
センサ制御方法およびセンサシステム
【課題】 センサシステムで,消費電力を低減させつつ安全性を維持した構造物のモニタリングを可能とすることを目的とする。
【解決手段】 センサシステムのGMS2が揺れ信号を検出すると,揺れ信号受信部11は揺れ信号を受信し,揺れ信号判定部12は揺れ信号の強度を判定して,起動させるLMS3を決定する。制御信号送信部15は,決定したLMS3へ起動信号を送信する。起動信号を受信したLMS3は,損傷検知処理を起動して,損傷の有無,進行のモニタリングを行う。
【解決手段】 センサシステムのGMS2が揺れ信号を検出すると,揺れ信号受信部11は揺れ信号を受信し,揺れ信号判定部12は揺れ信号の強度を判定して,起動させるLMS3を決定する。制御信号送信部15は,決定したLMS3へ起動信号を送信する。起動信号を受信したLMS3は,損傷検知処理を起動して,損傷の有無,進行のモニタリングを行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は,構造モニタリングに用いられるセンシングデバイス(センサ)の制御技術に関する。
【背景技術】
【0002】
地震などによって大規模な構造物が受ける被害を検知するために,複数のセンサを対象となる構造物に設置して損傷や歪みなどをモニタリングするセンサシステムが知られている。
【0003】
センサシステムには,構造物全体の状態を把握するためのグローバル・モニタリング・センサ(GMS)と構造物の局所的な状態を把握するための多数のローカル・モニタリング・センサ(LMS)を構造物に設置して,構造物の健全性をモニタリングするものがある。
【0004】
このようなセンサシステムは,上記の一般的なセンサシステムと同様,各センサが各々備えるバッテリを駆動用動力源とし,電力供給を受けて駆動する。そのため,バッテリの交換等のメンテナンスが必要である。しかし,構造物に設置されるセンサ数が多くなると,バッテリ交換に要する工数や費用が膨大なものになってしまう。そのため,可能な限りバッテリの寿命を長く維持させるためにセンサの制御方法が必要となっていた。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2004−1703975号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
多数のセンサを用いるセンサシステムで,バッテリを長持ちさせるために,各センサを制御しているCPU,通信モジュールなどを一定の期間中スリープさせることによって消費電力を抑制する手法が考えられる。
【0007】
しかし,地震などの発生を予測することは困難であり,センサを常にセンシング可能な状態すなわち稼働状態にさせておく必要があった。また,地震が発生した場合にも,構造物が損傷を受けるとは限らないが,構造物が損傷を受けた部分では,その損傷が進行しているかどうか,すなわち損傷の程度が拡大しているかどうかをモニタリングし続けることが必要であった。
【0008】
したがって,センサを未センシングであるとしてスリープ状態にさせてしまうと,その間に発生・進行する損傷を検出できず,センサシステム全体のモニタリング精度が低下するおそれがあった。一方で,常に全てのセンサを稼働させていると,損傷が生じていないような箇所のセンサも稼働させることになり,電力消費に無駄が生じるという問題があった。
【0009】
本発明の目的は,かかる問題に鑑みてなされたものであり,モニタリング対象の構造物の損傷の有無やその進行をモニタリングするセンサの稼働状態を制御して,必要最小限のセンサでモニタリングする制御方法およびセンサシステムを提供することである。
【課題を解決するための手段】
【0010】
本発明において開示されるセンサ制御方法は,対象物の揺れ信号を検知するグローバル・モニタリング・センサと,該対象物の局所で生じる損傷を示す損傷信号を検知する複数のローカル・モニタリング・センサと,制御部とを備えるセンサシステムが実行するセンサ制御方法であって,1)グローバル・モニタリング・センサが検出した揺れ信号を制御部へ送信し,2)前記制御部が前記揺れ信号を受信し,各ローカル・モニタリング・センサへ起動信号を送信し,3)前記ローカル・モニタリング・センサ各々が,前記起動信号を受信して損傷検知処理を起動するものである。
【発明の効果】
【0011】
上記したセンサ制御方法によれば,センサシステムの各センサの稼働時間を効果的に制御するため,モニタリング精度を低下させることなくセンサシステムの電力消費量を低減させることができる。
【図面の簡単な説明】
【0012】
【図1】一実施例におけるセンサシステムの各センサの配置例を示す図である。
【図2】一実施例における制御装置の構成例を示す図である。
【図3】一実施例におけるGMS2の構成例を示す図である。
【図4】一実施例におけるGMS2の構成例を示す図である。
【図5】揺れ信号にもとづくLMS3の駆動制御を説明するための図である。
【図6】揺れ信号による判定例を示す図である。
【図7】揺れ信号判定部12が備えるテーブル例を示す図である。
【図8】図7に示すテーブルに設定された揺れ信号の大きさと起動対象との関係を示す図である。
【図9】スリープ状態へ戻す制御例を示す図である。
【図10】LMS稼働状態の遷移例を示す図である。
【発明を実施するための形態】
【0013】
以下,本発明の一態様として開示するセンサ制御方法および制御装置を実施するセンサシステムを説明する。
【0014】
センサシステムは,構造物の健全性をモニタリングするシステムであって,制御装置1,グローバル・モニタリング・センサ(GMS)2,およびローカル・モニタリング・センサ(LMS)3を備える。
【0015】
センサシステムの制御装置1は,GMS2が検知した揺れにもとづいてLMS3の駆動を制御する装置である。制御装置1は,CPU,主記憶部および補助記憶部を備えるコンピュータ,または,専用ハードウェアによって実施される。また,制御装置1は,コンピュータで実施される場合に,ハードウェアと予め格納されたプログラムとによって上記の各処理部を実施する。なお,プログラムは,コンピュータで読み取り可能な記録媒体に記録しておくことができる。
【0016】
GMS2は,モニタリング対象の構造物全体の状態を把握するためのセンサである。GMS2は,地震などによる構造物全体の揺れを検知するものであり,たとえば加速度センサで実施される。
【0017】
LMS3は,構造物の局所的な状態を把握するためのセンサである。LMS3は,局所的な範囲を監視して,亀裂,歪みなどの発生や,それら亀裂,歪みの拡大などをモニタリングするものであり,たとえば歪みセンサやAE(アコースティック・エミッション)センサなどで実施される。
