
センター側システム及び情報端末

【課題】本発明は、プローブ車両からオートクルーズに関する情報を直接取得することができないプローブ情報端末を備えるプローブ情報システムの信頼性を高めることが可能な技術を提供することを目的とする。
【解決手段】本発明に係るセンター側システム301は、受信部326で受信したプローブ車両位置情報と、地図DB314に格納されている地図情報とに基づいて、プローブ車両151がオートクルーズで走行中か否かを判断するオートクルーズ走行判断部315と、オートクルーズ走行判断部315で判断された結果と、地図DB314に格納されている地図情報とに基づいて、車両の走行可能速度を含む交通状況を推定する交通状況推定部318と、交通状況推定部318で推定された交通状況を外部に送信する送信部327、または交通状況を外部からのアクセスによって閲覧可能とする閲覧手段とを備える。
【解決手段】本発明に係るセンター側システム301は、受信部326で受信したプローブ車両位置情報と、地図DB314に格納されている地図情報とに基づいて、プローブ車両151がオートクルーズで走行中か否かを判断するオートクルーズ走行判断部315と、オートクルーズ走行判断部315で判断された結果と、地図DB314に格納されている地図情報とに基づいて、車両の走行可能速度を含む交通状況を推定する交通状況推定部318と、交通状況推定部318で推定された交通状況を外部に送信する送信部327、または交通状況を外部からのアクセスによって閲覧可能とする閲覧手段とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、プローブ情報システムにおけるセンター側システム及び情報端末に関するものである。
【背景技術】
【0002】
現在、自身が走行している道路の交通情報を取得しアップロードするプローブ車両と、プローブ車両がアップロードした交通情報に基づいて渋滞情報を含む交通状況を各車両に送信(配信)するセンター側システム(例えば交通状況提供システム)とを備えるプローブ情報システムが提案されている。この技術によれば、センター側システムからの交通状況を受信した各車両は、渋滞情報に基づいて適切な経路を探索することができ、その結果、より短い時間で目的地などに到着することが可能となる。なお、現在、プローブ車両は、カーメーカのテレマティクスサービス対応車両、バスやタクシーなどの一部の車両しか適用されていないが、今後、一般的な車両にも適用されていくものと予測されている。
【0003】
さて、以上のようなプローブ情報システムにおいて、プローブ車両で取得された情報(プローブデータ)が、不正確または不適切である場合には、探索した経路を走行した方が、他の経路を走行したときよりも、目的地などに到達するまでの時間がかかってしまうことがあり、結果として、各車両は適切な経路を走行することができなくなることがある。
【0004】
そこで、このような問題を解決するために様々な技術が提案されている。例えば、特許文献1には、異常な停車などの異常動作を示すプローブデータを使用しないようにして、プローブデータを適正化する技術が開示されている。また、それに付随する技術も様々に提案されており、車両の速度を自動的に設定速度にするオートクルーズ機能をプローブ車両に追加し、設定速度で走行中に取得される情報(オートクルーズに関する情報)をプローブ情報として利用する方法が提案されている。例えば、特許文献2には、種々のセンサーを用いて検出されたオートクルーズに関する情報を含めた交通状態に関するデータを各プローブ車両から収集し、当該収集したデータと交通状態に関する現在のデータとを比較し、当該比較の結果得られた両状態間の変化を各プローブ車両がサーバから受信して情報を更新する技術が開示されている。また、特許文献3には、プローブ車両が設定速度で走行していない場合に、走行している道路が渋滞していると判断する技術が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2009−9298号公報
【特許文献2】特開2000−222693号公報
【特許文献3】特開2010−204726号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1〜3に記載の技術によれば、道路が渋滞しているか否かを各車両に送信することはできるが、渋滞道路をどれぐらいの速度で走行できるかをセンター側システムから各車両に送信するものではない。したがって、渋滞の程度によっては、渋滞道路を走行したときの方が目的地に短時間で到達できることがあり、結果として各車両は適切な経路を走行できないことがある。
【0007】
また、仮にプローブ車両の速度を各車両に配信するようにしたとしても、プローブ車両が、当該プローブ車両に固有の原因により、空いた道路を低速で走行している場合には、当該道路は空いているにもかかわらずプローブ車両の速度と同じ低速でしか走行できないと判断してしまう。したがって、この場合には、上述と同様、結果として適切な経路を走行できないことがある。
【0008】
また、特許文献2,3に記載の技術では、オートクルーズに関する情報をオートクルーズ機能を備えたプローブ車両から直接取得して外部に送信することが前提となっており、オートクルーズに関する情報をプローブ車両から直接取得することができないプローブ情報端末を備えるプローブ情報システムでは、オートクルーズに関する情報をプローブ情報端末から外部に送信することができなかった。特に、車両に後付されるナビゲーションシステム、PND(Portable Navigation Device)、スマートフォンのような持込型のプローブ情報端末を備えるプローブ情報システムにおいて顕著な問題であった。
【0009】
そこで、本発明は、上記のような問題点を鑑みてなされたものであり、プローブ車両からオートクルーズに関する情報を直接取得することができないプローブ情報端末を備えるプローブ情報システムの信頼性を高めることが可能な技術を提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明に係るセンター側システムは、プローブ車両に搭載された車両側システムから交通情報のアップロードを受ける、プローブ情報システムにおけるセンター側システムであって、少なくとも前記プローブ車両の位置に関する情報であるプローブ車両位置情報を前記車両側システムから受信する受信部と、道路情報を含む地図情報を格納している地図データベースと、前記受信部で受信した前記プローブ車両位置情報と、前記地図データベースに格納されている前記地図情報とに基づいて、前記プローブ車両がオートクルーズで走行中か否かを判断するオートクルーズ走行判断部と、前記オートクルーズ走行判断部で判断された結果と、前記地図データベースに格納されている前記地図情報とに基づいて、車両の走行可能速度を含む交通状況を推定する交通状況推定部と、前記交通状況推定部で推定された前記交通状況を外部に送信する送信部、または前記交通状況を外部からのアクセスによって閲覧可能とする閲覧手段とを備える。
【0011】
また、本発明に係る情報端末は、プローブ車両に備えられ、センター側システムに交通情報をアップロードする、プローブ情報システムに用いられる情報端末であって、前記プローブ車両のオートクルーズに関する情報であるオートクルーズ関連情報を前記センター側システムに送信する。
【発明の効果】
【0012】
本発明によれば、プローブ車両のプローブ車両位置情報と、地図データベースに格納されている地図情報とに基づいて走行可能速度を含む交通状況を推定する。したがって、推定される走行可能速度の信頼性、ひいてはプローブ情報システムの信頼性を高めることができる。
【図面の簡単な説明】
【0013】
【図1】実施の形態1に係るプローブ情報システムの構成を示すブロック図である。
【図2】実施の形態1に係るセンター側システムの処理を示すフローチャートである。
【図3】実施の形態1に係るセンター側システムの動作を示す図である。
【図4】実施の形態1に係るセンター側システムの処理を示すフローチャートである。
【図5】実施の形態1に係るセンター側システムの動作を示す図である。
【図6】実施の形態1に係るセンター側システムの動作を示す図である。
【図7】実施の形態1に係るセンター側システムの動作を示す図である。
【図8】実施の形態1に係るセンター側システムの動作を示す図である。
【図9】実施の形態2に係るセンター側システムの構成を示すブロック図である。
【図10】実施の形態2に係るセンター側システムの動作を示す図である。
【図11】実施の形態3に係るプローブ情報システムの構成を示すブロック図である。
【図12】関連プローブ情報システムの動作を示す図である。
【発明を実施するための形態】
【0014】
本発明の実施の形態について、図面に基づいて以下に説明する。
【0015】
<実施の形態1>
まず、本発明の実施の形態1に係るプローブ情報システムについて説明する前に、これらに関連するプローブ情報システム(以下「関連プローブ情報システム」と記す)を、図12を用いて説明する。
【0016】
関連プローブ情報システムは、プローブ車両151(プローブ車両151a,151b)に搭載された車両側システム100と、交通状況提供システムなどのセンター側システム301(この図12においては図示しない)とを備えている。車両側システム100は、プローブ車両151の走行道路の交通情報をセンター側システム301にアップロードし、センター側システム301は、車両側システム100から交通情報のアップロードを受け、当該交通情報に基づいて交通状況を外部(各車両)に送信する。
【0017】
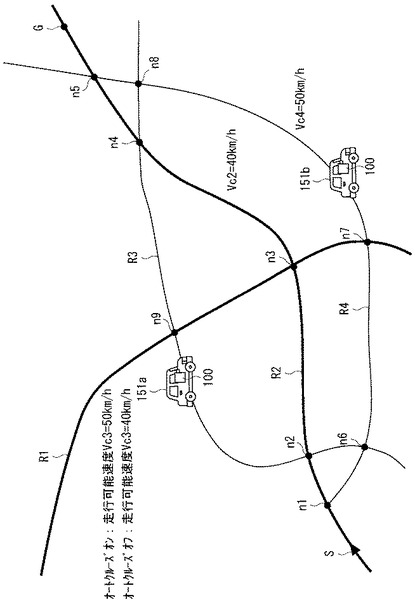
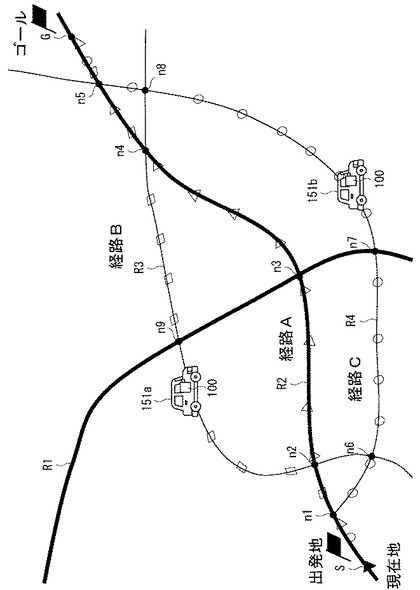
この図12において、プローブ車両151は、現在地Sと目的地Gとの間に位置しており、現在地Sから目的地Gまでの間には、ノードn1〜n9で交差する道路R1〜R4が存在している。
【0018】
道路R1〜R4のうち図12において太線で示される道路R1,R2は、VICS(登録商標)(Vehicle Information and Communication System)情報の配信対象となっている主要道路であり、ここでは、法令で定められた最大速度(以下「制限速度」)がそれぞれ60km/hであるものとする。センター側システム301は、VICS情報を受信することにより、道路R1,R2などの主要道路での走行可能速度及び渋滞情報などを取得可能となっている。なお、走行可能速度とは、対象とする道路における一般的な車両の現交通状況下で走行可能と推定される最大速度を意味するものとする。
【0019】
一方、道路R3,R4は、VICS情報の配信対象ではない主要でない道路であり、ここでは、制限速度がそれぞれ50km/hであるものとする。センター側システム301は、道路R3,R4の走行可能速度についてはVICS情報から取得できないが、プローブ車両151の車両側システム100からアップロードされた交通情報を受けることによって取得可能となっている。具体的には、センター側システム301は、プローブ車両151aの車両側システム100が送信した交通情報に含まれる速度を取得し、当該速度を道路R3での走行可能速度としている。同様に、センター側システム301は、プローブ車両151bの車両側システム100が送信した交通情報に含まれる速度を取得し、当該速度を道路R4での走行可能速度としている。
【0020】
ここで、図12において、距離(n1−n2−n3−n4−n5)=距離(n1−n2−n9−n4−n5)=50kmであるものとする。なお、距離(n1−n2−n3−n4−n5)は、ノードn1,n2,n3,n4,n5を一通り通る経路での最短距離を意味し、距離(n1−n2−n9−n4−n5)は、ノードn1,n2,n9,n4,n5を順に通る経路での距離を意味する。以下同様に記載して、距離(n1−n2)=距離(n1−n6)=距離(n4−n5)=距離(S−n1)=距離(n5−G)=10kmとし、距離(n2−n9−n4)=30kmとし、距離(n1−n6−n7−n8−n5)=60kmとする。また、道路Rnの走行可能速度についてはVcnと記載する(ここではn=1〜4)。
【0021】
以上を前提にして、以下、現在地(出発地)S近傍に位置する車両が、センター側システム301から走行可能速度Vcnを受信した場合に、現在地Sから目的地Gまでの経路を探索する一般的な処理について説明する。
【0022】
一般的な周知の経路探索ロジックによれば、現在地Sから目的地Gまでの経路探索は、現在地Sから目的地Gまでの各経路のリンクコスト(通行コスト)が計算され、コストが最も小さい経路が第1候補(最適経路)として提示される。一般に、リンクのコストは、リンクコスト=(リンクの距離/走行可能速度)×α(係数)により計算される。この場合に、図12に示す経路AのコストAは、S−n1−n2−n3−n4−n5−Gのリンクコストの総和となることから、(70/Vc2)×αとなる。同様に、経路BのコストBは、S−n1−n2−n9−n4−n5−Gのリンクコストの総和となることから、(40/Vc2+30/Vc3)×αとなる。同様に、経路CのコストCは、S−n1−n6−n7−n8−n5−Gのリンクコストの総和となることから、(20/Vc2+60/Vc4)×αとなる。なお、以下においては、説明を簡単化するためにα=1とする。
【0023】
コストA〜Cは、以上の式から分かるように、センター側システム301から与えられる走行可能速度Vc2〜Vc4によって決定される。この走行可能速度Vc2〜Vc4の組み合わせは様々であるが、以下においては、3つのケースについて説明する。
【0024】
まず、道路R1〜R4のいずれにおいても渋滞がない場合(ケース1)について説明する。この場合、走行可能速度Vc2,Vc3,Vc4は、それぞれ制限速度と同じ60km/h,50km/h,50km/hとすることができ、上述のコストA,B,Cは、それぞれ(70/60)=35/30,(40/60+30/50)=38/30,(20/60+60/50)=46/30となる。すなわち、この場合には、コストA<コストB<コストCとなることから、最適経路として、図12において三角印が複数付された経路Aが選択される。
【0025】
次に、道路R2の走行可能速度が渋滞の発生により40km/hとなっていることを示すVICS情報がセンター側システム301に受信され、その他の道路R1,R3,R4においては渋滞がない場合(ケース2)について説明する。この場合、走行可能速度Vc2が変更されて、走行可能速度Vc2,Vc3,Vc4は、それぞれ40km/h,50km/h,50km/hとなり、上述のコストA,B,Cは、それぞれ(70/40)=35/20,(40/40+30/50)=32/20,(20/40+60/50)=34/20となる。すなわち、この場合には、コストB<コストC<コストAとなることから、最適経路として、図12において四角印が複数付された経路Bが選択される。
【0026】
次に、センター側システム301が、ケース2と同じVICS情報を受信し、かつ、道路R3の車両側システム100から40km/hの速度を受信し、道路R4の車両側システム100から50km/hの速度を受信した場合(ケース3)について説明する。この場合、走行可能速度Vc2〜Vc4が変更されて、走行可能速度Vc2,Vc3,Vc4は、それぞれ40km/h,40km/h,50km/hとなり、上述のコストA,B,Cは、それぞれ(70/40)=35/20,(40/40+30/40)=35/20,(20/40+60/50)=34/20となる。すなわち、この場合には、コストC<コストA=コストBとなることから、最適経路として、図12において丸印が複数付された経路Cが選択される。
【0027】
さて、上述のケース3においては、プローブ車両151aは、道路R3の制限速度(50km/h)以下の速度(40km/h)で走行していた。ここで、道路R3での渋滞などが原因で、プローブ車両151aが、制限速度より遅い速度でしか走行できなかったのであれば、経路Cが最適経路として選択されることは適切である。しかしながら、道路R3が空いているにもかかわらず、プローブ車両151aがそれに固有の原因により、空いた道路を制限速度よりも遅い速度で走行している場合には、プローブ車両151aの後方車両はプローブ車両151aを追い抜くことができると考えられる。
【0028】
つまり、この場合には、プローブ車両151aの後方車両はプローブ車両151aの速度以上の速度(ここでは制限速度)で走行することが可能であることから、道路R3が制限速度で走行されていたケース2と同様に、経路Bが最適経路として選択されるべきである。そうであるにもかかわらず、経路Cが最適経路として選択されることは、車両のユーザーに適切でない経路を走行させることとなり、余分な時間及び燃料を使用させることとなる。また、CO2を増加させることになることから、エコロジーの観点からも社会的な損失を伴うことになる。
【0029】
また、従来では、オートクルーズに関する情報をオートクルーズ機能を備えたプローブ車両から直接取得して外部に送信することが前提となっており、オートクルーズに関する情報をプローブ車両から直接取得することができないプローブ情報端末を備えるプローブ情報システムでは、オートクルーズに関する情報をプローブ情報端末から外部に送信することができなかった。したがって、センター側システムは、正確な交通情報を車両側システムから受信することができず、正確な交通状況を外部(各車両)に送信することができなかった。
【0030】
そこで、本実施の形態に係るプローブ情報システムによれば、プローブ車両からオートクルーズに関する情報を直接取得することができないプローブ情報端末を車両側システムに備えたとしても、センター側システムは正確な交通状況を外部(各車両)に送信することができ、プローブ情報システムの信頼性を高めることが可能となっている。以下、このようなプローブ情報システムについて説明する。
【0031】
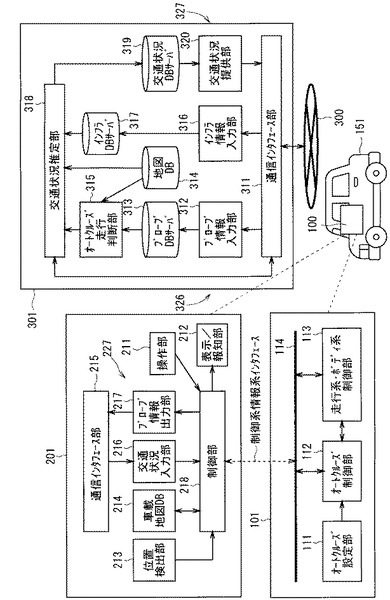
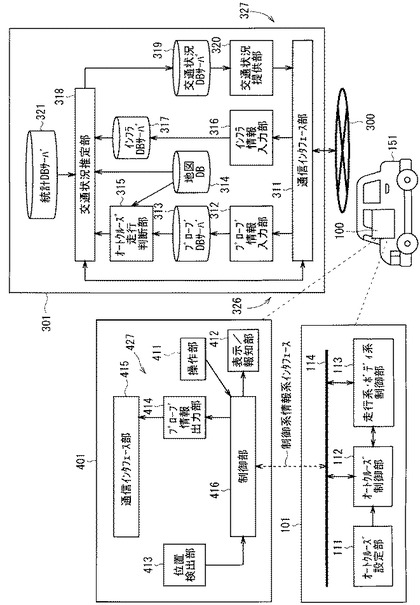
図1は、本実施の形態1に係るプローブ情報システムの構成を示すブロック図である。なお、図1においては、以上で説明した構成要素と類似するものについては同じ符号を付している。この図1に示すように、このプローブ情報システムは、上述の関連プローブ情報システムと同様、プローブ車両151の交通情報をセンター側システム301にアップロードする車両側システム100と、車両側システム100から当該交通情報のアップロードを受けるセンター側システム301とを備えている。また、車両側システム100は、車両制御部101と、プローブ情報端末201とを備えている。なお、車両制御部101(車両制御系)とプローブ情報端末201(情報系)とは、両者間で情報通信及び制御を行うために制御系情報系インタフェース(例えば、LAN)が設置されるが、本実施の形態では制御系情報系インタフェースは設置されていないものとする。これは、通常、工場出荷後の市販の後付装着するカーナビゲーション装置やPNDには制御系情報系インタフェースが設置されておらず、本実施の形態に係るプローブ情報端末は当該カーナビゲーション装置やPNDを想定しているためである。また、ここでのアップロードは、通信ネットワーク300を介して行われるものとする。
