
タッチパネル式入力装置及びタッチパネル式入力装置の画面表示方法

【課題】誤った入力に基づいて、コントローラに操作情報が出力されることを防止できるタッチパネル式入力装置を提供する。
【解決手段】ティーチングペンダントが備える表示部11の表示領域に選択ボタン表示領域34と確認メッセージ表示領域33とを分割配置し、確認メッセージ表示領域33を画面の上辺に沿うように寄せて配置し、選択ボタン表示領域34を画面の右辺に沿うように寄せて配置する。選択段階では、複数の選択ボタン21を選択ボタン表示領域34に表示させ、確定段階では、選択された候補を操作者に確認させるメッセージ23を確認メッセージ表示領域33に表示させると共に、確定入力を行うための確定ボタン26を選択ボタン表示領域34外の余白スペース35に配置する。また、確定ボタン26を、操作者の右手の指が選択ボタン21の何れかにタッチする位置に到達した状態で、操作者の右手によって隠れる位置に配置する。
【解決手段】ティーチングペンダントが備える表示部11の表示領域に選択ボタン表示領域34と確認メッセージ表示領域33とを分割配置し、確認メッセージ表示領域33を画面の上辺に沿うように寄せて配置し、選択ボタン表示領域34を画面の右辺に沿うように寄せて配置する。選択段階では、複数の選択ボタン21を選択ボタン表示領域34に表示させ、確定段階では、選択された候補を操作者に確認させるメッセージ23を確認メッセージ表示領域33に表示させると共に、確定入力を行うための確定ボタン26を選択ボタン表示領域34外の余白スペース35に配置する。また、確定ボタン26を、操作者の右手の指が選択ボタン21の何れかにタッチする位置に到達した状態で、操作者の右手によって隠れる位置に配置する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、操作者により入力された情報をコントローラに出力するタッチパネル式のタッチパネル式入力装置,及び当該装置の画面表示方法に関する。
【背景技術】
【0002】
ティーチングペンダントは、ロボットコントローラにプログラムを起動させる場合、複数のプログラムから何れかを操作者に選択させる選択入力と、その選択結果を確定させる確定入力とを行うことで起動対象を決定し、その決定に応じた情報をコントローラに出力する。そして、ティーチングペンダントでは、操作者が入力を誤ることで、ロボットが操作者の意図しない動作をすることを防止するフェイルセーフ対策が重要となっている。すなわち、ロボットが操作者の意図しない動きをすると、事故に繋がる可能性が高まるからである。
【0003】
例えば特許文献1には、ティーチングペンダントを用いてロボットに教示(ティーチング)を行う場合に操作キーが2段階で変位するように構成し、1段階目の操作によってロボット側に配置されマニピュレータの回転方向を示す表示器が点灯し、示された回転方向が意図したものであればそのまま2段階目の操作を行い、マニピュレータを回転させるようにした技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−878号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、ティーチングペンダントが、画面に入力用ボタンのシンボルを表示させ、操作者が指先などでそのシンボルにタッチすることで入力を行うタッチパネル式で構成されている場合には、操作面(タッチパネル)に、操作ボタンが操作子を有している場合のような段差が存在しない。そのため、入力のプロセスが複数段階となっていても、各段階でタッチを行う際に指先がぶれるなどすれば、操作者の意思に反した入力が誤って行われる可能性が高くなる。
【0006】
本発明は上記事情に鑑みてなされたものであり、その目的は、誤った入力に基づいて、コントローラに操作情報が出力されることを防止できるタッチパネル式入力装置,及び当該装置の画面表示方法を提供することにある。
【課題を解決するための手段】
【0007】
請求項1記載のタッチパネル式入力装置によれば、矩形をなす画面の表示領域を、少なくとも、それぞれ概ね矩形をなす選択ボタン表示領域と確認メッセージ表示領域とに分割し、確認メッセージ表示領域は、その長辺部が操作者から見て表示画面の上辺に沿うように配置し、選択ボタン表示領域は、その長辺部が上辺を除く3辺の何れかに沿うように配置する。そして、選択段階では、複数の選択候補に対応する複数の選択ボタンを選択ボタン表示領域に表示させ、確定段階では、選択段階で選択された候補を操作者に確認させるためのメッセージを確認メッセージ表示領域に表示させると共に、確定入力を行うための確定ボタンを、選択ボタン表示領域外に配置する。
【0008】
斯様に構成すれば、選択段階において、操作者の指が選択ボタンの何れかにタッチすれば、対応する候補の選択を確認するためのメッセージは画面の上辺側に表示されるので、操作者は、自身の指先の方を見ていれば自ずと、その指により隠されることがないメッセージを明確に視認することができる。そして、前記メッセージの内容により、選択を誤ったか否か、若しくはタッチ入力が誤って行われた否かを、選択候補を確定させる以前に確認できるので、誤入力による不用意な指令の出力を回避できる。
【0009】
加えて、確定ボタンを、操作者の指が選択ボタンの何れかにタッチする位置に到達した状態で、操作者の手によって隠れる位置に配置する。斯様に構成すれば、操作者がタッチ入力を行うことで選択段階から確定段階に移行した直後は、表示された確定ボタンが自身の手に遮られて視認できない場合があり、すると操作者は、一旦手を画面の外に移動させて確定ボタンの表示位置を確認することになる。したがってその過程で、表示されている確認メッセージを視認するための時間的猶予が発生するので、選択候補の確認が一層確実に行われるようになる。
【0010】
請求項2記載のタッチパネル式入力装置によれば、選択ボタン表示領域を、操作者から見て画面の左辺,右辺の何れか一方側に寄せて配置し、確定ボタンを、選択ボタン表示領域の下端に隣接して配置する。したがって、操作者が、確定ボタンの上方に位置する選択ボタンにタッチしようとすれば、確定ボタンを操作者が視認できない状態にすることができる。
【0011】
請求項3記載のタッチパネル式入力装置によれば、選択ボタン表示領域を、操作者から見て画面の下辺側に配置し、確定ボタンを、画面の下辺側で且つ選択ボタン表示領域に隣接して配置する。したがって、操作者が、選択ボタンにタッチしようとすれば、確定ボタンを操作者が視認できない状態にできる。尚、この場合も操作者の利き手を考慮して、例えば右利きを優先するのであれば、確定ボタンを操作者から見て画面の右辺側に配置するのが望ましい。
【0012】
請求項4記載のタッチパネル式入力装置によれば、選択段階から確定段階に移行する際に複数の選択ボタンの画像を消去するので、余分な画像を排除して画面をより見易くできる。
【図面の簡単な説明】
【0013】
【図1】第1実施例であり、ティーチングペンダントの表示部より操作者がタッチ入力を行う場合の画面表示例を示す図
【図2】より具体的な例を示す図1相当図
【図3】ロボットシステムの構成を示す図
【図4】第2実施例を示す図1相当図
【図5】第3実施例を示す図1相当図
【図6】本発明に係る第4実施例を示す図1相当図
【図7】本発明に係る第5実施例を示す図1相当図
【発明を実施するための形態】
【0014】
(第1実施例)
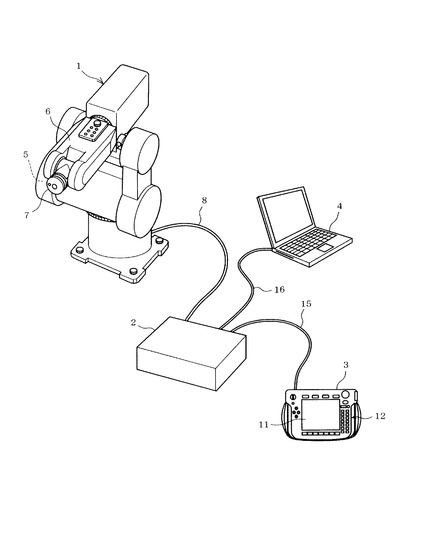
以下、第1実施例について図1乃至図3を参照して説明する。図3は、ロボットシステムの構成を示す図である。ロボットシステムは、ロボット1および制御装置(コントローラ)2を備えている。ロボット1は、例えば部品の組み立て用あるいは部品の検査用など、任意の構成のロボットである。制御装置2は、周辺機器としてティーチングティーチングペンダント(タッチパネル式入力装置)3およびプログラム入力用のパソコン4などが接続されている。
【0015】
ロボット1は、例えば6軸の垂直多関節型のロボットとして構成されている。ロボット1は、周知の通り、それぞれアクチュエータであるサーボモータ5などからの駆動力で駆動されるアーム6を有している。アーム6は、先端にエンドエフェクタ7を有している。例えばロボット1で部品の運搬や組み立てなどを行う場合、エンドエフェクタ7としてこれらの部品を保持するためのハンドが用いられる。また、例えばロボット1で部品の検査などを行う場合、エンドエフェクタ7として対象となる部品を撮影するカメラなどが用いられる。
