
タグの方位及び距離検出装置並びに検出方法
【課題】RFIDタグの方位、及び、RFIDまでの距離を検出する検出装置を提供する。
【解決手段】所定の間隔を隔てて配置される第1及び第2のアンテナ11、21を経由して、波長が同じで可変の位相差を有する第1及び第2の送信電波を、RFIDタグ40に送信する。RFIDタグ40からの応答波における第1の送信電波と第2の送信電波との干渉と、位相差との関係から、RFIDタグ40の方位を検出する。双方の送信電波が干渉した状態で、第2の送信電波をON/OFFし、そのON/OFFの時刻と、応答電波に現れる変化の時刻との時間差から、RFIDタグ40とアンテナ11、21との距離を演算する。
【解決手段】所定の間隔を隔てて配置される第1及び第2のアンテナ11、21を経由して、波長が同じで可変の位相差を有する第1及び第2の送信電波を、RFIDタグ40に送信する。RFIDタグ40からの応答波における第1の送信電波と第2の送信電波との干渉と、位相差との関係から、RFIDタグ40の方位を検出する。双方の送信電波が干渉した状態で、第2の送信電波をON/OFFし、そのON/OFFの時刻と、応答電波に現れる変化の時刻との時間差から、RFIDタグ40とアンテナ11、21との距離を演算する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、タグの方位及び距離検出装置並びに検出方法に関し、更に詳しくは、RFIDタグの二次元的な位置を検出するのに好適な方位及び距離検出装置、並びに、方位及び距離検出方法に関する。
【背景技術】
【0002】
RFIDタグ(RFIDパッシブタグ)の位置を検出する手法が従来から提案されている。RFIDタグの位置検出には、RFIDタグから受信する電波の強度から算出する手法、位置情報を予め保持した複数のタグリーダ(アンテナ)の受信状態から算出する手法などが知られている。特許文献1には、2台のRFIDリーダが、互いに対向して配置された2つのアンテナをそれぞれ介して、双方のアンテナ間を通過するRFIDタグの位置を検出する位置検出装置が記載されている。
【0003】
特許文献1の位置検出装置では、2台のRFIDはそれぞれRFIDタグに送信電波を送出し、そのRFIDタグから受信した応答電波によって、RFIDタグの位置を検出する。まず、第1ステップで第1のRFIDリーダが、第1の減衰比を設定して第1のアンテナを経由して電波を送出し、RFIDタグから第1応答信号を受信する。次いで、第2ステップで第2のRFIDリーダが、第2の減衰比を設定して、第2のアンテナを経由して電波を送出し、RFIDタグから第2応答信号を受信する。次いで、第3ステップで、制御部が、第1及び第2応答信号の双方の信号強度が何れも所定のレベル以上であるか否かを判定する。第1〜第3の3つのステップが逐次繰り返される。
【0004】
2回目以降の第1ステップでは、先の第1ステップにおける第1の減衰比よりも大きな減衰比を用い、また、2回目以降の第2ステップでは、先の第2ステップにおける第2の減衰比よりも小さな減衰比を用いる。第3ステップで、信号強度が所定のレベル以上であると、RFIDリーダがRFIDタグを検出したと判定され、また、信号強度が所定のレベル以下であると、RFIDタグを検出できなかったと判定される。この位置検出装置では、第3ステップで双方のRFIDリーダがRFIDタグを検出したと判定されるまで、処理を繰り返す。双方のRFIDリーダがRFIDタグを検出したと判定されと、RFIDタグは、そのとき採用された減衰比に対応した位置にあると判定される。
【0005】
特許文献2には、格子状に配置した多数のアンテナを経由して、物品に添付したRFIDタグを検出することで、物品の位置を検出する物品位置検出システムが記載されている。このシステムでは、まず、アンテナが配置された領域内で、RFIDタグから応答信号を検出するアンテナを探し出す。次いで、FIDタグからの信号強度が最も大きなアンテナを特定し、そのアンテナと、その近傍の他の2つのアンテナとの間で、受信する信号強度を比較する。信号強度の比較結果から、これらアンテナのそれぞれとRFIDタグとの距離比率を計算し、その計算結果に基づいて、RFIDタグが添付された物品の詳細位置を検出する。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2006−275839号公報
【特許文献2】特開2007−121014号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1及び2に記載の位置検出装置では、位置検出の精度が、RFIDタグからの応答電波の信号強度に依存する。従って、RFIDタグの向きやタグ自体の性能が位置検出の精度に影響を与えるため、高い検出精度が得られ難いという問題がある。また、検出すべきタグの位置との関係で、アンテナの配置にも制約がある。応答電波の信号強度ではなく、応答電波の到達時間差から距離検出をする場合には、RFIDタグとRFIDリーダとの間で同期をとる必要性があることから、RFIDリーダからの電波送出に際して、赤外線や超音波をトリガーとして用いる必要があり、位置検出装置の構成が複雑になるという問題がある。
【0008】
本発明は、位置検出精度が、応答電波の信号強度に依存せず、従って、RFIDタグの向きや性能に依存しないため、高い精度で且つ簡易な構成でRFIDの方位やRFIDとの距離を検出できるRFIDタグの方位及び距離検出装置並びに方位及び距離検出方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するために、本発明は、第1のアンテナを経由してRFIDタグに所定の周波数を有する第1送信電波を送信する第1の送信機と、前記第1のアンテナと所定の距離を隔てて配置される第2のアンテナを経由して、前記RFIDタグに前記所定の周波数を有し且つ第1送信電波との間で可変の位相差を有する第2送信電波を送信する第2の送信機と、前記RFIDタグからの応答電波を受信する受信機と、前記位相差と、前記応答電波に含まれる第1送信電波と第2送信電波との干渉との関係に基づいて、前記RFIDタグの方位を検出する方位検出部とを備える、RFIDタグの方位検出装置を提供する。
【0010】
また、本発明は、第1のアンテナを経由してRFIDタグに所定の周波数を有する第1送信電波を送信する第1の送信機と、前記第1のアンテナと所定の距離を隔てて配置される第2のアンテナを経由して、前記RFIDタグに前記所定の周波数を有し且つ第1送信電波との間で可変の位相差を有する第2送信電波を送信する第2の送信機と、前記RFIDタグからの応答電波を受信する受信機と、前記RFIDタグの位置で前記第1送信電波と前記第2送信電波とが干渉した状態で、前記第1送信電波及び第2送信電波の一方の送信を制御して、前記RFIDタグから受信した応答電波に現れる変化を検出し、前記送信を制御した時刻から前記変化が検出される時刻までの経過時間に基づいて、前記第1又は第2のアンテナと前記RFIDタグとの間の距離を算出する制御演算装置とを備える、RFIDタグの距離検出装置を提供する。
【0011】
更に、本発明は、第1のアンテナを経由してRFIDタグに所定の周波数を有する第1送信電波を送信する第1の送信機と、前記第1のアンテナと所定の距離を隔てて配置される第2のアンテナを経由して、前記RFIDタグに前記所定の周波数を有し且つ第1送信電波と同期し、且つ、振幅が周期的に変化する第2送信電波を送信する第2の送信機と、前記RFIDタグからの応答電波を受信する受信機と、前記第1の送信電波と第2の送信電波の合成電波の包絡線と、前記応答電波の包絡線との間の位相差に基づいて前記第1又は第2のアンテナと前記RFIDタグとの間の距離を算出する制御演算装置とを備えるRFIDタグの距離検出装置を提供する。
