
センサ誤差較正システム
【課題】観測空間の位置・観測条件によりセンサの観測誤差が異なる場合にも、高精度に誤差補正を行う。
【解決手段】基準位置情報に基づいて観測空間の位置を算出し、センサ3を制御するセンサ制御手段8と、基準目標1の観測位置情報および基準位置情報に基づいて観測誤差・誤差補正値を算出する観測誤差算出手段10と、基準位置情報に基づく飛翔経路情報・観測環境情報を含む観測条件、観測空間の位置および誤差補正値を関連付けて蓄積する情報蓄積器12と、観測目標の飛翔経路情報・観測環境情報を含む観測条件および当該観測位置情報に基づく観測空間の位置に基づいて、情報蓄積器12から誤差補正値を抽出する観測誤差補正値最適化手段16と、抽出された誤差補正値を用いて、センサ3により観測された観測目標の位置を補正する観測誤差補正手段17とを備えた。
【解決手段】基準位置情報に基づいて観測空間の位置を算出し、センサ3を制御するセンサ制御手段8と、基準目標1の観測位置情報および基準位置情報に基づいて観測誤差・誤差補正値を算出する観測誤差算出手段10と、基準位置情報に基づく飛翔経路情報・観測環境情報を含む観測条件、観測空間の位置および誤差補正値を関連付けて蓄積する情報蓄積器12と、観測目標の飛翔経路情報・観測環境情報を含む観測条件および当該観測位置情報に基づく観測空間の位置に基づいて、情報蓄積器12から誤差補正値を抽出する観測誤差補正値最適化手段16と、抽出された誤差補正値を用いて、センサ3により観測された観測目標の位置を補正する観測誤差補正手段17とを備えた。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、センサの観測誤差を予め測定して誤差補正値を算出・蓄積し、蓄積した誤差補正値を用いて、実際に観測された位置を補正するセンサ誤差較正システムに関するものである。
【背景技術】
【0002】
従来のセンサ誤差較正システムでは、観測目標の位置を観測するセンサに対して、センサの設置位置誤差、方位測角誤差および3軸バイアス誤差を測定または推定している(例えば特許文献1,2参照)。そして、センサにより観測された観測目標の位置に対して、測定・推定した一定の設置位置誤差、方位測角度誤差および3軸バイアス誤差を用いて補正を行い、ユーザに高精度な観測位置情報を提供している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平8−271619号公報
【特許文献2】特開2008−175683号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述したように特許文献1,2に開示される従来のセンサ誤差較正システムでは、誤差が常に一定であるとして補正を行っている。しかしながら、遠方の目標を観測するセンサでは、大気屈折等の影響で観測空間の位置(センサを中心とした観測目標の方位、仰角や距離等)によって補正すべき誤差の大きさが異なる。また、この大気屈折による影響は観測条件(センサが観測している期間での気温、海温、湿度や気候等の観測環境情報や観測目標の飛翔経路情報等)によっても異なる。そのため、このようなセンサに対して特許文献1,2に開示される従来のセンサ誤差較正システムを適用した場合、誤差補正精度が悪化してしまうという課題があった。
【0005】
この発明は、上記のような課題を解決するためになされたもので、観測空間の位置・観測条件によりセンサの観測誤差が異なる場合にも、高精度に誤差補正を行うことができるセンサ誤差較正システムを提供することを目的としている。
【課題を解決するための手段】
【0006】
この発明に係るセンサ誤差較正システムは、センサにより観測された観測目標の位置を示す観測位置情報を受信する観測位置入力手段と、センサの観測誤差を測定する際に当該センサが観測目標として観測する、基準目標の位置を示す基準位置情報を受信する基準位置入力手段と、センサが観測している期間での観測環境情報を取得する観測環境取得手段と、基準位置入力手段により受信された基準位置情報に基づいて、センサに対する観測空間の位置を算出し、当該センサの動作を制御するセンサ制御手段と、観測位置入力手段により受信された、センサ制御手段による制御に従い動作したセンサからの基準目標の観測位置情報、および、基準位置入力手段により受信された基準位置情報に基づいて、当該センサの観測誤差を算出し、誤差補正値を算出する観測誤差算出手段と、基準位置入力手段により受信された基準位置情報に基づく飛翔経路情報および観測環境取得手段により取得されたセンサが基準目標を観測した際の観測環境情報を含む観測条件、センサ制御手段により算出された当該センサに対する観測空間の位置、および、観測誤差算出手段により算出された誤差補正値を関連付けて蓄積する情報蓄積器と、観測位置入力手段により受信された観測目標の観測位置情報に基づく飛翔経路情報または予測された飛翔経路情報、および観測環境取得手段により取得されたセンサが観測目標を観測した際の観測環境情報を含む観測条件、および、当該観測位置情報に基づく当該センサに対する観測空間の位置に基づいて、情報蓄積器から誤差補正値を抽出する観測誤差補正値最適化手段と、観測誤差補正値最適化手段により抽出された誤差補正値を用いて、当該センサにより観測された観測目標の位置を補正する観測誤差補正手段とを備えたものである。
【発明の効果】
【0007】
この発明によれば、上記のように構成したので、観測空間の位置・観測条件によりセンサの観測誤差が異なる場合にも、高精度に誤差補正を行うことができる。
【図面の簡単な説明】
【0008】
【図1】この発明の実施の形態1に係るセンサ誤差較正システムが適用されたセンサネットワークシステムの構成を示す図である。
【図2】この発明の実施の形態1に係る中央装置の構成を示す図である。
【図3】この発明の実施の形態1に係る中央装置による観測誤差測定計画作成動作を示すフローチャートである。
【図4】この発明の実施の形態1に係る中央装置による観測誤差測定・誤差補正値算出動作を示すフローチャートである。
【図5】この発明の実施の形態1に係る中央装置による誤差補正動作を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、この発明の実施の形態について図面を参照しながら詳細に説明する。
実施の形態1.