【0016】
このように、エンドエフェクタ7は、ロボット1を適用する工程に応じて任意に選択することができる。サーボモータ5からアーム6のエンドエフェクタ7までの間には、図示しない減速機構やリンクなどの駆動力伝達機構が設けられている。これにより、アーム6の先端に設けられているエンドエフェクタ7は、サーボモータ5からの駆動力によって駆動される。ロボット1と制御装置2との間は、接続ケーブル8によって接続されている。これにより、ロボット1の各軸を駆動するサーボモータ5、および作業を実施するエンドエフェクタ7は、制御装置2によって制御される。
【0017】
ティーチングペンダント3は、例えばユーザが携帯あるいは手に所持して操作可能な程度の大きさで、例えば薄型の略矩形箱状に形成されている。ティーチングペンダント3は、表面部の中央部に例えば液晶ディスプレイからなる表示部(表示手段)11を有している。表示部11には、各種の画面が表示される。表示部11は、タッチパネルで構成されている。またティーチングペンダント3には、表示部11の周囲に各種のキースイッチ12が設けられており、ユーザは、キースイッチ12やタッチパネルによって種々の入力操作を行う。
【0018】
ティーチングペンダント3は、ケーブル15を経由して制御装置2に接続され、通信インターフェイスを経由して制御装置2との間で高速のデータ転送を実行するようになっており、キースイッチ12等やタッチ操作により入力された操作信号等の情報はティーチングペンダント3から制御装置2へ送信される。また、制御装置2は、ティーチングペンダント3へ制御信号や表示用の信号などと共に駆動用の電力を供給する。
【0019】
ユーザは、上記のティーチングペンダント3を用いてロボット1の運転や設定などの各種の機能を実行可能であり、例えばキースイッチ12等を操作することで、予め記憶されている制御プログラムを呼び出して、ロボット1の起動や各種のパラメータの設定などを実行できる。また、ロボット1をマニュアル操作で動作させて各種の教示作業も実行可能であり、表示部11には、例えばメニュー画面、設定入力画面、状況表示画面など必要に応じて所望の画面が表示される。
【0020】
パソコン4は例えば汎用のノートパソコンなどであり、ユーザは、プログラミングソフトを実行させることでアプリケーションに応じてロボット1の動作手順などを記述した動作プログラムを作成できる。このパソコン4は、ケーブル16を経由して制御装置2に接続されており、作成されたロボット1の動作プログラムは、パソコン4から制御装置2へ転送される。
【0021】
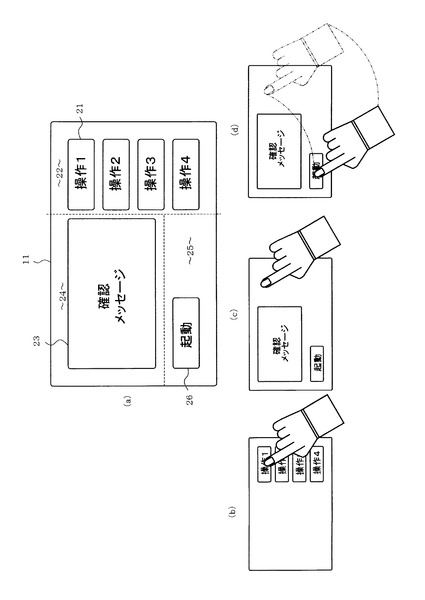
次に、本実施例の作用について図1及び図2も参照して説明する。図1は、ティーチングペンダント3の表示部11より、操作者がタッチ入力を行う場合の画面表示例を示している。基本的な操作のプロセスは、複数の選択候補に対応する入力ボタン(選択ボタン)のシンボルが画面に表示され、操作者がそれらの何れか1つにタッチすることで選択を行う選択段階と、選択した候補を確定させる入力ボタン(確定ボタン)のシンボルが画面に表示され、操作者が確定ボタンにタッチすることで確定させる確定段階とからなっている。また、確定段階では、上記確定ボタンと共に、選択した候補を操作者に確認させるためのメッセージも表示されるようになっている。
【0022】
この場合、表示部11の画面は、図1(a)に示すように、概ね、複数の選択ボタン21(「操作1」〜「操作4」)の一群が表示される選択ボタン表示領域22と、上記の確認メッセージ23を表示させる確認メッセージ表示領域24とに分割される。図1(a)では、画面内に表示されるシンボルやメッセージを全て同時に示している。そして、4つの選択ボタン21(シンボルは横長矩形状である)が画面の右辺に沿って縦一列に並ぶことで、選択ボタン表示領域22が画面右側に縦長の矩形をなすように配置されている。尚、この場合、操作者は「右利き」であることを想定している。
【0023】
確認メッセージ表示領域24は横長の矩形をなしており、その上辺が画面の上辺に沿うように寄せて配置されている。また、画面には、選択ボタン表示領域22,確認メッセージ表示領域24を除く、画面の左下から下辺に沿った部分は横長の矩形となる余白スペース25となっており、当該スペース25の内部となる画面の左下隅部に確定ボタン26(「起動」,シンボルは横長矩形状)が表示されている。
【0024】
図1(b)〜(d)は、操作者が表示部11にタッチ入力を行うことで、選択段階から確定段階に至る画面表示の変化を示している。図1(b)に示す選択段階の画面では、選択ボタン表示領域22に4つの選択ボタン21だけが表示される。そして、操作者は、右手の例えば人差し指により選択ボタン21の1つ,例えば「操作1」にタッチして「操作1」を選択する。
【0025】
すると、画面は図1(c)に示す状態,確定段階に移行し、選択ボタン表示領域22における選択ボタン21の表示は消去され、確認メッセージ表示領域24には、操作者が「操作1」を選択したことの確認を促すためのメッセージが表示される。それと同時に、確定ボタン26も表示される。そして、操作者が、表示されたメッセージを視認して「操作1」の選択に間違いがなければ、図1(d)に示すように、右手を画面左下の確定ボタン26に移動させて人差し指でタッチする。これで、一連の入力動作が完了する。
【0026】
尚、図1(d)には、操作者の右手が「操作1」の選択ボタン21の位置から確定ボタン26の位置に移動する場合の、右手の移動範囲を2点鎖線で図示しているが、その移動範囲は、確認メッセージ表示領域24とほとんど重複しないようになっている。また、図1(c)には図示しないが、選択段階における操作者の選択が間違っていたり、指先のぶれ等による誤入力であった場合には、その選択を取り消してやり直させることは勿論である。そのため、図1(c)において余白スペース25内に、例えば確定ボタン26の右隣に「取消し」,「キャンセル」ボタンのシンボルや、「戻る」ボタンのシンボルを表示させ、操作者がそのボタンにタッチした場合には図1(b)の画面に戻して、再度選択段階からやり直させるようにする。
【0027】
図2は、図1をより具体的なケースに適用した場合の表示例を示す。この例では、4つの選択ボタン21:「PRO1」〜「PRO4」によって、ロボット1の動作プログラムの1つを選択するようになっている。また、上述したように、選択を誤った場合にやり直すための「キャンセル」ボタン27も表示している。
図2(b)に示す選択段階の画面において、操作者が選択ボタン21の1つ「PRO1」にタッチして選択すると、画面は図2(c)に示す状態に移行し、確認メッセージ表示領域24に、操作者が「PRO1」を選択したことの確認を促すためのメッセージ「“PRO1”を起動します。ロボットが動作しますので動作範囲の外で“起動”を押してください。」が表示される。それと同時に、確定ボタン26,キャンセルボタン27も表示される。
【0028】
そして、操作者が、表示されたメッセージを視認して「PRO1」の選択に間違いがなければ、図2(d)に示すように確定ボタン26にタッチする。また、図2(c)に示す状態において、「PRO1」の選択が間違いであった場合は、キャンセルボタン27にタッチすることで図2(b)の画面に戻るようにする。
【0029】
以上のように本実施例によれば、ティーチングペンダント3が備える表示部11の表示領域に、少なくとも選択ボタン表示領域22と確認メッセージ表示領域24とを分割配置し、確認メッセージ表示領域24を、その長辺部が操作者から見て表示画面の上辺に沿うように寄せて配置し、選択ボタン表示領域22を、その長辺部が画面の右辺に沿うように寄せて配置した。そして、選択段階では、複数の選択ボタン21を選択ボタン表示領域22に表示させ、確定段階では、選択段階で選択された候補を操作者に確認させる確認メッセージ23を確認メッセージ表示領域24に表示させると共に、確定入力を行うための確定ボタン26を、選択ボタン表示領域22外の余白スペース25に配置した。
【0030】
