
センサ異常診断装置及びセンサシステム
【課題】作業者がセンサ設置現場におもむくことなく、傾斜センサの異常を判定する。
【解決手段】傾斜センサ10が出力する傾斜角と、自己診断部23によって正常に動作していることが診断されている加速度センサ20が出力する加速度とを用いて、判定部32が傾斜角と加速度の比に基づいて傾斜センサ10に異常が生じたことを判定する。
【解決手段】傾斜センサ10が出力する傾斜角と、自己診断部23によって正常に動作していることが診断されている加速度センサ20が出力する加速度とを用いて、判定部32が傾斜角と加速度の比に基づいて傾斜センサ10に異常が生じたことを判定する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、センサの異常を診断するセンサ異常診断装置、及び自己診断用のセンサ異常診断機能を有するセンサシステムに関するものである。
【背景技術】
【0002】
従来、構造物にセンサを設置して微動観測を行い、構造物の安全性や健全性を診断している(例えば、特許文献1参照)。例えば橋梁の健全度を評価する場合、橋脚に加速度センサを設置して、列車、自動車の交通による振動、地震による振動、河川の水流による振動等に起因する橋脚の振動を観測すると共に、傾斜センサを設置してその傾斜を観測する。
【0003】
構造物の健全性診断の前提としてセンサ類の計測値が正常であることを確認する必要がある。そこで、特許文献2では、振子の変位量を検出して加速度に換算する振子式の加速度センサについて、その自己診断方法が提案されている。この方法では、加速度センサが、振子に駆動力を与える自己診断用の駆動部を備え、この駆動部が振子に駆動力を与えてもその変位量が検出できないときに該センサが異常であると判定する。
これに対して傾斜センサは自己診断方法がなく、傾斜センサの計測値が正常であることの確認を行うためには、センサ設置現場で実際に傾けて診断を行う必要があった。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−257671号公報
【特許文献2】特開2005−300231号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来の傾斜センサの診断は作業者が現場で行う必要があるので、センサ点検から次の点検までの間に故障が発生して計測値に異常が生じても、計測値が固定値の場合にはその固定値がセンサ異常による異常値なのか、又は実際に構造物が傾斜している真値なのか判定することが難しく、センサ異常を検知することができないという課題があった。傾斜センサの異常を検知できなければ、実際に構造物が傾いて危険な状態となっていても、その危険を検出できなくなるおそれがある。
【0006】
この発明は、上記のような課題を解決するためになされたもので、作業者がセンサ設置現場におもむかなくとも傾斜センサの異常を判定することを可能としたセンサ異常診断装置及びセンサシステムを提供することを目的とする。
【課題を解決するための手段】
【0007】
請求項1の発明に係るセンサ異常診断装置は、構造物に設置された第1のセンサが計測する第1の物理量と、第1のセンサと異なる物理量を測定する目的で設置されたものであって、構造物に設置された第2のセンサが計測する第2の物理量とを用いて、第1の物理量と第2の物理量とを比較し、当該比較の結果に基づいて第1のセンサ又は第2のセンサに異常が生じたことを判定する判定部とを備えるようにしたものである。
【0008】
請求項2の発明に係るセンサ異常診断装置は、判定部が、所定期間における第1の物理量の最大値と第2の物理量の最大値の比が所定の判定範囲内を超えると、第1のセンサ又は第2のセンサに異常が生じたと判定するようにしたものである。
【0009】
請求項3の発明に係るセンサ異常診断装置は、判定部が、所定期間、同一周波数における第1の物理量のスペクトルと第2の物理量のスペクトルの比が所定の判定範囲内を超えると、第1のセンサ又は第2のセンサに異常が生じたと判定するようにしたものである。
【0010】
請求項4の発明に係るセンサ異常診断装置は、第2のセンサを加速度センサにし、判定部が、所定期間における加速度から求めた特定固有周期の最大速度応答と、第1の物理量から求めた同一固有周期の最大速度応答に対応する値との比が所定の判定範囲内を超えると、第1のセンサ又は加速度センサに異常が生じたと判定するようにしたものである。
【0011】
請求項5の発明に係るセンサ異常診断装置は、第1のセンサを傾斜センサ、第2のセンサを加速度センサにしたものである。
【0012】
請求項6の発明に係るセンサ異常診断装置は、加速度センサは内部に自己診断機能を有し、判定部は、傾斜センサが計測する傾斜角と、加速度センサが計測する自己診断された加速度とを用いて、傾斜センサに異常が生じたことを判定するようにしたものである。
【0013】
請求項7の発明に係るセンサシステムは、内部に自己診断機能を有する加速度センサと、傾斜角を計測する傾斜センサと、傾斜センサが計測する傾斜角と、加速度センサが計測する自己診断された加速度とを比較し、当該比較の結果に基づいて傾斜センサに異常が生じたことを判定する判定部とを備えるようにしたものである。
【発明の効果】
【0014】
請求項1〜3の発明によれば、第1の物理量と第2の物理量とを比較し、比較の結果に基づいて第1のセンサ又は第2のセンサに異常が生じたことを判定するようにしたので、作業者がセンサ設置現場におもむかなくともセンサの異常を判定することができる。
【0015】
請求項4の発明によれば、両センサにおいて同一の固有周期における最大速度応答を比較するようにしたので、ある程度の幅を持った周波数特性の比較を行うことができ、異常診断の安定性を向上させることができる。
【0016】
請求項5の発明によれば、第1のセンサを傾斜センサ、第2のセンサを加速度センサにしたので、従来から橋梁等に用いられていたセンサ類を用いて傾斜角と加速度を測定、比較することにより傾斜センサ又は加速度センサに異常が生じたことを判定することができる。
