
センサ制御装置
【課題】3次元センサのビーム指向方向やビーム指向範囲を適正に制御して、3次元センサの3次元角度の測位精度を高めることができるセンサ制御装置を得ることを目的とする。
【解決手段】軌道テンプレートと目標の発射諸元パラメータを用いて目標の2次元角度を予測し、その2次元角度の予測値と2次元センサ1により測位された2次元角度の観測値との差異が許容範囲内にあるか否かを判定し、その判定結果が許容範囲内である旨を示す場合、その発射諸元パラメータを用いて目標の3次元位置を予測するようにしたものである。
【解決手段】軌道テンプレートと目標の発射諸元パラメータを用いて目標の2次元角度を予測し、その2次元角度の予測値と2次元センサ1により測位された2次元角度の観測値との差異が許容範囲内にあるか否かを判定し、その判定結果が許容範囲内である旨を示す場合、その発射諸元パラメータを用いて目標の3次元位置を予測するようにしたものである。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、目標の3次元角度を測位する3次元センサを制御するセンサ制御装置に関するものである。
【背景技術】
【0002】
従来のセンサ制御装置は、2次元センサのビーム指向方向やビーム指向範囲を制御するものであり、3次元センサのビーム指向方向やビーム指向範囲を制御するセンサ制御装置は開発されていない(例えば、特許文献1を参照)。
因みに、2次元センサにより測位された目標の仰角と方位角の観測値を、距離、仰角及び方位角を測位する3次元センサの観測値に変換するには、2次元センサと目標間の距離情報が必要であるが、2次元センサは、距離が可観測でなく、仰角と方位角のみを測位するものであるため、従来のセンサ制御装置では、3次元センサのビーム指向方向やビーム指向範囲を制御することができない。
【0003】
【特許文献1】特開平10−160832号公報(段落番号[0018]から[0019]、図1)
【発明の開示】
【発明が解決しようとする課題】
【0004】
従来のセンサ制御装置は以上のように構成されているので、2次元センサのビーム指向方向やビーム指向範囲を制御することができても、3次元センサのビーム指向方向やビーム指向範囲を制御することができない。このため、レーダ装置が3次元センサを搭載していても、3次元センサのビーム指向方向やビーム指向範囲を適正に制御することができず、目標の3次元角度の測位精度が劣化することがあるなどの課題があった。
【0005】
この発明は上記のような課題を解決するためになされたもので、3次元センサのビーム指向方向やビーム指向範囲を適正に制御して、3次元センサの3次元角度の測位精度を高めることができるセンサ制御装置を得ることを目的とする。
【課題を解決するための手段】
【0006】
この発明に係るセンサ制御装置は、記憶手段に記憶されている軌道テンプレートと目標の発射諸元情報を用いて目標の2次元角度を予測し、その2次元角度の予測値と2次元センサにより測位された2次元角度の観測値との差異が許容範囲内にあるか否かを判定する予測判定処理を実施する判定手段と、その判定手段の判定結果が許容範囲外である旨を示す場合、その発射諸元情報を更新し、更新後の発射諸元情報を判定手段に出力して、再度の予測判定処理を実施させる一方、判定手段の判定結果が許容範囲内である旨を示す場合、その発射諸元情報を用いて目標の3次元位置を予測する予測手段とを設け、センサ制御手段が3次元センサのビーム指向方向を予測手段により予測された3次元位置に合わせるようにしたものである。
【発明の効果】
【0007】
この発明によれば、記憶手段に記憶されている軌道テンプレートと目標の発射諸元情報を用いて目標の2次元角度を予測し、その2次元角度の予測値と2次元センサにより測位された2次元角度の観測値との差異が許容範囲内にあるか否かを判定する予測判定処理を実施する判定手段と、その判定手段の判定結果が許容範囲外である旨を示す場合、その発射諸元情報を更新し、更新後の発射諸元情報を判定手段に出力して、再度の予測判定処理を実施させる一方、判定手段の判定結果が許容範囲内である旨を示す場合、その発射諸元情報を用いて目標の3次元位置を予測する予測手段とを設け、センサ制御手段が3次元センサのビーム指向方向を予測手段により予測された3次元位置に合わせるように構成したので、3次元センサのビーム指向方向を適正に制御して、3次元センサの3次元角度の測位精度を高めることができる効果がある。
【発明を実施するための最良の形態】
【0008】
実施の形態1.
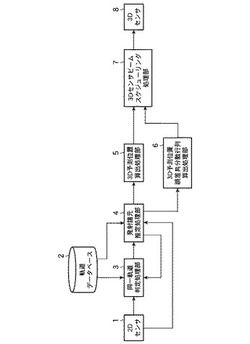
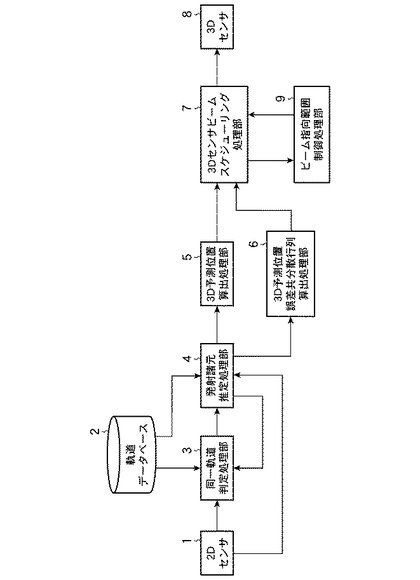
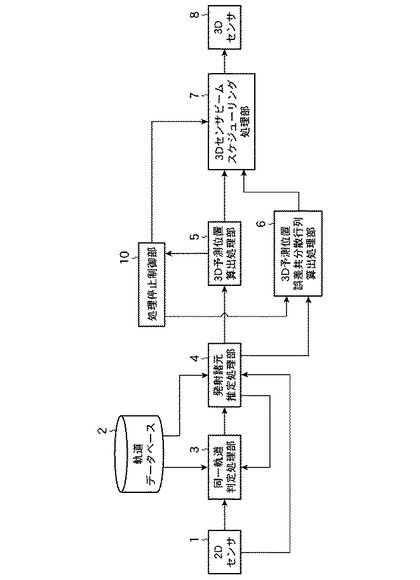
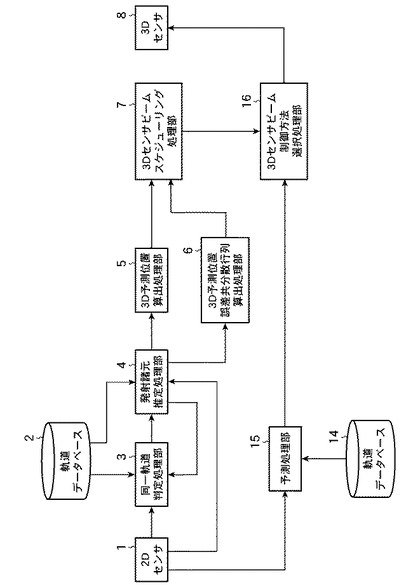
図1はこの発明の実施の形態1によるセンサ制御装置を示す構成図であり、図において、2Dセンサ1はビームを目標に照射して、その目標の2次元角度(仰角、方位角)を測位する2次元センサであり、例えば、IRセンサやパッシブレーダなどが該当する。
軌道データベース2は目標の軌道(例えば、目標の発射時刻、高度、ダウンレンジなど)を示す軌道テンプレートを記憶しているメモリである。なお、軌道データベース2は記憶手段を構成している。
【0009】
同一軌道判定処理部3は軌道データベース2に記憶されている軌道テンプレートと、発射諸元推定処理部4から出力された目標の発射諸元情報である発射諸元パラメータ(例えば、目標の発射点の緯度、経度、高度、右昇天角、赤緯、目標の速度ベクトルのヘディングなど)とを用いて、目標の2次元角度を予測し、その2次元角度の予測値と2Dセンサ1により測位された2次元角度の観測値との差異が許容範囲内にあるか否かを判定する予測判定処理を実施する。なお、同一軌道判定処理部3は判定手段を構成している。
【0010】
発射諸元推定処理部4は同一軌道判定処理部3の判定結果が許容範囲外である旨を示す場合、目標の発射諸元パラメータを更新し、更新後の発射諸元パラメータを同一軌道判定処理部3に出力して、再度の予測判定処理を実施させる一方、同一軌道判定処理部3の判定結果が許容範囲内である旨を示す場合、目標の発射諸元パラメータ(更新されている場合には、更新後の発射諸元パラメータ)を3D予測位置算出処理部5及び3D予測位置誤差共分散行列算出処理部6に出力する処理を実施する。
3D予測位置算出処理部5は発射諸元推定処理部4から出力された目標の発射諸元パラメータを用いて、目標の3次元位置を予測する処理を実施する。
3D予測位置誤差共分散行列算出処理部6は発射諸元推定処理部4から出力された目標の発射諸元パラメータを用いて、3Dセンサ8のビーム指向範囲に相当する目標の3次元位置の誤差共分散行列を演算する処理を実施する。
なお、発射諸元推定処理部4、3D予測位置算出処理部5及び3D予測位置誤差共分散行列算出処理部6から予測手段が構成されている。
【0011】
3Dセンサビームスケジューリング処理部7は3Dセンサ8のビーム指向方向を3D予測位置算出処理部5により予測された3次元位置に合わせるとともに、3Dセンサ8のビーム指向範囲を3D予測位置誤差共分散行列算出処理部6により演算された3次元位置の誤差共分散行列(ビーム指向範囲)に合わせる処理を実施する。なお、3Dセンサビームスケジューリング処理部7はセンサ制御手段を構成している。
3Dセンサ8はビームを目標に照射して、目標の3次元角度(距離、仰角、方位角)を測位する3次元センサである。
【0012】
次に動作について説明する。
2Dセンサ1は、ビームを目標に照射して、その目標の2次元角度(目標の仰角、方位角)を測位し、目標の仰角と方位角を同一軌道判定処理部3及び発射諸元推定処理部4に出力する。
【0013】
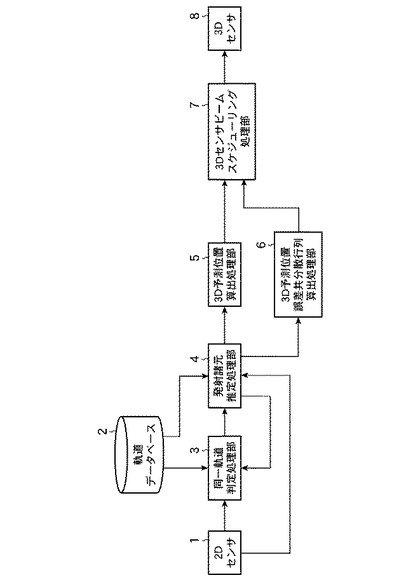
ここで、図2は2Dセンサ1により測位された目標の2次元角度の観測値を示す概念図である。
図において、Aは目標の真値、Bは2Dセンサ1により測位された観測値、Cは2Dセンサ1の観測誤差を表している。
したがって、2Dセンサ1により測位された観測値Bは、目標の真値Aに観測誤差Cを付加したものに相当する。
【0014】
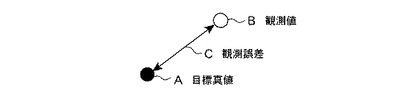
図3は2Dセンサ1により測位された観測値Bに関連する2D角度観測誤差共分散行列を示す概念図である。
図において、Aは目標の真値、C1は2Dセンサ1の仰角観測誤差、C2は2Dセンサ1の方位角観測誤差、C3は2Dセンサ1の観測誤差の1σライン(観測誤差のばらつく範囲)を表している。
観測誤差共分散行列は、目標の真値Aを中心として、仰角観測誤差C1及び方位角観測誤差C2を長径又は短径に持つ楕円を表している。
なお、図3の例では、仰角と方位角が観測される場合の2次元の観測誤差共分散行列を示しているが、距離、仰角及び方位角が観測される場合の3次元の観測誤差共分散行列は3次元の楕円体になる。
【0015】
軌道データベース2は、予め、目標の軌道(例えば、目標の発射時刻、高度、ダウンレンジなど)を示す軌道テンプレートを記憶しており、後述する同一軌道判定処理部3及び発射諸元推定処理部4が軌道データベース2に記憶されている軌道テンプレートを参照する。
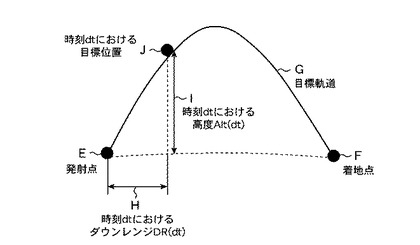
ここで、図4は軌道データベース2に記憶されている軌道テンプレートを示すイメージ図である。
図において、Eは目標の発射点、Fは目標の着地点、Gは目標軌道、Hは時刻dtにおけるダウンレンジDR(dt)、Iは時刻dtにおける目標の高度Alt(dt)、Jは時刻dtにおける目標位置を表している。ただし、ダウンレンジDR(dt)及び高度Alt(dt)は、時刻dtの関数である。
なお、軌道データベース2には、時刻dt、ダウンレンジDR(dt)及び高度Alt(dt)などが組み合わされて構成されている軌道テンプレートが複数記憶されているものとする。
【0016】
同一軌道判定処理部3は、2Dセンサ1から目標の2次元角度の観測値を受けると、軌道データベース2に記憶されている軌道テンプレートを収集するとともに、発射諸元推定処理部4から目標の発射諸元パラメータ(例えば、目標の発射点の緯度、経度、高度、右昇天角、赤緯、目標の速度ベクトルのヘディングなど)を収集する。
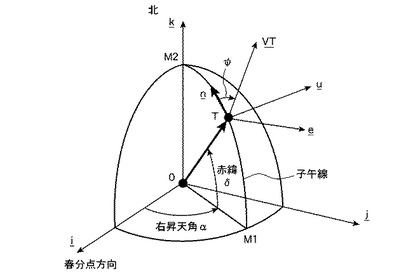
ここで、図5は発射諸元パラメータにおける右昇天角、赤緯及び目標の速度ベクトルを示す説明図である。
図5において、i,j,kは地心座標における各軸を表しており、iは春分点方向の軸、kは北方向の軸、jはi軸及びj軸と直交する軸である。地心座標における原点はOである。
また、n,e,uは目標を原点とする北基準直交座標の各軸を表しており、nは北方向の軸、e軸は東方向の軸、uは天頂方向の軸を表している。目標を原点とする北基準直交座標の原点はTである。
さらに、O、M1、M2を含む面とi軸のなす角を右昇天角αとし、O、M1、M2を含む面内において、OM1とOTのなす角を赤緯δと定義する。
そして、目標の速度ベクトルをVTとするとき、速度ベクトルVTとn軸のなす角をΨと定義する。
【0017】
同一軌道判定処理部3は、上記のようにして、軌道テンプレートと発射諸元パラメータを収集すると、その軌道テンプレートと発射諸元パラメータを用いて、目標の3次元予測軌道(各時刻における目標の3次元予測位置を示す点の集合)を算出する。なお、軌道テンプレートと発射諸元パラメータを用いて、目標の3次元予測軌道を算出方法は、公知の算出方法であるため詳細な説明を省略する。
同一軌道判定処理部3は、目標の3次元予測軌道を算出すると、その3次元予測軌道を2Dセンサ基準の極座標に座標変換することにより、2Dセンサ基準の極座標における2次元角度を予測する。
【0018】
同一軌道判定処理部3は、2Dセンサ基準の極座標における2次元角度を予測すると、その2次元角度の予測値と2Dセンサ1により測位された2次元角度の観測値との差異が許容範囲内にあるか否かを判定する。
即ち、同一軌道判定処理部3は、最初に、適合度検定に関する下記の式(1)を演算することにより、2次元角度の予測値と2次元角度の観測値との同一性を表す統計量Sを求める。
【数1】

【0019】
式(1)において、Ep(i)はi番目の2Dセンサ基準の仰角予測値、Azp(i)はi番目の2Dセンサ基準の方位角予測値、Eo(i)は2Dセンサ1により測位された仰角観測値、Azo(i)は2Dセンサ1により測位された方位角観測値、σE(i)はi番目の仰角観測精度、σAz(i)はi番目の方位角精度、nは適合度検定を行うサンプル数である。
なお、2次元角度の予測値は上記の仰角予測値と方位角予測値からなり、2次元角度の観測値は上記の仰角観測値と方位角観測値からなる。
2次元角度の予測値と2次元角度の観測値とが同一である可能性が高い場合には、統計量Sの値が小さくなる。