【0032】
プローブ情報端末201は、ユーザーからの操作を受け付ける操作部211と、様々な情報を表示/報知する表示/報知部212と、位置検出部213と、車載地図DB(データベース)214と、通信インタフェース部215と、交通状況入力部216と、プローブ情報出力部217と、操作部211で受け付けた操作などに基づいて各構成要素を統括的に制御するCPUなどからなる制御部218とを備えている。
【0033】
車両制御部101は、オートクルーズ設定部111と、オートクルーズ制御部112と、走行系・ボディ系制御部113とを備えている。また、オートクルーズ設定部111、オートクルーズ制御部112、及び、走行系・ボディ系制御部113は、車内LAN114を介して接続されている。
【0034】
なお、車両制御部101の車内LAN114と、プローブ情報端末201の制御部218とは、制御系情報系インタフェースで接続されていないため、制御部218は、車内LAN114及び制御系情報系インタフェースを介して、オートクルーズ制御部112及び走行系・ボディ系制御部113から各種情報を受け取ることができない。
【0035】
次に、車両制御部101の各構成要素について説明する。
【0036】
走行系・ボディ系制御部113は、走行系制御部及びボディ系制御部から構成されている。走行系制御部は、プローブ車両151の走行を制御する装置群から構成されており、例えば、エンジン回転数、ブレーキ系装置などを制御してプローブ車両151の速度を制御したり、シャフトの姿勢などを制御してプローブ車両151の進行方向を制御したりする。また、走行系制御部は、車輪の回転速度に応じた車速パルスに基づいてプローブ車両151の速度を検出する。ボディ系制御部は、プローブ車両151での走行に直接関わらない動作を制御する装置群から構成されており、例えば、ワイパーの駆動、灯火情報の伝達、ウィンカーの点灯、ドアの開閉、窓の開閉などを制御する。なお、走行系・ボディ系制御部113は、図示しない制御部によって制御されており、また、オートクルーズ制御部112によっても制御される。
【0037】
オートクルーズ制御部112は、オートクルーズ機能(クルーズコントロール機能)により、プローブ車両151の走行を制御する。本実施の形態では、オートクルーズ設定部111においてオートクルーズ機能がオンに設定され、かつ、所定速度が設定されている場合に、オートクルーズ制御部112は、プローブ車両151の走行速度が、当該設定された設定速度と等しくなるように、走行系・ボディ系制御部113のエンジン回転数、ブレーキ系装置の制御などを制御する。
【0038】
なお、オートクルーズ機能の種類の一つとして、先行車両などを検出し、自車と当該先行車両との間隔を自動的に一定距離に保つ間隔保持機能がオートクルーズ機能に付加されたアダバンスオートクルーズ機能と呼ばれるものがある。以下の説明においては、オートクルーズ機能は、特に言及しない限り、間隔保持機能が付加されていないオートクルーズ機能を意味するものとする。
【0039】
オートクルーズ設定部111では、上述のオートクルーズ機能の設定が行われる。本実施の形態では、一般的な方向指示器と同様に、設定バー(図示せず)がハンドル近傍に設けられている。そして、設定バーにおいて所定操作が行われた場合には、オートクルーズ設定部111においてオートクルーズ機能がオンに設定され、ブレーキ操作が行われた場合には、オートクルーズ設定部111においてオートクルーズ機能がオフに設定される。また、設定バーのグリップを回すなどの所定操作が行われた場合には、オートクルーズ設定部111において、設定速度が変更されたり、オートクルーズ機能がオフに設定されたりする。
【0040】
次に、プローブ情報端末201の各構成要素について説明する。
【0041】
位置検出部213は、GPS(Global Positioning System)装置、ヨーレートセンサー及び加速度センサーなどから構成され、プローブ車両151の位置に関する情報であるプローブ車両位置情報を検出する。ここでは、位置検出部213は、経度緯度などの絶対座標上でのプローブ車両151のプローブ車両位置情報として自車位置情報Pk=(xk,yk)を検出するものとする。
【0042】
車載地図DB214には、絶対座標やリンク番号が付加された地図データと、目的地に設定可能な施設に関する情報(例えば、施設の固有名称及び一般名称、地図上での施設の座標位置などの情報)とを含む地図情報が記憶されている。本実施の形態に係るプローブ情報端末201は、この車載地図DB214の情報を利用することにより、目的地までの走行経路を探索したり、その走行経路に沿って車両のユーザーを目的地まで誘導したりするナビゲーション機能を有している。
【0043】
通信インタフェース部215は、通信ネットワーク300を介してセンター側システム301などと通信する。交通状況入力部216は、通信インタフェース部215が受信した情報を制御部218に与える。プローブ情報出力部217は、プローブ車両151内の情報を通信インタフェース部215に与え、通信インタフェース部215は、プローブ情報出力部217からの情報をセンター側システム301などに送信する。
【0044】
本実施の形態では、以上で説明した通信インタフェース部215及びプローブ情報出力部217が、送信部である車両側送信部227を構成している。このように構成された車両側送信部227は、位置検出部213で検出されたプローブ車両位置情報を、通信ネットワーク300を介してセンター側システム301に所定の時間ごとに送信する。なお、車両側システム100が送信するプローブ車両位置情報は、以下「車両送信情報」と記すこともある。なお、本実施の形態では、この車両送信情報は、車両側システム100がアップロードする交通情報と一致している。
【0045】
また、プローブ情報端末201は、プローブ車両151を特定するID(プローブ車両ID)や、プローブ情報端末201を特定するID(プローブ情報端末ID)を、車両送信情報とともにセンター側システム301に送信している。
【0046】
次に、センター側システム301の構成について説明する。
【0047】
図1に示すように、センター側システム301は、通信インタフェース部311と、プローブ情報入力部312と、プローブDBサーバ313と、地図DB314と、オートクルーズ走行判断部315と、インフラ情報入力部316と、インフラDBサーバ317と、交通状況推定部318と、交通状況DBサーバ319と、交通状況提供部320とを備えている。なお、本実施の形態では、交通状況推定部318は、センター側システム301を統括的に制御している。
【0048】
次に、センター側システム301の各構成要素について説明する。
【0049】
通信インタフェース部311は、通信ネットワーク300を介して、プローブ車両151の車両側システム100、他のプローブ情報システム及びVICSセンター(いずれも図示せず)などと通信する。ここでは、通信インタフェース部311は、通信ネットワーク300を介して、車両側システム100から送信された車両送信情報を受信する。なお、車両送信情報は、プローブ車両151から直接的に受信した車両送信情報であってもよいし、他のプローブ情報システムを介して間接的に受信した車両送信情報であってもよい。
【0050】
プローブ情報入力部312は、通信インタフェース部311で受信した車両送信情報を、プローブDBサーバ313に与える。
【0051】
プローブDBサーバ313は、プローブ情報入力部312からの車両送信情報を、道路及び時間をパラメータとして、道路及び時間ごとに記憶する。
【0052】
地図DB314は、道路の勾配情報・カーブ情報などの道路情報を含む地図情報を記憶する。
【0053】
オートクルーズ走行判断部315は、プローブDBサーバ313に記憶されている車両送信情報と、地図DB314に記憶されている地図情報とに基づいて、車両送信情報の送信元であるプローブ車両151がオートクルーズの設定速度で走行中か否かを判断し、オートクルーズの設定速度で走行中であると判断した場合は、当該プローブ車両151をオートクルーズの設定速度で走行中の車両であると判断する。
【0054】
インフラ情報入力部316は、通信インタフェース部311で受信されたVICS情報やインフラ情報を、インフラDBサーバ317に与える。
【0055】
VICS情報は、VICSセンターからの情報であり、例えば、主要道路における走行可能速度や、渋滞情報を含んでいる。インフラ情報は、VICSセンターや他のプローブ情報システムからの情報であり、例えば、現在の日時や道路ごとの天候を示す情報を含んでいる。なお、インフラ情報の各種情報の供給元は適宜変更されてもよく、例えば、現在の日時はセンター側システム301において供給(計測)されてもよいし、天候を示す情報は車両から供給(送信)されてもよい。
【0056】
インフラDBサーバ317は、インフラ情報入力部316からのVICS情報及びインフラ情報を、例えばプローブDBサーバ313と同様に道路及び時間をパラメータとして記憶する。
【0057】
本実施の形態では、上述した通信インタフェース部311及びプローブ情報入力部312が、受信部であるセンター側受信部326を構成している。このように構成されたセンター側受信部326は、車両送信情報、つまりプローブ車両151のプローブ車両位置情報や、プローブ車両151のプローブ車両速度情報を、プローブ車両151の車両側システム100から受信する。
【0058】
交通状況推定部318は、オートクルーズ走行判断部315で推定された結果と、地図DB314に記憶されている地図情報とに基づいて、上述の走行可能速度を含む交通状況を推定する。つまり、交通状況推定部318は、オートクルーズ走行判断部315で推定された結果と、地図DB314に記憶されている地図情報とに基づいて、各道路における車両の走行可能速度を含む交通状況を推定する。また、本実施の形態では、交通状況推定部318は、走行可能速度を推定するだけでなく、センター側受信部326で受信したプローブ車両位置情報と地図DB314に記憶されている地図情報とに基づいて、当該走行可能速度の信頼度を推定し、当該信頼度を上述の交通状況に含める。また、交通状況推定部318は、車両送信情報やインフラ情報などに基づいて渋滞情報も推定し、当該渋滞情報を上述の交通状況に含める。なお、交通状況推定部318での、走行可能速度及び信頼度の推定については後で詳細に説明する。
【0059】
交通状況DBサーバ319は、交通状況推定部318が求めた走行可能速度、信頼度、渋滞情報などを含む交通状況(以下「配信交通状況」と呼ぶこともある)を道路ごとに記憶する。また、交通状況DBサーバ319は、オートクルーズ走行判断部315においてオートクルーズの設定速度で走行中であると判断されたプローブ車両151はオートクルーズ機能付きの車両であるとして、当該プローブ車両151のプローブ車両IDを記憶する。
【0060】
交通状況提供部320は、交通状況DBサーバ319に記憶された配信交通状況を通信インタフェース部311に与え、通信インタフェース部311は、当該配信交通状況を、プローブ車両151の車両側システム100や、他のプローブ情報システムなどの外部に送信(発信)する。
【0061】
本実施の形態では、以上で説明した通信インタフェース部311及び交通状況提供部320が、送信部であるセンター側送信部327を構成している。このように構成されたセンター側送信部327は、交通状況推定部318で推定された配信交通状況をプローブ車両151の車両側システム100などの外部に送信する。本実施の形態では、配信交通状況が道路ごとに交通状況DBサーバ319に記憶されていることから、センター側送信部327は、道路ごとの配信交通状況を送信することが可能となっている。なお、このセンター側送信部327の代わりに、例えばインターネットブラウザのように、上記配信交通状況を外部からのアクセスによって閲覧可能とする閲覧手段を備える構成であってもよい。
【0062】
次に、本実施の形態の特徴であるオートクルーズ走行判断部315の処理について説明する。図2は、オートクルーズ走行判断部315の処理を示すフローチャートである。
【0063】
ステップS21にて、オートクルーズ走行判断部315には、プローブDBサーバ313からプローブ車両位置情報を含む車両送信情報が時系列で入力される。
【0064】
ステップS22にて、オートクルーズ走行判断部315には、地図DB314からプローブ車両151が走行した道路データである地図情報が入力される。
【0065】
ステップS23にて、プローブDBサーバ313から入力された車両送信情報と、地図DB314から入力された地図情報とに基づいて、プローブ車両151がオートクルーズの設定速度で走行中であることを検出したか否か(つまり、プローブ車両151がオートクルーズの設定速度で走行中であるか否か)を判断する。
【0066】
ここで、プローブ車両151がオートクルーズの設定速度で走行中であるか否かの判断について説明する。オートクルーズの設定速度で走行中であるか否かは、以下の3つのロジック(ロジック1〜3)に基づいて判断する。
【0067】
まず、ロジック1について説明する。
【0068】
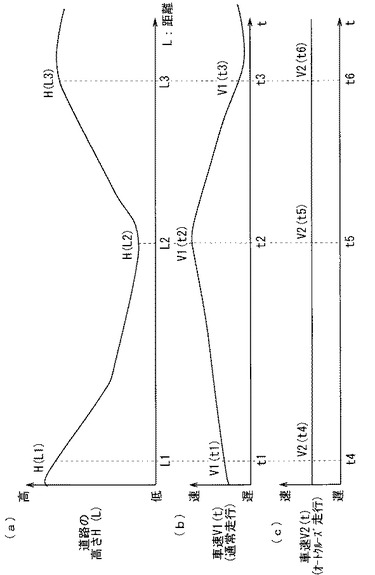
図3は、勾配のある道路を走行する車両の速度について示した図である。図3(a)は、道路の距離Lと高さH(L)との関係を示しており、L1のときの高さはH(L1)であり、L2のときの高さはH(L2)であり、L3のときの高さはH(L3)である。図3(a)に示すように、L1−L2区間の道路は下りの勾配であり、L2−L3区間の道路は上りの勾配である。また、図3(b),(c)は車両の走行時間と速度との関係を示しており、t1〜t6は図3(a)のL1〜L3を通過する時間を示している。つまり、t1,t4はL1を通過する時間を示し、t2,t5はL2を通過する時間を示し、t3,t6はL3を通過する時間を示している。また、図3(b)は、図3(a)に示す道路を車速V1(t)で通常走行する場合を示しており、図3(c)は、図3(a)に示す道路を車速V2(t)でオートクルーズ機能がオンの状態で走行する場合を示している。
【0069】
図3(b)に示すように、車速V1(t)で通常走行する車両は、L1−L2区間で車速が徐々に速くなり(車速がV1(t1)からV1(t2)となり)、L2(高さが最も低いH(L2))で最高の車速V1(t2)となる。そして、L2−L3区間で車速が徐々に遅くなる(車速がV1(t2)からV1(t3)となる)。
【0070】
一方、図3(c)に示すように、車速V2(t)でオートクルーズオン状態で走行する車両は、L1−L3区間で、車速V2(t)=V2(t4)=V2(t5)=V2(t6)で走行する。つまり、オートクルーズの設定速度で走行する車両は、道路の勾配の有無に関わらず一定の速度で走行する。
【0071】
このように、ロジック1では、道路の勾配の有無に関わらず一定の速度で走行する車両をオートクルーズの設定速度で走行していると判断する。
【0072】
次に、ロジック2について説明する。
【0073】
通常走行において、長時間(例えば、20分以上)、速度を一定にして走行することは困難である。したがって、ロジック2では、長時間一定の速度で走行している車両をオートクルーズの設定速度で走行していると判断する。
【0074】
最後に、ロジック3について説明する。
【0075】
通常、走行中にカーブに差し掛かると、速度を落としてカーブ区間を走行する。一方、オートクルーズの設定速度で走行している場合は、カーブ区間を一定の速度で走行する場合がある。したがって、ロジック3では、カーブ区間を一定の速度で走行している車両をオートクルーズの設定速度で走行していると判断する。
【0076】
上記のロジック1〜3に基づいて、1つまたは複数組合せて重み付けを付与した所定の計算式によってオートクルーズ確定度gを算出し、算出したオートクルーズ確定度gにより車両がオートクルーズの設定速度で走行中であるか否かの判断を行う。
【0077】
オートクルーズ確定度gは、例えば以下の式(1)により求められる。
【0078】
g=f1×K1+f2×K2+f3×K3 ・・・(1)
ここで、f1,f2,f3の各々は、車両の走行状況がロジック1〜3の各々に該当する程度を示す該当度を示している。また、K1,K2,K3の各々は、ロジック1〜3の各々に対する重み付けを示している。
【0079】
例えば、オートクルーズ確定度gを上記の式(1)で算出する場合において、
f1=1.5(30分以内にロジック1に該当する状況を3回以上検出した)
f1=1 (30分以内にロジック1に該当する状況を2回検出した)
f1=0.5(30分以内にロジック1に該当する状況を1回検出した)
f1=0 (上記以外)
また、
f2=2 (30分以上に亘ってロジック2に該当する状況を検出した)
f2=1 (20分以上に亘ってロジック2に該当する状況を検出した)
f2=0 (上記以外)
また、
f3=1 (30分以内にロジック3に該当する状況を2回以上検出した)
f3=0.5(30分以内にロジック3に該当する状況を1回検出した)
f3=0 (上記以外)
ここで、K1=1.0、K2=1.5、K3=0.5とし、オートクルーズ確定度g≧2.5の場合は、車両がオートクルーズの設定速度で走行中であると判断する。ただし、上記の判断ロジックは一例であり、この式にこだわるものではない。
【0080】
図2に戻って、以上で説明したステップS23でプローブ車両151がオートクルーズの設定速度で走行中であると判断された場合は、ステップS24にて、当該プローブ車両151はオートクルーズ機能付きの車両であるとして、当該プローブ車両151のID(プローブ車両ID)を交通状況DBサーバ319に記憶する。そして、ステップS25にて、上記プローブ車両151は現在の速度をオートクルーズの設定速度で走行中であると判断する。
【0081】
一方、ステップS23でプローブ車両151がオートクルーズの設定速度で走行中でないと判断された場合は、ステップS26にて、プローブ車両151が過去にオートクルーズ機能付きの車両であると判断した否かを判断する。プローブ車両151が過去にオートクルーズ機能付きの車両であると判断したか否かは、過去にステップS24にてプローブ車両151のIDが交通状況DBサーバ319に記憶されたか否かで判断することができる。
【0082】
ステップS26にてプローブ車両151が過去にオートクルーズ機能付きの車両であると判断された場合は、ステップS27にて、オートクルーズ機能付きのプローブ車両151がオートクルーズ機能がオフの状態で走行中であると判断する。
【0083】
一方、ステップS26にてプローブ車両151が過去にオートクルーズ機能付きの車両でないと判断された場合は、ステップS28にて、オートクルーズ機能付きでないプローブ車両151が現在の速度で走行中であると判断する。
【0084】
次に、図4を用いてセンター側システム301の処理について説明する。
【0085】