【0017】
請求項6の発明によれば、傾斜センサが計測する傾斜角と、加速度センサが計測する自己診断された加速度とを用いるようにしたので、傾斜センサに異常が生じたことを判定することができる。
【0018】
請求項7の発明によれば、内部に自己診断機能を有する加速度検出部と、傾斜角を計測する傾斜検出部と、傾斜検出部が計測する傾斜角と加速度検出部が計測する自己診断された加速度とを比較する判定部とを備える傾斜センサとしたので、傾斜検出部に異常が生じたことを自己診断可能な傾斜センサとすることができる。
【図面の簡単な説明】
【0019】
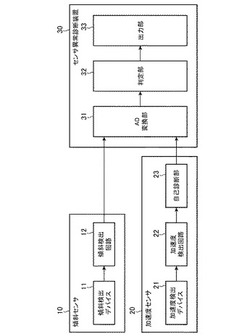
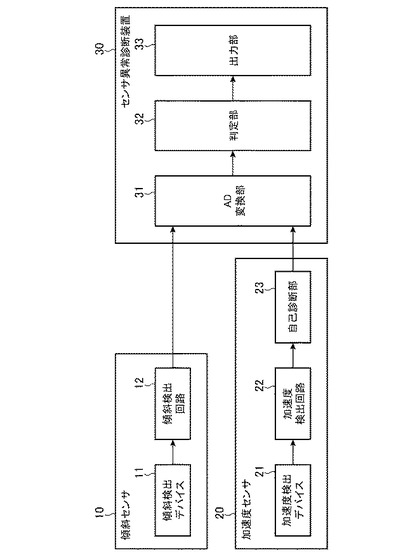
【図1】この発明の実施の形態1に係るセンサ異常診断装置の構成を示すブロック図である。
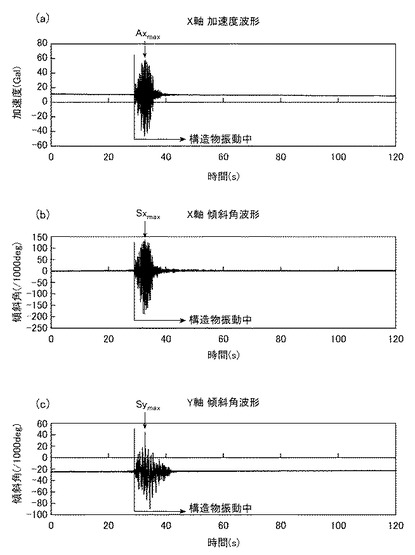
【図2】実施の形態1に係るセンサ異常診断装置の計測値の一例を示すグラフであり、加速度(X軸)を図2(a)に、傾斜角(X軸)を図2(b)に、傾斜角(Y軸)を図2(c)に示す。
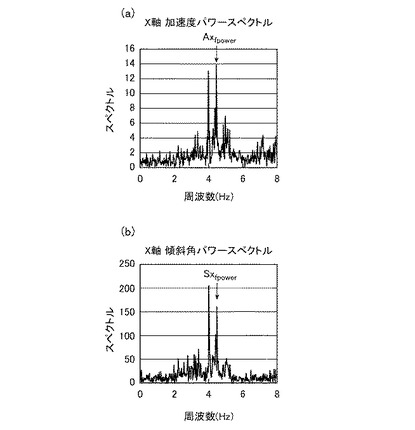
【図3】図2に示す計測値をFFT処理したパワースペクトルのグラフであり、加速度(X軸)のパワースペクトルを図3(a)に、傾斜角(X軸)のパワースペクトルを図3(b)に示す。
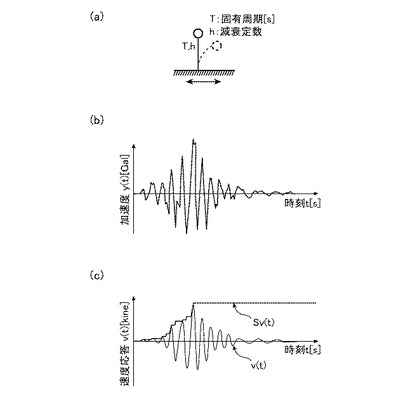
【図4】実施の形態1に係るセンサ異常診断装置の最大速度応答算出方法を説明する図であり、図4(a)に物理モデルを、図4(b)に加速度のグラフを、図4(c)に速度応答とその最大速度応答のグラフを示す。
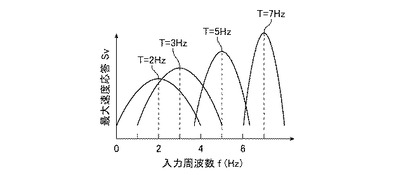
【図5】複数の固有周期における正弦波入力時の各最大速度応答を示すグラフである。
【発明を実施するための形態】
【0020】
実施の形態1.
図1は、この発明の実施の形態1に係るセンサ異常診断装置30の構成を示すブロック図である。図に示すセンサ異常診断装置30は、傾斜角(第1の物理量)を検出する傾斜センサ(第1のセンサ)10と、加速度(第2の物理量)を検出する加速度センサ(第2のセンサ)20とを接続して、各センサ10,20の計測値をアナログ/デジタル変換するAD変換部31と、傾斜角と加速度を用いて傾斜センサ10の異常を判定する判定部32と、異常判定結果を通信回線等を介して外部出力する出力部33とを備える。
【0021】
本実施の形態1では、傾斜センサ10として電位差式の傾斜センサを用いる。この傾斜センサ10は、密閉容器内に電解液を封入して形成された気泡の位置を電極間の電位差として出力する傾斜検出デバイス11と、電極間の電位差の比を傾斜角のアナログ信号として出力する傾斜検出回路12とからなる。
【0022】
また、本実施の形態1では、加速度センサ20として、先立って説明した自己診断可能な振子式の加速度センサを用いる。この加速度センサ20は、振子の変位量を出力する傾斜検出回路12と、この変位量を加速度のアナログ信号として出力する加速度検出回路22と、加速度検出デバイス21の異常を判定する自己診断部23とからなる。この自己診断部23は、例えば特許文献2に記載されているような自己診断用の駆動部を備えて、この駆動部が振子に駆動力を与えてもその変位量が検出できないときに加速度検出デバイス21又は加速度検出回路22に異常が発生していると判定し、それ以外の場合には計測値は正常であると判定する。加速度センサ20が自己診断部23を備えているため、以下では加速度センサ20が出力する計測値を正常な値とみなす。
【0023】
センサ異常診断装置30内部のAD変換部31は、傾斜センサ10及び加速度センサ20から出力される計測値のアナログ信号をアナログ/デジタル変換して、傾斜角及び加速度のデジタル信号を出力する。なお、図1のように傾斜センサ10と加速度センサ20が1つのAD変換部31を兼用してもよいし、傾斜センサ10と加速度センサ20がそれぞれAD変換部31を備えるようにしてもよい。
【0024】
判定部32は、AD変換部31から出力される自己診断部23で正常に計測が行われていることを確認された加速度の計測値を用いて、傾斜センサ10の異常を判定する。本実施の形態1では、異常判定方法の例として(1)出力最大値比較、(2)パワースペクトル比較の2例を説明する。
【0025】
(1)出力最大値比較
図2は、計測値の一例を示すグラフであり、加速度センサ20の加速度(X軸)を図2(a)に、傾斜センサ10の傾斜角(X軸)を図2(b)に、傾斜角(Y軸)を図2(c)に示す。図2(a)は縦軸に加速度、横軸に時間を示す。また、図2(b),(c)は縦軸に傾斜角、横軸に時間を示す。なお、図2(a)〜(c)において横軸の時間は同一時刻である。ここでは、加速度が所定閾値を超えると「構造物振動中」とみなし、所定閾値を超えた構造物振動開始時点から所定期間(例えば120秒)の加速度及び傾斜角の計測値を異常判定のために用いる。
【0026】
判定部32は、構造物振動中の加速度センサ20のX軸の出力最大値をAxmax、傾斜センサ10のX軸の出力最大値をSxmaxとして、出力最大値の比Sxmax/Axmaxを算出する。加速度センサ20の計測値は正常とみなすことができるため、もう一方の傾斜センサ10の計測値も正常であれば出力最大値の比Sxmax/Axmaxも所定範囲内となる。そこで、判定部32は、期待値で正規化した正常値の比に対して、出力最大値の比Sxmax/Axmaxが所定の判定範囲(例えば±20%)を超えた場合に、傾斜センサ10の計測値が異常値であると判定し、さらに傾斜検出デバイス11又は傾斜検出回路12に異常が発生しているものと判定する。ここで、1回の異常判定のみでセンサの正常/異常を判断するのではなく、例えば異常値であるという判定部32の判定が所定回数(例えば10回)連続したとき、あるいは累積したときにはじめて傾斜検出デバイス11又は傾斜検出回路12に異常が生じているとする発報(詳細は後述)を行うよう構成してもよい。なお、判定範囲の値は適宜設定すればよい。
