
タイヤ監視センサが備える送信方法、タイヤ監視センサ及びプログラム
【課題】本発明は、電源電池の消耗を低減すると共に、タイヤの情報を送信するタイミングを高精度に算出するタイヤ監視センサが備える送信方法を提供することを目的とする。
【解決手段】タイヤの加速度を検出する加速度センサとタイヤの空気圧を検出する圧力センサとタイヤの情報を送信する送信機とを有するタイヤ監視センサが備える送信方法であって、タイヤが回転を始めたことを検知した後に、タイヤの半回転に要する時間を算出し、前記時間をm分割した時間間隔で前記加速度を時系列に計測し、前記加速度から半周期前に計測した前記加速度を差し引いた差分を時系列に算出し、前期差分の時系列な変化から、送信機がタイヤの情報を送信するタイミングを算出する。
【解決手段】タイヤの加速度を検出する加速度センサとタイヤの空気圧を検出する圧力センサとタイヤの情報を送信する送信機とを有するタイヤ監視センサが備える送信方法であって、タイヤが回転を始めたことを検知した後に、タイヤの半回転に要する時間を算出し、前記時間をm分割した時間間隔で前記加速度を時系列に計測し、前記加速度から半周期前に計測した前記加速度を差し引いた差分を時系列に算出し、前期差分の時系列な変化から、送信機がタイヤの情報を送信するタイミングを算出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、タイヤの状態を検出する技術に係わり、特に、タイヤ監視センサの所定回転角度で無線信号を送信するために、タイヤ監視センサの回転角度を検出するタイヤ監視センサの送信方法とタイヤ監視センサに関する。
【背景技術】
【0002】
自動車等の車両の走行中にタイヤの空気圧やその異常等を監視するタイヤ空気圧監視システム、いわゆるTPMS(Tire Pressure Monitoring System)が知られている。
【0003】
特許文献1に開示されるタイヤ空気圧監視システムでは、各車輪に、圧力センサ、車輪側回転角度検出手段及び送信機から構成されるTPMSセンサ(タイヤ監視センサ)が取り付けられ、車体側に、受信機、車体側回転角度検出手段、車輪位置判別手段及びタイヤ識別符号登録手段が取り付けられている。
【0004】
各車輪に取り付けられたTPMSセンサの回転角度を車輪側と車体側とでそれぞれ検出すると共に、車輪側で検出したタイヤ空気圧及び回転角度等を無線信号にて受信機へ送信し、送信機から受信した回転角度と、この回転角度を受信したときに車体側で検出した各車輪の回転角度との各相対角度の変化を監視し、所定距離走行後に相対角度変化が最も小さな回転角度を検出した車輪位置を当該送信機の車輪位置と判別する。このように各車輪位置を判別することで、各車輪に対応するタイヤ空気圧が識別されて、タイヤ空気圧が監視されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2010−122023号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に開示されるタイヤ空気圧監視システムには、各車輪に取り付けられたTPMSセンサの回転方向加速度を検出する加速度センサ、タイヤの空気圧を検出する圧力センサ、電源電池等が取り付けられている。この回転方向加速度が所定の値になった際、即ち、TPMSセンサの所定回転角度で、タイヤ空気圧等の情報を送信機が無線信号で送信する。この一連の処理は、電源電池からの電力供給によってなされる。
【0007】
送信するタイミングを誤って送信エラーを発生させないために、タイヤ空気圧監視システムは、TPMSセンサの所定回転角度を正確に算出する必要があった。そのため、回転方向加速度の計測を高い頻度で繰り返し行うことやTPMSセンサが所定回転角度になるタイミングを算出する演算処理も詳細に行う必要があった。
【0008】
ところが、電源電池の消耗を低減するために回転方向加速度やタイヤ空気圧等の計測頻度を抑制する必要があると共に、送信エラーを発生させないために所定回転角度になるタイミングを高い精度で算出することが必要である。
【0009】
本発明の目的は、このような課題を顧みてなされたものであり、電源電池の消耗を低減すると共に、タイヤの情報を送信するタイミングを高精度に算出するタイヤ監視センサが備える送信方法を提供することである。
【課題を解決するための手段】
【0010】
タイヤの加速度を検出する加速度センサと前記タイヤの空気圧を検出する圧力センサと前記タイヤの情報を送信する送信機とを有するタイヤ監視センサが備える送信方法であって、前記タイヤが回転を始めたことを検知した後に、前記タイヤの半回転に要する時間を算出し、該時間をm分割した時間間隔で前記加速度を時系列に計測し、第2の加速度から半周期前に計測した第1の加速度を差し引いた差分を時系列に算出し、前記差分の時系列な変化から、前記送信機が前記タイヤの情報を送信するタイミングを算出することを特徴とする。
【0011】
このような態様であれば、前記タイヤが回転を始める前の車両が停止している際には、計測頻度を少なくできると共に前記タイヤの情報を送信しないようにできるので、電源電池の消耗を低減できる。
【0012】
第2の加速度から半周期前に計測した第1の加速度を差し引いた差分であることにより、前記差分は前記第1の加速度及び前記第2の加速度の略2倍の値になると共にその時系列な変化の周期が同じである。よって、前記差分は、差分であること及びその値が略2倍になることで、前記第1の加速度及び前記第2の加速度に比べてS/N比の良い時系列な変化をする。よって、このS/N比の良い前記差分の時系列な変化から前記送信するタイミングを算出することは、その算出を高精度にすると共に、その演算を簡素化できるので、電源電池の消耗を低減することができる。
【0013】
よって、本発明によれば、電源電池の消耗を低減すると共に、タイヤの情報を送信するタイミングを高精度に算出するタイヤ監視センサが備える送信方法を提供することができる。
【0014】
前記m分割が、互いに等しい間隔をなす分割であることが好ましい。
【0015】
このような態様であれば、タイヤの情報を送信するタイミングを簡素な手法で算出することができる。
【0016】
前記タイヤの半回転に要する時間を、時系列に算出された前記差分が減少し始める時間と次に増加し始める時間との時間差の絶対値として算出することが好ましい。
【0017】
このような態様であれば、前記タイヤの半回転に要する時間を、時系列に算出した前記差分から算出することができる。そして、前記差分は、計測値である前記加速度に比べてS/N比の良い時系列な変化をする。よって、この方法によれば、前記タイヤの半回転に要する時間を高精度に算出することができる。
【0018】
前記差分の時系列な変化から所定の加速度になる時間を算出し、該時間から前記タイヤの一回転に要する時間が経過した後に、前記送信機が前記タイヤの情報を送信することが好ましい。
【0019】
このような態様であれば、S/N比の良い前記差分から所定の加速度になる時間が高精度に算出され、この所定の加速度からタイヤの一回転に要する時間が経過した後に前記タイヤの情報が送信される。また、タイヤの一回転に要する時間もS/N比の良い前記差分から高精度に算出される。よって、高精度なタイミングでタイヤの情報を送信することが可能である。
【0020】
所定の時間間隔で前記加速度センサの計測を繰り返し、閾値以上の値が検知された際に前記タイヤが回転を始めたと判定することが好ましい。
【0021】
このような態様であれば、車両の停止状態と走行状態と区別することができる。よって、車両の停止状態において、計測頻度を少なくできると共に前記タイヤの情報を送信しないようにできるので、電源電池の消耗を低減できる。また、車両の走行状態では、その状態に適するタイヤ監視センサが備える送信方法を用いることができる。
【0022】
タイヤの加速度を検出する加速度センサと前記タイヤの空気圧を検出する圧力センサと前記タイヤの情報を送信する送信機とを有し、前記タイヤが回転を始めたことを検知した後に、前記タイヤの半回転に要する時間を算出し、該時間をm分割した時間間隔で前記加速度を時系列に計測し、第2の加速度から半周期前に計測した第1の加速度を差し引いた差分を時系列に算出し、前記差分の時系列な変化から、前記送信機が前記タイヤの情報を送信する時間を算出することが好ましい。
【0023】
このような態様であれば、前記タイヤが回転を始める前の車両が停止している際には、計測頻度を少なくできると共に前記タイヤの情報を送信しないようにできるので、電源電池の消耗を低減できる。
【0024】