ステップS41にて、インフラ情報入力部316は、通信インタフェース部311で受信されたVICS情報などをインフラDBサーバ317に与え、インフラDBサーバ317は当該VICS情報などを記憶(セーブ)する。ステップS42にて、交通状況推定部318は、オートクルーズ走行判断部315から、オートクルーズ走行判断部315での判断結果と、車両送信情報とを取得する。
【0086】
ステップS43にて、交通状況推定部318は、例えばセンター側システム301に予め記憶された規定ルールに従い、ステップS41で記憶されたVICS情報、及び、ステップS42で取得した車両送信情報及びオートクルーズ走行判断部315での判断結果に基づいて、走行可能速度及び信頼度等を含む交通状況を推定する。
【0087】
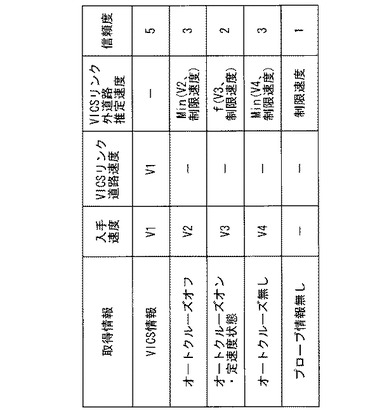
図5は、当該規定ルールの一例を示す図である。この図5に示される規定ルールでは、交通状況推定部318が取得した情報の種別を示す取得情報と、交通状況推定部318が推定結果とすべき走行可能速度(推定速度)及び信頼度とが対応付けられている。信頼度は、ここでは「1〜5」までの1つの数字で表され、数字が大きくなるにつれて信頼度が高くなるものとする。
【0088】
次に、交通状況推定部318が、図5に示される規定ルールに従い、走行可能速度及び信頼度を推定する処理について説明する。
【0089】
まず、対象の道路が主要道路であり、当該道路についてVICS情報が得られた場合には、交通状況推定部318は、当該道路の走行可能速度を、VICS情報が示す速度V1と推定し、当該推定した走行可能速度の信頼度を「5」に推定する。
【0090】
対象の道路が主要道路でない場合には、交通状況推定部318は、ステップS42にて取得した判断結果及び車両送信情報に基づいて以下のように走行可能速度及び信頼度を求める。なお、以下の説明においては、オートクルーズ機能のオン/オフの設定は、オートクルーズ走行判断部315にて判断された結果に基づくものとする。
【0091】
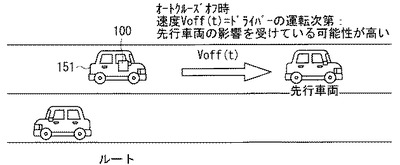
オートクルーズ設定情報がオフの設定を示す場合には、図6に示されるように、プローブ車両151が先行車両の影響を受けている可能性が高く、当該プローブ車両151の後方車両も、プローブ車両151の速度V2までしか速度を上げることができないと考えられる。そこで、この場合には、交通状況推定部318は、プローブ車両151が走行している道路の走行可能速度を、車両送信情報のプローブ車両位置情報に基づいて算出されたプローブ車両151の速度V2と推定する。
【0092】
ただし、プローブ車両151の速度V2が、法定の制限速度を超えて走行している場合には、法令遵守の観点から、走行可能速度をプローブ車両151の速度V2と推定すべきではない。そこで、本実施の形態に係る交通状況推定部318は、ここでの走行可能速度を、上記のプローブ車両151の速度V2、及び、制限速度の小さい方と推定する。図5に示されるMin(V2,制限速度)は、このことを意味している。なお、走行可能速度を推定するのに用いられる制限速度は、例えば、車両送信情報のプローブ車両位置情報に基づいて、プローブ車両位置情報(道路)と制限速度とが予め対応付けられた地図DB314から取得される。
【0093】
また、この場合に、交通状況推定部318は、推定した走行可能速度の信頼度を例えば「3」に推定する。
【0094】
一方、オートクルーズ設定情報がオンの設定を示す場合には、図7に示されるように、プローブ車両151の前に先行車両が存在しない可能性が高く、当該プローブ車両151の後方車両は、プローブ車両151の速度V3以上で走行できると考えられる。そこで、この場合には、交通状況推定部318は、プローブ車両151が走行している道路の走行可能速度を、車両送信情報のプローブ車両位置情報に基づいて算出されたプローブ車両151の速度V3以上であり、かつ、制限速度以下の値となるf(V3,制限速度)と推定する。
【0095】
ここで、f(V3,制限速度)は、速度V3及び制限速度の関数である。このf(V3,制限速度)は、速度V3以上であり、かつ、制限速度以下の値をとるのであれば、どのような関数であってもよく、例えば、f(V3,制限速度)=制限速度としてもよいし、f(V3,制限速度)={(制限速度)+V3}/2としてもよい。以下においては、説明を簡単にするため、f(V3,制限速度)=制限速度として説明する。
【0096】
また、この場合に、交通状況推定部318は、推定した走行可能速度の信頼度を例えば「2」に推定する。
【0097】
以上の処理だけでなく、本実施の形態に係る交通状況推定部318は、オートクルーズ機能を有さないプローブ車両から速度V4を取得した場合には、当該プローブ車両に係る道路の走行可能速度を、当該速度V4、及び、制限速度のうちの小さい方と推定する。そして、この場合に、交通状況推定部318は、当該推定した走行可能速度の信頼度を例えば「3」に推定する。また、交通状況推定部318は、対象の道路に対して何もプローブ車両速度情報が得られなかった場合(プローブ情報無しの場合)には、当該道路の走行可能速度を当該道路の制限速度と推定し、当該推定した走行可能速度の信頼度を例えば「1」に推定する。
【0098】
図8は、図4のステップS43での交通状況推定部318の処理の例を説明するための図である。この図には、図12で説明した、VICS情報の対象となる主要道路R1,R2と、VICS情報の対象でない主要でない道路R3,R4とが示されている。また、図12の説明と同様に、道路R1,R2の制限速度はそれぞれ60km/hであり、道路R3,R4の制限速度はそれぞれ50km/hとする。そして、プローブ車両151aは道路R3を走行し、プローブ車両151bは道路R4を走行しているものとする。
【0099】
以上において、センター側システム301が、道路R2の走行可能速度として40km/hを示すVICS情報を受信した場合には、交通状況推定部318は、道路R2の走行可能速度Vc2を40km/hと推定する。なお、この走行可能速度の信頼度は「5」であるため、プローブ車両151から異なる速度の走行可能速度を受信した場合であっても、センター側システム301は、道路R2の走行可能速度Vc2を40km/hと推定する。
【0100】
プローブ車両151aにおいてオートクルーズ機能がオフに設定されている場合に、センター側システム301が、プローブ車両151aの車両側システム100から40km/hを示すプローブ車両速度情報(車両送信情報)を受信した場合には、交通状況推定部318は、道路R3の走行可能速度Vc3を、プローブ車両151aの速度(40km/h)と推定する。一方、プローブ車両151aにおいてオートクルーズ機能がオンに設定されている場合に、センター側システム301が、プローブ車両151aの車両側システム100から50km/hを示すプローブ車両速度情報(車両送信情報)を受信した場合には、交通状況推定部318は、道路R3の走行可能速度Vc3を、プローブ車両151aの速度以上の速度(ここでは制限速度と同じ50km/h)と推定する。
【0101】
なお、プローブ車両151bの車両側システム100における動作は、プローブ車両151aの車両側システム100における動作と同様であるため、具体的な説明は省略する。ここでは、プローブ車両151bの車両側システム100の動作の結果として、プローブ車両151bが走行している道路R4の走行可能速度Vc4が、50km/hと推定されたものとする。
【0102】
以上のような車両側システム100及びセンター側システム301によれば、道路R3が渋滞しており、プローブ車両151aがオートクルーズ機能をオフした状態で低速(40km/h)で走行している場合には、道路R3の走行可能速度Vc3は、プローブ車両151aと同じ速度(40km/h)であると推定される。したがって、この場合には、走行可能速度Vc2〜Vc4は、図12で説明したケース3と同じ走行可能速度となることから、現在地S近傍に位置する各車両においては、ケース3と同様に経路Cが最適経路として選択されることになる。
【0103】
一方、道路R3が空いているにもかかわらず、プローブ車両151aがオートクルーズ機能をオンした状態で低速(40km/h)で走行している場合には、道路R3の走行可能速度Vc3は、プローブ車両151aの速度以上(ここでは制限速度と同じ50km/h)であると推定される。したがって、この場合には、走行可能速度Vc2〜Vc4は、図12で説明したケース2と同じ走行可能速度となることから、現在地S近傍に位置する各車両においてはケース2と同様に経路Bが最適経路として選択されることになる。
【0104】
以上のように、本実施の形態に係る車両側システム100及びセンター側システム301によれば、各車両において、車両送信情報に基づく適切な経路を走行することが可能となる。
【0105】
図4に戻って、以上で説明したステップS43にて、交通状況推定部318は、求めた走行可能速度及び信頼度を含む配信交通状況を道路ごとに交通状況DBサーバ319に記憶(セーブ)する。
【0106】
ステップS44にて、センター側システム301から配信交通状況を取得したい車両や他のプローブ情報システムが、センター側システム301にアクセスする。センター側システム301が当該アクセスを受けると、センター側送信部327は、交通状況DBサーバ319で記憶された配信交通状況を外部に送信(発信)する。この際、センター側送信部327は、アクセス元が望む配信交通状況を当該アクセス元だけが受信することができるように、ID情報を配信交通状況に付加して送信(発信)する。
【0107】
ステップS45にて、処理が終了したかを判断する。処理が終了したと判断した場合には図4に示す処理を終了し、そうでない場合にはステップS41に戻る。本実施の形態では、センター側システム301は、処理が終了したと判断するまで、ステップS41〜S45の処理を行う。
【0108】
以上のような本実施の形態に係るプローブ情報システムによれば、センター側システム301は、少なくとも車両側システム100から取得したプローブ車両位置情報と、地図DB314に記憶されている地図情報とに基づいて走行可能速度(交通状況)を推定する。したがって、プローブ車両151からオートクルーズに関する情報を直接取得することができないプローブ情報端末201を車両側システム100に備えたとしても、センター側システム301は正確な交通状況を外部(各車両)に送信することができる。よって、推定される走行可能速度の信頼性、ひいてはプローブ情報システムの信頼性を高めることができる。
【0109】
また、本実施の形態では、センター側システム301は、プローブ車両位置情報と地図情報とに基づいて、走行可能速度の信頼度(交通状況)も推定する。したがって、外部(各車両)にて、走行可能速度を適切に用いることができる。
【0110】
また、本実施の形態では、センター側システム301は、道路の勾配情報やカーブ情報を含む地図情報に基づいて、プローブ車両がオートクルーズの設定速度で走行中か否かを判断している。したがって、外部(各車両)にて、走行可能速度を適切に用いることができる。
【0111】
また、本実施の形態では、センター側システム301は、プローブ車両151がオートクルーズの設定速度で走行中であると判断すると、当該プローブ車両151のID(プローブ車両ID)を記憶する。したがって、センター側システム301は、プローブ車両151が過去にオートクルーズ機能付きの車両であると判断したか否かを確認することができ、推定される走行可能速度の信頼性を高めることができる。
【0112】
また、本実施の形態では、センター側システム301は、プローブ車両151がオートクルーズの設定速度で走行中であると判断すると、走行可能速度は当該プローブ車両151の速度以上であると推定し、また、プローブ車両151がオートクルーズの設定速度で走行中でないと判断すると、走行可能速度は当該プローブ車両151の速度であると推定する。したがって、推定される走行可能速度の信頼性を高めることができる。
【0113】
なお、以上の説明では、センター側システム301は、車両側システム100から受信したプローブ車両位置情報に基づいてプローブ車両151の速度を算出しているが、プローブ車両151の速度に関する情報であるプローブ車両速度情報を車両送信情報として車両側システム100から受信してもよい。センター側システム301は、プローブ車両速度情報を受信することによって、プローブ車両位置情報に基づくプローブ車両の速度の算出処理を省略することができる。車両側システム100がプローブ車両速度情報をセンター側システム301に送信する場合において、プローブ情報端末201の制御部218は、プローブ車両151に備えられた車速センサーに接続され、当該車速センサーから車速パルスを取得し、取得した車速パルスに基づいてプローブ車両151の速度(プローブ車両速度情報)を算出する。そして、制御部218で算出されたプローブ車両速度情報は、プローブ車両位置情報とともに車両送信情報として車両側送信部227からセンター側システム301に送信される。
【0114】
また、以上の説明では、図2のステップS24において、センター側システム301は、プローブ車両151がオートクルーズの設定速度で走行中であると判断すると、当該プローブ車両151のプローブ車両IDを交通状況データベースサーバに記憶するようにしたが、これに限ったものではない。例えば、プローブ車両151に搭載された車両側システム100のID(車両側システムID)や、プローブ情報端末201のIDであってもよい。
【0115】
また、以上の説明では、センター側システム301と、VICSセンターとは個別のセンターであるとしたが、これに限ったものではない。例えば、センター側システム301そのものが、VICSセンターであってもよい。
【0116】
また、以上の説明では、図4ステップS44において、センター側システム301が配信先を特定して配信交通状況を送信したが、この配信交通状況の送信は、これに限ったものではない。例えば、センター側送信部327は、各道路に対応付けた配信交通状況を一定時間ごとにブロードキャストで送信(発信)し、車両側システム100が、必要な走行可能情報を自身で判断して取得するものであってもよい。
【0117】
また、以上で説明した構成において、センター側システム301は、プローブ車両151が蛇行運転など通常走行の範囲外で走行していると判断した場合に、当該プローブ車両151の車両送信情報に基づいて推定される走行可能速度の信頼度を低くしたり、当該車両送信情報そのものを採用しないようにしたりしてもよい。なお、通常走行の範囲外か否かの検出は、例えば、地図上でのプローブ車両151の位置の推移などに基づいて行えばよい。
【0118】
また、以上の説明では、位置検出部213は、経度緯度などの絶対座標上でのプローブ車両151のプローブ車両位置情報として自車位置情報Pk=(xk,yk)を検出するものとした。しかし、これに限ったものではなく、例えば、位置検出部213は、プローブ車両151の位置に対応する道路のリンク番号を検出し、当該リンク番号が自車位置情報Pkの代わりに用いられてもよい。
【0119】
また、以上の説明では、プローブ車両151がオートクルーズの設定速度で走行中か否かの判断はセンター側システム301で行うようにしているが、当該判断を車両側システム100側で行うようにしてもよい。つまり、プローブ車両151からセンター側システム301に情報(交通情報)をアップロードすべく、プローブ情報システムに適用可能なプローブ情報端末201(情報端末)が、プローブ車両151のオートクルーズに関する情報であるオートクルーズ関連情報をセンター側システム301に送信するようにしてもよい。プローブ情報端末201は車両側システム100に備えられており、プローブ車両位置情報を取得する位置検出部(取得部)と、地図情報を記憶(格納)している地図DB(データベース)と、位置検出部で取得したプローブ車両位置情報と、地図DBに記憶されている地図情報とに基づいて、プローブ車両151がオートクルーズの設定速度で走行中か否かを判断するオートクルーズ走行判断部と、オートクルーズ走行判断部で判断された結果をオートクルーズ関連情報としてセンター側システム301に送信する送信部とを備えている。なお、地図DB及びオートクルーズ走行判断部は、上述のセンター側システム301が備える地図DB314及びオートクルーズ走行判断部315にそれぞれ対応している。センター側システム301は、車両側システム100から受信したオートクルーズ関連情報に基づいて走行可能速度(交通状況)を推定する。したがって、センター側システム301は正確な交通状況を外部(各車両)に送信することができる。よって、推定される走行可能速度の信頼性、ひいてはプローブ情報システムの信頼性を高めることができる。
【0120】
また、上記のようにプローブ車両151がオートクルーズの設定速度で走行中か否かの判断を車両側システム100側で行う場合において、車両側システム100は、道路の勾配情報やカーブ情報を含む地図情報に基づいて、プローブ車両がオートクルーズの設定速度で走行中か否かを判断している。したがって、外部(各車両)にて、走行可能速度を適切に用いることができる。また、車両側システム100は、プローブ車両151がオートクルーズの設定速度で走行中であると判断すると、当該プローブ車両151のID(プローブ車両ID)あるいは車両側システム100のID(車両側システムID)をセンター側システム301に送信する。したがって、センター側システム301は、プローブ車両151が過去にオートクルーズ機能付きの車両であると判断されたか否かを確認することができ、推定される走行可能速度の信頼性を高めることができる。
【0121】
また、本実施の形態では、プローブ情報端末210と車両制御部101とは制御系情報系インタフェースで接続されていないものとして説明したが、プローブ情報端末201と車両制御部101とを制御系情報系インタフェースで通信可能に接続してもよい。この場合、プローブ情報端末201は、車両制御部101のオートクルーズ設定部111にて設定されたオートクルーズ設定情報などオートクルーズに関する情報を制御系情報系インタフェースを介して取得し、取得したオートクルーズに関する情報をオートクルーズ関連情報としてセンター側システム301に送信する。したがって、センター側システム301では、プローブ車両151がオートクルーズの設定速度で走行中か否かの判断を行う処理を省略することができる。
【0122】
また、プローブ情報端末201と車両制御部101とが制御系情報系インタフェースで接続されている場合において、車両制御部101は、プローブ車両151の周辺の交通情報を検出する周辺検出部(図示せず)を車内LAN114と接続するように設けてもよい。例えば、周辺検出部が、プローブ車両151が走行している車線(道路)の隣車線の車両や後方車両の有無を検出し、それらの検出結果を制御系情報系インタフェースで取得したプローブ情報端末201がセンター側システム301に送信する。このようにすることによって、センター側システム301にて推定される交通状況の信頼性を高めることができる。
【0123】
