
センサ誤差推定装置及び観測装置及び方法及びプログラム
【課題】計測誤差を推定し、推定した計測誤差で計測量を補正する観測装置において、誤差推定の進捗度を正しく見積もる。
【解決手段】誤差推定部130は、距離及び距離変化率観測部112が観測した擬似距離などに基づいて、車速パルス発生器121・ジャイロスコープ122などが計測した速度・角速度などの計測誤差を推定し、推定した計測誤差の推定誤差を算出する。進捗度算出部151は、誤差推定部130が算出した推定誤差に基づいて、誤差推定の進捗度を算出する。
【解決手段】誤差推定部130は、距離及び距離変化率観測部112が観測した擬似距離などに基づいて、車速パルス発生器121・ジャイロスコープ122などが計測した速度・角速度などの計測誤差を推定し、推定した計測誤差の推定誤差を算出する。進捗度算出部151は、誤差推定部130が算出した推定誤差に基づいて、誤差推定の進捗度を算出する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、センサの計測誤差を推定する装置、及び推定した計測誤差による補正をして観測する装置、及びその装置が用いる方法、及びコンピュータを用いてその装置を実現するプログラムに関する。
【背景技術】
【0002】
計測に用いるセンサなどは誤差を有しているので、正確な計測を行うには、センサなどが有する計測誤差を推定し、補正する必要がある。
例えば、測位装置においては、速度・角速度などを計測し、デッドレコニング(Dead Reckoning:自律航法測位)計算により、位置を算出する方法と、GPS(Global Positioning System:全地球測位システム)衛星からのGPS信号に基づいて、GPS衛星までの擬似距離を観測し、位置を算出する方法とがある。また、カルマンフィルタなどを用いて2つの方法を結合することにより、センサなどが有する計測誤差を推定する技術がある。
【特許文献1】特開2006−189320号公報
【特許文献2】特開2005−241517号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
計測誤差の推定結果がどれほど信頼できるかにより、観測結果に対する信頼性も変わってくる。特に、カルマンフィルタを用いた方法では、観測開始直後は推定結果の信頼性が低く、徐々に信頼性が高くなる。しかし、観測開始直後の信頼性が低い期間(センサの初期化期間)がどの程度あるかは、必ずしも明らかではない。
この発明は、例えば、上記のような課題を解決するためになされたものであり、誤差推定がどこまで進んでいるかを計算により見積もることを目的とする。
【課題を解決するための手段】
【0004】
この発明にかかるセンサ誤差推定装置は、
情報を処理する処理装置と、
物理量を計測するセンサと、
上記処理装置を用いて、観測量を示す情報を観測情報として入力し、上記処理装置を用いて、入力した観測情報に基づいて、上記センサの計測誤差を推定し、上記処理装置を用いて、推定した計測誤差の推定誤差を算出し、上記処理装置を用いて、算出した推定誤差を示す情報を推定誤差情報として出力する誤差推定部と、
上記処理装置を用いて、上記誤差推定部が出力した推定誤差情報を入力し、上記処理装置を用いて、入力した推定誤差情報に基づいて、誤差推定の進捗度を算出し、上記処理装置を用いて、算出した進捗度を示す情報を進捗度情報として出力する進捗度算出部と、
を有することを特徴とする。
【発明の効果】
【0005】
この発明にかかるセンサ誤差推定装置によれば、誤差推定部が算出した推定誤差に基づいて、進捗度算出部が誤差推定の進捗度を算出するので、誤差推定の進捗度を計算により見積もることができるという効果を奏する。
【発明を実施するための最良の形態】
【0006】
実施の形態1.
実施の形態1を、図1〜図10を用いて説明する。
【0007】
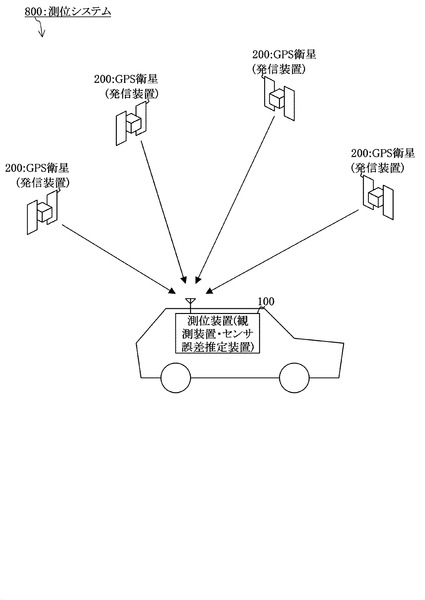
図1は、この実施の形態における測位システム800の全体構成の一例を示すシステム構成図である。
測位装置100は、例えば車両等に搭載し、車両等の現在位置を算出する。測位装置100は、観測装置及びセンサ誤差推定装置の一例である。
測位装置100は、GPS衛星200が発信したGPS信号を受信する。GPS衛星200は、発信装置の一例である。GPS信号は、発信装置が発信した電波の一例である。
測位装置100は、また、搭載された車両等の速度・加速度・角速度などを計測するセンサを有している。
測位装置100は、GPS/センサ複合測位を行う。
すなわち、測位装置100は、センサが計測した速度・加速度・角速度などに基づいて、デッドレコニングにより車両等の位置を算出する。
また、測位装置100は、受信したGPS信号に基づいて、センサ等の誤差を推定し、センサが計測した速度などを補正することにより、正確な位置を算出する。
【0008】
図2は、この実施の形態における測位装置100の外観の一例を示す図である。
測位装置100は、システムユニット910、CRT(Cathode・Ray・Tube)やLCD(液晶)の表示画面を有する表示装置901、キーボード902(Key・Board:K/B)、マウス903、FDD904(Flexible・Disk・Drive)、コンパクトディスク装置905(CDD)、プリンタ装置906、スキャナ装置907などのハードウェア資源を備え、これらはケーブルや信号線で接続されている。
システムユニット910は、コンピュータであり、ファクシミリ機932、電話器931とケーブルで接続され、また、ローカルエリアネットワーク942(LAN)、ゲートウェイ941を介してインターネット940に接続されている。
【0009】
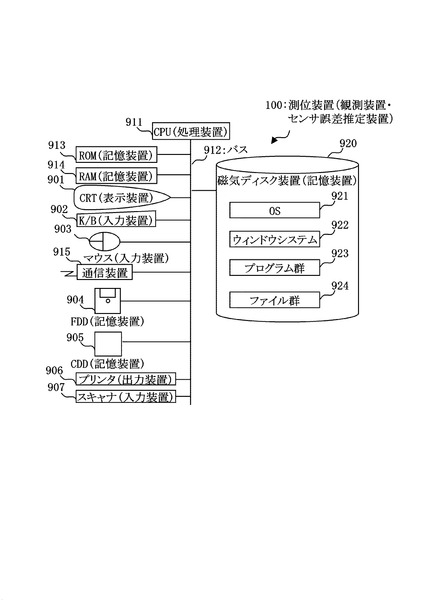
図3は、この実施の形態における測位装置100のハードウェア資源の一例を示す図である。
図3において、測位装置100は、プログラムを実行するCPU911(Central・Processing・Unit、中央処理装置、処理装置、演算装置、マイクロプロセッサ、マイクロコンピュータ、プロセッサともいう)を備えている。CPU911は、バス912を介してROM913、RAM914、通信装置915、表示装置901、キーボード902、マウス903、FDD904、CDD905、プリンタ装置906、スキャナ装置907、磁気ディスク装置920と接続され、これらのハードウェアデバイスを制御する。磁気ディスク装置920の代わりに、光ディスク装置、メモリカード読み書き装置などの記憶装置でもよい。
RAM914は、揮発性メモリの一例である。ROM913、FDD904、CDD905、磁気ディスク装置920の記憶媒体は、不揮発性メモリの一例である。これらは、記憶装置あるいは記憶部の一例である。
通信装置915、キーボード902、スキャナ装置907、FDD904などは、入力部、入力装置の一例である。
また、通信装置915、表示装置901、プリンタ装置906などは、出力部、出力装置の一例である。
【0010】
通信装置915は、ファクシミリ機932、電話器931、LAN942等に接続されている。通信装置915は、LAN942に限らず、インターネット940、ISDN等のWAN(ワイドエリアネットワーク)などに接続されていても構わない。インターネット940或いはISDN等のWANに接続されている場合、ゲートウェイ941は不用となる。
磁気ディスク装置920には、オペレーティングシステム921(OS)、ウィンドウシステム922、プログラム群923、ファイル群924が記憶されている。プログラム群923のプログラムは、CPU911、オペレーティングシステム921、ウィンドウシステム922により実行される。
【0011】
上記プログラム群923には、以下に述べる実施の形態の説明において「〜部」、「〜手段」として説明する機能を実行するプログラムが記憶されている。プログラムは、CPU911により読み出され実行される。
ファイル群924には、以下に述べる実施の形態の説明において、「〜の判定結果」、「〜の計算結果」、「〜の処理結果」として説明する情報やデータや信号値や変数値やパラメータが、「〜ファイル」や「〜データベース」の各項目として記憶されている。「〜ファイル」や「〜データベース」は、ディスクやメモリなどの記録媒体に記憶される。ディスクやメモリになどの記憶媒体に記憶された情報やデータや信号値や変数値やパラメータは、読み書き回路を介してCPU911によりメインメモリやキャッシュメモリに読み出され、抽出・検索・参照・比較・演算・計算・処理・出力・印刷・表示などのCPUの動作に用いられる。抽出・検索・参照・比較・演算・計算・処理・出力・印刷・表示のCPUの動作の間、情報やデータや信号値や変数値やパラメータは、メインメモリやキャッシュメモリやバッファメモリに一時的に記憶される。
また、以下に述べる実施の形態の説明において説明するフローチャートの矢印の部分は主としてデータや信号の入出力を示し、データや信号値は、RAM914のメモリ、FDD904のフレキシブルディスク、CDD905のコンパクトディスク、磁気ディスク装置920の磁気ディスク、その他光ディスク、ミニディスク、DVD(Digital・Versatile・Disc)等の記録媒体に記録される。また、データや信号は、バス912や信号線やケーブルその他の伝送媒体によりオンライン伝送される。
【0012】
また、以下に述べる実施の形態の説明において「〜部」、「〜手段」として説明するものは、「〜回路」、「〜装置」、「〜機器」であってもよく、また、「〜ステップ」、「〜手順」、「〜処理」であってもよい。すなわち、「〜部」、「〜手段」として説明するものは、ROM913に記憶されたファームウェアで実現されていても構わない。或いは、ソフトウェアのみ、或いは、素子・デバイス・基板・配線などのハードウェアのみ、或いは、ソフトウェアとハードウェアとの組み合わせ、さらには、ファームウェアとの組み合わせで実施されても構わない。ファームウェアとソフトウェアは、プログラムとして、磁気ディスク、フレキシブルディスク、光ディスク、コンパクトディスク、ミニディスク、DVD等の記録媒体に記憶される。プログラムはCPU911により読み出され、CPU911により実行される。すなわち、プログラムは、以下に述べる「〜部」、「〜手段」としてコンピュータを機能させるものである。あるいは、以下に述べる「〜部」、「〜手段」の手順や方法をコンピュータに実行させるものである。
【0013】
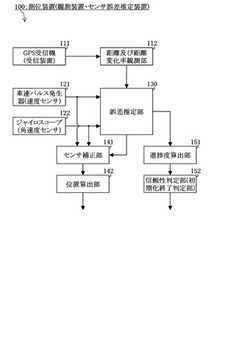
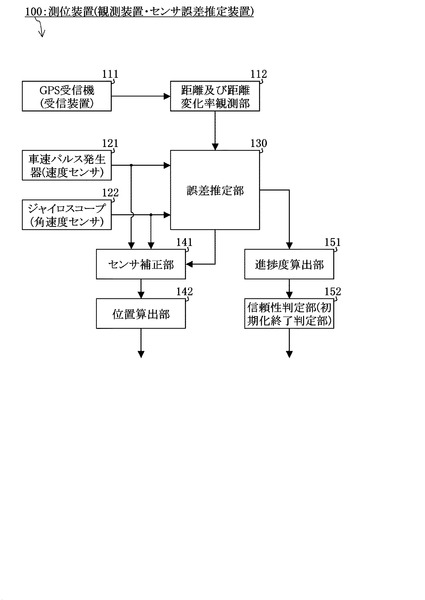
図4は、この実施の形態における測位装置100の機能ブロックの一例を示すブロック構成図である。
測位装置100は、GPS受信機111、距離及び距離変化率観測部112、車速パルス発生器121、ジャイロスコープ122、誤差推定部130、センサ補正部141、位置算出部142、進捗度算出部151、信頼性判定部152を有する。
【0014】
GPS受信機111は、GPS衛星200が発信したGPS信号を受信する。GPS受信機111は、受信装置の一例である。
GPS受信機111は、受信できるGPS信号が複数ある場合には、複数のGPS衛星200がそれぞれ発信した複数のGPS信号を、それぞれ受信する。
【0015】
距離及び距離変化率観測部112は、GPS受信機111が受信したGPS信号に基づいて、GPS衛星までの距離(以下「擬似距離」という。)と、擬似距離の変化率とを算出する。
距離及び距離変化率観測部112は、GPS受信機111が受信したGPS信号が複数ある場合には、GPS受信機111が受信した複数のGPS信号それぞれについて、それぞれのGPS衛星200までの擬似距離及び擬似距離の変化率を算出する。ただし、信頼できる擬似距離及び擬似距離の変化率を算出できないGPS信号については棄却し、擬似距離や擬似距離の変化率を算出しない。
信頼できる擬似距離や擬似距離の変化率が算出できない場合としては、例えば、受信したGPS信号がマルチパスである場合や、GPS衛星200の仰角が低い場合などがある。
距離及び距離変化率観測部112は、これらの条件を判定して、擬似距離や擬似距離の変化率を算出するか否かを決定する。あるいは、距離及び距離変化率観測部112は、擬似距離や擬似距離の変化率を算出したのち、算出した擬似距離や擬似距離の変化率が信頼できるものであるか否かを判断して、棄却してもよい。
距離及び距離変化率観測部112は、算出した擬似距離や擬似距離の変化率を示す情報を距離及び距離変化率情報として出力する。
【0016】
車速パルス発生器121は、測位装置100を搭載した車両等の速度を計測する。車速パルス発生器121は、速度センサの一例である。
車速パルス発生器121は、車速パルスを出力する。車速パルスとは、計測した速度に比例する周波数を有するパルス信号である。車速パルスは、速度情報の一例である。
【0017】
ジャイロスコープ122は、測位装置100を相対した車両等の角速度を計測する。ジャイロスコープ122は、角速度センサの一例である。
ジャイロスコープ122は、計測した角速度に比例する電圧(あるいは、その電圧をアナログデジタル変換した数値を示す情報)を出力する。ジャイロスコープ122が出力する電圧(あるいは数値)は、角速度情報の一例である。
【0018】
誤差推定部130は、CPU911などの処理装置を用いて、距離及び距離変化率観測部112が出力した距離及び距離変化率情報を入力する。
距離及び距離変化率情報は、観測情報の一例である。
誤差推定部130は、CPU911などの処理装置を用いて、車速パルス発生器121が出力した車速パルス(あるいは、車速パルスをCPU911が処理可能な情報に変換した情報)を入力する。
誤差推定部130は、CPU911などの処理装置を用いて、ジャイロスコープ122が出力した電圧(あるいは、電圧をCPU911が処理可能な情報に変換した情報)を入力する。
車速パルスなどの速度情報・角速度情報は、計測情報の一例である。
【0019】
誤差推定部130は、CPU911などの処理装置を用いて、入力した観測情報と計測情報とに基づいて、センサの計測誤差を推定する。
計測誤差とは、センサの計測に伴う誤差である。測位装置100は、誤差推定部130が推定した計測誤差を補正することにより、正確な位置を算出する。
【0020】
例えば、車速パルス発生器121の場合、車速パルス発生器121が出力した車速パルスの周波数に、あらかじめ定められた定数(スケールファクタ)を乗じることにより、車速パルス発生器121が計測した車両等の速度を知ることができる。しかし、車速パルス発生器121のスケールファクタは、周囲の温度や製造時の精度などにより、公称値と異なる値となる場合があるので、正確なスケールファクタを知らなければ、車両等の正確な速度を求めることができない。このようなスケールファクタのずれを、スケールファクタ誤差という。スケールファクタ誤差は、計測誤差の一例である。
【0021】
ジャイロスコープ122の場合も同様に、ジャイロスコープ122が出力した電圧に、あらかじめ定められた定数(スケールファクタ)を乗じることにより、ジャイロスコープ122が計測した角速度を知ることができる。したがって、ジャイロスコープ122にもスケールファクタ誤差が存在する。
また、ジャイロスコープ122は、回転していない状態でも一定の電圧を出力する場合があるので、これも誤差の要因となる。このようなずれをバイアス誤差という。バイアス誤差も、計測誤差の一例である。
【0022】
また、距離及び距離変化率観測部112では、通常、GPS衛星200までの距離及び距離変化率を算出するため、内部に時計を有している。この時計のクロック周波数がずれると、GPS衛星200までの距離や擬似距離の変化率を正確に算出できない。クロックの誤差には、バイアス誤差、ドリフト誤差などがある。バイアス誤差、ドリフト誤差も、計測誤差の一例である。
【0023】
誤差推定部130は、CPU911などの処理装置を用いて、推定した計測誤差を示す情報を、計測誤差情報として出力する。
【0024】
また、誤差推定部130は、CPU911などの処理装置を用いて、推定した計測誤差の推定誤差を算出する。
推定誤差とは、推定した計測誤差と真の計測誤差との間の誤差がどのくらいあるかを示すものである。推定した計測誤差は、真の計測誤差を中心として正規分布すると考えられるので、推定誤差は、その分散(あるいは、2つ以上の推定誤差の間に相関がある場合は共分散)で表わす。
誤差推定部130は、算出した推定誤差を示す情報を、推定誤差情報として出力する。
【0025】
センサ補正部141は、CPU911などの処理装置を用いて、車速パルス発生器121が出力した車速パルスなどの速度情報を入力する。
センサ補正部141は、CPU911などの処理装置を用いて、ジャイロスコープ122が出力した角速度情報を入力する。
センサ補正部141は、CPU911などの処理装置を用いて、誤差推定部130が出力した推定誤差情報を入力する。
センサ補正部141は、CPU911などの処理装置を用いて、入力した速度情報が示す速度を、入力した推定誤差情報が示す推定誤差で補正する。
センサ補正部141は、CPU911などの処理装置を用いて、入力した角速度情報が示す角速度を、入力した推定誤差情報が示す推定誤差で補正する。
センサ補正部141は、CPU911などの処理装置を用いて、補正した物理量を示す情報を、補正計測情報として出力する。
【0026】
位置算出部142は、CPU911などの処理装置を用いて、センサ補正部141が出力した補正計測情報を入力する。
位置算出部142は、CPU911などの処理装置を用いて、入力した補正計測情報に基づいて、現在位置を算出する。
位置算出部142は、CPU911などの処理装置を用いて、算出した現在位置を示す情報を、位置情報として出力する。
位置算出部142が出力した位置情報は、例えば、表示装置901などに表示して利用者等に知らせる。
【0027】
進捗度算出部151は、CPU911などの処理装置を用いて、誤差推定部130が出力した推定誤差情報を入力する。
進捗度算出部151は、CPU911などの処理装置を用いて、入力した推定誤差情報に基づいて、誤差推定の進捗度を算出する。
【0028】
測位装置100が動作を開始した直後は、誤差推定部130は計測誤差を正しく推定できない。距離及び距離変化率情報などの観測情報や、速度情報・角速度情報などの計測情報が集まるにつれて、計測誤差の推定の精度が向上していく。
誤差推定の進捗度は、計測誤差の推定の精度がどのくらいであるかを示すものである。
【0029】
進捗度算出部151は、CPU911などの処理装置を用いて、算出した進捗度を示す情報を、進捗度情報として出力する。
【0030】
信頼性判定部152は、CPU911などの処理装置を用いて、進捗度算出部151が出力した進捗度情報を入力する。
信頼性判定部152は、CPU911などの処理装置を用いて、入力した進捗度情報に基づいて、誤差推定部130の初期化が終わったか否か、すなわち、誤差推定部130が推定した計測誤差が信頼できるか否かを判定する。信頼性判定部152は、初期化終了判定部の一例である。
