
ターゲット位置特定のためのシステムおよび方法
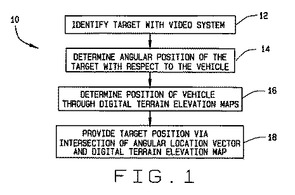
ビークル(102)からターゲット位置を決定する方法が説明される。この方法は、ビデオシステム(124)を使用してターゲット(100)を識別するステップ(12)、ビークルに関するターゲットに対する角度位置ベクトル(104)を決定するステップ(14)、デジタル地勢高度図(122)および精密レーダ高度計(30)を使用してビークルの位置(108)を決定するステップ(16)、角度位置ベクトルがデジタル地勢高度図と交差する位置を計算するステップ、およびビークル位置ならびに角度位置ベクトルとデジタル地勢高度図との交点の位置に基づいてターゲット位置(112)を生成するステップ(18)を含む。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、一般にはターゲットの位置に関し、より詳細には、地勢特徴座標位置能力を有するレーダ高度計を使用してターゲット位置を突き止めることに関する。
【背景技術】
【0002】
緯度、経度、および垂直基準(例えば高度)で表したターゲット位置は、すべてのタイプのターゲティングプロセスに関して使用される。現在使用されているターゲット位置特定方法は、例えば視覚ターゲット位置特定装置またはGPSロケータを使用する人員を含む。視覚位置決め装置でターゲットの位置を突き止めるために人員を使用することは危険であり、往々にして、地勢の起伏のために極めて困難である。さらに、ターゲット位置の精度は、ターゲット位置特定を実施する人員の能力および技能に大きく依存する。衛星航法システム(GPS)位置特定装置は極めて妨害の影響を受けやすい。
【0003】
レーダ高度計はGPS装置ほど容易には妨害されない。1つの既知の精密レーダ高度計は、地上を一連のナロー・ドップラ・スワスで「観察」し、ドップラ帯域フィルタを使用して、一度に1つのスワスに焦点を当てる。エコー信号が2つ以上のアンテナによって受信される。2つのアンテナによって受信され、特定のドップラ帯域フィルタを通過したエコー信号の位相比較を実施することにより、特定のスワス内の最高ポイントの位置が求められる。レーダによって照射されている最高ポイントがエアビークルの真下である場合、エコー信号が両方のアンテナによって同時に受信される。一方、最高ポイントがエアビークルの一方の側から離れている場合、エコー信号は、2番目のアンテナによって受信される前に1番目のアンテナによって受信される。2番目のアンテナまでの戻り経路が1番目のアンテナまでの戻り経路よりも長いからである。
【0004】
各アンテナでのエコー信号の到来位相または到来時間が比較される。上述のレーダ高度計は、所与のエリアまたは地勢についての記憶された緯度、経度、および高度データを提供するデジタル地勢高度図と共に使用することができる。
【発明の開示】
【課題を解決するための手段】
【0005】
一態様では、ビークルからターゲット位置を決定する方法が提供される。この方法は、ビデオシステムを使用してターゲットを識別するステップ、ビークルに関するターゲットに対する角度位置ベクトルを決定するステップ、および精密レーダ高度計でデジタル地勢高度図上のビークルの位置を決定するステップを含む。角度位置ベクトルがデジタル地勢高度図と交差する位置が計算され、ビークル位置ならびに角度位置ベクトルとデジタル地勢高度図との交点の位置に基づいてターゲット位置が生成される。
【0006】
別の態様では、ビークルで使用するためのターゲット位置特定システムが提供される。このシステムは、レーダ高度計とビデオシステムの両方に通信可能に結合された遠隔測定送信機/受信機を備える。ビデオシステムは、ターゲットを識別し、ターゲットの角度位置を遠隔測定送信機/受信機に与える。レーダ高度計は、デジタル地勢高度図を使用してビークルの位置を求め、ビークルの位置を遠隔測定送信機/受信機に与える。ターゲット位置特定システムは、角度位置ベクトル、ビークル位置、およびターゲット付近のデジタル地勢高度図を使用してターゲットの位置を決定する。
【発明を実施するための最良の形態】
【0007】
図1は、ビークルに対するターゲット位置を決定する一方法を示すフローチャート10である。この方法は、ビデオシステムを使用してターゲットを識別するステップ12、ビークルに関するターゲットに対する角度位置ベクトルを決定するステップ14、デジタル地勢高度図上のビークルの位置を決定するステップ16、および角度位置ベクトルをデジタル地勢高度図データと交差させることによってターゲット位置を与えるステップ18を含む。一実施形態では、ビークルの位置を決定するステップ16は、ビークルの緯度、経度、および高度を決定するステップを含む。別の実施形態では、ビークルの位置を決定するステップ16は、レーダ高度計を使用するステップを含み、レーダ高度計は、デジタル地勢高度図と共に働いてビークル位置を決定する。
【0008】
以下で述べるように、レーダ高度計は、ビークル機体座標における角度位置ベクトルを受け取り、ターゲットの位置をターゲットのローカル座標、例えばターゲットの緯度、経度、および高度に変換する。
【0009】
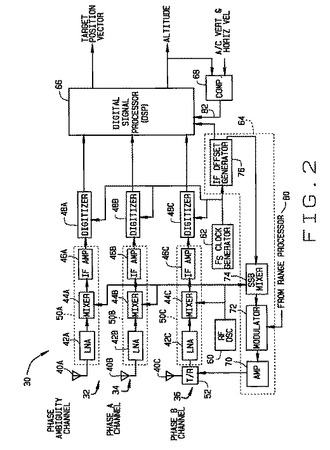
図2は、レーダ高度計30のブロック図である。好ましい実施形態では、レーダ高度計30はエアビークルに組み込まれる。レーダ高度計30は、位相アンビギュイティチャネル32、位相Aチャネル34、および位相Bチャネル36の3つのチャネルを含む。チャネル32は、アンテナ40A、低ノイズ増幅器(LNA)42A、ミキサ44A、中間周波数(IF)増幅器46A、およびデジタイザ48Aを含む。低ノイズ増幅器(LNA)42A、ミキサ44A、中間周波数(IF)増幅器46Aが受信機50Aを形成する。チャネル34は、アンテナ40B、LNA42B、ミキサ44B、IF増幅器46B、およびデジタイザ48Bを含む。LNA42B、ミキサ44B、およびIF増幅器46Bは受信機50Bを形成する。チャネル36は、アンテナ40C、送信/受信スイッチ52、LNA42C、ミキサ44C、IF増幅器46C、およびデジタイザ48Cを含む。LNA42C、ミキサ44C、およびIF増幅器46Cは受信機50Cを形成する。チャネル36中の送信/受信スイッチ52は、チャネル36アンテナ40Cが送信モードまたは受信モードで動作することを可能にする。