【0012】
更に、本発明は、第1のアンテナを経由してRFIDタグに所定の周波数を有する第1送信電波を送信し、前記第1のアンテナと所定の距離を隔てて配置される第2のアンテナを経由して前記RFIDタグに、前記所定の周波数を有し且つ第1送信電波との間で可変の位相差を有する第2送信電波を送信し、前記RFIDタグからの応答電波を受信し、前記位相差と、前記応答電波に含まれる第1送信電波と第2送信電波との干渉との関係に基づいて、前記RFIDタグの方位を検出する、ことを特徴とするRFIDタグの方位検出方法を提供する。
【0013】
更に、本発明は、第1のアンテナを経由してRFIDタグに所定の周波数を有する第1送信電波を送信すると共に、前記第1のアンテナと所定の距離を隔てて配置される第2のアンテナを経由して前記RFIDタグに、前記所定の周波数を有し且つ第1送信電波との間で可変の位相差を有する第2送信電波を送信し、前記RFIDタグからの応答電波を受信し、前記RFIDタグの位置で前記第1送信電波と前記第2送信電波とが干渉した状態で、前記第1送信電波及び第2送信電波の一方の送信を制御して、前記RFIDタグから受信した応答電波に現れる変化を検出し、前記送信を制御した時刻から前記変化が検出される時刻までの経過時間に基づいて、前記第1又は第2のアンテナと前記RFIDタグとの間の距離を算出する、ことを特徴とするRFIDタグの距離検出方法を提供する。
【0014】
更に、本発明は、第1のアンテナを経由してRFIDタグに所定の周波数を有する第1送信電波を送信すると共に、前記第1のアンテナと所定の距離を隔てて配置される第2のアンテナを経由して前記RFIDタグに、前記所定の周波数を有し且つ第1送信電波と同期し、且つ、振幅が周期的に変化する第2送信電波を送信し、前記RFIDタグからの応答電波を受信し、前記第1の送信電波と第2の送信電波の合成電波の包絡線と、前記応答電波の包絡線との間の位相差に基づいて前記第1又は第2のアンテナと前記RFIDタグとの間の距離を算出する、ことを特徴とするRFIDタグの距離検出方法を提供する。
【発明の効果】
【0015】
本発明の方位検出装置及び方法、並びに、本発明の距離検出装置及び方法によると、方位又は距離検出の精度が応答信号における信号強度に依存しないので、精度が高い検出が可能になるという効果が得られる。
【図面の簡単な説明】
【0016】
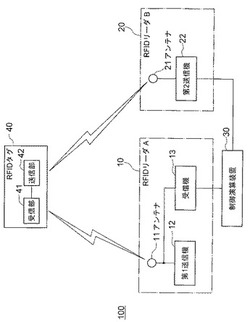
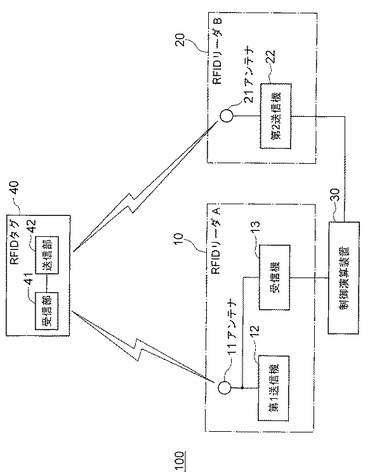
【図1】本発明の一実施形態に係る方位及び距離検出装置のブロック図。
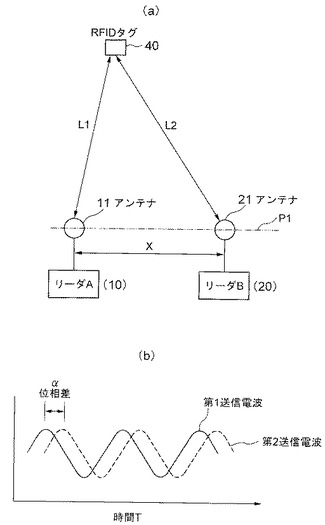
【図2】図1の検出装置における方位検出の原理を示すための図で、(a)は検出に際しての模式的平面図、(b)は送信電波の波形図。
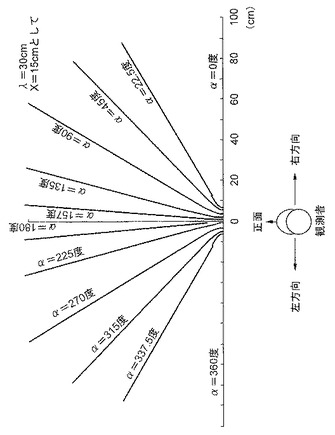
【図3】図1の検出装置で得られる方位と位相差との関係を示す線図。
【図4】図1の検出装置における第1の距離検出方法の原理を示す図で、(a)は送信電波の波形図、(b)は応答電波の波形図。
【図5】図1の検出装置における第2の距離検出方法の原理を示す図で、(a)は第1送信波の波形図、(b)は第2送信波の波形図、(c)は送信波合成後の波形図、(d)は合成送信波と応答電波の位相関係を示す波形図。
【図6】第1の計算モデルの、一部拡大図を含む模式的平面図。
【図7】第2の計算モデルの模式的平面図。
【発明を実施するための形態】
【0017】
以下、図面を参照して本発明の実施形態について詳細に説明する。図1は、本発明の一実施形態に係る、RFIDタグの方位及び距離検出装置100のブロック図である。方位及び距離検出装置100は、第1の送信機12、第2の送信機22、受信機13、及び、制御演算装置30を有する。第1の送信機12は、第1のアンテナ11を経由してRFIDタグ40に所定の周波数を有する第1送信電波を送信する。第2の送信機22は、第1のアンテナ11と所定の距離を隔てて配置される第2のアンテナ21を経由してRFIDタグ40に、所定の周波数を有し且つ第1送信電波との間で可変の位相差を有する第2送信電波を送信する。受信機13は、第1のアンテナ11を経由して、送信電波に応答するRFIDタグ40からの応答電波を受信する。なお、受信機13は、第2のアンテナ21又は別のアンテナを経由して応答電波を受信してもよい。RFIDタグ40は、RFIDリーダ10、20からの送信電波を受信する受信部41と、RFIDリーダ10、20に対して、受信電波の強度に対応した強度の応答電波を送信する送信部42とを有する。
【0018】
制御演算装置30は、第1送信機12及び第2送信機22を制御する。また、第1送信電波と第2送信電波の位相差と、応答電波に含まれる第1送信電波と第2送信電波との干渉との関係に基づいて、RFIDタグ40の方位を検出する方位検出部として機能する。制御演算装置30は、更に、RFIDタグ40の位置で第1送信電波と第2送信電波とが干渉した状態で、第1送信電波及び第2送信電波の一方の送信を制御して、RFIDタグ40から受信した応答電波に現れる変化を検出し、その送信を制御した時刻から応答電波に変化が検出される時刻までの経過時間に基づいて、第1のアンテナ11又は第2のアンテナ21とRFIDタグ40との間の距離を算出する。
【0019】
図1の実施形態では、第1のアンテナ11と、第1送信機12と、受信機13とが第1のRFIDリーダ10内に含まれる。第2送信機22は、第2のRFIDリーダ20内に含まれる。制御演算装置30は、リーダ外部に配置される。なお、本実施形態の構成は、この例には限られず、受信機13は、第2のRFIDリーダ20の内部に含まれても良く、或いは、RFIDリーダ10、20の外部に配置されても良い。各アンテナ11、21は、RFIDリーダ10、20の外部に配置されても良い。
【0020】
図2(a)は、上記実施形態に係る方位及び距離検出装置が、RFIDタグ(以下、単にタグとも呼ぶ)の方位を検出する際の原理を示す模式的平面図である。また、図2(b)は、第1送信電波と第2送信電波の波形図である。2つのアンテナ11、21は、所定の間隔(X)を隔てて配置される。なお、以下では、距離Xは双方のRFIDリーダ(以下、単にリーダとも呼ぶ)間の距離であるとして説明する。また、タグ40は、双方のリーダ10、20を結ぶ直線P1とある距離を隔てて存在しているものとし、この例では、リーダA(10)とタグ40との距離がL1、リーダB(20)とタグ40との間の距離がL2(L2>L1)である。この例では、双方のタグリーダ10、20は、観測者によって携帯され、RFIDタグの方位及び距離が観測者との関係で検出される。この場合、L1≒L2であり、L1=L2=Lと近似することも可能である。
【0021】
まず、リーダA(10)及びリーダB(20)の双方から、図2(b)に示す、同じ周波数を有する電波であって、双方の電波の位相差αを可変とした電波をタグ40に送信し、タグ40から受信する応答電波の強度を検出する。位相差αを変えてこれを繰り返し、受信する応答電波の信号強度が最小となるとき、又は、最大となるときのαを決定する。つまり、双方の送信電波がタグ40の位置で相互に干渉し、応答電波が消滅する位相差α、又は、応答電波の振幅が最大となる位相差αを求める。得られた位相差αから、直線P1と、例えばリーダB(20)とタグ40とを結ぶ直線との間の角度(θ:方位角)が下記のように求められる。
X・cosθ+λ・α/(360)=(λ/2)・n
但し、λは、双方の送信電波の波長であり、nは、0,1,2,3,...の整数である。nが奇数のときは、干渉により受信波が消滅し、nが偶数のときは、応答電波の強度が最大になる。