第2の加速度から半周期前に計測した第1の加速度を差し引いた差分であることにより、前記差分は前記第1の加速度及び前記第2の加速度の略2倍の値になると共にその時系列な変化の周期が同じである。よって、前記差分は、差分であること及びその値が略2倍になることで、前記第1の加速度及び前記第2の加速度に比べてS/N比の良い時系列な変化をする。よって、このS/N比の良い前記差分の時系列な変化から前記送信するタイミングを算出することは、その算出を高精度にすると共に、その演算を簡素化できるので、電源電池の消耗を低減することができる。
【0025】
よって、本発明によれば、電源電池の消耗を低減すると共に、タイヤの情報を送信するタイミングを高精度に算出するタイヤ監視センサを提供することができる。
【0026】
前記加速度センサが、一軸方向の加速度を検知することが好ましい。
【0027】
前記一軸方向を前記タイヤの接線方向に向けて前記加速度センサを設置することで、前記加速度センサは、前記タイヤの回転方向加速度を検知することができる。また、前記タイヤの回転により生じる遠心力の影響を受け難いので、前記タイヤの法線方向を検知する加速度センサよりも高回転(高速)まで検知することができる。
【0028】
タイヤの加速度を検出する加速度センサと、前記タイヤの空気圧を検出する圧力センサと、前記タイヤの情報を送信する送信機と、を有するタイヤ監視センサが備えるプログラムであって、前記タイヤが回転を始めたことを算出する手順と、前記タイヤの半回転に要する時間を算出し、該時間をm分割した時間間隔で前記加速度を時系列に計測しサンプル時間を算出する手順と、前記サンプル時間の間隔で計測された複数の加速度を用いて、第2の加速度から半周期前に計測した第1の加速度を差し引いた差分を時系列に算出する手順と、前記差分の時系列な変化から、前記送信機が前記タイヤの情報を送信するタイミングを算出する手順とを実行することが好ましい。
【0029】
このような態様であれば、前記タイヤが回転を始める前の車両が停止している際には、計測頻度を少なくできると共に前記タイヤの情報を送信しないようにできるので、電源電池の消耗を低減できる。
【0030】
第2の加速度から半周期前に計測した第1の加速度を差し引いた差分であることにより、前記差分は前記第1の加速度及び前記第2の加速度の略2倍の値になると共にその時系列な変化の周期が同じである。よって、前記差分は、差分であること及びその値が略2倍になることで、前記第1の加速度及び前記第2の加速度に比べてS/N比の良い時系列な変化をする。よって、このS/N比の良い前記差分の時系列な変化から前記送信するタイミングを算出することは、その算出を高精度にすると共に、その演算を簡素化できるので、電源電池の消耗を低減することができる。
【0031】
よって、本発明によれば、電源電池の消耗を低減すると共に、タイヤの情報を送信するタイミングを高精度に算出するタイヤ監視センサが備えるプログラムを提供することができる。
【発明の効果】
【0032】
本発明によれば、電源電池の消耗を低減すると共に、タイヤの情報を送信するタイミングを高精度に算出するタイヤ監視センサが備える送信方法を提供することができる。
【図面の簡単な説明】
【0033】
【図1】第一の実施形態であるタイヤ監視センサの概略構成を示すブロック図である。
【図2】第一の実施形態であるタイヤ監視センサが備える送信方法のフローチャートである。
【図3】第一の実施形態であるタイヤ監視センサが計測する回転方向加速度の説明図である。
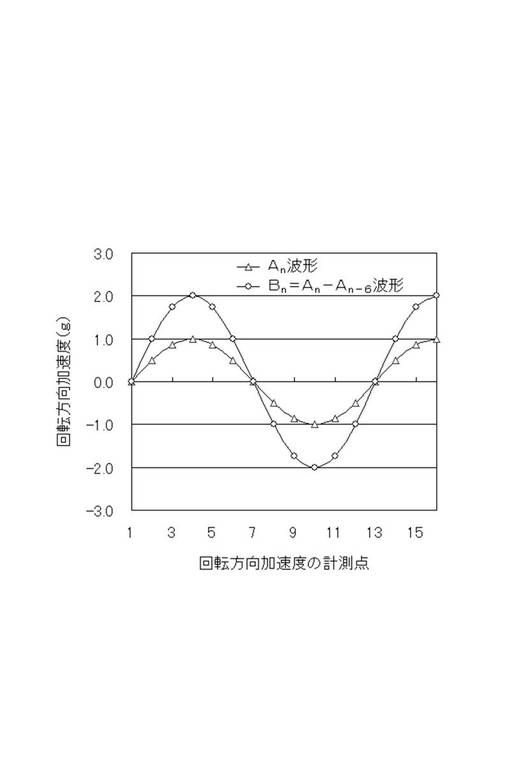
【図4】第一の実施形態である回転方向加速度と6回前回転方向加速度との差の時系列な変化を示す。
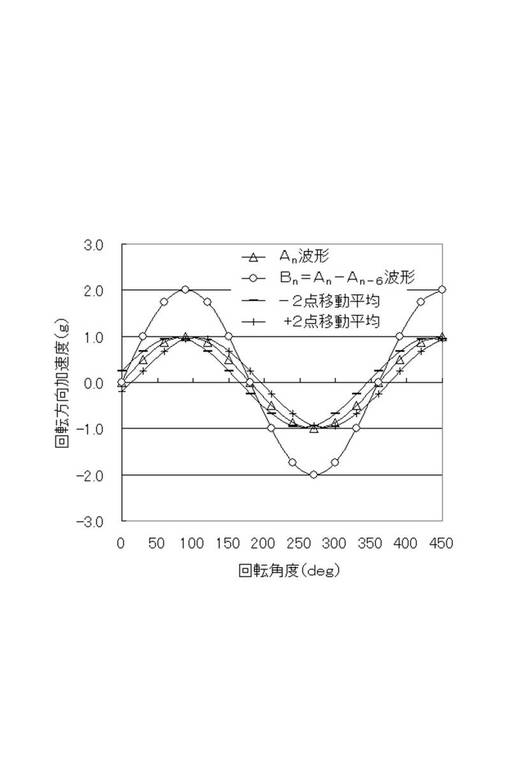
【図5】移動平均法で算出した回転方向加速度の変化を説明する図である。
【発明を実施するための形態】
【0034】
<第一の実施形態>
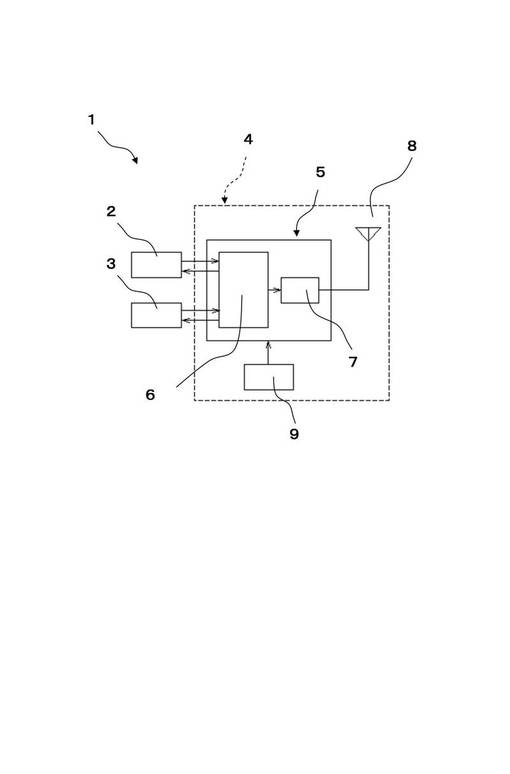
図1に第一の実施形態であるタイヤ監視センサ1の概略構成のブロック図を示す。図1に示すように、タイヤ監視センサ1は、圧力センサ2、加速度センサ3及び送信機4から構成されている。送信機4は、ASIC(Application Specific Integrated Circuit)5とアンテナ8等と、これらに電力を供給する電源電池9から構成されている。そして、ASIC5は、マイクロプロセッサー・ユニット(Micro−processor Unit)6やアンプ7等から構成されている。
【0035】
図1では詳細な説明に必要な構成を示すが、タイヤ監視センサ1として必須の構成であっても本明細書において説明しないものについては省略している。
【0036】
そして、圧力センサ2がタイヤ空気圧を検出する。また、本実施形態の加速度センサ3は一軸方向の加速度を検知する加速度センサであり、この加速度センサ3がタイヤ監視センサ1の回転方向加速度を検出する。圧力センサ2と加速度センサ3との出力信号は、マイクロプロセッサー・ユニット6によって演算処理され、アンプ7で増幅されて、アンテナ8によって無線信号として送信される。これらの一連の処理は、電源電池9から電力が供給されてなされる。
【0037】
タイヤ監視センサ1は、図示しないが各タイヤの空気バルブの近傍に取り付けられる。そして、加速度センサ3はタイヤ監視センサ1の回転方向加速度を検出するために、その一軸方向をタイヤがなす円の接線に平行にして、車両が前に進行する際のタイヤが回転する方向の加速度を検知するように設置されている。
【0038】
図示していないが、無線信号は、車体側のアンテナで受信され、電子制御ユニット(ECU:Electronic Control Unit)によって演算処理されて、ディスプレ表示画面等にタイヤ空気圧や、また、タイヤ空気圧に異常が認められた際には警報等が表示される。
【0039】
このように、タイヤ空気圧等に関する情報を車体側のアンテナが受信するが、この車体側のアンテナをタイヤの近傍に設置し、障害物等を避けることで、受信の効率や信頼性などが向上することが知られている。
【0040】
よって、タイヤと一体的に回転するタイヤ監視センサ1が、タイヤの一回転毎に、車体側のアンテナの近くを通過するように、車体側のアンテナはタイヤ近傍の車体部に固定されることが好ましい。このようにして、タイヤ監視センサ1は、車体側のアンテナに対向する位置で、アンテナ8から車体側のアンテナに向けて無線信号を送信することができる。
【0041】
タイヤの情報としてはタイヤ空気圧以外にも、タイヤ空気の温度や湿度、タイヤ内の気体成分、タイヤの固定状態や溝状態等も含むことが可能である。
【0042】
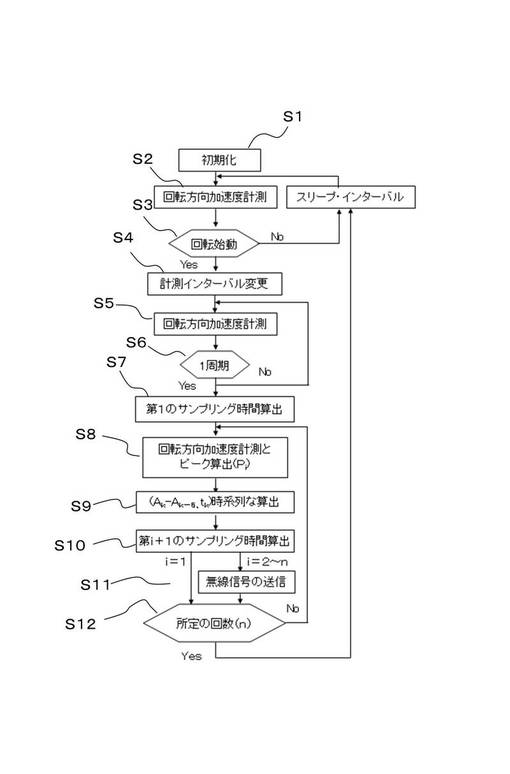
特許文献1においては、TPMSセンサの回転方向加速度が1gもしくは−1gとなったタイミングで、タイヤ側に設置されたTPMSセンサ(タイヤ監視センサ)が無線信号を送信する。1gは重力加速度を意味し、その値は9.80665m/s2である。
【0043】
タイヤ監視センサ1の回転方向加速度は、タイヤの回転に応じて、図3(a)に示すように、0g→1g→0g→−1g→0g→1gと繰り返す。図3(b)に示すように、1gと−1gは加速度センサ3がタイヤ回転中心に対して左右に位置する際の値であり、0gは加速度センサ3がタイヤ回転中心に対して上下に位置する際の値である。
【0044】
図3(a)に示す波形の一周期がタイヤの一回転に相当する。走行中、路面の凹凸等によるタイヤの振動などのノイズが加速度センサ3の出力信号に乗ることがあるが、図3(a)においては、回転方向加速度の変化を模式的に説明するために実際より単純に変化する正弦波とした。
【0045】
本実施形態においては、タイヤ監視センサ1の回転方向加速度が1gとなるタイミングで、タイヤ監視センサ1が無線信号を送信する。このタイミングを算出する精度が悪いと、車体側のアンテナからはずれた位置で、タイヤ側のタイヤ監視センサ1が無線信号を送信することになる。その結果、車体側のアンテナが無線信号を正確に受信できなくなり、受信エラーが発生することがある。
【0046】
このため、前記タイミングを精度良く算出することは重要である。ところが、従来から用いられる移動平均法、即ち、時系列データにおいて、ある一定区間ごとの平均値を区間をずらしながら求める方法では、前記タイミングを精度良く算出しようとすると、一定区間ごとの平均するデータ数を増やすことが必要になる。タイヤ監視センサ1に照らして考えると、マイクロプロセッサー・ユニット6が、加速度センサ3に短い時間間隔、即ち、高い頻度で繰り返し計測させ、多くの計測データを平均する詳細な演算処理によって、所定の回転方向加速度になるタイミングを算出することになる。
【0047】
このように、短い時間間隔での連続的な計測や大量のデータ処理を行うことは、電源電池9の消耗を早めるため避ける必要があった。よって、受信エラーを発生させることなく電源電池9の消耗を低減するために、計測頻度を減らせると共に簡単な演算処理でありながら、タイヤ監視センサ1が所定回転角度になるタイミング、即ちタイヤの情報を送信するタイミングを高精度に算出する方法が望まれていた。