【0018】
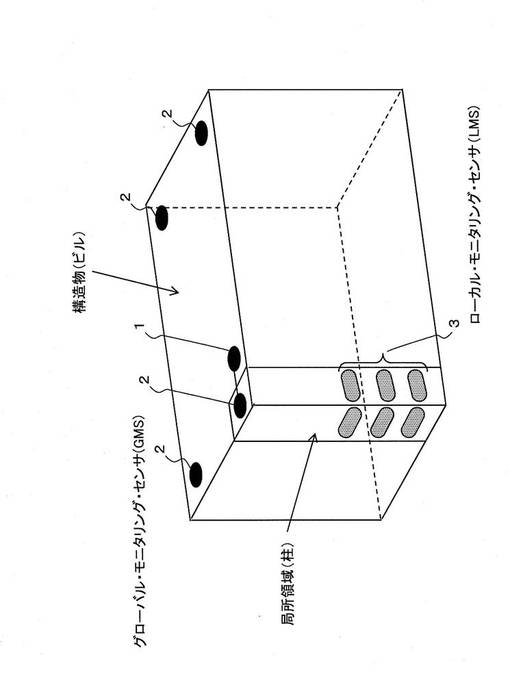
図1は,一実施例におけるセンサシステムの各センサの配置例を示す図である。
【0019】
本実施例のセンサシステムは,役割が異なるセンサを設置する。図1では,モニタリング対象が構造物(例えばビル)などである場合に,センサシステムの各センサの設置例を簡略的に図示している。ビル全体の動きを検知するため,GMS2は,ビルに対して広い範囲,たとえばビルの四隅に設置される。LMS3は,局所的な部分,たとえばビルの柱や梁,壁面などの損傷を検知するため,狭い領域に多数のセンサが設置される。図1に示すように,ビルの柱の一定の領域に,多数のLMS3が配置される。
【0020】
これによって,地震などによる構造物(ビル)全体の揺れを検知し,その揺れによりビルの柱,梁,壁などに亀裂が発生したり,亀裂が拡大したりする現象を検知することが可能となる。
【0021】
図1に示す例では,センサシステムが1つの制御装置1を有して,複数のGMS2のいずれか1つで検知した揺れをもとに,ビルに設定された全てのLMS3の駆動を制御する場合の構成を示している。しかし,センサシステムが,各GMS2に対応付けた複数の制御装置1を有して,各制御装置1が予め対応付けられた範囲のLMS3の駆動を制御するように構成されていてもよい。また,制御装置1は,GMS2の一部として構成されてもよい。
【0022】
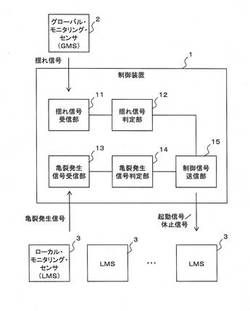
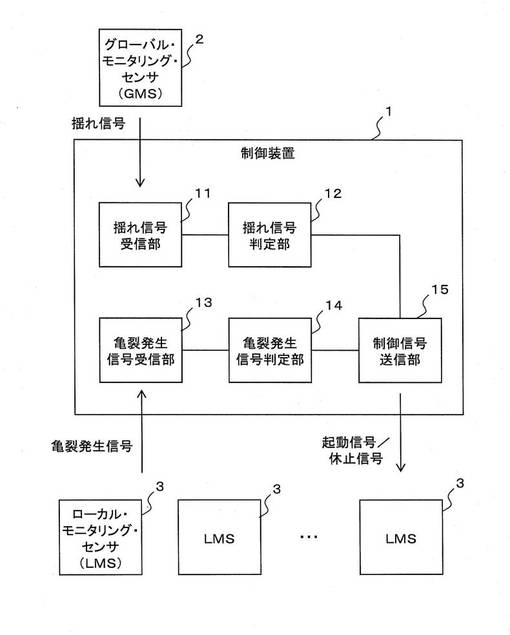
図2は,一実施例における制御装置の構成例を示す図である。
【0023】
制御装置1は,揺れ信号受信部11,揺れ信号判定部12,亀裂発生信号受信部13,亀裂発生信号判定部14,制御信号送信部15を備える。
【0024】
揺れ信号受信部11は,GMS2が検知した揺れ信号を受信する。
【0025】
揺れ信号判定部12は,受信した揺れ信号の強さまたは検知間隔を判定し,判定結果をもとに制御するLMS3を決定する。
【0026】
亀裂発生信号受信部13は,LMS3が検知した亀裂発生信号を受信する。
【0027】
亀裂発生信号判定部14は,受信した亀裂発生信号の強さまたは検知間隔を判定し,判定結果をもとに制御するLMS3を決定する。
【0028】
制御信号送信部15は,制御対象のLMS3に対し,損傷検知処理を起動する起動信号または休止する休止信号を送信する。
【0029】
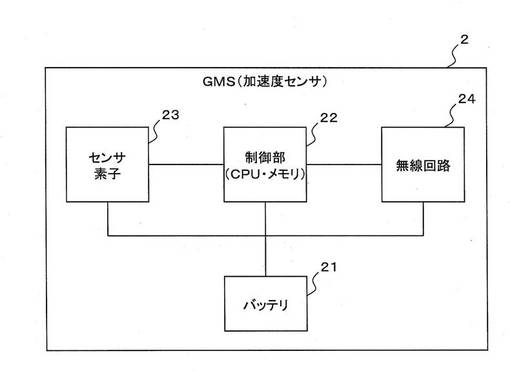
図3は,一実施例におけるGMS2の構成例を示す図である。
【0030】
GMS2は,バッテリ21,制御部22,センサ素子23,無線回路24を有して,構造物全体の揺れを検知する揺れ検知処理を行う。揺れ検知処理は,既知であるので詳細な説明を省略する。
【0031】
バッテリ21は,GMS2の駆動用バッテリである。制御部22は,バッテリ21,センサ素子23,無線回路24の各処理部の信号の処理および制御を行う。センサ素子23は,地震などの揺れによる加速度を検知する。センサ素子23は,例えば加速度センサで実施される。無線回路24は,センサ素子23の検知信号(加速度を示す揺れ信号)を発信する。
【0032】
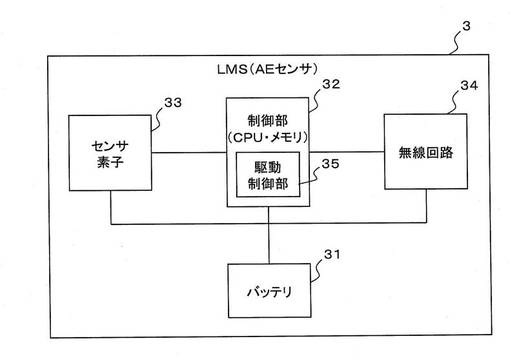
図4は,一実施例におけるGMS2の構成例を示す図である。
【0033】
LMS3は,バッテリ31,制御部32,センサ素子33,無線回路34を有して,構造物の局所的な損傷を検知し,検知した損傷の進行をモニタリングする処理(損傷検知処理)を行う。損傷検知処理は,既知であるので詳細な説明を省略する。
【0034】
バッテリ31は,LMS3の駆動用バッテリである。制御部32は,バッテリ31,センサ素子33,無線回路34の各処理部の信号の処理および制御を行う。制御部32は,内部に,駆動制御部35を有する。
【0035】
センサ素子33は,亀裂や歪みなどを検出する。センサ素子33は,例えば歪みセンサまたはAE(アコースティック・エミッション)センサで実施される。無線回路34は,センサ素子33の検知信号(AE信号),AE信号の検出を示す亀裂発生信号を発信する。
【0036】
駆動制御部35は,損傷検知処理の駆動制御を行う。駆動制御部35は,制御装置1から受信した起動信号をもとに,初期状態であったスリープ状態を解除して損傷検知処理を起動し,休止信号をもとに,損傷検知処理を休止してスリープ状態を設定する。
【0037】
スリープ状態とは,制御部32自身を省電力モードで稼働させたり,無線回路34を受信のみのモードで稼働させたり,損傷検知処理を休止してセンサ素子33の電源をオフにしたりすることによって,LMS3が必要最小限の電力のみで稼働している状態である。
【0038】
以下,LMS3の駆動制御を概説する。
【0039】
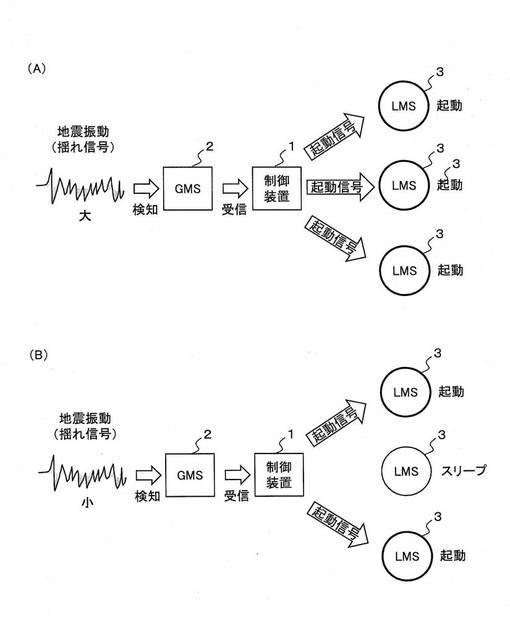
図5は,揺れ信号にもとづくLMS3の駆動制御を説明するための図である。
【0040】
センサシステムにおいて,初期状態,すなわちGMS2で揺れが検出されていない平常時の状態では,LMS3が全てスリープ状態で稼働されている。
【0041】
GMS2が地震振動による加速度を検知して揺れ信号を発信したとする。制御装置1の揺れ信号受信部11が,GMS2からの揺れ信号を受信すると,揺れ信号判定部12が,受信した揺れ信号の強さを判定する。
【0042】
揺れ信号判定部12は,揺れ信号が示す加速度が予め設定された閾値より大きい場合には,図5(A)に示すように,全てのLMS3に対して起動信号を送信する。揺れ信号判定部12は,揺れ信号が示す加速度が予め設定された閾値より小さい場合には,図5(B)に示すように,センサシステムの一部のLMS3に対して起動信号を送信する。
【0043】
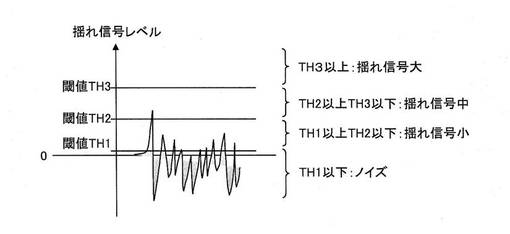
図6は,揺れ信号による判定例を示す図である。
【0044】
揺れ信号の強度レベル(例えば,揺れ幅の絶対値で示すレベル)を判定する閾値TH1〜TH3が予め設定されているとする。揺れ信号判定部12は,揺れ信号の強度レベルが閾値TH3以上であれば「揺れ信号大」と判定し,揺れ信号レベルが閾値TH2以上閾値TH3未満であれば「揺れ信号中」と判定し,揺れ信号レベルが閾値TH1以上閾値TH2未満であれば「揺れ信号小」と判定し,揺れ信号レベルが閾値TH1未満であれば「ノイズ」と判定する。なお,閾値の設定は,モニタリング対象となる構造物に応じて任意に決定される。
【0045】
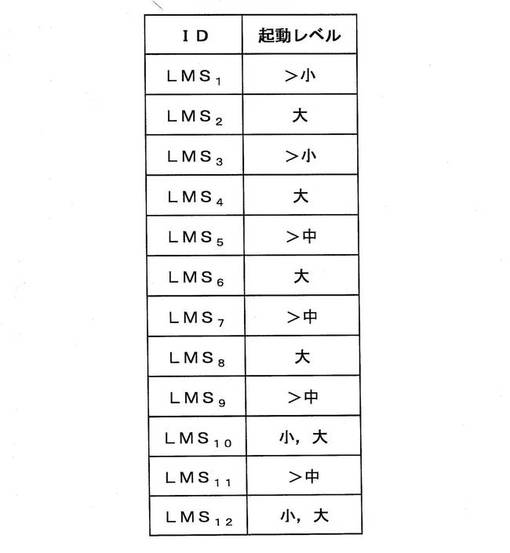
