
タッチパネル装置
【課題】操作者に指を叩く感触と指を擦る感触の両方を備えた隆起する触覚をフィードバックするタッチパネル装置を提供する。
【解決手段】タッチパネル103を操作している操作者に触覚をフィードバックするため、支持部材101上に構成された傾倒部材102を、操作者の押下による傾倒とアクチュエータ104による引き戻しを繰り返すように動作させる。この動作により、傾倒部材102の上部に置かれたタッチパネル103を通じて、操作者の指135にタッチパネル103が隆起したような触覚がフィードバックされる。
【解決手段】タッチパネル103を操作している操作者に触覚をフィードバックするため、支持部材101上に構成された傾倒部材102を、操作者の押下による傾倒とアクチュエータ104による引き戻しを繰り返すように動作させる。この動作により、傾倒部材102の上部に置かれたタッチパネル103を通じて、操作者の指135にタッチパネル103が隆起したような触覚がフィードバックされる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、タッチパネル装置に関し、特に、操作者が入力操作を行う際、その触覚を操作者にフィードバックする機能を備えるタッチパネル装置に関する。
【背景技術】
【0002】
タッチパネル装置は、電子機器の小型化や薄型化を実現できるため、携帯情報端末やデジタルカメラ、現金自動預け払い機(ATM :Automated Teller Machine)、カーナビゲーションなど、さまざまな電子機器に搭載されている。タッチパネル装置を操作する際、操作者の触れている指に触覚を与える機能は、触覚フィードバック機能と呼ばれ、操作性の向上に役立っている。たとえば、操作者の指にこのような触覚をフィードバックするための様々な手法として、特許文献1ないし3のような技術が知られている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−228161号公報
【特許文献2】特開2011−043925号公報
【特許文献3】特開2004−094389号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1の技術は、平面板の厚さ方向のストロークからパネル全体を振動させるため、操作者にフィードバックされる触覚は、押下に対する反発力のみとなり単調になりがちであった。また、特許文献2や3の技術は、触覚フィードバックのための振動発生手段に圧電素子を用いているため、振動量に限界があり操作者に十分な触覚をフィードバックできないという問題があった。
【0005】
本発明は、上記に鑑みてなされた発明であり、その主たる目的は、操作者に指を叩く感触と指を擦る感触の両方を備えた隆起する触覚をフィードバックすることが可能なタッチパネル装置を提供することにある。
【課題を解決するための手段】
【0006】
上記の目的を達成するため、本発明のタッチパネル装置は、支持部材と、前記支持部材上に設けられた傾倒部材と、前記傾倒部材上に載置されたタッチパネルと、前記傾倒部材の傾倒方向に磁路を形成するアクチュエータと、を備え、前記傾倒部材は、前記支持部材に連結される第1の連結部材と、前記タッチパネルに連結される第2の連結部材とを、有しており、前記アクチュエータに近接した前記傾倒部材は、軟磁性材料を含むことを特徴とする。
【0007】
本発明のタッチパネル装置によれば、操作者がタッチパネルを押下することにより、傾倒部材は自立した状態から傾倒し、同時にアクチュエータが動作する。傾倒部材の一端はアクチュエータから離れる方向に傾倒するものの、第1の連結部材で支持部材に連結され、第2の連結部材でタッチパネルに連結されているため、自立した状態に戻ろうとする。同時に、傾倒部材は軟磁性材料を含むため、アクチュエータが生成する磁力によって、自立する方向に引き戻される。タッチパネルが押下されるたびに、傾倒部材が傾倒する動きと、傾倒部材が引き戻される動きを繰り返すため、操作者には、タッチパネルから隆起するような触覚がフィードバックされる。
【0008】
本発明のタッチパネル装置において、前記第1の連結部材もしくは前記第2の連結部材の少なくともいずれか一方は、板ばねであることが好ましい。このような構成にすることによって、傾倒部材が自立する状態に戻ろうとする力が強くなるため、操作者には一層隆起する触覚がフィードバックされる。
【0009】
本発明のタッチパネル装置において、前記第1の連結部材もしくは前記第2の連結部材の少なくともいずれか一方は、磁石であることが好ましい。このような構成にすることによって、傾倒部材の傾倒方向が自在になり、操作者にはより柔軟な触覚がフィードバックされる。
【0010】
本発明のタッチパネル装置において、前記第1の連結部材もしくは前記第2の連結部材の少なくともいずれか一方は、エラストマーであることが好ましい。このような構成にすることによって、傾倒部材の傾倒方向が自在となり、操作者には様々な方向から隆起する触覚がフィードバックされる。
【0011】
本発明のタッチパネル装置において、前記アクチュエータは、前記傾倒部材が傾倒する方向に複数配置されていてもよい。このような構成にすることによって、傾倒した傾倒部材を引き戻す動きが、一段と強くなり、操作者にはより一層隆起する触覚がフィードバックされる。
【0012】
本発明のタッチパネル装置において、前記傾倒部材の傾斜角度を測定するセンサを設けることが好ましい。このように構成することによって、タッチパネルが押下された圧力に応じて、傾倒部材の傾倒角度が検知され、操作者には異なる大きさの触覚がフィードバックされる。
【発明の効果】
【0013】
本発明のタッチパネル装置によれば、操作者に指を叩く感触と指を擦る感触の両方を備えた隆起する触覚をフィードバックすることが可能となる。
【図面の簡単な説明】
【0014】
【図1】本発明の第1実施形態における触覚タッチパネル装置の斜視断面図である。
【図2】図1のAの部分拡大断面図である。
【図3】傾倒部材の構成例を示す模式図である。
【図4】傾倒部材の動作例を示す模式図である。
【図5】第1実施形態の傾倒部材の応用例を示す模式図であり、複数による板ばねを組み合わせて柱を構成した例を示す模式図である。
【図6】第1実施形態における傾倒部材の応用例を示す模式図であり、柱側に円筒(円柱)形状の凸部を設けて、接続他面に鉢状の凹部を設けた構成。
【図7】第1実施形態における傾倒部材の応用例を示す模式図であり、柱側に鉢状の凹部を設けて、接続他面に半円筒(半円柱)形状の凸部を設けた構成。
【図8】第1実施形態における傾倒部材の応用例を示す模式図であり、図5の形状の半円筒(半円柱)の径を柱よりも大きくした構成。
【図9】第1実施形態における傾倒部材の応用例を示す模式図であり、樹脂片を設けて傾倒角度を制限した構成。
【図10】第1実施形態における傾倒部材の応用例を示す模式図であり、第1の接続部材に永久磁石を用い、第2の接続部材に板ばね用いた例である。
【図11】第1実施形態における傾倒部材の応用例を示す模式図であり、回転のための軸を設けた構成。
【図12】第1実施形態における傾倒部材の応用例を示す模式図であり、低歪み材と高歪み材を組み合わせた柱の模式図である。
【図13】第2実施形態における傾倒部材の傾倒方向にアクチュエータを2つ配置した場合の断面模式図である。
【図14】第2実施形態の応用例の模式図である。
【図15】第3実施形態の傾斜角度を検出するための静電容量センサの模式図である。
【図16】第3実施形態における傾倒角度を検出するためのセンサを備えた触覚デバイスの機能ブロック図である。
【図17】第3実施形態における傾倒角度を検出するためのセンサを備えた、本デバイスの動作を示すフローチャートである。
【図18】第3実施形態における傾倒角度を検出するためのセンサを備えた触覚デバイスの動作の設定例を示す図である。
【図19】第3実施形態における傾倒角度を検出するためのセンサを備えた触覚デバイスの動作の設定値例を示す図である。
【図20】図18の第1エリアを指が通過するときの模式図である。
【図21】図18の第2エリア、特に第1エリア近傍、を操作者の指が通過するときの模式図である。
【図22】図18の第2エリア、特に第3エリア近傍、を操作者の指が通過するときの模式図である。
【図23】図18の第3エリアを操作者の指が通過するときの模式図である。
【発明を実施するための形態】
【0015】
以下、添付図面を参照しながら、本発明の好ましい実施の形態について詳細に説明する。
【0016】
(第1実施形態)
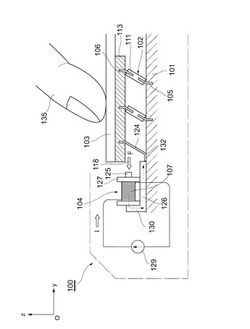
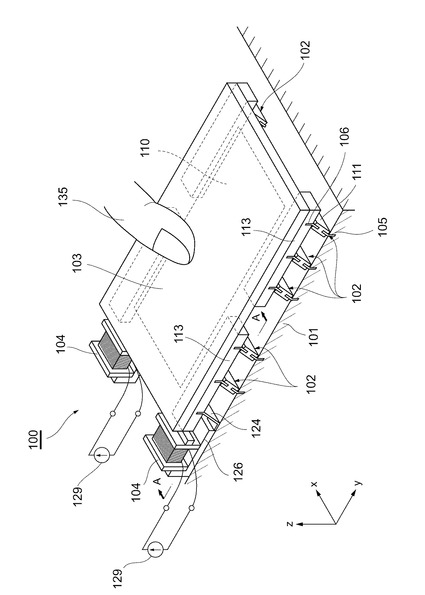
図1は、本発明の第1実施形態であるタッチパネル装置の斜視断面図である。本実施形態のタッチパネル装置は、支持部材101と、支持部材101上に配置された傾倒部材102と、前記傾倒部材上に配置されたタッチパネル103と、アクチュエータ104とにより構成される。
【0017】
傾倒部材102は、第1の連結部材105および第2の連結部材106である板ばね109とこの板ばねを保持する柱状部111とで構成される。傾倒部材102は、アクチュエータから生じる磁力に応答し、回転するように駆動するため、板ばね109もしくは柱状部111の少なくともいずれか一方は、軟磁性材料から形成される。
【0018】
傾倒部材102は、一端に設けられた第1の連結部材105である板ばね109を介して支持部材に連結され、他端に設けられた第2の連結部材106である板ばね109を介して、タッチパネル103に連結される。
【0019】