【0027】
なお、傾斜センサ10が2軸以上の傾斜角を検出している場合には、判定部32は各軸の出力最大値を利用して異常を判定してもよい。傾斜センサ10が図2(c)に示すようなY軸の傾斜角も検出しているなら、判定部32がこのY軸の出力最大値Symaxを用いて出力最大値の比Symax/Axmaxを算出し、所定の判定範囲と比較する。なお、判定範囲の値は、比算出に用いる軸に応じて適宜変更すればよい。
同様に、加速度センサ20が2軸以上の加速度を検出しているなら、判定部32は傾斜センサ10の任意の軸と加速度センサ20の任意の軸の出力最大値を利用して異常判定することもできる。
【0028】
(2)パワースペクトル比較
判定部32は、構造物振動中の加速度センサ20のX軸の加速度波形をFFT(Fast Fourier Transform)処理して、特定周波数(例えば5Hz)のパワースペクトルをAxfpowerとする。同様に、判定部32は、構造物振動中の傾斜センサ10のX軸の傾斜角波形をFFT処理して、同一の特定周波数(例えば5Hz)のパワースペクトルをSxfpowerとする。加速度センサ20の計測値は正常とみなすことができるため、もう一方の傾斜センサ10の計測値も正常であればパワースペクトルの比Sxfpower/Axfpowerも所定範囲内となる。そこで、判定部32は、期待値で正規化した正常値の比に対して、パワースペクトルの比Sxfpower/Axfpowerが所定の判定範囲(例えば±20%)を超えた場合に、傾斜センサ10の計測値が異常値であると判定し、さらに傾斜検出デバイス11又は傾斜検出回路12に異常が発生しているものと判定する。
【0029】
なお、特定周波数及び判定範囲の値は適宜設定すればよい。ただし、特定周波数については、サンプリングの周期を考慮して決定することが好ましい。例えばサンプリングが毎秒1回(1Hz)で行われていた場合、上記特定周波数(5Hz)の値は±1Hzの範囲で誤差を含むこととなるため、4〜6Hzの範囲における適宜な値を設定する、あるいは4〜6Hzの範囲におけるパワースペクトルの最大値を上記Sxfpower,Axfpowerとすることが考えられる。
【0030】
図3は、図2に示す計測値をFFT処理したパワースペクトルのグラフであり、加速度センサ20の加速度(X軸)のパワースペクトルを図3(a)に、傾斜センサ10の傾斜角(X軸)のパワースペクトルを図3(b)に示す。図3の例のようにピークが複数ある場合、判定部32は、加速度のパワースペクトルのうちの最大ピークを示す周波数(図3(a)では4.5Hz)を特定周波数に設定し、この4.5Hzにおけるパワースペクトルの比Sxfpower/Axfpowerを用いて傾斜センサ10の異常判定を行ってもよい。
【0031】
なお、傾斜センサ10が2軸以上の傾斜角を検出している場合には、上記(1)の異常判定方法と同様に、判定部32は、各軸のパワースペクトルを利用して異常を判定してもよい。さらに、傾斜センサ10及び加速度センサ20がそれぞれ2軸以上の計測値を検出している場合には、上記(1)の異常判定方法と同様に、判定部32は、傾斜センサ10の任意の軸と加速度センサ20の任意の軸のパワースペクトルを利用して異常判定することもできる。
【0032】
(3)最大速度応答比較
図4(a)は、構造物を単純化した、1質点減衰系の物理モデルを示す説明図である。図において、構造物は、運動方向は矢印で示す1方向で固有周期Tも1つだけとしたとき、減衰定数hで振動するおもりで模擬した1自由度1質点減衰系で表現できる。この固有周期Tの物理モデルを用いて、地盤の加速度y(t)の入力に対する固有周期Tの速度応答v(t)を求め、さらに、固有周期Tの速度応答v(t)の最大値Svを求めることができる。
最大速度応答Svの算出方法は、例えば「インテリジェント地震センサの開発、古川ら、Savemation Review、株式会社山武、1999年8月」に記載された既知の方法を用いればよいため、ここでの詳細な説明は省略する。
地盤の加速度y(t)の一例を図4(b)に示し、この入力に対する固有周期Tの速度応答v(t)とその最大速度応答Svのグラフを図4(c)に示す。また、図5は、固有周期T(ここでは周波数で表す)=2,3,5,7Hzの各物理モデルに入力周波数fの加速度(正弦波を仮定)を入力した場合の各最大速度応答Svを示すグラフである。
【0033】
判定部32は、構造物振動中の加速度センサ20のX軸の出力波形から、所定の固有周期Tにおける速度応答v(t)を求め、最大値を最大速度応答AxSvとする。このとき用いた所定の固有周期Tを特定固有周期とする。同様に、判定部32は、構造物振動中の傾斜センサ10のX軸の出力波形から、特定固有周期と同一の値である固有周期T(即ち、同一固有周期)の速度応答v(t)を求め、その最大値を最大速度応答SxSv(最大速度応答に対応する値)とする。加速度センサ20の計測値は正常とみなすことができるため、もう一方の傾斜センサ10の計測値も正常であれば最大速度応答の比SxSv/AxSvも所定の判定範囲内となる。そこで、判定部32は、入力周波数f(例えば5Hz)における最大速度応答の比SxSv/AxSvが所定範囲(例えば±20%)を超えた場合に、傾斜センサ10の計測値が異常値であると判定し、さらに傾斜検出デバイス11又は傾斜検出回路12に異常が発生しているものと判定する。
ただし、一般に傾斜センサ10よりも加速度センサ20の測定精度が高いため、加速度センサ20の出力波形が小さい値の場合にはそもそも異常判定を行わない構成にして、誤判定を防止するようにしてもよい。
【0034】
