
タイヤ空気圧測定装置、方法およびプログラム
【課題】正確にタイヤの空気圧を測定する技術の提供。
【解決手段】車両が備える車輪の回転数を示す情報の測定に誤差を生じさせる誤差要因を特定し、前記誤差要因に応じて前記車輪の回転数を示す情報の測定を行う測定区間を特定し、前記測定区間において前記車輪の回転数を示す情報を測定し、前記回転数を示す情報と前記車輪のタイヤの空気圧が基準気圧である状態で前記車両が前記測定区間を走行した場合の前記車輪の基準回転数を示す情報とを比較して前記タイヤの空気圧を測定する。
【解決手段】車両が備える車輪の回転数を示す情報の測定に誤差を生じさせる誤差要因を特定し、前記誤差要因に応じて前記車輪の回転数を示す情報の測定を行う測定区間を特定し、前記測定区間において前記車輪の回転数を示す情報を測定し、前記回転数を示す情報と前記車輪のタイヤの空気圧が基準気圧である状態で前記車両が前記測定区間を走行した場合の前記車輪の基準回転数を示す情報とを比較して前記タイヤの空気圧を測定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両が備える車輪のタイヤの空気圧を測定するタイヤ空気圧測定装置、方法およびプログラムに関する。
【背景技術】
【0002】
従来、ナビゲーション装置によって走行距離を測定し、また、車輪速センサによって各車輪の走行距離を測定し、ナビゲーション装置によって測定した走行距離と車輪速センサによって測定した各車輪の走行距離とから各車輪のタイヤの空気圧を検出する技術が知られている(例えば、特許文献1参照)。すなわち、特許文献1に開示された技術においては、ナビゲーション装置によって測定された走行距離と車輪速センサによって測定した各車輪の走行距離との差に基づいて各車輪の有効半径を特定し、車輪の有効半径に基づいてタイヤの空気圧の低下を検出している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平11−295190号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の技術においては、ナビゲーション装置によって測定された走行距離と車輪速センサによって測定した各車輪の走行距離との差に基づいて各車輪の有効半径を判定しているため、ナビゲーション装置によって測定された走行距離が各車輪の有効半径を特定するための基準となっている。しかし、ナビゲーション装置によって走行距離を測定する際には測定開始点および測定終了点における自車位置情報を特定する必要があり、ナビゲーション装置によって測定される走行距離は当該自車位置情報の特定誤差の影響を受けて誤差を含んだ値となり得る。従って、当該ナビゲーション装置によって測定される走行距離が各車輪の有効半径を判定するための正確な基準になるとは限らない。さらに、車輪速センサによる各車輪の走行距離の測定についても、路面の形状や車両の挙動の影響を受けて測定結果の安定性が変動し得る。しかし、従来の技術においては、以上のような誤差や車輪速センサによる測定の安定性の変動を考慮していないため、正確に車輪の有効半径を判定することはできない。
本発明は、上記課題にかんがみてなされたもので、正確にタイヤの空気圧を測定する技術の提供を目的とする。
【課題を解決するための手段】
【0005】
上記の目的を達成するため、本発明においては、車輪の回転数を示す情報の測定に誤差を生じさせる誤差要因に応じて測定区間を特定して当該車輪の回転数を示す情報を測定する。そして、当該測定された車輪の回転数を示す情報と、車輪のタイヤの空気圧が基準気圧である状態で車両が測定区間を走行した場合の車輪の基準回転数とを比較してタイヤの空気圧を測定する。すなわち、誤差要因が異なると、統計的に信頼するために充分な量の測定値を得るために走行すべき測定区間が異なるため、本発明においては誤差要因に応じた測定区間にて車輪の回転数を示す情報を測定して基準回転数と比較する構成とした。この結果、誤差要因に対応した測定区間における車輪の回転数の測定結果に基づいて車輪のタイヤの空気圧を測定することが可能になる。
【0006】
ここで、車輪の回転数を示す情報は、車輪の回転数と実質的に等価な情報であって当該情報と基準回転数を示す情報とを比較することでタイヤの空気圧を測定可能な情報であればよい。
【0007】
誤差要因特定手段は、車輪の回転数を示す情報の測定に誤差を生じさせる誤差要因を特定することができればよい。すなわち、同じ測定センサによって異なる場面で車輪の回転数を測定することを想定した場合、各場面において車両の外部の状況等が異なれば測定結果として得られる回転数が変動し、当該外部の状況等に応じて誤差の大きさも変動し得る。従って、車輪の回転数の測定結果を変動させる要因を誤差要因とすれば、誤差要因を特定して当該誤差要因に対応した測定区間を特定することで、誤差の程度に応じた測定区間を特定することが可能になる。なお、車輪の回転数は測定区間で測定されるため、測定区間を特定する以前に誤差要因が特定されている必要がある。従って、誤差要因は、車両が測定のための走行を開始する以前に発生可能性の有無を推定可能な要因であり、道路区間が特定されていなくても誤差が生じるか否かを推定可能な要因である。例えば、車両の周囲の環境が当該誤差要因の例として挙げられる。
【0008】
測定区間特定手段は、誤差要因に応じて測定区間を特定することができればよい。すなわち、誤差要因に対応する測定区間を特定することによって、誤差要因毎に統計的に信頼するために充分な量の測定値が異なるため、誤差要因に応じて測定区間を特定することにより、統計的に信頼するために充分な量の測定値を得るために適切な測定区間を選択できるように構成すればよい。
【0009】
回転数情報測定手段は、測定区間において車輪の回転数を示す情報を測定することができればよい。すなわち、車輪の回転数を直接的、あるいは間接的に示す信号を出力するセンサから当該信号を取得して車輪の回転数を示す情報を測定すればよい。
【0010】
空気圧測定手段は、測定した車輪の回転数を示す情報と、車輪の基準回転数を示す情報とを比較してタイヤの空気圧を測定することができればよい。すなわち、タイヤの空気圧が基準気圧である状態で測定区間を走行した場合の車輪の回転数は、予め特定することが可能であるため、その回転数を基準回転数として定義しておく。そして、当該基準回転数と測定した車輪の回転数とを比較すれば、車輪の回転数を測定した時点でのタイヤの空気圧を基準気圧との相対的な関係によって特定することができる。この構成によれば、誤差要因毎に適切な測定区間にて測定された車輪の回転数を示す情報に基づいて空気圧を測定することが可能であり、正確に空気圧を測定することが可能になる。
【0011】
なお、タイヤの空気圧の測定は、基準気圧との相対的な関係に基づく測定であれば良く、基準気圧との相対的な関係に基づいて空気圧の絶対値を測定する構成であっても良いし、基準気圧との比を測定する構成であっても良い。後者としては、例えば、タイヤの空気圧と基準気圧との比を測定し、当該比に基づいてタイヤの空気圧が基準状態から所定値以上減圧しているか否かを判定する構成等を採用可能である。
【0012】
さらに、誤差要因に応じて測定区間を特定するための構成として、誤差要因に対応する区間長を特定し、当該区間長以上の区間を測定区間として特定する構成を採用しても良い。この構成によれば、誤差要因に対応した誤差の程度に応じて測定区間の長さを特定することが可能になる。なお、ここで区間長は、各誤差要因に対応する程度の誤差が生じているとしても統計的に信頼するために充分な量の測定値を得ることが可能な道路区間の長さである。従って、区間長は、車輪の回転数を示す情報を測定するために必要な区間の長さの誤差要因毎の最小値に相当する。なお、区間長と誤差要因との対応関係は予め設定されていればよい。
【0013】
さらに、誤差の程度に応じた長さの区間長を特定する際に、誤差要因による誤差が大きいほど長くなるように区間長を特定する構成としても良い。すなわち、誤差が大きくなるほど区間長の長さが長くなるように設定しておき、誤差が大きくなるほど測定区間の長さが長くなるように設定する。この構成によれば、誤差が大きくなったとしても正確に空気圧を測定することが可能になる。
【0014】
さらに、誤差要因に対応する区間長に基づいて特定された測定区間に、車輪の回転数の測定結果を変動させるような形状の区間が含まれる場合に、当該測定区間を修正する構成としても良い。例えば、誤差要因に応じて特定された測定区間に曲率が所定値以下のカーブ区間が含まれる場合、車両から見てカーブ区間の曲率中心側に存在する車輪と、曲率中心の反対側に存在する車輪とで回転数に差異が生じる。また、誤差要因に応じて特定された測定区間に単位距離あたりの高度変化量が所定値以上の勾配区間が含まれる場合、車両の前方に存在する車輪と後方に存在する車輪とで回転数に差異が生じる。また、駆動輪と従動輪とで車輪の回転数に差異が生じやすくなる。そこで、誤差要因に応じて特定された測定区間にカーブ区間や勾配区間が含まれる場合に、上述の区間長よりも長くなるように測定区間を延長する構成とする。
【0015】
この構成によれば、上述の誤差要因が存在することに加え、測定区間の形状が車輪の回転数の測定結果を変動させ得る状況となっている場合に、統計的に信頼するために充分な量の測定値を得るために適切な測定区間を選択することができる。むろん、誤差要因に対応する区間長に基づいて特定された測定区間がカーブ区間や勾配区間を含む場合に、カーブ区間や勾配区間を含まない他の区間を選択して新たに測定区間を定義し直す構成としても良いが、上述のように測定区間を延長する構成によれば、当該測定区間にカーブ区間や勾配区間が含まれる状況であってもタイヤの空気圧を測定することが可能である。
【0016】
さらに、基準回転数を示す情報は、測定区間において実測された車輪の回転数を示す情報を解析する際の基準となれば良く、例えば、タイヤの空気圧が基準気圧である状態で車両にて実際に測定区間を走行し、当該測定区間内において車輪の回転数を示す情報を測定して基準回転数を示す情報としても良い。すなわち、基準となる基準回転数を示す情報も、実測された情報によって構成する。この構成によれば、基準となる情報を理論値によって特定する必要がないため、個々の車両に特有の測定傾向や測定区間毎の測定傾向を反映した状態で基準回転数を示す情報を定義することができる。
【0017】
さらに、本発明を、車両が備える撮像部によって撮影した画像に基づいて地物と車両との相対関係を特定し、当該相対関係に基づいて車輪の回転数の測定開始/測定終了タイミングを特定する構成に適用しても良い。すなわち、この構成においては、画像解析にて発生する誤差の程度が車両の外部の状況(例えば、時間帯や明るさ、天候等)によって変動するため、当該誤差の程度に影響を与える外部の状況は誤差要因となる。そこで、車両の外部の状況を示す情報を取得して誤差要因として特定し、特定した誤差要因に応じて測定区間の開始位置を特定する際の基準となる第1地物と測定区間の終了位置を特定する際の基準となる第2地物とを特定する。
【0018】
そして、測定区間における車輪の回転数の測定は、撮像部によって撮影した画像に基づいて特定される測定開始タイミングと測定終了タイミングとの間にて行われる。すなわち、撮像部によって撮影した第1地物の画像に基づいて特定される第1地物と車両との相対関係が所定の相対関係である場合に車輪の回転数を示す情報の測定を開始する。また、撮像部によって撮影した第2地物の画像に基づいて特定される第2地物と車両との相対関係が所定の相対関係である場合に車輪の回転数を示す情報の測定を終了する。この構成によれば、車両の外部の状況によって生じる地物と車両との相対関係の特定誤差の程度に応じて適切な測定区間を選択することができる。
【0019】