図1においては、傾倒部材102は支持部材101に直接連結されているが、支持部材101上に平板部113を設置して傾倒部材102をその平板部113に連結してもよい。同様に、タッチパネル103の下面に接するように平板部113を設け、この平板部113に連結してもよい。
【0020】
傾倒部材102は、タッチパネル103を支持するために、情報表示部110の映像を妨げないように、情報表示部110周辺に、少なくとも3つ以上が配置されていることが好ましい。
【0021】
本実施形態における情報表示部110とは、液晶ディスプレイ、有機ELディスプレイ、電子ペーパーなどのディスプレイ構成要素を示し、タッチパネル103とは、抵抗膜方式、静電容量方式、光学方式、超音波方式、などのタッチセンサを構成するパネルあるいは、そのパネルを支持するパネルを示している。
【0022】
第1および第2の連結部材を構成する板ばね109は、図1のように、第1の連結部材を構成する板ばねと第2の連結部材を構成する板ばねとに分かれていてもよいし、連続する1つの板ばねから形成されてもよい。
【0023】
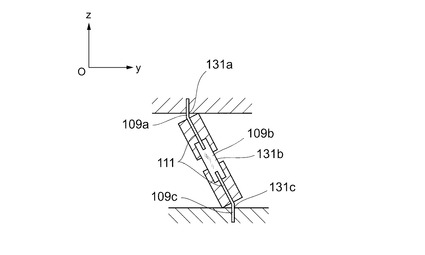
また、図5に示すとおり、第1の連結部材および第2の連結部材の板ばね109の他に、分割された柱状部111を繋ぐ板ばねを設けてもよい。このとき、第1および第2の連結部材の板ばね109と柱状部を繋ぐ板ばねとが互いに直交するように配置してもよい。このような構成にすることで傾倒方向が増え、異なる方向へも傾倒することが可能となる。
【0024】
具体的には、可動部131a、可動部131cにy−z平面に可動する板ばね109a、109cを用い、可動部131bに可動部131aと可動部131cと直交するx−z平面の可動する板ばね109bを用いている。この構成では、それぞれの可動部131により、x軸、y軸への傾倒動作を共に備えることが可能である。
【0025】
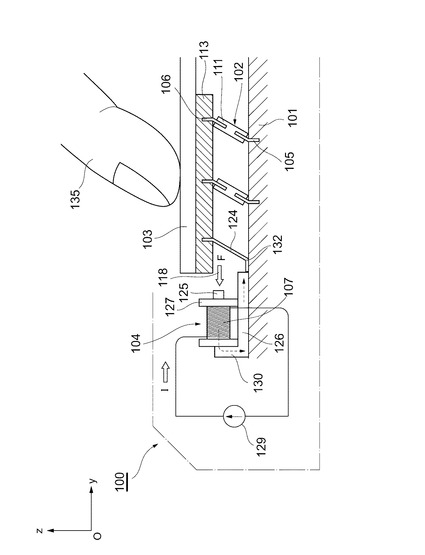
図2は、図1の破線領域を拡大した横断面図である。傾倒部材102のうち、最もアクチュエータ104に近い傾倒部材を、磁性体柱124のような別体の板ばねのみで構成してもよい。その場合は、傾倒部材102が支点部132を支点とし、中心に傾倒可能なように連結されていてもよい。この磁性体柱124は平板部113を通じて、他の傾倒部材と連動して動作する。傾倒部材102に板ばねを用いた場合は、ヤング率が大きい、10GPa以上のステンレス、黄銅、真鍮、パーマロイ、などの厚み1mm以下の薄板を用いることが望ましい。
【0026】
この磁性体柱124の一端が、アクチュエータ104に磁気的に接触していてもよい。アクチュエータ104は、磁心125とその外周に巻かれたコイル107と、磁心125と接触しているヨーク126によって構成されている。磁心125及びヨーク126は、電磁軟鉄、構造用炭素鋼、フェライト、珪素鋼板、鉄ダスト、などの磁性体で構成されている。コイル107は、ボビン127を介して磁心125と距離をとっても良いし、三層絶縁線など電気的に絶縁がとれるものであれば、磁心125に直接巻いてもよい。このような構成にすることで、磁性体柱124、磁心125、ヨーク126によって、ギャップつきの磁気回路128が形成され、アクチュエータ104が磁性体柱124を引き戻す力は一段と強くなる。
【0027】
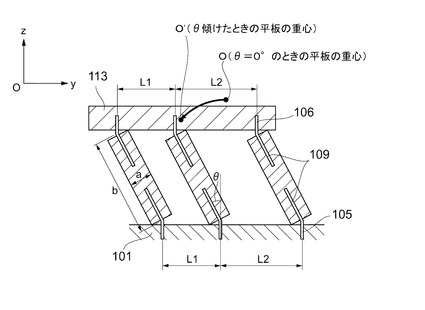
傾倒部材102は、図3に示すように、長さが等しい複数の傾倒部材102で構成することが好ましい。また、柱の設置間隔は、下面でL1ならば上面でもL1になるように、下面でL2ならば上面でもL2になるように、上下等間隔で設置することが好ましい。このように設置することで、平板の移動がx−yに対して平行になり、上部の乗せられたタッチパネル103の平行性を保つことが可能となり、タッチパネル103の変形を防止することが可能となる。
【0028】
傾倒部材102の長さbは、可動範囲を得るためには長く取ったほうが好ましいが、可動範囲を大きく取りすぎると、下に配置された情報表示部110の表示とタッチパネル103の座標がずれてしまうという問題があり、1〜20mmの場合が好ましい。柱は容易に傾倒できるように、高いアスペクト比を持っていることが好ましく、柱の最大幅をaとするとa、bのアスペクト比b/aが1以上であることが好ましい。
【0029】
コイル107には、電流を発生させるための、電流源129が接続されている。ここでいう電流源129とは、電流を生じさせることができる全般的な電流源を意味し、電流のON/OFFや電流量を制御できるものを示す。コイル107に電流を流すと、コイル107の内に配置された磁心125に磁束130が発生する。磁束130はヨーク126を通過して、磁性体柱124に流れる。この磁性体柱と磁心125は空間的に離れており、磁気回路128のギャップ間に実線矢印のように、パネルの水平方向に吸引力118が働く。この吸引力によって、傾倒部材102は、可動部131を支点部132として図のy−側に傾くことになる。このとき磁性体柱の上部に構成された平板部113上には、タッチパネル103が置かれているので、このタッチパネル103も同様にy−方向に変位する。
【0030】
図1、図2の例では、磁気回路128内に一つのコイル107のみを施したが、磁気回路128内の磁束130をリセットできるように、逆回転で巻かれたリセット用のコイル133を加えても良い。また、バイアス磁界を作るために磁路内に永久磁石を配置してもよい。また、コイルの位置を、磁路内の別の位置にしてもよい。また、磁心や磁性体柱のギャップ間隔を狭くするために、磁心の形状や、磁性体柱の形状を変えても良い。また、平板部を磁性体にして、平板部と磁心が接近するように構成してもよい。
【0031】
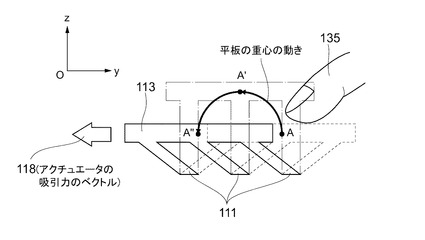
図4に傾倒部材102の動きの説明するための模式図を示す。傾倒部材102は同じ長さの柱により構成されているため、図の実線や破線のように動作する。すなわち、平板部113の重心部をA、A’、A’’、で示せば図のように円上に移動する。いまここで、平板の重心がAにあるとし、タッチパネル103に操作者の指135を置いていたとする。図では、説明を簡単にするためにタッチパネル103を省略して、平板部113の上に指を描く。このとき指135には、斜め下方からの円運動が伝わり、隆起したような触覚を得ることができる。なお、A’の時点でA方向あるいはA’’方向に傾倒部材102を倒しても摩擦により指135に間隔を与えることができるが、Aの状態からA’’に傾倒したり、A’’の状態からAに傾倒するほうが、隆起するようなよりはっきりとした刺激を指135に与えることが可能となる。
【0032】
傾倒部材102は板ばね109などの弾性を有する連結部材を備えているため、アクチュエータ104の駆動がないときや操作者の指135の圧力が無い場合は、図のA’の状態に戻ることができる。
【0033】
この動作はタッチパネル103の位置センシング動作と連動することが好ましい。タッチパネル103の位置センシング信号を取得することで、指135がタッチパネル103に触れているかどうかを判別することができる。
【0034】
指135が触れていると判別されたときに、電流源129に電流を通じ、アクチュエータ104を動作させることで、指135に刺激を与えるようにしてもよい。
【0035】
アクチュエータ104の駆動タイミングとしては、指135の圧下動作により、傾倒部材102がアクチュエータ104から離れるように動作している状態が好ましい。
【0036】
アクチュエータ104のコイル107に流す電流波形により、様々な触覚を実現することができる。
【0037】
例えば、コイル107に瞬間的に大きな電流を流すと、傾倒部材102は急激に、強く変位するため、指135に急激で、強い、隆起するような刺激を与えることができる。また、ON/OFFを繰り返すパルス状の電流をコイル107に流すと、アクチュエータの吸引力118は、断続的に強弱が変化する。アクチュエータの吸引力118は指135の力と逆向きのベクトルのため、傾倒部材102はy+、y−に振動する動作を行い、指135に小刻みに隆起を繰り返すような刺激を与えることができる。
【0038】
図6から図10に、傾倒部材102の変形例を示す。これら図6から図10の構成は、いずれも第2の連結部材106にのみ板ばねを用い、柱状部111と支持部材101とが連結される固定部112の構成を変形させた例である。
【0039】
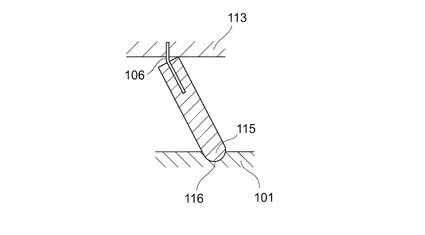
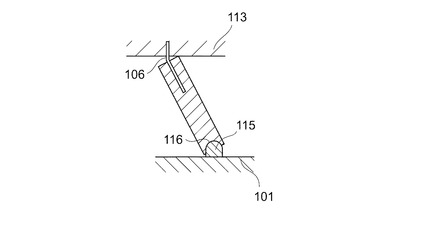
図6は傾倒部材102の一端に半円筒もしくは半球面形状の凸部を設けた構造であり、支持部材側に鉢状の凹部を設けている。この例のように半円筒もしくは半球面形状の凸部115と、鉢状の凹部116を設け、勘合する構成にすることで、より滑らかな円運動を実現することが可能になる。また、半円筒もしくは半球面形状の柱状部の端部と支持部材側の鉢状の凹部との間に、傾倒動作を滑らかにするためにグリースなどの潤滑材を注入してもよい。
【0040】
図7は、図6の例とは逆に柱状部側に鉢状の凹部を設け、支持部材側に凸部を設けた構造である。
【0041】
また、図8のように半円筒もしくは半球面形状を柱の直径よりも大きくしたり、小さくしてもよい。
【0042】
また、図9のように傾倒部材の傾倒角度を規制する樹脂片136などを置いてもよい。このようにすることで、タッチパネルが必要以上の力で押下されたとき、タッチパネル装置の損傷を防ぐことができる。
【0043】
また、図10のように、第2の連結部材を板ばねとし、第1の連結部材を、支持部材101の凹部に設けた磁石117と傾倒部材102の凸部に設けた磁石117とで構成してもよい。このようにすることで、磁石117どうしの吸引力を利用することができるようになる。