なお、特定固有周期T、入力周波数f及び判定範囲の値は適宜設定すればよい。特に特定固有周期Tを定めるにあたっては、構造物の構造及び材質等によって適切な固有周期が異なることから、図5に例示したように入力周波数と最大速度応答との関係が顕著となる周期を実験的に求めたうえで決定することが望ましい。また、入力周波数fを複数設定してもよく、例えばf=1,3,5,7,10Hzにおける最大速度応答AxSv,SxSvの比をそれぞれ求め、各入力周波数fにおける最大速度応答の比AxSv/SxSvがそれぞれ判定範囲内であれば、傾斜センサ10の計測値は正常であると判定するようにしてもよい。
【0035】
なお、傾斜センサ10が2軸以上の傾斜角を検出している場合には、上記(1),(2)の異常判定方法と同様に、判定部32は、各軸の最大速度応答を利用して異常を判定してもよい。さらに、傾斜センサ10及び加速度センサ20がそれぞれ2軸以上の計測値を検出している場合には、上記(1),(2)の異常判定方法と同様に、判定部32は、傾斜センサ10の任意の軸と加速度センサ20の任意の軸の最大速度応答を利用して異常判定することもできる。
【0036】
上記(1)の最大値比較では計測値の周波数を考慮せずに時間軸上の最大値を比較し、また、上記(2)のパワースペクトル比較では1つの特定周波数におけるスペクトルを比較する。これに対して、上記(3)の最大速度応答比較では、図5に示すように、固有周期Tの速度応答vが、最大速度応答Svを頂点にして両側にある程度の幅を持つグラフになるため、最大速度応答SxSv,AxSvの比較も、ある程度の幅を持った周波数特性の比較となる。従って、加速度と傾斜角の計測値の周波数のずれを吸収してロバストな比較が可能となり、異常診断の安定性を高めることができる。また、上記(2)に比べ、上記(3)の場合の演算負荷が少ない。
【0037】
なお、上記(1)〜(3)の異常判定方法では、加速度センサ20が正常値を出力していることを前提にして傾斜センサ10の異常判定を実施する構成としたが、加速度センサ20に自己診断部23がない場合には加速度が正常値とは限らないため、傾斜センサ10と加速度センサ20のどちらに異常が発生しているか特定することができない。その場合には、判定部32において、出力最大値の比、パワースペクトルの比、又は最大速度応答の比が所定の判定範囲を超えると、傾斜センサ10又は加速度センサ20に異常が発生しているものと判定するようにすればよい。
ただし、加速度センサ20に自己診断部23がない場合であっても、傾斜角と加速度の計測値が複数軸分あれば、任意の軸の傾斜角と任意の軸の加速度を組み合わせた比同士を比較して異常な値を示す軸を特定し、どちらのセンサに異常が発生しているかを判定することも可能となる。
【0038】
センサ異常診断装置30において、異常判定が所定条件(例えば、上述のように異常判定が10回連続した場合)を満たすとき、異常判定結果を出力部33からネットワーク経由でホストコンピュータ(例えば遠隔にある社屋内のコンピュータ)に送信(発報)すれば、管理者は当該送信されたデータを確認することで異常判定結果を知ることができる。
【0039】
図1に示すセンサ異常診断装置30をコンピュータで構成する場合には、判定部32の処理内容を記述している異常判定プログラムをコンピュータのメモリに格納し、傾斜センサ10及び加速度センサ20の計測値を入力データに用いて、コンピュータのCPUがメモリに格納されている異常判定プログラムを実行する。
【0040】
以上より、実施の形態1によれば、傾斜センサ10が出力する傾斜角と、自己診断部23によって正常に動作していることが診断されている加速度センサ20が出力する加速度とを用いて、判定部32がこれら傾斜角と加速度の比に基づいて傾斜センサ10に異常が生じたことを判定するように構成した。このため、作業者がセンサ設置現場におもむかなくとも傾斜センサ10の異常を判定することができる。
【0041】
また、自己診断部23を有さない加速度センサ20を用いた場合でも、判定部32は傾斜センサ10又は加速度センサ20に異常が発生していることを判定することができる。この構成の場合には、加速度センサ20として自己診断機能を有さない安価な加速度センサを用いることができ、また、作業者がセンサ設置現場におもむかなくとも傾斜センサ10に異常が発生している可能性を判定することができる。
【0042】
なお、上記実施の形態1では、傾斜センサ10及び加速度センサ20を、センサ異常診断装置30とは別体に構成したが、これらを一体に構成して判定部32の自己診断機能を有するセンサシステムにしてもよい。
【0043】
また、上記実施の形態1では、橋梁の健全度評価に用いられる傾斜センサと加速度センサの組み合わせを例に挙げて、自己診断機能を有する一方のセンサの計測値を利用して自己診断機能のない他方のセンサの異常を判定する方法を説明したが、センサの組み合わせはこれに限定されるものではなく、加速度センサ20に代えて角速度センサ、速度センサ、変位センサ等、種々のセンサを利用する構成にしてもよい。あるいは、加速度センサに代えて、傾斜センサ10が測定する傾斜方向(例えばX軸方向の傾斜を測定するよう傾斜センサ10を設置する)とは異なる方向(例えばY軸方向)の傾斜を測定する傾斜センサを別途設けるようにしてもよい。
【符号の説明】
【0044】
10 傾斜センサ
11 傾斜検出デバイス
12 傾斜検出回路
20 加速度センサ
21 加速度検出デバイス
22 加速度検出回路
23 自己診断部
30 センサ異常診断装置
31 AD変換部
32 判定部
33 出力部
【技術分野】
【0001】
この発明は、センサの異常を診断するセンサ異常診断装置、及び自己診断用のセンサ異常診断機能を有するセンサシステムに関するものである。
【背景技術】
【0002】
従来、構造物にセンサを設置して微動観測を行い、構造物の安全性や健全性を診断している(例えば、特許文献1参照)。例えば橋梁の健全度を評価する場合、橋脚に加速度センサを設置して、列車、自動車の交通による振動、地震による振動、河川の水流による振動等に起因する橋脚の振動を観測すると共に、傾斜センサを設置してその傾斜を観測する。
【0003】
