
タクシーメータ及び配車システム
【課題】配車指示を受けた乗務員が目的地に到着する時間を短縮することができるタクシーメータを提供する。
【解決手段】タクシーメータ3は、配車管理装置8から迎車情報を受信すると、迎車情報に含まれる、お客様が指定した場所(目的地)と車両の現在地のGPSデータを比較する。タクシーメータ3は、車両の進行方向に対する目的地方向の角度を算出し、方向指示表示部48を表示部32の画面に表示する。方向指示表示部48内の矢印52で表される車両の進行方向に対し、目的地の方向が左右30度以内の範囲にある場合、矢印48aは点灯表示される。目的地の方向が左右60度以内の範囲にある場合、矢印48aは点滅表示される。目的地の方向が左右60度を越える場合、矢印48aは点滅表示された後、ブザー21が鳴動する。
【解決手段】タクシーメータ3は、配車管理装置8から迎車情報を受信すると、迎車情報に含まれる、お客様が指定した場所(目的地)と車両の現在地のGPSデータを比較する。タクシーメータ3は、車両の進行方向に対する目的地方向の角度を算出し、方向指示表示部48を表示部32の画面に表示する。方向指示表示部48内の矢印52で表される車両の進行方向に対し、目的地の方向が左右30度以内の範囲にある場合、矢印48aは点灯表示される。目的地の方向が左右60度以内の範囲にある場合、矢印48aは点滅表示される。目的地の方向が左右60度を越える場合、矢印48aは点滅表示された後、ブザー21が鳴動する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両に搭載され、迎車情報を受信するタクシーメータ、及び迎車を行う配車システムに関する。
【背景技術】
【0002】
従来、迎車時、事務所から配車指示の連絡があると、乗務員は、目的地の場所を検索し、目的地に向かっている。このとき、目的地が分からない場合、乗務員は、カーナビや地図を使って、大体の位置を把握する。
【0003】
この種の先行技術として、デジタル無線で配車センタと通信を行い、迎車時、配車センタから利用者付近の概略図や利用者情報を受信するタクシーメータが知られている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−338464号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記従来のタクシーメータでは、つぎのような問題があった。前述したように、迎車時、目的地が分からない場合、乗務員は、カーナビや地図を使ってその位置を把握するので、目的地の検索に時間を費やしたり、また、走行中に路肩などに停車して検索することで、時間の損失が発生する。また、地図で目的地を確認している時間も損失となる。このため、目的地への到着が遅れることになる。
【0006】
本発明は、上述した事情に鑑みてなされたものであり、その目的は、配車指示を受けた乗務員が目的地に到着する時間を短縮することができるタクシーメータ及び配車システムを提供することにある。
【課題を解決するための手段】
【0007】
前述した目的を達成するために、本発明に係るタクシーメータは、下記(1)〜(6)を特徴としている。
(1) 車両に搭載され、迎車情報を受信するタクシーメータであって、
前記迎車情報に含まれる目的地を取得する取得手段と、
前記車両の進行方向に対する前記目的地の方向を算出する方向算出手段と、
前記目的地の方向を示すマークを前記タクシーメータの画面に表示するマーク表示手段と、を備えること。
(2) 上記(1)の構成のタクシーメータであって、
前記方向算出手段によって算出された目的地の方向が所定の角度範囲内にあるか否かを判別する方向判別手段を備え、
前記マーク表示手段は、前記目的地の方向が前記所定の角度範囲から外れる場合、前記画面に表示されるマークを、前記目的地の方向が前記所定の角度範囲内にある場合と異なる表示態様で表示すること。
(3) 上記(2)の構成のタクシーメータであって、
前記方向判別手段によって前記目的地の方向が第1の角度範囲から外れると判別された場合、前記マーク表示手段は、前記マークを前記異なる表示態様で表示し、
前記方向判別手段によって前記目的地の方向が前記第1の角度より大きい第2の角度範囲から外れると判別された場合、さらに音声出力を行う音声出力手段を備えること。
(4) 上記(1)〜(3)のいずれか1つに構成のタクシーメータであって、
前記迎車情報に含まれる目的地を取得する取得手段と、
前記車両の現在位置から前記目的地までの距離を算出する距離算出手段と、
前記距離算出手段によって算出された目的地までの距離が所定の距離内にあるか否かを判別する距離判別手段とを備え、
前記目的地までの距離が前記所定の距離を越える場合、前記マーク表示手段は、前記画面に表示されるマークを、前記所定の距離内にある場合と異なる表示態様で表示すること。
(5) 上記(4)の構成のタクシーメータであって、
前記マーク表示手段は、
前記距離判別手段によって前記目的地までの距離が第1の距離を越えると判別された場合、前記マークを第1の表示態様で表示し、
前記距離判別手段によって前記目的地までの距離が前記第1の距離より長い第2の距離を越えると判別された場合、前記マークを前記第1の表示態様と異なる第2の表示態様で表示すること。
(6) 上記(1)〜(5)のいずれか1つに構成のタクシーメータであって、
前記マークは、前記目的地の方向を表す矢印と前記矢印の周囲の背景とからなること。
【0008】
前述した目的を達成するために、本発明に係る配車システムは、下記(7)を特徴としている。
(7) 車両に搭載されたタクシーメータと前記車両を管理する配車管理装置とを備え、迎車を行う配車システムであって、
前記配車管理装置は、
迎車の予約を受け付け、迎車情報を取得する迎車受付手段と、
前記迎車受付手段によって迎車の予約が受け付けられた場合、前記迎車情報に含まれる目的地をもとに、車両を特定する車両特定手段と、
前記車両特定手段によって特定された車両に搭載されたタクシーメータに前記迎車情報を送信して配車指示を行う送信手段とを備え、
前記タクシーメータは、
前記配車管理装置から送信された迎車情報を受信する受信手段と、
前記迎車情報に含まれる目的地を取得する取得手段と、
前記車両の進行方向に対する前記目的地の方向を算出する方向算出手段と、
前記目的地の方向を示すマークを前記タクシーメータの画面に表示するマーク表示手段と、を備えること。
【0009】
上記(1)〜(6)の構成のタクシーメータ、及び上記(7)の構成の配車システムによれば、目的地の方向を示すマークがタクシーメータの画面に表示されるので、配車指示を受けた乗務員が目的地に到着する時間を短縮することができる。また、タクシーメータの画面を見るだけで、大まかな目的地が分かるので、乗務員による迎車拒否の防止にも繋がる。
【発明の効果】
【0010】