さらに、測定区間における車両の挙動は車輪の回転数の測定結果を変動させ得るが、車両の挙動が測定結果の安定性に過大な影響を与える挙動であった場合には空気圧の測定を行わない構成としても良い。例えば、車輪の回転数を示す情報が測定された場合の測定区間における車両の走行安定性が所定の基準より低い場合には空気圧の測定を行わない構成とする。すなわち、車輪の回転数を示す情報の測定結果の信頼性を低下させるほど車輪の走行安定性が低いか否かを予め設定された所定の基準に基づいて測定する。また、走行安定性が所定の基準より低いと判定された場合に空気圧の測定を行わない構成とすることで信頼性の低い状態で空気圧の測定を行うことを防止する。なお、車両の走行安定性は、走行中の車両の挙動の安定性を評価する指標であって、車輪の回転数の測定結果を変動させる度合いに対応した指標であれば良く、例えば、車両に作用する加速度や車速、角速度の大きさ、変化度合いであっても良いし、停止や車線変更の実施回数であっても良く、種々の指標を採用可能である。
【0020】
さらに、本発明のように誤差要因に対応した測定区間を設定し、当該測定区間にて測定した車輪の回転数を示す情報に基づいてタイヤの空気圧を測定する手法は、プログラムや方法としても適用可能である。また、以上のような装置、プログラム、方法は、単独の装置として実現される場合もあれば、車両に備えられる各部と共有の部品を利用して実現される場合もあり、各種の態様を含むものである。例えば、以上のような装置を備えたナビゲーション装置や方法、プログラムを提供することが可能である。また、一部がソフトウェアであり一部がハードウェアであったりするなど、適宜、変更可能である。さらに、装置を制御するプログラムの記録媒体としても発明は成立する。むろん、そのソフトウェアの記録媒体は、磁気記録媒体であってもよいし光磁気記録媒体であってもよいし、今後開発されるいかなる記録媒体においても全く同様に考えることができる。
【図面の簡単な説明】
【0021】
【図1】空気圧測定装置を含むナビゲーション装置のブロック図である。
【図2】空気圧測定定処理を示すフローチャートである。
【図3】測定区間特定処理を示すフローチャートである。
【図4】回転数情報取得処理を示すフローチャートである。
【図5】車両と地物とを模式的に示す図である。
【発明を実施するための形態】
【0022】
ここでは、下記の順序に従って本発明の実施の形態について説明する。
(1)ナビゲーション装置の構成:
(2)空気圧測定処理:
(2−1)測定区間特定処理:
(2−2)回転数情報取得処理:
(3)他の実施形態:
【0023】
(1)ナビゲーション装置の構成:
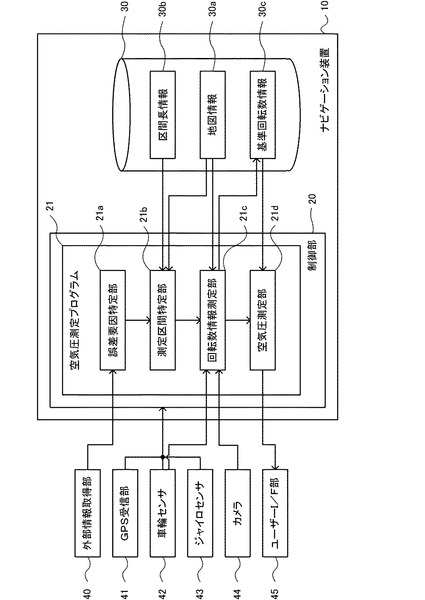
図1は、本発明にかかる空気圧測定装置を含むナビゲーション装置10の構成を示すブロック図である。ナビゲーション装置10は、CPU,RAM,ROM等を備える制御部20、記録媒体30を備えており、記録媒体30やROMに記憶されたプログラムを制御部20で実行することができる。本実施形態においては、このプログラムとして空気圧測定プログラム21を実行可能である。空気圧測定プログラム21は、制御部20がナビゲーション処理を実行している状態において実行され、ナビゲーション装置10が搭載された車両の車輪におけるタイヤの空気圧を測定する機能を備えている。
【0024】
本実施形態における車両は、外部情報取得部40とGPS受信部41と車輪センサ42とジャイロセンサ43とカメラ44とユーザーI/F部45とを備えており、各部と制御部20とが協働することによって空気圧測定プログラム21による機能を実現する。
【0025】
外部情報取得部40は、車両の外部の状況であって車輪センサ42の出力信号に基づく車輪の回転数の測定結果を変動させる誤差要因となる状況を示す外部情報を取得する装置である。本実施形態においては、後述するように、カメラ44による画像解析を用いて車両と地物との相対関係を特定して車輪センサ42の出力信号の取得開始タイミングと取得終了タイミングを特定する構成としている。そこで、当該画像解析によって地物と車両の位置との相対関係を特定する際の誤差に着目し、当該誤差の程度を変動させ得る車両の外部の明るさの程度を誤差要因としている。このため、本実施形態における外部情報取得部40は、車両の外部の明るさを測定する明るさセンサであり、図示しないインタフェースを介して車両の外部の明るさに対応した情報を出力する。制御部20は、この信号を取得して車両の外部の明るさを取得する。
【0026】
GPS受信部41は、GPS衛星からの電波を受信し、図示しないインタフェースを介して車両の現在位置を算出するための情報を出力する。制御部20は、この信号を取得して車両の現在位置を取得する。車輪センサ42は、車両が備える車輪の回転数に対応した信号を出力する。すなわち、車輪センサ42は、車輪が所定角度回転するたびにパルス信号を出力するように構成されており、制御部20は、図示しないインタフェースを介してこの信号を取得し、パルス信号の数に基づいて車輪の回転数を取得する。なお、制御部20は、単位時間あたりの車輪の回転数に基づいて車速を取得することもできる。ジャイロセンサ43は、車両に作用する角速度に対応した信号を出力する。制御部20は図示しないインタフェースを介してこの信号を取得し、車両の走行方向を取得する。車輪センサ42およびジャイロセンサ43は、GPS受信部41の出力信号から特定される車両の現在位置を補正するなどのために利用される。また、車両の現在位置は、当該車両の走行軌跡に基づいて適宜補正される。
【0027】
カメラ44は、車両の後方の道路を視野に含むように車両に対して取り付けられており、撮影した画像を示す画像データを出力する。制御部20は、図示しないインタフェースを介してこの画像データを取得して画像変換し、道路上の地物を検出して当該地物と車両との相対関係(距離および方向)を特定する。
【0028】
ユーザーI/F部45は、運転者の指示を入力し、また運転者に各種の情報を提供するためのインタフェース部であり、図示しないタッチパネルディスプレイやスイッチ、スピーカ等を備えている。制御部20は、ユーザーI/F部45に対して制御信号を出力することによって各種の案内を出力させる。
【0029】
空気圧測定プログラム21は車輪のタイヤの空気圧を測定する機能を実現するため、誤差要因特定部21aと測定区間特定部21bと回転数情報測定部21cと空気圧測定部21dとを備えている。また、記録媒体30には地図情報30a,区間長情報30bが予め記録されている。
【0030】
地図情報30aは、車両が走行する道路上に設定されたノードを示すノードデータ,ノード間の道路の形状を特定するための形状補間点データ,ノード同士の連結を示すリンクデータ,道路やその周辺に存在する地物(道路上の停止線や白線、横断歩道など)を示すデータ等を含んでいる。なお、本実施形態においては、上述のGPS受信部41,車輪センサ42,ジャイロセンサ43の出力信号に基づいて車両の現在位置を特定することが可能であるとともに、カメラ44が出力する画像データに基づいて地物と車両との相対関係を特定することが可能である。ここで、地物の位置は地図情報30aによって特定可能であるため、カメラ44が出力する画像データに基づいて地物と車両との相対関係が特定されると、実質的に車両の現在位置が特定されることになる。
【0031】
このように、本実施形態においては2種類の方法で車両の位置を特定可能であるが、現在の技術においてはGPS受信部41,車輪センサ42,ジャイロセンサ43の出力信号に基づく車両の現在位置の特定精度よりも、カメラ44が出力する画像データに基づく地物と車両との相対関係の特定精度の方が高精度である。従って、本実施形態においては、カメラ44が出力する画像データに基づいて地物と車両との相対関係を特定し、地物と車両とが特定の相対関係にある場合に車輪センサ42による車輪の回転数の測定を開始する構成としている。そして、このような相対的に高精度の手法で車両の位置を特定するとしても、やはり特定誤差が生じることは避けられず、しかも、車両の外部の状況に応じてその誤差は変動するため、本実施形態においては誤差要因毎に測定区間を特定することとしている。
【0032】
区間長情報30bは、当該誤差要因毎に測定区間を特定するために参照される情報であり、誤差要因と区間長との対応関係を示す情報である。なお、本実施形態において、区間長情報30bは、車両の外部の明るさと区間長との対応関係を示す情報である。また、本実施形態においては、誤差要因による誤差が大きいほど長い区間長となるように(すなわち、車両の外部の明るさが暗いほど長い区間長となるように)設定されている。さらに、当該誤差要因毎に設定された区間長は、誤差要因毎に車輪の回転数を示す情報を測定するために必要な区間の長さの最小値を示している。
【0033】
基準回転数情報30cは、車輪のタイヤの空気圧が基準気圧である状態で車両にて測定区間を走行した場合の車輪の回転数を示す情報であり、車輪のタイヤの空気圧が基準気圧である状態で車両にて測定区間を走行した後に、当該測定区間および当該測定区間を走行した時点における誤差要因に対応付けて記録媒体30に記録される。
【0034】
誤差要因特定部21aは、車輪の回転数を示す情報の測定に誤差を生じさせる誤差要因を特定する機能を制御部20に実現させるモジュールである。すなわち、制御部20は、誤差要因特定部21aの処理により、外部情報取得部40の出力情報に基づいて車両の外部の明るさを誤差要因として特定する。
【0035】
測定区間特定部21bは、誤差要因に応じて車輪の回転数を示す情報の測定を行う測定区間を特定する機能を制御部20に実現させるモジュールである。すなわち、制御部20は、測定区間特定部21bの処理により、区間長情報30bを参照し、誤差要因として特定された車両の外部の明るさに対応する区間長を特定する。そして、車両の前方に存在する道路の中から当該区間長以上の区間を測定区間として特定する。本実施形態において、制御部20は、測定区間の開始位置を特定する際の基準となる第1地物と、測定区間の終了位置を特定する際の基準となる第2地物とを特定することによって測定区間を規定する。すなわち、制御部20は、地図情報30aを参照して車両の前方に存在する道路上の複数の地物の位置を特定し、地物間の距離が区間長以上となる2カ所の地物を特定し、車両から近い方の地物を第1地物、遠い方の地物を第2地物とする。
【0036】
回転数情報測定部21cは、測定区間において車輪の回転数を示す情報を測定する機能を制御部20に実現させるモジュールである。すなわち、制御部20は、回転数情報測定部21cの処理により、地図情報30aが示す第1地物に到達する以前にカメラ44が出力する画像データの取得を開始し、当該画像データが示す特徴量から第1地物が画像に含まれるか否かを判定する。そして、当該第1地物の画像が一枚の画像の所定位置に到達した時点で当該第1地物と車両とが予め決められた所定の相対関係にあると判定し、車輪センサ42の出力信号に基づく回転数の測定を開始する。
【0037】
さらに、制御部20は、回転数情報測定部21cの処理により、カメラ44が出力する画像データの取得を続けるとともに、当該画像データが示す特徴量から第2地物が画像に含まれるか否かを判定する。そして、当該第2地物の画像が一枚の画像の所定位置に到達した時点で当該第2地物と車両とが予め決められた所定の相対関係にあると判定し、車輪センサ42の出力信号に基づく回転数の測定を終了する。
【0038】
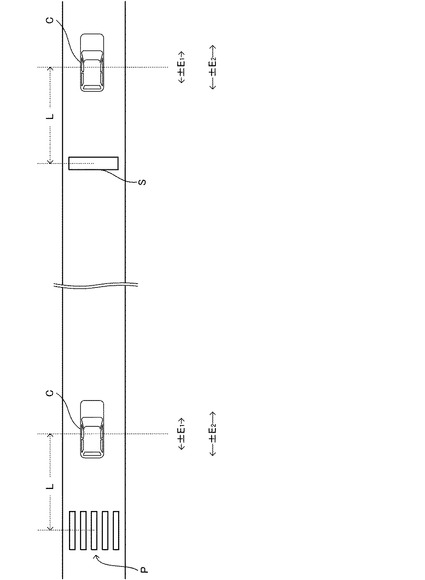
図5は、道路上を走行する車両Cと地物とを模式的に示す図である。同図5においては、横断歩道Pが測定区間の開始位置、停止線Sが測定区間の終了位置を規定する地物である。すなわち、本例において制御部20は、横断歩道Pを第1地物、停止線Sを第2地物とする。この例において、例えば、車両Cと地物との距離がLである場合に両者が所定の相対関係にあると定義されている場合、制御部20は、第1地物の画像に基づいて車両Cが横断歩道Pから距離Lに到達したと判定された時点で車輪センサ42の出力信号に基づく回転数の測定を開始する。また、制御部20は、第2地物の画像に基づいて車両Cが停止線Sから距離Lに到達したと判定された時点で車輪センサ42の出力信号に基づく回転数の測定を終了する。本実施形態においては、このようにして測定区間において測定された車輪の回転数を、現在のタイヤの空気圧を反映した車輪の回転数として取得する。