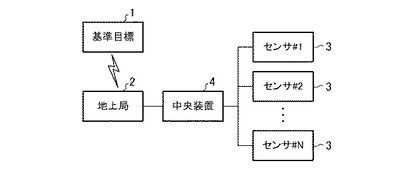
図1はこの発明の実施の形態1に係るセンサ誤差較正システムが適用されたセンサネットワークシステムの構成を示す図である。
センサネットワークシステムは、図1に示すように、基準目標1、地上局2、センサ(♯1〜♯N)3および中央装置4から構成されている。
【0010】
基準目標1は、所定の観測空間の位置・観測条件において、センサ3の観測誤差を測定する際に、センサ3が観測目標として観測する対象となるものであり、例えば人工衛星等が挙げられる。なお、観測空間の位置とは、センサ3を中心とした観測目標の方位、仰角や距離等である。また、観測条件とは、センサ3が観測している期間での気温、海温、湿度や気候等の観測環境情報や観測目標の飛翔経路情報等である。また、基準目標1は、自己の位置を高精度に検出することが可能なGPS等の自己位置検出手段を有している。この基準目標1により検出された自己の位置を示す情報(基準位置情報)は地上局2に送信される。
地上局2は、基準目標1から基準位置情報を受信し、中央装置4に送信するものである。
【0011】
センサ3は、中央装置4の後述するセンサ制御手段8により生成された制御計画に従い、観測目標の位置を観測するものであり、単体または複数設けられている(図1,2ではN個のセンサ♯1〜♯Nを示している)。なお、センサ3は、観測誤差測定の場合には、観測目標として基準目標1を観測する。このセンサ3により観測された観測目標の位置を示す情報(観測位置情報)は中央装置4の後述する観測位置入力手段9に送信される。
【0012】
中央装置4は、地上局2から受信した基準位置情報およびセンサ3から受信した基準目標1の観測位置情報に基づいて、観測空間の位置・観測条件ごとのセンサ3の観測誤差測定および誤差補正値の算出・蓄積を行うものである。また、中央装置4は、センサ3が実際に観測目標を観測した際には、このセンサ3に対する観測空間の位置・観測条件に応じた誤差補正値を抽出し、センサ3により観測された観測目標の位置を補正する。
【0013】
次に、中央装置4の構成について説明する。
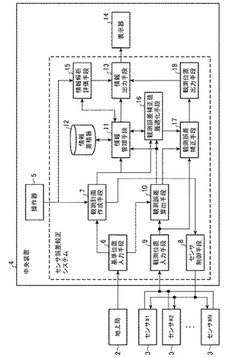
図2はこの発明の実施形態1による中央装置4を示す機能構成図である。
中央装置4は、図2に示すように、操作器5、基準位置入力手段6、観測計画作成手段(観測環境取得手段)7、センサ制御手段8、観測位置入力手段9、観測誤差算出手段10、情報管理手段11、情報蓄積器12、情報出力手段13、表示器14、情報解析評価手段15、観測誤差補正値最適化手段16、観測誤差補正手段17および観測位置出力手段18から構成されている。なおセンサ誤差較正システムは、中央装置4の操作器5および表示器14を除いた各機能部から構成されている。
【0014】
操作器5は、観測環境情報、計画条件、情報解析評価条件、観測計画や観測目標の飛翔経路情報等のユーザ入力を受け付けるものである。ここで、計画条件とは、センサ3の観測誤差を測定する際に対象・対象外とするセンサ3や、観測誤差測定対象のセンサ3が基準目標1を観測する期間等である。また、情報解析評価条件とは、情報解析評価手段15において観測誤差の解析・評価を行う際に用いる解析対象や解析手段等である。また、観測計画とは、実際に観測目標を観測する際に対象とするセンサ3や、観測対象のセンサ3が観測目標を観測する期間等である。
【0015】
基準位置入力手段6は、地上局2から基準位置情報を受信するものである。なお、基準目標1が移動する場合には、基準位置入力手段6は、取得した基準位置情報から基準目標1の予測軌道を算出するようにしてもよい。
【0016】
観測計画作成手段7は、操作器5から取得した、センサ3が基準目標1を観測する際の計画条件、および、基準位置入力手段6から取得した基準位置情報(または基準目標1の予測軌道情報)に基づいて、観測誤差測定計画を作成するものである。この観測誤差測定計画には、観測誤差測定対象のセンサ3が基準目標1を観測可能な期間を示す情報が含まれている。また、観測計画作成手段7は、操作器5から、センサ3が観測目標を観測している期間での観測環境情報および観測計画も取得する。さらに、操作器5を介してユーザにより予測された観測目標の飛翔経路情報が入力された場合には、この情報も取得する。そして、観測計画作成手段7は、取得した観測環境情報、観測計画や飛翔経路情報を、相関評価値を算出する際に利用できるように、データ化(数値化)する。
【0017】
センサ制御手段8は、観測計画作成手段7から取得した観測誤差測定計画または観測計画に基づいて、制御計画を作成し、各センサ3を制御するものである。この制御計画には、センサ3が基準目標1を観測する際のセンサ3に対する観測空間の位置や制御タイミング等が含まれている。
【0018】
観測位置入力手段9は、センサ3から観測目標の観測位置情報を受信するものである。なお、センサ3の観測誤差を測定する際には、観測位置入力手段9は、センサ3から基準目標1の観測位置情報を受信する。
【0019】
観測誤差算出手段10は、基準位置入力手段6から取得した基準位置情報および観測位置入力手段9から取得した基準目標1の観測位置情報に基づいて、センサ3の観測誤差を算出するものである。また、観測誤差算出手段10は、算出した観測誤差に基づいて、実際にセンサ3が観測目標を観測した際に使用する誤差補正値を算出する。
【0020】
情報管理手段11は、情報蓄積器12に蓄積される情報を管理するものである。この情報管理手段11は、観測計画作成手段7から取得した観測誤差測定計画および観測条件(基準位置情報に基づく基準目標1の飛翔距離情報、および、センサ3が基準目標1を観測した際の観測環境情報)、観測誤差算出手段10から取得した観測誤差および誤差補正値、この誤差補正値を算出する際に用いた基準位置情報(または予測軌道情報)および基準目標1の観測位置情報を関連付けて情報蓄積器12に蓄積させる。また、情報管理手段11は、情報解析評価手段15から取得した観測誤差の解析・評価を示す情報も情報蓄積器12に蓄積させる。
情報蓄積器12は、情報管理手段11を介して取得した各種情報を蓄積するものである。
【0021】
情報出力手段13は、情報管理手段11を介して情報蓄積器12から取得した情報、情報解析評価手段15から取得した観測誤差の解析・評価を示す情報や、観測位置出力手段18から取得した、誤差補正された観測目標の観測位置情報を表示器14に出力するものである。
表示器14は、情報出力手段13から取得した情報を表示するものである。
情報解析評価手段15は、操作器5から取得した情報解析評価条件に基づいて、情報蓄積器12から該当する情報を抽出し、観測誤差の解析・評価を行うものである。
【0022】
観測誤差補正値最適化手段16は、観測位置入力手段9から取得した観測目標の観測位置情報に基づくセンサ3に対する観測空間の位置、および、観測条件(観測位置情報に基づく観測目標の飛翔経路情報または観測計画作成手段7から取得した予測された観測目標の飛翔経路情報、および、観測計画作成手段7から取得した、センサ3がこの観測目標を観測した際の観測環境情報)に基づいて、この観測空間の位置・観測条件に対応した最適な誤差補正値を情報管理手段11を介して情報蓄積器12から抽出するものである。
【0023】
観測誤差補正手段17は、観測誤差補正値最適化手段16から取得した誤差補正値を用いて、観測位置入力手段9から取得した、センサ3により観測された観測目標の位置を補正するものである。
観測位置出力手段18は、観測誤差補正手段17から取得した観測位置情報を情報出力手段13に出力するものである。
【0024】
次に、上記のように構成された中央装置4の動作について説明する。
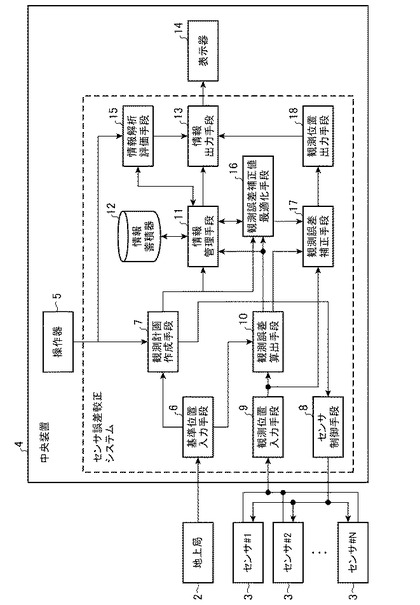
まず、観測誤差測定計画を作成する際の中央装置4による動作を図3のフローチャートを参照しながら説明する。
中央装置4による観測誤差測定計画作成動作では、図3に示すように、まず、観測計画作成手段7は、操作器5を介して、ユーザにより入力された計画条件を取得する(ステップST31)。すなわち、ユーザは、センサ3の観測誤差を測定する際に対象・対象外とするセンサ3および観測誤差測定対象のセンサ3が基準目標1を観測する期間等の情報を計画条件として入力し、観測計画作成手段7はこの計画条件を取得する。これにより、例えば「○月○日○時から△月△日△時の間にセンサ♯□もしくはセンサ♯■を使用して観測誤差を測定したい」等という計画条件を取得することができる。
【0025】
次いで、観測計画作成手段7は、操作器5を介して、ユーザにより入力された観測環境情報を取得する(ステップST32)。すなわち、ユーザは、センサ3が基準目標1を観測する期間での気温、海温、湿度および気候等の観測環境情報を入力し、観測計画作成手段7はこの観測環境情報を取得する。
次いで、観測計画作成手段7は、基準位置入力手段6を介して、地上局2から基準位置情報を受信する(ステップST33)。なお、基準目標1が移動する場合には、基準位置入力手段6で基準位置情報に基づいて基準目標1の予測軌道を算出し、観測計画作成手段7はこの予測軌道情報を取得するようにしてもよい。
【0026】