本発明によれば、目的地の方向を示すマークがタクシーメータの画面に表示されるので、配車指示を受けた乗務員が目的地に到着する時間を短縮することができる。また、タクシーメータの画面を見るだけで、大まかな目的地が分かるので、乗務員による迎車拒否の防止にも繋がる。
【図面の簡単な説明】
【0011】
【図1】図1は、第1の実施形態における配車システム1の構成を示す図である。
【図2】図2は、タクシーメータ3の筐体前面に設けられた表示部12の画面を示す図である。
【図3】図3は、車両の進行方向と目的地の指示方向との関係を示す図である。
【図4】図4は、タクシーメータ3における迎車時の動作手順を示すフローチャートである。
【図5】図5は、配車管理装置8における迎車時の動作手順を示すフローチャートである。
【図6】図6は、第2の実施形態のタクシーメータ3における表示部12の画面の遷移を示す図である。
【図7】図7は、タクシーメータ3における進行方向指示動作手順を示すフローチャートである。
【図8】図8は、配車管理装置8における迎車時の動作手順を示すフローチャートである。
【発明を実施するための形態】
【0012】
本発明の実施形態におけるタクシーメータ及び配車システムについて図面を用いて説明する。本実施形態では、タクシー車両に搭載されるタクシーメータと、複数のタクシー車両を管理する配車管理装置とを備えた配車システムが、迎車を行う場合を示す。
【0013】
(第1の実施形態)
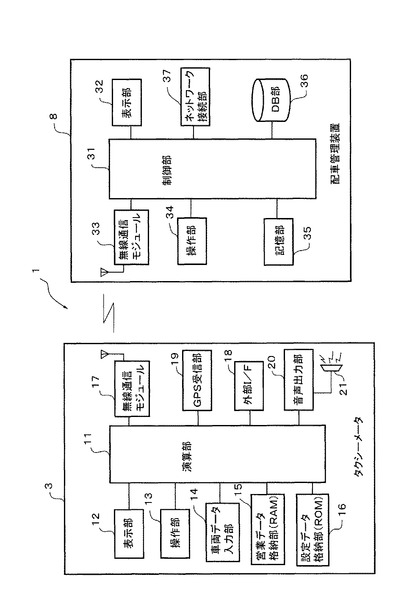
図1は第1の実施形態における配車システム1の構成を示す図である。配車システム1は、タクシーメータ3および事務所に設置された配車管理装置8から構成される。
【0014】
タクシーメータ3は、演算部11、表示部12、操作部13、車両データ入力部14、営業データ格納部15、設定データ格納部16、無線通信モジュール17、外部インタフェース(I/F)18、GPS受信部19および音声出力部20を有する。
【0015】
演算部11は、CPU、ROM、RAM、タイマなどを有し、CPUがROMに格納された制御プログラムを実行することで、タクシーメータ全体を制御する。表示部12は、タクシーメータ3の筐体前面に設けられたLCDからなり、走行距離、タクシ走行料金(運賃)、タリフ状態等を表示する。操作部13は、表示部12の画面に設けられたタッチパネルからなり、画面に表示されたボタンの押下を検出して受け付ける。
【0016】
車両データ入力部14は、車両に備わる各種センサから、走行距離、車両速度、エンジン回転数などの車両データを入力する。営業データ格納部15(RAM)には、乗車時間や走行距離の他、迎車、割増、高速の有無などの営業データが記憶される。設定データ格納部16(ROM)には、乗務員の認証データ、車両番号、労務情報などの設定データが格納されている。
【0017】
無線通信モジュール17は、配車管理装置8とデジタル無線で通信可能である。GPS(Global Positioning System)受信部19は、人工衛星からの電波を受信し、車両(タクシー)の現在位置を検出する。
【0018】
外部I/F18には、プリンタなどの外部デバイスが接続可能である。音声出力部20には、鳴動するブザー21が接続されている。
【0019】
一方、配車管理装置8は、制御部31、表示部32、無線通信モジュール33、操作部34、記憶部35、データベース(DB)部36およびネットワーク接続部37を有する。
【0020】
制御部31は、CPU、ROM、RAMなどを有し、CPUがROMに格納された制御プログラムを実行することで、配車管理装置全体を制御する。また、制御部31は、記憶部35に登録された、配車システムのアプリケーションを実行し、タクシーに搭載されたタクシーメータ3に配車指示などを行う。
【0021】
表示部32は、タクシーメータ3の筐体前面に設けられたLCDからなり、各種の情報を表示する。無線通信モジュール33は、タクシーメータ3とデジタル無線で通信可能である。操作部34は、各種ボタンを有し、これらのボタンの押下を受け付ける。
【0022】
記憶部35には、後述するように、CPUによって実行される配車システムのアプリケーションが格納されている。データベース部36には、GPSデータを含む地図情報や、お客様の登録情報などが登録されている。ネットワーク接続部37は、インターネット等のネットワークに接続されており、迎車の予約などを受け付ける際、このネットワークに接続可能なお客様の通信端末と通信を行う。
【0023】
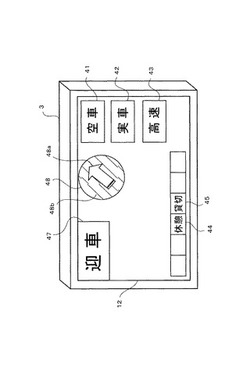
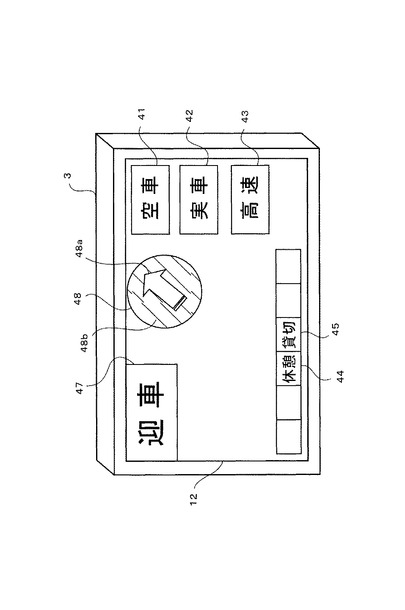
図2はタクシーメータ3の筐体前面に設けられた表示部12の画面を示す図である。表示部12の画面には、空車ボタン41、実車ボタン42、高速ボタン43、休憩ボタン44、貸切ボタン45の他、迎車時、迎車を表す文字表示部47、およびお客様の予約場所(目的地)の方向を表す方向指示表示部48(マーク)が表示されている。方向指示表示部48は、その中央に配置された矢印48aとその周囲の背景48bとからなる。ここで、表示部12はマーク表示手段に相当する。
【0024】
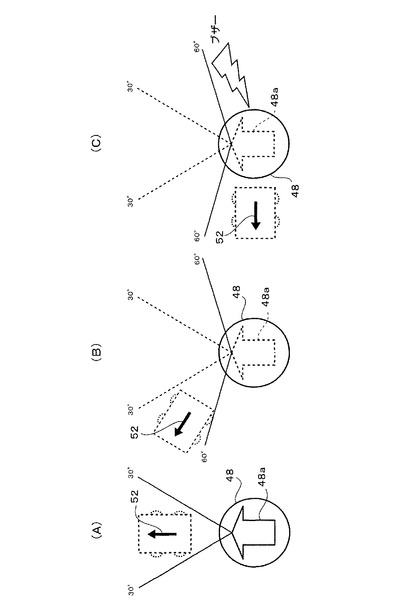
図3は車両の進行方向と目的地の指示方向との関係を示す図である。図3(A)は、矢印52で表される車両の進行方向に対し、目的地の方向が左右30度以内の範囲(角度範囲内)にある場合を示す。この場合、方向指示表示部48内の矢印48aは点灯表示される。図3(B)は、矢印52で表される車両の進行方向に対し、目的地の方向が左右30度を越えて60度以内の範囲(角度範囲内)にある場合を示す。この場合、方向指示表示部48内の矢印48aは点滅表示される。このように、異なる表示態様で方向指示表示部は表示される。図3(C)は、矢印52で表される車両の進行方向に対し、目的地の方向が左右60度を越える場合を示す。この場合、方向指示表示部48内の矢印48aは点滅表示された後、さらにブザー21が鳴動する。
【0025】
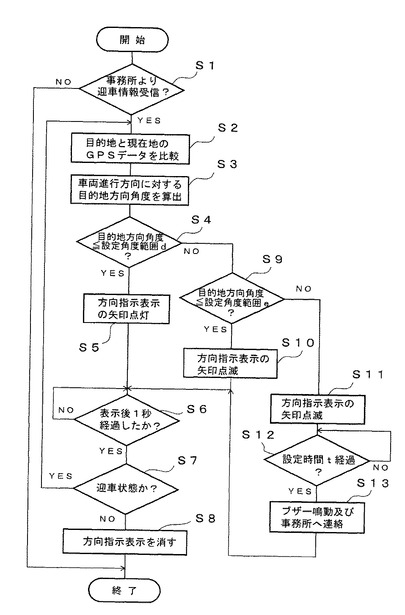
上記構成を有するタクシーメータ3の迎車時の動作を示す。図4はタクシーメータ3における迎車時の動作手順を示すフローチャートである。この動作プログラムは、タクシーメータ3の演算部11内のROMに格納されており、演算部11内のCPUによって周期的に実行される。
【0026】
まず、演算部11は、無線通信モジュール17を通じて、事務所側に設置された配車管理装置8から迎車情報を受信し、配車指示を受けたか否かを判別する(ステップS1)。迎車情報を受信していない場合、演算部11はそのまま本動作を終了する。
【0027】
一方、ステップS1で迎車情報を受信した場合、演算部11は、迎車情報に含まれる、お客様が指定した場所(目的地)のGPSデータと、車両(タクシー)の現在地(現在位置)のGPSデータとを比較する(ステップS2)。
【0028】
