
センサ誤差補正装置及び方法、傾斜測定装置並びにアンテナ制御システム
【課題】微小な傾斜角度に関しても傾斜センサで高精度に検出可能とするためのセンサ誤差補正装置及び方法、傾斜測定装置、並びにアンテナ制御システムを提供する。
【解決手段】センサ誤差補正装置100は、傾斜センサ200を設置平面内で回転させる駆動部101と、傾斜センサ200の出力電圧が最大値又は最小値を示す回転角に対して90度ずれた回転角を算出する基準角度検出部102と、算出した回転角における出力電圧を基準値として傾斜センサ200の出力を補正する出力補正部103とを有する。
【解決手段】センサ誤差補正装置100は、傾斜センサ200を設置平面内で回転させる駆動部101と、傾斜センサ200の出力電圧が最大値又は最小値を示す回転角に対して90度ずれた回転角を算出する基準角度検出部102と、算出した回転角における出力電圧を基準値として傾斜センサ200の出力を補正する出力補正部103とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、アナログ傾斜センサの基準電圧値の誤差を補正するセンサ誤差補正装置及び方法、傾斜測定装置並びにアンテナ制御システムに関する。
【背景技術】
【0002】
衛星通信を行うアンテナを搭載する移動体において、アンテナを衛星角度に指向させる場合には、アンテナが固定される座標系と、衛星角度の算出に用いられる地平座標系との相対的な傾きを検出する必要がある。
【0003】
地平座標系に対するアンテナ固定座標面の傾斜の検出には、直交するピッチ軸とロール軸との2軸にセンサを用いている。各々のセンサは検出角度をアナログ電圧で検出する。
【0004】
アンテナを衛星方向に回転する際には、アンテナ固定座標におけるアンテナ指向角度を地平座標系での角度に座標変換しつつ衛星角度に近づけていく。この座標変換にピッチ軸とロール軸のセンサが検出した角度を利用している。
【0005】
このような傾き検出方法には次のような問題がある。
【0006】
ピッチ軸とロール軸とのセンサのアナログ出力電圧は、基準電圧を中心値として、傾く方向によりプラス方向とマイナス方向とに出力電圧が変化する。センサの出力電圧は温度依存性があり傾斜検出時の環境により電圧が変化する。これにセンサ自体の個体差が加わり、基準電圧に誤差を生じる。
【0007】
一方、センサの検出感度は低いため基準電圧の誤差が測定量に及ぼす影響は無視できない大きさとなる。衛星捕捉のためには、アンテナ固定座標の傾斜を0.1度単位よりも高い精度で検出する必要があるが、アンテナが衛星角度を目標に回転しても誤差によって実際の衛星方向に向かず、電波を受信できない問題が発生する。
【0008】
この場合は、周辺の角度をサーチするため、通信回線の確保が遅れシステムの即時性が損なわれる。
【0009】
車両にアンテナを搭載した車載局など、移動して運用することを前提とした衛星通信地球局において、運用性向上や運用開始までの時間短縮は、速報性を重視するニュースや災害情報を伝達する目的上重要な要素となる。
【0010】
すなわち、車両に搭載された傾斜センサは、経年変化、使用温度環境、個体差などにより、傾斜を与えられていない水平状態における基準出力値にずれが生じる。アナログ電圧出力の傾斜センサは感度が低いため、水平においた状態における基準出力電圧に誤差があると、傾斜を与えた場合の出力電圧を傾斜角度の換算する場合の誤差が大きくなる。このため、出力された検出角度を利用して車両の傾斜を補正しながら衛星角度にアンテナを指向させるまでの時間が長くなるという問題があった。
【0011】
傾斜センサの感度を高めることを目的とする関連技術として、特許文献1に開示される「位置検出装置および傾斜センサ」がある。特許文献1に開示される発明は、二つの傾斜センサを90度ずらして配置し、高い感度を示すセンサからの出力を傾斜角度に応じて選択することにより、傾斜角度の検出精度を高めるものである。
【特許文献1】特開平9−81308号公報(0172段落、図38)
【発明の開示】
【発明が解決しようとする課題】
【0012】
しかし、衛星通信における車載局などでは、そもそも傾斜センサの感度が低下するほどの急勾配に停車してアンテナ操作を行うことは現実的ではない。また、車両等を停止した状態でアンテナを衛星方向に向ける操作を行うため、アンテナ固定面と平行面との傾きを検出する際に加速度を考慮する必要がない。
また、特許文献1に記載の発明は、二つの傾斜センサを傾斜角度に応じて切り替えて用いるため、それぞれの傾斜センサの個体差による誤差の発生は避けられない。すなわち、特許文献1に記載の発明は、傾斜角度が45度を超え得るような用途に関して言えば傾斜角度の検出精度向上が期待できるものの、車載局におけるアンテナの衛星方向への指向精度の向上目的などのように、傾斜角度が小さい場合においてその検出精度を高めることはできない。
【0013】
本発明は係る問題に鑑みてなされたものであり、微小な傾斜角度に関しても傾斜センサで高精度に検出可能とするためのセンサ誤差補正装置及び方法、傾斜測定装置、並びにアンテナ制御システムを提供することを目的とする。
【課題を解決するための手段】
【0014】