信頼性判定部152は、CPU911などの処理装置を用いて、判定した判定結果を示す情報を、判定情報として出力する。
【0031】
信頼性判定部152が出力した判定情報は、例えば、表示装置901などに表示して、利用者等に知らせる。
あるいは、位置算出部142が算出した位置情報をマップマッチング(Map Matching:地図照合)する際に利用してもよい。
【0032】
デッドレコニングによる位置算出では、車両等の移動ベクトルを積分して、現在位置を求める。移動ベクトルは、移動速度と移動方向とから求める。移動速度は、速度センサが計測した値である。移動方向は、角速度センサが計測した角速度を積分することにより求める。
したがって、速度センサや角速度センサに計測誤差があると、たとえ微小な誤差でも積分によって誤差が蓄積し、正しい位置算出ができない。
そのため、GPS信号による補正が必要となる。
【0033】
GPS測位は、絶対精度が高いが、受信状態が悪いと測位できない場合があり、連続性が劣っている。そこで、GPS測位とデッドレコニング測位とを複合計算することで、互いの長所を生かした高精度な測位を実現する。
【0034】
一方、センサの計測誤差が正しく推定された後であれば、GPS信号が受信できなくても、ある程度正確な位置算出ができる。これにより、高層ビル街のようなGPS信号の受信状態が悪い状況や、地下のようなGPS信号が受信できない状況であっても、正確な位置算出ができる。
したがって、GPS信号が受信できない状況などになったとき、センサの計測誤差が正しく推定されているか否かにより、位置算出部142が算出する現在位置の信頼性が大きく変わることになる。
【0035】
このため、計測誤差が正しく推定されているか否かを正確に判定することが重要である。
【0036】
次に、誤差推定部130について、詳しく説明する。
【0037】
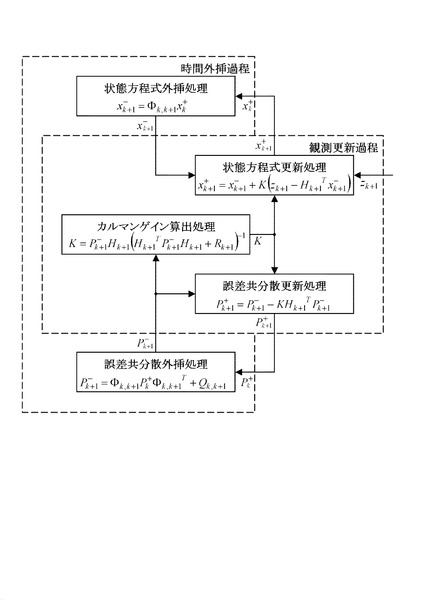
図5は、この実施の形態における誤差推定部130が計測誤差を推定するために用いるカルマンフィルタの動作を示す図である。
【0038】
カルマンフィルタは、離散的に得られる観測値を元に、知りたい状態量を推定するものである。
カルマンフィルタには、大きく分けて、時間外挿過程と観測更新過程との2つの工程がある。
時間外挿過程は、1つ前の状態から、現在の状態を予測する工程である。
観測更新過程は、現在の状態について得られた観測値を元に、真の状態を推定する工程である。
カルマンフィルタは、観測値が得られるたびにこの2つの工程を繰り返し、徐々に推定の精度を上げていく。
【0039】
時間外挿過程には、状態方程式外挿処理と、誤差共分散外挿処理とがある。
【0040】
状態方程式外挿処理とは、1つ前の状態量ベクトル(推定)xk+から、現在の状態量ベクトル(予測)xk+1−を予測する処理である。
状態量の予測には、状態遷移行列Φを用いる。
状態遷移行列Φは、例えば、力学モデルから導き出したものである。
【0041】
誤差共分散外挿処理とは、1つ前の誤差共分散行列(推定)Pk+から、現在の誤差共分散行列(予測)Pk+1−を予測する処理である。
誤差共分散の予測には、状態遷移行列Φと、プロセスノイズ行列Qとを用いる。
状態遷移行列Φは、状態方程式外挿処理で用いたものと同じものである。
プロセスノイズ行列Qは、モデルの時間発展に伴う誤差を示すものである。
【0042】
観測更新過程には、カルマンゲイン算出処理と、状態方程式更新処理と、誤差共分散更新処理とがある。
【0043】
カルマンゲイン算出処理とは、状態量ベクトル(予測)xk+1−を、観測値ベクトルzk+1で補正して、状態量ベクトル(推定)xk+1+を得るための行列であるカルマンゲインKを算出する処理である。
カルマンゲインの算出には、誤差共分散行列(予測)Pk+1−と、観測行列Hと、観測ノイズ行列Rとを用いる。
誤差共分散行列(予測)は、誤差共分散外挿処理で予測したものである。
観測行列Hは、状態量ベクトルxを観測値ベクトルzに変換する行列である。すなわち、状態量ベクトルが示す状態を観測した結果として、観測値ベクトルが示す観測値が得られるという関係を数式化したものである。
観測ノイズ行列Rは、観測に伴う誤差を示すものである。観測ノイズ行列Rが示す観測に伴う誤差は、スケールファクタ誤差などの組織的な観測誤差とは異なり、観測に伴ってランダムに混入する誤差(ノイズ)のことである。
【0044】
状態方程式更新処理とは、状態量ベクトル(予測)xk+1−を、観測値ベクトルzk+1で補正し、状態量ベクトル(推定)xk+1+を推定する処理である。
状態量ベクトルの推定には、カルマンゲインKと、観測行列Hとを用いる。
カルマンゲインKは、カルマンゲイン算出処理で算出したものである。
観測行列Hは、カルマンゲイン算出処理で用いたものと同じものである。
【0045】
誤差共分散更新処理とは、誤差共分散行列(予測)Pk+1−を補正して、誤差共分散行列(推定)Pk+1+を推定する処理である。
誤差共分散行列の推定には、カルマンゲインKと、観測行列Hとを用いる。
カルマンゲインKは、カルマンゲイン算出処理で算出したものである。
観測行列Hは、カルマンゲイン算出処理で用いたものと同じものである。
【0046】
カルマンフィルタは、以上の処理を繰り返すことにより、状態を推定する。
【0047】
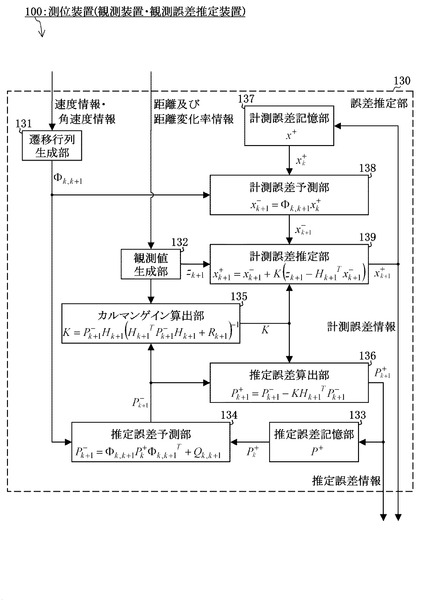
図6は、この実施の形態における誤差推定部130の内部ブロックの構成を示す詳細ブロック図である。
誤差推定部130は、遷移行列生成部131、観測値生成部132、推定誤差記憶部133、推定誤差予測部134、カルマンゲイン算出部135、推定誤差算出部136、計測誤差記憶部137、計測誤差予測部138、計測誤差推定部139を有する。
【0048】
遷移行列生成部131は、CPU911などの処理装置を用いて、時刻k+1における速度情報と角速度情報とを入力する。
遷移行列生成部131は、CPU911などの処理装置を用いて、入力した速度情報と角速度情報に基づいて、時刻kから時刻k+1への状態遷移行列Φk,k+1を生成する。
遷移行列生成部131は、CPU911などの処理装置を用いて、生成した状態遷移行列Φk,k+1を示す情報を出力する。
【0049】
観測値生成部132は、CPU911などの処理装置を用いて、時刻k+1における距離及び距離変化率情報を入力する。
観測値生成部132は、CPU911などの処理装置を用いて、入力した距離及び距離変化率情報に基づいて、時刻k+1における観測値ベクトルzk+1を生成する。
観測値生成部132は、CPU911などの処理装置を用いて、生成した観測値ベクトルzk+1を示す情報を出力する。
【0050】
なお、距離及び距離変化率情報の数が少ない場合には、観測更新過程を処理することができない。そのため、観測値生成部132は、CPU911などの処理装置を用いて、入力した距離及び距離変化率情報の数を、所定の数(例えば2)と比較する。観測値生成部132は、CPU911などの処理装置を用いて、入力した距離及び距離変化率情報の数が所定の数以上である場合のみ、観測値ベクトルzk+1を生成する。
観測値ベクトルzk+1を生成しない場合、観測値生成部132は、CPU911などの処理装置を用いて、観測値ベクトルzk+1を生成しないことを示す情報を出力する。
【0051】
推定誤差記憶部133は、RAM914などの記憶装置を用いて、時刻kにおける誤差共分散行列(推定)Pk+を示す情報を、推定誤差情報として記憶している。
【0052】
推定誤差予測部134は、上述した誤差共分散外挿処理を行う。
推定誤差予測部134は、CPU911などの処理装置を用いて、推定誤差記憶部133が記憶した推定誤差情報を入力する。
推定誤差予測部134は、CPU911などの処理装置を用いて、遷移行列生成部131が出力した状態遷移行列Φk,k+1を示す情報を入力する。
推定誤差予測部134は、CPU911などの処理装置を用いて、入力した情報に基づいて、誤差共分散行列(推定)Pk+、状態遷移行列Φk,k+1から、時刻k+1における誤差共分散行列(予測)Pk+1−を算出する。
推定誤差予測部134は、CPU911などの処理装置を用いて、算出した誤差共分散行列(予測)Pk+1−を示す情報を出力する。
【0053】
カルマンゲイン算出部135は、上述したカルマンゲイン算出処理を行う。
ただし、観測値生成部132が観測値ベクトルzk+1を生成しなかった場合、カルマンゲイン算出部135は、カルマンゲイン算出処理をしない。
観測値生成部132が出力した情報に基づいて、観測値生成部132が観測値ベクトルzk+1を生成したと判断した場合、カルマンゲイン算出部135は、CPU911などの処理装置を用いて、推定誤差予測部134が出力した誤差共分散行列(予測)Pk+1−を示す情報を入力する。
カルマンゲイン算出部135は、CPU911などの処理装置を用いて、入力した情報に基づいて、誤差共分散行列(予測)Pk+1−から、カルマンゲインKを算出する。
カルマンゲイン算出部135は、CPU911などの処理装置を用いて、算出したカルマンゲインKを示す情報を出力する。
【0054】
推定誤差算出部136は、上述した誤差共分散更新処理を行う。
推定誤差算出部136は、CPU911などの処理装置を用いて、推定誤差予測部134が出力した誤差共分散行列(予測)Pk+1−を示す情報を入力する。
【0055】
観測値生成部132が観測値ベクトルzk+1を生成した場合、推定誤差算出部136は、CPU911などの処理装置を用いて、カルマンゲイン算出部135が出力したカルマンゲインKを示す情報を入力する。
推定誤差算出部136は、CPU911などの処理装置を用いて、入力した情報に基づいて、誤差共分散行列(予測)Pk+1−、カルマンゲインKから、時刻k+1における誤差共分散行列(推定)Pk+1+を算出する。
【0056】
観測値生成部132が観測値ベクトルzk+1を生成しなかった場合、推定誤差算出部136は、CPU911などの処理装置を用いて、入力した誤差共分散行列(予測)Pk+1−を、そのまま誤差共分散行列(推定)Pk+1+とする。
【0057】
推定誤差算出部136は、CPU911などの処理装置を用いて、算出した誤差共分散行列(推定)Pk+1+を示す情報を出力する。
【0058】
推定誤差記憶部133は、CPU911などの処理装置を用いて、推定誤差算出部136が出力した誤差共分散行列(推定)Pk+1+を示す情報を入力する。
推定誤差記憶部133は、RAM914などの記憶装置を用いて、入力した情報を推定誤差情報として記憶する。
【0059】
計測誤差記憶部137は、RAM914などの記憶装置を用いて、時刻kにおける状態量ベクトル(推定)xk+を示す情報を、計測誤差情報として記憶している。
【0060】
計測誤差予測部138は、上述した状態方程式外挿処理を行う。
計測誤差予測部138は、CPU911などの処理装置を用いて、計測誤差記憶部137が記憶した計測誤差情報を入力する。
計測誤差予測部138は、CPU911などの処理装置を用いて、遷移行列生成部131が出力した状態遷移行列Φk,k+1を示す情報を入力する。
計測誤差予測部138は、CPU911などの処理装置を用いて、入力した情報に基づいて、状態量ベクトル(推定)xk+、状態遷移行列Φk,k+1から、時刻k+1における状態量ベクトル(予測)xk+1−を算出する。
計測誤差予測部138は、CPU911などの処理装置を用いて、算出した状態量ベクトル(予測)xk+1−を示す情報を出力する。
【0061】
計測誤差推定部139は、上述した状態方程式更新処理を行う。
計測誤差推定部139は、CPU911などの処理装置を用いて、計測誤差予測部138が出力した状態量ベクトルxk+1−を示す情報を入力する。
【0062】
観測値生成部132が観測値ベクトルzk+1を生成した場合、計測誤差推定部139は、観測値生成部132が出力した観測値ベクトルzk+1を示す情報を入力する。
計測誤差推定部139は、CPU911などの処理装置を用いて、カルマンゲイン算出部135が出力したカルマンゲインKを示す情報を入力する。
計測誤差推定部139は、CPU911などの処理装置を用いて、入力した情報に基づいて、状態量ベクトルxk+1−、観測値ベクトルzk+1、カルマンゲインKから、時刻k+1における状態量ベクトル(推定)xk+1+を算出する。
【0063】
観測値生成部132が観測値ベクトルzk+1を生成しなかった場合、計測誤差推定部139は、CPU911などの処理装置を用いて、入力した状態量ベクトル(予測)xk+1−を、そのまま状態量ベクトル(推定)xk+1+とする。
【0064】
計測誤差推定部139は、CPU911などの処理装置を用いて、算出した状態量ベクトル(推定)xk+1+を示す情報を出力する。
【0065】
計測誤差記憶部137は、CPU911などの処理装置を用いて、計測誤差推定部139が出力した状態量ベクトル(推定)xk+1+を示す情報を入力する。
計測誤差記憶部137は、RAM914などの記憶装置を用いて、入力した情報を、計測誤差情報として記憶する。
【0066】
次に、動作について説明する。
【0067】
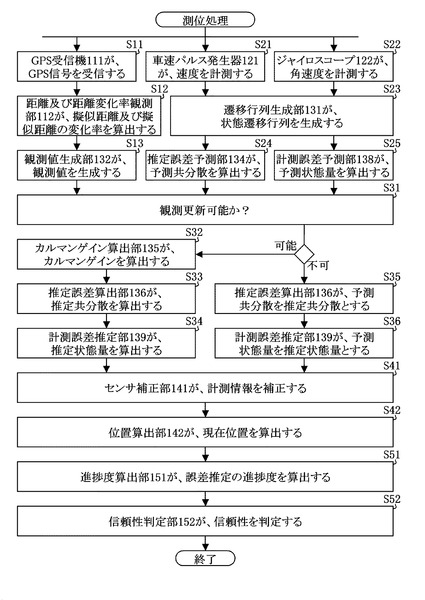
図7は、この実施の形態における測位装置100が現在位置を算出する測位処理の流れの一例を示すフローチャート図である。
【0068】
S11〜S13の処理と、S21〜S25の処理とは、それぞれ独立して並列に動作する。
【0069】
S11において、GPS受信機111は、GPS衛星200が発信したGPS信号を受信する。GPS受信機111は、受信できるGPS信号が複数ある場合には、複数のGPS衛星200が発信した複数のGPS信号をそれぞれ受信する。
【0070】
S12において、距離及び距離変化率観測部112は、S11でGPS受信機111が受信したGPS信号に基づいて、GPS衛星200までの擬似距離及び擬似距離の変化率を算出する。
距離及び距離変化率観測部112は、算出した擬似距離及び擬似距離の変化率を示す情報を、距離及び距離変化率情報として出力する。
距離及び距離変化率観測部112は、GPS受信機111が受信したGPS信号のうち、信頼できる擬似距離及び擬似距離の変化率を算出できるGPS信号についてのみ、距離及び距離変化率情報を出力する。
【0071】
S13において、観測値生成部132は、CPU911などの処理装置を用いて、S12で距離及び距離変化率観測部112が出力した距離及び距離変化率情報を入力する。
観測値生成部132は、CPU911などの処理装置を用いて、入力した距離及び距離変化率情報の数が所定の数(例えば、2)以上である場合、観測値ベクトルzk+1を生成する。
観測値生成部132は、CPU911などの処理装置を用いて、生成した観測値ベクトルzk+1を示す情報を出力する。
【0072】
一方、S21において、車速パルス発生器121は、速度を計測する。
車速パルス発生器121は、計測した速度を示す速度情報を出力する。
【0073】
S22において、ジャイロスコープ122は、角速度を計測する。
ジャイロスコープ122は、計測した角速度を示す角速度情報を出力する。
【0074】
S23において、遷移行列生成部131は、CPU911などの処理装置を用いて、S21で車速パルス発生器121が出力した速度情報と、S22でジャイロスコープ122が出力した角速度情報とを入力する。
遷移行列生成部131は、CPU911などの処理装置を用いて、入力した速度情報と角速度情報とに基づいて、状態遷移行列Φk,k+1を生成する。
遷移行列生成部131は、CPU911などの処理装置を用いて、生成した状態遷移行列Φk,k+1を示す情報を出力する。
【0075】
S24において、推定誤差予測部134は、CPU911などの処理装置を用いて、推定誤差記憶部133が記憶した時刻kにおける誤差共分散行列(推定)Pk+を示す推定誤差情報と、S23で遷移行列生成部131が出力した状態遷移行列Φk,k+1を示す情報とを入力する。
推定誤差予測部134は、CPU911などの処理装置を用いて、入力した情報に基づいて、時刻k+1における誤差共分散行列(予測)Pk+1−=Φk,k+1Pk+Φk,k+1T+Qk,k+1を算出する。
推定誤差予測部134は、CPU911などの処理装置を用いて、算出した誤差共分散行列(予測)Pk+1−を示す情報を出力する。
【0076】
S25において、計測誤差予測部138は、CPU911などの処理装置を用いて、計測誤差記憶部137が記憶した時刻kにおける状態量ベクトルxk+を示す計測誤差情報と、S23で遷移行列生成部131が出力した状態遷移行列Φk,k+1を示す情報とを入力する。
計測誤差予測部138は、CPU911などの処理装置を用いて、入力した情報に基づいて、時刻k+1における状態量ベクトル(予測)xk+1−=Φk,k+1xk+を算出する。
計測誤差予測部138は、CPU911などの処理装置を用いて、算出した状態量ベクトル(予測)xk+1−を示す情報を出力する。
【0077】
S31において、観測更新可能であるか否かに基づいて、処理を分岐する。観測更新可能である場合とは、観測値生成部132が観測値ベクトルzk+1を生成した場合のことである。
観測更新可能な場合には、S32へ進む。
観測更新できない場合には、S35へ進む。
【0078】
S32において、カルマンゲイン算出部135は、CPU911などの処理装置を用いて、S24で推定誤差予測部134が出力した誤差共分散行列(予測)Pk+1−を示す情報を入力する。
カルマンゲイン算出部135は、CPU911などの処理装置を用いて、入力した情報に基づいて、カルマンゲインK=Pk+1−Hk+1(Hk+1TPk+1−Hk+1+Rk+1)−1を算出する。
カルマンゲイン算出部135は、CPU911などの処理装置を用いて、算出したカルマンゲインKを示す情報を出力する。
【0079】
S33において、推定誤差算出部136は、CPU911などの処理装置を用いて、S24で推定誤差予測部134が出力した誤差共分散行列(予測)Pk+1−を示す情報と、S32でカルマンゲイン算出部135が出力したカルマンゲインKを示す情報とを入力する。
推定誤差算出部136は、CPU911などの処理装置を用いて、入力した情報に基づいて、時刻k+1における誤差共分散行列(推定)Pk+1+=Pk+1−−KHk+1TPk+1−を算出する。
推定誤差算出部136は、CPU911などの処理装置を用いて、算出した誤差共分散行列(推定)Pk+1+を示す推定誤差情報を出力する。
推定誤差記憶部133は、CPU911などの処理装置を用いて、推定誤差算出部136が出力した誤差共分散行列(推定)Pk+1+を示す推定誤差情報を入力する。
推定誤差記憶部133は、RAM914などの記憶装置を用いて、入力した推定誤差情報を記憶する。
【0080】
S34において、計測誤差推定部139は、CPU911などの処理装置を用いて、S13で観測値生成部132が出力した観測値ベクトルzk+1を示す情報と、S25で計測誤差予測部138が出力した状態量ベクトル(予測)xk+1−を示す情報と、S32でカルマンゲイン算出部135が出力したカルマンゲインKを示す情報とを入力する。