揺れ信号判定部12は,各LMS3に対応付けて起動レベルを設定したテーブルをもとに,判定結果(揺れ信号の大きさ)に応じて制御対象とするLMS3を決定する。テーブルの起動レベルは,損傷検知処理の起動信号を送信する揺れ信号の強度レベルを示す情報である。
【0046】
図7は,揺れ信号判定部12が備えるテーブル例を示す図である。
【0047】
揺れ信号判定部12が備えるテーブルは,各LMSについて,ID(識別情報),起動レベルが設定される。図7に示すテーブル例では,起動レベルの「>小」は,揺れ信号の強度レベルが小以上である場合に,「>中」は,揺れ信号の強度レベルが中以上である場合に,そのLMSを送信先とすることを表している。起動レベルの「大」は,揺れ信号の強度レベルが大である場合に,起動レベルの「小,大」は,揺れ信号の強度レベルが小または大である場合に,そのLMSを送信先とすることを表している。
【0048】
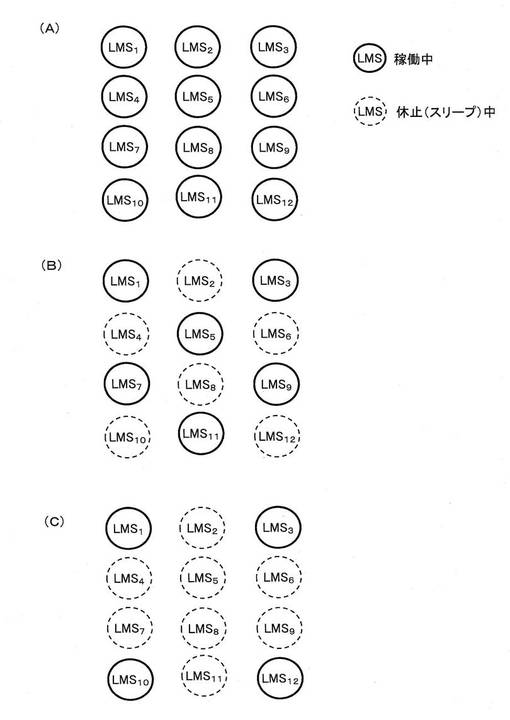
図8は,図7に示すテーブルに設定された揺れ信号の大きさと起動対象との関係を示す図である。
【0049】
図8(A)に示すように,図7のテーブルの設定例では,LMS1,LMS3は,「揺れ信号大」,「揺れ信号中」,「揺れ信号小」のいずれの場合でも起動対象となることを示している。また,図8(B)に示すように,LMS5,LMS7,LMS9,LMS11は,「揺れ信号大」,「揺れ信号中」の場合に起動対象となることを示し,図8(C)に示すように,LMS10,LMS12は,「揺れ信号大」,「揺れ信号小」の場合に起動対象となることを示している。
【0050】
制御信号送信部15は,揺れ信号判定部12が決定したLMS3に対して,スリープ状態を解除して,損傷検知処理の起動を示す起動信号を送信する。
【0051】
LMS3では,無線回路34が自装置宛の起動信号を受信すると,制御部32が,スリープ状態を解除して,損傷検知処理を起動し,センサ素子33の電源をオンにする。これにより,センサ素子33によりAE信号のセンシングが開始され,亀裂や歪みのモニタリングが可能となる。
【0052】
LMS3は,センサ素子33がセンシング開始後に亀裂や歪みによるAE信号を検知した場合に,制御部32は,亀裂発生信号を出力し,発生した亀裂などが拡大しないかどうかを検出する処理(損傷検出処理の劣化検知モードによる処理)へ移行する。
【0053】
これにより,センサシステムの制御装置1は,構造物が受けた揺れの強さに応じて損傷検出するセンサの数を制御することができる。
【0054】
次に,揺れ信号が検出されて一定時間が経過した場合のLMS3の制御を説明する。
【0055】
制御装置1は,GMS2から揺れ信号を検出して全部または一部のLMS3に対して起動信号の送信による制御を行った後,GMS2から揺れ信号を検出せずに一定時間を経過したときは,起動状態のLMS3の全部または一部に対して,損傷検知処理を休止させてスリープ状態へ戻す制御を行う。
【0056】
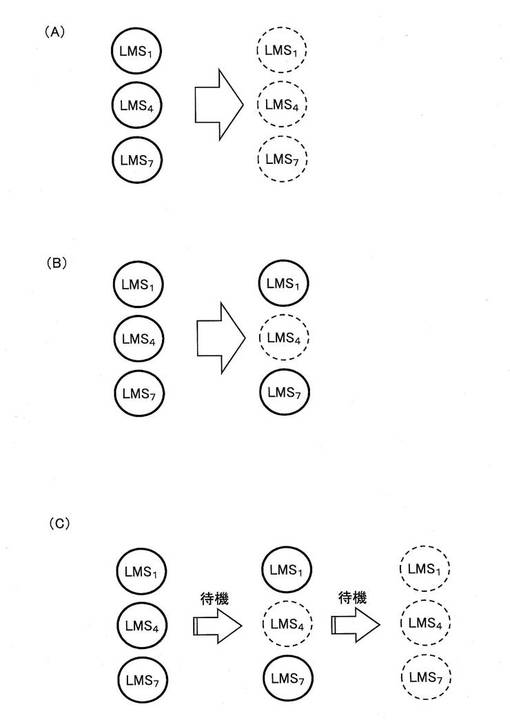
図9は,スリープ状態へ戻す制御例を示す図である。
【0057】
制御装置1の揺れ信号判定部12は,GMS2が検出した揺れ信号を最後に取得した時刻から一定時間が経過した場合に,全てのLMS3に対し,損傷検知処理の休止とスリープ状態を示す休止信号の送信先とする。その結果,図9(A)に示すように,全てのLMS3がスリープ状態となる。
【0058】
または,揺れ信号判定部12は,上記のテーブル(図7参照)を参照して,揺れ信号の強度レベルを1段階下げた場合に起動対象となるLMS3以外のLMS3に対し,休止信号を送信する。例えば,揺れ信号判定部12は,現在,全てのLMS3が起動中,すなわち「揺れ信号大」の場合の起動対象である場合に,「揺れ信号中」の場合に起動対象となるLMS3以外のLMS3を選択して休止信号の送信先とする。その結果,図9(B)に示すように,一部のLMS3がスリープ状態となる。
【0059】
また,現在のLMS3の駆動状況が「揺れ信号中」に対する起動制御の設定状態に該当すれば,「揺れ信号小」の場合に起動対象となるLMS3以外のLMS3を選択して休止信号の送信先とする。また,現在のLMS3の駆動状況が「揺れ信号小」の場合の起動制御の設定状態に該当すれば,起動状態のLMS3の全てを,休止信号の送信先とする。
【0060】
さらに,揺れ信号判定部12は,GMS2が検出した揺れ信号を最後に取得した時刻から一定時間が経過して休止信号の送信先を決定した後さらに一定時間が経過した場合に,追加的に,休止信号の送信先を決定してもよい。例えば,図9(C)に示すように,全てのLMS3が起動状態であり,一定時間の経過後にその一部のLMS3を選択して休止信号を送信し,さらに一定時間経過した場合に,起動状態のLMS3を休止信号の送信先とする。
【0061】
また,制御装置1の亀裂発生信号受信部13が,LMS3が送信した亀裂発生信号を受信すると,亀裂発生信号判定部14は,受信した亀裂発生信号の強度にもとづいて,一部のLMS3に対し損傷検知処理の起動または休止の制御を行う。
【0062】
具体的には,亀裂発生信号判定部14は,受信した亀裂発生信号の強度が,所定の閾値TH4以上であった場合には,全てのLMS3を起動信号の送信先とする。一方で,亀裂発生信号判定部14は,一定期間,強度が閾値TH4以上の亀裂発生信号を受信しなかった場合に,一部のLMS3を選択して休止信号の送信先とする。休止信号の送信先は,例えば図7に示すようなテーブルを参照して決定される。
【0063】
また,亀裂発生信号判定部14は,強度が閾値TH4以上の亀裂発生信号を送信してきたLMS3およびその近傍に設置されたLMS3について稼働状態を保持し,それ以外のLMS3を休止信号の送信先としてもよい。
【0064】
LMS3では,無線回路34が自装置宛の休止信号を受信すると,制御部32は,スリープ状態を設定する。例えば,制御部32は,自らを省電力モードによる駆動に切り換え,損傷検知処理を終了して,センサ素子33の電源をオフにし,無線回路34を受信モード(受信のみ処理する状態)にする。なお,制御部32は,休止信号を受信した場合に,センサ素子33がAE信号を検出しているかを判定して,AE信号の検出がない場合にのみスリープ状態へ移行するようにしてもよい。
【0065】
これにより,センサシステムでは,揺れ信号の強度や亀裂発生信号の強度にもとづいてどのLMS3を起動または休止させるかを決定することができるため,不要なセンシングを減らしてLMS3のバッテリ31の寿命を延ばすことが可能となる。
【0066】
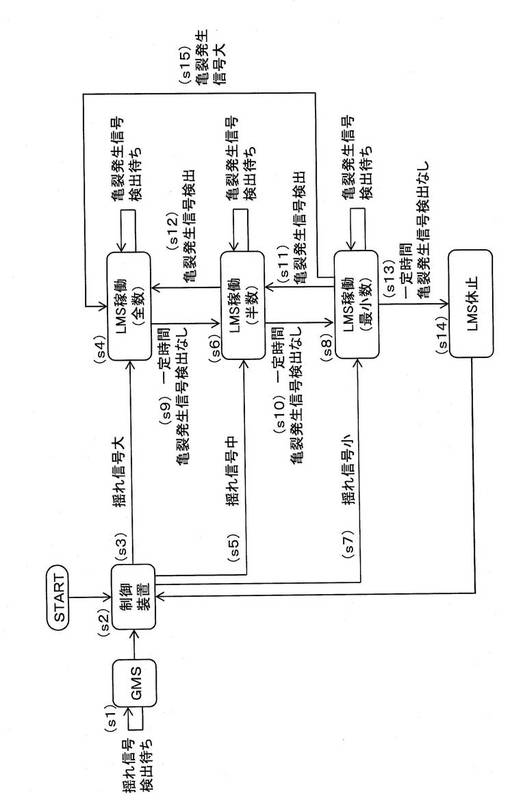
図10は,LMS稼働状態の遷移例を示す図である。