上記目的を達成するため、本発明は、第1の態様として、傾斜センサを設置平面内で回転させる手段と、傾斜センサの出力電圧が最大値又は最小値を示す回転角に対して90度ずれた回転角を算出する手段と、算出した回転角における出力電圧を基準値として傾斜センサの出力を補正する手段とを有することを特徴とするセンサ誤差補正装置を提供するものである。
【0015】
また、上記目的を達成するため、本発明は、第2の態様として、上記本発明の第1の態様に係るセンサ誤差補正装置と傾斜センサとを備えることを特徴とする傾斜測定装置を提供するものである。
【0016】
また、上記目的を達成するため、本発明は、第3の態様として、上記本発明の第2の態様に係る傾斜測定装置と、指向性のアンテナと、アンテナの指向方向を任意の方位角及び仰角へ制御する制御装置とを備えたアンテナ制御システムであって、制御装置は、傾斜センサの補正された出力に基づいて、アンテナの指向方向を制御することを特徴とするアンテナ制御システムを提供するものである。
【0017】
また、上記目的を達成するため、本発明は、第4の態様として、傾斜センサを設置平面内で回転させ、傾斜センサの出力電圧が最大値又は最小値を示す回転角に対して90度ずれた回転角を算出し、算出した回転角における出力電圧を基準値として傾斜センサの出力を補正することを特徴とするセンサ誤差補正方法を提供するものである。
【発明の効果】
【0018】
本発明によれば、微小な傾斜角度に関しても傾斜センサで高精度に検出可能とするためのセンサ誤差補正装置及び方法、傾斜測定装置、並びにアンテナ制御システムを提供できる。
【発明を実施するための最良の形態】
【0019】
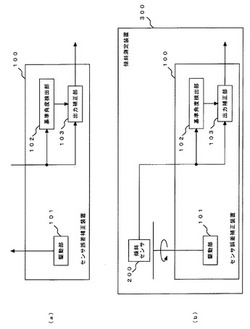
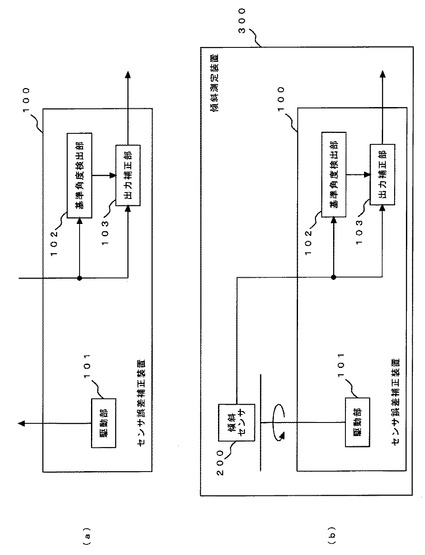
図1(a)に、本発明に係るセンサ誤差補正装置の構成を示す。センサ誤差測定装置100は、傾斜センサを設置平面内で回転させる駆動部101と、傾斜センサの出力電圧が最大値又は最小値を示す回転角に対して90度ずれた回転角を算出する基準角度検出部102と、算出した回転角における出力電圧を基準値として傾斜センサの出力を補正する出力補正部103とを有する。図1(b)に示すように、センサ誤差補正装置100は、傾斜センサ200とともに傾斜測定装置300として用いられる。
【0020】
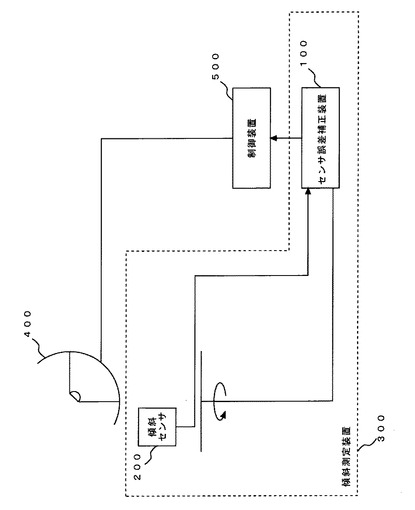
図2に示すように、傾斜測定装置300は、指向性のアンテナ400と、アンテナ400の指向方向を任意の方位角及び仰角へ制御する制御装置500とを備え、制御装置500が、傾斜センサ200の補正された出力に基づいてアンテナ400の指向方向を制御するアンテナ制御システムに適用可能である。
【0021】
以下、本発明の好適な実施の形態について図面を用いて説明する。
【0022】
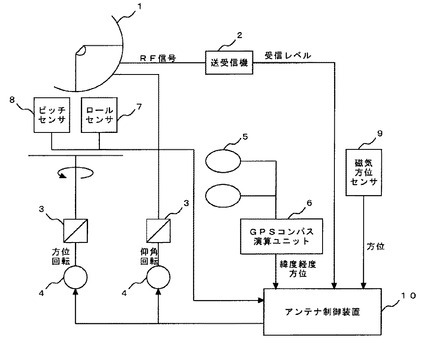
本発明の好適な実施の形態について説明する。図3に、本実施形態に係る通信用衛星の捕捉システムの構成を示す。この捕捉システムは、車両等の移動体に搭載されるシステムである。
【0023】
衛星通信用アンテナ1は、方位角度と仰角との駆動軸を有する。車両移動中は、仰角を下げた格納状態であり、使用場所に車両を停車、固定した後に衛星方向に回転して電波を受信する。回転時には衛星通信用アンテナ1の指向方向を方位角度と仰角との駆動軸を回転させて調整する。衛星通信用アンテナ1は、図2におけるアンテナ400に相当する。
【0024】
送受信機2は、衛星から受信したRF信号を処理し、受信レベル信号をアンテナ制御装置10に出力する。アンテナ制御装置10は、受信レベルが増加した場合に、衛星通信用アンテナ1が衛星の方向に向いたと判断する。モータ4は、アンテナ制御装置10からの速度指令によりアンテナの方位角度、仰角を変化させる、減速機3は、モータ4からのアンテナ駆動軸への回転指令を減速する。減速機3及びモータ4は、方位角用と仰角用との2系統が設けられている。
【0025】
GPS用アンテナ5は、GPS衛星からの電波を受信して信号をGPSコンパス演算ユニット6に入力する。GPSコンパス演算ユニット6は、複数のGPS用アンテナの受信信号の位相差を処理して真北を基準とした方位角度を演算し、緯度経度情報と共にシリアル通信を通じてアンテナ制御装置10に伝送する。
【0026】
ロールセンサ7、ピッチセンサ8は1軸の傾斜センサであり、傾いた路面に車両が停止した場合に、地平座標に対する衛星通信用アンテナ1の設置座標の傾斜角度を計測しアンテナ制御装置10へ出力する。二つのセンサの検出軸は直交しており、車両の前後方向の傾きをピッチセンサ8が、車両の左右方向の傾きをロールセンサ7が検出する。非検出軸が0度の場合の出力電圧に対する、非検出軸を傾斜させた場合の出力の変化は小さいものである。換言すると、ロールセンサ7及びピッチセンサ8は、他方のセンサの検出軸方向に傾斜したとしても、出力はほとんど変化しない。ロールセンサ7及びピッチセンサ8は、図1(b)、図2における傾斜センサ200に相当する。
【0027】