【0048】
本実施形態は、このような課題を鑑みてなされたものであり、電源電池9の消耗を低減すると共に、タイヤの情報を送信するタイミングを高精度に算出するタイヤ監視センサの送信方法とタイヤ監視センサを提供することである。
【0049】
本実施形態においては、タイヤ監視センサ1の回転方向加速度が1gとなるタイミングで、タイヤ監視センサ1が無線信号を送信するとしたが、これに限定されるものではない。車体側のアンテナをタイヤに近接した前記以外の車体部に設置し、タイヤ監視センサ1は、この車体側のアンテナに対向する位置で無線信号を送信することが可能である。
【0050】
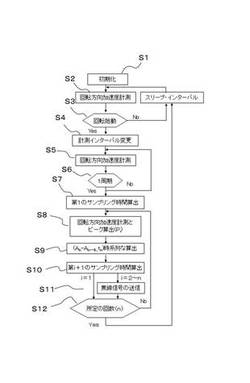
図2に第一の実施形態であるタイヤ監視センサが備える送信方法のフローチャートを示す。ステップS1では、タイヤ監視センサ1の初期化がなされる。即ち、タイヤにタイヤ監視センサ1を取り付けた際に、感度調整や停車時の計測インターバル等の設定を行う。
【0051】
車両の停車時を想定するステップS2では、電源電池9の消耗を避けるために、計測頻度を抑える工夫がなされる。タイヤ監視センサ1は、例えば、1分間に、10秒の計測インターバルで回転方向加速度Ak(k=1〜6)の計測を時系列に行う。そして、ステップS3で、マイクロプロセッサー・ユニット6が、k+1回目の回転方向加速度Ak+1からk回目の回転方向加速度Akとの差Dk(Dk=Ak+1−Ak:k=1〜5)を算出し、前記差Dk(k=1〜5)の絶対値を第1の閾値(例えば、0.1g)と比較する。全ての差Dk(k=1〜5)の絶対値が第1の閾値以下である際には車両は停車していると判定し、スリープ・インターバル(休止期間)、本実施形態では例えば2分間を経てステップS2に戻る。この差Dk(k=1〜5)の絶対値に第1の閾値以上のものがある際には、車両が動き始めた(タイヤが回転を始めた)、または動いていると判定し、ステップS4に進む。
【0052】
車両が停止していると判定されるステップS2→ステップS3→ステップS2の繰り返しステップでは、無線信号は送信されない。また、スリープ・インターバル(休止期間)も設けられている。このことは、電源電池9の消耗を低減することに有効である。
【0053】
ステップS4で、回転方向加速度をより精度良くに計測するために、ステップS2より短い計測インターバル、例えば、0.05秒を設定し、ステップS5に進む。
【0054】
ステップS5においては、回転方向加速度を計測インターバル0.05秒で、例えば24回ほど計測し、ステップS6に進む。
【0055】
ステップS6において、時系列に計測されたステップS5の全ての回転方向加速度Ak(k=1〜24)に対し、k+1回目の回転方向加速度Ak+1からk回目の回転方向加速度Akとの差Dk(Dk=Ak+1−Ak:k=1〜23)を算出し、前記差Dk(k=1〜23)の絶対値の全てが第2の閾値(例えば、0.2g)以下であれば、ステップS5に戻る。そうでない際には、ステップS7に進む。
【0056】
車両の速度が遅くタイヤの一回転に数秒程度の時間が掛かり、24回の回転方向加速度の計測の全て(0.05秒×24回=1.2秒)がタイヤの半回転内でなされる際には、前記差(Dk:k=1〜23)の絶対値は0.083g(2g/24=0.083g)程度以下である。車両の速度が増して、24回の回転方向加速度の計測の全て(0.05秒×24回=1.2秒)がタイヤの1回転を越えてくると、前記差(Dk:k=1〜23)の絶対値は0.17g(2g/12=0.17g)より大きくなってくる。第2の閾値が0.2g(2g/10=0.2g)であることは、24回の回転方向加速度の計測が、タイヤの1回転(0g→1g→0g→−1g→0g)を跨ってなされ始めることを意味する。
【0057】
ところが、すでに車両が高速での走行中である際には、24回の回転方向加速度の計測の全て(0.05秒×24回=1.2秒)の内に、タイヤは2回以上の回転をしていることが想定される。
【0058】
ステップS7においては、ステップS6で算出された時系列なDk(Dk=Ak+1−Ak、tk:k=1〜23)を比較して、Dkが正から負に変わる時刻txとDkが負から正に変わる時刻tyとを抽出する。そして、最初にDkが正から負に変わる時刻txがある際には、次にあるDkが負から正に変わる時刻tyから最初にDkが正から負に変わる時刻txを差し引いた時間を6で割り、第一のサンプリング時間(Δt1)とする。そうではなく、最初にDkが負から正に変わる時刻tyがある際には、次にあるDkが正から負に変わる時刻txから最初にDkが負から正に変わる時刻tyを差し引いた時間を6で割り、第一のサンプリング時間(Δt1)とする。そして、ステップS8に進む。
【0059】
Dkが正から負に変わる時刻txと次にDkが負から正に変わる時刻tyと、またはDkが負から正に変わる時刻tyと次にDkが正から負に変わる時刻txとの間は、山と谷とのピークの間に相当するので半周期(タイヤの半回転)に相当する。この半周期を6で割った第一のサンプリング時間(Δt1)は、一周期を12で割った時間に相当する。
【0060】
本実施形態では、一周期を12分割としてサンプリング時間を算出したが、これに限定されるものではなく、任意の分割が可能である。また、サンプル時間(Δt)を等しい時間間隔で分割することは演算処理を簡潔にする。
【0061】
ステップS8において、ステップS7で算出した第一のサンプリング時間(Δt1)の間隔で時系列な時刻(tk)に、前後の計測値を比較しながら回転方向加速度を計測する。即ち、回転方向加速度の差Dk(Dk=Ak+1−Ak)が、計測を開始してから最初に負となり、次に前記Dkが3回以上に連続して正であり、次に前記Dkが3回以上に連続して負であり、次に前記Dkが3回以上に連続して正であることを時系列に経て、前記Dkが正から負に変わる計測点(k1)まで計測する。そして、前記正から負に変わる計測点(k1)の回転方向加速度とその時刻(Ak1、tk1)を第一のピーク(P1、t1)とする。そして、ステップS9に進む。
【0062】
前記では、次に正、負及び正がそれぞれ3回以上に連続して続いた後に、と述べたが、場合によっては、それぞれ1回も可能である。
【0063】
ステップS9において、ステップS8で時系列に計測した回転方向加速度に対して、計測値(第2の加速度)から6回前の計測値(第1の加速度)を差し引いた値と時刻との時系列な関係を、第一のピーク(P1、t1)から15遡った計測点まで算出する。即ち、Bk=Ak−Ak−6とtkとの関係を、k=k1−15〜k1の範囲で求める。ただし、k1は、第一のピーク(P1、t1)の計測点を意味する。
【0064】
ステップS10において、ステップS9で算出された時系列なBk=Ak−Ak−6、tk(k=k1−15〜k1)を比較して、Bkが増加し始める時刻tyからBkが減少し始める時刻txを差し引いた時間を6で割り、第二のサンプリング時間(Δt2)とする。Bkが増加し始める時刻tyは、図4の最小のピークに相当し、Bkが減少し始める時刻txは、図4の最初の最大ピークに相当する。
【0065】
差分Bk=Ak−Ak−6が減少し始める時刻txと差分Bkが増加し始める時刻tyとの時間差の絶対値は、タイヤの半回転に要する時間に相当する。
【0066】
1回目はステップS11を実行しないでステップS8に戻り、ステップS8で第二のサンプリング時間(Δt2)を用いて回転方向加速度の計測を行い第二のピーク(P2、t2)を算出する。ステップS9で、第二のピーク(P2、t2)からBk=Ak−Ak−6とtkとの時系列な関係を、k=k2−15〜k2の範囲で求める。ステップS10で第三のサンプリング時間(Δt3)を算出する。
【0067】
ステップS11において、回転方向加速度が1gである第二のピーク(P2、t2)の時刻t2に対し、第二のサンプリング時間Δt2の12倍の時間が経過した後に、即ちタイヤの一回転に相当する時間が経過した後に、次に回転方向加速度が1gとなるピークが来ると予想される。よって、タイヤ監視センサ1は、第二のピーク(P2、t2)の時刻t2に対してタイヤの一回転に相当する時間が経過した後に、即ち、t2+Δt2×12の時刻に無線信号を送信する。
【0068】
このように、ステップS8で第iのサンプリング時間(Δti)を用いて回転方向加速度の計測を行い第iのピーク(Pi、ti)を算出する。ステップS9でBk=Ak−Ak−6とtkとの時系列な関係を求め、ステップS10で第i+1のサンプリング時間(Δti+1)を算出する。そして、ステップS11で、タイヤ監視センサ1は、第iのピーク(Pi、ti)の時刻tiに対してタイヤの一回転に相当する時間が経過した後に、即ち、ti+Δti×12の時刻に無線信号を送信する。
【0069】