構造物の健全性診断の前提としてセンサ類の計測値が正常であることを確認する必要がある。そこで、特許文献2では、振子の変位量を検出して加速度に換算する振子式の加速度センサについて、その自己診断方法が提案されている。この方法では、加速度センサが、振子に駆動力を与える自己診断用の駆動部を備え、この駆動部が振子に駆動力を与えてもその変位量が検出できないときに該センサが異常であると判定する。
これに対して傾斜センサは自己診断方法がなく、傾斜センサの計測値が正常であることの確認を行うためには、センサ設置現場で実際に傾けて診断を行う必要があった。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−257671号公報
【特許文献2】特開2005−300231号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来の傾斜センサの診断は作業者が現場で行う必要があるので、センサ点検から次の点検までの間に故障が発生して計測値に異常が生じても、計測値が固定値の場合にはその固定値がセンサ異常による異常値なのか、又は実際に構造物が傾斜している真値なのか判定することが難しく、センサ異常を検知することができないという課題があった。傾斜センサの異常を検知できなければ、実際に構造物が傾いて危険な状態となっていても、その危険を検出できなくなるおそれがある。
【0006】
この発明は、上記のような課題を解決するためになされたもので、作業者がセンサ設置現場におもむかなくとも傾斜センサの異常を判定することを可能としたセンサ異常診断装置及びセンサシステムを提供することを目的とする。
【課題を解決するための手段】
【0007】
請求項1の発明に係るセンサ異常診断装置は、構造物に設置された第1のセンサが計測する第1の物理量と、第1のセンサと異なる物理量を測定する目的で設置されたものであって、構造物に設置された第2のセンサが計測する第2の物理量とを用いて、第1の物理量と第2の物理量とを比較し、当該比較の結果に基づいて第1のセンサ又は第2のセンサに異常が生じたことを判定する判定部とを備えるようにしたものである。
【0008】
請求項2の発明に係るセンサ異常診断装置は、判定部が、所定期間における第1の物理量の最大値と第2の物理量の最大値の比が所定の判定範囲内を超えると、第1のセンサ又は第2のセンサに異常が生じたと判定するようにしたものである。
【0009】
請求項3の発明に係るセンサ異常診断装置は、判定部が、所定期間、同一周波数における第1の物理量のスペクトルと第2の物理量のスペクトルの比が所定の判定範囲内を超えると、第1のセンサ又は第2のセンサに異常が生じたと判定するようにしたものである。
【0010】
請求項4の発明に係るセンサ異常診断装置は、第2のセンサを加速度センサにし、判定部が、所定期間における加速度から求めた特定固有周期の最大速度応答と、第1の物理量から求めた同一固有周期の最大速度応答に対応する値との比が所定の判定範囲内を超えると、第1のセンサ又は加速度センサに異常が生じたと判定するようにしたものである。
【0011】
請求項5の発明に係るセンサ異常診断装置は、第1のセンサを傾斜センサ、第2のセンサを加速度センサにしたものである。
【0012】
請求項6の発明に係るセンサ異常診断装置は、加速度センサは内部に自己診断機能を有し、判定部は、傾斜センサが計測する傾斜角と、加速度センサが計測する自己診断された加速度とを用いて、傾斜センサに異常が生じたことを判定するようにしたものである。
【0013】
請求項7の発明に係るセンサシステムは、内部に自己診断機能を有する加速度センサと、傾斜角を計測する傾斜センサと、傾斜センサが計測する傾斜角と、加速度センサが計測する自己診断された加速度とを比較し、当該比較の結果に基づいて傾斜センサに異常が生じたことを判定する判定部とを備えるようにしたものである。
【発明の効果】
【0014】
請求項1〜3の発明によれば、第1の物理量と第2の物理量とを比較し、比較の結果に基づいて第1のセンサ又は第2のセンサに異常が生じたことを判定するようにしたので、作業者がセンサ設置現場におもむかなくともセンサの異常を判定することができる。
【0015】
請求項4の発明によれば、両センサにおいて同一の固有周期における最大速度応答を比較するようにしたので、ある程度の幅を持った周波数特性の比較を行うことができ、異常診断の安定性を向上させることができる。
【0016】
請求項5の発明によれば、第1のセンサを傾斜センサ、第2のセンサを加速度センサにしたので、従来から橋梁等に用いられていたセンサ類を用いて傾斜角と加速度を測定、比較することにより傾斜センサ又は加速度センサに異常が生じたことを判定することができる。
【0017】
請求項6の発明によれば、傾斜センサが計測する傾斜角と、加速度センサが計測する自己診断された加速度とを用いるようにしたので、傾斜センサに異常が生じたことを判定することができる。
【0018】
請求項7の発明によれば、内部に自己診断機能を有する加速度検出部と、傾斜角を計測する傾斜検出部と、傾斜検出部が計測する傾斜角と加速度検出部が計測する自己診断された加速度とを比較する判定部とを備える傾斜センサとしたので、傾斜検出部に異常が生じたことを自己診断可能な傾斜センサとすることができる。
【図面の簡単な説明】
【0019】
【図1】この発明の実施の形態1に係るセンサ異常診断装置の構成を示すブロック図である。
【図2】実施の形態1に係るセンサ異常診断装置の計測値の一例を示すグラフであり、加速度(X軸)を図2(a)に、傾斜角(X軸)を図2(b)に、傾斜角(Y軸)を図2(c)に示す。
【図3】図2に示す計測値をFFT処理したパワースペクトルのグラフであり、加速度(X軸)のパワースペクトルを図3(a)に、傾斜角(X軸)のパワースペクトルを図3(b)に示す。
【図4】実施の形態1に係るセンサ異常診断装置の最大速度応答算出方法を説明する図であり、図4(a)に物理モデルを、図4(b)に加速度のグラフを、図4(c)に速度応答とその最大速度応答のグラフを示す。
【図5】複数の固有周期における正弦波入力時の各最大速度応答を示すグラフである。
【発明を実施するための形態】
【0020】
実施の形態1.