【0022】
ここで、X<λであれば、応答電波が消滅するときのnは、n=1である。また、周波数が例えば950MHzの電波を採用すると、その波長λは、λ≒30cmである。或いは、周波数が2.45GHzの電波を採用すると、λは、λ≒12cmである。X=λ/2とすると、直線P1上(横方向)が位相差0に相当する。
【0023】
図3に、方位検出の例を示す。同図では、λ=30cm、X=15cmとしたときに、タグ位置で発生する電波の干渉のため、応答電波が消滅するときの、位相差αと方位角θとの関係を示した。このように、双方の送信電波のタグ位置における干渉と、送信した電波の位相差αとの関係から、方位及び距離検出装置を携帯する観測者から見たタグの方位角θが得られる。
【0024】
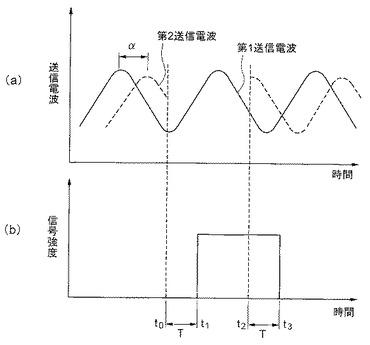
図2及び図4参照して、図1の検出装置における、タグと観測者との間の距離を検出する第1の距離検出方法の原理を説明する。図4(a)は、距離検出に用いる送信電波の波形を示している。図4(b)は、そのときの応答電波の信号強度の挙動を示している。距離検出に先立って、図2に示すように、リーダA(10)及びリーダB(20)の双方から、送信電波を送出し、双方の送信電波の干渉によって応答電波の強度が0になる位相差αを見つける。これは、先の方位の検出と同じである。次いで、得られた位相差αを固定して、リーダA及びBの一方から電波を継続的に送出し、他方の電波をON/OFFする。
【0025】
図4は、特に、第2の送信電波をONからOFFにしたとき、及び、OFFからONにしたときの各電波の波形を示している。第2の送信電波をONからOFFにしたときの時刻t0と、応答電波の波形が回復する時刻t1との時間差Tと、電波の伝播速度vとから、距離(L1+L2)=2L=vTが計算できる。或いは、送信電波をOFFからONにしたときの時刻t2と、応答電波が消去されるときの時刻t3の時間差Tと、電波の伝播速度vとからによっても同様に、距離2Lの計算が可能である。先に求めた方位角θとここで求めた距離2Lとから、RFIDタグ40の位置(方位及び距離)が検出できる。この検出方法を採用すると、受信する電波の強度自体を計測するものではないので、位置検出精度が、送出する電波の強度や、タグ40の向きなどの影響を受けることがない。また、タグ40とリーダ10、20との間で時間の同期を必要としないので、また、赤外線や超音波などを利用して送信電波の送出をトリガするなどの制御を要しないので、検出装置の構成が簡素になる。
【0026】
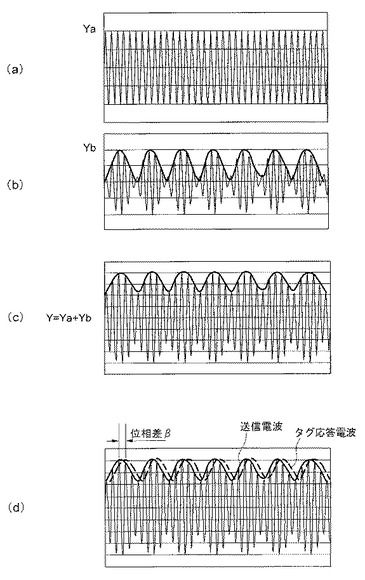
次に、図5を参照して、図1の検出装置における距離検出の別の手法である第2の距離検出方法を説明する。まず、リーダB(20)を停止させた状態で、リーダAから第1の送信電波である正弦波の電波:Ya=sin(ωt)を送出する。この波形を図5(a)に示した。次いで、リーダA(10)とRFIDタグ40の位置において送信電波強度が最大となる位相差αをもたせて、かつリーダAの波形の振幅を周期的に変化させた波形を有する第2の送信電波:Yb=sin(ω’t)・sin(ωt+α)をリーダBから送出する。図5(b)にこの波形を示した。リーダA及びリーダBから送出された送信電波はタグによって検知され、その合成波の信号強度は、Y=Ya+Ybで示される。タグは、双方の合成波形に応答する応答電波をリーダAの受信機13に返す。図5(c)に双方の送信電波の合成波形を示し、図5(d)に、送信電波と応答電波との位相差を示す。制御演算装置30は、図5(d)に示す、送信電波と応答電波との位相差βを検出し、電波の伝播時間、速度、及び、伝播距離の関係から、タグまでの距離Lを計算する。
【0027】
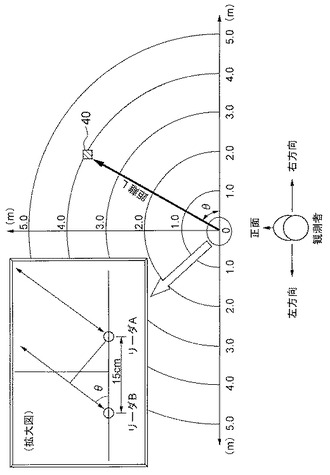
以下、具体例を挙げて計算手法を詳細に説明する。図6は、第1の計算モデルを示す、一部拡大図を含む平面模式図である。電波は、UHF帯を使用し、周波数f=950MHz(波長λ=30cm)とする。また、リーダA及びBは、一体になって、例えば観測者に携帯されるものとし、リーダAとリーダBの間隔Xを、X=15cm(=λ/2)とする。間隔Xは、検出するタグ40とリーダとの距離(L1=L2=L)に比して十分に小さい。
【0028】
[タグ方位の検出]
タグ方位の検出にあたり、リーダAから基調波の電波:Ya=C・sin(ωt)を送出し、リーダBから基調波に位相差を加えた電波:Yb=C・sin(ωt+α)を送出する。位相差α(°)を0≦α<360°の間で変化させ、タグからの応答電波の信号強度を計測する。タグからの応答電波の強度が最小(Min)となる位相差αminを計測し、また、タグからの応答電波の強度が最大(Max)となる位相差αmaxを計測する。なお、何れか一方のみでもよい。
【0029】
タグの方位角θと位相差αとの間には、応答電波の強度がMinの状態、及び、Maxの状態でそれぞれ、下記の関係が成立する。
X・cosθ+λ・αmin/360=λ/2 (電波強度Min)
X・cosθ+λ・αmax/360=0 or λ (電波強度Max)
ここで、0°≦θ<180°、0°≦α<360°である。
αmaxとαminとの間には、必ず180°の位相差があることを考慮し(αmax=αmin±180°)、応答電波強度が最大(Max)又は最小(Min)となるときの位相差αを定める。この例では、計測結果が、αmin=90°、αmax=270°である。上記関係式から、θ=60°が得られる。これは、観測者の正面の方向から右方向に30°離れた方向である。
【0030】
[タグまでの距離検出−1(第1の距離検出方法)]
方位検出のときに得られた基調波及び位相差の電波を利用する。ここで、方位検出の際に電波強度Minで得られた位相差αmin=90°を用いることとする。このとき、双方のリーダから送出された電波はタグの位置で干渉し、応答電波の強度がMinとなる。つまり、タグからの応答電波が実質的に消滅する。リーダAから継続的に基調波を送出し、リーダBからは位相差の電波の送出をON/OFFする。このON/OFFに依存して、受信電波がOFF/ONとなる。リーダBからの電波が送出/停止された時刻から、タグからの応答電波が停止/受信される時刻までの電波の伝播時間δ=T(図4(b))を計測する。ここで、電波の周波数f、伝播速度v、波長λ、伝播距離2L、及び、伝播時間δの間には、
v=f・λ及び
2・L=f・λ・δ
が成立するので、距離Lの計算が可能になる。例えば、伝播時間の計測結果δ=2.8×10−8から、タグまでの距離L=4mが得られる。
【0031】
[タグまでの距離検出−2(第2の距離検出方法)]
方位検出のときに得られた基調波及び位相差の電波を利用する。ここで、方位検出の際に電波強度Maxで得られた位相差αmax=270°を用いることとする。リーダAから送信される第1の送信電波(基調波)をYa=C・sin(ωt)とし、リーダBから送信される第2の送信電波をYb=C・sin(ω’t)・sin(ωt+α)とする。つまり、リーダBからの電波には、周波数ω’の振幅変化を付加する。このように作成した送信電波Ya及びYb(図5(a)及び(b))をタグに送信し、その応答電波(図5(c))を検出する。ここで、波長λ’が、RFIDの送信限界である、例えば500cmとなるように、ω’を、ω’=ω・λ/λ’=ω・30/500とする。図5(d)に示した、合成された送信電波の包絡線とタグからの応答電波の包絡線との間の位相差βを検出し、タグまでの距離Lを
L=λ’・β/360
と計算する。例えば、計測結果βがβ=288°であれば、タグまでの距離Lは、L=4mと得られる。