【0044】
傾倒部材102が支持部材101に対して垂直になるときに、支持部材側の磁石117と傾倒部材側の磁石117との間の磁力が最大になるように構成すれば、アクチュエータが駆動していないときであっても、傾倒部材を自立させることが可能となる。尚、磁石は、フェライト系、ネオジウム系、サマリウム系などの硬磁性体を磁化した永久磁石でもよいし、電磁石でもよい。
【0045】
また、図11のように、支持部材面に対し垂直となる壁部に横軸を設け、この横軸に柱状部が回転できるように先端部を勘合させてもよい。
【0046】
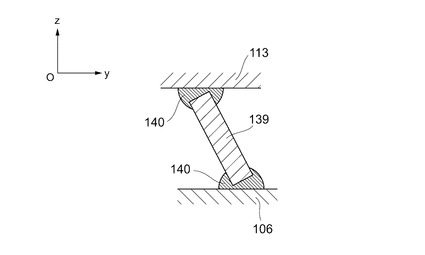
また、図12のように、傾倒部材を低歪み材からなる軟磁性を有する柱状部111(磁性柱139)と高歪み材140との組み合わせとし、高歪み材140を第1および第2の連結部材としてもよい。低歪み材139は例えば、フェライト、鉄、珪素鋼板などの軟磁性体や軟磁性体を混合した、ポリカーボネートやアクリル、PET(ポリエチレンテレフタレート)などの樹脂が用いられ、特に柱の断面積が1mm2〜500mm2であることが好ましい。一方、柱の接触面を高歪み材140にて平板部113や支持部材101と接合している。この高歪み材140には、天然ゴム、イソプロピレン、ブタジエンゴム、ウレタンゴム、シリコンゴム、等の0.1GPa以下のエラストマーで構成することが好ましい。
【0047】
以上のとおり、本実施形態のタッチパネル装置によれば、操作者がタッチパネル103を押下した際、傾倒部材102は、連結部材105、106の連結部を支点として、自立した傾倒部材102が押下方向に傾倒し、同時にアクチュエータ104が動作する。このとき、傾倒部材102と平板部113を連結する板ばね109は、アクチュエータ104から離れるように傾倒する。一端はアクチュエータ104から離れる方向に傾倒した傾倒部材102は、軟磁性を帯びた板ばね109を有しているため、アクチュエータ104が生成する磁力114によって、自立する方向に引き戻される。タッチパネル103が押下されるたびに、傾倒部材102が傾倒する動きと、傾倒部材102を構成する板ばね109が引き戻される動きを繰り返すため、操作者は、タッチパネル103から隆起するような触覚を得ることができる。
【0048】
(第2実施形態)
アクチュエータを、前記傾倒部材が傾倒する方向に互いに対向するように前記タッチパネルの両側に配置してもよい。このようにすることで、対向するどちら側でも吸引力118を発生させることが出来るようになり、操作者は2方向から隆起するような触覚を得ることができる。
【0049】
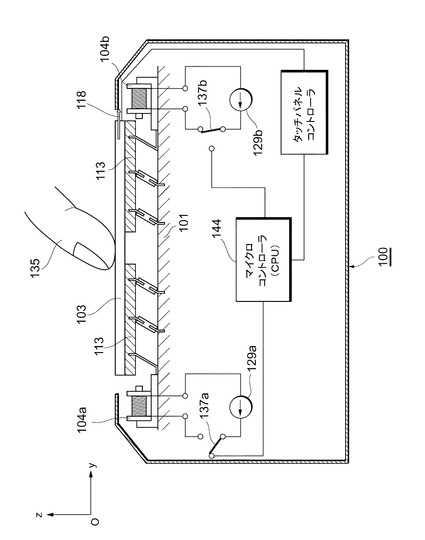
たとえば、図13のように、タッチパネル103のy−方向に配置したアクチュエータ104に加え、タッチパネル103を挟みこむように、y+方向にもアクチュエータ104を配置してもよい。このように傾倒部材102が傾倒する方向に互いにアクチュエータ104を配置することで、y+方向にも動作させることが可能になる。
【0050】
この実施形態では、y−方向のアクチュエータ104aに電流源129aをスイッチ素子137aを介して接続し、y+方向のアクチュエータ104bに電流源129bをスイッチ素子137bを介して接続している。然るに、スイッチ素子137aを開放にしたまま、スイッチ素子137bを閉じると、y+方向に傾倒部材102が倒れ、逆にスイッチ素子137bを開放にしたまま、137aを閉じると、y−方向に傾倒部材102が倒れる。スイッチ素子137は、トランジスタ、リレー、などの電子制御できるもので実現できる。またスイッチ素子137は、コントローラ138により制御される。このようにすることで、y−,y+方向どちらでも傾倒部材102を傾けることが可能となり、フィードバックされる触覚のバリエーションが増える。
【0051】
また、例えば、前記アクチュエータは、前記タッチパネルの互いに直交する方向に複数配置し、前記傾倒部材は、前記アクチュエータが形成する磁路の方向に傾倒可能な磁性体柱を有する構成にしてもよい。このようにすることで、直交する方向に傾倒させることも可能となる。
【0052】
具体的には、図14のように傾倒方向が直交する方向、すなわちx軸方向にもアクチュエータ104を配置してよい。さらに、x軸方向に傾倒可能な傾倒部材102も配置することで、x−y平面どちらにも傾倒可能になる。この構成では、y−軸方向とx−軸方向にアクチュエータ104を配置している。傾倒部材102には図7の半球形状の凸凹をもつ構造が用いられている。これら傾倒部材102は磁性体柱124で構成される。また、傾倒部材102が接する平板部113も磁性体で構成し、平板部113にてアクチュエータ104側に磁束130を誘導している。x−軸側のアクチュエータ104aとy−軸側のアクチュエータ104bにはそれぞれにコイル107が巻かれており、コイル107にはコントローラ138からの制御できる電流源129がそれぞれ取り付けられている。そのため、x軸方向、y軸方向それぞれ直交する方向に磁気回路128が形成されている。
【0053】
図1や図13のようなy軸方向のみに傾倒する構成では、y軸方向のアスペクト比のみを高めればよいが、この構成においては、傾倒部材102はx方向にもアスペクト比を高めることが好ましい。このようにすることでx方向に動作するアクチュエータ104aの吸引力118aにより、傾倒することが可能となる。傾倒部材102を、図6から図10に示した構成で実現することが可能である。
【0054】
また、電流増幅器を用いて電流源129の電流値を制御してもよいし、パルス波にてスイッチ素子137を駆動するようにしてもよい。また、コントローラ138にはタッチパネル103からの信号を入力し、この入力信号を元に、スイッチ素子137a、スイッチ素子137bの制御を行うようにしてもよい。
【0055】
コントローラ138からの指令により、電流源129aと電流源129bに発生させる電流によって、アクチュエータ104aとアクチュエータ104bの吸引力118が変化する。電流源129aのみに電流を流せば、アクチュエータ104aのみにx軸方向の吸引力118aが発生し、電流源129bのみに電流を流せば、アクチュエータ104bのみにy軸方向の吸引力118bが発生する。同時に電流を流せば、それぞれの吸引力118のベクトルの和の方向、すなわち、x軸とy軸の斜め方向に傾倒させることが出来る。すなわち、タッチパネル103の可動方向が増え、様々な方向から反力を指135に返すことができるようになる。
【0056】
(第3実施形態)
本実施形態では、傾倒部材102の傾倒角度120を検出する手段を備えている。傾倒角度120を検出することで、角度情報を制御コントローラ138へフィードバックすることが可能となり、操作者には傾倒角度に応じて異なる大きさの触覚がフィードバックされる。
【0057】
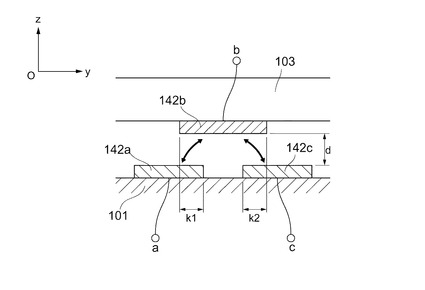
検出手段の例として図15に静電容量センサ141の模式図を示す。支持部材101側に電極142aと電極142cが取り付けられ、タッチパネル103側に電極142bが取り付けられている。図では省略しているが、y−およびy+側には本発明のアクチュエータ104が構成されている。ここで各電極の位置関係は、傾倒部材がy−方向に倒れこむ場合、電極142aと電極142bが接近し、傾倒部材がy+方向に倒れこむ場合、電極142bと電極142cが接近するようになっている。
【0058】
電極142aと電極142b間の静電容量Cは、電極142aと電極142bの対向部の面積に依存する静電容量C1と電極のエッジ部に構成される静電容量C2の和(C=C1+C2)で示される。C1は、電極142の奥行きをw、誘電率をε、対向面積をS、オーバーラップ距離k1、とすると、C1=εS/d=ε・w・k1/dで示される。y−方向に傾倒部材102が倒れると、タッチパネル103も弧を描きながら、移動するため、電極142aと電極142bが接近する。このとき、電極のz軸の距離dが小さくなるだけでなく、オーバーラップ距離k1が増加することになるので、k1/dが増加し、C1が増加する。C2は定式化することが困難であるが同様に電極間が近づくことで増加する。そのため、電極142aと電極142bの間が近づくことで静電容量Cは増加する。逆に、電極142bと電極142cの静電容量は、y+方向に傾倒部材102が倒れこむほど増加する。したがって、端子143aと端子143b間の静電容量を検出すれば、y−方向に傾倒したかどうかが確認でき、端子143bと端子143c間の静電容量を検出すれば、y+方向に傾倒したかどうかが確認できる。また、あらかじめ傾倒角度120と容量値の関係を測定しておけば、静電容量値の変化を検出することで傾倒角度120が推測可能であり、傾倒角度120をセンシングできる。
【0059】
上記例では、単純な平面的な電極142で構成したが、電極142の形をジグザグにするなどして対向面積を増やすなどの構成にしてもよい。対向面積が増加することで静電容量Cの変化量が増加し、センサの感度が向上する。また、電極142a、電極142cの代わりにホールセンサやMR(Magneto−resistive)素子、MI(Magneto−impedance)素子、GMR(Giant megneto−resistance)素子などの磁界を検出できるセンサ素子を配置し、電極142bの代わりに磁石、あるいは磁界発生のためのコイルを配置して、磁気的に傾きを検出してもよい。接近するほどセンサに働く磁界が強くなるので、センシングした磁界の強さから傾きの程度を得ることができる。
【0060】