計測誤差推定部139は、CPU911などの処理装置を用いて、入力した情報に基づいて、時刻k+1における状態量ベクトル(推定)xk+1+=xk+1−+K(zk+1−Hk+1Txk+1−)を算出する。
計測誤差推定部139は、CPU911などの処理装置を用いて、算出した状態量ベクトル(推定)xk+1+を示す計測誤差情報を出力する。
計測誤差記憶部137は、CPU911などの処理装置を用いて、計測誤差推定部139が出力した状態量ベクトル(推定)xk+1+を示す計測誤差情報を入力する。
計測誤差記憶部137は、RAM914などの記憶装置を用いて、入力した計測誤差情報を記憶する。
その後、S41へ進む。
【0081】
一方、S35において、推定誤差算出部136は、CPU911などの処理装置を用いて、S24で推定誤差予測部134が出力した誤差共分散行列(予測)Pk+1−を示す情報を入力する。
推定誤差算出部136は、CPU911などの処理装置を用いて、入力した情報をそのまま、誤差共分散行列(推定)Pk+1+を示す推定誤差情報として出力する。
推定誤差記憶部133は、CPU911などの処理装置を用いて、推定誤差算出部136が出力した誤差共分散行列(推定)Pk+1+を示す推定誤差情報を入力する。
推定誤差記憶部133は、RAM914などの記憶装置を用いて、入力した推定誤差情報を記憶する。
【0082】
S36において、計測誤差推定部139は、CPU911などの処理装置を用いて、S25で計測誤差予測部138が出力した状態量ベクトル(予測)xk+1−を示す情報を入力する。
計測誤差推定部139は、CPU911などの処理装置を用いて、入力した情報をそのまま、状態量ベクトル(推定)xk+1+を示す計測誤差情報として出力する。
計測誤差記憶部137は、CPU911などの処理装置を用いて、計測誤差推定部139が出力した状態量ベクトル(推定)xk+1+を示す計測誤差情報を入力する。
計測誤差記憶部137は、RAM914などの記憶装置を用いて、入力した計測誤差情報を記憶する。
その後、S41へ進む。
【0083】
S41において、センサ補正部141は、CPU911などの処理装置を用いて、S21で車速パルス発生器121が出力した速度情報と、S22でジャイロスコープ122が出力した角速度情報と、S34またはS36で計測誤差推定部139が出力した計測誤差情報とを入力する。
センサ補正部141は、CPU911などの処理装置を用いて、入力した計測誤差情報に基づいて、入力した速度情報が示す速度と角速度情報が示す角速度とを補正する。
センサ補正部141は、CPU911などの処理装置を用いて、補正した速度を示す補正速度情報と、補正した角速度を示す補正角速度情報とを出力する。
【0084】
S42において、位置算出部142は、CPU911などの処理装置を用いて、S41でセンサ補正部141が出力した補正速度情報と、補正角速度情報とを入力する。
位置算出部142は、CPU911などの処理装置を用いて、入力した補正速度情報と補正角速度情報とに基づいて、デッドレコニング処理を行い、現在位置を算出する。
位置算出部142は、CPU911などの処理装置を用いて、算出した現在位置を示す情報を出力する。
【0085】
S51において、進捗度算出部151は、CPU911などの処理装置を用いて、S33またはS35で推定誤差算出部136が出力した推定誤差情報を入力する。
進捗度算出部151は、CPU911などの処理装置を用いて、入力した推定誤差情報に基づいて、誤差推定の進捗度を算出する。
進捗度算出部151は、CPU911などの処理装置を用いて、算出した誤差推定の進捗度を示す進捗度情報を出力する。
【0086】
S52において、信頼性判定部152は、CPU911などの処理装置を用いて、S51で進捗度算出部151が出力した進捗度情報を入力する。
信頼性判定部152は、CPU911などの処理装置を用いて、入力した進捗度情報に基づいて、初期化が終了したか否かを判定する。初期化が終了していればセンサ補正部141が出力した補正速度情報・補正角速度情報などの補正計測情報が信頼できるので、信頼性判定部152は、すなわち、センサ補正部141が出力した補正計測情報が信頼できるか否かを判定する。また、補正計測情報が信頼できれば位置算出部142が出力した位置情報が信頼できるので、信頼性判定部152は、すなわち、位置算出部142が出力した位置情報が信頼できるか否かを判定する。
【0087】
なお、この例では、速度情報及び角速度情報を状態遷移行列Φの生成に使用し、距離及び距離変化率情報から観測値ベクトルzを生成しているが、速度情報及び角速度情報を、観測値ベクトルの生成に使用してもよい。
しかし、GPS信号の受信状態によっては、観測更新に必要な距離及び距離変化率情報が得られない場合がある。速度情報及び角速度情報を観測値ベクトルzの生成に使用すると、観測更新に必要な距離及び距離変化率情報が得られず観測更新ができなかった場合、推定された計測誤差には、計測された速度情報や角速度情報が反映されないことになる。
この例のように、速度情報及び角速度情報を観測値ベクトルzではなく、状態遷移行列Φの生成に使用すると、観測更新に必要な距離及び距離変化率情報が得られない場合でも、ある程度の確度をもって、計測誤差を推定できるので、好ましい。
【0088】
また、この例では、GPS信号から算出した擬似距離及び擬似距離の変化率に基づいて、観測値ベクトルzを生成している(これを「密結合カルマンフィルタ方式」という)が、GPS信号に基づいて位置や速度を算出し、算出した位置や速度に基づいて、観測値ベクトルzを生成してもよい(これを「疎結合カルマンフィルタ方式」という)。
しかし、GPS信号に基づいて位置や速度を算出するためには、3乃至4以上のGPS信号を受信する必要があるのに対し、観測更新に必要な距離及び距離変化率情報は2つ以上(2衛星以上)あればよいので、この例における方式のほうが、利用可能なGPS信号が少ない場合でも、観測更新が可能となり、好ましい。
【0089】
また、この例では、速度情報及び角速度情報に基づくデッドレコニングによる位置算出を主とし、これをGPS信号に基づいて補正しているが、GPS信号に基づく位置算出を主として、デッドレコニングに基づいて補正することとしてもよい。
【0090】
次に、誤差推定の進捗度について説明する。
【0091】
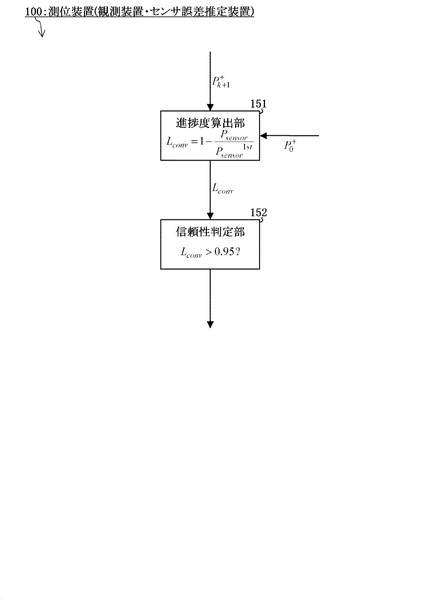
図8は、この実施の形態における進捗度算出部151及び信頼性判定部152を示す図である。
【0092】
進捗度算出部151は、CPU911などの処理装置を用いて、推定誤差算出部136が出力した推定誤差情報を入力する。
推定誤差情報は、推定誤差算出部136が算出した時刻k+1における誤差共分散行列Pk+1+を示す情報である。
誤差共分散行列は、推定した状態量(この場合は計測誤差)と、真の状態量との差(推定誤差)を要素とするベクトルpの外積の期待値〈ppT〉である。
誤差共分散行列の対角要素は、対応する状態量の推定誤差の分散を示す。誤差共分散行列の非対角要素は、対応する2つの状態量の推定誤差の共分散を示し、2つの状態量の推定誤差の間に相関がなければ0となる。
したがって、誤差共分散行列の対角要素の値から、対応する状態量の推定誤差がどの程度あるかを知ることができる。
【0093】
進捗度算出部151は、CPU911などの処理装置を用いて、入力した推定誤差情報に基づいて、誤差推定の進捗度を算出すべき所定の状態量に対応する誤差共分散行列Pk+1+の対角要素の値(推定誤差の分散)Psensorを取得する。
【0094】
推定した状態量が完全に真の状態量と一致し、推定誤差が0になれば、推定誤差の分散は0になる。しかし、実際には、推定した状態量が完全に真の状態量と一致することはないので、誤差推定が進むと、推定誤差の分散は0に近づくが0にはならない。
【0095】
そこで、この実施の形態では、推定誤差の分散Psensorを、推定誤差の分散の初期値Psensor1stと比較することにより、進捗度算出部151が誤差推定の進捗度を算出する。
推定誤差の分散の初期値Psensor1stは、あらかじめ定めたものを、図示していない推定誤差初期値記憶部が、ROM913などの記憶装置を用いて記憶しておく。推定誤差の分散の初期値Psensor1stは、例えば、車速パルス発生器121の仕様書に記載の精度・誤差などに基づいて算出する。推定誤差の分散の初期値Psensor1stは、観測開始時(時刻k=0)に推定誤差記憶部133が記憶している誤差共分散行列P0+の要素である。
【0096】
進捗度算出部151は、CPU911などの処理装置を用いて、誤差推定の進捗度を算出すべき所定の状態量に対応する推定誤差の分散の初期値Psensor1st(誤差共分散行列の要素の初期値)を示す情報を入力する。
進捗度算出部151は、CPU911などの処理装置を用いて、入力した情報が示す推定誤差の分散Psensorと、推定誤差の分散の初期値Psensor1stとに基づいて、誤差推定の進捗度Lconvを算出する。
【0097】
この実施の形態では、誤差推定の進捗度Lconvを、Lconv=1−Psensor/Psensor1stと定義する。進捗度算出部151は、CPU911などの処理装置を用いて、誤差推定の進捗度Lconv=1−Psensor/Psensor1stを算出する。
この式は、推定誤差の分散Psensorが初期値Psensor1stから比較してどこまで小さくなっているかを示すものであり、Psensorが初期値のままであれば推定誤差の進捗度(収束度合い)Lconv=0となる。逆に最大限に収束してPsensor=0となれば、Lconv=1となる。
したがって、誤差推定の進捗度Lconvは、0〜1の間の値をとり、大きいほど誤差推定が進んでいることを示す。
【0098】
進捗度算出部151は、CPU911などの処理装置を用いて、算出した誤差推定の進捗度Lconvを示す進捗度情報を出力する。信頼性判定部152は、CPU911などの処理装置を用いて、進捗度算出部151が出力した進捗度情報を入力する。
【0099】
上述したように、推定誤差の分散Psensorが完全に0になることはないので、誤差推定が進むと進捗度Lconvは1に近づくが、1にはならない。
そこで、信頼性判定部152は、進捗度Lconvを所定の閾値(例えば0.95)と比較することにより、誤差推定の信頼性を判定する。
すなわち、信頼性判定部152は、CPU911などの処理装置を用いて、入力した進捗度情報が示す進捗度Lconvと所定の閾値とを比較して、進捗度Lconvが所定の閾値より大きい場合に、センサの初期化が終了したと判定する。
【0100】
「センサの初期化」とは、すなわち、車速パルス発生器121、ジャイロスコープ122などの計測誤差が正しく推定できたことをいう。
観測開始時には、計測誤差がどれほどあるかわからない。その後、カルマンフィルタにより、速度情報や角速度情報などの計測情報と、受信したGPS信号に基づく距離及び距離変化率情報などの観測情報とから、それぞれの計測誤差が推定できる。
ひとたび正しい計測誤差が推定できれば、その後GPS信号の受信状態が悪くなっても、計測誤差がわかっているので、速度情報や角速度情報などだけに基づいて位置を算出しても、大きく間違うことはなく、正確な位置が算出できる。
GPS信号が受信できない状態が長く続くと、推定した計測誤差が真の計測誤差からすこしずつ離れていく場合もあるが、GPS信号が受信できれば、すぐに真の計測誤差に追随することができるので、推定した計測誤差が真の計測誤差から大きく離れることはない。
したがって、計測開始後、最初に進捗度Lconvが所定の閾値を超えるまでの期間を、センサの初期化の期間と呼ぶ。
【0101】
次に、この実施の形態における測位装置100を用いた実験結果について説明する。
【0102】
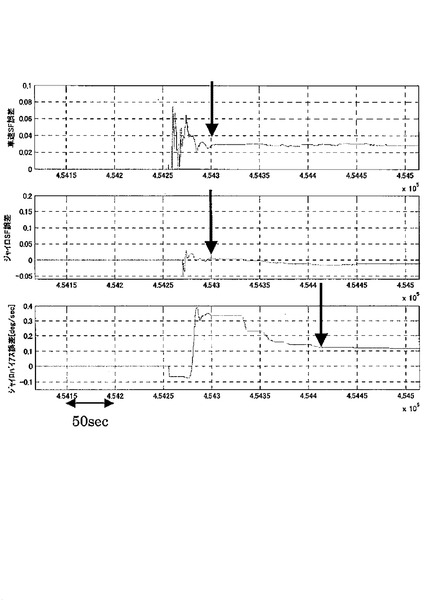
図9は、この実施の形態における測位装置100による計測誤差推定の実験結果を示すグラフ図である。
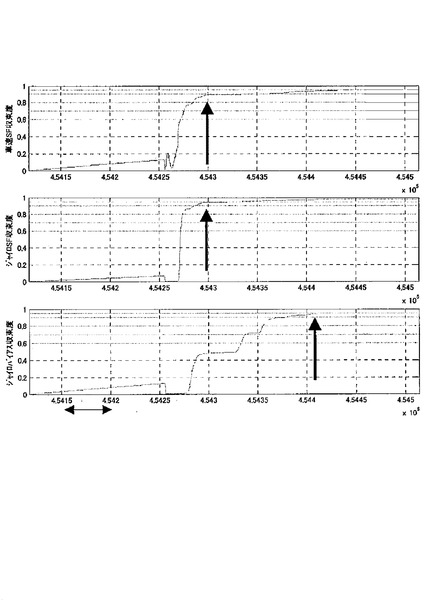
図10は、図9に示した実験において、進捗度算出部151が算出した誤差推定の進捗度を示すグラフ図である。
【0103】
図9及び図10において、横軸は共に時刻を示し、一目盛は50秒である。
図9において、縦軸は誤差推定部130が推定した計測誤差を示す。
一番上のグラフは、車速パルス発生器121のスケールファクタ誤差について推定した計測誤差である。
真ん中のグラフは、ジャイロスコープ122のスケールファクタ誤差について推定した計測誤差である。
一番下のグラフは、ジャイロスコープ122のバイアス誤差について推定した計測誤差である。
図10において、縦軸は誤差推定の進捗度(収束度)を示す。
一番上のグラフは、車速パルス発生器121のスケールファクタ誤差についての誤差推定の進捗度である。
真ん中のグラフは、ジャイロスコープ122のスケールファクタ誤差についての誤差推定の進捗度である。
一番下のグラフは、ジャイロスコープ122のバイアス誤差についての誤差推定の進捗度である。
【0104】
図9において、車速パルス発生器121のスケールファクタ誤差及びジャイロスコープ122のスケールファクタ誤差は、時刻4.543付近で一定値に収束している。また、ジャイロスコープ122のバイアス誤差は、時刻4.544付近で一定値に収束している。
一方、図10において、推定した計測誤差が一定値に収束するのとほぼ同じタイミングで、進捗度が1に近づいており、進捗度の定義が妥当であることがわかる。
【0105】
特に注目すべき点は、ジャイロスコープ122のバイアス誤差について推定した計測誤差は、階段状に変化しており、時刻4.543付近で、一定値に収束したかに見える。
しかし、この時点での進捗度は0.5程度であるから、センサの初期化が終了していないことがわかる。
【0106】
この実施の形態における測位装置100(センサ誤差推定装置)は、
情報を処理するCPU911などの処理装置と、物理量(速度・角速度)を計測するセンサ(車速パルス発生器121・ジャイロスコープ122)と、誤差推定部130と、進捗度算出部151とを有し、
誤差推定部130は、
CPU911などの処理装置を用いて、観測量(擬似距離及び擬似距離の変化率)を示す情報(距離及び距離変化率情報)を観測情報として入力し、
CPU911などの処理装置を用いて、入力した観測情報(距離及び距離変化率情報)に基づいて、センサ(車速パルス発生器121・ジャイロスコープ122)の計測誤差を推定し、
CPU911などの処理装置を用いて、推定した計測誤差の推定誤差を算出し、
CPU911などの処理装置を用いて、算出した推定誤差を示す情報を推定誤差情報として出力し、
進捗度算出部151は、
CPU911などの処理装置を用いて、誤差推定部130が出力した推定誤差情報を入力し、
CPU911などの処理装置を用いて、入力した推定誤差情報に基づいて、誤差推定の進捗度Lconvを算出し、
CPU911などの処理装置を用いて、算出した進捗度Lconvを示す情報を進捗度情報として出力することを特徴とする。
【0107】
この実施の形態における測位装置100(センサ誤差推定装置)によれば、誤差推定部130が算出した推定誤差に基づいて、進捗度算出部151が誤差推定の進捗度Lconvを算出するので、誤差推定の進捗度を計算により見積もることができるという効果を奏する。
【0108】
この実施の形態における測位装置100(センサ誤差推定装置)は、
誤差推定部130が、
CPU911などの処理装置を用いて、カルマンフィルタを用いて計測誤差xk+1+を推定し、
CPU911などの処理装置を用いて、カルマンフィルタが算出する誤差共分散行列Pk+1+を示す情報を推定誤差情報として出力することを特徴とする。
【0109】
この実施の形態における測位装置100(センサ誤差推定装置)によれば、カルマンフィルタを用いて計測誤差を推定する誤差推定部130が、計測誤差を推定するために算出する誤差共分散行列Pk+1+に基づいて、進捗度算出部151が誤差推定の進捗度Lconvを算出するので、進捗度算出のための計算量が少なく、CPU911などの処理装置の資源を有効に活用できるという効果を奏する。
【0110】
この実施の形態における測位装置100(センサ誤差推定装置)は、
進捗度算出部151が、
入力した推定誤差情報が示す誤差共分散行列Pk+1+の要素のうち、少なくとも一つの要素について、CPU911などの処理装置を用いて、上記要素の値(推定誤差の分散)Psensorと上記要素の初期値(推定誤差の分散の初期値)Psensor1stとに基づいて、誤差推定の進捗度Lconvを算出することを特徴とする。
【0111】
この実施の形態における測位装置100(センサ誤差推定装置)によれば、進捗度算出部151が、誤差共分散行列Pk+1+の要素のうち、少なくとも一つの要素について、上記要素の値と、上記要素の初期値とに基づいて、誤差推定の進捗度Lconvを算出するので、誤差推定の進捗度を正しく見積もることができるという効果を奏する。
【0112】
この実施の形態における測位装置100(センサ誤差推定装置)は、
進捗度算出部151が、
CPU911などの処理装置を用いて、上記要素の値(推定誤差の分散)Psensorと上記要素の初期値(推定誤差の分散の初期値)Psensor1stとに基づいて、誤差推定の進捗度Lconv=1−Psensor/Psensor1stを算出することを特徴とする。
【0113】
この実施の形態における測位装置100(センサ誤差推定装置)によれば、進捗度算出部151が、Lconv=1−Psennsor/Psensor1stを算出することにより誤差推定の進捗度を算出するので、簡単な計算で進捗度を算出でき、CPU911などの処理装置の資源を有効に活用できるという効果を奏する。
【0114】
この実施の形態における測位装置100(センサ誤差推定装置)は、更に、
初期化終了判定部(信頼性判定部152)を有し、
初期化終了判定部(信頼性判定部152)は、
CPU911などの処理装置を用いて、進捗度算出部151が出力した進捗度情報を入力し、
CPU911などの処理装置を用いて、入力した進捗度情報が示す進捗度Lconvと所定の閾値とを比較して、進捗度Lconvが所定の閾値より大きい場合に、初期化が終了したと判定することを特徴とする。
【0115】
この実施の形態における測位装置100(センサ誤差推定装置)によれば、進捗度算出部151が算出した誤差推定の進捗度Lconvが所定の閾値より大きい場合に、信頼性判定部152が初期化が終了したと判定するので、センサの初期化が終了したか否かを、簡単に判定できるという効果を奏する。
【0116】
この実施の形態における測位装置100(センサ誤差推定装置)は、更に、
受信装置(GPS受信機111)と、距離及び距離変化率観測部112とを有し、
受信装置(GPS受信機111)は、
発信装置(GPS衛星200)が発信した電波(GPS信号)を受信し、
距離及び距離変化率観測部112は、