【0039】
空気圧測定部21dは、タイヤの空気圧を測定する機能を制御部20に実現させるモジュールである。すなわち、制御部20は、空気圧測定部21dの処理により、記録媒体30を参照して基準回転数情報30cが示す車輪の基準回転数を示す情報を取得し、現在のタイヤの空気圧を反映した車輪の回転数と基準回転数情報30cが示す車輪の基準回転数とを比較することによってタイヤの空気圧を測定する。なお、本実施形態においては、現在のタイヤの空気圧を反映した車輪の回転数と基準回転数との差分が所定の閾値以上である場合に、タイヤの空気圧が基準を下回る圧力となっている状態(減圧状態)であると判定する構成となっている。タイヤの空気圧が減圧状態であると判定された場合、制御部20は、ユーザーI/F部45に対して制御信号を出力して、タイヤの空気圧が減圧状態であることを示す情報を出力させる。
【0040】
以上の構成においては、車両の外部の明るさが暗いほど上述のカメラ44による画像解析の精度が低下し、地物と車両との相対関係を特定する際の精度が低下する。従って、当該相対関係の特定を利用して車輪の回転数の測定開始タイミングおよび測定終了タイミングを決定する構成における車輪の回転数の測定精度は車両の外部の明るさが暗くなるほど低下する。例えば、図5に示す例において、地物からの距離Lの特定精度の誤差が昼間において±E1となる場合に、夜間において±E2(E2>E1)となり、このような誤差に起因して車輪の回転数の測定精度は昼間よりも夜間の方が低下する。このように、地物と車両との相対関係を特定する際の精度は車両の外部の明るさに依存するが、カメラ44による画像解析は道路上の地物毎に個別に行われる処理であるため、地物間の距離、すなわち、測定区間の距離に依存しない。
【0041】
一方、車輪センサ42の出力信号は車輪が所定角度回転するたびに出力されるパルス信号であり、測定区間の距離が長くなるとほぼ比例して当該パルス信号の数は多くなる。タイヤの空気圧が基準気圧よりも低い減圧状態である場合にはタイヤの径が小さくなるため、減圧状態である場合の方が基準気圧である場合よりもパルス信号の数が多くなる。しかし、測定区間の距離とパルス信号の数との比例関係は維持されるため、タイヤの空気圧が減圧状態、基準気圧のいずれであっても測定区間の距離が長くなるとパルス信号の数は多くなる。従って、測定区間の距離が長くなるほどパルス信号に基づいて車輪の回転数を測定する際の統計精度は向上する。
【0042】
以上のように、車両の外部の明るさが暗くなると誤差の程度が大きくなるが、測定区間の距離を長く設定すれば、誤差の程度は維持したまま統計精度が向上することになる。そこで、本実施形態においては、区間長情報30bにおいて、上述のように、車両の外部の明るさが暗いほど長い区間長となるように設定しているため、車両の外部の明るさが暗いほど測定区間を長く設定されるように構成している。すなわち、本実施形態においては、車両の外部の明るさによって誤差の程度が増大したとしても、その誤差の増大程度を上回る程の統計精度を確保できるように区間長を設定してある。この結果、誤差要因に対応した区間長の測定区間にて車輪の回転数を測定して車輪のタイヤの空気圧を測定することが可能になり、誤差要因による誤差が変動したとしても高い精度で空気圧を測定することが可能である。
【0043】
(2)空気圧測定処理:
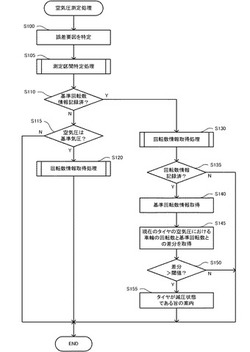
次に、本実施形態にかかる空気圧測定処理を詳細に説明する。図2は、空気圧測定処理を示すフローチャートであり、当該空気圧測定処理は車両が走行している過程において所定期間(例えば、100ms毎)に実行される。
【0044】
空気圧測定処理において、まず制御部20は、誤差要因特定部21aの処理により、誤差要因を特定する(ステップS100)。すなわち、制御部20は、外部情報取得部40の出力情報を取得して車両の外部の明るさを取得し、誤差要因として特定する。次に、制御部20は、測定区間特定部21bの処理により、測定区間特定処理を実行する(ステップS105)。すなわち、制御部20は、ステップS100にて取得した誤差要因に基づいて測定区間を特定する。
【0045】
(2−1)測定区間特定処理:
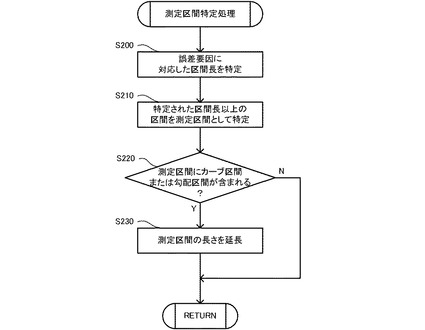
図3は、当該ステップS105における測定区間特定処理を示すフローチャートである。当該測定区間特定処理において、制御部20は、まず誤差要因に対応した区間長を特定する(ステップS200)。すなわち、制御部20は、区間長情報30bを参照して、誤差要因である車両の外部の明るさに対応する区間長を特定する。
【0046】
次に、制御部20は、特定された区間長以上の区間を測定区間として特定する(ステップS210)。すなわち、制御部20は、GPS受信部41,車輪センサ42,ジャイロセンサ43の出力信号に基づいて車両の現在位置を特定し、地図情報30aを参照して車両の前方に存在する2カ所の地物であって、地物間の距離が区間長以上となる地物を特定し、車両から近い方の地物を第1地物、遠い方の地物を第2地物とする。
【0047】
次に、制御部20は、測定区間にカーブ区間または勾配区間が含まれるか否かを判定し(ステップS220)、測定区間にカーブ区間または勾配区間が含まれると判定された場合には測定区間の長さを延長する(ステップS230)。すなわち、測定区間に、車輪の回転数の測定結果を変動させ得る形状の区間であるカーブ区間や勾配区間が含まれる場合、ステップS210にて特定された測定区間を修正する。具体的には、曲率が所定値以下のカーブ区間を車両にて走行すると、車両から見てカーブ区間の曲率中心側に存在する車輪と、曲率中心の反対側に存在する車輪とで回転数に差異が生じ、車輪の回転数の測定結果が変動し得る。また、単位距離あたりの高度変化量が所定量以上の勾配区間を車両にて走行すると、車両の前方に存在する車輪と後方に存在する車輪とで回転数に差異が生じ、車輪の回転数の測定結果が変動し得る。そこで、ステップS210にて特定された測定区間にカーブ区間や勾配区間が含まれる場合には、ステップS200にて特定された区間長よりも長くなるように測定区間を延長する構成とする。
【0048】
測定区間の延長は、例えば、上述の第2地物の位置よりも前方にある他の地物を選択することによって行われ、延長量はカーブ区間における曲率または勾配区間における勾配の程度に応じて特定される。すなわち、カーブ区間において車両に対して車輪の回転数の測定結果を変動させる加速度が作用する位置を特定することは困難であるが、カーブ区間における曲率が小さい(カーブが急である)ほど車輪の回転数の測定結果を変動させる可能性は高い。また、勾配区間における車輪の回転数の測定結果を変動させる加速度が作用する位置や凹凸の位置等を特定することは一般に困難であるが、勾配が急であるほど車輪の回転数の測定結果を変動させる可能性は高い。そこで、ここでも統計精度を高めるため、カーブ区間の曲率が所定値以下である場合と勾配区間における勾配の程度が所定値以上である場合には、測定区間の長さを曲率値や勾配の程度に対応付けられた所定の長さだけ延長する修正を行う。
【0049】
なお、曲率が過度に小さく、また、曲率の小さなカーブ区間の距離が過度に長くなる場合には、車輪の回転数の測定結果を過度に変動させるとみなして処理を中止しても良い。同様に、勾配の程度が過度に大きく、また、勾配の大きな勾配区間の距離が過度に長くなる場合に、車輪の回転数の測定結果を過度に変動させるとみなして処理を中止しても良い。また、この構成によれば、上述の誤差要因が存在することに加え、測定区間の形状が車輪の回転数の測定結果を変動させ得る状況となっている場合に、統計的に信頼するために充分な量の測定値を得るために適切な測定区間を選択することができる。この構成によれば、測定区間にカーブ区間や勾配区間が含まれる状況であってもタイヤの空気圧を測定することが可能である。
【0050】
以上の処理によって測定区間を特定すると、図2に示すフローチャートに復帰し、制御部20は、回転数情報測定部21cの処理により、記録媒体30に基準回転数情報30cが記録済であるか否かを判定する(ステップS110)。すなわち、制御部20は、ステップS100にて特定された誤差要因と同じ誤差要因(車両の外部の明るさが同等)について、ステップS105にて特定された測定区間に関する基準回転数情報30cが既に記録媒体30に記録済であるか否かを判定する。
【0051】
ステップS110において、記録媒体30に基準回転数情報30cが記録済であると判定されない場合、制御部20は、回転数情報測定部21cの処理により、現在のタイヤの空気圧が基準気圧であるか否かを判定する(ステップS115)。なお、現在のタイヤの空気圧が基準気圧であるか否かを判定するための構成は、種々の構成を採用可能である。例えば、メンテナンスによってタイヤの空気圧を基準気圧に設定した後に、当該基準気圧に設定したことをユーザー自身がユーザーI/F部45を操作することによって指示する構成を採用可能である。
【0052】
ステップS115にて、空気圧が基準気圧であると判定されない場合、制御部20は、ステップS120をスキップして処理を終了する。一方、ステップS115にて、空気圧が基準気圧であると判定された場合、制御部20は、回転数情報測定部21cの処理により、回転数情報取得処理を行う(ステップS120)。
【0053】
(2−2)回転数情報取得処理:
図4は、当該ステップS120における回転数情報取得処理を示すフローチャートである。当該回転数情報取得処理において、制御部20は、まず、第1地物と車両との相対関係が所定の相対関係であるか否かを判定する(ステップS300)。すなわち、制御部20は、GPS受信部41,車輪センサ42,ジャイロセンサ43の出力信号に基づいて車両の現在位置を特定し、地図情報30aを参照して第1地物の位置を特定する。そして、車両が第1地物の位置に到達する以前にカメラ44が出力する画像データの取得を開始し、当該画像データが示す特徴量から第1地物が画像に含まれるか否かを判定する。そして、当該第1地物の画像が一枚の画像の所定位置に到達した時点で当該第1地物と車両とが所定の相対関係にあると判定する。
【0054】
ステップS300にて、第1地物と車両との相対関係が所定の相対関係であると判定されない場合、ステップS305以降の処理をスキップする。一方、ステップS300にて、第1地物と車両との相対関係が所定の相対関係であると判定された場合、制御部20は、車輪の回転数の測定を開始する(ステップS305)。すなわち、制御部20は、車輪センサ42の出力信号を取得し、車輪の回転数に対応するパルス信号の数の測定を開始する。
【0055】
さらに、制御部20は、第2地物と車両との相対関係が所定の相対関係であるか否かを判定する(ステップS310)。すなわち、制御部20は、車輪の回転数の測定を続けるとともに、カメラ44が出力する画像データの解析を続け、当該画像データが示す特徴量から第2地物の画像が一枚の画像の所定位置に到達したか否かを判定することによって第2地物と車両とが所定の相対関係にあるか否かを判定する。ステップS310にて、第2地物と車両との相対関係が所定の相対関係であると判定された場合、制御部20は、車輪の回転数の測定を終了する(ステップS315)。
【0056】
さらに、本実施形態において、制御部20は、測定区間において車両が安定していたか否かを判定し(ステップS320)、車両が安定していたと判定された場合に記録媒体に回転数情報を記録する(ステップS325)。一方、ステップS320にて車両が安定していたと判定されない場合には、ステップS325をスキップして回転数情報を記録しないこととしている。すなわち、測定区間における車両の挙動は車輪の回転数の測定結果を変動させ得るが、車両の挙動が測定結果の安定性に過大な影響を与える挙動であった場合には回転数情報を記録しないこととし、後の処理で参照すべき回転数情報が記録されていない状態とすることで、車両の挙動が不安定であった場合には空気圧の測定を行わない構成としている。
【0057】