【0020】
同一軌道判定処理部3は、上記のようにして統計量Sを求めると、その統計量Sを予め設定された閾値Sthと比較する。
ただし、統計量Sは、自由度n−1のカイ2乗分布に従うため、自由度n−1と有意水準を決めて、カイ2乗分布の閾値Sthが算出される。
S≦Sth (2)
【0021】
同一軌道判定処理部3は、統計量Sが閾値Sth以下であって、式(2)が成立すれば、2次元角度の予測値と2Dセンサ1により測位された2次元角度の観測値との差異が許容範囲内にあると認定する。
一方、統計量Sが閾値Sthより大きくて、式(2)が成立しなければ、許容範囲外であると認定して、発射諸元推定処理部4から別の発射諸元パラメータ(発射諸元推定処理部4により更新された発射諸元パラメータ)を収集し、式(2)が成立するまで、繰り返し、更新後の発射諸元パラメータを用いて、式(1)の統計量Sを演算する。
【0022】
なお、同一軌道判定処理部3は、式(2)が成立して、許容範囲内にあると認定すると、発射諸元パラメータの確定信号と、統計量Sの算出に使用した2次元角度の予測値及び観測値とを発射諸元推定処理部4に出力する。
一方、式(2)が成立しないで、許容範囲外であると認定すると、別の発射諸元パラメータの送信要求と、統計量Sの算出に使用した2次元角度の予測値及び観測値とを発射諸元推定処理部4に出力する。
因みに、2次元角度の予測値及び観測値には、時刻情報が付加されている。
【0023】
発射諸元推定処理部4は、同一軌道判定処理部3が許容範囲外であると認定して、同一軌道判定処理部3から別の発射諸元パラメータの送信要求と、統計量Sの算出に使用した2次元角度の予測値及び観測値とを受けると、前回送信済みの発射諸元パラメータを更新して、更新後の発射諸元パラメータを同一軌道判定処理部3に送信する。
【0024】
即ち、発射諸元推定処理部4は、同一軌道判定処理部3から別の発射諸元パラメータの送信要求を受けると、下記の式(3)に示すように、前回送信済みの発射諸元パラメータqoに、発射諸元パラメータの増分Δqを加算することにより、新たな発射諸元パラメータqnを算出し、新たな発射諸元パラメータqnを同一軌道判定処理部3に送信する。
qn=qo+Δq (3)
【0025】
以下、発射諸元パラメータの増分Δqの算出処理について説明する。
発射諸元推定処理部4は、下記の式(4)の観測モデルや、下記の式(5)〜式(12)を用いて、発射諸元パラメータの増分Δqを最小2乗法によって算出する。
z=h(q)+v (4)
式(4)において、zは2次元角度の観測値、h(q)は2次元角度の真値、vは2次元角度の観測雑音、qは発射諸元パラメータの真値である。
【0026】
ここで、2次元角度の観測値zの観測誤差共分散行列Rは、下記の式(5)で表される。
【数2】
式(5)において、σEは仰角観測誤差、σAzは方位角観測誤差である。これらの値は、2次元角度の観測値zが得られた時刻によって時変する。
【0027】
また、2次元角度の観測値zと、2次元角度の真値h(q)との残差をΔzと定義し、観測行列をHと定義する。
ただし、ΔzはKサンプリング分の2次元角度の観測値zと、2次元角度の真値h(q)との残差を表し、Kは1以上の自然数である。
観測行列Hは、下記の式(6)によって算出する。
H=∂h(q)/∂q (6)
なお、式(6)は、h(q)をqで偏微分すると、観測行列Hが求まることを表している。∂は偏微分の演算子である。
【0028】
発射諸元パラメータの増分Δqは、下記の式(7)より求まる。
Δq=(Pq)a (7)
式(7)において、Pqは下記の式(8)で表され、aは下記の式(9)で表される。
ただし、式(8)のPqは発射諸元パラメータの増分Δqの誤差共分散行列を表している。
Pq={(H∧T)(R∧−1)H}∧−1 (8)
a=(R∧−1)(H∧T)H}Δz (9)
式(8)(9)において、「∧−1」は行列の逆行列を意味し、記号「∧T」はベクトル及び行列の転置を意味している。
【0029】
ここで、Kサンプリング分の2次元角度の観測値zを想定し、発射諸元パラメータqの次数をNとすると、観測行列Hは下記の式(10)のように表すことができる。
【数3】
式(10)において、q(1)、・・・、q(N)は、発射諸元パラメータqの各成分を表している。また、E(1)は1番目の2次元角度の真値の仰角成分を表し、Az(1)は1番目の2次元角度の真値の方位角成分を表している。
同様に、E(K)はK番目の2次元角度の真値の仰角成分を表し、Az(K)はK番目の2次元角度の真値の方位角成分を表している。
【0030】
また、式(8)のPqのi行j列成分Pq(i,j)は、下記の式(11)により算出することができる。
【数4】
式(11)において、σE(k)はk番目の仰角観測誤差、σAz(k)はk番目の方位角観測誤差を表している。
【0031】
また、式(9)におけるaのi番目の成分a(i)は、下記の式(12)により算出することができる。
【数5】
【0032】
発射諸元推定処理部4は、上記のように、式(4)〜式(12)を用いて、発射諸元パラメータの増分Δqを最小2乗法によって算出すると、発射諸元パラメータの増分Δqを式(3)に代入して、新たな発射諸元パラメータqnを算出し、新たな発射諸元パラメータqnを同一軌道判定処理部3に送信する。
【0033】
次に、発射諸元推定処理部4は、同一軌道判定処理部3が許容範囲内であると認定して、同一軌道判定処理部3から発射諸元パラメータの確定信号と、統計量Sの算出に使用した2次元角度の予測値及び観測値とを受けると、式(8)を使用して、前回送信済みの発射諸元パラメータ(同一軌道判定処理部3で最後に使用された発射諸元パラメータ)の誤差共分散行列Pqを算出し、その発射諸元パラメータの誤差共分散行列Pqを3D予測位置誤差共分散行列算出処理部6に出力する。発射諸元パラメータの誤差共分散行列Pqには、時刻情報が付加されている。
また、発射諸元推定処理部4は、前回送信済みの発射諸元パラメータ(同一軌道判定処理部3で最後に使用された発射諸元パラメータ)と、軌道テンプレートと、2Dセンサ基準の極座標における2次元角度の予測値とを3D予測位置算出処理部5に出力する。
【0034】
3D予測位置算出処理部5は、発射諸元推定処理部4から前回送信済みの発射諸元パラメータと軌道テンプレートと2次元角度の予測値とを受けると、同一軌道判定処理部3と同様に、その発射諸元パラメータと軌道テンプレートを用いて、目標の3次元予測軌道(各時刻における目標の3次元予測位置を示す点の集合)を算出する。
3D予測位置算出処理部5は、目標の3次元予測軌道を算出すると、その3次元予測軌道を構成している各時刻における目標の3次元予測位置を2Dセンサ基準の極座標に座標変換することにより、各時刻における目標の仰角及び方位角の情報を取得する。
【0035】
3D予測位置算出処理部5は、各時刻における目標の仰角及び方位角の情報を取得すると、各時刻における目標の仰角及び方位角の中から、2次元角度の予測値に対応する目標の仰角及び方位角を検索し、その目標の仰角及び方位角の取得元の3次元予測位置を特定する。
3D予測位置算出処理部5は、上記のようにして、2次元角度の予測値と発射諸元パラメータの両方に対応する3次元予測位置を特定すると、その3次元予測位置を3Dセンサ基準の3次元予測位置z3Dに座標変換し、3Dセンサ基準の3次元予測位置z3Dを3Dセンサビームスケジューリング処理部7に出力する。このとき、3Dセンサ基準の3次元予測位置z3Dには時刻情報が付加されている。
【0036】
ここでは、3D予測位置算出処理部5が2次元角度の予測値と発射諸元パラメータの両方に対応する3次元予測位置を特定するものについて示したが、同一軌道判定処理部3又は発射諸元推定処理部4が2次元角度の予測値と発射諸元パラメータの両方に対応する3次元予測位置を特定して、3D予測位置算出処理部5が同一軌道判定処理部3又は発射諸元推定処理部4から2次元角度の予測値と発射諸元パラメータの両方に対応する3次元予測位置を収集するようにしてもよい。
【0037】
3D予測位置誤差共分散行列算出処理部6は、発射諸元推定処理部4から発射諸元パラメータの誤差共分散行列Pqを受けると、発射諸元パラメータの誤差共分散行列Pqから目標の発射位置zl(発射点の緯度、経度、高度)の誤差共分散行列Plを抽出する。
3D予測位置誤差共分散行列算出処理部6は、目標の発射位置zlの誤差共分散行列Plを抽出すると、その発射位置zlの誤差共分散行列Plを目標の3次元予測軌道に沿って3次元予測位置z3Dの時刻まで外挿する。
ただし、3次元予測軌道は、3D予測位置算出処理部5と同様にして、発射諸元パラメータと軌道テンプレートから算出するようにしてもよいし、同一軌道判定処理部3又は発射諸元推定処理部4から収集するようにしてもよい。
【0038】
3D予測位置誤差共分散行列算出処理部6は、発射位置zlの誤差共分散行列Plを目標の3次元予測軌道に沿って3次元予測位置z3Dの時刻まで外挿すると、外挿後の発射位置zlの誤差共分散行列Plを3Dセンサ基準の座標系に座標変換して、3Dセンサ基準の3次元予測位置誤差共分散行列P3Dを算出し、その3次元予測位置誤差共分散行列P3Dを3Dセンサビームスケジューリング処理部7に出力する。このとき、3Dセンサ基準の3次元予測位置誤差共分散行列P3Dには時刻情報が付加されている。
なお、3Dセンサ基準の3次元予測位置誤差共分散行列P3Dは、3Dセンサ8のビーム指向範囲に相当する。
【0039】
3Dセンサビームスケジューリング処理部7は、3D予測位置算出処理部5から3Dセンサ基準の3次元予測位置z3Dを受け、3D予測位置誤差共分散行列算出処理部6から3Dセンサ基準の3次元予測位置誤差共分散行列P3Dを受けると、その3次元予測位置z3Dと3次元予測位置誤差共分散行列P3Dを用いて、3Dセンサ8のビームスケジュールを作成する。
即ち、3Dセンサビームスケジューリング処理部7は、3Dセンサ8から照射されるビームの中心を3次元予測位置z3Dに設定して、3Dセンサ8のビーム指向範囲を3次元予測位置誤差共分散行列P3Dに設定し、3Dセンサ8がビーム指向範囲内を指向するようにビームスケジュールを作成する。
【0040】
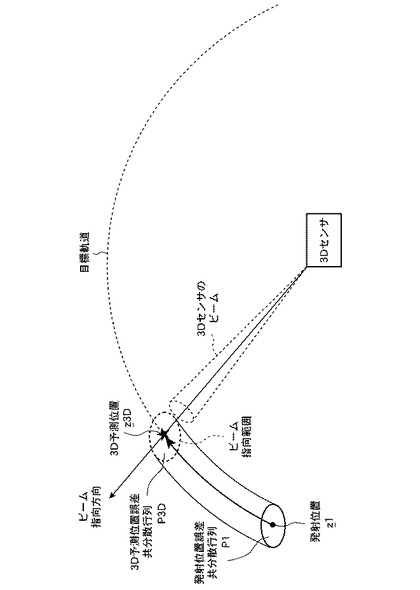
図6は3Dセンサ基準の3次元予測位置z3Dと、3Dセンサ基準の3次元予測位置誤差共分散行列P3Dと、ビームスケジュールとの関係を示す説明図である。
図6では、発射位置zlの誤差共分散行列Plを目標の3次元予測軌道に沿って所望の時刻まで外挿することにより、3Dセンサ基準の3次元予測位置z3Dと、3Dセンサ基準の3次元予測位置誤差共分散行列P3Dを求める様子を表している。
図6に示すように、3次元予測位置z3Dが3Dセンサ8のビーム指向方向に相当し、3次元予測位置誤差共分散行列P3Dがビーム指向範囲に相当することから、3Dセンサ8が3次元予測位置z3Dを中心とする3次元予測位置誤差共分散行列P3Dの領域内にビームを撃つようにスケジュールが作成される。
【0041】
3Dセンサ8は、3Dセンサビームスケジューリング処理部7により作成されたビームスケジュールにしたがってビームを照射して、目標の3次元角度(距離、仰角、方位角)を測位する。
【0042】
以上で明らかなように、この実施の形態1によれば、軌道データベース2に記憶されている軌道テンプレートと目標の発射諸元パラメータを用いて目標の2次元角度を予測し、その2次元角度の予測値と2次元センサ1により測位された2次元角度の観測値との差異が許容範囲内にあるか否かを判定する予測判定処理を実施する同一軌道判定処理部3と、同一軌道判定処理部3の判定結果が許容範囲外である旨を示す場合、その発射諸元パラメータを更新し、更新後の発射諸元パラメータを同一軌道判定処理部3に出力して、再度の予測判定処理を実施させる一方、同一軌道判定処理部3の判定結果が許容範囲内である旨を示す場合、その発射諸元パラメータを用いて目標の3次元位置を予測する予測手段(発射諸元推定処理部4、3D予測位置算出処理部5)とを設け、3Dセンサビームスケジューリング処理部7が3次元センサ8のビーム指向方向を3D予測位置算出処理部5により予測された3次元位置に合わせるように構成したので、3次元センサ8のビーム指向方向を適正に制御して、3次元センサ8の3次元角度の測位精度を高めることができる効果を奏する。
【0043】
また、この実施の形態1によれば、同一軌道判定処理部3の判定結果が許容範囲内である旨を示す場合、3D予測位置誤差共分散行列算出処理部6が発射諸元パラメータの誤差共分散行列Pqから3次元センサ8のビーム指向範囲を演算し、3Dセンサビームスケジューリング処理部7が3次元センサ8のビーム指向範囲を3D予測位置誤差共分散行列算出処理部6により演算されたビーム指向範囲に合わせるように構成したので、3次元センサ8が必要な範囲にビームを照射することができる効果を奏する。
【0044】
実施の形態2.