すなわち、確認メッセージ表示領域24は、画面の上辺と、選択ボタン表示領域22が位置する側の右辺に対向する左辺側とに沿って広がるスペースに配置されるので、選択段階において操作者の右手の指が選択ボタン21の何れかにタッチすれば、対応する候補の選択を確認させるメッセージ23は画面の上辺側に表示されるので、操作者は、自身の指先の方を見ていれば自ずと、その指により隠されることがない確認メッセージ23を明確に視認できる。そして操作者は、前記メッセージ23の内容により、選択を誤ったか否か、若しくはタッチ入力が誤って行われた否かを、選択候補を確定させる以前に確認できるので、誤入力による不用意な指令の出力を回避できる。また、指先の移動ラインの上方に確認メッセージ23が表示されるので、自己の指先を移動させるために目線が行っている操作者の注意を、確認メッセージ23に誘導し易くなる。
【0031】
また、確認メッセージ23は、操作者の指が選択ボタン21にタッチした後確定ボタン26の位置に移動するまでの間に操作者の右手によって遮られないので、確定ボタン26にタッチ入力が行われる直前まで確認メッセージ23を操作者に視認させることができる。更に、選択段階から確定段階に移行する際に複数の選択ボタン21の画像を消去するので、余分な画像を排除して画面をより見易くできる。
【0032】
(第2実施例)
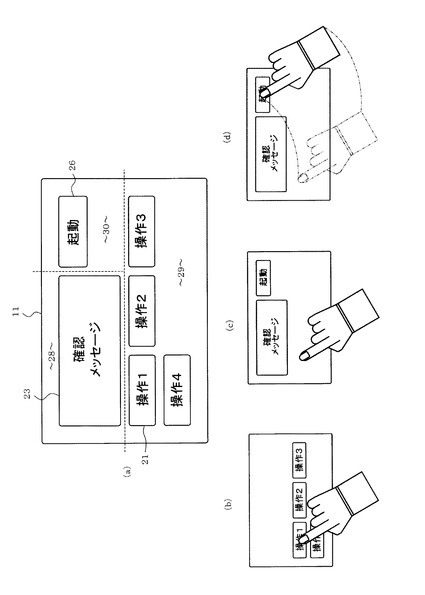
図4は第2実施例であり、第1実施例と同一部分には同一符号を付して説明を省略し、以下異なる部分について説明する。第2実施例は、表示部11における画面の表示形態が第1実施例とは異なっている。図4は図1相当図であり、確認メッセージ表示領域28は、第1実施例の領域24と同様に、画面左上隅より横長矩形状に広がっているが、その表示面積は、縦方向にやや圧縮されている。
【0033】
そして、画面のおよそ下半分を占める部分が選択ボタン表示領域29となっており、その領域内には、4つの選択ボタン21が2列に亘って配置されている。第1列には「操作1」〜「操作3」のシンボルが横並びで表示され、第2列の「操作1」の行に対応する位置(画面の左下隅)には「操作4」のシンボルが表示されている。この場合、第2列の「操作2」,「操作3」の行に対応する位置にはシンボルが表示されずブランクとなるが、当該部分にその他のシンボルを表示することもないので、そのブランク部分も含めて選択ボタン表示領域29とする。
すると、画面の右上側が余白スペース30となるが、そのスペース30の上端(画面の右上隅)に確定ボタン26が配置されている。
【0034】
次に、第2実施例の作用について図4(b)〜(d)も参照して説明する。図4(b)に示す選択段階の画面では、選択ボタン表示領域29に複数の選択ボタン21だけが表示され、操作者は、右手の人差し指により選択ボタン21の1つ,例えば「操作1」にタッチして「操作1」を選択する。すると、画面は図4(c)に示す状態に移行し、選択ボタン表示領域29における選択ボタン21の表示は消去され、確認メッセージ表示領域28に、操作者が「操作1」を選択したことの確認を促すためのメッセージが表示される。それと同時に、確定ボタン26も画面の右上隅に表示される。そして、操作者が、表示されたメッセージを視認して「操作1」の選択に間違いがなければ、図4(d)に示すように、右手を画面右上の確定ボタン26に移動させて人差し指でタッチする。
尚、図4(d)にも、操作者の右手が「操作1」の選択ボタン21の位置から確定ボタン26の位置に移動する場合の、右手の移動範囲を2点鎖線で図示しているが、その移動範囲は、やはり確認メッセージ表示領域28とほとんど重複しないようになっている。
【0035】
以上のように第2実施例によれば、選択ボタン表示領域29を、操作者から見て画面の下辺側に配置し、確定ボタン26を、画面の上辺側で且つ確認メッセージ表示領域28の右側に隣接させて配置した。したがって、操作者の指が画面の下辺側に表示される選択ボタン21の何れかにタッチした場合でも、画面の上辺側に表示される確認メッセージ23を容易に視認できる。そしてこの場合も、操作者の右手の指が選択ボタン21にタッチした後確定ボタン26にタッチする直前まで、確認メッセージ23を操作者に視認させることができる。
【0036】
(第3実施例)
図5は第3実施例であり、第2実施例と同様に、表示部11における画面表示形態のバリエーションを示す。確認メッセージ表示領域31は、画面のおよそ上半分を占める横長矩形状となっており、画面下側の右辺寄りの部分が選択ボタン表示領域32となっている。その領域内には、4つの選択ボタン21が2行2列で配置されている。第1列には「操作1」,「操作2」のシンボルが横並びで表示され、第2列には「操作3」,「操作4」のシンボルが表示されている。すると、画面の左下側が余白スペース33となるが、そのスペースの下端(画面の左下隅)に確定ボタン26が配置されている。
【0037】
次に、第3実施例の作用について図5(b)〜(d)も参照して説明する。図5(b)に示す選択段階の画面では、選択ボタン表示領域32に複数の選択ボタン21だけが表示され、操作者は、右手の人差し指により選択ボタン21の1つ,例えば「操作2」にタッチして選択する。
すると、画面は図5(c)に示す状態に移行し、選択ボタン表示領域32における選択ボタン21の表示は消去され、確認メッセージ表示領域31に、操作者が「操作2」を選択したことの確認を促すためのメッセージが表示される。それと同時に、確定ボタン26も画面の左下隅に表示される。そして、操作者が、表示されたメッセージを視認して「操作2」の選択に間違いがなければ、図5(d)に示すように、右手を画面左下の確定ボタン26に移動させて人差し指でタッチする。
尚、図5(d)にも、操作者の右手が「操作2」の選択ボタン21の位置から確定ボタン26の位置に移動する場合の右手の移動範囲を2点鎖線で図示しているが、その移動範囲は、やはり確認メッセージ表示領域31とほとんど重複しないようになっている。
【0038】
以上のように第3実施例によれば、選択ボタン表示領域32を画面の下辺右側に配置し、確定ボタン26を、画面の下辺側で且つ選択ボタン表示領域32の左側に隣接させて配置した。この場合も、第2実施例と同様に、操作者の指が選択ボタン21の何れかにタッチした状態で、操作者は確認メッセージ23を容易に視認できる。そして、操作者の右手の指が選択ボタン21にタッチした後確定ボタン26にタッチする直前まで、確認メッセージ表示領域31に表示される確認メッセージ23を操作者に視認させることができる。
【0039】
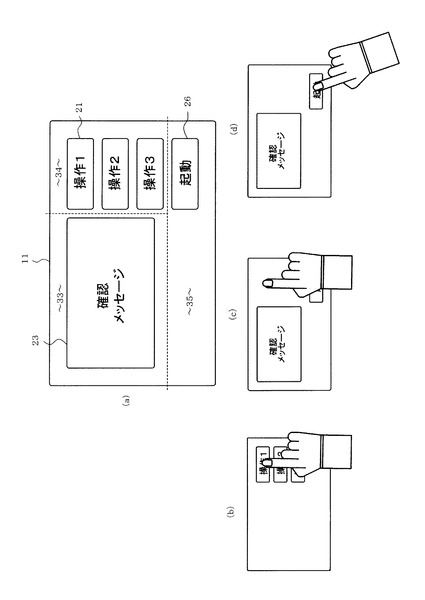
(第4実施例)
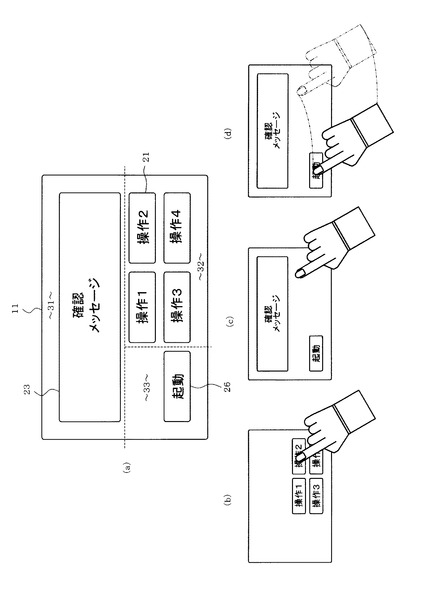
図6は本発明に係る第4実施例であり、やはり表示部11における画面表示形態のバリエーションを示す。確認メッセージ表示領域33は、第1実施例と同様に設定されている。そして、選択ボタン表示領域34も、第1実施例と同様に画面の右辺に沿って配置されているが、選択ボタン21は「操作1」〜「操作3」の3つだけ表示されており、「操作4」に対応する位置に確定ボタン26が表示されている。すなわち、確認メッセージ表示領域33と、選択ボタン表示領域34とを除く画面の下方側が余白スペース35となっており、その余白スペース35の右端(画面の右下隅)に確定ボタン26が表示されている。
尚、この表示レイアウトは相対的なものであるから、画面の縦方向サイズに余裕があれば選択ボタン21を「操作4」まで表示させ、「操作4」の下に確定ボタン26を表示しても良いし、画面のサイズに余裕がない場合でも、各選択ボタン21や確定ボタン26の表示サイズを若干小さくすることで上記と同様に表示しても良い。
【0040】
次に、第4実施例の作用について図6(b)〜(d)も参照して説明する。図6(b)に示す選択段階の画面では、選択ボタン表示領域34に複数の選択ボタン21だけが表示され、操作者は、右手の人差し指により選択ボタン21の1つ,例えば「操作1」にタッチして選択する。
すると、画面は図6(c)に示す状態に移行し、選択ボタン表示領域34における選択ボタン21の表示は消去され、確認メッセージ表示領域33に、操作者が「操作1」を選択したことの確認を促すためのメッセージ23が表示される。それと同時に、確定ボタン26も画面の右下隅に表示されるが、この場合、確定ボタン26は、操作者の右手に遮られるため、操作者が直接視認できない,若しくは視認し難い状態になる。