また、プローブ情報端末201と車両制御部101とが制御系情報系インタフェースで接続されている場合において、プローブ情報端末201は、制御系情報系インタフェースを介して車両制御部101からプローブ車両151に関する種々の情報(エンジン回転速度、ブレーキ情報、ヘッドライトやワイパ動作などのボディ系情報)を取得し、取得した情報をセンター側システム301に送信するようにしてもよい。このようにすることによって、センター側システム301にて推定される交通状況の信頼性を高めることができる。
【0124】
<実施の形態2>
図9は、本発明の実施の形態2に係るセンター側システム301の構成を示すブロック図である。以下、本実施の形態に係るセンター側システム301についての説明において、実施の形態1で説明した構成要素と類似するものについては同じ符号を付して説明を省略する。
【0125】
図9に示されるように、本実施の形態に係るセンター側システム301は、実施の形態1に係るセンター側システム301に、統計DB(データベース)サーバ321を追加したものとなっている。
【0126】
この統計DBサーバ321は、交通状況推定部318で推定された走行可能速度を記憶する。本実施の形態では、統計DBサーバ321は、交通状況推定部318で推定された過去の走行可能速度を複数記憶しているとともに、それら走行可能速度に統計処理を行うことによって生成され、実質的には過去の走行可能速度である統計データVm1も記憶している。
【0127】
図10は、本実施の形態に係る交通状況推定部318が用いる規定ルールの一例を示す図である。この図10に示されるように、交通状況推定部318は、センター側受信部326で車両送信情報が受信されなかった道路についての走行可能速度を、統計DBサーバ321に記憶されている統計データVm1(実質的には過去の走行可能速度)とする。
【0128】
ここで統計データVm1と推定された統計データVm1の信頼度は、制限速度と推定された走行可能速度の信頼度よりも高いと考えられる。そこで、本実施の形態では、交通状況推定部318は、統計データVm1と推定された走行可能速度の信頼度を、制限速度と推定された走行可能速度の信頼度(図5では「1」)よりも高い信頼度(図10では「2」)に推定する。
【0129】
以上のような本実施の形態に係るセンター側システム301によれば、車両送信情報(プローブ車両位置情報、プローブ車両速度情報)が得られなかった道路についての走行可能速度を、過去の走行可能速度と推定する。したがって、外部(各車両)に適切な経路を探索する可能性を高めることができる。
【0130】
なお、統計データVm1が、時間帯、曜日、天候などの項目ごとに生成される場合には、交通状況推定部318は、推定する時点で該当する項目の統計データVm1を選択し、車両送信情報が得られなかった道路の走行可能速度を、当該選択した統計データVm1と推定するものであってもよい。この場合には、外部(各車両)にて適切な経路を探索する可能性をさらに高めることができる。また、統計データVm1は、一定距離または一定時間の過去の走行可能速度に基づいて生成してもよい。この場合には、異常な瞬時値の影響を抑制することができる。
【0131】
また、VICS情報の対象となっている主要道路については信頼度が高いことから、統計DBサーバ321は、主要道路については走行可能速度を記憶しなくてもよい。このように構成すれば、センター側システム301での記憶容量の利用効率を高めることができる。
【0132】
<実施の形態3>
図11は、本発明の実施の形態3に係るプローブ情報システムの構成を示すブロック図である。以下、本実施の携帯に係るプローブ情報システムについての説明において、車両制御部101は実施の形態1で説明した構成要素と同様であるため説明を省略する。
【0133】
図11に示されるように、本実施の形態に係る車両側システム100は、実施の形態1に係るプローブ情報端末201に代えて携帯端末401(携帯情報通信端末)を備えている。なお、携帯端末401は、携帯電話やスマートフォンに代表される個人が携帯することが可能な端末を想定している。
【0134】
次に、携帯端末401の動作について説明する。
【0135】
携帯端末401は、当該携帯端末401の情報をプローブ車両151の情報としてセンター側システム301に送信(出力)する機能を実現するプローブ情報出力アプリケーションを有している。ユーザーが操作部411に対して所定の操作をしてプローブ情報出力アプリケーションを起動させると、制御部416は、位置検出部413から携帯端末401の位置に関する情報である携帯端末位置情報(携帯情報通信端末位置情報)を取得しプローブ情報出力部414に与える。
【0136】
プローブ情報出力部414は、携帯端末位置情報を通信インタフェース部415に与え、通信インタフェース部415は、プローブ情報出力部417からの情報をセンター側システム301などに送信する。
【0137】
本実施の形態では、以上で説明した通信インタフェース部415及びプローブ情報出力部414が、送信部である車両側送信部427を構成している。このように構成された車両側送信部427は、位置検出部413で検出された携帯端末位置情報を、通信ネットワーク300を介してセンター側システム301に送信する。
【0138】
次に、センター側システム301の動作について説明する。
【0139】
本実施の形態に係るセンター側システム301では、オートクルーズ走行判断部315以外の構成要素の動作については実施の形態1で説明した構成要素の動作と同様であるため説明を省略する。
【0140】
オートクルーズ走行判断部315は、センター側受信部326で受信した携帯端末位置情報と、地図DB314に記憶されている地図情報とに基づいて、携帯端末401がプローブ車両151内に存在するか否かを判断し、携帯端末401がプローブ車両151内に存在すると判断すると、携帯端末位置情報と地図情報とに基づいて、プローブ車両151がオートクルーズの設定速度で走行中か否かを判断する。なお、プローブ車両151がオートクルーズの設定速度で走行中か否かの判断は、実施の形態1と同様であるため説明を省略する。
【0141】
オートクルーズ判断部315は、プローブ車両151がオートクルーズの設定速度で走行中か否かの判断を行う際、以下の条件(A)〜(D)に基づいて判断を行っている。
【0142】
(A)携帯端末401の移動速度がプローブ車両151の走行速度以内であるか否か
(B)携帯端末401の移動速度が歩行または自転車の速度以上であるか否か
(C)携帯端末401が鉄道などの公共交通機関の運行路線上を移動しているか否か
(D)携帯端末401が道路上を移動しているか否か
【0143】
以上のような本実施の形態に係るプローブ情報システムによれば、センター側システム301は、携帯端末401から取得した携帯端末位置情報と、地図DB314に記憶されている地図情報とに基づいて、まず携帯端末401がプローブ車両151内に存在するか否かを判断した後、携帯端末401がプローブ車両151内に存在する場合に当該プローブ車両151がオートクルーズの設定速度で走行中か否かを判断する。したがって、プローブ車両151からオートクルーズに関する情報を直接取得することができない携帯端末401を車両側システム100に備えたとしても、センター側システム301は正確な交通状況を外部(各車両)に送信することができる。よって、推定される走行可能速度の信頼性、ひいてはプローブ情報システムの信頼性を高めることができる。
【0144】
なお、本実施の形態において、携帯端末401は、当該携帯端末401のIDである携帯端末ID(携帯情報通信端末ID)をセンター側システム301に送信するようにしてもよい。この場合、センター側システム301は、プローブ車両151がオートクルーズの設定速度で走行中であると判断すると、携帯端末401の携帯端末IDを記憶する。したがって、センター側システム301は、プローブ車両151が過去にオートクルーズ機能付きの車両であると判断したか否かを確認することができ、推定される走行可能速度の信頼性を高めることができる。
【0145】
また、本実施の形態において、プローブ情報出力アプリケーションは、携帯端末401がプローブ車両151内に存在するか否かを示す情報を外部に送信する機能を有し、携帯端末401は当該携帯端末401がプローブ車両151内に存在するか否かを示す情報をセンター側システム301に送信するようにしてもよい。このようにすることによって、センター側システム301は、携帯端末401がプローブ車両151内に存在するか否かの判断処理を省略することができる。
【0146】
また、本実施の形態では、携帯端末401と車両制御部101とは制御系情報系インタフェースで接続されていないものとして説明したが、携帯端末401と車両制御部101とを制御系情報系インタフェースで通信可能に接続してもよい。この場合、携帯端末401は、車両制御部101のオートクルーズ設定部111にて設定されたオートクルーズ設定情報を制御系情報系インタフェースを介して取得し、取得したオートクルーズ設定情報をオートクルーズ関連情報としてセンター側システム301に送信する。つまり、携帯端末401(情報端末)は、プローブ車両151からセンター側システム301に情報をアップロードすべく、プローブ情報システムに適用可能であって、プローブ車両のオートクルーズに関する情報であるオートクルーズ関連情報をセンター側システム301に送信する機能を有しており、プローブ車両151との通信により取得した当該プローブ車両151のオートクルーズ設定情報をオートクルーズ関連情報としてセンター側システム301に送信する。したがって、センター側システム301では、プローブ車両151がオートクルーズの設定速度で走行中か否かの判断を行う処理を省略することができる。
【0147】
また、携帯端末401と車両制御部101とが制御系情報系インタフェースで接続されている場合において、携帯端末401は、自分自身で検出した携帯端末401の位置に関する情報である携帯端末位置情報またはこれに加えて携帯端末401の速度に関する情報である携帯端末速度情報をセンター側システム301に送信するか、または、プローブ車両151との通信により取得した当該プローブ車両の位置に関する情報であるプローブ車両位置情報またはこれに加えてプローブ車両151の速度に関する情報であるプローブ車両速度情報をセンター側システム301に送信してもよい。このようにすることによって、センター側システム301で推定される走行可能速度の信頼性を高めることができる。
【0148】
また、携帯端末401と車両制御部101とが制御系情報系インタフェースで接続されている場合において、携帯端末401は、制御系情報系インタフェースを介して車両制御部101からプローブ車両151に関する種々の情報(エンジン回転速度、ブレーキ情報、ヘッドライトやワイパ動作などのボディ系情報)を取得し、取得した情報をセンター側システム301に送信するようにしてもよい。このようにすることによって、センター側システム301にて推定される交通状況の信頼性を高めることができる。
【0149】
また、携帯端末401は、車両に搭載されていない場合は、センター側システム301に情報をアップロードしないようにしてもよい。
【0150】
また、上記実施例では、プローブ車両がオートクルーズ走行中か否かを車両側もしくはセンター側で判断したが、オートクルーズ情報だけではなく車格や車種を推定してセンター側に送信してもよい。車格および車種は、走行中の車体のピッチやヨーレートや、エンジン音等から推定する。一般的には、車格が大きいほどピッチが小さい。
【0151】
本発明はその発明の範囲内において、各実施の形態の自由な組み合せ、あるいは各実施の形態の任意の構成要素の変形、もしくは各実施の形態において任意の構成要素の省略が可能である。
【符号の説明】
【0152】
100 車両側システム、101 車両制御部、111 オートクルーズ設定部、112 オートクルーズ制御部、113 走行系・ボディ系制御部、114 車内LAN、201 プローブ情報端末、211 操作部、212 表示/報知部、213 位置検出部、214 車載地図DB、215 通信インタフェース部、216 交通状況入力部、217 プローブ情報出力部、227 車両側送信部、301 センター側システム、311 通信インタフェース部、312 プローブ情報入力部、313 プローブDBサーバ、314 地図DB、315 オートクルーズ走行判断部、316 インフラ情報入力部、317 インフラDBサーバ、318 交通状況推定部、319 交通状況DBサーバ、320 交通状況提供部、321 統計DBサーバ、326 センター側受信部、327 センター側送信部、401 携帯端末、411 操作部、412 表示/報知部、413 位置検出部、414 プローブ情報出力部、415 通信インタフェース部、416 制御部。
【技術分野】
【0001】
本発明は、プローブ情報システムにおけるセンター側システム及び情報端末に関するものである。
【背景技術】
【0002】
現在、自身が走行している道路の交通情報を取得しアップロードするプローブ車両と、プローブ車両がアップロードした交通情報に基づいて渋滞情報を含む交通状況を各車両に送信(配信)するセンター側システム(例えば交通状況提供システム)とを備えるプローブ情報システムが提案されている。この技術によれば、センター側システムからの交通状況を受信した各車両は、渋滞情報に基づいて適切な経路を探索することができ、その結果、より短い時間で目的地などに到着することが可能となる。なお、現在、プローブ車両は、カーメーカのテレマティクスサービス対応車両、バスやタクシーなどの一部の車両しか適用されていないが、今後、一般的な車両にも適用されていくものと予測されている。
【0003】
さて、以上のようなプローブ情報システムにおいて、プローブ車両で取得された情報(プローブデータ)が、不正確または不適切である場合には、探索した経路を走行した方が、他の経路を走行したときよりも、目的地などに到達するまでの時間がかかってしまうことがあり、結果として、各車両は適切な経路を走行することができなくなることがある。
【0004】
そこで、このような問題を解決するために様々な技術が提案されている。例えば、特許文献1には、異常な停車などの異常動作を示すプローブデータを使用しないようにして、プローブデータを適正化する技術が開示されている。また、それに付随する技術も様々に提案されており、車両の速度を自動的に設定速度にするオートクルーズ機能をプローブ車両に追加し、設定速度で走行中に取得される情報(オートクルーズに関する情報)をプローブ情報として利用する方法が提案されている。例えば、特許文献2には、種々のセンサーを用いて検出されたオートクルーズに関する情報を含めた交通状態に関するデータを各プローブ車両から収集し、当該収集したデータと交通状態に関する現在のデータとを比較し、当該比較の結果得られた両状態間の変化を各プローブ車両がサーバから受信して情報を更新する技術が開示されている。また、特許文献3には、プローブ車両が設定速度で走行していない場合に、走行している道路が渋滞していると判断する技術が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2009−9298号公報
【特許文献2】特開2000−222693号公報
【特許文献3】特開2010−204726号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1〜3に記載の技術によれば、道路が渋滞しているか否かを各車両に送信することはできるが、渋滞道路をどれぐらいの速度で走行できるかをセンター側システムから各車両に送信するものではない。したがって、渋滞の程度によっては、渋滞道路を走行したときの方が目的地に短時間で到達できることがあり、結果として各車両は適切な経路を走行できないことがある。
【0007】
また、仮にプローブ車両の速度を各車両に配信するようにしたとしても、プローブ車両が、当該プローブ車両に固有の原因により、空いた道路を低速で走行している場合には、当該道路は空いているにもかかわらずプローブ車両の速度と同じ低速でしか走行できないと判断してしまう。したがって、この場合には、上述と同様、結果として適切な経路を走行できないことがある。
【0008】
また、特許文献2,3に記載の技術では、オートクルーズに関する情報をオートクルーズ機能を備えたプローブ車両から直接取得して外部に送信することが前提となっており、オートクルーズに関する情報をプローブ車両から直接取得することができないプローブ情報端末を備えるプローブ情報システムでは、オートクルーズに関する情報をプローブ情報端末から外部に送信することができなかった。特に、車両に後付されるナビゲーションシステム、PND(Portable Navigation Device)、スマートフォンのような持込型のプローブ情報端末を備えるプローブ情報システムにおいて顕著な問題であった。
【0009】
そこで、本発明は、上記のような問題点を鑑みてなされたものであり、プローブ車両からオートクルーズに関する情報を直接取得することができないプローブ情報端末を備えるプローブ情報システムの信頼性を高めることが可能な技術を提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明に係るセンター側システムは、プローブ車両に搭載された車両側システムから交通情報のアップロードを受ける、プローブ情報システムにおけるセンター側システムであって、少なくとも前記プローブ車両の位置に関する情報であるプローブ車両位置情報を前記車両側システムから受信する受信部と、道路情報を含む地図情報を格納している地図データベースと、前記受信部で受信した前記プローブ車両位置情報と、前記地図データベースに格納されている前記地図情報とに基づいて、前記プローブ車両がオートクルーズで走行中か否かを判断するオートクルーズ走行判断部と、前記オートクルーズ走行判断部で判断された結果と、前記地図データベースに格納されている前記地図情報とに基づいて、車両の走行可能速度を含む交通状況を推定する交通状況推定部と、前記交通状況推定部で推定された前記交通状況を外部に送信する送信部、または前記交通状況を外部からのアクセスによって閲覧可能とする閲覧手段とを備える。
【0011】
また、本発明に係る情報端末は、プローブ車両に備えられ、センター側システムに交通情報をアップロードする、プローブ情報システムに用いられる情報端末であって、前記プローブ車両のオートクルーズに関する情報であるオートクルーズ関連情報を前記センター側システムに送信する。
【発明の効果】
【0012】
本発明によれば、プローブ車両のプローブ車両位置情報と、地図データベースに格納されている地図情報とに基づいて走行可能速度を含む交通状況を推定する。したがって、推定される走行可能速度の信頼性、ひいてはプローブ情報システムの信頼性を高めることができる。
【図面の簡単な説明】
【0013】
【図1】実施の形態1に係るプローブ情報システムの構成を示すブロック図である。
【図2】実施の形態1に係るセンター側システムの処理を示すフローチャートである。
【図3】実施の形態1に係るセンター側システムの動作を示す図である。
【図4】実施の形態1に係るセンター側システムの処理を示すフローチャートである。
【図5】実施の形態1に係るセンター側システムの動作を示す図である。