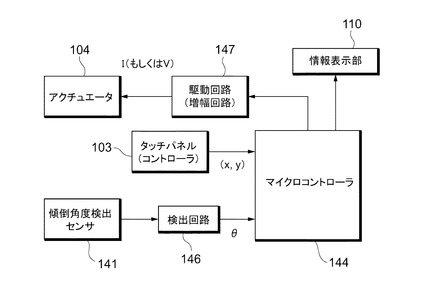
図16は、傾倒角度120を検出するためのセンサ141を備えた触覚デバイスの機能ブロック図である。センサ141の情報は検出回路146を通じてマイクロコントローラ144に入力される。同様にタッチパネル103の入力もマイクロコントローラ144に入力される。すなわち、マイクロコントローラ144には傾倒部材102の傾倒角度θ120とタッチパネル103のタッチ位置の情報(x、y)が入力される。アクチュエータ104は、駆動回路147を通じてマイクロコントローラ144からの制御が可能となっており、タッチパネル103と角度センサ141両方の入力に応じて様々な場面で触覚を作り出すことが可能となる。以下にソフトウェアと連携した二つの応用例を示す。
【0061】
一つ目の例では、アクチュエータ104の駆動を行うかどうかの判別に角度センサ141の値を応用する。この例のフローチャートを図17に示す。以下順にフローチャートを説明する。
【0062】
まず、S1およびS2のフローにて触覚発生領域のエリア座標情報と、傾倒角度の閾値θ‘の二つの駆動条件が設定され、メモリに格納される。
【0063】
続いて、S3では、タッチパネル103の位置情報(x、y)の値を取得する。その後のS4では、タッチパネル103から取得した位置情報(x、y)の値が触覚発生領域に入っているかを比較する。この領域に入っている場合には、後段のフローS5に移動し、逆に入っていなければ、前段のフローS1に移動する。
【0064】
S5では、傾倒角度センサ141の値θを取得する。非タッチ時には、指圧が加わっていないため|θ|はほぼゼロである。強くタッチし、指圧が加わることで|θ|の値は大きくなる。
【0065】
S6では、傾倒角度センサの値θと傾倒角度の閾値θ‘を比較する。指圧が加わっていない場合には、センサの値が閾値を越えることがない。すなわち、|θ’|>|θ|の関係が成り立つ。同様に指圧が弱い場合にもやはり、|θ’|>|θ|の関係が成り立つ。これら場合には、前段のフローS1へ移動させる。一方、指圧が強い場合には、センサの値が閾値を超えることになるので、|θ|≧|θ’|の関係が成り立つ。このときには後段のフローS7に移動するように設定する。
【0066】
S7にフローが移動すると、アクチュエータ104のコイルに電流を流し、傾倒部材102を反転し、指135に触覚を与える。操作者は強く押さえた後、逆向きの回転の触覚を得るので、押したことを強く確認できる。この応用は、ソフトウェア上のファイルやプログラムの削除の確認など、特に重要な場面での使用に適している。
【0067】
上記で説明した、フローチャートは、本デバイスの駆動タイミングのみのフローチャートであって、本フローチャートを関数化し、これと並列および従属するプログラム内に組み込まれていてもよい。また本説明では傾倒角度の比較に絶対値を用いたが、+、−などの符号つきで比較してもよい。
【0068】
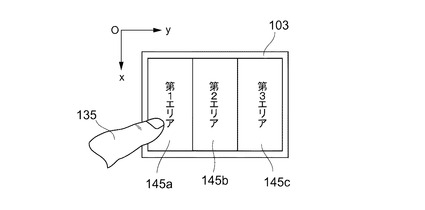
図18のように、タッチパネル103上に各エリアを設定し、傾倒角度120を変えることによって、z方向の高さを領域毎に随時変更し、操作者により立体的な触覚フィードバックすることも可能である。
【0069】
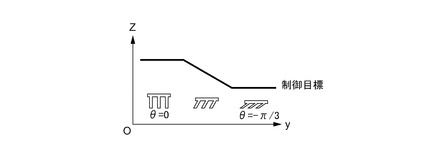
図19は、傾倒部材あるいはパネルのz方向に関する制御目標を示したグラフである。このグラフの内部の図は傾倒部材の傾きを模式化したものである。また、簡略に説明するために図では各エリアを実線で示したが、実際には、タッチパネル上の座標を基準に、ソフト的に設定するエリアであり、ソフト的な操作のみでエリアや制御目標の変更が可能である。この動作例では、第1エリア145aを、傾倒角度θを0rad(傾倒していない状態)とし、第3エリア145cの傾倒角度θを−π/3radとしている。第2エリア145bは、第1エリア145aと第3エリア145cを連続的に繋ぐように設けられたエリアである。
【0070】
情報表示部110に連動した、タッチパネル103に操作者が触れると、そのエリアに応じた制御目標まで、アクチュエータ104を駆動させて、傾倒部材102を傾ける。その後タッチパネル103から指135を離せば、傾倒角度θは0の位置まで戻るが、操作者がそのまま指135でタッチパネル103を押しているとき、タッチパネル103には指圧が加わることになる。指圧は一定値ではないので、制御していなければ指圧に応じて傾倒角度θが変化してしまう。そこで、センサ141で傾きを測定し、リアルタイムの傾き情報をマイクロコントローラ144へ送る。マイクロコントローラ144は制御目標とリアルタイムの傾き情報から差を計算し、必要な力118を発生させるようにアクチュエータ104を駆動し、傾きを維持させる。このフィードバックの応答が速ければ、操作者は頑なな触覚を得る。一方、フィードバックの応答が遅ければ、より弾性的な触覚を得る。
【0071】
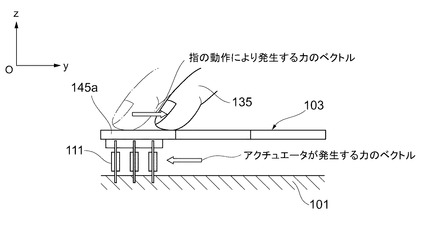
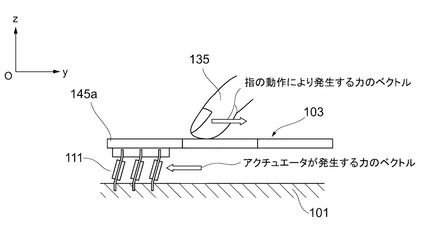
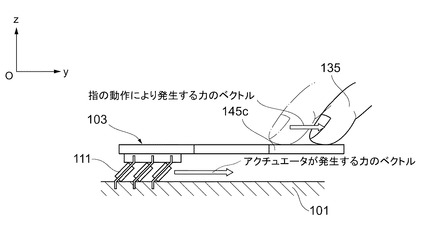
図20から図23は、動作を説明するための概略図である。この例では、操作者が第1エリア145aから第2エリア145bを経由して、第3エリア145cをまでを指135を滑らせるとする。図21は第1エリア145a内での動きを示している。このエリアの制御目標は傾きが0°であるので、指135から摩擦によって伝わってくる力に抗うように、アクチュエータ104からは、逆向きの力を発生させる。次に第2エリア145bの場合、指135の力よりもアクチュエータ104の逆向きの力を弱くしていく(図21)。さらに、傾倒部材102のばね性の反発力を考慮して右端に近くなるにつれ指135の力と同じ向きにアクチュエータ104の力を発生させる(図22)。最後に、第3エリア145cにおいては、同じ傾きを続けさせるために、指135からの力と同一の方向にアクチュエータ104の力を与える(図23)。
【0072】
図20から図23の動作において、第1エリア145a、第3エリア145cを通過するときには、指135は平面を滑る感覚を得ることができる。また第2エリア145bを通過するこきには、指135は斜面を滑る感覚を得ることができる。
【0073】
この例では、指135を滑らせたときに斜面の触覚を得るため、第2エリア135bのような第1エリア135aと第2エリア135cを線形的に繋ぐエリアを設定したが、第1エリア135aのようなz軸上の最も高いところから、急に第3エリア135cのような低いところへ変位してもよい。このように急激な変化を作ることで、操作者は凸凹を感じることなる。エリア135や傾倒角度120は、ソフト的な操作により変更可能なため、必要に応じて斜面や凸凹を作り出すことができる。
【0074】
また、この動作を行う間、傾倒角度120に応じてタッチパネル座標はディスプレイ表示に若干のずれが生じる。タッチパネル上のずれは、傾倒角度をθ、柱の長さをbとすると、b×sinθで示される。すなわちbが大きく、傾倒角度θが大きいほどタッチパネル座標がずれることになるが、傾倒部材102の角度情報はセンサ141によりマイクロコントローラ144に入力されているので、この情報を基にマイクロコントローラ144内でディスプレイ表示に合うように座標補正を行ってもよい。
【0075】
また、本例では、一つの平面的なタッチパネル上に三つのエリアを設定したが、タッチパネルを複数用意して、パネルごとにエリアを割り当ててもよい。
【0076】
また、加速度センサを設けてもよい。加速度センサの値より重力方向を検出し、重力方向の角度と傾倒部材102の傾きθを比較し、差分を計算し、アクチュエータ104出力を調整することで重力による角度補正を行ってもよい。
【符号の説明】
【0077】
100 タッチパネル装置、101 支持部材、102 傾倒部材、103 タッチパネル、104 アクチュエータ、105 第1の連結部材、106 第2の連結部材、
107 コイル、108 発生磁界、109 板ばね、110 情報表示部、111 柱状部、112 固定部、113 平板部、114 磁力、115 すり鉢状の凸部、116 半球、半円状の凹部、117 磁石、118 吸引力、119 角度検出センサ、120 傾倒角度、121 携帯機器、122 エラストマー、123 連結部材、124 磁性体柱、125 磁心、126 ヨーク、127 ボビン、128 磁気回路、129 電流源、130 磁束、131 可動部、132 支点部、133 リセット用コイル、134 非磁性体柱、135 指、136 樹脂片、137 スイッチ素子、138 コントローラ、139 低歪み材、140 高歪み材、141 検出センサ、142 電極、143 端子、144 マイクロコントローラ、145a 第1エリア、145b 第2エリア、145c 第3エリア、146 検出回路、147 駆動回路
【技術分野】
【0001】
本発明は、タッチパネル装置に関し、特に、操作者が入力操作を行う際、その触覚を操作者にフィードバックする機能を備えるタッチパネル装置に関する。
【背景技術】
【0002】
タッチパネル装置は、電子機器の小型化や薄型化を実現できるため、携帯情報端末やデジタルカメラ、現金自動預け払い機(ATM :Automated Teller Machine)、カーナビゲーションなど、さまざまな電子機器に搭載されている。タッチパネル装置を操作する際、操作者の触れている指に触覚を与える機能は、触覚フィードバック機能と呼ばれ、操作性の向上に役立っている。たとえば、操作者の指にこのような触覚をフィードバックするための様々な手法として、特許文献1ないし3のような技術が知られている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−228161号公報