【0032】
上記方位の検出と、距離検出−1又は距離検出−2の結果とから、図6において、タグは、RFIDリーダを運搬する観測者の正面から右方向に30°離れた方位にあり(θ=60°)、且つ、それまでの距離Lが4mと得られる(L=4m)。
【0033】
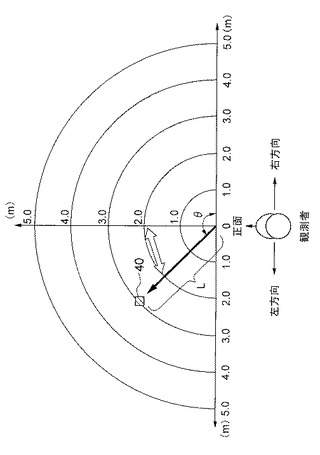
図7は、計算に使用した第2のモデル例を示す。この例では、RFIDタグ40は、観測者の正面から左方向に45°離れた方位にあり、観測者から3mの距離にある。使用する送信電波の基調波は、第1のモデル(図6)と同じ、f=950MHz(λ=30cm)、X=15cmとする。この場合に、方位検出を行うと、αmin=307°、αmax=127°が得られる。その結果、方位角θとしてθ=135°が得られる。つまり、図7に示した観測者の正面方向から左に45°離れた方向にあることが検出される。また、距離検出−1では、第1のモデルと同じ電波を使用して、δ=2.1×10−8が得られ、これからL=3mが得られる。距離検出−2では、同様に第1のモデルと同じ電波を使用し、β=216°、L=3mが得られる。
【0034】
本発明のRFIDタグの方位検出装置、及び、距離検出装置は、例えば、市街地に設置された設備に取り付けられたタグを検出することに利用できる。例えば視覚障害者が、これら検出装置を携帯することにより、視覚障害者は、歩行経路中の障害物を容易に検出できる。あらかじめ歩行ルートにタグを取付けておけば、歩行ルートの誘導システムの構築、また、空港などの通路のガイドなどにも利用可能である。更には、特定の設備にのみ取り付けて、その目印などに利用できる。
【0035】
上記実施形態の方位検出では、位置検出の精度は、応答電波の信号強度に依存しないので、タグの向きや、タグの性能などによって影響を受けることがない。また、本発明の距離検出方法は、必ずしも本発明の方位検出と組み合わせて使用する必要はなく、それぞれ単独で使用可能である。しかし、本発明の方位検出と組み合わせると、方位検出の結果がそのまま利用できる利点がある。本発明の第2の距離検出方法によると、送信電波の基調波の波長とは独立に、包絡線の波長が選定できる。このため、ω’をタグの最大通信可能距離に適合させた波長に選定すると共に、アンテナ間の間隔をこれとは独立に設定できる。
【0036】
本発明の方位検出装置、及び、距離検出装置は、必ずしも、既存のRFIDリーダの使用を前提としない。しかし、既存のRFIDリーダを利用することにより、装置開発が容易になる。
【0037】
本発明を特別に示し且つ例示的な実施形態を参照して説明したが、本発明は、その実施形態及びその変形に限定されるものではない。当業者に明らかなように、本発明は、添付の特許請求の範囲に規定される本発明の精神及び範囲を逸脱することなく、種々の変更が可能である。
【符号の説明】
【0038】
100:方位及び距離検出装置
10:RFIDリーダ(リーダA)
11:第1アンテナ
12:第1送信機
13:受信機
20:RFIDリーダ(リーダB)
21:第2アンテナ
22:第2送信機
30:制御演算装置
40:RFIDタグ(タグ)
41:受信部
42:送信部
【技術分野】
【0001】
本発明は、タグの方位及び距離検出装置並びに検出方法に関し、更に詳しくは、RFIDタグの二次元的な位置を検出するのに好適な方位及び距離検出装置、並びに、方位及び距離検出方法に関する。
【背景技術】
【0002】
RFIDタグ(RFIDパッシブタグ)の位置を検出する手法が従来から提案されている。RFIDタグの位置検出には、RFIDタグから受信する電波の強度から算出する手法、位置情報を予め保持した複数のタグリーダ(アンテナ)の受信状態から算出する手法などが知られている。特許文献1には、2台のRFIDリーダが、互いに対向して配置された2つのアンテナをそれぞれ介して、双方のアンテナ間を通過するRFIDタグの位置を検出する位置検出装置が記載されている。
【0003】
特許文献1の位置検出装置では、2台のRFIDはそれぞれRFIDタグに送信電波を送出し、そのRFIDタグから受信した応答電波によって、RFIDタグの位置を検出する。まず、第1ステップで第1のRFIDリーダが、第1の減衰比を設定して第1のアンテナを経由して電波を送出し、RFIDタグから第1応答信号を受信する。次いで、第2ステップで第2のRFIDリーダが、第2の減衰比を設定して、第2のアンテナを経由して電波を送出し、RFIDタグから第2応答信号を受信する。次いで、第3ステップで、制御部が、第1及び第2応答信号の双方の信号強度が何れも所定のレベル以上であるか否かを判定する。第1〜第3の3つのステップが逐次繰り返される。
【0004】
2回目以降の第1ステップでは、先の第1ステップにおける第1の減衰比よりも大きな減衰比を用い、また、2回目以降の第2ステップでは、先の第2ステップにおける第2の減衰比よりも小さな減衰比を用いる。第3ステップで、信号強度が所定のレベル以上であると、RFIDリーダがRFIDタグを検出したと判定され、また、信号強度が所定のレベル以下であると、RFIDタグを検出できなかったと判定される。この位置検出装置では、第3ステップで双方のRFIDリーダがRFIDタグを検出したと判定されるまで、処理を繰り返す。双方のRFIDリーダがRFIDタグを検出したと判定されと、RFIDタグは、そのとき採用された減衰比に対応した位置にあると判定される。
【0005】
特許文献2には、格子状に配置した多数のアンテナを経由して、物品に添付したRFIDタグを検出することで、物品の位置を検出する物品位置検出システムが記載されている。このシステムでは、まず、アンテナが配置された領域内で、RFIDタグから応答信号を検出するアンテナを探し出す。次いで、FIDタグからの信号強度が最も大きなアンテナを特定し、そのアンテナと、その近傍の他の2つのアンテナとの間で、受信する信号強度を比較する。信号強度の比較結果から、これらアンテナのそれぞれとRFIDタグとの距離比率を計算し、その計算結果に基づいて、RFIDタグが添付された物品の詳細位置を検出する。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2006−275839号公報
【特許文献2】特開2007−121014号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1及び2に記載の位置検出装置では、位置検出の精度が、RFIDタグからの応答電波の信号強度に依存する。従って、RFIDタグの向きやタグ自体の性能が位置検出の精度に影響を与えるため、高い検出精度が得られ難いという問題がある。また、検出すべきタグの位置との関係で、アンテナの配置にも制約がある。応答電波の信号強度ではなく、応答電波の到達時間差から距離検出をする場合には、RFIDタグとRFIDリーダとの間で同期をとる必要性があることから、RFIDリーダからの電波送出に際して、赤外線や超音波をトリガーとして用いる必要があり、位置検出装置の構成が複雑になるという問題がある。
【0008】
本発明は、位置検出精度が、応答電波の信号強度に依存せず、従って、RFIDタグの向きや性能に依存しないため、高い精度で且つ簡易な構成でRFIDの方位やRFIDとの距離を検出できるRFIDタグの方位及び距離検出装置並びに方位及び距離検出方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するために、本発明は、第1のアンテナを経由してRFIDタグに所定の周波数を有する第1送信電波を送信する第1の送信機と、前記第1のアンテナと所定の距離を隔てて配置される第2のアンテナを経由して、前記RFIDタグに前記所定の周波数を有し且つ第1送信電波との間で可変の位相差を有する第2送信電波を送信する第2の送信機と、前記RFIDタグからの応答電波を受信する受信機と、前記位相差と、前記応答電波に含まれる第1送信電波と第2送信電波との干渉との関係に基づいて、前記RFIDタグの方位を検出する方位検出部とを備える、RFIDタグの方位検出装置を提供する。