ステップS2の比較の結果、演算部11は、車両の進行方向に対する目的地方向の角度を算出する(ステップS3)。このステップS3の処理は方向算出手段に相当する。
【0029】
ここで、車両の進行方向は、GPS受信部19で時系列に検出される車両の現在位置の軌跡から求めてもよいし、車両データ入力部14に接続されるジャイロセンサなどのセンサ出力から求めてもよい。
【0030】
そして、演算部11は、この目的地方向の角度が予め設定された設定角度範囲d以下であるか否かを判別する(ステップS4)。このステップS4の処理は方向判別手段に相当する。この設定角度範囲d(第1の角度範囲)は、任意に設定可能であり、本実施形態では、左右30度の範囲に設定される(図3(A)参照)。
【0031】
目的地方向の角度が予め設定された設定角度範囲d以下である場合、演算部11は、方向指示表示部48内の矢印48aを点灯させる(ステップS5)。演算部11は、表示後、所定時間(例えば1秒)が経過するまで待つ(ステップS6)。この所定時間は、乗務員が視認可能な適当な時間に設定可能である。
【0032】
所定時間が経過すると、演算部11は、迎車状態であるか否かを判別する(ステップS7)。迎車状態である場合、ステップS2の処理に戻り、同様の処理を繰り返す。一方、ステップS7で迎車状態でない場合、演算部11は、方向指示表示部48を消灯する(ステップS8)。この後、演算部11は本動作を終了する。
【0033】
一方、ステップS4で、目的地方向の角度が予め設定された設定角度範囲dを越える場合、演算部11は、目的地方向の角度が予め設定された設定角度範囲e以下であるか否かを判別する(ステップS9)。この設定角度範囲e(第2の角度範囲)は、任意に設定可能であり、本実施形態では、左右60度の範囲に設定される(図3(B)参照)。
【0034】
目的地方向の角度が予め設定された設定角度範囲e以下である場合、演算部11は、方向指示表示部48内の矢印48aを点滅させる(ステップS10)。この後、演算部11は、ステップS6の処理に進む。
【0035】
また一方、ステップS9で、目的地方向の角度が予め設定された設定角度範囲eを越える場合、演算部11は、方向指示表示部48内の矢印48aを点滅させる(ステップS11)。そして、演算部11は、この表示後、所定時間tが経過するまで待つ(ステップS12)。この所定時間tは、乗務員が視認可能な適当な時間に設定可能であり、好ましくは1秒より長い時間に設定される。
【0036】
所定時間tが経過すると、演算部11は、音声出力部20を介してブザー21を鳴動させるとともに、事務所に設置された配車管理装置8に車両が目的地に向かっていない旨を連絡する(ステップS13)。この後、演算部11は、ステップS6の処理に進む。
【0037】
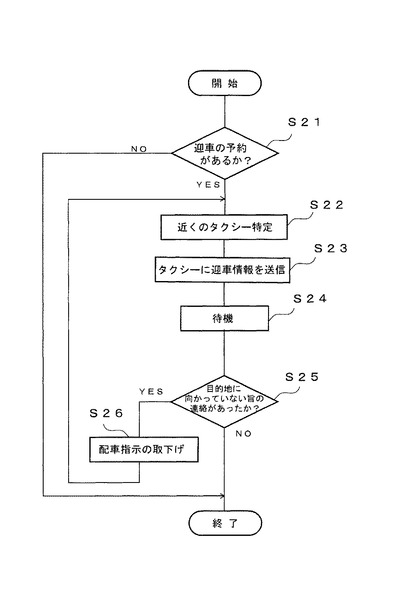
図5は配車管理装置8における迎車時の動作手順を示すフローチャートである。この動作プログラムは、配車管理装置8内の記憶部35に格納されており、制御部31によって周期的に実行される。
【0038】
まず、制御部31は、ネットワーク接続部37や操作部34を介して受け付けた迎車の予約があるか否かを判別する(ステップS21)。このステップS21の処理は迎車受付手段に相当する。迎車の予約がない場合、制御部31はそのまま本動作を終了する。
【0039】
一方、迎車の予約がある場合、制御部31は、無線通信モジュール33を通じてデータベース部36に登録された車両(タクシー)のうち、目的地に近いタクシーを特定する(ステップS22)。このステップS22の処理は車両特定手段に相当する。
【0040】
制御部31は、この特定されたタクシーに対し、データベース部36を検索して目的地のGPSデータを取得し、このGPSデータを含む迎車情報を送信して配車指示を行う(ステップS23)。
【0041】
この後、制御部31は、所定時間待機し(ステップS24)、無線通信モジュール33を通じて、配車指示を受けたタクシーのタクシーメータ3から目的地に向かっていない旨の連絡を受けたか否かを判別する(ステップS25)。連絡を受けていない場合、制御部31は、迎車が完了したものとして、本動作を終了する。一方、ステップS25で連絡を受けた場合、配車指示を取り下げ(ステップS26)、ステップS22の処理に戻る。
【0042】
このように、第1の実施形態のタクシーメータによれば、配車指示を受けた乗務員が現場(目的地)に到着する時間を短縮することができる。また、タクシーメータを見るだけで、目的地の方向などが簡単に分かるので、乗務員による迎車拒否の防止にも繋がる。
【0043】
(第2の実施形態)
前記第1の実施形態では、方向指示表示部48の矢印48aの点灯、点滅やブザー21の鳴動によって、車両の進行方向と目的地方向との関係を示した。第2の実施形態では、方向指示表示部48の背景48bの色を変化させることによって、車両の現在地から目的地までの距離を知らせる場合を示す。
【0044】
また、第2の実施形態におけるタクシーメータおよび配車管理装置は、前記第1の実施形態とほぼ同一の構成を有する。前記第1の実施形態と同一の構成要素については同一の符号を用いることで、その説明を省略する。
【0045】
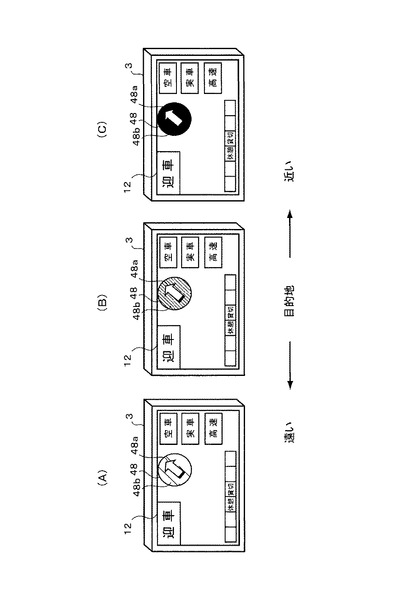
図6は第2の実施形態のタクシーメータ3における表示部12の画面の遷移を示す図である。車両の現在位置から目的地までの距離が設定距離m(第2の距離)を越えており、目的地がとても遠い場合、図6(A)に示すように、方向指示表示部48の背景48bの色は青色(図中、間隔の粗い斜線)である(第2の表示態様)。また、車両の現在位置から目的地までの距離が設定距離m以下であって、設定距離mより短い設定距離n(第1の距離)を越えている場合、図6(B)に示すように、方向指示表示部48の背景48bの色は黄色(図中、間隔の細かい斜線)である(第1の表示態様)。さらに、車両の現在位置から目的地までの距離が設定距離n以下であって、目的地が近い場合、図6(C)に示すように、方向指示表示部48の背景48bの色は赤色(図中、黒)である。
【0046】
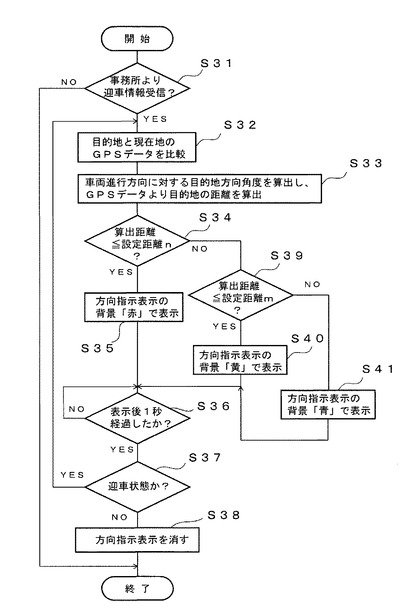
図7はタクシーメータ3における進行方向指示動作手順を示すフローチャートである。この動作プログラムは、タクシーメータ3の演算部11内のROMに格納されており、演算部11内のCPUによって実行される。
【0047】
まず、演算部11は、無線通信モジュール17を通じて、事務所側に設置された配車管理装置8から迎車情報を受信し、配車指示を受け付けたか否かを判別する(ステップS31)。迎車情報を受信していない場合、演算部11はそのまま本動作を終了する。
【0048】
一方、ステップS31で迎車情報を受信した場合、演算部11は、迎車情報に含まれる、お客様が指定した場所(目的地)のGPSデータと、車両(タクシー)の現在地のGPSデータとを比較する(ステップS32)。