【特許文献2】特開2011−043925号公報
【特許文献3】特開2004−094389号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1の技術は、平面板の厚さ方向のストロークからパネル全体を振動させるため、操作者にフィードバックされる触覚は、押下に対する反発力のみとなり単調になりがちであった。また、特許文献2や3の技術は、触覚フィードバックのための振動発生手段に圧電素子を用いているため、振動量に限界があり操作者に十分な触覚をフィードバックできないという問題があった。
【0005】
本発明は、上記に鑑みてなされた発明であり、その主たる目的は、操作者に指を叩く感触と指を擦る感触の両方を備えた隆起する触覚をフィードバックすることが可能なタッチパネル装置を提供することにある。
【課題を解決するための手段】
【0006】
上記の目的を達成するため、本発明のタッチパネル装置は、支持部材と、前記支持部材上に設けられた傾倒部材と、前記傾倒部材上に載置されたタッチパネルと、前記傾倒部材の傾倒方向に磁路を形成するアクチュエータと、を備え、前記傾倒部材は、前記支持部材に連結される第1の連結部材と、前記タッチパネルに連結される第2の連結部材とを、有しており、前記アクチュエータに近接した前記傾倒部材は、軟磁性材料を含むことを特徴とする。
【0007】
本発明のタッチパネル装置によれば、操作者がタッチパネルを押下することにより、傾倒部材は自立した状態から傾倒し、同時にアクチュエータが動作する。傾倒部材の一端はアクチュエータから離れる方向に傾倒するものの、第1の連結部材で支持部材に連結され、第2の連結部材でタッチパネルに連結されているため、自立した状態に戻ろうとする。同時に、傾倒部材は軟磁性材料を含むため、アクチュエータが生成する磁力によって、自立する方向に引き戻される。タッチパネルが押下されるたびに、傾倒部材が傾倒する動きと、傾倒部材が引き戻される動きを繰り返すため、操作者には、タッチパネルから隆起するような触覚がフィードバックされる。
【0008】
本発明のタッチパネル装置において、前記第1の連結部材もしくは前記第2の連結部材の少なくともいずれか一方は、板ばねであることが好ましい。このような構成にすることによって、傾倒部材が自立する状態に戻ろうとする力が強くなるため、操作者には一層隆起する触覚がフィードバックされる。
【0009】
本発明のタッチパネル装置において、前記第1の連結部材もしくは前記第2の連結部材の少なくともいずれか一方は、磁石であることが好ましい。このような構成にすることによって、傾倒部材の傾倒方向が自在になり、操作者にはより柔軟な触覚がフィードバックされる。
【0010】
本発明のタッチパネル装置において、前記第1の連結部材もしくは前記第2の連結部材の少なくともいずれか一方は、エラストマーであることが好ましい。このような構成にすることによって、傾倒部材の傾倒方向が自在となり、操作者には様々な方向から隆起する触覚がフィードバックされる。
【0011】
本発明のタッチパネル装置において、前記アクチュエータは、前記傾倒部材が傾倒する方向に複数配置されていてもよい。このような構成にすることによって、傾倒した傾倒部材を引き戻す動きが、一段と強くなり、操作者にはより一層隆起する触覚がフィードバックされる。
【0012】
本発明のタッチパネル装置において、前記傾倒部材の傾斜角度を測定するセンサを設けることが好ましい。このように構成することによって、タッチパネルが押下された圧力に応じて、傾倒部材の傾倒角度が検知され、操作者には異なる大きさの触覚がフィードバックされる。
【発明の効果】
【0013】
本発明のタッチパネル装置によれば、操作者に指を叩く感触と指を擦る感触の両方を備えた隆起する触覚をフィードバックすることが可能となる。
【図面の簡単な説明】
【0014】
【図1】本発明の第1実施形態における触覚タッチパネル装置の斜視断面図である。
【図2】図1のAの部分拡大断面図である。
【図3】傾倒部材の構成例を示す模式図である。
【図4】傾倒部材の動作例を示す模式図である。
【図5】第1実施形態の傾倒部材の応用例を示す模式図であり、複数による板ばねを組み合わせて柱を構成した例を示す模式図である。
【図6】第1実施形態における傾倒部材の応用例を示す模式図であり、柱側に円筒(円柱)形状の凸部を設けて、接続他面に鉢状の凹部を設けた構成。
【図7】第1実施形態における傾倒部材の応用例を示す模式図であり、柱側に鉢状の凹部を設けて、接続他面に半円筒(半円柱)形状の凸部を設けた構成。
【図8】第1実施形態における傾倒部材の応用例を示す模式図であり、図5の形状の半円筒(半円柱)の径を柱よりも大きくした構成。
【図9】第1実施形態における傾倒部材の応用例を示す模式図であり、樹脂片を設けて傾倒角度を制限した構成。
【図10】第1実施形態における傾倒部材の応用例を示す模式図であり、第1の接続部材に永久磁石を用い、第2の接続部材に板ばね用いた例である。
【図11】第1実施形態における傾倒部材の応用例を示す模式図であり、回転のための軸を設けた構成。
【図12】第1実施形態における傾倒部材の応用例を示す模式図であり、低歪み材と高歪み材を組み合わせた柱の模式図である。
【図13】第2実施形態における傾倒部材の傾倒方向にアクチュエータを2つ配置した場合の断面模式図である。
【図14】第2実施形態の応用例の模式図である。
【図15】第3実施形態の傾斜角度を検出するための静電容量センサの模式図である。
【図16】第3実施形態における傾倒角度を検出するためのセンサを備えた触覚デバイスの機能ブロック図である。
【図17】第3実施形態における傾倒角度を検出するためのセンサを備えた、本デバイスの動作を示すフローチャートである。
【図18】第3実施形態における傾倒角度を検出するためのセンサを備えた触覚デバイスの動作の設定例を示す図である。
【図19】第3実施形態における傾倒角度を検出するためのセンサを備えた触覚デバイスの動作の設定値例を示す図である。
【図20】図18の第1エリアを指が通過するときの模式図である。
【図21】図18の第2エリア、特に第1エリア近傍、を操作者の指が通過するときの模式図である。
【図22】図18の第2エリア、特に第3エリア近傍、を操作者の指が通過するときの模式図である。
【図23】図18の第3エリアを操作者の指が通過するときの模式図である。
【発明を実施するための形態】
【0015】
以下、添付図面を参照しながら、本発明の好ましい実施の形態について詳細に説明する。
【0016】
(第1実施形態)
図1は、本発明の第1実施形態であるタッチパネル装置の斜視断面図である。本実施形態のタッチパネル装置は、支持部材101と、支持部材101上に配置された傾倒部材102と、前記傾倒部材上に配置されたタッチパネル103と、アクチュエータ104とにより構成される。
【0017】
傾倒部材102は、第1の連結部材105および第2の連結部材106である板ばね109とこの板ばねを保持する柱状部111とで構成される。傾倒部材102は、アクチュエータから生じる磁力に応答し、回転するように駆動するため、板ばね109もしくは柱状部111の少なくともいずれか一方は、軟磁性材料から形成される。
【0018】
傾倒部材102は、一端に設けられた第1の連結部材105である板ばね109を介して支持部材に連結され、他端に設けられた第2の連結部材106である板ばね109を介して、タッチパネル103に連結される。
【0019】
図1においては、傾倒部材102は支持部材101に直接連結されているが、支持部材101上に平板部113を設置して傾倒部材102をその平板部113に連結してもよい。同様に、タッチパネル103の下面に接するように平板部113を設け、この平板部113に連結してもよい。
【0020】
傾倒部材102は、タッチパネル103を支持するために、情報表示部110の映像を妨げないように、情報表示部110周辺に、少なくとも3つ以上が配置されていることが好ましい。
【0021】
本実施形態における情報表示部110とは、液晶ディスプレイ、有機ELディスプレイ、電子ペーパーなどのディスプレイ構成要素を示し、タッチパネル103とは、抵抗膜方式、静電容量方式、光学方式、超音波方式、などのタッチセンサを構成するパネルあるいは、そのパネルを支持するパネルを示している。
【0022】
第1および第2の連結部材を構成する板ばね109は、図1のように、第1の連結部材を構成する板ばねと第2の連結部材を構成する板ばねとに分かれていてもよいし、連続する1つの板ばねから形成されてもよい。
【0023】
また、図5に示すとおり、第1の連結部材および第2の連結部材の板ばね109の他に、分割された柱状部111を繋ぐ板ばねを設けてもよい。このとき、第1および第2の連結部材の板ばね109と柱状部を繋ぐ板ばねとが互いに直交するように配置してもよい。このような構成にすることで傾倒方向が増え、異なる方向へも傾倒することが可能となる。
【0024】
具体的には、可動部131a、可動部131cにy−z平面に可動する板ばね109a、109cを用い、可動部131bに可動部131aと可動部131cと直交するx−z平面の可動する板ばね109bを用いている。この構成では、それぞれの可動部131により、x軸、y軸への傾倒動作を共に備えることが可能である。
【0025】