ステップS12で判定されて、前記の繰り返しが、所定の回数(n)まで繰り返される。
【0070】
ステップS5で、回転方向加速度を計測インターバル0.05秒で、例えば24回ほど計測がなされ、この計測値を用いてステップS6とステップS7で演算処理がなされる。計測頻度が24と多いのは、タイヤ監視センサ1の一周期の回転を正確に求めるためである。この24回の計測は、無線信号の送信とそのタイミングを算出するステップS8→ステップS9→ステップS10→ステップS11→ステップS12を繰り返し行うステップの前に、1回だけ行うように少なく抑えられている。また、この繰り返し行うステップでの計測頻度は12回と少なく抑えられている。このように、電源電池9の消耗を抑えている。
【0071】
そして、ステップS12で、所定の回数(n)繰り返したと判定されると、スリープ・インターバル(休止期間)、本実施形態では30分間程度を経てステップS2に戻る。このスリープ・インターバル(休止期間)を設けることで、電源電池9の消耗を低減している。
【0072】
図4に示すように、Bk=Ak−Ak−6の時系列な変化を、計測値であるAkの時系列な変化と比べると、時間に対する変化の周期は同じで、その値が略2倍になっている。Bkは差分であることからオフセット的な誤差は削除される。また、差分によってBkはAkの略2倍になっているが、差分によってノイズのようなランダムな誤差は2倍以下になる。よって、Bk=Ak−Ak−6の時系列な値からなるグラフは、計測値であるAkの時系列な値からなるグラフに対して、S/N比に優れる。
【0073】
よって、S/N比の良いBk=Ak−Ak−6の時系列な変化からは、サンプリング時間(Δti)及び1gとなるピーク(Pi、ti)を高精度に算出できるので、無線信号を送信するタイミング、即ち、ti+Δti×12を高精度に算出することが可能である。
【0074】
Bk=Ak−Ak−6のグラフは、Akから半周期前のAk−6を引いて得ているので、移動平均法では一定区間ごとに二つのAkを平均することに相当する。このように、二つのAkを使って、移動平均をすることを考えてみる。
【0075】
図5に示すように、Ak+1とAkを平均して、その値をAk+1に対応する時刻tk+1に割り与える(図5の+2点移動平均)と、元のグラフ(図5のAk波形)に比べて位相が先に進む。逆に、Ak+1とAkを平均して、その値をAkに対応する時刻tkに割り与える(図5の−2点移動平均)と、元のグラフに比べて位相が遅れる。位相のずれが起らないようにするためには、一定区間ごとに三つのAkを平均し、平均値を中央の時刻tkに割り与えることが必要である。このように、移動平均法では、本実施形態と同じように位相のずれが起らないようにするためには、最低でも処理するデータ量が1.5倍になる。ただし、図5は、回転方向加速度(g)とタイヤの回転角度(deg)との関係を示し、横軸の原点を回転方向加速度、即ち、計測値であるAkが0gである任意の点としている。
【0076】
本実施形態で位相ずれが起らない理由は、ほぼ同じ周期で変化する半周期程にずれたAkとAk−6との差分から時系列に変化するグラフ(Bk=Ak−Ak−6)を得ているからである。
【0077】
本実施形態では、第iのピーク(Pi、ti)の時刻tiに対し、次に、1周期が経過した後の回転方向加速度が1gとなるピークで、タイヤ監視センサ1が無線信号を送信するように設定したが、これに限定されるものではなく、2周期が経過した後、3周期が経過した後等も可能である。
【0078】
本実施形態では、第iのピーク(Pi、ti)の時刻tiに対し、次に、1周期が経過した後の回転方向加速が1gとなるピークを、第iのサンプリング時間(Δti)を用いて算出したが、これに限定されるものではなく、第i+1のサンプリング時間(Δti+1)を用いることも可能である。
【0079】
本実施形態では、ステップS12での判定を所定の回数(n)としたが、所定の時間に設定することもできる。所定の回数(n)を3にすると、例えば、タイヤの外径が25インチの車両が時速60km/hで走行している際には、所定の時間は1分程度に相当する。
【0080】
<第二の実施形態>
第二の実施形態は、図2のタイヤ監視センサ手法を示すフローチャートにおいて、第一の実施形態と、ステップS7とステップS10とが異なるが、他のステップは同じである。
【0081】
第二の実施形態のステップS7は、ステップS5で計測した全ての回転方向加速度Ak(k=1〜24)を第3の閾値及び第4の閾値と比較する。第3の閾値は、例えば、+0.9gであり、第4の閾値は、例えば、−0.9gである。Ak(k=1〜24)が+0.9gより大きい物と、Ak(k=1〜24)が−0.9gより小さい物を抽出する。そして、抽出した物を比較して、+0.9gより大きい物に対しては、時系列に連続している物がある際には、その内で最大な物を抽出する。抽出した物を比較して、−0.9gより小さい物に対しては、時系列に連続している物がある際には、その内で最小な物を抽出する。このようにして、ステップS5で計測した時系列なAk(k=1〜24)に対して、時系列に正のピークと負のピークを配列させることができる。そして、正のピークと負のピークとの隣り合うピークを抽出して、それらに対応する時刻の差を6で割り、その絶対値を求めて第一のサンプリング時間(Δt1)とする。
【0082】
正のピークと負のピークとの隣り合うピークが複数ある際に、それらに対応する時刻の差を6で割り、その絶対値を求める。そして、複数の前記絶対値の平均値を第一のサンプリング時間(Δt1)とすることも可能である。
【0083】
第二の実施形態のステップS10は、この15個の組み合わせ(Bk=Ak−Ak−6、tk:k=k1−15〜k1)に対して、15個の組み合わせの内の最後の三つを削除した組み合わせ、即ち、Bk(k1−15〜k1−3)の内から最大値(Bmax)と最小値(Bmin)を算出する。そして、最大値(Bmax)と最小値(Bmin)とに当たる時刻を差し引いた時間を6で割り、その絶対値を求めて第二のサンプリング時間(Δt2)とする。また、第二のサンプリング時間(Δt2)以降のサンプリング時間も、この方法で算出することができる。
【符号の説明】
【0084】
1 タイヤ監視センサ
2 圧力センサ
3 加速度センサ
4 送信機
5 ASIC
6 マイクロプロセッサー・ユニット
7 アンプ
8 アンテナ
9 電源電池
【技術分野】
【0001】
本発明は、タイヤの状態を検出する技術に係わり、特に、タイヤ監視センサの所定回転角度で無線信号を送信するために、タイヤ監視センサの回転角度を検出するタイヤ監視センサの送信方法とタイヤ監視センサに関する。
【背景技術】
【0002】
自動車等の車両の走行中にタイヤの空気圧やその異常等を監視するタイヤ空気圧監視システム、いわゆるTPMS(Tire Pressure Monitoring System)が知られている。
【0003】
特許文献1に開示されるタイヤ空気圧監視システムでは、各車輪に、圧力センサ、車輪側回転角度検出手段及び送信機から構成されるTPMSセンサ(タイヤ監視センサ)が取り付けられ、車体側に、受信機、車体側回転角度検出手段、車輪位置判別手段及びタイヤ識別符号登録手段が取り付けられている。
【0004】
各車輪に取り付けられたTPMSセンサの回転角度を車輪側と車体側とでそれぞれ検出すると共に、車輪側で検出したタイヤ空気圧及び回転角度等を無線信号にて受信機へ送信し、送信機から受信した回転角度と、この回転角度を受信したときに車体側で検出した各車輪の回転角度との各相対角度の変化を監視し、所定距離走行後に相対角度変化が最も小さな回転角度を検出した車輪位置を当該送信機の車輪位置と判別する。このように各車輪位置を判別することで、各車輪に対応するタイヤ空気圧が識別されて、タイヤ空気圧が監視されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2010−122023号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に開示されるタイヤ空気圧監視システムには、各車輪に取り付けられたTPMSセンサの回転方向加速度を検出する加速度センサ、タイヤの空気圧を検出する圧力センサ、電源電池等が取り付けられている。この回転方向加速度が所定の値になった際、即ち、TPMSセンサの所定回転角度で、タイヤ空気圧等の情報を送信機が無線信号で送信する。この一連の処理は、電源電池からの電力供給によってなされる。
【0007】
送信するタイミングを誤って送信エラーを発生させないために、タイヤ空気圧監視システムは、TPMSセンサの所定回転角度を正確に算出する必要があった。そのため、回転方向加速度の計測を高い頻度で繰り返し行うことやTPMSセンサが所定回転角度になるタイミングを算出する演算処理も詳細に行う必要があった。
【0008】