【0041】
したがって、操作者は、右手を一旦画面からどけて表示を確認してから、確定ボタン26にタッチしようとする。その間に、確認メッセージ23の内容を認識するための時間が生じるので、操作者は、「操作1」の選択が適切であったかどうかを十分に確認することができる。
【0042】
以上のように第4実施例によれば、確定ボタン26を、操作者の右手の指が選択ボタン21の何れかにタッチする位置に到達した状態で、操作者の右手によって隠れる位置に配置した。具体的には、選択ボタン表示領域34を、操作者から見て画面の右辺側に寄せて配置し、確定ボタン26を選択ボタン表示領域34の下端に隣接して配置した。
すなわち、操作者が、確定ボタン26の上方に位置する選択ボタン21に右手の指でタッチしようとすれば確定ボタン26を操作者が視認し難い状態にでき、操作者は、一旦右手を画面の外に移動させて確定ボタン26の表示位置を確認するので、その過程で表示されている確認メッセージ23を視認するための時間的猶予が発生し、選択候補の確認が一層確実に行われるようになる。また、操作者が確定ボタン26を探すまでの時間も発生するので、自身が選択した選択ボタン21につき選択の適否を再考する時間が与えられ、選択候補を確認する確実性を高めることができる。
【0043】
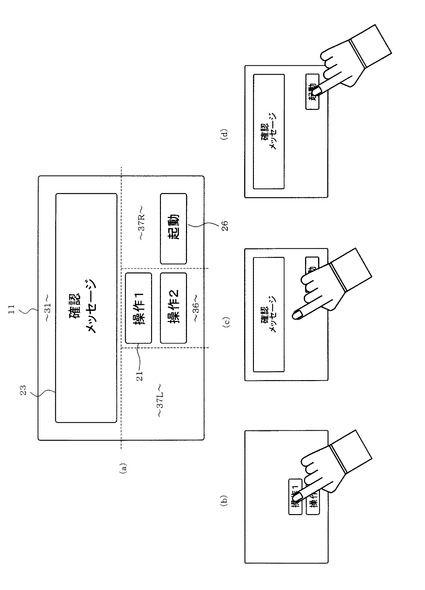
(第5実施例)
図7は本発明に係る第5実施例であり、やはり表示部11における画面表示形態のバリエーションを示す。確認メッセージ表示領域31は、第3実施例と同様に設定されており、選択ボタン表示領域36は、画面下方側の中央部に配置され、選択ボタン21は「操作1」,「操作2」の3つだけ表示されている。したがって、選択ボタン表示領域36の左右両側が余白スペース37(L,R)となるが、余白スペース37R側(画面の右下隅)に確定ボタン26が表示されている。
【0044】
次に、第5実施例の作用について図7(b)〜(d)も参照して説明する。図7(b)に示す選択段階の画面では、選択ボタン表示領域36に2つの選択ボタン21だけが表示され、操作者は、右手の人差し指により選択ボタン21の1つ,例えば「操作1」にタッチして選択する。
すると、画面は図7(c)に示す状態に移行し、選択ボタン表示領域36における選択ボタン21の表示は消去され、確認メッセージ表示領域31に、操作者が「操作1」を選択したことの確認を促すためのメッセージが表示される。それと同時に、確定ボタン26も画面の右下隅に表示されるが、この場合も第4実施例と同様に、確定ボタン26は、操作者の右手に遮られるため、操作者が直接視認し難い状態になる。
【0045】
したがって、操作者は、右手を一旦画面からどけて表示を確認してから、確定ボタン26にタッチしようとする。その間に、確認メッセージ23の内容を認識するための時間が生じるので、操作者は、「操作1」の選択が適切であったかどうかを十分に確認することができる。
【0046】
以上のように第5実施例によれば、選択ボタン表示領域36を画面下辺側の中央に配置し、確定ボタン26を、画面の下辺側で且つ選択ボタン表示領域36の右側に隣接して配置したので、操作者が、選択ボタン21に右手の指でタッチしようとした場合に、確定ボタン26を操作者が視認し難い状態にできる。
【0047】
本発明は上記し又は図面に記載した実施例にのみ限定されるものではなく、以下のような変形又は拡張が可能である。
操作者の利き手が左手である場合には、各実施例毎に画面左右の配置を以下のように逆に設定すれば良い。
第1実施例:選択ボタン表示領域22を左側,起動ボタン26を右側に配置
第2実施例:確認メッセージ表示領域28を右側,起動ボタン26を左側に配置
第3実施例:選択ボタン表示領域32を左側,起動ボタン26を右側に配置
第4実施例:選択ボタン表示領域34及び起動ボタン26を左側に配置
第5実施例:起動ボタン26を左側に配置
また、操作者に自身の利き手の左右を入力させ、その入力結果に応じて画面の配置を変更しても良い。
選択ボタンの配置数は、適宜変更すれば良い。
選択する対象はロボットの動作プログラムに限ることなく、例えばティーチングを行う場合の手先の移動方向などでも良い。
【符号の説明】
【0048】
図面中、1はロボット、2は制御装置(コントローラ)、3はティーチングティーチングペンダント(タッチパネル式入力装置)、11は表示部(表示手段)、21は選択ボタン、22は選択ボタン表示領域、23は確認メッセージ、24は確認メッセージ表示領域、26は確定ボタン、28は確認メッセージ表示領域、29は選択ボタン表示領域、31は確認メッセージ表示領域、32は選択ボタン表示領域、33は確認メッセージ表示領域、34,36は選択ボタン表示領域を示す。
【技術分野】
【0001】
本発明は、操作者により入力された情報をコントローラに出力するタッチパネル式のタッチパネル式入力装置,及び当該装置の画面表示方法に関する。
【背景技術】
【0002】
ティーチングペンダントは、ロボットコントローラにプログラムを起動させる場合、複数のプログラムから何れかを操作者に選択させる選択入力と、その選択結果を確定させる確定入力とを行うことで起動対象を決定し、その決定に応じた情報をコントローラに出力する。そして、ティーチングペンダントでは、操作者が入力を誤ることで、ロボットが操作者の意図しない動作をすることを防止するフェイルセーフ対策が重要となっている。すなわち、ロボットが操作者の意図しない動きをすると、事故に繋がる可能性が高まるからである。
【0003】
例えば特許文献1には、ティーチングペンダントを用いてロボットに教示(ティーチング)を行う場合に操作キーが2段階で変位するように構成し、1段階目の操作によってロボット側に配置されマニピュレータの回転方向を示す表示器が点灯し、示された回転方向が意図したものであればそのまま2段階目の操作を行い、マニピュレータを回転させるようにした技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−878号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、ティーチングペンダントが、画面に入力用ボタンのシンボルを表示させ、操作者が指先などでそのシンボルにタッチすることで入力を行うタッチパネル式で構成されている場合には、操作面(タッチパネル)に、操作ボタンが操作子を有している場合のような段差が存在しない。そのため、入力のプロセスが複数段階となっていても、各段階でタッチを行う際に指先がぶれるなどすれば、操作者の意思に反した入力が誤って行われる可能性が高くなる。
【0006】
本発明は上記事情に鑑みてなされたものであり、その目的は、誤った入力に基づいて、コントローラに操作情報が出力されることを防止できるタッチパネル式入力装置,及び当該装置の画面表示方法を提供することにある。
【課題を解決するための手段】
【0007】
請求項1記載のタッチパネル式入力装置によれば、矩形をなす画面の表示領域を、少なくとも、それぞれ概ね矩形をなす選択ボタン表示領域と確認メッセージ表示領域とに分割し、確認メッセージ表示領域は、その長辺部が操作者から見て表示画面の上辺に沿うように配置し、選択ボタン表示領域は、その長辺部が上辺を除く3辺の何れかに沿うように配置する。そして、選択段階では、複数の選択候補に対応する複数の選択ボタンを選択ボタン表示領域に表示させ、確定段階では、選択段階で選択された候補を操作者に確認させるためのメッセージを確認メッセージ表示領域に表示させると共に、確定入力を行うための確定ボタンを、選択ボタン表示領域外に配置する。
【0008】
斯様に構成すれば、選択段階において、操作者の指が選択ボタンの何れかにタッチすれば、対応する候補の選択を確認するためのメッセージは画面の上辺側に表示されるので、操作者は、自身の指先の方を見ていれば自ずと、その指により隠されることがないメッセージを明確に視認することができる。そして、前記メッセージの内容により、選択を誤ったか否か、若しくはタッチ入力が誤って行われた否かを、選択候補を確定させる以前に確認できるので、誤入力による不用意な指令の出力を回避できる。
【0009】
