aの位置を認識して稼働するようにしてもよい。
【0043】
また、この発明に係わるセンサー体の抜き差し装置は、試料の測定用に限らず、測定試料のサンプリング装置、例えばガスのサンプリング用の配管などに適用することができる。
【産業上の利用可能性】
【0044】
以上要するに、この発明では例えばバイオレメディエーションによる汚染土壌の浄化処理を効率的、且つ高精度で行うことができるようにしたセンサー体の抜き差し装置を提供することができる。
【図面の簡単な説明】
【0045】
【図1】この実施例に使用するバイオレメデエーションによる石油汚染土壌の浄化処理装置の概略説明図
【図2】同上の要部側面図
【図3】同上の装置による汚染土壌の浄化処理操作を示す図で、(a)駆動体を一方向に走行させてレールの一端に到達した状態、(b)コンベアベルト体の傾斜方向を切り替える状態、(c)コンベアベルト体を反対方向に傾斜させた状態、(d)駆動体を反対方向に走行させる状態
【図4】上記装置に取り付けられたこの発明に係る測定装置の正面図
【図5】同上の要部を拡大した側面図
【図6】同上の正面図
【図7】土壌への理想的なセンサー体の挿着状態を示す図
【図8】従来の測定装置におけるセンサー導入口からセンサー体が抜かれた状態を示す図
【図9】センサー体が抜けている間センサー導入口に栓体を装着した状態(a)、栓体を取り外してセンサー体をセンサー導入口に挿着する際の状態を示す図
【符号の説明】
【0046】
1は堆積槽
2は恒温室
3は暖房設備
4は堆積槽の側部
5はセンサー導入口
6は窓
7はスライドレール
8は固定板
9は第一エアシリンダー
10はスライド板
11,…は取付板
12は第二エアシリンダー
13は第三エアシリンダー
14はホルダー
15はセンサー体
16は栓体
17はモニター装置
18,18はレール
19は駆動モータ
20は駆動体
21は掻き揚げ板
22はコンベアベルト体
23は支持体
24,24は駆動体のセンサー
25,25はストッパー
26,26は散水口
Aは攪拌装置
aは堆積層
【特許請求の範囲】
【請求項1】
試料堆積槽側部の適当な深さに1又は2以上のセンサー導入口を設け、また該試料堆積槽側部にはその一方向或いはその反対方向に第一シリンダーにより移動されるスライド板を設け、更に該スライド板に設けられた取付板には上記センサー導入口方向或いはその反対方向に摺動する第二シリンダーと第三シリンダーを並設するとともに、該第二シリンダーにはセンサー体と第三シリンダーには上記センサー導入口の栓体を取り付け、上記各シリンダーを順次稼働してセンサー体のセンサー導入口からの抜き取り、センサー導入口への栓体の装着作業とセンサー導入口からの栓体の取り外し、センサー導入口へのセンサー体の挿着作業を行わせるようにしたことを特徴とするセンサー体の抜き差し装置。
【請求項2】
センサー体が測定試料のサンプリング装置である請求項1記載の装置。
【請求項3】
試料堆積槽がバイオレメディエーションによる土壌浄化処理槽である請求項1記載の装置。
【請求項4】
バイオレメディエーションによる土壌浄化処理槽が攪拌装置を備えた土壌浄化処理槽である請求項3記載の装置。
【請求項5】
攪拌装置が堆積槽の両側に沿って施設された軌道と、該軌道上を走行する駆動体と、多数の掻き揚げ板を設けたコンベアベルト体と、上記駆動体上に設けられた上記コンベアベルト体を駆動体の走行方向に対して所定角度傾斜させる支持体で構成される請求項4記載の装置。
【請求項1】
試料堆積槽側部の適当な深さに1又は2以上のセンサー導入口を設け、また該試料堆積槽側部にはその一方向或いはその反対方向に第一シリンダーにより移動されるスライド板を設け、更に該スライド板に設けられた取付板には上記センサー導入口方向或いはその反対方向に摺動する第二シリンダーと第三シリンダーを並設するとともに、該第二シリンダーにはセンサー体と第三シリンダーには上記センサー導入口の栓体を取り付け、上記各シリンダーを順次稼働してセンサー体のセンサー導入口からの抜き取り、センサー導入口への栓体の装着作業とセンサー導入口からの栓体の取り外し、センサー導入口へのセンサー体の挿着作業を行わせるようにしたことを特徴とするセンサー体の抜き差し装置。
【請求項2】
センサー体が測定試料のサンプリング装置である請求項1記載の装置。
【請求項3】
試料堆積槽がバイオレメディエーションによる土壌浄化処理槽である請求項1記載の装置。
【請求項4】
バイオレメディエーションによる土壌浄化処理槽が攪拌装置を備えた土壌浄化処理槽である請求項3記載の装置。
【請求項5】
攪拌装置が堆積槽の両側に沿って施設された軌道と、該軌道上を走行する駆動体と、多数の掻き揚げ板を設けたコンベアベルト体と、上記駆動体上に設けられた上記コンベアベルト体を駆動体の走行方向に対して所定角度傾斜させる支持体で構成される請求項4記載の装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2007−260577(P2007−260577A)
【公開日】平成19年10月11日(2007.10.11)
【国際特許分類】
【出願番号】特願2006−90082(P2006−90082)
【出願日】平成18年3月29日(2006.3.29)
【出願人】(000186913)昭和シェル石油株式会社 (322)
【Fターム(参考)】
【公開日】平成19年10月11日(2007.10.11)
【国際特許分類】
【出願日】平成18年3月29日(2006.3.29)
【出願人】(000186913)昭和シェル石油株式会社 (322)
【Fターム(参考)】
[ Back to top ]