受信装置(GPS受信機111)が受信した電波(GPS信号)に基づいて、発信装置(GPS衛星200)までの距離(擬似距離)及び距離変化率(擬似距離の変化率)を算出し、算出した距離(擬似距離)及び距離変化率(擬似距離の変化率)を示す情報を距離及び距離変化率情報として出力し、
誤差推定部130は、
CPU911などの処理装置を用いて、距離及び距離変化率観測部112が出力した距離及び距離変化率情報を、観測情報として入力することを特徴とする。
【0117】
この実施の形態における測位装置100(センサ誤差推定装置)によれば、受信装置(GPS受信機111)が受信した電波(GPS信号)に基づいて距離及び距離変化率観測部112が算出した擬似距離及び擬似距離の変化率に基づいて、誤差推定部130が計測誤差を推定し、進捗度算出部151が進捗度を算出するので、推定したセンサの観測計測誤差が信頼できるか否かを判定できるという効果を奏する。
【0118】
この実施の形態における測位装置100(センサ誤差推定装置)は、
速度センサ(車速パルス発生器121)を有し、
速度センサ(車速パルス発生器121)は、
速度を計測し、計測した速度を示す情報を、速度情報として出力し、
誤差推定部130は、
CPU911などの処理装置を用いて、速度センサ(車速パルス発生器121)が出力した速度情報を、計測情報として入力し、
CPU911などの処理装置を用いて、速度センサ(車速パルス発生器121)のスケールファクタ誤差を推定することを特徴とする。
【0119】
この実施の形態における測位装置100(センサ誤差推定装置)によれば、速度センサ(車速パルス発生器121)が計測した速度について、誤差推定部130がスケールファクタ誤差を推定し、進捗度算出部151が進捗度を算出するので、推定したスケールファクタ誤差が信頼できるか否かを判定できるという効果を奏する。
【0120】
この実施の形態における測位装置100(センサ誤差推定装置)は、
角速度センサ(ジャイロスコープ122)を有し、
角速度センサ(ジャイロスコープ122)は、
角速度を計測し、計測した角速度を示す情報を、角速度情報として出力し、
誤差推定部130は、
CPU911などの処理装置を用いて、角速度センサ(ジャイロスコープ122)が出力した角速度情報を、計測情報として入力し、
CPU911などの処理装置を用いて、角速度センサ(ジャイロスコープ122)のスケールファクタ誤差及びバイアス誤差の少なくともいずれかを推定することを特徴とする。
【0121】
この実施の形態における測位装置100(センサ誤差推定装置)によれば、角速度センサ(ジャイロスコープ122)が計測した角速度について、誤差推定部130がスケールファクタ誤差及びバイアス誤差の少なくともいずれかを推定し、進捗度算出部151が進捗度を算出するので、推定したスケールファクタ誤差またはバイアス誤差が信頼できるか否かを判定できるという効果を奏する。
【0122】
この実施の形態における測位装置100(観測装置)は、
情報を処理するCPU911などの処理装置と、センサ(車速パルス発生器121・ジャイロスコープ122)と、誤差推定部130と、進捗度算出部151と、センサ補正部141と、信頼性判定部152とを有し、
センサ(車速パルス発生器121・ジャイロスコープ122)は、
物理量(速度・角速度)を計測し、計測した物理量(速度・角速度)を示す情報を、計測情報(速度情報・角速度情報)として出力し、
誤差推定部130は、
CPU911などの処理装置を用いて、観測量(擬似距離及び擬似距離の変化率)を示す情報を観測情報として入力し、
CPU911などの処理装置を用いて、センサ(車速パルス発生器121・ジャイロスコープ122)が出力した計測情報を入力し、
CPU911などの処理装置を用いて、入力した観測情報(距離及び距離変化率情報)と入力した計測情報(速度情報・角速度情報)とに基づいて、センサ(車速パルス発生器121・ジャイロスコープ122)の計測誤差を推定し、
CPU911などの処理装置を用いて、推定した計測誤差を示す情報を計測誤差情報として出力し、
CPU911などの処理装置を用いて、推定した計測誤差の推定誤差を算出し、
CPU911などの処理装置を用いて、算出した推定誤差を示す情報を推定誤差情報として出力し、
進捗度算出部151は、
CPU911などの処理装置を用いて、誤差推定部130が出力した推定誤差情報を入力し、
CPU911などの処理装置を用いて、入力した推定誤差情報に基づいて、誤差推定の進捗度Lconvを算出し、
CPU911などの処理装置を用いて、算出した進捗度を示す情報を進捗度情報として出力し、
センサ補正部141は、
CPU911などの処理装置を用いて、計測情報(速度情報・角速度情報)と、誤差推定部130が出力した計測誤差情報とを入力し、
CPU911などの処理装置を用いて、入力した計測情報(速度情報・角速度情報)が示す物理量(速度・角速度)を、入力した計測誤差情報が示す計測誤差で補正し、
CPU911などの処理装置を用いて、補正した物理量(速度・角速度)を示す情報(補正速度情報・補正角速度情報)を補正計測情報として出力し、
信頼性判定部152は、
CPU911などの処理装置を用いて、進捗度算出部151が出力した進捗度情報を入力し、
CPU911などの処理装置を用いて、入力した進捗度情報が示す進捗度Lconvに基づいて、センサ補正部141が出力した補正計測情報が信頼できるか否かを判定することを特徴とする。
【0123】
この実施の形態における測位装置100(観測装置)によれば、進捗度算出部151が算出した進捗度Lconvに基づいて、信頼性判定部152が補正計測情報の信頼性を判定するので、補正計測情報が信頼できるか否かを正しく判定できるという効果を奏する。
【0124】
この実施の形態における測位装置100(観測装置)は、
誤差推定部130と、進捗度算出部151と、信頼性判定部152とを有し、
誤差推定部130は、
CPU911などの処理装置を用いて、カルマンフィルタを用いて計測誤差xk+1+を推定し、
CPU911などの処理装置を用いて、カルマンフィルタが算出する誤差共分散行列Pk+1+を示す情報を推定誤差情報として出力し、
進捗度算出部151は、
入力した推定誤差情報が示す誤差共分散行列Pk+1+の要素のうち、少なくとも一つの要素について、CPU911などの処理装置を用いて、上記要素の値Psensorと上記要素の初期値Psensor1stとに基づいて、誤差推定の進捗度Lconv=1−Psensor/Psensor1stを算出し、
信頼性判定部152は、
CPU911などの処理装置を用いて、入力した進捗度情報が示す進捗度Lconvと所定の閾値とを比較して、進捗度Lconvが所定の閾値より大きい場合に、センサ補正部141が出力した補正計測情報が信頼できると判定することを特徴とする。
【0125】
この実施の形態における測位装置100(観測装置)によれば、信頼性判定部152が、進捗度と所定の閾値とを比較して、補正計測情報の信頼性を判定するので、簡単な計算で信頼性を判定でき、CPU911などの処理装置の資源を有効に活用できるという効果を奏する。
【0126】
この実施の形態におえる測位装置100(観測装置)は、更に、
受信装置(GPS受信機111)と、距離及び距離変化率観測部112と、速度センサ(車速パルス発生器121)と、角速度センサ(ジャイロスコープ122)と、位置算出部142とを有し、
受信装置(GPS受信機111)は、
発信装置(GPS衛星200)が発信した電波(GPS信号)を受信し、
距離及び距離変化率観測部112は、
受信装置(GPS受信機111)が受信した電波(GPS信号)に基づいて、発信装置(GPS衛星200)までの距離(擬似距離)及び距離変化率(擬似距離の変化率)を算出し、算出した距離(擬似距離)及び距離変化率(擬似距離の変化率)を示す情報を距離及び距離変化率情報として出力し、
速度センサ(車速パルス発生器121)は、
速度を計測し、計測した速度を示す情報を、速度情報として出力し、
各速度センサ(ジャイロスコープ122)は、
角速度を計測し、計測した角速度を示す情報を、角速度情報として出力し、
誤差推定部130は、
CPU911などの処理装置を用いて、距離及び距離変化率観測部112が出力した距離及び距離変化率情報と、速度センサ(車速パルス発生器121)が出力した速度情報と、角速度センサ(ジャイロスコープ122)が出力した角速度情報とを、計測情報として入力し、
CPU911などの処理装置を用いて、速度センサ(車速パルス発生器121)のスケールファクタ誤差と、角速度センサ(ジャイロスコープ122)のスケールファクタ誤差及びバイアス誤差とを推定し、
センサ補正部141は、
CPU911などの処理装置を用いて、速度情報が示す速度と上記角速度情報が示す角速度とを、誤差推定部130が推定したスケールファクタ誤差及びバイアス誤差で補正し、
位置算出部142は、
CPU911などの処理装置を用いて、センサ補正部141が出力した補正計測情報を入力し、
CPU911などの処理装置を用いて、入力した補正計測情報に基づいて、現在位置を算出することを特徴とする。
【0127】
この実施の形態における測位装置100(観測装置)によれば、センサ補正部141が補正した補正計測情報に基づいて、位置算出部142が位置を算出し、信頼性判定部152が信頼性を判定するので、位置算出部142が算出した現在位置が信頼できるか否かを判定できるという効果を奏する。
【0128】
この実施の形態における測位装置100(センサ誤差推定装置)が計測誤差を推定する方法は、
情報を処理するCPU911などの処理装置と、物理量を計測するセンサ(車速パルス発生器121・ジャイロスコープ122)とを有するセンサ誤差推定装置(測位装置100)が計測誤差を推定する方法において、
CPU911などの処理装置が、観測量(擬似距離及び擬似距離の変化率)を示す情報(距離及び距離変化率情報)を観測情報として入力し、
CPU911などの処理装置が、上記センサ(車速パルス発生器121・ジャイロスコープ122)が計測した物理量(速度・角速度)を示す情報(速度情報・角速度情報)を計測情報として入力し、
CPU911などの処理装置が、入力した観測情報(距離及び距離変化率情報)と入力した計測情報とに基づいて、上記センサの計測誤差を推定し、
CPU911などの処理装置が、推定した計測誤差の推定誤差を算出し、
CPU911などの処理装置が、算出した推定誤差に基づいて、誤差推定の進捗度Lconvを算出し、
CPU911などの処理装置が、算出した進捗度Lconvを示す情報を進捗度情報として出力することを特徴とする。
【0129】
この実施の形態における方法によれば、CPU911などの処理装置が、センサの計測誤差を推定し、推定した計測誤差の推定誤差を算出し、算出した推定誤差に基づいて、誤差推定の進捗度Lconvを算出するので、誤差推定の進捗度を計算により見積もることができるという効果を奏する。
【0130】
この実施の形態における測位装置100(観測装置)が観測する方法は、
情報を処理するCPU911などの処理装置と、物理量を計測するセンサ(車速パルス発生器121・ジャイロスコープ122)とを有する観測装置(測位装置100)が観測する方法において、
CPU911などの処理装置が、観測量(擬似距離及び擬似距離の変化率)を示す情報(距離及び距離変化率情報)を観測情報として入力し、
CPU911などの処理装置が、上記センサ(車速パルス発生器121・ジャイロスコープ122)が計測した物理量(速度・角速度)を示す情報(速度情報・角速度情報)を計測情報として入力し、
CPU911などの処理装置が、入力した観測情報(距離及び距離変化率情報)と計測情報(速度情報・角速度情報)とに基づいて、上記センサ(車速パルス発生器121・ジャイロスコープ122)の計測誤差を推定し、
CPU911などの処理装置が、推定した計測誤差の推定誤差を算出し、
CPU911などの処理装置が、算出した推定誤差に基づいて、誤差推定の進捗度Lconvを算出し、
CPU911などの処理装置が、入力した計測情報が示す物理量(速度・角速度)を、推定した計測誤差で補正し、
CPU911などの処理装置が、補正した物理量(速度・角速度)を示す情報を補正計測情報として出力し、
CPU911などの処理装置が、算出した誤差推定の進捗度Lconvに基づいて、出力した補正計測情報が信頼できるか否かを判定することを特徴とする。
【0131】
この実施の形態における方法によれば、CPU911などの処理装置が、センサの計測誤差を推定し、推定した計測誤差の推定誤差を算出し、算出した推定誤差に基づいて、誤差推定の進捗度Lconvを算出し、算出した誤差推定の進捗度Lconvに基づいて、補正計測情報の信頼性を判定するので、補正計測情報の信頼性を正しく判定できるという効果を奏する。
【0132】
この実施の形態における測位装置100は、情報を処理するCPU911などの処理装置を有するコンピュータをこの実施の形態における測位装置100として機能させるプログラムを、上記コンピュータが実行することにより、実現することができる。
【0133】
この実施の形態におけるプログラムは、
情報を処理するCPU911などの処理装置を有するコンピュータを、この実施の形態における測位装置100(センサ誤差推定装置)として機能させることを特徴とする。
【0134】
この実施の形態におけるプログラムによれば、誤差推定の進捗度を、コンピュータによる計算により見積もることができるという効果を奏する。
【0135】
この実施の形態におけるプログラムは、
情報を処理するCPU911などの処理装置を有するコンピュータを、この実施の形態における測位装置100(観測装置)として機能させることを特徴とする。
【0136】
この実施の形態におけるプログラムによれば、補正計測情報の信頼性を、コンピュータによる計算により判定できるという効果を奏する。
【0137】
この実施の形態における測位装置100(GPS/センサ複合演算測位装置)は、センサ誤差推定計算の収束状況を計算により見積もることを特徴とする。
これにより、GPS/センサ複合演算測位装置において、ジャイロ、車速パルス、加速度センサなどのセンサの誤差推定(初期化)の進行度を計算できる。
また、初期化の進行状況を見積もることができるので、現在のセンサデータの信頼度を推定でき、測位結果の信頼度を推定できる。
【図面の簡単な説明】
【0138】
【図1】実施の形態1における測位システム800の全体構成の一例を示すシステム構成図。
【図2】実施の形態1における測位装置100の外観の一例を示す図。
【図3】実施の形態1における測位装置100のハードウェア資源の一例を示す図。
【図4】実施の形態1における測位装置100の機能ブロックの一例を示すブロック構成図。
【図5】実施の形態1における誤差推定部130が計測誤差を推定するために用いるカルマンフィルタの動作を示す図。
【図6】実施の形態1における誤差推定部130の内部ブロックの構成を示す詳細ブロック図。
【図7】実施の形態1における測位装置100が現在位置を算出する測位処理の流れの一例を示すフローチャート図。
【図8】実施の形態1における進捗度算出部151及び信頼性判定部152を示す図。
【図9】実施の形態1における測位装置100による計測誤差推定の実験結果を示すグラフ図。
【図10】図9に示した実験において、進捗度算出部151が算出した誤差推定の進捗度を示すグラフ図。
【符号の説明】
【0139】
100 測位装置、111 GPS受信機、112 距離及び距離変化率観測部、121 車速パルス発生器、122 ジャイロスコープ、130 誤差推定部、131 遷移行列生成部、132 観測値生成部、133 推定誤差記憶部、134 推定誤差予測部、135 カルマンゲイン算出部、136 推定誤差算出部、137 計測誤差記憶部、138 計測誤差予測部、139 計測誤差推定部、141 センサ補正部、142 位置算出部、151 進捗度算出部、152 信頼性判定部、200 GPS衛星、800 測位システム、901 表示装置、902 キーボード、903 マウス、904 FDD、905 CDD、906 プリンタ装置、907 スキャナ装置、910 システムユニット、911 CPU、912 バス、913 ROM、914 RAM、915 通信装置、920 磁気ディスク装置、921 OS、922 ウィンドウシステム、923 プログラム群、924 ファイル群、931 電話器、932 ファクシミリ機、940 インターネット、941 ゲートウェイ、942 LAN。
【技術分野】
【0001】
この発明は、センサの計測誤差を推定する装置、及び推定した計測誤差による補正をして観測する装置、及びその装置が用いる方法、及びコンピュータを用いてその装置を実現するプログラムに関する。
【背景技術】
【0002】
計測に用いるセンサなどは誤差を有しているので、正確な計測を行うには、センサなどが有する計測誤差を推定し、補正する必要がある。
例えば、測位装置においては、速度・角速度などを計測し、デッドレコニング(Dead Reckoning:自律航法測位)計算により、位置を算出する方法と、GPS(Global Positioning System:全地球測位システム)衛星からのGPS信号に基づいて、GPS衛星までの擬似距離を観測し、位置を算出する方法とがある。また、カルマンフィルタなどを用いて2つの方法を結合することにより、センサなどが有する計測誤差を推定する技術がある。
【特許文献1】特開2006−189320号公報
【特許文献2】特開2005−241517号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
計測誤差の推定結果がどれほど信頼できるかにより、観測結果に対する信頼性も変わってくる。特に、カルマンフィルタを用いた方法では、観測開始直後は推定結果の信頼性が低く、徐々に信頼性が高くなる。しかし、観測開始直後の信頼性が低い期間(センサの初期化期間)がどの程度あるかは、必ずしも明らかではない。
この発明は、例えば、上記のような課題を解決するためになされたものであり、誤差推定がどこまで進んでいるかを計算により見積もることを目的とする。
【課題を解決するための手段】
【0004】
この発明にかかるセンサ誤差推定装置は、
情報を処理する処理装置と、
物理量を計測するセンサと、
上記処理装置を用いて、観測量を示す情報を観測情報として入力し、上記処理装置を用いて、入力した観測情報に基づいて、上記センサの計測誤差を推定し、上記処理装置を用いて、推定した計測誤差の推定誤差を算出し、上記処理装置を用いて、算出した推定誤差を示す情報を推定誤差情報として出力する誤差推定部と、
上記処理装置を用いて、上記誤差推定部が出力した推定誤差情報を入力し、上記処理装置を用いて、入力した推定誤差情報に基づいて、誤差推定の進捗度を算出し、上記処理装置を用いて、算出した進捗度を示す情報を進捗度情報として出力する進捗度算出部と、
を有することを特徴とする。
【発明の効果】
【0005】
この発明にかかるセンサ誤差推定装置によれば、誤差推定部が算出した推定誤差に基づいて、進捗度算出部が誤差推定の進捗度を算出するので、誤差推定の進捗度を計算により見積もることができるという効果を奏する。
【発明を実施するための最良の形態】
【0006】
実施の形態1.