ところが、電源電池の消耗を低減するために回転方向加速度やタイヤ空気圧等の計測頻度を抑制する必要があると共に、送信エラーを発生させないために所定回転角度になるタイミングを高い精度で算出することが必要である。
【0009】
本発明の目的は、このような課題を顧みてなされたものであり、電源電池の消耗を低減すると共に、タイヤの情報を送信するタイミングを高精度に算出するタイヤ監視センサが備える送信方法を提供することである。
【課題を解決するための手段】
【0010】
タイヤの加速度を検出する加速度センサと前記タイヤの空気圧を検出する圧力センサと前記タイヤの情報を送信する送信機とを有するタイヤ監視センサが備える送信方法であって、前記タイヤが回転を始めたことを検知した後に、前記タイヤの半回転に要する時間を算出し、該時間をm分割した時間間隔で前記加速度を時系列に計測し、第2の加速度から半周期前に計測した第1の加速度を差し引いた差分を時系列に算出し、前記差分の時系列な変化から、前記送信機が前記タイヤの情報を送信するタイミングを算出することを特徴とする。
【0011】
このような態様であれば、前記タイヤが回転を始める前の車両が停止している際には、計測頻度を少なくできると共に前記タイヤの情報を送信しないようにできるので、電源電池の消耗を低減できる。
【0012】
第2の加速度から半周期前に計測した第1の加速度を差し引いた差分であることにより、前記差分は前記第1の加速度及び前記第2の加速度の略2倍の値になると共にその時系列な変化の周期が同じである。よって、前記差分は、差分であること及びその値が略2倍になることで、前記第1の加速度及び前記第2の加速度に比べてS/N比の良い時系列な変化をする。よって、このS/N比の良い前記差分の時系列な変化から前記送信するタイミングを算出することは、その算出を高精度にすると共に、その演算を簡素化できるので、電源電池の消耗を低減することができる。
【0013】
よって、本発明によれば、電源電池の消耗を低減すると共に、タイヤの情報を送信するタイミングを高精度に算出するタイヤ監視センサが備える送信方法を提供することができる。
【0014】
前記m分割が、互いに等しい間隔をなす分割であることが好ましい。
【0015】
このような態様であれば、タイヤの情報を送信するタイミングを簡素な手法で算出することができる。
【0016】
前記タイヤの半回転に要する時間を、時系列に算出された前記差分が減少し始める時間と次に増加し始める時間との時間差の絶対値として算出することが好ましい。
【0017】
このような態様であれば、前記タイヤの半回転に要する時間を、時系列に算出した前記差分から算出することができる。そして、前記差分は、計測値である前記加速度に比べてS/N比の良い時系列な変化をする。よって、この方法によれば、前記タイヤの半回転に要する時間を高精度に算出することができる。
【0018】
前記差分の時系列な変化から所定の加速度になる時間を算出し、該時間から前記タイヤの一回転に要する時間が経過した後に、前記送信機が前記タイヤの情報を送信することが好ましい。
【0019】
このような態様であれば、S/N比の良い前記差分から所定の加速度になる時間が高精度に算出され、この所定の加速度からタイヤの一回転に要する時間が経過した後に前記タイヤの情報が送信される。また、タイヤの一回転に要する時間もS/N比の良い前記差分から高精度に算出される。よって、高精度なタイミングでタイヤの情報を送信することが可能である。
【0020】
所定の時間間隔で前記加速度センサの計測を繰り返し、閾値以上の値が検知された際に前記タイヤが回転を始めたと判定することが好ましい。
【0021】
このような態様であれば、車両の停止状態と走行状態と区別することができる。よって、車両の停止状態において、計測頻度を少なくできると共に前記タイヤの情報を送信しないようにできるので、電源電池の消耗を低減できる。また、車両の走行状態では、その状態に適するタイヤ監視センサが備える送信方法を用いることができる。
【0022】
タイヤの加速度を検出する加速度センサと前記タイヤの空気圧を検出する圧力センサと前記タイヤの情報を送信する送信機とを有し、前記タイヤが回転を始めたことを検知した後に、前記タイヤの半回転に要する時間を算出し、該時間をm分割した時間間隔で前記加速度を時系列に計測し、第2の加速度から半周期前に計測した第1の加速度を差し引いた差分を時系列に算出し、前記差分の時系列な変化から、前記送信機が前記タイヤの情報を送信する時間を算出することが好ましい。
【0023】
このような態様であれば、前記タイヤが回転を始める前の車両が停止している際には、計測頻度を少なくできると共に前記タイヤの情報を送信しないようにできるので、電源電池の消耗を低減できる。
【0024】
第2の加速度から半周期前に計測した第1の加速度を差し引いた差分であることにより、前記差分は前記第1の加速度及び前記第2の加速度の略2倍の値になると共にその時系列な変化の周期が同じである。よって、前記差分は、差分であること及びその値が略2倍になることで、前記第1の加速度及び前記第2の加速度に比べてS/N比の良い時系列な変化をする。よって、このS/N比の良い前記差分の時系列な変化から前記送信するタイミングを算出することは、その算出を高精度にすると共に、その演算を簡素化できるので、電源電池の消耗を低減することができる。
【0025】
よって、本発明によれば、電源電池の消耗を低減すると共に、タイヤの情報を送信するタイミングを高精度に算出するタイヤ監視センサを提供することができる。
【0026】
前記加速度センサが、一軸方向の加速度を検知することが好ましい。
【0027】
前記一軸方向を前記タイヤの接線方向に向けて前記加速度センサを設置することで、前記加速度センサは、前記タイヤの回転方向加速度を検知することができる。また、前記タイヤの回転により生じる遠心力の影響を受け難いので、前記タイヤの法線方向を検知する加速度センサよりも高回転(高速)まで検知することができる。
【0028】
タイヤの加速度を検出する加速度センサと、前記タイヤの空気圧を検出する圧力センサと、前記タイヤの情報を送信する送信機と、を有するタイヤ監視センサが備えるプログラムであって、前記タイヤが回転を始めたことを算出する手順と、前記タイヤの半回転に要する時間を算出し、該時間をm分割した時間間隔で前記加速度を時系列に計測しサンプル時間を算出する手順と、前記サンプル時間の間隔で計測された複数の加速度を用いて、第2の加速度から半周期前に計測した第1の加速度を差し引いた差分を時系列に算出する手順と、前記差分の時系列な変化から、前記送信機が前記タイヤの情報を送信するタイミングを算出する手順とを実行することが好ましい。
【0029】
このような態様であれば、前記タイヤが回転を始める前の車両が停止している際には、計測頻度を少なくできると共に前記タイヤの情報を送信しないようにできるので、電源電池の消耗を低減できる。
【0030】
第2の加速度から半周期前に計測した第1の加速度を差し引いた差分であることにより、前記差分は前記第1の加速度及び前記第2の加速度の略2倍の値になると共にその時系列な変化の周期が同じである。よって、前記差分は、差分であること及びその値が略2倍になることで、前記第1の加速度及び前記第2の加速度に比べてS/N比の良い時系列な変化をする。よって、このS/N比の良い前記差分の時系列な変化から前記送信するタイミングを算出することは、その算出を高精度にすると共に、その演算を簡素化できるので、電源電池の消耗を低減することができる。
【0031】
よって、本発明によれば、電源電池の消耗を低減すると共に、タイヤの情報を送信するタイミングを高精度に算出するタイヤ監視センサが備えるプログラムを提供することができる。
【発明の効果】
【0032】
本発明によれば、電源電池の消耗を低減すると共に、タイヤの情報を送信するタイミングを高精度に算出するタイヤ監視センサが備える送信方法を提供することができる。
【図面の簡単な説明】
【0033】
【図1】第一の実施形態であるタイヤ監視センサの概略構成を示すブロック図である。
【図2】第一の実施形態であるタイヤ監視センサが備える送信方法のフローチャートである。
【図3】第一の実施形態であるタイヤ監視センサが計測する回転方向加速度の説明図である。
【図4】第一の実施形態である回転方向加速度と6回前回転方向加速度との差の時系列な変化を示す。
【図5】移動平均法で算出した回転方向加速度の変化を説明する図である。
【発明を実施するための形態】
【0034】
<第一の実施形態>
図1に第一の実施形態であるタイヤ監視センサ1の概略構成のブロック図を示す。図1に示すように、タイヤ監視センサ1は、圧力センサ2、加速度センサ3及び送信機4から構成されている。送信機4は、ASIC(Application Specific Integrated Circuit)5とアンテナ8等と、これらに電力を供給する電源電池9から構成されている。そして、ASIC5は、マイクロプロセッサー・ユニット(Micro−processor Unit)6やアンプ7等から構成されている。