【0010】
レーダ高度計30は、RF発振器60、クロックジェネレータ62、送信機64、デジタル信号プロセッサ(DSP)66、およびコンピュータ68をさらに含む。送信機64は、電力増幅器70、変調器72、単側波帯(SSB)ミキサ74、および中間周波数(IF)オフセットジェネレータ76を含む。RF発振器60は、ミキサ44A〜44CおよびSSBミキサ74に結合される。クロックジェネレータ62は、デジタイザ48A〜48CおよびIFオフセットジェネレータ76に結合される。
【0011】
レーダ高度計30は、アンテナパターンによって境界が画された、例えば10フィート幅ダウントラックスワス内で、エアビークルの下の最高の対象物までのクロストラックおよび垂直距離を与える。本明細書で使用される「ダウントラック」という用語は移動方向を意味し、本明細書で使用される「クロストラック」という用語は移動方向に対する垂直を意味する。他のアンテナパターンおよびスワス特性を使用することもできる。
【0012】
レーダ高度計30は、レーダ信号を地上に向けて送信するのに使用される。レーダ信号を生成するために、クロックジェネレータ62が、IFオフセットジェネレータ76に例えば120MHzのクロック信号を供給する。IFオフセットジェネレータ76は、レーダ伝送信号のためのオフセット信号を生成する。この例を続けると、オフセットジェネレータ76は、クロックジェネレータ62からの入力クロック信号を4で割り、30MHzのクロック信号を出力する。SSBミキサ74は、IFオフセットジェネレータ76からの30MHzクロック信号をRF発振器60からのRF信号と混合し、その結果RF信号の30MHzオフセットが得られる。SSBミキサ74は、オフセット信号を変調器72に出力する。この例では、RF発振器20は約4.3GHzで動作する。変調器72は、レンジプロセッサ80から送信コードデータを受け取り、SSBミキサ74から受け取った信号をパルス変調および位相変調し、変調後信号を電力増幅器70に出力する。電力増幅器70は、受け取った信号を増幅し、増幅後信号を送信/受信スイッチ52を介してアンテナ40Cに出力する。アンテナ40Cは、変調後信号を地上に向けて送信する。一例として、送信機64は、12ミリ秒の間隔内に約600個のパルスを約20マイクロ秒のパルス間隔で送信する。他の周波数およびパルス分離を使用することもできる。
【0013】
レーダ信号がチャネル36によって送信された後、地上から反射された信号がアンテナ40A〜40Cによって受信され、各チャネル32、34、および36の構成要素によって処理される。チャネル36内のLNA42C、ミキサ44C、IF増幅器46C、およびデジタイザ48Cは、チャネル32および34内の対応する構成要素と同一であり、したがって各チャネル32、34、および36は、他のチャネルと同じ機能を果たす。したがって、チャネル32および34が信号を受信および処理する際に同様に動作するという理解と共に、チャネル36に関連して各機能を説明する。
【0014】
アンテナ40Cによって受信されたエコー信号は、送信/受信スイッチ52を通過し、LNA42Cによって増幅される。ミキサ44Cは、増幅されたエコー信号を、RF発振器60によって出力されたRF発振器信号と混合し、IFオフセット信号をIF増幅器46Cに出力する。IFオフセット信号はIF増幅器46Cによって増幅され、デジタイザ48Cに出力される。デジタイザ48Cは、受け取った信号をデジタル化し、デジタル化信号をDSP66に出力する。クロックジェネレータ62の周波数により、チャネル32、34、および36上の着信アナログ信号がデジタイザ48A〜48Cによってサンプリングおよびデジタル化されるレートが決定される。
【0015】
コンピュータ68は、エアビークルまたは航空機(A/C)の垂直および水平速度データをエアビークルの慣性航法システム(INS)(図示せず)から受け取る。コンピュータ68は、速度データを処理し、ドップラ・スワス・フィルタ制御信号を制御線82上でDSP66に出力する。DSP66は、地上の特定の領域または「スワス」内の最高ポイントの位置を特定するターゲット位置ベクトルを出力し、ビークルの高度を特定するabove ground level(AGL)高度データも出力する。
【0016】
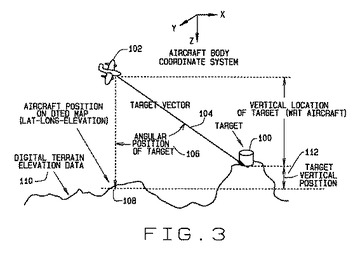
図3に、ビークル102からのターゲット100の位置を示す。一実施形態では、ターゲット100はビークル102内のビデオシステム(図4に図示)によって識別され、ビデオシステムの方位照準角および仰角に基づいて、ターゲットベクトル104が生成される。ターゲットベクトル104に基づいて、ターゲット100の角度位置106が、ビークル102に関してビークル機体座標として求められる。ターゲットベクトル104を受け取るレーダ高度計30(図2に図示)は、ビークル機体座標をビークル102の飛行線に基づく座標に変換する。飛行線に基づく座標はローカル座標またはドップラ座標と呼ばれることもあり、それを図5および図6に関連して以下で説明する。次いでレーダ高度計30は、ビークル102に格納されたデジタル地勢高度図データ110に基づいて、ビークル位置108を一実施形態では緯度、経度、および高度として決定する。ビークル位置108に基づいて、(ドップラ座標に変換された)ビークル機体座標でのターゲット100の位置、およびターゲット100付近のデジタル地勢高度図データに基づいて、緯度、経度、および高度112でのターゲット100の実際の座標が求められる。
【0017】
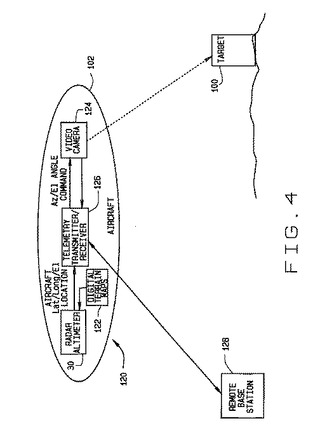