【0049】
ステップS32の比較の結果、演算部11は、車両の進行方向に対する目的地方向角度を算出するとともに、車両の現在位置から目的地までの距離を算出する(ステップS33)。このステップS33の処理は距離算出手段に相当する。そして、演算部11は、算出された目的地までの距離が予め設定された設定距離n以下である(所定の距離内にある)か否かを判別する(ステップS34)。このステップS34の処理は距離判別手段に相当する。
【0050】
目的地までの距離が予め設定された設定距離n以下である場合、演算部11は、方向指示表示部48を表示するとともに、目的地の方向を表す矢印48aの周囲の背景48bを赤色(図6(C)参照)で表示する(ステップS35)。演算部11は、表示後、所定時間(例えば1秒)が経過するまで待つ(ステップS36)。この所定時間は、乗務員が視認可能な適当な時間に設定可能である。
【0051】
所定時間が経過すると、演算部11は、迎車状態であるか否かを判別する(ステップS37)。迎車状態である場合、ステップS32の処理に戻り、同様の処理を繰り返す。一方、ステップS37で迎車状態でない場合、演算部11は、方向指示表示部48を消灯する(ステップS38)。この後、演算部11は本動作を終了する。
【0052】
一方、ステップS34で、車両の現在位置から目的地までの距離が予め設定された設定距離nを越える場合、演算部11は、車両の現在位置から目的地までの距離が予め設定された設定距離m以下であるか否かを判別する(ステップS39)。
【0053】
車両の現在位置から目的地までの距離が予め設定された設定距離m以下である場合、演算部11は、方向指示表示部48を表示するとともに、矢印48aの周囲の背景48bの色を黄色(図6(B)参照)に変化させる(ステップS40)。この後、演算部11は、ステップS36の処理に進む。
【0054】
また、ステップS39で、車両の現在位置から目的地までの距離が予め設定された設定距離m以下でない場合、演算部11は、方向指示表示部48を表示するとともに、矢印48aの周囲の背景48bの色を青色(図6(A)参照)に変化させる(ステップS41)。この後、演算部11は、ステップS36の処理に進む。
【0055】
図8は配車管理装置8における迎車時の動作手順を示すフローチャートである。この動作プログラムは、配車管理装置8内の記憶部35に格納されており、制御部31によって周期的に実行される。
【0056】
まず、制御部31は、ネットワーク接続部37や操作部34を介して受け付けたお客様の迎車の予約があるか否かを判別する(ステップS51)。迎車の予約がない場合、制御部31はそのまま本動作を終了する。
【0057】
一方、迎車の予約がある場合、制御部31は、無線通信モジュール33を通じてデータベース部36に登録された車両(タクシー)のうち、目的地に近いタクシーを特定する(ステップS52)。制御部31は、この特定されたタクシーに対し、データベース部36を検索して目的地のGPSデータを取得し、このGPSデータを含む迎車情報を送信して配車指示を行う(ステップS53)。この後、制御部31は、本動作を終了する。
【0058】
このように、第2の実施形態のタクシーメータによれば、配車指示を受けた乗務員が現場(目的地)に到着する時間を短縮することができる。また、タクシーメータを見るだけで、目的地までの距離が簡単に分かるので、乗務員による迎車拒否の防止にも繋がる。
【0059】
なお、本発明は、上記実施形態の構成に限られるものではなく、本実施形態の構成が持つ機能が達成できる構成であればどのようなものであっても適用可能である。
【0060】
例えば、前記第1の実施形態における車両の進行方向と目的地方向との関係を表す表示と、前記第2の実施形態における目的地までの距離を表す表示とを組み合わせてもよい。つまり、第2の実施形態においても、方向指示表示部の矢印の色の変化や、ブザー21の鳴動、さらに、車両が目的地に向かっていない旨の連絡を行うようにしてもよい。
【0061】
また、前記第2の実施形態では、方向指示表示部の背景の色が3段階に変化する場合を示したが、4段階以上、あるいはグラデーションで徐々に色が変化するようにしてもよい。また、方向指示表示部の背景の色を変化させたが、その他の部分の色、たとえば矢印の色を変化させてもよい。
【0062】
また、上記実施形態では、目的地の方向を表すマークとして、矢印と背景からなる方向指示表示部が用いられたが、これに限られるものではなく、種々の表示態様で表示可能である。例えば、タクシーメータの画面の上下左右をそれぞれ北南西東の方位とみなし、画面の枠に近い位置に置かれた丸印などで目的地の方向を表示するようにしてもよい。
【0063】
本発明は、車両に搭載されたタクシーメータが迎車情報を受信する際、配車指示を受けた乗務員が目的地に到着する時間を短縮することができ、有用である。
【符号の説明】
【0064】
1 配車システム
3 タクシーメータ
8 配車管理装置
11 演算部
12 表示部
13、34 操作部
14 車両データ入力部
15 営業データ格納部
16 設定データ格納部
17、33 無線通信モジュール
18 外部インタフェース(I/F)
19 GPS受信部
20 音声出力部
21 ブザー
31 制御部
32 表示部
35 記憶部
36 データベース(DB)部
37 ネットワーク接続部
41 空車ボタン
42 実車ボタン
43 高速ボタン
44 休憩ボタン
45 貸切ボタン
48 方向指示表示部
48a、52 矢印
48b 背景
【技術分野】
【0001】
本発明は、車両に搭載され、迎車情報を受信するタクシーメータ、及び迎車を行う配車システムに関する。
【背景技術】
【0002】
従来、迎車時、事務所から配車指示の連絡があると、乗務員は、目的地の場所を検索し、目的地に向かっている。このとき、目的地が分からない場合、乗務員は、カーナビや地図を使って、大体の位置を把握する。
【0003】
この種の先行技術として、デジタル無線で配車センタと通信を行い、迎車時、配車センタから利用者付近の概略図や利用者情報を受信するタクシーメータが知られている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−338464号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記従来のタクシーメータでは、つぎのような問題があった。前述したように、迎車時、目的地が分からない場合、乗務員は、カーナビや地図を使ってその位置を把握するので、目的地の検索に時間を費やしたり、また、走行中に路肩などに停車して検索することで、時間の損失が発生する。また、地図で目的地を確認している時間も損失となる。このため、目的地への到着が遅れることになる。
【0006】
本発明は、上述した事情に鑑みてなされたものであり、その目的は、配車指示を受けた乗務員が目的地に到着する時間を短縮することができるタクシーメータ及び配車システムを提供することにある。