【図6】実施の形態1に係るセンター側システムの動作を示す図である。
【図7】実施の形態1に係るセンター側システムの動作を示す図である。
【図8】実施の形態1に係るセンター側システムの動作を示す図である。
【図9】実施の形態2に係るセンター側システムの構成を示すブロック図である。
【図10】実施の形態2に係るセンター側システムの動作を示す図である。
【図11】実施の形態3に係るプローブ情報システムの構成を示すブロック図である。
【図12】関連プローブ情報システムの動作を示す図である。
【発明を実施するための形態】
【0014】
本発明の実施の形態について、図面に基づいて以下に説明する。
【0015】
<実施の形態1>
まず、本発明の実施の形態1に係るプローブ情報システムについて説明する前に、これらに関連するプローブ情報システム(以下「関連プローブ情報システム」と記す)を、図12を用いて説明する。
【0016】
関連プローブ情報システムは、プローブ車両151(プローブ車両151a,151b)に搭載された車両側システム100と、交通状況提供システムなどのセンター側システム301(この図12においては図示しない)とを備えている。車両側システム100は、プローブ車両151の走行道路の交通情報をセンター側システム301にアップロードし、センター側システム301は、車両側システム100から交通情報のアップロードを受け、当該交通情報に基づいて交通状況を外部(各車両)に送信する。
【0017】
この図12において、プローブ車両151は、現在地Sと目的地Gとの間に位置しており、現在地Sから目的地Gまでの間には、ノードn1〜n9で交差する道路R1〜R4が存在している。
【0018】
道路R1〜R4のうち図12において太線で示される道路R1,R2は、VICS(登録商標)(Vehicle Information and Communication System)情報の配信対象となっている主要道路であり、ここでは、法令で定められた最大速度(以下「制限速度」)がそれぞれ60km/hであるものとする。センター側システム301は、VICS情報を受信することにより、道路R1,R2などの主要道路での走行可能速度及び渋滞情報などを取得可能となっている。なお、走行可能速度とは、対象とする道路における一般的な車両の現交通状況下で走行可能と推定される最大速度を意味するものとする。
【0019】
一方、道路R3,R4は、VICS情報の配信対象ではない主要でない道路であり、ここでは、制限速度がそれぞれ50km/hであるものとする。センター側システム301は、道路R3,R4の走行可能速度についてはVICS情報から取得できないが、プローブ車両151の車両側システム100からアップロードされた交通情報を受けることによって取得可能となっている。具体的には、センター側システム301は、プローブ車両151aの車両側システム100が送信した交通情報に含まれる速度を取得し、当該速度を道路R3での走行可能速度としている。同様に、センター側システム301は、プローブ車両151bの車両側システム100が送信した交通情報に含まれる速度を取得し、当該速度を道路R4での走行可能速度としている。
【0020】
ここで、図12において、距離(n1−n2−n3−n4−n5)=距離(n1−n2−n9−n4−n5)=50kmであるものとする。なお、距離(n1−n2−n3−n4−n5)は、ノードn1,n2,n3,n4,n5を一通り通る経路での最短距離を意味し、距離(n1−n2−n9−n4−n5)は、ノードn1,n2,n9,n4,n5を順に通る経路での距離を意味する。以下同様に記載して、距離(n1−n2)=距離(n1−n6)=距離(n4−n5)=距離(S−n1)=距離(n5−G)=10kmとし、距離(n2−n9−n4)=30kmとし、距離(n1−n6−n7−n8−n5)=60kmとする。また、道路Rnの走行可能速度についてはVcnと記載する(ここではn=1〜4)。
【0021】
以上を前提にして、以下、現在地(出発地)S近傍に位置する車両が、センター側システム301から走行可能速度Vcnを受信した場合に、現在地Sから目的地Gまでの経路を探索する一般的な処理について説明する。
【0022】
一般的な周知の経路探索ロジックによれば、現在地Sから目的地Gまでの経路探索は、現在地Sから目的地Gまでの各経路のリンクコスト(通行コスト)が計算され、コストが最も小さい経路が第1候補(最適経路)として提示される。一般に、リンクのコストは、リンクコスト=(リンクの距離/走行可能速度)×α(係数)により計算される。この場合に、図12に示す経路AのコストAは、S−n1−n2−n3−n4−n5−Gのリンクコストの総和となることから、(70/Vc2)×αとなる。同様に、経路BのコストBは、S−n1−n2−n9−n4−n5−Gのリンクコストの総和となることから、(40/Vc2+30/Vc3)×αとなる。同様に、経路CのコストCは、S−n1−n6−n7−n8−n5−Gのリンクコストの総和となることから、(20/Vc2+60/Vc4)×αとなる。なお、以下においては、説明を簡単化するためにα=1とする。
【0023】
コストA〜Cは、以上の式から分かるように、センター側システム301から与えられる走行可能速度Vc2〜Vc4によって決定される。この走行可能速度Vc2〜Vc4の組み合わせは様々であるが、以下においては、3つのケースについて説明する。
【0024】
まず、道路R1〜R4のいずれにおいても渋滞がない場合(ケース1)について説明する。この場合、走行可能速度Vc2,Vc3,Vc4は、それぞれ制限速度と同じ60km/h,50km/h,50km/hとすることができ、上述のコストA,B,Cは、それぞれ(70/60)=35/30,(40/60+30/50)=38/30,(20/60+60/50)=46/30となる。すなわち、この場合には、コストA<コストB<コストCとなることから、最適経路として、図12において三角印が複数付された経路Aが選択される。
【0025】
次に、道路R2の走行可能速度が渋滞の発生により40km/hとなっていることを示すVICS情報がセンター側システム301に受信され、その他の道路R1,R3,R4においては渋滞がない場合(ケース2)について説明する。この場合、走行可能速度Vc2が変更されて、走行可能速度Vc2,Vc3,Vc4は、それぞれ40km/h,50km/h,50km/hとなり、上述のコストA,B,Cは、それぞれ(70/40)=35/20,(40/40+30/50)=32/20,(20/40+60/50)=34/20となる。すなわち、この場合には、コストB<コストC<コストAとなることから、最適経路として、図12において四角印が複数付された経路Bが選択される。
【0026】
次に、センター側システム301が、ケース2と同じVICS情報を受信し、かつ、道路R3の車両側システム100から40km/hの速度を受信し、道路R4の車両側システム100から50km/hの速度を受信した場合(ケース3)について説明する。この場合、走行可能速度Vc2〜Vc4が変更されて、走行可能速度Vc2,Vc3,Vc4は、それぞれ40km/h,40km/h,50km/hとなり、上述のコストA,B,Cは、それぞれ(70/40)=35/20,(40/40+30/40)=35/20,(20/40+60/50)=34/20となる。すなわち、この場合には、コストC<コストA=コストBとなることから、最適経路として、図12において丸印が複数付された経路Cが選択される。
【0027】
さて、上述のケース3においては、プローブ車両151aは、道路R3の制限速度(50km/h)以下の速度(40km/h)で走行していた。ここで、道路R3での渋滞などが原因で、プローブ車両151aが、制限速度より遅い速度でしか走行できなかったのであれば、経路Cが最適経路として選択されることは適切である。しかしながら、道路R3が空いているにもかかわらず、プローブ車両151aがそれに固有の原因により、空いた道路を制限速度よりも遅い速度で走行している場合には、プローブ車両151aの後方車両はプローブ車両151aを追い抜くことができると考えられる。
【0028】
つまり、この場合には、プローブ車両151aの後方車両はプローブ車両151aの速度以上の速度(ここでは制限速度)で走行することが可能であることから、道路R3が制限速度で走行されていたケース2と同様に、経路Bが最適経路として選択されるべきである。そうであるにもかかわらず、経路Cが最適経路として選択されることは、車両のユーザーに適切でない経路を走行させることとなり、余分な時間及び燃料を使用させることとなる。また、CO2を増加させることになることから、エコロジーの観点からも社会的な損失を伴うことになる。
【0029】
また、従来では、オートクルーズに関する情報をオートクルーズ機能を備えたプローブ車両から直接取得して外部に送信することが前提となっており、オートクルーズに関する情報をプローブ車両から直接取得することができないプローブ情報端末を備えるプローブ情報システムでは、オートクルーズに関する情報をプローブ情報端末から外部に送信することができなかった。したがって、センター側システムは、正確な交通情報を車両側システムから受信することができず、正確な交通状況を外部(各車両)に送信することができなかった。
【0030】
そこで、本実施の形態に係るプローブ情報システムによれば、プローブ車両からオートクルーズに関する情報を直接取得することができないプローブ情報端末を車両側システムに備えたとしても、センター側システムは正確な交通状況を外部(各車両)に送信することができ、プローブ情報システムの信頼性を高めることが可能となっている。以下、このようなプローブ情報システムについて説明する。
【0031】
図1は、本実施の形態1に係るプローブ情報システムの構成を示すブロック図である。なお、図1においては、以上で説明した構成要素と類似するものについては同じ符号を付している。この図1に示すように、このプローブ情報システムは、上述の関連プローブ情報システムと同様、プローブ車両151の交通情報をセンター側システム301にアップロードする車両側システム100と、車両側システム100から当該交通情報のアップロードを受けるセンター側システム301とを備えている。また、車両側システム100は、車両制御部101と、プローブ情報端末201とを備えている。なお、車両制御部101(車両制御系)とプローブ情報端末201(情報系)とは、両者間で情報通信及び制御を行うために制御系情報系インタフェース(例えば、LAN)が設置されるが、本実施の形態では制御系情報系インタフェースは設置されていないものとする。これは、通常、工場出荷後の市販の後付装着するカーナビゲーション装置やPNDには制御系情報系インタフェースが設置されておらず、本実施の形態に係るプローブ情報端末は当該カーナビゲーション装置やPNDを想定しているためである。また、ここでのアップロードは、通信ネットワーク300を介して行われるものとする。
【0032】
プローブ情報端末201は、ユーザーからの操作を受け付ける操作部211と、様々な情報を表示/報知する表示/報知部212と、位置検出部213と、車載地図DB(データベース)214と、通信インタフェース部215と、交通状況入力部216と、プローブ情報出力部217と、操作部211で受け付けた操作などに基づいて各構成要素を統括的に制御するCPUなどからなる制御部218とを備えている。
【0033】
車両制御部101は、オートクルーズ設定部111と、オートクルーズ制御部112と、走行系・ボディ系制御部113とを備えている。また、オートクルーズ設定部111、オートクルーズ制御部112、及び、走行系・ボディ系制御部113は、車内LAN114を介して接続されている。
【0034】
なお、車両制御部101の車内LAN114と、プローブ情報端末201の制御部218とは、制御系情報系インタフェースで接続されていないため、制御部218は、車内LAN114及び制御系情報系インタフェースを介して、オートクルーズ制御部112及び走行系・ボディ系制御部113から各種情報を受け取ることができない。
【0035】
次に、車両制御部101の各構成要素について説明する。
【0036】
走行系・ボディ系制御部113は、走行系制御部及びボディ系制御部から構成されている。走行系制御部は、プローブ車両151の走行を制御する装置群から構成されており、例えば、エンジン回転数、ブレーキ系装置などを制御してプローブ車両151の速度を制御したり、シャフトの姿勢などを制御してプローブ車両151の進行方向を制御したりする。また、走行系制御部は、車輪の回転速度に応じた車速パルスに基づいてプローブ車両151の速度を検出する。ボディ系制御部は、プローブ車両151での走行に直接関わらない動作を制御する装置群から構成されており、例えば、ワイパーの駆動、灯火情報の伝達、ウィンカーの点灯、ドアの開閉、窓の開閉などを制御する。なお、走行系・ボディ系制御部113は、図示しない制御部によって制御されており、また、オートクルーズ制御部112によっても制御される。
【0037】
オートクルーズ制御部112は、オートクルーズ機能(クルーズコントロール機能)により、プローブ車両151の走行を制御する。本実施の形態では、オートクルーズ設定部111においてオートクルーズ機能がオンに設定され、かつ、所定速度が設定されている場合に、オートクルーズ制御部112は、プローブ車両151の走行速度が、当該設定された設定速度と等しくなるように、走行系・ボディ系制御部113のエンジン回転数、ブレーキ系装置の制御などを制御する。
【0038】
なお、オートクルーズ機能の種類の一つとして、先行車両などを検出し、自車と当該先行車両との間隔を自動的に一定距離に保つ間隔保持機能がオートクルーズ機能に付加されたアダバンスオートクルーズ機能と呼ばれるものがある。以下の説明においては、オートクルーズ機能は、特に言及しない限り、間隔保持機能が付加されていないオートクルーズ機能を意味するものとする。
【0039】
オートクルーズ設定部111では、上述のオートクルーズ機能の設定が行われる。本実施の形態では、一般的な方向指示器と同様に、設定バー(図示せず)がハンドル近傍に設けられている。そして、設定バーにおいて所定操作が行われた場合には、オートクルーズ設定部111においてオートクルーズ機能がオンに設定され、ブレーキ操作が行われた場合には、オートクルーズ設定部111においてオートクルーズ機能がオフに設定される。また、設定バーのグリップを回すなどの所定操作が行われた場合には、オートクルーズ設定部111において、設定速度が変更されたり、オートクルーズ機能がオフに設定されたりする。
【0040】
次に、プローブ情報端末201の各構成要素について説明する。
【0041】
位置検出部213は、GPS(Global Positioning System)装置、ヨーレートセンサー及び加速度センサーなどから構成され、プローブ車両151の位置に関する情報であるプローブ車両位置情報を検出する。ここでは、位置検出部213は、経度緯度などの絶対座標上でのプローブ車両151のプローブ車両位置情報として自車位置情報Pk=(xk,yk)を検出するものとする。
【0042】
車載地図DB214には、絶対座標やリンク番号が付加された地図データと、目的地に設定可能な施設に関する情報(例えば、施設の固有名称及び一般名称、地図上での施設の座標位置などの情報)とを含む地図情報が記憶されている。本実施の形態に係るプローブ情報端末201は、この車載地図DB214の情報を利用することにより、目的地までの走行経路を探索したり、その走行経路に沿って車両のユーザーを目的地まで誘導したりするナビゲーション機能を有している。
【0043】
通信インタフェース部215は、通信ネットワーク300を介してセンター側システム301などと通信する。交通状況入力部216は、通信インタフェース部215が受信した情報を制御部218に与える。プローブ情報出力部217は、プローブ車両151内の情報を通信インタフェース部215に与え、通信インタフェース部215は、プローブ情報出力部217からの情報をセンター側システム301などに送信する。
【0044】
本実施の形態では、以上で説明した通信インタフェース部215及びプローブ情報出力部217が、送信部である車両側送信部227を構成している。このように構成された車両側送信部227は、位置検出部213で検出されたプローブ車両位置情報を、通信ネットワーク300を介してセンター側システム301に所定の時間ごとに送信する。なお、車両側システム100が送信するプローブ車両位置情報は、以下「車両送信情報」と記すこともある。なお、本実施の形態では、この車両送信情報は、車両側システム100がアップロードする交通情報と一致している。
【0045】
また、プローブ情報端末201は、プローブ車両151を特定するID(プローブ車両ID)や、プローブ情報端末201を特定するID(プローブ情報端末ID)を、車両送信情報とともにセンター側システム301に送信している。
【0046】
次に、センター側システム301の構成について説明する。
【0047】
図1に示すように、センター側システム301は、通信インタフェース部311と、プローブ情報入力部312と、プローブDBサーバ313と、地図DB314と、オートクルーズ走行判断部315と、インフラ情報入力部316と、インフラDBサーバ317と、交通状況推定部318と、交通状況DBサーバ319と、交通状況提供部320とを備えている。なお、本実施の形態では、交通状況推定部318は、センター側システム301を統括的に制御している。
【0048】
次に、センター側システム301の各構成要素について説明する。
【0049】
通信インタフェース部311は、通信ネットワーク300を介して、プローブ車両151の車両側システム100、他のプローブ情報システム及びVICSセンター(いずれも図示せず)などと通信する。ここでは、通信インタフェース部311は、通信ネットワーク300を介して、車両側システム100から送信された車両送信情報を受信する。なお、車両送信情報は、プローブ車両151から直接的に受信した車両送信情報であってもよいし、他のプローブ情報システムを介して間接的に受信した車両送信情報であってもよい。
【0050】
プローブ情報入力部312は、通信インタフェース部311で受信した車両送信情報を、プローブDBサーバ313に与える。
【0051】
プローブDBサーバ313は、プローブ情報入力部312からの車両送信情報を、道路及び時間をパラメータとして、道路及び時間ごとに記憶する。
【0052】
地図DB314は、道路の勾配情報・カーブ情報などの道路情報を含む地図情報を記憶する。
【0053】
オートクルーズ走行判断部315は、プローブDBサーバ313に記憶されている車両送信情報と、地図DB314に記憶されている地図情報とに基づいて、車両送信情報の送信元であるプローブ車両151がオートクルーズの設定速度で走行中か否かを判断し、オートクルーズの設定速度で走行中であると判断した場合は、当該プローブ車両151をオートクルーズの設定速度で走行中の車両であると判断する。
【0054】
インフラ情報入力部316は、通信インタフェース部311で受信されたVICS情報やインフラ情報を、インフラDBサーバ317に与える。
【0055】
