
センサ統制システム
【課題】探知覆域の組合せ数が増大した場合でも計算機リソースの制限を考慮して探知覆域の最適化処理の高速化および効率化を図る。
【解決手段】探知覆域算出部は、同一センサに対する各探知性能値テーブルのメッシュ配列を分割した各ブロックにおける所定位置の1メッシュのみを対象として各テーブルの探知性能値を加算し、全センサにおいて加算値が最良のメッシュを持つセンサを選択し、当該センサにおいて、最良メッシュを含む近傍の複数メッシュを対象として対応する各テーブルの探知性能値をそれぞれ加算し、その加算値が最良なメッシュを選択してそのメッシュの方位・仰角を当該センサの探知覆域の方位・仰角と決定し、決定した方位・仰角に基づいて該当センサの距離覆域を算出し、算出した距離覆域と決定した方位・仰角に基づいて該当センサの覆域形状を算出する。
【解決手段】探知覆域算出部は、同一センサに対する各探知性能値テーブルのメッシュ配列を分割した各ブロックにおける所定位置の1メッシュのみを対象として各テーブルの探知性能値を加算し、全センサにおいて加算値が最良のメッシュを持つセンサを選択し、当該センサにおいて、最良メッシュを含む近傍の複数メッシュを対象として対応する各テーブルの探知性能値をそれぞれ加算し、その加算値が最良なメッシュを選択してそのメッシュの方位・仰角を当該センサの探知覆域の方位・仰角と決定し、決定した方位・仰角に基づいて該当センサの距離覆域を算出し、算出した距離覆域と決定した方位・仰角に基づいて該当センサの覆域形状を算出する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、複数の飛翔体を監視する単数または複数のセンサをネットワーク化して各センサの探知覆域の最適化をコントロールするセンサ統制システムに関するものである。
【背景技術】
【0002】
複数のセンサを異なる位置に配置して監視空間に要求覆域を形成し、要求覆域内を飛翔する飛翔体を探知したセンサからの探知情報をネットワークを介して入手し統合処理するシステムが知られている。この種のシステムでは、複数のセンサからの情報を迅速に効率よく処理し、かつ漏れなく飛翔体を探知できるようにすることが要求される。その方法の一つとして、要求覆域に対して各センサに割り当てられる探知覆域を最適化して、覆域を探知するために必要な時間であるデータ更新間隔を短くする方法がある(例えば特許文献1および特許文献2参照)。例えば特許文献1の場合では、覆域が隣接したレーダ(センサ)のデータ更新間隔の差が縮小する方向に覆域境界を反復して修正することにより各レーダのデータ更新間隔を均等化し、結果的に統合データ更新間隔が小さくなる覆域境界を得、その覆域境界に基づいてレーダを動作させることで、短いデータ更新間隔で要求覆域を探知するようにしている。
【0003】
【特許文献1】特開2005−300353号公報
【特許文献2】特開2007−212299号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
以上のように、上記特許文献に記載の従来のセンサ統制システムでは、各センサの探知覆域を最適化してデータ更新間隔を短くすることにより処理の高速化、効率化を図っているが、多数のセンサを適用した場合における探知覆域の最適化のための計算処理の問題については改善していない。ところで、ネットワーク化された複数センサに対する探知覆域の最適化を行う場合、全体の制御をリアルタイムに実施することが要求されるが、センサ数が増加した場合、探知覆域の組合せ数(方位×仰角×距離覆域×覆域形状)が膨大な数となり、要求覆域全体に亘って行う探知覆域の最適化処理には膨大な計算機リソース(CPU処理速度やメモリ容量など)を必要とし、また、リアルタイムに実施するには限界があった。
また、従来の探知覆域の最適化は、飛翔体の位置を連続して探知できるように、探知覆域を空間に隣り合わせに途切れることなく一様に配置する方法である。これに対し、ミサイル、特に弾道ミサイルなどの飛翔体を探知する場合における探知覆域の最適化は、飛翔体をより多く、かつより早く探知できるように探知覆域を配置する方法が要求される。
【0005】
この発明は、上記問題点を解決するためになされたもので、探知覆域の組合せ数が増大した場合でも計算機リソースの制限を考慮して探知覆域の最適化処理の高速化および効率化を図るセンサ統制システムを得ることを目的とする。
【課題を解決するための手段】
【0006】
この発明に係るセンサ統制システムは、ネットワーク接続された単数または複数のセンサからセンサ諸元を取得し、各センサに対しては探知覆域の設定指示を送るセンサ統制部と、予め算出した飛翔体の飛翔経路を想定した想定軌道を格納する想定軌道格納部と、想定軌道と各センサ諸元に基づいて、センサと想定軌道の組み合わせ毎に、センサが想定軌道に沿って飛翔するより多くの飛翔体をより早く探知可能かを表す指標となる探知性能値を方位×仰角単位毎に算出する探知性能算出部と、センサと想定軌道の組み合わせ毎に算出された探知性能値を方位×仰角単位のメッシュ配列にした探知性能値テーブルを保持する探知性能値格納部と、探知性能値テーブルに基づいて、より多くの飛翔体をより早く探知するセンサの探知覆域を算出する探知覆域算出部を備え、探知覆域算出部は、同一センサに対する各探知性能値テーブルにおいて、メッシュ配列を複数メッシュのブロック単位に分割し、各ブロックにおける所定位置の1メッシュのみを対象として各テーブルの探知性能値を加算し、全センサにおいて加算値が最も良い値となったメッシュを持つセンサを選択し、当該選択されたセンサにおいて、該当最良メッシュを含む近傍の複数メッシュを対象として対応する各探知性能値テーブルの探知性能値をそれぞれ加算し、複数メッシュの中から探知性能値の加算値が最良なメッシュを選択してそのメッシュの方位・仰角を選択されたセンサの探知覆域の方位・仰角と決定し、決定した方位・仰角に基づいて選択されたセンサの距離覆域を算出し、算出した距離覆域と決定した方位・仰角に基づいて上記選択されたセンサの覆域形状を算出することで、より多くの飛翔体をより早く探知するセンサの探知覆域として決定するものである。
【発明の効果】
【0007】
この発明によれば、探知覆域コスト算出を(方位×仰角)の全てのパターンにおいて行わず、間引きによる(粗い方位×粗い仰角)について実施するため、計算オーダ、処理時間を大幅に改善して計算機リソースを制限し、複数センサの探知覆域の最適化処理の高速化および効率化を図ることができる。
【発明を実施するための最良の形態】
【0008】
実施の形態1.