【0035】
図1では詳細な説明に必要な構成を示すが、タイヤ監視センサ1として必須の構成であっても本明細書において説明しないものについては省略している。
【0036】
そして、圧力センサ2がタイヤ空気圧を検出する。また、本実施形態の加速度センサ3は一軸方向の加速度を検知する加速度センサであり、この加速度センサ3がタイヤ監視センサ1の回転方向加速度を検出する。圧力センサ2と加速度センサ3との出力信号は、マイクロプロセッサー・ユニット6によって演算処理され、アンプ7で増幅されて、アンテナ8によって無線信号として送信される。これらの一連の処理は、電源電池9から電力が供給されてなされる。
【0037】
タイヤ監視センサ1は、図示しないが各タイヤの空気バルブの近傍に取り付けられる。そして、加速度センサ3はタイヤ監視センサ1の回転方向加速度を検出するために、その一軸方向をタイヤがなす円の接線に平行にして、車両が前に進行する際のタイヤが回転する方向の加速度を検知するように設置されている。
【0038】
図示していないが、無線信号は、車体側のアンテナで受信され、電子制御ユニット(ECU:Electronic Control Unit)によって演算処理されて、ディスプレ表示画面等にタイヤ空気圧や、また、タイヤ空気圧に異常が認められた際には警報等が表示される。
【0039】
このように、タイヤ空気圧等に関する情報を車体側のアンテナが受信するが、この車体側のアンテナをタイヤの近傍に設置し、障害物等を避けることで、受信の効率や信頼性などが向上することが知られている。
【0040】
よって、タイヤと一体的に回転するタイヤ監視センサ1が、タイヤの一回転毎に、車体側のアンテナの近くを通過するように、車体側のアンテナはタイヤ近傍の車体部に固定されることが好ましい。このようにして、タイヤ監視センサ1は、車体側のアンテナに対向する位置で、アンテナ8から車体側のアンテナに向けて無線信号を送信することができる。
【0041】
タイヤの情報としてはタイヤ空気圧以外にも、タイヤ空気の温度や湿度、タイヤ内の気体成分、タイヤの固定状態や溝状態等も含むことが可能である。
【0042】
特許文献1においては、TPMSセンサの回転方向加速度が1gもしくは−1gとなったタイミングで、タイヤ側に設置されたTPMSセンサ(タイヤ監視センサ)が無線信号を送信する。1gは重力加速度を意味し、その値は9.80665m/s2である。
【0043】
タイヤ監視センサ1の回転方向加速度は、タイヤの回転に応じて、図3(a)に示すように、0g→1g→0g→−1g→0g→1gと繰り返す。図3(b)に示すように、1gと−1gは加速度センサ3がタイヤ回転中心に対して左右に位置する際の値であり、0gは加速度センサ3がタイヤ回転中心に対して上下に位置する際の値である。
【0044】
図3(a)に示す波形の一周期がタイヤの一回転に相当する。走行中、路面の凹凸等によるタイヤの振動などのノイズが加速度センサ3の出力信号に乗ることがあるが、図3(a)においては、回転方向加速度の変化を模式的に説明するために実際より単純に変化する正弦波とした。
【0045】
本実施形態においては、タイヤ監視センサ1の回転方向加速度が1gとなるタイミングで、タイヤ監視センサ1が無線信号を送信する。このタイミングを算出する精度が悪いと、車体側のアンテナからはずれた位置で、タイヤ側のタイヤ監視センサ1が無線信号を送信することになる。その結果、車体側のアンテナが無線信号を正確に受信できなくなり、受信エラーが発生することがある。
【0046】
このため、前記タイミングを精度良く算出することは重要である。ところが、従来から用いられる移動平均法、即ち、時系列データにおいて、ある一定区間ごとの平均値を区間をずらしながら求める方法では、前記タイミングを精度良く算出しようとすると、一定区間ごとの平均するデータ数を増やすことが必要になる。タイヤ監視センサ1に照らして考えると、マイクロプロセッサー・ユニット6が、加速度センサ3に短い時間間隔、即ち、高い頻度で繰り返し計測させ、多くの計測データを平均する詳細な演算処理によって、所定の回転方向加速度になるタイミングを算出することになる。
【0047】
このように、短い時間間隔での連続的な計測や大量のデータ処理を行うことは、電源電池9の消耗を早めるため避ける必要があった。よって、受信エラーを発生させることなく電源電池9の消耗を低減するために、計測頻度を減らせると共に簡単な演算処理でありながら、タイヤ監視センサ1が所定回転角度になるタイミング、即ちタイヤの情報を送信するタイミングを高精度に算出する方法が望まれていた。
【0048】
本実施形態は、このような課題を鑑みてなされたものであり、電源電池9の消耗を低減すると共に、タイヤの情報を送信するタイミングを高精度に算出するタイヤ監視センサの送信方法とタイヤ監視センサを提供することである。
【0049】
本実施形態においては、タイヤ監視センサ1の回転方向加速度が1gとなるタイミングで、タイヤ監視センサ1が無線信号を送信するとしたが、これに限定されるものではない。車体側のアンテナをタイヤに近接した前記以外の車体部に設置し、タイヤ監視センサ1は、この車体側のアンテナに対向する位置で無線信号を送信することが可能である。
【0050】
図2に第一の実施形態であるタイヤ監視センサが備える送信方法のフローチャートを示す。ステップS1では、タイヤ監視センサ1の初期化がなされる。即ち、タイヤにタイヤ監視センサ1を取り付けた際に、感度調整や停車時の計測インターバル等の設定を行う。
【0051】
車両の停車時を想定するステップS2では、電源電池9の消耗を避けるために、計測頻度を抑える工夫がなされる。タイヤ監視センサ1は、例えば、1分間に、10秒の計測インターバルで回転方向加速度Ak(k=1〜6)の計測を時系列に行う。そして、ステップS3で、マイクロプロセッサー・ユニット6が、k+1回目の回転方向加速度Ak+1からk回目の回転方向加速度Akとの差Dk(Dk=Ak+1−Ak:k=1〜5)を算出し、前記差Dk(k=1〜5)の絶対値を第1の閾値(例えば、0.1g)と比較する。全ての差Dk(k=1〜5)の絶対値が第1の閾値以下である際には車両は停車していると判定し、スリープ・インターバル(休止期間)、本実施形態では例えば2分間を経てステップS2に戻る。この差Dk(k=1〜5)の絶対値に第1の閾値以上のものがある際には、車両が動き始めた(タイヤが回転を始めた)、または動いていると判定し、ステップS4に進む。
【0052】
車両が停止していると判定されるステップS2→ステップS3→ステップS2の繰り返しステップでは、無線信号は送信されない。また、スリープ・インターバル(休止期間)も設けられている。このことは、電源電池9の消耗を低減することに有効である。
【0053】
ステップS4で、回転方向加速度をより精度良くに計測するために、ステップS2より短い計測インターバル、例えば、0.05秒を設定し、ステップS5に進む。
【0054】
ステップS5においては、回転方向加速度を計測インターバル0.05秒で、例えば24回ほど計測し、ステップS6に進む。
【0055】
ステップS6において、時系列に計測されたステップS5の全ての回転方向加速度Ak(k=1〜24)に対し、k+1回目の回転方向加速度Ak+1からk回目の回転方向加速度Akとの差Dk(Dk=Ak+1−Ak:k=1〜23)を算出し、前記差Dk(k=1〜23)の絶対値の全てが第2の閾値(例えば、0.2g)以下であれば、ステップS5に戻る。そうでない際には、ステップS7に進む。
【0056】
車両の速度が遅くタイヤの一回転に数秒程度の時間が掛かり、24回の回転方向加速度の計測の全て(0.05秒×24回=1.2秒)がタイヤの半回転内でなされる際には、前記差(Dk:k=1〜23)の絶対値は0.083g(2g/24=0.083g)程度以下である。車両の速度が増して、24回の回転方向加速度の計測の全て(0.05秒×24回=1.2秒)がタイヤの1回転を越えてくると、前記差(Dk:k=1〜23)の絶対値は0.17g(2g/12=0.17g)より大きくなってくる。第2の閾値が0.2g(2g/10=0.2g)であることは、24回の回転方向加速度の計測が、タイヤの1回転(0g→1g→0g→−1g→0g)を跨ってなされ始めることを意味する。
【0057】
ところが、すでに車両が高速での走行中である際には、24回の回転方向加速度の計測の全て(0.05秒×24回=1.2秒)の内に、タイヤは2回以上の回転をしていることが想定される。
【0058】