図1は、この発明の実施の形態1に係るセンサ異常診断装置30の構成を示すブロック図である。図に示すセンサ異常診断装置30は、傾斜角(第1の物理量)を検出する傾斜センサ(第1のセンサ)10と、加速度(第2の物理量)を検出する加速度センサ(第2のセンサ)20とを接続して、各センサ10,20の計測値をアナログ/デジタル変換するAD変換部31と、傾斜角と加速度を用いて傾斜センサ10の異常を判定する判定部32と、異常判定結果を通信回線等を介して外部出力する出力部33とを備える。
【0021】
本実施の形態1では、傾斜センサ10として電位差式の傾斜センサを用いる。この傾斜センサ10は、密閉容器内に電解液を封入して形成された気泡の位置を電極間の電位差として出力する傾斜検出デバイス11と、電極間の電位差の比を傾斜角のアナログ信号として出力する傾斜検出回路12とからなる。
【0022】
また、本実施の形態1では、加速度センサ20として、先立って説明した自己診断可能な振子式の加速度センサを用いる。この加速度センサ20は、振子の変位量を出力する傾斜検出回路12と、この変位量を加速度のアナログ信号として出力する加速度検出回路22と、加速度検出デバイス21の異常を判定する自己診断部23とからなる。この自己診断部23は、例えば特許文献2に記載されているような自己診断用の駆動部を備えて、この駆動部が振子に駆動力を与えてもその変位量が検出できないときに加速度検出デバイス21又は加速度検出回路22に異常が発生していると判定し、それ以外の場合には計測値は正常であると判定する。加速度センサ20が自己診断部23を備えているため、以下では加速度センサ20が出力する計測値を正常な値とみなす。
【0023】
センサ異常診断装置30内部のAD変換部31は、傾斜センサ10及び加速度センサ20から出力される計測値のアナログ信号をアナログ/デジタル変換して、傾斜角及び加速度のデジタル信号を出力する。なお、図1のように傾斜センサ10と加速度センサ20が1つのAD変換部31を兼用してもよいし、傾斜センサ10と加速度センサ20がそれぞれAD変換部31を備えるようにしてもよい。
【0024】
判定部32は、AD変換部31から出力される自己診断部23で正常に計測が行われていることを確認された加速度の計測値を用いて、傾斜センサ10の異常を判定する。本実施の形態1では、異常判定方法の例として(1)出力最大値比較、(2)パワースペクトル比較の2例を説明する。
【0025】
(1)出力最大値比較
図2は、計測値の一例を示すグラフであり、加速度センサ20の加速度(X軸)を図2(a)に、傾斜センサ10の傾斜角(X軸)を図2(b)に、傾斜角(Y軸)を図2(c)に示す。図2(a)は縦軸に加速度、横軸に時間を示す。また、図2(b),(c)は縦軸に傾斜角、横軸に時間を示す。なお、図2(a)〜(c)において横軸の時間は同一時刻である。ここでは、加速度が所定閾値を超えると「構造物振動中」とみなし、所定閾値を超えた構造物振動開始時点から所定期間(例えば120秒)の加速度及び傾斜角の計測値を異常判定のために用いる。
【0026】
判定部32は、構造物振動中の加速度センサ20のX軸の出力最大値をAxmax、傾斜センサ10のX軸の出力最大値をSxmaxとして、出力最大値の比Sxmax/Axmaxを算出する。加速度センサ20の計測値は正常とみなすことができるため、もう一方の傾斜センサ10の計測値も正常であれば出力最大値の比Sxmax/Axmaxも所定範囲内となる。そこで、判定部32は、期待値で正規化した正常値の比に対して、出力最大値の比Sxmax/Axmaxが所定の判定範囲(例えば±20%)を超えた場合に、傾斜センサ10の計測値が異常値であると判定し、さらに傾斜検出デバイス11又は傾斜検出回路12に異常が発生しているものと判定する。ここで、1回の異常判定のみでセンサの正常/異常を判断するのではなく、例えば異常値であるという判定部32の判定が所定回数(例えば10回)連続したとき、あるいは累積したときにはじめて傾斜検出デバイス11又は傾斜検出回路12に異常が生じているとする発報(詳細は後述)を行うよう構成してもよい。なお、判定範囲の値は適宜設定すればよい。
【0027】
なお、傾斜センサ10が2軸以上の傾斜角を検出している場合には、判定部32は各軸の出力最大値を利用して異常を判定してもよい。傾斜センサ10が図2(c)に示すようなY軸の傾斜角も検出しているなら、判定部32がこのY軸の出力最大値Symaxを用いて出力最大値の比Symax/Axmaxを算出し、所定の判定範囲と比較する。なお、判定範囲の値は、比算出に用いる軸に応じて適宜変更すればよい。
同様に、加速度センサ20が2軸以上の加速度を検出しているなら、判定部32は傾斜センサ10の任意の軸と加速度センサ20の任意の軸の出力最大値を利用して異常判定することもできる。
【0028】
(2)パワースペクトル比較
判定部32は、構造物振動中の加速度センサ20のX軸の加速度波形をFFT(Fast Fourier Transform)処理して、特定周波数(例えば5Hz)のパワースペクトルをAxfpowerとする。同様に、判定部32は、構造物振動中の傾斜センサ10のX軸の傾斜角波形をFFT処理して、同一の特定周波数(例えば5Hz)のパワースペクトルをSxfpowerとする。加速度センサ20の計測値は正常とみなすことができるため、もう一方の傾斜センサ10の計測値も正常であればパワースペクトルの比Sxfpower/Axfpowerも所定範囲内となる。そこで、判定部32は、期待値で正規化した正常値の比に対して、パワースペクトルの比Sxfpower/Axfpowerが所定の判定範囲(例えば±20%)を超えた場合に、傾斜センサ10の計測値が異常値であると判定し、さらに傾斜検出デバイス11又は傾斜検出回路12に異常が発生しているものと判定する。
【0029】
なお、特定周波数及び判定範囲の値は適宜設定すればよい。ただし、特定周波数については、サンプリングの周期を考慮して決定することが好ましい。例えばサンプリングが毎秒1回(1Hz)で行われていた場合、上記特定周波数(5Hz)の値は±1Hzの範囲で誤差を含むこととなるため、4〜6Hzの範囲における適宜な値を設定する、あるいは4〜6Hzの範囲におけるパワースペクトルの最大値を上記Sxfpower,Axfpowerとすることが考えられる。
【0030】
図3は、図2に示す計測値をFFT処理したパワースペクトルのグラフであり、加速度センサ20の加速度(X軸)のパワースペクトルを図3(a)に、傾斜センサ10の傾斜角(X軸)のパワースペクトルを図3(b)に示す。図3の例のようにピークが複数ある場合、判定部32は、加速度のパワースペクトルのうちの最大ピークを示す周波数(図3(a)では4.5Hz)を特定周波数に設定し、この4.5Hzにおけるパワースペクトルの比Sxfpower/Axfpowerを用いて傾斜センサ10の異常判定を行ってもよい。
【0031】
なお、傾斜センサ10が2軸以上の傾斜角を検出している場合には、上記(1)の異常判定方法と同様に、判定部32は、各軸のパワースペクトルを利用して異常を判定してもよい。さらに、傾斜センサ10及び加速度センサ20がそれぞれ2軸以上の計測値を検出している場合には、上記(1)の異常判定方法と同様に、判定部32は、傾斜センサ10の任意の軸と加速度センサ20の任意の軸のパワースペクトルを利用して異常判定することもできる。