【課題を解決するための手段】
【0007】
前述した目的を達成するために、本発明に係るタクシーメータは、下記(1)〜(6)を特徴としている。
(1) 車両に搭載され、迎車情報を受信するタクシーメータであって、
前記迎車情報に含まれる目的地を取得する取得手段と、
前記車両の進行方向に対する前記目的地の方向を算出する方向算出手段と、
前記目的地の方向を示すマークを前記タクシーメータの画面に表示するマーク表示手段と、を備えること。
(2) 上記(1)の構成のタクシーメータであって、
前記方向算出手段によって算出された目的地の方向が所定の角度範囲内にあるか否かを判別する方向判別手段を備え、
前記マーク表示手段は、前記目的地の方向が前記所定の角度範囲から外れる場合、前記画面に表示されるマークを、前記目的地の方向が前記所定の角度範囲内にある場合と異なる表示態様で表示すること。
(3) 上記(2)の構成のタクシーメータであって、
前記方向判別手段によって前記目的地の方向が第1の角度範囲から外れると判別された場合、前記マーク表示手段は、前記マークを前記異なる表示態様で表示し、
前記方向判別手段によって前記目的地の方向が前記第1の角度より大きい第2の角度範囲から外れると判別された場合、さらに音声出力を行う音声出力手段を備えること。
(4) 上記(1)〜(3)のいずれか1つに構成のタクシーメータであって、
前記迎車情報に含まれる目的地を取得する取得手段と、
前記車両の現在位置から前記目的地までの距離を算出する距離算出手段と、
前記距離算出手段によって算出された目的地までの距離が所定の距離内にあるか否かを判別する距離判別手段とを備え、
前記目的地までの距離が前記所定の距離を越える場合、前記マーク表示手段は、前記画面に表示されるマークを、前記所定の距離内にある場合と異なる表示態様で表示すること。
(5) 上記(4)の構成のタクシーメータであって、
前記マーク表示手段は、
前記距離判別手段によって前記目的地までの距離が第1の距離を越えると判別された場合、前記マークを第1の表示態様で表示し、
前記距離判別手段によって前記目的地までの距離が前記第1の距離より長い第2の距離を越えると判別された場合、前記マークを前記第1の表示態様と異なる第2の表示態様で表示すること。
(6) 上記(1)〜(5)のいずれか1つに構成のタクシーメータであって、
前記マークは、前記目的地の方向を表す矢印と前記矢印の周囲の背景とからなること。
【0008】
前述した目的を達成するために、本発明に係る配車システムは、下記(7)を特徴としている。
(7) 車両に搭載されたタクシーメータと前記車両を管理する配車管理装置とを備え、迎車を行う配車システムであって、
前記配車管理装置は、
迎車の予約を受け付け、迎車情報を取得する迎車受付手段と、
前記迎車受付手段によって迎車の予約が受け付けられた場合、前記迎車情報に含まれる目的地をもとに、車両を特定する車両特定手段と、
前記車両特定手段によって特定された車両に搭載されたタクシーメータに前記迎車情報を送信して配車指示を行う送信手段とを備え、
前記タクシーメータは、
前記配車管理装置から送信された迎車情報を受信する受信手段と、
前記迎車情報に含まれる目的地を取得する取得手段と、
前記車両の進行方向に対する前記目的地の方向を算出する方向算出手段と、
前記目的地の方向を示すマークを前記タクシーメータの画面に表示するマーク表示手段と、を備えること。
【0009】
上記(1)〜(6)の構成のタクシーメータ、及び上記(7)の構成の配車システムによれば、目的地の方向を示すマークがタクシーメータの画面に表示されるので、配車指示を受けた乗務員が目的地に到着する時間を短縮することができる。また、タクシーメータの画面を見るだけで、大まかな目的地が分かるので、乗務員による迎車拒否の防止にも繋がる。
【発明の効果】
【0010】
本発明によれば、目的地の方向を示すマークがタクシーメータの画面に表示されるので、配車指示を受けた乗務員が目的地に到着する時間を短縮することができる。また、タクシーメータの画面を見るだけで、大まかな目的地が分かるので、乗務員による迎車拒否の防止にも繋がる。
【図面の簡単な説明】
【0011】
【図1】図1は、第1の実施形態における配車システム1の構成を示す図である。
【図2】図2は、タクシーメータ3の筐体前面に設けられた表示部12の画面を示す図である。
【図3】図3は、車両の進行方向と目的地の指示方向との関係を示す図である。
【図4】図4は、タクシーメータ3における迎車時の動作手順を示すフローチャートである。
【図5】図5は、配車管理装置8における迎車時の動作手順を示すフローチャートである。
【図6】図6は、第2の実施形態のタクシーメータ3における表示部12の画面の遷移を示す図である。
【図7】図7は、タクシーメータ3における進行方向指示動作手順を示すフローチャートである。
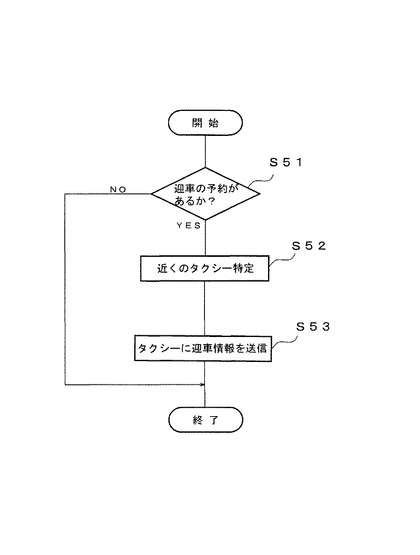
【図8】図8は、配車管理装置8における迎車時の動作手順を示すフローチャートである。
【発明を実施するための形態】
【0012】
本発明の実施形態におけるタクシーメータ及び配車システムについて図面を用いて説明する。本実施形態では、タクシー車両に搭載されるタクシーメータと、複数のタクシー車両を管理する配車管理装置とを備えた配車システムが、迎車を行う場合を示す。
【0013】
(第1の実施形態)
図1は第1の実施形態における配車システム1の構成を示す図である。配車システム1は、タクシーメータ3および事務所に設置された配車管理装置8から構成される。
【0014】
タクシーメータ3は、演算部11、表示部12、操作部13、車両データ入力部14、営業データ格納部15、設定データ格納部16、無線通信モジュール17、外部インタフェース(I/F)18、GPS受信部19および音声出力部20を有する。
【0015】
演算部11は、CPU、ROM、RAM、タイマなどを有し、CPUがROMに格納された制御プログラムを実行することで、タクシーメータ全体を制御する。表示部12は、タクシーメータ3の筐体前面に設けられたLCDからなり、走行距離、タクシ走行料金(運賃)、タリフ状態等を表示する。操作部13は、表示部12の画面に設けられたタッチパネルからなり、画面に表示されたボタンの押下を検出して受け付ける。
【0016】
車両データ入力部14は、車両に備わる各種センサから、走行距離、車両速度、エンジン回転数などの車両データを入力する。営業データ格納部15(RAM)には、乗車時間や走行距離の他、迎車、割増、高速の有無などの営業データが記憶される。設定データ格納部16(ROM)には、乗務員の認証データ、車両番号、労務情報などの設定データが格納されている。
【0017】
無線通信モジュール17は、配車管理装置8とデジタル無線で通信可能である。GPS(Global Positioning System)受信部19は、人工衛星からの電波を受信し、車両(タクシー)の現在位置を検出する。
【0018】