次いで、観測計画作成手段7は、操作器5から取得した計画条件および基準位置入力手段6から取得した基準位置情報(または基準目標1の予測軌道情報)に基づいて、観測誤差測定計画を作成する(ステップST34)。具体的には、観測計画作成手段7は、計画条件における観測誤差測定対象・対象外のセンサ3および観測期間等と、基準目標1の位置(または予測軌道)とに基づいて、観測期間内に観測誤差測定対象のセンサ3が基準目標1を観測可能な期間を算出し、観測誤差測定計画を作成する。
【0027】
次いで、センサ制御手段8は、観測計画作成手段7から取得した観測誤差測定計画に基づいて、観測誤差測定対象のセンサ3が基準目標1を観測する際の、センサ3に対する観測空間の位置や制御タイミング等を含む制御計画を作成する(ステップST35)。このセンサ制御手段8により生成された制御計画は対応するセンサ3に送信される。
【0028】
次に、センサ3の観測誤差・誤差補正値を算出する際の中央装置4による動作を図4のフローチャートを参照しながら説明する。
中央装置4による観測誤差・誤差補正値算出動作では、図4に示すように、まず、基準位置入力手段6は、地上局2から基準位置情報を受信する(ステップST41)。
【0029】
一方、観測位置入力手段9は、センサ3から基準目標1の観測位置情報を受信する(ステップST42)。すなわち、観測位置入力手段9は、センサ3が観測誤差測定計画に基づく制御計画に従って基準目標1を観測している間、このセンサ3により観測された基準目標1の位置を示す情報を受信する。
【0030】
次いで、観測誤差算出手段10は、観測誤差測定を行う際に使用する観測位置情報を選別する(ステップST43)。具体的には、センサ3により観測された基準目標1の位置が、基準目標1により検出された自己の位置(または基準位置入力手段6により算出された基準目標1の予測軌道に基づく位置)から予め設定した距離閾値以上離れている場合には、このセンサ3による観測位置情報は観測誤差測定には用いない。
【0031】
次いで、観測誤差算出手段10は、選別した観測位置情報および基準位置入力手段6から取得した基準位置情報に基づいて、センサ3の観測誤差を算出する(ステップST44)。
次いで、観測誤差算出手段10は、算出した観測誤差に基づいて、実際にセンサ3が観測目標を観測した際に使用する誤差補正値を算出する(ステップST45)。
【0032】
次いで、情報管理手段11は、情報蓄積器12の蓄積情報を更新する(ステップST46)。すなわち、情報管理手段11は、観測計画作成手段7から取得した観測誤差測定計画および観測条件(基準位置情報に基づく基準目標1の飛翔距離情報、および、センサ3が基準目標1を観測した際の観測環境情報)、観測誤差算出手段10から取得した観測誤差および誤差補正値、この誤差補正値を算出する際に用いた基準位置情報(または予測軌道情報)および基準目標1の観測位置情報を関連付けて情報蓄積器12に蓄積させる。
これにより、各観測空間の位置・観測条件ごとのセンサ3の観測誤差および誤差補正値、この誤差補正値を算出する際に用いた基準目標1の基準位置情報(または予測軌道情報)および観測位置情報等の情報を蓄積させることができる。
次いで、情報出力手段13は、情報管理手段11により更新された情報を表示器14に表示させる(ステップST47)。
【0033】
なお、情報解析評価手段15で、操作器5から取得した情報解析評価条件に基づいて、情報蓄積器12から該当する情報を抽出して解析・評価を行い、この解析・評価結果を表示器14に表示させるようにしてもよい。
例えば、ユーザが解析項目として海水温と観測誤差を選択し、解析手段として2軸グラフを選択した場合には、情報蓄積器12に蓄積されている過去の観測誤差に基づいて、海水温と観測誤差を軸とするグラフを表示する。また、解析対象項目として、任意のセンサ3と観測誤差を選択し、解析手段として正規分布を選択した場合には、当該センサ3の観測誤差を正規分布として表示する。なお、表示するデータに対して、ユーザが設定する条件を基にフィルタリングすることも可能である。
【0034】
次に、センサ3が実際に観測目標を観測した際に、情報蓄積器12に蓄積されている誤差補正値を用いて、この観測された観測目標の位置を補正する際の中央装置4による動作を図5のフローチャートを参照しながら説明する。
なお、観測計画作成手段7は、操作器5を介して、ユーザにより入力された観測計画を予め取得する。すなわち、ユーザは、実際に観測目標を観測する際に対象とするセンサ3や、観測対象のセンサ3が観測目標を観測する期間等の情報である観測計画を入力し、観測計画作成手段7はこの観測計画を取得する。そして、センサ制御手段8は、観測計画作成手段7から取得した観測計画に基づいて、観測対象のセンサ3が観測目標を観測する際の、センサ3に対する観測空間の位置や制御タイミング等を含む制御計画を作成する。
なお、ユーザは、観測目標の飛翔経路を予測可能な場合には、この情報も操作器5を介して入力し、観測計画作成手段7はこの予測された観測目標の飛翔経路情報も取得する。
【0035】
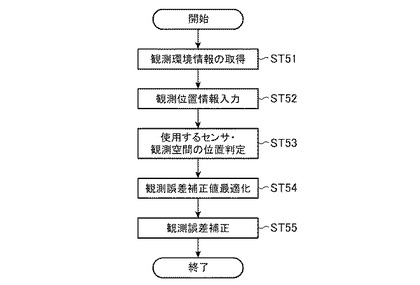
中央装置4による誤差補正動作では、図5に示すように、まず、観測計画作成手段7は、操作器5を介して、ユーザにより入力された観測環境情報を取得する(ステップST51)。すなわち、ユーザは、センサ3が観測目標を観測した際の気温、海温、湿度および気候等の観測環境情報を入力し、観測計画作成手段7はこの観測環境情報を取得する。また、観測計画作成手段7は、取得した観測環境情報、観測計画や飛翔経路情報を、相関評価値を算出する際に利用できるように、データ化(数値化)しておく。
【0036】
次いで、観測位置入力手段9は、センサ3により観測された観測目標の位置を示す情報を受信する(ステップST52)。すなわち、観測位置入力手段9は、センサ3が観測計画に基づく制御計画に従って観測目標を探知または追尾した場合、このセンサ3により観測された観測目標の位置を示す情報を受信する。
【0037】
次いで、観測誤差補正値最適化手段16は、観測位置入力手段9から取得した観測目標の観測位置情報に基づいて、観測に使用するセンサ3を選択し、このセンサ3に対する観測空間の位置を算出する(ステップST53)。すなわち、観測誤差補正値最適化手段16は、まず、観測位置入力手段9から取得した観測目標の観測位置情報に基づいて、観測目標の予測軌道を算出する。そして、この観測目標の予測軌道、各センサ3の覆域から算出した可視区間およびセンサ制御手段8による各センサ3に対する制御計画に基づいて、観測に使用するセンサ3を選択し、選択したセンサ3に対する観測空間の位置を算出する。なお、予測された観測目標の飛翔経路情報を取得可能であれば、上記の観測目標の予測軌道の替わりに、この飛翔経路情報を用いてもよい。
【0038】
次いで、観測誤差補正値最適化手段16は、選択したセンサ3に対する観測空間の位置、および、観測条件(観測位置情報に基づく観測目標の飛翔経路情報または観測計画作成手段7から取得した予測された観測目標の飛翔経路情報、および、観測計画作成手段7から取得した、センサ3が観測目標を観測した際の観測環境情報)に基づいて、この観測空間の位置・観測条件に対応した最適な誤差補正値を情報管理手段11を介して情報蓄積器12から抽出する(ステップST54)。具体的には、センサ3が観測目標を観測した際の観測空間の位置・観測条件と、情報蓄積器12に蓄積されている誤差補正値に関連付けられた観測空間の位置・観測条件との相関評価値を算出し、この相関評価値がもっとも高くなる誤差補正値を抽出する。
【0039】
これにより、観測に使用する各センサ3に対する観測空間の位置や観測条件に最適な誤差補正値を抽出することができる。なお、操作器5を介してユーザに観測条件の各項目(観測環境情報や飛翔経路情報等)に対する評価優先度や評価重み係数等を設定させて、相関評価値に反映させるようにしてもよい。また、観測空間の位置によって、あるいは同時に追尾するセンサ3によって誤差補正値が異なることも想定されるため、ユーザにより設定された区間ごとに誤差補正値を算出するようにしてもよい。
【0040】
次いで、観測誤差補正手段17は、観測誤差補正値最適化手段16から取得した誤差補正値を用いて、観測位置入力手段9から取得した、センサ3により観測された観測目標の位置を補正する(ステップST55)。この観測誤差補正手段17により補正された観測目標の位置を示す情報は、観測位置出力手段18および情報出力手段13を介して、表示器14に表示される。なお、観測誤差補正手段17は、観測誤差補正値最適化手段16から取得した誤差補正値ではなく、観測誤差算出手段10から取得した誤差補正値を用いて、観測目標の位置を補正するようにしてもよい。
【0041】
以上のように、この実施の形態1によれば、観測空間の位置・観測条件ごとに各センサ3の観測誤差・誤差補正値を予め算出・蓄積し、実観測における観測空間の位置・観測条件に応じて最適な誤差補正値を抽出し、誤差補正を行うように構成したので、遠方の目標を対象とするセンサのように、大気屈折等の影響により観測空間の位置・観測条件によって補正すべき観測誤差が異なる場合においても、最適な誤差補正値を用いて高精度に誤差補正を行うことができる。
【0042】
実施の形態2.