この発明は、飛翔体を効率的に探知できるようにするために、ネットワーク化された複数のセンサの探知覆域を監視空間に機能的に配置する処理を対象とする。飛翔体は遠距離から高速で飛来してくるため、遠距離を高い頻度で観測する必要があり、センサの性能から探知覆域(センサ毎の方位、仰角、距離および覆域形状)の広さは制約される。そのため、この発明のセンサ統制システムでは、探知覆域を、複数のセンサによってより多くの飛翔体をより早く探知できる方向(以下、主監視方向と呼ぶ)に設定する必要がある。
【0009】
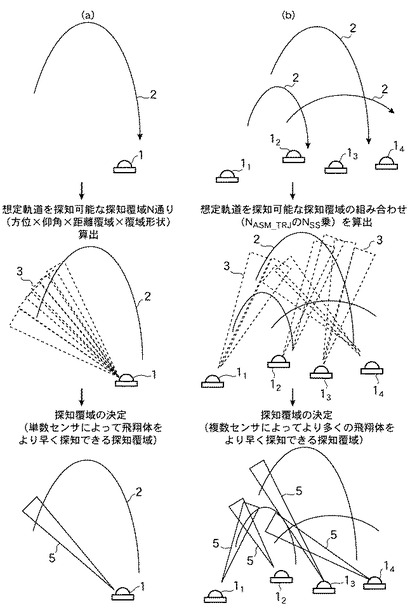
図1は、この発明のセンサの探知覆域コントロールの概念で、上記主監視方向を算出する方法を表したものである。図1(a)は、単数のセンサ1により単一の飛翔体を探索する場合において、この飛翔体について予め想定した飛翔体軌道モデル(以下、想定軌道と呼ぶ)2を用い、センサ1の想定軌道2に対する探知可能な探知覆域3を求め、センサ1からの主監視方向を決定してより早く飛翔体を探知できる最適な探知覆域5を決定し設定する方法を表している。また、図1(b)は、複数のセンサ11 〜14 により複数の飛翔体を探索する場合において、それぞれの飛翔体の想定軌道2用い、この複数の想定軌道2に対する探知可能な探知覆域3を求め、各センサからの主監視方向を決定してそれぞれの最適な探知覆域5を決定し設定する方法を表している。
【0010】
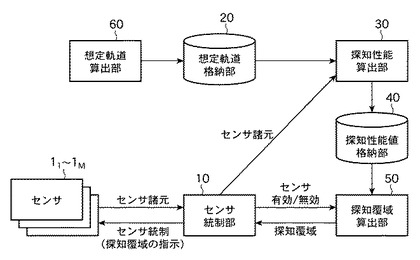
図2は、この発明の各実施の形態によるセンサ統制システムの機能構成を示すブロック図である。
複数のセンサ11 〜1M が、飛翔する飛翔体を探知するために異なる位置に配置され、監視センタにあるセンサ統制部10とネットワーク(有線または無線)で接続されている。センサ11 〜1M からは、それぞれのセンサ諸元がセンサ統制部10に送られ、センサ統制部10からは各センサに対してそれぞれが設定すべき探知覆域の指示が送られる。目標である飛翔体の諸元が分かっているか、または推定できる場合で、かつ例えば監視衛星などで飛翔体の発射地点が分かっている場合、その飛翔体の想定軌道は算出可能である。そこで、想定軌道算出部60により、目標となる飛翔体の飛翔経路を想定した想定軌道を予め算出しておき、想定軌道格納部20に格納しておく。
【0011】
探知性能算出部30では、想定軌道格納部20の想定軌道(単数の場合もあれば複数の場合もある)とセンサ統制部10で取得した各センサのセンサ諸元に基づいて、センサと想定軌道の組み合わせ毎に、センサが想定軌道に沿って飛翔するより多くの飛翔体をいかに早く探知可能かを表す指標となる探知性能値を算出する。そのため、探知性能値は、飛翔体が発射されてから探知されるまでの経過時間が小さいほど良い値となる特性を持つ関数を用いて決定される。具体的な探知性能値の具体的な算出方法を次に説明する。
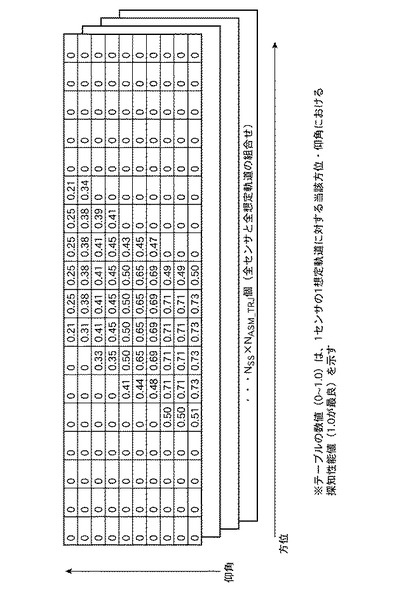
センサ諸元から、方位ΔAz刻み、仰角ΔEl刻みにして方位・仰角を量子化して図3に示すように、1センサと1想定軌道の組み合わせに対して、方位×仰角;(360/ΔAz)×(ElMAX /ΔEl)のメッシュを持つテーブル(以下、探知性能値テーブルと呼ぶ)を1つ生成する。各メッシュには対応する方位・仰角ごとにセンサが該当飛翔体を探知できるかを判断して探知性能値PDET が設定される。ここでは、飛翔体が飛翔開始から当該センサによって初めて探知されるまでの時間TDET に注目し、TDET が短いほど探知が早いとして探知性能値PDET に大きい値(最大1.0)を設定し、一方、TDET が長いほど探知が遅いとして探知性能値PDET に小さい値(最小0.0)を設定する。なお、当該センサで該当飛翔体が探知されない場合は探知性能値PDET に最小値(0.0)を設定する。探知性能値PDET は(1)式を用いて設定される。
PDET =1.0 (TDET <Tβ の場合)
(Tβ −TDET )/(Tβ −Tα ) (Tα ≦TDET ≦Tβ の場合)
0.0 (Tα ≦TDET または非検出の場合)
(1)
ここで、Tα は探知時間の最も早い値(パラメータ)、Tβ (>Tα )は探知時間の最も遅い値(パラメータ)とする。
探知性能値は、センサ×探知覆域(方位×仰角)×想定軌道の全組み合わせについて算出され、図3に示すように方位×仰角単位のメッシュ配列にした探知性能値テーブルにして探知性能値格納部40で保持される。上述の探知性能値テーブルは、全センサNSS台と全想定軌道NASM_TRJ 個との組み合わせでNSS×NASM_TRJ 個算出される。
【0012】
次に、探知性能値格納部40で保持された、図3の探知性能値テーブルに基づいて、より多くの飛翔体をより早く探知するセンサの探知覆域(方位・仰角、距離覆域、覆域形状)を算出する。すなわち、各センサについて、センサの全方位(360°)および仰角0°〜最大仰角ElMAXを監視の対象領域として、図1(b)に示すような複数センサによって、より多くの飛翔体をより早く探知する方位・仰角の決定を行う。