図2は、図1の破線領域を拡大した横断面図である。傾倒部材102のうち、最もアクチュエータ104に近い傾倒部材を、磁性体柱124のような別体の板ばねのみで構成してもよい。その場合は、傾倒部材102が支点部132を支点とし、中心に傾倒可能なように連結されていてもよい。この磁性体柱124は平板部113を通じて、他の傾倒部材と連動して動作する。傾倒部材102に板ばねを用いた場合は、ヤング率が大きい、10GPa以上のステンレス、黄銅、真鍮、パーマロイ、などの厚み1mm以下の薄板を用いることが望ましい。
【0026】
この磁性体柱124の一端が、アクチュエータ104に磁気的に接触していてもよい。アクチュエータ104は、磁心125とその外周に巻かれたコイル107と、磁心125と接触しているヨーク126によって構成されている。磁心125及びヨーク126は、電磁軟鉄、構造用炭素鋼、フェライト、珪素鋼板、鉄ダスト、などの磁性体で構成されている。コイル107は、ボビン127を介して磁心125と距離をとっても良いし、三層絶縁線など電気的に絶縁がとれるものであれば、磁心125に直接巻いてもよい。このような構成にすることで、磁性体柱124、磁心125、ヨーク126によって、ギャップつきの磁気回路128が形成され、アクチュエータ104が磁性体柱124を引き戻す力は一段と強くなる。
【0027】
傾倒部材102は、図3に示すように、長さが等しい複数の傾倒部材102で構成することが好ましい。また、柱の設置間隔は、下面でL1ならば上面でもL1になるように、下面でL2ならば上面でもL2になるように、上下等間隔で設置することが好ましい。このように設置することで、平板の移動がx−yに対して平行になり、上部の乗せられたタッチパネル103の平行性を保つことが可能となり、タッチパネル103の変形を防止することが可能となる。
【0028】
傾倒部材102の長さbは、可動範囲を得るためには長く取ったほうが好ましいが、可動範囲を大きく取りすぎると、下に配置された情報表示部110の表示とタッチパネル103の座標がずれてしまうという問題があり、1〜20mmの場合が好ましい。柱は容易に傾倒できるように、高いアスペクト比を持っていることが好ましく、柱の最大幅をaとするとa、bのアスペクト比b/aが1以上であることが好ましい。
【0029】
コイル107には、電流を発生させるための、電流源129が接続されている。ここでいう電流源129とは、電流を生じさせることができる全般的な電流源を意味し、電流のON/OFFや電流量を制御できるものを示す。コイル107に電流を流すと、コイル107の内に配置された磁心125に磁束130が発生する。磁束130はヨーク126を通過して、磁性体柱124に流れる。この磁性体柱と磁心125は空間的に離れており、磁気回路128のギャップ間に実線矢印のように、パネルの水平方向に吸引力118が働く。この吸引力によって、傾倒部材102は、可動部131を支点部132として図のy−側に傾くことになる。このとき磁性体柱の上部に構成された平板部113上には、タッチパネル103が置かれているので、このタッチパネル103も同様にy−方向に変位する。
【0030】
図1、図2の例では、磁気回路128内に一つのコイル107のみを施したが、磁気回路128内の磁束130をリセットできるように、逆回転で巻かれたリセット用のコイル133を加えても良い。また、バイアス磁界を作るために磁路内に永久磁石を配置してもよい。また、コイルの位置を、磁路内の別の位置にしてもよい。また、磁心や磁性体柱のギャップ間隔を狭くするために、磁心の形状や、磁性体柱の形状を変えても良い。また、平板部を磁性体にして、平板部と磁心が接近するように構成してもよい。
【0031】
図4に傾倒部材102の動きの説明するための模式図を示す。傾倒部材102は同じ長さの柱により構成されているため、図の実線や破線のように動作する。すなわち、平板部113の重心部をA、A’、A’’、で示せば図のように円上に移動する。いまここで、平板の重心がAにあるとし、タッチパネル103に操作者の指135を置いていたとする。図では、説明を簡単にするためにタッチパネル103を省略して、平板部113の上に指を描く。このとき指135には、斜め下方からの円運動が伝わり、隆起したような触覚を得ることができる。なお、A’の時点でA方向あるいはA’’方向に傾倒部材102を倒しても摩擦により指135に間隔を与えることができるが、Aの状態からA’’に傾倒したり、A’’の状態からAに傾倒するほうが、隆起するようなよりはっきりとした刺激を指135に与えることが可能となる。
【0032】
傾倒部材102は板ばね109などの弾性を有する連結部材を備えているため、アクチュエータ104の駆動がないときや操作者の指135の圧力が無い場合は、図のA’の状態に戻ることができる。
【0033】
この動作はタッチパネル103の位置センシング動作と連動することが好ましい。タッチパネル103の位置センシング信号を取得することで、指135がタッチパネル103に触れているかどうかを判別することができる。
【0034】
指135が触れていると判別されたときに、電流源129に電流を通じ、アクチュエータ104を動作させることで、指135に刺激を与えるようにしてもよい。
【0035】
アクチュエータ104の駆動タイミングとしては、指135の圧下動作により、傾倒部材102がアクチュエータ104から離れるように動作している状態が好ましい。
【0036】
アクチュエータ104のコイル107に流す電流波形により、様々な触覚を実現することができる。
【0037】
例えば、コイル107に瞬間的に大きな電流を流すと、傾倒部材102は急激に、強く変位するため、指135に急激で、強い、隆起するような刺激を与えることができる。また、ON/OFFを繰り返すパルス状の電流をコイル107に流すと、アクチュエータの吸引力118は、断続的に強弱が変化する。アクチュエータの吸引力118は指135の力と逆向きのベクトルのため、傾倒部材102はy+、y−に振動する動作を行い、指135に小刻みに隆起を繰り返すような刺激を与えることができる。
【0038】
図6から図10に、傾倒部材102の変形例を示す。これら図6から図10の構成は、いずれも第2の連結部材106にのみ板ばねを用い、柱状部111と支持部材101とが連結される固定部112の構成を変形させた例である。
【0039】
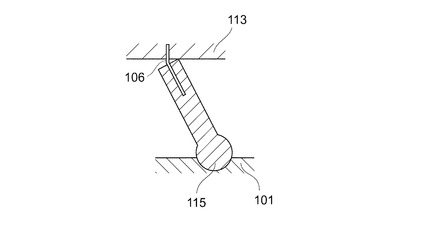
図6は傾倒部材102の一端に半円筒もしくは半球面形状の凸部を設けた構造であり、支持部材側に鉢状の凹部を設けている。この例のように半円筒もしくは半球面形状の凸部115と、鉢状の凹部116を設け、勘合する構成にすることで、より滑らかな円運動を実現することが可能になる。また、半円筒もしくは半球面形状の柱状部の端部と支持部材側の鉢状の凹部との間に、傾倒動作を滑らかにするためにグリースなどの潤滑材を注入してもよい。
【0040】
図7は、図6の例とは逆に柱状部側に鉢状の凹部を設け、支持部材側に凸部を設けた構造である。
【0041】
また、図8のように半円筒もしくは半球面形状を柱の直径よりも大きくしたり、小さくしてもよい。
【0042】
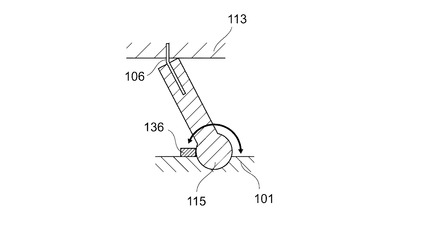
また、図9のように傾倒部材の傾倒角度を規制する樹脂片136などを置いてもよい。このようにすることで、タッチパネルが必要以上の力で押下されたとき、タッチパネル装置の損傷を防ぐことができる。
【0043】
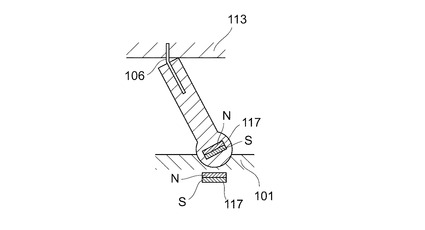
また、図10のように、第2の連結部材を板ばねとし、第1の連結部材を、支持部材101の凹部に設けた磁石117と傾倒部材102の凸部に設けた磁石117とで構成してもよい。このようにすることで、磁石117どうしの吸引力を利用することができるようになる。
【0044】
傾倒部材102が支持部材101に対して垂直になるときに、支持部材側の磁石117と傾倒部材側の磁石117との間の磁力が最大になるように構成すれば、アクチュエータが駆動していないときであっても、傾倒部材を自立させることが可能となる。尚、磁石は、フェライト系、ネオジウム系、サマリウム系などの硬磁性体を磁化した永久磁石でもよいし、電磁石でもよい。
【0045】
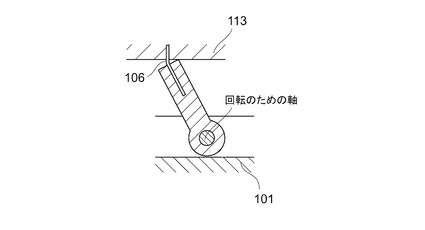
また、図11のように、支持部材面に対し垂直となる壁部に横軸を設け、この横軸に柱状部が回転できるように先端部を勘合させてもよい。
【0046】
また、図12のように、傾倒部材を低歪み材からなる軟磁性を有する柱状部111(磁性柱139)と高歪み材140との組み合わせとし、高歪み材140を第1および第2の連結部材としてもよい。低歪み材139は例えば、フェライト、鉄、珪素鋼板などの軟磁性体や軟磁性体を混合した、ポリカーボネートやアクリル、PET(ポリエチレンテレフタレート)などの樹脂が用いられ、特に柱の断面積が1mm2〜500mm2であることが好ましい。一方、柱の接触面を高歪み材140にて平板部113や支持部材101と接合している。この高歪み材140には、天然ゴム、イソプロピレン、ブタジエンゴム、ウレタンゴム、シリコンゴム、等の0.1GPa以下のエラストマーで構成することが好ましい。
【0047】
以上のとおり、本実施形態のタッチパネル装置によれば、操作者がタッチパネル103を押下した際、傾倒部材102は、連結部材105、106の連結部を支点として、自立した傾倒部材102が押下方向に傾倒し、同時にアクチュエータ104が動作する。このとき、傾倒部材102と平板部113を連結する板ばね109は、アクチュエータ104から離れるように傾倒する。一端はアクチュエータ104から離れる方向に傾倒した傾倒部材102は、軟磁性を帯びた板ばね109を有しているため、アクチュエータ104が生成する磁力114によって、自立する方向に引き戻される。タッチパネル103が押下されるたびに、傾倒部材102が傾倒する動きと、傾倒部材102を構成する板ばね109が引き戻される動きを繰り返すため、操作者は、タッチパネル103から隆起するような触覚を得ることができる。