図7はこの発明の実施の形態2によるセンサ制御装置を示す構成図であり、図において、図1と同一符号は同一または相当部分を示すので説明を省略する。
ビーム指向範囲制御処理部9は3Dセンサビームスケジューリング処理部7から3D予測位置誤差共分散行列算出処理部6により算出された3Dセンサ基準の3次元予測位置誤差共分散行列P3Dに基づいて矩形範囲を設定し、その矩形範囲内の複数個所に3次元センサ8のビーム指向方向が合うように、ビームスケジュールの作成を3Dセンサビームスケジューリング処理部7に指示する。なお、ビーム指向範囲制御処理部9はセンサ制御手段を構成している。
【0045】
上記実施の形態1では、3Dセンサビームスケジューリング処理部7が、3Dセンサ8が3次元予測位置z3Dを中心とする3次元予測位置誤差共分散行列P3Dの領域内にビームを撃つようにスケジュールを作成するものについて示したが、この実施の形態2では、3Dセンサ8が実際に照射するビームの位置を具体的に決定するものについて説明する。
【0046】
ビーム指向範囲制御処理部9は、3Dセンサビームスケジューリング処理部7から3D予測位置誤差共分散行列算出処理部6により算出された3Dセンサ基準の3次元予測位置誤差共分散行列P3Dを入力する。
ビーム指向範囲制御処理部9は、3Dセンサ基準の3次元予測位置誤差共分散行列P3Dを入力すると、その3次元予測位置誤差共分散行列P3Dの座標系を、3Dセンサ基準の直交座標から3Dセンサ基準の極座標に変換する。
【0047】
ビーム指向範囲制御処理部9は、上記のようにして座標変換を実施すると、3Dセンサ基準の極座標の3D予測位置誤差共分散行列P3D_POLについて、代数学における対角化処理を行うことにより、極座標の3D予測位置誤差共分散行列P3D_POLにおける固有ベクトルと固有値を算出する。
ビーム指向範囲制御処理部9は、極座標の3D予測位置誤差共分散行列P3D_POLにおける固有ベクトルと固有値を算出すると、その固有値の大きさを基準にして、3Dセンサ基準の極座標の3D予測位置誤差共分散行列P3D_POLを覆う矩形範囲を設定する。
【0048】
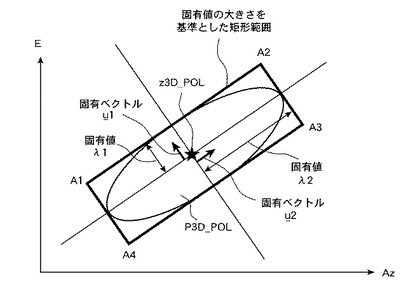
ここで、図8は3Dセンサ基準の極座標の3D予測位置誤差共分散行列P3D_POLを仰角、方位角から見ている説明図である。
図8において、z3D_POLは3Dセンサ基準の極座標の3次元予測位置、P3D_POLは3Dセンサ基準の極座標の3次元予測位置誤差共分散行列である。
また、λ1,λ2は3Dセンサ基準の極座標の3D予測位置誤差共分散行列P3D_POLの固有値、u1,u2は3Dセンサ基準の極座標の3D予測位置誤差共分散行列P3D_POLの固有ベクトルである。
3D予測位置誤差共分散行列P3D_POLの固有値λ1,λ2は矩形の辺の半長径あるいは半短径に相当し、固有ベクトルu1,u2は長方形の仰角軸および方位角軸に対する傾きに相当する。
なお、3Dセンサ基準の極座標の3D予測位置誤差共分散行列P3D_POLを覆う矩形範囲は、点A1,A2,A3,A4を結ぶ範囲である。
【0049】
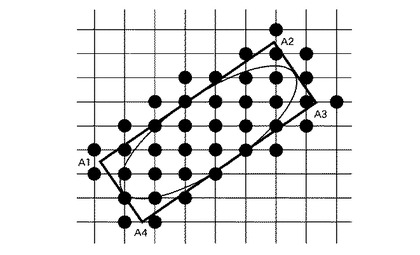
ビーム指向範囲制御処理部9は、3Dセンサ基準の極座標の3D予測位置誤差共分散行列P3D_POLを覆う矩形範囲を設定すると、図9に示すように、その矩形範囲に対して、事前に指定された間隔で、仰角方向と方位角方向にメッシュを切り、そのメッシュ同士の交点と、そのメッシュと長方形の各辺との交点を求める(図9の●を参照)。
ビーム指向範囲制御処理部9は、上記のようにして、交点を求めると、その矩形範囲内にある複数の交点にビームが照射されるように、ビームスケジュールの作成を3Dセンサビームスケジューリング処理部7に指示する。
これにより、3Dセンサビームスケジューリング処理部7は、例えば、矩形範囲内の交点を順番又は同時にビームを照射するようなビームスケジュールを作成する。
【0050】
以上で明らかなように、この実施の形態2によれば、3D予測位置誤差共分散行列算出処理部6により算出された3Dセンサ基準の3次元予測位置誤差共分散行列P3Dに基づいて矩形範囲を設定し、その矩形範囲内の複数個所に3次元センサ8のビーム指向方向を合わせるように構成したので、必要なビーム指向範囲を網羅しつつ、ビームの効率的なリソースマネージメントを行うことができる効果を奏する。
【0051】
実施の形態3.
図10はこの発明の実施の形態3によるセンサ制御装置を示す構成図であり、図において、図1と同一符号は同一または相当部分を示すので説明を省略する。
処理停止制御部10は3D予測位置算出処理部5により算出された3Dセンサ基準の3次元予測位置z3Dを参照して3Dセンサ8と目標間の距離を求め、3Dセンサ8と目標間の距離が予め設定された距離範囲を逸脱している場合、3D予測位置誤差共分散行列算出処理部6における誤差共分散行列の算出処理と、3Dセンサビームスケジューリング処理部7におけるビームスケジュールの作成処理を停止させる処理を実施する。なお、処理停止制御部10は処理停止手段を構成している。
【0052】
上記実施の形態1,2では、3Dセンサ8と目標間の距離が長い場合でも、3Dセンサ8がビームを目標に照射するものについて示したが、3Dセンサ8と目標間の距離が長くなると、3Dセンサ8のビームが目標まで届かなくなることがある。この場合には、目標の3次元角度を測位することができないため、3Dセンサ8が無駄なビームを照射していることになる。
そこで、この実施の形態3では、3Dセンサ8と目標間の距離が予め設定された距離範囲を逸脱すると、3Dセンサ8が無駄なビームの照射を行わないようにしている。
【0053】
具体的には、以下の通りである。
処理停止制御部10は、3D予測位置算出処理部5が3Dセンサ基準の3次元予測位置z3Dを算出すると、その3次元予測位置z3Dを参照して、3Dセンサ8と目標間の距離を求める。
処理停止制御部10は、3Dセンサ8と目標間の距離と予め設定された距離範囲を比較し、3Dセンサ8と目標間の距離が予め設定された距離範囲を逸脱していれば、3D予測位置誤差共分散行列算出処理部6における誤差共分散行列の算出処理を停止させるとともに、3Dセンサビームスケジューリング処理部7におけるビームスケジュールの作成処理を停止させる。
【0054】
以上で明らかなように、この実施の形態3によれば、3D予測位置算出処理部5により算出された3Dセンサ基準の3次元予測位置z3Dを参照して3Dセンサ8と目標間の距離を求め、3Dセンサ8と目標間の距離が予め設定された距離範囲を逸脱している場合、3D予測位置誤差共分散行列算出処理部6における誤差共分散行列の算出処理と、3Dセンサビームスケジューリング処理部7におけるビームスケジュールの作成処理を停止させるように構成したので、無駄な処理を省略することができるようになり、システム全体の処理負荷を軽減することができる効果を奏する。
【0055】
実施の形態4.