一般的な処理方法として、NSS個のセンサそれぞれについて、全想定軌道NASM_TRJ個に対する探知性能値テーブルを次の通り集計する。1センサについて想定軌道に対するNASM_TRJ個の探知性能値テーブルを対象とし、方位×仰角のメッシュ毎の探知性能値をNASM_TRJ個について総和を得る。この総和は、あるセンサをある方位・仰角に設定した場合に、複数の飛翔体が探知されることを想定して、それらの探知性能値を加算したもの(以下、探知覆域コストと呼ぶ)で、探知覆域コストが大きいほど当該センサの当該方位・仰角において、より多くの飛翔体がより早く探知されると見なすことができる。しかし、一般的な方法だと、上記探知覆域コストの算出において、(360/ΔAz)×(ElMAX /ΔEl)個の複数メッシュのそれぞれについて(NASM_TRJ −1)回の加算を実行することになるため、全想定軌道に対し全てのセンサについて行うと計算量が膨大となってしまう。この計算量を低減するために、この発明の探知覆域算出部50では次に述べるような処理を行う。
【0013】
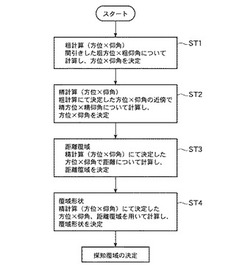
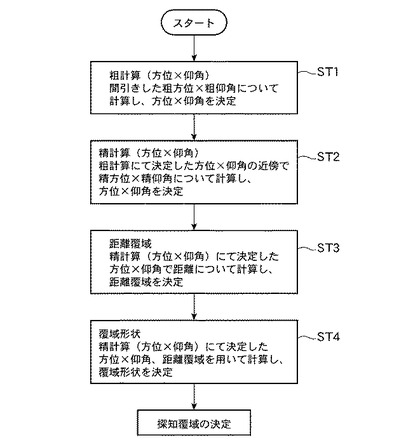
図4は、探知覆域算出部50による探知覆域の主監視方向の算出処理の手順を示すフローチャートである。
まず、探知覆域算出部50では、粗方位×粗仰角の組合せについて、距離方向は全距離対象、覆域形状は全覆域形状の論理和形状として、探知効率が最適となる粗い解(方位・仰角)を算出する。具体的には、探知性能値テーブルのメッシュを方位・仰角の両方向に1メッシュずつ間引いたメッシュ(360/ΔAz)×(ElMAX /ΔEl)/4個に対して計算を実施する。(ステップST1)。すわなち、この粗計算は、図3に示す探知性能値テーブルの全メッシュを2メッシュ×2メッシュのブロックに分割した場合に、各ブロックにおいて所定位置、例えば左上にある1メッシュのみを計算対象とする(以下、元のメッシュを精方位×精仰角のメッシュ、間引き後のメッシュを粗方位×粗仰角のメッシュと呼ぶ)。
【0014】
続いて、上記ステップST1において、粗計算による探知覆域コスト計算をセンサNSS台について実施し、センサNSS台の粗方位×粗仰角について得られた探知覆域コスト=NSS×(360/ΔAz)×(ElMAX /ΔEl)/4個の中から最良の値を持つメッシュMOPTを選択する。メッシュMOPT は、全センサNSS個で全想定軌道NASM_TRJ 個を観測する中で、より多くの飛翔体をより早く探知する最も評価の良いセンサの仰角・方位を示す。なお、上述のステップST1の粗計算によらない場合にも、本メッシュMOPT が当該センサの方位・仰角として決定されることになる。
【0015】
次に、粗い解(方位・仰角)の近傍に絞って精方位×精仰角の組合せについて探知覆域スコアが最良となる精密な解(方位・仰角)を算出する。具体的には、ステップST1で算出されたMOPT を含む近傍について、精方位3メッシュ×精仰角3メッシュを対象として、再度、探知覆域コストを求める(ステップST2)。この精計算によって算出された9個の探知覆域コストの中からコスト最良のメッシュMOPT ’を選択し、この方位・仰角を当該センサの探知覆域の方位・仰角として決定する。
続いて、ステップST2の精計算で決定された方位・仰角に基づいて探知覆域スコアが最良となる距離を計算して距離覆域を決定する(ステップST3)。さらに、当該距離覆域と精計算の方位・仰角に基づいて探知覆域スコアが最良となる覆域形状を決定する(ステップST4)。
探知覆域算出部50においてNSS個のセンサそれぞれについて算出された探知覆域のデータ、すなわち方位×仰角、距離覆域、覆域形状はセンサ統制部10に渡され、センサ統制部10はこれらのデータに基づいて各センサに対して指示を出し、それぞれのセンサの探知覆域を設定する。
【0016】
以上のように、探知性能値テーブルに基づいて、粗計算(方位×仰角)(ST1)、精計算(方位×仰角)(ST2)、距離覆域(ST3)、覆域形状(ST4)の計算を逐次行うことによってより多くの飛翔体をより早く探知するセンサの探知覆域を決定するが、そのための計算量は下記のように改善される。特にAおよびEのパターン数が多くなるほど計算オーダの改善率は高くなる。
O(NCAL ×NSS2) → O(NCAL ´×NSS2) (2)
NCAL =A×E×R×F
NCAL ´=A/KA +E/KE +P+R+F
ここで、Aは方位の数、Eは仰角の数、Rは距離覆域の数、Fは覆域形状の数、
KA 、KE は方位、仰角の粗さ係数、Pは暫定解近傍数である。なお、KおよびPは調整可能である。
【0017】