実施の形態1では、自己位置検出可能な基準目標1からの基準位置情報とセンサ3からの基準目標1の観測位置情報とに基づいて、センサ3の観測誤差を算出したが、既に同一の観測条件で観測誤差を測定したセンサ3が存在する場合には、基準目標1を用いることなく、この観測誤差測定済みのセンサ3と観測誤差測定対象のセンサ3とに、同一観測目標を同時に探知追尾させることで、観測誤差の測定を行うようにしてもよい。なお、基準位置情報の代替として使用する観測誤差測定済みのセンサ3からの観測位置情報は、誤差補正を施した位置情報とする。
【0043】
この場合、センサ制御手段8は、観測誤差測定済みのセンサ3と観測誤差測定対象のセンサ3に同一観測目標を観測させるように制御計画を作成する。
次いで、観測誤差補正値最適化手段16は、観測位置入力手段9から取得した、観測誤差測定済みのセンサ3からの観測目標の観測位置情報に基づく観測空間の位置、および、観測条件(観測位置情報に基づく観測目標の飛翔経路情報または観測計画作成手段7から取得した予測された観測目標の飛翔経路情報、および、観測計画作成手段7から取得した、観測誤差測定済みのセンサ3が観測目標を観測した際の観測環境情報)に基づいて、誤差補正値を抽出する。
次いで、観測誤差補正手段17は、この誤差補正値を用いて、観測誤差測定済みのセンサ3により観測された観測目標の位置を補正する。
【0044】
次いで、観測誤差算出手段10は、観測誤差補正手段17により補正された観測目標の位置を示す観測位置情報および観測位置入力手段9から取得した観測誤差測定対象のセンサ3からの観測目標の観測位置情報に基づいて、観測誤差測定対象のセンサ3の観測誤差を算出し、誤差補正値を算出する。
【0045】
以上のように、この実施の形態2によれば、基準目標1の代わりに観測誤差測定済みのセンサ3を用いて、観測誤差測定対象のセンサ3の観測誤差を測定するように構成したので、観測誤差測定対象のセンサ3が観測可能な空間に基準目標1が存在しない場合であっても観測誤差の測定を行うことができる。
【0046】
実施の形態3.
実施の形態1では、オンラインで入力される基準位置情報および観測位置情報を基に観測誤差の測定を行うものについて示したが、情報蓄積器12に蓄積されている基準位置情報および観測位置情報を用いて、オフラインで観測誤差の測定を行うようにしてもよい。
例えば、観測誤差測定に用いる観測位置情報を選別する際の距離閾値を変更した場合、観測誤差算出手段10は、情報蓄積器12に関連付けられて蓄積されている基準位置情報および、基準位置から、変更した距離閾値内の位置に該当する観測位置情報を基に、観測誤差および誤差補正値を再度算出する。
このように、情報蓄積器12に蓄積されている情報を用いることで、条件変更があった場合に容易に観測誤差および誤差補正値を再算出することができる。
【0047】
なお、本願発明はその発明の範囲内において、各実施の形態の自由な組み合わせ、あるいは各実施の形態の任意の構成要素の変形、もしくは各実施の形態において任意の構成要素の省略が可能である。
【符号の説明】
【0048】
1 基準目標、2 地上局、3 センサ、4 中央装置、5 操作器、6 基準位置入力手段、7 観測計画作成手段(観測環境取得手段)、8 センサ制御手段、9 観測位置入力手段、10 観測誤差算出手段、11 情報管理手段、12 情報蓄積器、13 情報出力手段、14 表示器、15 情報解析評価手段、16 観測誤差補正値最適化手段、17 観測誤差補正手段、18 観測位置出力手段。
【技術分野】
【0001】
この発明は、センサの観測誤差を予め測定して誤差補正値を算出・蓄積し、蓄積した誤差補正値を用いて、実際に観測された位置を補正するセンサ誤差較正システムに関するものである。
【背景技術】
【0002】
従来のセンサ誤差較正システムでは、観測目標の位置を観測するセンサに対して、センサの設置位置誤差、方位測角誤差および3軸バイアス誤差を測定または推定している(例えば特許文献1,2参照)。そして、センサにより観測された観測目標の位置に対して、測定・推定した一定の設置位置誤差、方位測角度誤差および3軸バイアス誤差を用いて補正を行い、ユーザに高精度な観測位置情報を提供している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平8−271619号公報
【特許文献2】特開2008−175683号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述したように特許文献1,2に開示される従来のセンサ誤差較正システムでは、誤差が常に一定であるとして補正を行っている。しかしながら、遠方の目標を観測するセンサでは、大気屈折等の影響で観測空間の位置(センサを中心とした観測目標の方位、仰角や距離等)によって補正すべき誤差の大きさが異なる。また、この大気屈折による影響は観測条件(センサが観測している期間での気温、海温、湿度や気候等の観測環境情報や観測目標の飛翔経路情報等)によっても異なる。そのため、このようなセンサに対して特許文献1,2に開示される従来のセンサ誤差較正システムを適用した場合、誤差補正精度が悪化してしまうという課題があった。
【0005】
この発明は、上記のような課題を解決するためになされたもので、観測空間の位置・観測条件によりセンサの観測誤差が異なる場合にも、高精度に誤差補正を行うことができるセンサ誤差較正システムを提供することを目的としている。
【課題を解決するための手段】
【0006】
この発明に係るセンサ誤差較正システムは、センサにより観測された観測目標の位置を示す観測位置情報を受信する観測位置入力手段と、センサの観測誤差を測定する際に当該センサが観測目標として観測する、基準目標の位置を示す基準位置情報を受信する基準位置入力手段と、センサが観測している期間での観測環境情報を取得する観測環境取得手段と、基準位置入力手段により受信された基準位置情報に基づいて、センサに対する観測空間の位置を算出し、当該センサの動作を制御するセンサ制御手段と、観測位置入力手段により受信された、センサ制御手段による制御に従い動作したセンサからの基準目標の観測位置情報、および、基準位置入力手段により受信された基準位置情報に基づいて、当該センサの観測誤差を算出し、誤差補正値を算出する観測誤差算出手段と、基準位置入力手段により受信された基準位置情報に基づく飛翔経路情報および観測環境取得手段により取得されたセンサが基準目標を観測した際の観測環境情報を含む観測条件、センサ制御手段により算出された当該センサに対する観測空間の位置、および、観測誤差算出手段により算出された誤差補正値を関連付けて蓄積する情報蓄積器と、観測位置入力手段により受信された観測目標の観測位置情報に基づく飛翔経路情報または予測された飛翔経路情報、および観測環境取得手段により取得されたセンサが観測目標を観測した際の観測環境情報を含む観測条件、および、当該観測位置情報に基づく当該センサに対する観測空間の位置に基づいて、情報蓄積器から誤差補正値を抽出する観測誤差補正値最適化手段と、観測誤差補正値最適化手段により抽出された誤差補正値を用いて、当該センサにより観測された観測目標の位置を補正する観測誤差補正手段とを備えたものである。
【発明の効果】
【0007】
この発明によれば、上記のように構成したので、観測空間の位置・観測条件によりセンサの観測誤差が異なる場合にも、高精度に誤差補正を行うことができる。
【図面の簡単な説明】
【0008】
【図1】この発明の実施の形態1に係るセンサ誤差較正システムが適用されたセンサネットワークシステムの構成を示す図である。
【図2】この発明の実施の形態1に係る中央装置の構成を示す図である。
【図3】この発明の実施の形態1に係る中央装置による観測誤差測定計画作成動作を示すフローチャートである。
【図4】この発明の実施の形態1に係る中央装置による観測誤差測定・誤差補正値算出動作を示すフローチャートである。
【図5】この発明の実施の形態1に係る中央装置による誤差補正動作を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、この発明の実施の形態について図面を参照しながら詳細に説明する。
実施の形態1.