検出した傾斜角度は、衛星通信用アンテナ1の方位回転面を基準とするアンテナ固定座標系と、衛星の方位角度、仰角の算出基準となる地平座標系との間の座標回転角度を表し、衛星通信用アンテナ1が格納状態から衛星方向へ指向するまでに要する回転量へ影響を与える。すなわち、衛星通信用アンテナ1が格納状態から衛星方向へ指向するまでに要する回転量には、アンテナ固定座標系と地平座標系とのずれを補正する分の回転量を含める必要がある。
【0028】
磁気方位センサ9は、GPSコンパス演算ユニット6が方位角度を算出するのに必要なGPS衛星数を受信できない場合に、バックアップとして検出した方位角度をアンテナ制御装置10に出力する。
【0029】
アンテナ制御装置10は、車両が停止した場所の緯度経度と衛星軌道とから地平座標を基準とする衛星角度を算出し、衛星通信用アンテナ1を衛星角度に回転駆動する。アンテナ回転中はロールセンサ7、ピッチセンサ8の傾斜角度を利用してアンテナ固定座標上で回転する衛星通信用アンテナ1の指向角度を地平座標における角度に変換する。電源投入時には、GPSコンパス演算ユニット6との通信を行い、衛星通信用アンテナ1の緯度経度とアンテナ格納時のアンテナ指向方向とを取得する。アンテナ制御装置10は、図1、図2におけるセンサ誤差補正装置100及び図2における制御装置500に相当する。
【0030】
本実施形態に係る通信用衛星捕捉システムの動作について説明する。
衛星捕捉を行う場所に車両を停止した後、アンテナ制御装置10はGPSコンパス演算ユニット6から取得した緯度経度の情報と、受信する衛星の経度とを使用して、衛星通信用アンテナ1の目標角度となる衛星方位角度と衛星仰角とを算出する。
【0031】
次に、GPSコンパス演算ユニット6及び磁気方位センサ9から絶対方位角度を取得して、衛星通信用アンテナ1が回転する前の状態の時に指向している基準方位角度を得る。仰角は、衛星通信用アンテナ1が格納されている状態の角度を基準仰角とする。
【0032】
その後、衛星通信用アンテナ1を衛星方向に向けるために方位軸、仰角軸回りに回転させる。アンテナ制御装置10は各駆動軸の回転量を常時把握し、基準の方位角度と仰角に加算してアンテナ固定座標上におけるアンテナ指向角度を算出する。
【0033】
次に、ロールセンサ7、ピッチセンサ8の検出角度を使ってアンテナ固定座標上におけるアンテナ指向角度を地平座標上の指向角度に変換し目的とする衛星角度と比較して角度誤差を算出する。そして、角度誤差が小さくなる方向に方位軸、仰角軸を回転させる。
【0034】
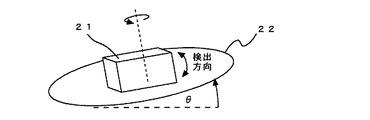
ロールセンサ7、ピッチセンサ8の誤差校正は、前述の衛星捕捉に前に行う。図4を参照して説明する。ロールセンサ7又はピッチセンサ8を図4のセンサ21とする。センサ21は、衛星通信用アンテナ1のアンテナ固定座標面と平行な設置面22の上に設置される。設置面22は、衛星通信用アンテナ1の方位軸上にあるため、方位角度を回転するとセンサ21が回転する。車両を斜面に停車した場合、設置面22が傾斜した状態となる。傾斜角度(図4のθ)は、センサ21の検出範囲内とする。なお、ここではセンサ21が衛星通信用アンテナ1の方位軸上にある場合を例としているが、方位軸からの距離を一定に保って回転させることができれば、センサ21は必ずしも方位軸上に設置されていなくても良い。
【0035】
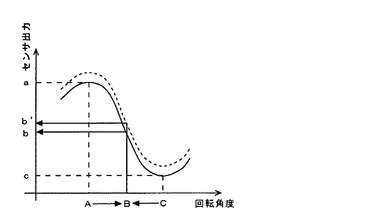
衛星通信用アンテナ1の方位角度を回転するとアンテナ固定面上で回転し、図5のようなセンサ21の出力波形が得られる。180度以上回転すると出力波形の最大値又は最小値の少なくとも一方が検出される。図5の横軸は、図4の設置面22の回転角度、縦軸は図4のセンサ21の出力電圧を示す。実線のグラフを測定値を、点線は仕様値をそれぞれ示す。測定値では回転角度Aに対する出力電圧がa、回転角度Bに対する出力電圧がb、回転角度Cに対する出力電圧がcとなる。
【0036】
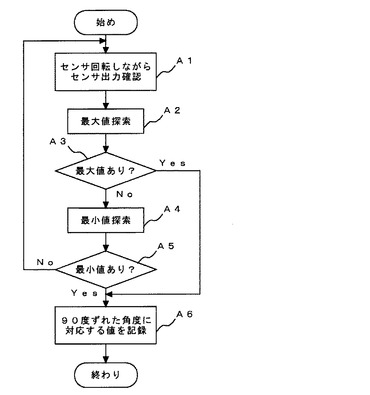
次に、図6を参照して真の基準電圧(図5のb)を求める手順について説明する。
まず、図5に示すようなセンサ21の出力波形を得る(ステップA1)。次に、出力波形を元にセンサの出力の極大値(図5のa点)の検出を試みる(ステップA2)。続いて、極大値の有無を判断する(ステップA3)。極大値が見つかった場合は(ステップA3/Yes)、図5のA点をデータ取得範囲内で90度ずらし図5のB点に対応するb点の値を確認する(ステップA6)。データの範囲内であれば90度ずらす方向はどちら側でも良い。
極大値が見つからなかった場合は(ステップA3/No)、極小値を検索する(ステップA4)。その後、極小値の有無を判断し(ステップA5)、極小値が見つからなかった場合にはステップA1へ戻ってデータを取り直す。極小値が見つかった場合は取得したデータの範囲内で回転角度を90度ずらしてセンサ出力(図5のb点)を確認する(ステップA6)。データの範囲内であれば90度ずらす方向はどちら側でも良い。
【0037】
以上の処理により、本来図5に点線で示す特性を持つセンサ出力が実線で示す特性に変化していても、基準電圧値(図5のb)を求めることで正しい傾斜角度を求められる。
【0038】