ところで、センサの全周(方位360°)をΔAz刻みで探知性能値を算出する場合は、方位方向で(360/ΔAz)個のメッシュを用意することになるが、センサの全ての探知覆域の組合せについて探知性能値を保持すると計算メモリ容量が非現実的な大きさになる。しかし、探知性能値がゼロとなるデータは、想定軌道が覆域外となって飛翔体が探知されることがない探知覆域を表しているので、データとして保持する必要がない。想定軌道が探知されるのはセンサの方位覆域幅相当であり、当該方位のみデータを保持すれば十分である。よって、全方位のデータを保持せず、センサの方位覆域幅相当のデータのみを保持することで、計算機のメモリ容量は1/10〜1/100程度まで節約できることになる。
【0018】
また、探知性能値のデータ保持に、探知性能値が近接する方位については同値となる性質を利用してランレングス方式によるデータ圧縮を適用するとメモリ容量削減できて有効である。すなわち、ランレングス方式による探知性能値データ圧縮を適用する場合は、探知性能値が例えば、0000…(256個連続でゼロ)などゼロが続く場合は、00FF(始めの1バイトは連続する数値、次の1バイトは連続回数から1を引いたもので最大255)へ変換されるため、計算のメモリ容量は最大圧縮率2/256=1/128まで節約される。
さらに、C++のSTL(Standard Template Library)を適用して探知性能値を圧縮して保持することによりメモリ容量を削減できるようにしてもよい。
【0019】
以上のように、この実施の形態1によれば、飛翔体毎の想定軌道と各センサ諸元に基づいて、センサと想定軌道の組み合わせ毎に、より多くの飛翔体をより早く探知可能かを表す指標となる探知性能値を方位×仰角単位毎に算出して方位×仰角単位のメッシュ配列にした探知性能値テーブルを生成し、探知覆域算出部50により、同一センサに対する各探知性能値テーブルにおいて、メッシュ配列を複数メッシュのブロック単位に分割し、各ブロックにおける所定位置の1メッシュのみを対象として各テーブルの探知性能値を加算し、全センサにおいて前記加算値が最も良い値となったメッシュを持つセンサを選択し、当該選択されたセンサにおいて、該当最良メッシュを含む近傍の複数メッシュを対象として対応する各探知性能値テーブルの探知性能値をそれぞれ加算し、複数メッシュの中から探知性能値の加算値が最良なメッシュを選択してそのメッシュの方位・仰角を前記選択されたセンサの探知覆域の方位・仰角と決定し、決定した方位・仰角に基づいて該当センサの距離覆域を算出し、算出した距離覆域と方位・仰角に基づいて該当センサの覆域形状を算出するようにしている。
したがって、探知覆域コスト算出を(方位×仰角)の全てのパターンにおいて行わず、間引きによる(粗い方位×粗い仰角)について実施するため、計算オーダ、処理時間を大幅に改善して計算機リソースを制限して複数センサの探知覆域の最適化処理の高速化および効率化を図ることができる。結果、COTS(Commodity-Off-The-Shelf)計算機を使用して処理することも可能となる。また、本来ならば(方位×仰角×距離×覆域形状)の全てのパターンについて探知覆域コストを算出するべきところを、(方位×仰角)、距離、覆域形状の順に最適解を求めることができる。
【0020】
また、探知性能値格納部40で保持する探知性能値として、想定軌道が探知される、センサの方位覆域幅相当のデータのみとすることで、計算機のメモリ容量を大幅に節約できる。さらに、探知性能値のデータ保持において、C++のSTLまたはランレングス圧縮を行うことで、メモリ容量を大幅に節約できる。
なお、上記例では、図1(b)の複数のセンサによる最適な探知覆域の算出について説明してきたが、この実施の形態1の方法は図1(a)の単数のセンサによる場合にも同様に適用できることは容易に理解できよう。
【0021】
実施の形態2.
複数のセンサをネットワーク化したシステムでは、稼動中のセンサが障害発生などによって停止することが起こる。図2において、センサ統制部10では、各各センサの状態を監視し検出状態を探知覆域算出部50に与える。センサ統制部10で無効状態のセンサを検出した場合、探知覆域算出部50では、探知性能値格納部で保持していた既存の正常なセンサの探知性能値のみを用いて実施の形態1と同様な方法で最適な探知覆域を再計算する。この場合、既存の正常なセンサについては探知性能値に変更がないため、前回の最適計算で求めて探知性能値格納部40で保持している探知性能値を、想定軌道に変更がない限り再利用することができる。すなわち、探知性能算出部30による探知性能値計算は最初に行った1回で済む。したがって、探知覆域算出部50では、正常な既存のセンサの探知性能値を用いて、より多くの飛翔体をより早く探知するセンサの探知覆域を算出し直せばよいことになる。
【図面の簡単な説明】
【0022】
【図1】この発明に係るセンサの探知覆域コントロールの概念を示す説明図である。
【図2】この発明の各実施の形態によるセンサ統制システムの機能構成を示すブロック図である。
【図3】この発明の実施の形態1に係る探知性能値テーブルの例を示す説明図である。
【図4】この発明の実施の形態1に係る探知覆域算出部による処理手順を示すフローチャートである。
【符号の説明】
【0023】
1,11 〜1M センサ、2 想定軌道、3 探知覆域(センサ毎の方位、仰角、距離、及び覆域形状)の全ての組合せ、5 最適な探知覆域、10 センサ統制部、20 想定軌道格納部、30 探知性能算出部、40 探知性能値格納部、50 探知覆域算出部。