加えて、確定ボタンを、操作者の指が選択ボタンの何れかにタッチする位置に到達した状態で、操作者の手によって隠れる位置に配置する。斯様に構成すれば、操作者がタッチ入力を行うことで選択段階から確定段階に移行した直後は、表示された確定ボタンが自身の手に遮られて視認できない場合があり、すると操作者は、一旦手を画面の外に移動させて確定ボタンの表示位置を確認することになる。したがってその過程で、表示されている確認メッセージを視認するための時間的猶予が発生するので、選択候補の確認が一層確実に行われるようになる。
【0010】
請求項2記載のタッチパネル式入力装置によれば、選択ボタン表示領域を、操作者から見て画面の左辺,右辺の何れか一方側に寄せて配置し、確定ボタンを、選択ボタン表示領域の下端に隣接して配置する。したがって、操作者が、確定ボタンの上方に位置する選択ボタンにタッチしようとすれば、確定ボタンを操作者が視認できない状態にすることができる。
【0011】
請求項3記載のタッチパネル式入力装置によれば、選択ボタン表示領域を、操作者から見て画面の下辺側に配置し、確定ボタンを、画面の下辺側で且つ選択ボタン表示領域に隣接して配置する。したがって、操作者が、選択ボタンにタッチしようとすれば、確定ボタンを操作者が視認できない状態にできる。尚、この場合も操作者の利き手を考慮して、例えば右利きを優先するのであれば、確定ボタンを操作者から見て画面の右辺側に配置するのが望ましい。
【0012】
請求項4記載のタッチパネル式入力装置によれば、選択段階から確定段階に移行する際に複数の選択ボタンの画像を消去するので、余分な画像を排除して画面をより見易くできる。
【図面の簡単な説明】
【0013】
【図1】第1実施例であり、ティーチングペンダントの表示部より操作者がタッチ入力を行う場合の画面表示例を示す図
【図2】より具体的な例を示す図1相当図
【図3】ロボットシステムの構成を示す図
【図4】第2実施例を示す図1相当図
【図5】第3実施例を示す図1相当図
【図6】本発明に係る第4実施例を示す図1相当図
【図7】本発明に係る第5実施例を示す図1相当図
【発明を実施するための形態】
【0014】
(第1実施例)
以下、第1実施例について図1乃至図3を参照して説明する。図3は、ロボットシステムの構成を示す図である。ロボットシステムは、ロボット1および制御装置(コントローラ)2を備えている。ロボット1は、例えば部品の組み立て用あるいは部品の検査用など、任意の構成のロボットである。制御装置2は、周辺機器としてティーチングティーチングペンダント(タッチパネル式入力装置)3およびプログラム入力用のパソコン4などが接続されている。
【0015】
ロボット1は、例えば6軸の垂直多関節型のロボットとして構成されている。ロボット1は、周知の通り、それぞれアクチュエータであるサーボモータ5などからの駆動力で駆動されるアーム6を有している。アーム6は、先端にエンドエフェクタ7を有している。例えばロボット1で部品の運搬や組み立てなどを行う場合、エンドエフェクタ7としてこれらの部品を保持するためのハンドが用いられる。また、例えばロボット1で部品の検査などを行う場合、エンドエフェクタ7として対象となる部品を撮影するカメラなどが用いられる。
【0016】
このように、エンドエフェクタ7は、ロボット1を適用する工程に応じて任意に選択することができる。サーボモータ5からアーム6のエンドエフェクタ7までの間には、図示しない減速機構やリンクなどの駆動力伝達機構が設けられている。これにより、アーム6の先端に設けられているエンドエフェクタ7は、サーボモータ5からの駆動力によって駆動される。ロボット1と制御装置2との間は、接続ケーブル8によって接続されている。これにより、ロボット1の各軸を駆動するサーボモータ5、および作業を実施するエンドエフェクタ7は、制御装置2によって制御される。
【0017】
ティーチングペンダント3は、例えばユーザが携帯あるいは手に所持して操作可能な程度の大きさで、例えば薄型の略矩形箱状に形成されている。ティーチングペンダント3は、表面部の中央部に例えば液晶ディスプレイからなる表示部(表示手段)11を有している。表示部11には、各種の画面が表示される。表示部11は、タッチパネルで構成されている。またティーチングペンダント3には、表示部11の周囲に各種のキースイッチ12が設けられており、ユーザは、キースイッチ12やタッチパネルによって種々の入力操作を行う。
【0018】
ティーチングペンダント3は、ケーブル15を経由して制御装置2に接続され、通信インターフェイスを経由して制御装置2との間で高速のデータ転送を実行するようになっており、キースイッチ12等やタッチ操作により入力された操作信号等の情報はティーチングペンダント3から制御装置2へ送信される。また、制御装置2は、ティーチングペンダント3へ制御信号や表示用の信号などと共に駆動用の電力を供給する。
【0019】
ユーザは、上記のティーチングペンダント3を用いてロボット1の運転や設定などの各種の機能を実行可能であり、例えばキースイッチ12等を操作することで、予め記憶されている制御プログラムを呼び出して、ロボット1の起動や各種のパラメータの設定などを実行できる。また、ロボット1をマニュアル操作で動作させて各種の教示作業も実行可能であり、表示部11には、例えばメニュー画面、設定入力画面、状況表示画面など必要に応じて所望の画面が表示される。
【0020】
パソコン4は例えば汎用のノートパソコンなどであり、ユーザは、プログラミングソフトを実行させることでアプリケーションに応じてロボット1の動作手順などを記述した動作プログラムを作成できる。このパソコン4は、ケーブル16を経由して制御装置2に接続されており、作成されたロボット1の動作プログラムは、パソコン4から制御装置2へ転送される。
【0021】
次に、本実施例の作用について図1及び図2も参照して説明する。図1は、ティーチングペンダント3の表示部11より、操作者がタッチ入力を行う場合の画面表示例を示している。基本的な操作のプロセスは、複数の選択候補に対応する入力ボタン(選択ボタン)のシンボルが画面に表示され、操作者がそれらの何れか1つにタッチすることで選択を行う選択段階と、選択した候補を確定させる入力ボタン(確定ボタン)のシンボルが画面に表示され、操作者が確定ボタンにタッチすることで確定させる確定段階とからなっている。また、確定段階では、上記確定ボタンと共に、選択した候補を操作者に確認させるためのメッセージも表示されるようになっている。
【0022】
この場合、表示部11の画面は、図1(a)に示すように、概ね、複数の選択ボタン21(「操作1」〜「操作4」)の一群が表示される選択ボタン表示領域22と、上記の確認メッセージ23を表示させる確認メッセージ表示領域24とに分割される。図1(a)では、画面内に表示されるシンボルやメッセージを全て同時に示している。そして、4つの選択ボタン21(シンボルは横長矩形状である)が画面の右辺に沿って縦一列に並ぶことで、選択ボタン表示領域22が画面右側に縦長の矩形をなすように配置されている。尚、この場合、操作者は「右利き」であることを想定している。
【0023】
確認メッセージ表示領域24は横長の矩形をなしており、その上辺が画面の上辺に沿うように寄せて配置されている。また、画面には、選択ボタン表示領域22,確認メッセージ表示領域24を除く、画面の左下から下辺に沿った部分は横長の矩形となる余白スペース25となっており、当該スペース25の内部となる画面の左下隅部に確定ボタン26(「起動」,シンボルは横長矩形状)が表示されている。
【0024】
図1(b)〜(d)は、操作者が表示部11にタッチ入力を行うことで、選択段階から確定段階に至る画面表示の変化を示している。図1(b)に示す選択段階の画面では、選択ボタン表示領域22に4つの選択ボタン21だけが表示される。そして、操作者は、右手の例えば人差し指により選択ボタン21の1つ,例えば「操作1」にタッチして「操作1」を選択する。
【0025】
すると、画面は図1(c)に示す状態,確定段階に移行し、選択ボタン表示領域22における選択ボタン21の表示は消去され、確認メッセージ表示領域24には、操作者が「操作1」を選択したことの確認を促すためのメッセージが表示される。それと同時に、確定ボタン26も表示される。そして、操作者が、表示されたメッセージを視認して「操作1」の選択に間違いがなければ、図1(d)に示すように、右手を画面左下の確定ボタン26に移動させて人差し指でタッチする。これで、一連の入力動作が完了する。