【0067】
GMS2は揺れ信号の検出を待機し(s1),GMS2が検出した揺れ信号が制御装置1で受信される(s2)。制御装置1から「揺れ信号大」が出力されると(s3),全てのLMS3へ起動信号が送信されて,センサシステムの全数のLMS3が稼働状態(LMS稼働)へ移行し,亀裂発生信号の検出を待機する(s4)。
【0068】
制御装置1によって「揺れ信号中」が出力されると(s5),半数のLMS3へ起動信号が送信されて,センサシステムの半数のLMS3が稼働状態(LMS稼働)へ移行し,亀裂発生信号の検出を待機する(s6)。制御装置1によって「揺れ信号小」が出力されると(s7),より少ない数のLMS3へ起動信号が送信されて,センサシステムの最小数のLMS3が稼働状態(LMS稼働)へ移行し,亀裂発生信号の検出を待機する(s8)。
【0069】
全数のLMS3がLMS稼働である場合に(s4),一定時間亀裂発生信号が検出されないと(s9),一部のLMS3に休止信号が送信されて,半数のLMS3による稼働状態(LMS稼働)へ移行する(s6)。半数のLMS3がLMS稼働である場合に(s6),一定時間亀裂発生信号が検出されないと(s10),一部のLMS3に休止信号が送信されて,最小数のLMS3による稼働状態(LMS稼働)へ移行する(s8)。
【0070】
最小数のLMS3がLMS稼働である場合に(s8),亀裂発生信号が検出されると(s11),一部のLMS3へ起動信号が送信され,半数のLMS3によるLMS稼働へ移行する(s6)。半数のLMS3により稼働状態の場合に(s6),亀裂発生信号が検出されると(s12),残りのLMS3へ起動信号が送信され,全数のLMS3によるLMS稼働へ移行する(s4)。
【0071】
最小数のLMS3によるLMS稼働である場合に(s8),一定時間亀裂発生信号が検出されないと(s13),全数のLMS3に対し休止信号が送信され,全てのLMS3が休止状態(LMS休止)へ移行する(s14)。
【0072】
また,最小数のLMS3により稼働状態の場合に(s8),「亀裂発生信号大」が出力されると,全てのLMS3へ起動信号が送信され,全数のLMS3によるLMS稼働へ移行する(s15)。
【0073】
図10では,LMS3の稼働が,亀裂発生信号の強度および検出タイミングで制御される場合の遷移例を示す。しかし,LMSの稼働は,亀裂発生信号の検出タイミングのみで制御されてもよく,その場合には,図10の(s15)に示す遷移が行われない。
【0074】
本実施例では,起動信号または休止信号の送信先を,制御装置1が備えるテーブル(図7参照)にもとづいて選択するが,起動信号または休止信号の送信先となるLMS3を,LMS3の設置場所にもとづいて選択するようにしてもよい。具体的には,制御装置1が各LMS3の設置場所を示す情報を有して,所定の選択処理により送信先となるLMS3を選択する。
【0075】
以上説明したように,開示するセンサシステムにおいて実施されるセンサ制御方法によれば,センサシステムの電力消費量を低減させることが可能になり,安全性を低下させることなく構造物のモニタリングを行うことが可能となる。さらには,モニタリングに必要な最小限のセンサを稼働させて,効率的なモニタリングを実現することができる。
【符号の説明】
【0076】
1 制御装置
11 揺れ信号受信部
12 揺れ信号判定部
13 亀裂発生信号受信部
14 亀裂発生信号判定部
15 制御信号送信部
2 グローバル・モニタリング・センサ(GMS)
21 バッテリ
22 制御部
23 センサ素子
24 無線回路
3 ローカル・モニタリング・センサ(LMS)
31 バッテリ
32 制御部
33 センサ素子
34 無線回路
35 駆動制御部
【技術分野】
【0001】
本発明は,構造モニタリングに用いられるセンシングデバイス(センサ)の制御技術に関する。
【背景技術】
【0002】
地震などによって大規模な構造物が受ける被害を検知するために,複数のセンサを対象となる構造物に設置して損傷や歪みなどをモニタリングするセンサシステムが知られている。
【0003】
センサシステムには,構造物全体の状態を把握するためのグローバル・モニタリング・センサ(GMS)と構造物の局所的な状態を把握するための多数のローカル・モニタリング・センサ(LMS)を構造物に設置して,構造物の健全性をモニタリングするものがある。
【0004】
このようなセンサシステムは,上記の一般的なセンサシステムと同様,各センサが各々備えるバッテリを駆動用動力源とし,電力供給を受けて駆動する。そのため,バッテリの交換等のメンテナンスが必要である。しかし,構造物に設置されるセンサ数が多くなると,バッテリ交換に要する工数や費用が膨大なものになってしまう。そのため,可能な限りバッテリの寿命を長く維持させるためにセンサの制御方法が必要となっていた。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2004−1703975号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
多数のセンサを用いるセンサシステムで,バッテリを長持ちさせるために,各センサを制御しているCPU,通信モジュールなどを一定の期間中スリープさせることによって消費電力を抑制する手法が考えられる。
【0007】
しかし,地震などの発生を予測することは困難であり,センサを常にセンシング可能な状態すなわち稼働状態にさせておく必要があった。また,地震が発生した場合にも,構造物が損傷を受けるとは限らないが,構造物が損傷を受けた部分では,その損傷が進行しているかどうか,すなわち損傷の程度が拡大しているかどうかをモニタリングし続けることが必要であった。
【0008】
したがって,センサを未センシングであるとしてスリープ状態にさせてしまうと,その間に発生・進行する損傷を検出できず,センサシステム全体のモニタリング精度が低下するおそれがあった。一方で,常に全てのセンサを稼働させていると,損傷が生じていないような箇所のセンサも稼働させることになり,電力消費に無駄が生じるという問題があった。
【0009】
本発明の目的は,かかる問題に鑑みてなされたものであり,モニタリング対象の構造物の損傷の有無やその進行をモニタリングするセンサの稼働状態を制御して,必要最小限のセンサでモニタリングする制御方法およびセンサシステムを提供することである。
【課題を解決するための手段】
【0010】
本発明において開示されるセンサ制御方法は,対象物の揺れ信号を検知するグローバル・モニタリング・センサと,該対象物の局所で生じる損傷を示す損傷信号を検知する複数のローカル・モニタリング・センサと,制御部とを備えるセンサシステムが実行するセンサ制御方法であって,1)グローバル・モニタリング・センサが検出した揺れ信号を制御部へ送信し,2)前記制御部が前記揺れ信号を受信し,各ローカル・モニタリング・センサへ起動信号を送信し,3)前記ローカル・モニタリング・センサ各々が,前記起動信号を受信して損傷検知処理を起動するものである。