ステップS7においては、ステップS6で算出された時系列なDk(Dk=Ak+1−Ak、tk:k=1〜23)を比較して、Dkが正から負に変わる時刻txとDkが負から正に変わる時刻tyとを抽出する。そして、最初にDkが正から負に変わる時刻txがある際には、次にあるDkが負から正に変わる時刻tyから最初にDkが正から負に変わる時刻txを差し引いた時間を6で割り、第一のサンプリング時間(Δt1)とする。そうではなく、最初にDkが負から正に変わる時刻tyがある際には、次にあるDkが正から負に変わる時刻txから最初にDkが負から正に変わる時刻tyを差し引いた時間を6で割り、第一のサンプリング時間(Δt1)とする。そして、ステップS8に進む。
【0059】
Dkが正から負に変わる時刻txと次にDkが負から正に変わる時刻tyと、またはDkが負から正に変わる時刻tyと次にDkが正から負に変わる時刻txとの間は、山と谷とのピークの間に相当するので半周期(タイヤの半回転)に相当する。この半周期を6で割った第一のサンプリング時間(Δt1)は、一周期を12で割った時間に相当する。
【0060】
本実施形態では、一周期を12分割としてサンプリング時間を算出したが、これに限定されるものではなく、任意の分割が可能である。また、サンプル時間(Δt)を等しい時間間隔で分割することは演算処理を簡潔にする。
【0061】
ステップS8において、ステップS7で算出した第一のサンプリング時間(Δt1)の間隔で時系列な時刻(tk)に、前後の計測値を比較しながら回転方向加速度を計測する。即ち、回転方向加速度の差Dk(Dk=Ak+1−Ak)が、計測を開始してから最初に負となり、次に前記Dkが3回以上に連続して正であり、次に前記Dkが3回以上に連続して負であり、次に前記Dkが3回以上に連続して正であることを時系列に経て、前記Dkが正から負に変わる計測点(k1)まで計測する。そして、前記正から負に変わる計測点(k1)の回転方向加速度とその時刻(Ak1、tk1)を第一のピーク(P1、t1)とする。そして、ステップS9に進む。
【0062】
前記では、次に正、負及び正がそれぞれ3回以上に連続して続いた後に、と述べたが、場合によっては、それぞれ1回も可能である。
【0063】
ステップS9において、ステップS8で時系列に計測した回転方向加速度に対して、計測値(第2の加速度)から6回前の計測値(第1の加速度)を差し引いた値と時刻との時系列な関係を、第一のピーク(P1、t1)から15遡った計測点まで算出する。即ち、Bk=Ak−Ak−6とtkとの関係を、k=k1−15〜k1の範囲で求める。ただし、k1は、第一のピーク(P1、t1)の計測点を意味する。
【0064】
ステップS10において、ステップS9で算出された時系列なBk=Ak−Ak−6、tk(k=k1−15〜k1)を比較して、Bkが増加し始める時刻tyからBkが減少し始める時刻txを差し引いた時間を6で割り、第二のサンプリング時間(Δt2)とする。Bkが増加し始める時刻tyは、図4の最小のピークに相当し、Bkが減少し始める時刻txは、図4の最初の最大ピークに相当する。
【0065】
差分Bk=Ak−Ak−6が減少し始める時刻txと差分Bkが増加し始める時刻tyとの時間差の絶対値は、タイヤの半回転に要する時間に相当する。
【0066】
1回目はステップS11を実行しないでステップS8に戻り、ステップS8で第二のサンプリング時間(Δt2)を用いて回転方向加速度の計測を行い第二のピーク(P2、t2)を算出する。ステップS9で、第二のピーク(P2、t2)からBk=Ak−Ak−6とtkとの時系列な関係を、k=k2−15〜k2の範囲で求める。ステップS10で第三のサンプリング時間(Δt3)を算出する。
【0067】
ステップS11において、回転方向加速度が1gである第二のピーク(P2、t2)の時刻t2に対し、第二のサンプリング時間Δt2の12倍の時間が経過した後に、即ちタイヤの一回転に相当する時間が経過した後に、次に回転方向加速度が1gとなるピークが来ると予想される。よって、タイヤ監視センサ1は、第二のピーク(P2、t2)の時刻t2に対してタイヤの一回転に相当する時間が経過した後に、即ち、t2+Δt2×12の時刻に無線信号を送信する。
【0068】
このように、ステップS8で第iのサンプリング時間(Δti)を用いて回転方向加速度の計測を行い第iのピーク(Pi、ti)を算出する。ステップS9でBk=Ak−Ak−6とtkとの時系列な関係を求め、ステップS10で第i+1のサンプリング時間(Δti+1)を算出する。そして、ステップS11で、タイヤ監視センサ1は、第iのピーク(Pi、ti)の時刻tiに対してタイヤの一回転に相当する時間が経過した後に、即ち、ti+Δti×12の時刻に無線信号を送信する。
【0069】
ステップS12で判定されて、前記の繰り返しが、所定の回数(n)まで繰り返される。
【0070】
ステップS5で、回転方向加速度を計測インターバル0.05秒で、例えば24回ほど計測がなされ、この計測値を用いてステップS6とステップS7で演算処理がなされる。計測頻度が24と多いのは、タイヤ監視センサ1の一周期の回転を正確に求めるためである。この24回の計測は、無線信号の送信とそのタイミングを算出するステップS8→ステップS9→ステップS10→ステップS11→ステップS12を繰り返し行うステップの前に、1回だけ行うように少なく抑えられている。また、この繰り返し行うステップでの計測頻度は12回と少なく抑えられている。このように、電源電池9の消耗を抑えている。
【0071】
そして、ステップS12で、所定の回数(n)繰り返したと判定されると、スリープ・インターバル(休止期間)、本実施形態では30分間程度を経てステップS2に戻る。このスリープ・インターバル(休止期間)を設けることで、電源電池9の消耗を低減している。
【0072】
図4に示すように、Bk=Ak−Ak−6の時系列な変化を、計測値であるAkの時系列な変化と比べると、時間に対する変化の周期は同じで、その値が略2倍になっている。Bkは差分であることからオフセット的な誤差は削除される。また、差分によってBkはAkの略2倍になっているが、差分によってノイズのようなランダムな誤差は2倍以下になる。よって、Bk=Ak−Ak−6の時系列な値からなるグラフは、計測値であるAkの時系列な値からなるグラフに対して、S/N比に優れる。
【0073】
よって、S/N比の良いBk=Ak−Ak−6の時系列な変化からは、サンプリング時間(Δti)及び1gとなるピーク(Pi、ti)を高精度に算出できるので、無線信号を送信するタイミング、即ち、ti+Δti×12を高精度に算出することが可能である。
【0074】
Bk=Ak−Ak−6のグラフは、Akから半周期前のAk−6を引いて得ているので、移動平均法では一定区間ごとに二つのAkを平均することに相当する。このように、二つのAkを使って、移動平均をすることを考えてみる。
【0075】
図5に示すように、Ak+1とAkを平均して、その値をAk+1に対応する時刻tk+1に割り与える(図5の+2点移動平均)と、元のグラフ(図5のAk波形)に比べて位相が先に進む。逆に、Ak+1とAkを平均して、その値をAkに対応する時刻tkに割り与える(図5の−2点移動平均)と、元のグラフに比べて位相が遅れる。位相のずれが起らないようにするためには、一定区間ごとに三つのAkを平均し、平均値を中央の時刻tkに割り与えることが必要である。このように、移動平均法では、本実施形態と同じように位相のずれが起らないようにするためには、最低でも処理するデータ量が1.5倍になる。ただし、図5は、回転方向加速度(g)とタイヤの回転角度(deg)との関係を示し、横軸の原点を回転方向加速度、即ち、計測値であるAkが0gである任意の点としている。
【0076】
本実施形態で位相ずれが起らない理由は、ほぼ同じ周期で変化する半周期程にずれたAkとAk−6との差分から時系列に変化するグラフ(Bk=Ak−Ak−6)を得ているからである。
【0077】
本実施形態では、第iのピーク(Pi、ti)の時刻tiに対し、次に、1周期が経過した後の回転方向加速度が1gとなるピークで、タイヤ監視センサ1が無線信号を送信するように設定したが、これに限定されるものではなく、2周期が経過した後、3周期が経過した後等も可能である。
【0078】
本実施形態では、第iのピーク(Pi、ti)の時刻tiに対し、次に、1周期が経過した後の回転方向加速が1gとなるピークを、第iのサンプリング時間(Δti)を用いて算出したが、これに限定されるものではなく、第i+1のサンプリング時間(Δti+1)を用いることも可能である。
【0079】
本実施形態では、ステップS12での判定を所定の回数(n)としたが、所定の時間に設定することもできる。所定の回数(n)を3にすると、例えば、タイヤの外径が25インチの車両が時速60km/hで走行している際には、所定の時間は1分程度に相当する。
【0080】
<第二の実施形態>
第二の実施形態は、図2のタイヤ監視センサ手法を示すフローチャートにおいて、第一の実施形態と、ステップS7とステップS10とが異なるが、他のステップは同じである。
【0081】
