
センサ故障診断機能を有する制御装置
【課題】端子数を増加させることなく、自身の故障診断を行うことができる制御装置を提供する。
【解決手段】CPU1cにより演算されている加算値または減算値が所定範囲外の値である場合に2つのセンサ素子のいずれかが故障していることを検出するようにした制御装置において、加算値または減算値が2つのセンサ素子のいずれかの故障を示す値となるように、2つの信号線によって電送される信号のいずれかを変化させ、この2つの信号線によって電送される信号を、加算値または減算値が2つのセンサ素子の故障を示す値となるように変化させている状態で、2つのセンサ素子が正常であることが検出されている場合に、制御装置が故障していることを検出する。
【解決手段】CPU1cにより演算されている加算値または減算値が所定範囲外の値である場合に2つのセンサ素子のいずれかが故障していることを検出するようにした制御装置において、加算値または減算値が2つのセンサ素子のいずれかの故障を示す値となるように、2つの信号線によって電送される信号のいずれかを変化させ、この2つの信号線によって電送される信号を、加算値または減算値が2つのセンサ素子の故障を示す値となるように変化させている状態で、2つのセンサ素子が正常であることが検出されている場合に、制御装置が故障していることを検出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、センサ素子の故障を検出するセンサ故障診断機能を有する制御装置に関するものである。
【背景技術】
【0002】
従来、特許文献1において、複数のセンサが出力するセンサ信号を比較することによりセンサ素子の故障診断を行うブレーキ制御装置が提案されている。具体的には、特許文献1に示されるブレーキ制御装置では、同一物理量を検出する2つのセンサ素子が正常であれば2つのセンサ信号の加算値が予め決めておいた一定値となり、センサ素子が故障していると2つのセンサ信号の加算値がその一定値とならないことに基づき、センサ素子の故障診断を行っている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−167970号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記ブレーキ制御装置では、センサ素子の故障診断を行うことができるものの、ブレーキ制御装置によるセンサ素子の故障診断機能自体が故障した場合に、それを診断する機能がない。このため、センサ素子の故障診断を誤ってしまうという問題がある。このようなセンサ信号に基づいて制動制御を行うと、その制動制御を適切に行えなくなる可能性がある。
【0005】
なお、センサ素子の故障診断機能を有する制御装置において、外部端子を通じて制御装置にテスト信号を入力し、それを制御装置にて処理させたのち、もう一つの外部端子を通じて制御装置の出力として発生させるようにすることが考えられる。この場合、もう一つの外部端子を通じて発生させられた制御装置の出力が予め期待される出力であれば制御装置は正常で、期待される出力でなければ制御装置が故障していると診断できるが、テスト信号を入力するためと制御装置からの出力を発生させるための外部端子が必要になり、端子数を増加させてしまうことになる。
【0006】
本発明は上記点に鑑みて、端子数を増加させることなく、自身の故障診断を行うことができる制御装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するため、請求項1に記載の発明では、演算部(1c)により演算されている加算値または減算値が所定範囲外の値である場合に2つのセンサ素子のいずれかが故障していることを検出する第1故障検出部(145、245)を備えた制御装置において、信号変化部(13〜22)により、加算値または減算値が2つのセンサ素子のいずれかの故障を示す値となるように、2つの信号線によって電送される信号の少なくとも一方を変化させ、この2つの信号線によって電送される信号を、加算値または減算値が2つのセンサ素子の故障を示す値となるように変化させている状態で、第1故障検出部により2つのセンサ素子が正常であることが検出されている場合に、第2故障検出部(120、220)にて第1故障検出部が故障していることを検出することを特徴としている。
【0008】
このように、加算値または減算値が2つのセンサ素子の故障を示す値となるように変化させている状態で、第1故障検出部により2つのセンサ素子が正常であることが検出されたときに、第1故障検出部の故障と診断できる。これにより、センサ素子の故障診断に加えて、制御装置自身の故障診断を行うことが可能となる。そして、制御装置に対して、テスト信号の入力のための端子やその結果を出力するための端子を備えなくても、制御装置自身の故障診断が行える。このため、端子数を増加させることなく、自身の故障診断を行うことが可能となる。
【0009】
請求項2に記載の発明では、2つのセンサ素子にて同一物理量に対して反転信号をセンサ信号として出力させ、信号変化部を2つのセンサ素子に対応する2つの信号線の双方に設け、2つのセンサ素子の出力するセンサ信号に対して同一のテスト信号を重畳して2つの信号線によって電送される2つの信号を変化させている。このような構成において、演算手段にて、2つの信号線によって電送される信号の信号値を加算して加算値を演算し、第1故障検出部にて、演算部により演算されている加算値が所定範囲外の値である場合に2つのセンサ素子のいずれかが故障していることを検出し、センサ値生成手段(130、155)にて、2つの信号線によって電送される信号の信号値を減算して物理量に相関する値を生成している。
【0010】
このように、2つの信号線によって電送される2つの信号を信号変化部によって変化させ、それぞれにテスト信号を重畳している。このようにすれば、演算部により演算されている加算値の振幅がテスト信号成分の二倍振幅となるようにできる。このため、テスト信号の振幅を小さくしても、テスト信号に基づいて制御装置自身の故障診断を行うことができる。したがって、テスト信号の振幅を大きくした場合には、テスト信号が重畳された信号からセンサ素子の出力した信号を復元するのが難しくなるが、テスト信号の振幅を小さくすることが可能になることで、センサ信号の復元の容易化が可能となる。
【0011】
請求項3に記載の発明では、2つのセンサ素子にて同一物理量に対して同一信号をセンサ信号として出力させ、信号変化部を2つのセンサ素子に対応する2つの信号線のいずれにも設け、2つのセンサ素子の出力したセンサ信号に対して互いに反転したテスト信号を重畳して2つの信号線によって電送される2つの信号を変化させている。このような構成において、演算手段にて、2つの信号線によって電送される信号の信号値を減算して減算値を演算し、第1故障検出部にて、演算部により演算されている減算値が所定範囲外の値である場合に2つのセンサ素子のいずれかが故障していることを検出し、センサ値生成手段(230、255)にて、2つの信号線によって電送される信号の信号値を加算して物理量に相関する値を生成している。
【0012】
このように、2つのセンサ素子にて同一物理量に対して同一信号をセンサ信号として出力させ、2つのセンサ素子の出力したセンサ信号に対して互いに反転したテスト信号を重畳させる場合にも、請求項2と同様の効果を得ることができる。
【0013】
請求項4に記載の発明では、信号変化部は、2つのセンサ素子に対応する信号線のいずれか一方に設けられていることを特徴としている。
【0014】
このように、2つのセンサ素子に対応する信号線のいずれか一方にのみ信号変化部を備えるようにしても、制御装置自身の故障を検出できる。このような構成とすれば、2つのセンサ素子に対応する信号線の両方に信号変化部を備える場合と比較して、構成の簡略化を図ることが可能となる。
【0015】
なお、上記各手段の括弧内の符号は、後述する実施形態に記載の具体的手段との対応関係の一例を示すものである。
【図面の簡単な説明】
【0016】
【図1】本発明の第1実施形態にかかるブレーキECUの電気的構成を示したブロック図である。
【図2】ブレーキECU1と各種センサ2〜6との接続形態の一例を示した回路図である。
【図3】ブレーキECU1のCPU1cにて実行される故障診断処理を含む制動制御のフローチャートである。
【図4】ECU故障診断期間を含めた各出力などのタイミングチャートである。
【図5】被検出物に対して第1、第2センサ部11、12から出力されるセンサ信号の波形と各センサ信号の加算値の範囲を示したグラフである。
【図6】本発明の第2実施形態にかかるブレーキECU1と各種センサ2〜6との接続形態の一例を示した回路図である。
【図7】ブレーキECU1のCPU1cにて実行される故障診断処理を含む制動制御のフローチャートである。
【図8】ECU故障診断期間を含めた各出力などのタイミングチャートである。
【図9】本発明の第3実施形態にかかるブレーキECU1と各種センサ2〜6との接続形態の一例を示した回路図である。
【図10】テスト信号を第1、第2センサ部11、12の一方のセンサ信号にのみ重畳させる場合のタイミングチャートである。
【図11】本発明の第4実施形態にかかるブレーキECU1と各種センサ2〜6との接続形態の一例を示した回路図である。
【図12】テスト信号を第1、第2センサ部11、12の一方のセンサ信号にのみ重畳させる場合のタイミングチャートである。
【図13】本発明の第5実施形態にかかるブレーキECU1と各種センサ2〜6との接続形態の一例を示した回路図である。
【図14】ECU故障診断期間中に第2信号をGNDレベルにする場合のタイミングチャートである。
【図15】他の実施形態で説明するテスト信号を重畳したときの波形を示した図である。
【図16】他の実施形態で説明するテスト信号を重畳したときの波形を示した図である。
【発明を実施するための形態】
【0017】
以下、本発明の実施形態について図に基づいて説明する。なお、以下の各実施形態相互において、互いに同一もしくは均等である部分には、図中、同一符号を付してある。
【0018】
(第1実施形態)
本発明の第1実施形態について説明する。本実施形態では、制動の制御を行うブレーキ用電子制御装置(以下、ブレーキECUという)を例に挙げて故障診断機能を有する制御装置について説明する。本実施形態の場合、ブレーキECUと各種センサに備えられた一部によって本発明の制御装置を構成している。
【0019】
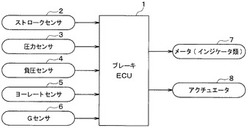
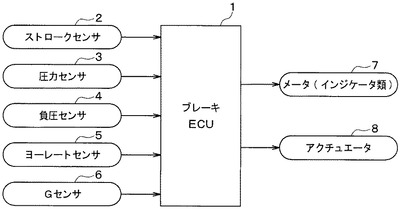
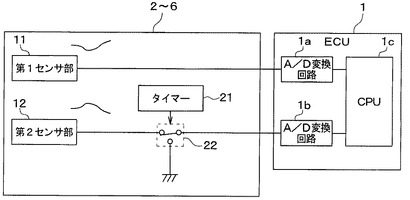
図1は、本実施形態にかかるブレーキECUの電気的構成を示したブロック図である。この図に示すように、ブレーキECU1は、図示しないブレーキシステムの各所に備えられたストロークセンサ2、圧力センサ3、負圧センサ4、ヨーレートセンサ5、加速度(G)センサ6などと信号線を介して接続されており、信号線から電送される信号を入力し、入力した信号に基づいて各種演算などを行うことで、図示しない制動装置を用いた制動制御を実行している。
【0020】