【0010】
また、本発明は、第1のアンテナを経由してRFIDタグに所定の周波数を有する第1送信電波を送信する第1の送信機と、前記第1のアンテナと所定の距離を隔てて配置される第2のアンテナを経由して、前記RFIDタグに前記所定の周波数を有し且つ第1送信電波との間で可変の位相差を有する第2送信電波を送信する第2の送信機と、前記RFIDタグからの応答電波を受信する受信機と、前記RFIDタグの位置で前記第1送信電波と前記第2送信電波とが干渉した状態で、前記第1送信電波及び第2送信電波の一方の送信を制御して、前記RFIDタグから受信した応答電波に現れる変化を検出し、前記送信を制御した時刻から前記変化が検出される時刻までの経過時間に基づいて、前記第1又は第2のアンテナと前記RFIDタグとの間の距離を算出する制御演算装置とを備える、RFIDタグの距離検出装置を提供する。
【0011】
更に、本発明は、第1のアンテナを経由してRFIDタグに所定の周波数を有する第1送信電波を送信する第1の送信機と、前記第1のアンテナと所定の距離を隔てて配置される第2のアンテナを経由して、前記RFIDタグに前記所定の周波数を有し且つ第1送信電波と同期し、且つ、振幅が周期的に変化する第2送信電波を送信する第2の送信機と、前記RFIDタグからの応答電波を受信する受信機と、前記第1の送信電波と第2の送信電波の合成電波の包絡線と、前記応答電波の包絡線との間の位相差に基づいて前記第1又は第2のアンテナと前記RFIDタグとの間の距離を算出する制御演算装置とを備えるRFIDタグの距離検出装置を提供する。
【0012】
更に、本発明は、第1のアンテナを経由してRFIDタグに所定の周波数を有する第1送信電波を送信し、前記第1のアンテナと所定の距離を隔てて配置される第2のアンテナを経由して前記RFIDタグに、前記所定の周波数を有し且つ第1送信電波との間で可変の位相差を有する第2送信電波を送信し、前記RFIDタグからの応答電波を受信し、前記位相差と、前記応答電波に含まれる第1送信電波と第2送信電波との干渉との関係に基づいて、前記RFIDタグの方位を検出する、ことを特徴とするRFIDタグの方位検出方法を提供する。
【0013】
更に、本発明は、第1のアンテナを経由してRFIDタグに所定の周波数を有する第1送信電波を送信すると共に、前記第1のアンテナと所定の距離を隔てて配置される第2のアンテナを経由して前記RFIDタグに、前記所定の周波数を有し且つ第1送信電波との間で可変の位相差を有する第2送信電波を送信し、前記RFIDタグからの応答電波を受信し、前記RFIDタグの位置で前記第1送信電波と前記第2送信電波とが干渉した状態で、前記第1送信電波及び第2送信電波の一方の送信を制御して、前記RFIDタグから受信した応答電波に現れる変化を検出し、前記送信を制御した時刻から前記変化が検出される時刻までの経過時間に基づいて、前記第1又は第2のアンテナと前記RFIDタグとの間の距離を算出する、ことを特徴とするRFIDタグの距離検出方法を提供する。
【0014】
更に、本発明は、第1のアンテナを経由してRFIDタグに所定の周波数を有する第1送信電波を送信すると共に、前記第1のアンテナと所定の距離を隔てて配置される第2のアンテナを経由して前記RFIDタグに、前記所定の周波数を有し且つ第1送信電波と同期し、且つ、振幅が周期的に変化する第2送信電波を送信し、前記RFIDタグからの応答電波を受信し、前記第1の送信電波と第2の送信電波の合成電波の包絡線と、前記応答電波の包絡線との間の位相差に基づいて前記第1又は第2のアンテナと前記RFIDタグとの間の距離を算出する、ことを特徴とするRFIDタグの距離検出方法を提供する。
【発明の効果】
【0015】
本発明の方位検出装置及び方法、並びに、本発明の距離検出装置及び方法によると、方位又は距離検出の精度が応答信号における信号強度に依存しないので、精度が高い検出が可能になるという効果が得られる。
【図面の簡単な説明】
【0016】
【図1】本発明の一実施形態に係る方位及び距離検出装置のブロック図。
【図2】図1の検出装置における方位検出の原理を示すための図で、(a)は検出に際しての模式的平面図、(b)は送信電波の波形図。
【図3】図1の検出装置で得られる方位と位相差との関係を示す線図。
【図4】図1の検出装置における第1の距離検出方法の原理を示す図で、(a)は送信電波の波形図、(b)は応答電波の波形図。
【図5】図1の検出装置における第2の距離検出方法の原理を示す図で、(a)は第1送信波の波形図、(b)は第2送信波の波形図、(c)は送信波合成後の波形図、(d)は合成送信波と応答電波の位相関係を示す波形図。
【図6】第1の計算モデルの、一部拡大図を含む模式的平面図。
【図7】第2の計算モデルの模式的平面図。
【発明を実施するための形態】
【0017】
以下、図面を参照して本発明の実施形態について詳細に説明する。図1は、本発明の一実施形態に係る、RFIDタグの方位及び距離検出装置100のブロック図である。方位及び距離検出装置100は、第1の送信機12、第2の送信機22、受信機13、及び、制御演算装置30を有する。第1の送信機12は、第1のアンテナ11を経由してRFIDタグ40に所定の周波数を有する第1送信電波を送信する。第2の送信機22は、第1のアンテナ11と所定の距離を隔てて配置される第2のアンテナ21を経由してRFIDタグ40に、所定の周波数を有し且つ第1送信電波との間で可変の位相差を有する第2送信電波を送信する。受信機13は、第1のアンテナ11を経由して、送信電波に応答するRFIDタグ40からの応答電波を受信する。なお、受信機13は、第2のアンテナ21又は別のアンテナを経由して応答電波を受信してもよい。RFIDタグ40は、RFIDリーダ10、20からの送信電波を受信する受信部41と、RFIDリーダ10、20に対して、受信電波の強度に対応した強度の応答電波を送信する送信部42とを有する。
【0018】
制御演算装置30は、第1送信機12及び第2送信機22を制御する。また、第1送信電波と第2送信電波の位相差と、応答電波に含まれる第1送信電波と第2送信電波との干渉との関係に基づいて、RFIDタグ40の方位を検出する方位検出部として機能する。制御演算装置30は、更に、RFIDタグ40の位置で第1送信電波と第2送信電波とが干渉した状態で、第1送信電波及び第2送信電波の一方の送信を制御して、RFIDタグ40から受信した応答電波に現れる変化を検出し、その送信を制御した時刻から応答電波に変化が検出される時刻までの経過時間に基づいて、第1のアンテナ11又は第2のアンテナ21とRFIDタグ40との間の距離を算出する。
【0019】
図1の実施形態では、第1のアンテナ11と、第1送信機12と、受信機13とが第1のRFIDリーダ10内に含まれる。第2送信機22は、第2のRFIDリーダ20内に含まれる。制御演算装置30は、リーダ外部に配置される。なお、本実施形態の構成は、この例には限られず、受信機13は、第2のRFIDリーダ20の内部に含まれても良く、或いは、RFIDリーダ10、20の外部に配置されても良い。各アンテナ11、21は、RFIDリーダ10、20の外部に配置されても良い。
【0020】