図1はこの発明の実施の形態1に係るセンサ誤差較正システムが適用されたセンサネットワークシステムの構成を示す図である。
センサネットワークシステムは、図1に示すように、基準目標1、地上局2、センサ(♯1〜♯N)3および中央装置4から構成されている。
【0010】
基準目標1は、所定の観測空間の位置・観測条件において、センサ3の観測誤差を測定する際に、センサ3が観測目標として観測する対象となるものであり、例えば人工衛星等が挙げられる。なお、観測空間の位置とは、センサ3を中心とした観測目標の方位、仰角や距離等である。また、観測条件とは、センサ3が観測している期間での気温、海温、湿度や気候等の観測環境情報や観測目標の飛翔経路情報等である。また、基準目標1は、自己の位置を高精度に検出することが可能なGPS等の自己位置検出手段を有している。この基準目標1により検出された自己の位置を示す情報(基準位置情報)は地上局2に送信される。
地上局2は、基準目標1から基準位置情報を受信し、中央装置4に送信するものである。
【0011】
センサ3は、中央装置4の後述するセンサ制御手段8により生成された制御計画に従い、観測目標の位置を観測するものであり、単体または複数設けられている(図1,2ではN個のセンサ♯1〜♯Nを示している)。なお、センサ3は、観測誤差測定の場合には、観測目標として基準目標1を観測する。このセンサ3により観測された観測目標の位置を示す情報(観測位置情報)は中央装置4の後述する観測位置入力手段9に送信される。
【0012】
中央装置4は、地上局2から受信した基準位置情報およびセンサ3から受信した基準目標1の観測位置情報に基づいて、観測空間の位置・観測条件ごとのセンサ3の観測誤差測定および誤差補正値の算出・蓄積を行うものである。また、中央装置4は、センサ3が実際に観測目標を観測した際には、このセンサ3に対する観測空間の位置・観測条件に応じた誤差補正値を抽出し、センサ3により観測された観測目標の位置を補正する。
【0013】
次に、中央装置4の構成について説明する。
図2はこの発明の実施形態1による中央装置4を示す機能構成図である。
中央装置4は、図2に示すように、操作器5、基準位置入力手段6、観測計画作成手段(観測環境取得手段)7、センサ制御手段8、観測位置入力手段9、観測誤差算出手段10、情報管理手段11、情報蓄積器12、情報出力手段13、表示器14、情報解析評価手段15、観測誤差補正値最適化手段16、観測誤差補正手段17および観測位置出力手段18から構成されている。なおセンサ誤差較正システムは、中央装置4の操作器5および表示器14を除いた各機能部から構成されている。
【0014】
操作器5は、観測環境情報、計画条件、情報解析評価条件、観測計画や観測目標の飛翔経路情報等のユーザ入力を受け付けるものである。ここで、計画条件とは、センサ3の観測誤差を測定する際に対象・対象外とするセンサ3や、観測誤差測定対象のセンサ3が基準目標1を観測する期間等である。また、情報解析評価条件とは、情報解析評価手段15において観測誤差の解析・評価を行う際に用いる解析対象や解析手段等である。また、観測計画とは、実際に観測目標を観測する際に対象とするセンサ3や、観測対象のセンサ3が観測目標を観測する期間等である。
【0015】
基準位置入力手段6は、地上局2から基準位置情報を受信するものである。なお、基準目標1が移動する場合には、基準位置入力手段6は、取得した基準位置情報から基準目標1の予測軌道を算出するようにしてもよい。
【0016】
観測計画作成手段7は、操作器5から取得した、センサ3が基準目標1を観測する際の計画条件、および、基準位置入力手段6から取得した基準位置情報(または基準目標1の予測軌道情報)に基づいて、観測誤差測定計画を作成するものである。この観測誤差測定計画には、観測誤差測定対象のセンサ3が基準目標1を観測可能な期間を示す情報が含まれている。また、観測計画作成手段7は、操作器5から、センサ3が観測目標を観測している期間での観測環境情報および観測計画も取得する。さらに、操作器5を介してユーザにより予測された観測目標の飛翔経路情報が入力された場合には、この情報も取得する。そして、観測計画作成手段7は、取得した観測環境情報、観測計画や飛翔経路情報を、相関評価値を算出する際に利用できるように、データ化(数値化)する。
【0017】
センサ制御手段8は、観測計画作成手段7から取得した観測誤差測定計画または観測計画に基づいて、制御計画を作成し、各センサ3を制御するものである。この制御計画には、センサ3が基準目標1を観測する際のセンサ3に対する観測空間の位置や制御タイミング等が含まれている。
【0018】
観測位置入力手段9は、センサ3から観測目標の観測位置情報を受信するものである。なお、センサ3の観測誤差を測定する際には、観測位置入力手段9は、センサ3から基準目標1の観測位置情報を受信する。
【0019】
観測誤差算出手段10は、基準位置入力手段6から取得した基準位置情報および観測位置入力手段9から取得した基準目標1の観測位置情報に基づいて、センサ3の観測誤差を算出するものである。また、観測誤差算出手段10は、算出した観測誤差に基づいて、実際にセンサ3が観測目標を観測した際に使用する誤差補正値を算出する。
【0020】
情報管理手段11は、情報蓄積器12に蓄積される情報を管理するものである。この情報管理手段11は、観測計画作成手段7から取得した観測誤差測定計画および観測条件(基準位置情報に基づく基準目標1の飛翔距離情報、および、センサ3が基準目標1を観測した際の観測環境情報)、観測誤差算出手段10から取得した観測誤差および誤差補正値、この誤差補正値を算出する際に用いた基準位置情報(または予測軌道情報)および基準目標1の観測位置情報を関連付けて情報蓄積器12に蓄積させる。また、情報管理手段11は、情報解析評価手段15から取得した観測誤差の解析・評価を示す情報も情報蓄積器12に蓄積させる。
情報蓄積器12は、情報管理手段11を介して取得した各種情報を蓄積するものである。
【0021】
情報出力手段13は、情報管理手段11を介して情報蓄積器12から取得した情報、情報解析評価手段15から取得した観測誤差の解析・評価を示す情報や、観測位置出力手段18から取得した、誤差補正された観測目標の観測位置情報を表示器14に出力するものである。
表示器14は、情報出力手段13から取得した情報を表示するものである。
情報解析評価手段15は、操作器5から取得した情報解析評価条件に基づいて、情報蓄積器12から該当する情報を抽出し、観測誤差の解析・評価を行うものである。
【0022】
観測誤差補正値最適化手段16は、観測位置入力手段9から取得した観測目標の観測位置情報に基づくセンサ3に対する観測空間の位置、および、観測条件(観測位置情報に基づく観測目標の飛翔経路情報または観測計画作成手段7から取得した予測された観測目標の飛翔経路情報、および、観測計画作成手段7から取得した、センサ3がこの観測目標を観測した際の観測環境情報)に基づいて、この観測空間の位置・観測条件に対応した最適な誤差補正値を情報管理手段11を介して情報蓄積器12から抽出するものである。
【0023】
観測誤差補正手段17は、観測誤差補正値最適化手段16から取得した誤差補正値を用いて、観測位置入力手段9から取得した、センサ3により観測された観測目標の位置を補正するものである。
観測位置出力手段18は、観測誤差補正手段17から取得した観測位置情報を情報出力手段13に出力するものである。
【0024】
次に、上記のように構成された中央装置4の動作について説明する。
まず、観測誤差測定計画を作成する際の中央装置4による動作を図3のフローチャートを参照しながら説明する。
中央装置4による観測誤差測定計画作成動作では、図3に示すように、まず、観測計画作成手段7は、操作器5を介して、ユーザにより入力された計画条件を取得する(ステップST31)。すなわち、ユーザは、センサ3の観測誤差を測定する際に対象・対象外とするセンサ3および観測誤差測定対象のセンサ3が基準目標1を観測する期間等の情報を計画条件として入力し、観測計画作成手段7はこの計画条件を取得する。これにより、例えば「○月○日○時から△月△日△時の間にセンサ♯□もしくはセンサ♯■を使用して観測誤差を測定したい」等という計画条件を取得することができる。
【0025】
次いで、観測計画作成手段7は、操作器5を介して、ユーザにより入力された観測環境情報を取得する(ステップST32)。すなわち、ユーザは、センサ3が基準目標1を観測する期間での気温、海温、湿度および気候等の観測環境情報を入力し、観測計画作成手段7はこの観測環境情報を取得する。
次いで、観測計画作成手段7は、基準位置入力手段6を介して、地上局2から基準位置情報を受信する(ステップST33)。なお、基準目標1が移動する場合には、基準位置入力手段6で基準位置情報に基づいて基準目標1の予測軌道を算出し、観測計画作成手段7はこの予測軌道情報を取得するようにしてもよい。
【0026】