図4は、上述のターゲット位置特定方法を実現するハイブリッドビデオ/レーダ高度計システム120を示すブロック図である。システム120は、デジタル地勢高度図データ122を受け取るレーダ高度計30(図2にも図示)を含む。ビデオシステム124は、ターゲット100を識別するのに使用される。システム120は、レーダ高度計30、ビデオシステム124、および遠隔基地局128からデータを受け取る遠隔測定送信機/受信機126をさらに含む。一実施形態では、レーダ高度計30は、精密地勢支援ナビゲーション(PTAN)レーダシステムである。ハイブリッドシステム120は、ビークル102、例えば有人または無人航空機上に設置される。ターゲット100はビデオシステム124によって識別され、ターゲット100の角度位置が、遠隔基地局128により、遠隔測定送信機/受信機126から受信されたデータと、デジタル地勢高度122と同様の遠隔基地局128に格納されたデジタル地勢高度図とから、ビークル102に対して求められる。
【0018】
レーダ高度計30は、精密デジタル地勢高度図122からのデータの取込みに基づいて、例えば緯度、経度、および高度によって記述されたビークル102の位置を決定する。緯度、経度、および高度でのビークル102の位置、遠隔測定送信機/受信機126によって与えられる航空機に対するターゲット100の角度位置、ならびにターゲット100付近の地勢高度データにより、システム120が緯度、経度、および高度でのターゲット100の位置を決定することが可能となる。
【0019】
具体的には、一実施形態において、ビデオターゲット認識システムとも呼ばれるビデオシステム124がターゲット100を識別する。精密角度位置、ビークル機体座標での3次元位置が、ビデオシステム124の一部であるカメラの方向に基づいて求められる。ビークル102の飛行線は通常はビークル機体座標と整合しないので、次いで、機体座標での測定されたターゲットベクトル角度(角度位置)がローカル(ドップラ)座標に基づくベクトルに変換される。レーダ高度計30は、精密デジタル地勢高度図122上のビークル102の位置を決定する。ローカル座標でのターゲットベクトルと精密デジタル地勢高度図122上のターゲット100付近の地勢との交点により、ターゲット100の緯度、経度、および高度座標を決定することが可能となる。
【0020】
一実施形態では、遠隔測定送信機/受信機126は、航空機102(例えば無人機)と遠隔基地局128との間の通信リンクである。この実施形態では、航空機102が飛行経路に沿って飛行するとき、ターゲット100を取得するためにビデオシステム124が使用される。遠隔基地局128のオペレータは、ビデオシステム124の視野(FOV)を制御することができる。可能な注目点(例えばターゲット100)を見る際に、オペレータはズームインし、(遠隔測定送信機/受信機126を介して)ビデオシステム124の照準方位角および仰角を調節し、取得したターゲット100を、狭まったビデオシステム124のFOV内に保ち、制御された角度を実現する。制御された角度は、航空機102に対するターゲット100の位置を与える角度を含む。
【0021】
この取得期間の間、レーダ高度計30も、遠隔測定送信機/受信機126を使用する遠隔基地局128へのデジタル地勢高度図122に基づいて航空機102の位置を提供している。遠隔基地局128は、基地局128自体のデジタル地勢高度図を使用して航空機102の位置を突き止める。遠隔基地局128も遠隔測定送信機/受信機126からビデオシステム124の照準角を受信しているので、基地局128は、ターゲット100の緯度、経度、および高度の幾何学的に突き止めるのに必要なすべてのデータを格納している。
【0022】
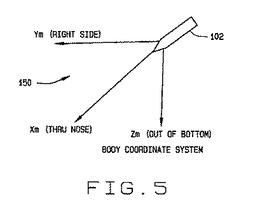
図5および図6は、ビークル機体座標でのターゲット100の角度位置からローカル(ドップラ)座標ベクトルへの変換を示す。図5は機体座標系150を示す。機体座標系は、ビークル102のボディに対する座標系である。x軸Xmは、ビークル102のボディのノーズを通る軸である。y軸Ymは、Xmから90度である軸であり、ビークル102のボディの右側に対して正である。z軸Zmは、XmとYmの両方から90度である軸であり、ビークル102のボディの底部に対して垂直である。ビークル操縦に関して、正のロールは右翼の降下であり、正のピッチはノーズアップであり、正のヨーはノーズから右の向きである(すべて飛行線に対して)。
【0023】
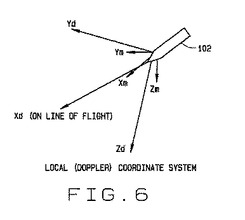
エアビークル、例えばビークル102は通常、その機体座標と整合して飛行しないことが知られている。そのような飛行経路は飛行線と呼ばれることがある。したがって、ピッチ、ロール、またはヨーのうちの1つまたは複数で飛行中であり、ハードマウントされたレーダシステム、例えば(図2に示す)レーダ高度計30を有する航空機は、機体座標でターゲット位置を決定する際に誤差要素を導入する。そのようなレーダは通常は飛行線に対して動作するので、飛行線に関する座標系が開発され、その座標系はローカル座標またはドップラ座標系と呼ばれることがある。図6に、ビークル機体座標とローカル座標との差を示す。ローカル座標系のx軸Xdはビークルの飛行線上にある。Xdに直角なy軸Ydおよびz軸Zdがそれぞれ、Xdを横切り、Xdの上および下にあるものとして定義される。
【0024】
したがって、ビークル102がピッチ、ロール、またはヨーなしで飛行中の場合、機体座標系はローカル座標系と整合する。正のロールでは、XmおよびXdは依然として整合されるが、YdはYmの下に回転し、ZdはZmの左側に回転する。正のヨーでは、XdはXmの右側に回転し、YdはYmの後方に回転し、ZdおよびZmが整合する。正のピッチでは、XdはXmの上に回転し、YdはYmと整合し、ZdはZmの前方に回転する。
【0025】