図2(a)は、上記実施形態に係る方位及び距離検出装置が、RFIDタグ(以下、単にタグとも呼ぶ)の方位を検出する際の原理を示す模式的平面図である。また、図2(b)は、第1送信電波と第2送信電波の波形図である。2つのアンテナ11、21は、所定の間隔(X)を隔てて配置される。なお、以下では、距離Xは双方のRFIDリーダ(以下、単にリーダとも呼ぶ)間の距離であるとして説明する。また、タグ40は、双方のリーダ10、20を結ぶ直線P1とある距離を隔てて存在しているものとし、この例では、リーダA(10)とタグ40との距離がL1、リーダB(20)とタグ40との間の距離がL2(L2>L1)である。この例では、双方のタグリーダ10、20は、観測者によって携帯され、RFIDタグの方位及び距離が観測者との関係で検出される。この場合、L1≒L2であり、L1=L2=Lと近似することも可能である。
【0021】
まず、リーダA(10)及びリーダB(20)の双方から、図2(b)に示す、同じ周波数を有する電波であって、双方の電波の位相差αを可変とした電波をタグ40に送信し、タグ40から受信する応答電波の強度を検出する。位相差αを変えてこれを繰り返し、受信する応答電波の信号強度が最小となるとき、又は、最大となるときのαを決定する。つまり、双方の送信電波がタグ40の位置で相互に干渉し、応答電波が消滅する位相差α、又は、応答電波の振幅が最大となる位相差αを求める。得られた位相差αから、直線P1と、例えばリーダB(20)とタグ40とを結ぶ直線との間の角度(θ:方位角)が下記のように求められる。
X・cosθ+λ・α/(360)=(λ/2)・n
但し、λは、双方の送信電波の波長であり、nは、0,1,2,3,...の整数である。nが奇数のときは、干渉により受信波が消滅し、nが偶数のときは、応答電波の強度が最大になる。
【0022】
ここで、X<λであれば、応答電波が消滅するときのnは、n=1である。また、周波数が例えば950MHzの電波を採用すると、その波長λは、λ≒30cmである。或いは、周波数が2.45GHzの電波を採用すると、λは、λ≒12cmである。X=λ/2とすると、直線P1上(横方向)が位相差0に相当する。
【0023】
図3に、方位検出の例を示す。同図では、λ=30cm、X=15cmとしたときに、タグ位置で発生する電波の干渉のため、応答電波が消滅するときの、位相差αと方位角θとの関係を示した。このように、双方の送信電波のタグ位置における干渉と、送信した電波の位相差αとの関係から、方位及び距離検出装置を携帯する観測者から見たタグの方位角θが得られる。
【0024】
図2及び図4参照して、図1の検出装置における、タグと観測者との間の距離を検出する第1の距離検出方法の原理を説明する。図4(a)は、距離検出に用いる送信電波の波形を示している。図4(b)は、そのときの応答電波の信号強度の挙動を示している。距離検出に先立って、図2に示すように、リーダA(10)及びリーダB(20)の双方から、送信電波を送出し、双方の送信電波の干渉によって応答電波の強度が0になる位相差αを見つける。これは、先の方位の検出と同じである。次いで、得られた位相差αを固定して、リーダA及びBの一方から電波を継続的に送出し、他方の電波をON/OFFする。
【0025】
図4は、特に、第2の送信電波をONからOFFにしたとき、及び、OFFからONにしたときの各電波の波形を示している。第2の送信電波をONからOFFにしたときの時刻t0と、応答電波の波形が回復する時刻t1との時間差Tと、電波の伝播速度vとから、距離(L1+L2)=2L=vTが計算できる。或いは、送信電波をOFFからONにしたときの時刻t2と、応答電波が消去されるときの時刻t3の時間差Tと、電波の伝播速度vとからによっても同様に、距離2Lの計算が可能である。先に求めた方位角θとここで求めた距離2Lとから、RFIDタグ40の位置(方位及び距離)が検出できる。この検出方法を採用すると、受信する電波の強度自体を計測するものではないので、位置検出精度が、送出する電波の強度や、タグ40の向きなどの影響を受けることがない。また、タグ40とリーダ10、20との間で時間の同期を必要としないので、また、赤外線や超音波などを利用して送信電波の送出をトリガするなどの制御を要しないので、検出装置の構成が簡素になる。
【0026】
次に、図5を参照して、図1の検出装置における距離検出の別の手法である第2の距離検出方法を説明する。まず、リーダB(20)を停止させた状態で、リーダAから第1の送信電波である正弦波の電波:Ya=sin(ωt)を送出する。この波形を図5(a)に示した。次いで、リーダA(10)とRFIDタグ40の位置において送信電波強度が最大となる位相差αをもたせて、かつリーダAの波形の振幅を周期的に変化させた波形を有する第2の送信電波:Yb=sin(ω’t)・sin(ωt+α)をリーダBから送出する。図5(b)にこの波形を示した。リーダA及びリーダBから送出された送信電波はタグによって検知され、その合成波の信号強度は、Y=Ya+Ybで示される。タグは、双方の合成波形に応答する応答電波をリーダAの受信機13に返す。図5(c)に双方の送信電波の合成波形を示し、図5(d)に、送信電波と応答電波との位相差を示す。制御演算装置30は、図5(d)に示す、送信電波と応答電波との位相差βを検出し、電波の伝播時間、速度、及び、伝播距離の関係から、タグまでの距離Lを計算する。
【0027】
以下、具体例を挙げて計算手法を詳細に説明する。図6は、第1の計算モデルを示す、一部拡大図を含む平面模式図である。電波は、UHF帯を使用し、周波数f=950MHz(波長λ=30cm)とする。また、リーダA及びBは、一体になって、例えば観測者に携帯されるものとし、リーダAとリーダBの間隔Xを、X=15cm(=λ/2)とする。間隔Xは、検出するタグ40とリーダとの距離(L1=L2=L)に比して十分に小さい。
【0028】
[タグ方位の検出]
タグ方位の検出にあたり、リーダAから基調波の電波:Ya=C・sin(ωt)を送出し、リーダBから基調波に位相差を加えた電波:Yb=C・sin(ωt+α)を送出する。位相差α(°)を0≦α<360°の間で変化させ、タグからの応答電波の信号強度を計測する。タグからの応答電波の強度が最小(Min)となる位相差αminを計測し、また、タグからの応答電波の強度が最大(Max)となる位相差αmaxを計測する。なお、何れか一方のみでもよい。
【0029】
タグの方位角θと位相差αとの間には、応答電波の強度がMinの状態、及び、Maxの状態でそれぞれ、下記の関係が成立する。
X・cosθ+λ・αmin/360=λ/2 (電波強度Min)
X・cosθ+λ・αmax/360=0 or λ (電波強度Max)
ここで、0°≦θ<180°、0°≦α<360°である。
αmaxとαminとの間には、必ず180°の位相差があることを考慮し(αmax=αmin±180°)、応答電波強度が最大(Max)又は最小(Min)となるときの位相差αを定める。この例では、計測結果が、αmin=90°、αmax=270°である。上記関係式から、θ=60°が得られる。これは、観測者の正面の方向から右方向に30°離れた方向である。
【0030】
[タグまでの距離検出−1(第1の距離検出方法)]
方位検出のときに得られた基調波及び位相差の電波を利用する。ここで、方位検出の際に電波強度Minで得られた位相差αmin=90°を用いることとする。このとき、双方のリーダから送出された電波はタグの位置で干渉し、応答電波の強度がMinとなる。つまり、タグからの応答電波が実質的に消滅する。リーダAから継続的に基調波を送出し、リーダBからは位相差の電波の送出をON/OFFする。このON/OFFに依存して、受信電波がOFF/ONとなる。リーダBからの電波が送出/停止された時刻から、タグからの応答電波が停止/受信される時刻までの電波の伝播時間δ=T(図4(b))を計測する。ここで、電波の周波数f、伝播速度v、波長λ、伝播距離2L、及び、伝播時間δの間には、