【発明の効果】
【0011】
上記したセンサ制御方法によれば,センサシステムの各センサの稼働時間を効果的に制御するため,モニタリング精度を低下させることなくセンサシステムの電力消費量を低減させることができる。
【図面の簡単な説明】
【0012】
【図1】一実施例におけるセンサシステムの各センサの配置例を示す図である。
【図2】一実施例における制御装置の構成例を示す図である。
【図3】一実施例におけるGMS2の構成例を示す図である。
【図4】一実施例におけるGMS2の構成例を示す図である。
【図5】揺れ信号にもとづくLMS3の駆動制御を説明するための図である。
【図6】揺れ信号による判定例を示す図である。
【図7】揺れ信号判定部12が備えるテーブル例を示す図である。
【図8】図7に示すテーブルに設定された揺れ信号の大きさと起動対象との関係を示す図である。
【図9】スリープ状態へ戻す制御例を示す図である。
【図10】LMS稼働状態の遷移例を示す図である。
【発明を実施するための形態】
【0013】
以下,本発明の一態様として開示するセンサ制御方法および制御装置を実施するセンサシステムを説明する。
【0014】
センサシステムは,構造物の健全性をモニタリングするシステムであって,制御装置1,グローバル・モニタリング・センサ(GMS)2,およびローカル・モニタリング・センサ(LMS)3を備える。
【0015】
センサシステムの制御装置1は,GMS2が検知した揺れにもとづいてLMS3の駆動を制御する装置である。制御装置1は,CPU,主記憶部および補助記憶部を備えるコンピュータ,または,専用ハードウェアによって実施される。また,制御装置1は,コンピュータで実施される場合に,ハードウェアと予め格納されたプログラムとによって上記の各処理部を実施する。なお,プログラムは,コンピュータで読み取り可能な記録媒体に記録しておくことができる。
【0016】
GMS2は,モニタリング対象の構造物全体の状態を把握するためのセンサである。GMS2は,地震などによる構造物全体の揺れを検知するものであり,たとえば加速度センサで実施される。
【0017】
LMS3は,構造物の局所的な状態を把握するためのセンサである。LMS3は,局所的な範囲を監視して,亀裂,歪みなどの発生や,それら亀裂,歪みの拡大などをモニタリングするものであり,たとえば歪みセンサやAE(アコースティック・エミッション)センサなどで実施される。
【0018】
図1は,一実施例におけるセンサシステムの各センサの配置例を示す図である。
【0019】
本実施例のセンサシステムは,役割が異なるセンサを設置する。図1では,モニタリング対象が構造物(例えばビル)などである場合に,センサシステムの各センサの設置例を簡略的に図示している。ビル全体の動きを検知するため,GMS2は,ビルに対して広い範囲,たとえばビルの四隅に設置される。LMS3は,局所的な部分,たとえばビルの柱や梁,壁面などの損傷を検知するため,狭い領域に多数のセンサが設置される。図1に示すように,ビルの柱の一定の領域に,多数のLMS3が配置される。
【0020】
これによって,地震などによる構造物(ビル)全体の揺れを検知し,その揺れによりビルの柱,梁,壁などに亀裂が発生したり,亀裂が拡大したりする現象を検知することが可能となる。
【0021】
図1に示す例では,センサシステムが1つの制御装置1を有して,複数のGMS2のいずれか1つで検知した揺れをもとに,ビルに設定された全てのLMS3の駆動を制御する場合の構成を示している。しかし,センサシステムが,各GMS2に対応付けた複数の制御装置1を有して,各制御装置1が予め対応付けられた範囲のLMS3の駆動を制御するように構成されていてもよい。また,制御装置1は,GMS2の一部として構成されてもよい。
【0022】
図2は,一実施例における制御装置の構成例を示す図である。
【0023】
制御装置1は,揺れ信号受信部11,揺れ信号判定部12,亀裂発生信号受信部13,亀裂発生信号判定部14,制御信号送信部15を備える。
【0024】
揺れ信号受信部11は,GMS2が検知した揺れ信号を受信する。
【0025】
揺れ信号判定部12は,受信した揺れ信号の強さまたは検知間隔を判定し,判定結果をもとに制御するLMS3を決定する。
【0026】
亀裂発生信号受信部13は,LMS3が検知した亀裂発生信号を受信する。
【0027】
亀裂発生信号判定部14は,受信した亀裂発生信号の強さまたは検知間隔を判定し,判定結果をもとに制御するLMS3を決定する。
【0028】
制御信号送信部15は,制御対象のLMS3に対し,損傷検知処理を起動する起動信号または休止する休止信号を送信する。
【0029】
図3は,一実施例におけるGMS2の構成例を示す図である。
【0030】
GMS2は,バッテリ21,制御部22,センサ素子23,無線回路24を有して,構造物全体の揺れを検知する揺れ検知処理を行う。揺れ検知処理は,既知であるので詳細な説明を省略する。
【0031】
バッテリ21は,GMS2の駆動用バッテリである。制御部22は,バッテリ21,センサ素子23,無線回路24の各処理部の信号の処理および制御を行う。センサ素子23は,地震などの揺れによる加速度を検知する。センサ素子23は,例えば加速度センサで実施される。無線回路24は,センサ素子23の検知信号(加速度を示す揺れ信号)を発信する。
【0032】
図4は,一実施例におけるGMS2の構成例を示す図である。
【0033】
LMS3は,バッテリ31,制御部32,センサ素子33,無線回路34を有して,構造物の局所的な損傷を検知し,検知した損傷の進行をモニタリングする処理(損傷検知処理)を行う。損傷検知処理は,既知であるので詳細な説明を省略する。
【0034】
バッテリ31は,LMS3の駆動用バッテリである。制御部32は,バッテリ31,センサ素子33,無線回路34の各処理部の信号の処理および制御を行う。制御部32は,内部に,駆動制御部35を有する。
【0035】
センサ素子33は,亀裂や歪みなどを検出する。センサ素子33は,例えば歪みセンサまたはAE(アコースティック・エミッション)センサで実施される。無線回路34は,センサ素子33の検知信号(AE信号),AE信号の検出を示す亀裂発生信号を発信する。
【0036】
駆動制御部35は,損傷検知処理の駆動制御を行う。駆動制御部35は,制御装置1から受信した起動信号をもとに,初期状態であったスリープ状態を解除して損傷検知処理を起動し,休止信号をもとに,損傷検知処理を休止してスリープ状態を設定する。