【技術分野】
【0001】
この発明は、複数の飛翔体を監視する単数または複数のセンサをネットワーク化して各センサの探知覆域の最適化をコントロールするセンサ統制システムに関するものである。
【背景技術】
【0002】
複数のセンサを異なる位置に配置して監視空間に要求覆域を形成し、要求覆域内を飛翔する飛翔体を探知したセンサからの探知情報をネットワークを介して入手し統合処理するシステムが知られている。この種のシステムでは、複数のセンサからの情報を迅速に効率よく処理し、かつ漏れなく飛翔体を探知できるようにすることが要求される。その方法の一つとして、要求覆域に対して各センサに割り当てられる探知覆域を最適化して、覆域を探知するために必要な時間であるデータ更新間隔を短くする方法がある(例えば特許文献1および特許文献2参照)。例えば特許文献1の場合では、覆域が隣接したレーダ(センサ)のデータ更新間隔の差が縮小する方向に覆域境界を反復して修正することにより各レーダのデータ更新間隔を均等化し、結果的に統合データ更新間隔が小さくなる覆域境界を得、その覆域境界に基づいてレーダを動作させることで、短いデータ更新間隔で要求覆域を探知するようにしている。
【0003】
【特許文献1】特開2005−300353号公報
【特許文献2】特開2007−212299号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
以上のように、上記特許文献に記載の従来のセンサ統制システムでは、各センサの探知覆域を最適化してデータ更新間隔を短くすることにより処理の高速化、効率化を図っているが、多数のセンサを適用した場合における探知覆域の最適化のための計算処理の問題については改善していない。ところで、ネットワーク化された複数センサに対する探知覆域の最適化を行う場合、全体の制御をリアルタイムに実施することが要求されるが、センサ数が増加した場合、探知覆域の組合せ数(方位×仰角×距離覆域×覆域形状)が膨大な数となり、要求覆域全体に亘って行う探知覆域の最適化処理には膨大な計算機リソース(CPU処理速度やメモリ容量など)を必要とし、また、リアルタイムに実施するには限界があった。
また、従来の探知覆域の最適化は、飛翔体の位置を連続して探知できるように、探知覆域を空間に隣り合わせに途切れることなく一様に配置する方法である。これに対し、ミサイル、特に弾道ミサイルなどの飛翔体を探知する場合における探知覆域の最適化は、飛翔体をより多く、かつより早く探知できるように探知覆域を配置する方法が要求される。
【0005】
この発明は、上記問題点を解決するためになされたもので、探知覆域の組合せ数が増大した場合でも計算機リソースの制限を考慮して探知覆域の最適化処理の高速化および効率化を図るセンサ統制システムを得ることを目的とする。
【課題を解決するための手段】
【0006】
この発明に係るセンサ統制システムは、ネットワーク接続された単数または複数のセンサからセンサ諸元を取得し、各センサに対しては探知覆域の設定指示を送るセンサ統制部と、予め算出した飛翔体の飛翔経路を想定した想定軌道を格納する想定軌道格納部と、想定軌道と各センサ諸元に基づいて、センサと想定軌道の組み合わせ毎に、センサが想定軌道に沿って飛翔するより多くの飛翔体をより早く探知可能かを表す指標となる探知性能値を方位×仰角単位毎に算出する探知性能算出部と、センサと想定軌道の組み合わせ毎に算出された探知性能値を方位×仰角単位のメッシュ配列にした探知性能値テーブルを保持する探知性能値格納部と、探知性能値テーブルに基づいて、より多くの飛翔体をより早く探知するセンサの探知覆域を算出する探知覆域算出部を備え、探知覆域算出部は、同一センサに対する各探知性能値テーブルにおいて、メッシュ配列を複数メッシュのブロック単位に分割し、各ブロックにおける所定位置の1メッシュのみを対象として各テーブルの探知性能値を加算し、全センサにおいて加算値が最も良い値となったメッシュを持つセンサを選択し、当該選択されたセンサにおいて、該当最良メッシュを含む近傍の複数メッシュを対象として対応する各探知性能値テーブルの探知性能値をそれぞれ加算し、複数メッシュの中から探知性能値の加算値が最良なメッシュを選択してそのメッシュの方位・仰角を選択されたセンサの探知覆域の方位・仰角と決定し、決定した方位・仰角に基づいて選択されたセンサの距離覆域を算出し、算出した距離覆域と決定した方位・仰角に基づいて上記選択されたセンサの覆域形状を算出することで、より多くの飛翔体をより早く探知するセンサの探知覆域として決定するものである。
【発明の効果】
【0007】
この発明によれば、探知覆域コスト算出を(方位×仰角)の全てのパターンにおいて行わず、間引きによる(粗い方位×粗い仰角)について実施するため、計算オーダ、処理時間を大幅に改善して計算機リソースを制限し、複数センサの探知覆域の最適化処理の高速化および効率化を図ることができる。
【発明を実施するための最良の形態】
【0008】
実施の形態1.