このように、傾斜センサ(ロールセンサ7、ピッチセンサ8)の誤差校正の際には、傾斜センサから検出範囲内の出力が得られる傾きを与えながら傾斜センサの取り付け面を180度以上回転させる。この際、回転中心から傾斜センサまでの距離は一定に保つ。そして、回転中に回転角度と傾斜センサの出力電圧とを記録する。出力電圧が最大又は最小となる回転角度から90度分オフセットした回転角度に対応する出力電圧が傾斜センサの基準出力となる。
以後は、求めた基準出力を傾斜センサの出力電圧から差し引いた値を、所定の検出感度を用いて傾斜角度に換算する。
【0039】
このように、本実施形態に係る通信衛星の補足システムは、測定器を使用することなくセンサ自身の出力電圧を基に基準電圧出力値を検出し測定誤差を低減できる。これは、基準状態からずれたセンサであっても最大180度回転させればグラフ上の処理で機械的に真の基準電圧を求められるためである。
【0040】
また、センサ出力を受ける後段の回路が持つオフセット誤差も補償できる。
さらに、センサ回転面の傾斜角度(図4のθ)が既知の場合はセンサの感度を測定できる。これは、図5の基準電圧値に対する極大値又は極小値の差分若しくは、極大値と極小値との差の半分が傾斜角度に相当し、感度を計算できるためである。
【0041】
なお、図3に示す構成において、傾斜角度(図4のθ)は未知の場合が多い。傾斜角度が未知の場合は感度の校正ができないため、ロールセンサ7、ピッチセンサ8の感度に誤差が含まれ、衛星通信用アンテナ1を衛星角度に駆動してもアンテナ固定座標を地平座標へ変換する際に利用するロールセンサ7、ピッチセンサ8の検出角度がずれているため衛星通信用アンテナ1の指向角度が衛星角度からずれる。
【0042】
このような場合でも基準電圧が既知であれば、ロールセンサ7、ピッチセンサ8の検出角度の符号の誤りを無くし、感度の誤差に起因する絶対値の誤差を残すことができる。例えば、本来は0Vであるセンサの基準電圧が−1Vに変化しており、センサの出力が−0.7Vであった場合、基準電圧が既知であるならば出力電圧を+0.3Vに補正できる。従って、衛星通信用アンテナ1の指向角度を衛星角度に調整した角度量を記憶しておくことにより角度量がゼロとなるようなセンサの感度を逆算することが可能となる。
【0043】
なお、上記実施形態は本発明の好適な実施の一例であり、本発明はこれに限定されることはなく、様々な変形が可能である。
【図面の簡単な説明】
【0044】
【図1】本発明に係るセンサ誤差補正装置及び傾斜測定装置の構成を示す図である。
【図2】本発明に係るアンテナ制御システムの構成を示す図である。
【図3】本発明の好適な実施の形態に係る衛星補足システムの構成を示す図である。
【図4】傾斜センサの誤差を校正する状態を示す図である。
【図5】誤差校正時の傾斜センサの出力を示す図である。
【図6】傾斜センサの誤差校正の手順を示す図である。
【符号の説明】
【0045】
1 衛星通信用アンテナ
2 送受信機
3 減速機
4 モータ
5 GPS用アンテナ
6 GPSコンパス演算ユニット
7 ロールセンサ
8 ピッチセンサ
9 磁気方位センサ
10 アンテナ制御装置
21、200 傾斜センサ
22 設置面
100 センサ誤差補正装置
101 駆動部
102 基準角度検出部
103 出力補正部
300 傾斜測定装置
400 アンテナ
500 制御装置
【技術分野】
【0001】
本発明は、アナログ傾斜センサの基準電圧値の誤差を補正するセンサ誤差補正装置及び方法、傾斜測定装置並びにアンテナ制御システムに関する。
【背景技術】
【0002】
衛星通信を行うアンテナを搭載する移動体において、アンテナを衛星角度に指向させる場合には、アンテナが固定される座標系と、衛星角度の算出に用いられる地平座標系との相対的な傾きを検出する必要がある。
【0003】
地平座標系に対するアンテナ固定座標面の傾斜の検出には、直交するピッチ軸とロール軸との2軸にセンサを用いている。各々のセンサは検出角度をアナログ電圧で検出する。
【0004】
アンテナを衛星方向に回転する際には、アンテナ固定座標におけるアンテナ指向角度を地平座標系での角度に座標変換しつつ衛星角度に近づけていく。この座標変換にピッチ軸とロール軸のセンサが検出した角度を利用している。
【0005】
このような傾き検出方法には次のような問題がある。
【0006】
ピッチ軸とロール軸とのセンサのアナログ出力電圧は、基準電圧を中心値として、傾く方向によりプラス方向とマイナス方向とに出力電圧が変化する。センサの出力電圧は温度依存性があり傾斜検出時の環境により電圧が変化する。これにセンサ自体の個体差が加わり、基準電圧に誤差を生じる。
【0007】
一方、センサの検出感度は低いため基準電圧の誤差が測定量に及ぼす影響は無視できない大きさとなる。衛星捕捉のためには、アンテナ固定座標の傾斜を0.1度単位よりも高い精度で検出する必要があるが、アンテナが衛星角度を目標に回転しても誤差によって実際の衛星方向に向かず、電波を受信できない問題が発生する。
【0008】
この場合は、周辺の角度をサーチするため、通信回線の確保が遅れシステムの即時性が損なわれる。
【0009】
車両にアンテナを搭載した車載局など、移動して運用することを前提とした衛星通信地球局において、運用性向上や運用開始までの時間短縮は、速報性を重視するニュースや災害情報を伝達する目的上重要な要素となる。