ここで、車両の走行安定性は種々の指標に基づいて特定可能である。例えば、単位時間あたりに車輪センサ42から出力されるパルス信号の数の変化や、ジャイロセンサ43の出力信号に基づいて特定される車両に作用する角速度の単位時間あたりの変化量等が車両の走行安定性を示す指標であるとみなすことが可能である。そして、当該指標が車両の挙動が所定の基準より不安定であることを示している場合には空気圧の測定を行わない構成とする。すなわち、車輪の回転数を示す情報の測定結果の信頼性を低下させるほど車両の走行安定性が低いか否かを予め設定された所定の基準に基づいて判定する。
【0058】
なお、以上の処理が上述のステップS120にて実施された場合、ステップS325において記録される回転数情報は基準回転数情報であり、測定区間および誤差要因に対応付けられて基準回転数情報30cとして記録媒体30に記録されることになる。従って、ステップS325を実施した後に図2に示す処理に復帰すると、それ以後、記録媒体30に基準回転数情報30cが記録されることになる。
【0059】
次に、ステップS110において、記録媒体30に基準回転数情報30cが記録済であると判定された場合について説明する。この場合、制御部20は、ステップS130以降において車両における現在のタイヤの空気圧を測定する処理を行う。まず、制御部20は、回転数情報測定部21cの処理により、回転数情報取得処理を実行する(ステップS130)。当該ステップS130にて実行する回転数情報取得処理も図4に示す処理であり処理内容は上述のステップS120における処理と同様であるが、ステップS130にて回転数情報取得処理が実行された場合に取得される回転数情報は現在のタイヤの空気圧における車輪の回転数を示す回転数情報であり、ステップS325においては当該回転数情報をRAMに記録する。
【0060】
次に、制御部20は、ステップS130における回転数情報取得処理によって、現在のタイヤの空気圧における車輪の回転数を示す回転数情報がRAMに記録済であるか否かを判定する(ステップS135)。ステップS135にて、現在のタイヤの空気圧における車輪の回転数を示す回転数情報がRAMに記録済であると判定されない場合、ステップS140以降の処理をスキップして処理を終了する。
【0061】
一方、ステップS135にて、現在のタイヤの空気圧における車輪の回転数を示す回転数情報がRAMに記録済であると判定された場合、制御部20は、空気圧測定部21dの処理により、記録媒体30を参照して基準回転数情報30cを取得する(ステップS140)。すなわち、ステップS100にて特定された誤差要因およびステップS105にて特定された測定区間に関する基準回転数情報30cを記録媒体30から取得してRAMに記録する。
【0062】
次に、制御部20は、RAMに記録された情報に基づいて、現在のタイヤの空気圧における車輪の回転数と基準回転数との差分を取得し(ステップS145)、当該差分が所定の閾値より大きいか否かを判定する(ステップS150)。そして、ステップS150にて差分が所定の閾値より大きいと判定された場合、制御部20は、空気圧測定部21dの処理により、ユーザーI/F部45に制御信号を出力してタイヤが減圧状態である旨の案内を実行する(ステップS155)。一方、ステップS150にて差分が所定の閾値より大きいと判定されない場合にはステップS155をスキップする。
【0063】
ここで、閾値は、上述の区間長に比例して閾値が大きくなるように設定されている。すなわち、タイヤの空気圧が減圧状態となっている場合の回転数とタイヤの空気圧が基準気圧である場合の回転数との差分は、空気圧が減圧状態になることによって増加した回転数の増加数であるが、車輪の回転数の測定に誤差が生じている場合には当該誤差の影響を受けた値となる。
【0064】
ここで、当該誤差の程度は誤差要因ごとに異なり、誤差要因による誤差の程度が大きくなると上述の差分に含まれる誤差の最大値も大きくなる。しかし、当該誤差の程度が大きくなった場合には、これに対応して区間長が長くなるように設定され、上述の閾値は当該区間長に比例して大きくなるように設定されている。従って、上述の差分と閾値を比較すれば、誤差要因による誤差が大きい場合であってもその誤差の影響を受けることなく、タイヤの空気圧が減圧しているか否かを判定することが可能になる。なお、ここでは、閾値が区間長に応じて設定されている例を説明したが、当該閾値は誤差要因毎に設定されていても良い。すなわち、誤差要因に対応する誤差の程度が大きくなるほど閾値が大きくなるように設定されていても良い。
【0065】
さらに、ステップS320において、測定区間における車両の安定性を判定し、車両の安定性に応じて回転数情報を記録する構成としているため、信頼性の低い状態で空気圧の測定を行うことを防止することができる。なお、車両の走行安定性を示す指標は、上述のようなパルス信号の数や角速度の他、車両に作用する加速度や車速の大きさ、変化度合いに基づいて定義しても良いし、車両が停止や車線変更を実施した回数であっても良く、種々の指標を採用可能である。
【0066】
(3)他の実施形態:
以上の実施形態は本発明を実施するための一例であり、誤差要因に対応した測定区間を設定し、当該測定区間にて測定した車輪の回転数を示す情報に基づいてタイヤの空気圧を測定する限りにおいて、他にも種々の実施形態を採用可能である。例えば、車輪の回転数を示す情報は、車輪の回転数と実質的に等価な情報であって当該情報と基準回転数を示す情報とを比較することでタイヤの空気圧を測定可能な情報であればよい。従って、車輪センサ42の出力信号のような所定回転角毎のパルス信号の他、車輪の回転数自体を示す情報を取得する構成であっても良いし、車輪の回転数を間接的に示す他の情報、例えば、車輪毎の走行距離を示す情報などであっても良い。
【0067】
また、本発明において、車輪の回転数は測定区間で測定されるため、測定区間を特定する以前に誤差要因が特定されている必要がある。従って、誤差要因は、車両が測定のための走行を開始する以前の時点で発生可能性の有無を推定可能な誤差に関する誤差要因であり、道路区間が特定されていなくても誤差が生じるか否かを推定可能な誤差に関する誤差要因である。このような誤差要因の例としては、車両の周囲の環境が挙げられ、上述のような車両の外部の明るさの他、車両の周囲の天候であっても良い。この場合、外部情報取得部40は車両の外部の天候を測定するセンサや天候情報を取得する通信部等によって構成される。
【0068】
さらに、タイヤの空気圧の測定は、基準気圧との相対的な関係に基づく測定であれば良く、減圧状態であることを判定する構成の他、基準気圧との相対的な関係に基づいて空気圧の絶対値を測定する構成であっても良いし、基準気圧との比を測定する構成であっても良い。
【0069】
さらに、誤差要因に対応した区間長以上の長さを確保可能な複数の区間を候補として選択し、当該候補の中から測定区間を選択してもよい。例えば、候補の中で、カーブ区間および勾配区間の数が少ない区間を測定区間として選択し、また、カーブ区間が存在した場合にその曲率ができるだけ小さいカーブ区間を含む測定区間を選択し、また、勾配区間が存在した場合にその高度変化ができるだけ小さい勾配区間を含む測定区間を選択する構成等を採用可能である。むろん、カーブ区間や勾配区間を含む区間を測定区間の候補としない構成としても良い。
【0070】
さらに、上述の実施形態においては、タイヤの空気圧が基準気圧である状態において、測定区間を選択して車輪の回転数を測定することによって基準回転数情報30cを取得していたが、任意の区間で基準回転数情報を測定しても良い。例えば、タイヤの空気圧が基準気圧である状態において、所定の期間において車輪の回転数を測定し、単位距離あたりの車輪の回転数を基準回転数情報とし、任意の測定区間の距離と基準回転数情報が示す回転数とを乗じた結果と、当該測定区間において測定された車輪の回転数とを比較する構成としてもよい。むろん、基準回転数情報をタイヤの空気圧が基準気圧である状態の理想他駅なタイヤの径から算出しても良い。
【符号の説明】
【0071】
10…ナビゲーション装置、20…制御部、21…空気圧測定プログラム、21a…誤差要因特定部、21b…測定区間特定部、21c…回転数情報測定部、21d…空気圧測定部、30…記録媒体、30a…地図情報、30b…区間長情報、30c…基準回転数情報、40…外部情報取得部、41…GPS受信部、42…車輪センサ、43…ジャイロセンサ、44…カメラ、45…ユーザーI/F部
【技術分野】
【0001】
本発明は、車両が備える車輪のタイヤの空気圧を測定するタイヤ空気圧測定装置、方法およびプログラムに関する。
【背景技術】
【0002】
従来、ナビゲーション装置によって走行距離を測定し、また、車輪速センサによって各車輪の走行距離を測定し、ナビゲーション装置によって測定した走行距離と車輪速センサによって測定した各車輪の走行距離とから各車輪のタイヤの空気圧を検出する技術が知られている(例えば、特許文献1参照)。すなわち、特許文献1に開示された技術においては、ナビゲーション装置によって測定された走行距離と車輪速センサによって測定した各車輪の走行距離との差に基づいて各車輪の有効半径を特定し、車輪の有効半径に基づいてタイヤの空気圧の低下を検出している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平11−295190号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の技術においては、ナビゲーション装置によって測定された走行距離と車輪速センサによって測定した各車輪の走行距離との差に基づいて各車輪の有効半径を判定しているため、ナビゲーション装置によって測定された走行距離が各車輪の有効半径を特定するための基準となっている。しかし、ナビゲーション装置によって走行距離を測定する際には測定開始点および測定終了点における自車位置情報を特定する必要があり、ナビゲーション装置によって測定される走行距離は当該自車位置情報の特定誤差の影響を受けて誤差を含んだ値となり得る。従って、当該ナビゲーション装置によって測定される走行距離が各車輪の有効半径を判定するための正確な基準になるとは限らない。さらに、車輪速センサによる各車輪の走行距離の測定についても、路面の形状や車両の挙動の影響を受けて測定結果の安定性が変動し得る。しかし、従来の技術においては、以上のような誤差や車輪速センサによる測定の安定性の変動を考慮していないため、正確に車輪の有効半径を判定することはできない。
本発明は、上記課題にかんがみてなされたもので、正確にタイヤの空気圧を測定する技術の提供を目的とする。
【課題を解決するための手段】
【0005】
上記の目的を達成するため、本発明においては、車輪の回転数を示す情報の測定に誤差を生じさせる誤差要因に応じて測定区間を特定して当該車輪の回転数を示す情報を測定する。そして、当該測定された車輪の回転数を示す情報と、車輪のタイヤの空気圧が基準気圧である状態で車両が測定区間を走行した場合の車輪の基準回転数とを比較してタイヤの空気圧を測定する。すなわち、誤差要因が異なると、統計的に信頼するために充分な量の測定値を得るために走行すべき測定区間が異なるため、本発明においては誤差要因に応じた測定区間にて車輪の回転数を示す情報を測定して基準回転数と比較する構成とした。この結果、誤差要因に対応した測定区間における車輪の回転数の測定結果に基づいて車輪のタイヤの空気圧を測定することが可能になる。
【0006】
ここで、車輪の回転数を示す情報は、車輪の回転数と実質的に等価な情報であって当該情報と基準回転数を示す情報とを比較することでタイヤの空気圧を測定可能な情報であればよい。
【0007】
誤差要因特定手段は、車輪の回転数を示す情報の測定に誤差を生じさせる誤差要因を特定することができればよい。すなわち、同じ測定センサによって異なる場面で車輪の回転数を測定することを想定した場合、各場面において車両の外部の状況等が異なれば測定結果として得られる回転数が変動し、当該外部の状況等に応じて誤差の大きさも変動し得る。従って、車輪の回転数の測定結果を変動させる要因を誤差要因とすれば、誤差要因を特定して当該誤差要因に対応した測定区間を特定することで、誤差の程度に応じた測定区間を特定することが可能になる。なお、車輪の回転数は測定区間で測定されるため、測定区間を特定する以前に誤差要因が特定されている必要がある。従って、誤差要因は、車両が測定のための走行を開始する以前に発生可能性の有無を推定可能な要因であり、道路区間が特定されていなくても誤差が生じるか否かを推定可能な要因である。例えば、車両の周囲の環境が当該誤差要因の例として挙げられる。