ストロークセンサ2は、図示しないブレーキペダルのストローク量などの検出に用いられ、ストロークに応じたセンサ信号を発生させている。圧力センサ3は、マスタシリンダ圧などの検出に用いられ、検出された圧力に応じたセンサ信号を発生させている。負圧センサ4は、エンジン負圧などの検出に用いられ、検出された負圧に応じたセンサ信号を発生させている。ヨーレートセンサ5は、車両に発生しているヨー値の検出に用いられ、検出されたヨー値に応じたセンサ信号を発生させている。Gセンサ6は、車両に発生している前後加速度もしくは横加速度の検出に用いられ、検出された加速度に応じたセンサ信号を発生させている。これら各種センサ2〜6のセンサ信号がそれぞれブレーキECU1に対して入力され、アンチスキッド制御や横滑り防止制御等の制動制御に用いられている。
【0021】
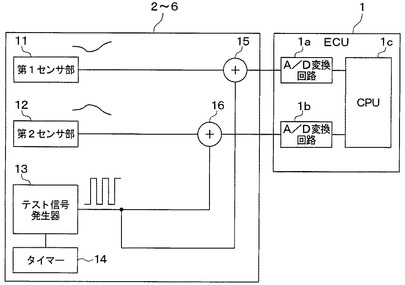
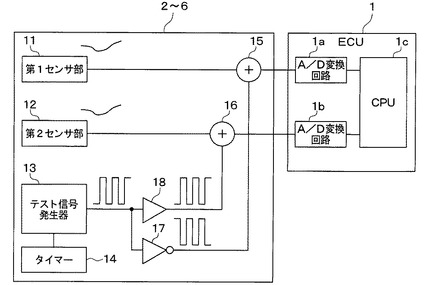
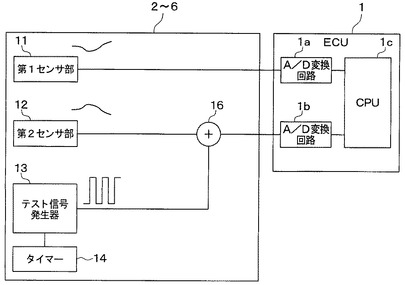
図2は、ブレーキECU1と各種センサ2〜6との接続形態の一例を示した回路図である。ここでは、各種センサ2〜6の一つとして、ストロークセンサ2がブレーキECU1に接続されている場合を例として説明するが、他のセンサ3〜6とブレーキECU1とについても同様の接続形態を適用できる。
【0022】
図2に示すように、各種センサ2〜6には、第1、第2センサ部11、12が備えられている。第1、第2センサ部11、12にはセンサ素子が備えられており、センサ素子に対応する信号線に接続され、センサ素子にて検出された各種物理量(例えばストロークセンサ2であればストローク)に応じたセンサ信号が第1、第2センサ部11、12からそれぞれ出力される。第1、第2センサ部11、12は、同一物理量に対して同一信号または反転信号となるセンサ信号を出力するが、本実施形態の場合には反転信号を出力させている。
【0023】
また、各種センサ2〜6には、テスト信号発生器13およびタイマー14が備えられていると共に、ミキシング部15、16が備えられている。テスト信号発生器13は、ブレーキECU1の故障検出用のテスト信号(擬似故障信号)を出力するものであり、本実施形態ではテスト信号として所定振幅のパルス状の出力を発生させている。タイマー14は、ブレーキECU1のセンサ故障診断機能の故障診断を行う期間(以下、ECU故障診断期間という)を計測するためのものであり、そのECU故障診断期間になるとテスト信号発生器13にテスト信号を発生させる。タイマー14は、予め決められた期間をECU故障診断期間として計測するが、本実施形態の場合は、その一例としてイグニッションスイッチがオフからオンに切替えられたときからECU故障診断期間の計測を開始するようにしている。ミキシング部15、16は、第1、第2センサ部11、12の出力したセンサ信号に対してテスト信号発生器13が出力したテスト信号を重畳させる。
【0024】
このように、各種センサ2〜6は、第1、第2センサ11、12の出力する2つのセンサ信号をブレーキECU1に伝えており、故障診断期間中には2つのセンサ信号それぞれにテスト信号発生器13が出力するテスト信号を重畳した信号をブレーキECU1に伝えている。
【0025】
ブレーキECU1は、内蔵されたA/D変換回路1a、1bを通じて中央演算回路(以下、CPUという)1cにセンサ信号もしくはセンサ信号に対してテスト信号が重畳された信号を入力し、入力した信号に基づいて故障診断や各種制動制御を実行している。故障診断としては、第1、第2センサ部11、12(具体的にはセンサ素子)の故障やブレーキECU1のセンサ故障診断機能の故障(以下、ブレーキECU1自身の故障という)の診断を行っている。
【0026】
そして、ブレーキECU1は、第1、第2センサ部11、12(具体的にはセンサ素子)の故障やブレーキECU1自身の故障診断結果に基づいて、各種故障が診断されると、メータ7に対してその旨を伝え、メータ7に備えられたインジケータを通じて各種故障を表示する。また、ブレーキECU1は、センサ信号に基づいて、制動装置に備えられるアクチュエータ8、例えば制御弁やポンプ駆動用のモータを制御することにより、アンチスキッド制御や横滑り防止制御等の制動制御を実行する。
【0027】
このような構成では、テスト信号発生器13やタイマー14およびミキシング部15、16が2つのセンサ素子に対応する2つの信号線によって電送されるセンサ信号を変化させる信号変化部を構成し、これらとブレーキECU1とによって制御装置が構成されている。
【0028】
続いて、本実施形態にかかるブレーキECU1に備えられた故障診断機能に基づく故障診断の方法について説明する。
【0029】
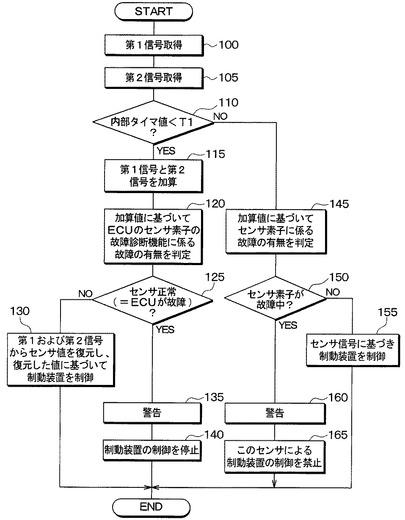
本実施形態にかかるブレーキECU1は、故障診断機能として、センサ2〜6の故障、具体的にはセンサ2〜6に備えられた第1、第2センサ部11、12のいずれかの故障を検出するセンサ故障診断機能に加えて、ブレーキECU1自身の故障を検出するECU故障診断機能を有している。これらの故障診断を行った上で各種制動制御を実行するようにしている。図3に、ブレーキECU1のCPU1cにて実行される故障診断処理を含む制動制御のフローチャートを示すと共に、図4にECU故障診断期間を含めた各出力などのタイミングチャートを示し、これらの図を参照してCPU1cで実行される処理について説明する。
【0030】
図3に示す処理は、例えばイグニッションスイッチがオフからオンに切り替わったときから開始され、所定の制御周期毎に実行される。そして、本実施形態では、イグニッションスイッチがオンされたのちのイニシャルチェック期間をECU故障診断期間としてブレーキECU1自身の故障診断を行い、その後にセンサ2〜6の故障診断を行うようにする。
【0031】
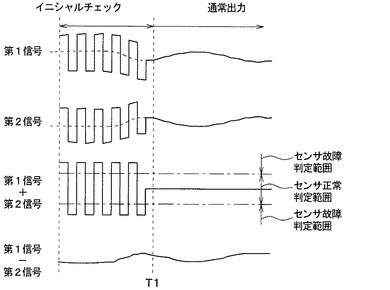
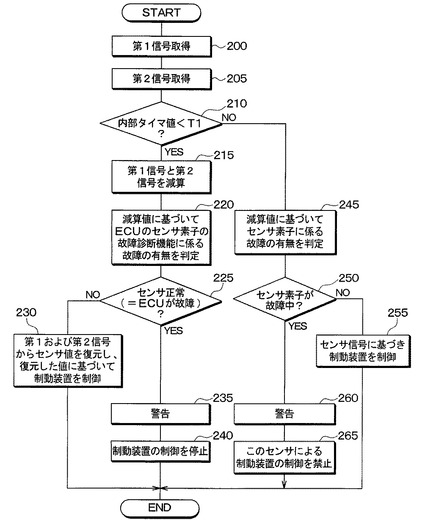
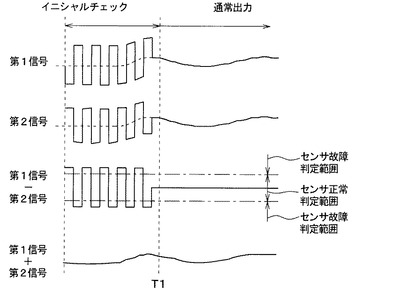
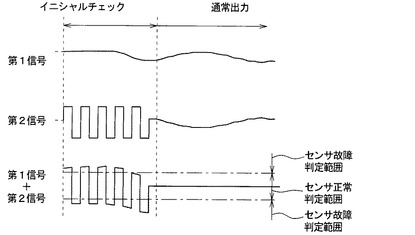
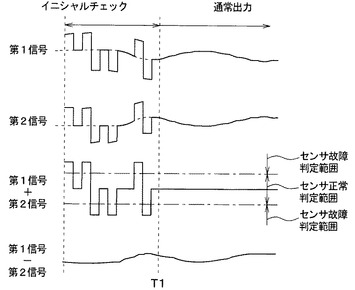
具体的には、まず、ステップ100において第1信号を取得すると共に、ステップ105において第2信号を取得する。第1、第2信号とは、A/D変換回路1a、1bを介してCPU1cに入力される信号のことである。本実施形態の場合、イグニッションスイッチがオフからオンに切り替わったと同時に、タイマー14にてECU故障診断期間を計測しており、その期間中はテスト信号発生器13より各センサ部11、12が出力するセンサ信号に対してテスト信号が重畳されることになる。本実施形態の場合、第1、第2センサ11、12の出力するセンサ信号は同一物理量に対して互いに反転信号となっている。また、テスト信号は所定振幅のパルス状となっている。このため、図4に示すように、第1、第2信号は、ECU故障診断期間中は同位相で振幅するパルス波にて構成されるテスト信号が互いに反転する反転信号とされたセンサ信号に重畳された信号となる。そして、ECU故障診断期間後には、第1、第2信号は、互いに反転する反転信号とされたセンサ信号となる。
【0032】
続く、ステップ110では、内部タイマ値が所定値T1未満であるか否かを判定する。内部タイマ値は、CPU1cの内部に備えられたタイマによって計測される値であり、所定値T1は、ECU故障診断期間に相当する値である。CPU1cは、内部タイマによってECU故障診断期間を計測しており、内部タイマ値が所定値T1未満であるか否かに基づいて、ECU故障診断期間中であるか否かを判定している。
【0033】
このステップ110で肯定判定されればECU故障診断期間中であることからステップ115に進み、第1信号と第2信号を加算することによって加算値を演算する。この加算値は、図4に示すように、第1、第2センサ部11、12の出力する互いに反転するセンサ信号が足し合わされると共に同位相で振幅するパルス波からなるテスト信号が足し合わされた値となることから、センサ信号成分については一定値となり、テスト信号成分については二倍振幅として現れる。このため、加算値は、一定値を中心として大きく振幅する波形となる。
【0034】
そして、ステップ120に進み、ステップ115で演算した加算値に基づいて、ブレーキECU1のセンサ素子の故障診断機能に係る故障の有無、つまりブレーキECU1自身の故障が発生しているか否かについて判定する。具体的には、加算値がセンサ素子の故障を示す値となるセンサ故障判定範囲に至っているか否かに基づいて、本ステップの判定を行っている。ここで、センサ故障判定範囲について、図5を参照して説明する。
【0035】
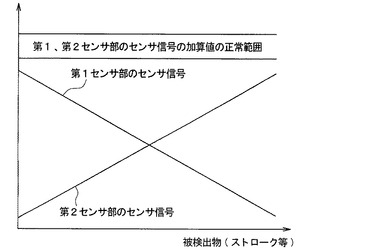
図5は、被検出物(例えばストロークセンサ2であればストローク)に対して第1、第2センサ部11、12から出力されるセンサ信号の波形と各センサ信号の加算値の範囲を示したグラフである。
【0036】
この図に示すように、第1センサ部11のセンサ信号は被検出物の値が大きくなるほど小さくなり、逆に、第2センサ部12のセンサ信号は被検出物の値が小さくなるほど大きくなる。このように、第1、第2センサ部11、12のセンサ信号は反転信号となっている。このため、これら第1、第2センサ部11、12のセンサ信号の加算値は、一定値となり図4中に示したセンサ正常判定範囲内に収まることになる。このセンサ正常判定範囲がセンサ素子が故障していないと想定される範囲であり、このセンサ正常判定範囲を超えた範囲がセンサ故障判定範囲となる。
【0037】
後述するECU故障診断期間経過後には、センサ2〜6の故障診断を行うことになり、第1、第2信号の加算値がセンサ正常判定範囲内にあるか否かを判定することになる。しかしながら、ECU故障診断期間中には、センサ素子の故障を示す値となるように第1、第2信号を変化させ、その加算値がテスト信号成分を含んだ値になることで、意図的にセンサ故障判定範囲に至るようにしてある。
【0038】
したがって、ブレーキECU1のセンサ2〜6の故障検出部が正常であれば、ECU故障診断期間中は第1、第2信号の加算値がセンサ故障判定範囲に至ることとなり、センサ正常判定範囲内であれば逆にブレーキECU1が故障していることとなる。これに基づき、ステップ120では、ECU故障判断期間中に第1、第2信号の加算値がセンサ正常判定範囲内であるかセンサ故障判定範囲に至っているかに基づいて、センサ2〜6に係る故障の有無を判定しておき、その結果をCPU1c内の図示しないメモリなどに記憶しておく。
【0039】
そしてステップ125に進み、ステップ120の結果を用いてセンサ2〜6が正常であるか否かを判定する。そして、センサ2〜6が故障していれば、ブレーキECU1のセンサ2〜6に係る故障検出部において本実施形態が対象とする故障は発生していないため、ステップ130に進んで第1、第2信号からセンサ値を復元し、復元したセンサ値に基づいて制動装置を用いた制動制御、例えばアクチュエータ8を駆動してアンチスキッド制御や横滑り防止制御等を実行する。また、センサ2〜6が正常であれば、ブレーキECU1は故障しており、ステップ135に進んでブレーキECU1が故障していることをメータ7に伝えたのち、ステップ140に進んで制動装置による制御を停止する。これにより、メータ7に備えられたインジケータなどを用いて、ブレーキECU1が故障していることが表示されると共に、制動装置による制御が停止されることで、故障したブレーキECU1の誤った処理に基づいて制動制御が実施されないようにすることが可能となる。