外部I/F18には、プリンタなどの外部デバイスが接続可能である。音声出力部20には、鳴動するブザー21が接続されている。
【0019】
一方、配車管理装置8は、制御部31、表示部32、無線通信モジュール33、操作部34、記憶部35、データベース(DB)部36およびネットワーク接続部37を有する。
【0020】
制御部31は、CPU、ROM、RAMなどを有し、CPUがROMに格納された制御プログラムを実行することで、配車管理装置全体を制御する。また、制御部31は、記憶部35に登録された、配車システムのアプリケーションを実行し、タクシーに搭載されたタクシーメータ3に配車指示などを行う。
【0021】
表示部32は、タクシーメータ3の筐体前面に設けられたLCDからなり、各種の情報を表示する。無線通信モジュール33は、タクシーメータ3とデジタル無線で通信可能である。操作部34は、各種ボタンを有し、これらのボタンの押下を受け付ける。
【0022】
記憶部35には、後述するように、CPUによって実行される配車システムのアプリケーションが格納されている。データベース部36には、GPSデータを含む地図情報や、お客様の登録情報などが登録されている。ネットワーク接続部37は、インターネット等のネットワークに接続されており、迎車の予約などを受け付ける際、このネットワークに接続可能なお客様の通信端末と通信を行う。
【0023】
図2はタクシーメータ3の筐体前面に設けられた表示部12の画面を示す図である。表示部12の画面には、空車ボタン41、実車ボタン42、高速ボタン43、休憩ボタン44、貸切ボタン45の他、迎車時、迎車を表す文字表示部47、およびお客様の予約場所(目的地)の方向を表す方向指示表示部48(マーク)が表示されている。方向指示表示部48は、その中央に配置された矢印48aとその周囲の背景48bとからなる。ここで、表示部12はマーク表示手段に相当する。
【0024】
図3は車両の進行方向と目的地の指示方向との関係を示す図である。図3(A)は、矢印52で表される車両の進行方向に対し、目的地の方向が左右30度以内の範囲(角度範囲内)にある場合を示す。この場合、方向指示表示部48内の矢印48aは点灯表示される。図3(B)は、矢印52で表される車両の進行方向に対し、目的地の方向が左右30度を越えて60度以内の範囲(角度範囲内)にある場合を示す。この場合、方向指示表示部48内の矢印48aは点滅表示される。このように、異なる表示態様で方向指示表示部は表示される。図3(C)は、矢印52で表される車両の進行方向に対し、目的地の方向が左右60度を越える場合を示す。この場合、方向指示表示部48内の矢印48aは点滅表示された後、さらにブザー21が鳴動する。
【0025】
上記構成を有するタクシーメータ3の迎車時の動作を示す。図4はタクシーメータ3における迎車時の動作手順を示すフローチャートである。この動作プログラムは、タクシーメータ3の演算部11内のROMに格納されており、演算部11内のCPUによって周期的に実行される。
【0026】
まず、演算部11は、無線通信モジュール17を通じて、事務所側に設置された配車管理装置8から迎車情報を受信し、配車指示を受けたか否かを判別する(ステップS1)。迎車情報を受信していない場合、演算部11はそのまま本動作を終了する。
【0027】
一方、ステップS1で迎車情報を受信した場合、演算部11は、迎車情報に含まれる、お客様が指定した場所(目的地)のGPSデータと、車両(タクシー)の現在地(現在位置)のGPSデータとを比較する(ステップS2)。
【0028】
ステップS2の比較の結果、演算部11は、車両の進行方向に対する目的地方向の角度を算出する(ステップS3)。このステップS3の処理は方向算出手段に相当する。
【0029】
ここで、車両の進行方向は、GPS受信部19で時系列に検出される車両の現在位置の軌跡から求めてもよいし、車両データ入力部14に接続されるジャイロセンサなどのセンサ出力から求めてもよい。
【0030】
そして、演算部11は、この目的地方向の角度が予め設定された設定角度範囲d以下であるか否かを判別する(ステップS4)。このステップS4の処理は方向判別手段に相当する。この設定角度範囲d(第1の角度範囲)は、任意に設定可能であり、本実施形態では、左右30度の範囲に設定される(図3(A)参照)。
【0031】
目的地方向の角度が予め設定された設定角度範囲d以下である場合、演算部11は、方向指示表示部48内の矢印48aを点灯させる(ステップS5)。演算部11は、表示後、所定時間(例えば1秒)が経過するまで待つ(ステップS6)。この所定時間は、乗務員が視認可能な適当な時間に設定可能である。
【0032】
所定時間が経過すると、演算部11は、迎車状態であるか否かを判別する(ステップS7)。迎車状態である場合、ステップS2の処理に戻り、同様の処理を繰り返す。一方、ステップS7で迎車状態でない場合、演算部11は、方向指示表示部48を消灯する(ステップS8)。この後、演算部11は本動作を終了する。
【0033】
一方、ステップS4で、目的地方向の角度が予め設定された設定角度範囲dを越える場合、演算部11は、目的地方向の角度が予め設定された設定角度範囲e以下であるか否かを判別する(ステップS9)。この設定角度範囲e(第2の角度範囲)は、任意に設定可能であり、本実施形態では、左右60度の範囲に設定される(図3(B)参照)。
【0034】
目的地方向の角度が予め設定された設定角度範囲e以下である場合、演算部11は、方向指示表示部48内の矢印48aを点滅させる(ステップS10)。この後、演算部11は、ステップS6の処理に進む。
【0035】
また一方、ステップS9で、目的地方向の角度が予め設定された設定角度範囲eを越える場合、演算部11は、方向指示表示部48内の矢印48aを点滅させる(ステップS11)。そして、演算部11は、この表示後、所定時間tが経過するまで待つ(ステップS12)。この所定時間tは、乗務員が視認可能な適当な時間に設定可能であり、好ましくは1秒より長い時間に設定される。
【0036】
所定時間tが経過すると、演算部11は、音声出力部20を介してブザー21を鳴動させるとともに、事務所に設置された配車管理装置8に車両が目的地に向かっていない旨を連絡する(ステップS13)。この後、演算部11は、ステップS6の処理に進む。
【0037】
図5は配車管理装置8における迎車時の動作手順を示すフローチャートである。この動作プログラムは、配車管理装置8内の記憶部35に格納されており、制御部31によって周期的に実行される。
【0038】
まず、制御部31は、ネットワーク接続部37や操作部34を介して受け付けた迎車の予約があるか否かを判別する(ステップS21)。このステップS21の処理は迎車受付手段に相当する。迎車の予約がない場合、制御部31はそのまま本動作を終了する。
【0039】
一方、迎車の予約がある場合、制御部31は、無線通信モジュール33を通じてデータベース部36に登録された車両(タクシー)のうち、目的地に近いタクシーを特定する(ステップS22)。このステップS22の処理は車両特定手段に相当する。