【0010】
すなわち、車両に搭載された傾斜センサは、経年変化、使用温度環境、個体差などにより、傾斜を与えられていない水平状態における基準出力値にずれが生じる。アナログ電圧出力の傾斜センサは感度が低いため、水平においた状態における基準出力電圧に誤差があると、傾斜を与えた場合の出力電圧を傾斜角度の換算する場合の誤差が大きくなる。このため、出力された検出角度を利用して車両の傾斜を補正しながら衛星角度にアンテナを指向させるまでの時間が長くなるという問題があった。
【0011】
傾斜センサの感度を高めることを目的とする関連技術として、特許文献1に開示される「位置検出装置および傾斜センサ」がある。特許文献1に開示される発明は、二つの傾斜センサを90度ずらして配置し、高い感度を示すセンサからの出力を傾斜角度に応じて選択することにより、傾斜角度の検出精度を高めるものである。
【特許文献1】特開平9−81308号公報(0172段落、図38)
【発明の開示】
【発明が解決しようとする課題】
【0012】
しかし、衛星通信における車載局などでは、そもそも傾斜センサの感度が低下するほどの急勾配に停車してアンテナ操作を行うことは現実的ではない。また、車両等を停止した状態でアンテナを衛星方向に向ける操作を行うため、アンテナ固定面と平行面との傾きを検出する際に加速度を考慮する必要がない。
また、特許文献1に記載の発明は、二つの傾斜センサを傾斜角度に応じて切り替えて用いるため、それぞれの傾斜センサの個体差による誤差の発生は避けられない。すなわち、特許文献1に記載の発明は、傾斜角度が45度を超え得るような用途に関して言えば傾斜角度の検出精度向上が期待できるものの、車載局におけるアンテナの衛星方向への指向精度の向上目的などのように、傾斜角度が小さい場合においてその検出精度を高めることはできない。
【0013】
本発明は係る問題に鑑みてなされたものであり、微小な傾斜角度に関しても傾斜センサで高精度に検出可能とするためのセンサ誤差補正装置及び方法、傾斜測定装置、並びにアンテナ制御システムを提供することを目的とする。
【課題を解決するための手段】
【0014】
上記目的を達成するため、本発明は、第1の態様として、傾斜センサを設置平面内で回転させる手段と、傾斜センサの出力電圧が最大値又は最小値を示す回転角に対して90度ずれた回転角を算出する手段と、算出した回転角における出力電圧を基準値として傾斜センサの出力を補正する手段とを有することを特徴とするセンサ誤差補正装置を提供するものである。
【0015】
また、上記目的を達成するため、本発明は、第2の態様として、上記本発明の第1の態様に係るセンサ誤差補正装置と傾斜センサとを備えることを特徴とする傾斜測定装置を提供するものである。
【0016】
また、上記目的を達成するため、本発明は、第3の態様として、上記本発明の第2の態様に係る傾斜測定装置と、指向性のアンテナと、アンテナの指向方向を任意の方位角及び仰角へ制御する制御装置とを備えたアンテナ制御システムであって、制御装置は、傾斜センサの補正された出力に基づいて、アンテナの指向方向を制御することを特徴とするアンテナ制御システムを提供するものである。
【0017】
また、上記目的を達成するため、本発明は、第4の態様として、傾斜センサを設置平面内で回転させ、傾斜センサの出力電圧が最大値又は最小値を示す回転角に対して90度ずれた回転角を算出し、算出した回転角における出力電圧を基準値として傾斜センサの出力を補正することを特徴とするセンサ誤差補正方法を提供するものである。
【発明の効果】
【0018】
本発明によれば、微小な傾斜角度に関しても傾斜センサで高精度に検出可能とするためのセンサ誤差補正装置及び方法、傾斜測定装置、並びにアンテナ制御システムを提供できる。
【発明を実施するための最良の形態】
【0019】
図1(a)に、本発明に係るセンサ誤差補正装置の構成を示す。センサ誤差測定装置100は、傾斜センサを設置平面内で回転させる駆動部101と、傾斜センサの出力電圧が最大値又は最小値を示す回転角に対して90度ずれた回転角を算出する基準角度検出部102と、算出した回転角における出力電圧を基準値として傾斜センサの出力を補正する出力補正部103とを有する。図1(b)に示すように、センサ誤差補正装置100は、傾斜センサ200とともに傾斜測定装置300として用いられる。
【0020】
図2に示すように、傾斜測定装置300は、指向性のアンテナ400と、アンテナ400の指向方向を任意の方位角及び仰角へ制御する制御装置500とを備え、制御装置500が、傾斜センサ200の補正された出力に基づいてアンテナ400の指向方向を制御するアンテナ制御システムに適用可能である。
【0021】
以下、本発明の好適な実施の形態について図面を用いて説明する。
【0022】
本発明の好適な実施の形態について説明する。図3に、本実施形態に係る通信用衛星の捕捉システムの構成を示す。この捕捉システムは、車両等の移動体に搭載されるシステムである。
【0023】
衛星通信用アンテナ1は、方位角度と仰角との駆動軸を有する。車両移動中は、仰角を下げた格納状態であり、使用場所に車両を停車、固定した後に衛星方向に回転して電波を受信する。回転時には衛星通信用アンテナ1の指向方向を方位角度と仰角との駆動軸を回転させて調整する。衛星通信用アンテナ1は、図2におけるアンテナ400に相当する。