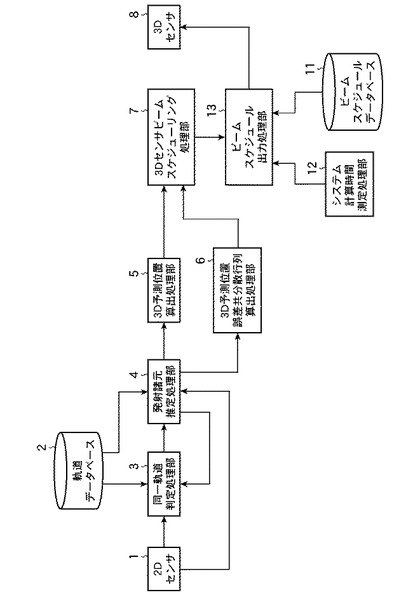
図11はこの発明の実施の形態4によるセンサ制御装置を示す構成図であり、図において、図1と同一符号は同一または相当部分を示すので説明を省略する。
ビームスケジュールデータベース11は事前に設定された3Dセンサ8のビーム指向方向とビーム指向範囲を実現するビームスケジュールを記憶しているメモリである。なお、3Dセンサ8のビーム指向方向とビーム指向範囲は、事前に2Dセンサ1のプラットホームの位置を変えて、3Dセンサ8のビームをどの方向に何本撃つかを計算して決められている。
システム計算時間測定処理部12はセンサ制御装置の各処理部の処理時間(例えば、3Dセンサビームスケジューリング処理部7におけるビームスケジュールの作成処理時間、3D予測位置算出処理部5における3次元予測位置の算出処理時間、3D予測位置誤差共分散行列算出処理部6における誤差共分散行列の算出処理時間)をそれぞれ測定する。
【0056】
ビームスケジュール出力処理部13はシステム計算時間測定処理部12により測定された何れの処理時間も予め設定された制限時間を越えていなければ、3Dセンサビームスケジューリング処理部7により作成されたビームスケジュールにしたがって3Dセンサ8のビームを制御し、システム計算時間測定処理部12により測定された何れかの処理時間が予め設定された制限時間を越えると、ビームスケジュールデータベース11に記憶されているビームスケジュールにしたがって3Dセンサ8のビームを制御する。
なお、3Dセンサビームスケジューリング処理部7、ビームスケジュールデータベース11、システム計算時間測定処理部12及びビームスケジュール出力処理部13からセンサ制御手段が構成されている。
【0057】
上記実施の形態1〜3では、3Dセンサビームスケジューリング処理部7により作成されたビームスケジュールにしたがって3Dセンサ8のビームを制御するものについて示したが、3Dセンサビームスケジューリング処理部7により作成されたビームスケジュール、または、事前に設定されたビームスケジュールにしたがって3Dセンサ8のビームを制御するようにしてもよい。
【0058】
具体的には、以下の通りである。
システム計算時間測定処理部12は、センサ制御装置の各処理部の処理時間をそれぞれ測定する。
例えば、3Dセンサビームスケジューリング処理部7におけるビームスケジュールの作成処理時間、3D予測位置算出処理部5における3次元予測位置の算出処理時間、3D予測位置誤差共分散行列算出処理部6における誤差共分散行列の算出処理時間をそれぞれ測定する。
【0059】
ビームスケジュール出力処理部13は、システム計算時間測定処理部12により測定された何れの処理時間も予め設定された制限時間を越えていなければ、上記実施の形態1〜3と同様に、3Dセンサビームスケジューリング処理部7により作成されたビームスケジュールにしたがって3Dセンサ8のビームを制御する。
しかし、システム計算時間測定処理部12により測定された何れかの処理時間が予め設定された制限時間を越えている場合、3Dセンサビームスケジューリング処理部7により作成されたビームスケジュールでは、想定通りのビーム制御を実施することができず、3Dセンサ8における測位精度が劣化することが予想される。
そこで、ビームスケジュール出力処理部13は、システム計算時間測定処理部12により測定された何れかの処理時間が予め設定された制限時間を越えた場合には、ビームスケジュールデータベース11に記憶されているビームスケジュールにしたがって3Dセンサ8のビームを制御するようにする。
【0060】
以上で明らかなように、この実施の形態4によれば、システム計算時間測定処理部12により測定された何れの処理時間も予め設定された制限時間を越えていなければ、3Dセンサビームスケジューリング処理部7により作成されたビームスケジュールにしたがって3Dセンサ8のビームを制御し、システム計算時間測定処理部12により測定された何れかの処理時間が予め設定された制限時間を越えると、ビームスケジュールデータベース11に記憶されているビームスケジュールにしたがって3Dセンサ8のビームを制御するように構成したので、何らかの原因で何れかの処理時間が予め設定された制限時間を越える状況が発生しても、3Dセンサ8の高い測位精度を維持することができる効果を奏する。
【0061】
実施の形態5.
図12はこの発明の実施の形態5によるセンサ制御装置を示す構成図であり、図において、図1と同一符号は同一または相当部分を示すので説明を省略する。
軌道データベース14は複数の目標軌道(例えば、目標の発射時刻、緯度、経度、高度など)を複数保管しているメモリである。なお、軌道データベース14は保管手段を構成している。
予測処理部15は軌道データベース14に保管されている複数の目標軌道の中から、2Dセンサ1により測位された2次元角度の観測値と最も適合する目標軌道を選択して、その目標軌道から目標の3次元位置を予測し、その3次元位置を中心とする所定の範囲の領域内にビームを撃つようにスケジュールを作成する。なお、予測処理部15は第2予測手段を構成している。
【0062】
3Dセンサビーム制御方法選択処理部16はオペレータの設定内容にしたがって3Dセンサビームスケジューリング処理部7により作成されたビームスケジュール又は予測処理部15により作成されたビームスケジュールを選択し、選択したビームスケジュールにしたがって3Dセンサ8のビームを制御する。なお、3Dセンサビーム制御方法選択処理部16は選択受付手段を構成している。
【0063】
次に動作について説明する。
予測処理部15は、2Dセンサ1により測位された2次元角度の観測値を入力すると、軌道データベース14から複数の目標軌道を収集する。
予測処理部15は、軌道データベース14から複数の目標軌道を収集すると、複数の目標軌道の座標変換を実施することにより、複数の目標軌道をそれぞれ2Dセンサ基準の2次元角度の予測値に変換する。
【0064】
予測処理部15は、上記のようにして、複数の2次元角度の予測値を求めると、適合度検定に関する式(1)を演算することにより、複数の2次元角度の予測値と2Dセンサ1により測位された2次元角度の観測値との同一性を表す統計量Sを求める。この場合、統計量Sは、複数の目標軌道の個数分だけ求める。
予測処理部15は、複数の統計量Sを求めると、最も小さい統計量Sを選択し、その統計量Sに対応する目標軌道(当該統計量Sの演算に用いている2次元角度の予測値に対応する目標軌道)から、2Dセンサ1により測位された2次元角度の観測値の時刻に対応する目標の3次元予測位置を算出する。
【0065】
予測処理部15は、2次元角度の観測値の時刻に対応する目標の3次元予測位置を算出すると、その3次元予測位置を3Dセンサ基準の座標に変換することにより、3Dセンサ基準の3次元予測位置を算出する。なお、目標の発射位置は、最も小さい統計量Sに対応する目標軌道から一意に決まる。
予測処理部15は、3Dセンサ基準の3次元予測位置を算出すると、3Dセンサ8がその3次元予測位置を中心とする所定の範囲(事前に設定された3Dセンサ8のビーム指向範囲)の領域内にビームを撃つようなスケジュールを作成する。
【0066】
3Dセンサビーム制御方法選択処理部16は、事前に、3Dセンサビームスケジューリング処理部7により作成されたビームスケジュールを用いて、3Dセンサ8のビームを制御するのか、予測処理部15により作成されたビームスケジュールを用いて、3Dセンサ8のビームを制御するのかの設定を受け付ける。
3Dセンサビーム制御方法選択処理部16は、オペレータが上記の設定を行うと、オペレータの設定内容にしたがって3Dセンサビームスケジューリング処理部7により作成されたビームスケジュール、または、予測処理部15により作成されたビームスケジュールを選択し、選択したビームスケジュールにしたがって3Dセンサ8のビームを制御する。
【0067】
以上で明らかなように、この実施の形態5によれば、オペレータの設定内容にしたがって3Dセンサビームスケジューリング処理部7により作成されたビームスケジュール、または、予測処理部15により作成されたビームスケジュールを選択し、選択したビームスケジュールにしたがって3Dセンサ8のビームを制御するように構成したので、例えば、3D予測位置算出処理部5や3D予測位置誤差共分散行列算出処理部6の算出処理に多くの時間を要することが予想されるような状況では、オペレータの判断で、予測処理部15により作成されたビームスケジュールにしたがって3Dセンサ8のビームを制御することができるようになり、その結果、システムの抗堪性を高めることができる効果を奏する。
【0068】
実施の形態6.
図13はこの発明の実施の形態6によるセンサ制御装置を示す構成図であり、図において、図1と同一符号は同一または相当部分を示すので説明を省略する。
軌道推定処理部17は2Dセンサ1により測位された2次元角度の観測値からコーストモデルに基づいて目標の3次元予測位置を算出する。なお、軌道推定処理部17は第3予測手段を構成している。
【0069】
次に動作について説明する。
図14は軌道推定処理部17におけるコーストモデルに基づく3次元予測位置の推定処理を説明するためのイメージ図である。
図14では、発射点から着地点に移動するロケットのような目標を想定すると、目標の運動をブースト、コースト、リエントリーの3状態に分けられることを示している。
目標には推力、空気抵抗力、重力などの外力が作用し、ブースト時には、外力の中で推力が支配的となり、リエントリー時には、外力の中で空気抵抗力が支配的となる。
また、コースト時には、既にロケットの推進力を使い切って推力が働かなくなり、高度が高くて空気抵抗力の影響が少ないことから、主に外力として、重力が支配的となる。
【0070】
ここで、推力や空気抵抗力は、目標によって値が大きく異なるが、重力は、どの目標でもほとんど同じであるため、コースト時の目標運動は、下記の式(13)の運動方程式で表される。
【数6】
式(13)において、rTは図5における目標Tの地心座標における位置ベクトルを表し、μは重力定数である。
また、rTの符号の上の“・・”は、rTの2回微分を表している。
【0071】
2Dセンサ1の位置をrSとすると、2Dセンサ1の位置rSは、下記の式(14)で表される。ただし、2Dセンサ1の位置rSは既知であるものとする。
【数7】
【0072】
また、2Dセンサ1に対する目標位置をrとすると、rとrSとrTの間には、下記の式(15)の関係式が成立する。
rT=rS+r (15)
また、2Dセンサ1に対する目標位置rは、2Dセンサ1と目標間の距離、仰角及び方位角から求まる方向余弦を用いると、下記の式(16)で表される。
r=ρL (16)
【0073】
式(16)におけるρは、下記の式(17)で表され、式(16)におけるLは、下記の式(18)で表される。
ρ=|r| (17)
【数8】
【0074】
式(13)〜式(18)において、rT,rが未知、rS,Lが既知であることから、式(13)〜式(18)を用いて、rTを消去すると、rとrSとLの関係式が導出され、この関係式を解くと、rが求まる。
即ち、2Dセンサに対する目標位置rは、2Dセンサ1により測位された仰角及び方位角の観測値から求まる方向余弦Lと、既知である2Dセンサ1の位置rSとを用いて算出される。
【0075】
また、2Dセンサ1に対する目標位置rの算出後、2Dセンサ1に対する目標位置rと、既知である2Dセンサ1の位置rSから、式(15)の関係式を用いて、地心座標における目標位置rTである3次元予測位置を算出する。
この3D予測位置を3Dセンサ基準の座標系に座標変換することにより、3Dセンサ基準の3D予測位置が求まる。
【0076】
軌道推定処理部17は、最終的に、2Dセンサ1から出力されるブースト終了判定を元に、2Dセンサ1により測位された仰角及び方位角の観測値から求まる方向余弦Lと、既知である2Dセンサ1の位置rSとから、地心座標における目標位置rTを求め、その地心座標における目標位置rTを3Dセンサ基準の座標系に座標変換することにより、3Dセンサ基準の3次元予測位置を求める。
【0077】
3Dセンサビームスケジューリング処理部7は、軌道推定処理部17が3Dセンサ基準の3次元予測位置を求めると、その3次元予測位置又は3D予測位置算出処理部5により算出された3次元予測位置のいずれかを選択し、3Dセンサ8がその3次元予測位置を中心とする3次元予測位置誤差共分散行列P3Dの領域内にビームを撃つようなスケジュールを作成する。
【0078】
以上で明らかなように、この実施の形態6によれば、軌道推定処理部17が2Dセンサ1により測位された2次元角度の観測値からコーストモデルに基づいて目標の3次元予測位置を算出し、3Dセンサビームスケジューリング処理部7が軌道推定処理部17により算出された3次元予測位置又は3D予測位置算出処理部5により算出された3次元予測位置のいずれかを選択してスケジュールを作成するように構成したので、例えば、3D予測位置算出処理部5の算出処理に多くの時間を要することが予想されるような状況では、軌道推定処理部17により算出された3次元予測位置にしたがってビームスケジュールを作成することができるようになり、その結果、システムの抗堪性を高めることができる効果を奏する。
【図面の簡単な説明】
【0079】
【図1】この発明の実施の形態1によるセンサ制御装置を示す構成図である。
【図2】2Dセンサ1により測位された目標の2次元角度の観測値を示す概念図である。
【図3】2Dセンサ1により測位された観測値Bに関連する2D角度観測誤差共分散行列を示す概念図である。
【図4】軌道データベース2に記憶されている軌道テンプレートを示すイメージ図である。
【図5】発射諸元パラメータにおける右昇天角、赤緯及び目標の速度ベクトルを示す説明図である。
【図6】3Dセンサ基準の3次元予測位置z3Dと、3Dセンサ基準の3次元予測位置誤差共分散行列P3Dと、ビームスケジュールとの関係を示す説明図である。
【図7】この発明の実施の形態2によるセンサ制御装置を示す構成図である。
【図8】3Dセンサ基準の極座標の3D予測位置誤差共分散行列P3D_POLを仰角、方位角から見ている説明図である。
【図9】3Dセンサ8のビーム指向方向を示す説明図である。
【図10】この発明の実施の形態3によるセンサ制御装置を示す構成図である。
【図11】この発明の実施の形態4によるセンサ制御装置を示す構成図である。
【図12】この発明の実施の形態5によるセンサ制御装置を示す構成図である。
【図13】この発明の実施の形態6によるセンサ制御装置を示す構成図である。
【図14】軌道推定処理部17におけるコーストモデルに基づく3次元予測位置の推定処理を説明するためのイメージ図である。
【符号の説明】
【0080】
1 2Dセンサ(2次元センサ)、2 軌道データベース(記憶手段)、3 同一軌道判定処理部(判定手段)、4 発射諸元推定処理部(予測手段)、5 3D予測位置算出処理部(予測手段)、6 3D予測位置誤差共分散行列算出処理部(予測手段)、7 3Dセンサビームスケジューリング処理部(センサ制御手段)、8 3Dセンサ(3次元センサ)、9 ビーム指向範囲制御処理部(センサ制御手段)、10 処理停止制御部(処理停止手段)、11 ビームスケジュールデータベース(センサ制御手段)、12 システム計算時間測定処理部(センサ制御手段)、13 ビームスケジュール出力処理部(センサ制御手段)、14 軌道データベース(保管手段)、15 予測処理部(第2予測手段)、16 3Dセンサビーム制御方法選択処理部(選択受付手段)、17 軌道推定処理部(第3予測手段)。
【技術分野】
【0001】
この発明は、目標の3次元角度を測位する3次元センサを制御するセンサ制御装置に関するものである。
【背景技術】
【0002】
従来のセンサ制御装置は、2次元センサのビーム指向方向やビーム指向範囲を制御するものであり、3次元センサのビーム指向方向やビーム指向範囲を制御するセンサ制御装置は開発されていない(例えば、特許文献1を参照)。
因みに、2次元センサにより測位された目標の仰角と方位角の観測値を、距離、仰角及び方位角を測位する3次元センサの観測値に変換するには、2次元センサと目標間の距離情報が必要であるが、2次元センサは、距離が可観測でなく、仰角と方位角のみを測位するものであるため、従来のセンサ制御装置では、3次元センサのビーム指向方向やビーム指向範囲を制御することができない。
【0003】
【特許文献1】特開平10−160832号公報(段落番号[0018]から[0019]、図1)
【発明の開示】
【発明が解決しようとする課題】
【0004】
従来のセンサ制御装置は以上のように構成されているので、2次元センサのビーム指向方向やビーム指向範囲を制御することができても、3次元センサのビーム指向方向やビーム指向範囲を制御することができない。このため、レーダ装置が3次元センサを搭載していても、3次元センサのビーム指向方向やビーム指向範囲を適正に制御することができず、目標の3次元角度の測位精度が劣化することがあるなどの課題があった。
【0005】
この発明は上記のような課題を解決するためになされたもので、3次元センサのビーム指向方向やビーム指向範囲を適正に制御して、3次元センサの3次元角度の測位精度を高めることができるセンサ制御装置を得ることを目的とする。
【課題を解決するための手段】
【0006】
この発明に係るセンサ制御装置は、記憶手段に記憶されている軌道テンプレートと目標の発射諸元情報を用いて目標の2次元角度を予測し、その2次元角度の予測値と2次元センサにより測位された2次元角度の観測値との差異が許容範囲内にあるか否かを判定する予測判定処理を実施する判定手段と、その判定手段の判定結果が許容範囲外である旨を示す場合、その発射諸元情報を更新し、更新後の発射諸元情報を判定手段に出力して、再度の予測判定処理を実施させる一方、判定手段の判定結果が許容範囲内である旨を示す場合、その発射諸元情報を用いて目標の3次元位置を予測する予測手段とを設け、センサ制御手段が3次元センサのビーム指向方向を予測手段により予測された3次元位置に合わせるようにしたものである。
【発明の効果】
【0007】
この発明によれば、記憶手段に記憶されている軌道テンプレートと目標の発射諸元情報を用いて目標の2次元角度を予測し、その2次元角度の予測値と2次元センサにより測位された2次元角度の観測値との差異が許容範囲内にあるか否かを判定する予測判定処理を実施する判定手段と、その判定手段の判定結果が許容範囲外である旨を示す場合、その発射諸元情報を更新し、更新後の発射諸元情報を判定手段に出力して、再度の予測判定処理を実施させる一方、判定手段の判定結果が許容範囲内である旨を示す場合、その発射諸元情報を用いて目標の3次元位置を予測する予測手段とを設け、センサ制御手段が3次元センサのビーム指向方向を予測手段により予測された3次元位置に合わせるように構成したので、3次元センサのビーム指向方向を適正に制御して、3次元センサの3次元角度の測位精度を高めることができる効果がある。
【発明を実施するための最良の形態】
【0008】
実施の形態1.