v=f・λ及び
2・L=f・λ・δ
が成立するので、距離Lの計算が可能になる。例えば、伝播時間の計測結果δ=2.8×10−8から、タグまでの距離L=4mが得られる。
【0031】
[タグまでの距離検出−2(第2の距離検出方法)]
方位検出のときに得られた基調波及び位相差の電波を利用する。ここで、方位検出の際に電波強度Maxで得られた位相差αmax=270°を用いることとする。リーダAから送信される第1の送信電波(基調波)をYa=C・sin(ωt)とし、リーダBから送信される第2の送信電波をYb=C・sin(ω’t)・sin(ωt+α)とする。つまり、リーダBからの電波には、周波数ω’の振幅変化を付加する。このように作成した送信電波Ya及びYb(図5(a)及び(b))をタグに送信し、その応答電波(図5(c))を検出する。ここで、波長λ’が、RFIDの送信限界である、例えば500cmとなるように、ω’を、ω’=ω・λ/λ’=ω・30/500とする。図5(d)に示した、合成された送信電波の包絡線とタグからの応答電波の包絡線との間の位相差βを検出し、タグまでの距離Lを
L=λ’・β/360
と計算する。例えば、計測結果βがβ=288°であれば、タグまでの距離Lは、L=4mと得られる。
【0032】
上記方位の検出と、距離検出−1又は距離検出−2の結果とから、図6において、タグは、RFIDリーダを運搬する観測者の正面から右方向に30°離れた方位にあり(θ=60°)、且つ、それまでの距離Lが4mと得られる(L=4m)。
【0033】
図7は、計算に使用した第2のモデル例を示す。この例では、RFIDタグ40は、観測者の正面から左方向に45°離れた方位にあり、観測者から3mの距離にある。使用する送信電波の基調波は、第1のモデル(図6)と同じ、f=950MHz(λ=30cm)、X=15cmとする。この場合に、方位検出を行うと、αmin=307°、αmax=127°が得られる。その結果、方位角θとしてθ=135°が得られる。つまり、図7に示した観測者の正面方向から左に45°離れた方向にあることが検出される。また、距離検出−1では、第1のモデルと同じ電波を使用して、δ=2.1×10−8が得られ、これからL=3mが得られる。距離検出−2では、同様に第1のモデルと同じ電波を使用し、β=216°、L=3mが得られる。
【0034】
本発明のRFIDタグの方位検出装置、及び、距離検出装置は、例えば、市街地に設置された設備に取り付けられたタグを検出することに利用できる。例えば視覚障害者が、これら検出装置を携帯することにより、視覚障害者は、歩行経路中の障害物を容易に検出できる。あらかじめ歩行ルートにタグを取付けておけば、歩行ルートの誘導システムの構築、また、空港などの通路のガイドなどにも利用可能である。更には、特定の設備にのみ取り付けて、その目印などに利用できる。
【0035】
上記実施形態の方位検出では、位置検出の精度は、応答電波の信号強度に依存しないので、タグの向きや、タグの性能などによって影響を受けることがない。また、本発明の距離検出方法は、必ずしも本発明の方位検出と組み合わせて使用する必要はなく、それぞれ単独で使用可能である。しかし、本発明の方位検出と組み合わせると、方位検出の結果がそのまま利用できる利点がある。本発明の第2の距離検出方法によると、送信電波の基調波の波長とは独立に、包絡線の波長が選定できる。このため、ω’をタグの最大通信可能距離に適合させた波長に選定すると共に、アンテナ間の間隔をこれとは独立に設定できる。
【0036】
本発明の方位検出装置、及び、距離検出装置は、必ずしも、既存のRFIDリーダの使用を前提としない。しかし、既存のRFIDリーダを利用することにより、装置開発が容易になる。
【0037】
本発明を特別に示し且つ例示的な実施形態を参照して説明したが、本発明は、その実施形態及びその変形に限定されるものではない。当業者に明らかなように、本発明は、添付の特許請求の範囲に規定される本発明の精神及び範囲を逸脱することなく、種々の変更が可能である。
【符号の説明】
【0038】
100:方位及び距離検出装置
10:RFIDリーダ(リーダA)
11:第1アンテナ
12:第1送信機
13:受信機
20:RFIDリーダ(リーダB)
21:第2アンテナ
22:第2送信機
30:制御演算装置
40:RFIDタグ(タグ)
41:受信部
42:送信部
【特許請求の範囲】
【請求項1】
第1のアンテナを経由してRFIDタグに所定の周波数を有する第1送信電波を送信する第1の送信機と、
前記第1のアンテナと所定の距離を隔てて配置される第2のアンテナを経由して前記RFIDタグに、前記所定の周波数を有し且つ第1送信電波との間で可変の位相差を有する第2送信電波を送信する第2の送信機と、
前記RFIDタグからの応答電波を受信する受信機と、
前記位相差と、前記応答電波に含まれる第1送信電波と第2送信電波との干渉との関係に基づいて、前記RFIDタグの方位を検出する方位検出部とを備える、RFIDタグの方位検出装置。
【請求項2】
第1のアンテナを経由してRFIDタグに所定の周波数を有する第1送信電波を送信する第1の送信機と、
前記第1のアンテナと所定の距離を隔てて配置される第2のアンテナを経由して前記RFIDタグに、前記所定の周波数を有し且つ第1送信電波との間で可変の位相差を有する第2送信電波を送信する第2の送信機と、
前記RFIDタグからの応答電波を受信する受信機と、
前記RFIDタグの位置で前記第1送信電波と前記第2送信電波とが干渉した状態で、前記第1送信電波及び第2送信電波の一方の送信を制御して、前記RFIDタグから受信した応答電波に現れる変化を検出し、前記送信を制御した時刻から前記変化が検出される時刻までの経過時間に基づいて、前記第1又は第2のアンテナと前記RFIDタグとの間の距離を算出する制御演算装置とを備える、RFIDタグの距離検出装置。
【請求項3】
第1のアンテナを経由してRFIDタグに所定の周波数を有する第1送信電波を送信する第1の送信機と、
前記第1のアンテナと所定の距離を隔てて配置される第2のアンテナを経由して前記RFIDタグに、前記所定の周波数を有し、前記第1送信電波と同期し、且つ、振幅が周期的に変化する第2送信電波を送信する第2の送信機と、
前記RFIDタグからの応答電波を受信する受信機と、
前記第1の送信電波と前記第2の送信電波の合成電波の包絡線と、前記応答電波の包絡線との間の位相差に基づいて前記第1又は第2のアンテナと前記RFIDタグとの間の距離を算出する制御演算装置とを備える、RFIDタグの距離検出装置。
【請求項4】
前記RFIDタグの位置で前記第1送信電波と前記第2送信電波とが干渉した状態で、前記第1送信電波及び第2送信電波の一方の送信を制御して、前記RFIDタグから受信した応答電波に現れる変化を検出し、前記送信を制御した時刻から前記変化が検出される時刻までの経過時間に基づいて、前記第1又は第2のアンテナと前記RFIDタグとの間の距離を算出する制御演算装置とを更に備える、請求項1に記載のRFIDタグの方位検出装置。
【請求項5】
前記第2の送信機は、第2のアンテナを経由して前記RFIDタグに、前記所定の周波数を有し、前記第1送信電波と同期し、且つ、振幅が周期的に変化する第3送信電波を送信し、
前記第1及び第2の送信機がそれぞれ前記第1及び第3送信電波を送信した状態で、前記第1送信電波と前記第3送信電波の合成電波の包絡線と、前記応答電波の包絡線との間の位相差に基づいて、前記第1又は第2のアンテナと前記RFIDタグとの間の距離を算出する、請求項1に記載のRFIDタグの方位検出装置。
【請求項6】
第1のアンテナを経由してRFIDタグに所定の周波数を有する第1送信電波を送信し、
前記第1のアンテナと所定の距離を隔てて配置される第2のアンテナを経由して前記RFIDタグに、前記所定の周波数を有し且つ第1送信電波との間で可変の位相差を有する第2送信電波を送信し、