【0032】
(3)最大速度応答比較
図4(a)は、構造物を単純化した、1質点減衰系の物理モデルを示す説明図である。図において、構造物は、運動方向は矢印で示す1方向で固有周期Tも1つだけとしたとき、減衰定数hで振動するおもりで模擬した1自由度1質点減衰系で表現できる。この固有周期Tの物理モデルを用いて、地盤の加速度y(t)の入力に対する固有周期Tの速度応答v(t)を求め、さらに、固有周期Tの速度応答v(t)の最大値Svを求めることができる。
最大速度応答Svの算出方法は、例えば「インテリジェント地震センサの開発、古川ら、Savemation Review、株式会社山武、1999年8月」に記載された既知の方法を用いればよいため、ここでの詳細な説明は省略する。
地盤の加速度y(t)の一例を図4(b)に示し、この入力に対する固有周期Tの速度応答v(t)とその最大速度応答Svのグラフを図4(c)に示す。また、図5は、固有周期T(ここでは周波数で表す)=2,3,5,7Hzの各物理モデルに入力周波数fの加速度(正弦波を仮定)を入力した場合の各最大速度応答Svを示すグラフである。
【0033】
判定部32は、構造物振動中の加速度センサ20のX軸の出力波形から、所定の固有周期Tにおける速度応答v(t)を求め、最大値を最大速度応答AxSvとする。このとき用いた所定の固有周期Tを特定固有周期とする。同様に、判定部32は、構造物振動中の傾斜センサ10のX軸の出力波形から、特定固有周期と同一の値である固有周期T(即ち、同一固有周期)の速度応答v(t)を求め、その最大値を最大速度応答SxSv(最大速度応答に対応する値)とする。加速度センサ20の計測値は正常とみなすことができるため、もう一方の傾斜センサ10の計測値も正常であれば最大速度応答の比SxSv/AxSvも所定の判定範囲内となる。そこで、判定部32は、入力周波数f(例えば5Hz)における最大速度応答の比SxSv/AxSvが所定範囲(例えば±20%)を超えた場合に、傾斜センサ10の計測値が異常値であると判定し、さらに傾斜検出デバイス11又は傾斜検出回路12に異常が発生しているものと判定する。
ただし、一般に傾斜センサ10よりも加速度センサ20の測定精度が高いため、加速度センサ20の出力波形が小さい値の場合にはそもそも異常判定を行わない構成にして、誤判定を防止するようにしてもよい。
【0034】
なお、特定固有周期T、入力周波数f及び判定範囲の値は適宜設定すればよい。特に特定固有周期Tを定めるにあたっては、構造物の構造及び材質等によって適切な固有周期が異なることから、図5に例示したように入力周波数と最大速度応答との関係が顕著となる周期を実験的に求めたうえで決定することが望ましい。また、入力周波数fを複数設定してもよく、例えばf=1,3,5,7,10Hzにおける最大速度応答AxSv,SxSvの比をそれぞれ求め、各入力周波数fにおける最大速度応答の比AxSv/SxSvがそれぞれ判定範囲内であれば、傾斜センサ10の計測値は正常であると判定するようにしてもよい。
【0035】
なお、傾斜センサ10が2軸以上の傾斜角を検出している場合には、上記(1),(2)の異常判定方法と同様に、判定部32は、各軸の最大速度応答を利用して異常を判定してもよい。さらに、傾斜センサ10及び加速度センサ20がそれぞれ2軸以上の計測値を検出している場合には、上記(1),(2)の異常判定方法と同様に、判定部32は、傾斜センサ10の任意の軸と加速度センサ20の任意の軸の最大速度応答を利用して異常判定することもできる。
【0036】
上記(1)の最大値比較では計測値の周波数を考慮せずに時間軸上の最大値を比較し、また、上記(2)のパワースペクトル比較では1つの特定周波数におけるスペクトルを比較する。これに対して、上記(3)の最大速度応答比較では、図5に示すように、固有周期Tの速度応答vが、最大速度応答Svを頂点にして両側にある程度の幅を持つグラフになるため、最大速度応答SxSv,AxSvの比較も、ある程度の幅を持った周波数特性の比較となる。従って、加速度と傾斜角の計測値の周波数のずれを吸収してロバストな比較が可能となり、異常診断の安定性を高めることができる。また、上記(2)に比べ、上記(3)の場合の演算負荷が少ない。
【0037】
なお、上記(1)〜(3)の異常判定方法では、加速度センサ20が正常値を出力していることを前提にして傾斜センサ10の異常判定を実施する構成としたが、加速度センサ20に自己診断部23がない場合には加速度が正常値とは限らないため、傾斜センサ10と加速度センサ20のどちらに異常が発生しているか特定することができない。その場合には、判定部32において、出力最大値の比、パワースペクトルの比、又は最大速度応答の比が所定の判定範囲を超えると、傾斜センサ10又は加速度センサ20に異常が発生しているものと判定するようにすればよい。
ただし、加速度センサ20に自己診断部23がない場合であっても、傾斜角と加速度の計測値が複数軸分あれば、任意の軸の傾斜角と任意の軸の加速度を組み合わせた比同士を比較して異常な値を示す軸を特定し、どちらのセンサに異常が発生しているかを判定することも可能となる。
【0038】
センサ異常診断装置30において、異常判定が所定条件(例えば、上述のように異常判定が10回連続した場合)を満たすとき、異常判定結果を出力部33からネットワーク経由でホストコンピュータ(例えば遠隔にある社屋内のコンピュータ)に送信(発報)すれば、管理者は当該送信されたデータを確認することで異常判定結果を知ることができる。
【0039】
図1に示すセンサ異常診断装置30をコンピュータで構成する場合には、判定部32の処理内容を記述している異常判定プログラムをコンピュータのメモリに格納し、傾斜センサ10及び加速度センサ20の計測値を入力データに用いて、コンピュータのCPUがメモリに格納されている異常判定プログラムを実行する。
【0040】
以上より、実施の形態1によれば、傾斜センサ10が出力する傾斜角と、自己診断部23によって正常に動作していることが診断されている加速度センサ20が出力する加速度とを用いて、判定部32がこれら傾斜角と加速度の比に基づいて傾斜センサ10に異常が生じたことを判定するように構成した。このため、作業者がセンサ設置現場におもむかなくとも傾斜センサ10の異常を判定することができる。
【0041】
また、自己診断部23を有さない加速度センサ20を用いた場合でも、判定部32は傾斜センサ10又は加速度センサ20に異常が発生していることを判定することができる。この構成の場合には、加速度センサ20として自己診断機能を有さない安価な加速度センサを用いることができ、また、作業者がセンサ設置現場におもむかなくとも傾斜センサ10に異常が発生している可能性を判定することができる。
【0042】
なお、上記実施の形態1では、傾斜センサ10及び加速度センサ20を、センサ異常診断装置30とは別体に構成したが、これらを一体に構成して判定部32の自己診断機能を有するセンサシステムにしてもよい。