ピッチ、ロール、およびヨーのうちの複数を有することの効果、ならびにビークル機体座標でのターゲット位置の決定は明らかである。上述のシステムおよび方法は、実際のビークルの位置およびビークルの飛行線に基づくターゲット位置特定機能を提供する。ビークルの飛行線と整合しないビークルを有することによって生成される誤差を除去する、緯度、経度、および高度での実際のターゲット位置の決定。そのような位置決定は、やはり明らかである利点を有する。機体座標とローカル座標との間の関係がほぼ確実に常に変化する関係であり、一方、ターゲット緯度位置、経度位置、および高度位置は通常は一定であるからである。ターゲットの緯度位置、経度位置、および高度位置を有することにより、ターゲットに関係する任意のタイプの動作(すなわちミサイル攻撃、着陸、ターゲット内容の識別)が企図されるときにより高い確実性が得られる。
【0026】
さらに、ターゲットの位置を与えるのにGPSシステムは不要である。レーダ高度計30とビデオシステム124の組合せは、遠隔測定送信機/受信機126と遠隔基地局128の通信リンクと一緒に、上述のように妨害の影響を受けやすいGPSシステムへの依存を低減または解消する。
【0027】
本発明を様々な特定の実施形態によって説明したが、特許請求の範囲の精神および範囲内の修正形態で本発明を実施できることを当業者は理解されよう。
【図面の簡単な説明】
【0028】
【図1】ターゲット位置を決定する一方法を示すフローチャートである。
【図2】レーダ高度計のブロック図である。
【図3】ビークルからのターゲット位置を示す図である。
【図4】ビデオシステムおよびレーダ高度計を示すブロック図である。
【図5】機体座標系を示す図である。
【図6】機体座標系に対するローカル座標系を示す図である。
【技術分野】
【0001】
本発明は、一般にはターゲットの位置に関し、より詳細には、地勢特徴座標位置能力を有するレーダ高度計を使用してターゲット位置を突き止めることに関する。
【背景技術】
【0002】
緯度、経度、および垂直基準(例えば高度)で表したターゲット位置は、すべてのタイプのターゲティングプロセスに関して使用される。現在使用されているターゲット位置特定方法は、例えば視覚ターゲット位置特定装置またはGPSロケータを使用する人員を含む。視覚位置決め装置でターゲットの位置を突き止めるために人員を使用することは危険であり、往々にして、地勢の起伏のために極めて困難である。さらに、ターゲット位置の精度は、ターゲット位置特定を実施する人員の能力および技能に大きく依存する。衛星航法システム(GPS)位置特定装置は極めて妨害の影響を受けやすい。
【0003】
レーダ高度計はGPS装置ほど容易には妨害されない。1つの既知の精密レーダ高度計は、地上を一連のナロー・ドップラ・スワスで「観察」し、ドップラ帯域フィルタを使用して、一度に1つのスワスに焦点を当てる。エコー信号が2つ以上のアンテナによって受信される。2つのアンテナによって受信され、特定のドップラ帯域フィルタを通過したエコー信号の位相比較を実施することにより、特定のスワス内の最高ポイントの位置が求められる。レーダによって照射されている最高ポイントがエアビークルの真下である場合、エコー信号が両方のアンテナによって同時に受信される。一方、最高ポイントがエアビークルの一方の側から離れている場合、エコー信号は、2番目のアンテナによって受信される前に1番目のアンテナによって受信される。2番目のアンテナまでの戻り経路が1番目のアンテナまでの戻り経路よりも長いからである。
【0004】
各アンテナでのエコー信号の到来位相または到来時間が比較される。上述のレーダ高度計は、所与のエリアまたは地勢についての記憶された緯度、経度、および高度データを提供するデジタル地勢高度図と共に使用することができる。
【発明の開示】
【課題を解決するための手段】
【0005】
一態様では、ビークルからターゲット位置を決定する方法が提供される。この方法は、ビデオシステムを使用してターゲットを識別するステップ、ビークルに関するターゲットに対する角度位置ベクトルを決定するステップ、および精密レーダ高度計でデジタル地勢高度図上のビークルの位置を決定するステップを含む。角度位置ベクトルがデジタル地勢高度図と交差する位置が計算され、ビークル位置ならびに角度位置ベクトルとデジタル地勢高度図との交点の位置に基づいてターゲット位置が生成される。
【0006】
別の態様では、ビークルで使用するためのターゲット位置特定システムが提供される。このシステムは、レーダ高度計とビデオシステムの両方に通信可能に結合された遠隔測定送信機/受信機を備える。ビデオシステムは、ターゲットを識別し、ターゲットの角度位置を遠隔測定送信機/受信機に与える。レーダ高度計は、デジタル地勢高度図を使用してビークルの位置を求め、ビークルの位置を遠隔測定送信機/受信機に与える。ターゲット位置特定システムは、角度位置ベクトル、ビークル位置、およびターゲット付近のデジタル地勢高度図を使用してターゲットの位置を決定する。
【発明を実施するための最良の形態】
【0007】
図1は、ビークルに対するターゲット位置を決定する一方法を示すフローチャート10である。この方法は、ビデオシステムを使用してターゲットを識別するステップ12、ビークルに関するターゲットに対する角度位置ベクトルを決定するステップ14、デジタル地勢高度図上のビークルの位置を決定するステップ16、および角度位置ベクトルをデジタル地勢高度図データと交差させることによってターゲット位置を与えるステップ18を含む。一実施形態では、ビークルの位置を決定するステップ16は、ビークルの緯度、経度、および高度を決定するステップを含む。別の実施形態では、ビークルの位置を決定するステップ16は、レーダ高度計を使用するステップを含み、レーダ高度計は、デジタル地勢高度図と共に働いてビークル位置を決定する。
【0008】
以下で述べるように、レーダ高度計は、ビークル機体座標における角度位置ベクトルを受け取り、ターゲットの位置をターゲットのローカル座標、例えばターゲットの緯度、経度、および高度に変換する。
【0009】