【0040】
制御部31は、この特定されたタクシーに対し、データベース部36を検索して目的地のGPSデータを取得し、このGPSデータを含む迎車情報を送信して配車指示を行う(ステップS23)。
【0041】
この後、制御部31は、所定時間待機し(ステップS24)、無線通信モジュール33を通じて、配車指示を受けたタクシーのタクシーメータ3から目的地に向かっていない旨の連絡を受けたか否かを判別する(ステップS25)。連絡を受けていない場合、制御部31は、迎車が完了したものとして、本動作を終了する。一方、ステップS25で連絡を受けた場合、配車指示を取り下げ(ステップS26)、ステップS22の処理に戻る。
【0042】
このように、第1の実施形態のタクシーメータによれば、配車指示を受けた乗務員が現場(目的地)に到着する時間を短縮することができる。また、タクシーメータを見るだけで、目的地の方向などが簡単に分かるので、乗務員による迎車拒否の防止にも繋がる。
【0043】
(第2の実施形態)
前記第1の実施形態では、方向指示表示部48の矢印48aの点灯、点滅やブザー21の鳴動によって、車両の進行方向と目的地方向との関係を示した。第2の実施形態では、方向指示表示部48の背景48bの色を変化させることによって、車両の現在地から目的地までの距離を知らせる場合を示す。
【0044】
また、第2の実施形態におけるタクシーメータおよび配車管理装置は、前記第1の実施形態とほぼ同一の構成を有する。前記第1の実施形態と同一の構成要素については同一の符号を用いることで、その説明を省略する。
【0045】
図6は第2の実施形態のタクシーメータ3における表示部12の画面の遷移を示す図である。車両の現在位置から目的地までの距離が設定距離m(第2の距離)を越えており、目的地がとても遠い場合、図6(A)に示すように、方向指示表示部48の背景48bの色は青色(図中、間隔の粗い斜線)である(第2の表示態様)。また、車両の現在位置から目的地までの距離が設定距離m以下であって、設定距離mより短い設定距離n(第1の距離)を越えている場合、図6(B)に示すように、方向指示表示部48の背景48bの色は黄色(図中、間隔の細かい斜線)である(第1の表示態様)。さらに、車両の現在位置から目的地までの距離が設定距離n以下であって、目的地が近い場合、図6(C)に示すように、方向指示表示部48の背景48bの色は赤色(図中、黒)である。
【0046】
図7はタクシーメータ3における進行方向指示動作手順を示すフローチャートである。この動作プログラムは、タクシーメータ3の演算部11内のROMに格納されており、演算部11内のCPUによって実行される。
【0047】
まず、演算部11は、無線通信モジュール17を通じて、事務所側に設置された配車管理装置8から迎車情報を受信し、配車指示を受け付けたか否かを判別する(ステップS31)。迎車情報を受信していない場合、演算部11はそのまま本動作を終了する。
【0048】
一方、ステップS31で迎車情報を受信した場合、演算部11は、迎車情報に含まれる、お客様が指定した場所(目的地)のGPSデータと、車両(タクシー)の現在地のGPSデータとを比較する(ステップS32)。
【0049】
ステップS32の比較の結果、演算部11は、車両の進行方向に対する目的地方向角度を算出するとともに、車両の現在位置から目的地までの距離を算出する(ステップS33)。このステップS33の処理は距離算出手段に相当する。そして、演算部11は、算出された目的地までの距離が予め設定された設定距離n以下である(所定の距離内にある)か否かを判別する(ステップS34)。このステップS34の処理は距離判別手段に相当する。
【0050】
目的地までの距離が予め設定された設定距離n以下である場合、演算部11は、方向指示表示部48を表示するとともに、目的地の方向を表す矢印48aの周囲の背景48bを赤色(図6(C)参照)で表示する(ステップS35)。演算部11は、表示後、所定時間(例えば1秒)が経過するまで待つ(ステップS36)。この所定時間は、乗務員が視認可能な適当な時間に設定可能である。
【0051】
所定時間が経過すると、演算部11は、迎車状態であるか否かを判別する(ステップS37)。迎車状態である場合、ステップS32の処理に戻り、同様の処理を繰り返す。一方、ステップS37で迎車状態でない場合、演算部11は、方向指示表示部48を消灯する(ステップS38)。この後、演算部11は本動作を終了する。
【0052】
一方、ステップS34で、車両の現在位置から目的地までの距離が予め設定された設定距離nを越える場合、演算部11は、車両の現在位置から目的地までの距離が予め設定された設定距離m以下であるか否かを判別する(ステップS39)。
【0053】
車両の現在位置から目的地までの距離が予め設定された設定距離m以下である場合、演算部11は、方向指示表示部48を表示するとともに、矢印48aの周囲の背景48bの色を黄色(図6(B)参照)に変化させる(ステップS40)。この後、演算部11は、ステップS36の処理に進む。
【0054】
また、ステップS39で、車両の現在位置から目的地までの距離が予め設定された設定距離m以下でない場合、演算部11は、方向指示表示部48を表示するとともに、矢印48aの周囲の背景48bの色を青色(図6(A)参照)に変化させる(ステップS41)。この後、演算部11は、ステップS36の処理に進む。
【0055】
図8は配車管理装置8における迎車時の動作手順を示すフローチャートである。この動作プログラムは、配車管理装置8内の記憶部35に格納されており、制御部31によって周期的に実行される。
【0056】
まず、制御部31は、ネットワーク接続部37や操作部34を介して受け付けたお客様の迎車の予約があるか否かを判別する(ステップS51)。迎車の予約がない場合、制御部31はそのまま本動作を終了する。
【0057】
一方、迎車の予約がある場合、制御部31は、無線通信モジュール33を通じてデータベース部36に登録された車両(タクシー)のうち、目的地に近いタクシーを特定する(ステップS52)。制御部31は、この特定されたタクシーに対し、データベース部36を検索して目的地のGPSデータを取得し、このGPSデータを含む迎車情報を送信して配車指示を行う(ステップS53)。この後、制御部31は、本動作を終了する。
【0058】
このように、第2の実施形態のタクシーメータによれば、配車指示を受けた乗務員が現場(目的地)に到着する時間を短縮することができる。また、タクシーメータを見るだけで、目的地までの距離が簡単に分かるので、乗務員による迎車拒否の防止にも繋がる。
【0059】
なお、本発明は、上記実施形態の構成に限られるものではなく、本実施形態の構成が持つ機能が達成できる構成であればどのようなものであっても適用可能である。
【0060】