【0048】
(第2実施形態)
アクチュエータを、前記傾倒部材が傾倒する方向に互いに対向するように前記タッチパネルの両側に配置してもよい。このようにすることで、対向するどちら側でも吸引力118を発生させることが出来るようになり、操作者は2方向から隆起するような触覚を得ることができる。
【0049】
たとえば、図13のように、タッチパネル103のy−方向に配置したアクチュエータ104に加え、タッチパネル103を挟みこむように、y+方向にもアクチュエータ104を配置してもよい。このように傾倒部材102が傾倒する方向に互いにアクチュエータ104を配置することで、y+方向にも動作させることが可能になる。
【0050】
この実施形態では、y−方向のアクチュエータ104aに電流源129aをスイッチ素子137aを介して接続し、y+方向のアクチュエータ104bに電流源129bをスイッチ素子137bを介して接続している。然るに、スイッチ素子137aを開放にしたまま、スイッチ素子137bを閉じると、y+方向に傾倒部材102が倒れ、逆にスイッチ素子137bを開放にしたまま、137aを閉じると、y−方向に傾倒部材102が倒れる。スイッチ素子137は、トランジスタ、リレー、などの電子制御できるもので実現できる。またスイッチ素子137は、コントローラ138により制御される。このようにすることで、y−,y+方向どちらでも傾倒部材102を傾けることが可能となり、フィードバックされる触覚のバリエーションが増える。
【0051】
また、例えば、前記アクチュエータは、前記タッチパネルの互いに直交する方向に複数配置し、前記傾倒部材は、前記アクチュエータが形成する磁路の方向に傾倒可能な磁性体柱を有する構成にしてもよい。このようにすることで、直交する方向に傾倒させることも可能となる。
【0052】
具体的には、図14のように傾倒方向が直交する方向、すなわちx軸方向にもアクチュエータ104を配置してよい。さらに、x軸方向に傾倒可能な傾倒部材102も配置することで、x−y平面どちらにも傾倒可能になる。この構成では、y−軸方向とx−軸方向にアクチュエータ104を配置している。傾倒部材102には図7の半球形状の凸凹をもつ構造が用いられている。これら傾倒部材102は磁性体柱124で構成される。また、傾倒部材102が接する平板部113も磁性体で構成し、平板部113にてアクチュエータ104側に磁束130を誘導している。x−軸側のアクチュエータ104aとy−軸側のアクチュエータ104bにはそれぞれにコイル107が巻かれており、コイル107にはコントローラ138からの制御できる電流源129がそれぞれ取り付けられている。そのため、x軸方向、y軸方向それぞれ直交する方向に磁気回路128が形成されている。
【0053】
図1や図13のようなy軸方向のみに傾倒する構成では、y軸方向のアスペクト比のみを高めればよいが、この構成においては、傾倒部材102はx方向にもアスペクト比を高めることが好ましい。このようにすることでx方向に動作するアクチュエータ104aの吸引力118aにより、傾倒することが可能となる。傾倒部材102を、図6から図10に示した構成で実現することが可能である。
【0054】
また、電流増幅器を用いて電流源129の電流値を制御してもよいし、パルス波にてスイッチ素子137を駆動するようにしてもよい。また、コントローラ138にはタッチパネル103からの信号を入力し、この入力信号を元に、スイッチ素子137a、スイッチ素子137bの制御を行うようにしてもよい。
【0055】
コントローラ138からの指令により、電流源129aと電流源129bに発生させる電流によって、アクチュエータ104aとアクチュエータ104bの吸引力118が変化する。電流源129aのみに電流を流せば、アクチュエータ104aのみにx軸方向の吸引力118aが発生し、電流源129bのみに電流を流せば、アクチュエータ104bのみにy軸方向の吸引力118bが発生する。同時に電流を流せば、それぞれの吸引力118のベクトルの和の方向、すなわち、x軸とy軸の斜め方向に傾倒させることが出来る。すなわち、タッチパネル103の可動方向が増え、様々な方向から反力を指135に返すことができるようになる。
【0056】
(第3実施形態)
本実施形態では、傾倒部材102の傾倒角度120を検出する手段を備えている。傾倒角度120を検出することで、角度情報を制御コントローラ138へフィードバックすることが可能となり、操作者には傾倒角度に応じて異なる大きさの触覚がフィードバックされる。
【0057】
検出手段の例として図15に静電容量センサ141の模式図を示す。支持部材101側に電極142aと電極142cが取り付けられ、タッチパネル103側に電極142bが取り付けられている。図では省略しているが、y−およびy+側には本発明のアクチュエータ104が構成されている。ここで各電極の位置関係は、傾倒部材がy−方向に倒れこむ場合、電極142aと電極142bが接近し、傾倒部材がy+方向に倒れこむ場合、電極142bと電極142cが接近するようになっている。
【0058】
電極142aと電極142b間の静電容量Cは、電極142aと電極142bの対向部の面積に依存する静電容量C1と電極のエッジ部に構成される静電容量C2の和(C=C1+C2)で示される。C1は、電極142の奥行きをw、誘電率をε、対向面積をS、オーバーラップ距離k1、とすると、C1=εS/d=ε・w・k1/dで示される。y−方向に傾倒部材102が倒れると、タッチパネル103も弧を描きながら、移動するため、電極142aと電極142bが接近する。このとき、電極のz軸の距離dが小さくなるだけでなく、オーバーラップ距離k1が増加することになるので、k1/dが増加し、C1が増加する。C2は定式化することが困難であるが同様に電極間が近づくことで増加する。そのため、電極142aと電極142bの間が近づくことで静電容量Cは増加する。逆に、電極142bと電極142cの静電容量は、y+方向に傾倒部材102が倒れこむほど増加する。したがって、端子143aと端子143b間の静電容量を検出すれば、y−方向に傾倒したかどうかが確認でき、端子143bと端子143c間の静電容量を検出すれば、y+方向に傾倒したかどうかが確認できる。また、あらかじめ傾倒角度120と容量値の関係を測定しておけば、静電容量値の変化を検出することで傾倒角度120が推測可能であり、傾倒角度120をセンシングできる。
【0059】
上記例では、単純な平面的な電極142で構成したが、電極142の形をジグザグにするなどして対向面積を増やすなどの構成にしてもよい。対向面積が増加することで静電容量Cの変化量が増加し、センサの感度が向上する。また、電極142a、電極142cの代わりにホールセンサやMR(Magneto−resistive)素子、MI(Magneto−impedance)素子、GMR(Giant megneto−resistance)素子などの磁界を検出できるセンサ素子を配置し、電極142bの代わりに磁石、あるいは磁界発生のためのコイルを配置して、磁気的に傾きを検出してもよい。接近するほどセンサに働く磁界が強くなるので、センシングした磁界の強さから傾きの程度を得ることができる。
【0060】
図16は、傾倒角度120を検出するためのセンサ141を備えた触覚デバイスの機能ブロック図である。センサ141の情報は検出回路146を通じてマイクロコントローラ144に入力される。同様にタッチパネル103の入力もマイクロコントローラ144に入力される。すなわち、マイクロコントローラ144には傾倒部材102の傾倒角度θ120とタッチパネル103のタッチ位置の情報(x、y)が入力される。アクチュエータ104は、駆動回路147を通じてマイクロコントローラ144からの制御が可能となっており、タッチパネル103と角度センサ141両方の入力に応じて様々な場面で触覚を作り出すことが可能となる。以下にソフトウェアと連携した二つの応用例を示す。
【0061】
一つ目の例では、アクチュエータ104の駆動を行うかどうかの判別に角度センサ141の値を応用する。この例のフローチャートを図17に示す。以下順にフローチャートを説明する。
【0062】
まず、S1およびS2のフローにて触覚発生領域のエリア座標情報と、傾倒角度の閾値θ‘の二つの駆動条件が設定され、メモリに格納される。
【0063】
続いて、S3では、タッチパネル103の位置情報(x、y)の値を取得する。その後のS4では、タッチパネル103から取得した位置情報(x、y)の値が触覚発生領域に入っているかを比較する。この領域に入っている場合には、後段のフローS5に移動し、逆に入っていなければ、前段のフローS1に移動する。
【0064】
S5では、傾倒角度センサ141の値θを取得する。非タッチ時には、指圧が加わっていないため|θ|はほぼゼロである。強くタッチし、指圧が加わることで|θ|の値は大きくなる。
【0065】
S6では、傾倒角度センサの値θと傾倒角度の閾値θ‘を比較する。指圧が加わっていない場合には、センサの値が閾値を越えることがない。すなわち、|θ’|>|θ|の関係が成り立つ。同様に指圧が弱い場合にもやはり、|θ’|>|θ|の関係が成り立つ。これら場合には、前段のフローS1へ移動させる。一方、指圧が強い場合には、センサの値が閾値を超えることになるので、|θ|≧|θ’|の関係が成り立つ。このときには後段のフローS7に移動するように設定する。
【0066】
S7にフローが移動すると、アクチュエータ104のコイルに電流を流し、傾倒部材102を反転し、指135に触覚を与える。操作者は強く押さえた後、逆向きの回転の触覚を得るので、押したことを強く確認できる。この応用は、ソフトウェア上のファイルやプログラムの削除の確認など、特に重要な場面での使用に適している。