【0024】
送受信機2は、衛星から受信したRF信号を処理し、受信レベル信号をアンテナ制御装置10に出力する。アンテナ制御装置10は、受信レベルが増加した場合に、衛星通信用アンテナ1が衛星の方向に向いたと判断する。モータ4は、アンテナ制御装置10からの速度指令によりアンテナの方位角度、仰角を変化させる、減速機3は、モータ4からのアンテナ駆動軸への回転指令を減速する。減速機3及びモータ4は、方位角用と仰角用との2系統が設けられている。
【0025】
GPS用アンテナ5は、GPS衛星からの電波を受信して信号をGPSコンパス演算ユニット6に入力する。GPSコンパス演算ユニット6は、複数のGPS用アンテナの受信信号の位相差を処理して真北を基準とした方位角度を演算し、緯度経度情報と共にシリアル通信を通じてアンテナ制御装置10に伝送する。
【0026】
ロールセンサ7、ピッチセンサ8は1軸の傾斜センサであり、傾いた路面に車両が停止した場合に、地平座標に対する衛星通信用アンテナ1の設置座標の傾斜角度を計測しアンテナ制御装置10へ出力する。二つのセンサの検出軸は直交しており、車両の前後方向の傾きをピッチセンサ8が、車両の左右方向の傾きをロールセンサ7が検出する。非検出軸が0度の場合の出力電圧に対する、非検出軸を傾斜させた場合の出力の変化は小さいものである。換言すると、ロールセンサ7及びピッチセンサ8は、他方のセンサの検出軸方向に傾斜したとしても、出力はほとんど変化しない。ロールセンサ7及びピッチセンサ8は、図1(b)、図2における傾斜センサ200に相当する。
【0027】
検出した傾斜角度は、衛星通信用アンテナ1の方位回転面を基準とするアンテナ固定座標系と、衛星の方位角度、仰角の算出基準となる地平座標系との間の座標回転角度を表し、衛星通信用アンテナ1が格納状態から衛星方向へ指向するまでに要する回転量へ影響を与える。すなわち、衛星通信用アンテナ1が格納状態から衛星方向へ指向するまでに要する回転量には、アンテナ固定座標系と地平座標系とのずれを補正する分の回転量を含める必要がある。
【0028】
磁気方位センサ9は、GPSコンパス演算ユニット6が方位角度を算出するのに必要なGPS衛星数を受信できない場合に、バックアップとして検出した方位角度をアンテナ制御装置10に出力する。
【0029】
アンテナ制御装置10は、車両が停止した場所の緯度経度と衛星軌道とから地平座標を基準とする衛星角度を算出し、衛星通信用アンテナ1を衛星角度に回転駆動する。アンテナ回転中はロールセンサ7、ピッチセンサ8の傾斜角度を利用してアンテナ固定座標上で回転する衛星通信用アンテナ1の指向角度を地平座標における角度に変換する。電源投入時には、GPSコンパス演算ユニット6との通信を行い、衛星通信用アンテナ1の緯度経度とアンテナ格納時のアンテナ指向方向とを取得する。アンテナ制御装置10は、図1、図2におけるセンサ誤差補正装置100及び図2における制御装置500に相当する。
【0030】
本実施形態に係る通信用衛星捕捉システムの動作について説明する。
衛星捕捉を行う場所に車両を停止した後、アンテナ制御装置10はGPSコンパス演算ユニット6から取得した緯度経度の情報と、受信する衛星の経度とを使用して、衛星通信用アンテナ1の目標角度となる衛星方位角度と衛星仰角とを算出する。
【0031】
次に、GPSコンパス演算ユニット6及び磁気方位センサ9から絶対方位角度を取得して、衛星通信用アンテナ1が回転する前の状態の時に指向している基準方位角度を得る。仰角は、衛星通信用アンテナ1が格納されている状態の角度を基準仰角とする。
【0032】
その後、衛星通信用アンテナ1を衛星方向に向けるために方位軸、仰角軸回りに回転させる。アンテナ制御装置10は各駆動軸の回転量を常時把握し、基準の方位角度と仰角に加算してアンテナ固定座標上におけるアンテナ指向角度を算出する。
【0033】
次に、ロールセンサ7、ピッチセンサ8の検出角度を使ってアンテナ固定座標上におけるアンテナ指向角度を地平座標上の指向角度に変換し目的とする衛星角度と比較して角度誤差を算出する。そして、角度誤差が小さくなる方向に方位軸、仰角軸を回転させる。
【0034】
ロールセンサ7、ピッチセンサ8の誤差校正は、前述の衛星捕捉に前に行う。図4を参照して説明する。ロールセンサ7又はピッチセンサ8を図4のセンサ21とする。センサ21は、衛星通信用アンテナ1のアンテナ固定座標面と平行な設置面22の上に設置される。設置面22は、衛星通信用アンテナ1の方位軸上にあるため、方位角度を回転するとセンサ21が回転する。車両を斜面に停車した場合、設置面22が傾斜した状態となる。傾斜角度(図4のθ)は、センサ21の検出範囲内とする。なお、ここではセンサ21が衛星通信用アンテナ1の方位軸上にある場合を例としているが、方位軸からの距離を一定に保って回転させることができれば、センサ21は必ずしも方位軸上に設置されていなくても良い。
【0035】