次いで、観測計画作成手段7は、操作器5から取得した計画条件および基準位置入力手段6から取得した基準位置情報(または基準目標1の予測軌道情報)に基づいて、観測誤差測定計画を作成する(ステップST34)。具体的には、観測計画作成手段7は、計画条件における観測誤差測定対象・対象外のセンサ3および観測期間等と、基準目標1の位置(または予測軌道)とに基づいて、観測期間内に観測誤差測定対象のセンサ3が基準目標1を観測可能な期間を算出し、観測誤差測定計画を作成する。
【0027】
次いで、センサ制御手段8は、観測計画作成手段7から取得した観測誤差測定計画に基づいて、観測誤差測定対象のセンサ3が基準目標1を観測する際の、センサ3に対する観測空間の位置や制御タイミング等を含む制御計画を作成する(ステップST35)。このセンサ制御手段8により生成された制御計画は対応するセンサ3に送信される。
【0028】
次に、センサ3の観測誤差・誤差補正値を算出する際の中央装置4による動作を図4のフローチャートを参照しながら説明する。
中央装置4による観測誤差・誤差補正値算出動作では、図4に示すように、まず、基準位置入力手段6は、地上局2から基準位置情報を受信する(ステップST41)。
【0029】
一方、観測位置入力手段9は、センサ3から基準目標1の観測位置情報を受信する(ステップST42)。すなわち、観測位置入力手段9は、センサ3が観測誤差測定計画に基づく制御計画に従って基準目標1を観測している間、このセンサ3により観測された基準目標1の位置を示す情報を受信する。
【0030】
次いで、観測誤差算出手段10は、観測誤差測定を行う際に使用する観測位置情報を選別する(ステップST43)。具体的には、センサ3により観測された基準目標1の位置が、基準目標1により検出された自己の位置(または基準位置入力手段6により算出された基準目標1の予測軌道に基づく位置)から予め設定した距離閾値以上離れている場合には、このセンサ3による観測位置情報は観測誤差測定には用いない。
【0031】
次いで、観測誤差算出手段10は、選別した観測位置情報および基準位置入力手段6から取得した基準位置情報に基づいて、センサ3の観測誤差を算出する(ステップST44)。
次いで、観測誤差算出手段10は、算出した観測誤差に基づいて、実際にセンサ3が観測目標を観測した際に使用する誤差補正値を算出する(ステップST45)。
【0032】
次いで、情報管理手段11は、情報蓄積器12の蓄積情報を更新する(ステップST46)。すなわち、情報管理手段11は、観測計画作成手段7から取得した観測誤差測定計画および観測条件(基準位置情報に基づく基準目標1の飛翔距離情報、および、センサ3が基準目標1を観測した際の観測環境情報)、観測誤差算出手段10から取得した観測誤差および誤差補正値、この誤差補正値を算出する際に用いた基準位置情報(または予測軌道情報)および基準目標1の観測位置情報を関連付けて情報蓄積器12に蓄積させる。
これにより、各観測空間の位置・観測条件ごとのセンサ3の観測誤差および誤差補正値、この誤差補正値を算出する際に用いた基準目標1の基準位置情報(または予測軌道情報)および観測位置情報等の情報を蓄積させることができる。
次いで、情報出力手段13は、情報管理手段11により更新された情報を表示器14に表示させる(ステップST47)。
【0033】
なお、情報解析評価手段15で、操作器5から取得した情報解析評価条件に基づいて、情報蓄積器12から該当する情報を抽出して解析・評価を行い、この解析・評価結果を表示器14に表示させるようにしてもよい。
例えば、ユーザが解析項目として海水温と観測誤差を選択し、解析手段として2軸グラフを選択した場合には、情報蓄積器12に蓄積されている過去の観測誤差に基づいて、海水温と観測誤差を軸とするグラフを表示する。また、解析対象項目として、任意のセンサ3と観測誤差を選択し、解析手段として正規分布を選択した場合には、当該センサ3の観測誤差を正規分布として表示する。なお、表示するデータに対して、ユーザが設定する条件を基にフィルタリングすることも可能である。
【0034】
次に、センサ3が実際に観測目標を観測した際に、情報蓄積器12に蓄積されている誤差補正値を用いて、この観測された観測目標の位置を補正する際の中央装置4による動作を図5のフローチャートを参照しながら説明する。
なお、観測計画作成手段7は、操作器5を介して、ユーザにより入力された観測計画を予め取得する。すなわち、ユーザは、実際に観測目標を観測する際に対象とするセンサ3や、観測対象のセンサ3が観測目標を観測する期間等の情報である観測計画を入力し、観測計画作成手段7はこの観測計画を取得する。そして、センサ制御手段8は、観測計画作成手段7から取得した観測計画に基づいて、観測対象のセンサ3が観測目標を観測する際の、センサ3に対する観測空間の位置や制御タイミング等を含む制御計画を作成する。
なお、ユーザは、観測目標の飛翔経路を予測可能な場合には、この情報も操作器5を介して入力し、観測計画作成手段7はこの予測された観測目標の飛翔経路情報も取得する。
【0035】
中央装置4による誤差補正動作では、図5に示すように、まず、観測計画作成手段7は、操作器5を介して、ユーザにより入力された観測環境情報を取得する(ステップST51)。すなわち、ユーザは、センサ3が観測目標を観測した際の気温、海温、湿度および気候等の観測環境情報を入力し、観測計画作成手段7はこの観測環境情報を取得する。また、観測計画作成手段7は、取得した観測環境情報、観測計画や飛翔経路情報を、相関評価値を算出する際に利用できるように、データ化(数値化)しておく。
【0036】
次いで、観測位置入力手段9は、センサ3により観測された観測目標の位置を示す情報を受信する(ステップST52)。すなわち、観測位置入力手段9は、センサ3が観測計画に基づく制御計画に従って観測目標を探知または追尾した場合、このセンサ3により観測された観測目標の位置を示す情報を受信する。
【0037】
次いで、観測誤差補正値最適化手段16は、観測位置入力手段9から取得した観測目標の観測位置情報に基づいて、観測に使用するセンサ3を選択し、このセンサ3に対する観測空間の位置を算出する(ステップST53)。すなわち、観測誤差補正値最適化手段16は、まず、観測位置入力手段9から取得した観測目標の観測位置情報に基づいて、観測目標の予測軌道を算出する。そして、この観測目標の予測軌道、各センサ3の覆域から算出した可視区間およびセンサ制御手段8による各センサ3に対する制御計画に基づいて、観測に使用するセンサ3を選択し、選択したセンサ3に対する観測空間の位置を算出する。なお、予測された観測目標の飛翔経路情報を取得可能であれば、上記の観測目標の予測軌道の替わりに、この飛翔経路情報を用いてもよい。
【0038】
次いで、観測誤差補正値最適化手段16は、選択したセンサ3に対する観測空間の位置、および、観測条件(観測位置情報に基づく観測目標の飛翔経路情報または観測計画作成手段7から取得した予測された観測目標の飛翔経路情報、および、観測計画作成手段7から取得した、センサ3が観測目標を観測した際の観測環境情報)に基づいて、この観測空間の位置・観測条件に対応した最適な誤差補正値を情報管理手段11を介して情報蓄積器12から抽出する(ステップST54)。具体的には、センサ3が観測目標を観測した際の観測空間の位置・観測条件と、情報蓄積器12に蓄積されている誤差補正値に関連付けられた観測空間の位置・観測条件との相関評価値を算出し、この相関評価値がもっとも高くなる誤差補正値を抽出する。
【0039】
これにより、観測に使用する各センサ3に対する観測空間の位置や観測条件に最適な誤差補正値を抽出することができる。なお、操作器5を介してユーザに観測条件の各項目(観測環境情報や飛翔経路情報等)に対する評価優先度や評価重み係数等を設定させて、相関評価値に反映させるようにしてもよい。また、観測空間の位置によって、あるいは同時に追尾するセンサ3によって誤差補正値が異なることも想定されるため、ユーザにより設定された区間ごとに誤差補正値を算出するようにしてもよい。
【0040】
次いで、観測誤差補正手段17は、観測誤差補正値最適化手段16から取得した誤差補正値を用いて、観測位置入力手段9から取得した、センサ3により観測された観測目標の位置を補正する(ステップST55)。この観測誤差補正手段17により補正された観測目標の位置を示す情報は、観測位置出力手段18および情報出力手段13を介して、表示器14に表示される。なお、観測誤差補正手段17は、観測誤差補正値最適化手段16から取得した誤差補正値ではなく、観測誤差算出手段10から取得した誤差補正値を用いて、観測目標の位置を補正するようにしてもよい。
【0041】
以上のように、この実施の形態1によれば、観測空間の位置・観測条件ごとに各センサ3の観測誤差・誤差補正値を予め算出・蓄積し、実観測における観測空間の位置・観測条件に応じて最適な誤差補正値を抽出し、誤差補正を行うように構成したので、遠方の目標を対象とするセンサのように、大気屈折等の影響により観測空間の位置・観測条件によって補正すべき観測誤差が異なる場合においても、最適な誤差補正値を用いて高精度に誤差補正を行うことができる。
【0042】
実施の形態2.