この発明は、飛翔体を効率的に探知できるようにするために、ネットワーク化された複数のセンサの探知覆域を監視空間に機能的に配置する処理を対象とする。飛翔体は遠距離から高速で飛来してくるため、遠距離を高い頻度で観測する必要があり、センサの性能から探知覆域(センサ毎の方位、仰角、距離および覆域形状)の広さは制約される。そのため、この発明のセンサ統制システムでは、探知覆域を、複数のセンサによってより多くの飛翔体をより早く探知できる方向(以下、主監視方向と呼ぶ)に設定する必要がある。
【0009】
図1は、この発明のセンサの探知覆域コントロールの概念で、上記主監視方向を算出する方法を表したものである。図1(a)は、単数のセンサ1により単一の飛翔体を探索する場合において、この飛翔体について予め想定した飛翔体軌道モデル(以下、想定軌道と呼ぶ)2を用い、センサ1の想定軌道2に対する探知可能な探知覆域3を求め、センサ1からの主監視方向を決定してより早く飛翔体を探知できる最適な探知覆域5を決定し設定する方法を表している。また、図1(b)は、複数のセンサ11 〜14 により複数の飛翔体を探索する場合において、それぞれの飛翔体の想定軌道2用い、この複数の想定軌道2に対する探知可能な探知覆域3を求め、各センサからの主監視方向を決定してそれぞれの最適な探知覆域5を決定し設定する方法を表している。
【0010】
図2は、この発明の各実施の形態によるセンサ統制システムの機能構成を示すブロック図である。
複数のセンサ11 〜1M が、飛翔する飛翔体を探知するために異なる位置に配置され、監視センタにあるセンサ統制部10とネットワーク(有線または無線)で接続されている。センサ11 〜1M からは、それぞれのセンサ諸元がセンサ統制部10に送られ、センサ統制部10からは各センサに対してそれぞれが設定すべき探知覆域の指示が送られる。目標である飛翔体の諸元が分かっているか、または推定できる場合で、かつ例えば監視衛星などで飛翔体の発射地点が分かっている場合、その飛翔体の想定軌道は算出可能である。そこで、想定軌道算出部60により、目標となる飛翔体の飛翔経路を想定した想定軌道を予め算出しておき、想定軌道格納部20に格納しておく。
【0011】
探知性能算出部30では、想定軌道格納部20の想定軌道(単数の場合もあれば複数の場合もある)とセンサ統制部10で取得した各センサのセンサ諸元に基づいて、センサと想定軌道の組み合わせ毎に、センサが想定軌道に沿って飛翔するより多くの飛翔体をいかに早く探知可能かを表す指標となる探知性能値を算出する。そのため、探知性能値は、飛翔体が発射されてから探知されるまでの経過時間が小さいほど良い値となる特性を持つ関数を用いて決定される。具体的な探知性能値の具体的な算出方法を次に説明する。
センサ諸元から、方位ΔAz刻み、仰角ΔEl刻みにして方位・仰角を量子化して図3に示すように、1センサと1想定軌道の組み合わせに対して、方位×仰角;(360/ΔAz)×(ElMAX /ΔEl)のメッシュを持つテーブル(以下、探知性能値テーブルと呼ぶ)を1つ生成する。各メッシュには対応する方位・仰角ごとにセンサが該当飛翔体を探知できるかを判断して探知性能値PDET が設定される。ここでは、飛翔体が飛翔開始から当該センサによって初めて探知されるまでの時間TDET に注目し、TDET が短いほど探知が早いとして探知性能値PDET に大きい値(最大1.0)を設定し、一方、TDET が長いほど探知が遅いとして探知性能値PDET に小さい値(最小0.0)を設定する。なお、当該センサで該当飛翔体が探知されない場合は探知性能値PDET に最小値(0.0)を設定する。探知性能値PDET は(1)式を用いて設定される。
PDET =1.0 (TDET <Tβ の場合)
(Tβ −TDET )/(Tβ −Tα ) (Tα ≦TDET ≦Tβ の場合)
0.0 (Tα ≦TDET または非検出の場合)
(1)
ここで、Tα は探知時間の最も早い値(パラメータ)、Tβ (>Tα )は探知時間の最も遅い値(パラメータ)とする。
探知性能値は、センサ×探知覆域(方位×仰角)×想定軌道の全組み合わせについて算出され、図3に示すように方位×仰角単位のメッシュ配列にした探知性能値テーブルにして探知性能値格納部40で保持される。上述の探知性能値テーブルは、全センサNSS台と全想定軌道NASM_TRJ 個との組み合わせでNSS×NASM_TRJ 個算出される。
【0012】
次に、探知性能値格納部40で保持された、図3の探知性能値テーブルに基づいて、より多くの飛翔体をより早く探知するセンサの探知覆域(方位・仰角、距離覆域、覆域形状)を算出する。すなわち、各センサについて、センサの全方位(360°)および仰角0°〜最大仰角ElMAXを監視の対象領域として、図1(b)に示すような複数センサによって、より多くの飛翔体をより早く探知する方位・仰角の決定を行う。
一般的な処理方法として、NSS個のセンサそれぞれについて、全想定軌道NASM_TRJ個に対する探知性能値テーブルを次の通り集計する。1センサについて想定軌道に対するNASM_TRJ個の探知性能値テーブルを対象とし、方位×仰角のメッシュ毎の探知性能値をNASM_TRJ個について総和を得る。この総和は、あるセンサをある方位・仰角に設定した場合に、複数の飛翔体が探知されることを想定して、それらの探知性能値を加算したもの(以下、探知覆域コストと呼ぶ)で、探知覆域コストが大きいほど当該センサの当該方位・仰角において、より多くの飛翔体がより早く探知されると見なすことができる。しかし、一般的な方法だと、上記探知覆域コストの算出において、(360/ΔAz)×(ElMAX /ΔEl)個の複数メッシュのそれぞれについて(NASM_TRJ −1)回の加算を実行することになるため、全想定軌道に対し全てのセンサについて行うと計算量が膨大となってしまう。この計算量を低減するために、この発明の探知覆域算出部50では次に述べるような処理を行う。
【0013】
図4は、探知覆域算出部50による探知覆域の主監視方向の算出処理の手順を示すフローチャートである。
まず、探知覆域算出部50では、粗方位×粗仰角の組合せについて、距離方向は全距離対象、覆域形状は全覆域形状の論理和形状として、探知効率が最適となる粗い解(方位・仰角)を算出する。具体的には、探知性能値テーブルのメッシュを方位・仰角の両方向に1メッシュずつ間引いたメッシュ(360/ΔAz)×(ElMAX /ΔEl)/4個に対して計算を実施する。(ステップST1)。すわなち、この粗計算は、図3に示す探知性能値テーブルの全メッシュを2メッシュ×2メッシュのブロックに分割した場合に、各ブロックにおいて所定位置、例えば左上にある1メッシュのみを計算対象とする(以下、元のメッシュを精方位×精仰角のメッシュ、間引き後のメッシュを粗方位×粗仰角のメッシュと呼ぶ)。