図2は、レーダ高度計30のブロック図である。好ましい実施形態では、レーダ高度計30はエアビークルに組み込まれる。レーダ高度計30は、位相アンビギュイティチャネル32、位相Aチャネル34、および位相Bチャネル36の3つのチャネルを含む。チャネル32は、アンテナ40A、低ノイズ増幅器(LNA)42A、ミキサ44A、中間周波数(IF)増幅器46A、およびデジタイザ48Aを含む。低ノイズ増幅器(LNA)42A、ミキサ44A、中間周波数(IF)増幅器46Aが受信機50Aを形成する。チャネル34は、アンテナ40B、LNA42B、ミキサ44B、IF増幅器46B、およびデジタイザ48Bを含む。LNA42B、ミキサ44B、およびIF増幅器46Bは受信機50Bを形成する。チャネル36は、アンテナ40C、送信/受信スイッチ52、LNA42C、ミキサ44C、IF増幅器46C、およびデジタイザ48Cを含む。LNA42C、ミキサ44C、およびIF増幅器46Cは受信機50Cを形成する。チャネル36中の送信/受信スイッチ52は、チャネル36アンテナ40Cが送信モードまたは受信モードで動作することを可能にする。
【0010】
レーダ高度計30は、RF発振器60、クロックジェネレータ62、送信機64、デジタル信号プロセッサ(DSP)66、およびコンピュータ68をさらに含む。送信機64は、電力増幅器70、変調器72、単側波帯(SSB)ミキサ74、および中間周波数(IF)オフセットジェネレータ76を含む。RF発振器60は、ミキサ44A〜44CおよびSSBミキサ74に結合される。クロックジェネレータ62は、デジタイザ48A〜48CおよびIFオフセットジェネレータ76に結合される。
【0011】
レーダ高度計30は、アンテナパターンによって境界が画された、例えば10フィート幅ダウントラックスワス内で、エアビークルの下の最高の対象物までのクロストラックおよび垂直距離を与える。本明細書で使用される「ダウントラック」という用語は移動方向を意味し、本明細書で使用される「クロストラック」という用語は移動方向に対する垂直を意味する。他のアンテナパターンおよびスワス特性を使用することもできる。
【0012】
レーダ高度計30は、レーダ信号を地上に向けて送信するのに使用される。レーダ信号を生成するために、クロックジェネレータ62が、IFオフセットジェネレータ76に例えば120MHzのクロック信号を供給する。IFオフセットジェネレータ76は、レーダ伝送信号のためのオフセット信号を生成する。この例を続けると、オフセットジェネレータ76は、クロックジェネレータ62からの入力クロック信号を4で割り、30MHzのクロック信号を出力する。SSBミキサ74は、IFオフセットジェネレータ76からの30MHzクロック信号をRF発振器60からのRF信号と混合し、その結果RF信号の30MHzオフセットが得られる。SSBミキサ74は、オフセット信号を変調器72に出力する。この例では、RF発振器20は約4.3GHzで動作する。変調器72は、レンジプロセッサ80から送信コードデータを受け取り、SSBミキサ74から受け取った信号をパルス変調および位相変調し、変調後信号を電力増幅器70に出力する。電力増幅器70は、受け取った信号を増幅し、増幅後信号を送信/受信スイッチ52を介してアンテナ40Cに出力する。アンテナ40Cは、変調後信号を地上に向けて送信する。一例として、送信機64は、12ミリ秒の間隔内に約600個のパルスを約20マイクロ秒のパルス間隔で送信する。他の周波数およびパルス分離を使用することもできる。
【0013】
レーダ信号がチャネル36によって送信された後、地上から反射された信号がアンテナ40A〜40Cによって受信され、各チャネル32、34、および36の構成要素によって処理される。チャネル36内のLNA42C、ミキサ44C、IF増幅器46C、およびデジタイザ48Cは、チャネル32および34内の対応する構成要素と同一であり、したがって各チャネル32、34、および36は、他のチャネルと同じ機能を果たす。したがって、チャネル32および34が信号を受信および処理する際に同様に動作するという理解と共に、チャネル36に関連して各機能を説明する。
【0014】
アンテナ40Cによって受信されたエコー信号は、送信/受信スイッチ52を通過し、LNA42Cによって増幅される。ミキサ44Cは、増幅されたエコー信号を、RF発振器60によって出力されたRF発振器信号と混合し、IFオフセット信号をIF増幅器46Cに出力する。IFオフセット信号はIF増幅器46Cによって増幅され、デジタイザ48Cに出力される。デジタイザ48Cは、受け取った信号をデジタル化し、デジタル化信号をDSP66に出力する。クロックジェネレータ62の周波数により、チャネル32、34、および36上の着信アナログ信号がデジタイザ48A〜48Cによってサンプリングおよびデジタル化されるレートが決定される。
【0015】
コンピュータ68は、エアビークルまたは航空機(A/C)の垂直および水平速度データをエアビークルの慣性航法システム(INS)(図示せず)から受け取る。コンピュータ68は、速度データを処理し、ドップラ・スワス・フィルタ制御信号を制御線82上でDSP66に出力する。DSP66は、地上の特定の領域または「スワス」内の最高ポイントの位置を特定するターゲット位置ベクトルを出力し、ビークルの高度を特定するabove ground level(AGL)高度データも出力する。
【0016】
図3に、ビークル102からのターゲット100の位置を示す。一実施形態では、ターゲット100はビークル102内のビデオシステム(図4に図示)によって識別され、ビデオシステムの方位照準角および仰角に基づいて、ターゲットベクトル104が生成される。ターゲットベクトル104に基づいて、ターゲット100の角度位置106が、ビークル102に関してビークル機体座標として求められる。ターゲットベクトル104を受け取るレーダ高度計30(図2に図示)は、ビークル機体座標をビークル102の飛行線に基づく座標に変換する。飛行線に基づく座標はローカル座標またはドップラ座標と呼ばれることもあり、それを図5および図6に関連して以下で説明する。次いでレーダ高度計30は、ビークル102に格納されたデジタル地勢高度図データ110に基づいて、ビークル位置108を一実施形態では緯度、経度、および高度として決定する。ビークル位置108に基づいて、(ドップラ座標に変換された)ビークル機体座標でのターゲット100の位置、およびターゲット100付近のデジタル地勢高度図データに基づいて、緯度、経度、および高度112でのターゲット100の実際の座標が求められる。