実施の形態1を、図1〜図10を用いて説明する。
【0007】
図1は、この実施の形態における測位システム800の全体構成の一例を示すシステム構成図である。
測位装置100は、例えば車両等に搭載し、車両等の現在位置を算出する。測位装置100は、観測装置及びセンサ誤差推定装置の一例である。
測位装置100は、GPS衛星200が発信したGPS信号を受信する。GPS衛星200は、発信装置の一例である。GPS信号は、発信装置が発信した電波の一例である。
測位装置100は、また、搭載された車両等の速度・加速度・角速度などを計測するセンサを有している。
測位装置100は、GPS/センサ複合測位を行う。
すなわち、測位装置100は、センサが計測した速度・加速度・角速度などに基づいて、デッドレコニングにより車両等の位置を算出する。
また、測位装置100は、受信したGPS信号に基づいて、センサ等の誤差を推定し、センサが計測した速度などを補正することにより、正確な位置を算出する。
【0008】
図2は、この実施の形態における測位装置100の外観の一例を示す図である。
測位装置100は、システムユニット910、CRT(Cathode・Ray・Tube)やLCD(液晶)の表示画面を有する表示装置901、キーボード902(Key・Board:K/B)、マウス903、FDD904(Flexible・Disk・Drive)、コンパクトディスク装置905(CDD)、プリンタ装置906、スキャナ装置907などのハードウェア資源を備え、これらはケーブルや信号線で接続されている。
システムユニット910は、コンピュータであり、ファクシミリ機932、電話器931とケーブルで接続され、また、ローカルエリアネットワーク942(LAN)、ゲートウェイ941を介してインターネット940に接続されている。
【0009】
図3は、この実施の形態における測位装置100のハードウェア資源の一例を示す図である。
図3において、測位装置100は、プログラムを実行するCPU911(Central・Processing・Unit、中央処理装置、処理装置、演算装置、マイクロプロセッサ、マイクロコンピュータ、プロセッサともいう)を備えている。CPU911は、バス912を介してROM913、RAM914、通信装置915、表示装置901、キーボード902、マウス903、FDD904、CDD905、プリンタ装置906、スキャナ装置907、磁気ディスク装置920と接続され、これらのハードウェアデバイスを制御する。磁気ディスク装置920の代わりに、光ディスク装置、メモリカード読み書き装置などの記憶装置でもよい。
RAM914は、揮発性メモリの一例である。ROM913、FDD904、CDD905、磁気ディスク装置920の記憶媒体は、不揮発性メモリの一例である。これらは、記憶装置あるいは記憶部の一例である。
通信装置915、キーボード902、スキャナ装置907、FDD904などは、入力部、入力装置の一例である。
また、通信装置915、表示装置901、プリンタ装置906などは、出力部、出力装置の一例である。
【0010】
通信装置915は、ファクシミリ機932、電話器931、LAN942等に接続されている。通信装置915は、LAN942に限らず、インターネット940、ISDN等のWAN(ワイドエリアネットワーク)などに接続されていても構わない。インターネット940或いはISDN等のWANに接続されている場合、ゲートウェイ941は不用となる。
磁気ディスク装置920には、オペレーティングシステム921(OS)、ウィンドウシステム922、プログラム群923、ファイル群924が記憶されている。プログラム群923のプログラムは、CPU911、オペレーティングシステム921、ウィンドウシステム922により実行される。
【0011】
上記プログラム群923には、以下に述べる実施の形態の説明において「〜部」、「〜手段」として説明する機能を実行するプログラムが記憶されている。プログラムは、CPU911により読み出され実行される。
ファイル群924には、以下に述べる実施の形態の説明において、「〜の判定結果」、「〜の計算結果」、「〜の処理結果」として説明する情報やデータや信号値や変数値やパラメータが、「〜ファイル」や「〜データベース」の各項目として記憶されている。「〜ファイル」や「〜データベース」は、ディスクやメモリなどの記録媒体に記憶される。ディスクやメモリになどの記憶媒体に記憶された情報やデータや信号値や変数値やパラメータは、読み書き回路を介してCPU911によりメインメモリやキャッシュメモリに読み出され、抽出・検索・参照・比較・演算・計算・処理・出力・印刷・表示などのCPUの動作に用いられる。抽出・検索・参照・比較・演算・計算・処理・出力・印刷・表示のCPUの動作の間、情報やデータや信号値や変数値やパラメータは、メインメモリやキャッシュメモリやバッファメモリに一時的に記憶される。
また、以下に述べる実施の形態の説明において説明するフローチャートの矢印の部分は主としてデータや信号の入出力を示し、データや信号値は、RAM914のメモリ、FDD904のフレキシブルディスク、CDD905のコンパクトディスク、磁気ディスク装置920の磁気ディスク、その他光ディスク、ミニディスク、DVD(Digital・Versatile・Disc)等の記録媒体に記録される。また、データや信号は、バス912や信号線やケーブルその他の伝送媒体によりオンライン伝送される。
【0012】
また、以下に述べる実施の形態の説明において「〜部」、「〜手段」として説明するものは、「〜回路」、「〜装置」、「〜機器」であってもよく、また、「〜ステップ」、「〜手順」、「〜処理」であってもよい。すなわち、「〜部」、「〜手段」として説明するものは、ROM913に記憶されたファームウェアで実現されていても構わない。或いは、ソフトウェアのみ、或いは、素子・デバイス・基板・配線などのハードウェアのみ、或いは、ソフトウェアとハードウェアとの組み合わせ、さらには、ファームウェアとの組み合わせで実施されても構わない。ファームウェアとソフトウェアは、プログラムとして、磁気ディスク、フレキシブルディスク、光ディスク、コンパクトディスク、ミニディスク、DVD等の記録媒体に記憶される。プログラムはCPU911により読み出され、CPU911により実行される。すなわち、プログラムは、以下に述べる「〜部」、「〜手段」としてコンピュータを機能させるものである。あるいは、以下に述べる「〜部」、「〜手段」の手順や方法をコンピュータに実行させるものである。
【0013】
図4は、この実施の形態における測位装置100の機能ブロックの一例を示すブロック構成図である。
測位装置100は、GPS受信機111、距離及び距離変化率観測部112、車速パルス発生器121、ジャイロスコープ122、誤差推定部130、センサ補正部141、位置算出部142、進捗度算出部151、信頼性判定部152を有する。
【0014】
GPS受信機111は、GPS衛星200が発信したGPS信号を受信する。GPS受信機111は、受信装置の一例である。
GPS受信機111は、受信できるGPS信号が複数ある場合には、複数のGPS衛星200がそれぞれ発信した複数のGPS信号を、それぞれ受信する。
【0015】
距離及び距離変化率観測部112は、GPS受信機111が受信したGPS信号に基づいて、GPS衛星までの距離(以下「擬似距離」という。)と、擬似距離の変化率とを算出する。
距離及び距離変化率観測部112は、GPS受信機111が受信したGPS信号が複数ある場合には、GPS受信機111が受信した複数のGPS信号それぞれについて、それぞれのGPS衛星200までの擬似距離及び擬似距離の変化率を算出する。ただし、信頼できる擬似距離及び擬似距離の変化率を算出できないGPS信号については棄却し、擬似距離や擬似距離の変化率を算出しない。
信頼できる擬似距離や擬似距離の変化率が算出できない場合としては、例えば、受信したGPS信号がマルチパスである場合や、GPS衛星200の仰角が低い場合などがある。
距離及び距離変化率観測部112は、これらの条件を判定して、擬似距離や擬似距離の変化率を算出するか否かを決定する。あるいは、距離及び距離変化率観測部112は、擬似距離や擬似距離の変化率を算出したのち、算出した擬似距離や擬似距離の変化率が信頼できるものであるか否かを判断して、棄却してもよい。
距離及び距離変化率観測部112は、算出した擬似距離や擬似距離の変化率を示す情報を距離及び距離変化率情報として出力する。
【0016】
車速パルス発生器121は、測位装置100を搭載した車両等の速度を計測する。車速パルス発生器121は、速度センサの一例である。
車速パルス発生器121は、車速パルスを出力する。車速パルスとは、計測した速度に比例する周波数を有するパルス信号である。車速パルスは、速度情報の一例である。
【0017】
ジャイロスコープ122は、測位装置100を相対した車両等の角速度を計測する。ジャイロスコープ122は、角速度センサの一例である。
ジャイロスコープ122は、計測した角速度に比例する電圧(あるいは、その電圧をアナログデジタル変換した数値を示す情報)を出力する。ジャイロスコープ122が出力する電圧(あるいは数値)は、角速度情報の一例である。
【0018】
誤差推定部130は、CPU911などの処理装置を用いて、距離及び距離変化率観測部112が出力した距離及び距離変化率情報を入力する。
距離及び距離変化率情報は、観測情報の一例である。
誤差推定部130は、CPU911などの処理装置を用いて、車速パルス発生器121が出力した車速パルス(あるいは、車速パルスをCPU911が処理可能な情報に変換した情報)を入力する。
誤差推定部130は、CPU911などの処理装置を用いて、ジャイロスコープ122が出力した電圧(あるいは、電圧をCPU911が処理可能な情報に変換した情報)を入力する。
車速パルスなどの速度情報・角速度情報は、計測情報の一例である。
【0019】
誤差推定部130は、CPU911などの処理装置を用いて、入力した観測情報と計測情報とに基づいて、センサの計測誤差を推定する。
計測誤差とは、センサの計測に伴う誤差である。測位装置100は、誤差推定部130が推定した計測誤差を補正することにより、正確な位置を算出する。
【0020】
例えば、車速パルス発生器121の場合、車速パルス発生器121が出力した車速パルスの周波数に、あらかじめ定められた定数(スケールファクタ)を乗じることにより、車速パルス発生器121が計測した車両等の速度を知ることができる。しかし、車速パルス発生器121のスケールファクタは、周囲の温度や製造時の精度などにより、公称値と異なる値となる場合があるので、正確なスケールファクタを知らなければ、車両等の正確な速度を求めることができない。このようなスケールファクタのずれを、スケールファクタ誤差という。スケールファクタ誤差は、計測誤差の一例である。
【0021】
ジャイロスコープ122の場合も同様に、ジャイロスコープ122が出力した電圧に、あらかじめ定められた定数(スケールファクタ)を乗じることにより、ジャイロスコープ122が計測した角速度を知ることができる。したがって、ジャイロスコープ122にもスケールファクタ誤差が存在する。
また、ジャイロスコープ122は、回転していない状態でも一定の電圧を出力する場合があるので、これも誤差の要因となる。このようなずれをバイアス誤差という。バイアス誤差も、計測誤差の一例である。
【0022】
また、距離及び距離変化率観測部112では、通常、GPS衛星200までの距離及び距離変化率を算出するため、内部に時計を有している。この時計のクロック周波数がずれると、GPS衛星200までの距離や擬似距離の変化率を正確に算出できない。クロックの誤差には、バイアス誤差、ドリフト誤差などがある。バイアス誤差、ドリフト誤差も、計測誤差の一例である。
【0023】
誤差推定部130は、CPU911などの処理装置を用いて、推定した計測誤差を示す情報を、計測誤差情報として出力する。
【0024】
また、誤差推定部130は、CPU911などの処理装置を用いて、推定した計測誤差の推定誤差を算出する。
推定誤差とは、推定した計測誤差と真の計測誤差との間の誤差がどのくらいあるかを示すものである。推定した計測誤差は、真の計測誤差を中心として正規分布すると考えられるので、推定誤差は、その分散(あるいは、2つ以上の推定誤差の間に相関がある場合は共分散)で表わす。
誤差推定部130は、算出した推定誤差を示す情報を、推定誤差情報として出力する。
【0025】
センサ補正部141は、CPU911などの処理装置を用いて、車速パルス発生器121が出力した車速パルスなどの速度情報を入力する。
センサ補正部141は、CPU911などの処理装置を用いて、ジャイロスコープ122が出力した角速度情報を入力する。
センサ補正部141は、CPU911などの処理装置を用いて、誤差推定部130が出力した推定誤差情報を入力する。
センサ補正部141は、CPU911などの処理装置を用いて、入力した速度情報が示す速度を、入力した推定誤差情報が示す推定誤差で補正する。
センサ補正部141は、CPU911などの処理装置を用いて、入力した角速度情報が示す角速度を、入力した推定誤差情報が示す推定誤差で補正する。
センサ補正部141は、CPU911などの処理装置を用いて、補正した物理量を示す情報を、補正計測情報として出力する。
【0026】
位置算出部142は、CPU911などの処理装置を用いて、センサ補正部141が出力した補正計測情報を入力する。
位置算出部142は、CPU911などの処理装置を用いて、入力した補正計測情報に基づいて、現在位置を算出する。
位置算出部142は、CPU911などの処理装置を用いて、算出した現在位置を示す情報を、位置情報として出力する。
位置算出部142が出力した位置情報は、例えば、表示装置901などに表示して利用者等に知らせる。
【0027】
進捗度算出部151は、CPU911などの処理装置を用いて、誤差推定部130が出力した推定誤差情報を入力する。
進捗度算出部151は、CPU911などの処理装置を用いて、入力した推定誤差情報に基づいて、誤差推定の進捗度を算出する。
【0028】
測位装置100が動作を開始した直後は、誤差推定部130は計測誤差を正しく推定できない。距離及び距離変化率情報などの観測情報や、速度情報・角速度情報などの計測情報が集まるにつれて、計測誤差の推定の精度が向上していく。
誤差推定の進捗度は、計測誤差の推定の精度がどのくらいであるかを示すものである。
【0029】
進捗度算出部151は、CPU911などの処理装置を用いて、算出した進捗度を示す情報を、進捗度情報として出力する。
【0030】
信頼性判定部152は、CPU911などの処理装置を用いて、進捗度算出部151が出力した進捗度情報を入力する。
信頼性判定部152は、CPU911などの処理装置を用いて、入力した進捗度情報に基づいて、誤差推定部130の初期化が終わったか否か、すなわち、誤差推定部130が推定した計測誤差が信頼できるか否かを判定する。信頼性判定部152は、初期化終了判定部の一例である。
信頼性判定部152は、CPU911などの処理装置を用いて、判定した判定結果を示す情報を、判定情報として出力する。
【0031】
信頼性判定部152が出力した判定情報は、例えば、表示装置901などに表示して、利用者等に知らせる。
あるいは、位置算出部142が算出した位置情報をマップマッチング(Map Matching:地図照合)する際に利用してもよい。
【0032】
デッドレコニングによる位置算出では、車両等の移動ベクトルを積分して、現在位置を求める。移動ベクトルは、移動速度と移動方向とから求める。移動速度は、速度センサが計測した値である。移動方向は、角速度センサが計測した角速度を積分することにより求める。
したがって、速度センサや角速度センサに計測誤差があると、たとえ微小な誤差でも積分によって誤差が蓄積し、正しい位置算出ができない。
そのため、GPS信号による補正が必要となる。
【0033】
GPS測位は、絶対精度が高いが、受信状態が悪いと測位できない場合があり、連続性が劣っている。そこで、GPS測位とデッドレコニング測位とを複合計算することで、互いの長所を生かした高精度な測位を実現する。
【0034】
一方、センサの計測誤差が正しく推定された後であれば、GPS信号が受信できなくても、ある程度正確な位置算出ができる。これにより、高層ビル街のようなGPS信号の受信状態が悪い状況や、地下のようなGPS信号が受信できない状況であっても、正確な位置算出ができる。
したがって、GPS信号が受信できない状況などになったとき、センサの計測誤差が正しく推定されているか否かにより、位置算出部142が算出する現在位置の信頼性が大きく変わることになる。
【0035】
このため、計測誤差が正しく推定されているか否かを正確に判定することが重要である。
【0036】
次に、誤差推定部130について、詳しく説明する。
【0037】
図5は、この実施の形態における誤差推定部130が計測誤差を推定するために用いるカルマンフィルタの動作を示す図である。
【0038】
カルマンフィルタは、離散的に得られる観測値を元に、知りたい状態量を推定するものである。
カルマンフィルタには、大きく分けて、時間外挿過程と観測更新過程との2つの工程がある。
時間外挿過程は、1つ前の状態から、現在の状態を予測する工程である。
観測更新過程は、現在の状態について得られた観測値を元に、真の状態を推定する工程である。
カルマンフィルタは、観測値が得られるたびにこの2つの工程を繰り返し、徐々に推定の精度を上げていく。
【0039】
時間外挿過程には、状態方程式外挿処理と、誤差共分散外挿処理とがある。
【0040】
状態方程式外挿処理とは、1つ前の状態量ベクトル(推定)xk+から、現在の状態量ベクトル(予測)xk+1−を予測する処理である。
状態量の予測には、状態遷移行列Φを用いる。
状態遷移行列Φは、例えば、力学モデルから導き出したものである。
【0041】
誤差共分散外挿処理とは、1つ前の誤差共分散行列(推定)Pk+から、現在の誤差共分散行列(予測)Pk+1−を予測する処理である。
誤差共分散の予測には、状態遷移行列Φと、プロセスノイズ行列Qとを用いる。
状態遷移行列Φは、状態方程式外挿処理で用いたものと同じものである。
プロセスノイズ行列Qは、モデルの時間発展に伴う誤差を示すものである。
【0042】
観測更新過程には、カルマンゲイン算出処理と、状態方程式更新処理と、誤差共分散更新処理とがある。
【0043】
カルマンゲイン算出処理とは、状態量ベクトル(予測)xk+1−を、観測値ベクトルzk+1で補正して、状態量ベクトル(推定)xk+1+を得るための行列であるカルマンゲインKを算出する処理である。
カルマンゲインの算出には、誤差共分散行列(予測)Pk+1−と、観測行列Hと、観測ノイズ行列Rとを用いる。
誤差共分散行列(予測)は、誤差共分散外挿処理で予測したものである。
観測行列Hは、状態量ベクトルxを観測値ベクトルzに変換する行列である。すなわち、状態量ベクトルが示す状態を観測した結果として、観測値ベクトルが示す観測値が得られるという関係を数式化したものである。
観測ノイズ行列Rは、観測に伴う誤差を示すものである。観測ノイズ行列Rが示す観測に伴う誤差は、スケールファクタ誤差などの組織的な観測誤差とは異なり、観測に伴ってランダムに混入する誤差(ノイズ)のことである。
【0044】
状態方程式更新処理とは、状態量ベクトル(予測)xk+1−を、観測値ベクトルzk+1で補正し、状態量ベクトル(推定)xk+1+を推定する処理である。
状態量ベクトルの推定には、カルマンゲインKと、観測行列Hとを用いる。
カルマンゲインKは、カルマンゲイン算出処理で算出したものである。
観測行列Hは、カルマンゲイン算出処理で用いたものと同じものである。
【0045】
誤差共分散更新処理とは、誤差共分散行列(予測)Pk+1−を補正して、誤差共分散行列(推定)Pk+1+を推定する処理である。
誤差共分散行列の推定には、カルマンゲインKと、観測行列Hとを用いる。
カルマンゲインKは、カルマンゲイン算出処理で算出したものである。
観測行列Hは、カルマンゲイン算出処理で用いたものと同じものである。
【0046】
カルマンフィルタは、以上の処理を繰り返すことにより、状態を推定する。
【0047】
図6は、この実施の形態における誤差推定部130の内部ブロックの構成を示す詳細ブロック図である。
誤差推定部130は、遷移行列生成部131、観測値生成部132、推定誤差記憶部133、推定誤差予測部134、カルマンゲイン算出部135、推定誤差算出部136、計測誤差記憶部137、計測誤差予測部138、計測誤差推定部139を有する。
【0048】
遷移行列生成部131は、CPU911などの処理装置を用いて、時刻k+1における速度情報と角速度情報とを入力する。
遷移行列生成部131は、CPU911などの処理装置を用いて、入力した速度情報と角速度情報に基づいて、時刻kから時刻k+1への状態遷移行列Φk,k+1を生成する。
遷移行列生成部131は、CPU911などの処理装置を用いて、生成した状態遷移行列Φk,k+1を示す情報を出力する。
【0049】
観測値生成部132は、CPU911などの処理装置を用いて、時刻k+1における距離及び距離変化率情報を入力する。
観測値生成部132は、CPU911などの処理装置を用いて、入力した距離及び距離変化率情報に基づいて、時刻k+1における観測値ベクトルzk+1を生成する。
観測値生成部132は、CPU911などの処理装置を用いて、生成した観測値ベクトルzk+1を示す情報を出力する。
【0050】
なお、距離及び距離変化率情報の数が少ない場合には、観測更新過程を処理することができない。そのため、観測値生成部132は、CPU911などの処理装置を用いて、入力した距離及び距離変化率情報の数を、所定の数(例えば2)と比較する。観測値生成部132は、CPU911などの処理装置を用いて、入力した距離及び距離変化率情報の数が所定の数以上である場合のみ、観測値ベクトルzk+1を生成する。