VICS情報は、VICSセンターからの情報であり、例えば、主要道路における走行可能速度や、渋滞情報を含んでいる。インフラ情報は、VICSセンターや他のプローブ情報システムからの情報であり、例えば、現在の日時や道路ごとの天候を示す情報を含んでいる。なお、インフラ情報の各種情報の供給元は適宜変更されてもよく、例えば、現在の日時はセンター側システム301において供給(計測)されてもよいし、天候を示す情報は車両から供給(送信)されてもよい。
【0056】
インフラDBサーバ317は、インフラ情報入力部316からのVICS情報及びインフラ情報を、例えばプローブDBサーバ313と同様に道路及び時間をパラメータとして記憶する。
【0057】
本実施の形態では、上述した通信インタフェース部311及びプローブ情報入力部312が、受信部であるセンター側受信部326を構成している。このように構成されたセンター側受信部326は、車両送信情報、つまりプローブ車両151のプローブ車両位置情報や、プローブ車両151のプローブ車両速度情報を、プローブ車両151の車両側システム100から受信する。
【0058】
交通状況推定部318は、オートクルーズ走行判断部315で推定された結果と、地図DB314に記憶されている地図情報とに基づいて、上述の走行可能速度を含む交通状況を推定する。つまり、交通状況推定部318は、オートクルーズ走行判断部315で推定された結果と、地図DB314に記憶されている地図情報とに基づいて、各道路における車両の走行可能速度を含む交通状況を推定する。また、本実施の形態では、交通状況推定部318は、走行可能速度を推定するだけでなく、センター側受信部326で受信したプローブ車両位置情報と地図DB314に記憶されている地図情報とに基づいて、当該走行可能速度の信頼度を推定し、当該信頼度を上述の交通状況に含める。また、交通状況推定部318は、車両送信情報やインフラ情報などに基づいて渋滞情報も推定し、当該渋滞情報を上述の交通状況に含める。なお、交通状況推定部318での、走行可能速度及び信頼度の推定については後で詳細に説明する。
【0059】
交通状況DBサーバ319は、交通状況推定部318が求めた走行可能速度、信頼度、渋滞情報などを含む交通状況(以下「配信交通状況」と呼ぶこともある)を道路ごとに記憶する。また、交通状況DBサーバ319は、オートクルーズ走行判断部315においてオートクルーズの設定速度で走行中であると判断されたプローブ車両151はオートクルーズ機能付きの車両であるとして、当該プローブ車両151のプローブ車両IDを記憶する。
【0060】
交通状況提供部320は、交通状況DBサーバ319に記憶された配信交通状況を通信インタフェース部311に与え、通信インタフェース部311は、当該配信交通状況を、プローブ車両151の車両側システム100や、他のプローブ情報システムなどの外部に送信(発信)する。
【0061】
本実施の形態では、以上で説明した通信インタフェース部311及び交通状況提供部320が、送信部であるセンター側送信部327を構成している。このように構成されたセンター側送信部327は、交通状況推定部318で推定された配信交通状況をプローブ車両151の車両側システム100などの外部に送信する。本実施の形態では、配信交通状況が道路ごとに交通状況DBサーバ319に記憶されていることから、センター側送信部327は、道路ごとの配信交通状況を送信することが可能となっている。なお、このセンター側送信部327の代わりに、例えばインターネットブラウザのように、上記配信交通状況を外部からのアクセスによって閲覧可能とする閲覧手段を備える構成であってもよい。
【0062】
次に、本実施の形態の特徴であるオートクルーズ走行判断部315の処理について説明する。図2は、オートクルーズ走行判断部315の処理を示すフローチャートである。
【0063】
ステップS21にて、オートクルーズ走行判断部315には、プローブDBサーバ313からプローブ車両位置情報を含む車両送信情報が時系列で入力される。
【0064】
ステップS22にて、オートクルーズ走行判断部315には、地図DB314からプローブ車両151が走行した道路データである地図情報が入力される。
【0065】
ステップS23にて、プローブDBサーバ313から入力された車両送信情報と、地図DB314から入力された地図情報とに基づいて、プローブ車両151がオートクルーズの設定速度で走行中であることを検出したか否か(つまり、プローブ車両151がオートクルーズの設定速度で走行中であるか否か)を判断する。
【0066】
ここで、プローブ車両151がオートクルーズの設定速度で走行中であるか否かの判断について説明する。オートクルーズの設定速度で走行中であるか否かは、以下の3つのロジック(ロジック1〜3)に基づいて判断する。
【0067】
まず、ロジック1について説明する。
【0068】
図3は、勾配のある道路を走行する車両の速度について示した図である。図3(a)は、道路の距離Lと高さH(L)との関係を示しており、L1のときの高さはH(L1)であり、L2のときの高さはH(L2)であり、L3のときの高さはH(L3)である。図3(a)に示すように、L1−L2区間の道路は下りの勾配であり、L2−L3区間の道路は上りの勾配である。また、図3(b),(c)は車両の走行時間と速度との関係を示しており、t1〜t6は図3(a)のL1〜L3を通過する時間を示している。つまり、t1,t4はL1を通過する時間を示し、t2,t5はL2を通過する時間を示し、t3,t6はL3を通過する時間を示している。また、図3(b)は、図3(a)に示す道路を車速V1(t)で通常走行する場合を示しており、図3(c)は、図3(a)に示す道路を車速V2(t)でオートクルーズ機能がオンの状態で走行する場合を示している。
【0069】
図3(b)に示すように、車速V1(t)で通常走行する車両は、L1−L2区間で車速が徐々に速くなり(車速がV1(t1)からV1(t2)となり)、L2(高さが最も低いH(L2))で最高の車速V1(t2)となる。そして、L2−L3区間で車速が徐々に遅くなる(車速がV1(t2)からV1(t3)となる)。
【0070】
一方、図3(c)に示すように、車速V2(t)でオートクルーズオン状態で走行する車両は、L1−L3区間で、車速V2(t)=V2(t4)=V2(t5)=V2(t6)で走行する。つまり、オートクルーズの設定速度で走行する車両は、道路の勾配の有無に関わらず一定の速度で走行する。
【0071】
このように、ロジック1では、道路の勾配の有無に関わらず一定の速度で走行する車両をオートクルーズの設定速度で走行していると判断する。
【0072】
次に、ロジック2について説明する。
【0073】
通常走行において、長時間(例えば、20分以上)、速度を一定にして走行することは困難である。したがって、ロジック2では、長時間一定の速度で走行している車両をオートクルーズの設定速度で走行していると判断する。
【0074】
最後に、ロジック3について説明する。
【0075】
通常、走行中にカーブに差し掛かると、速度を落としてカーブ区間を走行する。一方、オートクルーズの設定速度で走行している場合は、カーブ区間を一定の速度で走行する場合がある。したがって、ロジック3では、カーブ区間を一定の速度で走行している車両をオートクルーズの設定速度で走行していると判断する。
【0076】
上記のロジック1〜3に基づいて、1つまたは複数組合せて重み付けを付与した所定の計算式によってオートクルーズ確定度gを算出し、算出したオートクルーズ確定度gにより車両がオートクルーズの設定速度で走行中であるか否かの判断を行う。
【0077】
オートクルーズ確定度gは、例えば以下の式(1)により求められる。
【0078】
g=f1×K1+f2×K2+f3×K3 ・・・(1)
ここで、f1,f2,f3の各々は、車両の走行状況がロジック1〜3の各々に該当する程度を示す該当度を示している。また、K1,K2,K3の各々は、ロジック1〜3の各々に対する重み付けを示している。
【0079】
例えば、オートクルーズ確定度gを上記の式(1)で算出する場合において、
f1=1.5(30分以内にロジック1に該当する状況を3回以上検出した)
f1=1 (30分以内にロジック1に該当する状況を2回検出した)
f1=0.5(30分以内にロジック1に該当する状況を1回検出した)
f1=0 (上記以外)
また、
f2=2 (30分以上に亘ってロジック2に該当する状況を検出した)
f2=1 (20分以上に亘ってロジック2に該当する状況を検出した)
f2=0 (上記以外)
また、
f3=1 (30分以内にロジック3に該当する状況を2回以上検出した)
f3=0.5(30分以内にロジック3に該当する状況を1回検出した)
f3=0 (上記以外)
ここで、K1=1.0、K2=1.5、K3=0.5とし、オートクルーズ確定度g≧2.5の場合は、車両がオートクルーズの設定速度で走行中であると判断する。ただし、上記の判断ロジックは一例であり、この式にこだわるものではない。
【0080】
図2に戻って、以上で説明したステップS23でプローブ車両151がオートクルーズの設定速度で走行中であると判断された場合は、ステップS24にて、当該プローブ車両151はオートクルーズ機能付きの車両であるとして、当該プローブ車両151のID(プローブ車両ID)を交通状況DBサーバ319に記憶する。そして、ステップS25にて、上記プローブ車両151は現在の速度をオートクルーズの設定速度で走行中であると判断する。
【0081】
一方、ステップS23でプローブ車両151がオートクルーズの設定速度で走行中でないと判断された場合は、ステップS26にて、プローブ車両151が過去にオートクルーズ機能付きの車両であると判断した否かを判断する。プローブ車両151が過去にオートクルーズ機能付きの車両であると判断したか否かは、過去にステップS24にてプローブ車両151のIDが交通状況DBサーバ319に記憶されたか否かで判断することができる。
【0082】
ステップS26にてプローブ車両151が過去にオートクルーズ機能付きの車両であると判断された場合は、ステップS27にて、オートクルーズ機能付きのプローブ車両151がオートクルーズ機能がオフの状態で走行中であると判断する。
【0083】
一方、ステップS26にてプローブ車両151が過去にオートクルーズ機能付きの車両でないと判断された場合は、ステップS28にて、オートクルーズ機能付きでないプローブ車両151が現在の速度で走行中であると判断する。
【0084】
次に、図4を用いてセンター側システム301の処理について説明する。
【0085】
ステップS41にて、インフラ情報入力部316は、通信インタフェース部311で受信されたVICS情報などをインフラDBサーバ317に与え、インフラDBサーバ317は当該VICS情報などを記憶(セーブ)する。ステップS42にて、交通状況推定部318は、オートクルーズ走行判断部315から、オートクルーズ走行判断部315での判断結果と、車両送信情報とを取得する。
【0086】
ステップS43にて、交通状況推定部318は、例えばセンター側システム301に予め記憶された規定ルールに従い、ステップS41で記憶されたVICS情報、及び、ステップS42で取得した車両送信情報及びオートクルーズ走行判断部315での判断結果に基づいて、走行可能速度及び信頼度等を含む交通状況を推定する。
【0087】
図5は、当該規定ルールの一例を示す図である。この図5に示される規定ルールでは、交通状況推定部318が取得した情報の種別を示す取得情報と、交通状況推定部318が推定結果とすべき走行可能速度(推定速度)及び信頼度とが対応付けられている。信頼度は、ここでは「1〜5」までの1つの数字で表され、数字が大きくなるにつれて信頼度が高くなるものとする。
【0088】
次に、交通状況推定部318が、図5に示される規定ルールに従い、走行可能速度及び信頼度を推定する処理について説明する。
【0089】
まず、対象の道路が主要道路であり、当該道路についてVICS情報が得られた場合には、交通状況推定部318は、当該道路の走行可能速度を、VICS情報が示す速度V1と推定し、当該推定した走行可能速度の信頼度を「5」に推定する。
【0090】
対象の道路が主要道路でない場合には、交通状況推定部318は、ステップS42にて取得した判断結果及び車両送信情報に基づいて以下のように走行可能速度及び信頼度を求める。なお、以下の説明においては、オートクルーズ機能のオン/オフの設定は、オートクルーズ走行判断部315にて判断された結果に基づくものとする。
【0091】
オートクルーズ設定情報がオフの設定を示す場合には、図6に示されるように、プローブ車両151が先行車両の影響を受けている可能性が高く、当該プローブ車両151の後方車両も、プローブ車両151の速度V2までしか速度を上げることができないと考えられる。そこで、この場合には、交通状況推定部318は、プローブ車両151が走行している道路の走行可能速度を、車両送信情報のプローブ車両位置情報に基づいて算出されたプローブ車両151の速度V2と推定する。
【0092】
ただし、プローブ車両151の速度V2が、法定の制限速度を超えて走行している場合には、法令遵守の観点から、走行可能速度をプローブ車両151の速度V2と推定すべきではない。そこで、本実施の形態に係る交通状況推定部318は、ここでの走行可能速度を、上記のプローブ車両151の速度V2、及び、制限速度の小さい方と推定する。図5に示されるMin(V2,制限速度)は、このことを意味している。なお、走行可能速度を推定するのに用いられる制限速度は、例えば、車両送信情報のプローブ車両位置情報に基づいて、プローブ車両位置情報(道路)と制限速度とが予め対応付けられた地図DB314から取得される。
【0093】
また、この場合に、交通状況推定部318は、推定した走行可能速度の信頼度を例えば「3」に推定する。
【0094】
一方、オートクルーズ設定情報がオンの設定を示す場合には、図7に示されるように、プローブ車両151の前に先行車両が存在しない可能性が高く、当該プローブ車両151の後方車両は、プローブ車両151の速度V3以上で走行できると考えられる。そこで、この場合には、交通状況推定部318は、プローブ車両151が走行している道路の走行可能速度を、車両送信情報のプローブ車両位置情報に基づいて算出されたプローブ車両151の速度V3以上であり、かつ、制限速度以下の値となるf(V3,制限速度)と推定する。
【0095】
ここで、f(V3,制限速度)は、速度V3及び制限速度の関数である。このf(V3,制限速度)は、速度V3以上であり、かつ、制限速度以下の値をとるのであれば、どのような関数であってもよく、例えば、f(V3,制限速度)=制限速度としてもよいし、f(V3,制限速度)={(制限速度)+V3}/2としてもよい。以下においては、説明を簡単にするため、f(V3,制限速度)=制限速度として説明する。
【0096】
また、この場合に、交通状況推定部318は、推定した走行可能速度の信頼度を例えば「2」に推定する。
【0097】
以上の処理だけでなく、本実施の形態に係る交通状況推定部318は、オートクルーズ機能を有さないプローブ車両から速度V4を取得した場合には、当該プローブ車両に係る道路の走行可能速度を、当該速度V4、及び、制限速度のうちの小さい方と推定する。そして、この場合に、交通状況推定部318は、当該推定した走行可能速度の信頼度を例えば「3」に推定する。また、交通状況推定部318は、対象の道路に対して何もプローブ車両速度情報が得られなかった場合(プローブ情報無しの場合)には、当該道路の走行可能速度を当該道路の制限速度と推定し、当該推定した走行可能速度の信頼度を例えば「1」に推定する。
【0098】
図8は、図4のステップS43での交通状況推定部318の処理の例を説明するための図である。この図には、図12で説明した、VICS情報の対象となる主要道路R1,R2と、VICS情報の対象でない主要でない道路R3,R4とが示されている。また、図12の説明と同様に、道路R1,R2の制限速度はそれぞれ60km/hであり、道路R3,R4の制限速度はそれぞれ50km/hとする。そして、プローブ車両151aは道路R3を走行し、プローブ車両151bは道路R4を走行しているものとする。
【0099】
以上において、センター側システム301が、道路R2の走行可能速度として40km/hを示すVICS情報を受信した場合には、交通状況推定部318は、道路R2の走行可能速度Vc2を40km/hと推定する。なお、この走行可能速度の信頼度は「5」であるため、プローブ車両151から異なる速度の走行可能速度を受信した場合であっても、センター側システム301は、道路R2の走行可能速度Vc2を40km/hと推定する。
【0100】
プローブ車両151aにおいてオートクルーズ機能がオフに設定されている場合に、センター側システム301が、プローブ車両151aの車両側システム100から40km/hを示すプローブ車両速度情報(車両送信情報)を受信した場合には、交通状況推定部318は、道路R3の走行可能速度Vc3を、プローブ車両151aの速度(40km/h)と推定する。一方、プローブ車両151aにおいてオートクルーズ機能がオンに設定されている場合に、センター側システム301が、プローブ車両151aの車両側システム100から50km/hを示すプローブ車両速度情報(車両送信情報)を受信した場合には、交通状況推定部318は、道路R3の走行可能速度Vc3を、プローブ車両151aの速度以上の速度(ここでは制限速度と同じ50km/h)と推定する。
【0101】
なお、プローブ車両151bの車両側システム100における動作は、プローブ車両151aの車両側システム100における動作と同様であるため、具体的な説明は省略する。ここでは、プローブ車両151bの車両側システム100の動作の結果として、プローブ車両151bが走行している道路R4の走行可能速度Vc4が、50km/hと推定されたものとする。
【0102】
以上のような車両側システム100及びセンター側システム301によれば、道路R3が渋滞しており、プローブ車両151aがオートクルーズ機能をオフした状態で低速(40km/h)で走行している場合には、道路R3の走行可能速度Vc3は、プローブ車両151aと同じ速度(40km/h)であると推定される。したがって、この場合には、走行可能速度Vc2〜Vc4は、図12で説明したケース3と同じ走行可能速度となることから、現在地S近傍に位置する各車両においては、ケース3と同様に経路Cが最適経路として選択されることになる。
【0103】
一方、道路R3が空いているにもかかわらず、プローブ車両151aがオートクルーズ機能をオンした状態で低速(40km/h)で走行している場合には、道路R3の走行可能速度Vc3は、プローブ車両151aの速度以上(ここでは制限速度と同じ50km/h)であると推定される。したがって、この場合には、走行可能速度Vc2〜Vc4は、図12で説明したケース2と同じ走行可能速度となることから、現在地S近傍に位置する各車両においてはケース2と同様に経路Bが最適経路として選択されることになる。
【0104】
以上のように、本実施の形態に係る車両側システム100及びセンター側システム301によれば、各車両において、車両送信情報に基づく適切な経路を走行することが可能となる。
【0105】