図1はこの発明の実施の形態1によるセンサ制御装置を示す構成図であり、図において、2Dセンサ1はビームを目標に照射して、その目標の2次元角度(仰角、方位角)を測位する2次元センサであり、例えば、IRセンサやパッシブレーダなどが該当する。
軌道データベース2は目標の軌道(例えば、目標の発射時刻、高度、ダウンレンジなど)を示す軌道テンプレートを記憶しているメモリである。なお、軌道データベース2は記憶手段を構成している。
【0009】
同一軌道判定処理部3は軌道データベース2に記憶されている軌道テンプレートと、発射諸元推定処理部4から出力された目標の発射諸元情報である発射諸元パラメータ(例えば、目標の発射点の緯度、経度、高度、右昇天角、赤緯、目標の速度ベクトルのヘディングなど)とを用いて、目標の2次元角度を予測し、その2次元角度の予測値と2Dセンサ1により測位された2次元角度の観測値との差異が許容範囲内にあるか否かを判定する予測判定処理を実施する。なお、同一軌道判定処理部3は判定手段を構成している。
【0010】
発射諸元推定処理部4は同一軌道判定処理部3の判定結果が許容範囲外である旨を示す場合、目標の発射諸元パラメータを更新し、更新後の発射諸元パラメータを同一軌道判定処理部3に出力して、再度の予測判定処理を実施させる一方、同一軌道判定処理部3の判定結果が許容範囲内である旨を示す場合、目標の発射諸元パラメータ(更新されている場合には、更新後の発射諸元パラメータ)を3D予測位置算出処理部5及び3D予測位置誤差共分散行列算出処理部6に出力する処理を実施する。
3D予測位置算出処理部5は発射諸元推定処理部4から出力された目標の発射諸元パラメータを用いて、目標の3次元位置を予測する処理を実施する。
3D予測位置誤差共分散行列算出処理部6は発射諸元推定処理部4から出力された目標の発射諸元パラメータを用いて、3Dセンサ8のビーム指向範囲に相当する目標の3次元位置の誤差共分散行列を演算する処理を実施する。
なお、発射諸元推定処理部4、3D予測位置算出処理部5及び3D予測位置誤差共分散行列算出処理部6から予測手段が構成されている。
【0011】
3Dセンサビームスケジューリング処理部7は3Dセンサ8のビーム指向方向を3D予測位置算出処理部5により予測された3次元位置に合わせるとともに、3Dセンサ8のビーム指向範囲を3D予測位置誤差共分散行列算出処理部6により演算された3次元位置の誤差共分散行列(ビーム指向範囲)に合わせる処理を実施する。なお、3Dセンサビームスケジューリング処理部7はセンサ制御手段を構成している。
3Dセンサ8はビームを目標に照射して、目標の3次元角度(距離、仰角、方位角)を測位する3次元センサである。
【0012】
次に動作について説明する。
2Dセンサ1は、ビームを目標に照射して、その目標の2次元角度(目標の仰角、方位角)を測位し、目標の仰角と方位角を同一軌道判定処理部3及び発射諸元推定処理部4に出力する。
【0013】
ここで、図2は2Dセンサ1により測位された目標の2次元角度の観測値を示す概念図である。
図において、Aは目標の真値、Bは2Dセンサ1により測位された観測値、Cは2Dセンサ1の観測誤差を表している。
したがって、2Dセンサ1により測位された観測値Bは、目標の真値Aに観測誤差Cを付加したものに相当する。
【0014】
図3は2Dセンサ1により測位された観測値Bに関連する2D角度観測誤差共分散行列を示す概念図である。
図において、Aは目標の真値、C1は2Dセンサ1の仰角観測誤差、C2は2Dセンサ1の方位角観測誤差、C3は2Dセンサ1の観測誤差の1σライン(観測誤差のばらつく範囲)を表している。
観測誤差共分散行列は、目標の真値Aを中心として、仰角観測誤差C1及び方位角観測誤差C2を長径又は短径に持つ楕円を表している。
なお、図3の例では、仰角と方位角が観測される場合の2次元の観測誤差共分散行列を示しているが、距離、仰角及び方位角が観測される場合の3次元の観測誤差共分散行列は3次元の楕円体になる。
【0015】
軌道データベース2は、予め、目標の軌道(例えば、目標の発射時刻、高度、ダウンレンジなど)を示す軌道テンプレートを記憶しており、後述する同一軌道判定処理部3及び発射諸元推定処理部4が軌道データベース2に記憶されている軌道テンプレートを参照する。
ここで、図4は軌道データベース2に記憶されている軌道テンプレートを示すイメージ図である。
図において、Eは目標の発射点、Fは目標の着地点、Gは目標軌道、Hは時刻dtにおけるダウンレンジDR(dt)、Iは時刻dtにおける目標の高度Alt(dt)、Jは時刻dtにおける目標位置を表している。ただし、ダウンレンジDR(dt)及び高度Alt(dt)は、時刻dtの関数である。
なお、軌道データベース2には、時刻dt、ダウンレンジDR(dt)及び高度Alt(dt)などが組み合わされて構成されている軌道テンプレートが複数記憶されているものとする。
【0016】
同一軌道判定処理部3は、2Dセンサ1から目標の2次元角度の観測値を受けると、軌道データベース2に記憶されている軌道テンプレートを収集するとともに、発射諸元推定処理部4から目標の発射諸元パラメータ(例えば、目標の発射点の緯度、経度、高度、右昇天角、赤緯、目標の速度ベクトルのヘディングなど)を収集する。
ここで、図5は発射諸元パラメータにおける右昇天角、赤緯及び目標の速度ベクトルを示す説明図である。
図5において、i,j,kは地心座標における各軸を表しており、iは春分点方向の軸、kは北方向の軸、jはi軸及びj軸と直交する軸である。地心座標における原点はOである。
また、n,e,uは目標を原点とする北基準直交座標の各軸を表しており、nは北方向の軸、e軸は東方向の軸、uは天頂方向の軸を表している。目標を原点とする北基準直交座標の原点はTである。
さらに、O、M1、M2を含む面とi軸のなす角を右昇天角αとし、O、M1、M2を含む面内において、OM1とOTのなす角を赤緯δと定義する。
そして、目標の速度ベクトルをVTとするとき、速度ベクトルVTとn軸のなす角をΨと定義する。
【0017】
同一軌道判定処理部3は、上記のようにして、軌道テンプレートと発射諸元パラメータを収集すると、その軌道テンプレートと発射諸元パラメータを用いて、目標の3次元予測軌道(各時刻における目標の3次元予測位置を示す点の集合)を算出する。なお、軌道テンプレートと発射諸元パラメータを用いて、目標の3次元予測軌道を算出方法は、公知の算出方法であるため詳細な説明を省略する。
同一軌道判定処理部3は、目標の3次元予測軌道を算出すると、その3次元予測軌道を2Dセンサ基準の極座標に座標変換することにより、2Dセンサ基準の極座標における2次元角度を予測する。
【0018】
同一軌道判定処理部3は、2Dセンサ基準の極座標における2次元角度を予測すると、その2次元角度の予測値と2Dセンサ1により測位された2次元角度の観測値との差異が許容範囲内にあるか否かを判定する。
即ち、同一軌道判定処理部3は、最初に、適合度検定に関する下記の式(1)を演算することにより、2次元角度の予測値と2次元角度の観測値との同一性を表す統計量Sを求める。
【数1】
【0019】
式(1)において、Ep(i)はi番目の2Dセンサ基準の仰角予測値、Azp(i)はi番目の2Dセンサ基準の方位角予測値、Eo(i)は2Dセンサ1により測位された仰角観測値、Azo(i)は2Dセンサ1により測位された方位角観測値、σE(i)はi番目の仰角観測精度、σAz(i)はi番目の方位角精度、nは適合度検定を行うサンプル数である。
なお、2次元角度の予測値は上記の仰角予測値と方位角予測値からなり、2次元角度の観測値は上記の仰角観測値と方位角観測値からなる。
2次元角度の予測値と2次元角度の観測値とが同一である可能性が高い場合には、統計量Sの値が小さくなる。
【0020】
同一軌道判定処理部3は、上記のようにして統計量Sを求めると、その統計量Sを予め設定された閾値Sthと比較する。
ただし、統計量Sは、自由度n−1のカイ2乗分布に従うため、自由度n−1と有意水準を決めて、カイ2乗分布の閾値Sthが算出される。
S≦Sth (2)
【0021】
同一軌道判定処理部3は、統計量Sが閾値Sth以下であって、式(2)が成立すれば、2次元角度の予測値と2Dセンサ1により測位された2次元角度の観測値との差異が許容範囲内にあると認定する。
一方、統計量Sが閾値Sthより大きくて、式(2)が成立しなければ、許容範囲外であると認定して、発射諸元推定処理部4から別の発射諸元パラメータ(発射諸元推定処理部4により更新された発射諸元パラメータ)を収集し、式(2)が成立するまで、繰り返し、更新後の発射諸元パラメータを用いて、式(1)の統計量Sを演算する。
【0022】
なお、同一軌道判定処理部3は、式(2)が成立して、許容範囲内にあると認定すると、発射諸元パラメータの確定信号と、統計量Sの算出に使用した2次元角度の予測値及び観測値とを発射諸元推定処理部4に出力する。
一方、式(2)が成立しないで、許容範囲外であると認定すると、別の発射諸元パラメータの送信要求と、統計量Sの算出に使用した2次元角度の予測値及び観測値とを発射諸元推定処理部4に出力する。
因みに、2次元角度の予測値及び観測値には、時刻情報が付加されている。
【0023】
発射諸元推定処理部4は、同一軌道判定処理部3が許容範囲外であると認定して、同一軌道判定処理部3から別の発射諸元パラメータの送信要求と、統計量Sの算出に使用した2次元角度の予測値及び観測値とを受けると、前回送信済みの発射諸元パラメータを更新して、更新後の発射諸元パラメータを同一軌道判定処理部3に送信する。
【0024】
即ち、発射諸元推定処理部4は、同一軌道判定処理部3から別の発射諸元パラメータの送信要求を受けると、下記の式(3)に示すように、前回送信済みの発射諸元パラメータqoに、発射諸元パラメータの増分Δqを加算することにより、新たな発射諸元パラメータqnを算出し、新たな発射諸元パラメータqnを同一軌道判定処理部3に送信する。
qn=qo+Δq (3)
【0025】
以下、発射諸元パラメータの増分Δqの算出処理について説明する。
発射諸元推定処理部4は、下記の式(4)の観測モデルや、下記の式(5)〜式(12)を用いて、発射諸元パラメータの増分Δqを最小2乗法によって算出する。
z=h(q)+v (4)
式(4)において、zは2次元角度の観測値、h(q)は2次元角度の真値、vは2次元角度の観測雑音、qは発射諸元パラメータの真値である。
【0026】
ここで、2次元角度の観測値zの観測誤差共分散行列Rは、下記の式(5)で表される。
【数2】
式(5)において、σEは仰角観測誤差、σAzは方位角観測誤差である。これらの値は、2次元角度の観測値zが得られた時刻によって時変する。
【0027】
また、2次元角度の観測値zと、2次元角度の真値h(q)との残差をΔzと定義し、観測行列をHと定義する。
ただし、ΔzはKサンプリング分の2次元角度の観測値zと、2次元角度の真値h(q)との残差を表し、Kは1以上の自然数である。
観測行列Hは、下記の式(6)によって算出する。
H=∂h(q)/∂q (6)
なお、式(6)は、h(q)をqで偏微分すると、観測行列Hが求まることを表している。∂は偏微分の演算子である。
【0028】
発射諸元パラメータの増分Δqは、下記の式(7)より求まる。
Δq=(Pq)a (7)
式(7)において、Pqは下記の式(8)で表され、aは下記の式(9)で表される。
ただし、式(8)のPqは発射諸元パラメータの増分Δqの誤差共分散行列を表している。
Pq={(H∧T)(R∧−1)H}∧−1 (8)
a=(R∧−1)(H∧T)H}Δz (9)
式(8)(9)において、「∧−1」は行列の逆行列を意味し、記号「∧T」はベクトル及び行列の転置を意味している。
【0029】
ここで、Kサンプリング分の2次元角度の観測値zを想定し、発射諸元パラメータqの次数をNとすると、観測行列Hは下記の式(10)のように表すことができる。
【数3】
式(10)において、q(1)、・・・、q(N)は、発射諸元パラメータqの各成分を表している。また、E(1)は1番目の2次元角度の真値の仰角成分を表し、Az(1)は1番目の2次元角度の真値の方位角成分を表している。
同様に、E(K)はK番目の2次元角度の真値の仰角成分を表し、Az(K)はK番目の2次元角度の真値の方位角成分を表している。
【0030】
また、式(8)のPqのi行j列成分Pq(i,j)は、下記の式(11)により算出することができる。