【0043】
また、上記実施の形態1では、橋梁の健全度評価に用いられる傾斜センサと加速度センサの組み合わせを例に挙げて、自己診断機能を有する一方のセンサの計測値を利用して自己診断機能のない他方のセンサの異常を判定する方法を説明したが、センサの組み合わせはこれに限定されるものではなく、加速度センサ20に代えて角速度センサ、速度センサ、変位センサ等、種々のセンサを利用する構成にしてもよい。あるいは、加速度センサに代えて、傾斜センサ10が測定する傾斜方向(例えばX軸方向の傾斜を測定するよう傾斜センサ10を設置する)とは異なる方向(例えばY軸方向)の傾斜を測定する傾斜センサを別途設けるようにしてもよい。
【符号の説明】
【0044】
10 傾斜センサ
11 傾斜検出デバイス
12 傾斜検出回路
20 加速度センサ
21 加速度検出デバイス
22 加速度検出回路
23 自己診断部
30 センサ異常診断装置
31 AD変換部
32 判定部
33 出力部
【特許請求の範囲】
【請求項1】
構造物に設置された第1のセンサが計測する第1の物理量と、
前記第1のセンサと異なる物理量を測定する目的で設置されたものであって、前記構造物に設置された第2のセンサが計測する第2の物理量とを用いて、
前記第1の物理量と前記第2の物理量とを比較し、当該比較の結果に基づいて前記第1のセンサ又は前記第2のセンサに異常が生じたことを判定する判定部とを備えるセンサ異常診断装置。
【請求項2】
判定部は、所定期間における第1の物理量の最大値と第2の物理量の最大値の比が所定の判定範囲内を超えると、第1のセンサ又は第2のセンサに異常が生じたと判定することを特徴とする請求項1記載のセンサ異常診断装置。
【請求項3】
判定部は、所定期間における第1の物理量のスペクトルと、前記第1の物理量のスペクトルと同一の周波数における第2の物理量のスペクトルの比が所定の判定範囲内を超えると、第1のセンサ又は第2のセンサに異常が生じたと判定することを特徴とする請求項1記載のセンサ異常診断装置。
【請求項4】
第2のセンサは加速度センサであるとともに、第2の物理量は前記加速度センサにより検出される構造物の加速度であり、
判定部は、所定期間における前記加速度センサにより検出された加速度から特定固有周期の最大速度応答を求めるとともに、前記所定期間における第1の物理量から前記特定固有周期と同一の同一固有周期の前記最大速度応答に対応する値を求め、前記最大速度応答と前記最大速度応答に対応する値の比が所定の判定範囲内を超えると、前記第1のセンサ又は前記加速度センサに異常が生じたと判定することを特徴とする請求項1記載のセンサ異常診断装置。
【請求項5】
第1のセンサは傾斜センサであり、第2のセンサは加速度センサであるとともに、第1の物理量は前記傾斜センサにより検出される構造物の傾斜角であり、第2の物理量は前記加速度センサにより検出される前記構造物の加速度であることを特徴とする請求項1から請求項4のうちのいずれか1項記載のセンサ異常診断装置。
【請求項6】
加速度センサは内部に自己診断機能を有し、
判定部は、傾斜センサが計測する傾斜角と、前記加速度センサが計測する自己診断された加速度とを用いて、前記傾斜センサに異常が生じたことを判定することを特徴とする請求項5記載のセンサ異常診断装置。
【請求項7】
内部に自己診断機能を有する加速度センサと、
傾斜角を計測する傾斜センサと、
前記傾斜センサが計測する傾斜角と、前記加速度センサが計測する自己診断された加速度とを比較し、当該比較の結果に基づいて前記傾斜センサに異常が生じたことを判定する判定部とを備えるセンサシステム。
【請求項1】
構造物に設置された第1のセンサが計測する第1の物理量と、
前記第1のセンサと異なる物理量を測定する目的で設置されたものであって、前記構造物に設置された第2のセンサが計測する第2の物理量とを用いて、
前記第1の物理量と前記第2の物理量とを比較し、当該比較の結果に基づいて前記第1のセンサ又は前記第2のセンサに異常が生じたことを判定する判定部とを備えるセンサ異常診断装置。
【請求項2】
判定部は、所定期間における第1の物理量の最大値と第2の物理量の最大値の比が所定の判定範囲内を超えると、第1のセンサ又は第2のセンサに異常が生じたと判定することを特徴とする請求項1記載のセンサ異常診断装置。
【請求項3】
判定部は、所定期間における第1の物理量のスペクトルと、前記第1の物理量のスペクトルと同一の周波数における第2の物理量のスペクトルの比が所定の判定範囲内を超えると、第1のセンサ又は第2のセンサに異常が生じたと判定することを特徴とする請求項1記載のセンサ異常診断装置。
【請求項4】
第2のセンサは加速度センサであるとともに、第2の物理量は前記加速度センサにより検出される構造物の加速度であり、
判定部は、所定期間における前記加速度センサにより検出された加速度から特定固有周期の最大速度応答を求めるとともに、前記所定期間における第1の物理量から前記特定固有周期と同一の同一固有周期の前記最大速度応答に対応する値を求め、前記最大速度応答と前記最大速度応答に対応する値の比が所定の判定範囲内を超えると、前記第1のセンサ又は前記加速度センサに異常が生じたと判定することを特徴とする請求項1記載のセンサ異常診断装置。
【請求項5】
第1のセンサは傾斜センサであり、第2のセンサは加速度センサであるとともに、第1の物理量は前記傾斜センサにより検出される構造物の傾斜角であり、第2の物理量は前記加速度センサにより検出される前記構造物の加速度であることを特徴とする請求項1から請求項4のうちのいずれか1項記載のセンサ異常診断装置。
【請求項6】
加速度センサは内部に自己診断機能を有し、
判定部は、傾斜センサが計測する傾斜角と、前記加速度センサが計測する自己診断された加速度とを用いて、前記傾斜センサに異常が生じたことを判定することを特徴とする請求項5記載のセンサ異常診断装置。
【請求項7】
内部に自己診断機能を有する加速度センサと、
傾斜角を計測する傾斜センサと、
前記傾斜センサが計測する傾斜角と、前記加速度センサが計測する自己診断された加速度とを比較し、当該比較の結果に基づいて前記傾斜センサに異常が生じたことを判定する判定部とを備えるセンサシステム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−18045(P2012−18045A)
【公開日】平成24年1月26日(2012.1.26)
【国際特許分類】
【出願番号】特願2010−154807(P2010−154807)
【出願日】平成22年7月7日(2010.7.7)
【出願人】(000006666)株式会社山武 (1,808)
【出願人】(000221616)東日本旅客鉄道株式会社 (833)
【Fターム(参考)】
【公開日】平成24年1月26日(2012.1.26)
【国際特許分類】
【出願日】平成22年7月7日(2010.7.7)
【出願人】(000006666)株式会社山武 (1,808)
【出願人】(000221616)東日本旅客鉄道株式会社 (833)
【Fターム(参考)】
[ Back to top ]