【0026】
尚、図1(d)には、操作者の右手が「操作1」の選択ボタン21の位置から確定ボタン26の位置に移動する場合の、右手の移動範囲を2点鎖線で図示しているが、その移動範囲は、確認メッセージ表示領域24とほとんど重複しないようになっている。また、図1(c)には図示しないが、選択段階における操作者の選択が間違っていたり、指先のぶれ等による誤入力であった場合には、その選択を取り消してやり直させることは勿論である。そのため、図1(c)において余白スペース25内に、例えば確定ボタン26の右隣に「取消し」,「キャンセル」ボタンのシンボルや、「戻る」ボタンのシンボルを表示させ、操作者がそのボタンにタッチした場合には図1(b)の画面に戻して、再度選択段階からやり直させるようにする。
【0027】
図2は、図1をより具体的なケースに適用した場合の表示例を示す。この例では、4つの選択ボタン21:「PRO1」〜「PRO4」によって、ロボット1の動作プログラムの1つを選択するようになっている。また、上述したように、選択を誤った場合にやり直すための「キャンセル」ボタン27も表示している。
図2(b)に示す選択段階の画面において、操作者が選択ボタン21の1つ「PRO1」にタッチして選択すると、画面は図2(c)に示す状態に移行し、確認メッセージ表示領域24に、操作者が「PRO1」を選択したことの確認を促すためのメッセージ「“PRO1”を起動します。ロボットが動作しますので動作範囲の外で“起動”を押してください。」が表示される。それと同時に、確定ボタン26,キャンセルボタン27も表示される。
【0028】
そして、操作者が、表示されたメッセージを視認して「PRO1」の選択に間違いがなければ、図2(d)に示すように確定ボタン26にタッチする。また、図2(c)に示す状態において、「PRO1」の選択が間違いであった場合は、キャンセルボタン27にタッチすることで図2(b)の画面に戻るようにする。
【0029】
以上のように本実施例によれば、ティーチングペンダント3が備える表示部11の表示領域に、少なくとも選択ボタン表示領域22と確認メッセージ表示領域24とを分割配置し、確認メッセージ表示領域24を、その長辺部が操作者から見て表示画面の上辺に沿うように寄せて配置し、選択ボタン表示領域22を、その長辺部が画面の右辺に沿うように寄せて配置した。そして、選択段階では、複数の選択ボタン21を選択ボタン表示領域22に表示させ、確定段階では、選択段階で選択された候補を操作者に確認させる確認メッセージ23を確認メッセージ表示領域24に表示させると共に、確定入力を行うための確定ボタン26を、選択ボタン表示領域22外の余白スペース25に配置した。
【0030】
すなわち、確認メッセージ表示領域24は、画面の上辺と、選択ボタン表示領域22が位置する側の右辺に対向する左辺側とに沿って広がるスペースに配置されるので、選択段階において操作者の右手の指が選択ボタン21の何れかにタッチすれば、対応する候補の選択を確認させるメッセージ23は画面の上辺側に表示されるので、操作者は、自身の指先の方を見ていれば自ずと、その指により隠されることがない確認メッセージ23を明確に視認できる。そして操作者は、前記メッセージ23の内容により、選択を誤ったか否か、若しくはタッチ入力が誤って行われた否かを、選択候補を確定させる以前に確認できるので、誤入力による不用意な指令の出力を回避できる。また、指先の移動ラインの上方に確認メッセージ23が表示されるので、自己の指先を移動させるために目線が行っている操作者の注意を、確認メッセージ23に誘導し易くなる。
【0031】
また、確認メッセージ23は、操作者の指が選択ボタン21にタッチした後確定ボタン26の位置に移動するまでの間に操作者の右手によって遮られないので、確定ボタン26にタッチ入力が行われる直前まで確認メッセージ23を操作者に視認させることができる。更に、選択段階から確定段階に移行する際に複数の選択ボタン21の画像を消去するので、余分な画像を排除して画面をより見易くできる。
【0032】
(第2実施例)
図4は第2実施例であり、第1実施例と同一部分には同一符号を付して説明を省略し、以下異なる部分について説明する。第2実施例は、表示部11における画面の表示形態が第1実施例とは異なっている。図4は図1相当図であり、確認メッセージ表示領域28は、第1実施例の領域24と同様に、画面左上隅より横長矩形状に広がっているが、その表示面積は、縦方向にやや圧縮されている。
【0033】
そして、画面のおよそ下半分を占める部分が選択ボタン表示領域29となっており、その領域内には、4つの選択ボタン21が2列に亘って配置されている。第1列には「操作1」〜「操作3」のシンボルが横並びで表示され、第2列の「操作1」の行に対応する位置(画面の左下隅)には「操作4」のシンボルが表示されている。この場合、第2列の「操作2」,「操作3」の行に対応する位置にはシンボルが表示されずブランクとなるが、当該部分にその他のシンボルを表示することもないので、そのブランク部分も含めて選択ボタン表示領域29とする。
すると、画面の右上側が余白スペース30となるが、そのスペース30の上端(画面の右上隅)に確定ボタン26が配置されている。
【0034】
次に、第2実施例の作用について図4(b)〜(d)も参照して説明する。図4(b)に示す選択段階の画面では、選択ボタン表示領域29に複数の選択ボタン21だけが表示され、操作者は、右手の人差し指により選択ボタン21の1つ,例えば「操作1」にタッチして「操作1」を選択する。すると、画面は図4(c)に示す状態に移行し、選択ボタン表示領域29における選択ボタン21の表示は消去され、確認メッセージ表示領域28に、操作者が「操作1」を選択したことの確認を促すためのメッセージが表示される。それと同時に、確定ボタン26も画面の右上隅に表示される。そして、操作者が、表示されたメッセージを視認して「操作1」の選択に間違いがなければ、図4(d)に示すように、右手を画面右上の確定ボタン26に移動させて人差し指でタッチする。
尚、図4(d)にも、操作者の右手が「操作1」の選択ボタン21の位置から確定ボタン26の位置に移動する場合の、右手の移動範囲を2点鎖線で図示しているが、その移動範囲は、やはり確認メッセージ表示領域28とほとんど重複しないようになっている。
【0035】
以上のように第2実施例によれば、選択ボタン表示領域29を、操作者から見て画面の下辺側に配置し、確定ボタン26を、画面の上辺側で且つ確認メッセージ表示領域28の右側に隣接させて配置した。したがって、操作者の指が画面の下辺側に表示される選択ボタン21の何れかにタッチした場合でも、画面の上辺側に表示される確認メッセージ23を容易に視認できる。そしてこの場合も、操作者の右手の指が選択ボタン21にタッチした後確定ボタン26にタッチする直前まで、確認メッセージ23を操作者に視認させることができる。
【0036】
(第3実施例)
図5は第3実施例であり、第2実施例と同様に、表示部11における画面表示形態のバリエーションを示す。確認メッセージ表示領域31は、画面のおよそ上半分を占める横長矩形状となっており、画面下側の右辺寄りの部分が選択ボタン表示領域32となっている。その領域内には、4つの選択ボタン21が2行2列で配置されている。第1列には「操作1」,「操作2」のシンボルが横並びで表示され、第2列には「操作3」,「操作4」のシンボルが表示されている。すると、画面の左下側が余白スペース33となるが、そのスペースの下端(画面の左下隅)に確定ボタン26が配置されている。
【0037】
次に、第3実施例の作用について図5(b)〜(d)も参照して説明する。図5(b)に示す選択段階の画面では、選択ボタン表示領域32に複数の選択ボタン21だけが表示され、操作者は、右手の人差し指により選択ボタン21の1つ,例えば「操作2」にタッチして選択する。
すると、画面は図5(c)に示す状態に移行し、選択ボタン表示領域32における選択ボタン21の表示は消去され、確認メッセージ表示領域31に、操作者が「操作2」を選択したことの確認を促すためのメッセージが表示される。それと同時に、確定ボタン26も画面の左下隅に表示される。そして、操作者が、表示されたメッセージを視認して「操作2」の選択に間違いがなければ、図5(d)に示すように、右手を画面左下の確定ボタン26に移動させて人差し指でタッチする。