【数4】
式(11)において、σE(k)はk番目の仰角観測誤差、σAz(k)はk番目の方位角観測誤差を表している。
【0031】
また、式(9)におけるaのi番目の成分a(i)は、下記の式(12)により算出することができる。
【数5】
【0032】
発射諸元推定処理部4は、上記のように、式(4)〜式(12)を用いて、発射諸元パラメータの増分Δqを最小2乗法によって算出すると、発射諸元パラメータの増分Δqを式(3)に代入して、新たな発射諸元パラメータqnを算出し、新たな発射諸元パラメータqnを同一軌道判定処理部3に送信する。
【0033】
次に、発射諸元推定処理部4は、同一軌道判定処理部3が許容範囲内であると認定して、同一軌道判定処理部3から発射諸元パラメータの確定信号と、統計量Sの算出に使用した2次元角度の予測値及び観測値とを受けると、式(8)を使用して、前回送信済みの発射諸元パラメータ(同一軌道判定処理部3で最後に使用された発射諸元パラメータ)の誤差共分散行列Pqを算出し、その発射諸元パラメータの誤差共分散行列Pqを3D予測位置誤差共分散行列算出処理部6に出力する。発射諸元パラメータの誤差共分散行列Pqには、時刻情報が付加されている。
また、発射諸元推定処理部4は、前回送信済みの発射諸元パラメータ(同一軌道判定処理部3で最後に使用された発射諸元パラメータ)と、軌道テンプレートと、2Dセンサ基準の極座標における2次元角度の予測値とを3D予測位置算出処理部5に出力する。
【0034】
3D予測位置算出処理部5は、発射諸元推定処理部4から前回送信済みの発射諸元パラメータと軌道テンプレートと2次元角度の予測値とを受けると、同一軌道判定処理部3と同様に、その発射諸元パラメータと軌道テンプレートを用いて、目標の3次元予測軌道(各時刻における目標の3次元予測位置を示す点の集合)を算出する。
3D予測位置算出処理部5は、目標の3次元予測軌道を算出すると、その3次元予測軌道を構成している各時刻における目標の3次元予測位置を2Dセンサ基準の極座標に座標変換することにより、各時刻における目標の仰角及び方位角の情報を取得する。
【0035】
3D予測位置算出処理部5は、各時刻における目標の仰角及び方位角の情報を取得すると、各時刻における目標の仰角及び方位角の中から、2次元角度の予測値に対応する目標の仰角及び方位角を検索し、その目標の仰角及び方位角の取得元の3次元予測位置を特定する。
3D予測位置算出処理部5は、上記のようにして、2次元角度の予測値と発射諸元パラメータの両方に対応する3次元予測位置を特定すると、その3次元予測位置を3Dセンサ基準の3次元予測位置z3Dに座標変換し、3Dセンサ基準の3次元予測位置z3Dを3Dセンサビームスケジューリング処理部7に出力する。このとき、3Dセンサ基準の3次元予測位置z3Dには時刻情報が付加されている。
【0036】
ここでは、3D予測位置算出処理部5が2次元角度の予測値と発射諸元パラメータの両方に対応する3次元予測位置を特定するものについて示したが、同一軌道判定処理部3又は発射諸元推定処理部4が2次元角度の予測値と発射諸元パラメータの両方に対応する3次元予測位置を特定して、3D予測位置算出処理部5が同一軌道判定処理部3又は発射諸元推定処理部4から2次元角度の予測値と発射諸元パラメータの両方に対応する3次元予測位置を収集するようにしてもよい。
【0037】
3D予測位置誤差共分散行列算出処理部6は、発射諸元推定処理部4から発射諸元パラメータの誤差共分散行列Pqを受けると、発射諸元パラメータの誤差共分散行列Pqから目標の発射位置zl(発射点の緯度、経度、高度)の誤差共分散行列Plを抽出する。
3D予測位置誤差共分散行列算出処理部6は、目標の発射位置zlの誤差共分散行列Plを抽出すると、その発射位置zlの誤差共分散行列Plを目標の3次元予測軌道に沿って3次元予測位置z3Dの時刻まで外挿する。
ただし、3次元予測軌道は、3D予測位置算出処理部5と同様にして、発射諸元パラメータと軌道テンプレートから算出するようにしてもよいし、同一軌道判定処理部3又は発射諸元推定処理部4から収集するようにしてもよい。
【0038】
3D予測位置誤差共分散行列算出処理部6は、発射位置zlの誤差共分散行列Plを目標の3次元予測軌道に沿って3次元予測位置z3Dの時刻まで外挿すると、外挿後の発射位置zlの誤差共分散行列Plを3Dセンサ基準の座標系に座標変換して、3Dセンサ基準の3次元予測位置誤差共分散行列P3Dを算出し、その3次元予測位置誤差共分散行列P3Dを3Dセンサビームスケジューリング処理部7に出力する。このとき、3Dセンサ基準の3次元予測位置誤差共分散行列P3Dには時刻情報が付加されている。
なお、3Dセンサ基準の3次元予測位置誤差共分散行列P3Dは、3Dセンサ8のビーム指向範囲に相当する。
【0039】
3Dセンサビームスケジューリング処理部7は、3D予測位置算出処理部5から3Dセンサ基準の3次元予測位置z3Dを受け、3D予測位置誤差共分散行列算出処理部6から3Dセンサ基準の3次元予測位置誤差共分散行列P3Dを受けると、その3次元予測位置z3Dと3次元予測位置誤差共分散行列P3Dを用いて、3Dセンサ8のビームスケジュールを作成する。
即ち、3Dセンサビームスケジューリング処理部7は、3Dセンサ8から照射されるビームの中心を3次元予測位置z3Dに設定して、3Dセンサ8のビーム指向範囲を3次元予測位置誤差共分散行列P3Dに設定し、3Dセンサ8がビーム指向範囲内を指向するようにビームスケジュールを作成する。
【0040】
図6は3Dセンサ基準の3次元予測位置z3Dと、3Dセンサ基準の3次元予測位置誤差共分散行列P3Dと、ビームスケジュールとの関係を示す説明図である。
図6では、発射位置zlの誤差共分散行列Plを目標の3次元予測軌道に沿って所望の時刻まで外挿することにより、3Dセンサ基準の3次元予測位置z3Dと、3Dセンサ基準の3次元予測位置誤差共分散行列P3Dを求める様子を表している。
図6に示すように、3次元予測位置z3Dが3Dセンサ8のビーム指向方向に相当し、3次元予測位置誤差共分散行列P3Dがビーム指向範囲に相当することから、3Dセンサ8が3次元予測位置z3Dを中心とする3次元予測位置誤差共分散行列P3Dの領域内にビームを撃つようにスケジュールが作成される。
【0041】
3Dセンサ8は、3Dセンサビームスケジューリング処理部7により作成されたビームスケジュールにしたがってビームを照射して、目標の3次元角度(距離、仰角、方位角)を測位する。
【0042】
以上で明らかなように、この実施の形態1によれば、軌道データベース2に記憶されている軌道テンプレートと目標の発射諸元パラメータを用いて目標の2次元角度を予測し、その2次元角度の予測値と2次元センサ1により測位された2次元角度の観測値との差異が許容範囲内にあるか否かを判定する予測判定処理を実施する同一軌道判定処理部3と、同一軌道判定処理部3の判定結果が許容範囲外である旨を示す場合、その発射諸元パラメータを更新し、更新後の発射諸元パラメータを同一軌道判定処理部3に出力して、再度の予測判定処理を実施させる一方、同一軌道判定処理部3の判定結果が許容範囲内である旨を示す場合、その発射諸元パラメータを用いて目標の3次元位置を予測する予測手段(発射諸元推定処理部4、3D予測位置算出処理部5)とを設け、3Dセンサビームスケジューリング処理部7が3次元センサ8のビーム指向方向を3D予測位置算出処理部5により予測された3次元位置に合わせるように構成したので、3次元センサ8のビーム指向方向を適正に制御して、3次元センサ8の3次元角度の測位精度を高めることができる効果を奏する。
【0043】
また、この実施の形態1によれば、同一軌道判定処理部3の判定結果が許容範囲内である旨を示す場合、3D予測位置誤差共分散行列算出処理部6が発射諸元パラメータの誤差共分散行列Pqから3次元センサ8のビーム指向範囲を演算し、3Dセンサビームスケジューリング処理部7が3次元センサ8のビーム指向範囲を3D予測位置誤差共分散行列算出処理部6により演算されたビーム指向範囲に合わせるように構成したので、3次元センサ8が必要な範囲にビームを照射することができる効果を奏する。
【0044】
実施の形態2.
図7はこの発明の実施の形態2によるセンサ制御装置を示す構成図であり、図において、図1と同一符号は同一または相当部分を示すので説明を省略する。
ビーム指向範囲制御処理部9は3Dセンサビームスケジューリング処理部7から3D予測位置誤差共分散行列算出処理部6により算出された3Dセンサ基準の3次元予測位置誤差共分散行列P3Dに基づいて矩形範囲を設定し、その矩形範囲内の複数個所に3次元センサ8のビーム指向方向が合うように、ビームスケジュールの作成を3Dセンサビームスケジューリング処理部7に指示する。なお、ビーム指向範囲制御処理部9はセンサ制御手段を構成している。
【0045】
上記実施の形態1では、3Dセンサビームスケジューリング処理部7が、3Dセンサ8が3次元予測位置z3Dを中心とする3次元予測位置誤差共分散行列P3Dの領域内にビームを撃つようにスケジュールを作成するものについて示したが、この実施の形態2では、3Dセンサ8が実際に照射するビームの位置を具体的に決定するものについて説明する。
【0046】
ビーム指向範囲制御処理部9は、3Dセンサビームスケジューリング処理部7から3D予測位置誤差共分散行列算出処理部6により算出された3Dセンサ基準の3次元予測位置誤差共分散行列P3Dを入力する。
ビーム指向範囲制御処理部9は、3Dセンサ基準の3次元予測位置誤差共分散行列P3Dを入力すると、その3次元予測位置誤差共分散行列P3Dの座標系を、3Dセンサ基準の直交座標から3Dセンサ基準の極座標に変換する。
【0047】
ビーム指向範囲制御処理部9は、上記のようにして座標変換を実施すると、3Dセンサ基準の極座標の3D予測位置誤差共分散行列P3D_POLについて、代数学における対角化処理を行うことにより、極座標の3D予測位置誤差共分散行列P3D_POLにおける固有ベクトルと固有値を算出する。
ビーム指向範囲制御処理部9は、極座標の3D予測位置誤差共分散行列P3D_POLにおける固有ベクトルと固有値を算出すると、その固有値の大きさを基準にして、3Dセンサ基準の極座標の3D予測位置誤差共分散行列P3D_POLを覆う矩形範囲を設定する。
【0048】
ここで、図8は3Dセンサ基準の極座標の3D予測位置誤差共分散行列P3D_POLを仰角、方位角から見ている説明図である。
図8において、z3D_POLは3Dセンサ基準の極座標の3次元予測位置、P3D_POLは3Dセンサ基準の極座標の3次元予測位置誤差共分散行列である。
また、λ1,λ2は3Dセンサ基準の極座標の3D予測位置誤差共分散行列P3D_POLの固有値、u1,u2は3Dセンサ基準の極座標の3D予測位置誤差共分散行列P3D_POLの固有ベクトルである。
3D予測位置誤差共分散行列P3D_POLの固有値λ1,λ2は矩形の辺の半長径あるいは半短径に相当し、固有ベクトルu1,u2は長方形の仰角軸および方位角軸に対する傾きに相当する。
なお、3Dセンサ基準の極座標の3D予測位置誤差共分散行列P3D_POLを覆う矩形範囲は、点A1,A2,A3,A4を結ぶ範囲である。
【0049】
ビーム指向範囲制御処理部9は、3Dセンサ基準の極座標の3D予測位置誤差共分散行列P3D_POLを覆う矩形範囲を設定すると、図9に示すように、その矩形範囲に対して、事前に指定された間隔で、仰角方向と方位角方向にメッシュを切り、そのメッシュ同士の交点と、そのメッシュと長方形の各辺との交点を求める(図9の●を参照)。
ビーム指向範囲制御処理部9は、上記のようにして、交点を求めると、その矩形範囲内にある複数の交点にビームが照射されるように、ビームスケジュールの作成を3Dセンサビームスケジューリング処理部7に指示する。
これにより、3Dセンサビームスケジューリング処理部7は、例えば、矩形範囲内の交点を順番又は同時にビームを照射するようなビームスケジュールを作成する。
【0050】
以上で明らかなように、この実施の形態2によれば、3D予測位置誤差共分散行列算出処理部6により算出された3Dセンサ基準の3次元予測位置誤差共分散行列P3Dに基づいて矩形範囲を設定し、その矩形範囲内の複数個所に3次元センサ8のビーム指向方向を合わせるように構成したので、必要なビーム指向範囲を網羅しつつ、ビームの効率的なリソースマネージメントを行うことができる効果を奏する。
【0051】
実施の形態3.