実施の形態1では、自己位置検出可能な基準目標1からの基準位置情報とセンサ3からの基準目標1の観測位置情報とに基づいて、センサ3の観測誤差を算出したが、既に同一の観測条件で観測誤差を測定したセンサ3が存在する場合には、基準目標1を用いることなく、この観測誤差測定済みのセンサ3と観測誤差測定対象のセンサ3とに、同一観測目標を同時に探知追尾させることで、観測誤差の測定を行うようにしてもよい。なお、基準位置情報の代替として使用する観測誤差測定済みのセンサ3からの観測位置情報は、誤差補正を施した位置情報とする。
【0043】
この場合、センサ制御手段8は、観測誤差測定済みのセンサ3と観測誤差測定対象のセンサ3に同一観測目標を観測させるように制御計画を作成する。
次いで、観測誤差補正値最適化手段16は、観測位置入力手段9から取得した、観測誤差測定済みのセンサ3からの観測目標の観測位置情報に基づく観測空間の位置、および、観測条件(観測位置情報に基づく観測目標の飛翔経路情報または観測計画作成手段7から取得した予測された観測目標の飛翔経路情報、および、観測計画作成手段7から取得した、観測誤差測定済みのセンサ3が観測目標を観測した際の観測環境情報)に基づいて、誤差補正値を抽出する。
次いで、観測誤差補正手段17は、この誤差補正値を用いて、観測誤差測定済みのセンサ3により観測された観測目標の位置を補正する。
【0044】
次いで、観測誤差算出手段10は、観測誤差補正手段17により補正された観測目標の位置を示す観測位置情報および観測位置入力手段9から取得した観測誤差測定対象のセンサ3からの観測目標の観測位置情報に基づいて、観測誤差測定対象のセンサ3の観測誤差を算出し、誤差補正値を算出する。
【0045】
以上のように、この実施の形態2によれば、基準目標1の代わりに観測誤差測定済みのセンサ3を用いて、観測誤差測定対象のセンサ3の観測誤差を測定するように構成したので、観測誤差測定対象のセンサ3が観測可能な空間に基準目標1が存在しない場合であっても観測誤差の測定を行うことができる。
【0046】
実施の形態3.
実施の形態1では、オンラインで入力される基準位置情報および観測位置情報を基に観測誤差の測定を行うものについて示したが、情報蓄積器12に蓄積されている基準位置情報および観測位置情報を用いて、オフラインで観測誤差の測定を行うようにしてもよい。
例えば、観測誤差測定に用いる観測位置情報を選別する際の距離閾値を変更した場合、観測誤差算出手段10は、情報蓄積器12に関連付けられて蓄積されている基準位置情報および、基準位置から、変更した距離閾値内の位置に該当する観測位置情報を基に、観測誤差および誤差補正値を再度算出する。
このように、情報蓄積器12に蓄積されている情報を用いることで、条件変更があった場合に容易に観測誤差および誤差補正値を再算出することができる。
【0047】
なお、本願発明はその発明の範囲内において、各実施の形態の自由な組み合わせ、あるいは各実施の形態の任意の構成要素の変形、もしくは各実施の形態において任意の構成要素の省略が可能である。
【符号の説明】
【0048】
1 基準目標、2 地上局、3 センサ、4 中央装置、5 操作器、6 基準位置入力手段、7 観測計画作成手段(観測環境取得手段)、8 センサ制御手段、9 観測位置入力手段、10 観測誤差算出手段、11 情報管理手段、12 情報蓄積器、13 情報出力手段、14 表示器、15 情報解析評価手段、16 観測誤差補正値最適化手段、17 観測誤差補正手段、18 観測位置出力手段。
【特許請求の範囲】
【請求項1】
センサにより観測された観測目標の位置を示す観測位置情報を受信する観測位置入力手段と、
前記センサの観測誤差を測定する際に当該センサが観測目標として観測する、基準目標の位置を示す基準位置情報を受信する基準位置入力手段と、
前記センサが観測している期間での観測環境情報を取得する観測環境取得手段と、
前記基準位置入力手段により受信された基準位置情報に基づいて、センサに対する観測空間の位置を算出し、当該センサの動作を制御するセンサ制御手段と、
前記観測位置入力手段により受信された、前記センサ制御手段による制御に従い動作した前記センサからの基準目標の観測位置情報、および、前記基準位置入力手段により受信された基準位置情報に基づいて、当該センサの観測誤差を算出し、誤差補正値を算出する観測誤差算出手段と、
前記基準位置入力手段により受信された基準位置情報に基づく飛翔経路情報および前記観測環境取得手段により取得された前記センサが基準目標を観測した際の観測環境情報を含む観測条件、前記センサ制御手段により算出された当該センサに対する観測空間の位置、および、前記観測誤差算出手段により算出された誤差補正値を関連付けて蓄積する情報蓄積器と、
前記観測位置入力手段により受信された観測目標の観測位置情報に基づく飛翔経路情報または予測された飛翔経路情報、および前記観測環境取得手段により取得された前記センサが観測目標を観測した際の観測環境情報を含む観測条件、および、当該観測位置情報に基づく当該センサに対する観測空間の位置に基づいて、前記情報蓄積器から誤差補正値を抽出する観測誤差補正値最適化手段と、
前記観測誤差補正値最適化手段により抽出された誤差補正値を用いて、当該センサにより観測された観測目標の位置を補正する観測誤差補正手段と
を備えたセンサ誤差較正システム。
【請求項2】
前記観測誤差算出手段は、前記観測位置情報が示す基準目標の位置が、前記基準位置情報が示す基準目標の位置から予め設定した距離閾値以上離れている場合に、当該観測位置情報を観測誤差測定に用いない
ことを特徴とする請求項1記載のセンサ誤差較正システム。
【請求項3】
前記観測誤差補正値最適化手段は、前記センサが観測目標を観測した際の観測条件および観測空間の位置と、前記情報蓄積器に蓄積されている誤差補正値に関連付けられた観測条件および観測空間の位置との相関評価値を算出し、当該相関評価値が最も高い誤差補正値を抽出する
ことを特徴とする請求項1または請求項2記載のセンサ誤差較正システム。
【請求項4】
前記情報蓄積器は、前記観測誤差算出手段により算出された観測誤差を、対応する観測条件、観測空間の位置および誤差補正値と関連付けて蓄積し、
前記観測誤差の解析・評価を行う際に用いる解析対象および解析手段を含む情報解析評価条件を取得し、当該情報解析評価条件に基づいて、前記情報蓄積器から該当する情報を抽出し、前記観測誤差の解析・評価を行う情報解析評価手段を備えた
ことを特徴とする請求項1から請求項3のうちのいずれか1項記載のセンサ誤差較正システム。
【請求項5】
前記センサ制御手段は、前記センサの観測誤差を測定する場合に同一の観測条件で観測誤差が測定されたセンサが既に存在する場合に、当該観測誤差測定済みのセンサと観測誤差測定対象のセンサに同一観測目標を観測させるように制御を行い、