衛星通信用アンテナ1の方位角度を回転するとアンテナ固定面上で回転し、図5のようなセンサ21の出力波形が得られる。180度以上回転すると出力波形の最大値又は最小値の少なくとも一方が検出される。図5の横軸は、図4の設置面22の回転角度、縦軸は図4のセンサ21の出力電圧を示す。実線のグラフを測定値を、点線は仕様値をそれぞれ示す。測定値では回転角度Aに対する出力電圧がa、回転角度Bに対する出力電圧がb、回転角度Cに対する出力電圧がcとなる。
【0036】
次に、図6を参照して真の基準電圧(図5のb)を求める手順について説明する。
まず、図5に示すようなセンサ21の出力波形を得る(ステップA1)。次に、出力波形を元にセンサの出力の極大値(図5のa点)の検出を試みる(ステップA2)。続いて、極大値の有無を判断する(ステップA3)。極大値が見つかった場合は(ステップA3/Yes)、図5のA点をデータ取得範囲内で90度ずらし図5のB点に対応するb点の値を確認する(ステップA6)。データの範囲内であれば90度ずらす方向はどちら側でも良い。
極大値が見つからなかった場合は(ステップA3/No)、極小値を検索する(ステップA4)。その後、極小値の有無を判断し(ステップA5)、極小値が見つからなかった場合にはステップA1へ戻ってデータを取り直す。極小値が見つかった場合は取得したデータの範囲内で回転角度を90度ずらしてセンサ出力(図5のb点)を確認する(ステップA6)。データの範囲内であれば90度ずらす方向はどちら側でも良い。
【0037】
以上の処理により、本来図5に点線で示す特性を持つセンサ出力が実線で示す特性に変化していても、基準電圧値(図5のb)を求めることで正しい傾斜角度を求められる。
【0038】
このように、傾斜センサ(ロールセンサ7、ピッチセンサ8)の誤差校正の際には、傾斜センサから検出範囲内の出力が得られる傾きを与えながら傾斜センサの取り付け面を180度以上回転させる。この際、回転中心から傾斜センサまでの距離は一定に保つ。そして、回転中に回転角度と傾斜センサの出力電圧とを記録する。出力電圧が最大又は最小となる回転角度から90度分オフセットした回転角度に対応する出力電圧が傾斜センサの基準出力となる。
以後は、求めた基準出力を傾斜センサの出力電圧から差し引いた値を、所定の検出感度を用いて傾斜角度に換算する。
【0039】
このように、本実施形態に係る通信衛星の補足システムは、測定器を使用することなくセンサ自身の出力電圧を基に基準電圧出力値を検出し測定誤差を低減できる。これは、基準状態からずれたセンサであっても最大180度回転させればグラフ上の処理で機械的に真の基準電圧を求められるためである。
【0040】
また、センサ出力を受ける後段の回路が持つオフセット誤差も補償できる。
さらに、センサ回転面の傾斜角度(図4のθ)が既知の場合はセンサの感度を測定できる。これは、図5の基準電圧値に対する極大値又は極小値の差分若しくは、極大値と極小値との差の半分が傾斜角度に相当し、感度を計算できるためである。
【0041】
なお、図3に示す構成において、傾斜角度(図4のθ)は未知の場合が多い。傾斜角度が未知の場合は感度の校正ができないため、ロールセンサ7、ピッチセンサ8の感度に誤差が含まれ、衛星通信用アンテナ1を衛星角度に駆動してもアンテナ固定座標を地平座標へ変換する際に利用するロールセンサ7、ピッチセンサ8の検出角度がずれているため衛星通信用アンテナ1の指向角度が衛星角度からずれる。
【0042】
このような場合でも基準電圧が既知であれば、ロールセンサ7、ピッチセンサ8の検出角度の符号の誤りを無くし、感度の誤差に起因する絶対値の誤差を残すことができる。例えば、本来は0Vであるセンサの基準電圧が−1Vに変化しており、センサの出力が−0.7Vであった場合、基準電圧が既知であるならば出力電圧を+0.3Vに補正できる。従って、衛星通信用アンテナ1の指向角度を衛星角度に調整した角度量を記憶しておくことにより角度量がゼロとなるようなセンサの感度を逆算することが可能となる。
【0043】
なお、上記実施形態は本発明の好適な実施の一例であり、本発明はこれに限定されることはなく、様々な変形が可能である。
【図面の簡単な説明】
【0044】
【図1】本発明に係るセンサ誤差補正装置及び傾斜測定装置の構成を示す図である。
【図2】本発明に係るアンテナ制御システムの構成を示す図である。
【図3】本発明の好適な実施の形態に係る衛星補足システムの構成を示す図である。
【図4】傾斜センサの誤差を校正する状態を示す図である。
【図5】誤差校正時の傾斜センサの出力を示す図である。
【図6】傾斜センサの誤差校正の手順を示す図である。
【符号の説明】
【0045】
1 衛星通信用アンテナ
2 送受信機
3 減速機
4 モータ
5 GPS用アンテナ
6 GPSコンパス演算ユニット
7 ロールセンサ
8 ピッチセンサ
9 磁気方位センサ
10 アンテナ制御装置
21、200 傾斜センサ
22 設置面
100 センサ誤差補正装置
101 駆動部
102 基準角度検出部
103 出力補正部
300 傾斜測定装置
400 アンテナ
500 制御装置
【特許請求の範囲】
【請求項1】
傾斜センサを設置平面内で回転させる手段と、
前記傾斜センサの出力電圧が最大値又は最小値を示す回転角に対して90度ずれた回転角を算出する手段と、
算出した回転角における出力電圧を基準値として前記傾斜センサの出力を補正する手段とを有することを特徴とするセンサ誤差補正装置。