図4に戻って、以上で説明したステップS43にて、交通状況推定部318は、求めた走行可能速度及び信頼度を含む配信交通状況を道路ごとに交通状況DBサーバ319に記憶(セーブ)する。
【0106】
ステップS44にて、センター側システム301から配信交通状況を取得したい車両や他のプローブ情報システムが、センター側システム301にアクセスする。センター側システム301が当該アクセスを受けると、センター側送信部327は、交通状況DBサーバ319で記憶された配信交通状況を外部に送信(発信)する。この際、センター側送信部327は、アクセス元が望む配信交通状況を当該アクセス元だけが受信することができるように、ID情報を配信交通状況に付加して送信(発信)する。
【0107】
ステップS45にて、処理が終了したかを判断する。処理が終了したと判断した場合には図4に示す処理を終了し、そうでない場合にはステップS41に戻る。本実施の形態では、センター側システム301は、処理が終了したと判断するまで、ステップS41〜S45の処理を行う。
【0108】
以上のような本実施の形態に係るプローブ情報システムによれば、センター側システム301は、少なくとも車両側システム100から取得したプローブ車両位置情報と、地図DB314に記憶されている地図情報とに基づいて走行可能速度(交通状況)を推定する。したがって、プローブ車両151からオートクルーズに関する情報を直接取得することができないプローブ情報端末201を車両側システム100に備えたとしても、センター側システム301は正確な交通状況を外部(各車両)に送信することができる。よって、推定される走行可能速度の信頼性、ひいてはプローブ情報システムの信頼性を高めることができる。
【0109】
また、本実施の形態では、センター側システム301は、プローブ車両位置情報と地図情報とに基づいて、走行可能速度の信頼度(交通状況)も推定する。したがって、外部(各車両)にて、走行可能速度を適切に用いることができる。
【0110】
また、本実施の形態では、センター側システム301は、道路の勾配情報やカーブ情報を含む地図情報に基づいて、プローブ車両がオートクルーズの設定速度で走行中か否かを判断している。したがって、外部(各車両)にて、走行可能速度を適切に用いることができる。
【0111】
また、本実施の形態では、センター側システム301は、プローブ車両151がオートクルーズの設定速度で走行中であると判断すると、当該プローブ車両151のID(プローブ車両ID)を記憶する。したがって、センター側システム301は、プローブ車両151が過去にオートクルーズ機能付きの車両であると判断したか否かを確認することができ、推定される走行可能速度の信頼性を高めることができる。
【0112】
また、本実施の形態では、センター側システム301は、プローブ車両151がオートクルーズの設定速度で走行中であると判断すると、走行可能速度は当該プローブ車両151の速度以上であると推定し、また、プローブ車両151がオートクルーズの設定速度で走行中でないと判断すると、走行可能速度は当該プローブ車両151の速度であると推定する。したがって、推定される走行可能速度の信頼性を高めることができる。
【0113】
なお、以上の説明では、センター側システム301は、車両側システム100から受信したプローブ車両位置情報に基づいてプローブ車両151の速度を算出しているが、プローブ車両151の速度に関する情報であるプローブ車両速度情報を車両送信情報として車両側システム100から受信してもよい。センター側システム301は、プローブ車両速度情報を受信することによって、プローブ車両位置情報に基づくプローブ車両の速度の算出処理を省略することができる。車両側システム100がプローブ車両速度情報をセンター側システム301に送信する場合において、プローブ情報端末201の制御部218は、プローブ車両151に備えられた車速センサーに接続され、当該車速センサーから車速パルスを取得し、取得した車速パルスに基づいてプローブ車両151の速度(プローブ車両速度情報)を算出する。そして、制御部218で算出されたプローブ車両速度情報は、プローブ車両位置情報とともに車両送信情報として車両側送信部227からセンター側システム301に送信される。
【0114】
また、以上の説明では、図2のステップS24において、センター側システム301は、プローブ車両151がオートクルーズの設定速度で走行中であると判断すると、当該プローブ車両151のプローブ車両IDを交通状況データベースサーバに記憶するようにしたが、これに限ったものではない。例えば、プローブ車両151に搭載された車両側システム100のID(車両側システムID)や、プローブ情報端末201のIDであってもよい。
【0115】
また、以上の説明では、センター側システム301と、VICSセンターとは個別のセンターであるとしたが、これに限ったものではない。例えば、センター側システム301そのものが、VICSセンターであってもよい。
【0116】
また、以上の説明では、図4ステップS44において、センター側システム301が配信先を特定して配信交通状況を送信したが、この配信交通状況の送信は、これに限ったものではない。例えば、センター側送信部327は、各道路に対応付けた配信交通状況を一定時間ごとにブロードキャストで送信(発信)し、車両側システム100が、必要な走行可能情報を自身で判断して取得するものであってもよい。
【0117】
また、以上で説明した構成において、センター側システム301は、プローブ車両151が蛇行運転など通常走行の範囲外で走行していると判断した場合に、当該プローブ車両151の車両送信情報に基づいて推定される走行可能速度の信頼度を低くしたり、当該車両送信情報そのものを採用しないようにしたりしてもよい。なお、通常走行の範囲外か否かの検出は、例えば、地図上でのプローブ車両151の位置の推移などに基づいて行えばよい。
【0118】
また、以上の説明では、位置検出部213は、経度緯度などの絶対座標上でのプローブ車両151のプローブ車両位置情報として自車位置情報Pk=(xk,yk)を検出するものとした。しかし、これに限ったものではなく、例えば、位置検出部213は、プローブ車両151の位置に対応する道路のリンク番号を検出し、当該リンク番号が自車位置情報Pkの代わりに用いられてもよい。
【0119】
また、以上の説明では、プローブ車両151がオートクルーズの設定速度で走行中か否かの判断はセンター側システム301で行うようにしているが、当該判断を車両側システム100側で行うようにしてもよい。つまり、プローブ車両151からセンター側システム301に情報(交通情報)をアップロードすべく、プローブ情報システムに適用可能なプローブ情報端末201(情報端末)が、プローブ車両151のオートクルーズに関する情報であるオートクルーズ関連情報をセンター側システム301に送信するようにしてもよい。プローブ情報端末201は車両側システム100に備えられており、プローブ車両位置情報を取得する位置検出部(取得部)と、地図情報を記憶(格納)している地図DB(データベース)と、位置検出部で取得したプローブ車両位置情報と、地図DBに記憶されている地図情報とに基づいて、プローブ車両151がオートクルーズの設定速度で走行中か否かを判断するオートクルーズ走行判断部と、オートクルーズ走行判断部で判断された結果をオートクルーズ関連情報としてセンター側システム301に送信する送信部とを備えている。なお、地図DB及びオートクルーズ走行判断部は、上述のセンター側システム301が備える地図DB314及びオートクルーズ走行判断部315にそれぞれ対応している。センター側システム301は、車両側システム100から受信したオートクルーズ関連情報に基づいて走行可能速度(交通状況)を推定する。したがって、センター側システム301は正確な交通状況を外部(各車両)に送信することができる。よって、推定される走行可能速度の信頼性、ひいてはプローブ情報システムの信頼性を高めることができる。
【0120】
また、上記のようにプローブ車両151がオートクルーズの設定速度で走行中か否かの判断を車両側システム100側で行う場合において、車両側システム100は、道路の勾配情報やカーブ情報を含む地図情報に基づいて、プローブ車両がオートクルーズの設定速度で走行中か否かを判断している。したがって、外部(各車両)にて、走行可能速度を適切に用いることができる。また、車両側システム100は、プローブ車両151がオートクルーズの設定速度で走行中であると判断すると、当該プローブ車両151のID(プローブ車両ID)あるいは車両側システム100のID(車両側システムID)をセンター側システム301に送信する。したがって、センター側システム301は、プローブ車両151が過去にオートクルーズ機能付きの車両であると判断されたか否かを確認することができ、推定される走行可能速度の信頼性を高めることができる。
【0121】
また、本実施の形態では、プローブ情報端末210と車両制御部101とは制御系情報系インタフェースで接続されていないものとして説明したが、プローブ情報端末201と車両制御部101とを制御系情報系インタフェースで通信可能に接続してもよい。この場合、プローブ情報端末201は、車両制御部101のオートクルーズ設定部111にて設定されたオートクルーズ設定情報などオートクルーズに関する情報を制御系情報系インタフェースを介して取得し、取得したオートクルーズに関する情報をオートクルーズ関連情報としてセンター側システム301に送信する。したがって、センター側システム301では、プローブ車両151がオートクルーズの設定速度で走行中か否かの判断を行う処理を省略することができる。
【0122】
また、プローブ情報端末201と車両制御部101とが制御系情報系インタフェースで接続されている場合において、車両制御部101は、プローブ車両151の周辺の交通情報を検出する周辺検出部(図示せず)を車内LAN114と接続するように設けてもよい。例えば、周辺検出部が、プローブ車両151が走行している車線(道路)の隣車線の車両や後方車両の有無を検出し、それらの検出結果を制御系情報系インタフェースで取得したプローブ情報端末201がセンター側システム301に送信する。このようにすることによって、センター側システム301にて推定される交通状況の信頼性を高めることができる。
【0123】
また、プローブ情報端末201と車両制御部101とが制御系情報系インタフェースで接続されている場合において、プローブ情報端末201は、制御系情報系インタフェースを介して車両制御部101からプローブ車両151に関する種々の情報(エンジン回転速度、ブレーキ情報、ヘッドライトやワイパ動作などのボディ系情報)を取得し、取得した情報をセンター側システム301に送信するようにしてもよい。このようにすることによって、センター側システム301にて推定される交通状況の信頼性を高めることができる。
【0124】
<実施の形態2>
図9は、本発明の実施の形態2に係るセンター側システム301の構成を示すブロック図である。以下、本実施の形態に係るセンター側システム301についての説明において、実施の形態1で説明した構成要素と類似するものについては同じ符号を付して説明を省略する。
【0125】
図9に示されるように、本実施の形態に係るセンター側システム301は、実施の形態1に係るセンター側システム301に、統計DB(データベース)サーバ321を追加したものとなっている。
【0126】
この統計DBサーバ321は、交通状況推定部318で推定された走行可能速度を記憶する。本実施の形態では、統計DBサーバ321は、交通状況推定部318で推定された過去の走行可能速度を複数記憶しているとともに、それら走行可能速度に統計処理を行うことによって生成され、実質的には過去の走行可能速度である統計データVm1も記憶している。
【0127】
図10は、本実施の形態に係る交通状況推定部318が用いる規定ルールの一例を示す図である。この図10に示されるように、交通状況推定部318は、センター側受信部326で車両送信情報が受信されなかった道路についての走行可能速度を、統計DBサーバ321に記憶されている統計データVm1(実質的には過去の走行可能速度)とする。
【0128】
ここで統計データVm1と推定された統計データVm1の信頼度は、制限速度と推定された走行可能速度の信頼度よりも高いと考えられる。そこで、本実施の形態では、交通状況推定部318は、統計データVm1と推定された走行可能速度の信頼度を、制限速度と推定された走行可能速度の信頼度(図5では「1」)よりも高い信頼度(図10では「2」)に推定する。
【0129】
以上のような本実施の形態に係るセンター側システム301によれば、車両送信情報(プローブ車両位置情報、プローブ車両速度情報)が得られなかった道路についての走行可能速度を、過去の走行可能速度と推定する。したがって、外部(各車両)に適切な経路を探索する可能性を高めることができる。
【0130】
なお、統計データVm1が、時間帯、曜日、天候などの項目ごとに生成される場合には、交通状況推定部318は、推定する時点で該当する項目の統計データVm1を選択し、車両送信情報が得られなかった道路の走行可能速度を、当該選択した統計データVm1と推定するものであってもよい。この場合には、外部(各車両)にて適切な経路を探索する可能性をさらに高めることができる。また、統計データVm1は、一定距離または一定時間の過去の走行可能速度に基づいて生成してもよい。この場合には、異常な瞬時値の影響を抑制することができる。
【0131】
また、VICS情報の対象となっている主要道路については信頼度が高いことから、統計DBサーバ321は、主要道路については走行可能速度を記憶しなくてもよい。このように構成すれば、センター側システム301での記憶容量の利用効率を高めることができる。
【0132】
<実施の形態3>
図11は、本発明の実施の形態3に係るプローブ情報システムの構成を示すブロック図である。以下、本実施の携帯に係るプローブ情報システムについての説明において、車両制御部101は実施の形態1で説明した構成要素と同様であるため説明を省略する。
【0133】
図11に示されるように、本実施の形態に係る車両側システム100は、実施の形態1に係るプローブ情報端末201に代えて携帯端末401(携帯情報通信端末)を備えている。なお、携帯端末401は、携帯電話やスマートフォンに代表される個人が携帯することが可能な端末を想定している。
【0134】
次に、携帯端末401の動作について説明する。
【0135】
携帯端末401は、当該携帯端末401の情報をプローブ車両151の情報としてセンター側システム301に送信(出力)する機能を実現するプローブ情報出力アプリケーションを有している。ユーザーが操作部411に対して所定の操作をしてプローブ情報出力アプリケーションを起動させると、制御部416は、位置検出部413から携帯端末401の位置に関する情報である携帯端末位置情報(携帯情報通信端末位置情報)を取得しプローブ情報出力部414に与える。
【0136】
プローブ情報出力部414は、携帯端末位置情報を通信インタフェース部415に与え、通信インタフェース部415は、プローブ情報出力部417からの情報をセンター側システム301などに送信する。
【0137】
本実施の形態では、以上で説明した通信インタフェース部415及びプローブ情報出力部414が、送信部である車両側送信部427を構成している。このように構成された車両側送信部427は、位置検出部413で検出された携帯端末位置情報を、通信ネットワーク300を介してセンター側システム301に送信する。
【0138】
次に、センター側システム301の動作について説明する。
【0139】
本実施の形態に係るセンター側システム301では、オートクルーズ走行判断部315以外の構成要素の動作については実施の形態1で説明した構成要素の動作と同様であるため説明を省略する。
【0140】
オートクルーズ走行判断部315は、センター側受信部326で受信した携帯端末位置情報と、地図DB314に記憶されている地図情報とに基づいて、携帯端末401がプローブ車両151内に存在するか否かを判断し、携帯端末401がプローブ車両151内に存在すると判断すると、携帯端末位置情報と地図情報とに基づいて、プローブ車両151がオートクルーズの設定速度で走行中か否かを判断する。なお、プローブ車両151がオートクルーズの設定速度で走行中か否かの判断は、実施の形態1と同様であるため説明を省略する。
【0141】
オートクルーズ判断部315は、プローブ車両151がオートクルーズの設定速度で走行中か否かの判断を行う際、以下の条件(A)〜(D)に基づいて判断を行っている。
【0142】
(A)携帯端末401の移動速度がプローブ車両151の走行速度以内であるか否か
(B)携帯端末401の移動速度が歩行または自転車の速度以上であるか否か
(C)携帯端末401が鉄道などの公共交通機関の運行路線上を移動しているか否か
(D)携帯端末401が道路上を移動しているか否か
【0143】
以上のような本実施の形態に係るプローブ情報システムによれば、センター側システム301は、携帯端末401から取得した携帯端末位置情報と、地図DB314に記憶されている地図情報とに基づいて、まず携帯端末401がプローブ車両151内に存在するか否かを判断した後、携帯端末401がプローブ車両151内に存在する場合に当該プローブ車両151がオートクルーズの設定速度で走行中か否かを判断する。したがって、プローブ車両151からオートクルーズに関する情報を直接取得することができない携帯端末401を車両側システム100に備えたとしても、センター側システム301は正確な交通状況を外部(各車両)に送信することができる。よって、推定される走行可能速度の信頼性、ひいてはプローブ情報システムの信頼性を高めることができる。
【0144】
なお、本実施の形態において、携帯端末401は、当該携帯端末401のIDである携帯端末ID(携帯情報通信端末ID)をセンター側システム301に送信するようにしてもよい。この場合、センター側システム301は、プローブ車両151がオートクルーズの設定速度で走行中であると判断すると、携帯端末401の携帯端末IDを記憶する。したがって、センター側システム301は、プローブ車両151が過去にオートクルーズ機能付きの車両であると判断したか否かを確認することができ、推定される走行可能速度の信頼性を高めることができる。
【0145】
また、本実施の形態において、プローブ情報出力アプリケーションは、携帯端末401がプローブ車両151内に存在するか否かを示す情報を外部に送信する機能を有し、携帯端末401は当該携帯端末401がプローブ車両151内に存在するか否かを示す情報をセンター側システム301に送信するようにしてもよい。このようにすることによって、センター側システム301は、携帯端末401がプローブ車両151内に存在するか否かの判断処理を省略することができる。
【0146】