【0017】
図4は、上述のターゲット位置特定方法を実現するハイブリッドビデオ/レーダ高度計システム120を示すブロック図である。システム120は、デジタル地勢高度図データ122を受け取るレーダ高度計30(図2にも図示)を含む。ビデオシステム124は、ターゲット100を識別するのに使用される。システム120は、レーダ高度計30、ビデオシステム124、および遠隔基地局128からデータを受け取る遠隔測定送信機/受信機126をさらに含む。一実施形態では、レーダ高度計30は、精密地勢支援ナビゲーション(PTAN)レーダシステムである。ハイブリッドシステム120は、ビークル102、例えば有人または無人航空機上に設置される。ターゲット100はビデオシステム124によって識別され、ターゲット100の角度位置が、遠隔基地局128により、遠隔測定送信機/受信機126から受信されたデータと、デジタル地勢高度122と同様の遠隔基地局128に格納されたデジタル地勢高度図とから、ビークル102に対して求められる。
【0018】
レーダ高度計30は、精密デジタル地勢高度図122からのデータの取込みに基づいて、例えば緯度、経度、および高度によって記述されたビークル102の位置を決定する。緯度、経度、および高度でのビークル102の位置、遠隔測定送信機/受信機126によって与えられる航空機に対するターゲット100の角度位置、ならびにターゲット100付近の地勢高度データにより、システム120が緯度、経度、および高度でのターゲット100の位置を決定することが可能となる。
【0019】
具体的には、一実施形態において、ビデオターゲット認識システムとも呼ばれるビデオシステム124がターゲット100を識別する。精密角度位置、ビークル機体座標での3次元位置が、ビデオシステム124の一部であるカメラの方向に基づいて求められる。ビークル102の飛行線は通常はビークル機体座標と整合しないので、次いで、機体座標での測定されたターゲットベクトル角度(角度位置)がローカル(ドップラ)座標に基づくベクトルに変換される。レーダ高度計30は、精密デジタル地勢高度図122上のビークル102の位置を決定する。ローカル座標でのターゲットベクトルと精密デジタル地勢高度図122上のターゲット100付近の地勢との交点により、ターゲット100の緯度、経度、および高度座標を決定することが可能となる。
【0020】
一実施形態では、遠隔測定送信機/受信機126は、航空機102(例えば無人機)と遠隔基地局128との間の通信リンクである。この実施形態では、航空機102が飛行経路に沿って飛行するとき、ターゲット100を取得するためにビデオシステム124が使用される。遠隔基地局128のオペレータは、ビデオシステム124の視野(FOV)を制御することができる。可能な注目点(例えばターゲット100)を見る際に、オペレータはズームインし、(遠隔測定送信機/受信機126を介して)ビデオシステム124の照準方位角および仰角を調節し、取得したターゲット100を、狭まったビデオシステム124のFOV内に保ち、制御された角度を実現する。制御された角度は、航空機102に対するターゲット100の位置を与える角度を含む。
【0021】
この取得期間の間、レーダ高度計30も、遠隔測定送信機/受信機126を使用する遠隔基地局128へのデジタル地勢高度図122に基づいて航空機102の位置を提供している。遠隔基地局128は、基地局128自体のデジタル地勢高度図を使用して航空機102の位置を突き止める。遠隔基地局128も遠隔測定送信機/受信機126からビデオシステム124の照準角を受信しているので、基地局128は、ターゲット100の緯度、経度、および高度の幾何学的に突き止めるのに必要なすべてのデータを格納している。
【0022】
図5および図6は、ビークル機体座標でのターゲット100の角度位置からローカル(ドップラ)座標ベクトルへの変換を示す。図5は機体座標系150を示す。機体座標系は、ビークル102のボディに対する座標系である。x軸Xmは、ビークル102のボディのノーズを通る軸である。y軸Ymは、Xmから90度である軸であり、ビークル102のボディの右側に対して正である。z軸Zmは、XmとYmの両方から90度である軸であり、ビークル102のボディの底部に対して垂直である。ビークル操縦に関して、正のロールは右翼の降下であり、正のピッチはノーズアップであり、正のヨーはノーズから右の向きである(すべて飛行線に対して)。
【0023】
エアビークル、例えばビークル102は通常、その機体座標と整合して飛行しないことが知られている。そのような飛行経路は飛行線と呼ばれることがある。したがって、ピッチ、ロール、またはヨーのうちの1つまたは複数で飛行中であり、ハードマウントされたレーダシステム、例えば(図2に示す)レーダ高度計30を有する航空機は、機体座標でターゲット位置を決定する際に誤差要素を導入する。そのようなレーダは通常は飛行線に対して動作するので、飛行線に関する座標系が開発され、その座標系はローカル座標またはドップラ座標系と呼ばれることがある。図6に、ビークル機体座標とローカル座標との差を示す。ローカル座標系のx軸Xdはビークルの飛行線上にある。Xdに直角なy軸Ydおよびz軸Zdがそれぞれ、Xdを横切り、Xdの上および下にあるものとして定義される。
【0024】
したがって、ビークル102がピッチ、ロール、またはヨーなしで飛行中の場合、機体座標系はローカル座標系と整合する。正のロールでは、XmおよびXdは依然として整合されるが、YdはYmの下に回転し、ZdはZmの左側に回転する。正のヨーでは、XdはXmの右側に回転し、YdはYmの後方に回転し、ZdおよびZmが整合する。正のピッチでは、XdはXmの上に回転し、YdはYmと整合し、ZdはZmの前方に回転する。
【0025】