前記観測誤差補正値最適化手段は、前記観測位置入力手段により受信された前記観測誤差測定済みのセンサからの観測目標の観測位置情報に基づく飛翔経路情報または予測された飛翔経路情報、および前記観測環境取得手段により取得された当該観測誤差測定済みのセンサが観測目標を観測した際の観測環境情報を含む観測条件、および、当該観測位置情報に基づく前記観測誤差測定済みのセンサに対する観測空間の位置に基づいて、前記情報蓄積器から誤差補正値を抽出し、
前記観測誤差補正手段は、前記観測誤差補正値最適化手段により抽出された誤差補正値を用いて、前記観測誤差測定済みのセンサにより観測された観測目標の位置を補正し、
前記観測誤差算出手段は、前記観測誤差補正手段により補正された観測目標の位置を示す観測位置情報、および、前記観測位置入力手段により受信された前記観測誤差測定対象のセンサからの観測目標の観測位置情報に基づいて、前記観測誤差測定対象のセンサの観測誤差を算出し、誤差補正値を算出する
ことを特徴とする請求項1から請求項4のうちのいずれか1項記載のセンサ誤差較正システム。
【請求項6】
前記情報蓄積器は、前記基準位置入力手段により受信された基準位置情報および前記観測位置入力手段により受信された基準目標の観測位置情報を関連付けて蓄積し、
前記観測誤差算出手段は、前記情報蓄積器に関連付けられて蓄積されている基準位置情報および所定の観測位置情報に基づいて、観測誤差および誤差補正値を算出する
ことを特徴とする請求項1から請求項5のうちのいずれか1項記載のセンサ誤差較正システム。
【請求項1】
センサにより観測された観測目標の位置を示す観測位置情報を受信する観測位置入力手段と、
前記センサの観測誤差を測定する際に当該センサが観測目標として観測する、基準目標の位置を示す基準位置情報を受信する基準位置入力手段と、
前記センサが観測している期間での観測環境情報を取得する観測環境取得手段と、
前記基準位置入力手段により受信された基準位置情報に基づいて、センサに対する観測空間の位置を算出し、当該センサの動作を制御するセンサ制御手段と、
前記観測位置入力手段により受信された、前記センサ制御手段による制御に従い動作した前記センサからの基準目標の観測位置情報、および、前記基準位置入力手段により受信された基準位置情報に基づいて、当該センサの観測誤差を算出し、誤差補正値を算出する観測誤差算出手段と、
前記基準位置入力手段により受信された基準位置情報に基づく飛翔経路情報および前記観測環境取得手段により取得された前記センサが基準目標を観測した際の観測環境情報を含む観測条件、前記センサ制御手段により算出された当該センサに対する観測空間の位置、および、前記観測誤差算出手段により算出された誤差補正値を関連付けて蓄積する情報蓄積器と、
前記観測位置入力手段により受信された観測目標の観測位置情報に基づく飛翔経路情報または予測された飛翔経路情報、および前記観測環境取得手段により取得された前記センサが観測目標を観測した際の観測環境情報を含む観測条件、および、当該観測位置情報に基づく当該センサに対する観測空間の位置に基づいて、前記情報蓄積器から誤差補正値を抽出する観測誤差補正値最適化手段と、
前記観測誤差補正値最適化手段により抽出された誤差補正値を用いて、当該センサにより観測された観測目標の位置を補正する観測誤差補正手段と
を備えたセンサ誤差較正システム。
【請求項2】
前記観測誤差算出手段は、前記観測位置情報が示す基準目標の位置が、前記基準位置情報が示す基準目標の位置から予め設定した距離閾値以上離れている場合に、当該観測位置情報を観測誤差測定に用いない
ことを特徴とする請求項1記載のセンサ誤差較正システム。
【請求項3】
前記観測誤差補正値最適化手段は、前記センサが観測目標を観測した際の観測条件および観測空間の位置と、前記情報蓄積器に蓄積されている誤差補正値に関連付けられた観測条件および観測空間の位置との相関評価値を算出し、当該相関評価値が最も高い誤差補正値を抽出する
ことを特徴とする請求項1または請求項2記載のセンサ誤差較正システム。
【請求項4】
前記情報蓄積器は、前記観測誤差算出手段により算出された観測誤差を、対応する観測条件、観測空間の位置および誤差補正値と関連付けて蓄積し、
前記観測誤差の解析・評価を行う際に用いる解析対象および解析手段を含む情報解析評価条件を取得し、当該情報解析評価条件に基づいて、前記情報蓄積器から該当する情報を抽出し、前記観測誤差の解析・評価を行う情報解析評価手段を備えた
ことを特徴とする請求項1から請求項3のうちのいずれか1項記載のセンサ誤差較正システム。
【請求項5】
前記センサ制御手段は、前記センサの観測誤差を測定する場合に同一の観測条件で観測誤差が測定されたセンサが既に存在する場合に、当該観測誤差測定済みのセンサと観測誤差測定対象のセンサに同一観測目標を観測させるように制御を行い、
前記観測誤差補正値最適化手段は、前記観測位置入力手段により受信された前記観測誤差測定済みのセンサからの観測目標の観測位置情報に基づく飛翔経路情報または予測された飛翔経路情報、および前記観測環境取得手段により取得された当該観測誤差測定済みのセンサが観測目標を観測した際の観測環境情報を含む観測条件、および、当該観測位置情報に基づく前記観測誤差測定済みのセンサに対する観測空間の位置に基づいて、前記情報蓄積器から誤差補正値を抽出し、
前記観測誤差補正手段は、前記観測誤差補正値最適化手段により抽出された誤差補正値を用いて、前記観測誤差測定済みのセンサにより観測された観測目標の位置を補正し、
前記観測誤差算出手段は、前記観測誤差補正手段により補正された観測目標の位置を示す観測位置情報、および、前記観測位置入力手段により受信された前記観測誤差測定対象のセンサからの観測目標の観測位置情報に基づいて、前記観測誤差測定対象のセンサの観測誤差を算出し、誤差補正値を算出する
ことを特徴とする請求項1から請求項4のうちのいずれか1項記載のセンサ誤差較正システム。
【請求項6】
前記情報蓄積器は、前記基準位置入力手段により受信された基準位置情報および前記観測位置入力手段により受信された基準目標の観測位置情報を関連付けて蓄積し、
前記観測誤差算出手段は、前記情報蓄積器に関連付けられて蓄積されている基準位置情報および所定の観測位置情報に基づいて、観測誤差および誤差補正値を算出する
ことを特徴とする請求項1から請求項5のうちのいずれか1項記載のセンサ誤差較正システム。
【図1】


【図2】
【図3】
【図4】

【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−194105(P2012−194105A)
【公開日】平成24年10月11日(2012.10.11)
【国際特許分類】
【出願番号】特願2011−59257(P2011−59257)
【出願日】平成23年3月17日(2011.3.17)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成24年10月11日(2012.10.11)
【国際特許分類】
【出願日】平成23年3月17日(2011.3.17)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]