【0067】
上記で説明した、フローチャートは、本デバイスの駆動タイミングのみのフローチャートであって、本フローチャートを関数化し、これと並列および従属するプログラム内に組み込まれていてもよい。また本説明では傾倒角度の比較に絶対値を用いたが、+、−などの符号つきで比較してもよい。
【0068】
図18のように、タッチパネル103上に各エリアを設定し、傾倒角度120を変えることによって、z方向の高さを領域毎に随時変更し、操作者により立体的な触覚フィードバックすることも可能である。
【0069】
図19は、傾倒部材あるいはパネルのz方向に関する制御目標を示したグラフである。このグラフの内部の図は傾倒部材の傾きを模式化したものである。また、簡略に説明するために図では各エリアを実線で示したが、実際には、タッチパネル上の座標を基準に、ソフト的に設定するエリアであり、ソフト的な操作のみでエリアや制御目標の変更が可能である。この動作例では、第1エリア145aを、傾倒角度θを0rad(傾倒していない状態)とし、第3エリア145cの傾倒角度θを−π/3radとしている。第2エリア145bは、第1エリア145aと第3エリア145cを連続的に繋ぐように設けられたエリアである。
【0070】
情報表示部110に連動した、タッチパネル103に操作者が触れると、そのエリアに応じた制御目標まで、アクチュエータ104を駆動させて、傾倒部材102を傾ける。その後タッチパネル103から指135を離せば、傾倒角度θは0の位置まで戻るが、操作者がそのまま指135でタッチパネル103を押しているとき、タッチパネル103には指圧が加わることになる。指圧は一定値ではないので、制御していなければ指圧に応じて傾倒角度θが変化してしまう。そこで、センサ141で傾きを測定し、リアルタイムの傾き情報をマイクロコントローラ144へ送る。マイクロコントローラ144は制御目標とリアルタイムの傾き情報から差を計算し、必要な力118を発生させるようにアクチュエータ104を駆動し、傾きを維持させる。このフィードバックの応答が速ければ、操作者は頑なな触覚を得る。一方、フィードバックの応答が遅ければ、より弾性的な触覚を得る。
【0071】
図20から図23は、動作を説明するための概略図である。この例では、操作者が第1エリア145aから第2エリア145bを経由して、第3エリア145cをまでを指135を滑らせるとする。図21は第1エリア145a内での動きを示している。このエリアの制御目標は傾きが0°であるので、指135から摩擦によって伝わってくる力に抗うように、アクチュエータ104からは、逆向きの力を発生させる。次に第2エリア145bの場合、指135の力よりもアクチュエータ104の逆向きの力を弱くしていく(図21)。さらに、傾倒部材102のばね性の反発力を考慮して右端に近くなるにつれ指135の力と同じ向きにアクチュエータ104の力を発生させる(図22)。最後に、第3エリア145cにおいては、同じ傾きを続けさせるために、指135からの力と同一の方向にアクチュエータ104の力を与える(図23)。
【0072】
図20から図23の動作において、第1エリア145a、第3エリア145cを通過するときには、指135は平面を滑る感覚を得ることができる。また第2エリア145bを通過するこきには、指135は斜面を滑る感覚を得ることができる。
【0073】
この例では、指135を滑らせたときに斜面の触覚を得るため、第2エリア135bのような第1エリア135aと第2エリア135cを線形的に繋ぐエリアを設定したが、第1エリア135aのようなz軸上の最も高いところから、急に第3エリア135cのような低いところへ変位してもよい。このように急激な変化を作ることで、操作者は凸凹を感じることなる。エリア135や傾倒角度120は、ソフト的な操作により変更可能なため、必要に応じて斜面や凸凹を作り出すことができる。
【0074】
また、この動作を行う間、傾倒角度120に応じてタッチパネル座標はディスプレイ表示に若干のずれが生じる。タッチパネル上のずれは、傾倒角度をθ、柱の長さをbとすると、b×sinθで示される。すなわちbが大きく、傾倒角度θが大きいほどタッチパネル座標がずれることになるが、傾倒部材102の角度情報はセンサ141によりマイクロコントローラ144に入力されているので、この情報を基にマイクロコントローラ144内でディスプレイ表示に合うように座標補正を行ってもよい。
【0075】
また、本例では、一つの平面的なタッチパネル上に三つのエリアを設定したが、タッチパネルを複数用意して、パネルごとにエリアを割り当ててもよい。
【0076】
また、加速度センサを設けてもよい。加速度センサの値より重力方向を検出し、重力方向の角度と傾倒部材102の傾きθを比較し、差分を計算し、アクチュエータ104出力を調整することで重力による角度補正を行ってもよい。
【符号の説明】
【0077】
100 タッチパネル装置、101 支持部材、102 傾倒部材、103 タッチパネル、104 アクチュエータ、105 第1の連結部材、106 第2の連結部材、
107 コイル、108 発生磁界、109 板ばね、110 情報表示部、111 柱状部、112 固定部、113 平板部、114 磁力、115 すり鉢状の凸部、116 半球、半円状の凹部、117 磁石、118 吸引力、119 角度検出センサ、120 傾倒角度、121 携帯機器、122 エラストマー、123 連結部材、124 磁性体柱、125 磁心、126 ヨーク、127 ボビン、128 磁気回路、129 電流源、130 磁束、131 可動部、132 支点部、133 リセット用コイル、134 非磁性体柱、135 指、136 樹脂片、137 スイッチ素子、138 コントローラ、139 低歪み材、140 高歪み材、141 検出センサ、142 電極、143 端子、144 マイクロコントローラ、145a 第1エリア、145b 第2エリア、145c 第3エリア、146 検出回路、147 駆動回路
【特許請求の範囲】
【請求項1】
支持部材と、
前記支持部材上に設けられた傾倒部材と、
前記傾倒部材上に載置されたタッチパネルと、
前記傾倒部材の傾倒方向に磁路を形成するアクチュエータと、を備え、
前記傾倒部材は、前記支持部材に連結される第1の連結部材と、前記タッチパネルに連結される第2の連結部材とを、有しており、
前記アクチュエータに近接した前記傾倒部材は、軟磁性材料を含むことを特徴とするタッチパネル装置。
【請求項2】
前記第1の連結部材もしくは前記第2の連結部材の少なくともいずれか一方が、板ばねであることを特徴とする請求項1に記載されたタッチパネル装置。
【請求項3】
前記第1の連結部材もしくは前記第2の連結部材の少なくともいずれか一方が、磁石であることを特徴とする請求項1に記載されたタッチパネル装置。
【請求項4】
前記第1の連結部材もしくは前記第2の連結部材の少なくともいずれか一方が、エラストマーであることを特徴とする請求項1に記載されたタッチパネル装置。
【請求項5】
前記アクチュエータは、前記傾倒部材が傾倒する方向に複数配置されていることを特徴とする請求項1から4のいずれか1項に記載されたタッチパネル装置。
【請求項6】
前記傾倒部材の傾倒角度を測定するセンサを設けたことを特徴とする請求項1から5のいずれか1項に記載されたタッチパネル装置。
【請求項1】
支持部材と、
前記支持部材上に設けられた傾倒部材と、
前記傾倒部材上に載置されたタッチパネルと、
前記傾倒部材の傾倒方向に磁路を形成するアクチュエータと、を備え、
前記傾倒部材は、前記支持部材に連結される第1の連結部材と、前記タッチパネルに連結される第2の連結部材とを、有しており、
前記アクチュエータに近接した前記傾倒部材は、軟磁性材料を含むことを特徴とするタッチパネル装置。
【請求項2】
前記第1の連結部材もしくは前記第2の連結部材の少なくともいずれか一方が、板ばねであることを特徴とする請求項1に記載されたタッチパネル装置。
【請求項3】
前記第1の連結部材もしくは前記第2の連結部材の少なくともいずれか一方が、磁石であることを特徴とする請求項1に記載されたタッチパネル装置。
【請求項4】
前記第1の連結部材もしくは前記第2の連結部材の少なくともいずれか一方が、エラストマーであることを特徴とする請求項1に記載されたタッチパネル装置。
【請求項5】
前記アクチュエータは、前記傾倒部材が傾倒する方向に複数配置されていることを特徴とする請求項1から4のいずれか1項に記載されたタッチパネル装置。
【請求項6】
前記傾倒部材の傾倒角度を測定するセンサを設けたことを特徴とする請求項1から5のいずれか1項に記載されたタッチパネル装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】

【図15】
【図16】
【図17】

【図18】
【図19】
【図20】
【図21】
【図22】

【図23】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【公開番号】特開2013−105192(P2013−105192A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2011−246317(P2011−246317)
【出願日】平成23年11月10日(2011.11.10)
【出願人】(000003067)TDK株式会社 (7,238)
【Fターム(参考)】
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年11月10日(2011.11.10)
【出願人】(000003067)TDK株式会社 (7,238)
【Fターム(参考)】
[ Back to top ]