ピッチ、ロール、およびヨーのうちの複数を有することの効果、ならびにビークル機体座標でのターゲット位置の決定は明らかである。上述のシステムおよび方法は、実際のビークルの位置およびビークルの飛行線に基づくターゲット位置特定機能を提供する。ビークルの飛行線と整合しないビークルを有することによって生成される誤差を除去する、緯度、経度、および高度での実際のターゲット位置の決定。そのような位置決定は、やはり明らかである利点を有する。機体座標とローカル座標との間の関係がほぼ確実に常に変化する関係であり、一方、ターゲット緯度位置、経度位置、および高度位置は通常は一定であるからである。ターゲットの緯度位置、経度位置、および高度位置を有することにより、ターゲットに関係する任意のタイプの動作(すなわちミサイル攻撃、着陸、ターゲット内容の識別)が企図されるときにより高い確実性が得られる。
【0026】
さらに、ターゲットの位置を与えるのにGPSシステムは不要である。レーダ高度計30とビデオシステム124の組合せは、遠隔測定送信機/受信機126と遠隔基地局128の通信リンクと一緒に、上述のように妨害の影響を受けやすいGPSシステムへの依存を低減または解消する。
【0027】
本発明を様々な特定の実施形態によって説明したが、特許請求の範囲の精神および範囲内の修正形態で本発明を実施できることを当業者は理解されよう。
【図面の簡単な説明】
【0028】
【図1】ターゲット位置を決定する一方法を示すフローチャートである。
【図2】レーダ高度計のブロック図である。
【図3】ビークルからのターゲット位置を示す図である。
【図4】ビデオシステムおよびレーダ高度計を示すブロック図である。
【図5】機体座標系を示す図である。
【図6】機体座標系に対するローカル座標系を示す図である。
【特許請求の範囲】
【請求項1】
ビデオシステムを使用してターゲット(100)を識別するステップ(12)と、
前記ビークルに関する前記ターゲットに対する角度位置ベクトル(104)を決定するステップ(14)と、
デジタル地勢高度図(122)を使用してビークルの位置108を決定するステップ(16)と、
前記角度位置ベクトルが前記デジタル地勢高度図と交差する位置を計算するステップと、
ビークル位置ならびに前記角度位置ベクトルとデジタル地勢高度図との交点の位置に基づいてターゲット位置(112)を生成するステップ(18)と、
を含むビークル(102)からターゲット位置を決定する方法。
【請求項2】
前記ビークル(102)の位置108を決定するステップ(16)は、前記ビークルの緯度、経度、および高度を決定するステップを含む、請求項1に記載の方法。
【請求項3】
前記ビークル(102)の位置108を決定するステップ(16)は、レーダ高度計(30)およびデジタル地勢高度図(122)を使用して前記ビークルの位置を決定するステップを含む、請求項1に記載の方法。
【請求項4】
前記ターゲットに対する角度位置ベクトル(104)を決定するステップ(14)は、ビークル機体座標における前記ターゲットに対する角度位置ベクトルを決定するステップを含む、請求項1に記載の方法。
【請求項5】
前記角度位置ベクトル(104)をローカル座標に変換するステップをさらに含む、請求項4に記載の方法。
【請求項6】
前記ビークル(102)の前記角度位置ベクトル(104)および前記位置108を、デジタル地勢高度図(122)を含む遠隔基地局(128)に送信するステップをさらに含む、請求項1に記載の方法。
【請求項7】
ターゲット位置(112)を与えるステップは、前記遠隔基地局から前記ビークル(102)に前記ターゲット位置を送信するステップを含む、請求項6に記載の方法。
【請求項8】
前記ビークル(102)に関する前記ターゲット(100)に対する角度位置ベクトル(104)を決定するステップは、前記遠隔基地局(128)からビデオシステム(124)の視野を制御するステップを含む、請求項1に記載の方法。
【請求項9】
視野を制御するステップは、
前記ターゲットにズームインし、前記ビデオシステム(124)の視野を狭めるステップと、
前記ビデオシステムの照準方位角および仰角を調節して、狭まった視野内に前記ターゲットを保つステップと
を含む、請求項8に記載の方法。
【請求項10】
遠隔測定送信機/受信機126と、
前記遠隔測定送信機/受信機に通信可能に結合されたレーダ高度計30であって、デジタル地勢高度図(122)を使用してビークルの位置108を求め、前記ビークルの前記位置を前記遠隔測定送信機/受信機に与えるレーダ高度計と、
前記遠隔測定送信機/受信機に通信可能に結合され、ターゲット(100)を識別し、前記ターゲットの角度位置ベクトル(104)を前記遠隔測定送信機/受信機に与えるビデオシステム(124)とを備え、
前記角度位置ベクトル、前記ビークル位置、および前記ターゲット付近のデジタル地勢高度図を使用して前記ターゲットの位置(122)を決定する、
ビークル102と共に使用するためのターゲット位置特定システム。
【請求項11】
前記レーダ高度計(30)は、デジタル地勢高度図(122)を使用して、緯度、経度、および高度によって前記ビークル(102)の位置108を決定する、請求項10に記載のターゲット位置特定システム。
【請求項12】
前記ターゲット(100)の位置(112)は、緯度、経度、および高度によって与えられる、請求項10に記載のターゲット位置特定システム。
【請求項13】
前記ビデオシステム(124)は、ビークル機体座標におけるターゲット(100)に関する角度位置ベクトル(104)を与える、請求項10に記載のターゲット位置特定システム。
【請求項14】
前記遠隔測定送信機/受信機(126)に通信可能に結合された、デジタル地勢高度図(122)を有する遠隔基地局(128)を備える、請求項10に記載のターゲット位置特定システム。
【請求項15】
前記遠隔測定送信機/受信機(126)は、前記ビークル(100)の前記角度位置ベクトル(104)および前記位置を前記遠隔基地局(128)に送信する、請求項14に記載のターゲット位置特定システム。
【請求項16】
前記遠隔基地局(128)は、ターゲット位置(112)を前記遠隔測定送信機/受信機(126)に送信する、請求項14に記載のターゲット位置特定システム。
【請求項17】
前記ビデオシステム(124)の視野は前記遠隔基地局(128)から制御される、請求項14に記載のターゲット位置特定システム。
【請求項18】