第二の実施形態のステップS7は、ステップS5で計測した全ての回転方向加速度Ak(k=1〜24)を第3の閾値及び第4の閾値と比較する。第3の閾値は、例えば、+0.9gであり、第4の閾値は、例えば、−0.9gである。Ak(k=1〜24)が+0.9gより大きい物と、Ak(k=1〜24)が−0.9gより小さい物を抽出する。そして、抽出した物を比較して、+0.9gより大きい物に対しては、時系列に連続している物がある際には、その内で最大な物を抽出する。抽出した物を比較して、−0.9gより小さい物に対しては、時系列に連続している物がある際には、その内で最小な物を抽出する。このようにして、ステップS5で計測した時系列なAk(k=1〜24)に対して、時系列に正のピークと負のピークを配列させることができる。そして、正のピークと負のピークとの隣り合うピークを抽出して、それらに対応する時刻の差を6で割り、その絶対値を求めて第一のサンプリング時間(Δt1)とする。
【0082】
正のピークと負のピークとの隣り合うピークが複数ある際に、それらに対応する時刻の差を6で割り、その絶対値を求める。そして、複数の前記絶対値の平均値を第一のサンプリング時間(Δt1)とすることも可能である。
【0083】
第二の実施形態のステップS10は、この15個の組み合わせ(Bk=Ak−Ak−6、tk:k=k1−15〜k1)に対して、15個の組み合わせの内の最後の三つを削除した組み合わせ、即ち、Bk(k1−15〜k1−3)の内から最大値(Bmax)と最小値(Bmin)を算出する。そして、最大値(Bmax)と最小値(Bmin)とに当たる時刻を差し引いた時間を6で割り、その絶対値を求めて第二のサンプリング時間(Δt2)とする。また、第二のサンプリング時間(Δt2)以降のサンプリング時間も、この方法で算出することができる。
【符号の説明】
【0084】
1 タイヤ監視センサ
2 圧力センサ
3 加速度センサ
4 送信機
5 ASIC
6 マイクロプロセッサー・ユニット
7 アンプ
8 アンテナ
9 電源電池
【特許請求の範囲】
【請求項1】
タイヤの加速度を検出する加速度センサと、
前記タイヤの空気圧を検出する圧力センサと、
前記タイヤの情報を送信する送信機と、
を有するタイヤ監視センサが備える送信方法であって、
前記タイヤが回転を始めたことを検知した後に、前記タイヤの半回転に要する時間を算出し、該時間をm分割した時間間隔で前記加速度を時系列に計測し、第2の加速度から半周期前に計測した第1の加速度を差し引いた差分を時系列に算出し、前記差分の時系列な変化から、前記送信機が前記タイヤの情報を送信するタイミングを算出することを特徴とするタイヤ監視センサが備える送信方法。
【請求項2】
前記m分割が、互いに等しい間隔をなす分割であることを特徴とする請求項1に記載のタイヤ監視センサが備える送信方法。
【請求項3】
前記タイヤの半回転に要する時間を、時系列に算出された前記差分が減少し始める時間と次に増加し始める時間との時間差の絶対値として算出することを特徴とする請求項1または請求項2に記載のタイヤ監視センサが備える送信方法。
【請求項4】
前記差分の時系列な変化から所定の加速度になる時間を算出し、該時間から前記タイヤの一回転に要する時間が経過した後に、前記送信機が前記タイヤの情報を送信することを特徴とする請求項1から請求項3のいずれか一項に記載のタイヤ監視センサが備える送信方法。
【請求項5】
所定の時間間隔で前記加速度センサの計測を繰り返し、第1の閾値以上の値が検知された際に前記タイヤが回転を始めたと判定することを特徴とする請求項1から請求項4のいずれか一項に記載のタイヤ監視センサが備える送信方法。
【請求項6】
タイヤの加速度を検出する加速度センサと、
前記タイヤの空気圧を検出する圧力センサと、
前記タイヤの情報を送信する送信機と、
を有し、
前記タイヤが回転を始めたことを検知した後に、前記タイヤの半回転に要する時間を算出し、該時間をm分割した時間間隔で前記加速度を時系列に計測し、第2の加速度から半周期前に計測した第1の加速度を差し引いた差分を時系列に算出し、前記差分の時系列な変化から、前記送信機が前記タイヤの情報を送信するタイミングを算出することを特徴とするタイヤ監視センサ。
【請求項7】
前記加速度センサが、一軸方向の加速度を検知することを特徴とする請求項6に記載のタイヤ監視センサ。
【請求項8】
タイヤの加速度を検出する加速度センサと、
前記タイヤの空気圧を検出する圧力センサと、
前記タイヤの情報を送信する送信機と、
を有するタイヤ監視センサが備えるプログラムであって、
前記タイヤが回転を始めたことを算出する手順と、
前記タイヤの半回転に要する時間を算出し、該時間をm分割した時間間隔で前記加速度を時系列に計測しサンプル時間を算出する手順と、
前記サンプル時間の間隔で計測された複数の加速度を用いて、第2の加速度から半周期前に計測した第1の加速度を差し引いた差分を時系列に算出する手順と、
前記差分の時系列な変化から、前記送信機が前記タイヤの情報を送信するタイミングを算出する手順と、
を実行することを特徴とするタイヤ監視センサが備えるプログラム。
【請求項1】
タイヤの加速度を検出する加速度センサと、
前記タイヤの空気圧を検出する圧力センサと、
前記タイヤの情報を送信する送信機と、
を有するタイヤ監視センサが備える送信方法であって、
前記タイヤが回転を始めたことを検知した後に、前記タイヤの半回転に要する時間を算出し、該時間をm分割した時間間隔で前記加速度を時系列に計測し、第2の加速度から半周期前に計測した第1の加速度を差し引いた差分を時系列に算出し、前記差分の時系列な変化から、前記送信機が前記タイヤの情報を送信するタイミングを算出することを特徴とするタイヤ監視センサが備える送信方法。
【請求項2】
前記m分割が、互いに等しい間隔をなす分割であることを特徴とする請求項1に記載のタイヤ監視センサが備える送信方法。
【請求項3】
前記タイヤの半回転に要する時間を、時系列に算出された前記差分が減少し始める時間と次に増加し始める時間との時間差の絶対値として算出することを特徴とする請求項1または請求項2に記載のタイヤ監視センサが備える送信方法。
【請求項4】
前記差分の時系列な変化から所定の加速度になる時間を算出し、該時間から前記タイヤの一回転に要する時間が経過した後に、前記送信機が前記タイヤの情報を送信することを特徴とする請求項1から請求項3のいずれか一項に記載のタイヤ監視センサが備える送信方法。
【請求項5】
所定の時間間隔で前記加速度センサの計測を繰り返し、第1の閾値以上の値が検知された際に前記タイヤが回転を始めたと判定することを特徴とする請求項1から請求項4のいずれか一項に記載のタイヤ監視センサが備える送信方法。
【請求項6】
タイヤの加速度を検出する加速度センサと、
前記タイヤの空気圧を検出する圧力センサと、
前記タイヤの情報を送信する送信機と、
を有し、
前記タイヤが回転を始めたことを検知した後に、前記タイヤの半回転に要する時間を算出し、該時間をm分割した時間間隔で前記加速度を時系列に計測し、第2の加速度から半周期前に計測した第1の加速度を差し引いた差分を時系列に算出し、前記差分の時系列な変化から、前記送信機が前記タイヤの情報を送信するタイミングを算出することを特徴とするタイヤ監視センサ。
【請求項7】
前記加速度センサが、一軸方向の加速度を検知することを特徴とする請求項6に記載のタイヤ監視センサ。
【請求項8】
タイヤの加速度を検出する加速度センサと、
前記タイヤの空気圧を検出する圧力センサと、
前記タイヤの情報を送信する送信機と、
を有するタイヤ監視センサが備えるプログラムであって、
前記タイヤが回転を始めたことを算出する手順と、
前記タイヤの半回転に要する時間を算出し、該時間をm分割した時間間隔で前記加速度を時系列に計測しサンプル時間を算出する手順と、
前記サンプル時間の間隔で計測された複数の加速度を用いて、第2の加速度から半周期前に計測した第1の加速度を差し引いた差分を時系列に算出する手順と、
前記差分の時系列な変化から、前記送信機が前記タイヤの情報を送信するタイミングを算出する手順と、
を実行することを特徴とするタイヤ監視センサが備えるプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−254678(P2012−254678A)
【公開日】平成24年12月27日(2012.12.27)
【国際特許分類】
【出願番号】特願2011−127800(P2011−127800)
【出願日】平成23年6月8日(2011.6.8)
【出願人】(000010098)アルプス電気株式会社 (4,263)
【Fターム(参考)】
【公開日】平成24年12月27日(2012.12.27)
【国際特許分類】
【出願日】平成23年6月8日(2011.6.8)
【出願人】(000010098)アルプス電気株式会社 (4,263)
【Fターム(参考)】
[ Back to top ]