【0040】
一方、ステップ110で否定(通常時)判定されると、ECU故障診断期間を超えて通常期間となっていることから、ステップ145に進む。そして、第1信号と第2信号を加算することによって加算値を演算したのち、この加算値に基づいて第1、第2センサ部11、12に備えられたセンサ素子に係る故障の有無を判定する。すなわち、上記したように、加算値がセンサ正常判定範囲内であるかセンサ故障判定範囲内であるかを判定し、センサ正常判定範囲内であればセンサ素子が故障しておらず、センサ故障判定範囲内であればセンサ素子が故障していると判定し、その結果をCPU1c内の図示しないメモリなどに記憶しておく。
【0041】
その後、ステップ150に進み、ステップ145の結果を用いてセンサ素子が故障中であるか否かを判定する。ここで、センサ素子が故障中でなければステップ155に進み、センサ信号に基づいて制動装置を用いて制動制御を実行する。このとき用いられるセンサ信号としては、第1信号、第2信号、もしくは第1信号と第2信号の差(例えば第1信号−第2信号)がある。すなわち、第1信号、第2信号は、ECU故障診断期間後には単純に第1、第2センサ部11、12の出力するセンサ信号となることから、それ自体が被検出物の値に対応した値となる。また、第1信号と第2信号の差は、これらが互いに反転した反転信号であることから、図4中に示したように被検出物の値に対応した値となる。このため、第1信号、第2信号、もしくは第1信号と第2信号の差をセンサ信号として用いて、制動制御を実行することができる。このようにして、故障診断処理を含めた制動制御が実行される。
【0042】
一方、センサが故障中であればステップ160に進んでセンサが故障していることをメータ7に伝えたのち、ステップ165に進んでその故障しているセンサによる制動装置の制御を禁止する。これにより、メータ7に備えられたインジケータなどを用いて、センサ2〜6のいずれかが故障していることが表示されると共に、そのセンサによる制動装置による制御が禁止され、誤ったセンサ信号に基づいて制動制御が実行されることが防止される。例えば、ヨーレートセンサ5等のように横滑り防止制御に用いられるセンサが故障している場合には、横滑り防止制御を禁止するなどの処理を行うようにしている。
【0043】
以上説明したように、本実施形態にかかるブレーキECU1によれば、センサ素子の故障診断に加えて、ブレーキECU1自身の故障診断、具体的にはセンサ素子の故障を検出している故障診断機能の故障診断を行うことが可能となる。そして、ブレーキECU1に対して、ブレーキECU1自身の故障診断をテスト信号の入力のための端子やその結果を出力するための端子を備えなくても、ブレーキECU1自身の故障診断が行える。このため、端子数を増加させることなく、自身の故障診断を行うことが可能となる。
【0044】
また、本実施形態では、2つの信号線によって電送されるセンサ信号の両方にテスト信号を重畳させることで第1、第2信号を変化させるようにしている。このようにすれば、第1信号と第2信号の加算値の振幅がテスト信号成分の二倍振幅となるようにできる。このため、テスト信号の振幅を小さくしても、テスト信号に基づいてブレーキECU1自身の故障診断を行うことができる。したがって、テスト信号の振幅を大きくした場合には、第1、第2信号からセンサ信号を復元するのが難しくなるが、テスト信号の振幅を小さくすることが可能になることで、センサ信号の復元の容易化が可能となる。
【0045】
(第2実施形態)
本発明の第2実施形態について説明する。本実施形態は、第1実施形態に対してブレーキECU1に入力される第1、第2信号を変更したものであり、その他に関しては第1実施形態と同様であるため、第1実施形態と異なる部分についてのみ説明する。
【0046】
図6は、ブレーキECU1と各種センサ2〜6との接続形態の一例を示した回路図である。この図に示すように、本実施形態では、各種センサ2〜6に備えられた第1、第2センサ部11、12にて、同一物理量に対して同一信号のセンサ信号を出力させている。
【0047】
また、タイマー14の計測に基づいてECU故障診断期間中にテスト信号発生器13からテスト信号を出力させるようにしているが、第1、第2センサ部11、12の一方のセンサ信号に対してはテスト信号を重畳し、他方に対しては反転させたテスト信号を重畳させるようにしている。具体的には、テスト信号発生器13の出力したテスト信号がNOT回路17にて反転されたのちミキシング部15に伝えられ、第1センサ部11の出力するセンサ信号に対して反転させたテスト信号を重畳することで第1信号を生成している。また、テスト信号発生器13の出力したテスト信号がバッファ18を通じてミキシング部16に伝えられ、第2センサ部12の出力するセンサ信号に対してテスト信号を重畳することで第2信号を生成している。この他の構成については基本的には第1実施形態と同様である。
【0048】
また、本実施形態では、ブレーキECU1のCPU1cにて実行する処理についても、第1実施形態と異なっている。図7に、ブレーキECU1のCPU1cにて実行される故障診断処理を含む制動制御のフローチャートを示すと共に、図8にECU故障診断期間を含めた各出力などのタイミングチャートを示し、これらの図を参照してCPU1cで実行される処理について説明する。
【0049】
図7に示す処理は、例えばイグニッションスイッチがオフからオンに切り替わったときから開始され、所定の制御周期毎に実行される。そして、本実施形態でも、イグニッションスイッチがオンされたのちのイニシャルチェック期間をECU故障診断期間としてブレーキECU1自身の故障診断を行い、その後にセンサ2〜6の故障診断を行うようにする。
【0050】
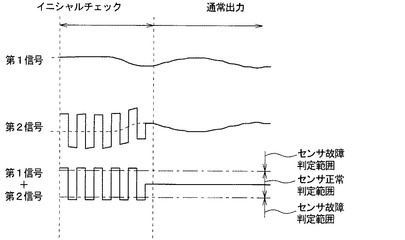
具体的には、まず、ステップ200、205では、図3のステップ100、105と同様に第1、第2信号を取得する。本実施形態の場合も、イグニッションスイッチがオフからオンに切り替わったと同時に、タイマー14にてECU故障診断期間が計測され、その期間中はテスト信号発生器13よりテスト信号が出力される。このため、第1センサ部11が出力するセンサ信号に対して反転させたテスト信号が重畳されたものが第1信号となり、第2センサ部12が出力するセンサ信号に対してテスト信号が重畳されたものが第2信号となる。すなわち、本実施形態の場合、第1、第2センサ11、12の出力するセンサ信号が同一物理量に対して同一信号となっている。また、テスト信号は所定振幅のパルス状となっている。このため、図8に示すように、第1、第2信号は、ECU故障診断期間中は逆位相で振幅するパルス波が同一信号とされたセンサ信号に重畳された信号となる。そして、ECU故障診断期間後には、第1、第2信号は、同一信号となる。
【0051】
続いて、ステップ210で図3のステップ110と同様に内部タイマ値が所定値T1未満であるか否かを判定し、肯定判定されればステップ215に進んで第1、第2信号を減算することによって減算値を演算する。この減算値は、第1、第2センサ部11、12の出力する同一信号とされたセンサ信号が差し引かれると共に逆位相で振幅するパルス波が足し合わされた値となることから、センサ信号成分については一定値(ゼロ)となり、テスト信号成分については二倍振幅として現れる。このため、減算値は、一定値を中心として大きく振幅する波形となる。
【0052】
そして、ステップ220に進み、ステップ215で演算した減算値に基づいて、ブレーキECU1の第1、第2センサ部11、12に備えられたセンサ素子の故障診断機能に係る故障の有無について判定する。ステップ215で演算された減算値は、図3のステップ115で演算された加算値と同様に、一定値を中心として大きく振幅する波形となることから、減算値がセンサ素子の故障と想定されるセンサ故障判定範囲に至っているか、それともセンサ正常判定範囲内であるかに基づいて、本ステップの判定を行うことができる。
【0053】
その後は、ステップ225〜240において、図3のステップ125〜140と同様の処理を行い、ブレーキECU1自身が故障しているか否かを判定して、本実施形態が対象とする故障が発生していなければ制動制御を実行し、故障していれば警告を行うと共に制動装置による制御を停止する。
【0054】
一方、ステップ210で否定(通常時)判定されると、ECU故障診断期間を超えて通常期間となっていることから、ステップ245に進む。そして、第1信号と第2信号を減算することによって減算値を演算したのち、この減算値に基づいて第1、第2センサ部11、12に備えられたセンサ素子に係る故障の有無を判定する。すなわち、減算値がセンサ正常判定範囲内であるかセンサ故障判定範囲内であるかを判定し、センサ正常判定範囲内であればセンサ素子が故障しておらず、センサ故障判定範囲内であればセンサ素子が故障していると判定し、その結果をCPU1c内の図示しないメモリなどに記憶しておく。
【0055】
その後は、ステップ250〜265において、図3のステップ150〜165と同様の処理を行い、センサ素子が故障しているか否かを判定して、故障していなければ制動制御を実行し、故障していれば警告を行うと共に制動装置による制御を禁止する。このようにして、故障診断処理を含めた制動制御が実行される。
【0056】
以上説明したように、第1、第2センサ部11、12にて同一物理量に対して同一信号となるセンサ信号を出力させ、ECU故障診断期間中は逆位相で振幅するパルス波が同一信号とされたセンサ信号に重畳されるようにした第1、第2信号を用いるようにしても、第1実施形態と同様の効果を得ることができる。
【0057】
(第3実施形態)
本発明の第3実施形態について説明する。本実施形態も、第1実施形態に対してブレーキECU1に入力される第1、第2信号を変更したものであり、その他に関しては第1実施形態と同様であるため、第1実施形態と異なる部分についてのみ説明する。
【0058】
図9は、ブレーキECU1と各種センサ2〜6との接続形態の一例を示した回路図である。この図に示すように、本実施形態では、各種センサ2〜6に備えられた第1、第2センサ部11、12にて、同一物理量に対して反転信号となるセンサ信号を出力させているが、テスト信号発生器13から出力されるテスト信号を第2センサ部12のセンサ信号のみに重畳させている。
【0059】
このように、テスト信号を第1、第2センサ部11、12の一方のセンサ信号にのみ重畳させる場合にも、図3のフローチャートで示した制動制御の各種処理を行うことにより、第1実施形態と同様に、センサ素子の故障に加えてブレーキECU1自身の故障診断処理を含めた制動制御を実行することができる。
【0060】
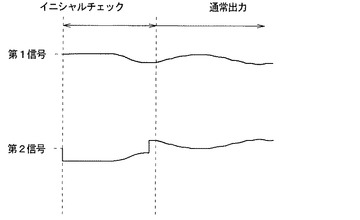
すなわち、本実施形態のように、テスト信号を第1、第2センサ部11、12の一方のセンサ信号にのみ重畳させる場合のタイミングチャートは図10のように表され、第1信号と第2信号の加算値が一定値を中心としてテスト信号分の振幅のパルス波が重畳された値となる。このため、第1実施形態と比較して、加算値の振幅が小さくなるものの、その振幅がセンサ故障判定範囲に至る大きさとなるように設定してあれば、第1実施形態と同様に、ECU故障診断期間中に加算値がセンサ故障判定範囲に至っているかセンサ正常判定範囲内であるかを判定することでブレーキECU1自身の故障診断が行える。