【0037】
スリープ状態とは,制御部32自身を省電力モードで稼働させたり,無線回路34を受信のみのモードで稼働させたり,損傷検知処理を休止してセンサ素子33の電源をオフにしたりすることによって,LMS3が必要最小限の電力のみで稼働している状態である。
【0038】
以下,LMS3の駆動制御を概説する。
【0039】
図5は,揺れ信号にもとづくLMS3の駆動制御を説明するための図である。
【0040】
センサシステムにおいて,初期状態,すなわちGMS2で揺れが検出されていない平常時の状態では,LMS3が全てスリープ状態で稼働されている。
【0041】
GMS2が地震振動による加速度を検知して揺れ信号を発信したとする。制御装置1の揺れ信号受信部11が,GMS2からの揺れ信号を受信すると,揺れ信号判定部12が,受信した揺れ信号の強さを判定する。
【0042】
揺れ信号判定部12は,揺れ信号が示す加速度が予め設定された閾値より大きい場合には,図5(A)に示すように,全てのLMS3に対して起動信号を送信する。揺れ信号判定部12は,揺れ信号が示す加速度が予め設定された閾値より小さい場合には,図5(B)に示すように,センサシステムの一部のLMS3に対して起動信号を送信する。
【0043】
図6は,揺れ信号による判定例を示す図である。
【0044】
揺れ信号の強度レベル(例えば,揺れ幅の絶対値で示すレベル)を判定する閾値TH1〜TH3が予め設定されているとする。揺れ信号判定部12は,揺れ信号の強度レベルが閾値TH3以上であれば「揺れ信号大」と判定し,揺れ信号レベルが閾値TH2以上閾値TH3未満であれば「揺れ信号中」と判定し,揺れ信号レベルが閾値TH1以上閾値TH2未満であれば「揺れ信号小」と判定し,揺れ信号レベルが閾値TH1未満であれば「ノイズ」と判定する。なお,閾値の設定は,モニタリング対象となる構造物に応じて任意に決定される。
【0045】
揺れ信号判定部12は,各LMS3に対応付けて起動レベルを設定したテーブルをもとに,判定結果(揺れ信号の大きさ)に応じて制御対象とするLMS3を決定する。テーブルの起動レベルは,損傷検知処理の起動信号を送信する揺れ信号の強度レベルを示す情報である。
【0046】
図7は,揺れ信号判定部12が備えるテーブル例を示す図である。
【0047】
揺れ信号判定部12が備えるテーブルは,各LMSについて,ID(識別情報),起動レベルが設定される。図7に示すテーブル例では,起動レベルの「>小」は,揺れ信号の強度レベルが小以上である場合に,「>中」は,揺れ信号の強度レベルが中以上である場合に,そのLMSを送信先とすることを表している。起動レベルの「大」は,揺れ信号の強度レベルが大である場合に,起動レベルの「小,大」は,揺れ信号の強度レベルが小または大である場合に,そのLMSを送信先とすることを表している。
【0048】
図8は,図7に示すテーブルに設定された揺れ信号の大きさと起動対象との関係を示す図である。
【0049】
図8(A)に示すように,図7のテーブルの設定例では,LMS1,LMS3は,「揺れ信号大」,「揺れ信号中」,「揺れ信号小」のいずれの場合でも起動対象となることを示している。また,図8(B)に示すように,LMS5,LMS7,LMS9,LMS11は,「揺れ信号大」,「揺れ信号中」の場合に起動対象となることを示し,図8(C)に示すように,LMS10,LMS12は,「揺れ信号大」,「揺れ信号小」の場合に起動対象となることを示している。
【0050】
制御信号送信部15は,揺れ信号判定部12が決定したLMS3に対して,スリープ状態を解除して,損傷検知処理の起動を示す起動信号を送信する。
【0051】
LMS3では,無線回路34が自装置宛の起動信号を受信すると,制御部32が,スリープ状態を解除して,損傷検知処理を起動し,センサ素子33の電源をオンにする。これにより,センサ素子33によりAE信号のセンシングが開始され,亀裂や歪みのモニタリングが可能となる。
【0052】
LMS3は,センサ素子33がセンシング開始後に亀裂や歪みによるAE信号を検知した場合に,制御部32は,亀裂発生信号を出力し,発生した亀裂などが拡大しないかどうかを検出する処理(損傷検出処理の劣化検知モードによる処理)へ移行する。
【0053】
これにより,センサシステムの制御装置1は,構造物が受けた揺れの強さに応じて損傷検出するセンサの数を制御することができる。
【0054】
次に,揺れ信号が検出されて一定時間が経過した場合のLMS3の制御を説明する。
【0055】
制御装置1は,GMS2から揺れ信号を検出して全部または一部のLMS3に対して起動信号の送信による制御を行った後,GMS2から揺れ信号を検出せずに一定時間を経過したときは,起動状態のLMS3の全部または一部に対して,損傷検知処理を休止させてスリープ状態へ戻す制御を行う。
【0056】
図9は,スリープ状態へ戻す制御例を示す図である。
【0057】
制御装置1の揺れ信号判定部12は,GMS2が検出した揺れ信号を最後に取得した時刻から一定時間が経過した場合に,全てのLMS3に対し,損傷検知処理の休止とスリープ状態を示す休止信号の送信先とする。その結果,図9(A)に示すように,全てのLMS3がスリープ状態となる。
【0058】
または,揺れ信号判定部12は,上記のテーブル(図7参照)を参照して,揺れ信号の強度レベルを1段階下げた場合に起動対象となるLMS3以外のLMS3に対し,休止信号を送信する。例えば,揺れ信号判定部12は,現在,全てのLMS3が起動中,すなわち「揺れ信号大」の場合の起動対象である場合に,「揺れ信号中」の場合に起動対象となるLMS3以外のLMS3を選択して休止信号の送信先とする。その結果,図9(B)に示すように,一部のLMS3がスリープ状態となる。
【0059】
また,現在のLMS3の駆動状況が「揺れ信号中」に対する起動制御の設定状態に該当すれば,「揺れ信号小」の場合に起動対象となるLMS3以外のLMS3を選択して休止信号の送信先とする。また,現在のLMS3の駆動状況が「揺れ信号小」の場合の起動制御の設定状態に該当すれば,起動状態のLMS3の全てを,休止信号の送信先とする。
【0060】
さらに,揺れ信号判定部12は,GMS2が検出した揺れ信号を最後に取得した時刻から一定時間が経過して休止信号の送信先を決定した後さらに一定時間が経過した場合に,追加的に,休止信号の送信先を決定してもよい。例えば,図9(C)に示すように,全てのLMS3が起動状態であり,一定時間の経過後にその一部のLMS3を選択して休止信号を送信し,さらに一定時間経過した場合に,起動状態のLMS3を休止信号の送信先とする。
【0061】
また,制御装置1の亀裂発生信号受信部13が,LMS3が送信した亀裂発生信号を受信すると,亀裂発生信号判定部14は,受信した亀裂発生信号の強度にもとづいて,一部のLMS3に対し損傷検知処理の起動または休止の制御を行う。