【0014】
続いて、上記ステップST1において、粗計算による探知覆域コスト計算をセンサNSS台について実施し、センサNSS台の粗方位×粗仰角について得られた探知覆域コスト=NSS×(360/ΔAz)×(ElMAX /ΔEl)/4個の中から最良の値を持つメッシュMOPTを選択する。メッシュMOPT は、全センサNSS個で全想定軌道NASM_TRJ 個を観測する中で、より多くの飛翔体をより早く探知する最も評価の良いセンサの仰角・方位を示す。なお、上述のステップST1の粗計算によらない場合にも、本メッシュMOPT が当該センサの方位・仰角として決定されることになる。
【0015】
次に、粗い解(方位・仰角)の近傍に絞って精方位×精仰角の組合せについて探知覆域スコアが最良となる精密な解(方位・仰角)を算出する。具体的には、ステップST1で算出されたMOPT を含む近傍について、精方位3メッシュ×精仰角3メッシュを対象として、再度、探知覆域コストを求める(ステップST2)。この精計算によって算出された9個の探知覆域コストの中からコスト最良のメッシュMOPT ’を選択し、この方位・仰角を当該センサの探知覆域の方位・仰角として決定する。
続いて、ステップST2の精計算で決定された方位・仰角に基づいて探知覆域スコアが最良となる距離を計算して距離覆域を決定する(ステップST3)。さらに、当該距離覆域と精計算の方位・仰角に基づいて探知覆域スコアが最良となる覆域形状を決定する(ステップST4)。
探知覆域算出部50においてNSS個のセンサそれぞれについて算出された探知覆域のデータ、すなわち方位×仰角、距離覆域、覆域形状はセンサ統制部10に渡され、センサ統制部10はこれらのデータに基づいて各センサに対して指示を出し、それぞれのセンサの探知覆域を設定する。
【0016】
以上のように、探知性能値テーブルに基づいて、粗計算(方位×仰角)(ST1)、精計算(方位×仰角)(ST2)、距離覆域(ST3)、覆域形状(ST4)の計算を逐次行うことによってより多くの飛翔体をより早く探知するセンサの探知覆域を決定するが、そのための計算量は下記のように改善される。特にAおよびEのパターン数が多くなるほど計算オーダの改善率は高くなる。
O(NCAL ×NSS2) → O(NCAL ´×NSS2) (2)
NCAL =A×E×R×F
NCAL ´=A/KA +E/KE +P+R+F
ここで、Aは方位の数、Eは仰角の数、Rは距離覆域の数、Fは覆域形状の数、
KA 、KE は方位、仰角の粗さ係数、Pは暫定解近傍数である。なお、KおよびPは調整可能である。
【0017】
ところで、センサの全周(方位360°)をΔAz刻みで探知性能値を算出する場合は、方位方向で(360/ΔAz)個のメッシュを用意することになるが、センサの全ての探知覆域の組合せについて探知性能値を保持すると計算メモリ容量が非現実的な大きさになる。しかし、探知性能値がゼロとなるデータは、想定軌道が覆域外となって飛翔体が探知されることがない探知覆域を表しているので、データとして保持する必要がない。想定軌道が探知されるのはセンサの方位覆域幅相当であり、当該方位のみデータを保持すれば十分である。よって、全方位のデータを保持せず、センサの方位覆域幅相当のデータのみを保持することで、計算機のメモリ容量は1/10〜1/100程度まで節約できることになる。
【0018】
また、探知性能値のデータ保持に、探知性能値が近接する方位については同値となる性質を利用してランレングス方式によるデータ圧縮を適用するとメモリ容量削減できて有効である。すなわち、ランレングス方式による探知性能値データ圧縮を適用する場合は、探知性能値が例えば、0000…(256個連続でゼロ)などゼロが続く場合は、00FF(始めの1バイトは連続する数値、次の1バイトは連続回数から1を引いたもので最大255)へ変換されるため、計算のメモリ容量は最大圧縮率2/256=1/128まで節約される。
さらに、C++のSTL(Standard Template Library)を適用して探知性能値を圧縮して保持することによりメモリ容量を削減できるようにしてもよい。
【0019】
以上のように、この実施の形態1によれば、飛翔体毎の想定軌道と各センサ諸元に基づいて、センサと想定軌道の組み合わせ毎に、より多くの飛翔体をより早く探知可能かを表す指標となる探知性能値を方位×仰角単位毎に算出して方位×仰角単位のメッシュ配列にした探知性能値テーブルを生成し、探知覆域算出部50により、同一センサに対する各探知性能値テーブルにおいて、メッシュ配列を複数メッシュのブロック単位に分割し、各ブロックにおける所定位置の1メッシュのみを対象として各テーブルの探知性能値を加算し、全センサにおいて前記加算値が最も良い値となったメッシュを持つセンサを選択し、当該選択されたセンサにおいて、該当最良メッシュを含む近傍の複数メッシュを対象として対応する各探知性能値テーブルの探知性能値をそれぞれ加算し、複数メッシュの中から探知性能値の加算値が最良なメッシュを選択してそのメッシュの方位・仰角を前記選択されたセンサの探知覆域の方位・仰角と決定し、決定した方位・仰角に基づいて該当センサの距離覆域を算出し、算出した距離覆域と方位・仰角に基づいて該当センサの覆域形状を算出するようにしている。
したがって、探知覆域コスト算出を(方位×仰角)の全てのパターンにおいて行わず、間引きによる(粗い方位×粗い仰角)について実施するため、計算オーダ、処理時間を大幅に改善して計算機リソースを制限して複数センサの探知覆域の最適化処理の高速化および効率化を図ることができる。結果、COTS(Commodity-Off-The-Shelf)計算機を使用して処理することも可能となる。また、本来ならば(方位×仰角×距離×覆域形状)の全てのパターンについて探知覆域コストを算出するべきところを、(方位×仰角)、距離、覆域形状の順に最適解を求めることができる。
【0020】
また、探知性能値格納部40で保持する探知性能値として、想定軌道が探知される、センサの方位覆域幅相当のデータのみとすることで、計算機のメモリ容量を大幅に節約できる。さらに、探知性能値のデータ保持において、C++のSTLまたはランレングス圧縮を行うことで、メモリ容量を大幅に節約できる。
なお、上記例では、図1(b)の複数のセンサによる最適な探知覆域の算出について説明してきたが、この実施の形態1の方法は図1(a)の単数のセンサによる場合にも同様に適用できることは容易に理解できよう。
【0021】
実施の形態2.