観測値ベクトルzk+1を生成しない場合、観測値生成部132は、CPU911などの処理装置を用いて、観測値ベクトルzk+1を生成しないことを示す情報を出力する。
【0051】
推定誤差記憶部133は、RAM914などの記憶装置を用いて、時刻kにおける誤差共分散行列(推定)Pk+を示す情報を、推定誤差情報として記憶している。
【0052】
推定誤差予測部134は、上述した誤差共分散外挿処理を行う。
推定誤差予測部134は、CPU911などの処理装置を用いて、推定誤差記憶部133が記憶した推定誤差情報を入力する。
推定誤差予測部134は、CPU911などの処理装置を用いて、遷移行列生成部131が出力した状態遷移行列Φk,k+1を示す情報を入力する。
推定誤差予測部134は、CPU911などの処理装置を用いて、入力した情報に基づいて、誤差共分散行列(推定)Pk+、状態遷移行列Φk,k+1から、時刻k+1における誤差共分散行列(予測)Pk+1−を算出する。
推定誤差予測部134は、CPU911などの処理装置を用いて、算出した誤差共分散行列(予測)Pk+1−を示す情報を出力する。
【0053】
カルマンゲイン算出部135は、上述したカルマンゲイン算出処理を行う。
ただし、観測値生成部132が観測値ベクトルzk+1を生成しなかった場合、カルマンゲイン算出部135は、カルマンゲイン算出処理をしない。
観測値生成部132が出力した情報に基づいて、観測値生成部132が観測値ベクトルzk+1を生成したと判断した場合、カルマンゲイン算出部135は、CPU911などの処理装置を用いて、推定誤差予測部134が出力した誤差共分散行列(予測)Pk+1−を示す情報を入力する。
カルマンゲイン算出部135は、CPU911などの処理装置を用いて、入力した情報に基づいて、誤差共分散行列(予測)Pk+1−から、カルマンゲインKを算出する。
カルマンゲイン算出部135は、CPU911などの処理装置を用いて、算出したカルマンゲインKを示す情報を出力する。
【0054】
推定誤差算出部136は、上述した誤差共分散更新処理を行う。
推定誤差算出部136は、CPU911などの処理装置を用いて、推定誤差予測部134が出力した誤差共分散行列(予測)Pk+1−を示す情報を入力する。
【0055】
観測値生成部132が観測値ベクトルzk+1を生成した場合、推定誤差算出部136は、CPU911などの処理装置を用いて、カルマンゲイン算出部135が出力したカルマンゲインKを示す情報を入力する。
推定誤差算出部136は、CPU911などの処理装置を用いて、入力した情報に基づいて、誤差共分散行列(予測)Pk+1−、カルマンゲインKから、時刻k+1における誤差共分散行列(推定)Pk+1+を算出する。
【0056】
観測値生成部132が観測値ベクトルzk+1を生成しなかった場合、推定誤差算出部136は、CPU911などの処理装置を用いて、入力した誤差共分散行列(予測)Pk+1−を、そのまま誤差共分散行列(推定)Pk+1+とする。
【0057】
推定誤差算出部136は、CPU911などの処理装置を用いて、算出した誤差共分散行列(推定)Pk+1+を示す情報を出力する。
【0058】
推定誤差記憶部133は、CPU911などの処理装置を用いて、推定誤差算出部136が出力した誤差共分散行列(推定)Pk+1+を示す情報を入力する。
推定誤差記憶部133は、RAM914などの記憶装置を用いて、入力した情報を推定誤差情報として記憶する。
【0059】
計測誤差記憶部137は、RAM914などの記憶装置を用いて、時刻kにおける状態量ベクトル(推定)xk+を示す情報を、計測誤差情報として記憶している。
【0060】
計測誤差予測部138は、上述した状態方程式外挿処理を行う。
計測誤差予測部138は、CPU911などの処理装置を用いて、計測誤差記憶部137が記憶した計測誤差情報を入力する。
計測誤差予測部138は、CPU911などの処理装置を用いて、遷移行列生成部131が出力した状態遷移行列Φk,k+1を示す情報を入力する。
計測誤差予測部138は、CPU911などの処理装置を用いて、入力した情報に基づいて、状態量ベクトル(推定)xk+、状態遷移行列Φk,k+1から、時刻k+1における状態量ベクトル(予測)xk+1−を算出する。
計測誤差予測部138は、CPU911などの処理装置を用いて、算出した状態量ベクトル(予測)xk+1−を示す情報を出力する。
【0061】
計測誤差推定部139は、上述した状態方程式更新処理を行う。
計測誤差推定部139は、CPU911などの処理装置を用いて、計測誤差予測部138が出力した状態量ベクトルxk+1−を示す情報を入力する。
【0062】
観測値生成部132が観測値ベクトルzk+1を生成した場合、計測誤差推定部139は、観測値生成部132が出力した観測値ベクトルzk+1を示す情報を入力する。
計測誤差推定部139は、CPU911などの処理装置を用いて、カルマンゲイン算出部135が出力したカルマンゲインKを示す情報を入力する。
計測誤差推定部139は、CPU911などの処理装置を用いて、入力した情報に基づいて、状態量ベクトルxk+1−、観測値ベクトルzk+1、カルマンゲインKから、時刻k+1における状態量ベクトル(推定)xk+1+を算出する。
【0063】
観測値生成部132が観測値ベクトルzk+1を生成しなかった場合、計測誤差推定部139は、CPU911などの処理装置を用いて、入力した状態量ベクトル(予測)xk+1−を、そのまま状態量ベクトル(推定)xk+1+とする。
【0064】
計測誤差推定部139は、CPU911などの処理装置を用いて、算出した状態量ベクトル(推定)xk+1+を示す情報を出力する。
【0065】
計測誤差記憶部137は、CPU911などの処理装置を用いて、計測誤差推定部139が出力した状態量ベクトル(推定)xk+1+を示す情報を入力する。
計測誤差記憶部137は、RAM914などの記憶装置を用いて、入力した情報を、計測誤差情報として記憶する。
【0066】
次に、動作について説明する。
【0067】
図7は、この実施の形態における測位装置100が現在位置を算出する測位処理の流れの一例を示すフローチャート図である。
【0068】
S11〜S13の処理と、S21〜S25の処理とは、それぞれ独立して並列に動作する。
【0069】
S11において、GPS受信機111は、GPS衛星200が発信したGPS信号を受信する。GPS受信機111は、受信できるGPS信号が複数ある場合には、複数のGPS衛星200が発信した複数のGPS信号をそれぞれ受信する。
【0070】
S12において、距離及び距離変化率観測部112は、S11でGPS受信機111が受信したGPS信号に基づいて、GPS衛星200までの擬似距離及び擬似距離の変化率を算出する。
距離及び距離変化率観測部112は、算出した擬似距離及び擬似距離の変化率を示す情報を、距離及び距離変化率情報として出力する。
距離及び距離変化率観測部112は、GPS受信機111が受信したGPS信号のうち、信頼できる擬似距離及び擬似距離の変化率を算出できるGPS信号についてのみ、距離及び距離変化率情報を出力する。
【0071】
S13において、観測値生成部132は、CPU911などの処理装置を用いて、S12で距離及び距離変化率観測部112が出力した距離及び距離変化率情報を入力する。
観測値生成部132は、CPU911などの処理装置を用いて、入力した距離及び距離変化率情報の数が所定の数(例えば、2)以上である場合、観測値ベクトルzk+1を生成する。
観測値生成部132は、CPU911などの処理装置を用いて、生成した観測値ベクトルzk+1を示す情報を出力する。
【0072】
一方、S21において、車速パルス発生器121は、速度を計測する。
車速パルス発生器121は、計測した速度を示す速度情報を出力する。
【0073】
S22において、ジャイロスコープ122は、角速度を計測する。
ジャイロスコープ122は、計測した角速度を示す角速度情報を出力する。
【0074】
S23において、遷移行列生成部131は、CPU911などの処理装置を用いて、S21で車速パルス発生器121が出力した速度情報と、S22でジャイロスコープ122が出力した角速度情報とを入力する。
遷移行列生成部131は、CPU911などの処理装置を用いて、入力した速度情報と角速度情報とに基づいて、状態遷移行列Φk,k+1を生成する。
遷移行列生成部131は、CPU911などの処理装置を用いて、生成した状態遷移行列Φk,k+1を示す情報を出力する。
【0075】
S24において、推定誤差予測部134は、CPU911などの処理装置を用いて、推定誤差記憶部133が記憶した時刻kにおける誤差共分散行列(推定)Pk+を示す推定誤差情報と、S23で遷移行列生成部131が出力した状態遷移行列Φk,k+1を示す情報とを入力する。
推定誤差予測部134は、CPU911などの処理装置を用いて、入力した情報に基づいて、時刻k+1における誤差共分散行列(予測)Pk+1−=Φk,k+1Pk+Φk,k+1T+Qk,k+1を算出する。
推定誤差予測部134は、CPU911などの処理装置を用いて、算出した誤差共分散行列(予測)Pk+1−を示す情報を出力する。
【0076】
S25において、計測誤差予測部138は、CPU911などの処理装置を用いて、計測誤差記憶部137が記憶した時刻kにおける状態量ベクトルxk+を示す計測誤差情報と、S23で遷移行列生成部131が出力した状態遷移行列Φk,k+1を示す情報とを入力する。
計測誤差予測部138は、CPU911などの処理装置を用いて、入力した情報に基づいて、時刻k+1における状態量ベクトル(予測)xk+1−=Φk,k+1xk+を算出する。
計測誤差予測部138は、CPU911などの処理装置を用いて、算出した状態量ベクトル(予測)xk+1−を示す情報を出力する。
【0077】
S31において、観測更新可能であるか否かに基づいて、処理を分岐する。観測更新可能である場合とは、観測値生成部132が観測値ベクトルzk+1を生成した場合のことである。
観測更新可能な場合には、S32へ進む。
観測更新できない場合には、S35へ進む。
【0078】
S32において、カルマンゲイン算出部135は、CPU911などの処理装置を用いて、S24で推定誤差予測部134が出力した誤差共分散行列(予測)Pk+1−を示す情報を入力する。
カルマンゲイン算出部135は、CPU911などの処理装置を用いて、入力した情報に基づいて、カルマンゲインK=Pk+1−Hk+1(Hk+1TPk+1−Hk+1+Rk+1)−1を算出する。
カルマンゲイン算出部135は、CPU911などの処理装置を用いて、算出したカルマンゲインKを示す情報を出力する。
【0079】
S33において、推定誤差算出部136は、CPU911などの処理装置を用いて、S24で推定誤差予測部134が出力した誤差共分散行列(予測)Pk+1−を示す情報と、S32でカルマンゲイン算出部135が出力したカルマンゲインKを示す情報とを入力する。
推定誤差算出部136は、CPU911などの処理装置を用いて、入力した情報に基づいて、時刻k+1における誤差共分散行列(推定)Pk+1+=Pk+1−−KHk+1TPk+1−を算出する。
推定誤差算出部136は、CPU911などの処理装置を用いて、算出した誤差共分散行列(推定)Pk+1+を示す推定誤差情報を出力する。
推定誤差記憶部133は、CPU911などの処理装置を用いて、推定誤差算出部136が出力した誤差共分散行列(推定)Pk+1+を示す推定誤差情報を入力する。
推定誤差記憶部133は、RAM914などの記憶装置を用いて、入力した推定誤差情報を記憶する。
【0080】
S34において、計測誤差推定部139は、CPU911などの処理装置を用いて、S13で観測値生成部132が出力した観測値ベクトルzk+1を示す情報と、S25で計測誤差予測部138が出力した状態量ベクトル(予測)xk+1−を示す情報と、S32でカルマンゲイン算出部135が出力したカルマンゲインKを示す情報とを入力する。
計測誤差推定部139は、CPU911などの処理装置を用いて、入力した情報に基づいて、時刻k+1における状態量ベクトル(推定)xk+1+=xk+1−+K(zk+1−Hk+1Txk+1−)を算出する。
計測誤差推定部139は、CPU911などの処理装置を用いて、算出した状態量ベクトル(推定)xk+1+を示す計測誤差情報を出力する。
計測誤差記憶部137は、CPU911などの処理装置を用いて、計測誤差推定部139が出力した状態量ベクトル(推定)xk+1+を示す計測誤差情報を入力する。
計測誤差記憶部137は、RAM914などの記憶装置を用いて、入力した計測誤差情報を記憶する。
その後、S41へ進む。
【0081】
一方、S35において、推定誤差算出部136は、CPU911などの処理装置を用いて、S24で推定誤差予測部134が出力した誤差共分散行列(予測)Pk+1−を示す情報を入力する。
推定誤差算出部136は、CPU911などの処理装置を用いて、入力した情報をそのまま、誤差共分散行列(推定)Pk+1+を示す推定誤差情報として出力する。
推定誤差記憶部133は、CPU911などの処理装置を用いて、推定誤差算出部136が出力した誤差共分散行列(推定)Pk+1+を示す推定誤差情報を入力する。
推定誤差記憶部133は、RAM914などの記憶装置を用いて、入力した推定誤差情報を記憶する。
【0082】
S36において、計測誤差推定部139は、CPU911などの処理装置を用いて、S25で計測誤差予測部138が出力した状態量ベクトル(予測)xk+1−を示す情報を入力する。
計測誤差推定部139は、CPU911などの処理装置を用いて、入力した情報をそのまま、状態量ベクトル(推定)xk+1+を示す計測誤差情報として出力する。
計測誤差記憶部137は、CPU911などの処理装置を用いて、計測誤差推定部139が出力した状態量ベクトル(推定)xk+1+を示す計測誤差情報を入力する。
計測誤差記憶部137は、RAM914などの記憶装置を用いて、入力した計測誤差情報を記憶する。
その後、S41へ進む。
【0083】
S41において、センサ補正部141は、CPU911などの処理装置を用いて、S21で車速パルス発生器121が出力した速度情報と、S22でジャイロスコープ122が出力した角速度情報と、S34またはS36で計測誤差推定部139が出力した計測誤差情報とを入力する。
センサ補正部141は、CPU911などの処理装置を用いて、入力した計測誤差情報に基づいて、入力した速度情報が示す速度と角速度情報が示す角速度とを補正する。
センサ補正部141は、CPU911などの処理装置を用いて、補正した速度を示す補正速度情報と、補正した角速度を示す補正角速度情報とを出力する。
【0084】
S42において、位置算出部142は、CPU911などの処理装置を用いて、S41でセンサ補正部141が出力した補正速度情報と、補正角速度情報とを入力する。
位置算出部142は、CPU911などの処理装置を用いて、入力した補正速度情報と補正角速度情報とに基づいて、デッドレコニング処理を行い、現在位置を算出する。
位置算出部142は、CPU911などの処理装置を用いて、算出した現在位置を示す情報を出力する。
【0085】
S51において、進捗度算出部151は、CPU911などの処理装置を用いて、S33またはS35で推定誤差算出部136が出力した推定誤差情報を入力する。
進捗度算出部151は、CPU911などの処理装置を用いて、入力した推定誤差情報に基づいて、誤差推定の進捗度を算出する。
進捗度算出部151は、CPU911などの処理装置を用いて、算出した誤差推定の進捗度を示す進捗度情報を出力する。
【0086】
S52において、信頼性判定部152は、CPU911などの処理装置を用いて、S51で進捗度算出部151が出力した進捗度情報を入力する。
信頼性判定部152は、CPU911などの処理装置を用いて、入力した進捗度情報に基づいて、初期化が終了したか否かを判定する。初期化が終了していればセンサ補正部141が出力した補正速度情報・補正角速度情報などの補正計測情報が信頼できるので、信頼性判定部152は、すなわち、センサ補正部141が出力した補正計測情報が信頼できるか否かを判定する。また、補正計測情報が信頼できれば位置算出部142が出力した位置情報が信頼できるので、信頼性判定部152は、すなわち、位置算出部142が出力した位置情報が信頼できるか否かを判定する。
【0087】
なお、この例では、速度情報及び角速度情報を状態遷移行列Φの生成に使用し、距離及び距離変化率情報から観測値ベクトルzを生成しているが、速度情報及び角速度情報を、観測値ベクトルの生成に使用してもよい。
しかし、GPS信号の受信状態によっては、観測更新に必要な距離及び距離変化率情報が得られない場合がある。速度情報及び角速度情報を観測値ベクトルzの生成に使用すると、観測更新に必要な距離及び距離変化率情報が得られず観測更新ができなかった場合、推定された計測誤差には、計測された速度情報や角速度情報が反映されないことになる。
この例のように、速度情報及び角速度情報を観測値ベクトルzではなく、状態遷移行列Φの生成に使用すると、観測更新に必要な距離及び距離変化率情報が得られない場合でも、ある程度の確度をもって、計測誤差を推定できるので、好ましい。
【0088】
また、この例では、GPS信号から算出した擬似距離及び擬似距離の変化率に基づいて、観測値ベクトルzを生成している(これを「密結合カルマンフィルタ方式」という)が、GPS信号に基づいて位置や速度を算出し、算出した位置や速度に基づいて、観測値ベクトルzを生成してもよい(これを「疎結合カルマンフィルタ方式」という)。
しかし、GPS信号に基づいて位置や速度を算出するためには、3乃至4以上のGPS信号を受信する必要があるのに対し、観測更新に必要な距離及び距離変化率情報は2つ以上(2衛星以上)あればよいので、この例における方式のほうが、利用可能なGPS信号が少ない場合でも、観測更新が可能となり、好ましい。
【0089】
また、この例では、速度情報及び角速度情報に基づくデッドレコニングによる位置算出を主とし、これをGPS信号に基づいて補正しているが、GPS信号に基づく位置算出を主として、デッドレコニングに基づいて補正することとしてもよい。
【0090】
次に、誤差推定の進捗度について説明する。
【0091】
図8は、この実施の形態における進捗度算出部151及び信頼性判定部152を示す図である。
【0092】
進捗度算出部151は、CPU911などの処理装置を用いて、推定誤差算出部136が出力した推定誤差情報を入力する。
推定誤差情報は、推定誤差算出部136が算出した時刻k+1における誤差共分散行列Pk+1+を示す情報である。
誤差共分散行列は、推定した状態量(この場合は計測誤差)と、真の状態量との差(推定誤差)を要素とするベクトルpの外積の期待値〈ppT〉である。
誤差共分散行列の対角要素は、対応する状態量の推定誤差の分散を示す。誤差共分散行列の非対角要素は、対応する2つの状態量の推定誤差の共分散を示し、2つの状態量の推定誤差の間に相関がなければ0となる。
したがって、誤差共分散行列の対角要素の値から、対応する状態量の推定誤差がどの程度あるかを知ることができる。
【0093】
進捗度算出部151は、CPU911などの処理装置を用いて、入力した推定誤差情報に基づいて、誤差推定の進捗度を算出すべき所定の状態量に対応する誤差共分散行列Pk+1+の対角要素の値(推定誤差の分散)Psensorを取得する。
【0094】
推定した状態量が完全に真の状態量と一致し、推定誤差が0になれば、推定誤差の分散は0になる。しかし、実際には、推定した状態量が完全に真の状態量と一致することはないので、誤差推定が進むと、推定誤差の分散は0に近づくが0にはならない。
【0095】
そこで、この実施の形態では、推定誤差の分散Psensorを、推定誤差の分散の初期値Psensor1stと比較することにより、進捗度算出部151が誤差推定の進捗度を算出する。
推定誤差の分散の初期値Psensor1stは、あらかじめ定めたものを、図示していない推定誤差初期値記憶部が、ROM913などの記憶装置を用いて記憶しておく。推定誤差の分散の初期値Psensor1stは、例えば、車速パルス発生器121の仕様書に記載の精度・誤差などに基づいて算出する。推定誤差の分散の初期値Psensor1stは、観測開始時(時刻k=0)に推定誤差記憶部133が記憶している誤差共分散行列P0+の要素である。
【0096】
進捗度算出部151は、CPU911などの処理装置を用いて、誤差推定の進捗度を算出すべき所定の状態量に対応する推定誤差の分散の初期値Psensor1st(誤差共分散行列の要素の初期値)を示す情報を入力する。
進捗度算出部151は、CPU911などの処理装置を用いて、入力した情報が示す推定誤差の分散Psensorと、推定誤差の分散の初期値Psensor1stとに基づいて、誤差推定の進捗度Lconvを算出する。
【0097】
この実施の形態では、誤差推定の進捗度Lconvを、Lconv=1−Psensor/Psensor1stと定義する。進捗度算出部151は、CPU911などの処理装置を用いて、誤差推定の進捗度Lconv=1−Psensor/Psensor1stを算出する。
この式は、推定誤差の分散Psensorが初期値Psensor1stから比較してどこまで小さくなっているかを示すものであり、Psensorが初期値のままであれば推定誤差の進捗度(収束度合い)Lconv=0となる。逆に最大限に収束してPsensor=0となれば、Lconv=1となる。
したがって、誤差推定の進捗度Lconvは、0〜1の間の値をとり、大きいほど誤差推定が進んでいることを示す。
【0098】