また、本実施の形態では、携帯端末401と車両制御部101とは制御系情報系インタフェースで接続されていないものとして説明したが、携帯端末401と車両制御部101とを制御系情報系インタフェースで通信可能に接続してもよい。この場合、携帯端末401は、車両制御部101のオートクルーズ設定部111にて設定されたオートクルーズ設定情報を制御系情報系インタフェースを介して取得し、取得したオートクルーズ設定情報をオートクルーズ関連情報としてセンター側システム301に送信する。つまり、携帯端末401(情報端末)は、プローブ車両151からセンター側システム301に情報をアップロードすべく、プローブ情報システムに適用可能であって、プローブ車両のオートクルーズに関する情報であるオートクルーズ関連情報をセンター側システム301に送信する機能を有しており、プローブ車両151との通信により取得した当該プローブ車両151のオートクルーズ設定情報をオートクルーズ関連情報としてセンター側システム301に送信する。したがって、センター側システム301では、プローブ車両151がオートクルーズの設定速度で走行中か否かの判断を行う処理を省略することができる。
【0147】
また、携帯端末401と車両制御部101とが制御系情報系インタフェースで接続されている場合において、携帯端末401は、自分自身で検出した携帯端末401の位置に関する情報である携帯端末位置情報またはこれに加えて携帯端末401の速度に関する情報である携帯端末速度情報をセンター側システム301に送信するか、または、プローブ車両151との通信により取得した当該プローブ車両の位置に関する情報であるプローブ車両位置情報またはこれに加えてプローブ車両151の速度に関する情報であるプローブ車両速度情報をセンター側システム301に送信してもよい。このようにすることによって、センター側システム301で推定される走行可能速度の信頼性を高めることができる。
【0148】
また、携帯端末401と車両制御部101とが制御系情報系インタフェースで接続されている場合において、携帯端末401は、制御系情報系インタフェースを介して車両制御部101からプローブ車両151に関する種々の情報(エンジン回転速度、ブレーキ情報、ヘッドライトやワイパ動作などのボディ系情報)を取得し、取得した情報をセンター側システム301に送信するようにしてもよい。このようにすることによって、センター側システム301にて推定される交通状況の信頼性を高めることができる。
【0149】
また、携帯端末401は、車両に搭載されていない場合は、センター側システム301に情報をアップロードしないようにしてもよい。
【0150】
また、上記実施例では、プローブ車両がオートクルーズ走行中か否かを車両側もしくはセンター側で判断したが、オートクルーズ情報だけではなく車格や車種を推定してセンター側に送信してもよい。車格および車種は、走行中の車体のピッチやヨーレートや、エンジン音等から推定する。一般的には、車格が大きいほどピッチが小さい。
【0151】
本発明はその発明の範囲内において、各実施の形態の自由な組み合せ、あるいは各実施の形態の任意の構成要素の変形、もしくは各実施の形態において任意の構成要素の省略が可能である。
【符号の説明】
【0152】
100 車両側システム、101 車両制御部、111 オートクルーズ設定部、112 オートクルーズ制御部、113 走行系・ボディ系制御部、114 車内LAN、201 プローブ情報端末、211 操作部、212 表示/報知部、213 位置検出部、214 車載地図DB、215 通信インタフェース部、216 交通状況入力部、217 プローブ情報出力部、227 車両側送信部、301 センター側システム、311 通信インタフェース部、312 プローブ情報入力部、313 プローブDBサーバ、314 地図DB、315 オートクルーズ走行判断部、316 インフラ情報入力部、317 インフラDBサーバ、318 交通状況推定部、319 交通状況DBサーバ、320 交通状況提供部、321 統計DBサーバ、326 センター側受信部、327 センター側送信部、401 携帯端末、411 操作部、412 表示/報知部、413 位置検出部、414 プローブ情報出力部、415 通信インタフェース部、416 制御部。
【特許請求の範囲】
【請求項1】
プローブ車両に搭載された車両側システムから交通情報のアップロードを受ける、プローブ情報システムにおけるセンター側システムであって、
少なくとも前記プローブ車両の位置に関する情報であるプローブ車両位置情報を前記車両側システムから受信する受信部と、
道路情報を含む地図情報を格納している地図データベースと、
前記受信部で受信した前記プローブ車両位置情報と、前記地図データベースに格納されている前記地図情報とに基づいて、前記プローブ車両がオートクルーズで走行中か否かを判断するオートクルーズ走行判断部と、
前記オートクルーズ走行判断部で判断された結果と、前記地図データベースに格納されている前記地図情報とに基づいて、車両の走行可能速度を含む交通状況を推定する交通状況推定部と、
前記交通状況推定部で推定された前記交通状況を外部に送信する送信部、または前記交通状況を外部からのアクセスによって閲覧可能とする閲覧手段と、
を備える、センター側システム。
【請求項2】
携帯情報通信端末から交通情報のアップロードを受ける、プローブ情報システムにおけるセンター側システムであって、
携帯情報通信端末の位置に関する情報である携帯情報通信端末位置情報を前記携帯情報通信端末から受信する受信部と、
道路情報を含む地図情報を格納している地図データベースと、
前記受信部で受信した前記携帯情報通信端末位置情報と、前記地図データベースに格納されている前記地図情報とに基づいて、前記携帯情報通信端末が前記プローブ車両内に存在するか否かを判断し、前記携帯情報通信端末が前記プローブ車両内に存在すると判断すると、前記携帯情報通信端末位置情報と前記地図情報とに基づいて、前記プローブ車両がオートクルーズで走行中か否かを判断するオートクルーズ走行判断部と、
前記オートクルーズ走行判断部で判断された結果と、前記地図データベースに格納されている前記地図情報とに基づいて、車両の走行可能速度を含む交通状況を推定する交通状況推定部と、
前記交通状況推定部で推定された前記交通状況を外部に送信する送信部、または前記交通状況を外部からのアクセスによって閲覧可能とする閲覧手段と、
を備える、センター側システム。
【請求項3】
前記交通状況推定部は、前記受信部で受信した前記プローブ車両位置情報あるいは前記携帯情報通信端末位置情報と前記地図情報とに基づいて、前記走行可能速度の信頼度を推定し、当該信頼度を前記交通状況に含める、請求項1または2に記載のセンター側システム。
【請求項4】
前記交通状況推定部で推定された前記走行可能速度を記憶する統計データベースサーバをさらに備え、
前記交通状況推定部は、前記受信部で前記プローブ車両位置情報あるいは前記携帯情報通信端末位置情報が受信されなかった道路についての走行可能速度を、前記統計データベースサーバに記憶された過去の前記走行可能速度とする、請求項1ないし3のいずれか1項に記載のセンター側システム。
【請求項5】
前記地図データベースは、前記地図情報に道路の勾配情報を含み、
前記オートクルーズ走行判断部は、前記勾配情報に基づいて、前記プローブ車両が道路の勾配のある区間を一定の速度で走行中の場合はオートクルーズで走行中であると判断する、請求項1ないし4のいずれか1項に記載のセンター側システム。
【請求項6】
前記地図データベースは、前記地図情報に道路のカーブ情報を含み、
前記オートクルーズ走行判断部は、前記カーブ情報に基づいて、前記プローブ車両が道路のカーブ区間を一定の速度で走行中の場合はオートクルーズで走行中であると判断する、請求項1ないし4のいずれか1項に記載のセンター側システム。
【請求項7】
前記交通状況推定部で推定した前記交通状況を記憶する交通状況データベースサーバをさらに備え、
前記受信部は、前記プローブ車両位置情報とともに、前記プローブ車両のプローブ車両IDあるいは当該プローブ車両に搭載された前記車両側システムの車両側システムIDを受信し、
前記交通状況データベースサーバは、前記オートクルーズ走行判断部で前記プローブ車両がオートクルーズで走行中であると判断されると、前記プローブ車両IDあるいは前記車両側システムIDを記憶する、請求項1、3ないし6のいずれか1項に記載のセンター側システム。
【請求項8】
前記交通状況推定部で推定した前記交通状況を記憶する交通状況データベースサーバをさらに備え、
前記受信部は、前記プローブ車両位置情報とともに、前記携帯情報通信端末の携帯情報通信端末IDを受信し、
前記交通状況データベースサーバは、前記オートクルーズ走行判断部で前記プローブ車両がオートクルーズで走行中であると判断されると、前記携帯情報通信端末IDを記憶する、請求項2ないし6のいずれか1項に記載のセンター側システム。
【請求項9】
プローブ車両に搭載され、前記プローブ車両に関する情報をセンター側システムにアップロードする情報端末であって、
前記プローブ車両の位置に関する情報であるプローブ車両位置情報を取得する取得部と、
道路情報を含む地図情報を格納している地図データベースと、
前記取得部で取得した前記プローブ車両位置情報と、前記地図データベースに格納されている前記地図情報とに基づいて、前記プローブ車両がオートクルーズで走行中か否かを判断するオートクルーズ走行判断部と、
前記オートクルーズ走行判断部で判断された結果を前記オートクルーズ関連情報として前記センター側システムに送信する送信部と、
を備える、情報端末。
【請求項10】
前記地図データベースは、前記地図情報に道路の勾配情報を含み、
前記オートクルーズ走行判断部は、前記勾配情報に基づいて、前記プローブ車両が道路の勾配のある区間を一定の速度で走行中の場合はオートクルーズで走行中であると判断する、請求項9に記載の情報端末。
【請求項11】
前記地図データベースは、前記地図情報に道路のカーブ情報を含み、
前記オートクルーズ走行判断部は、前記カーブ情報に基づいて、前記プローブ車両が道路のカーブ区間を一定の速度で走行中の場合はオートクルーズで走行中であると判断する、請求項9に記載の情報端末。
【請求項12】
前記送信部は、前記プローブ車両のプローブ車両IDあるいは前記車両側システムの車両側システムIDを前記センター側システムに送信する、請求項9ないし11のいずれか1項に記載の情報端末。
【請求項13】
前記携帯端末は、携帯情報通信端末であって、
前記プローブ車両との通信により当該プローブ車両のオートクルーズ設定情報を前記オートクルーズ関連情報として取得し、前記センター側システムに送信する、請求項12に記載の情報端末。
【請求項14】
前記情報端末は携帯情報通信端末であって、
前記携帯情報通信端末の位置に関する情報である携帯端末位置情報または前記携帯端末位置情報に加えて前記携帯情報通信端末の速度に関する情報である携帯端末速度情報を前記センター側システムに送信する、請求項13に記載の情報端末。
【請求項15】
前記プローブ車両との通信により当該プローブ車両の位置に関する情報であるプローブ車両位置情報または前記プローブ車両位置情報に加えて前記プローブ車両の速度に関する情報であるプローブ車両速度情報を取得し、前記センター側システムに送信する、請求項13に記載の情報端末。
【請求項16】
前記情報端末は、携帯情報通信端末であって、
車両に搭載されていない場合は、センター側システムに情報をアップロードしないことを特徴とする、請求項12に記載の情報端末。
【請求項1】
プローブ車両に搭載された車両側システムから交通情報のアップロードを受ける、プローブ情報システムにおけるセンター側システムであって、
少なくとも前記プローブ車両の位置に関する情報であるプローブ車両位置情報を前記車両側システムから受信する受信部と、
道路情報を含む地図情報を格納している地図データベースと、
前記受信部で受信した前記プローブ車両位置情報と、前記地図データベースに格納されている前記地図情報とに基づいて、前記プローブ車両がオートクルーズで走行中か否かを判断するオートクルーズ走行判断部と、
前記オートクルーズ走行判断部で判断された結果と、前記地図データベースに格納されている前記地図情報とに基づいて、車両の走行可能速度を含む交通状況を推定する交通状況推定部と、
前記交通状況推定部で推定された前記交通状況を外部に送信する送信部、または前記交通状況を外部からのアクセスによって閲覧可能とする閲覧手段と、
を備える、センター側システム。
【請求項2】
携帯情報通信端末から交通情報のアップロードを受ける、プローブ情報システムにおけるセンター側システムであって、
携帯情報通信端末の位置に関する情報である携帯情報通信端末位置情報を前記携帯情報通信端末から受信する受信部と、
道路情報を含む地図情報を格納している地図データベースと、
前記受信部で受信した前記携帯情報通信端末位置情報と、前記地図データベースに格納されている前記地図情報とに基づいて、前記携帯情報通信端末が前記プローブ車両内に存在するか否かを判断し、前記携帯情報通信端末が前記プローブ車両内に存在すると判断すると、前記携帯情報通信端末位置情報と前記地図情報とに基づいて、前記プローブ車両がオートクルーズで走行中か否かを判断するオートクルーズ走行判断部と、
前記オートクルーズ走行判断部で判断された結果と、前記地図データベースに格納されている前記地図情報とに基づいて、車両の走行可能速度を含む交通状況を推定する交通状況推定部と、
前記交通状況推定部で推定された前記交通状況を外部に送信する送信部、または前記交通状況を外部からのアクセスによって閲覧可能とする閲覧手段と、
を備える、センター側システム。
【請求項3】
前記交通状況推定部は、前記受信部で受信した前記プローブ車両位置情報あるいは前記携帯情報通信端末位置情報と前記地図情報とに基づいて、前記走行可能速度の信頼度を推定し、当該信頼度を前記交通状況に含める、請求項1または2に記載のセンター側システム。
【請求項4】
前記交通状況推定部で推定された前記走行可能速度を記憶する統計データベースサーバをさらに備え、
前記交通状況推定部は、前記受信部で前記プローブ車両位置情報あるいは前記携帯情報通信端末位置情報が受信されなかった道路についての走行可能速度を、前記統計データベースサーバに記憶された過去の前記走行可能速度とする、請求項1ないし3のいずれか1項に記載のセンター側システム。
【請求項5】
前記地図データベースは、前記地図情報に道路の勾配情報を含み、
前記オートクルーズ走行判断部は、前記勾配情報に基づいて、前記プローブ車両が道路の勾配のある区間を一定の速度で走行中の場合はオートクルーズで走行中であると判断する、請求項1ないし4のいずれか1項に記載のセンター側システム。
【請求項6】
前記地図データベースは、前記地図情報に道路のカーブ情報を含み、
前記オートクルーズ走行判断部は、前記カーブ情報に基づいて、前記プローブ車両が道路のカーブ区間を一定の速度で走行中の場合はオートクルーズで走行中であると判断する、請求項1ないし4のいずれか1項に記載のセンター側システム。
【請求項7】
前記交通状況推定部で推定した前記交通状況を記憶する交通状況データベースサーバをさらに備え、
前記受信部は、前記プローブ車両位置情報とともに、前記プローブ車両のプローブ車両IDあるいは当該プローブ車両に搭載された前記車両側システムの車両側システムIDを受信し、
前記交通状況データベースサーバは、前記オートクルーズ走行判断部で前記プローブ車両がオートクルーズで走行中であると判断されると、前記プローブ車両IDあるいは前記車両側システムIDを記憶する、請求項1、3ないし6のいずれか1項に記載のセンター側システム。
【請求項8】
前記交通状況推定部で推定した前記交通状況を記憶する交通状況データベースサーバをさらに備え、
前記受信部は、前記プローブ車両位置情報とともに、前記携帯情報通信端末の携帯情報通信端末IDを受信し、
前記交通状況データベースサーバは、前記オートクルーズ走行判断部で前記プローブ車両がオートクルーズで走行中であると判断されると、前記携帯情報通信端末IDを記憶する、請求項2ないし6のいずれか1項に記載のセンター側システム。
【請求項9】
プローブ車両に搭載され、前記プローブ車両に関する情報をセンター側システムにアップロードする情報端末であって、
前記プローブ車両の位置に関する情報であるプローブ車両位置情報を取得する取得部と、
道路情報を含む地図情報を格納している地図データベースと、
前記取得部で取得した前記プローブ車両位置情報と、前記地図データベースに格納されている前記地図情報とに基づいて、前記プローブ車両がオートクルーズで走行中か否かを判断するオートクルーズ走行判断部と、
前記オートクルーズ走行判断部で判断された結果を前記オートクルーズ関連情報として前記センター側システムに送信する送信部と、
を備える、情報端末。
【請求項10】
前記地図データベースは、前記地図情報に道路の勾配情報を含み、
前記オートクルーズ走行判断部は、前記勾配情報に基づいて、前記プローブ車両が道路の勾配のある区間を一定の速度で走行中の場合はオートクルーズで走行中であると判断する、請求項9に記載の情報端末。
【請求項11】
前記地図データベースは、前記地図情報に道路のカーブ情報を含み、
前記オートクルーズ走行判断部は、前記カーブ情報に基づいて、前記プローブ車両が道路のカーブ区間を一定の速度で走行中の場合はオートクルーズで走行中であると判断する、請求項9に記載の情報端末。
【請求項12】
前記送信部は、前記プローブ車両のプローブ車両IDあるいは前記車両側システムの車両側システムIDを前記センター側システムに送信する、請求項9ないし11のいずれか1項に記載の情報端末。
【請求項13】
前記携帯端末は、携帯情報通信端末であって、
前記プローブ車両との通信により当該プローブ車両のオートクルーズ設定情報を前記オートクルーズ関連情報として取得し、前記センター側システムに送信する、請求項12に記載の情報端末。
【請求項14】
前記情報端末は携帯情報通信端末であって、
前記携帯情報通信端末の位置に関する情報である携帯端末位置情報または前記携帯端末位置情報に加えて前記携帯情報通信端末の速度に関する情報である携帯端末速度情報を前記センター側システムに送信する、請求項13に記載の情報端末。
【請求項15】
前記プローブ車両との通信により当該プローブ車両の位置に関する情報であるプローブ車両位置情報または前記プローブ車両位置情報に加えて前記プローブ車両の速度に関する情報であるプローブ車両速度情報を取得し、前記センター側システムに送信する、請求項13に記載の情報端末。
【請求項16】
前記情報端末は、携帯情報通信端末であって、
車両に搭載されていない場合は、センター側システムに情報をアップロードしないことを特徴とする、請求項12に記載の情報端末。
【図1】


【図2】

【図3】
【図4】

【図5】
【図6】
【図7】

【図8】
【図9】

【図10】

【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2013−105180(P2013−105180A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2011−246165(P2011−246165)
【出願日】平成23年11月10日(2011.11.10)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年11月10日(2011.11.10)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]