前記ビデオシステム(124)は、照準方位角および仰角を調節して、視野内に前記ターゲットを保つ、請求項14に記載のターゲット位置特定システム。
【請求項1】
ビデオシステムを使用してターゲット(100)を識別するステップ(12)と、
前記ビークルに関する前記ターゲットに対する角度位置ベクトル(104)を決定するステップ(14)と、
デジタル地勢高度図(122)を使用してビークルの位置108を決定するステップ(16)と、
前記角度位置ベクトルが前記デジタル地勢高度図と交差する位置を計算するステップと、
ビークル位置ならびに前記角度位置ベクトルとデジタル地勢高度図との交点の位置に基づいてターゲット位置(112)を生成するステップ(18)と、
を含むビークル(102)からターゲット位置を決定する方法。
【請求項2】
前記ビークル(102)の位置108を決定するステップ(16)は、前記ビークルの緯度、経度、および高度を決定するステップを含む、請求項1に記載の方法。
【請求項3】
前記ビークル(102)の位置108を決定するステップ(16)は、レーダ高度計(30)およびデジタル地勢高度図(122)を使用して前記ビークルの位置を決定するステップを含む、請求項1に記載の方法。
【請求項4】
前記ターゲットに対する角度位置ベクトル(104)を決定するステップ(14)は、ビークル機体座標における前記ターゲットに対する角度位置ベクトルを決定するステップを含む、請求項1に記載の方法。
【請求項5】
前記角度位置ベクトル(104)をローカル座標に変換するステップをさらに含む、請求項4に記載の方法。
【請求項6】
前記ビークル(102)の前記角度位置ベクトル(104)および前記位置108を、デジタル地勢高度図(122)を含む遠隔基地局(128)に送信するステップをさらに含む、請求項1に記載の方法。
【請求項7】
ターゲット位置(112)を与えるステップは、前記遠隔基地局から前記ビークル(102)に前記ターゲット位置を送信するステップを含む、請求項6に記載の方法。
【請求項8】
前記ビークル(102)に関する前記ターゲット(100)に対する角度位置ベクトル(104)を決定するステップは、前記遠隔基地局(128)からビデオシステム(124)の視野を制御するステップを含む、請求項1に記載の方法。
【請求項9】
視野を制御するステップは、
前記ターゲットにズームインし、前記ビデオシステム(124)の視野を狭めるステップと、
前記ビデオシステムの照準方位角および仰角を調節して、狭まった視野内に前記ターゲットを保つステップと
を含む、請求項8に記載の方法。
【請求項10】
遠隔測定送信機/受信機126と、
前記遠隔測定送信機/受信機に通信可能に結合されたレーダ高度計30であって、デジタル地勢高度図(122)を使用してビークルの位置108を求め、前記ビークルの前記位置を前記遠隔測定送信機/受信機に与えるレーダ高度計と、
前記遠隔測定送信機/受信機に通信可能に結合され、ターゲット(100)を識別し、前記ターゲットの角度位置ベクトル(104)を前記遠隔測定送信機/受信機に与えるビデオシステム(124)とを備え、
前記角度位置ベクトル、前記ビークル位置、および前記ターゲット付近のデジタル地勢高度図を使用して前記ターゲットの位置(122)を決定する、
ビークル102と共に使用するためのターゲット位置特定システム。
【請求項11】
前記レーダ高度計(30)は、デジタル地勢高度図(122)を使用して、緯度、経度、および高度によって前記ビークル(102)の位置108を決定する、請求項10に記載のターゲット位置特定システム。
【請求項12】
前記ターゲット(100)の位置(112)は、緯度、経度、および高度によって与えられる、請求項10に記載のターゲット位置特定システム。
【請求項13】
前記ビデオシステム(124)は、ビークル機体座標におけるターゲット(100)に関する角度位置ベクトル(104)を与える、請求項10に記載のターゲット位置特定システム。
【請求項14】
前記遠隔測定送信機/受信機(126)に通信可能に結合された、デジタル地勢高度図(122)を有する遠隔基地局(128)を備える、請求項10に記載のターゲット位置特定システム。
【請求項15】
前記遠隔測定送信機/受信機(126)は、前記ビークル(100)の前記角度位置ベクトル(104)および前記位置を前記遠隔基地局(128)に送信する、請求項14に記載のターゲット位置特定システム。
【請求項16】
前記遠隔基地局(128)は、ターゲット位置(112)を前記遠隔測定送信機/受信機(126)に送信する、請求項14に記載のターゲット位置特定システム。
【請求項17】
前記ビデオシステム(124)の視野は前記遠隔基地局(128)から制御される、請求項14に記載のターゲット位置特定システム。
【請求項18】
前記ビデオシステム(124)は、照準方位角および仰角を調節して、視野内に前記ターゲットを保つ、請求項14に記載のターゲット位置特定システム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公表番号】特表2007−501945(P2007−501945A)
【公表日】平成19年2月1日(2007.2.1)
【国際特許分類】
【出願番号】特願2006−533631(P2006−533631)
【出願日】平成16年6月9日(2004.6.9)
【国際出願番号】PCT/US2004/018259
【国際公開番号】WO2005/036099
【国際公開日】平成17年4月21日(2005.4.21)
【出願人】(500575824)ハネウェル・インターナショナル・インコーポレーテッド (1,504)
【Fターム(参考)】
【公表日】平成19年2月1日(2007.2.1)
【国際特許分類】
【出願日】平成16年6月9日(2004.6.9)
【国際出願番号】PCT/US2004/018259
【国際公開番号】WO2005/036099
【国際公開日】平成17年4月21日(2005.4.21)
【出願人】(500575824)ハネウェル・インターナショナル・インコーポレーテッド (1,504)
【Fターム(参考)】
[ Back to top ]