複数のセンサをネットワーク化したシステムでは、稼動中のセンサが障害発生などによって停止することが起こる。図2において、センサ統制部10では、各各センサの状態を監視し検出状態を探知覆域算出部50に与える。センサ統制部10で無効状態のセンサを検出した場合、探知覆域算出部50では、探知性能値格納部で保持していた既存の正常なセンサの探知性能値のみを用いて実施の形態1と同様な方法で最適な探知覆域を再計算する。この場合、既存の正常なセンサについては探知性能値に変更がないため、前回の最適計算で求めて探知性能値格納部40で保持している探知性能値を、想定軌道に変更がない限り再利用することができる。すなわち、探知性能算出部30による探知性能値計算は最初に行った1回で済む。したがって、探知覆域算出部50では、正常な既存のセンサの探知性能値を用いて、より多くの飛翔体をより早く探知するセンサの探知覆域を算出し直せばよいことになる。
【図面の簡単な説明】
【0022】
【図1】この発明に係るセンサの探知覆域コントロールの概念を示す説明図である。
【図2】この発明の各実施の形態によるセンサ統制システムの機能構成を示すブロック図である。
【図3】この発明の実施の形態1に係る探知性能値テーブルの例を示す説明図である。
【図4】この発明の実施の形態1に係る探知覆域算出部による処理手順を示すフローチャートである。
【符号の説明】
【0023】
1,11 〜1M センサ、2 想定軌道、3 探知覆域(センサ毎の方位、仰角、距離、及び覆域形状)の全ての組合せ、5 最適な探知覆域、10 センサ統制部、20 想定軌道格納部、30 探知性能算出部、40 探知性能値格納部、50 探知覆域算出部。
【特許請求の範囲】
【請求項1】
ネットワーク接続された単数または複数のセンサからセンサ諸元を取得し、各センサに対しては探知覆域の設定指示を送るセンサ統制部と、
予め算出した飛翔体の飛翔経路を想定した想定軌道を格納する想定軌道格納部と、
前記想定軌道と前記各センサ諸元に基づいて、センサと想定軌道の組み合わせ毎に、センサが想定軌道に沿って飛翔するより多くの飛翔体をより早く探知可能かを表す指標となる探知性能値を方位×仰角単位毎に算出する探知性能算出部と、
前記センサと想定軌道の組み合わせ毎に算出された探知性能値を前記方位×仰角単位のメッシュ配列にした探知性能値テーブルを保持する探知性能値格納部と、
前記探知性能値テーブルに基づいて、より多くの飛翔体をより早く探知するセンサの探知覆域を算出する探知覆域算出部を備え、
前記探知覆域算出部は、
同一センサに対する各探知性能値テーブルにおいて、メッシュ配列を複数メッシュのブロック単位に分割し、各ブロックにおける所定位置の1メッシュのみを対象として各テーブルの探知性能値を加算し、
全センサにおいて前記加算値が最も良い値となったメッシュを持つセンサを選択し、
当該選択されたセンサにおいて、該当最良メッシュを含む近傍の複数メッシュを対象として対応する各探知性能値テーブルの探知性能値をそれぞれ加算し、
前記複数メッシュの中から探知性能値の加算値が最良なメッシュを選択してそのメッシュの方位・仰角を前記選択されたセンサの探知覆域の方位・仰角と決定し、
前記決定した方位・仰角に基づいて前記選択されたセンサの距離覆域を算出し、
前記算出した距離覆域と前記決定した方位・仰角に基づいて前記選択されたセンサの覆域形状を算出することを特徴とするセンサ統制システム。
【請求項2】
センサ統制部は、各センサの状態を監視し検出状態を探知覆域算出部に与えており、
前記探知覆域算出部は、前記センサ統制部が無効状態のセンサを検出した場合には、探知性能値格納部で保持していた既存の正常なセンサの探知性能値のみを用いて最適な探知覆域を再計算することを特徴とする請求項1記載のセンサ統制システム。
【請求項3】
探知性能値格納部で保持する探知性能値は、C++のSTLまたはランレングス方式を用いて圧縮されることを特徴とする請求項1または請求項2記載のセンサ統制システム。
【請求項1】
ネットワーク接続された単数または複数のセンサからセンサ諸元を取得し、各センサに対しては探知覆域の設定指示を送るセンサ統制部と、
予め算出した飛翔体の飛翔経路を想定した想定軌道を格納する想定軌道格納部と、
前記想定軌道と前記各センサ諸元に基づいて、センサと想定軌道の組み合わせ毎に、センサが想定軌道に沿って飛翔するより多くの飛翔体をより早く探知可能かを表す指標となる探知性能値を方位×仰角単位毎に算出する探知性能算出部と、
前記センサと想定軌道の組み合わせ毎に算出された探知性能値を前記方位×仰角単位のメッシュ配列にした探知性能値テーブルを保持する探知性能値格納部と、
前記探知性能値テーブルに基づいて、より多くの飛翔体をより早く探知するセンサの探知覆域を算出する探知覆域算出部を備え、
前記探知覆域算出部は、
同一センサに対する各探知性能値テーブルにおいて、メッシュ配列を複数メッシュのブロック単位に分割し、各ブロックにおける所定位置の1メッシュのみを対象として各テーブルの探知性能値を加算し、
全センサにおいて前記加算値が最も良い値となったメッシュを持つセンサを選択し、
当該選択されたセンサにおいて、該当最良メッシュを含む近傍の複数メッシュを対象として対応する各探知性能値テーブルの探知性能値をそれぞれ加算し、
前記複数メッシュの中から探知性能値の加算値が最良なメッシュを選択してそのメッシュの方位・仰角を前記選択されたセンサの探知覆域の方位・仰角と決定し、
前記決定した方位・仰角に基づいて前記選択されたセンサの距離覆域を算出し、
前記算出した距離覆域と前記決定した方位・仰角に基づいて前記選択されたセンサの覆域形状を算出することを特徴とするセンサ統制システム。
【請求項2】
センサ統制部は、各センサの状態を監視し検出状態を探知覆域算出部に与えており、
前記探知覆域算出部は、前記センサ統制部が無効状態のセンサを検出した場合には、探知性能値格納部で保持していた既存の正常なセンサの探知性能値のみを用いて最適な探知覆域を再計算することを特徴とする請求項1記載のセンサ統制システム。
【請求項3】
探知性能値格納部で保持する探知性能値は、C++のSTLまたはランレングス方式を用いて圧縮されることを特徴とする請求項1または請求項2記載のセンサ統制システム。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2009−198212(P2009−198212A)
【公開日】平成21年9月3日(2009.9.3)
【国際特許分類】
【出願番号】特願2008−37722(P2008−37722)
【出願日】平成20年2月19日(2008.2.19)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成21年9月3日(2009.9.3)
【国際特許分類】
【出願日】平成20年2月19日(2008.2.19)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]