【0008】
測定区間特定手段は、誤差要因に応じて測定区間を特定することができればよい。すなわち、誤差要因に対応する測定区間を特定することによって、誤差要因毎に統計的に信頼するために充分な量の測定値が異なるため、誤差要因に応じて測定区間を特定することにより、統計的に信頼するために充分な量の測定値を得るために適切な測定区間を選択できるように構成すればよい。
【0009】
回転数情報測定手段は、測定区間において車輪の回転数を示す情報を測定することができればよい。すなわち、車輪の回転数を直接的、あるいは間接的に示す信号を出力するセンサから当該信号を取得して車輪の回転数を示す情報を測定すればよい。
【0010】
空気圧測定手段は、測定した車輪の回転数を示す情報と、車輪の基準回転数を示す情報とを比較してタイヤの空気圧を測定することができればよい。すなわち、タイヤの空気圧が基準気圧である状態で測定区間を走行した場合の車輪の回転数は、予め特定することが可能であるため、その回転数を基準回転数として定義しておく。そして、当該基準回転数と測定した車輪の回転数とを比較すれば、車輪の回転数を測定した時点でのタイヤの空気圧を基準気圧との相対的な関係によって特定することができる。この構成によれば、誤差要因毎に適切な測定区間にて測定された車輪の回転数を示す情報に基づいて空気圧を測定することが可能であり、正確に空気圧を測定することが可能になる。
【0011】
なお、タイヤの空気圧の測定は、基準気圧との相対的な関係に基づく測定であれば良く、基準気圧との相対的な関係に基づいて空気圧の絶対値を測定する構成であっても良いし、基準気圧との比を測定する構成であっても良い。後者としては、例えば、タイヤの空気圧と基準気圧との比を測定し、当該比に基づいてタイヤの空気圧が基準状態から所定値以上減圧しているか否かを判定する構成等を採用可能である。
【0012】
さらに、誤差要因に応じて測定区間を特定するための構成として、誤差要因に対応する区間長を特定し、当該区間長以上の区間を測定区間として特定する構成を採用しても良い。この構成によれば、誤差要因に対応した誤差の程度に応じて測定区間の長さを特定することが可能になる。なお、ここで区間長は、各誤差要因に対応する程度の誤差が生じているとしても統計的に信頼するために充分な量の測定値を得ることが可能な道路区間の長さである。従って、区間長は、車輪の回転数を示す情報を測定するために必要な区間の長さの誤差要因毎の最小値に相当する。なお、区間長と誤差要因との対応関係は予め設定されていればよい。
【0013】
さらに、誤差の程度に応じた長さの区間長を特定する際に、誤差要因による誤差が大きいほど長くなるように区間長を特定する構成としても良い。すなわち、誤差が大きくなるほど区間長の長さが長くなるように設定しておき、誤差が大きくなるほど測定区間の長さが長くなるように設定する。この構成によれば、誤差が大きくなったとしても正確に空気圧を測定することが可能になる。
【0014】
さらに、誤差要因に対応する区間長に基づいて特定された測定区間に、車輪の回転数の測定結果を変動させるような形状の区間が含まれる場合に、当該測定区間を修正する構成としても良い。例えば、誤差要因に応じて特定された測定区間に曲率が所定値以下のカーブ区間が含まれる場合、車両から見てカーブ区間の曲率中心側に存在する車輪と、曲率中心の反対側に存在する車輪とで回転数に差異が生じる。また、誤差要因に応じて特定された測定区間に単位距離あたりの高度変化量が所定値以上の勾配区間が含まれる場合、車両の前方に存在する車輪と後方に存在する車輪とで回転数に差異が生じる。また、駆動輪と従動輪とで車輪の回転数に差異が生じやすくなる。そこで、誤差要因に応じて特定された測定区間にカーブ区間や勾配区間が含まれる場合に、上述の区間長よりも長くなるように測定区間を延長する構成とする。
【0015】
この構成によれば、上述の誤差要因が存在することに加え、測定区間の形状が車輪の回転数の測定結果を変動させ得る状況となっている場合に、統計的に信頼するために充分な量の測定値を得るために適切な測定区間を選択することができる。むろん、誤差要因に対応する区間長に基づいて特定された測定区間がカーブ区間や勾配区間を含む場合に、カーブ区間や勾配区間を含まない他の区間を選択して新たに測定区間を定義し直す構成としても良いが、上述のように測定区間を延長する構成によれば、当該測定区間にカーブ区間や勾配区間が含まれる状況であってもタイヤの空気圧を測定することが可能である。
【0016】
さらに、基準回転数を示す情報は、測定区間において実測された車輪の回転数を示す情報を解析する際の基準となれば良く、例えば、タイヤの空気圧が基準気圧である状態で車両にて実際に測定区間を走行し、当該測定区間内において車輪の回転数を示す情報を測定して基準回転数を示す情報としても良い。すなわち、基準となる基準回転数を示す情報も、実測された情報によって構成する。この構成によれば、基準となる情報を理論値によって特定する必要がないため、個々の車両に特有の測定傾向や測定区間毎の測定傾向を反映した状態で基準回転数を示す情報を定義することができる。
【0017】
さらに、本発明を、車両が備える撮像部によって撮影した画像に基づいて地物と車両との相対関係を特定し、当該相対関係に基づいて車輪の回転数の測定開始/測定終了タイミングを特定する構成に適用しても良い。すなわち、この構成においては、画像解析にて発生する誤差の程度が車両の外部の状況(例えば、時間帯や明るさ、天候等)によって変動するため、当該誤差の程度に影響を与える外部の状況は誤差要因となる。そこで、車両の外部の状況を示す情報を取得して誤差要因として特定し、特定した誤差要因に応じて測定区間の開始位置を特定する際の基準となる第1地物と測定区間の終了位置を特定する際の基準となる第2地物とを特定する。
【0018】
そして、測定区間における車輪の回転数の測定は、撮像部によって撮影した画像に基づいて特定される測定開始タイミングと測定終了タイミングとの間にて行われる。すなわち、撮像部によって撮影した第1地物の画像に基づいて特定される第1地物と車両との相対関係が所定の相対関係である場合に車輪の回転数を示す情報の測定を開始する。また、撮像部によって撮影した第2地物の画像に基づいて特定される第2地物と車両との相対関係が所定の相対関係である場合に車輪の回転数を示す情報の測定を終了する。この構成によれば、車両の外部の状況によって生じる地物と車両との相対関係の特定誤差の程度に応じて適切な測定区間を選択することができる。
【0019】
さらに、測定区間における車両の挙動は車輪の回転数の測定結果を変動させ得るが、車両の挙動が測定結果の安定性に過大な影響を与える挙動であった場合には空気圧の測定を行わない構成としても良い。例えば、車輪の回転数を示す情報が測定された場合の測定区間における車両の走行安定性が所定の基準より低い場合には空気圧の測定を行わない構成とする。すなわち、車輪の回転数を示す情報の測定結果の信頼性を低下させるほど車輪の走行安定性が低いか否かを予め設定された所定の基準に基づいて測定する。また、走行安定性が所定の基準より低いと判定された場合に空気圧の測定を行わない構成とすることで信頼性の低い状態で空気圧の測定を行うことを防止する。なお、車両の走行安定性は、走行中の車両の挙動の安定性を評価する指標であって、車輪の回転数の測定結果を変動させる度合いに対応した指標であれば良く、例えば、車両に作用する加速度や車速、角速度の大きさ、変化度合いであっても良いし、停止や車線変更の実施回数であっても良く、種々の指標を採用可能である。
【0020】
さらに、本発明のように誤差要因に対応した測定区間を設定し、当該測定区間にて測定した車輪の回転数を示す情報に基づいてタイヤの空気圧を測定する手法は、プログラムや方法としても適用可能である。また、以上のような装置、プログラム、方法は、単独の装置として実現される場合もあれば、車両に備えられる各部と共有の部品を利用して実現される場合もあり、各種の態様を含むものである。例えば、以上のような装置を備えたナビゲーション装置や方法、プログラムを提供することが可能である。また、一部がソフトウェアであり一部がハードウェアであったりするなど、適宜、変更可能である。さらに、装置を制御するプログラムの記録媒体としても発明は成立する。むろん、そのソフトウェアの記録媒体は、磁気記録媒体であってもよいし光磁気記録媒体であってもよいし、今後開発されるいかなる記録媒体においても全く同様に考えることができる。
【図面の簡単な説明】
【0021】
【図1】空気圧測定装置を含むナビゲーション装置のブロック図である。
【図2】空気圧測定定処理を示すフローチャートである。
【図3】測定区間特定処理を示すフローチャートである。
【図4】回転数情報取得処理を示すフローチャートである。
【図5】車両と地物とを模式的に示す図である。
【発明を実施するための形態】
【0022】
ここでは、下記の順序に従って本発明の実施の形態について説明する。
(1)ナビゲーション装置の構成:
(2)空気圧測定処理:
(2−1)測定区間特定処理:
(2−2)回転数情報取得処理:
(3)他の実施形態:
【0023】
(1)ナビゲーション装置の構成:
図1は、本発明にかかる空気圧測定装置を含むナビゲーション装置10の構成を示すブロック図である。ナビゲーション装置10は、CPU,RAM,ROM等を備える制御部20、記録媒体30を備えており、記録媒体30やROMに記憶されたプログラムを制御部20で実行することができる。本実施形態においては、このプログラムとして空気圧測定プログラム21を実行可能である。空気圧測定プログラム21は、制御部20がナビゲーション処理を実行している状態において実行され、ナビゲーション装置10が搭載された車両の車輪におけるタイヤの空気圧を測定する機能を備えている。
【0024】
本実施形態における車両は、外部情報取得部40とGPS受信部41と車輪センサ42とジャイロセンサ43とカメラ44とユーザーI/F部45とを備えており、各部と制御部20とが協働することによって空気圧測定プログラム21による機能を実現する。
【0025】
外部情報取得部40は、車両の外部の状況であって車輪センサ42の出力信号に基づく車輪の回転数の測定結果を変動させる誤差要因となる状況を示す外部情報を取得する装置である。本実施形態においては、後述するように、カメラ44による画像解析を用いて車両と地物との相対関係を特定して車輪センサ42の出力信号の取得開始タイミングと取得終了タイミングを特定する構成としている。そこで、当該画像解析によって地物と車両の位置との相対関係を特定する際の誤差に着目し、当該誤差の程度を変動させ得る車両の外部の明るさの程度を誤差要因としている。このため、本実施形態における外部情報取得部40は、車両の外部の明るさを測定する明るさセンサであり、図示しないインタフェースを介して車両の外部の明るさに対応した情報を出力する。制御部20は、この信号を取得して車両の外部の明るさを取得する。
【0026】
GPS受信部41は、GPS衛星からの電波を受信し、図示しないインタフェースを介して車両の現在位置を算出するための情報を出力する。制御部20は、この信号を取得して車両の現在位置を取得する。車輪センサ42は、車両が備える車輪の回転数に対応した信号を出力する。すなわち、車輪センサ42は、車輪が所定角度回転するたびにパルス信号を出力するように構成されており、制御部20は、図示しないインタフェースを介してこの信号を取得し、パルス信号の数に基づいて車輪の回転数を取得する。なお、制御部20は、単位時間あたりの車輪の回転数に基づいて車速を取得することもできる。ジャイロセンサ43は、車両に作用する角速度に対応した信号を出力する。制御部20は図示しないインタフェースを介してこの信号を取得し、車両の走行方向を取得する。車輪センサ42およびジャイロセンサ43は、GPS受信部41の出力信号から特定される車両の現在位置を補正するなどのために利用される。また、車両の現在位置は、当該車両の走行軌跡に基づいて適宜補正される。