図10はこの発明の実施の形態3によるセンサ制御装置を示す構成図であり、図において、図1と同一符号は同一または相当部分を示すので説明を省略する。
処理停止制御部10は3D予測位置算出処理部5により算出された3Dセンサ基準の3次元予測位置z3Dを参照して3Dセンサ8と目標間の距離を求め、3Dセンサ8と目標間の距離が予め設定された距離範囲を逸脱している場合、3D予測位置誤差共分散行列算出処理部6における誤差共分散行列の算出処理と、3Dセンサビームスケジューリング処理部7におけるビームスケジュールの作成処理を停止させる処理を実施する。なお、処理停止制御部10は処理停止手段を構成している。
【0052】
上記実施の形態1,2では、3Dセンサ8と目標間の距離が長い場合でも、3Dセンサ8がビームを目標に照射するものについて示したが、3Dセンサ8と目標間の距離が長くなると、3Dセンサ8のビームが目標まで届かなくなることがある。この場合には、目標の3次元角度を測位することができないため、3Dセンサ8が無駄なビームを照射していることになる。
そこで、この実施の形態3では、3Dセンサ8と目標間の距離が予め設定された距離範囲を逸脱すると、3Dセンサ8が無駄なビームの照射を行わないようにしている。
【0053】
具体的には、以下の通りである。
処理停止制御部10は、3D予測位置算出処理部5が3Dセンサ基準の3次元予測位置z3Dを算出すると、その3次元予測位置z3Dを参照して、3Dセンサ8と目標間の距離を求める。
処理停止制御部10は、3Dセンサ8と目標間の距離と予め設定された距離範囲を比較し、3Dセンサ8と目標間の距離が予め設定された距離範囲を逸脱していれば、3D予測位置誤差共分散行列算出処理部6における誤差共分散行列の算出処理を停止させるとともに、3Dセンサビームスケジューリング処理部7におけるビームスケジュールの作成処理を停止させる。
【0054】
以上で明らかなように、この実施の形態3によれば、3D予測位置算出処理部5により算出された3Dセンサ基準の3次元予測位置z3Dを参照して3Dセンサ8と目標間の距離を求め、3Dセンサ8と目標間の距離が予め設定された距離範囲を逸脱している場合、3D予測位置誤差共分散行列算出処理部6における誤差共分散行列の算出処理と、3Dセンサビームスケジューリング処理部7におけるビームスケジュールの作成処理を停止させるように構成したので、無駄な処理を省略することができるようになり、システム全体の処理負荷を軽減することができる効果を奏する。
【0055】
実施の形態4.
図11はこの発明の実施の形態4によるセンサ制御装置を示す構成図であり、図において、図1と同一符号は同一または相当部分を示すので説明を省略する。
ビームスケジュールデータベース11は事前に設定された3Dセンサ8のビーム指向方向とビーム指向範囲を実現するビームスケジュールを記憶しているメモリである。なお、3Dセンサ8のビーム指向方向とビーム指向範囲は、事前に2Dセンサ1のプラットホームの位置を変えて、3Dセンサ8のビームをどの方向に何本撃つかを計算して決められている。
システム計算時間測定処理部12はセンサ制御装置の各処理部の処理時間(例えば、3Dセンサビームスケジューリング処理部7におけるビームスケジュールの作成処理時間、3D予測位置算出処理部5における3次元予測位置の算出処理時間、3D予測位置誤差共分散行列算出処理部6における誤差共分散行列の算出処理時間)をそれぞれ測定する。
【0056】
ビームスケジュール出力処理部13はシステム計算時間測定処理部12により測定された何れの処理時間も予め設定された制限時間を越えていなければ、3Dセンサビームスケジューリング処理部7により作成されたビームスケジュールにしたがって3Dセンサ8のビームを制御し、システム計算時間測定処理部12により測定された何れかの処理時間が予め設定された制限時間を越えると、ビームスケジュールデータベース11に記憶されているビームスケジュールにしたがって3Dセンサ8のビームを制御する。
なお、3Dセンサビームスケジューリング処理部7、ビームスケジュールデータベース11、システム計算時間測定処理部12及びビームスケジュール出力処理部13からセンサ制御手段が構成されている。
【0057】
上記実施の形態1〜3では、3Dセンサビームスケジューリング処理部7により作成されたビームスケジュールにしたがって3Dセンサ8のビームを制御するものについて示したが、3Dセンサビームスケジューリング処理部7により作成されたビームスケジュール、または、事前に設定されたビームスケジュールにしたがって3Dセンサ8のビームを制御するようにしてもよい。
【0058】
具体的には、以下の通りである。
システム計算時間測定処理部12は、センサ制御装置の各処理部の処理時間をそれぞれ測定する。
例えば、3Dセンサビームスケジューリング処理部7におけるビームスケジュールの作成処理時間、3D予測位置算出処理部5における3次元予測位置の算出処理時間、3D予測位置誤差共分散行列算出処理部6における誤差共分散行列の算出処理時間をそれぞれ測定する。
【0059】
ビームスケジュール出力処理部13は、システム計算時間測定処理部12により測定された何れの処理時間も予め設定された制限時間を越えていなければ、上記実施の形態1〜3と同様に、3Dセンサビームスケジューリング処理部7により作成されたビームスケジュールにしたがって3Dセンサ8のビームを制御する。
しかし、システム計算時間測定処理部12により測定された何れかの処理時間が予め設定された制限時間を越えている場合、3Dセンサビームスケジューリング処理部7により作成されたビームスケジュールでは、想定通りのビーム制御を実施することができず、3Dセンサ8における測位精度が劣化することが予想される。
そこで、ビームスケジュール出力処理部13は、システム計算時間測定処理部12により測定された何れかの処理時間が予め設定された制限時間を越えた場合には、ビームスケジュールデータベース11に記憶されているビームスケジュールにしたがって3Dセンサ8のビームを制御するようにする。
【0060】
以上で明らかなように、この実施の形態4によれば、システム計算時間測定処理部12により測定された何れの処理時間も予め設定された制限時間を越えていなければ、3Dセンサビームスケジューリング処理部7により作成されたビームスケジュールにしたがって3Dセンサ8のビームを制御し、システム計算時間測定処理部12により測定された何れかの処理時間が予め設定された制限時間を越えると、ビームスケジュールデータベース11に記憶されているビームスケジュールにしたがって3Dセンサ8のビームを制御するように構成したので、何らかの原因で何れかの処理時間が予め設定された制限時間を越える状況が発生しても、3Dセンサ8の高い測位精度を維持することができる効果を奏する。
【0061】
実施の形態5.
図12はこの発明の実施の形態5によるセンサ制御装置を示す構成図であり、図において、図1と同一符号は同一または相当部分を示すので説明を省略する。
軌道データベース14は複数の目標軌道(例えば、目標の発射時刻、緯度、経度、高度など)を複数保管しているメモリである。なお、軌道データベース14は保管手段を構成している。
予測処理部15は軌道データベース14に保管されている複数の目標軌道の中から、2Dセンサ1により測位された2次元角度の観測値と最も適合する目標軌道を選択して、その目標軌道から目標の3次元位置を予測し、その3次元位置を中心とする所定の範囲の領域内にビームを撃つようにスケジュールを作成する。なお、予測処理部15は第2予測手段を構成している。
【0062】
3Dセンサビーム制御方法選択処理部16はオペレータの設定内容にしたがって3Dセンサビームスケジューリング処理部7により作成されたビームスケジュール又は予測処理部15により作成されたビームスケジュールを選択し、選択したビームスケジュールにしたがって3Dセンサ8のビームを制御する。なお、3Dセンサビーム制御方法選択処理部16は選択受付手段を構成している。
【0063】
次に動作について説明する。
予測処理部15は、2Dセンサ1により測位された2次元角度の観測値を入力すると、軌道データベース14から複数の目標軌道を収集する。
予測処理部15は、軌道データベース14から複数の目標軌道を収集すると、複数の目標軌道の座標変換を実施することにより、複数の目標軌道をそれぞれ2Dセンサ基準の2次元角度の予測値に変換する。
【0064】
予測処理部15は、上記のようにして、複数の2次元角度の予測値を求めると、適合度検定に関する式(1)を演算することにより、複数の2次元角度の予測値と2Dセンサ1により測位された2次元角度の観測値との同一性を表す統計量Sを求める。この場合、統計量Sは、複数の目標軌道の個数分だけ求める。
予測処理部15は、複数の統計量Sを求めると、最も小さい統計量Sを選択し、その統計量Sに対応する目標軌道(当該統計量Sの演算に用いている2次元角度の予測値に対応する目標軌道)から、2Dセンサ1により測位された2次元角度の観測値の時刻に対応する目標の3次元予測位置を算出する。
【0065】
予測処理部15は、2次元角度の観測値の時刻に対応する目標の3次元予測位置を算出すると、その3次元予測位置を3Dセンサ基準の座標に変換することにより、3Dセンサ基準の3次元予測位置を算出する。なお、目標の発射位置は、最も小さい統計量Sに対応する目標軌道から一意に決まる。
予測処理部15は、3Dセンサ基準の3次元予測位置を算出すると、3Dセンサ8がその3次元予測位置を中心とする所定の範囲(事前に設定された3Dセンサ8のビーム指向範囲)の領域内にビームを撃つようなスケジュールを作成する。
【0066】
3Dセンサビーム制御方法選択処理部16は、事前に、3Dセンサビームスケジューリング処理部7により作成されたビームスケジュールを用いて、3Dセンサ8のビームを制御するのか、予測処理部15により作成されたビームスケジュールを用いて、3Dセンサ8のビームを制御するのかの設定を受け付ける。
3Dセンサビーム制御方法選択処理部16は、オペレータが上記の設定を行うと、オペレータの設定内容にしたがって3Dセンサビームスケジューリング処理部7により作成されたビームスケジュール、または、予測処理部15により作成されたビームスケジュールを選択し、選択したビームスケジュールにしたがって3Dセンサ8のビームを制御する。
【0067】
以上で明らかなように、この実施の形態5によれば、オペレータの設定内容にしたがって3Dセンサビームスケジューリング処理部7により作成されたビームスケジュール、または、予測処理部15により作成されたビームスケジュールを選択し、選択したビームスケジュールにしたがって3Dセンサ8のビームを制御するように構成したので、例えば、3D予測位置算出処理部5や3D予測位置誤差共分散行列算出処理部6の算出処理に多くの時間を要することが予想されるような状況では、オペレータの判断で、予測処理部15により作成されたビームスケジュールにしたがって3Dセンサ8のビームを制御することができるようになり、その結果、システムの抗堪性を高めることができる効果を奏する。
【0068】
実施の形態6.