【0061】
このように、テスト信号を第1、第2センサ部11、12の一方のセンサ信号にのみ重畳させる場合にも、第1実施形態と同様の効果を得ることができる。このような構成とすれば、2つのセンサ素子に対応する信号線の両方に信号変化部を備える第1、第2実施形態と比較して、構成の簡略化を図ることが可能となる。
【0062】
(第4実施形態)
本発明の第4実施形態について説明する。本実施形態も、第1実施形態に対してブレーキECU1に入力される第1、第2信号を変更したものであり、その他に関しては第1実施形態と同様であるため、第1実施形態と異なる部分についてのみ説明する。
【0063】
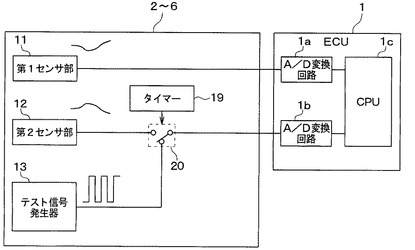
図11は、ブレーキECU1と各種センサ2〜6との接続形態の一例を示した回路図である。この図に示すように、本実施形態では、各種センサ2〜6に備えられた第1、第2センサ部11、12にて、同一物理量に対して反転信号となるセンサ信号を出力させているが、第1信号には第1センサ部11が出力するセンサ信号そのものを用い、第2信号には第2センサ部12が出力するセンサ信号を用いつつECU故障診断期間中は所定振幅のパルス状のテスト信号を用いるようにしている。具体的には、タイマー19によるスイッチ20の切替えによって、第2センサ部12が出力するセンサ信号とテスト信号発生器13の出力するテスト信号のいずれか一方が第2信号となるようにしている。すなわち、タイマー19によってECU故障診断期間を計測し、この期間中はテスト信号を第2信号とし、その期間後には第2センサ部12が出力するセンサ信号が第2信号となるようにしている。
【0064】
このように、ECU故障診断期間中はテスト信号が第2信号となるようにする場合にも、図3のフローチャートで示した制動制御の各種処理を行うことにより、第1実施形態と同様に、センサ素子の故障に加えてブレーキECU1自身の故障診断処理を含めた制動制御を実行することができる。
【0065】
すなわち、本実施形態のように、テスト信号を第1、第2センサ部11、12の一方のセンサ信号にのみ重畳させる場合のタイミングチャートは図12のように表され、加算値は、第1信号に対して第2信号、つまり所定振幅のパルス波からなるテスト信号が重畳された値となる。このため、加算値の振幅がセンサ故障判定範囲に至る大きさとなるように設定してあれば、第1実施形態と同様に、ECU故障診断期間中に加算値がセンサ故障判定範囲に至っているかセンサ正常判定範囲内であるかを判定することでブレーキECU1自身の故障診断が行える。
【0066】
このように、ECU故障診断期間中はテスト信号を第2信号とし、その期間後には第2センサ部12が出力するセンサ信号が第2信号となるようにしても、第1実施形態と同様の効果を得ることができる。また、このような構成とすれば、2つのセンサ素子に対応する信号線の両方に信号変化部を備える第1、第2実施形態と比較して、構成の簡略化を図ることが可能となる。
【0067】
(第5実施形態)
本発明の第5実施形態について説明する。本実施形態も、第1実施形態に対してブレーキECU1に入力される第1、第2信号を変更したものであり、その他に関しては第1実施形態と同様であるため、第1実施形態と異なる部分についてのみ説明する。
【0068】
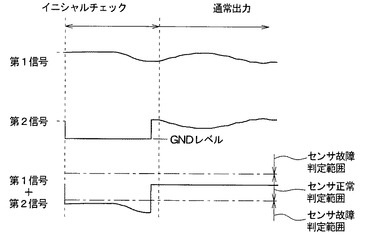
図13は、ブレーキECU1と各種センサ2〜6との接続形態の一例を示した回路図である。この図に示すように、本実施形態でも、各種センサ2〜6に備えられた第1、第2センサ部11、12にて、同一物理量に対して反転信号となるセンサ信号を出力させているが、第1信号には第1センサ部11が出力するセンサ信号そのものを用い、第2信号には第2センサ部12が出力するセンサ信号を用いつつECU故障診断期間中はGNDレベルに切替えるようにしている。具体的には、タイマー21によるスイッチ22の切替えによって、第2センサ部12が出力するセンサ信号とGNDレベルのいずれか一方が第2信号となるようにしている。すなわち、タイマー21によってECU故障診断期間を計測し、この期間中はGNDレベルを第2信号とし、その期間後には第2センサ部12が出力するセンサ信号が第2信号となるようにしている。
【0069】
このように、ECU故障診断期間中は第2信号がGNDレベルとなるようにする場合にも、図3のフローチャートで示した制動制御の各種処理を行うことにより、第1実施形態と同様に、センサ素子の故障に加えてブレーキECU1自身の故障診断処理を含めた制動制御を実行することができる。
【0070】
すなわち、本実施形態のように、ECU故障診断期間中に第2信号をGNDレベルにする場合のタイミングチャートは図14のように表され、加算値は、第1信号に対して第2信号、つまりGNDレベルが重畳された値となる。このため、GNDレベルが重畳された加算値がセンサ故障判定範囲に至る大きさとなるように設定してあれば、第1実施形態と同様に、ECU故障診断期間中に加算値がセンサ故障判定範囲に至っているかセンサ正常判定範囲内であるかを判定することでブレーキECU1自身の故障診断が行える。
【0071】
このように、ECU故障診断期間中は第2信号をGNDレベルとし、その期間後には第2センサ部12が出力するセンサ信号が第2信号となるようにしても、第1実施形態と同様の効果を得ることができる。また、このような構成とすれば、2つのセンサ素子に対応する信号線の両方に信号変化部を備える第1、第2実施形態と比較して、構成の簡略化を図ることが可能となる。
【0072】
(他の実施形態)
上記第1実施形態などでは、所定振幅のパルス状のテスト信号をセンサ信号に重畳するようにしたが、例えば図15に示すように、ECU故障診断期間中連続的に一定値の変動をセンサ信号に重畳させるようにしてもよい。また、上記第5実施形態では、第2信号をGNDレベルに低下させるようにしたが、第2信号を電源電圧Vccレベルに上昇させるようにしても構わない。
【0073】
また、上記第1、第2実施形態では、第1、第2センサ部11、12のセンサ信号に同一振幅のテスト信号を重畳させたが、それらの信号に異なる振幅のテスト信号を重畳しても良い。
【0074】
また、上記各実施形態では、第1、第2センサ部11、12のセンサ信号にテスト信号を重畳させたり、第2信号をGNDレベルにするなどにより、第1、第2センサ部11、12のセンサ素子に対応する信号線を通じてブレーキECU1に電送される第1、第2信号の信号値を変化させている。このように信号値を変化させる部分が本発明の信号変化部に相当し、上記各実施形態ではテスト信号発生器13、タイマー14、19、21、ミキシング部15、16、NOT回路17、スイッチ20、22などによって信号変化部を構成している。上記第1、第2実施形態では第1、第2センサ部11、12のセンサ信号の両方にテスト信号を重畳させて信号値を変化させるようにしているが、信号変化部は、第3〜第5実施形態のように、少なくとも第1、第2信号の一方の信号値を変化させるものであれば良い。
【0075】
また、上記各実施形態では、信号変化部が各種センサ2〜6内に備えられた構成について説明したが、各種センサ2〜6と別体とされていても良いし、ブレーキECU1内に備えられていても良い。また、ブレーキECU1に限らず、他のECUが備えられる制御装置であっても構わない。
【0076】
なお、各図中に示したステップは、各種処理を実行する各部もしくは各手段に対応するものである。具体的には、ブレーキECU1のうちステップ145、245の処理を実行する部分が第1故障検出部、ステップ120、220の処理を実行する部分が第2故障検出部に相当している。すなわち、ブレーキECU1のうちセンサ故障診断機能を実現する部分が第1故障検出部、ECU故障診断機能を実現する部分が第2故障検出部に相当している。また、ステップ130、230、155、255の処理を実行する部分がセンサ値生成手段に相当している。
【0077】
また、上記各実施形態では、イニシャルチェック中、常に第1、第2信号の信号値をセンサ故障判定範囲内の値に変化させたが、図16に示すように、当該信号値をセンサ正常判定範囲内の値およびセンサ故障判定範囲内の値に所定パターンで変化させても良い。この場合、ブレーキECU1のセンサ2〜6に係る故障検出部において上記所定パターン通りにセンサ2〜6に係る故障の有無が判定されなかった場合に、ブレーキECU1のセンサ2〜6に係る故障検出部が故障していることを判定する。
【0078】
また、上記実施形態において、「同一信号」はブレーキECU1の故障判定の精度が許す限り厳密に同位相の信号でなくても良いし、「反転信号」はブレーキECU1の故障判定の精度が許す限り逆位相の信号でなくても良い。
【符号の説明】
【0079】
1…ブレーキECU、1c…CPU、2…ストロークセンサ、3…圧力センサ、4…負圧センサ、5…ヨーレートセンサ、6…Gセンサ、7…メータ、8…アクチュエータ、11、12…第1、第2センサ部、13…テスト信号発生器、14、19、21…タイマー、15、16…ミキシング部、17…NOT回路、20、22…スイッチ
【技術分野】
【0001】
本発明は、センサ素子の故障を検出するセンサ故障診断機能を有する制御装置に関するものである。
【背景技術】
【0002】
従来、特許文献1において、複数のセンサが出力するセンサ信号を比較することによりセンサ素子の故障診断を行うブレーキ制御装置が提案されている。具体的には、特許文献1に示されるブレーキ制御装置では、同一物理量を検出する2つのセンサ素子が正常であれば2つのセンサ信号の加算値が予め決めておいた一定値となり、センサ素子が故障していると2つのセンサ信号の加算値がその一定値とならないことに基づき、センサ素子の故障診断を行っている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−167970号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記ブレーキ制御装置では、センサ素子の故障診断を行うことができるものの、ブレーキ制御装置によるセンサ素子の故障診断機能自体が故障した場合に、それを診断する機能がない。このため、センサ素子の故障診断を誤ってしまうという問題がある。このようなセンサ信号に基づいて制動制御を行うと、その制動制御を適切に行えなくなる可能性がある。
【0005】
なお、センサ素子の故障診断機能を有する制御装置において、外部端子を通じて制御装置にテスト信号を入力し、それを制御装置にて処理させたのち、もう一つの外部端子を通じて制御装置の出力として発生させるようにすることが考えられる。この場合、もう一つの外部端子を通じて発生させられた制御装置の出力が予め期待される出力であれば制御装置は正常で、期待される出力でなければ制御装置が故障していると診断できるが、テスト信号を入力するためと制御装置からの出力を発生させるための外部端子が必要になり、端子数を増加させてしまうことになる。
【0006】