【0027】
カメラ44は、車両の後方の道路を視野に含むように車両に対して取り付けられており、撮影した画像を示す画像データを出力する。制御部20は、図示しないインタフェースを介してこの画像データを取得して画像変換し、道路上の地物を検出して当該地物と車両との相対関係(距離および方向)を特定する。
【0028】
ユーザーI/F部45は、運転者の指示を入力し、また運転者に各種の情報を提供するためのインタフェース部であり、図示しないタッチパネルディスプレイやスイッチ、スピーカ等を備えている。制御部20は、ユーザーI/F部45に対して制御信号を出力することによって各種の案内を出力させる。
【0029】
空気圧測定プログラム21は車輪のタイヤの空気圧を測定する機能を実現するため、誤差要因特定部21aと測定区間特定部21bと回転数情報測定部21cと空気圧測定部21dとを備えている。また、記録媒体30には地図情報30a,区間長情報30bが予め記録されている。
【0030】
地図情報30aは、車両が走行する道路上に設定されたノードを示すノードデータ,ノード間の道路の形状を特定するための形状補間点データ,ノード同士の連結を示すリンクデータ,道路やその周辺に存在する地物(道路上の停止線や白線、横断歩道など)を示すデータ等を含んでいる。なお、本実施形態においては、上述のGPS受信部41,車輪センサ42,ジャイロセンサ43の出力信号に基づいて車両の現在位置を特定することが可能であるとともに、カメラ44が出力する画像データに基づいて地物と車両との相対関係を特定することが可能である。ここで、地物の位置は地図情報30aによって特定可能であるため、カメラ44が出力する画像データに基づいて地物と車両との相対関係が特定されると、実質的に車両の現在位置が特定されることになる。
【0031】
このように、本実施形態においては2種類の方法で車両の位置を特定可能であるが、現在の技術においてはGPS受信部41,車輪センサ42,ジャイロセンサ43の出力信号に基づく車両の現在位置の特定精度よりも、カメラ44が出力する画像データに基づく地物と車両との相対関係の特定精度の方が高精度である。従って、本実施形態においては、カメラ44が出力する画像データに基づいて地物と車両との相対関係を特定し、地物と車両とが特定の相対関係にある場合に車輪センサ42による車輪の回転数の測定を開始する構成としている。そして、このような相対的に高精度の手法で車両の位置を特定するとしても、やはり特定誤差が生じることは避けられず、しかも、車両の外部の状況に応じてその誤差は変動するため、本実施形態においては誤差要因毎に測定区間を特定することとしている。
【0032】
区間長情報30bは、当該誤差要因毎に測定区間を特定するために参照される情報であり、誤差要因と区間長との対応関係を示す情報である。なお、本実施形態において、区間長情報30bは、車両の外部の明るさと区間長との対応関係を示す情報である。また、本実施形態においては、誤差要因による誤差が大きいほど長い区間長となるように(すなわち、車両の外部の明るさが暗いほど長い区間長となるように)設定されている。さらに、当該誤差要因毎に設定された区間長は、誤差要因毎に車輪の回転数を示す情報を測定するために必要な区間の長さの最小値を示している。
【0033】
基準回転数情報30cは、車輪のタイヤの空気圧が基準気圧である状態で車両にて測定区間を走行した場合の車輪の回転数を示す情報であり、車輪のタイヤの空気圧が基準気圧である状態で車両にて測定区間を走行した後に、当該測定区間および当該測定区間を走行した時点における誤差要因に対応付けて記録媒体30に記録される。
【0034】
誤差要因特定部21aは、車輪の回転数を示す情報の測定に誤差を生じさせる誤差要因を特定する機能を制御部20に実現させるモジュールである。すなわち、制御部20は、誤差要因特定部21aの処理により、外部情報取得部40の出力情報に基づいて車両の外部の明るさを誤差要因として特定する。
【0035】
測定区間特定部21bは、誤差要因に応じて車輪の回転数を示す情報の測定を行う測定区間を特定する機能を制御部20に実現させるモジュールである。すなわち、制御部20は、測定区間特定部21bの処理により、区間長情報30bを参照し、誤差要因として特定された車両の外部の明るさに対応する区間長を特定する。そして、車両の前方に存在する道路の中から当該区間長以上の区間を測定区間として特定する。本実施形態において、制御部20は、測定区間の開始位置を特定する際の基準となる第1地物と、測定区間の終了位置を特定する際の基準となる第2地物とを特定することによって測定区間を規定する。すなわち、制御部20は、地図情報30aを参照して車両の前方に存在する道路上の複数の地物の位置を特定し、地物間の距離が区間長以上となる2カ所の地物を特定し、車両から近い方の地物を第1地物、遠い方の地物を第2地物とする。
【0036】
回転数情報測定部21cは、測定区間において車輪の回転数を示す情報を測定する機能を制御部20に実現させるモジュールである。すなわち、制御部20は、回転数情報測定部21cの処理により、地図情報30aが示す第1地物に到達する以前にカメラ44が出力する画像データの取得を開始し、当該画像データが示す特徴量から第1地物が画像に含まれるか否かを判定する。そして、当該第1地物の画像が一枚の画像の所定位置に到達した時点で当該第1地物と車両とが予め決められた所定の相対関係にあると判定し、車輪センサ42の出力信号に基づく回転数の測定を開始する。
【0037】
さらに、制御部20は、回転数情報測定部21cの処理により、カメラ44が出力する画像データの取得を続けるとともに、当該画像データが示す特徴量から第2地物が画像に含まれるか否かを判定する。そして、当該第2地物の画像が一枚の画像の所定位置に到達した時点で当該第2地物と車両とが予め決められた所定の相対関係にあると判定し、車輪センサ42の出力信号に基づく回転数の測定を終了する。
【0038】
図5は、道路上を走行する車両Cと地物とを模式的に示す図である。同図5においては、横断歩道Pが測定区間の開始位置、停止線Sが測定区間の終了位置を規定する地物である。すなわち、本例において制御部20は、横断歩道Pを第1地物、停止線Sを第2地物とする。この例において、例えば、車両Cと地物との距離がLである場合に両者が所定の相対関係にあると定義されている場合、制御部20は、第1地物の画像に基づいて車両Cが横断歩道Pから距離Lに到達したと判定された時点で車輪センサ42の出力信号に基づく回転数の測定を開始する。また、制御部20は、第2地物の画像に基づいて車両Cが停止線Sから距離Lに到達したと判定された時点で車輪センサ42の出力信号に基づく回転数の測定を終了する。本実施形態においては、このようにして測定区間において測定された車輪の回転数を、現在のタイヤの空気圧を反映した車輪の回転数として取得する。
【0039】
空気圧測定部21dは、タイヤの空気圧を測定する機能を制御部20に実現させるモジュールである。すなわち、制御部20は、空気圧測定部21dの処理により、記録媒体30を参照して基準回転数情報30cが示す車輪の基準回転数を示す情報を取得し、現在のタイヤの空気圧を反映した車輪の回転数と基準回転数情報30cが示す車輪の基準回転数とを比較することによってタイヤの空気圧を測定する。なお、本実施形態においては、現在のタイヤの空気圧を反映した車輪の回転数と基準回転数との差分が所定の閾値以上である場合に、タイヤの空気圧が基準を下回る圧力となっている状態(減圧状態)であると判定する構成となっている。タイヤの空気圧が減圧状態であると判定された場合、制御部20は、ユーザーI/F部45に対して制御信号を出力して、タイヤの空気圧が減圧状態であることを示す情報を出力させる。
【0040】
以上の構成においては、車両の外部の明るさが暗いほど上述のカメラ44による画像解析の精度が低下し、地物と車両との相対関係を特定する際の精度が低下する。従って、当該相対関係の特定を利用して車輪の回転数の測定開始タイミングおよび測定終了タイミングを決定する構成における車輪の回転数の測定精度は車両の外部の明るさが暗くなるほど低下する。例えば、図5に示す例において、地物からの距離Lの特定精度の誤差が昼間において±E1となる場合に、夜間において±E2(E2>E1)となり、このような誤差に起因して車輪の回転数の測定精度は昼間よりも夜間の方が低下する。このように、地物と車両との相対関係を特定する際の精度は車両の外部の明るさに依存するが、カメラ44による画像解析は道路上の地物毎に個別に行われる処理であるため、地物間の距離、すなわち、測定区間の距離に依存しない。
【0041】
一方、車輪センサ42の出力信号は車輪が所定角度回転するたびに出力されるパルス信号であり、測定区間の距離が長くなるとほぼ比例して当該パルス信号の数は多くなる。タイヤの空気圧が基準気圧よりも低い減圧状態である場合にはタイヤの径が小さくなるため、減圧状態である場合の方が基準気圧である場合よりもパルス信号の数が多くなる。しかし、測定区間の距離とパルス信号の数との比例関係は維持されるため、タイヤの空気圧が減圧状態、基準気圧のいずれであっても測定区間の距離が長くなるとパルス信号の数は多くなる。従って、測定区間の距離が長くなるほどパルス信号に基づいて車輪の回転数を測定する際の統計精度は向上する。
【0042】
以上のように、車両の外部の明るさが暗くなると誤差の程度が大きくなるが、測定区間の距離を長く設定すれば、誤差の程度は維持したまま統計精度が向上することになる。そこで、本実施形態においては、区間長情報30bにおいて、上述のように、車両の外部の明るさが暗いほど長い区間長となるように設定しているため、車両の外部の明るさが暗いほど測定区間を長く設定されるように構成している。すなわち、本実施形態においては、車両の外部の明るさによって誤差の程度が増大したとしても、その誤差の増大程度を上回る程の統計精度を確保できるように区間長を設定してある。この結果、誤差要因に対応した区間長の測定区間にて車輪の回転数を測定して車輪のタイヤの空気圧を測定することが可能になり、誤差要因による誤差が変動したとしても高い精度で空気圧を測定することが可能である。
【0043】
(2)空気圧測定処理:
次に、本実施形態にかかる空気圧測定処理を詳細に説明する。図2は、空気圧測定処理を示すフローチャートであり、当該空気圧測定処理は車両が走行している過程において所定期間(例えば、100ms毎)に実行される。
【0044】
空気圧測定処理において、まず制御部20は、誤差要因特定部21aの処理により、誤差要因を特定する(ステップS100)。すなわち、制御部20は、外部情報取得部40の出力情報を取得して車両の外部の明るさを取得し、誤差要因として特定する。次に、制御部20は、測定区間特定部21bの処理により、測定区間特定処理を実行する(ステップS105)。すなわち、制御部20は、ステップS100にて取得した誤差要因に基づいて測定区間を特定する。
【0045】
(2−1)測定区間特定処理:
図3は、当該ステップS105における測定区間特定処理を示すフローチャートである。当該測定区間特定処理において、制御部20は、まず誤差要因に対応した区間長を特定する(ステップS200)。すなわち、制御部20は、区間長情報30bを参照して、誤差要因である車両の外部の明るさに対応する区間長を特定する。
【0046】
次に、制御部20は、特定された区間長以上の区間を測定区間として特定する(ステップS210)。すなわち、制御部20は、GPS受信部41,車輪センサ42,ジャイロセンサ43の出力信号に基づいて車両の現在位置を特定し、地図情報30aを参照して車両の前方に存在する2カ所の地物であって、地物間の距離が区間長以上となる地物を特定し、車両から近い方の地物を第1地物、遠い方の地物を第2地物とする。
【0047】