前記RFIDタグからの応答電波を受信し、
前記位相差と、前記応答電波に含まれる第1送信電波と第2送信電波との干渉との関係に基づいて、前記RFIDタグの方位を検出する、ことを特徴とするRFIDタグの方位検出方法。
【請求項7】
第1のアンテナを経由してRFIDタグに所定の周波数を有する第1送信電波を送信すると共に、前記第1のアンテナと所定の距離を隔てて配置される第2のアンテナを経由して前記RFIDタグに、前記所定の周波数を有し且つ第1送信電波との間で可変の位相差を有する第2送信電波を送信し、
前記RFIDタグの位置で前記第1送信電波と前記第2送信電波とが干渉した状態で前記RFIDタグからの応答電波を受信し、
前記第1送信電波及び第2送信電波の一方の送信を制御して、前記RFIDタグから受信した応答電波に現れる変化を検出し、
前記送信を制御した時刻から前記変化が検出される時刻までの経過時間に基づいて、前記第1又は第2のアンテナと前記RFIDタグとの間の距離を算出する、ことを特徴とするRFIDタグの距離検出方法。
【請求項8】
第1のアンテナを経由してRFIDタグに所定の周波数を有する第1送信電波を送信すると共に、前記第1のアンテナと所定の距離を隔てて配置される第2のアンテナを経由して前記RFIDタグに、前記所定の周波数を有し、前記第1送信電波と同期し、且つ、振幅が周期的に変化する第2送信電波を送信し、
前記RFIDタグからの応答電波を受信し、前記第1の送信電波と第2の送信電波の合成電波の包絡線と、前記応答電波の包絡線との間の位相差に基づいて、前記第1又は第2のアンテナと前記RFIDタグとの間の距離を算出する、ことを特徴とするRFIDタグの距離検出方法。
【請求項1】
第1のアンテナを経由してRFIDタグに所定の周波数を有する第1送信電波を送信する第1の送信機と、
前記第1のアンテナと所定の距離を隔てて配置される第2のアンテナを経由して前記RFIDタグに、前記所定の周波数を有し且つ第1送信電波との間で可変の位相差を有する第2送信電波を送信する第2の送信機と、
前記RFIDタグからの応答電波を受信する受信機と、
前記位相差と、前記応答電波に含まれる第1送信電波と第2送信電波との干渉との関係に基づいて、前記RFIDタグの方位を検出する方位検出部とを備える、RFIDタグの方位検出装置。
【請求項2】
第1のアンテナを経由してRFIDタグに所定の周波数を有する第1送信電波を送信する第1の送信機と、
前記第1のアンテナと所定の距離を隔てて配置される第2のアンテナを経由して前記RFIDタグに、前記所定の周波数を有し且つ第1送信電波との間で可変の位相差を有する第2送信電波を送信する第2の送信機と、
前記RFIDタグからの応答電波を受信する受信機と、
前記RFIDタグの位置で前記第1送信電波と前記第2送信電波とが干渉した状態で、前記第1送信電波及び第2送信電波の一方の送信を制御して、前記RFIDタグから受信した応答電波に現れる変化を検出し、前記送信を制御した時刻から前記変化が検出される時刻までの経過時間に基づいて、前記第1又は第2のアンテナと前記RFIDタグとの間の距離を算出する制御演算装置とを備える、RFIDタグの距離検出装置。
【請求項3】
第1のアンテナを経由してRFIDタグに所定の周波数を有する第1送信電波を送信する第1の送信機と、
前記第1のアンテナと所定の距離を隔てて配置される第2のアンテナを経由して前記RFIDタグに、前記所定の周波数を有し、前記第1送信電波と同期し、且つ、振幅が周期的に変化する第2送信電波を送信する第2の送信機と、
前記RFIDタグからの応答電波を受信する受信機と、
前記第1の送信電波と前記第2の送信電波の合成電波の包絡線と、前記応答電波の包絡線との間の位相差に基づいて前記第1又は第2のアンテナと前記RFIDタグとの間の距離を算出する制御演算装置とを備える、RFIDタグの距離検出装置。
【請求項4】
前記RFIDタグの位置で前記第1送信電波と前記第2送信電波とが干渉した状態で、前記第1送信電波及び第2送信電波の一方の送信を制御して、前記RFIDタグから受信した応答電波に現れる変化を検出し、前記送信を制御した時刻から前記変化が検出される時刻までの経過時間に基づいて、前記第1又は第2のアンテナと前記RFIDタグとの間の距離を算出する制御演算装置とを更に備える、請求項1に記載のRFIDタグの方位検出装置。
【請求項5】
前記第2の送信機は、第2のアンテナを経由して前記RFIDタグに、前記所定の周波数を有し、前記第1送信電波と同期し、且つ、振幅が周期的に変化する第3送信電波を送信し、
前記第1及び第2の送信機がそれぞれ前記第1及び第3送信電波を送信した状態で、前記第1送信電波と前記第3送信電波の合成電波の包絡線と、前記応答電波の包絡線との間の位相差に基づいて、前記第1又は第2のアンテナと前記RFIDタグとの間の距離を算出する、請求項1に記載のRFIDタグの方位検出装置。
【請求項6】
第1のアンテナを経由してRFIDタグに所定の周波数を有する第1送信電波を送信し、
前記第1のアンテナと所定の距離を隔てて配置される第2のアンテナを経由して前記RFIDタグに、前記所定の周波数を有し且つ第1送信電波との間で可変の位相差を有する第2送信電波を送信し、
前記RFIDタグからの応答電波を受信し、
前記位相差と、前記応答電波に含まれる第1送信電波と第2送信電波との干渉との関係に基づいて、前記RFIDタグの方位を検出する、ことを特徴とするRFIDタグの方位検出方法。
【請求項7】
第1のアンテナを経由してRFIDタグに所定の周波数を有する第1送信電波を送信すると共に、前記第1のアンテナと所定の距離を隔てて配置される第2のアンテナを経由して前記RFIDタグに、前記所定の周波数を有し且つ第1送信電波との間で可変の位相差を有する第2送信電波を送信し、
前記RFIDタグの位置で前記第1送信電波と前記第2送信電波とが干渉した状態で前記RFIDタグからの応答電波を受信し、
前記第1送信電波及び第2送信電波の一方の送信を制御して、前記RFIDタグから受信した応答電波に現れる変化を検出し、
前記送信を制御した時刻から前記変化が検出される時刻までの経過時間に基づいて、前記第1又は第2のアンテナと前記RFIDタグとの間の距離を算出する、ことを特徴とするRFIDタグの距離検出方法。
【請求項8】
第1のアンテナを経由してRFIDタグに所定の周波数を有する第1送信電波を送信すると共に、前記第1のアンテナと所定の距離を隔てて配置される第2のアンテナを経由して前記RFIDタグに、前記所定の周波数を有し、前記第1送信電波と同期し、且つ、振幅が周期的に変化する第2送信電波を送信し、
前記RFIDタグからの応答電波を受信し、前記第1の送信電波と第2の送信電波の合成電波の包絡線と、前記応答電波の包絡線との間の位相差に基づいて、前記第1又は第2のアンテナと前記RFIDタグとの間の距離を算出する、ことを特徴とするRFIDタグの距離検出方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2011−59037(P2011−59037A)
【公開日】平成23年3月24日(2011.3.24)
【国際特許分類】
【出願番号】特願2009−211359(P2009−211359)
【出願日】平成21年9月14日(2009.9.14)
【出願人】(000176763)三菱化学エンジニアリング株式会社 (85)
【Fターム(参考)】
【公開日】平成23年3月24日(2011.3.24)
【国際特許分類】
【出願日】平成21年9月14日(2009.9.14)
【出願人】(000176763)三菱化学エンジニアリング株式会社 (85)
【Fターム(参考)】
[ Back to top ]