例えば、前記第1の実施形態における車両の進行方向と目的地方向との関係を表す表示と、前記第2の実施形態における目的地までの距離を表す表示とを組み合わせてもよい。つまり、第2の実施形態においても、方向指示表示部の矢印の色の変化や、ブザー21の鳴動、さらに、車両が目的地に向かっていない旨の連絡を行うようにしてもよい。
【0061】
また、前記第2の実施形態では、方向指示表示部の背景の色が3段階に変化する場合を示したが、4段階以上、あるいはグラデーションで徐々に色が変化するようにしてもよい。また、方向指示表示部の背景の色を変化させたが、その他の部分の色、たとえば矢印の色を変化させてもよい。
【0062】
また、上記実施形態では、目的地の方向を表すマークとして、矢印と背景からなる方向指示表示部が用いられたが、これに限られるものではなく、種々の表示態様で表示可能である。例えば、タクシーメータの画面の上下左右をそれぞれ北南西東の方位とみなし、画面の枠に近い位置に置かれた丸印などで目的地の方向を表示するようにしてもよい。
【0063】
本発明は、車両に搭載されたタクシーメータが迎車情報を受信する際、配車指示を受けた乗務員が目的地に到着する時間を短縮することができ、有用である。
【符号の説明】
【0064】
1 配車システム
3 タクシーメータ
8 配車管理装置
11 演算部
12 表示部
13、34 操作部
14 車両データ入力部
15 営業データ格納部
16 設定データ格納部
17、33 無線通信モジュール
18 外部インタフェース(I/F)
19 GPS受信部
20 音声出力部
21 ブザー
31 制御部
32 表示部
35 記憶部
36 データベース(DB)部
37 ネットワーク接続部
41 空車ボタン
42 実車ボタン
43 高速ボタン
44 休憩ボタン
45 貸切ボタン
48 方向指示表示部
48a、52 矢印
48b 背景
【特許請求の範囲】
【請求項1】
車両に搭載され、迎車情報を受信するタクシーメータであって、
前記迎車情報に含まれる目的地を取得する取得手段と、
前記車両の進行方向に対する前記目的地の方向を算出する方向算出手段と、
前記目的地の方向を示すマークを前記タクシーメータの画面に表示するマーク表示手段と、を備えることを特徴とするタクシーメータ。
【請求項2】
前記方向算出手段によって算出された目的地の方向が所定の角度範囲内にあるか否かを判別する方向判別手段を備え、
前記マーク表示手段は、前記目的地の方向が前記所定の角度範囲から外れる場合、前記画面に表示されるマークを、前記目的地の方向が前記所定の角度範囲内にある場合と異なる表示態様で表示することを特徴とする請求項1に記載のタクシーメータ。
【請求項3】
前記迎車情報に含まれる目的地を取得する取得手段と、
前記車両の現在位置から前記目的地までの距離を算出する距離算出手段と、
前記距離算出手段によって算出された目的地までの距離が所定の距離内にあるか否かを判別する距離判別手段とを備え、
前記目的地までの距離が前記所定の距離を越える場合、前記マーク表示手段は、前記画面に表示されるマークを、前記所定の距離内にある場合と異なる表示態様で表示することを特徴とする請求項1または2に記載のタクシーメータ。
【請求項4】
車両に搭載されたタクシーメータと前記車両を管理する配車管理装置とを備え、迎車を行う配車システムであって、
前記配車管理装置は、
迎車の予約を受け付け、迎車情報を取得する迎車受付手段と、
前記迎車受付手段によって迎車の予約が受け付けられた場合、前記迎車情報に含まれる目的地をもとに、車両を特定する車両特定手段と、
前記車両特定手段によって特定された車両に搭載されたタクシーメータに前記迎車情報を送信して配車指示を行う送信手段とを備え、
前記タクシーメータは、
前記配車管理装置から送信された迎車情報を受信する受信手段と、
前記迎車情報に含まれる目的地を取得する取得手段と、
前記車両の進行方向に対する前記目的地の方向を算出する方向算出手段と、
前記目的地の方向を示すマークを前記タクシーメータの画面に表示するマーク表示手段と、を備えることを特徴とする配車システム。
【請求項1】
車両に搭載され、迎車情報を受信するタクシーメータであって、
前記迎車情報に含まれる目的地を取得する取得手段と、
前記車両の進行方向に対する前記目的地の方向を算出する方向算出手段と、
前記目的地の方向を示すマークを前記タクシーメータの画面に表示するマーク表示手段と、を備えることを特徴とするタクシーメータ。
【請求項2】
前記方向算出手段によって算出された目的地の方向が所定の角度範囲内にあるか否かを判別する方向判別手段を備え、
前記マーク表示手段は、前記目的地の方向が前記所定の角度範囲から外れる場合、前記画面に表示されるマークを、前記目的地の方向が前記所定の角度範囲内にある場合と異なる表示態様で表示することを特徴とする請求項1に記載のタクシーメータ。
【請求項3】
前記迎車情報に含まれる目的地を取得する取得手段と、
前記車両の現在位置から前記目的地までの距離を算出する距離算出手段と、
前記距離算出手段によって算出された目的地までの距離が所定の距離内にあるか否かを判別する距離判別手段とを備え、
前記目的地までの距離が前記所定の距離を越える場合、前記マーク表示手段は、前記画面に表示されるマークを、前記所定の距離内にある場合と異なる表示態様で表示することを特徴とする請求項1または2に記載のタクシーメータ。
【請求項4】
車両に搭載されたタクシーメータと前記車両を管理する配車管理装置とを備え、迎車を行う配車システムであって、
前記配車管理装置は、
迎車の予約を受け付け、迎車情報を取得する迎車受付手段と、
前記迎車受付手段によって迎車の予約が受け付けられた場合、前記迎車情報に含まれる目的地をもとに、車両を特定する車両特定手段と、
前記車両特定手段によって特定された車両に搭載されたタクシーメータに前記迎車情報を送信して配車指示を行う送信手段とを備え、
前記タクシーメータは、
前記配車管理装置から送信された迎車情報を受信する受信手段と、
前記迎車情報に含まれる目的地を取得する取得手段と、
前記車両の進行方向に対する前記目的地の方向を算出する方向算出手段と、
前記目的地の方向を示すマークを前記タクシーメータの画面に表示するマーク表示手段と、を備えることを特徴とする配車システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−88935(P2013−88935A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−227291(P2011−227291)
【出願日】平成23年10月14日(2011.10.14)
【出願人】(501418498)矢崎エナジーシステム株式会社 (79)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月14日(2011.10.14)
【出願人】(501418498)矢崎エナジーシステム株式会社 (79)
【Fターム(参考)】
[ Back to top ]