【0062】
具体的には,亀裂発生信号判定部14は,受信した亀裂発生信号の強度が,所定の閾値TH4以上であった場合には,全てのLMS3を起動信号の送信先とする。一方で,亀裂発生信号判定部14は,一定期間,強度が閾値TH4以上の亀裂発生信号を受信しなかった場合に,一部のLMS3を選択して休止信号の送信先とする。休止信号の送信先は,例えば図7に示すようなテーブルを参照して決定される。
【0063】
また,亀裂発生信号判定部14は,強度が閾値TH4以上の亀裂発生信号を送信してきたLMS3およびその近傍に設置されたLMS3について稼働状態を保持し,それ以外のLMS3を休止信号の送信先としてもよい。
【0064】
LMS3では,無線回路34が自装置宛の休止信号を受信すると,制御部32は,スリープ状態を設定する。例えば,制御部32は,自らを省電力モードによる駆動に切り換え,損傷検知処理を終了して,センサ素子33の電源をオフにし,無線回路34を受信モード(受信のみ処理する状態)にする。なお,制御部32は,休止信号を受信した場合に,センサ素子33がAE信号を検出しているかを判定して,AE信号の検出がない場合にのみスリープ状態へ移行するようにしてもよい。
【0065】
これにより,センサシステムでは,揺れ信号の強度や亀裂発生信号の強度にもとづいてどのLMS3を起動または休止させるかを決定することができるため,不要なセンシングを減らしてLMS3のバッテリ31の寿命を延ばすことが可能となる。
【0066】
図10は,LMS稼働状態の遷移例を示す図である。
【0067】
GMS2は揺れ信号の検出を待機し(s1),GMS2が検出した揺れ信号が制御装置1で受信される(s2)。制御装置1から「揺れ信号大」が出力されると(s3),全てのLMS3へ起動信号が送信されて,センサシステムの全数のLMS3が稼働状態(LMS稼働)へ移行し,亀裂発生信号の検出を待機する(s4)。
【0068】
制御装置1によって「揺れ信号中」が出力されると(s5),半数のLMS3へ起動信号が送信されて,センサシステムの半数のLMS3が稼働状態(LMS稼働)へ移行し,亀裂発生信号の検出を待機する(s6)。制御装置1によって「揺れ信号小」が出力されると(s7),より少ない数のLMS3へ起動信号が送信されて,センサシステムの最小数のLMS3が稼働状態(LMS稼働)へ移行し,亀裂発生信号の検出を待機する(s8)。
【0069】
全数のLMS3がLMS稼働である場合に(s4),一定時間亀裂発生信号が検出されないと(s9),一部のLMS3に休止信号が送信されて,半数のLMS3による稼働状態(LMS稼働)へ移行する(s6)。半数のLMS3がLMS稼働である場合に(s6),一定時間亀裂発生信号が検出されないと(s10),一部のLMS3に休止信号が送信されて,最小数のLMS3による稼働状態(LMS稼働)へ移行する(s8)。
【0070】
最小数のLMS3がLMS稼働である場合に(s8),亀裂発生信号が検出されると(s11),一部のLMS3へ起動信号が送信され,半数のLMS3によるLMS稼働へ移行する(s6)。半数のLMS3により稼働状態の場合に(s6),亀裂発生信号が検出されると(s12),残りのLMS3へ起動信号が送信され,全数のLMS3によるLMS稼働へ移行する(s4)。
【0071】
最小数のLMS3によるLMS稼働である場合に(s8),一定時間亀裂発生信号が検出されないと(s13),全数のLMS3に対し休止信号が送信され,全てのLMS3が休止状態(LMS休止)へ移行する(s14)。
【0072】
また,最小数のLMS3により稼働状態の場合に(s8),「亀裂発生信号大」が出力されると,全てのLMS3へ起動信号が送信され,全数のLMS3によるLMS稼働へ移行する(s15)。
【0073】
図10では,LMS3の稼働が,亀裂発生信号の強度および検出タイミングで制御される場合の遷移例を示す。しかし,LMSの稼働は,亀裂発生信号の検出タイミングのみで制御されてもよく,その場合には,図10の(s15)に示す遷移が行われない。
【0074】
本実施例では,起動信号または休止信号の送信先を,制御装置1が備えるテーブル(図7参照)にもとづいて選択するが,起動信号または休止信号の送信先となるLMS3を,LMS3の設置場所にもとづいて選択するようにしてもよい。具体的には,制御装置1が各LMS3の設置場所を示す情報を有して,所定の選択処理により送信先となるLMS3を選択する。
【0075】
以上説明したように,開示するセンサシステムにおいて実施されるセンサ制御方法によれば,センサシステムの電力消費量を低減させることが可能になり,安全性を低下させることなく構造物のモニタリングを行うことが可能となる。さらには,モニタリングに必要な最小限のセンサを稼働させて,効率的なモニタリングを実現することができる。
【符号の説明】
【0076】
1 制御装置
11 揺れ信号受信部
12 揺れ信号判定部
13 亀裂発生信号受信部
14 亀裂発生信号判定部
15 制御信号送信部
2 グローバル・モニタリング・センサ(GMS)
21 バッテリ
22 制御部
23 センサ素子
24 無線回路
3 ローカル・モニタリング・センサ(LMS)
31 バッテリ
32 制御部
33 センサ素子
34 無線回路
35 駆動制御部
【特許請求の範囲】
【請求項1】
対象物の揺れ信号を検知するグローバル・モニタリング・センサと,該対象物の局所で生じる損傷を示す損傷信号を検知する複数のローカル・モニタリング・センサと,制御部とを備えるセンサシステムが実行するセンサ制御方法であって,
グローバル・モニタリング・センサが検出した揺れ信号を制御部へ送信し,
前記制御部が前記揺れ信号を受信し,各ローカル・モニタリング・センサへ起動信号を送信し,
前記ローカル・モニタリング・センサ各々が,前記起動信号を受信して損傷検知処理を起動する
ことを特徴とするセンサ制御方法。
【請求項2】
前記制御部が起動信号を送信する際,前記制御部が,前記受信した揺れ信号の強度を判定し,前記揺れ信号の強度が閾値以上である場合に全てのローカル・モニタリング・センサに対して起動信号を送信し,前記揺れ信号の強度が閾値未満である場合に,一部のローカル・モニタリング・センサを選択して前記起動信号を送信する
ことを特徴とする請求項1に記載のセンサ制御方法。
【請求項3】
前記制御部が起動信号を送信する際,前記制御部が,損傷検知処理を実行する揺れ信号の強度を示すテーブルを備えて,前記受信した揺れ信号の強度を判定し,前記テーブルをもとに前記判定した揺れ信号の強度に対応する強度が設定されているローカル・モニタリング・センサを選択して前記起動信号を送信する