進捗度算出部151は、CPU911などの処理装置を用いて、算出した誤差推定の進捗度Lconvを示す進捗度情報を出力する。信頼性判定部152は、CPU911などの処理装置を用いて、進捗度算出部151が出力した進捗度情報を入力する。
【0099】
上述したように、推定誤差の分散Psensorが完全に0になることはないので、誤差推定が進むと進捗度Lconvは1に近づくが、1にはならない。
そこで、信頼性判定部152は、進捗度Lconvを所定の閾値(例えば0.95)と比較することにより、誤差推定の信頼性を判定する。
すなわち、信頼性判定部152は、CPU911などの処理装置を用いて、入力した進捗度情報が示す進捗度Lconvと所定の閾値とを比較して、進捗度Lconvが所定の閾値より大きい場合に、センサの初期化が終了したと判定する。
【0100】
「センサの初期化」とは、すなわち、車速パルス発生器121、ジャイロスコープ122などの計測誤差が正しく推定できたことをいう。
観測開始時には、計測誤差がどれほどあるかわからない。その後、カルマンフィルタにより、速度情報や角速度情報などの計測情報と、受信したGPS信号に基づく距離及び距離変化率情報などの観測情報とから、それぞれの計測誤差が推定できる。
ひとたび正しい計測誤差が推定できれば、その後GPS信号の受信状態が悪くなっても、計測誤差がわかっているので、速度情報や角速度情報などだけに基づいて位置を算出しても、大きく間違うことはなく、正確な位置が算出できる。
GPS信号が受信できない状態が長く続くと、推定した計測誤差が真の計測誤差からすこしずつ離れていく場合もあるが、GPS信号が受信できれば、すぐに真の計測誤差に追随することができるので、推定した計測誤差が真の計測誤差から大きく離れることはない。
したがって、計測開始後、最初に進捗度Lconvが所定の閾値を超えるまでの期間を、センサの初期化の期間と呼ぶ。
【0101】
次に、この実施の形態における測位装置100を用いた実験結果について説明する。
【0102】
図9は、この実施の形態における測位装置100による計測誤差推定の実験結果を示すグラフ図である。
図10は、図9に示した実験において、進捗度算出部151が算出した誤差推定の進捗度を示すグラフ図である。
【0103】
図9及び図10において、横軸は共に時刻を示し、一目盛は50秒である。
図9において、縦軸は誤差推定部130が推定した計測誤差を示す。
一番上のグラフは、車速パルス発生器121のスケールファクタ誤差について推定した計測誤差である。
真ん中のグラフは、ジャイロスコープ122のスケールファクタ誤差について推定した計測誤差である。
一番下のグラフは、ジャイロスコープ122のバイアス誤差について推定した計測誤差である。
図10において、縦軸は誤差推定の進捗度(収束度)を示す。
一番上のグラフは、車速パルス発生器121のスケールファクタ誤差についての誤差推定の進捗度である。
真ん中のグラフは、ジャイロスコープ122のスケールファクタ誤差についての誤差推定の進捗度である。
一番下のグラフは、ジャイロスコープ122のバイアス誤差についての誤差推定の進捗度である。
【0104】
図9において、車速パルス発生器121のスケールファクタ誤差及びジャイロスコープ122のスケールファクタ誤差は、時刻4.543付近で一定値に収束している。また、ジャイロスコープ122のバイアス誤差は、時刻4.544付近で一定値に収束している。
一方、図10において、推定した計測誤差が一定値に収束するのとほぼ同じタイミングで、進捗度が1に近づいており、進捗度の定義が妥当であることがわかる。
【0105】
特に注目すべき点は、ジャイロスコープ122のバイアス誤差について推定した計測誤差は、階段状に変化しており、時刻4.543付近で、一定値に収束したかに見える。
しかし、この時点での進捗度は0.5程度であるから、センサの初期化が終了していないことがわかる。
【0106】
この実施の形態における測位装置100(センサ誤差推定装置)は、
情報を処理するCPU911などの処理装置と、物理量(速度・角速度)を計測するセンサ(車速パルス発生器121・ジャイロスコープ122)と、誤差推定部130と、進捗度算出部151とを有し、
誤差推定部130は、
CPU911などの処理装置を用いて、観測量(擬似距離及び擬似距離の変化率)を示す情報(距離及び距離変化率情報)を観測情報として入力し、
CPU911などの処理装置を用いて、入力した観測情報(距離及び距離変化率情報)に基づいて、センサ(車速パルス発生器121・ジャイロスコープ122)の計測誤差を推定し、
CPU911などの処理装置を用いて、推定した計測誤差の推定誤差を算出し、
CPU911などの処理装置を用いて、算出した推定誤差を示す情報を推定誤差情報として出力し、
進捗度算出部151は、
CPU911などの処理装置を用いて、誤差推定部130が出力した推定誤差情報を入力し、
CPU911などの処理装置を用いて、入力した推定誤差情報に基づいて、誤差推定の進捗度Lconvを算出し、
CPU911などの処理装置を用いて、算出した進捗度Lconvを示す情報を進捗度情報として出力することを特徴とする。
【0107】
この実施の形態における測位装置100(センサ誤差推定装置)によれば、誤差推定部130が算出した推定誤差に基づいて、進捗度算出部151が誤差推定の進捗度Lconvを算出するので、誤差推定の進捗度を計算により見積もることができるという効果を奏する。
【0108】
この実施の形態における測位装置100(センサ誤差推定装置)は、
誤差推定部130が、
CPU911などの処理装置を用いて、カルマンフィルタを用いて計測誤差xk+1+を推定し、
CPU911などの処理装置を用いて、カルマンフィルタが算出する誤差共分散行列Pk+1+を示す情報を推定誤差情報として出力することを特徴とする。
【0109】
この実施の形態における測位装置100(センサ誤差推定装置)によれば、カルマンフィルタを用いて計測誤差を推定する誤差推定部130が、計測誤差を推定するために算出する誤差共分散行列Pk+1+に基づいて、進捗度算出部151が誤差推定の進捗度Lconvを算出するので、進捗度算出のための計算量が少なく、CPU911などの処理装置の資源を有効に活用できるという効果を奏する。
【0110】
この実施の形態における測位装置100(センサ誤差推定装置)は、
進捗度算出部151が、
入力した推定誤差情報が示す誤差共分散行列Pk+1+の要素のうち、少なくとも一つの要素について、CPU911などの処理装置を用いて、上記要素の値(推定誤差の分散)Psensorと上記要素の初期値(推定誤差の分散の初期値)Psensor1stとに基づいて、誤差推定の進捗度Lconvを算出することを特徴とする。
【0111】
この実施の形態における測位装置100(センサ誤差推定装置)によれば、進捗度算出部151が、誤差共分散行列Pk+1+の要素のうち、少なくとも一つの要素について、上記要素の値と、上記要素の初期値とに基づいて、誤差推定の進捗度Lconvを算出するので、誤差推定の進捗度を正しく見積もることができるという効果を奏する。
【0112】
この実施の形態における測位装置100(センサ誤差推定装置)は、
進捗度算出部151が、
CPU911などの処理装置を用いて、上記要素の値(推定誤差の分散)Psensorと上記要素の初期値(推定誤差の分散の初期値)Psensor1stとに基づいて、誤差推定の進捗度Lconv=1−Psensor/Psensor1stを算出することを特徴とする。
【0113】
この実施の形態における測位装置100(センサ誤差推定装置)によれば、進捗度算出部151が、Lconv=1−Psennsor/Psensor1stを算出することにより誤差推定の進捗度を算出するので、簡単な計算で進捗度を算出でき、CPU911などの処理装置の資源を有効に活用できるという効果を奏する。
【0114】
この実施の形態における測位装置100(センサ誤差推定装置)は、更に、
初期化終了判定部(信頼性判定部152)を有し、
初期化終了判定部(信頼性判定部152)は、
CPU911などの処理装置を用いて、進捗度算出部151が出力した進捗度情報を入力し、
CPU911などの処理装置を用いて、入力した進捗度情報が示す進捗度Lconvと所定の閾値とを比較して、進捗度Lconvが所定の閾値より大きい場合に、初期化が終了したと判定することを特徴とする。
【0115】
この実施の形態における測位装置100(センサ誤差推定装置)によれば、進捗度算出部151が算出した誤差推定の進捗度Lconvが所定の閾値より大きい場合に、信頼性判定部152が初期化が終了したと判定するので、センサの初期化が終了したか否かを、簡単に判定できるという効果を奏する。
【0116】
この実施の形態における測位装置100(センサ誤差推定装置)は、更に、
受信装置(GPS受信機111)と、距離及び距離変化率観測部112とを有し、
受信装置(GPS受信機111)は、
発信装置(GPS衛星200)が発信した電波(GPS信号)を受信し、
距離及び距離変化率観測部112は、
受信装置(GPS受信機111)が受信した電波(GPS信号)に基づいて、発信装置(GPS衛星200)までの距離(擬似距離)及び距離変化率(擬似距離の変化率)を算出し、算出した距離(擬似距離)及び距離変化率(擬似距離の変化率)を示す情報を距離及び距離変化率情報として出力し、
誤差推定部130は、
CPU911などの処理装置を用いて、距離及び距離変化率観測部112が出力した距離及び距離変化率情報を、観測情報として入力することを特徴とする。
【0117】
この実施の形態における測位装置100(センサ誤差推定装置)によれば、受信装置(GPS受信機111)が受信した電波(GPS信号)に基づいて距離及び距離変化率観測部112が算出した擬似距離及び擬似距離の変化率に基づいて、誤差推定部130が計測誤差を推定し、進捗度算出部151が進捗度を算出するので、推定したセンサの観測計測誤差が信頼できるか否かを判定できるという効果を奏する。
【0118】
この実施の形態における測位装置100(センサ誤差推定装置)は、
速度センサ(車速パルス発生器121)を有し、
速度センサ(車速パルス発生器121)は、
速度を計測し、計測した速度を示す情報を、速度情報として出力し、
誤差推定部130は、
CPU911などの処理装置を用いて、速度センサ(車速パルス発生器121)が出力した速度情報を、計測情報として入力し、
CPU911などの処理装置を用いて、速度センサ(車速パルス発生器121)のスケールファクタ誤差を推定することを特徴とする。
【0119】
この実施の形態における測位装置100(センサ誤差推定装置)によれば、速度センサ(車速パルス発生器121)が計測した速度について、誤差推定部130がスケールファクタ誤差を推定し、進捗度算出部151が進捗度を算出するので、推定したスケールファクタ誤差が信頼できるか否かを判定できるという効果を奏する。
【0120】
この実施の形態における測位装置100(センサ誤差推定装置)は、
角速度センサ(ジャイロスコープ122)を有し、
角速度センサ(ジャイロスコープ122)は、
角速度を計測し、計測した角速度を示す情報を、角速度情報として出力し、
誤差推定部130は、
CPU911などの処理装置を用いて、角速度センサ(ジャイロスコープ122)が出力した角速度情報を、計測情報として入力し、
CPU911などの処理装置を用いて、角速度センサ(ジャイロスコープ122)のスケールファクタ誤差及びバイアス誤差の少なくともいずれかを推定することを特徴とする。
【0121】
この実施の形態における測位装置100(センサ誤差推定装置)によれば、角速度センサ(ジャイロスコープ122)が計測した角速度について、誤差推定部130がスケールファクタ誤差及びバイアス誤差の少なくともいずれかを推定し、進捗度算出部151が進捗度を算出するので、推定したスケールファクタ誤差またはバイアス誤差が信頼できるか否かを判定できるという効果を奏する。
【0122】
この実施の形態における測位装置100(観測装置)は、
情報を処理するCPU911などの処理装置と、センサ(車速パルス発生器121・ジャイロスコープ122)と、誤差推定部130と、進捗度算出部151と、センサ補正部141と、信頼性判定部152とを有し、
センサ(車速パルス発生器121・ジャイロスコープ122)は、
物理量(速度・角速度)を計測し、計測した物理量(速度・角速度)を示す情報を、計測情報(速度情報・角速度情報)として出力し、
誤差推定部130は、
CPU911などの処理装置を用いて、観測量(擬似距離及び擬似距離の変化率)を示す情報を観測情報として入力し、
CPU911などの処理装置を用いて、センサ(車速パルス発生器121・ジャイロスコープ122)が出力した計測情報を入力し、
CPU911などの処理装置を用いて、入力した観測情報(距離及び距離変化率情報)と入力した計測情報(速度情報・角速度情報)とに基づいて、センサ(車速パルス発生器121・ジャイロスコープ122)の計測誤差を推定し、
CPU911などの処理装置を用いて、推定した計測誤差を示す情報を計測誤差情報として出力し、
CPU911などの処理装置を用いて、推定した計測誤差の推定誤差を算出し、
CPU911などの処理装置を用いて、算出した推定誤差を示す情報を推定誤差情報として出力し、
進捗度算出部151は、
CPU911などの処理装置を用いて、誤差推定部130が出力した推定誤差情報を入力し、
CPU911などの処理装置を用いて、入力した推定誤差情報に基づいて、誤差推定の進捗度Lconvを算出し、
CPU911などの処理装置を用いて、算出した進捗度を示す情報を進捗度情報として出力し、
センサ補正部141は、
CPU911などの処理装置を用いて、計測情報(速度情報・角速度情報)と、誤差推定部130が出力した計測誤差情報とを入力し、
CPU911などの処理装置を用いて、入力した計測情報(速度情報・角速度情報)が示す物理量(速度・角速度)を、入力した計測誤差情報が示す計測誤差で補正し、
CPU911などの処理装置を用いて、補正した物理量(速度・角速度)を示す情報(補正速度情報・補正角速度情報)を補正計測情報として出力し、
信頼性判定部152は、
CPU911などの処理装置を用いて、進捗度算出部151が出力した進捗度情報を入力し、
CPU911などの処理装置を用いて、入力した進捗度情報が示す進捗度Lconvに基づいて、センサ補正部141が出力した補正計測情報が信頼できるか否かを判定することを特徴とする。
【0123】
この実施の形態における測位装置100(観測装置)によれば、進捗度算出部151が算出した進捗度Lconvに基づいて、信頼性判定部152が補正計測情報の信頼性を判定するので、補正計測情報が信頼できるか否かを正しく判定できるという効果を奏する。
【0124】
この実施の形態における測位装置100(観測装置)は、
誤差推定部130と、進捗度算出部151と、信頼性判定部152とを有し、
誤差推定部130は、
CPU911などの処理装置を用いて、カルマンフィルタを用いて計測誤差xk+1+を推定し、
CPU911などの処理装置を用いて、カルマンフィルタが算出する誤差共分散行列Pk+1+を示す情報を推定誤差情報として出力し、
進捗度算出部151は、
入力した推定誤差情報が示す誤差共分散行列Pk+1+の要素のうち、少なくとも一つの要素について、CPU911などの処理装置を用いて、上記要素の値Psensorと上記要素の初期値Psensor1stとに基づいて、誤差推定の進捗度Lconv=1−Psensor/Psensor1stを算出し、
信頼性判定部152は、
CPU911などの処理装置を用いて、入力した進捗度情報が示す進捗度Lconvと所定の閾値とを比較して、進捗度Lconvが所定の閾値より大きい場合に、センサ補正部141が出力した補正計測情報が信頼できると判定することを特徴とする。
【0125】
この実施の形態における測位装置100(観測装置)によれば、信頼性判定部152が、進捗度と所定の閾値とを比較して、補正計測情報の信頼性を判定するので、簡単な計算で信頼性を判定でき、CPU911などの処理装置の資源を有効に活用できるという効果を奏する。
【0126】
この実施の形態におえる測位装置100(観測装置)は、更に、
受信装置(GPS受信機111)と、距離及び距離変化率観測部112と、速度センサ(車速パルス発生器121)と、角速度センサ(ジャイロスコープ122)と、位置算出部142とを有し、
受信装置(GPS受信機111)は、
発信装置(GPS衛星200)が発信した電波(GPS信号)を受信し、
距離及び距離変化率観測部112は、
受信装置(GPS受信機111)が受信した電波(GPS信号)に基づいて、発信装置(GPS衛星200)までの距離(擬似距離)及び距離変化率(擬似距離の変化率)を算出し、算出した距離(擬似距離)及び距離変化率(擬似距離の変化率)を示す情報を距離及び距離変化率情報として出力し、
速度センサ(車速パルス発生器121)は、
速度を計測し、計測した速度を示す情報を、速度情報として出力し、
各速度センサ(ジャイロスコープ122)は、
角速度を計測し、計測した角速度を示す情報を、角速度情報として出力し、
誤差推定部130は、
CPU911などの処理装置を用いて、距離及び距離変化率観測部112が出力した距離及び距離変化率情報と、速度センサ(車速パルス発生器121)が出力した速度情報と、角速度センサ(ジャイロスコープ122)が出力した角速度情報とを、計測情報として入力し、
CPU911などの処理装置を用いて、速度センサ(車速パルス発生器121)のスケールファクタ誤差と、角速度センサ(ジャイロスコープ122)のスケールファクタ誤差及びバイアス誤差とを推定し、
センサ補正部141は、
CPU911などの処理装置を用いて、速度情報が示す速度と上記角速度情報が示す角速度とを、誤差推定部130が推定したスケールファクタ誤差及びバイアス誤差で補正し、
位置算出部142は、
CPU911などの処理装置を用いて、センサ補正部141が出力した補正計測情報を入力し、
CPU911などの処理装置を用いて、入力した補正計測情報に基づいて、現在位置を算出することを特徴とする。
【0127】
この実施の形態における測位装置100(観測装置)によれば、センサ補正部141が補正した補正計測情報に基づいて、位置算出部142が位置を算出し、信頼性判定部152が信頼性を判定するので、位置算出部142が算出した現在位置が信頼できるか否かを判定できるという効果を奏する。
【0128】
この実施の形態における測位装置100(センサ誤差推定装置)が計測誤差を推定する方法は、
情報を処理するCPU911などの処理装置と、物理量を計測するセンサ(車速パルス発生器121・ジャイロスコープ122)とを有するセンサ誤差推定装置(測位装置100)が計測誤差を推定する方法において、
CPU911などの処理装置が、観測量(擬似距離及び擬似距離の変化率)を示す情報(距離及び距離変化率情報)を観測情報として入力し、
CPU911などの処理装置が、上記センサ(車速パルス発生器121・ジャイロスコープ122)が計測した物理量(速度・角速度)を示す情報(速度情報・角速度情報)を計測情報として入力し、
CPU911などの処理装置が、入力した観測情報(距離及び距離変化率情報)と入力した計測情報とに基づいて、上記センサの計測誤差を推定し、
CPU911などの処理装置が、推定した計測誤差の推定誤差を算出し、
CPU911などの処理装置が、算出した推定誤差に基づいて、誤差推定の進捗度Lconvを算出し、
CPU911などの処理装置が、算出した進捗度Lconvを示す情報を進捗度情報として出力することを特徴とする。
【0129】
この実施の形態における方法によれば、CPU911などの処理装置が、センサの計測誤差を推定し、推定した計測誤差の推定誤差を算出し、算出した推定誤差に基づいて、誤差推定の進捗度Lconvを算出するので、誤差推定の進捗度を計算により見積もることができるという効果を奏する。
【0130】
この実施の形態における測位装置100(観測装置)が観測する方法は、
情報を処理するCPU911などの処理装置と、物理量を計測するセンサ(車速パルス発生器121・ジャイロスコープ122)とを有する観測装置(測位装置100)が観測する方法において、
CPU911などの処理装置が、観測量(擬似距離及び擬似距離の変化率)を示す情報(距離及び距離変化率情報)を観測情報として入力し、
CPU911などの処理装置が、上記センサ(車速パルス発生器121・ジャイロスコープ122)が計測した物理量(速度・角速度)を示す情報(速度情報・角速度情報)を計測情報として入力し、
CPU911などの処理装置が、入力した観測情報(距離及び距離変化率情報)と計測情報(速度情報・角速度情報)とに基づいて、上記センサ(車速パルス発生器121・ジャイロスコープ122)の計測誤差を推定し、
CPU911などの処理装置が、推定した計測誤差の推定誤差を算出し、
CPU911などの処理装置が、算出した推定誤差に基づいて、誤差推定の進捗度Lconvを算出し、
CPU911などの処理装置が、入力した計測情報が示す物理量(速度・角速度)を、推定した計測誤差で補正し、
CPU911などの処理装置が、補正した物理量(速度・角速度)を示す情報を補正計測情報として出力し、
CPU911などの処理装置が、算出した誤差推定の進捗度Lconvに基づいて、出力した補正計測情報が信頼できるか否かを判定することを特徴とする。
【0131】
この実施の形態における方法によれば、CPU911などの処理装置が、センサの計測誤差を推定し、推定した計測誤差の推定誤差を算出し、算出した推定誤差に基づいて、誤差推定の進捗度Lconvを算出し、算出した誤差推定の進捗度Lconvに基づいて、補正計測情報の信頼性を判定するので、補正計測情報の信頼性を正しく判定できるという効果を奏する。
【0132】