本発明は上記点に鑑みて、端子数を増加させることなく、自身の故障診断を行うことができる制御装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するため、請求項1に記載の発明では、演算部(1c)により演算されている加算値または減算値が所定範囲外の値である場合に2つのセンサ素子のいずれかが故障していることを検出する第1故障検出部(145、245)を備えた制御装置において、信号変化部(13〜22)により、加算値または減算値が2つのセンサ素子のいずれかの故障を示す値となるように、2つの信号線によって電送される信号の少なくとも一方を変化させ、この2つの信号線によって電送される信号を、加算値または減算値が2つのセンサ素子の故障を示す値となるように変化させている状態で、第1故障検出部により2つのセンサ素子が正常であることが検出されている場合に、第2故障検出部(120、220)にて第1故障検出部が故障していることを検出することを特徴としている。
【0008】
このように、加算値または減算値が2つのセンサ素子の故障を示す値となるように変化させている状態で、第1故障検出部により2つのセンサ素子が正常であることが検出されたときに、第1故障検出部の故障と診断できる。これにより、センサ素子の故障診断に加えて、制御装置自身の故障診断を行うことが可能となる。そして、制御装置に対して、テスト信号の入力のための端子やその結果を出力するための端子を備えなくても、制御装置自身の故障診断が行える。このため、端子数を増加させることなく、自身の故障診断を行うことが可能となる。
【0009】
請求項2に記載の発明では、2つのセンサ素子にて同一物理量に対して反転信号をセンサ信号として出力させ、信号変化部を2つのセンサ素子に対応する2つの信号線の双方に設け、2つのセンサ素子の出力するセンサ信号に対して同一のテスト信号を重畳して2つの信号線によって電送される2つの信号を変化させている。このような構成において、演算手段にて、2つの信号線によって電送される信号の信号値を加算して加算値を演算し、第1故障検出部にて、演算部により演算されている加算値が所定範囲外の値である場合に2つのセンサ素子のいずれかが故障していることを検出し、センサ値生成手段(130、155)にて、2つの信号線によって電送される信号の信号値を減算して物理量に相関する値を生成している。
【0010】
このように、2つの信号線によって電送される2つの信号を信号変化部によって変化させ、それぞれにテスト信号を重畳している。このようにすれば、演算部により演算されている加算値の振幅がテスト信号成分の二倍振幅となるようにできる。このため、テスト信号の振幅を小さくしても、テスト信号に基づいて制御装置自身の故障診断を行うことができる。したがって、テスト信号の振幅を大きくした場合には、テスト信号が重畳された信号からセンサ素子の出力した信号を復元するのが難しくなるが、テスト信号の振幅を小さくすることが可能になることで、センサ信号の復元の容易化が可能となる。
【0011】
請求項3に記載の発明では、2つのセンサ素子にて同一物理量に対して同一信号をセンサ信号として出力させ、信号変化部を2つのセンサ素子に対応する2つの信号線のいずれにも設け、2つのセンサ素子の出力したセンサ信号に対して互いに反転したテスト信号を重畳して2つの信号線によって電送される2つの信号を変化させている。このような構成において、演算手段にて、2つの信号線によって電送される信号の信号値を減算して減算値を演算し、第1故障検出部にて、演算部により演算されている減算値が所定範囲外の値である場合に2つのセンサ素子のいずれかが故障していることを検出し、センサ値生成手段(230、255)にて、2つの信号線によって電送される信号の信号値を加算して物理量に相関する値を生成している。
【0012】
このように、2つのセンサ素子にて同一物理量に対して同一信号をセンサ信号として出力させ、2つのセンサ素子の出力したセンサ信号に対して互いに反転したテスト信号を重畳させる場合にも、請求項2と同様の効果を得ることができる。
【0013】
請求項4に記載の発明では、信号変化部は、2つのセンサ素子に対応する信号線のいずれか一方に設けられていることを特徴としている。
【0014】
このように、2つのセンサ素子に対応する信号線のいずれか一方にのみ信号変化部を備えるようにしても、制御装置自身の故障を検出できる。このような構成とすれば、2つのセンサ素子に対応する信号線の両方に信号変化部を備える場合と比較して、構成の簡略化を図ることが可能となる。
【0015】
なお、上記各手段の括弧内の符号は、後述する実施形態に記載の具体的手段との対応関係の一例を示すものである。
【図面の簡単な説明】
【0016】
【図1】本発明の第1実施形態にかかるブレーキECUの電気的構成を示したブロック図である。
【図2】ブレーキECU1と各種センサ2〜6との接続形態の一例を示した回路図である。
【図3】ブレーキECU1のCPU1cにて実行される故障診断処理を含む制動制御のフローチャートである。
【図4】ECU故障診断期間を含めた各出力などのタイミングチャートである。
【図5】被検出物に対して第1、第2センサ部11、12から出力されるセンサ信号の波形と各センサ信号の加算値の範囲を示したグラフである。
【図6】本発明の第2実施形態にかかるブレーキECU1と各種センサ2〜6との接続形態の一例を示した回路図である。
【図7】ブレーキECU1のCPU1cにて実行される故障診断処理を含む制動制御のフローチャートである。
【図8】ECU故障診断期間を含めた各出力などのタイミングチャートである。
【図9】本発明の第3実施形態にかかるブレーキECU1と各種センサ2〜6との接続形態の一例を示した回路図である。
【図10】テスト信号を第1、第2センサ部11、12の一方のセンサ信号にのみ重畳させる場合のタイミングチャートである。
【図11】本発明の第4実施形態にかかるブレーキECU1と各種センサ2〜6との接続形態の一例を示した回路図である。
【図12】テスト信号を第1、第2センサ部11、12の一方のセンサ信号にのみ重畳させる場合のタイミングチャートである。
【図13】本発明の第5実施形態にかかるブレーキECU1と各種センサ2〜6との接続形態の一例を示した回路図である。
【図14】ECU故障診断期間中に第2信号をGNDレベルにする場合のタイミングチャートである。
【図15】他の実施形態で説明するテスト信号を重畳したときの波形を示した図である。
【図16】他の実施形態で説明するテスト信号を重畳したときの波形を示した図である。
【発明を実施するための形態】
【0017】
以下、本発明の実施形態について図に基づいて説明する。なお、以下の各実施形態相互において、互いに同一もしくは均等である部分には、図中、同一符号を付してある。
【0018】
(第1実施形態)
本発明の第1実施形態について説明する。本実施形態では、制動の制御を行うブレーキ用電子制御装置(以下、ブレーキECUという)を例に挙げて故障診断機能を有する制御装置について説明する。本実施形態の場合、ブレーキECUと各種センサに備えられた一部によって本発明の制御装置を構成している。
【0019】
図1は、本実施形態にかかるブレーキECUの電気的構成を示したブロック図である。この図に示すように、ブレーキECU1は、図示しないブレーキシステムの各所に備えられたストロークセンサ2、圧力センサ3、負圧センサ4、ヨーレートセンサ5、加速度(G)センサ6などと信号線を介して接続されており、信号線から電送される信号を入力し、入力した信号に基づいて各種演算などを行うことで、図示しない制動装置を用いた制動制御を実行している。
【0020】
ストロークセンサ2は、図示しないブレーキペダルのストローク量などの検出に用いられ、ストロークに応じたセンサ信号を発生させている。圧力センサ3は、マスタシリンダ圧などの検出に用いられ、検出された圧力に応じたセンサ信号を発生させている。負圧センサ4は、エンジン負圧などの検出に用いられ、検出された負圧に応じたセンサ信号を発生させている。ヨーレートセンサ5は、車両に発生しているヨー値の検出に用いられ、検出されたヨー値に応じたセンサ信号を発生させている。Gセンサ6は、車両に発生している前後加速度もしくは横加速度の検出に用いられ、検出された加速度に応じたセンサ信号を発生させている。これら各種センサ2〜6のセンサ信号がそれぞれブレーキECU1に対して入力され、アンチスキッド制御や横滑り防止制御等の制動制御に用いられている。
【0021】
図2は、ブレーキECU1と各種センサ2〜6との接続形態の一例を示した回路図である。ここでは、各種センサ2〜6の一つとして、ストロークセンサ2がブレーキECU1に接続されている場合を例として説明するが、他のセンサ3〜6とブレーキECU1とについても同様の接続形態を適用できる。
【0022】
図2に示すように、各種センサ2〜6には、第1、第2センサ部11、12が備えられている。第1、第2センサ部11、12にはセンサ素子が備えられており、センサ素子に対応する信号線に接続され、センサ素子にて検出された各種物理量(例えばストロークセンサ2であればストローク)に応じたセンサ信号が第1、第2センサ部11、12からそれぞれ出力される。第1、第2センサ部11、12は、同一物理量に対して同一信号または反転信号となるセンサ信号を出力するが、本実施形態の場合には反転信号を出力させている。
【0023】
また、各種センサ2〜6には、テスト信号発生器13およびタイマー14が備えられていると共に、ミキシング部15、16が備えられている。テスト信号発生器13は、ブレーキECU1の故障検出用のテスト信号(擬似故障信号)を出力するものであり、本実施形態ではテスト信号として所定振幅のパルス状の出力を発生させている。タイマー14は、ブレーキECU1のセンサ故障診断機能の故障診断を行う期間(以下、ECU故障診断期間という)を計測するためのものであり、そのECU故障診断期間になるとテスト信号発生器13にテスト信号を発生させる。タイマー14は、予め決められた期間をECU故障診断期間として計測するが、本実施形態の場合は、その一例としてイグニッションスイッチがオフからオンに切替えられたときからECU故障診断期間の計測を開始するようにしている。ミキシング部15、16は、第1、第2センサ部11、12の出力したセンサ信号に対してテスト信号発生器13が出力したテスト信号を重畳させる。
【0024】
このように、各種センサ2〜6は、第1、第2センサ11、12の出力する2つのセンサ信号をブレーキECU1に伝えており、故障診断期間中には2つのセンサ信号それぞれにテスト信号発生器13が出力するテスト信号を重畳した信号をブレーキECU1に伝えている。
【0025】
ブレーキECU1は、内蔵されたA/D変換回路1a、1bを通じて中央演算回路(以下、CPUという)1cにセンサ信号もしくはセンサ信号に対してテスト信号が重畳された信号を入力し、入力した信号に基づいて故障診断や各種制動制御を実行している。故障診断としては、第1、第2センサ部11、12(具体的にはセンサ素子)の故障やブレーキECU1のセンサ故障診断機能の故障(以下、ブレーキECU1自身の故障という)の診断を行っている。
【0026】
そして、ブレーキECU1は、第1、第2センサ部11、12(具体的にはセンサ素子)の故障やブレーキECU1自身の故障診断結果に基づいて、各種故障が診断されると、メータ7に対してその旨を伝え、メータ7に備えられたインジケータを通じて各種故障を表示する。また、ブレーキECU1は、センサ信号に基づいて、制動装置に備えられるアクチュエータ8、例えば制御弁やポンプ駆動用のモータを制御することにより、アンチスキッド制御や横滑り防止制御等の制動制御を実行する。