図13はこの発明の実施の形態6によるセンサ制御装置を示す構成図であり、図において、図1と同一符号は同一または相当部分を示すので説明を省略する。
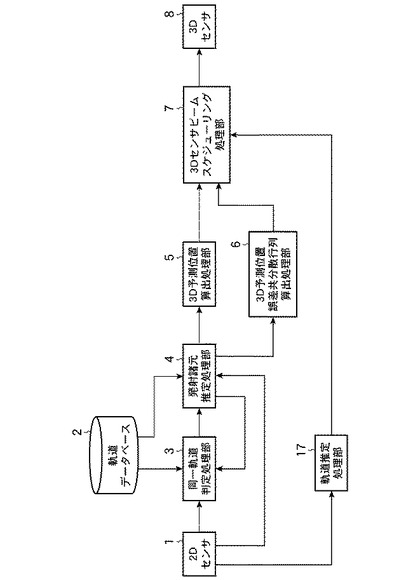
軌道推定処理部17は2Dセンサ1により測位された2次元角度の観測値からコーストモデルに基づいて目標の3次元予測位置を算出する。なお、軌道推定処理部17は第3予測手段を構成している。
【0069】
次に動作について説明する。
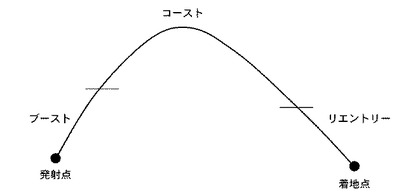
図14は軌道推定処理部17におけるコーストモデルに基づく3次元予測位置の推定処理を説明するためのイメージ図である。
図14では、発射点から着地点に移動するロケットのような目標を想定すると、目標の運動をブースト、コースト、リエントリーの3状態に分けられることを示している。
目標には推力、空気抵抗力、重力などの外力が作用し、ブースト時には、外力の中で推力が支配的となり、リエントリー時には、外力の中で空気抵抗力が支配的となる。
また、コースト時には、既にロケットの推進力を使い切って推力が働かなくなり、高度が高くて空気抵抗力の影響が少ないことから、主に外力として、重力が支配的となる。
【0070】
ここで、推力や空気抵抗力は、目標によって値が大きく異なるが、重力は、どの目標でもほとんど同じであるため、コースト時の目標運動は、下記の式(13)の運動方程式で表される。
【数6】
式(13)において、rTは図5における目標Tの地心座標における位置ベクトルを表し、μは重力定数である。
また、rTの符号の上の“・・”は、rTの2回微分を表している。
【0071】
2Dセンサ1の位置をrSとすると、2Dセンサ1の位置rSは、下記の式(14)で表される。ただし、2Dセンサ1の位置rSは既知であるものとする。
【数7】
【0072】
また、2Dセンサ1に対する目標位置をrとすると、rとrSとrTの間には、下記の式(15)の関係式が成立する。
rT=rS+r (15)
また、2Dセンサ1に対する目標位置rは、2Dセンサ1と目標間の距離、仰角及び方位角から求まる方向余弦を用いると、下記の式(16)で表される。
r=ρL (16)
【0073】
式(16)におけるρは、下記の式(17)で表され、式(16)におけるLは、下記の式(18)で表される。
ρ=|r| (17)
【数8】
【0074】
式(13)〜式(18)において、rT,rが未知、rS,Lが既知であることから、式(13)〜式(18)を用いて、rTを消去すると、rとrSとLの関係式が導出され、この関係式を解くと、rが求まる。
即ち、2Dセンサに対する目標位置rは、2Dセンサ1により測位された仰角及び方位角の観測値から求まる方向余弦Lと、既知である2Dセンサ1の位置rSとを用いて算出される。
【0075】
また、2Dセンサ1に対する目標位置rの算出後、2Dセンサ1に対する目標位置rと、既知である2Dセンサ1の位置rSから、式(15)の関係式を用いて、地心座標における目標位置rTである3次元予測位置を算出する。
この3D予測位置を3Dセンサ基準の座標系に座標変換することにより、3Dセンサ基準の3D予測位置が求まる。
【0076】
軌道推定処理部17は、最終的に、2Dセンサ1から出力されるブースト終了判定を元に、2Dセンサ1により測位された仰角及び方位角の観測値から求まる方向余弦Lと、既知である2Dセンサ1の位置rSとから、地心座標における目標位置rTを求め、その地心座標における目標位置rTを3Dセンサ基準の座標系に座標変換することにより、3Dセンサ基準の3次元予測位置を求める。
【0077】
3Dセンサビームスケジューリング処理部7は、軌道推定処理部17が3Dセンサ基準の3次元予測位置を求めると、その3次元予測位置又は3D予測位置算出処理部5により算出された3次元予測位置のいずれかを選択し、3Dセンサ8がその3次元予測位置を中心とする3次元予測位置誤差共分散行列P3Dの領域内にビームを撃つようなスケジュールを作成する。
【0078】
以上で明らかなように、この実施の形態6によれば、軌道推定処理部17が2Dセンサ1により測位された2次元角度の観測値からコーストモデルに基づいて目標の3次元予測位置を算出し、3Dセンサビームスケジューリング処理部7が軌道推定処理部17により算出された3次元予測位置又は3D予測位置算出処理部5により算出された3次元予測位置のいずれかを選択してスケジュールを作成するように構成したので、例えば、3D予測位置算出処理部5の算出処理に多くの時間を要することが予想されるような状況では、軌道推定処理部17により算出された3次元予測位置にしたがってビームスケジュールを作成することができるようになり、その結果、システムの抗堪性を高めることができる効果を奏する。
【図面の簡単な説明】
【0079】
【図1】この発明の実施の形態1によるセンサ制御装置を示す構成図である。
【図2】2Dセンサ1により測位された目標の2次元角度の観測値を示す概念図である。
【図3】2Dセンサ1により測位された観測値Bに関連する2D角度観測誤差共分散行列を示す概念図である。
【図4】軌道データベース2に記憶されている軌道テンプレートを示すイメージ図である。
【図5】発射諸元パラメータにおける右昇天角、赤緯及び目標の速度ベクトルを示す説明図である。
【図6】3Dセンサ基準の3次元予測位置z3Dと、3Dセンサ基準の3次元予測位置誤差共分散行列P3Dと、ビームスケジュールとの関係を示す説明図である。
【図7】この発明の実施の形態2によるセンサ制御装置を示す構成図である。
【図8】3Dセンサ基準の極座標の3D予測位置誤差共分散行列P3D_POLを仰角、方位角から見ている説明図である。
【図9】3Dセンサ8のビーム指向方向を示す説明図である。
【図10】この発明の実施の形態3によるセンサ制御装置を示す構成図である。
【図11】この発明の実施の形態4によるセンサ制御装置を示す構成図である。
【図12】この発明の実施の形態5によるセンサ制御装置を示す構成図である。
【図13】この発明の実施の形態6によるセンサ制御装置を示す構成図である。
【図14】軌道推定処理部17におけるコーストモデルに基づく3次元予測位置の推定処理を説明するためのイメージ図である。
【符号の説明】
【0080】
1 2Dセンサ(2次元センサ)、2 軌道データベース(記憶手段)、3 同一軌道判定処理部(判定手段)、4 発射諸元推定処理部(予測手段)、5 3D予測位置算出処理部(予測手段)、6 3D予測位置誤差共分散行列算出処理部(予測手段)、7 3Dセンサビームスケジューリング処理部(センサ制御手段)、8 3Dセンサ(3次元センサ)、9 ビーム指向範囲制御処理部(センサ制御手段)、10 処理停止制御部(処理停止手段)、11 ビームスケジュールデータベース(センサ制御手段)、12 システム計算時間測定処理部(センサ制御手段)、13 ビームスケジュール出力処理部(センサ制御手段)、14 軌道データベース(保管手段)、15 予測処理部(第2予測手段)、16 3Dセンサビーム制御方法選択処理部(選択受付手段)、17 軌道推定処理部(第3予測手段)。
【特許請求の範囲】
【請求項1】
ビームを目標に照射して、上記目標の2次元角度を測位する2次元センサと、上記目標の軌道を示す軌道テンプレートを記憶している記憶手段と、上記記憶手段に記憶されている軌道テンプレートと上記目標の発射諸元情報を用いて上記目標の2次元角度を予測し、上記2次元角度の予測値と上記2次元センサにより測位された2次元角度の観測値との差異が許容範囲内にあるか否かを判定する予測判定処理を実施する判定手段と、上記判定手段の判定結果が許容範囲外である旨を示す場合、上記発射諸元情報を更新し、更新後の発射諸元情報を上記判定手段に出力して、再度の予測判定処理を実施させる一方、上記判定手段の判定結果が許容範囲内である旨を示す場合、上記発射諸元情報を用いて上記目標の3次元位置を予測する予測手段と、ビームを上記目標に照射して、上記目標の3次元角度を測位する3次元センサのビーム指向方向を上記予測手段により予測された3次元位置に合わせるセンサ制御手段とを備えたセンサ制御装置。
【請求項2】
予測手段は、判定手段の判定結果が許容範囲内である旨を示す場合、目標の発射諸元情報を用いて3次元センサのビーム指向範囲を演算し、センサ制御手段は、上記3次元センサのビーム指向範囲を上記予測手段により演算されたビーム指向範囲に合わせることを特徴とする請求項1記載のセンサ制御装置。
【請求項3】
センサ制御手段は、3次元センサのビーム指向方向を予測手段により演算されたビーム指向範囲内の複数個所に合わせることを特徴とする請求項2記載のセンサ制御装置。
【請求項4】
予測手段により予測された3次元位置から3次元センサと目標間の距離を求め、上記3次元センサと目標間の距離が予め設定された距離範囲を逸脱している場合、予測手段及びセンサ制御手段の処理を停止させる処理停止手段を設けたことを特徴とする請求項1から請求項3のうちのいずれか1項記載のセンサ制御装置。
【請求項5】
センサ制御手段は、判定手段及び予測手段の処理時間をそれぞれ測定し、いずれかの処理時間が予め設定された制限時間を越えると、3次元センサのビーム指向方向を事前に設定された3次元位置に合わせるとともに、上記3次元センサのビーム指向範囲を事前に設定されたビーム指向範囲に合わせることを特徴とする請求項2記載のセンサ制御装置。
【請求項6】
複数の目標軌道を保管している保管手段と、上記保管手段に保管されている複数の目標軌道の中から、2次元センサにより測位された2次元角度の観測値と最も適合する目標軌道を選択し、上記目標軌道から目標の3次元位置を予測する第2予測手段と、予測手段により予測された3次元位置又は上記第2予測手段より予測された3次元位置のいずれかの選択を受け付けて、3次元センサのビーム指向方向を選択した3次元位置に合わせる選択受付手段とを設けたことを特徴とする請求項1から請求項3のうちのいずれか1項記載のセンサ制御装置。
【請求項7】
2次元センサにより測位された2次元角度の観測値からコーストモデルに基づいて目標の3次元位置を予測する第3予測手段を設け、センサ制御手段が3次元センサのビーム指向方向を予測手段により予測された3次元位置又は上記第3予測手段により予測された3次元位置に合わせることを特徴とする請求項1から請求項3のうちのいずれか1項記載のセンサ制御装置。
【請求項1】
ビームを目標に照射して、上記目標の2次元角度を測位する2次元センサと、上記目標の軌道を示す軌道テンプレートを記憶している記憶手段と、上記記憶手段に記憶されている軌道テンプレートと上記目標の発射諸元情報を用いて上記目標の2次元角度を予測し、上記2次元角度の予測値と上記2次元センサにより測位された2次元角度の観測値との差異が許容範囲内にあるか否かを判定する予測判定処理を実施する判定手段と、上記判定手段の判定結果が許容範囲外である旨を示す場合、上記発射諸元情報を更新し、更新後の発射諸元情報を上記判定手段に出力して、再度の予測判定処理を実施させる一方、上記判定手段の判定結果が許容範囲内である旨を示す場合、上記発射諸元情報を用いて上記目標の3次元位置を予測する予測手段と、ビームを上記目標に照射して、上記目標の3次元角度を測位する3次元センサのビーム指向方向を上記予測手段により予測された3次元位置に合わせるセンサ制御手段とを備えたセンサ制御装置。
【請求項2】
予測手段は、判定手段の判定結果が許容範囲内である旨を示す場合、目標の発射諸元情報を用いて3次元センサのビーム指向範囲を演算し、センサ制御手段は、上記3次元センサのビーム指向範囲を上記予測手段により演算されたビーム指向範囲に合わせることを特徴とする請求項1記載のセンサ制御装置。
【請求項3】
センサ制御手段は、3次元センサのビーム指向方向を予測手段により演算されたビーム指向範囲内の複数個所に合わせることを特徴とする請求項2記載のセンサ制御装置。
【請求項4】
予測手段により予測された3次元位置から3次元センサと目標間の距離を求め、上記3次元センサと目標間の距離が予め設定された距離範囲を逸脱している場合、予測手段及びセンサ制御手段の処理を停止させる処理停止手段を設けたことを特徴とする請求項1から請求項3のうちのいずれか1項記載のセンサ制御装置。
【請求項5】
センサ制御手段は、判定手段及び予測手段の処理時間をそれぞれ測定し、いずれかの処理時間が予め設定された制限時間を越えると、3次元センサのビーム指向方向を事前に設定された3次元位置に合わせるとともに、上記3次元センサのビーム指向範囲を事前に設定されたビーム指向範囲に合わせることを特徴とする請求項2記載のセンサ制御装置。
【請求項6】
複数の目標軌道を保管している保管手段と、上記保管手段に保管されている複数の目標軌道の中から、2次元センサにより測位された2次元角度の観測値と最も適合する目標軌道を選択し、上記目標軌道から目標の3次元位置を予測する第2予測手段と、予測手段により予測された3次元位置又は上記第2予測手段より予測された3次元位置のいずれかの選択を受け付けて、3次元センサのビーム指向方向を選択した3次元位置に合わせる選択受付手段とを設けたことを特徴とする請求項1から請求項3のうちのいずれか1項記載のセンサ制御装置。
【請求項7】
2次元センサにより測位された2次元角度の観測値からコーストモデルに基づいて目標の3次元位置を予測する第3予測手段を設け、センサ制御手段が3次元センサのビーム指向方向を予測手段により予測された3次元位置又は上記第3予測手段により予測された3次元位置に合わせることを特徴とする請求項1から請求項3のうちのいずれか1項記載のセンサ制御装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2008−102033(P2008−102033A)
【公開日】平成20年5月1日(2008.5.1)
【国際特許分類】
【出願番号】特願2006−285265(P2006−285265)
【出願日】平成18年10月19日(2006.10.19)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成20年5月1日(2008.5.1)
【国際特許分類】
【出願日】平成18年10月19日(2006.10.19)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]