この実施の形態における測位装置100は、情報を処理するCPU911などの処理装置を有するコンピュータをこの実施の形態における測位装置100として機能させるプログラムを、上記コンピュータが実行することにより、実現することができる。
【0133】
この実施の形態におけるプログラムは、
情報を処理するCPU911などの処理装置を有するコンピュータを、この実施の形態における測位装置100(センサ誤差推定装置)として機能させることを特徴とする。
【0134】
この実施の形態におけるプログラムによれば、誤差推定の進捗度を、コンピュータによる計算により見積もることができるという効果を奏する。
【0135】
この実施の形態におけるプログラムは、
情報を処理するCPU911などの処理装置を有するコンピュータを、この実施の形態における測位装置100(観測装置)として機能させることを特徴とする。
【0136】
この実施の形態におけるプログラムによれば、補正計測情報の信頼性を、コンピュータによる計算により判定できるという効果を奏する。
【0137】
この実施の形態における測位装置100(GPS/センサ複合演算測位装置)は、センサ誤差推定計算の収束状況を計算により見積もることを特徴とする。
これにより、GPS/センサ複合演算測位装置において、ジャイロ、車速パルス、加速度センサなどのセンサの誤差推定(初期化)の進行度を計算できる。
また、初期化の進行状況を見積もることができるので、現在のセンサデータの信頼度を推定でき、測位結果の信頼度を推定できる。
【図面の簡単な説明】
【0138】
【図1】実施の形態1における測位システム800の全体構成の一例を示すシステム構成図。
【図2】実施の形態1における測位装置100の外観の一例を示す図。
【図3】実施の形態1における測位装置100のハードウェア資源の一例を示す図。
【図4】実施の形態1における測位装置100の機能ブロックの一例を示すブロック構成図。
【図5】実施の形態1における誤差推定部130が計測誤差を推定するために用いるカルマンフィルタの動作を示す図。
【図6】実施の形態1における誤差推定部130の内部ブロックの構成を示す詳細ブロック図。
【図7】実施の形態1における測位装置100が現在位置を算出する測位処理の流れの一例を示すフローチャート図。
【図8】実施の形態1における進捗度算出部151及び信頼性判定部152を示す図。
【図9】実施の形態1における測位装置100による計測誤差推定の実験結果を示すグラフ図。
【図10】図9に示した実験において、進捗度算出部151が算出した誤差推定の進捗度を示すグラフ図。
【符号の説明】
【0139】
100 測位装置、111 GPS受信機、112 距離及び距離変化率観測部、121 車速パルス発生器、122 ジャイロスコープ、130 誤差推定部、131 遷移行列生成部、132 観測値生成部、133 推定誤差記憶部、134 推定誤差予測部、135 カルマンゲイン算出部、136 推定誤差算出部、137 計測誤差記憶部、138 計測誤差予測部、139 計測誤差推定部、141 センサ補正部、142 位置算出部、151 進捗度算出部、152 信頼性判定部、200 GPS衛星、800 測位システム、901 表示装置、902 キーボード、903 マウス、904 FDD、905 CDD、906 プリンタ装置、907 スキャナ装置、910 システムユニット、911 CPU、912 バス、913 ROM、914 RAM、915 通信装置、920 磁気ディスク装置、921 OS、922 ウィンドウシステム、923 プログラム群、924 ファイル群、931 電話器、932 ファクシミリ機、940 インターネット、941 ゲートウェイ、942 LAN。
【特許請求の範囲】
【請求項1】
情報を処理する処理装置と、
物理量を計測するセンサと、
上記処理装置を用いて、観測量を示す情報を観測情報として入力し、上記処理装置を用いて、入力した観測情報に基づいて、上記センサの計測誤差を推定し、上記処理装置を用いて、推定した計測誤差の推定誤差を算出し、上記処理装置を用いて、算出した推定誤差を示す情報を推定誤差情報として出力する誤差推定部と、
上記処理装置を用いて、上記誤差推定部が出力した推定誤差情報を入力し、上記処理装置を用いて、入力した推定誤差情報に基づいて、誤差推定の進捗度を算出し、上記処理装置を用いて、算出した進捗度を示す情報を進捗度情報として出力する進捗度算出部と、
を有することを特徴とするセンサ誤差推定装置。
【請求項2】
上記誤差推定部は、
上記処理装置を用いて、カルマンフィルタを用いて計測誤差を推定し、上記処理装置を用いて、カルマンフィルタが算出する誤差共分散行列を示す情報を推定誤差情報として出力する
ことを特徴とする請求項1に記載のセンサ誤差推定装置。
【請求項3】
上記進捗度算出部は、
入力した推定誤差情報が示す誤差共分散行列の要素のうち、少なくとも一つの要素について、上記処理装置を用いて、上記要素の値と上記要素の初期値とに基づいて、誤差推定の進捗度を算出する
ことを特徴とする請求項2に記載のセンサ誤差推定装置。
【請求項4】
上記進捗度算出部は、
上記処理装置を用いて、上記要素の値Pと上記要素の初期値P1stとに基づいて、誤差推定の進捗度L=1−P/P1stを算出する
ことを特徴とする請求項3に記載のセンサ誤差推定装置。
【請求項5】
上記センサ誤差推定装置は、更に、
上記処理装置を用いて、上記進捗度算出部が出力した進捗度情報を入力し、上記処理装置を用いて、入力した進捗度情報が示す進捗度と所定の閾値とを比較して、上記進捗度が上記所定の閾値より大きい場合に、初期化が終了したと判定する初期化終了判定部
を有することを特徴とする請求項4に記載のセンサ誤差推定装置。
【請求項6】
上記センサ誤差推定装置は、更に、
発信装置が発信した電波を受信する受信装置と、
上記受信装置が受信した電波に基づいて、上記発信装置までの距離及び距離変化率を算出し、算出した距離及び距離変化率を示す情報を距離及び距離変化率情報として出力する距離及び距離変化率観測部と、
を有し、
上記誤差推定部は、
上記処理装置を用いて、上記距離及び距離変化率観測部が出力した距離及び距離変化率情報を、観測情報として入力する
ことを特徴とする請求項1に記載のセンサ誤差推定装置。
【請求項7】
上記センサは、
速度を計測し、計測した速度を示す情報を、速度情報として出力する速度センサを有し、 上記誤差推定部は、
上記処理装置を用いて、上記速度センサが出力した速度情報を、計測情報として入力し、上記処理装置を用いて、上記速度センサのスケールファクタ誤差を推定する
ことを特徴とする請求項1に記載のセンサ誤差推定装置。
【請求項8】
上記センサは、
角速度を計測し、計測した角速度を示す情報を、角速度情報として出力する角速度センサを有し、 上記誤差推定部は、
上記処理装置を用いて、上記角速度センサが出力した角速度情報を、計測情報として入力し、上記処理装置を用いて、上記角速度センサのスケールファクタ誤差及びバイアス誤差の少なくともいずれかを推定する
ことを特徴とする請求項1に記載のセンサ誤差推定装置。
【請求項9】
情報を処理する処理装置と、
物理量を計測し、計測した物理量を示す情報を計測情報として出力するセンサと、
上記処理装置を用いて、観測量を示す情報を観測情報として入力し、上記センサが出力した計測情報を入力し、上記処理装置を用いて、入力した観測情報と計測情報とに基づいて、上記センサの計測誤差を推定し、上記処理装置を用いて、推定した計測誤差を示す情報を計測誤差情報として出力し、上記処理装置を用いて、推定した計測誤差の推定誤差を算出し、上記処理装置を用いて、算出した推定誤差を示す情報を推定誤差情報として出力する誤差推定部と、
上記処理装置を用いて、上記誤差推定部が出力した推定誤差情報を入力し、上記処理装置を用いて、入力した推定誤差情報に基づいて、誤差推定の進捗度を算出し、上記処理装置を用いて、算出した進捗度を示す情報を進捗度情報として出力する進捗度算出部と、
上記処理装置を用いて、上記センサが出力した計測情報と、上記誤差推定部が出力した計測誤差情報とを入力し、上記処理装置を用いて、入力した計測情報が示す物理量を、入力した計測誤差情報が示す計測誤差で補正し、上記処理装置を用いて、補正した物理量を示す情報を補正計測情報として出力するセンサ補正部と、
上記処理装置を用いて、上記進捗度算出部が出力した進捗度情報を入力し、上記処理装置を用いて、入力した進捗度情報が示す進捗度に基づいて、上記センサ補正部が出力した補正計測情報が信頼できるか否かを判定する信頼性判定部と、
を有することを特徴とする観測装置。
【請求項10】
上記誤差推定部は、
上記処理装置を用いて、カルマンフィルタを用いて計測誤差を推定し、上記処理装置を用いて、カルマンフィルタが算出する誤差共分散行列を示す情報を推定誤差情報として出力し、
上記進捗度算出部は、
入力した推定誤差情報が示す誤差共分散行列の要素のうち、少なくとも一つの要素について、上記処理装置を用いて、上記要素の値Pと上記要素の初期値P1stとに基づいて、誤差推定の進捗度L=1−P/P1stを算出し、
上記信頼性判定部は、
上記処理装置を用いて、入力した進捗度情報が示す進捗度と所定の閾値とを比較して、上記進捗度が上記所定の閾値より大きい場合に、上記センサ補正部が出力した補正計測情報が信頼できると判定する
ことを特徴とする請求項9に記載の観測装置。
【請求項11】
上記観測装置は、更に、
発信装置が発信した電波を受信する受信装置と、
上記受信装置が受信した電波に基づいて、上記発信装置までの距離及び距離変化率を算出し、算出した距離及び距離変化率を示す情報を距離及び距離変化率情報として出力する距離及び距離変化率観測部を有し、
上記センサは、
速度を計測し、観測した速度を示す情報を、速度情報として出力する速度センサと、角速度を観測し、観測した角速度を示す情報を、角速度情報として出力する角速度センサとを有し、
上記誤差推定部は、
上記処理装置を用いて、上記距離及び距離変化率観測部が出力した距離及び距離変化率情報を観測情報として入力し、上記速度センサが出力した速度情報と、上記角速度センサが出力した角速度情報とを、計測情報として入力し、上記処理装置を用いて、上記速度センサのスケールファクタ誤差と、上記角速度センサのスケールファクタ誤差及びバイアス誤差とを推定し、
上記センサ補正部は、
上記処理装置を用いて、上記速度情報が示す速度と上記角速度情報が示す角速度とを、上記誤差推定部が推定したスケールファクタ誤差及びバイアス誤差で補正し、
上記観測装置は、更に、
上記処理装置を用いて、上記センサ補正部が出力した補正計測情報を入力し、上記処理装置を用いて、入力した補正計測情報に基づいて、現在位置を算出する位置算出部を有する
ことを特徴とする請求項10に記載の観測装置。
【請求項12】
情報を処理する処理装置と、物理量を計測するセンサとを有するセンサ誤差推定装置が上記センサの計測誤差を推定する方法において、
上記処理装置が、観測量を示す情報を観測情報として入力し、
上記処理装置が、入力した観測情報に基づいて、上記センサの計測誤差を推定し、
上記処理装置が、推定した計測誤差の推定誤差を算出し、
上記処理装置が、算出した推定誤差に基づいて、誤差推定の進捗度を算出し、
上記処理装置が、算出した進捗度を示す情報を進捗度情報として出力する
ことを特徴とする方法。
【請求項13】
情報を処理する処理装置と、物理量を計測するセンサとを有する観測装置が観測する方法において、
上記処理装置が、観測量を示す情報を観測情報として入力し、
上記処理装置が、上記センサが計測した物理量を示す情報を計測情報として入力し、
上記処理装置が、入力した観測情報と入力した計測情報とに基づいて、上記センサの計測誤差を推定し、
上記処理装置が、推定した計測誤差の推定誤差を算出し、
上記処理装置が、算出した推定誤差に基づいて、誤差推定の進捗度を算出し、
上記処理装置が、入力した計測情報が示す物理量を、推定した計測誤差で補正し、
上記処理装置が、補正した物理量を示す情報を補正計測情報として出力し、
上記処理装置が、算出した誤差推定の進捗度に基づいて、出力した補正計測情報が信頼できるか否かを判定する
ことを特徴とする方法。
【請求項14】
情報を処理する処理装置を有するコンピュータを、請求項1に記載のセンサ誤差推定装置として機能させることを特徴とするプログラム。
【請求項15】
情報を処理する処理装置を有するコンピュータを、請求項9に記載の観測装置として機能させることを特徴とするプログラム。
【請求項1】
情報を処理する処理装置と、
物理量を計測するセンサと、
上記処理装置を用いて、観測量を示す情報を観測情報として入力し、上記処理装置を用いて、入力した観測情報に基づいて、上記センサの計測誤差を推定し、上記処理装置を用いて、推定した計測誤差の推定誤差を算出し、上記処理装置を用いて、算出した推定誤差を示す情報を推定誤差情報として出力する誤差推定部と、
上記処理装置を用いて、上記誤差推定部が出力した推定誤差情報を入力し、上記処理装置を用いて、入力した推定誤差情報に基づいて、誤差推定の進捗度を算出し、上記処理装置を用いて、算出した進捗度を示す情報を進捗度情報として出力する進捗度算出部と、
を有することを特徴とするセンサ誤差推定装置。
【請求項2】
上記誤差推定部は、
上記処理装置を用いて、カルマンフィルタを用いて計測誤差を推定し、上記処理装置を用いて、カルマンフィルタが算出する誤差共分散行列を示す情報を推定誤差情報として出力する
ことを特徴とする請求項1に記載のセンサ誤差推定装置。
【請求項3】
上記進捗度算出部は、
入力した推定誤差情報が示す誤差共分散行列の要素のうち、少なくとも一つの要素について、上記処理装置を用いて、上記要素の値と上記要素の初期値とに基づいて、誤差推定の進捗度を算出する
ことを特徴とする請求項2に記載のセンサ誤差推定装置。
【請求項4】
上記進捗度算出部は、
上記処理装置を用いて、上記要素の値Pと上記要素の初期値P1stとに基づいて、誤差推定の進捗度L=1−P/P1stを算出する
ことを特徴とする請求項3に記載のセンサ誤差推定装置。
【請求項5】
上記センサ誤差推定装置は、更に、
上記処理装置を用いて、上記進捗度算出部が出力した進捗度情報を入力し、上記処理装置を用いて、入力した進捗度情報が示す進捗度と所定の閾値とを比較して、上記進捗度が上記所定の閾値より大きい場合に、初期化が終了したと判定する初期化終了判定部
を有することを特徴とする請求項4に記載のセンサ誤差推定装置。
【請求項6】
上記センサ誤差推定装置は、更に、
発信装置が発信した電波を受信する受信装置と、
上記受信装置が受信した電波に基づいて、上記発信装置までの距離及び距離変化率を算出し、算出した距離及び距離変化率を示す情報を距離及び距離変化率情報として出力する距離及び距離変化率観測部と、
を有し、
上記誤差推定部は、
上記処理装置を用いて、上記距離及び距離変化率観測部が出力した距離及び距離変化率情報を、観測情報として入力する
ことを特徴とする請求項1に記載のセンサ誤差推定装置。
【請求項7】
上記センサは、
速度を計測し、計測した速度を示す情報を、速度情報として出力する速度センサを有し、 上記誤差推定部は、
上記処理装置を用いて、上記速度センサが出力した速度情報を、計測情報として入力し、上記処理装置を用いて、上記速度センサのスケールファクタ誤差を推定する
ことを特徴とする請求項1に記載のセンサ誤差推定装置。
【請求項8】
上記センサは、
角速度を計測し、計測した角速度を示す情報を、角速度情報として出力する角速度センサを有し、 上記誤差推定部は、
上記処理装置を用いて、上記角速度センサが出力した角速度情報を、計測情報として入力し、上記処理装置を用いて、上記角速度センサのスケールファクタ誤差及びバイアス誤差の少なくともいずれかを推定する
ことを特徴とする請求項1に記載のセンサ誤差推定装置。
【請求項9】
情報を処理する処理装置と、
物理量を計測し、計測した物理量を示す情報を計測情報として出力するセンサと、
上記処理装置を用いて、観測量を示す情報を観測情報として入力し、上記センサが出力した計測情報を入力し、上記処理装置を用いて、入力した観測情報と計測情報とに基づいて、上記センサの計測誤差を推定し、上記処理装置を用いて、推定した計測誤差を示す情報を計測誤差情報として出力し、上記処理装置を用いて、推定した計測誤差の推定誤差を算出し、上記処理装置を用いて、算出した推定誤差を示す情報を推定誤差情報として出力する誤差推定部と、
上記処理装置を用いて、上記誤差推定部が出力した推定誤差情報を入力し、上記処理装置を用いて、入力した推定誤差情報に基づいて、誤差推定の進捗度を算出し、上記処理装置を用いて、算出した進捗度を示す情報を進捗度情報として出力する進捗度算出部と、
上記処理装置を用いて、上記センサが出力した計測情報と、上記誤差推定部が出力した計測誤差情報とを入力し、上記処理装置を用いて、入力した計測情報が示す物理量を、入力した計測誤差情報が示す計測誤差で補正し、上記処理装置を用いて、補正した物理量を示す情報を補正計測情報として出力するセンサ補正部と、
上記処理装置を用いて、上記進捗度算出部が出力した進捗度情報を入力し、上記処理装置を用いて、入力した進捗度情報が示す進捗度に基づいて、上記センサ補正部が出力した補正計測情報が信頼できるか否かを判定する信頼性判定部と、
を有することを特徴とする観測装置。
【請求項10】
上記誤差推定部は、
上記処理装置を用いて、カルマンフィルタを用いて計測誤差を推定し、上記処理装置を用いて、カルマンフィルタが算出する誤差共分散行列を示す情報を推定誤差情報として出力し、
上記進捗度算出部は、
入力した推定誤差情報が示す誤差共分散行列の要素のうち、少なくとも一つの要素について、上記処理装置を用いて、上記要素の値Pと上記要素の初期値P1stとに基づいて、誤差推定の進捗度L=1−P/P1stを算出し、
上記信頼性判定部は、
上記処理装置を用いて、入力した進捗度情報が示す進捗度と所定の閾値とを比較して、上記進捗度が上記所定の閾値より大きい場合に、上記センサ補正部が出力した補正計測情報が信頼できると判定する
ことを特徴とする請求項9に記載の観測装置。
【請求項11】
上記観測装置は、更に、
発信装置が発信した電波を受信する受信装置と、
上記受信装置が受信した電波に基づいて、上記発信装置までの距離及び距離変化率を算出し、算出した距離及び距離変化率を示す情報を距離及び距離変化率情報として出力する距離及び距離変化率観測部を有し、
上記センサは、
速度を計測し、観測した速度を示す情報を、速度情報として出力する速度センサと、角速度を観測し、観測した角速度を示す情報を、角速度情報として出力する角速度センサとを有し、
上記誤差推定部は、
上記処理装置を用いて、上記距離及び距離変化率観測部が出力した距離及び距離変化率情報を観測情報として入力し、上記速度センサが出力した速度情報と、上記角速度センサが出力した角速度情報とを、計測情報として入力し、上記処理装置を用いて、上記速度センサのスケールファクタ誤差と、上記角速度センサのスケールファクタ誤差及びバイアス誤差とを推定し、
上記センサ補正部は、
上記処理装置を用いて、上記速度情報が示す速度と上記角速度情報が示す角速度とを、上記誤差推定部が推定したスケールファクタ誤差及びバイアス誤差で補正し、
上記観測装置は、更に、
上記処理装置を用いて、上記センサ補正部が出力した補正計測情報を入力し、上記処理装置を用いて、入力した補正計測情報に基づいて、現在位置を算出する位置算出部を有する
ことを特徴とする請求項10に記載の観測装置。
【請求項12】
情報を処理する処理装置と、物理量を計測するセンサとを有するセンサ誤差推定装置が上記センサの計測誤差を推定する方法において、
上記処理装置が、観測量を示す情報を観測情報として入力し、
上記処理装置が、入力した観測情報に基づいて、上記センサの計測誤差を推定し、
上記処理装置が、推定した計測誤差の推定誤差を算出し、
上記処理装置が、算出した推定誤差に基づいて、誤差推定の進捗度を算出し、
上記処理装置が、算出した進捗度を示す情報を進捗度情報として出力する
ことを特徴とする方法。
【請求項13】
情報を処理する処理装置と、物理量を計測するセンサとを有する観測装置が観測する方法において、
上記処理装置が、観測量を示す情報を観測情報として入力し、
上記処理装置が、上記センサが計測した物理量を示す情報を計測情報として入力し、
上記処理装置が、入力した観測情報と入力した計測情報とに基づいて、上記センサの計測誤差を推定し、
上記処理装置が、推定した計測誤差の推定誤差を算出し、
上記処理装置が、算出した推定誤差に基づいて、誤差推定の進捗度を算出し、
上記処理装置が、入力した計測情報が示す物理量を、推定した計測誤差で補正し、
上記処理装置が、補正した物理量を示す情報を補正計測情報として出力し、
上記処理装置が、算出した誤差推定の進捗度に基づいて、出力した補正計測情報が信頼できるか否かを判定する
ことを特徴とする方法。
【請求項14】
情報を処理する処理装置を有するコンピュータを、請求項1に記載のセンサ誤差推定装置として機能させることを特徴とするプログラム。
【請求項15】
情報を処理する処理装置を有するコンピュータを、請求項9に記載の観測装置として機能させることを特徴とするプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2008−175721(P2008−175721A)
【公開日】平成20年7月31日(2008.7.31)
【国際特許分類】
【出願番号】特願2007−10163(P2007−10163)
【出願日】平成19年1月19日(2007.1.19)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成20年7月31日(2008.7.31)
【国際特許分類】
【出願日】平成19年1月19日(2007.1.19)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]