次に、制御部20は、測定区間にカーブ区間または勾配区間が含まれるか否かを判定し(ステップS220)、測定区間にカーブ区間または勾配区間が含まれると判定された場合には測定区間の長さを延長する(ステップS230)。すなわち、測定区間に、車輪の回転数の測定結果を変動させ得る形状の区間であるカーブ区間や勾配区間が含まれる場合、ステップS210にて特定された測定区間を修正する。具体的には、曲率が所定値以下のカーブ区間を車両にて走行すると、車両から見てカーブ区間の曲率中心側に存在する車輪と、曲率中心の反対側に存在する車輪とで回転数に差異が生じ、車輪の回転数の測定結果が変動し得る。また、単位距離あたりの高度変化量が所定量以上の勾配区間を車両にて走行すると、車両の前方に存在する車輪と後方に存在する車輪とで回転数に差異が生じ、車輪の回転数の測定結果が変動し得る。そこで、ステップS210にて特定された測定区間にカーブ区間や勾配区間が含まれる場合には、ステップS200にて特定された区間長よりも長くなるように測定区間を延長する構成とする。
【0048】
測定区間の延長は、例えば、上述の第2地物の位置よりも前方にある他の地物を選択することによって行われ、延長量はカーブ区間における曲率または勾配区間における勾配の程度に応じて特定される。すなわち、カーブ区間において車両に対して車輪の回転数の測定結果を変動させる加速度が作用する位置を特定することは困難であるが、カーブ区間における曲率が小さい(カーブが急である)ほど車輪の回転数の測定結果を変動させる可能性は高い。また、勾配区間における車輪の回転数の測定結果を変動させる加速度が作用する位置や凹凸の位置等を特定することは一般に困難であるが、勾配が急であるほど車輪の回転数の測定結果を変動させる可能性は高い。そこで、ここでも統計精度を高めるため、カーブ区間の曲率が所定値以下である場合と勾配区間における勾配の程度が所定値以上である場合には、測定区間の長さを曲率値や勾配の程度に対応付けられた所定の長さだけ延長する修正を行う。
【0049】
なお、曲率が過度に小さく、また、曲率の小さなカーブ区間の距離が過度に長くなる場合には、車輪の回転数の測定結果を過度に変動させるとみなして処理を中止しても良い。同様に、勾配の程度が過度に大きく、また、勾配の大きな勾配区間の距離が過度に長くなる場合に、車輪の回転数の測定結果を過度に変動させるとみなして処理を中止しても良い。また、この構成によれば、上述の誤差要因が存在することに加え、測定区間の形状が車輪の回転数の測定結果を変動させ得る状況となっている場合に、統計的に信頼するために充分な量の測定値を得るために適切な測定区間を選択することができる。この構成によれば、測定区間にカーブ区間や勾配区間が含まれる状況であってもタイヤの空気圧を測定することが可能である。
【0050】
以上の処理によって測定区間を特定すると、図2に示すフローチャートに復帰し、制御部20は、回転数情報測定部21cの処理により、記録媒体30に基準回転数情報30cが記録済であるか否かを判定する(ステップS110)。すなわち、制御部20は、ステップS100にて特定された誤差要因と同じ誤差要因(車両の外部の明るさが同等)について、ステップS105にて特定された測定区間に関する基準回転数情報30cが既に記録媒体30に記録済であるか否かを判定する。
【0051】
ステップS110において、記録媒体30に基準回転数情報30cが記録済であると判定されない場合、制御部20は、回転数情報測定部21cの処理により、現在のタイヤの空気圧が基準気圧であるか否かを判定する(ステップS115)。なお、現在のタイヤの空気圧が基準気圧であるか否かを判定するための構成は、種々の構成を採用可能である。例えば、メンテナンスによってタイヤの空気圧を基準気圧に設定した後に、当該基準気圧に設定したことをユーザー自身がユーザーI/F部45を操作することによって指示する構成を採用可能である。
【0052】
ステップS115にて、空気圧が基準気圧であると判定されない場合、制御部20は、ステップS120をスキップして処理を終了する。一方、ステップS115にて、空気圧が基準気圧であると判定された場合、制御部20は、回転数情報測定部21cの処理により、回転数情報取得処理を行う(ステップS120)。
【0053】
(2−2)回転数情報取得処理:
図4は、当該ステップS120における回転数情報取得処理を示すフローチャートである。当該回転数情報取得処理において、制御部20は、まず、第1地物と車両との相対関係が所定の相対関係であるか否かを判定する(ステップS300)。すなわち、制御部20は、GPS受信部41,車輪センサ42,ジャイロセンサ43の出力信号に基づいて車両の現在位置を特定し、地図情報30aを参照して第1地物の位置を特定する。そして、車両が第1地物の位置に到達する以前にカメラ44が出力する画像データの取得を開始し、当該画像データが示す特徴量から第1地物が画像に含まれるか否かを判定する。そして、当該第1地物の画像が一枚の画像の所定位置に到達した時点で当該第1地物と車両とが所定の相対関係にあると判定する。
【0054】
ステップS300にて、第1地物と車両との相対関係が所定の相対関係であると判定されない場合、ステップS305以降の処理をスキップする。一方、ステップS300にて、第1地物と車両との相対関係が所定の相対関係であると判定された場合、制御部20は、車輪の回転数の測定を開始する(ステップS305)。すなわち、制御部20は、車輪センサ42の出力信号を取得し、車輪の回転数に対応するパルス信号の数の測定を開始する。
【0055】
さらに、制御部20は、第2地物と車両との相対関係が所定の相対関係であるか否かを判定する(ステップS310)。すなわち、制御部20は、車輪の回転数の測定を続けるとともに、カメラ44が出力する画像データの解析を続け、当該画像データが示す特徴量から第2地物の画像が一枚の画像の所定位置に到達したか否かを判定することによって第2地物と車両とが所定の相対関係にあるか否かを判定する。ステップS310にて、第2地物と車両との相対関係が所定の相対関係であると判定された場合、制御部20は、車輪の回転数の測定を終了する(ステップS315)。
【0056】
さらに、本実施形態において、制御部20は、測定区間において車両が安定していたか否かを判定し(ステップS320)、車両が安定していたと判定された場合に記録媒体に回転数情報を記録する(ステップS325)。一方、ステップS320にて車両が安定していたと判定されない場合には、ステップS325をスキップして回転数情報を記録しないこととしている。すなわち、測定区間における車両の挙動は車輪の回転数の測定結果を変動させ得るが、車両の挙動が測定結果の安定性に過大な影響を与える挙動であった場合には回転数情報を記録しないこととし、後の処理で参照すべき回転数情報が記録されていない状態とすることで、車両の挙動が不安定であった場合には空気圧の測定を行わない構成としている。
【0057】
ここで、車両の走行安定性は種々の指標に基づいて特定可能である。例えば、単位時間あたりに車輪センサ42から出力されるパルス信号の数の変化や、ジャイロセンサ43の出力信号に基づいて特定される車両に作用する角速度の単位時間あたりの変化量等が車両の走行安定性を示す指標であるとみなすことが可能である。そして、当該指標が車両の挙動が所定の基準より不安定であることを示している場合には空気圧の測定を行わない構成とする。すなわち、車輪の回転数を示す情報の測定結果の信頼性を低下させるほど車両の走行安定性が低いか否かを予め設定された所定の基準に基づいて判定する。
【0058】
なお、以上の処理が上述のステップS120にて実施された場合、ステップS325において記録される回転数情報は基準回転数情報であり、測定区間および誤差要因に対応付けられて基準回転数情報30cとして記録媒体30に記録されることになる。従って、ステップS325を実施した後に図2に示す処理に復帰すると、それ以後、記録媒体30に基準回転数情報30cが記録されることになる。
【0059】
次に、ステップS110において、記録媒体30に基準回転数情報30cが記録済であると判定された場合について説明する。この場合、制御部20は、ステップS130以降において車両における現在のタイヤの空気圧を測定する処理を行う。まず、制御部20は、回転数情報測定部21cの処理により、回転数情報取得処理を実行する(ステップS130)。当該ステップS130にて実行する回転数情報取得処理も図4に示す処理であり処理内容は上述のステップS120における処理と同様であるが、ステップS130にて回転数情報取得処理が実行された場合に取得される回転数情報は現在のタイヤの空気圧における車輪の回転数を示す回転数情報であり、ステップS325においては当該回転数情報をRAMに記録する。
【0060】
次に、制御部20は、ステップS130における回転数情報取得処理によって、現在のタイヤの空気圧における車輪の回転数を示す回転数情報がRAMに記録済であるか否かを判定する(ステップS135)。ステップS135にて、現在のタイヤの空気圧における車輪の回転数を示す回転数情報がRAMに記録済であると判定されない場合、ステップS140以降の処理をスキップして処理を終了する。
【0061】
一方、ステップS135にて、現在のタイヤの空気圧における車輪の回転数を示す回転数情報がRAMに記録済であると判定された場合、制御部20は、空気圧測定部21dの処理により、記録媒体30を参照して基準回転数情報30cを取得する(ステップS140)。すなわち、ステップS100にて特定された誤差要因およびステップS105にて特定された測定区間に関する基準回転数情報30cを記録媒体30から取得してRAMに記録する。
【0062】
次に、制御部20は、RAMに記録された情報に基づいて、現在のタイヤの空気圧における車輪の回転数と基準回転数との差分を取得し(ステップS145)、当該差分が所定の閾値より大きいか否かを判定する(ステップS150)。そして、ステップS150にて差分が所定の閾値より大きいと判定された場合、制御部20は、空気圧測定部21dの処理により、ユーザーI/F部45に制御信号を出力してタイヤが減圧状態である旨の案内を実行する(ステップS155)。一方、ステップS150にて差分が所定の閾値より大きいと判定されない場合にはステップS155をスキップする。
【0063】
ここで、閾値は、上述の区間長に比例して閾値が大きくなるように設定されている。すなわち、タイヤの空気圧が減圧状態となっている場合の回転数とタイヤの空気圧が基準気圧である場合の回転数との差分は、空気圧が減圧状態になることによって増加した回転数の増加数であるが、車輪の回転数の測定に誤差が生じている場合には当該誤差の影響を受けた値となる。
【0064】
ここで、当該誤差の程度は誤差要因ごとに異なり、誤差要因による誤差の程度が大きくなると上述の差分に含まれる誤差の最大値も大きくなる。しかし、当該誤差の程度が大きくなった場合には、これに対応して区間長が長くなるように設定され、上述の閾値は当該区間長に比例して大きくなるように設定されている。従って、上述の差分と閾値を比較すれば、誤差要因による誤差が大きい場合であってもその誤差の影響を受けることなく、タイヤの空気圧が減圧しているか否かを判定することが可能になる。なお、ここでは、閾値が区間長に応じて設定されている例を説明したが、当該閾値は誤差要因毎に設定されていても良い。すなわち、誤差要因に対応する誤差の程度が大きくなるほど閾値が大きくなるように設定されていても良い。
【0065】
さらに、ステップS320において、測定区間における車両の安定性を判定し、車両の安定性に応じて回転数情報を記録する構成としているため、信頼性の低い状態で空気圧の測定を行うことを防止することができる。なお、車両の走行安定性を示す指標は、上述のようなパルス信号の数や角速度の他、車両に作用する加速度や車速の大きさ、変化度合いに基づいて定義しても良いし、車両が停止や車線変更を実施した回数であっても良く、種々の指標を採用可能である。
【0066】
(3)他の実施形態:
以上の実施形態は本発明を実施するための一例であり、誤差要因に対応した測定区間を設定し、当該測定区間にて測定した車輪の回転数を示す情報に基づいてタイヤの空気圧を測定する限りにおいて、他にも種々の実施形態を採用可能である。例えば、車輪の回転数を示す情報は、車輪の回転数と実質的に等価な情報であって当該情報と基準回転数を示す情報とを比較することでタイヤの空気圧を測定可能な情報であればよい。従って、車輪センサ42の出力信号のような所定回転角毎のパルス信号の他、車輪の回転数自体を示す情報を取得する構成であっても良いし、車輪の回転数を間接的に示す他の情報、例えば、車輪毎の走行距離を示す情報などであっても良い。
【0067】
また、本発明において、車輪の回転数は測定区間で測定されるため、測定区間を特定する以前に誤差要因が特定されている必要がある。従って、誤差要因は、車両が測定のための走行を開始する以前の時点で発生可能性の有無を推定可能な誤差に関する誤差要因であり、道路区間が特定されていなくても誤差が生じるか否かを推定可能な誤差に関する誤差要因である。このような誤差要因の例としては、車両の周囲の環境が挙げられ、上述のような車両の外部の明るさの他、車両の周囲の天候であっても良い。この場合、外部情報取得部40は車両の外部の天候を測定するセンサや天候情報を取得する通信部等によって構成される。
【0068】
さらに、タイヤの空気圧の測定は、基準気圧との相対的な関係に基づく測定であれば良く、減圧状態であることを判定する構成の他、基準気圧との相対的な関係に基づいて空気圧の絶対値を測定する構成であっても良いし、基準気圧との比を測定する構成であっても良い。
【0069】
さらに、誤差要因に対応した区間長以上の長さを確保可能な複数の区間を候補として選択し、当該候補の中から測定区間を選択してもよい。例えば、候補の中で、カーブ区間および勾配区間の数が少ない区間を測定区間として選択し、また、カーブ区間が存在した場合にその曲率ができるだけ小さいカーブ区間を含む測定区間を選択し、また、勾配区間が存在した場合にその高度変化ができるだけ小さい勾配区間を含む測定区間を選択する構成等を採用可能である。むろん、カーブ区間や勾配区間を含む区間を測定区間の候補としない構成としても良い。
【0070】
さらに、上述の実施形態においては、タイヤの空気圧が基準気圧である状態において、測定区間を選択して車輪の回転数を測定することによって基準回転数情報30cを取得していたが、任意の区間で基準回転数情報を測定しても良い。例えば、タイヤの空気圧が基準気圧である状態において、所定の期間において車輪の回転数を測定し、単位距離あたりの車輪の回転数を基準回転数情報とし、任意の測定区間の距離と基準回転数情報が示す回転数とを乗じた結果と、当該測定区間において測定された車輪の回転数とを比較する構成としてもよい。むろん、基準回転数情報をタイヤの空気圧が基準気圧である状態の理想他駅なタイヤの径から算出しても良い。
【符号の説明】
【0071】
10…ナビゲーション装置、20…制御部、21…空気圧測定プログラム、21a…誤差要因特定部、21b…測定区間特定部、21c…回転数情報測定部、21d…空気圧測定部、30…記録媒体、30a…地図情報、30b…区間長情報、30c…基準回転数情報、40…外部情報取得部、41…GPS受信部、42…車輪センサ、43…ジャイロセンサ、44…カメラ、45…ユーザーI/F部
【特許請求の範囲】
【請求項1】
車両が備える車輪の回転数を示す情報の測定に誤差を生じさせる誤差要因を特定する誤差要因特定手段と、
前記誤差要因に応じて前記車輪の回転数を示す情報の測定を行う測定区間を特定する測定区間特定手段と、
前記測定区間において前記車輪の回転数を示す情報を測定する回転数情報測定手段と、
前記回転数を示す情報と前記車輪のタイヤの空気圧が基準気圧である状態で前記車両が前記測定区間を走行した場合の前記車輪の基準回転数を示す情報とを比較して前記タイヤの空気圧を測定する空気圧測定手段と、
を備えるタイヤ空気圧測定装置。
【請求項2】
前記測定区間特定手段は、前記誤差要因に対応する区間長以上の区間を前記測定区間として特定する、
請求項1に記載のタイヤ空気圧測定装置。
【請求項3】
前記測定区間特定手段は、前記誤差要因による前記誤差が大きいほど長くなるように前記区間長を特定する、
請求項2に記載のタイヤ空気圧測定装置。
【請求項4】
前記測定区間特定手段は、前記誤差要因に応じて特定された前記測定区間に曲率が所定値以下のカーブ区間または単位距離あたりの高度変化量が所定値以上の勾配区間が含まれる場合に、前記区間長よりも長くなるように前記測定区間を延長する、
請求項2または請求項3のいずれかに記載のタイヤ空気圧測定装置。
【請求項5】
前記基準回転数を示す情報は、前記タイヤの空気圧が前記基準気圧である状態で前記車両にて実際に前記測定区間を走行し、当該測定区間内において前記車輪の回転数を示す情報を測定することによって取得された情報である、
請求項1〜請求項4のいずれかに記載のタイヤ空気圧測定装置。
【請求項6】
前記誤差要因特定手段は、
前記車両が備える撮像部によって撮影した画像に基づいて地物と前記車両との相対関係を特定する際に誤差を生じさせる要因を前記誤差要因として特定し、
前記測定区間特定手段は、前記誤差要因に応じて
前記測定区間の開始位置を特定する際の基準となる第1地物と前記測定区間の終了位置を特定する際の基準となる第2地物とを特定し、
前記回転数情報測定手段は、
前記撮像部によって撮影した前記第1地物の画像に基づいて特定される前記第1地物と前記車両との相対関係が所定の相対関係である場合に前記車輪の回転数を示す情報の測定を開始し、
前記撮像部によって撮影した前記第2地物の画像に基づいて特定される前記第2地物と前記車両との相対関係が前記所定の相対関係である場合に前記車輪の回転数を示す情報の測定を終了する、
請求項1〜請求項5のいずれかに記載のタイヤ空気圧測定装置。
【請求項7】
前記空気圧測定手段は、前記車輪の回転数を示す情報が測定された場合の前記測定区間における前記車両の走行安定性が所定の基準より低い場合には前記空気圧の測定を行わない、
請求項1〜請求項6のいずれかに記載のタイヤ空気圧測定装置。
【請求項8】
車両が備える車輪の回転数を示す情報の測定に誤差を生じさせる誤差要因を特定する誤差要因特定工程と、
前記誤差要因に応じて前記車輪の回転数を示す情報の測定を行う測定区間を特定する測定区間特定工程と、
前記測定区間において前記車輪の回転数を示す情報を測定する回転数情報測定工程と、
前記回転数を示す情報と前記車輪のタイヤの空気圧が基準気圧である状態で前記車両が前記測定区間を走行した場合の前記車輪の基準回転数を示す情報とを比較して前記タイヤの空気圧を測定する空気圧測定工程と、
を備えるタイヤ空気圧測定方法。
【請求項9】
車両が備える車輪の回転数を示す情報の測定に誤差を生じさせる誤差要因を特定する誤差要因特定機能と、
前記誤差要因に応じて前記車輪の回転数を示す情報の測定を行う測定区間を特定する測定区間特定機能と、
前記測定区間において前記車輪の回転数を示す情報を測定する回転数情報測定機能と、
前記回転数を示す情報と前記車輪のタイヤの空気圧が基準気圧である状態で前記車両が前記測定区間を走行した場合の前記車輪の基準回転数を示す情報とを比較して前記タイヤの空気圧を測定する空気圧測定機能と、
をコンピュータに実現させるタイヤ空気圧測定プログラム。
【請求項1】
車両が備える車輪の回転数を示す情報の測定に誤差を生じさせる誤差要因を特定する誤差要因特定手段と、
前記誤差要因に応じて前記車輪の回転数を示す情報の測定を行う測定区間を特定する測定区間特定手段と、
前記測定区間において前記車輪の回転数を示す情報を測定する回転数情報測定手段と、
前記回転数を示す情報と前記車輪のタイヤの空気圧が基準気圧である状態で前記車両が前記測定区間を走行した場合の前記車輪の基準回転数を示す情報とを比較して前記タイヤの空気圧を測定する空気圧測定手段と、
を備えるタイヤ空気圧測定装置。
【請求項2】
前記測定区間特定手段は、前記誤差要因に対応する区間長以上の区間を前記測定区間として特定する、
請求項1に記載のタイヤ空気圧測定装置。
【請求項3】
前記測定区間特定手段は、前記誤差要因による前記誤差が大きいほど長くなるように前記区間長を特定する、
請求項2に記載のタイヤ空気圧測定装置。
【請求項4】
前記測定区間特定手段は、前記誤差要因に応じて特定された前記測定区間に曲率が所定値以下のカーブ区間または単位距離あたりの高度変化量が所定値以上の勾配区間が含まれる場合に、前記区間長よりも長くなるように前記測定区間を延長する、
請求項2または請求項3のいずれかに記載のタイヤ空気圧測定装置。
【請求項5】
前記基準回転数を示す情報は、前記タイヤの空気圧が前記基準気圧である状態で前記車両にて実際に前記測定区間を走行し、当該測定区間内において前記車輪の回転数を示す情報を測定することによって取得された情報である、
請求項1〜請求項4のいずれかに記載のタイヤ空気圧測定装置。
【請求項6】
前記誤差要因特定手段は、
前記車両が備える撮像部によって撮影した画像に基づいて地物と前記車両との相対関係を特定する際に誤差を生じさせる要因を前記誤差要因として特定し、
前記測定区間特定手段は、前記誤差要因に応じて
前記測定区間の開始位置を特定する際の基準となる第1地物と前記測定区間の終了位置を特定する際の基準となる第2地物とを特定し、
前記回転数情報測定手段は、
前記撮像部によって撮影した前記第1地物の画像に基づいて特定される前記第1地物と前記車両との相対関係が所定の相対関係である場合に前記車輪の回転数を示す情報の測定を開始し、
前記撮像部によって撮影した前記第2地物の画像に基づいて特定される前記第2地物と前記車両との相対関係が前記所定の相対関係である場合に前記車輪の回転数を示す情報の測定を終了する、
請求項1〜請求項5のいずれかに記載のタイヤ空気圧測定装置。
【請求項7】
前記空気圧測定手段は、前記車輪の回転数を示す情報が測定された場合の前記測定区間における前記車両の走行安定性が所定の基準より低い場合には前記空気圧の測定を行わない、
請求項1〜請求項6のいずれかに記載のタイヤ空気圧測定装置。
【請求項8】
車両が備える車輪の回転数を示す情報の測定に誤差を生じさせる誤差要因を特定する誤差要因特定工程と、
前記誤差要因に応じて前記車輪の回転数を示す情報の測定を行う測定区間を特定する測定区間特定工程と、
前記測定区間において前記車輪の回転数を示す情報を測定する回転数情報測定工程と、
前記回転数を示す情報と前記車輪のタイヤの空気圧が基準気圧である状態で前記車両が前記測定区間を走行した場合の前記車輪の基準回転数を示す情報とを比較して前記タイヤの空気圧を測定する空気圧測定工程と、
を備えるタイヤ空気圧測定方法。
【請求項9】
車両が備える車輪の回転数を示す情報の測定に誤差を生じさせる誤差要因を特定する誤差要因特定機能と、
前記誤差要因に応じて前記車輪の回転数を示す情報の測定を行う測定区間を特定する測定区間特定機能と、
前記測定区間において前記車輪の回転数を示す情報を測定する回転数情報測定機能と、
前記回転数を示す情報と前記車輪のタイヤの空気圧が基準気圧である状態で前記車両が前記測定区間を走行した場合の前記車輪の基準回転数を示す情報とを比較して前記タイヤの空気圧を測定する空気圧測定機能と、
をコンピュータに実現させるタイヤ空気圧測定プログラム。
【図1】


【図2】

【図3】
【図4】

【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2011−80947(P2011−80947A)
【公開日】平成23年4月21日(2011.4.21)
【国際特許分類】
【出願番号】特願2009−235140(P2009−235140)
【出願日】平成21年10月9日(2009.10.9)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【Fターム(参考)】
【公開日】平成23年4月21日(2011.4.21)
【国際特許分類】
【出願日】平成21年10月9日(2009.10.9)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【Fターム(参考)】
[ Back to top ]