【0027】
このような構成では、テスト信号発生器13やタイマー14およびミキシング部15、16が2つのセンサ素子に対応する2つの信号線によって電送されるセンサ信号を変化させる信号変化部を構成し、これらとブレーキECU1とによって制御装置が構成されている。
【0028】
続いて、本実施形態にかかるブレーキECU1に備えられた故障診断機能に基づく故障診断の方法について説明する。
【0029】
本実施形態にかかるブレーキECU1は、故障診断機能として、センサ2〜6の故障、具体的にはセンサ2〜6に備えられた第1、第2センサ部11、12のいずれかの故障を検出するセンサ故障診断機能に加えて、ブレーキECU1自身の故障を検出するECU故障診断機能を有している。これらの故障診断を行った上で各種制動制御を実行するようにしている。図3に、ブレーキECU1のCPU1cにて実行される故障診断処理を含む制動制御のフローチャートを示すと共に、図4にECU故障診断期間を含めた各出力などのタイミングチャートを示し、これらの図を参照してCPU1cで実行される処理について説明する。
【0030】
図3に示す処理は、例えばイグニッションスイッチがオフからオンに切り替わったときから開始され、所定の制御周期毎に実行される。そして、本実施形態では、イグニッションスイッチがオンされたのちのイニシャルチェック期間をECU故障診断期間としてブレーキECU1自身の故障診断を行い、その後にセンサ2〜6の故障診断を行うようにする。
【0031】
具体的には、まず、ステップ100において第1信号を取得すると共に、ステップ105において第2信号を取得する。第1、第2信号とは、A/D変換回路1a、1bを介してCPU1cに入力される信号のことである。本実施形態の場合、イグニッションスイッチがオフからオンに切り替わったと同時に、タイマー14にてECU故障診断期間を計測しており、その期間中はテスト信号発生器13より各センサ部11、12が出力するセンサ信号に対してテスト信号が重畳されることになる。本実施形態の場合、第1、第2センサ11、12の出力するセンサ信号は同一物理量に対して互いに反転信号となっている。また、テスト信号は所定振幅のパルス状となっている。このため、図4に示すように、第1、第2信号は、ECU故障診断期間中は同位相で振幅するパルス波にて構成されるテスト信号が互いに反転する反転信号とされたセンサ信号に重畳された信号となる。そして、ECU故障診断期間後には、第1、第2信号は、互いに反転する反転信号とされたセンサ信号となる。
【0032】
続く、ステップ110では、内部タイマ値が所定値T1未満であるか否かを判定する。内部タイマ値は、CPU1cの内部に備えられたタイマによって計測される値であり、所定値T1は、ECU故障診断期間に相当する値である。CPU1cは、内部タイマによってECU故障診断期間を計測しており、内部タイマ値が所定値T1未満であるか否かに基づいて、ECU故障診断期間中であるか否かを判定している。
【0033】
このステップ110で肯定判定されればECU故障診断期間中であることからステップ115に進み、第1信号と第2信号を加算することによって加算値を演算する。この加算値は、図4に示すように、第1、第2センサ部11、12の出力する互いに反転するセンサ信号が足し合わされると共に同位相で振幅するパルス波からなるテスト信号が足し合わされた値となることから、センサ信号成分については一定値となり、テスト信号成分については二倍振幅として現れる。このため、加算値は、一定値を中心として大きく振幅する波形となる。
【0034】
そして、ステップ120に進み、ステップ115で演算した加算値に基づいて、ブレーキECU1のセンサ素子の故障診断機能に係る故障の有無、つまりブレーキECU1自身の故障が発生しているか否かについて判定する。具体的には、加算値がセンサ素子の故障を示す値となるセンサ故障判定範囲に至っているか否かに基づいて、本ステップの判定を行っている。ここで、センサ故障判定範囲について、図5を参照して説明する。
【0035】
図5は、被検出物(例えばストロークセンサ2であればストローク)に対して第1、第2センサ部11、12から出力されるセンサ信号の波形と各センサ信号の加算値の範囲を示したグラフである。
【0036】
この図に示すように、第1センサ部11のセンサ信号は被検出物の値が大きくなるほど小さくなり、逆に、第2センサ部12のセンサ信号は被検出物の値が小さくなるほど大きくなる。このように、第1、第2センサ部11、12のセンサ信号は反転信号となっている。このため、これら第1、第2センサ部11、12のセンサ信号の加算値は、一定値となり図4中に示したセンサ正常判定範囲内に収まることになる。このセンサ正常判定範囲がセンサ素子が故障していないと想定される範囲であり、このセンサ正常判定範囲を超えた範囲がセンサ故障判定範囲となる。
【0037】
後述するECU故障診断期間経過後には、センサ2〜6の故障診断を行うことになり、第1、第2信号の加算値がセンサ正常判定範囲内にあるか否かを判定することになる。しかしながら、ECU故障診断期間中には、センサ素子の故障を示す値となるように第1、第2信号を変化させ、その加算値がテスト信号成分を含んだ値になることで、意図的にセンサ故障判定範囲に至るようにしてある。
【0038】
したがって、ブレーキECU1のセンサ2〜6の故障検出部が正常であれば、ECU故障診断期間中は第1、第2信号の加算値がセンサ故障判定範囲に至ることとなり、センサ正常判定範囲内であれば逆にブレーキECU1が故障していることとなる。これに基づき、ステップ120では、ECU故障判断期間中に第1、第2信号の加算値がセンサ正常判定範囲内であるかセンサ故障判定範囲に至っているかに基づいて、センサ2〜6に係る故障の有無を判定しておき、その結果をCPU1c内の図示しないメモリなどに記憶しておく。
【0039】
そしてステップ125に進み、ステップ120の結果を用いてセンサ2〜6が正常であるか否かを判定する。そして、センサ2〜6が故障していれば、ブレーキECU1のセンサ2〜6に係る故障検出部において本実施形態が対象とする故障は発生していないため、ステップ130に進んで第1、第2信号からセンサ値を復元し、復元したセンサ値に基づいて制動装置を用いた制動制御、例えばアクチュエータ8を駆動してアンチスキッド制御や横滑り防止制御等を実行する。また、センサ2〜6が正常であれば、ブレーキECU1は故障しており、ステップ135に進んでブレーキECU1が故障していることをメータ7に伝えたのち、ステップ140に進んで制動装置による制御を停止する。これにより、メータ7に備えられたインジケータなどを用いて、ブレーキECU1が故障していることが表示されると共に、制動装置による制御が停止されることで、故障したブレーキECU1の誤った処理に基づいて制動制御が実施されないようにすることが可能となる。
【0040】
一方、ステップ110で否定(通常時)判定されると、ECU故障診断期間を超えて通常期間となっていることから、ステップ145に進む。そして、第1信号と第2信号を加算することによって加算値を演算したのち、この加算値に基づいて第1、第2センサ部11、12に備えられたセンサ素子に係る故障の有無を判定する。すなわち、上記したように、加算値がセンサ正常判定範囲内であるかセンサ故障判定範囲内であるかを判定し、センサ正常判定範囲内であればセンサ素子が故障しておらず、センサ故障判定範囲内であればセンサ素子が故障していると判定し、その結果をCPU1c内の図示しないメモリなどに記憶しておく。
【0041】
その後、ステップ150に進み、ステップ145の結果を用いてセンサ素子が故障中であるか否かを判定する。ここで、センサ素子が故障中でなければステップ155に進み、センサ信号に基づいて制動装置を用いて制動制御を実行する。このとき用いられるセンサ信号としては、第1信号、第2信号、もしくは第1信号と第2信号の差(例えば第1信号−第2信号)がある。すなわち、第1信号、第2信号は、ECU故障診断期間後には単純に第1、第2センサ部11、12の出力するセンサ信号となることから、それ自体が被検出物の値に対応した値となる。また、第1信号と第2信号の差は、これらが互いに反転した反転信号であることから、図4中に示したように被検出物の値に対応した値となる。このため、第1信号、第2信号、もしくは第1信号と第2信号の差をセンサ信号として用いて、制動制御を実行することができる。このようにして、故障診断処理を含めた制動制御が実行される。
【0042】
一方、センサが故障中であればステップ160に進んでセンサが故障していることをメータ7に伝えたのち、ステップ165に進んでその故障しているセンサによる制動装置の制御を禁止する。これにより、メータ7に備えられたインジケータなどを用いて、センサ2〜6のいずれかが故障していることが表示されると共に、そのセンサによる制動装置による制御が禁止され、誤ったセンサ信号に基づいて制動制御が実行されることが防止される。例えば、ヨーレートセンサ5等のように横滑り防止制御に用いられるセンサが故障している場合には、横滑り防止制御を禁止するなどの処理を行うようにしている。
【0043】
以上説明したように、本実施形態にかかるブレーキECU1によれば、センサ素子の故障診断に加えて、ブレーキECU1自身の故障診断、具体的にはセンサ素子の故障を検出している故障診断機能の故障診断を行うことが可能となる。そして、ブレーキECU1に対して、ブレーキECU1自身の故障診断をテスト信号の入力のための端子やその結果を出力するための端子を備えなくても、ブレーキECU1自身の故障診断が行える。このため、端子数を増加させることなく、自身の故障診断を行うことが可能となる。
【0044】
また、本実施形態では、2つの信号線によって電送されるセンサ信号の両方にテスト信号を重畳させることで第1、第2信号を変化させるようにしている。このようにすれば、第1信号と第2信号の加算値の振幅がテスト信号成分の二倍振幅となるようにできる。このため、テスト信号の振幅を小さくしても、テスト信号に基づいてブレーキECU1自身の故障診断を行うことができる。したがって、テスト信号の振幅を大きくした場合には、第1、第2信号からセンサ信号を復元するのが難しくなるが、テスト信号の振幅を小さくすることが可能になることで、センサ信号の復元の容易化が可能となる。
【0045】
(第2実施形態)
本発明の第2実施形態について説明する。本実施形態は、第1実施形態に対してブレーキECU1に入力される第1、第2信号を変更したものであり、その他に関しては第1実施形態と同様であるため、第1実施形態と異なる部分についてのみ説明する。
【0046】
図6は、ブレーキECU1と各種センサ2〜6との接続形態の一例を示した回路図である。この図に示すように、本実施形態では、各種センサ2〜6に備えられた第1、第2センサ部11、12にて、同一物理量に対して同一信号のセンサ信号を出力させている。
【0047】