尚、図5(d)にも、操作者の右手が「操作2」の選択ボタン21の位置から確定ボタン26の位置に移動する場合の右手の移動範囲を2点鎖線で図示しているが、その移動範囲は、やはり確認メッセージ表示領域31とほとんど重複しないようになっている。
【0038】
以上のように第3実施例によれば、選択ボタン表示領域32を画面の下辺右側に配置し、確定ボタン26を、画面の下辺側で且つ選択ボタン表示領域32の左側に隣接させて配置した。この場合も、第2実施例と同様に、操作者の指が選択ボタン21の何れかにタッチした状態で、操作者は確認メッセージ23を容易に視認できる。そして、操作者の右手の指が選択ボタン21にタッチした後確定ボタン26にタッチする直前まで、確認メッセージ表示領域31に表示される確認メッセージ23を操作者に視認させることができる。
【0039】
(第4実施例)
図6は本発明に係る第4実施例であり、やはり表示部11における画面表示形態のバリエーションを示す。確認メッセージ表示領域33は、第1実施例と同様に設定されている。そして、選択ボタン表示領域34も、第1実施例と同様に画面の右辺に沿って配置されているが、選択ボタン21は「操作1」〜「操作3」の3つだけ表示されており、「操作4」に対応する位置に確定ボタン26が表示されている。すなわち、確認メッセージ表示領域33と、選択ボタン表示領域34とを除く画面の下方側が余白スペース35となっており、その余白スペース35の右端(画面の右下隅)に確定ボタン26が表示されている。
尚、この表示レイアウトは相対的なものであるから、画面の縦方向サイズに余裕があれば選択ボタン21を「操作4」まで表示させ、「操作4」の下に確定ボタン26を表示しても良いし、画面のサイズに余裕がない場合でも、各選択ボタン21や確定ボタン26の表示サイズを若干小さくすることで上記と同様に表示しても良い。
【0040】
次に、第4実施例の作用について図6(b)〜(d)も参照して説明する。図6(b)に示す選択段階の画面では、選択ボタン表示領域34に複数の選択ボタン21だけが表示され、操作者は、右手の人差し指により選択ボタン21の1つ,例えば「操作1」にタッチして選択する。
すると、画面は図6(c)に示す状態に移行し、選択ボタン表示領域34における選択ボタン21の表示は消去され、確認メッセージ表示領域33に、操作者が「操作1」を選択したことの確認を促すためのメッセージ23が表示される。それと同時に、確定ボタン26も画面の右下隅に表示されるが、この場合、確定ボタン26は、操作者の右手に遮られるため、操作者が直接視認できない,若しくは視認し難い状態になる。
【0041】
したがって、操作者は、右手を一旦画面からどけて表示を確認してから、確定ボタン26にタッチしようとする。その間に、確認メッセージ23の内容を認識するための時間が生じるので、操作者は、「操作1」の選択が適切であったかどうかを十分に確認することができる。
【0042】
以上のように第4実施例によれば、確定ボタン26を、操作者の右手の指が選択ボタン21の何れかにタッチする位置に到達した状態で、操作者の右手によって隠れる位置に配置した。具体的には、選択ボタン表示領域34を、操作者から見て画面の右辺側に寄せて配置し、確定ボタン26を選択ボタン表示領域34の下端に隣接して配置した。
すなわち、操作者が、確定ボタン26の上方に位置する選択ボタン21に右手の指でタッチしようとすれば確定ボタン26を操作者が視認し難い状態にでき、操作者は、一旦右手を画面の外に移動させて確定ボタン26の表示位置を確認するので、その過程で表示されている確認メッセージ23を視認するための時間的猶予が発生し、選択候補の確認が一層確実に行われるようになる。また、操作者が確定ボタン26を探すまでの時間も発生するので、自身が選択した選択ボタン21につき選択の適否を再考する時間が与えられ、選択候補を確認する確実性を高めることができる。
【0043】
(第5実施例)
図7は本発明に係る第5実施例であり、やはり表示部11における画面表示形態のバリエーションを示す。確認メッセージ表示領域31は、第3実施例と同様に設定されており、選択ボタン表示領域36は、画面下方側の中央部に配置され、選択ボタン21は「操作1」,「操作2」の3つだけ表示されている。したがって、選択ボタン表示領域36の左右両側が余白スペース37(L,R)となるが、余白スペース37R側(画面の右下隅)に確定ボタン26が表示されている。
【0044】
次に、第5実施例の作用について図7(b)〜(d)も参照して説明する。図7(b)に示す選択段階の画面では、選択ボタン表示領域36に2つの選択ボタン21だけが表示され、操作者は、右手の人差し指により選択ボタン21の1つ,例えば「操作1」にタッチして選択する。
すると、画面は図7(c)に示す状態に移行し、選択ボタン表示領域36における選択ボタン21の表示は消去され、確認メッセージ表示領域31に、操作者が「操作1」を選択したことの確認を促すためのメッセージが表示される。それと同時に、確定ボタン26も画面の右下隅に表示されるが、この場合も第4実施例と同様に、確定ボタン26は、操作者の右手に遮られるため、操作者が直接視認し難い状態になる。
【0045】
したがって、操作者は、右手を一旦画面からどけて表示を確認してから、確定ボタン26にタッチしようとする。その間に、確認メッセージ23の内容を認識するための時間が生じるので、操作者は、「操作1」の選択が適切であったかどうかを十分に確認することができる。
【0046】
以上のように第5実施例によれば、選択ボタン表示領域36を画面下辺側の中央に配置し、確定ボタン26を、画面の下辺側で且つ選択ボタン表示領域36の右側に隣接して配置したので、操作者が、選択ボタン21に右手の指でタッチしようとした場合に、確定ボタン26を操作者が視認し難い状態にできる。
【0047】
本発明は上記し又は図面に記載した実施例にのみ限定されるものではなく、以下のような変形又は拡張が可能である。
操作者の利き手が左手である場合には、各実施例毎に画面左右の配置を以下のように逆に設定すれば良い。
第1実施例:選択ボタン表示領域22を左側,起動ボタン26を右側に配置
第2実施例:確認メッセージ表示領域28を右側,起動ボタン26を左側に配置
第3実施例:選択ボタン表示領域32を左側,起動ボタン26を右側に配置
第4実施例:選択ボタン表示領域34及び起動ボタン26を左側に配置
第5実施例:起動ボタン26を左側に配置
また、操作者に自身の利き手の左右を入力させ、その入力結果に応じて画面の配置を変更しても良い。
選択ボタンの配置数は、適宜変更すれば良い。
選択する対象はロボットの動作プログラムに限ることなく、例えばティーチングを行う場合の手先の移動方向などでも良い。
【符号の説明】
【0048】
図面中、1はロボット、2は制御装置(コントローラ)、3はティーチングティーチングペンダント(タッチパネル式入力装置)、11は表示部(表示手段)、21は選択ボタン、22は選択ボタン表示領域、23は確認メッセージ、24は確認メッセージ表示領域、26は確定ボタン、28は確認メッセージ表示領域、29は選択ボタン表示領域、31は確認メッセージ表示領域、32は選択ボタン表示領域、33は確認メッセージ表示領域、34,36は選択ボタン表示領域を示す。
【特許請求の範囲】
【請求項1】
ロボットを制御するコントローラに接続され、操作者により入力された情報を前記コントローラに出力するもので、画面に表示させた入力ボタンの位置にユーザがタッチすることで入力を行うタッチパネル式入力装置において、
前記情報を出力するまでに、少なくとも、複数の選択候補から何れか1つを選択する選択段階と、選択した候補を確定させる確定段階とを経る場合に、
矩形をなす前記画面の表示領域は、少なくとも、それぞれ概ね矩形をなす選択ボタン表示領域と確認メッセージ表示領域とに分割され、
前記確認メッセージ表示領域は、その長辺部が操作者から見て前記表示画面の上辺に沿うように配置され、前記選択ボタン表示領域は、その長辺部が前記上辺を除く3辺の何れかに沿うように配置され、
前記選択段階では、前記複数の選択候補に対応する複数の選択ボタンを、前記選択ボタン表示領域に少なくとも一列をなすように表示させ、
前記確定段階では、前記選択段階で選択された候補を前記操作者に確認させるためのメッセージを前記確認メッセージ表示領域に表示させ、前記確定入力を行うための確定ボタンを、前記選択ボタン表示領域の外に配置すると共に、操作者の指が前記選択ボタンの何れかにタッチする位置に到達した状態で、前記操作者の手によって隠れる位置に配置することを特徴とするタッチパネル式入力装置。