【請求項2】
前記傾斜センサを設置平面内で180度以上回転させながら出力電圧を観測することにより、前記傾斜センサの出力電圧が最大値又は最小値を示す回転角を検出することを特徴とする請求項1記載のセンサ誤差補正装置。
【請求項3】
前記設置平面の傾き角が既知である場合の前記傾斜センサの出力電圧を基に、前記傾斜センサの感度を検出する手段を有することを特徴とする請求項1又は2記載のセンサ誤差補正装置。
【請求項4】
請求項1から3の何れか1項記載のセンサ誤差補正装置と前記傾斜センサとを備えることを特徴とする傾斜測定装置。
【請求項5】
請求項4記載の傾斜測定装置と、
指向性のアンテナと、
前記アンテナの指向方向を任意の方位角及び仰角へ制御する制御装置とを備えたアンテナ制御システムであって、
前記制御装置は、前記傾斜センサの補正された出力に基づいて、前記アンテナの指向方向を制御することを特徴とするアンテナ制御システム。
【請求項6】
GPS信号を受信する手段と、
受信した前記GPS信号を基に、前記アンテナの指向方向を算出する手段とを有することを特徴とする請求項5記載のアンテナ制御システム。
【請求項7】
地磁気を検出する磁気方位センサを有し、該磁気方位センサの出力も前記アンテナの指向方向の決定に用いることを特徴とする請求項6記載のアンテナ制御システム。
【請求項8】
傾斜センサを設置平面内で回転させ、
前記傾斜センサの出力電圧が最大値又は最小値を示す回転角に対して90度ずれた回転角を算出し、
算出した回転角における出力電圧を基準値として前記傾斜センサの出力を補正することを特徴とするセンサ誤差補正方法。
【請求項9】
前記傾斜センサを設置平面内で180度以上回転させながら出力電圧を観測することにより、前記傾斜センサの出力電圧が最大値又は最小値を示す回転角を検出することを特徴とする請求項8記載のセンサ誤差補正方法。
【請求項10】
前記設置平面の傾き角が既知である場合の前記傾斜センサの出力電圧を基に、前記傾斜センサの感度を検出することを特徴とする請求項8又は9記載のセンサ誤差補正方法。
【請求項1】
傾斜センサを設置平面内で回転させる手段と、
前記傾斜センサの出力電圧が最大値又は最小値を示す回転角に対して90度ずれた回転角を算出する手段と、
算出した回転角における出力電圧を基準値として前記傾斜センサの出力を補正する手段とを有することを特徴とするセンサ誤差補正装置。
【請求項2】
前記傾斜センサを設置平面内で180度以上回転させながら出力電圧を観測することにより、前記傾斜センサの出力電圧が最大値又は最小値を示す回転角を検出することを特徴とする請求項1記載のセンサ誤差補正装置。
【請求項3】
前記設置平面の傾き角が既知である場合の前記傾斜センサの出力電圧を基に、前記傾斜センサの感度を検出する手段を有することを特徴とする請求項1又は2記載のセンサ誤差補正装置。
【請求項4】
請求項1から3の何れか1項記載のセンサ誤差補正装置と前記傾斜センサとを備えることを特徴とする傾斜測定装置。
【請求項5】
請求項4記載の傾斜測定装置と、
指向性のアンテナと、
前記アンテナの指向方向を任意の方位角及び仰角へ制御する制御装置とを備えたアンテナ制御システムであって、
前記制御装置は、前記傾斜センサの補正された出力に基づいて、前記アンテナの指向方向を制御することを特徴とするアンテナ制御システム。
【請求項6】
GPS信号を受信する手段と、
受信した前記GPS信号を基に、前記アンテナの指向方向を算出する手段とを有することを特徴とする請求項5記載のアンテナ制御システム。
【請求項7】
地磁気を検出する磁気方位センサを有し、該磁気方位センサの出力も前記アンテナの指向方向の決定に用いることを特徴とする請求項6記載のアンテナ制御システム。
【請求項8】
傾斜センサを設置平面内で回転させ、
前記傾斜センサの出力電圧が最大値又は最小値を示す回転角に対して90度ずれた回転角を算出し、
算出した回転角における出力電圧を基準値として前記傾斜センサの出力を補正することを特徴とするセンサ誤差補正方法。
【請求項9】
前記傾斜センサを設置平面内で180度以上回転させながら出力電圧を観測することにより、前記傾斜センサの出力電圧が最大値又は最小値を示す回転角を検出することを特徴とする請求項8記載のセンサ誤差補正方法。
【請求項10】
前記設置平面の傾き角が既知である場合の前記傾斜センサの出力電圧を基に、前記傾斜センサの感度を検出することを特徴とする請求項8又は9記載のセンサ誤差補正方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2010−32359(P2010−32359A)
【公開日】平成22年2月12日(2010.2.12)
【国際特許分類】
【出願番号】特願2008−194744(P2008−194744)
【出願日】平成20年7月29日(2008.7.29)
【出願人】(000004237)日本電気株式会社 (19,353)
【Fターム(参考)】
【公開日】平成22年2月12日(2010.2.12)
【国際特許分類】
【出願日】平成20年7月29日(2008.7.29)
【出願人】(000004237)日本電気株式会社 (19,353)
【Fターム(参考)】
[ Back to top ]