ことを特徴とする請求項1に記載のセンサ制御方法。
【請求項4】
さらに,前記損傷検知処理を起動したローカル・モニタリング・センサ各々が,前記起動信号の受信から一定の時間に損傷信号を検出しなかった場合に自センサの損傷検知処理を休止する
ことを特徴とする請求項1ないし請求項3のいずれか一項に記載のセンサ制御方法。
【請求項5】
さらに,前記制御部が,前記ローカル・モニタリング・センサから一定の時間に損傷信号を検出しなかった場合に,前記損傷検知処理を起動したローカル・モニタリング・センサの全部または一部に対し,前記損傷検知処理を休止する休止信号を送信し,
前記損傷検知処理を起動したローカル・モニタリング・センサ各々が,前記休止信号を受信して自センサの損傷検知処理を休止する
ことを特徴とする請求項1ないし請求項3のいずれか一項に記載のセンサ制御方法。
【請求項6】
前記制御部が前記休止信号を送信する際,前記制御部は,前記休止信号の送信後から一定の時間に損傷信号を検出しなかった場合に,前記休止信号を送信していないローカル・モニタリング・センサの全部または一部に対して前記休止信号を送信する
ことを特徴とする請求項5に記載のセンサ制御方法。
【請求項7】
前記制御部が前記休止信号を送信する際,前記制御部が,前記ローカル・モニタリング・センサが検出した損傷信号の強度を判定し,前記損傷信号の強度が所定の閾値以上である場合に前記休止信号の送信を抑止し,前記損傷信号の強度が所定の閾値以下である場合に前記損傷検知処理を起動したローカル・モニタリング・センサの一部に対し前記休止信号を送信する
ことを特徴とする請求項5に記載のセンサ制御方法。
【請求項8】
対象物の揺れ信号を検出するグローバル・モニタリング・センサと,該対象物の局所で生じる損傷を示す損傷信号を検出する複数のローカル・モニタリング・センサと,制御装置とを備えるセンサシステムであって,
前記制御装置は,
グローバル・モニタリング・センサが検出した揺れ信号を受信する揺れ信号受信部と,
前記受信した揺れ信号をもとに,各ローカル・モニタリング・センサへ損傷検知処理の起動信号を送信する制御信号送信部とを備えて,
前記ローカル・モニタリング・センサ各々が,
前記起動信号を受信して損傷検知処理を起動する駆動制御部を備える
ことを特徴とするセンサシステム。
【請求項1】
対象物の揺れ信号を検知するグローバル・モニタリング・センサと,該対象物の局所で生じる損傷を示す損傷信号を検知する複数のローカル・モニタリング・センサと,制御部とを備えるセンサシステムが実行するセンサ制御方法であって,
グローバル・モニタリング・センサが検出した揺れ信号を制御部へ送信し,
前記制御部が前記揺れ信号を受信し,各ローカル・モニタリング・センサへ起動信号を送信し,
前記ローカル・モニタリング・センサ各々が,前記起動信号を受信して損傷検知処理を起動する
ことを特徴とするセンサ制御方法。
【請求項2】
前記制御部が起動信号を送信する際,前記制御部が,前記受信した揺れ信号の強度を判定し,前記揺れ信号の強度が閾値以上である場合に全てのローカル・モニタリング・センサに対して起動信号を送信し,前記揺れ信号の強度が閾値未満である場合に,一部のローカル・モニタリング・センサを選択して前記起動信号を送信する
ことを特徴とする請求項1に記載のセンサ制御方法。
【請求項3】
前記制御部が起動信号を送信する際,前記制御部が,損傷検知処理を実行する揺れ信号の強度を示すテーブルを備えて,前記受信した揺れ信号の強度を判定し,前記テーブルをもとに前記判定した揺れ信号の強度に対応する強度が設定されているローカル・モニタリング・センサを選択して前記起動信号を送信する
ことを特徴とする請求項1に記載のセンサ制御方法。
【請求項4】
さらに,前記損傷検知処理を起動したローカル・モニタリング・センサ各々が,前記起動信号の受信から一定の時間に損傷信号を検出しなかった場合に自センサの損傷検知処理を休止する
ことを特徴とする請求項1ないし請求項3のいずれか一項に記載のセンサ制御方法。
【請求項5】
さらに,前記制御部が,前記ローカル・モニタリング・センサから一定の時間に損傷信号を検出しなかった場合に,前記損傷検知処理を起動したローカル・モニタリング・センサの全部または一部に対し,前記損傷検知処理を休止する休止信号を送信し,
前記損傷検知処理を起動したローカル・モニタリング・センサ各々が,前記休止信号を受信して自センサの損傷検知処理を休止する
ことを特徴とする請求項1ないし請求項3のいずれか一項に記載のセンサ制御方法。
【請求項6】
前記制御部が前記休止信号を送信する際,前記制御部は,前記休止信号の送信後から一定の時間に損傷信号を検出しなかった場合に,前記休止信号を送信していないローカル・モニタリング・センサの全部または一部に対して前記休止信号を送信する
ことを特徴とする請求項5に記載のセンサ制御方法。
【請求項7】
前記制御部が前記休止信号を送信する際,前記制御部が,前記ローカル・モニタリング・センサが検出した損傷信号の強度を判定し,前記損傷信号の強度が所定の閾値以上である場合に前記休止信号の送信を抑止し,前記損傷信号の強度が所定の閾値以下である場合に前記損傷検知処理を起動したローカル・モニタリング・センサの一部に対し前記休止信号を送信する
ことを特徴とする請求項5に記載のセンサ制御方法。
【請求項8】
対象物の揺れ信号を検出するグローバル・モニタリング・センサと,該対象物の局所で生じる損傷を示す損傷信号を検出する複数のローカル・モニタリング・センサと,制御装置とを備えるセンサシステムであって,
前記制御装置は,
グローバル・モニタリング・センサが検出した揺れ信号を受信する揺れ信号受信部と,
前記受信した揺れ信号をもとに,各ローカル・モニタリング・センサへ損傷検知処理の起動信号を送信する制御信号送信部とを備えて,
前記ローカル・モニタリング・センサ各々が,
前記起動信号を受信して損傷検知処理を起動する駆動制御部を備える
ことを特徴とするセンサシステム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−233795(P2012−233795A)
【公開日】平成24年11月29日(2012.11.29)
【国際特許分類】
【出願番号】特願2011−102766(P2011−102766)
【出願日】平成23年5月2日(2011.5.2)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
【公開日】平成24年11月29日(2012.11.29)
【国際特許分類】
【出願日】平成23年5月2日(2011.5.2)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
[ Back to top ]