【請求項2】
前記選択ボタン表示領域は、操作者から見て前記画面の左辺,右辺の何れか一方側に寄せて配置されており、
前記確定ボタンは、前記選択ボタン表示領域の下端に隣接して配置されることを特徴とする請求項1記載のタッチパネル式入力装置。
【請求項3】
前記選択ボタン表示領域は、操作者から見て前記画面の下辺側に配置され、
前記確定ボタンは、前記画面の下辺側で、且つ前記選択ボタン表示領域に隣接して配置されることを特徴とする請求項1記載のタッチパネル式入力装置。
【請求項4】
前記選択段階から前記確定段階に移行する際に、前記複数の選択ボタンの画像が消去されることを特徴とする請求項1乃至3の何れかに記載のタッチパネル式入力装置。
【請求項5】
ロボットを制御するコントローラに接続され、操作者により入力された情報を前記コントローラに出力するもので、画面に表示させた入力ボタンの位置にユーザがタッチすることで入力を行うタッチパネル式入力装置に適用され、前記画面の表示を行う方法において、
前記情報を出力するまでに、少なくとも、複数の選択候補から何れか1つを選択する選択段階と、選択した候補を確定させる確定段階とを経る場合に、矩形をなす前記画面の表示領域を、少なくとも、それぞれ概ね矩形をなす選択ボタン表示領域と確認メッセージ表示領域とに分割し、
前記確認メッセージ表示領域を、その長辺部が操作者から見て前記表示画面の上辺に沿うように配置すると共に、前記選択ボタン表示領域を、その長辺部が前記上辺を除く3辺の何れかに沿うように配置し、
前記選択段階では、前記複数の選択候補に対応する複数の選択ボタンを、前記選択ボタン表示領域に少なくとも1列をなすように表示し、
前記確定段階では、前記選択段階で選択された候補を前記操作者に確認させるためのメッセージを前記確認メッセージ表示領域に表示し、前記確定入力を行うための確定ボタンを、前記選択ボタン表示領域の外に配置すると共に、操作者の指が前記選択ボタンの何れかにタッチする位置に到達した状態で、前記操作者の手によって隠れる位置に配置することを特徴とするタッチパネル式入力装置の画面表示方法。
【請求項6】
前記選択ボタン表示領域を、操作者から見て前記画面の左辺,右辺の何れか一方側に寄せて配置し、
前記確定ボタンを、前記選択ボタン表示領域の下端に隣接させて配置することを特徴とする請求項5記載のタッチパネル式入力装置の画面表示方法。
【請求項7】
前記選択ボタン表示領域を、操作者から見て前記画面の下辺側に配置し、
前記確定ボタンを、前記画面の下辺側で、且つ前記選択ボタン表示領域に隣接させて配置することを特徴とする請求項5記載のタッチパネル式入力装置の画面表示方法。
【請求項8】
前記選択段階から前記確定段階に移行する際に、前記複数の選択ボタンの画像を消去することを特徴とする請求項5乃至7の何れかに記載のタッチパネル式入力装置の画面表示方法。
【請求項1】
ロボットを制御するコントローラに接続され、操作者により入力された情報を前記コントローラに出力するもので、画面に表示させた入力ボタンの位置にユーザがタッチすることで入力を行うタッチパネル式入力装置において、
前記情報を出力するまでに、少なくとも、複数の選択候補から何れか1つを選択する選択段階と、選択した候補を確定させる確定段階とを経る場合に、
矩形をなす前記画面の表示領域は、少なくとも、それぞれ概ね矩形をなす選択ボタン表示領域と確認メッセージ表示領域とに分割され、
前記確認メッセージ表示領域は、その長辺部が操作者から見て前記表示画面の上辺に沿うように配置され、前記選択ボタン表示領域は、その長辺部が前記上辺を除く3辺の何れかに沿うように配置され、
前記選択段階では、前記複数の選択候補に対応する複数の選択ボタンを、前記選択ボタン表示領域に少なくとも一列をなすように表示させ、
前記確定段階では、前記選択段階で選択された候補を前記操作者に確認させるためのメッセージを前記確認メッセージ表示領域に表示させ、前記確定入力を行うための確定ボタンを、前記選択ボタン表示領域の外に配置すると共に、操作者の指が前記選択ボタンの何れかにタッチする位置に到達した状態で、前記操作者の手によって隠れる位置に配置することを特徴とするタッチパネル式入力装置。
【請求項2】
前記選択ボタン表示領域は、操作者から見て前記画面の左辺,右辺の何れか一方側に寄せて配置されており、
前記確定ボタンは、前記選択ボタン表示領域の下端に隣接して配置されることを特徴とする請求項1記載のタッチパネル式入力装置。
【請求項3】
前記選択ボタン表示領域は、操作者から見て前記画面の下辺側に配置され、
前記確定ボタンは、前記画面の下辺側で、且つ前記選択ボタン表示領域に隣接して配置されることを特徴とする請求項1記載のタッチパネル式入力装置。
【請求項4】
前記選択段階から前記確定段階に移行する際に、前記複数の選択ボタンの画像が消去されることを特徴とする請求項1乃至3の何れかに記載のタッチパネル式入力装置。
【請求項5】
ロボットを制御するコントローラに接続され、操作者により入力された情報を前記コントローラに出力するもので、画面に表示させた入力ボタンの位置にユーザがタッチすることで入力を行うタッチパネル式入力装置に適用され、前記画面の表示を行う方法において、
前記情報を出力するまでに、少なくとも、複数の選択候補から何れか1つを選択する選択段階と、選択した候補を確定させる確定段階とを経る場合に、矩形をなす前記画面の表示領域を、少なくとも、それぞれ概ね矩形をなす選択ボタン表示領域と確認メッセージ表示領域とに分割し、
前記確認メッセージ表示領域を、その長辺部が操作者から見て前記表示画面の上辺に沿うように配置すると共に、前記選択ボタン表示領域を、その長辺部が前記上辺を除く3辺の何れかに沿うように配置し、
前記選択段階では、前記複数の選択候補に対応する複数の選択ボタンを、前記選択ボタン表示領域に少なくとも1列をなすように表示し、
前記確定段階では、前記選択段階で選択された候補を前記操作者に確認させるためのメッセージを前記確認メッセージ表示領域に表示し、前記確定入力を行うための確定ボタンを、前記選択ボタン表示領域の外に配置すると共に、操作者の指が前記選択ボタンの何れかにタッチする位置に到達した状態で、前記操作者の手によって隠れる位置に配置することを特徴とするタッチパネル式入力装置の画面表示方法。
【請求項6】
前記選択ボタン表示領域を、操作者から見て前記画面の左辺,右辺の何れか一方側に寄せて配置し、
前記確定ボタンを、前記選択ボタン表示領域の下端に隣接させて配置することを特徴とする請求項5記載のタッチパネル式入力装置の画面表示方法。
【請求項7】
前記選択ボタン表示領域を、操作者から見て前記画面の下辺側に配置し、
前記確定ボタンを、前記画面の下辺側で、且つ前記選択ボタン表示領域に隣接させて配置することを特徴とする請求項5記載のタッチパネル式入力装置の画面表示方法。
【請求項8】
前記選択段階から前記確定段階に移行する際に、前記複数の選択ボタンの画像を消去することを特徴とする請求項5乃至7の何れかに記載のタッチパネル式入力装置の画面表示方法。
【図1】


【図2】

【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−37722(P2013−37722A)
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【出願番号】特願2012−229733(P2012−229733)
【出願日】平成24年10月17日(2012.10.17)
【分割の表示】特願2009−27255(P2009−27255)の分割
【原出願日】平成21年2月9日(2009.2.9)
【出願人】(501428545)株式会社デンソーウェーブ (1,155)
【Fターム(参考)】
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【出願日】平成24年10月17日(2012.10.17)
【分割の表示】特願2009−27255(P2009−27255)の分割
【原出願日】平成21年2月9日(2009.2.9)
【出願人】(501428545)株式会社デンソーウェーブ (1,155)
【Fターム(参考)】
[ Back to top ]