また、タイマー14の計測に基づいてECU故障診断期間中にテスト信号発生器13からテスト信号を出力させるようにしているが、第1、第2センサ部11、12の一方のセンサ信号に対してはテスト信号を重畳し、他方に対しては反転させたテスト信号を重畳させるようにしている。具体的には、テスト信号発生器13の出力したテスト信号がNOT回路17にて反転されたのちミキシング部15に伝えられ、第1センサ部11の出力するセンサ信号に対して反転させたテスト信号を重畳することで第1信号を生成している。また、テスト信号発生器13の出力したテスト信号がバッファ18を通じてミキシング部16に伝えられ、第2センサ部12の出力するセンサ信号に対してテスト信号を重畳することで第2信号を生成している。この他の構成については基本的には第1実施形態と同様である。
【0048】
また、本実施形態では、ブレーキECU1のCPU1cにて実行する処理についても、第1実施形態と異なっている。図7に、ブレーキECU1のCPU1cにて実行される故障診断処理を含む制動制御のフローチャートを示すと共に、図8にECU故障診断期間を含めた各出力などのタイミングチャートを示し、これらの図を参照してCPU1cで実行される処理について説明する。
【0049】
図7に示す処理は、例えばイグニッションスイッチがオフからオンに切り替わったときから開始され、所定の制御周期毎に実行される。そして、本実施形態でも、イグニッションスイッチがオンされたのちのイニシャルチェック期間をECU故障診断期間としてブレーキECU1自身の故障診断を行い、その後にセンサ2〜6の故障診断を行うようにする。
【0050】
具体的には、まず、ステップ200、205では、図3のステップ100、105と同様に第1、第2信号を取得する。本実施形態の場合も、イグニッションスイッチがオフからオンに切り替わったと同時に、タイマー14にてECU故障診断期間が計測され、その期間中はテスト信号発生器13よりテスト信号が出力される。このため、第1センサ部11が出力するセンサ信号に対して反転させたテスト信号が重畳されたものが第1信号となり、第2センサ部12が出力するセンサ信号に対してテスト信号が重畳されたものが第2信号となる。すなわち、本実施形態の場合、第1、第2センサ11、12の出力するセンサ信号が同一物理量に対して同一信号となっている。また、テスト信号は所定振幅のパルス状となっている。このため、図8に示すように、第1、第2信号は、ECU故障診断期間中は逆位相で振幅するパルス波が同一信号とされたセンサ信号に重畳された信号となる。そして、ECU故障診断期間後には、第1、第2信号は、同一信号となる。
【0051】
続いて、ステップ210で図3のステップ110と同様に内部タイマ値が所定値T1未満であるか否かを判定し、肯定判定されればステップ215に進んで第1、第2信号を減算することによって減算値を演算する。この減算値は、第1、第2センサ部11、12の出力する同一信号とされたセンサ信号が差し引かれると共に逆位相で振幅するパルス波が足し合わされた値となることから、センサ信号成分については一定値(ゼロ)となり、テスト信号成分については二倍振幅として現れる。このため、減算値は、一定値を中心として大きく振幅する波形となる。
【0052】
そして、ステップ220に進み、ステップ215で演算した減算値に基づいて、ブレーキECU1の第1、第2センサ部11、12に備えられたセンサ素子の故障診断機能に係る故障の有無について判定する。ステップ215で演算された減算値は、図3のステップ115で演算された加算値と同様に、一定値を中心として大きく振幅する波形となることから、減算値がセンサ素子の故障と想定されるセンサ故障判定範囲に至っているか、それともセンサ正常判定範囲内であるかに基づいて、本ステップの判定を行うことができる。
【0053】
その後は、ステップ225〜240において、図3のステップ125〜140と同様の処理を行い、ブレーキECU1自身が故障しているか否かを判定して、本実施形態が対象とする故障が発生していなければ制動制御を実行し、故障していれば警告を行うと共に制動装置による制御を停止する。
【0054】
一方、ステップ210で否定(通常時)判定されると、ECU故障診断期間を超えて通常期間となっていることから、ステップ245に進む。そして、第1信号と第2信号を減算することによって減算値を演算したのち、この減算値に基づいて第1、第2センサ部11、12に備えられたセンサ素子に係る故障の有無を判定する。すなわち、減算値がセンサ正常判定範囲内であるかセンサ故障判定範囲内であるかを判定し、センサ正常判定範囲内であればセンサ素子が故障しておらず、センサ故障判定範囲内であればセンサ素子が故障していると判定し、その結果をCPU1c内の図示しないメモリなどに記憶しておく。
【0055】
その後は、ステップ250〜265において、図3のステップ150〜165と同様の処理を行い、センサ素子が故障しているか否かを判定して、故障していなければ制動制御を実行し、故障していれば警告を行うと共に制動装置による制御を禁止する。このようにして、故障診断処理を含めた制動制御が実行される。
【0056】
以上説明したように、第1、第2センサ部11、12にて同一物理量に対して同一信号となるセンサ信号を出力させ、ECU故障診断期間中は逆位相で振幅するパルス波が同一信号とされたセンサ信号に重畳されるようにした第1、第2信号を用いるようにしても、第1実施形態と同様の効果を得ることができる。
【0057】
(第3実施形態)
本発明の第3実施形態について説明する。本実施形態も、第1実施形態に対してブレーキECU1に入力される第1、第2信号を変更したものであり、その他に関しては第1実施形態と同様であるため、第1実施形態と異なる部分についてのみ説明する。
【0058】
図9は、ブレーキECU1と各種センサ2〜6との接続形態の一例を示した回路図である。この図に示すように、本実施形態では、各種センサ2〜6に備えられた第1、第2センサ部11、12にて、同一物理量に対して反転信号となるセンサ信号を出力させているが、テスト信号発生器13から出力されるテスト信号を第2センサ部12のセンサ信号のみに重畳させている。
【0059】
このように、テスト信号を第1、第2センサ部11、12の一方のセンサ信号にのみ重畳させる場合にも、図3のフローチャートで示した制動制御の各種処理を行うことにより、第1実施形態と同様に、センサ素子の故障に加えてブレーキECU1自身の故障診断処理を含めた制動制御を実行することができる。
【0060】
すなわち、本実施形態のように、テスト信号を第1、第2センサ部11、12の一方のセンサ信号にのみ重畳させる場合のタイミングチャートは図10のように表され、第1信号と第2信号の加算値が一定値を中心としてテスト信号分の振幅のパルス波が重畳された値となる。このため、第1実施形態と比較して、加算値の振幅が小さくなるものの、その振幅がセンサ故障判定範囲に至る大きさとなるように設定してあれば、第1実施形態と同様に、ECU故障診断期間中に加算値がセンサ故障判定範囲に至っているかセンサ正常判定範囲内であるかを判定することでブレーキECU1自身の故障診断が行える。
【0061】
このように、テスト信号を第1、第2センサ部11、12の一方のセンサ信号にのみ重畳させる場合にも、第1実施形態と同様の効果を得ることができる。このような構成とすれば、2つのセンサ素子に対応する信号線の両方に信号変化部を備える第1、第2実施形態と比較して、構成の簡略化を図ることが可能となる。
【0062】
(第4実施形態)
本発明の第4実施形態について説明する。本実施形態も、第1実施形態に対してブレーキECU1に入力される第1、第2信号を変更したものであり、その他に関しては第1実施形態と同様であるため、第1実施形態と異なる部分についてのみ説明する。
【0063】
図11は、ブレーキECU1と各種センサ2〜6との接続形態の一例を示した回路図である。この図に示すように、本実施形態では、各種センサ2〜6に備えられた第1、第2センサ部11、12にて、同一物理量に対して反転信号となるセンサ信号を出力させているが、第1信号には第1センサ部11が出力するセンサ信号そのものを用い、第2信号には第2センサ部12が出力するセンサ信号を用いつつECU故障診断期間中は所定振幅のパルス状のテスト信号を用いるようにしている。具体的には、タイマー19によるスイッチ20の切替えによって、第2センサ部12が出力するセンサ信号とテスト信号発生器13の出力するテスト信号のいずれか一方が第2信号となるようにしている。すなわち、タイマー19によってECU故障診断期間を計測し、この期間中はテスト信号を第2信号とし、その期間後には第2センサ部12が出力するセンサ信号が第2信号となるようにしている。
【0064】
このように、ECU故障診断期間中はテスト信号が第2信号となるようにする場合にも、図3のフローチャートで示した制動制御の各種処理を行うことにより、第1実施形態と同様に、センサ素子の故障に加えてブレーキECU1自身の故障診断処理を含めた制動制御を実行することができる。
【0065】
すなわち、本実施形態のように、テスト信号を第1、第2センサ部11、12の一方のセンサ信号にのみ重畳させる場合のタイミングチャートは図12のように表され、加算値は、第1信号に対して第2信号、つまり所定振幅のパルス波からなるテスト信号が重畳された値となる。このため、加算値の振幅がセンサ故障判定範囲に至る大きさとなるように設定してあれば、第1実施形態と同様に、ECU故障診断期間中に加算値がセンサ故障判定範囲に至っているかセンサ正常判定範囲内であるかを判定することでブレーキECU1自身の故障診断が行える。
【0066】
このように、ECU故障診断期間中はテスト信号を第2信号とし、その期間後には第2センサ部12が出力するセンサ信号が第2信号となるようにしても、第1実施形態と同様の効果を得ることができる。また、このような構成とすれば、2つのセンサ素子に対応する信号線の両方に信号変化部を備える第1、第2実施形態と比較して、構成の簡略化を図ることが可能となる。
【0067】
(第5実施形態)
本発明の第5実施形態について説明する。本実施形態も、第1実施形態に対してブレーキECU1に入力される第1、第2信号を変更したものであり、その他に関しては第1実施形態と同様であるため、第1実施形態と異なる部分についてのみ説明する。
【0068】
図13は、ブレーキECU1と各種センサ2〜6との接続形態の一例を示した回路図である。この図に示すように、本実施形態でも、各種センサ2〜6に備えられた第1、第2センサ部11、12にて、同一物理量に対して反転信号となるセンサ信号を出力させているが、第1信号には第1センサ部11が出力するセンサ信号そのものを用い、第2信号には第2センサ部12が出力するセンサ信号を用いつつECU故障診断期間中はGNDレベルに切替えるようにしている。具体的には、タイマー21によるスイッチ22の切替えによって、第2センサ部12が出力するセンサ信号とGNDレベルのいずれか一方が第2信号となるようにしている。すなわち、タイマー21によってECU故障診断期間を計測し、この期間中はGNDレベルを第2信号とし、その期間後には第2センサ部12が出力するセンサ信号が第2信号となるようにしている。
【0069】
このように、ECU故障診断期間中は第2信号がGNDレベルとなるようにする場合にも、図3のフローチャートで示した制動制御の各種処理を行うことにより、第1実施形態と同様に、センサ素子の故障に加えてブレーキECU1自身の故障診断処理を含めた制動制御を実行することができる。
【0070】
すなわち、本実施形態のように、ECU故障診断期間中に第2信号をGNDレベルにする場合のタイミングチャートは図14のように表され、加算値は、第1信号に対して第2信号、つまりGNDレベルが重畳された値となる。このため、GNDレベルが重畳された加算値がセンサ故障判定範囲に至る大きさとなるように設定してあれば、第1実施形態と同様に、ECU故障診断期間中に加算値がセンサ故障判定範囲に至っているかセンサ正常判定範囲内であるかを判定することでブレーキECU1自身の故障診断が行える。
【0071】
このように、ECU故障診断期間中は第2信号をGNDレベルとし、その期間後には第2センサ部12が出力するセンサ信号が第2信号となるようにしても、第1実施形態と同様の効果を得ることができる。また、このような構成とすれば、2つのセンサ素子に対応する信号線の両方に信号変化部を備える第1、第2実施形態と比較して、構成の簡略化を図ることが可能となる。
【0072】
(他の実施形態)
上記第1実施形態などでは、所定振幅のパルス状のテスト信号をセンサ信号に重畳するようにしたが、例えば図15に示すように、ECU故障診断期間中連続的に一定値の変動をセンサ信号に重畳させるようにしてもよい。また、上記第5実施形態では、第2信号をGNDレベルに低下させるようにしたが、第2信号を電源電圧Vccレベルに上昇させるようにしても構わない。
【0073】
また、上記第1、第2実施形態では、第1、第2センサ部11、12のセンサ信号に同一振幅のテスト信号を重畳させたが、それらの信号に異なる振幅のテスト信号を重畳しても良い。
【0074】
また、上記各実施形態では、第1、第2センサ部11、12のセンサ信号にテスト信号を重畳させたり、第2信号をGNDレベルにするなどにより、第1、第2センサ部11、12のセンサ素子に対応する信号線を通じてブレーキECU1に電送される第1、第2信号の信号値を変化させている。このように信号値を変化させる部分が本発明の信号変化部に相当し、上記各実施形態ではテスト信号発生器13、タイマー14、19、21、ミキシング部15、16、NOT回路17、スイッチ20、22などによって信号変化部を構成している。上記第1、第2実施形態では第1、第2センサ部11、12のセンサ信号の両方にテスト信号を重畳させて信号値を変化させるようにしているが、信号変化部は、第3〜第5実施形態のように、少なくとも第1、第2信号の一方の信号値を変化させるものであれば良い。
【0075】
また、上記各実施形態では、信号変化部が各種センサ2〜6内に備えられた構成について説明したが、各種センサ2〜6と別体とされていても良いし、ブレーキECU1内に備えられていても良い。また、ブレーキECU1に限らず、他のECUが備えられる制御装置であっても構わない。
【0076】
なお、各図中に示したステップは、各種処理を実行する各部もしくは各手段に対応するものである。具体的には、ブレーキECU1のうちステップ145、245の処理を実行する部分が第1故障検出部、ステップ120、220の処理を実行する部分が第2故障検出部に相当している。すなわち、ブレーキECU1のうちセンサ故障診断機能を実現する部分が第1故障検出部、ECU故障診断機能を実現する部分が第2故障検出部に相当している。また、ステップ130、230、155、255の処理を実行する部分がセンサ値生成手段に相当している。
【0077】
また、上記各実施形態では、イニシャルチェック中、常に第1、第2信号の信号値をセンサ故障判定範囲内の値に変化させたが、図16に示すように、当該信号値をセンサ正常判定範囲内の値およびセンサ故障判定範囲内の値に所定パターンで変化させても良い。この場合、ブレーキECU1のセンサ2〜6に係る故障検出部において上記所定パターン通りにセンサ2〜6に係る故障の有無が判定されなかった場合に、ブレーキECU1のセンサ2〜6に係る故障検出部が故障していることを判定する。
【0078】
また、上記実施形態において、「同一信号」はブレーキECU1の故障判定の精度が許す限り厳密に同位相の信号でなくても良いし、「反転信号」はブレーキECU1の故障判定の精度が許す限り逆位相の信号でなくても良い。
【符号の説明】
【0079】
1…ブレーキECU、1c…CPU、2…ストロークセンサ、3…圧力センサ、4…負圧センサ、5…ヨーレートセンサ、6…Gセンサ、7…メータ、8…アクチュエータ、11、12…第1、第2センサ部、13…テスト信号発生器、14、19、21…タイマー、15、16…ミキシング部、17…NOT回路、20、22…スイッチ
【特許請求の範囲】
【請求項1】
同一物理量に対して同一信号または反転信号をセンサ信号として出力する2つのセンサ素子(11、12)がそれぞれに当該センサ素子に対応する信号線によって接続され、当該信号線によって電送される信号の信号値を加算または減算して加算値または減算値を演算する演算部(1c)と、
前記演算部(1c)により演算されている加算値または減算値が所定範囲外の値である場合に前記2つのセンサ素子のいずれかが故障していることを検出する第1故障検出部(145、245)とを備えた制御装置において、
前記2つのセンサ素子に対応する2つの前記信号線のいずれかに設けられ、前記加算値または前記減算値が前記2つのセンサ素子のいずれかの故障を示す値となるように、前記2つの信号線によって電送される信号のいずれかを変化させる信号変化部(13〜22)と、
前記信号変化部により、前記2つの信号線によって電送される信号を、前記加算値または前記減算値が前記2つのセンサ素子の故障を示す値となるように変化させている状態で、前記第1故障検出により前記2つのセンサ素子が正常であることが検出されている場合に、前記第1故障検出部が故障していることを検出する第2故障検出部(120、220)と、を備えていることを特徴とする制御装置。
【請求項2】
前記2つのセンサ素子は、同一物理量に対して反転信号をセンサ信号として出力するものであり、
前記信号変化部は、前記2つのセンサ素子に対応する前記2つの信号線のいずれにも設けられ、前記2つのセンサ素子の出力するセンサ信号に対して同一のテスト信号を重畳して前記2つの信号線によって電送される2つの信号を変化させ、
前記演算手段は、前記2つの信号線によって電送される信号の信号値を加算して加算値を演算し、
前記第1故障検出部は、前記演算部により演算されている加算値が所定範囲外の値である場合に前記2つのセンサ素子のいずれかが故障していることを検出し、
前記2つの信号線によって電送される信号の信号値を減算して前記物理量に相関する値を生成するセンサ値生成手段(130、155)を備えていることを特徴とする請求項1に記載の制御装置。
【請求項3】
前記2つのセンサ素子は、同一物理量に対して同一信号をセンサ信号として出力するものであり、
前記信号変化部は、前記2つのセンサ素子に対応する前記2つの信号線のいずれにも設けられ、前記2つのセンサ素子の出力するセンサ信号に対して互いに反転したテスト信号を重畳して前記2つの信号線によって電送される2つの信号を変化させ、
前記演算手段は、前記2つの信号線によって電送される信号の信号値を減算して減算値を演算し、
前記第1故障検出部は、前記演算部により演算されている減算値が所定範囲外の値である場合に前記2つのセンサ素子のいずれかが故障していることを検出し、
前記2つの信号線によって電送される信号の信号値を加算して前記物理量に相関する値を生成するセンサ値生成手段(230、255)を備えていることを特徴とする請求項1に記載の制御装置。
【請求項4】
前記信号変化部は、2つのセンサ素子に対応する信号線のいずれか一方に設けられていることを特徴とする請求項1に記載の制御装置。
【請求項1】
同一物理量に対して同一信号または反転信号をセンサ信号として出力する2つのセンサ素子(11、12)がそれぞれに当該センサ素子に対応する信号線によって接続され、当該信号線によって電送される信号の信号値を加算または減算して加算値または減算値を演算する演算部(1c)と、
前記演算部(1c)により演算されている加算値または減算値が所定範囲外の値である場合に前記2つのセンサ素子のいずれかが故障していることを検出する第1故障検出部(145、245)とを備えた制御装置において、
前記2つのセンサ素子に対応する2つの前記信号線のいずれかに設けられ、前記加算値または前記減算値が前記2つのセンサ素子のいずれかの故障を示す値となるように、前記2つの信号線によって電送される信号のいずれかを変化させる信号変化部(13〜22)と、
前記信号変化部により、前記2つの信号線によって電送される信号を、前記加算値または前記減算値が前記2つのセンサ素子の故障を示す値となるように変化させている状態で、前記第1故障検出により前記2つのセンサ素子が正常であることが検出されている場合に、前記第1故障検出部が故障していることを検出する第2故障検出部(120、220)と、を備えていることを特徴とする制御装置。
【請求項2】
前記2つのセンサ素子は、同一物理量に対して反転信号をセンサ信号として出力するものであり、
前記信号変化部は、前記2つのセンサ素子に対応する前記2つの信号線のいずれにも設けられ、前記2つのセンサ素子の出力するセンサ信号に対して同一のテスト信号を重畳して前記2つの信号線によって電送される2つの信号を変化させ、
前記演算手段は、前記2つの信号線によって電送される信号の信号値を加算して加算値を演算し、
前記第1故障検出部は、前記演算部により演算されている加算値が所定範囲外の値である場合に前記2つのセンサ素子のいずれかが故障していることを検出し、
前記2つの信号線によって電送される信号の信号値を減算して前記物理量に相関する値を生成するセンサ値生成手段(130、155)を備えていることを特徴とする請求項1に記載の制御装置。
【請求項3】
前記2つのセンサ素子は、同一物理量に対して同一信号をセンサ信号として出力するものであり、
前記信号変化部は、前記2つのセンサ素子に対応する前記2つの信号線のいずれにも設けられ、前記2つのセンサ素子の出力するセンサ信号に対して互いに反転したテスト信号を重畳して前記2つの信号線によって電送される2つの信号を変化させ、
前記演算手段は、前記2つの信号線によって電送される信号の信号値を減算して減算値を演算し、
前記第1故障検出部は、前記演算部により演算されている減算値が所定範囲外の値である場合に前記2つのセンサ素子のいずれかが故障していることを検出し、
前記2つの信号線によって電送される信号の信号値を加算して前記物理量に相関する値を生成するセンサ値生成手段(230、255)を備えていることを特徴とする請求項1に記載の制御装置。
【請求項4】
前記信号変化部は、2つのセンサ素子に対応する信号線のいずれか一方に設けられていることを特徴とする請求項1に記載の制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2013−113624(P2013−113624A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−257903(P2011−257903)
【出願日】平成23年11月25日(2011.11.25)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月25日(2011.11.25)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【Fターム(参考)】
[ Back to top ]